Изобретение относится к нефтедобывающей промышленности и может быть использовано в станциях управления штанговыми глубинно-насосными установками (ШГНУ) для определения степени уравновешенности механизма и оптимального положения противовеса на кривошипе станка-качалки.
Известны способы определения уравновешенности ШГНУ:
- Авторское свидетельство RU 2227848 (Гольдштейн Е.И., Исаченко И.Н., Полякова С.В., «Способ диагностирования уравновешенности станков-качалок штанговых насосных установок»);
- Авторское свидетельство RU 2621435 (Тимофеев А.О., Ясовеев В.Х., «Способ определения неуравновешенности станка-качалки скважинной штанговой насосной установки»).
Недостатками данных способов являются сложность проведения гармонического анализа в первом способе и необходимость использования эталонных коэффициентов, расчет которых проводится для каждой исследуемой ШГНУ.
Также известны способы определения уравновешенности ШГНУ:
- Авторское свидетельство RU 2334897 (Ушаков B.C., Демяненко Н.А., «Способ диагностирования уравновешенности привода штангового глубинного насоса»);
- Хакимьянов М.И. Удельный расход электроэнергии при механизированной добыче нефти штанговыми глубиннонасосными установками // Вестник УГАТУ. 2014. Т. 18. №. 2 (63). С. 54-60 (С. 57, Влияние сбалансированности на потребляемую мощность).
Недостатком данных способов является то, что для определения уравновешенности используются мгновенные значения мощности или скорости, а не интегральная оценка на периоде качания ШГНУ, такая, как, например, энергия. Это не позволяет получить вполне точный результат по балансировке ШГНУ с точки зрения главного критерия уравновешенности -минимума потребляемой энергии.
Общим недостатком всех указанных выше способов является то, что информация о коэффициенте уравновешенности, получаемая при этом, не содержит конкретных рекомендаций обслуживающему персоналу, куда и на сколько необходимо переместить противовес станка-качалки, поэтому требуется проводить несколько операций последовательного подбора оптимального положения.
Наиболее близким к предлагаемому способу является способ уравновешивания штанговой глубинно-насосной установки [Зюзев А.М. Развитие теории и обобщение опыта разработки автоматизированных электроприводов агрегатов нефтегазового комплекса: дис.на соиск. учен, степ, д-ра техн. наук: 05.09.03 / А.М. Зюзев; Урал. гос. техн. ун-т - УПИ. - Екатеринбург, 2004. - 347 с.: ил.; 31 см. - Прил.: с. 334-347. - Библиогр.: с. 312-333], включающий контроль скорости приводного двигателя и потребляемой электрической энергии на ходе штока ШГНУ вверх WB и вниз WH, полученной путем непрерывного измерения мгновенной мощности двигателя на временных интервалах подъема и опускания штока, остановку агрегата с перемещением грузов на кривошипе ШГНУ с повторным пуском и фиксацией значений электрической энергии WB1, WB2 и WH1, WH2, соответствующей двум различным значениям радиуса расположения противовеса R1 и R2 с последующей оценкой коэффициента уравновешенности установки KУР.
Недостатком данного способа является то, что он не обеспечивает выдачу сведений о необходимом перемещении в оптимальное положение противовеса станка-качалки в процессе балансировки механизма. Причем при обработке и восприятии информации необходимо оперировать численным значением коэффициента уравновешенности, которое может принимать отрицательные значения, что вызывает определенные трудности для эксплуатирующего персонала. Кроме того, для реализации данного способа предлагается оборудовать механизм датчиком положения или путевыми датчиками для определения моментов прохождения механизмом «мертвых точек», что усложняет конструкцию агрегата и снижает его надежность, поскольку навесные датчики на подвижной конструкции подвержены сильным внешним воздействиям.
Проблемой, которую решает изобретение, является повышение надежности ШГНУ с обеспечением контроля степени уравновешенности ШГНУ и определением оптимального положения противовеса на кривошипе станка-качалки в процессе работы агрегата без использования дополнительных навесных датчиков.
