ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к роторно-лопастным машинам преобразующим тепловую энергию топлива в электрическую энергию
УРОВЕНЬ ТЕХНИКИ
[0002] Идея роторно-лопастной машины (РЛМ) известна давно и постоянно привлекает внимание из-за ряда преимуществ перед машинами с возвратно-поступательным движением поршней.
Роторно-лопастная машина проще, в ней значительно меньше деталей, силы давления газов в рабочем ходе развивают момент при постоянном плече не зависящем от времени, в ней легко свести к нулю силы изгибающие валы.
[0003] Кроме того, есть основания утверждать, что в ней лучше соблюдаются условия для полного сгорания топлива, что делает ее более экологически чистой в сравнении с обычными поршневыми конструкциями.
Согласно принципу Ле Шателье - Брауна, реакция горения топлива в замкнутом объеме, которая идет с выделением тепла и повышением давления стимулируется при увеличении объема, так как при увеличении объема давление падает. Скорость увеличения объема камеры сгорания в начальных стадиях рабочего хода РЛМ больше, чем в обычной поршневой машине. Это внушает уверенность в том, что сгорание горючего в роторно-лопастной машине будет более полным, и она будет приносить меньше вреда окружающей природе.
[0004] Многими авторами были предприняты попытки построить такую машину, имеется большое количество патентов на различные варианты конструкций, но к настоящему времени ни одна из многочисленных конструкций не дошла до стадии успешного испытания.
[0005] В РЛМ для осуществления термических циклов необходимо обеспечить согласованное изменение угловых скоростей вращения валов и основная причина неудач состоит в том, что все известные варианты механизмов согласования представляли собой разнообразные варианты механической связи валов между собой и с неподвижной частью машины. Все они не были достаточно надежными, способными к длительной работе. Детали этих устройств испытывали знакопеременные ударные нагрузки, что быстро приводило к их разрушению.
[0006] Известны изобретения, например, патент RU 2237817, в котором предлагается установить на валы роторно-лопастной машины обратимые электрические машины (ОЭМ), но для удержания задней лопасти от вращения в обратном направлении предусматривается использовать стопорное устройство или храповик, что делает устройство практически неработоспособным.
Известны другие конструкции, например, WO 2008/081212 А1, где на валах роторно-лопастной машины установлены электрические машины, и используются механические стопорные устройства для предотвращения вращения ротора в одном из направлений, то есть, с тем же недостатком, что и в предыдущем примере.
ЗАДАЧА ИЗОБРЕТЕНИЯ
[0007] Технической задачей является нахождение простого и надежного способа согласования вращения валов, без применения каких-либо механических связей влияющих на характер вращения валов роторно-лопастной машины.
РЕШЕНИЕ ЗАДАЧИ
[0008] Предлагаемый способ согласования угловых скоростей валов роторно-лопастной машины заключается в установке ОЭМ на один из валов, или в установке ОЭМ на оба вала. В обоих случаях работа одной или двух ОЭМ контролируется электронным коммутатором, который находится под управлением компьютерного устройства получающего информацию о текущем положении валов от датчиков угловоых координат валов. Необходимый характер согласованного вращения валов достигаются приложением ускоряющих и тормозящих моментов к валам со стороны одной или двух ОЭМ, при этом валы не имеют никаких механических связей ни между собой, ни с неподвижными частями конструкции.
ПРЕИМУЩЕСТВА ПРЕДЛАГАЕМОГО СПОСОБА
[0009] Предлагаемый способ согласования угловых скоростей валов РЛМ является радикальным решением проблемы надежности этого устройства. Кроме того, применение ОЭМ обеспечивает получение всей продуцируемой энергии машины в виде электрической энергии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
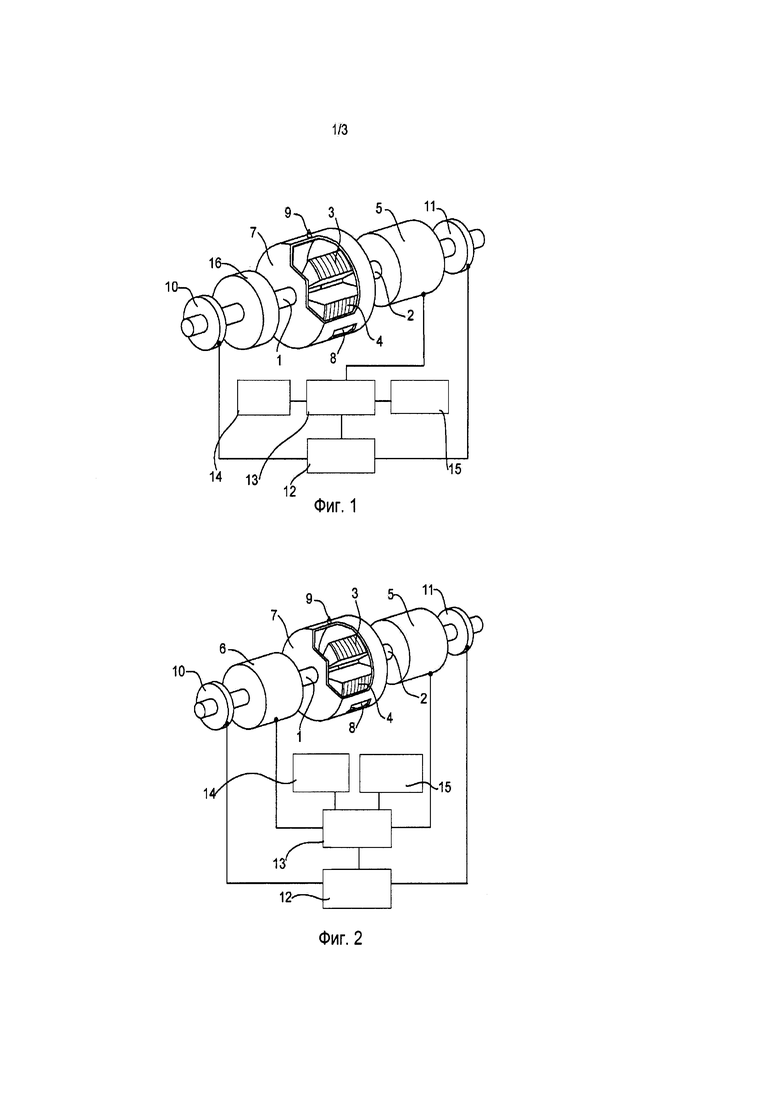
[0010] На фиг. 1 показано устройство с одной ОЭМ на одном из валов, где следующими позициями обозначены:
1 - вал 1
2 - вал 2
3 - одна из лопастей на валу 1
4 - одна из лопастей на валу 2
5 - ОЭМ
7 - цилиндрическая оболочка
8 - oin (отверстие всасывания); оех (отверстие выхлопа) на другой стороне оболочки не показано
