Область техники, которой относится изобретение
Настоящее раскрытие относится к устройству управления связью, способу управления связью и программе.
Уровень техники
В последние годы системы радиосвязи для передачи информации посредством радиосвязи используются в различных ситуациях. Система радиосвязи содержит, например, сотовую систему, спутниковую широковещательную систему, систему беспроводной локальной сети (LAN), телевизионную широковещательную сеть и т. п. В таких системах радиосвязи существует случай, при котором в ситуации, когда используемые полосы частот перекрываются друг с другом, радиопередачи создают взаимные помехи друг другу. Поэтому желательно обеспечить технологию, позволяющую избежать взаимодействия различных систем радиосвязи между собой.
Например, в приведенной ниже патентной литературе 1 раскрывается технология, позволяющая первичной системе избегать пагубного взаимодействия в случае, когда существует множество вторичных систем, вторично использующих ее полосу частот.
Перечень литературы
Патентная литература
Патентная литература 1: JP 2012-151 815A
Раскрытие сущности изобретения
Техническая проблема
В наше время, поскольку системы радиосвязи получают широкое распространение и используются более часто, желательно дополнительно улучшить технологию, позволяющую избегать помех между системами радиосвязи. Поэтому, настоящее раскрытие предлагает новое и улучшенное устройство связи, способ управления связью и программу, способные уменьшить помехи, возникающие между различными системами радиосвязи.
Решение задачи
В соответствии с настоящим раскрытием, обеспечивается устройство управления связью, содержащее блок связи, выполненный с возможностью осуществления связи с устройством, принадлежащим к первой радиосети, и блок управления, выполненный с возможностью управления выполнением устройством радиосвязи, принадлежащим к первой радиосети, скачкообразной перестройки частоты, основываясь на информации второй радиосети, отличной от первой радиосети.
В соответствии с настоящим раскрытием, обеспечивается устройство управления связью, содержащее блок связи, выполненный с возможностью осуществления связи с устройством, принадлежащим к первой радиосети, и блок управления, выполненный с возможностью управления выполнением устройством радиосвязи, принадлежащим к первой радиосети, скачкообразной перестройки частоты, основываясь на информации второй радиосети, отличной от первой радиосети.
В соответствии с настоящим раскрытием, обеспечивается программа, вызывающая функционирование компьютера в качестве блока связи, выполненного с возможностью осуществления связи с устройством, принадлежащим к первой радиосети; и блока управления, выполненного с возможностью управления тем, может ли устройство радиосвязи, принадлежащее к первой радиосети, выполнять скачкообразную перестройку частоты, основываясь на информации второй радиосети, отличной от первой радиосети.
Предпочтительные результаты изобретения
Как описано выше, в соответствии с настоящим раскрытием можно уменьшить взаимные помехи, создаваемые между различными системами радиосвязи. Заметим, что описанные выше результаты не обязательно являются ограничивающими. Вместе с перечисленными выше результатами или взамен их могут быть достигнуты любые другие результаты, представленные в настоящем описании, или другие результаты, которые могут быть получены, исходя из настоящего описания.
Краткое описание чертежей
Фиг. 1 - общее представление системы связи, соответствующей варианту осуществления настоящего раскрытия.
Фиг. 2 - пример логической конфигурации приемной станции, соответствующей настоящему варианту осуществления.
Фиг. 3 - пример логической конфигурации передающей станции, соответствующей настоящему варианту осуществления.
Фиг. 4 - пример шаблона скачкообразной перестройки частоты в системе радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления.
Фиг. 5 - пример шаблона скачкообразной перестройки частоты в системе радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления.
Фиг. 6 - пример шаблона скачкообразной перестройки частоты для объяснения скачкообразной перестройки частоты в системе радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления.
Фиг. 7 - пример логической конфигурации передающей станции, соответствующей настоящему варианту осуществления.
Фиг. 8 - пример функциональной конфигурации блока связи передающей станции, соответствующей настоящему варианту осуществления.
Фиг. 9 - пример функциональной конфигурации блока связи передающей станции, соответствующей настоящему варианту осуществления.
Фиг. 10 - пример функциональной конфигурации блока связи передающей станции, соответствующей настоящему варианту осуществления.
Фиг. 11 - пример взаимодействия между каналом управления и каналом данных в процессе сообщения установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления.
Фиг. 12 - пример взаимодействия между каналом управления и каналом данных в процессе сообщения информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления.
Фиг. 13 - пример взаимодействия между каналом управления и каналом данных в процессе сообщения информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления.
Фиг. 14 - пример взаимодействия между участком заголовка и участком данных в процессе сообщения информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления.
Фиг. 15 - пример процесса сообщения информации установки скачкообразной перестройки частоты, соответствующего настоящему варианту осуществления.
Фиг. 16 - пример процесса сообщения информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления.
Фиг. 17 - взаимодействие между средством сообщения информации установки скачкообразной перестройки частоты и каналами в соответствии с настоящим вариантом осуществления.
Фиг. 18 - пример логической конфигурации устройства управления связью, соответствующего настоящему варианту осуществления.
Фиг. 19 - пример приоритета систем радиосвязи в настоящем варианте осуществления.
Фиг. 20 - пример приоритета систем радиосвязи в настоящем варианте осуществления.
Фиг. 21 - пример приоритета систем радиосвязи в настоящем варианте осуществления.
Фиг. 22 - пример приоритета систем радиосвязи в настоящем варианте осуществления.
Фиг. 23 – временное изменение системой радиосвязи используемых полос частот в соответствии с настоящим вариантом осуществления.
Фиг. 24- пример вычисления соотношения перекрытия используемых полос частот.
Фиг. 25- пример вычисления соотношения перекрытия используемых полос частот.
Фиг. 26- пример вычисления соотношения перекрытия используемых полос частот.
Фиг. 27- пример вычисления соотношения перекрытия используемых полос частот.
Фиг. 28 - пример шаблона скачкообразной перестройки частоты в системе радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления.
Фиг. 29 - пример шаблона скачкообразной перестройки частоты в системе радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления.
Фиг. 30 – пример, в котором используемые полосы частот двух систем радиосвязи частично перекрываются друг с другом.
Фиг. 31 – пример, в котором используемые полосы частот двух систем радиосвязи частично перекрываются друг с другом.
Фиг. 32 - пример логической конфигурации DB, соответствующей настоящему варианту осуществления.
Фиг. 33 – блок-схема примера логической конфигурации устройства датчика, соответствующего настоящему варианту осуществления.
Фиг. 34 - пример процесса прохождения управления системой радиосвязи, выполняемого в системе связи, соответствующей настоящему варианту осуществления.
Фиг. 35 - пример процесса прохождения управления системой радиосвязи, выполняемого в системе связи, соответствующей настоящему варианту осуществления.
