ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к сканерам, используемым для обеспечения безопасности в аэропортах и тюрьмах, в частности к системе обнаружения запрещенных веществ (в частности, наркотиков), незаконно провозимых во внутренних полостях организма пассажира или посетителя мест лишения свободы.
УРОВЕНЬ ТЕХНИКИ
[0002] В настоящее время в системах обеспечения безопасности в аэропортах, тюрьмах и общественных местах применяют микроволновые и рентгеновские сканеры, работающие по принципу проникающего или отраженного излучения. С помощью таких сканеров производят сканирование (например) пассажиров на предмет наличия у них на теле или внутри организма запрещенных объектов без применения ручного личного обыска/досмотра. Существующие сканеры отображают найденные объекты на экране монитора оператора, оператор производит визуальную проверку полученных изображений, а затем принимает решение пропустить человека либо задержать его для проведения дополнительного сканирования или ручного досмотра. Однако существующий подход отличается медлительностью и низкой эффективностью, поскольку в значительной мере зависит от состояния оператора, который к концу смены может устать, что, в свою очередь, увеличивает вероятность принятия неверного решения или пропуска подозрительного объекта. Следовательно, существует потребность в способе автоматического анализа и обнаружения запрещенных объектов и субстанций.
[0003] Кроме того, существующие системы и способы малоэффективны при обнаружении наркотиков, незаконно перевозимых в животе человека. Известна система обнаружения и локализации объектов на основании их формы (см. патент US 8,437,556). Изображение сегментируют на отдельные объекты, которые затем классифицируют исходя из их геометрических параметров и внешнего сходства с подозрительными объектами. Однако данный способ нельзя использовать для обнаружения наркотиков, находящихся в полости живота, поскольку из-за низкой контрастности между пакетиками/капсулами, содержащими наркотики, и фоном (областью живота) такие изображения не поддаются сегментированию.
Иными словами, без значительных человеческих усилий надежно выделить на изображении пакетики/капсулы, содержащие наркотики, не представляется возможным.
[0004] Также известен способ обнаружения жидкостей в багаже (см. патентную публикацию US 20150010128). Данный способ основан на сегментировании объектов и их атомных номерах, полученных посредством метода двойной энергии. Однако данный подход нельзя использовать для обнаружения наркотиков, находящихся в полости живота. Также существует способ автоматического обнаружения скрытых объектов с помощью микроволновых сканеров (см. патент US 8,774,461). Данный способ включает в себя анализ подборки последовательных снимков поверхности тела человека. Однако данный способ нельзя применить для обнаружения наркотиков, находящихся в полости живота, поскольку он основан, прежде всего, на выявлении впадин и выпуклостей на поверхности тела человека.
[0005] Также известен способ автоматического обнаружения, описанный в публикации Д. Мери (Mery, D. (2011), Automated Detection of Welding Discontinuities without Segmentation, Materials Evaluation, C. 657-663.). Данный способ применяется для обнаружения дефектов сварочных швов посредством метода скользящих окон. Однако область живота человека имеет много отклонений и производит визуальный шум, что мешает получать достоверную информацию без дополнительной фильтрации данных, полученных посредством классификатора окон (участков).
[0006] Соответственно, существует потребность в данной области техники в эффективном способе автоматического обнаружения запрещенных веществ, незаконно провозимых во внутренних полостях человека, в частности внутри пищеварительного тракта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Настоящее изобретение относится к сканерам, используемым для обеспечения безопасности в аэропортах и тюрьмах, в частности к системе и способу автоматического обнаружения запрещенных веществ, незаконно провозимых во внутренних полостях человека. Цель изобретения - в значительной мере преодолеть один или более недостатков существующего уровня техники.
[0008] В одном аспекте раскрыт способ автоматического обнаружения запрещенных веществ, незаконно провозимых во внутренних полостях организма. Предлагаемый способ обеспечивает автоматическое обнаружение наркотиков, скрытых в области живота пассажира, с помощью изображений, получаемых посредством рентгеновского сканера. Согласно одному из вариантов осуществления изобретения, для увеличения пропускной способности сканера используют автоматизированный алгоритм обнаружения, обеспечивающий более быстрое получение результата по сравнению с визуальным анализом, выполняемым человеком (оператором). Оператор принимает участие в работе системы только в случае обнаружения наркотиков. Данный способ автоматического обнаружения обеспечивает стабильный уровень точности обнаружения, поскольку посредством его устраняется влияние усталости оператора на процесс обнаружения наркотиков. Также он позволяет сделать процесс обнаружения наркотиков более эффективным и экономичным, поскольку требует лишь наличия нескольких квалифицированных операторов, которые могут работать на нескольких сканерах одновременно.
[0009] Дополнительные признаки и преимущества настоящего изобретения приведены в нижеследующем описании и частично будут очевидны из этого описания или из практики применения настоящего изобретения. Цели и другие преимущества настоящего изобретения реализуются и достигаются с помощью структуры, приведенной в описании и формуле изобретения, а также на приложенных чертежах.
[0010] Следует отметить, что вышеприведенное общее описание и нижеследующее подробное описание являются примерными и носят поясняющий характер и предназначены для пояснения изобретения, определяемого формулой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Прилагаемые чертежи, которые включены в состав и образуют часть этого описания, иллюстрируют варианты осуществления, соответствующие данному изобретению, и вместе с данным описанием служат для разъяснения принципов данного изобретения.
[0012] На чертежах:
[0013] Фиг. 1 представляет собой пример изображения, обрабатываемого настоящим способом.
[0014] На Фиг. 2 показан пример определения положения торса и выделение области живота.
[0015] Фиг. 3 представляет собой контрастное изображение, на котором выделены подозрительные участки.
[0016] На Фиг. 4 показан алгоритм обнаружения наличия наркотиков в соответствии с одним из вариантов осуществления.
[0017] На Фиг. 5 приведена блок-схема загрузки снимка для анализа и подготовки данных для дальнейшего выполнения алгоритма.
[0018] На Фиг. 6 приведена блок-схема построения (или обучения) классификатора для распознавания высококонтрастных объектов.
[0019] На Фиг. 7 показана классификация высококонтрастных объектов в области живота на новых изображениях.
[0020] На Фиг. 8 показан пример сегментирования областей изображения, полученного со сканера.
[0021] На Фиг. 9 показаны относительные вертикальные и горизонтальные координаты центра области живота.
[0022] На Фиг. 10 приведена блок-схема построения классификатора для участков, в которых обнаружено наличие наркотиков.
[0023] На Фиг. 11 приведена блок-схема поиска подозрительных участков, которые могут содержать наркотики.
[0024] На Фиг. 12 показаны контрастные участки области живота и карты этих участков после удаления с них высококонтрастных объектов.
[0025] На Фиг. 13 показаны примеры расположения участков обнаружения.
[0026] На Фиг. 14 показан пример вычисления ротационно инвариантных периодических признаков для матрицы коэффициентом размерностью 2×2.
[0027] На Фиг. 15 приведена блок-схема построения классификатора изображений.
