Изобретение относится к технике авиационной радиосвязи и предназначено для определения оптимальных по частоте и направлению декаметровых (ДКМ) радиоканалов связи с использованием линейно-частотно-модулированных (ЛЧМ) сигналов и может использоваться для обеспечения высоконадежной ДКМ-радиосвязи.
Благодаря существенному прогрессу в развитии технологической базы цифровой обработки сигналов и средств вычислительной техники ДКМ радиосвязь может использоваться не только для традиционной передачи речевой информации, но и для высокоскоростной передачи данных. Естественно по скорости передачи данных ДКМ радиосвязь несколько уступает некоторым другим системам связи, например спутниковым, однако она имеет ряд преимуществ, являющихся ключевыми. Ее преимущества заключаются в большом радиусе действия, высокой живучести и помехозащищенности, а также низкой эксплуатационной стоимости радиолиний.
В то же время, основная проблема ДКМ-радиосвязи - нестационарность ионосферного канала, обусловленная воздействием различного рода возмущений как естественного, так и искусственного происхождения. Эти влияния и воздействия обычно учитываются при составлении волнового расписания, в котором указываются рабочие и резервные частоты и время их смены. Однако осуществить высоконадежную и бесперебойную ДКМ-радиосвязь в каналах "борт летательного аппарата (ЛА) - земля" сложно, как в техническом, так и в организационном планах, что связано прежде всего с большими скоростями ЛА (до 2000 км/ч). За короткое время ЛА проходит много временных поясов с различной геофизической обстановкой и различными условиями ионосферного распространения ДКМ радиоволн.
Для коренного решения проблемы улучшения работы авиационных систем ДКМ-радиосвязи и достижения надежности связи 0,95-0,99 с использованием ионосферных радиоканалов необходимо осуществлять комплексную адаптацию, которая позволяет производить автоматическую подстройку основных характеристик системы связи в соответствии с быстрыми изменениями условий распространения электромагнитных волн и помех на радиолинии полета ЛА. В частности, на заданной трассе оптимальные параметры радиолинии могут быть определены системами наклонного зондирования ионосферы ЛЧМ сигналом.
Известны устройства по патентам RU 2001529, RU 2535243, RU 2223601, предназначенные для поиска и контроля качественных каналов ДКМ-радиосвязи по результатам зондирования ионосферы ЛЧМ сигналом. Однако приведенные выше устройства оценивают состояние радиоканалов посредством измерения и вычисления ограниченного числа параметров, что не приводит к заметному улучшению надежности радиосвязи. В частности не учитываются такие ключевые характеристики ионосферного канала, которые присутствуют всегда, как неоднородность ионосферы, полоса когерентности и многолучевость канала.
Наиболее близким аналогом, выбранным в качестве прототипа заявленного изобретения, является устройство для определения оптимальных рабочих частот ионосферного радиоканала по патенту RU 2394371. Недостатком известного устройства является то, что оно не позволяет адаптировать систему связи по направлению, а также выбирать наилучшую рабочую частоту из всего диапазона случайным образом, без предварительного задания оператором таблицы тестируемых частот.
Технической задачей, на решение которой направлено заявляемое изобретение, является автоматическое определение наилучшего ДКМ-радиоканала в направлении борт ЛА - земля, обеспечивающего при заданном режиме работы бортового комплекса средств связи (БКСС) надежность передачи сообщений 0,95-0,99, адаптированного как по частоте, так и по направлению за счет использования результатов, полученных путем обработки данных наклонного ЛЧМ зондирования по четырем направлениям при помощи специального алгоритма, анализирующего условия распространения радиоволн, помеховую обстановку и оптимальные рабочие частоты, выбираемые случайным образом, без предварительного задания таблицы тестируемых частот.
Указанный технический результат достигается тем, что в устройство для анализа и выбора оптимальных авиационных ДКМ-радиоканалов с использованием линейно-частотно-модулированных (ЛЧМ) сигналов содержащее GPS/ГЛОНАСС приемник с антенной, приемное устройство с приемной антенной, дополнительно включен спецвычислитель, предназначенный для выбора наилучших рабочих частот и направлений, путем обработки потоков данных, содержащих разностные квадратурные сигналы, принятые от четырех не коррелируемых наземных зондирующих передатчиков, а приемное устройство представляет собой четырехканальное приемное устройство, включающее устройство управления и точного времени и последовательно соединенные с приемной антенной фильтр низких частот, управляемый усилитель высокой частоты (УВЧ), аналого-цифровой преобразователь (АЦП) и четырехканальный приемный процессор, при этом первый выход четырехканального приемного процессора подключен к первому входу спецвычислителя, в второй выход подключен к управляемому усилителю высокой частоты (УВЧ), первый выход GPS/ГЛОНАСС приемника подключен ко второму входу спецвычислителя, а второй выход GPS/ГЛОНАСС приемника подключен к входу данных о мировом времени устройства управления и точного времени, вход информации о параметрах принимаемого ЛЧМ сигнала которого подключен к первому выходу спецвычислителя, а со второго выхода спецвычислителя данные об оптимальном ДКМ-радиоканале передаются в бортовой комплекс средств связи (БКСС) ЛА.
Четырехканальный приемный процессор включает в себя четыре одинаковых блока основной селекции и получения низкочастотных квадратур принятого сигнала, входы данных которых подключены к выходу АЦП, блок интерфейса связи со спецвычислителем, входы которого подключены к выходам блоков основной селекции и получения низкочастотных квадратур принятого сигнала, блок интерфейса связи с устройством управления и точного времени, вход которого подключен к выходу устройства управления и точного времени, а выходы его подключены к входам блоков основной селекции и получения низкочастотных квадратур принятого сигнала, и блок управления входными цепями, входы которого подключены к выходам блоков основной селекции и получения низкочастотных квадратур принятого сигнала и к выходу индикатора перегрузки АЦП, а выход блока управления входными цепями подключен к управляющему входу УВЧ.