Фиг. 36 – блок-схема последовательности выполнения операций примерного процесса принятия решения о рабочем режиме, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 37 – блок-схема последовательности выполнения операций примерного процесса принятия решения о рабочем режиме, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 38 – блок-схема последовательности выполнения операций примерного процесса принятия решения о рабочем режиме, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 39 – блок-схема последовательности выполнения операций примерного процесса принятия решения о рабочем режиме, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 40 – блок-схема последовательности выполнения операций примерного процесса принятия решения о рабочем режиме, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 41 – блок-схема последовательности выполнения операций примерного процесса вычисления соотношения перекрытия используемых полос частот, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 42 – блок-схема последовательности выполнения операций примерного процесса принятия решения о рабочем режиме, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 43 – блок-схема последовательности выполнения операций примерного процесса получения сетевой информации, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 44 – блок-схема последовательности выполнения операций примерного процесса определения помехи, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 45 – блок-схема последовательности выполнения операций примерного процесса определения перекрытия используемых полос частот, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 46 – блок-схема последовательности выполнения операций примерного процесса определения перекрытия используемых полос частот, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 47 – блок-схема последовательности выполнения операций примерного процесса определения перекрытия полос используемых частот, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 48 – блок-схема последовательности выполнения операций примерного процесса определения временного изменения используемых полос частот, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 49 – блок-схема последовательности выполнения операций примерного процесса определения временного изменения используемых полос частот, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 50 – блок-схема последовательности выполнения операций примерного процесса принятия решения об информации установки скачкообразной перестройки частоты, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 51 – блок-схема последовательности выполнения операций примерного процесса принятия решения об информации установки скачкообразной перестройки частоты, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 52 – блок-схема последовательности выполнения операций примерного процесса принятия решения о шаблоне скачкообразной перестройки частоты, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 53 - пример процесса прохождения процесса записи регистрационной информации DB, выполняемого в системе связи, соответствующей настоящему варианту осуществления.
Фиг. 54 – блок-схема последовательности выполнения операций примерного процесса передачи информации, указывающей шаблон скачкообразной перестройки частоты, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 55 – блок-схема последовательности выполнения операций примерного процесса переключения настройки передачи, выполняемого устройством управления связью, соответствующим настоящему варианту осуществления.
Фиг. 56 – блок схема примера схематической конфигурации сервера.
Фиг. 57 – блок схема первого примера схематической конфигурации eNB.
Фиг. 58 – блок схема второго примера схематической конфигурации eNB.
Фиг. 59 – блок схема примера схематической конфигурации смартфона.
Фиг. 60 – блок схема примера схематической конфигурации автомобильного навигационного устройства.
Осуществление изобретения
Здесь далее предпочтительные варианты осуществления настоящего раскрытия будут описаны подробно со ссылкой на приложенные чертежи. В настоящем описании и на приложенных чертежах элементы структуры, обладающие, по существу, одной и той же функцией и структурой, обозначаются одними и теми же ссылочными позициями и повторное объяснение таких элементов структуры не приводится.
Кроме того, в настоящем описании и на приложенных чертежах элементы, обладающие, по существу, одной и той же функцией и структурой, могут в некоторых случаях различаться буквами, присоединенными к одной и той же позиции. Например, многочисленные элементы, обладающие, по существу, одной и той же функцией и структурой, различаются как приемные станции 100А, 100В и 100С и т. д., в зависимости от необходимости. С другой стороны, когда не существует особого различия между многочисленными элементами, обладающими, по существу, одной и той же функцией и структурой, будет указываться одна и та же позиция. Например, приемные станции 100A, 100B, 100C будут обозначаться просто как приемная станция 100, когда не имеют особого различия.
Заметим, что описание будет представлено в следующем порядке.
1. Общее представление
2. Пример конфигурации
2-1. Приемная станция
2-2. Передающая станция
2-3. Устройство управления связью
2-4. DB
2-5. Устройства датчика
3. Порядок работы
3-1. Процесс управления системой радиосвязи
3-2. Процесс принятия решения о рабочем режиме
3-3. Процесс получения сетевой информации
3-4. Процесс определения взаимных помех
3-5. Процесс определения перекрытия используемых полос частот
3-6. Процесс определения временного изменения используемых полос частот
3-7. Процесс принятия решения об установке скачкообразной перестройки частоты
3-8. Процесс записи регистрационной информации DB
3-9. Процесс переключения настройки передачи
4. Примеры применения
5. Заключение
1. Общее представление
На фиг. 1 представлен пример, поясняющий общую структуру системы связи, соответствующей варианту осуществления настоящего раскрытия. Как показано на фиг. 1, система 1 связи, соответствующая настоящему варианту осуществления, содержит множество систем 10 радиосвязи.
Каждая система 10 радиосвязи содержит одну или более приемных станций 100 и одну или более передающих станций 200. Приемная станция 100 является устройством радиосвязи, принимающим данные, переданные передающей станцией 200. Более точно, приемная станция 100 является устройством радиосвязи, принимающим данные, переданные передающей станцией 200 в то время, когда выполняется скачкообразная перестройка частоты. Например, приемная станция 100 является терминалом пользователя (оборудованием пользователя (UE)) в сотовой системе, устройством клиента в системе беспроводной LAN или телевизионным приемником в наземной широковещательной системе или в спутниковой широковещательной системе. Передающая станция 200 является устройством, передающим данные приемной станции 100. Более точно, передающая станция 200 является устройством, передающим данные приемной станции 100 в то время, когда выполняется скачкообразная перестройка частоты. Например, передающая станция 200 является базовой станцией (развернутым узлом В (evolutional Node B (eNB)) в сотовой системе, базовой станцией (точкой доступа) в системе беспроводной LAN, вышкой в наземной широковещательной системе или спутником в спутниковой широковещательной системе. Заметим, что существует случай, в котором, когда одно устройство функционирует как приемная станция 100 или передающая станция 200, или случай, когда одно устройство функционирует одновременно как приемная станция 100 и передающая станция 200. Например, UE может функционировать как приемная станция 100, принимающая данные от eNB по нисходящему каналу, и может функционировать как передающая станция 200, передающая данные к eNB по восходящему каналу.
Здесь, как показано на фиг. 1, система 1 связи, соответствующая настоящему варианту осуществления, содержит множество различных систем 10 радиосвязи.
Например, система 10А радиосвязи является сотовой системой, содержащей схему связи LTE, LTE-Advanced или эквивалентные им. Система 10A радиосвязи содержит одну или более приемных станций 100 (то есть, приемную станцию 100A и приемную станцию 100B), передающую станцию 200A и базовую сеть 600. В примере, показанном на фиг. 1, приемные станции 100A и 100b являются UE и передающая станция 200 является eNB. Между UE 100 и eNB 200 может иметься ретрансляторный узел или базовая станция малых ячеек (в том числе, фемтоячеек, наноячеек, пикоячеек, микроячеек и т. д.). Дополнительно, eNB 200 может функционировать как базовая станция макроячейки и UE 100 может функционировать как базовая станция малой ячейки. Базовая сеть 600 может содержать узел связи, такой как роутер, объект управления мобильностью (mobility management entity, MME), сервисный шлюз (S-GW), сетевой шлюз пакетных данных (P-GW), функцию политики и правил заряда (policy and charging rule function, PCRF) и шлюз домашней eNodeB (home eNodeB gateway, HeNB-GW). Заметим, что в отличие от примера, показанного на фиг. 1, UE может функционировать как передающая станция 200 и eNB может функционировать как приемная станция 100.