[0028] На Фиг. 16 приведена блок-схема классификации изображений на предмет наличия на них наркотиков.
[0029] На Фиг. 17 показано расположение подозрительных подучастков области живота, где могут быть обнаружены наркотики.
[0030] На Фиг. 18 показано распределение изображений исходя из вероятности того, что на них отсутствуют наркотики.
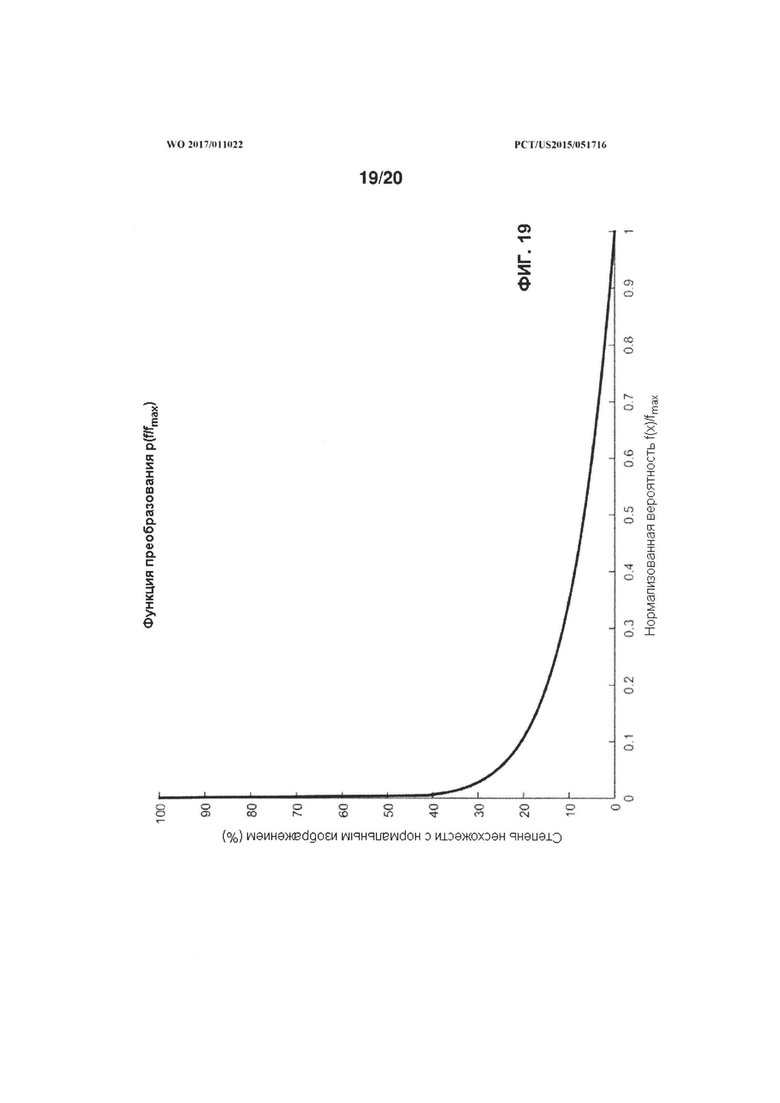
[0031] На Фиг. 19 приведен пример функции преобразования p(ƒ/ƒmax) при у=0,1.
[0032] На Фиг. 20 показана гистограмма несхожести.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0033] Ниже следует подробное описание предпочтительных вариантов настоящего изобретения со ссылками на прилагаемые чертежи.
[0034] Предлагается алгоритм, система и компьютерная программа для осуществления способа автоматического обнаружения наркотиков, скрытых в области живота пассажира, с помощью изображений, получаемых посредством рентгеновского сканера. Согласно одному из вариантов осуществления изобретения, для увеличения пропускной способности сканера используют автоматизированный алгоритм обнаружения, обеспечивающий более быстрое получение результата по сравнению с визуальным анализом, выполняемым человеком (оператором). В одном из вариантов осуществления оператор принимает участие в работе системы только в случае обнаружения наркотиков. Данный способ автоматического обнаружения обеспечивает стабильный уровень точности обнаружения, поскольку посредством его устраняется влияние усталости оператора на процесс обнаружения наркотиков. Также он позволяет сделать процесс обнаружения наркотиков более эффективным и экономичным, поскольку требует лишь наличия нескольких квалифицированных операторов, которые могут работать на нескольких сканерах одновременно.
[0035] Согласно одному из вариантов осуществления, алгоритм обнаружения может применяться для классификации любых изображений путем обнаружения небольшого объекта или нескольких объектов в конкретной области, где размер отдельных объектов мал по сравнению с размером самой области. Для поиска наркотиков, спрятанных в области живота, используют дополнительные изображения, полученные из исходного изображения. Данные дополнительные изображения могут использоваться в виде логарифмических или контрастных картинок. Кроме того, используют изображения, содержащие карты салиентности.
[0036] Логарифмические картинки отражают степень поглощения радиационного потока различными объектами и частями тела. Контрастные изображения позволяют визуализировать мельчайшие детали и предоставляют надежные данные о свойствах изображений. Карты салиентности изображений позволяют обнаруживать объекты в заданном масштабе. Параметры карт салиентности выбирают с целью визуализации мешочков (или пакетов) с наркотиками, спрятанных в области живота человека.
[0037] В одном из вариантов осуществления может быть использован метод скользящих окон. В этом методе классифицируют окно обнаружения, которое проходит по всей области живота. Далее, необходимо отличить участки, содержащие наркотики, причем не только от довольно равномерных участков живота, но и от низкоконтрастных анатомических объектов (в частности, ребра, позвоночник, кости таза и т.д.), а также высококонтрастных неанатомических объектов. Согласно одному из вариантов осуществления, классификацию окон (участков области живота), которые могут содержать наркотики, осуществляют следующим образом:
[0038] - фильтруют низкоконтрастные анатомические участки исходя из их расположения, определяемого по относительным координатам, которые симметричные по отношению к оси симметрии тела;
[0039] - чтобы отфильтровать высококонтрастные неанатомические объекты, проводят поиск данных объектов с помощью соответствующего классификатора и затем удаляют участки, содержащие данные объекты.
[0040] Относительные координаты (см. Фиг. 9) позволяют группировать анатомические объекты определенного типа у разных людей, поскольку координаты имеют близкие значения. Данные координаты также симметричны по отношению к оси симметрии тела, а анатомические объекты справа и слева от позвоночного столба также имеют близкие значения координат. Путем группировки различных типов анатомических объектов становится возможным эффективно фильтровать объекты при классификации участков, на которых есть наркотики (или есть подозрение на наличие наркотиков).
[0041] Для того чтобы обнаружить высококонтрастные объекты, производят сегментацию подозрительных областей, а затем проверяют их с использованием высококонтрастного классификатора. Для улучшения работы классификатора участков используют ротационно инвариантные признаки и признаки, построенные на основе периодических свойств (таких как коэффициенты Фурье или косинусного преобразования). Ротационно инвариантные признаки гарантируют, что в любом направлении (в частности, по горизонтали или по диагонали) одна и та же частотность составляет входные параметры в одно общее свойство, а не для нескольких различных коэффициентов, как в случае с повторяющимися периодическими признаками.