Каждый блок основной селекции и получения низкочастотных квадратур принятого сигнала содержит цифровой управляемый ЛЧМ генератор, управляющий вход которого подключен к соответствующему выходу блока интерфейса связи с устройством управления и точного времени, два перемножителя преобразователя частоты, первые входы которых подключены к соответствующим выходам синусоидального сигнала цифрового управляемого ЛЧМ генератора, а вторые входы подключены к выходу АЦП, два блока предварительной фильтрации и децимации, вход каждого из которых подключен к выходу соответствующего перемножителя преобразователя частоты, два блока основной фильтрации и окончательной децимации, вход каждого из которых подключен к выходу соответствующего блока предварительной фильтрации и децимаци, два перемножителя системы регулировки усиления, первый вход каждого из которых подключен к выходу соответствующего блока основной фильтрации и окончательной децимации, а второй вход каждого перемножителя системы регулировки усиления подключен к первому выходу блока регулировки усиления, выходы перемножителей системы регулировки усиления являются выходами блока основной селекции и получения низкочастотных квадратур принятого сигнала, через которые он подключен к соответствующим входам блока интерфейса связи со спецвычислителем, блок получения амплитуды сигнала, первый и второй входы которого подключены соответственно к выходам перемножителей системы регулировки усиления, вход блока регулировки усиления подключен к выходу блока получения амплитуды сигнала, второй выход - к блоку управления входными цепями приемника, а третий выход блока регулировки усиления подключен к соответствующему входу блока интерфейса связи со спецвычислителем.
Спецвычислитель включает в себя блок интерфейса связи с приемным процессором, выходы которого подключены к входам блоков выбора наилучших частот по направлению, блок окончательного решения, входы которого подключены к выходам блоков выбора наилучших частот по направлению, блок задания расписаний работ, второй выход которого подключен к блоку окончательного решения, через вход блока задания расписаний работ спецвычислитель подключен к первому выходу GPS/ГЛОНАСС приемника, через первый выход блока задания расписаний работ спецвычислитель подключен к входу данных о мировом времени устройства управления и точного времени, а выход блока окончательного решения является выходом спецвычислителя, с которого данные об оптимальном ДКМ-радиоканале передаются в бортовой комплекс средств связи (БКСС) ЛА.
Каждый блок выбора наилучших частот по направлению включает в себя блок предварительной обработки и нахождения частотных участков спектра с лучшим прохождением, вход которого подключен к соответствующему выходу блока интерфейса связи с приемным процессором, блок нахождения частот свободных от помех и формирования таблицы контролируемых частот, вход которого подключен к выходу блока предварительной обработки и нахождения частотных участков с лучшим прохождением, и блок нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит, вход которого подключен к выходу блока нахождения частот свободных от помех и формирования таблицы контролируемых частот, при этом выходы каждого из блоков нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит, содержащихся в блоках выбора наилучших частот по направлению, подключены к соответствующим входам блока окончательного решения.
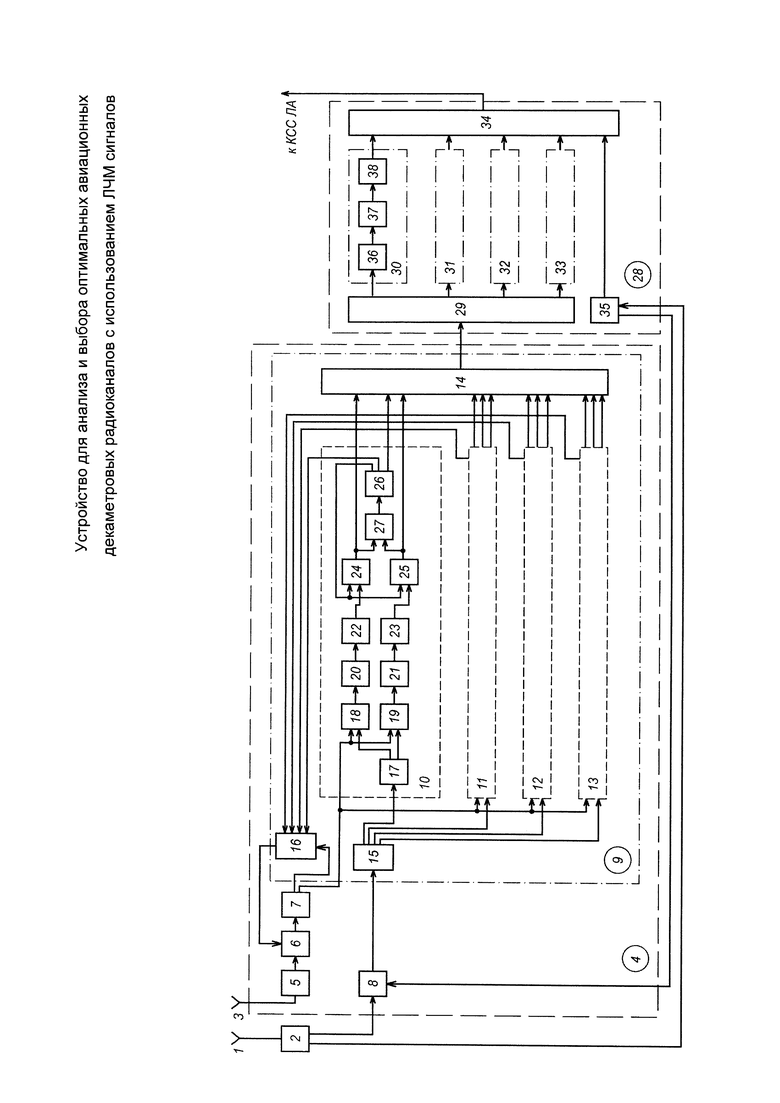
На фигуре приведена структурная схема предлагаемого устройства, где обозначено:
1 - антенна GPS/ГЛОНАСС;
2 - приемник GPS/ГЛОНАСС;
3 - приемная антенна;
4 - четырехканальное приемное устройство;
5 - фильтр низких частот;
6 - управляемый усилитель высокой частоты (УВЧ);
7 - аналого-цифровой преобразователь (АЦП);
8 - устройство управления и точного времени;
9 - четырехканальный приемный процессор;
10, 11, 12, 13 - четыре одинаковых блока основной селекции и получения низкочастотных квадратур принятого сигнала;
14 - блок интерфейса связи со спецвычислителем;
15 - блок интерфейса связи с устройством управления и точного времени;
16 - блок управления входными цепями;
17 - цифровой управляемый ЛЧМ генератор;
18, 19 - перемножители преобразователя частоты;
20, 21 - блоки предварительной фильтрации и децимации;
22, 23 - блоки основной фильтрации и окончательной децимации;
24, 25 - перемножители системы регулировки усиления;
26 - блок регулировки усиления;
27 - блок получения амплитуды сигнала;
28 - спецвычислитель;
29 - блок интерфейса связи с приемным процессором;
30, 31, 32, 33 - блоки выбора наилучших частот по направлению;
34 - блок окончательного решения;
35 - блок задания расписаний работ;
36 - блок предварительной обработки и нахождения частотных участков с лучшим прохождением;
37 - блок нахождения частот свободных от помех и формирования таблицы контролируемых частот;
38 - блок нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит.