Например, система 10В радиосвязи является спутниковой широковещательной системой. Система 10B радиосвязи содержит одну или более приемных станций 100 (то есть, приемную станцию 100С и приемную станцию 100D) и передающую станцию 200B. В примере, показанном на фиг. 1, приемные станции 100CA и 100D являются телевизионными приемниками и передающая станция 200 является спутником. Заметим, что в отличие от примера, показанного на фиг. 1, телевизионный приемник может функционировать как передающая станция 200 и спутник может функционировать как приемная станция 100.
Кроме примеров, показанных на фиг. 1, система 1 связи может быть произвольной системой радиосвязи, такой как, например, система беспроводной LAN, телевизионная широковещательная система (наземного вещания), радиовещательная система и радиолокационная система.
Возможен случай, когда в системе связи 1 среди множества систем 10 радиосвязи используемые полосы частот перекрываются друг с другом. Перекрытие полос частот может происходить, например, когда, как в случае незанятого телевидением участка спектра, полоса частот, выделенная телевизионной вещательной станции вторично используется другой системой 10 радиосвязи с низким приоритетом. Вторичное использование частоты относится к вторичному использованию части или всех частотных каналов, предпочтительно выделенных одной системе другой системой. Как правило, система, которой предпочтительно выделен частотный канал, упоминается как первичная система, и система, вторично использующая частотный канал, упоминается как вторичная система. Вторичное использование частоты рассматривается как одна из мер по смягчению истощения частотных ресурсов в будущем.
В качестве другого примера такого обсуждения, в США исследовалась работа с совместным использованием одной и той же полосы частот множеством систем радиосвязи, имеющих различный приоритет (также упоминаемый как уровень (Tier)). Например, в исследовании Федеральной комиссии связи США "GN Docket No. 12-354 NOTICE OF PROPOSED RULEMAKING AND ORDER", декабрь 2012 г., частота 3,5 ГГц, которая используется нефедеральной службой спутниковой связи с закреплением каналов и радиолокационными станциями Министерства обороны, предложена в качестве возможной для полосы таких действий с частотами. Дополнительно было выполнено исследование, предполагающее, что используется база данных, которая называется системой спектрального доступа (spectrum access system, SAS), обеспечивающая информацию о каналах, информацию о местоположении и информацию о приоритете, относящиеся к полосе частот, в которой предстоит работать.
В случае, когда полосы частот перекрываются друг с другом, как при вторичном использовании частоты, возможен случай, когда радиопередачи различных систем 10 радиосвязи взаимодействуют друг с другом. Поэтому в системе 1 связи, соответствующей настоящему раскрытию, взаимных помех между различными системами 10 радиосвязи избегают посредством устройства 300, управляющего тем, выполнять или не выполнять скачкообразную перестройку частоты, когда каждая из систем 10 радиосвязи ведет радиопередачу. Заметим, что скачкообразная перестройка частоты относится к приемной станции, использующей частотный ресурс во время переключения частотных ресурсов в пределах единицы времени, выделенной для передачи одной передающей станции 200 (пользователю).
Устройство 300 является устройством, управляющим радиосвязью множества систем 10 радиосвязи, содержащихся в системе 1 связи. В примере, показанном на фиг. 1, устройством 300 является сервер. Сервер 300 управляет радиосвязью в каждой системе 10 радиосвязи, основываясь на информации радиосети (здесь далее упоминается как сетевая информация), управляемой каждой системой 10 радиосвязи. Сетевая информация может содержать, например, информацию, указывающую полосу частот, используемую системой радиосвязи, информацию, указывающую область связи, временной слот связи и т. п. Сервер 300 получает эту сетевую информацию, например, от базы данных DB 400 или от устройства 500 датчика, через сеть 700 связи. Заметим, что помимо примеров, показанных на фиг. 1, устройство управления связью может быть реализовано, например, как отличные от них приемная станция 100, передающая станция 200, база данных DB 400, устройство 500 датчика или произвольное устройство (физическое устройство или логическое устройство). Дополнительно, множество устройств 300 могут обеспечиваться внутри системы 1 связи. Например, устройство 300 может обеспечиваться для каждой системы 10 радиосвязи. Заметим, что система 10 радиосвязи, радиосвязь которой должна управляться устройством 300, в последующем описании будет также упоминаться как система 10 радиосвязи, которая должна управляться.
Сеть 700 связи является проводной или беспроводной сетью связи, такой как, например, пакетная сеть передачи данных (PDN) и Интернет.
DB 400 является запоминающим устройством, которое хранит сетевую информацию. DB 400 регистрирует/обновляет сетевую информацию, принятую от каждой системы 10 радиосвязи, и передает сетевую информацию в ответ на запрос. Заметим, что здесь далее сетевая информация, хранящаяся в DB 400, будет также упоминаться как регистрационная информация DB.
Устройство 500 датчика является устройством, обнаруживающим ситуации использования частоты окружающими системами 10 радиосвязи для сбора сетевой информации. Заметим, что здесь далее сетевая информация, собранная устройством 500 датчика, будет также упоминаться как информация обнаружения. Заметим, что регистрационная информация DB является тем же самым типом информации, что и информация обнаружения, или регистрационная информация DB является типом информации, отличным от информации обнаружения. Дополнительно, помимо примеров, показанных на фиг. 1, устройство датчика может быть реализовано, например, как отличные от них приемная станция 100, передающая станция 200 или произвольное устройство (физическое устройство или логическое устройство). Дополнительно устройство 500 датчика может обеспечиваться независимо от каждой из систем 10 радиосвязи или может принадлежать каждой системе 10 радиосвязи.
Выше было приведено общее представление системы 1 связи, соответствующей настоящему варианту осуществления.
2. Пример конфигурации
Далее, пример конфигурации каждого компонента, содержащегося в системе 1 связи, соответствующей настоящему варианту осуществления, будет описан со ссылкой на фиг. 2-33.
2-1. Приемная станция
На фиг. 2 представлена блок-схема примера логической конфигурации приемной станции 100, соответствующей настоящему варианту осуществления. Как показано на фиг. 2, приемная станция 100, соответствующая настоящему варианту осуществления, содержит блок 110 связи и блок 120 управления.