[0042] Однако для корректного и надежного обнаружения наркотиков необходимо построение классификатора изображений на основе классификационных данных каждого отдельного участка. Такой классификатор изображений может быть основан на методе обнаружения аномалий/отклонений, поскольку количество изображений, на которых нет наркотиков, значительно превышает количество изображений, на которых наркотики есть. Так, на основе классификационных данных участков формируют подборку признаков изображений. Метод исходит из того, что на изображениях без наркотиков признаки имеют многомерное нормальное распределение, в то время как изображения с наркотиками будут считаться «аномальными», поскольку имеют ненормальное распределение признаков и, следовательно, могут быть классифицированы путем задания порогового значения для функции распределения.
[0043] На Фиг. 4 показан алгоритм обнаружения наличия наркотиков в соответствии с одним из вариантов осуществления. В шаге 410 загружают снимок и подготавливают данные, необходимые для анализа (см. Фиг. 5). В шаге 420 высококонтрастные объекты сегментируют для классификации посредством классификатора высококонтрастных объектов (как показано на Фиг. 7). В шаге 430 высококонтрастные объекты удаляют как с исходного, так и с дополнительных изображений. Затем применяется метод скользящих окон. Классификатор 431 выполняет поиск подозрительных участков на изображении (как показано на Фиг. 11), т.е. участков, на которых могут быть обнаружены наркотики. В шаге 440 вычисляют общие признаки для области живота, которые затем классифицируют по факту наличия/отсутствия наркотиков посредством классификатора изображений 441 (как показано на Фиг. 16).
[0044] На Фиг. 5 приведена блок-схема этапа работы алгоритма обработки изображений, на котором загружают снимок для анализа и подготовки данных для дальнейшего выполнения алгоритма. Исходное изображение получают в шаге 520, а затем в шаге 530 обрабатывают его для получения дополнительных изображений (логарифмических и контрастных изображений, а также карт салиентности). Карта салиентности - это изображение, полученное путем преобразования исходя из особенностей человеческого внимания. В частности, известно, что глаз человека фокусируется на различных частях сложного изображения последовательно. Примерный алгоритм использует карту салиентности, сфокусированную на фоне при масштабе 12, 24 и 48 с целью подсветки/выделения контейнеров с наркотиками размером от 10 до 20 пикселей.
[0045] Высокой контрастности изображения достигают путем обработки изображения с целью усиления местного контраста между смежными областями изображения. Собирают местную статистику по минимальным, максимальным и средним значениям по каждому отдельному участку, чтобы впоследствии использовать эти данные для перераспределения плотности пикселей в данных участках. В шаге 540 тело человека разлагают на логарифмическое изображение исходя из фиксированного порогового значения. Данное пороговое значение выбирают на основе большого количества изображений, так что тело почти целиком отделено от фона. В шаге 550 одним из существующих способов определяют местоположение торса (210 на Фиг. 2). Согласно одному из таких методов, определяют максимальную область пересечения строк и колонок, где количество пикселей тела превышает некоторое пороговое значение.
[0046] Согласно другому методу, для нахождения пограничных контуров торса используют заранее построенную двухмерную модель. Затем контур приводят в соответствие с повернутым вертикально прямоугольником. Торс определяется как прямоугольная область, верхний левый угол который расположен по координатам хторс и уторс, а ширина и высота которой обозначены, соответственно, wторс и hторс. Затем в шаге 570 вычисляют местоположение области живота (220 на Фиг. 2) на торсе по формулам:
[0047] xжив=xторс+wторс*kx;
[0048] yжив=yторс+hторс*ky;
[0049] wжив=wторс*kw;
[0050] kжив=kжив*kh;
[0051] где хжив и ужив - координаты верхнего левого угла области живота, а wжив и hжив - ее ширина и высота соответственно. Параметры kx и ky обозначают относительное смещение по отношению к верхнему левому углу торса, a kw и kh обозначают, соответственно, относительную ширину и высоту области живота. Все параметры смещения задают относительно ширины и высоты области торса. Параметры kx, ky, kw и kh устанавливают по большой выборке снимков таким образом, чтобы область живота, определяемая по вышеуказанным формулам, как можно точнее совпадала с областью живота, выделенной экспертом на большинстве снимков. В шаге 580 область живота выводят из исходного и дополнительных изображений для дальнейшего анализа.
[0052] На Фиг. 6 приведена блок-схема построения (или обучения) классификатора для распознавания высококонтрастных объектов. Согласно одному из вариантов осуществления высококонтрастные участки необходимо отмечать с целью их удаления из дальнейшего анализа на наличие наркотиков. После удаления высококонтрастных участков, на изображении области живота останутся только анатомические участки и (в случае их наличия) контейнеры с наркотиками, а также другие низкоконтрастные области. Таким образом, этот этап нужен для того, чтобы упростить процесс обнаружения наркотиков путем сокращения числа неанатомических объектов. Обучение классификатора, показанное на Фиг. 6, проводится на обучающей выборке из снимков.
[0053] В шаге 610 область живота на обучающей подборке изображений сегментируют на подозрительные высококонтрастные участки посредством глобального порога по карте салиентности логарифмического изображения, сфокусированной на фоне при масштабе 12, 24 и 48. Данный порог выбирается таким образом, чтобы высококонтрастные объекты как можно точнее совпадали с объектами, выбранными экспертом. Затем изображения подвергают морфологическому соединению участков элементами квадратной формы (размером 3×3). Такое соединение выравнивает границы объектов и заливает фоновые пиксели внутри объектов. Пример сегментирования изображения на участки показан на Фиг. 8 (810 и 820).
[0054] В шаге 620 производят фильтрацию мелких объектов по минимальному линейному размеру и площади объектов. Фильтрация по размеру устанавливается таким образом, чтобы отфильтровать зоны шума размером, близким к разрешающей способности сканера. Пример сегментированных участков после фильтрации показан на Фиг. 8 (830). В шаге 530 специалист вручную отмечает высококонтрастные объекты. Отмечаются все видимые неанатомические объекты в области живота, чья плотность контраста по сравнению с фоном равна или превышает плотность объекта. Затем в шаге 640 рассчитывают набор геометрических и плотностных признаков, а в шаге 650 выбирают конкретные признаки по маске, определенной сегментированным участком на исходном и дополнительных изображениях. Геометрические признаки включают в себя:
[0055] - относительную вертикальную координату центра участка (см. Фиг. 9) в виде дроби, где в числителе средняя величина ряда чисел всех точек участка в области живота, а в знаменателе - высота области живота;
[0056] - относительную горизонтальную координату центра участка (см. Фиг. 9), получаемую следующим образом: рассчитывают среднее количество колонок точек участка, затем рассчитывают расстояние от вычисленного центра до середины области живота и, наконец, делят полученное расстояние на половину ширины области живота;
[0057] - габариты - размеры участка по вертикали и горизонтали;
[0058] - площадь - количество пикселей внутри сегментированного участка;
[0059] - периметр - количество пикселей, расположенных на границе между участком и фоном;
[0060] - геометрические признаки по М.-K. Ху (Hu, М.-K. (1962), Visual pattern recognition by moment invariants, Information Theory, IRE Transactions on, #8(2), C. 179-187) - т.е. признаки участков, инвариантные по отношению к смещению, масштабированию и вращению;
[0061] - геометрические признаки по Й. Флуссер (Flusser, J., Т. Suk (1993), Pattern recognition by affine moment invariants, Pattern Recognition, #26(1), C. 167-174), инвариантные по отношению к обычным аффинным преобразованиям;
[0062] - геометрические признаки по Л. Гупта (Gupta, L., М. D. Srinath (1987), Contour sequence moments for the classification of closed planar shapes, Pattern recognition, #20(3), C. 267-272);
[0063] - т.е. признаки границ участков, инвариантные к смещению, масштабированию и вращению.
