Изобретение относится к области машиностроения и может быть использовано при конструировании механизмов, в которых необходимо в широких пределах изменять передаточное отношение, оптимизирующее управление вращением ведомого вала при постоянных оборотах вала двигателя. Примером такого механизма может быть регулятор давления жидкости за насосом в магистральном трубопроводе.
Для управления давлением жидкостей используют электропривод с регуляторами различных типов. Частотные регуляторы, управляющие частотой вращения электродвигателя позволяют регулировать давление на выходе, но при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери возрастают. Работа частотных преобразователей описана, например, в: Режим работы асинхронных и синхронных электродвигателей [Текст] / И.А. Сыромятников. Госэнергоиздат, 1963. При использовании для вращения насоса не электрического двигателя, а иного источника энергии регулирование давления усложняется, либо применяется байпасирование. Использование клапанов перепуска приводит к значительному снижению коэффициента полезного действия и к колебаниям давления в сети. Используются для управления оборотами вала насоса также различные механические преобразователи и редукторы. Известны различные пути согласования передаточного отношения при передаче движения от двигателя к исполнительному механизму. Наиболее распространенным способом являются зубчатый редуктор и муфты скольжения. Эти механизмы описаны, например, в: Артоболевский И.И. «Механизмы в современной технике». Том 4 «Зубчатые механизмы» и Том 5 «Фрикционные механизмы». М.: Наука, 1980 г.
Задачей изобретения является создание устройства для автоматического регулирования давления жидкости, поддержания его величины на заданном уровне, при использовании любого типа привода насоса, достижение максимально возможной экономичности работы насоса.
Поставленная цель достигается тем, что двигатель привода подключен на вход дифференциала, который установлен концентрично оси привода и имеет возможность вращаться вокруг оси, один выход дифференциала подключен к ведомому валу, а второй к ведущей части, якорю или индуктору, управляемой электроиндукционной силовой муфты скольжения, ответная часть которой соединена с валом привода. При вращении сила индукции увлекает якорь за индуктором и частично блокирует дифференциал. Часть электроиндукционной муфты, подключенная к дифференциалу, стремится вращаться в сторону, обратную направлению вращения якоря, а сила индукции, возникающая при скольжении индуктора и якоря электроиндукционной муфты, увлекает индуктор за якорем. Это частично блокирует дифференциал и уменьшает передачу вращения через его элементы, уменьшая суммарное передаточное отношение, которое состоит из вращения дифференциала вокруг оси и передаточного отношения редуктора дифференциала. Взаимодействуя, эти две противоположно направленные силы уравновешиваются в промежуточном состоянии и устанавливают суммарное передаточное отношение. При увеличении давления в сети увеличивается нагрузка на выходном валу, он тормозится, скольжение в электроиндукционной муфте увеличивается, вращение от привода к насосу в большей степени передается через элементы дифференциала, суммарное передаточное отношение увеличивается, скорость вращения выходного вала, вращающего насос, уменьшается. При уменьшении давления в сети, нагрузка уменьшается, скольжение между индуктором и якорем электроиндукционной муфты уменьшается, вращение элементов редуктора относительно друг друга уменьшается, движение на выходной вал в большей степени передается через вращение дифференциала вокруг оси, при этом суммарное передаточное отношение уменьшается, скорость вращения насоса возрастает. Для контроля и корректировки величины давления в сети используют любой известный способ управления взаимоиндукцией между якорем и индуктором электроиндукционной муфты. Датчик давления, например, может управлять изменением величины электрического тока возбуждения на индукторе электроиндукционной муфты либо изменением взаимного положения индуктора и якоря, изменением зазора между ними, если магниты индуктора постоянные. Это позволяет регулировать давление чисто механическим путем, при отсутствии электрического тока.