Устройство для анализа и выбора оптимальных авиационных ДКМ-радиоканалов с использованием ЛЧМ сигналов включает антенну GPS/ГЛОНАСС 1, подключенную к GPS/ГЛОНАСС приемнику 2, соединенному с четырехканальным приемным устройством 4 и спецвычислителем 28, а так же приемную антенну 3, подключенную к четырехканальному приемному устройству 4, которое в свою очередь подключено к спецвычислителю 28.
Четырехканальное приемное устройство 4 (обведено на фигуре пунктирной линией) включает устройство управления и точного времени 8 и последовательно соединенные фильтр низких частот 5, управляемый усилитель высокой частоты (УВЧ) 6, аналого-цифровой преобразователь (АЦП) 7 и четырехканальный приемный процессор 9 (обведен на фигуре штрих-пунктирной линией). Вход данных о мировом времени устройства управления и точного времени 8 подключен к выходу GPS/ГЛОНАСС приемника 2, а вход информации о параметрах принимаемого ЛЧМ сигнала подключен к выходу управления ЛЧМ приемника спецвычислителя 28. Четырехканальный приемный процессор 9 (обведен на фигуре штрих-пунктирной линией) включает в себя четыре одинаковых блока основной селекции и получения низкочастотных квадратур принятого сигнала 10, 11, 12, 13 (обведены на фигуре пунктирной линией), входы данных которых подключены к выходу АЦП 7, блок интерфейса связи со спецвычислителем 14, входы которого подключены к выходам блоков основной селекции и получения низкочастотных квадратур принятого сигнала 10, 11, 12, 13, блок интерфейса связи с устройством управления и точного времени 15, вход которого подключен к выходу устройства управления и точного времени 8, а выходы его подключены к входам блоков основной селекции и получения низкочастотных квадратур принятого сигнала 10, 11, 12, 13, и блок управления входными цепями приемника 16, входы которого подключены к выходам блоков регулировки усиления 26, входящих в состав блоков основной селекции и получения низкочастотных квадратур принятого сигнала 10, 11, 12, 13, и выходу индикатора перезагрузки АЦП 7, а выход к управляющему входу УВЧ 6. Каждый блок основной селекции и получения низкочастотных квадратур принятого сигнала 10, 11, 12, 13, содержит цифровой управляемый ЛЧМ генератор 17, управляющий вход которого подключен к соответствующему выходу блока интерфейса связи с устройством управления и точного времени 15, перемножитель преобразователя частоты 18, первый вход которого подключен к выходу синусоидального сигнала управляемого ЛЧМ генератора 17, а второй вход подключен к выходу АЦП 7 (он одновременно является входом блока основной селекции и получения низкочастотных квадратур принятого сигнала), перемножитель преобразователя частоты 19, первый вход которого подключен к выходу косинусоидального сигнала управляемого ЛЧМ генератора 17, а второй вход подключен к выходу АЦП 7, блоки предварительной фильтрации и децимации 20 и 21, входы которых подключены к выходам перемножителей преобразователя частоты 18 и 19 соответственно, блоки основной фильтрации и окончательной децимации 22 и 23, входы которых подключены к выходам блоков предварительной фильтрации и децимации 20 и 21 соответственно, блоки перемножителей системы регулировки усиления 24 и 25, первые входы которых подключены к выходам блоков основной фильтрации и окончательной децимации 22 и 23 соответственно, а вторые входы - к выходу блока регулировки усиления 26, выходы блоков перемножителей системы регулировки усиления 24 и 25 являются выходами блока основной селекции и получения низкочастотных квадратур принятого сигнала, через которые он подключен к входу блока интерфейса связи со спецвычислителем 14, блок получения амплитуды сигнала 27, первый вход которого подключен к выходу блока перемножителя системы регулировки усиления 24, второй вход подключен к выходу блока переможителя системы регулировки усиления 25, и блок регулировки усиления 26, вход которого подключен к выходу блока получения амплитуды сигнала 27, а выход - к блоку управления входными цепями приемника 16. Кроме этого, предлагаемое устройство включает в себя спецвычислитель 28 (обведен на фигуре пунктирной линией), предназначенный для выбора наилучших рабочих частот и направлений, путем обработки потоков данных, содержащих разностные квадратурные сигналы, принятые от четырех наземных зондирующих передатчиков. Спецвычислитель 28 включает в себя блок интерфейса связи с приемным процессором 29, вход которого подключен к выходу блока интерфейса связи со спецвычислителем 14 четырехканального приемного процессора 9, четыре одинаковых блока выбора наилучших частот по направлению 30, 31, 32, 33 (обведены на фигуре штрих-пунктирной линией), блок окончательного решения 34 и блок задания расписаний работ 35. Каждый блок выбора наилучших частот по направлению 30, 31, 32, 33 включает в себя блок предварительной обработки и нахождения частотных участков спектра с лучшим прохождением 36, вход которого подключен к соответствующему выходу блока интерфейса связи с приемным процессором 29, блок нахождения частот свободных от помех и формирования таблицы контролируемых частот 37, вход которого подключен к выходу блока предварительной обработки и нахождения частотных участков с лучшим прохождением 36, и блок нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит 38, вход которого подключен к выходу блока нахождения частот свободных от помех и формирования таблицы контролируемых частот 37. Выходы каждого из блоков нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит 38, содержащихся в блоках выбора наилучших частот по направлению 30, 31, 32, 33, подключены к соответствующим входам блока окончательного решения 34, где осуществляется окончательный выбор рабочей частоты и направления работы бортового комплекса средств связи летательного аппарата. С выхода блока окончательного решения 34, который является выходом всего устройства, данные об оптимальном ДКМ-радиоканале передаются в БКСС ЛА.