[0064] Плотностные признаки включают в себя:
[0065] - базовые признаки, такие как интегральная, средняя и максимальная величины плотности, градиента и лапласиана;
[0066] - признаки по Р.М. Харалику, описывающие текстуру (Haralick, R.М., K. Shanmugam, I.Н. Dinstein (1973), Textual features for Image Classification, Systems, Man and Cybernetics, IEEE Transactions on, #SMC-3(6), C. 610-621);
[0067] - признаки по Габору, применяемые для описания текстуры в различных масштабах и в различных направлениях (Kumar, A., G.K. Н. Pang (2002), Defect detection in textured materials using Gabor filters, Industry Applications, IEEE Transactions on, #38(2), C. 425-440);
[0068] - признаки по Xy (см. выше), вычисляемые по плотности в данном конкретном участке (а не по двоичному изображению участка).
[0069] Кроме того, данные признаки могут быть возведены в квадрат, куб или более высокие степени. Чем больше выбрано признаком, тем точнее классификация, то только до определенного предела, когда число признаков достигает числа данных, для которых построен классификатор. При дальнейшем увеличении числа признаков наступает эффект перенасыщения, т.е. с обучающей выборкой классификатор будет справляться все лучше, а результаты по анализируемому набору данных будут падать. В шаге 650 заданное число лучших классификационных признаков отбирают из всего набора признаков исходя из отметок, выбранных вручную. Для этого может использоваться метод «последовательного прямого отбора» (англ. Sequential Forward Selection, SFS) в сочетании с критериями Фишера. Затем в шаге 660 подбирают лучшие параметры для классификатора исходя из отобранных признаков. Для построения классификатора в шаге 670 и далее, для классификации высококонтрастных объектов используют только отобранные признаки и лучшие параметры.
[0070] В алгоритме классификации могут быть использованы стандартные методы, такие как, например, метод опорных векторов (англ. support vector machine). Для подбора параметров классификатора могут применять метод скользящего контроля, посредством которого осуществляется перебор различных наборов параметров. Параметры, которые обеспечивают лучшие результаты классификации высококонтрастных объектов, используют для построения классификатора в шаге 670.
[0071] Схема классификации высококонтрастных объектов в области живота на новых изображениях показана на Фиг. 7. В шаге 710 сегментируют участки изображения, содержащие подозрительные высококонтрастные объекты. В шаге 720 данные участки фильтруют по размеру и площади (как описано выше). Выбранные признаки (геометрических и плотностных) используемые для построения классификатора, вычисляют на новом изображении в шаге 740. Важно отметить, что вычисление/расчет производят по исходному и дополнительным изображениям по маске, определяемой сегментированными участками. Рассчитанные признаки затем используют для классификации участков посредством построенного классификатора в шаге 750. Результаты классификации высококонтрастных объектов приведены на Фиг. 12. Классификатор проверяет сегментированные участки на предмет наличия высококонтрастных объектов.
[0072] На Фиг. 10 приведена блок-схема построения классификатора участков. В шаге 1010 из области живота удаляют высококонтрастные объекты. Эксперт в шаге 1020 отмечает участки. Признаки этих участков вычисляют в шаге 1030. В отличие от классификации высококонтрастных объектов, при классификации участков не используют геометрические признаки. Вместо них используют коэффициенты Фурье и косинусных преобразований вместе с местными двоичными паттернами. Наиболее подходящие признаки отбирают в шаге 1040. Затем на основе этих признаков в шаге 1050 подбирают параметры классификатора. Выбранные признаки и лучшие параметры классификатора используют для построения классификатора участков в шаге 1060.
[0073] На Фиг. 11 приведена блок-схема поиска подозрительных участков, на которых могут быть наркотики. Согласно одному из вариантов исполнения поиск подозрительных участков осуществляют с использованием метода скользящих окон, причем заданный размер окна вдвое превышает размер типичного контейнера с наркотиками на изображениях, которые использовались для обучения классификатора. Горизонтальное и вертикальное смещение соседних окон назначают в половину их размера. В шаге 1110 из области живота удаляют все высококонтрастные объекты. В шаге 1120 процесс вычисляет выбранные признаки для участков. В шаге 1130 с помощью построенного классификатора участков получают классы и границы участков.
[0074] Согласно одному из вариантов исполнения классификатор может вычислять, к какому классу (наркотики или фон) принадлежит анализируемый участок. Классификатор также возвращает величину надежности классификации, вычисляемое как граница из точки, описанной признаками участка, по отношению к гиперплоскости, разделяющей классы в пространстве признаков. Например, для двух участков дана величина смещения -0,5 и -1,2 соответственно. Отрицательные значения означают, что данные участки являются подозрительными, т.е. могут содержать наркотики. А для двух других участков величина смещения составляет 0,2 и 0,7 соответственно - они классифицируются классификатором как фон. Полученные таким образом границы используются на заключительном этапе классификации, когда определяется есть ли на изображении целиком наркотики или нет.
[0075] Примеры расположения окон обнаружения показаны на Фиг. 13. Исходное положение 1320 окна - левый верхний угол области живота 1310. Участок в данном окне необходимо проверить на наличие наркотиков. Затем проводят анализ следующего участка 1330. Когда окно обнаружения доходит до правого края области живота 1310, оно опускается на следующий ряд/строку и переходит к левому краю 1340. Таким образом окно обнаружения 1350 проходит через всю область живота 1310. Конечное положение 1360 окна - правый нижний угол области живота 1310.
[0076] Для классификации участков, содержащих наркотики, необходимо обучить соответствующий классификатор. Процесс обучения представлен на Фиг. 10. Данный этап выполняют на основе новой обучающей подборки изображений. Для надежной классификации данные изображения должны отличаться от тех, что были использованы для обучения классификатора высококонтрастных объектов. Первый шаг в построении классификатора участков состоит в подготовке данных для обучающей подборки изображений (см. Фиг. 5) и поиске высококонтрастных объектов, как показано на Фиг. 7. Затем удаляют области, содержащие высококонтрастные объекты. На Фиг. 12 показаны контрастные участки 1210 и 1230 в области живота, а также их карты (1220 и 1240 соответственно), полученные после удаления высококонтрастных объектов. Обработанные участки 1220 и 1240 в дальнейшем используются для анализа и поиска наркотиков.