Решение указанной проблемы достигается тем, что при работе установки дополнительно непрерывно определяют сумму текущей мощности и мощности, измеренной в момент времени, предшествующий половине периода качания ШГНУ, причем период качания определяют как разность значений временных меток двух последовательных наибольших значений мгновенной мощности, а длительность временных интервалов подъема и опускания штока определяют на основе разности моментов времени прохождения «мертвых точек», которым соответствуют минимальные значения суммарной мощности, при этом путем анализа угловой скорости двигателя на соответствующем временном интервале определяют угловое перемещение вала двигателя и по результату устанавливают, что «мертвая точка» является верхней, если ее прохождению предшествует меньшее угловое перемещение вала двигателя, или нижней, если предшествует большее угловое перемещение вала двигателя; после чего находят значение коэффициента уравновешенности:
KУР=(WB/WH+1)/2*100% - при WB>WH или
KУР=(WH/WB+1)/2*100% - при WH>WB,
при этом, если значение KУР=100%, то установку считают уравновешенной, в противном случае на основе вспомогательных коэффициентов:
AB=(WB1-WB2)/(R1-R2),
АH=(WH1-WH2)/(R1-R2),
A=(AH-AB)/2
и текущего положения противовеса R и определяют его оптимальное значение :
RУР=((WB+WH)/2-(WB+A*R))/(-A)
и величину смещения противовеса:
RСМ=RУР-R,
необходимую для достижения уравновешенности ШГНУ.
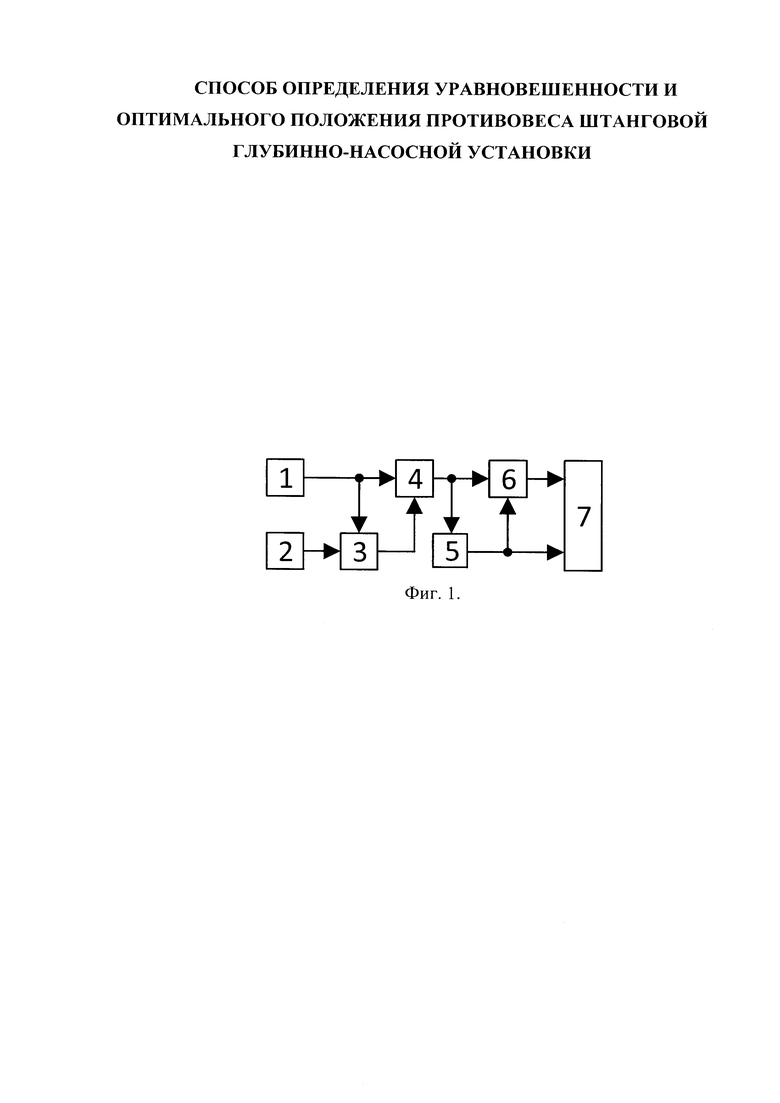
Способ поясняется чертежом на фиг. 1, где изображена функциональная схема реализации изобретения.