9 - устройство поджига (свеча зажигания или инжектор впрыска топлива)
10 - датчик положения вала 1
11 - датчик положения вала 2
12 - компьютерное устройство
13 - электронный коммутатор
14 - аккумулятор
15 - электрическая нагрузка.
16 - маховик
[0011] На фиг. 2 показано устройство с ОЭМ, установленными на оба вала, где следующими позициями обозначены:
1 - вал 1
2 - вал 2
3 - одна из лопастей на валу 1
4 - одна из лопастей на валу 2
5 - ОЭМ
6 - ОЭМ
7 - цилиндрическая оболочка
8 - oin (отверстие всасывания); оех (отверстие выхлопа) на другой стороне оболочки не показано
9 - устройство поджига (свеча зажигания или инжектор впрыска топлива)
10 - датчик положения вала 1
11 - датчик положения вала 2
12 - компьютерное устройство
13 - электронный коммутатор
14 - аккумулятор
15 - электрическая нагрузка.
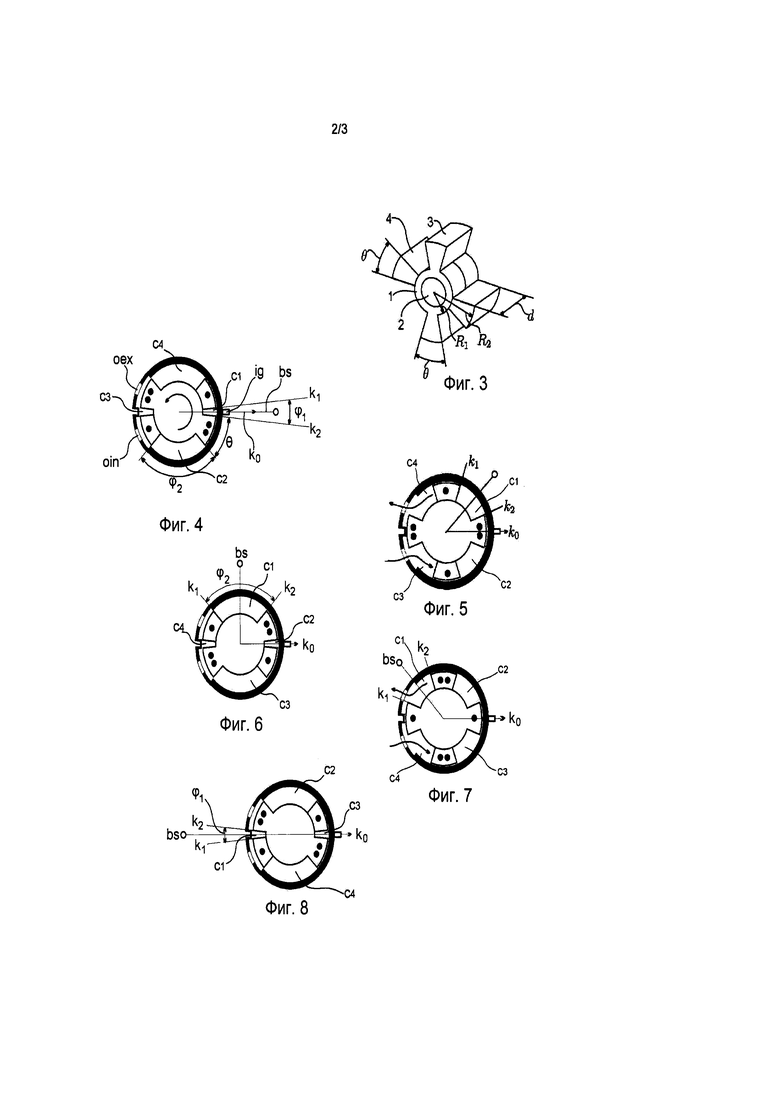
[0012] На фиг. 3 показано простейшее устройство главного узла РЛМ с двумя лопастями на каждом из валов, где: θ - угловой размер лопасти; d - ширина лопасти, R1 - радиус вала, R2 - радиус лопасти,
1 - вал 1
2 - вал 2
3 - одна из лопастей на валу 1
4 - одна из лопастей на валу 2
[0013] На фиг. 4 показано положение лопастей в начале первого такта, где: оех, oin - отверстия выхлопа и всасывания; ig - устройство зажигания; с1, с2, с3, с4 - камеры между лопастями; k0 - начало отсчета координат; k1, k2 - координаты вала 1 и вала 2; bs - биссектриса угла между валами; ϕ1, ϕ2 - угловые размеры камер.
Лопасти вала 1 помечены одной меткой, лопасти вала 2 помечены парой меток
[0014] фиг. 5 - промежуточное положение лопастей в процессе первого такта, где в камере с1 происходит такт рабочего хода, в камере с2 - такт сжатия, в камере с3 - такт всасывания, в камере с4 такт выхлопа
[0015] фиг. 6 - положение лопастей в конце первого такта, что то же самое, что положение в начале второго такта
[0016] фиг. 7 - промежуточное положение лопастей в процессе второго такта, где в камере с2 происходит такт рабочего хода, в камере с3 - такт сжатия, в камере с4 - такт всасывания, в камере с1 - такт выхлопа
[0017] фиг. 8 - положение лопастей в конце второго такта.
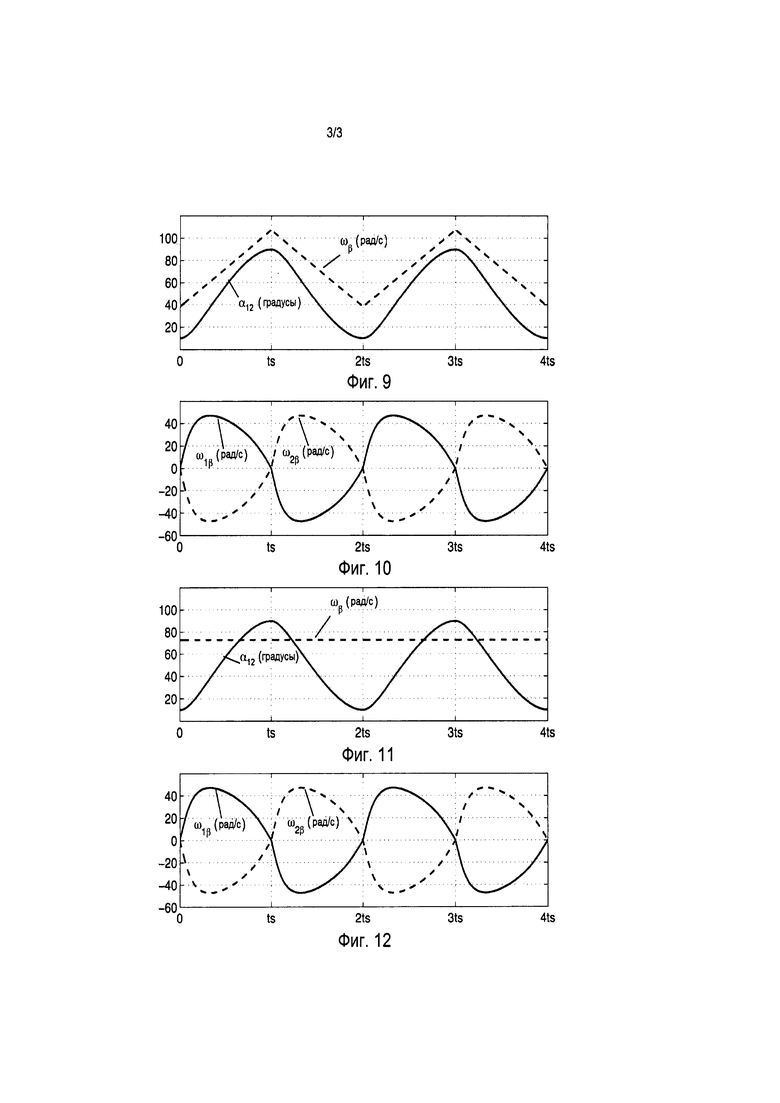
[0018] фиг. 9 - показана зависимость угловой скорости биссектрисы (рад/с, пунктирная линия) и зависимость угла между валами (град, сплошная линия) от времени для варианта с одной ОЭМ
[0019] фиг. 10 - показана зависимость скорости вала 1 относительно биссектрисы (рад/с, сплошная линия) и зависимость скорости вала 2 относительно биссектрисы (рад/с, пунктирная линия) от времени для варианта с одной ОЭМ.
[0020] фиг. 11 - показана зависимость угловой скорости биссектрисы (рад/с, пунктирная линия) и зависимость угла между валами (град, сплошная линия) от времени для варианта с двумя ОЭМ
[0021] фиг. 12 - показана зависимость скорости вала 1 относительно биссектрисы (рад/с, сплошная линия) и зависимость скорости вала 2 относительно биссектрисы (рад/с, пунктирная линия) от времени для варианта с двумя ОЭМ.
РЕАЛИЗАЦИЯ ИЗОБРЕТЕНИЯ
[0022] Устройство роторно-лопастной машины в общих чертах показано на фиг. 1 и фиг. 2, где на первом и втором валах закреплены по две лопасти таким образом, что лопасти первого вала чередуются с лопастями второго вала. При изменении угла между валами изменяются объемы камер между лопастями. На фиг. 1 показана РЛМ с ОЭМ установленной на вал 2 и маховиком на валу 1. На фиг. 2 показана РЛМ с двумя ОЭМ установленными на обоих валах.
[0023] Лопасти заключены в цилиндрическую полость 7 которая имеет отверстие всасывания горючей смеси 8 и отверстие выхлопа (не видно) на другой стороне полости. В боковой стенке полости имеется также устройство зажигания 9, которым может быть свеча зажигания или инжектор впрыскивающий порцию горючего в разогретый воздух, имеющий температуру достаточную для воспламенения горючего. На валах установлены датчики положения валов 10 и 11, которые посылают информацию о положении валов компьютерному устройству 12. Токи ОЭМ контролируются электронным коммутатором 13, который находится под управлением компьютерного устройства. Статоры ОЭМ и цилиндрическая полость закреплены к общему неподвижному основанию. Аккумулятор 14 служит буфером для временного хранения электрической энергии питающей ОЭМ и для обеспечения непрерывного потока электроэнергии в электрическую нагрузку 15.
