Изобретение относится к измерительной технике, в частности к способам измерения пройденного расстояния наземным транспортным средством с использованием эффекта Доплера для электромагнитных волн.
В настоящее время известны бесконтактные радиоволновые способы измерения путевой скорости и, соответственно, пройденного расстояния, основанные на эффекте Доплера (Викторов В.А., Лункин Б.В., Совлуков А.С. Радиоволновые измерения параметров технологических процессов. М.: Энергоатомиздат, 1989. 124-132 с). В отличие от способов, определяющих расстояние по числу оборотов колеса, радиоволновые доплеровские способы измерения позволяют определять истинную путевую скорость и расстояние, как результат интегрирования скорости по времени, которое не зависит от скольжения, движения при повороте и пробуксовывании, поскольку измерение производится бесконтактно. Эта информация о реальном перемещении относительно поверхности очень важна для правильной оценки пройденного пути, которая может быть использована в позиционировании транспортного средства при отсутствии сигналов спутниковой навигации. Обычно при реализации способа СВЧ радиоволны с частотой ƒ0 излучаются вперед и под углом α по направлению движения транспортного средства. Отраженные от поверхности дороги электромагнитные волны принимаются или этой же антенной или другой приемной антенной. Затем эти волны смешивают в смесителе с частью излучаемых волн и выделяют сигнал разностной частоты. Частота отраженных волн в процессе движения транспортного средства, поступающая на смеситель, будет отличаться от излучаемой частоты СВЧ волн на доплеровскую частоту ƒD. Эту частоту, пропорциональную скорости движения будет иметь сигнал, выделяемый на смесителе:

где λ0 = с/ƒ0 - длина излучаемой электромагнитной волны, c - скорость света в воздухе. Отсюда скорость можно вычислить из уравнения:

Поскольку при движении скорость постоянно меняется, то пройденное расстояние L за время Т, будет определяться интегралом от мгновенной скорости или доплеровской частоты по времени:

То есть фактически в идеальном случае требуется точное измерение мгновенной доплеровской частоты.
Обычно ƒD определяют по максимуму спектральной плотности доплеровского сигнала, что в условиях движения объекта не может гарантировать точной оценки его скорости и перемещения. Реальная антенна не излучает одну волну прямолинейно, а имеет некоторую диаграмму направленности с шириной главного лепестка θ, отраженная волна будет выглядеть не одной гармоникой, а суперпозицией волн, падающих и отраженных с разными углами α-θ/2≤αi≤α+θ/2 от подстилающей поверхности ΔƒD. Функцию распределения энергии отраженной волны от угла α можно выразить через уравнение радиолокации:

В этой формуле α - угол наклона относительно горизонтальной поверхности, θс - угол направления центра диаграммы направленности антенны (ДНА), A(α) - функция распределения ДНА, R(α)=H/sin(α) - расстояние от фазового центра антенны до точки отражения, Н - высота расположения антенны над поверхностью (см. Фиг. 1). K - константа, определяемая системными параметрами, σ(α) - функция эффективной отражающей поверхности дороги. A(α) имеет максимум при условии равенства α=θс и симметрична относительно θc. σ(α) имеет тенденцию к увеличению с увеличением угла α, в соответствии с ДНА. Если выполнить подстановку значения α=arccos(λ0ƒD/2V) из (1) в E(α) согласно уравнению (3), получим выражение для спектральной плотности доплеровского сигнала S для данной скорости:

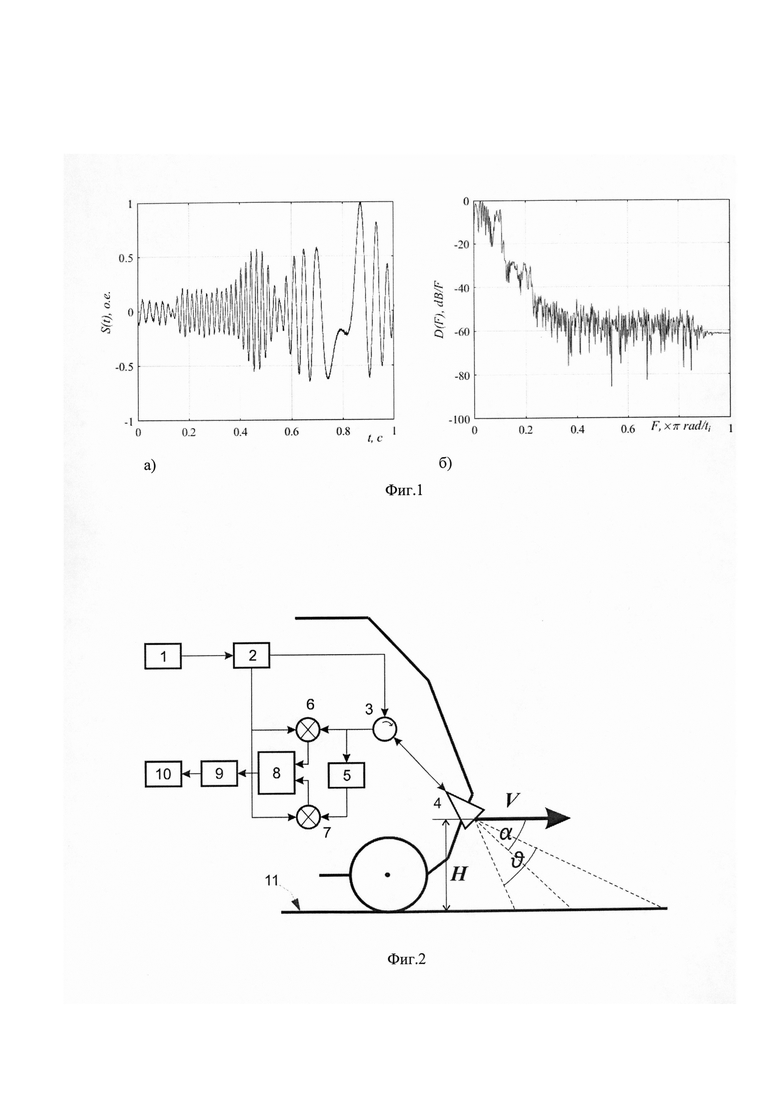
В результате имеет место принципиальное смещение между максимумом спектральной плотности и собственно доплеровской частотой ƒD. Кроме этого сам доплеровский сигнал будет иметь существенную стохастическую составляющую из-за случайного характера распределения отражающих свойств по площади отражающей поверхности, а также влияния вибрации и неровностей дороги. Также следует отметить, что вычисление спектра требует времени для накопления данных, что приводит к дискретному измерению скорости. За время записи доплеровского сигнала скорость может меняться. В результате влияния всех этих факторов, доплеровский сигнал будет постоянно меняться по частоте и амплитуде, поэтому результат измерения будет неточным. На Фиг. 1а представлена реальная запись доплеровского сигнала за время Т=1 сек. в относительных единицах и на Фиг. 1б его периодограмма спектральной плотности в нормализованном виде по частотам F=π/ts, где ts - время выборки. Из спектра сигнала видно, что точно определить максимум распределения спектральной плотности за время записи сигнала невозможно, да и сам этот максимум не соответствует точно доплеровской частоте, по которой можно вычислить скорость и соответственно пройденный путь.
С другой стороны для целей позиционирования можно в принципе обойтись без измерения мгновенной частоты, а измерять пройденный путь, подсчитывая число полупериодов текущей доплеровской частоты - n. Тогда пройденное расстояние можно определить по формуле:

Погрешность измерения в этом случае соответствует полуволне излучаемого колебания поделенной на косинус угла α. При этом в процессе вычисления пути уже нет необходимости в измерении мгновенной доплеровской частоты с последующим интегрированием.
Наиболее близким по технической сущности является способ измерения путевой скорости (М.И. Финкельштейн. Основы радиолокации. М., Советское радио. 1973, с. 85), принятый за прототип. Электромагнитные колебания фиксированной частоты от генератора СВЧ излучаются под углом α между направлением движения и подстилающей поверхностью. Отраженные волны принимаются антенной и смешиваются с частью излучаемых электромагнитных колебаний. В результате выделяется доплеровский сигнал, путевая скорость вычисляется по частоте доплеровского сигнала, а пройденный путь определяется по интегрированию этой частоты по времени.
Недостатком способа являются значительные ошибки в определении путевой скорости, обусловленные измерением доплеровской частоты по максимуму спектральной плотности доплеровского сигнала и дискретным характером измерения. В результате пройденный путь также будет вычислен не точно. Для использования в навигационных системах, системах безопасности и для экономии расхода топлива требуется точное измерение пройденного пути. Для этого необходимо его прямое измерение, например путем подсчета числа периодов сигнала доплеровской частоты. Однако сложный спектральный состав этого сигнала не позволяет сделать это с достаточной точностью.