2-1-1. Блок связи
Блок 110 связи является интерфейсом связи, служащим соединительным звеном между приемной станцией 100 и другими устройствами. Блок 110 связи передает/принимает данные при связи с другими устройствами проводным или беспроводным способом.
Например, блок 110 связи функционирует как блок радиосвязи, осуществляющий радиосвязь с передающей станцией 200. В этом случае, например, блок 110 связи принимает радиосигнал, переданный передающей станцией 200 при выполнении скачкообразной перестройки частоты. Блок 110 связи может иметь функцию усилителя, преобразователя частоты, демодулятора и т. п. и может, например, выводить принятые данные на блок 120 управления. Кроме того, блок 110 связи может передавать радиосигнал передающей станции 200 через антенну. Блок 110 связи может иметь функцию модулятора, усилителя и т. п. и, например, выполнять модуляцию, усиление мощности и т. п. для данных, полученных с выхода блока 120 управления, и передавать данные.
Кроме того, блок 110 связи передает/принимает данные при осуществлении связи с устройством 300, DB 400 или устройством 500 датчика проводным/беспроводным способом.
Функция датчика
Блок 110 связи может функционировать как устройство 500 датчика, которое будет описано далее. Например, блок 110 связи получает информацию обнаружения, измеряя уровень (мощность) приема радиосигнала в полосе используемых частот системы 10 радиосвязи, которой принадлежит сама приемная станция 100. Например блок 110 связи принимает запрос сетевой информации от устройства 300 управления связью и передает информацию датчика, полученную блоком 110 связи, устройству 300 управления связью или косвенно через произвольный узел связи, такой как передающая станция 200.
Функция приема данных
Блок 110 связи принимает данные, переданные передающей станцией 200. Как будет описано ниже, передающая станция 200 может передавать данные в то время, когда выполняется скачкообразная перестройка частоты, основываясь на информации установки скачкообразной перестройки частоты. В этом случае, например, блок 110 связи принимает радиосигнал, переданный от передающей станции 200 при выполнении скачкообразной перестройки частоты. Более конкретно, блок 110 связи выполняет прием и декодирование части радиоресурса, соответствующей шаблону скачкообразной перестройки частоты, используемому передающей станцией 200. Заметим, что информация установки скачкообразной перестройки частоты является информацией, относящейся к перескоку частоты, выполняемому передающей станцией 200, принадлежащей к системе 10 радиосвязи, которая должна управляться. Более подробное описание будет представлено дальше.
Блок 110 связи принимает информацию установки скачкообразной перестройки частоты от устройства 300 управления связью напрямую или косвенно через произвольный узел связи, такой как передающая станция. Дополнительно, блок 110 связи может сообщить передающей станции 200 информацию установки скачкообразной перестройки частоты, полученную от устройства 300 управления связью. Приемная станция 100 выполняет такое уведомление, например, в случае, когда базовая станция сотовой системы реализуется как приемная станция 100 и терминал пользователя реализуется как передающая станция 200. Функция сообщения информации установки скачкообразной перестройки частоты будет подробно описана далее в описании, относящемся к передающей станции 200.
2-1-2. Блок управления
Блок 120 управления, функционирующий как арифметическое процессорное устройство и устройство управления, управляет всей работой внутри приемной станции 100 в соответствии с различными типами программ. Блок 120 управления реализуется с помощью электронной схемы, такой как, например, центральный процессор (CPU) и микропроцессор. Заметим, что блок 120 управления может содержать постоянное запоминающее устройство (ROM), хранящее программу, операционный параметр и т. п., которые должны использоваться, и оперативное запоминающее устройство (RAM), временно хранящее параметр и т. п., изменяемые должным образом.
Например, блок 120 управления управляет приемной станцией 100 для приема данных, передаваемых передающей станцией 200 в то время, когда выполняется скачкообразная перестройка частоты, основываясь на информации установки скачкообразной перестройки частоты, полученной от устройства 300. Конкретно, блок 120 управления управляет блоком 110 связи для осуществления процесса декодирования, предполагая, что передающая станция 200 выполняет передачу в то время, когда выполняется скачкообразная перестройка частоты, используя информацию установки скачкообразной перестройки частоты.
Например, блок 120 управления управляет блоком 110 связи для получения информации датчика. В этом случае блок 120 управления может управлять блоком 110 связи для периодического получения информации датчика или управлять блоком связи 110 для получения информации датчика, инициируемого приемом запроса от сервера 300. Блок 120 управления управляет блоком 110 связи, чтобы передавать полученную информацию датчика устройству 300 периодически или в ответ на запрос. Заметим, что в случае, когда приемная станция 100 реализуется, например, как терминал пользователя сотовой системы, восходящий канал управления (PUCCH) или восходящий канал данных (PUSCH) используется для передачи информации датчика на передающую станцию 200.
Заметим, что блок 120 управления может иметь функцию блока 320 управления устройства 300 управления связью, которая будет описана далее.
2-2. Передающая станция
На фиг. 3 представлена блок-схема примера логической конфигурации передающей станции 200, соответствующей настоящему варианту осуществления. Как показано на фиг. 3, передающая станция 200, соответствующая настоящему варианту осуществления, содержит блок 210 связи и блок 220 управления.
2-2-1. Блок связи
Блок 210 связи является интерфейсом связи, служащим соединительным звеном между передающей станцией 200 и другими устройствами. Блок 210 связи передает/принимает данные при связи с другими устройствами проводным или беспроводным способом.
Например, блок 210 связи функционирует как блок радиосвязи, осуществляющий радиосвязь с приемной станцией 100. В этом случае, например, блок 210 связи передает приемной станции 100 через антенну радиосигнал, подвергающийся перескоку частоты. Блок 210 связи может иметь функцию модулятора, усилителя и т. п. и, например, выполнять модуляцию, усиление мощности и т. п. для данных, полученных с выхода блока 220 управления, и передавать данные. Дополнительно, блок 210 связи может принимать радиосигнал, передаваемый от приемной станции 100. Блок 210 связи может иметь функцию усилителя, преобразователя частоты, демодулятора и т. п. и, например, может выводить принятые данные на блок 220 управления.
Кроме того, блок 210 связи передает/принимает данные при осуществлении связи с устройством 300 управления связью, DB 400 или устройством 500 датчика проводным/беспроводным способом.
Функция обнаружения
Блок 210 связи может иметь функцию устройства 500 датчика, которое будет описано далее. Например, блок 210 связи получает считанную информацию, измеряя уровень приема радиосигнала в полосе частот, используемой системой 10 радиосвязи, которой принадлежит сама передающая станция 200. Например блок 210 связи принимает запрос сетевой информации от устройства 300 управления связью и передает информацию датчика, полученную блоком 210 связи, непосредственно устройству 300 управления связью или косвенно через произвольный узел связи, такой как приемная станция 100.