[0077] В дополнение к ротационно инвариантным периодическим признакам могут быть рассчитаны дополнительные признаки, такие как коэффициенты Фурье или косинусного преобразования. Также могут быть использованы периодические коэффициенты ƒ(i,j), где i и j - индексы строк и столбцов квадратной матрицы коэффициентов размерностью S. Если используются ротационно инвариантные периодические параметры, то одинаковая горизонтальная, вертикальная и диагональная периодичность должны составлять входные параметры одного общего свойства, а не разных коэффициентов, как в случае с коэффициентами Фурье или косинусного преобразования.
[0078] Количество ротационно инвариантных признаков равно длине диагонали матрицы коэффициентов, округленной вверх:
[0079] 
[0080] где ceil() - это функция округления вверх.
[0081] Для того чтобы рассчитать инвариантные признаки для каждого коэффициента, вычисляют расстояние до верхнего левого пикселя матрицы коэффициентов по следующей формуле:

[0082] Затем к двум ротационно инвариантным признакам добавляют коэффициент ƒ(i,j), имеющий определенный вес:
[0083] 

[0084] где ƒR1 - это рассчитанные ротационно инвариантные признаки, a floor() - функция округления к ближайшей более низкой величине.
[0085] Дополнительные признаки, составляющие сумму ротационно инвариантных признаков, можно рассчитать по следующей формуле:
[0086] 
[0087] Совокупное количество данных признаков рассчитывают по следующей формуле:
[0088] 
[0089] Данные признаки используют для того, чтобы объединить коэффициенты со схожей частотностью с целью последующего их использования в классификации, поскольку сумма соседних элементов (а не одиночный компонент инвариантного свойства) может представлять собой значащее свойство. Пример расчета ротационно инвариантных периодических признаков для матрицы коэффициентов размером 2×2 приведен на Фиг. 14. Коэффициенты 1410 включают в ротационно инвариантные коэффициенты 1420 в виде взвешенной суммы, рассчитанной по вышеуказанным формулам. Поскольку значение периодического свойства S=2, то количество таких признаков 3. Первый столбец коэффициентов 1420 содержит индексы инвариантных признаков, а второй столбец - формулу для расчета данных признаков по исходным коэффициентам 1410, где c1 и с2 выступают в качестве факторов для коэффициентов ƒ(i,j) в формулах, приведенных выше.
[0090] Подобным образом для сумм ротационно инвариантных признаков в левой колонке таблицы 1430 содержатся индексы суммированных свойств, а в правой колонке - примеры расчетов компонента суммированного свойства с использованием одиночных инвариантных признаков. Увеличение числа признаков позволяет повысить точность классификации. Для выбора оптимального количества наиболее подходящих признаков из всех рассчитанных признаков применяют, например, метод последовательного прямого отбора.
[0091] На Фиг. 15 приведена блок-схема построения классификатора изображений. В шаге 1510 процесс строит карту пересечений подозрительных участков (т.е. тех, где потенциально могут быть обнаружены наркотики). В шаге 1520 процесс вычисляет признаки по данной карте пересечений. В шаге 1530 процесс вычисляет признаки с граничных значений подозрительных участков. В шаге 1540 происходит отбор наиболее подходящих признаков. В шаге 1550 процесс строит эталонное изображение, на котором наркотиков нет. В шаге 1560 процесс подбирает порог вероятности обнаружения, который будет использоваться для подразделения изображений на те, где наркотики есть, и на те, где наркотиков нет. В шаге 1570 процесс строит функцию преобразования. Надо отметить, что для построения карты пересечений участков используются данные о положении участков 1720 и 1730 (см. Фиг. 17) области живота 1710, в которых возможно наличие наркотиков.
[0092] Все участки одинакового размера. Смещения участков по горизонтали и вертикали вдвое меньше размера участка. Таким образом, каждый участок можно разделить на четыре подучастка, разделив ширину и высоту исходного участка пополам. В случае есть все подучастки подозрительного участка оказываются отмечены, соответственно, каждый из этих подучастков может иметь отметку 0, 1, 2, 3 или 4 (что отражает количество отметок). Например, на Фиг. 17 подучастки 1740 и 1750 отмечены по одному разу, а подучасток 1760 отмечен дважды. Количество подучастков, отмеченных некоторое количество раз, может быть использовано в качестве эффективного критерия (совокупного признака) для отбора изображений, на которых есть/отсутствуют наркотики.
[0093] С помощью карты пересечений можно определить следующие параметры:
[0094] - количество участков, классифицированных как содержащие наркотики;
[0095] - количество подучастков со степенью пересечения 1;
[0096] - количество подучастков со степенью пересечения 2;
[0097] - количество подучастков со степенью пересечения 3;
[0098] - количество подучастков со степенью пересечения 4.
[0099] Для формирования совокупных признаков изображений также может быть использован другой набор данных, а именно граничные значения секущих гиперплоскостей в пространстве признаков. Признаки выделяют в процессе классификации участков области живота. Граничные значения отражают вероятность того, что выбранный участок содержит наркотики. Крупные значения указывают на высокую вероятность наличия наркотиков в данном участке. Из граничных значений могут быть выведены следующие совокупные признаки, которые могут быть использованы для подразделения изображений на те, где наркотики есть, и на те, где наркотиков нет:
[00100] - сумма граничных значений секущей гиперплоскости;
[00101] - средняя величина граничных значений секущей гиперплоскости;
[00102] - стандартная погрешность граничных значений секущей гиперплоскости;
[00103] - первое максимальное абсолютное граничное значение секущей гиперплоскости;
[00104] - второе максимальное абсолютное граничное значение секущей гиперплоскости;
[00105] - третье максимальное абсолютное граничное значение секущей гиперплоскости;
[00106] - четвертое максимальное абсолютное граничное значение секущей гиперплоскости;
[00107] - пятое максимальное абсолютное граничное значение секущей гиперплоскости;
[00108] - сумма пяти максимальных граничных значений секущей гиперплоскости;
[00109] - а также средняя величина пяти максимальных граничных значений секущей гиперплоскости.
[00110] Второй этап обучения классификатора состоит в подборе наиболее подходящих признаков из вышеприведенного списка. Например, признаки, линейно зависимые от других признаков, отбрасываются. В соответствии с одним из вариантов осуществления, на основе отобранных признаков составляют эталонное изображение, не содержащее наркотиков. Данный эталон используют в качестве многомерного нормального распределения с нулевым средним значением для всех выбранных признаков, поскольку большинство изображений, на которых отсутствуют наркотики, будут иметь нулевые значения для указанных признаков. Для построения эталонного изображения используют обучающую подборку изображений, на которых наркотики отсутствуют. Далее вычисляют выбранные признаки (из вышеприведенного списка) и осуществляют построение многомерной нормальной модели (эталона) изображения, на котором наркотики отсутствуют.