Техническим результатом настоящего изобретения является повышение точности измерения пройденного пути наземного транспортного средства.
Технический результат достигается тем, что в способе измерения пройденного пути, заключающимся в том, что электромагнитные волны с длиной волны λ0 излучают вперед под углом α по направлению движения транспортного средства, принимают отраженные от поверхности дороги электромагнитные волны, затем эти волны смешивают в первом смесителе с частью излучаемых волн и выделяют первый сигнал разностной частоты. Дополнительно к этому отраженные волны пропускают через линию задержки длиной в четверть длины волны электромагнитного колебания, смешивают их на втором смесителе с частью излучаемых волн и выделяют второй сигнал разностной частоты, в моменты совпадения этих сигналов формируют импульсы, по количеству этих импульсов n вычисляют пройденный путь по формуле L=nλ0/2cos(α).
На Фиг. 1а представлен реальный доплеровский сигнал в течение 1 сек., а на Фиг. 1б его периодограмма спектральной плотности в нормализованном виде.
На Фиг. 2 представлена структурная схема устройства, реализующего способ.
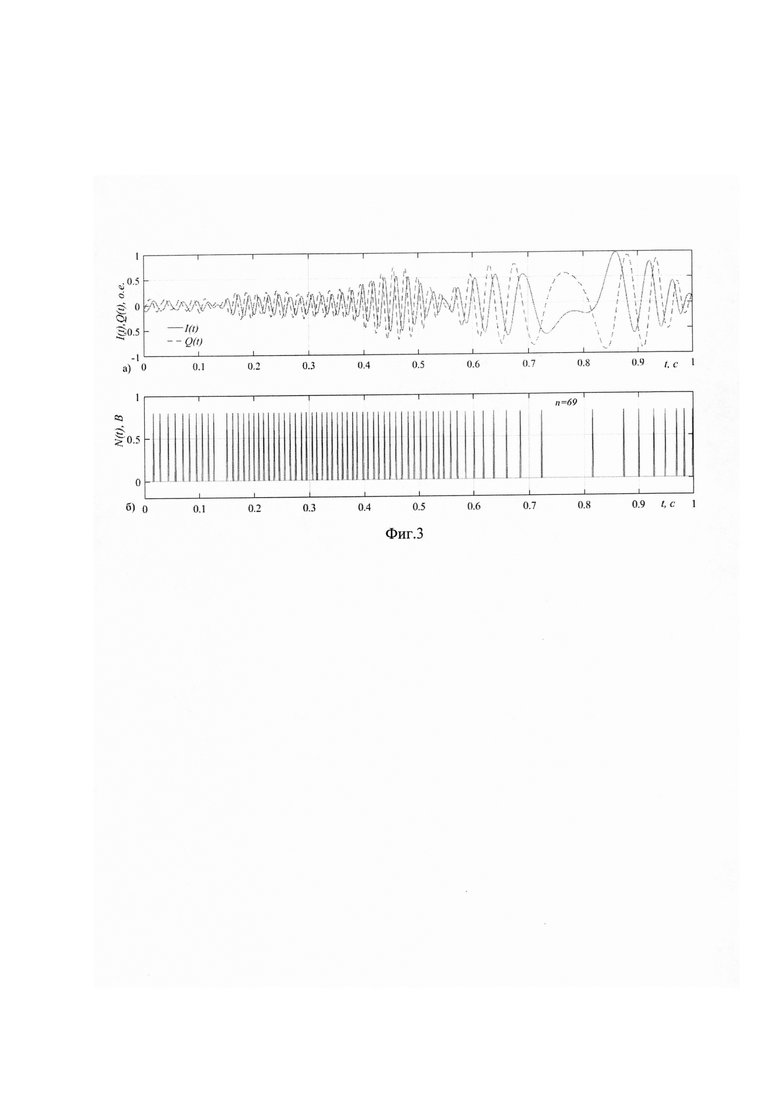
На Фиг. 3 изображены временные диаграммы сигналов на выходах первого и второго смесителя I(t) и Q(t), а также импульсы на выходе компаратора.
Устройство, реализующее способ расположено на транспортном средстве и содержит генератор СВЧ 1, направленный ответвитель 2, циркулятор 3, антенну 4, линия задержки на λ0/4 - 5, первый смеситель 6, второй смеситель 7, компаратор 8, счетчик импульсов 9, вычислительный блок 10 (см. Фиг. 2). Антенна ориентирована под углом α между направлением движения и подстилающей поверхностью 11.