Функция скачкообразной перестройки частоты
Блок 210 связи передает данные приемной станции 100. В этом случае, передающая станция 200 может предавать данные в то время, когда выполняется скачкообразная перестройка частоты, основываясь на команде от устройства 300 управления связью. Более конкретно, блок 210 связи выполняет скачкообразную перестройку частоты, основываясь на информации установки скачкообразной перестройки частоты, принятой от устройства 300 управления связью. Скачкообразная перестройка частоты может выполняться в различных блоках. Пример блоков будет описан ниже.
Направление частоты
- блок поднесущих
- блок блоков поднесущих (таких как блок ресурсов)
- блок частотных каналов (компонентная несущая при агрегации несущих, канал связывания каналов)
Направление времени
- блок символов (таких как символ цифровой модуляции и символ OFDM/SC-FDMA)
- блок блоков символов (таких как блок множества символов и слот)
- блок кадров (таких как субкадр и пакет)
- блок блоков кадров (таких как радиокадр)
- блок дополнительного верхнего уровня (такого как IP-пакет и сеанс)
Блок 210 связи выполняет скачкообразную перестройку частоты, используя радиоресурс в соответствии с правилом, указанным в информации установки скачкообразной перестройки частоты. Здесь далее, правило использования радиоресурса будет также упоминаться как шаблон скачкообразной перестройки частоты. Пример шаблона скачкообразной перестройки частоты показан на фиг. 4-6.
На фиг. 4-6 показаны диаграммы для объяснения примера шаблона скачкообразной перестройки частоты в системе 10 радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления. На фиг. 4 показан шаблон скачкообразной перестройки частоты, в котором скачкообразная перестройка выполняется в блоке поднесущих в направлении частоты и в блоке символов в направлении времени. На фиг. 5 показан шаблон скачкообразной перестройки частоты, в котором скачкообразная перестройка выполняется в блоке поднесущих в направлении частоты и в блоке символов в направлении времени. На фиг. 6 показан шаблон скачкообразной перестройки частоты, в котором скачкообразная перестройка выполняется в блоке ресурсов в направлении частоты и в блоке слотов в направлении времени. Эти диаграммы показывают шаблоны скачкообразной перестройки частоты для передачи данных терминалу i, который является приемной станцией 100. Блок 210 связи может передавать данные, используя радиоресурс из числа шаблонов скачкообразной перестройки частоты, показанных на каждом чертеже.
Конкретные средства реализации скачкообразной перестройки частоты
Используя различные средства, блок 210 связи может передавать данные в то время, когда выполняется скачкообразная перестройка. Например, блок 210 связи выполняет скачкообразную перестройку частоты на физическом уровне (уровне PHY). Здесь, в качестве примера со ссылкой на фиг. 7, будет описан случай, в котором используется схема модуляции мультинесущей, такая как ортогональное мультиплексирование с частотным разделением (OFDM) и ортогонального мультидоступа с частотным разделением (OFDMA). Дополнительно, со ссылкой на фиг. 8, будет описан случай, в котором используется схема модуляции мультинесущей, такая как схема мультидоступа с частотным разделением и одиночной несущей (SC-FDMA).
На фиг. 7 представлен пример логической конфигурации блока 210 связи передающей станции 200, соответствующей настоящему варианту осуществления. Как показано на фиг. 7, блок 210 связи имеет функцию 2101 кодирования коррекции ошибок, функцию 2102 чередования, функцию 2103 последовательно-параллельного (S/P) преобразования, функцию 2104A цифровой модуляции, функцию 2104B цифрового преобразования, функцию 2105 отображения ресурсов, функцию 2106 фильтрации, функцию 2107 обратного быстрого преобразования Фурье (IFFT), функцию 2108 добавления циклического префикса (CP) и радиочастотную (RF) функцию 2109.
На фиг. 8 представлен пример функциональной конфигурации блока 210 связи передающей станции 200, соответствующей настоящему варианту осуществления. Как показано на фиг. 8, блок 210 связи имеет функцию 2101 кодирования коррекции ошибок, функцию 2102 чередования, функцию 2104 цифровой модуляции, функцию 2110 FFT, функцию 2105 отображения ресурсов, функцию 2106 фильтрации, функцию 2107 IFFT, функцию 2108 добавления циклического префикса (CP) и RF-функцию 2109.
В любой функциональной конфигурации скачкообразная перестройка частоты может выполняться, например, посредством данных передачи, отображаемых в радиоресурсах в соответствии с шаблоном скачкообразной перестройки частоты, когда ресурсы отображаются с помощью функции 2105 отображения ресурсов. Конкретно, например, функция 2105 отображения ресурсов изменяет место назначения отображения в соответствии со временем, когда символы модуляции отображаются в ресурсах направления частоты, таких как поднесущая, ресурсный блок и компонентная несущая. Дополнительно, скачкообразная перестройка частоты может выполняться посредством радиопередачи, выполняемой согласно шаблону скачкообразной перестройки частоты, когда радиосигнал передается с помощью радиочастотной функции 2109. Конкретно, например, радиочастотная функция 2109 изменяет частоту несущей в соответствии со временем, используя синтезатор частот и т. п.
Теперь будет подробно описана функция 2106 фильтрации. Как показано на фиг. 7, блок 210 связи передающей станции 200 выполняет IFFT, чтобы сформировать сигнал OFDM, после того, как выполняются кодирование коррекции ошибок, чередование, цифровая модуляция, отображение ресурсов и т. п. В этом случае, бок 210 связи может понизить уровень внеполосного излучения сигнала, дополнительно выполняя фильтрацию. Такой тип OFDM часто упоминается, например, как "отфильтрованная OFDM", "OFDM, соответствующая форме импульса", "мультинесущая после набора фильтров" и т. д.
Сигнал OFDM x(t), связанный с фильтрацией, определяется следующим уравнением.
 Уравнение 1
Уравнение 1
здесь K – количество поднесущих, ck, l – сигнальный компонент (соответствующий символу цифровой модуляции, такой как PSK и QAM в случае OFDM) поднесущей k. gk(t) – коэффициент фильтрации. T – длина символа OFDM. ΔF – промежуток между поднесущими.. Заметим, что можно сказать, что обычный сигнал OFDM, который не связывается с фильтрацией, соответствует сигналу, полученному при применении коэффициента фильтрации gk(t) в следующем уравнении к описанному выше уравнению 1.
Уравнение 2
в противном случае
В случае, когда сигнал формируется, выполняя фильтрацию, блок 210 связи может преобразовать сигнал в радиочастотный сигнал и передавать радиочастотный сигнал без добавления СР, который может добавляться для каждого символа OFDM в случае обычной OFDM. В этом случае, если возможно соответствующим образом исключить или скомпенсировать помеху между символами на стороне приемной станции 100, то можно уменьшить внеполосное излучение и предотвратить снижение эффективности использования частоты.