[00111] Многомерное нормальное распределение описывается ковариационной матрицей, вычисляемой по следующей формуле:
[00112] 
[00113] где m - количество изображений в обучающей выборке, Х - матрица признаков из m рядов, содержащая отобранные признаки изображений. Полученную ковариационную матрицу применяют в формуле расчета вероятности ƒ(x) того, что изображение будет считаться нормальным (т.е. на нем нет наркотиков):
[00114] 
[00115] где х - ряд совокупных признаков анализируемого снимка. Если полученное значение ƒ(x) стремится к максимуму, считается, что снимок нормален, т.е. на нем нет наркотиков.
[00116] Максимальная величина вероятности определяется по следующей формуле:
[00117] 
[00118] Если вероятность близка к нулю (т.е. ƒ(x)<<ƒmax), значит, в животе человека, снимок которого анализирует система, присутствуют наркотики. Когда построение классификатора закончено, выбирается порог вероятности, используемый для подразделения изображений на те, где наркотики есть, и те, где наркотики отсутствуют. Используется новая обучающая подборка изображений различных типов. Из каждого изображения вычисляют выбранные признаки (из вышеприведенного списка). Данные признаки используют в вышеуказанной формуле расчета вероятности для вычисления степени сходства между данным изображением и изображениями, на которых наркотики отсутствуют. Пороговое значение вероятности ƒε выбирают исходя из анализа значений вероятностей по изображениям, на которых есть/отсутствуют наркотики, чтобы различать их по следующему правилу:
[00119] - при ƒ(x)>ƒε считается, что на изображении наркотики отсутствуют;
[00120] - при ƒ(x)<ƒε или ƒ(x)=ƒε считается, что на изображении есть наркотики.
[00121] Однако пороговое значение ƒε не очень удобно для интерпретации, поскольку на много порядков меньше ƒmax. Как видно из Фиг. 18, распределение изображений по вероятности отсутствия наркотиков не слишком информативно. Таким образом, необходимо произвести нелинейное преобразование функции ƒ(x) в новую функцию р(х), отражающую степень отличия изображения от среднего нормального изображения (т.е. на котором наркотиков нет) при соблюдении следующих условий:
[00122] 
[00123]  ;
;
[00124]  .
.
[00125] Функция степени отличия строится таким образом, чтобы пороговое значение составляло 50%. Правило классификации на основе степени отличия от среднего нормального изображения имеет следующую формулировку:
[00126] - при р(х)<50% считается, что на изображении наркотики отсутствуют;
[00127] - при р(х)>50% или р(х)=50% считается, что на изображении есть наркотики.
[00128] Требуемая функция преобразования может быть записана следующим образом:
[00129] 
[00130] где γ - параметр функции преобразования, вычисляемый по следующему равенству:
[00131] 
[00132] Пример функции преобразования p(ƒ/ƒmax) с параметром γ=0,1 приведен на Фиг. 19. Функция р(х) позволяет с большим удобством подбирать дополнительные пороговые значения для выделения групп снимков с разным количеством содержащихся на них наркотиков (см. Фиг. 20), а также позволяет проанализировать точность алгоритма. Например, группы снимков с большим и малым количеством наркотиков можно определить посредством пороговых значений функции р(х).
[00133] На Фиг. 16 приведена блок-схема классификации изображений на предмет наличия на них наркотиков. В шаге 1610 процесс строит карту пересечений подозрительных участков, т.е. участков, в которых могут быть обнаружены наркотики. Полученная карта пересечений, имеющая некоторую минимальную степень пересечения (например, 2 или 3), может быть использована для визуализации подозрительных областей, где могут быть обнаружены наркотики. В этом случае оператор видит либо область, в которой число пересечений выше или равно заданного порогового значения, либо область увеличивается путем слияния с одним из возможных структурных элементов. Примеры подозрительных участков 320, 330 и 340 с порогом пересечения 2 в области живота 310 изображены на Фиг. 3.
[00134] В шаге 1620 процесс вычисляет признаки полученной карты пересечений. В шаге 1630 процесс вычисляет признаки из граничных значений подозрительных участков, и затем в шаге 1640 по этим признакам классифицирует изображение (снимок). Отобранные признаки, вместе со значением параметров преобразования и ковариационной матрицей, используют для вычисления степени отличия между снимком и средним нормальным изображением (т.е. изображением, не содержащим наркотиков) по указанным выше формулам. Рассчитанную степень отличия, или несхожести, используют для классификации изображения по правилу сравнения с пороговым значением. Если степень несхожести выше или равна пороговому значению, считается, что на изображении обнаружены наркотики. Заданное пороговое значение составляет 50%.
[00135] Таким образом, исходя из описанных вариантов осуществления системы и способа по настоящему изобретения, специалистам должно быть очевидно, что заявленная цель изобретения была достигнута, а именно, что предлагаемый способ обеспечивает эффективное обнаружение наркотиков в животе человека.
[00136] Специалистам очевидно, что в настоящее изобретение могут быть внесены различные модификации и изменения, не выходящие за рамки объема и духа настоящего изобретения. Изобретение подробно определяется прилагаемой формулой.
ЛИТЕРАТУРА
Bishop, С.М. (2006), Pattern Recognition and Machine Learning, Springer. Cortes, С, V. Vapnik (1995), Support-vector networks, Mach Learn, #20(3), C. 273-297. Drouin, S., R. Poulin, L. Perron, D. Gudmundson (2015), US 20150010128 A1: Method and system for identifying a liquid product in luggage or other receptacle.
Duta, N., A. K. Jain, M. P. Dubuisson-Jolly (2001), Automatic construction of 2D shape models, Pattern Analysis and Machine Intelligence, IEEE Transactions on, #23(5), C. 433-446. Flusser, J., T. Suk (1993), Pattern recognition by affine moment invariants, Pattern Recognition, #26(1), C. 167-174.
Gupta, L., M. D. Srinath (1987), Contour sequence moments for the classification of closed planar shapes, Pattern recognition, #20(3), C. 267-272.
Haralick, R. M., K. Shanmugam, I. H. Dinstein (1973), Textual features for Image Classification, Systems, Man and Cybernetics, IEEE Transactions on, #SMC-3(6), C. 610-621. Hu, M.-K. (1962), Visual pattern recognition by moment invariants, Information Theory, IRE Transactions on, #8(2), C. 179-187.
Jain, A. K., R. P. W. Duin, M. Jianchiang (2000), Statistical pattern recognition: a review, Pattern Analysis and Machine Intelligence, IEEE Transactions on, #22(1), C. 4-37. Kumar, A., G. K. H. Pang (2002), Defect detection in textured materials using Gabor filters, Industry Applications, IEEE Transactions on, #38(2), C. 425-440.
Laurikkala, J., M. Juhola, E. Kentala (2000), Informal Identification of Outliers in Medical Data, доклад, представленный на 5-м Международном семинаре по интеллектуальному анализу данных в медицине и фармакологии, Берлин (Германия).