Предлагаемое устройство работает следующим образом.
Сигналы ЛЧМ-передатчиков от наземных узлов связи принимаются антенной 3 и поступают в приемное устройство 4 на вход фильтра низких частот (ФНЧ) 5, который предназначен для борьбы с явлением эллайзинга (ложным приемом сигналов вне полосы приемника 2-30 МГц). Полоса пропускания фильтра не должна превышать fd/2, где fd - есть частота дискретизации входного сигнала, на которой работает АЦП 7. С выхода ФНЧ 5 сигнал поступает на вход УВЧ 6, предназначенного для усиления сигналов в диапазоне 2-30 МГц и согласования выхода ФНЧ 5 со входом АЦП 7. Усиление УВЧ 6 может меняться по сигналу управления, приходящему с блока управления входными цепями 16.
С выхода УВЧ 6 сигнал поступает на вход АЦП 7 для оцифровки ВЧ сигнала во всем диапазоне от 0 до 30 МГц. АЦП 7 должен работать с частотой дискретизации fd не менее (SF⋅2), где SF - полоса принимаемого сигнала. С выхода АЦП 7 сигнал в цифровом виде поступает на первые входы перемножителей преобразователя частоты 18 и 19 блоков основной селекции и получения низкочастотных квадратур 10, 11, 12, 13 (далее будет рассмотрена работа одного из блоков), на вторые входы перемножителей преобразователя частоты 18 и 19 поступают сигналы с выхода цифрового управляемого ЛЧМ генератора 17. При этом один из сигналов формируется в соответствии с законом sin((ωо+Δωt)t), второй в соответствии с законом cos((ωo+Δωt)t), где ωо=2πFo, Δω=2πΔF, Fо - начальная частота ЛЧМ сигнала, ΔF - скорость изменения частоты ЛЧМ сигнала. Таким образом, на выходах перемножителей преобразователя частоты 18 и 19 получаются квадратурные компоненты разностного сигнала на нулевой частоте в цифровом виде с частотой дискретизации fd, на которой работает АЦП 7. Для дальнейшей обработки сигнала необходимо понизить частоту дискретизации и сузить полосу сигнала для селекции принимаемого ЛЧМ сигнала, отраженного от различных слоев ионосферы.
Эту задачу выполняют блоки предварительной фильтрации и децимации 20 и 21 и блоки основной фильтрации и окончательной децимации 22 и 23. Реальная и мнимая компоненты комплексного принимаемого сигнала с выходов перемножителей преобразователя частоты 18 и 19 приходят на входы блоков предварительной фильтрации и децимации 20 и 21 соответственно. Блоки 20 и 21 представляют собой двухкаскадные CIC фильтры, они значительно понижают частоту дискретизации и осуществляют предварительную фильтрацию квадратурных компонент принимаемого сигнала. С выходов блоков предварительной фильтрации и децимации 20 и 21 квадратурные компоненты сигнала поступают на входы блоков основной фильтрации и окончательной децимации 22 и 23 соответственно. В блоках 22 и 23, представляющих собой двухкаскадный КИХ фильтр, формируется полоса основной селекции приемного тракта. Коэффициенты децимации блоков 20, 21, 22, 23 подбираются специальным образом для достижения приемлемого подавления компонент принимаемого сигнала вне полосы приемных частот при создании программного обеспечения четырехканального приемного устройства 4. С выходов блоков основной фильтрации и окончательной децимации 22 и 23 квадратурные компоненты принимаемого сигнала на нулевой частоте в полосе приемных частот и с низкой (десятки кГц) частотой дискретизации приходят на первые входы блоков перемножителей системы регулировки усиления 24 и 25 соответственно. Блоки 24 и 25 выполняют функции регулирующего элемента в схеме автоматической регулировки усиления (АРУ) тракта четырехканального приемного устройства 4. С выходов блоков перемножителей системы регулировки усиления 24 и 25 квадратурные компоненты принятого сигнала поступают на соответствующие входы блока интерфейса связи со спецвычислителем 14. Кроме того, эти же компоненты принятого сигнала поступают на входы блока получения амплитуды сигнала 27, с выхода которого значение амплитуды принятого сигнала поступает на вход блока регулировки усиления 26. Коэффициент усиления цифрового тракта приемного канала определяется по формуле:
Кy=Кaрy/Yi, где
Кару - коэффициент усиления системы АРУ (автоматической регулировки усиления);
Yi=Yi-1+α(A-Yi-1) - значение накопителя интегратора системы АРУ на i-ом отсчете зависящее от текущей амплитуды сигнала А, коэффициента α, определяющего время реакции системы АРУ, и значения накопителя интегратора системы АРУ на (i-1)-ом отсчете.
С первого выхода блока регулировки усиления 26 вычисленные данные, несущие в себе информацию об усилении цифрового тракта приемного канала, поступают на вторые входы блоков перемножителей системы регулировки усиления 24 и 25. Кроме того, со второго выхода блока регулировки усиления 26 данные о требуемом коэффициенте усиления входных цепей поступают на один из входов блока управления входными цепями 16, который предназначен для управления усилителем высокой частоты 6. Блок управления входными цепями 16 работает по принципу "наибольшего сигнала". При приходе с одного из каналов данных с информацией о том, что требуется уменьшить коэффициент усиления аналоговой части тракта, алгоритм блока 16 принимает решение об уменьшении усиления и подает соответствующий сигнал на управляемый УВЧ 6. При этом потеря приема меньшего сигнала (сигналов) по другим каналам не является критичной, так как задача устройства - поиск наиболее энергетически выгодных частотно-пространственных каналов.
Данный принцип позволяет реализовать диагностическое четырехканальное приемное устройство 4 с оцифровкой сигнала во всем ДКМ диапазоне без использования АЦП высокой разрядности. Исключение в этом принципе составляет временной интервал, в течение которого зондируется текущий частотный канал, в котором в данное время работает БКСС ЛА. В это время приоритетным каналом для выбора коэффициента усиления является канал приема сигнала с направления, в котором в данное время работает БКСС ЛА. С третьего выхода блока регулировки усиления 26 данные о текущем коэффициенте усиления канала поступают на входы блока интерфейса связи со спецвычислителем 14. Этот блок объединяет данные о квадратурных компонентах принимаемых сигналов и коэффициентах усиления каналов в пакеты и передает их по высокоскоростной шине на вход блока интерфейса связи с приемным процессором 29 спецвычислителя 28.