Как описано выше, поскольку блок 210 связи имеет функцию 2106 фильтрации, можно снизить уровень внеполосного излучения и способствовать уменьшению взаимных помех с другой системой 10 радиосвязи. Поэтому, в случае, когда блок 210 связи выполняет в сочетании фильтрацию и скачкообразную перестройку частоты, можно дополнительно повысить эффект снижения взаимных помех с другими системами 10 радиосвязи. Например, блок 210 связи может переключать, выполнять или не выполнять фильтрацию в соответствии с тем, выполняется или не выполняется скачкообразная перестройка частоты. Дополнительно, блок 210 связи может переключать, выполнять или не выполнять добавление СР в соответствии с тем, выполняется или не выполняется фильтрация. Например, в случае, когда фильтрация выполняется, используя фильтрованную OFDM и т. п., поскольку существует случай, когда трудно добавить СР, блок 210 связи может пропустить добавление СР в случае, когда фильтрация выполняется, и может добавлять СР в случае, когда фильтрация не выполняется. Также, дополнительно, блок 210 связи может переключать, выполнять или не выполнять повышающую дискретизацию в соответствии с тем, выполняется или не выполняется фильтрация. Блок 210 связи может дополнительно снижать уровень внеполосного излучения, включая фильтрацию координат с помощью включения повышающей дискретизации.
Выше был описан пример, в котором скачкообразная перестройка частоты выполняется на уровне PHY. В отличие от приведенного выше примера, блок 210 связи может выполнять скачкообразную перестройку частоты на верхнем уровне PHY. Здесь, в качестве примера, со ссылкой на фиг. 9 и 10, будет описан пример, в котором скачкообразная перестройка частоты выполняется на уровне L2 или на верхнем уровне, например, на уровне линии передачи данных (уровне МАС).
На фиг. 9 представлен пример функциональной конфигурации блока 210 связи передающей станции 200, соответствующей настоящему варианту осуществления. Как показано на фиг. 9, блок 210 связи имеет функцию 2111 жесткого сжатия заголовка (ROHC), функцию 2112 безопасности, функцию 2113 объекта управления радиолинией (RLC), функцию 2114 планирования, функцию 2115 мультиплексирования, функции 2116А и 2116В объектов гибридного автоматического запроса повторения (HARQ), функции 2117А и 2117В обработки PHY и функции 2118А и 2118В RF-обработки. Заметим, что PDCP на чертеже является протоколом конвергенции пакетных данных.
Этот пример функциональной конфигурации является примером случая, в котором блок 210 связи выполняет HARQ в блоке частотных каналов. Блок 210 связи выполняет скачкообразную перестройку частоты в функции 2114 планирования и/или в функции 2115 мультиплексирования. В этом примере функциональной конфигурации функция 2116 объекта HARQ обеспечивается на более поздней стадии функции 2114 планирования и функции мультиплексирования, которые могут выполнять скачкообразную перестройку частоты. Поэтому в отношении блока скачкообразной перестройки в направлении времени, скачкообразная перестройка предпочтительно применяется, по меньшей мере, в блоке кадров (субкадров).
Заметим, что порядок этих функций произволен и, например, функция 2116 объекта HARQ может предоставляться на более поздней стадии функции 2114 планирования, а функция 2115 мультиплексирования может предоставляться на более поздней стадии функции 2116 объекта HARQ. В этом случае, что касается блока скачкообразной перестройки в направлении времени, то скачкообразная перестройка может применяться в блоке, равном или меньшем, чем блок кадров.
На фиг. 10 представлен пример функциональной конфигурации блока 210 связи передающей станции 200, соответствующей настоящему варианту осуществления. Как показано на фиг. 10, блок 210 связи имеет функцию 2115 мультиплексирования, функции 2111A и 2111B ROHC, функции 2112A и 2112B безопасности, функции 2113A и 2113B объекта RLC, функции 2114A и 2114B планирования, функции 2116A и 2116B объекта HARQ, функции 2117A и 2117B обработки PHY и функции 2118A и 2118 радиочастотной обработки.
Этот пример функциональной конфигурации является примером в случае, когда блок 210 связи имеет функцию уровня L2, а также функцию уровня L1 для каждого частотного канала. В этом случае, скачкообразная перестройка предпочтительно выполняется в блоке данных верхнего уровня. Например, этому примеру соответствует пакет уровня IP. В направлении частоты может выполняться скачкообразная перестройка, в соответствии с чем частотный канал используется для передачи пакета. Что касается направления времени, то, например, скачкообразная перестройка может выполняться посредством функций 2114A и 2114B планирования и радиочастотных функций 2118A и 2118B.
Функция уведомления об информации установки скачкообразной перестройки частоты
Блок 210 связи принимает информацию установки скачкообразной перестройки частоты от устройства 300 управления связью непосредственно или косвенно через произвольный узел связи, такой как приемная станция 100. Дополнительно, блок 210 связи может уведомить приемную станцию 100 об информации установки скачкообразной перестройки частоты, полученной от устройства 300. Передающая станция 200 выполняет такое уведомление в случае, когда, например, базовая станция сотовой системы реализуется как передающая станция 200, и терминал пользователя реализуется как приемная станция 100.
Блок 210 связи может уведомить приемную станцию 100 об информации установки скачкообразной перестройки частоты, используя различные средства. Пример средств будет конкретно описан ниже.
(1) Уведомление каждой линии связи
Блок 210 связи уведомляет приемную станцию 100 об информации установки скачкообразной перестройки частоты каждый раз, когда появляется линия связи для передачи/приема данных. В этом случае, информация установки скачкообразной перестройки частоты передается, используя канал управления для каждой линии связи устройством радиосвязи, принадлежащим к системе 10 радиосвязи, которая должна управляться устройством 300 управления связью.
В случае, когда система работает, основываясь на субкадре или слоте, как в сотовой системе, канал управления и канал данных относятся к этой функции. Например, блок 210 связи хранит информацию установки скачкообразной перестройки частоты в канале управления (например, PDCCH) внутри субкадра и передает информацию приемной станции 100. Конкретно, блок 210 связи может хранить информацию установки скачкообразной перестройки частоты в нисходящей управляющей информации (DCI) канала PDCCH. Блок 210 связи затем применяет к каналу данных скачкообразную перестройку частоты, основываясь на информации установки скачкообразной перестройки частоты.
Существует множество возможных соотношений между каналом управления, в котором хранится информация установки скачкообразной перестройки частоты, и каналом данных, к которому применяется скачкообразная перестройка частоты. Конкретный пример такого соотношения будет описан ниже со ссылкой на фиг. 11-13.
На фиг. 11 показан пример, объясняющий соотношение между каналом управления и каналом данных в процессе уведомления об информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления. В примере, показанном на фиг. 11, скачкообразная перестройка частоты, основанная на информации установки скачкообразной перестройки частоты, применяется к каналу данных в пределах того же самого субкадра, что и канал управления, в котором хранится информация установки скачкообразной перестройки частоты. Этот пример может применяться, например, к нисходящей передаче от базовой станции к терминалу пользователя.