Lehmann, L. A., R. E. Alvarez, A. Macovski, W. R. Brody, N. J. Pelc, S. J. Riederer, A. L. Hall (1981), Generalized image combinations in dual KVP digital radiography, Medical Physics, #8(5), C. 659-667.
Mery, D. (2011), Automated Detection of Welding Discontinuities without Segmentation, Materials Evaluation, C. 657-663.
Mery, D., M. A. Beri (2003), Automatic detection of welding defects using texture features, Insight -Non-Destructive Testing and Condition Monitoring, #45(10), C. 676-681.
Mery, D., R. R. da Silva, L. P. Caloba, J. M. A. Rebello (2003), Pattern recognition in the automatic inspection of aluminium castings, Insight - Non-Destructive Testing and Condition Monitoring, #45(7), C. 475-483.
Montabone, S., A. Soto (2010), Human detection using a mobile platform and novel features derived from a visual saliency mechanism, Image and Vision Computing, #28(3), C. 391-402. Ojala, Т., M. Pietikainen, T. Maenpaa (2002), Multiresolution gray-scale and rotation invariant texture classification with local binary patterns, Pattern Analysis and Machine Intelligence, IEEE Transactions on, #24(7), C. 971-987.
Saisan, P. (2013), US 8437556 B1: Shape-based object detection and localization system.
Sun, Y., X. Wang, L. Wang, Y. Yi, M. Chen (2014), US 8774460 B2: Method of processing body inspection image and body inspection apparatus.
Vaidya, N. M. (2014), US 8774461 B2: Method and system for automatic detection of a class of objects.
Yu, Z., C. Bajaj (2004), A fast and adaptive method for image contrast enhancement, доклад, представленный на Международной конференции по обработке изображений 2004 г., ICIP'04, 24-27 октября 2004 г.
Zuiderveld, K. (1994), Contrast Limited Adaptive Histograph Equalization, в сборнике Graphic Gems IV, edited, C. 474-485, Academic Press Professional, Сан-Диего.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ИНТЕГРИРОВАНИЯ СИСТЕМАТИЧЕСКОГО ПРОРЕЖИВАНИЯ ДАННЫХ В ОСНОВАННЫЙ НА ГЕНЕТИЧЕСКОМ АЛГОРИТМЕ ВЫБОР ПОДМНОЖЕСТВА ПРИЗНАКОВ | 2007 |
|
RU2449365C2 |
| СПОСОБ И СИСТЕМА СТАТИЧЕСКОГО АНАЛИЗА ИСПОЛНЯЕМЫХ ФАЙЛОВ НА ОСНОВЕ ПРЕДИКТИВНЫХ МОДЕЛЕЙ | 2020 |
|
RU2759087C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА ПО ИЗОБРАЖЕНИЮ ЕГО ЛИЦА | 2006 |
|
RU2304307C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛИЦ НА ИЗОБРАЖЕНИИ С ПРИМЕНЕНИЕМ КАСКАДА КЛАССИФИКАТОРОВ | 2010 |
|
RU2427911C1 |
| СПОСОБ ДЛЯ АВТОМАТИЗИРОВАННОЙ РЕГИСТРАЦИИ В РЕАЛЬНОМ ВРЕМЕНИИ МОРСКИХ МЛЕКОПИТАЮЩИХ | 2012 |
|
RU2546548C1 |
| Идентификация или определение груза на основе текстуры | 2015 |
|
RU2717913C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ ЛИЦА С УЧЕТОМ СПИСКА ЛЮДЕЙ, НЕ ПОДЛЕЖАЩИХ ПРОВЕРКЕ | 2008 |
|
RU2381553C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПОИСКА ЭТАЛОННЫХ ПЕЧАТЕЙ | 2013 |
|
RU2556461C2 |
| СПОСОБЫ ВЫБОРА ПРИЗНАКОВ, ИСПОЛЬЗУЮЩИЕ ОСНОВАННЫЕ НА ГРУППЕ КЛАССИФИКАТОРОВ ГЕНЕТИЧЕСКИЕ АЛГОРИТМЫ | 2007 |
|
RU2477524C2 |
| Устранение ложных срабатываний антивирусных записей | 2016 |
|
RU2625053C1 |



















Использование: для обнаружения запрещенных веществ. Сущность изобретения заключается в том, что при автоматическом обнаружении проглоченных капсул на изображениях, получаемых посредством рентгеновского сканера, осуществляют следующие шаги: получают исходное изображение человека, проходящего через сканер; формируют дополнительные изображения на основе исходного изображения путем преобразования исходного изображения; определяют положение торса на исходном изображении; вычисляют местонахождение области живота на торсе как на исходном, так и на дополнительных изображениях; классифицируют сегменты области живота на исходном изображении; вычисляют геометрические и плотностные признаки, а также ротационно инвариантные периодические признаки для участков в области живота; обнаруживают подозрительные участки в области живота; вычисляют совокупные признаки свойств подозрительных участков; используют эталонные изображения, на которых отсутствуют проглоченные капсулы, для классификации исходного изображения посредством порогового значения функции несхожести; сообщают пользователю, что на исходном изображении есть проглоченные капсулы, в случае если значение функции несхожести от совокупных признаков исходного изображения выше или равно заданному пороговому значению. Технический результат: обеспечение возможности получения более быстрого результата по сравнению с визуальным анализом, выполняемым человеком (оператором), а также обеспечение стабильного уровня точности обнаружения. 3 н. и 21 з.п. ф-лы, 20 ил.
1. Способ автоматического обнаружения проглоченных капсул на изображениях, получаемых посредством рентгеновского сканера, включающий в себя следующие шаги:
- получают исходное изображение человека, проходящего через сканер;
- формируют дополнительные изображения на основе исходного изображения путем преобразования исходного изображения;
- определяют положение торса на исходном изображении;
- вычисляют местонахождение области живота на торсе как на исходном, так и на дополнительных изображениях;
- классифицируют сегменты области живота на исходном изображении;
- вычисляют геометрические и плотностные признаки, а также ротационно инвариантные периодические признаки для участков в области живота;
- обнаруживают подозрительные участки в области живота;
- вычисляют совокупные признаки свойств подозрительных участков;
- используют эталонные изображения, на которых отсутствуют проглоченные капсулы, для классификации исходного изображения посредством порогового значения функции несхожести;
- а также сообщают пользователю, что на исходном изображении есть проглоченные капсулы, в случае если значение функции несхожести от совокупных признаков исходного изображения выше или равно заданному пороговому значению.
2. Способ по п. 1, отличающийся тем, что для вычисления ротационно инвариантных признаков используют периодические признаки, причем одинаковая горизонтальная, вертикальная и диагональная периодичность составляют входные параметры одного общего свойства.
3. Способ по п. 1, дополнительно включающий сегментирование области живота перед вычислением геометрических и плотностных признаков, а также ротационно инвариантных периодических признаков для участков в области живота.