Схема содержит следующие элементы: 1 - блок измерения мгновенной мощности, 2 - блок измерения углового перемещения, 3 - блок контроля «мертвых точек», 4 - блок вычисления энергии, 5 - блок расчета коэффициента уравновешенности, 6 - блок расчета оптимального смещения противовеса, 7 - блок индикации.
Способ реализуется следующим образом. Блок измерения мгновенной мощности 1 формирует значение мгновенной мощности по формуле:
p(t)=ua*ia+ub*ib+uc*ic,
где ua, ub, uc - фазные напряжения приводного двигателя, ia, ib, ic - фазные токи приводного двигателя.
Вычисленное значение мгновенной мощности поступает на вход блока вычисления энергии 4, на другой вход которого с блока контроля «мертвых точек» 3 поступает сигнал о прохождении «мертвых точек», и на вход блока контроля «мертвых точек» 3, на другой вход которого с блока измерения углового перемещения 2 поступает сигнал, соответствующий угловому перемещению, вала двигателя, вычисляемому по формуле:
где ω - угловая скорость двигателя, Т - время работы.
Блок контроля «мертвых точек» 3 определяет длительность временных интервалов подъема ТB и опускания ТH штока на основе разности моментов времени прохождения «мертвых точек», которым соответствуют минимумы на диаграмме суммарной мощности, при этом если прохождению «мертвой точки» предшествует меньшее угловое перемещение вала двигателя, считают, что это «верхняя мертвая точка», а если большее - то «нижняя мертвая точка».
Блок вычисления энергии 4 проводит вычисление потребляемой приводным двигателем электрической энергии на ходе штока ШГНУ вверх WB и на ходе штока вниз WH исходя из информации о «мертвых точках» по формулам:
где ТB - время подъема штока, ТH - время опускания штока.
Вычисленное значение электрической энергии поступает на входы блока расчета коэффициента уравновешенности 5 и блока расчета оптимального смещения противовеса 6. Блок расчета коэффициента уравновешенности 5 проводит вычисление коэффициента уравновешенности по формулам:
KУР=(WB/WH+1)/2*100% при WB>WH;
KУР=(WH/WB+1)/2*100% при WH>WB.
Если значение KУР=100%, то на блок индикации 7 поступает сигнал «уравновешена», в противном случае на блок расчета оптимального смещения противовеса 6 поступает включающий сигнал.
Блок расчета оптимального смещения противовеса 6 по значениям электрической энергии WB1, WB2 и WH1, WH2, соответствующим двум различным значениям радиуса расположения противовеса R1 и R2 однократно определяет вспомогательные коэффициенты по формулам:
AB=(WB1-WB2)/(R1-R2);
АH=(WH1-WH2)/(R1-R2);
A=(AH-AB)/2,
где WB1, WH1 - значения энергии на ходе штока вверх и вниз соответственно для R1, WB2, WH2 - значения энергии на ходе штока вверх и вниз соответственно для R2.
Затем блок расчета оптимального смещения противовеса 6 для текущего положения противовеса R проводит расчет его оптимального значения:
RУР=((WB+WH)/2-(WB+A*R))/(-A),
и величину смещения противовеса:
RСМ=RУР-R,
необходимую для достижения уравновешенности ШГНУ.