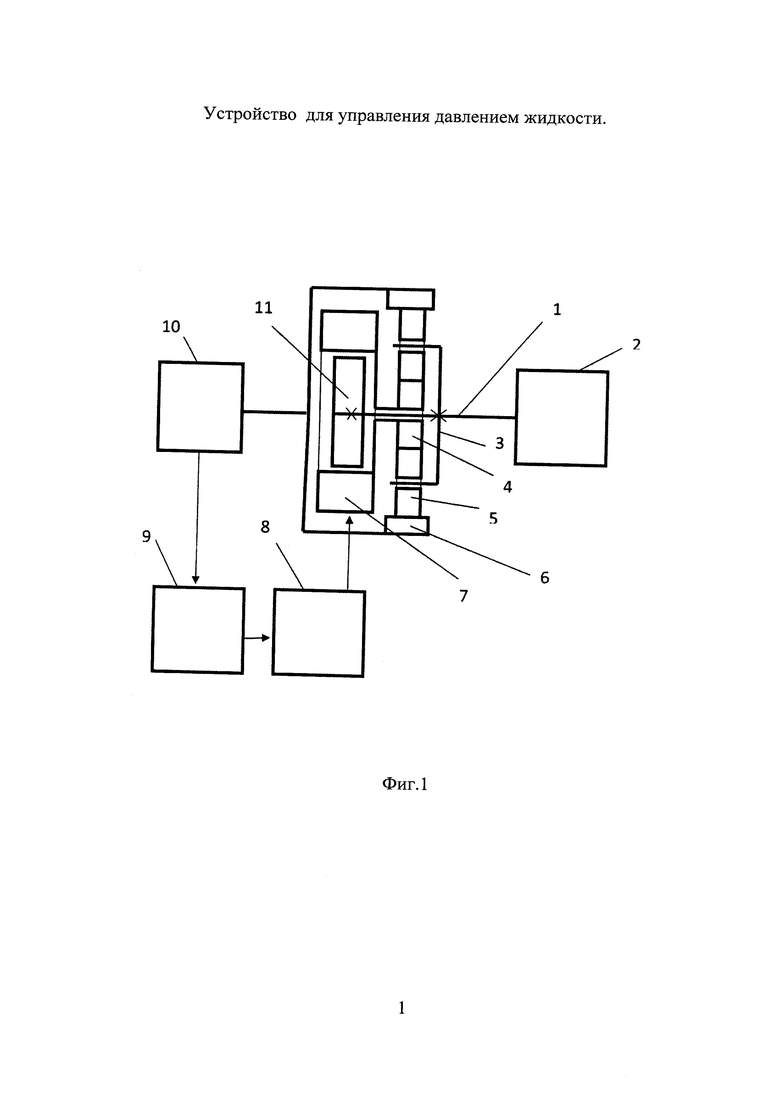
Изобретение поясняется чертежом.
На Фиг. 1 для примера показана возможная схема механизма. Вал 1 привода 2 вращает водило планетарного дифференциала 3 и якорь 11 электроиндукционной муфты. Центральная шестерня 4 свободно вращается на валу 1 и соединена с индуктором электроиндукционной муфты 7. Сателлиты 5 свободно вращаются на водиле 3 и передают вращение на венец планетарной передачи 6, соединенный с насосом 10. Сигнал давления передается на датчик 9, который вырабатывает управляющее действие для блока управления 8, изменяющий взаимную индукцию между якорем и индуктором электроиндукционной муфты. При уменьшении давления за насосом 10, датчик давления 9, передает сигнал на блок управления 8, который, производит действие на увеличение взаимоиндукции между якорем и индуктором электроиндукционной муфты. Это в большей степени блокирует дифференциал, тогда вращение в большей степени передается на насос через вращение дифференциала вокруг своей оси, передаточное отношение от двигателя к насосу уменьшается, выходной вал ускоряется, давление увеличивается. При увеличении давления на выходе насоса, блок управления уменьшает взаимоиндукцию между якорем и индуктором, скольжение между якорем и индуктором увеличивается, передаточное отношение от двигателя к насосу увеличивается, ведомый вал замедляется, давление за насосом уменьшается.
Обороты вала привода могут оставаться постоянными во всем диапазоне регулирования оборотов насоса. Экономичность работы заключается в том, что оба плеча дифференциала вращают насос в одну сторону. Расходуется энергия при управлении давлением только на скольжение между якорем и индуктором электроиндукционной муфты и на потери в элементах дифференциала. Изменение расхода воды, при постоянном давлении, в магистрали может быть от максимально возможного, который может обеспечить двигатель до режима холостого хода двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2651388C1 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТА | 2021 |
|
RU2771932C1 |
| Устройство преобразующее обороты и момент вращения двигателя | 2020 |
|
RU2726378C1 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТА | 2019 |
|
RU2730094C1 |
| ГИБРИДНЫЙ ПРИВОД | 2013 |
|
RU2527625C1 |
| Трансмиссия гибридного транспортного средства | 2018 |
|
RU2688110C1 |
| Электромеханическая трансмиссия для гибридного транспорта | 2022 |
|
RU2788457C1 |
| АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ ВНУТРИ КОЛЕСА | 2016 |
|
RU2658226C2 |
| Трансмиссия для электротранспорта | 2022 |
|
RU2790299C1 |
| Механизм соединения мотора с генератором для преобразования крутящего момента | 2018 |
|
RU2675305C1 |