4. Способ по п. 1, дополнительно включающий следующие шаги:
- строят карту пересечений подозрительных участков, на которых возможно присутствие проглоченных капсул;
- а также вычисляют совокупные признаки данной карты пересечений участков.
5. Способ по п. 1, отличающийся тем, что дополнительные изображения, формируемые на основе исходного изображения, представляют собой либо логарифмические изображения, либо контрастные изображения, либо карты салиентности.
6. Способ по п. 1, отличающийся тем, что совокупные признаки получают исходя из пограничных величин, служащих для различения изображений, на которых есть проглоченные капсулы, и изображений, на которых они отсутствуют.
7. Способ по п. 6, отличающийся тем, что совокупные признаки для области живота включают в себя, например, сумму граничных значений секущей гиперплоскости, среднюю величину граничных значений секущей гиперплоскости или стандартную погрешность граничных значений секущей гиперплоскости.
8. Способ по п. 6, отличающийся тем, что совокупные признаки для области живота включают в себя, например: первое максимальное абсолютное граничное значение секущей гиперплоскости, второе максимальное абсолютное граничное значение секущей гиперплоскости, третье максимальное абсолютное граничное значение секущей гиперплоскости, четвертое максимальное абсолютное граничное значение секущей гиперплоскости, пятое максимальное абсолютное граничное значение секущей гиперплоскости, сумму пяти максимальных граничных значений секущей гиперплоскости или среднюю величину пяти максимальных граничных значений секущей гиперплоскости.
9. Способ по п. 1, отличающийся тем, что эталонные изображения, на которых отсутствуют проглоченные капсулы, представляют собой многомерное эталонное изображение, построенное на основе многомерного нормального распределения, описываемого ковариационной матрицей обучающей выборки.
10. Способ по п. 1, дополнительно включающий вычисление геометрических признаков сегментов, таких как:
- относительная вертикальная координата центра сегмента в виде дроби, где в числителе средняя величина ряда чисел всех точек сегмента в области живота, а в знаменателе - высота области живота;
- относительная горизонтальная координата центра сегмента в виде расстояния от вычисленного центра сегмента до середины области живота, разделенной пополам по ширине;
- длина сегмента по горизонтали и по вертикали;
- количество пикселей внутри сегмента;
- или количество пикселей на границе между сегментом и фоном.
11. Способ по п. 1, отличающийся тем, что геометрические признаки включают в себя, например, геометрические признаки, инвариантные по отношению к смещению, масштабированию и вращению, геометрические признаки, инвариантные по отношению к обычным аффинным преобразованиям, или геометрические признаки граничных значений сегментов/областей, инвариантные к перемещению, масштабированию и вращению.
12. Способ по п. 1, дополнительно включающий вычисление плотностных признаков, таких как интегральная, средняя и максимальная величины плотности, градиента и лапласиана, признаки текстуры изображения или признаки, применяемые для описания текстуры в различных масштабах и в различных направлениях.
13. Способ по п. 1, отличающийся тем, что для построения классификатора применяется сумма выбранных ротационно инвариантных периодических признаков.
14. Способ по п. 1, в котором размерность обучающей выборки дополнительно уменьшают посредством одного из современных методов отбора признаков.
15. Способ по п. 1, дополнительно включающий формирование эталонных изображений, на которых отсутствуют проглоченные капсулы, на основе обучающей выборки.
16. Способ по п. 1, дополнительно включающий построение классификатора на основе геометрических и плотностных признаков, а также ротационно инвариантных периодических признаков изображений.
17. Способ по п. 1, дополнительно включающий сообщение пользователю, что на исходном изображении проглоченные капсулы отсутствуют, в случае если значение функции несхожести от совокупных признаков данного исходного изображения ниже заданного порогового значения.
18. Способ по п. 1, отличающийся тем, что для создания большого набора признаков изображений для анализа формируют дополнительные изображения.
19. Способ по п. 1, дополнительно включающий удаление высококонтрастных объектов на изображении области живота.
20. Способ по п. 1, дополнительно включающий подбор параметров для классификатора участков на основе признаков участков, получаемых из множества изображений в обучающей выборке, а также построение классификатора участков на основе выбранных параметров.
21. Способ по п. 1, дополнительно включающий вычисление пограничных значений подозрительных участков после седьмого шага.
22. Способ по п. 1, дополнительно включающий удаление высококонтрастных объектов в области живота как на исходном, так и на дополнительном изображениях после пятого шага.
23. Система автоматического обнаружения проглоченных капсул на изображениях, получаемых посредством рентгеновского сканера, включающая в себя: рентгеновский сканер, модуль обработки, подключенный к рентгеновскому сканеру и выполненный с возможностью принимать и обрабатывать изображения, получаемые посредством рентгеновского сканера, монитор, подключенный к модулю обработки и выполненный с возможностью отображать изображения оператору, где модуль обработки выполняет следующие функции:
- определяет местонахождение области живота на изображении;
- классифицирует сегменты области живота на исходном изображении, разделяя их на высококонтрастные изображения и фон;
- удаляет высококонтрастные объекты в области живота на исходном изображении;
- вычисляет геометрические и плотностные признаки, а также ротационно инвариантные периодические признаки для участков в области живота;
- обнаруживает подозрительные участки в области живота;
- вычисляет пограничные величины и совокупные признаки граничных значений подозрительных участков;
- классифицирует изображение исходя из порогового значения функции несхожести, задаваемого по совокупным признакам изображения, с целью обнаружения изображений, на которых есть проглоченные капсулы;
- а также информирует оператора в случае обнаружения в области живота проглоченных капсул.
24. Способ автоматического обнаружения проглоченных капсул на изображениях, получаемых посредством рентгеновского сканера, включающий в себя следующие шаги:
- получают исходное изображение человека, проходящего через сканер;
- формируют дополнительные изображения путем преобразования исходного изображения;
- определяют местонахождение области живота как на исходном, так и на дополнительных изображениях;
- классифицируют сегменты области живота на исходном изображении;
- вычисляют геометрические и плотностные признаки, а также ротационно инвариантные периодические признаки для участков в области живота;
- обнаруживают подозрительные участки в области живота;
- вычисляют совокупные признаки свойств подозрительных участков;
- используют эталонные изображения, на которых отсутствуют проглоченные капсулы, для классификации исходного изображения посредством порогового значения функции несхожести;
- а также сообщают пользователю, что на исходном изображении есть проглоченные капсулы, исходя из результата предыдущего шага.
| Способ подготовки ленточных проводов к монтажу | 1985 |
|
SU1297149A1 |
| CN 101034071 A, 12.09.2007 | |||
| WO 2012119216 A1, 13.09.2012 | |||
| US 2013136231 A1, 30.05.2013 | |||
| WO 2014031020 A1, 27.02.2014 | |||
| СПОСОБ РЕНТГЕНОВСКОГО КОНТРОЛЯ ТЕЛА ЧЕЛОВЕКА | 2010 |
|
RU2424535C1 |