На фиг. 12 показан пример соотношения между каналом управления и каналом данных в процессе уведомления об информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления. В примере, показанном на фиг. 12, скачкообразная перестройка частоты, основанная на информации установки скачкообразной перестройки частоты, применяется к каналу данных внутри субкадра, отличающегося от субкадра, в котором хранится информация установки скачкообразной перестройки частоты. Этот пример может быть применен, например, при нисходящей передаче от базовой станции к терминалу пользователя. Дополнительно, в качестве другого примера, при дуплексной передаче с временным разделением (TDD) базовая станция может давать команду на скачкообразную перестройку частоты восходящего канала данных терминала пользователя, используя нисходящий канал управления.
На фиг. 13 представлен пример соотношения между каналом управления и каналом данных в процессе уведомления об информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления. В примере, показанном на фиг. 13, скачкообразная перестройка частоты, основанная на информации установки скачкообразной перестройки частоты, применяется к каналу данных внутри субкадра частоты, отличного от субкадра, в котором хранится информация установки скачкообразной перестройки частоты. Этот пример может быть применен, например, в случае, когда при дуплексной передаче с частотным разделением (FDD) базовая станция подает команду на скачкообразную перестройку частоты при восходящей передаче терминала пользователя, использующего нисходящий канал управления, и терминал пользователя применяет поданную команду на скачкообразную перестройку частоты при восходящей передаче терминала пользователя. Дополнительно, согласно применению агрегации несущих, обсуждавшемуся в LTE-A, для скачкообразной перестройки частоты канала данных с одной частотой команда может быть подана, используя канал управления с другой частотой (компонентной несущей).
Выше был описан случай, когда система работает, основываясь на субкадре или слоте, как в сотовой системе. Кроме примера, описанного выше, например, хранение информации установки скачкообразной перестройки частоты и применение скачкообразной перестройки частоты, основываясь на информации установки скачкообразной перестройки частоты, могут выполняться между различными каналами управления или могут выполняться между различными каналами данных.
С другой стороны, в случае, когда система работает, основываясь на пакете, как в беспроводной системе LAN, часть заголовка и часть данных пакета относятся к этой функции. Например, блок 210 связи хранит информацию установки скачкообразной перестройки частоты в части заголовка внутри пакета и применяет скачкообразную перестройку частоты к части данных, основываясь на информации установки скачкообразной перестройки частоты.
Существует множество возможных соотношений между частью заголовка, в которой хранится информация установки скачкообразной перестройки частоты, и частью данных, к которой применяется скачкообразная перестройка частоты. Конкретный пример этого соотношения будет описан ниже со ссылкой на фиг. 14.
На фиг. 14 представлен пример соотношения между частью заголовка и частью данных в процессе уведомления об информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления. В примере, показанном на фиг. 14, скачкообразная перестройка частоты, основанная на информации установки скачкообразной перестройки частоты, применяется к части данных (данные PHY), следующей за частью заголовка (заголовок PHY) внутри одного и того же пакета, в котором хранится информация установки скачкообразной перестройки частоты.
(2) Уведомление каждого из множества устройств
Блок 210 связи подает уведомление об информации установки скачкообразной перестройки частоты для каждой одиночной или множества приемных станций 100, выполняющих передачу/прием данных. В этом случае, информация установки скачкообразной перестройки частоты адресуется конкретному получателю устройства радиосвязи, принадлежащего системе 10 радиосвязи, которая должна управляться устройством 300 управления связью. Синхронизация уведомления может быть циклом, отличным от цикла уведомления для каждой линии связи.
Например, в сотовой системе, блок 210 связи передает информацию установки скачкообразной перестройки частоты приемной станции 100, используя системный информационный блок (system information block, SIB). Уведомление SIB обычно выполняется, используя нисходящий канал данных LTE (PDSCH) для системной информации. Уведомление SIB обычно выполняется периодически и обновляется периодически. Конечно, уведомление SIB может выполняться непериодически. Здесь, конкретный пример уведомления, используя SIB, будет описан со ссылкой на фиг. 15.
На фиг. 15 показан пример процесса уведомления об информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления. На фиг. 15 показан пример, в котором блок 210 связи передает SIB, используя любые другие радиокадры длительностью 10 мс в нисходящем канале LTE. В этом примере блок 210 связи передает SIB, в котором одна и та же информация установки скачкообразной перестройки частоты сохраняется четыре раза и обновление информации установки скачкообразной перестройки частоты должно передаваться с интервалами 80 мс.
Блок 210 связи может выполнить уведомление в отношении того, какой субкадр используется для выполнения уведомления SIB, используя, например, основной информационный блок (master information block, MIB). Уведомление MIB, в отличие от SIB, выполняется, используя нисходящий широковещательный канал LTE (PBCH). Уведомление/повторная передача MIB обычно выполняется периодически и MIB периодически обновляется.
На фиг. 16 показан пример процесса уведомления об информации установки скачкообразной перестройки частоты в соответствии с настоящим вариантом осуществления. На фиг. 16 показан пример, в котором MIB передается непрерывно, используя радиокадры длительностью 10 мс в нисходящем канале LTE. В этом примере блок 210 связи передает MIB, в котором одна и та же информация сохраняется четыре раза, и обновляет информацию, которая должна передаваться, с интервалами 40 мс.
Блок 210 связи может передавать информацию установки скачкообразной перестройки частоты, например, как сигнализацию RRC на уровне управления радиоресурсом (RRC), отличном от SIB. Заметим, что уведомление о сигнализации RRC, в основном, выполняется, используя PDSCH.
В приведенном выше примере, где уведомление выполняется для каждого устройства, блок 210 связи передает данные, применяя одну и ту же информацию установки скачкообразной перестройки частоты, если информация установки скачкообразной перестройки частоты не обновляется. Заметим, что блок 210 связи может устанавливать конкретное устройство в качестве места назначения передачи. Блок 210 связи может, например, установить одно конкретное устройство как место назначения передачи, выполняя одноадресную передачу, или может установить множество конкретных устройств в качестве мест назначения передачи, выполняя многоадресную передачу.
(3) Уведомление всей системы или части системы
Блок 210 связи уведомляет всю систему или часть системы об информации установки скачкообразной перестройки частоты. В этом случае, информация установки скачкообразной перестройки частоты передается широковещательно устройством радиосвязи, принадлежащим к системе 10 радиосвязи, которая должна управляться устройством 300 управления связью. Например, устройство, управляющее всей системой 10 радиосвязи, которая должна управляться, выполняет широковещательную передачу устройствам, управляемым устройством управления связью. Например, широковещательную передачу выполняет базовая станция в сотовой системе или точка доступа в беспроводной системе LAN.