Решение проблемы повышения надежности ШГНУ с обеспечением контроля уравновешенности ШГНУ и определением оптимального положения противовеса на кривошипе станка-качалки в процессе работы агрегата без использования дополнительных навесных датчиков достигается непрерывным измерением мгновенной мощности и скорости приводного двигателя с последующим выявлением моментов прохождения механизмом «мертвых точек», оценкой потребляемой энергии на ходе штока станка-качалки вверх и вниз и определением на основе полученных соотношений энергии коэффициента уравновешенности KУР и необходимой величины смещения противовеса до оптимального положения.
Изобретение относится к нефтедобывающей промышленности и может быть использовано в станциях управления штанговыми глубинно-насосными установками - ШГНУ - для определения степени уравновешенности механизма и оптимального положения противовеса на кривошипе станка-качалки. Технический результат - повышение надежности ШГНУ с обеспечением контроля степени их уравновешенности и определением оптимального положения противовеса на кривошипе станка-качалки в процессе работы агрегата без использования дополнительных навесных датчиков. Способ основан на контроле мгновенной мощности и скорости приводного двигателя ШГНУ с последующим выявлением моментов прохождения механизмом «мертвых точек». По способу осуществляют оценку потребляемой энергии на ходе штока станка-качалки вверх и вниз. На основе полученных соотношений энергии определяют коэффициент уравновешенности. В том случае, если его значение отлично от 100%, установку считают неуравновешенной и по полученным значениям энергии определяют необходимую величину смещения противовеса до оптимального положения. 1 ил.
Способ определения уравновешенности и оптимального положения противовеса штанговой глубинной насосной установки, включающий контроль скорости приводного двигателя и потребляемой электрической энергии на ходе штока штанговой глубинной насосной установки - ШГНУ - вверх WB и вниз WH, полученной путем непрерывного измерения мгновенной мощности двигателя на временных интервалах подъема и опускания штока, остановку агрегата с перемещением грузов на кривошипе ШГНУ с повторным пуском и фиксацией значений электрической энергии WB1, WB2 и WH1, WH2, соответствующей двум различным значениям радиуса расположения противовеса R1 и R2, с последующей оценкой коэффициента уравновешенности установки KУР, отличающийся тем, что дополнительно непрерывно определяют сумму текущей мощности и мощности, измеренной в момент времени, предшествующий половине периода качания ШГНУ, причем период качания определяют как разность значений временных меток двух последовательных наибольших значений мгновенной мощности, а длительность временных интервалов подъема и опускания штока определяют на основе разности моментов времени прохождения «мертвых точек», которым соответствуют минимальные значения суммарной мощности, при этом путем анализа угловой скорости двигателя на соответствующем временном интервале определяют угловое перемещение вала двигателя и по результату устанавливают, что «мертвая точка» является верхней, если ее прохождению предшествует меньшее угловое перемещение вала двигателя, или нижней, если предшествует большее угловое перемещение вала двигателя; после чего находят значение коэффициента уравновешенности:
KУР=(WB/WH+1)/2*100% - при WB≤WH или
KУР=(WH/WB+1)/2*100% - при WH<WB,
при этом если значение KУР=100%, то установку считают уравновешенной, в противном случае при KУР<100% на основе вспомогательных коэффициентов:
AB=(WB1-WB2)/(R1-R2),
AH=(WH1-WH2)/(R1-R2),
A=(AH-AB)/2
и текущего положения противовеса R определяют его оптимальное значение:
RУР=((WB+WH)/2 - (WB+A*R))/(-A)
и величину смещения противовеса:
RCM=RУР - R,
необходимую для достижения уравновешенности ШГНУ.
| ЗЮЗЕВ А.М | |||
| Развитие теории и обобщение опыта разработки автоматизированных электроприводов агрегатов нефтегазового комплекса, дис | |||
| на соиск | |||
| учен | |||
| степ | |||
| д-ра техн | |||
| наук, Урал | |||
| гос | |||
| техн | |||
| ун-т, Екатеринбург, 2004, с | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2227848C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ ПРИВОДА ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2007 |
|
RU2334897C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2210004C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ СТАНКОВ-КАЧАЛОК ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 1995 |
|
RU2129666C1 |
| US 5006044 A1, 09.04.1991. | |||