Электрическая нагрузка потребляет всю электроэнергию выделяемую устройством в стационарном режиме работы.
[0024] фиг. 3 показывает пример простейшего устройства основного узла РЛМ содержащего четыре идентичных лопасти попарно закрепленных к двум валам. θ - это угловой размер лопасти, d - ширина лопасти, R1 - радиус вала, и R2 - радиус лопастей.
[0025] фиг. 4, 5, 6, 7 и 8 показывают пять последовательных положений лопастей в течение двух тактов. Они иллюстрируют характер согласованного вращения лопастей в течение тактов двигателя внутреннего сгорания. Лопасти образуют между собой ограниченные пространства - камеры изменяющегося объема: с1, с2, с3, и с4. Начало отсчета угловых координат валов - это горизонтальный луч направленный вправо и обозначенный k0. Координата первого вала k1, измеряется углом между k0 и поверхностью лопасти этого вала ограничивающей камеру с1. Аналогично, координата второго вала k2, измеряется углом между k0 и поверхностью лопасти этого вала ограничивающей камеру с1.
[0026] На фиг. 4 координата первого вала k1 в начале первого такта положительна, т.к. кратчайший поворот от k0 до k1 идет против часовой стрелки, тогда как координата второго вала в начале первого такта k2 является величиной отрицательной. Такой выбор указания координат валов удобен тем, что разность координат валов (k1-k2) дает угловой размер камеры с1. Луч исходящий из центра вращения, заканчивающийся кружком и обозначенный буквами bs - это биссектриса угла между валами. Координата биссектрисы равна полусумме координат валов: (k1+k2)/2. Координата устройства зажигания постоянна и равна нулю. Отверстия всасывания и выхлопа обозначены oin и оех соответственно.
[0027] В течение первого такта, с момента воспламенения рабочей смеси в камере с1, эта камера расширяется, в ней происходит такт рабочего хода, объем камеры с2 уменьшается, в ней происходит такт сжатия, объем камеры с3 увеличивается, в ней происходит такт всасывания и объем камеры с4 уменьшается, в ней происходит такт выхлопа. Более коротко, в течение первого такта, с1 - камера рабочего хода, с2 - камера сжатия, с3 - камера всасывания и с4 - камера выхлопа. Условимся считать вал на котором установлена лопасть идущая первой в камере с1 ведущим, а другой вал задним. В первом такте вал 1 ведущий, а вал 2 задний.
[0028] Пройдя промежуточное положение изображенное на фиг. 5, к окончанию первого такта лопасти приходят в положение изображенное на фиг. 6, из которого видно, что угловой размер камеры с1 увеличился от ϕ1 до ϕ2, вал 1 повернулся на угол θ+ϕ2, вал 2 повернулся на угол θ+ϕ1, и биссектриса bs угла между валами повернулась на 90°.
[0029] Свежая порция горючей смеси сейчас сжата в камере с2. При воспламенении этой смеси начинается второй такт. В течение второго такта с2 - камера рабочего хода, с3 - камера сжатия, с4 - камера всасывания и с1 - камера выхлопа.
[0030] Подобно происходящему в первом такте, в течение второго такта лопасти проходят промежуточное положение показанное на фиг. 7 и к концу второго такта принимают положение показанное на фиг. 8, при этом в камере с1 закончился выхлоп, а в камерах с2, с3 и с4 закончились соответственно такты рабочего хода, сжатия и всасывания. Во втором такте угловой размер камеры с1 уменьшился до ϕ1, вал 1 повернулся на угол θ+ϕ1, вал 2 повернулся на угол θ+ϕ2, и биссектриса bs угла между валами повернулась на 90°. В этом такте вал 1 был задним, а вал 2 ведущим. Поскольку положение валов в конце второго такта идентично их положению в начале первого, периодом работы устройства будем считать длительность двух последовательных тактов.
[0031] Для того, чтобы происходили описанные выше изменения угловых размеров камер и изменения их положений относительно окон необходимо, чтобы вращение валов было определенным образом согласованы. Ниже представлены некоторые соображения лежащие в основе предлагаемого способа достижения необходимого согласования с применением ОЭМ, допустив для простоты, что моменты инерции валов равны.
[0032] Допустим, что давления газов в камерах с1, с2, с3 и с4 равны р1, р2, р3 и р4 соответственно.
Тогда моменты т1 и т2 действующие на вал 1 и вал 2 равны:


где площадь лопасти S=d(R2-R1) и плечо силы давления на лопасть L=(R1+R2)/2, см. фиг. 3.
[0033] Отсюда видно, что моменты, с которыми газы действуют на валы, всегда равны по величине и противоположны по направлению. Это значит, что ускорение сообщаемое одному валу, равно и противоположно ускорению другого. Следовательно, биссектриса угла между валами не может приобрести ускорения за счет сил давления газов на лопасти. Только внешние моменты (в нашем случае моменты приложенные к валам со стороны ОЭМ), сумма которых не равна нулю могут сообщить ускорение биссектрисе угла между валами.
[0034] Предположим, что в положении показанном на фиг. 4 скорость вращения обоих валов и биссектрисы равна нулю, происходит воспламенение сжатой смеси в камере с1 и со стороны ОЭМ к валам прикладываются моменты. К валу 1 прикладывается момент -т0 в направлении по часовой стрелке, к валу 2 прикладывается момент т0 в направлении против часовой стрелки.
Допустим также, что в остальных трех камерах давление газов равно атмосферному.
[0035] Из этого неустойчивого состояния система придет к негармоническим колебаниям.
Подобно пружинному маятнику в ней начнется процесс перехода внутренней энергии газов в кинетическую энергию валов и затем процесс противоположного направления. Период этих колебаний зависит от начального давления газов, упругих свойств газов, моментов инерции валов и величин приложенных моментов. В процессе этих колебаний координата биссектрисы будет оставаться неподвижной.
[0036] Если в начальный момент угловая скорость биссектрисы будет равной некоторому значению ω0 отличному от нуля, валы будут совершать те же самые колебания относительно вращающейся биссектрисы. Движение валов будет представлять сумму двух независимых движений: колебаний валов относительно биссектрисы и равномерное вращение биссектрисы. Величина ω0 может быть такой, что за то время, пока угловой размер камеры с1 увеличится от ϕ1 до ϕ2, биссектриса совершит поворот на 90° и валы окажутся в положении показанном на фиг. 6, которое представляет конец первого такта. К этому моменту вместо камеры с1 теперь камера с2 содержит сжатую смесь готовую к воспламенению, то есть система готова для совершения второго такта.
[0037] Лопасти РЛМ с упругими газами между ними образуют колебательную систему. Это свойство использовано в предлагаемом способе и устройстве, в которых ОЭМ влияют на период и амплитуду колебаний системы и также на угол поворота биссектрисы в течение тактов.
[0038] В режиме стационарной работы РЛМ процессы происходящие в течение периода должны быть повторением происходящих в предыдущем периоде; к концу каждого периода скорости валов должны быть теми же, какими они были в начале. Если в течение периода газы за счет своей внутренней энергии произвели работу над лопастями, то эквивалентное, количество работы должно быть произведено валами против моментов ОЭМ. Это означает, что в течение периода сумма работ совершенных газами и внешними моментами должна быть равной нулю, только в этом случае валы не будут ни накапливать, ни терять своей кинетической энергии, то есть не будут ускорять или замедлять свою среднюю за период скорость вращения. Биссектриса угла между валами должна в течение каждого такта совершать поворот на 90° и угол между валами должен изменяться либо от ϕ1 до ϕ2, либо от ϕ2 до ϕ1.
[0039] В примерах ниже будет показано, как эти условия выполняются в РЛМ с одной ОЭМ и с двумя ОЭМ в которых приняты следующие допущения:
- энергии тепловых потерь и потерь на трение пренебрежимо малы,
- процессы сжатия и расширения газов являются политропными,
- работы всасывания и выхлопа пренебрежимо малы,
- моменты развиваемые ОЭМ в течение такта постоянны.
[0040] Числовые значения параметров главного узла РЛМ с двумя лопастями на каждом из валов (см. фиг. 3) приняты следующими:
- радиус валов R1=41.5 мм,
- радиус лопастей R2=124.6 мм,
- ширина лопастей d=83.1 мм,
- угловой размер лопастей θ=40°, и следовательно,
- сумма угловых размеров двух смежных камер ssa=180°-2⋅θ=100° и
- моменты инерции вала 1 и вала 2, J1=J2=0.215 кг⋅м2.
[0041] В расчетах приняты следующие обозначения и числовые значения:
- степень сжатия CR=9,
- сумма объемов двух смежных камер Va=1 Л,
- индекс политропы сжатия nC=1.3,
- индекс политропы расширения, nE=1.3,
- повышение температуры при сгорании стехиометрической смеси ΔТ=2000 К,
- начальная температура сжатия Т2=300 К,
- начальное давление сжатия Р2=100 кПа
[0042] Используя данные выше, вычисляем:
- угловой размер камеры после сжатия ϕ1=10°,
- угловой размер камеры до сжатия ϕ2=90°,
- объем камеры перед началом сжатия V2=0.9 Л,.
- объем камеры в конце сжатия V1=0.1 Л,
- работа газа с начальным давлением Р2 при его сжатии от объема V2 до объема V1 равна:

- в результате сжатия, давление газа повысится до P1:

- и температура повысится до T1:

- при сгорании сжатой смеси температура в камере сгорания станет TF

- и давления в ней возрастет до PF:

- работа расширения газа с начальным давлением PF от объема V1 до объема V2 равна:

- общее количество работы газов в процессах сжатия и расширения равно:

ПРИМЕР 1
[0043] Пример 1 описывает режим стационарной работы РЛМ с установленной ОЭМ на один из валов, см. фиг. 1. Режим работы ОЭМ "мотор" или "генератор" переключается коммутатором. Когда ОЭМ, установленная на валу 2, работает как мотор, она потребляет электроэнергию и увеличивает скорость вращения вала 2; работая генератором, она тормозит его вращение и электроэнергию генерирует.
[0044] Как было сказано выше [0038], за время периода энергия валов не должна изменяться, что будет выполняться, если сумма работ газов и внешних моментов совершенных в течение периода будет равной нулю. Работа газов за период равна 2WT.
В течение первого такта ОЭМ прикладывает ускоряющий момент т0 к валу 2 который увеличивает энергию валов и выполняет работу равную т0(θ+ϕ1). В течение второго такта ОЭМ прикладывает к валу 2 тормозящий момент -т0, и выполняет работу -т0(θ+ϕ2). Работа внешних моментов за период (за два такта) равна:

Из условия равенства нулю суммы работ газов и внешних моментов за период

находим величину момента т0:

[0045] При условии, что момент т0 найденной величины приложен к валу 2 и что начальные скорости валов и биссектрисы угла между ними равны нулю, методом итераций находим время tS, в течение которого разогретые газы расширяются от объема V1 до V2, то есть, находим время такта, которое оказывается равным 21.53⋅10-3 с. За это время биссектриса совершит поворот на угол β:


Используя найденое значение, вычисляем то значение начальной скорости биссектрисы ω0, при которой угол поворота в течении такта будет равным 90°:

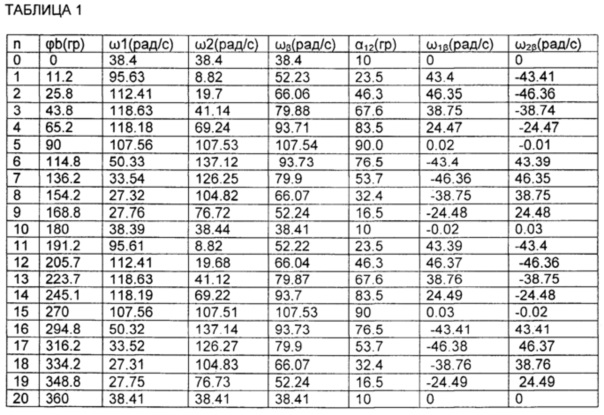
[0046] Сделанные вычисления позволяют дать описание стационарного режима работы РЛМ с одной ОЭМ. С помощью метода итераций было рассчитано вращение валов РЛМ при найденных численных значениях начальной скорости ω0 и момента т0. На фиг. 9 дана зависимость скорости биссектрисы ωβ (рад/с, пунктирная линия) и зависимость угла между валами α12 (град, сплошная линия) от времени в течение четырех тактов. фиг. 10 дает зависимость скорости вала 1 относительно биссектрисы ω1β (рад/с, сплошная линия) и зависимость скорости вала 2 относительно биссектрисы ω2β (рад/с, пунктирная линия). ТАБЛИЦА 1 дает числовые значения координат биссектрисы ϕb, скоростей валов ω1, ω2 и функций представленных на фиг. 9 и фиг. 10 в интервале времени четырех тактов, который разбит на двадцать равных частей.
Из этой таблицы видно, что когда координата биссектрисы угла между валами ϕb принимает значения 90°, 180°, 270° и 360°, угол между валами α12 становится равным 90°, 10°, 90° и 10° соответственно, что подтверждает согласованное друг с другом вращение валов и их правильное вращение относительно цилиндрической полости.
[0047] Кратко об основных параметрах РЛМ с одной ОЭМ:
- Мощность отдаваемая в нагрузку: 45 кВт (61 л.с.) при 697 об/мин,
- Литраж: 3.2 л,
- Мощность ОЭМ: 101 кВт.
ПРИМЕР 2
[0048] Пример 2 описывает режим стационарной работы РЛМ с ОЭМ установленными на обоих валах, см. фиг. 2. Режим работы обеих ОЭМ "мотор" или "генератор" переключается коммутатором. Когда ОЭМ работает как мотор, она потребляет электроэнергию и увеличивает скорость вращения своего вала; работая генератором, она тормозитт его вращение и электроэнергию генерирует.
[0049] В этом примере используются числовые характеристики из параграфов [0040] и [0041], и также результаты вычислений в параграфе [0042].
[0050] В первом такте ОЭМ на валу 2 (задний вал), прилагает к нему ускоряющий момент т0 и производит работу т0(θ+ϕ1), в то время как ОЭМ на валу 1 (ведущий вал) прикладывает к нему тормозящий момент -т0 и производит работу -т0(θ+ϕ2). Работа выполненная двумя ОЭМ в первом такте равна:

В течение следующего, второго такта, ОЭМ вала 2 прилагает к нему тормозящий момент -т0 (во втором такте он ведущий) и производит работу -т0(θ+ϕ2), а ОЭМ вала 1 (во втором такте он задний) прикладывает к нему ускоряющий момент т0 и производит работу т0(θ+ϕ1). Работа выполненная двумя ОЭМ во втором такте та же самая, что и в первом:

Работа газов в двух тактах равна 2WT. Из условия равенства нулю суммы работ газов и внешних моментов за период

находим величину момента т0:

[0051] При условии, что момент т0 приложен к валу 2 и момент -т0 приложен к валу 1, и что начальные скорости валов и биссектрисы угла между ними равны нулю, методом итераций находим время tS в течении которого разогретые газы расширяются от объема V1 до V2, то есть, находим время такта, которое оказывается равным 21.53⋅10-3 с. Угол поворота биссектрисы за это время будет равен нулю, так как суммарный внешний момент приложенный к валам равен нулю.
Вычисляем то значение начальной скорости биссектрисы ω0, при которой угол поворота в течении такта будет равным 90°:

[0052] Сделанные вычисления позволяют дать описание стационарного режима работы РЛМ с двумя ОЭМ. Методом итераций было рассчитано вращение валов валов РЛМ при найденных численных значениях начальной скорости и моментов приложенных к обоим валам.
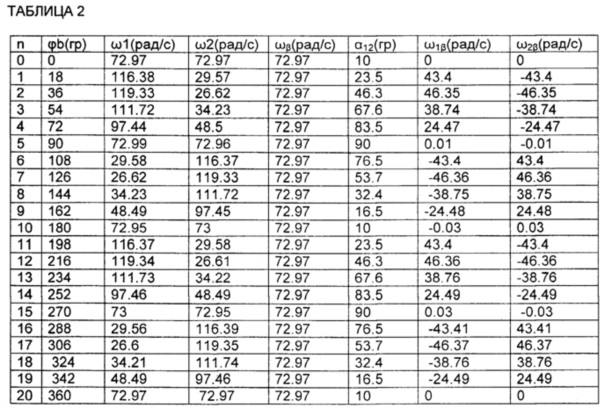
На фиг. 11 дана зависимость скорости биссектрисы ωβ (рад/с, пунктирная линия) и зависимость угла между валами α12 (град, сплошная линия) от времени в течение четырех тактов. фиг. 12 дает зависимость скорости вала 1 относительно биссектрисы ω1β (рад/с, сплошная линия) и зависимость скорости вала 2 относительно биссектрисы ω2β (рад/с, пунктирная линия). ТАБЛИЦА 2 дает числовые значения координат биссектрисы ϕb, скоростей валов ω1, ω2 и функций представленных на фиг. 11 и фиг. 12 в интервале времени четырех тактов, который разбит на двадцать равных частей.
Из этой таблицы видно, что когда координата биссектрисы угла между валами ϕb принимает значения 90°, 180°, 270° и 360°, угол между валами α12 становится равным 90°, 10°, 90° и 10° соответственно, что подтверждает согласованное друг с другом вращение валов и их правильное вращение относительно цилиндрической полости.
[0053] Кратко об основных параметрах РЛМ с двумя ОЭМ:
- Мощность отдаваемая в нагрузку: 45 кВт (61 л.с.) при 697 об/мин,
- Литраж: 3.2 л,
- Мощность ОЭМ: 51 кВт.
[0054] В обоих примерах с использованием одной или двух ОЭМ необходимое согласование вращения валов РЛМ достигается приложением к валам моментов со стороны ОЭМ. Функция ОЭМ сводится к периодическому отбору энергии выделяемой сгорающим топливом, что оказывается достаточным для достижения необходимого согласования. В обоих примерах не были задействованы датчики положений валов, не было упомянуто об управлении углами поворотов или скоростями валов с помощью компьютерного устройства.
[0055] В любом варианте практической реализации способа или устройства обратная связь и управление моментами ОЭМ будут необходимы, поскольку отклонения от стационарного режима работы неизбежны. При практической реализации, слежение за положениями обоих валов с помощью датчиков положений необходимо компьютерному устройству, следящему за отклонениями в РЛМ от ожидаемого стационарного режима. Система управления компенсирует эти отклонения внесением необходимой коррекции в величину или длительность моментов ОЭМ.
ПРИМЕНИМОСТЬ В ПРОМЫШЛЕННОСТИ
[0056] Предлагаемый способ согласования вращения валов роторно-лопастного двигателя с использованием одной или двух обратимых электрических машин может быть применен в машинах-генераторах преобразующих тепловую энергию сгорающего топлива в электрическую энергию.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2292470C2 |
| РОТОРНО-ЛОПАСТНАЯ МАШИНА (варианты) | 2016 |
|
RU2626186C1 |
| РОТОРНО-ЛОПАСТНАЯ МАШИНА | 2015 |
|
RU2578383C1 |
| СПОСОБ РАБОТЫ РОТОРНО-ЛОПАСТНОЙ МАШИНЫ (ВАРИАНТЫ) И РОТОРНО-ЛОПАСТНАЯ МАШИНА | 2013 |
|
RU2587506C2 |
| РОТОРНО-ЛОПАСТНАЯ МАШИНА (варианты) | 2016 |
|
RU2632635C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2168033C2 |
| МУЛЬТИРОТОРНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2019 |
|
RU2728304C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ГРИДИНА | 2005 |
|
RU2292463C2 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ-(ВАРИАНТЫ) | 2012 |
|
RU2589882C2 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ | 1994 |
|
RU2054122C1 |
Группа изобретений относится к способу согласования вращения валов роторно-лопастного двигателя-генератора и роторно-лопастному двигателю-генератору. Двигатель-генератор содержит два коаксиальных вала 1, 2 с установленными датчиками 10 и 11 их положений, обратимую электрическую машину 5 с электронной системой управления ее токами на одном из валов, аккумулятор 14 и электрическую нагрузку 15. При согласованном вращении валов 1, 2 образуются камеры переменного объема, в которых происходят такты всасывания, сжатия, рабочего хода и выхлопа. Суммарная производимая работа и угловая скорость вращения определяются опытным или расчетным путем, и для обеспечения стационарных циклов двигатель-генератор развивает чередующиеся ускоряющие и тормозящие моменты. Группа изобретений направлена на создание простого и надежного способа согласования вращения валов без применения каких-либо механических связей, влияющих на характер вращения валов роторно-лопастного двигателя-генератора. 7 н.п. ф-лы, 12 ил., 2 табл.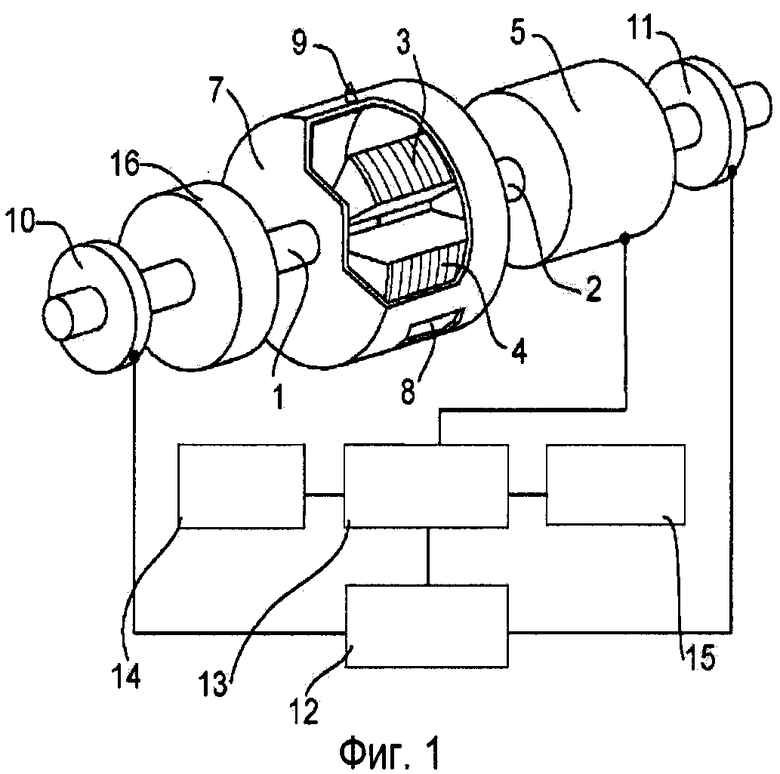
1. Способ согласования вращения валов роторно-лопастного двигателя-генератора, содержащего два коаксиальных вала с закрепленными на них лопастями, образующими между собой камеры изменяющихся объемов, в которых происходят такты всасывания, сжатия, рабочего хода и выхлопа, содержащего также датчики положения валов, обратимую электрическую машину с электронной системой управления ее токами на одном из валов, аккумулятор и электрическую нагрузку, отличающийся тем, что