Устройство управления и точного времени 8 содержит программно-аппаратные часы, которые синхронизируются по полученным через антенну 1 данным и сигналу секундной метки GPS/ГЛОНАСС приемника 2. Также устройство управления и точного времени 8 формирует данные для управления цифровыми управляемыми ЛЧМ генераторами 17 блоков основной селекции и получения низкочастотных квадратур 10, 11, 12, 13. Эти данные с выхода блока управления и точного времени 8 через блок интерфейса связи с устройством управления и точного времени 15, который осуществляет маршрутизацию, поступают на входы управления цифровых управляемых ЛЧМ генераторов 17. Данные для управления цифровыми управляемыми ЛЧМ генераторами 17 формируются в устройстве управления и точного времени 8 согласно данным о расписаний работ наземных ЛЧМ передатчиков. Эти данные поступают в устройство управления и точного времени 8 с выхода блока задания расписаний работ 35 спецвычислителя 28.
В устройство управления и точного времени 8 из блока задания расписания работ 35 поступают данные: время начала сеанса, его начальная частота, скорость приращения частоты ЛЧМ сигнала и конечная частота. Согласно этим данным в блоке 8 формируются такие данные, как код начальной частоты, код конечной частоты, значение временного интервала и частотной ступеньки (это время в течение которого частота генераторов 17 остается постоянной), значение фазовой добавки (последние 2 параметра вычисляются по специальному алгоритму, который позволяет получить ЛЧМ сигнал с квазинеразрывной фазой). Цифровые управляемые ЛЧМ генераторы 17 представляют собой численно-управляемые осцилляторы со специфическими аккумуляторами фазы, которые позволяют вносить дополнительный набег фазы, с помощью которого и формируется ЛЧМ сигнал. Дополнительное приращение фазы начинается в момент прихода с блока 8 стартового импульса, который формируется там согласно данным о времени начала сеанса с выхода блока 35.
Таким образом, на выходе интерфейса связи со спецвычислителем 14, который одновременно является выходом четырехканального приемного устройства 4, формируются пакеты данных, содержащие следующую информацию: квадратурные компоненты принятых сигналов 4-х каналов, коэффициенты усиления каждого из каналов. Эти данные поступают на вход блока интерфейса связи с приемным процессором 29 спецвычислителя 28, где происходит маршрутизация данных по каналам и их распределение по блокам выбора наилучших частот по направлению 30, 31, 32, 33 для дальнейшей обработки.
После маршрутизации данные, содержащие информацию о квадратурных компонентах сигнала, принимаемого в соответствующем канале, а также об усилении этого канала, поступают в один из блоков предварительной обработки и нахождения частотных участков спектра с лучшим прохождением 36 соответствующего блока выбора наилучших частот по направлению. В блоке 36 производится обработка сигналов в широкой полосе и вычисляются такие параметры, как спектральная плотность мощности (которая вычисляется многооконным методом), отношение мощности сигнала к мощности шума в полосе согласованной с сигналом (мощность шума определяется гистограммным способом). По отношению мощности сигнала к мощности шума в полосе согласованной с сигналом находятся частотные участки с наилучшим прохождением, для этого задается критерий, при удовлетворении которому принимается решение о дальнейшей обработке принятого сигнала, соответствующего найденному частотному участку диапазона. В состав критерия входит не только значение параметра сигнал/шум, при превышении которого качество канала считается удовлетворительным (далее пороговое значение), но и минимальная величина частотного участка спектра, на котором отношение сигнал/шум превышает пороговое значение. Этот параметр необходим для оптимизации работы алгоритма и исключения анализа ложных участков с хорошим прохождением (например прием сигнала ЛЧМ передатчика со скоростью перестройки отличной от скорости перестройки в сеансе и др. случайными отклонениями). В процессе анализа при нахождении частотных отрезков сигнала с более уверенным приемом (большим значением отношения сигнал/шум) критерий может корректироваться путем увеличения значения порога, а длины частотных участков, найденных в блоке 36, могут корректироваться в сторону уменьшения. Также, в блоке 36 при удовлетворении сигнала вышеописанному критерию рассчитываются такие параметры, как спектральная плотность мощности (СПМ) рассеянной компоненты, СПМ шумов, значения комплексных амплитуд зеркальных компонент, коэффициент мутности ионосферы (отношение энергии зеркальной компоненты к энергии рассеянной компоненты β2). С выхода блока 36 на вход блока нахождения частот свободных от помех и формирования таблицы частот 37 поступают такие данные, как начало и окончание участков с хорошим прохождением, ряды значений комплексных амплитуд зеркальных компонент сигнала, рассеянной (непрерывной) компоненты сигнала, коэффициента мутности ионосферы, СПМ шумов и отношения мощности сигнала и мощности шума в полосе, согласованной с сигналом, задержки парциальных зеркальных компонент сигналов в частотных участках, которые удовлетворяют критерию предварительного анализа описанному выше.
В блоке нахождения частот свободных от помех и формирования таблицы контролируемых частот 37 осуществляется работа алгоритма разделения лучей и находятся частотные интервалы с различной кратностью многолучевости. В блоке 37 оценивается помеховая обстановка на различных частотах. Для этого, в алгоритм разделения лучей вноситься сравнение мощности сигнала в полосе элементарного фильтра цифрового анализа (длина Фурье) до прохождения через алгоритм разделения лучей с аналогичным параметром после прохождения данных через алгоритм. Полоса элементарного фильтра должна быть выбрана таким образом, чтобы она была максимально близкой по величине к рабочей полосе приемника БКСС ЛА. Таким образом, определяется значение отношения сигнал/помеха, вычисляется мощность помехи и по определенному критерию, заданному заранее, определяются частоты свободные от помех. Результатом работы алгоритма анализа помеховой обстановки является бинарное решение для предполагаемой рабочей частоты БКСС ЛА, в соответствии с которым принимается решение о дальнейшем анализе данной частоты. Сетка тестируемых частот формируется по псевдослучайному закону, который позволяет гарантированно найти частоты свободные от помех на частотных участках, определенных в блоке 36, если таковые имеются.