Изобретение относится к регулятору давления жидкости за насосом в магистральном трубопроводе. Вал привода подключен на вход дифференциала, который установлен концентрично оси привода и имеет возможность вращаться вокруг оси. Один выход дифференциала подключен к ведомому валу, приводящему насос, а второй - к ведущей части, якорю или индуктору управляемой электроиндукционной силовой муфты скольжения. Ответная часть муфты скольжения соединена с валом привода. Коррекция давления производится блоком управления, который получает сигнал от датчика давления и изменяет в соответствие с ним электрическую индукцию между якорем и индуктором, изменяя силу, блокирующую дифференциал, а значит и передаточное отношение от привода к насосу. Управлять силой, блокирующей дифференциал, можно изменением величины электрического тока возбуждения на индукторе электроиндукционной муфты либо изменением взаимного положения индуктора и якоря, изменением зазора между ними, если магниты индуктора постоянные. Достигается упрощение конструкции. 2 з.п. ф-лы, 1 ил.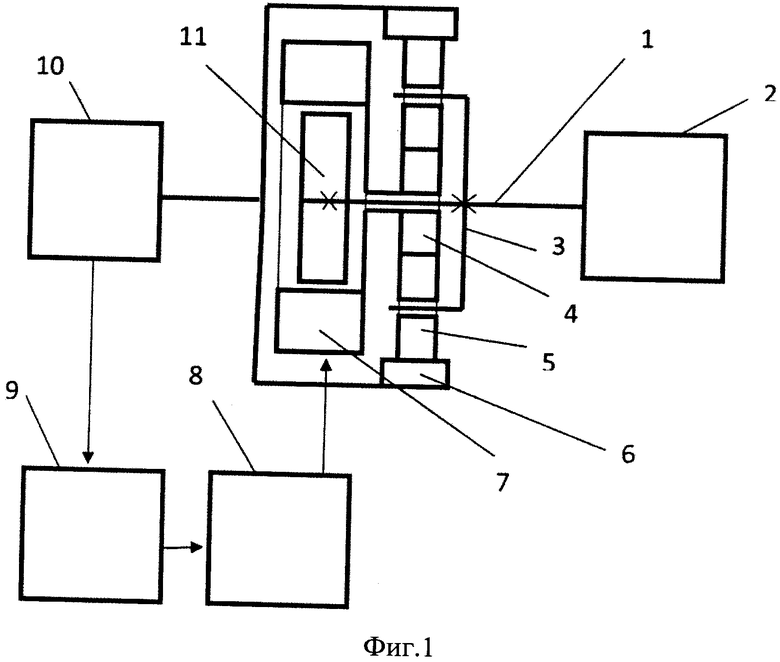
1. Устройство для управления давлением жидкости, отличающееся тем, что привод насоса содержит дифференциал и электроиндукционную муфту, причем дифференциал установлен концентрично приводной оси и имеет возможность вращаться вокруг оси, один выход дифференциала подключен к ведомому валу, приводящему насос, а второй к ведущей части - якорю управляемой электроиндукционной силовой муфты скольжения, ответная часть которой соединена с валом привода, и при вращении сила индукции увлекает якорь за индуктором и частично блокирует дифференциал, а часть электроиндукционной муфты, подключенная к дифференциалу, стремится вращаться в сторону, обратную направлению вращения якоря, и сила индукции, возникающая при скольжении индуктора и якоря электроиндукционной муфты, увлекает индуктор за якорем, что частично блокирует дифференциал и уменьшает передачу вращения через его элементы, уменьшая суммарное передаточное отношение, которое состоит из вращения дифференциала вокруг оси и передаточного отношения редуктора дифференциала, тогда при взаимодействии, эти две противоположно направленные силы уравновешиваются в промежуточном состоянии и определяют суммарное передаточное отношение, при этом коррекция давления производится блоком управления, который получает сигнал от датчика давления и изменяет в соответствии с ним электрическую индукцию между якорем и индуктором, изменяя силу, блокирующую дифференциал, а значит и передаточное отношение от привода к насосу.
2. Устройство для управления давлением жидкости по п. 1, отличающееся тем, что датчик давлени, управляет изменением величины электрического тока возбуждения на индукторе электроиндукционной муфты либо изменением взаимного положения индуктора и якоря, изменением зазора между ними, если магниты индуктора постоянные, что позволяет регулировать давление чисто механическим путем, при отсутствии электрического тока.
3. Устройство для управления давлением жидкости по п. 1, отличающееся тем, что привод насоса может быть любым, а регулирование давления при постоянных оборотах вала привода происходит во всем диапазоне расхода жидкости, от максимально возможного до режима холостого хода двигателя.
| ПРИВОД | 1999 |
|
RU2238193C2 |
| RU 95104554 A1, 27.11.1996 | |||
| ГИБРИДНЫЙ ПРИВОД | 2013 |
|
RU2527625C1 |
| ЗАТРАВКА МАШИНЫ НЕПРЕРЫВНОГО ЛИТЬЯ ЗАГОТОВОК | 2010 |
|
RU2424081C1 |