- опытным или расчетным путем определяют суммарную работу WT, совершаемую газами в течение тактов сжатия и рабочего хода,
- опытным или расчетным путем определяют продолжительность одного такта ts и угол β поворота биссектрисы между валами, совершаемый при нулевой начальной скорости, в течение которого обратимая электрическая машина прикладывает к заднему валу ускоряющий момент, производящий при повороте этого вала на угол θ+ϕ1 работу, равную:
2WT(θ+ϕ1)/(ϕ2-ϕ1),
где θ - угловой размер лопасти, ϕ1 - угловой размер камеры к моменту завершения в ней такта сжатия, ϕ2 - угловой размер камеры в момент начала в ней такта сжатия,
- вычисляют скорость валов ωo в начале первого такта в стационарном режиме работы:
где N число лопастей на каждом из валов,
- при найденной скорости валов ωo в начале тактов стационарного режима работы, когда вал с обратимой электрической машиной является задним, к нему прикладывается ускоряющий момент, который совершает работу, равную 2WT(θ+ϕ1)/(ϕ2-ϕ1), а в тактах, когда вал с обратимой электрической машиной является ведущим, к нему прикладывается тормозящий момент, который совершает работу, равную -2WT(θ+ϕ2)/(ϕ2-ϕ1).
2. Способ согласования вращения валов роторно-лопастного двигателя-генератора, содержащего два коаксиальных вала с закрепленными на них лопастями, образующими между собой камеры изменяющихся объемов, в которых происходят такты всасывания, сжатия, рабочего хода и выхлопа, содержащего также датчики положения валов, обратимые электрические машины с электронной системой управления их токами на каждом из валов, аккумулятор и электрическую нагрузку, отличающийся тем, что
- опытным или расчетным путем определяют суммарную работу WT, совершаемую газами в течение тактов сжатия и рабочего хода,
- опытным или расчетным путем определяют продолжительность одного такта ts, в течение которого к заднему валу обратимая электрическая машина прикладывает ускоряющий момент, производящий при повороте этого вала на угол θ+ϕ1 работу, равную:
WT(θ+ϕ1)/(ϕ2-ϕ1),
где θ - угловой размер лопасти, ϕ1 - угловой размер камеры к моменту завершения в ней такта сжатия, ϕ2 - угловой размер камеры в момент начала в ней такта сжатия,
а к ведущему валу обратимая электрическая машина прикладывает тормозящий момент, производящий при повороте этого вала на угол θ+ϕ2 работу, равную:
-WT(θ+ϕ2)/(ϕ2-ϕ1),
- вычисляют скорость валов в начале тактов ωo в стационарном режиме работы:
где N число лопастей на каждом из валов,
- при найденной скорости валов ωo в начале каждого такта стационарного режима работы на задний вал прикладывается ускоряющий момент, производящий работу, равную WT(θ+ϕ1)/(ϕ2-ϕ1), а на ведущий вал прикладывается тормозящий момент, производящий работу, равную
-WT(θ+ϕ2)/(ϕ2-ϕ1).
3. Способ согласования вращения валов роторно-лопастного двигателя-генератора в стационарном режиме его работы, который имеет два коаксиальных вала, вал 1 и вал 2, с лопастями в прилегающей к лопастям полости, в которой при вращении лопастей происходят периодические изменения объемов камер между лопастями и изменения положений лопастей относительно вышеуказанной полости, необходимые для протекания в упомянутых камерах тактов двигателя внутреннего сгорания, имеющего по меньшей мере на одном из валов обратимую электрическую машину с компьютеризированной системой управления, имеющего датчики угловых координат валов и имеющего аккумулирующее устройство для временного хранения электрической энергии, отличающийся тем, что - прикладывают к валу 1 со стороны обратимой электрической машины, если она установлена на этом валу, ускоряющий момент М1 в тех тактах, когда вал 1 является задним, и тормозящий момент - М1, когда вал 1 является ведущим, а к валу 2 со стороны обратимой электрической машины, если она установлена на этом валу, прикладывают ускоряющий момент М2 в тех тактах, когда вал 2 является задним, и тормозящий момент - М2, когда вал 2 является ведущим, причем величины моментов М1 и М2 таковы, что сумма работ этих моментов и работ газов в камерах в течение двух последовательных тактов равна нулю.
4. Роторно-лопастной двигатель-генератор, в котором использован способ согласования вращения валов по п. 1.
5. Роторно-лопастной двигатель-генератор, в котором использован способ согласования вращения валов по п. 2.
6. Роторно-лопастной двигатель-генератор, преобразующий тепловую энергию сгорающего топлива в электрическую энергию с обратимой электрической машиной на одном из валов, в котором для согласования вращения валов в стационарном режиме его работы используется способ по п. 3.
7. Роторно-лопастной двигатель-генератор, преобразующий тепловую энергию сгорающего топлива в электрическую энергию с обратимыми электрическими машинами на обоих валах, в котором для согласования вращения валов в стационарном режиме его работы используется способ по п. 3.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| РОТОРНО-ЛОПАСТНОЙ ДВС | 2003 |
|
RU2237817C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| JP 2008232105 A, 02.10.2008. | |||