Далее для каждой тестируемой частоты находятся такие параметры как:
- кратность многолучевости N соответствующая количеству лучей в ионосферном канале на тестируемой частоте (количество лучей в ионосферном канале может быть от 1 до 4);
- минимальное отношение амплитуд лучей Tmin=Min(Amax/Ai), где Amax - амплитуда доминирующего луча, Ai - амплитуды остальных лучей;
- отношение амплитуды доминирующего луча (луча с максимальной амплитудой) к сумме амплитуд всех лучей Тобщ=Ama/ΣAi, где Amax - амплитуда доминирующего луча, Ai - амплитуды остальных лучей.
После вычисления указанных параметров для тестируемой частоты по формуле:
Pоц=KNS⋅SNR/(KNT1⋅Tmin+KNТ2⋅Тобщ),
где SNR - отношение сигнал/шум на тестируемой частоте;
KNS, KNT1, KNT2 - заданные коэффициенты, которые рассчитываются заранее по специальному алгоритму для каждого используемого БКСС вида излучения (причем для каждой кратности многолучевости задается отдельный набор коэффициентов) находится критериальная оценка, которая служит для окончательного формирования таблицы частот.
Первоначальное заполнение таблицы производиться по пороговому принципу. Дальнейшее заполнение таблицы частот производится по принципу замещения. Так, если в процессе зондирования появляется частота с оценкой выше, чем у той частоты, которая уже есть в таблице, новая частота замещает предыдущую. При заполнении таблицы обязательно учитывается кратность многолучевости, то есть в таблицу должны попасть частоты из участков с разной кратностью.
В блоке нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит 38 вычисляется вероятность ошибки на бит и надежность связи, на частотах, выбранных предварительно в блоке нахождения частот свободных от помех и формирования таблицы контролируемых частот 37. Расчет вероятности ошибки и надежности связи осуществляется так же, как в прототипе. Оптимальная рабочая частота канала связи определяется для сигналов с различной статистикой замираний, в том числе для наиболее распространенного в ионосфере квазирелеевского канала, когда присутствует и зеркальная, и рассеянная компоненты сигнала. Для квазирелеевского канала вероятность битовой ошибки рассчитывается по формуле:

где β2 - коэффициент мутности ионосферы (отношение мощностей регулярной и флуктуационной компонент сигнала), h2 - отношение мощностей сигнал/шум.
Вероятность ошибки для широкополосных сигналов при некогерентном приеме с некогерентным сложением лучей рассчитывается по формуле:
где N - число лучей, рi - вероятность битовой ошибки для i-го луча.
Надежность связи рассчитывается исходя из того, что вероятность ошибки не превышает заданный порог рдоп, и выражается через интеграл вероятности:

где
zдоп=10 lg h2доп - допустимое значение отношения мощности сигнала к мощности помехи, соответствующее допустимой вероятности ошибки рдоп, z=z(f)=10 lg h2(f) - измеренное значение отношения мощности сигнала к мощности помехи, zдоп и z выражаются в децибелах,  - среднеквадратичное отклонение отношения сигнал/помеха, выраженное в децибелах, которое находится по экспериментальным данным в окрестности контролируемой частоты. В результате выбираются частоты, на которых надежность связи максимальна. Эти параметры (частоты и вероятности ошибки на них) со всех четырех блоков выбора наилучших частот по направлению 30, 31, 32, 33, передаются в блок окончательного решения 34, где находится наилучшая частота. При этом всегда анализируется частота, на которой в данное время работает БКСС ЛА и, если она удовлетворяет критерию надежности связи, переход на другую частоту не происходит даже несмотря на наличие лучших (с меньшей вероятностью ошибки) частот в этом или других направлениях. При этом оператор БКСС ЛА имеет возможность запроса другой частоты. Таким образом, устройство для анализа и выбора оптимальных авиационных ДКМ-радиоканалов с использованием ЛЧМ сигналов автоматически выбирает наилучший по частоте и направлению радиоканал случайным образом, так как окончательное решение по выбору канала принимается исходя из природных свойств ионосферы и уровня помех во время определения качества каналов, которые априори неизвестны.
- среднеквадратичное отклонение отношения сигнал/помеха, выраженное в децибелах, которое находится по экспериментальным данным в окрестности контролируемой частоты. В результате выбираются частоты, на которых надежность связи максимальна. Эти параметры (частоты и вероятности ошибки на них) со всех четырех блоков выбора наилучших частот по направлению 30, 31, 32, 33, передаются в блок окончательного решения 34, где находится наилучшая частота. При этом всегда анализируется частота, на которой в данное время работает БКСС ЛА и, если она удовлетворяет критерию надежности связи, переход на другую частоту не происходит даже несмотря на наличие лучших (с меньшей вероятностью ошибки) частот в этом или других направлениях. При этом оператор БКСС ЛА имеет возможность запроса другой частоты. Таким образом, устройство для анализа и выбора оптимальных авиационных ДКМ-радиоканалов с использованием ЛЧМ сигналов автоматически выбирает наилучший по частоте и направлению радиоканал случайным образом, так как окончательное решение по выбору канала принимается исходя из природных свойств ионосферы и уровня помех во время определения качества каналов, которые априори неизвестны.
Блок задания расписаний работ 35 хранит расписания работы наземных ЛЧМ передатчиков узлов связи, эти расписания записываются в него в процессе предполетной подготовки. Вход блока 35 подключен к выходу GPS/ГЛОНАСС приемника 2 откуда в блок поступают данные о текущем времени. Алгоритм работы блока 35 отслеживает приближающиеся моменты начала сеансов зондирования, распределяет сеанс приема по каналам устройства и передает данные о частотно-временных параметрах предстоящего сеанса и номер канала, в котором будет приниматься и обрабатываться сигнал во время сеанса, в устройство управления и точного времени 8 четырехканального приемного устройства 4. Кроме того данные о предстоящем сеансе зондирования передаются в блок окончательного решения 34 для идентификации направления привязки рядов данных и значений частот, вычисляемых в блоках 36, 37, 38, к шкалам частоты и соответствующим сеансам зондирования.