Устройство работает следующим образом. От генератора СВЧ сигнал с частотой ƒ0 поступает через основной вывод направленного ответвителя и циркулятор на антенну и излучается в сторону подстилающей поверхности. При этом часть сигнала через вспомогательный вывод направленного ответвителя поступает на первые входы двух смесителей, а на вторые его входы поступает СВЧ сигнал, отраженный от поверхности обратно в антенну и прошедший через циркулятор. Однако, если на первый смеситель он приходит напрямую, то на второй вход - после задержки на λ0/4, что соответствует сдвигу по фазе на угол 90°. В результате на выходе первого и второго смесителя образуются доплеровские сигналы I(t) и Q(t), также сдвинутые между собой по фазе на 90° (см. фиг. 3). Затем сигналы I(t) и Q(t) подаются на входы компаратора, на выходе которого формируются короткие импульсы в моменты совпадения сигналов. Далее эти импульсы подсчитываются счетчиком, а пройденный путь определяется в вычислительном блоке по формуле (5).
Поскольку форма сигнала Q(t), сдвинутого по фазе на 90° относительно сигнала I(t), изменяющегося как по частоте, так и по амплитуде одинакова, то ошибка, вызванная неточностью подсчетов числа периодов сигнала доплеровской частоты, устраняется, а точность определения пути увеличивается. При этом ошибка измерения будет постоянной и равной полуволне электромагнитного колебания, деленной на косинус угла α. При этом фактически измеряется мгновенная доплеровская частота с максимально возможной точностью без вычисления спектра и с максимально возможным быстродействием.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОЙДЕННОГО ПУТИ | 2018 |
|
RU2690842C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2018 |
|
RU2683578C1 |
| РАДИОВОЛНОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2017 |
|
RU2663215C1 |
| ДОПЛЕРОВСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2016 |
|
RU2611601C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2686676C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ | 2017 |
|
RU2669016C2 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ | 2016 |
|
RU2611440C1 |
| ИЗМЕРИТЕЛЬ ВЕКТОРА ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2703281C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ЖИДКИХ СРЕД | 2015 |
|
RU2597666C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ЖИДКИХ СРЕД | 2016 |
|
RU2620779C1 |
Изобретение относится к измерительной технике, в частности к радиоволновым способам измерения путевой скорости транспортных средств с использованием эффекта Доплера для электромагнитных волн. Технический результат - повышение точности измерения пройденного пути транспортного средства. Указанный результат достигается тем, что в способе измерения пройденного пути, заключающемся в том, что электромагнитные волны с длиной волны λ0 излучают вперед под углом α по направлению движения транспортного средства, принимают отраженные от поверхности дороги электромагнитные волны, затем эти волны смешивают в первом смесителе с частью излучаемых волн и выделяют первый сигнал разностной частоты. Дополнительно к этому отраженные волны пропускают через линию задержки длиной в четверть длины волны электромагнитного колебания, смешивают их на втором смесителе с частью излучаемых волн и выделяют второй сигнал разностной частоты, в моменты совпадения этих сигналов формируют импульсы, по количеству этих импульсов n вычисляют пройденный путь по формуле L=nλ0/2cos(α). 3 ил.
Бесконтактный способ измерения пройденного пути, заключающийся в том, что электромагнитные волны с длиной волны λ0 излучают вперед под углом α по направлению движения транспортного средства, принимают отраженные от поверхности дороги электромагнитные волны, затем эти волны смешивают в первом смесителе с частью излучаемых волн и выделяют первый сигнал разностной частоты, отличающийся тем, что отраженные волны пропускают через линию задержки длиной в четверть длины волны электромагнитного колебания, смешивают их на втором смесителе с частью излучаемых волн и выделяют второй сигнал разностной частоты, в моменты совпадения этих сигналов формируют импульсы, по количеству этих импульсов n вычисляют пройденный путь по формуле L=nλ0/2cos(α).
| ФИНКЕЛЬШТЕЙН М.И | |||
| Основы радиолокации | |||
| Москва, Советское радио, 1973, с.85 | |||
| RU 94037470 A1, 10.09.1996 | |||
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗМЕРИТЕЛЬНОЙ СТАНЦИИ ДО РЕТРАНСЛЯТОРА | 2016 |
|
RU2584972C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| US 8188908 B2, 29.05.2012 | |||
| WO 2004059341 A1, 15.07.2004 | |||
| Устройство для захвата строительных элементов при извлечении из грунта | 1973 |
|
SU538096A1 |