Аналоговую часть устройства представляют собой блоки 1, 3, 5, 6. Блоки 2 и 7 представляют собой смешанные аналогово-цифровые элементы. Все остальные блоки и устройства представляют собой цифровую технику. Приемный процессор 9 реализуется на одной или нескольких программируемых логических интегральных схемах (ПЛИС) или на специализированной микросхеме. Спецвычислитель 28 представляет собой полноценную специальную ЭВМ, способную одновременно обрабатывать несколько потоков информации и имеющую соответствующие интерфейсы со специальным программным обеспечением.
При одновременном приеме сигналов от 4-х наземных станций даже при недостаточной надежности отдельных каналов системная надежность более чем удовлетворительна. В патенте RU 2622767 показано, что надежность авиационного радиоканала при приеме сигналов от четырех пространственно-разнесенных некоррелированных наземных узлов связи (системная надежность) Рсист определяется формулой:

где  - усредненная надежность радиоканала ДКМ-связи для i-го радионаправления,
- усредненная надежность радиоканала ДКМ-связи для i-го радионаправления, - аппаратурная надежность для борта ЛА,
- аппаратурная надежность для борта ЛА,  - аппаратурная надежность для наземного ОпРЦ.
- аппаратурная надежность для наземного ОпРЦ.
Аппаратурная надежность для борта ЛА  и для наземного ОпРЦ
и для наземного ОпРЦ  определяются соответственно формулами:
определяются соответственно формулами:
где Аот - среднее время наработки на отказ в часах, Ав - среднее время восстановления аппаратуры после отказа в часах.
Для среднестатистических параметров расчет показывает, что при  ,
,  ,
,  ,
,  ,
, 
 даже для
даже для 
 системная надежность Рcист=0,999.
системная надежность Рcист=0,999.
Таким образом, устройство для анализа и выбора оптимальных авиационных ДКМ-радиоканалов с использованием ЛЧМ сигналов размещается на борту ЛА, автоматически находит наилучшие каналы для связи в ДКМ-диапазоне в направлении борт ЛА - земля и передает их (частоты и направления) в БКСС ЛА для дальнейшего установления связи в определенных каналах.
Предлагаемое устройство принимает и при помощи специального алгоритма, реализованного на базе блока 34, анализирует ЛЧМ сигналы от пространственно-разнесенных по четырем направлениям ЛЧМ-передатчиков наземных станций ионосферного мониторинга, что позволяет адаптировать систему связи не только по частоте, но и по направлению. Также предлагаемое устройство при помощи специального алгоритма, реализованного на базе 37, 38 блоков, позволяет анализировать помеховую обстановку и определять наилучшую рабочую частоту из всего диапазона случайным образом, без предварительного задания таблицы тестируемых частот оператором.
В качестве приемной антенны, осуществляющей прием зондирующих ЛЧМ-сигналов, может быть использована широкополосная активная приемная антенна с фильтрацией входного сигнала по патенту RU 2594384.
В настоящее время в АО «НПП «Полет» разработаны алгоритмы работы и схема устройства для анализа и выбора оптимальных авиационных ДКМ-радиоканалов с использованием ЛЧМ сигналов. Предлагаемое устройство может быть использовано при реализации способа организации авиационной адаптивной автоматической ДКМ-радиосвязи на незакрепленных частотах по патенту RU 2622767.0
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ авиационной адаптивной автоматической декаметровой радиосвязи на незакрепленных частотах | 2016 |
|
RU2622767C1 |
| МНОГОКАНАЛЬНЫЙ ПЕРЕПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ ТРАКТ | 2004 |
|
RU2289202C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ РАБОЧИХ ЧАСТОТ ИОНОСФЕРНОГО РАДИОКАНАЛА | 2009 |
|
RU2394371C1 |
| Носимая автоматизированная радиостанция диапазона КВ-УКВ | 2018 |
|
RU2696977C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ ПРИЕМА И ОБРАБОТКИ СИГНАЛОВ DME | 2011 |
|
RU2477571C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| ПОРТАТИВНАЯ ШИРОКОДИАПАЗОННАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2804517C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА В ЦИФРОВОЙ КВАДРАТУРНЫЙ КОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2613843C1 |
Изобретение относится к технике авиационной радиосвязи и предназначено для определения оптимальных по частоте и направлению декаметровых (ДКМ) радиоканалов связи с использованием линейно-частотно-модулированных (ЛЧМ) сигналов и может использоваться для обеспечения высоконадежной ДКМ-радиосвязи. Технический результат состоит в автоматическом определении наилучшего, оптимального по частоте и направлению ДКМ-радиоканала в направлении борт летательного аппарата (ЛА) - земля за счет использования результатов, полученных путем обработки данных наклонного ЛЧМ зондирования по четырем направлениям при помощи алгоритма, анализирующего условия распространения радиоволн, помеховую обстановку и оптимальные рабочие частоты, выбираемые случайным образом, без предварительного задания таблицы тестируемых частот. Для этого устройство содержит вычислитель, предназначенный для выбора наилучших рабочих частот и направлений путем обработки потоков данных, содержащих разностные квадратурные сигналы, принятые от четырех некоррелируемых наземных зондирующих передатчиков, при этом приемное устройство представляет собой четырехканальное приемное устройство, включающее устройство управления и точного времени, приемную антенну, фильтр низких частот, управляемый усилитель высокой частоты, аналого-цифровой преобразователь и четырехканальный приемный процессор, а данные об оптимальном ДКМ-радиоканале передаются в бортовой комплекс средств связи ЛА для дальнейшего установления связи в определенных каналах. 4 з.п. ф-лы, 1 ил.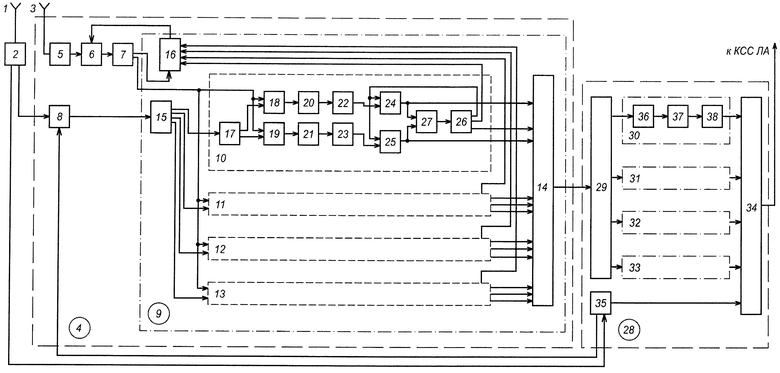
1. Бортовое авиационное устройство для анализа и выбора оптимальных ДКМ-радиоканалов с использованием линейно-частотно-модулированных (ЛЧМ) сигналов, содержащее GPS/ГЛОНАСС приемник с антенной, приемное устройство с приемной антенной, предназначенной для приема ЛЧМ сигналов от наземных станций, отличающееся тем, что в него дополнительно включен вычислитель, предназначенный для выбора наилучших рабочих частот и направлений путем обработки потоков данных, содержащих разностные квадратурные сигналы, принятые от четырех некоррелированных наземных зондирующих передатчиков, а приемное устройство представляет собой четырехканальное приемное устройство, включающее устройство управления и точного времени и последовательно соединенные с приемной антенной фильтр низких частот, управляемый усилитель высокой частоты (УВЧ), аналого-цифровой преобразователь (АЦП) и четырехканальный приемный процессор, при этом первый выход четырехканального приемного процессора подключен к первому входу вычислителя, а второй выход подключен к управляемому усилителю высокой частоты (УВЧ), первый выход GPS/ГЛОНАСС приемника подключен ко второму входу вычислителя, а второй выход GPS/ГЛОНАСС приемника подключен к входу данных о мировом времени устройства управления и точного времени, вход информации о параметрах принимаемого ЛЧМ сигнала которого подключен к первому выходу вычислителя, а со второго выхода вычислителя данные об оптимальном ДКМ-радиоканале передаются в бортовой комплекс средств связи (БКСС) ЛА.
2. Устройство по п. 1, отличающееся тем, что четырехканальный приемный процессор включает в себя четыре одинаковых блока основной селекции и получения низкочастотных квадратур принятого сигнала, входы данных которых подключены к выходу АЦП, блок интерфейса связи с вычислителем, входы которого подключены к выходам блоков основной селекции и получения низкочастотных квадратур принятого сигнала, блок интерфейса связи с устройством управления и точного времени, вход которого подключен к выходу устройства управления и точного времени, а выходы его подключены к входам блоков основной селекции и получения низкочастотных квадратур принятого сигнала, и блок управления входными цепями, входы которого подключены к выходам блоков основной селекции и получения низкочастотных квадратур принятого сигнала и к выходу индикатора перегрузки АЦП, а выход блока управления входными цепями подключен к управляющему входу УВЧ.
3. Устройство по п. 2, отличающееся тем, что каждый блок основной селекции и получения низкочастотных квадратур принятого сигнала содержит цифровой управляемый ЛЧМ генератор, управляющий вход которого подключен к соответствующему выходу блока интерфейса связи с устройством управления и точного времени, два перемножителя преобразователя частоты, первые входы которых подключены к соответствующим выходам синусоидального сигнала цифрового управляемого ЛЧМ генератора, а вторые входы подключены к выходу АЦП, два блока предварительной фильтрации и децимации, вход каждого из которых подключен к выходу соответствующего перемножителя преобразователя частоты, два блока основной фильтрации и окончательной децимации, вход каждого из которых подключен к выходу соответствующего блока предварительной фильтрации и децимаци, два перемножителя системы регулировки усиления, первый вход каждого из которых подключен к выходу соответствующего блока основной фильтрации и окончательной децимации, а второй вход каждого перемножителя системы регулировки усиления подключен к первому выходу блока регулировки усиления, выходы перемножителей системы регулировки усиления являются выходами блока основной селекции и получения низкочастотных квадратур принятого сигнала, через которые он подключен к соответствующим входам блока интерфейса связи с вычислителем, блок получения амплитуды сигнала, первый и второй входы которого подключены соответственно к выходам перемножителей системы регулировки усиления, вход блока регулировки усиления подключен к выходу блока получения амплитуды сигнала, второй выход - к блоку управления входными цепями приемника, а третий выход блока регулировки усиления подключен к соответствующему входу блока интерфейса связи с вычислителем.
4. Устройство по п. 1, отличающееся тем, что вычислитель включает в себя блок интерфейса связи с приемным процессором, выходы которого подключены к входам блоков выбора наилучших частот по направлению, блок окончательного решения, входы которого подключены к выходам блоков выбора наилучших частот по направлению, блок задания расписаний работ, второй выход которого подключен к блоку окончательного решения, через вход блока задания расписаний работ вычислитель подключен к первому выходу GPS/ГЛОНАСС приемника, через первый выход блока задания расписаний работ вычислитель подключен к входу данных о мировом времени устройства управления и точного времени, а выход блока окончательного решения является выходом вычислителя, с которого данные об оптимальном ДКМ-радиоканале передаются в бортовой комплекс средств связи (БКСС) ЛА.
5. Устройство по п. 4, отличающееся тем, что каждый блок выбора наилучших частот по направлению включает в себя блок предварительной обработки и нахождения частотных участков спектра с лучшим прохождением, вход которого подключен к соответствующему выходу блока интерфейса связи с приемным процессором, блок нахождения частот свободных от помех и формирования таблицы контролируемых частот, вход которого подключен к выходу блока предварительной обработки и нахождения частотных участков с лучшим прохождением, и блок нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит, вход которого подключен к выходу блока нахождения частот свободных от помех и формирования таблицы контролируемых частот, при этом выходы каждого из блоков нахождения частот с наибольшей надежностью связи при заданной вероятности ошибки на бит, содержащихся в блоках выбора наилучших частот по направлению, подключены к соответствующим входам блока окончательного решения.
| СПОСОБ АНТИМИКРОБНОЙ ОБРАБОТКИ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2316989C2 |
| КОМБИНИРОВАННАЯ БЛЕСНА "ЗМЕЙКА" | 2003 |
|
RU2253971C2 |
| 0 |
|
SU155245A1 | |
| Способ качественного и количественного определения катионов алюминия, галлия, циркония, тория, олова, бериллия, индия и урана | 1958 |
|
SU114463A1 |
| КОМБИНИРОВАННАЯ БЛЕСНА "ЗМЕЙКА" | 2003 |
|
RU2253971C2 |