Например, в сотовой системе блок 210 связи выполняет уведомление об информации установки скачкообразной перестройки частоты, используя широковещательный канал (PBCH). Обычно радиоресурс сотовой системы образует субкадр (или слот) в направлении времени и PBCH передается регулярно от базовой станции в нисходящем канале, используя субкадр (или слот). Блок 210 связи хранит информацию установки скачкообразной перестройки частоты в этом PBCH. В сотовой системе, подобной LTE, блок 210 связи может хранить информацию установки скачкообразной перестройки частоты в основном информационном блоке (MIB) или в системном информационном блоке (SIB).
Например, в беспроводной системе LAN, блок 210 связи широковещательно передает информацию установки скачкообразной перестройки частоты. Например, в случае беспроводной системы LAN, работающей на основе пакетов, блок 210 связи выполняет передачу, используя широковещательный пакет.
В описанном выше примере, где уведомление выполняется для целой системы (или части системы), блок 210 связи передает данные, применяя одну и ту же информацию установки скачкообразной перестройки частоты, если информация установки скачкообразной перестройки частоты не обновляется. Заметим, что блок 210 связи, выполняя многоадресную передачу, может установить множество конкретных устройств в качестве мест назначения передачи.
Выше было описано конкретное средство для выполнения уведомления об информации установки скачкообразной перестройки частоты.
На фиг. 17 показаны отношения между средством уведомления об информации установки скачкообразной перестройки частоты и каналами в соответствии с настоящим вариантом осуществления. В верхней части фиг. 17 показан логический канал, в средней части показан транспортный канал и в нижней части показан физический канал. На фиг. 17 позиции (1), (2) и (3), конкретно описанные выше, соответственно отображаются в каналы. Например, в случае "(1) Уведомление каждой линии связи” уведомление выполняется, используя PDCCH, тогда как информация установки скачкообразной перестройки частоты сохраняется как DCI в физическом канале. Далее, в случае (2) "Уведомление каждого одиночного или множества устройств" уведомление выполняется, используя PDSCH после того, как информация установки скачкообразной перестройки частоты сохраняется как SIB или сигнализация RRC в логическом канале. Дополнительно, в случае "(3) Уведомление всей системы или части системы" уведомление выполняется, используя PBCH после того, как информация установки скачкообразной перестройки частоты сохраняется MIB или SIB в логическом канале. Таким образом, процедура в отношении того, выполняется ли процесс в логическом канале или в физическом канале, может изменяться в соответствии с каналом, используемым для уведомления.
2-2-2. Блок управления
Блок 220 управления, который функционирует как арифметическое процессорное устройство и устройство управления, управляет всей работой в пределах передающей станции 200 в соответствии с различными видами программ. Например, блок 220 управления реализуется электронной схемой, такой как CPU и микропроцессор. Заметим, что блок 220 управления может содержать ROM, которое хранит программу, операционный параметр и т. п. для использования, и RAM, которое временно хранит параметр и т. п., изменяемые по мере необходимости.
Например, блок 220 управления выполняет управление таким образом, чтобы передающая станция 200 передавала данные в то время, когда выполняется скачкообразная перестройка частоты. Более конкретно, блок 220 управления управляет блоком 210 связи, чтобы передавать данные, выполняя скачкообразную перестройку частоты, основываясь на информации установки скачкообразной перестройки частоты, полученной от устройства 300.
Например, блок 220 управления управляет блоком 210 связи, чтобы передавать информацию установки скачкообразной перестройки частоты, являющуюся информацией, относящейся к скачкообразной перестройке частоты, выполняемой передающей станцией 200, приемной станции 100, принадлежащей к той же самой системе 10 радиосвязи, что и передающая станция 200.
Например, блок 220 управления управляет блоком 210 связи, чтобы получить информацию датчика. В этом случае, блок 220 управления может управлять блоком 210 связи, чтобы периодически получать информацию датчика, или может управлять блоком 210 связи, чтобы получать информацию датчика, инициируемую приемом запроса от сервера 300. Блок 520 управления управляет блоком 210 связи, чтобы передавать полученную информацию датчика устройству 300 управления связью периодически или в ответ на запрос.
Заметим, что блок 220 управления может иметь функцию блока 320 управления устройства 300 управления связью, которая будет описана позже.
2-3. Устройство управления связью
На фиг. 18 представлена блок-схема, показывающая пример логической конфигурации устройства 300 управления связью в соответствии с настоящим вариантом осуществления. Как показано на фиг. 18, устройство 300 управления связью, соответствующее настоящему варианту осуществления, содержит блок 310 связи и блок 320 управления.
2-3-1. Блок связи
Блок 310 связи является интерфейсом связи, соединяющим устройство 300 управления связью и другие устройства. Блок 310 связи передает/принимает данные при связи с другими устройствами проводным или беспроводным способом.
Например, блок 310 связи осуществляет связь с устройствами (приемной станцией 100 и передающей станцией 200), принадлежащим к каждой системе 10 радиосвязи. Кроме того, блок 310 связи осуществляет связь с DB 400 и устройством 500 датчика.
Заметим, что устройство 300 управления связью может быть тем же самым, что и приемная станция 100 или передающая станция 200, или быть независимым от приемной станции 100 или передающей станции 200. Здесь, смысл "тем же самым/независимым" содержит значение логически того же самого/независимого, а также значение физически того же самого/независимого. Блок 310 связи выполняет передачу/прием через проводное или беспроводное соединение в случае независимого устройства и выполняет передачу/прием внутри устройства в случае одного и того же устройства.
Функция сбора сетевой информации
Блок 310 связи передает запрос сетевой информации и принимает сетевую информацию. Например, блок 310 связи получает сетевую информацию других систем 10 радиосвязи от DB 400, передавая запрос DB 400 и принимая в ответ регистрационную информацию DB. Дополнительно, блок 310 связи получает сетевую информацию других систем 10 радиосвязи от устройства 500 датчика, передавая запрос устройству 500 датчика и принимая в ответ информацию датчика. Блок 310 связи может непосредственно принимать сетевую информацию от DB 400 от устройства 500 датчика или может принимать сетевую информацию посредством других произвольных узлов связи. Блок 310 связи может получать сетевую информацию для процесса управления системой 10 радиосвязи блоком 320 управления или может регулярно получать/обновлять сетевую информацию. Хотя цикл получения/обновления произволен, цикл предпочтительно устанавливается, например, в пределах диапазона между 30 секундами и одним днем.
Функция уведомления об информации установки скачкообразной перестройки частоты
Блок 310 связи уведомляет каждую систему 10 радиосвязи об информации установки скачкообразной перестройки частоты, сформированной блоком 320 управления. Например, блок 310 связи передает информацию установки скачкообразной перестройки частоты приемной станции 100 и передающей станции 200, содержащуюся в каждой системе 10 радиосвязи, непосредственно или косвенно через произвольный узел связи.
Таким образом, например, в сотовой системе UE и eNB, которые функционируют как приемная станция 100 или передающая станция 200, получают информацию установки скачкообразной перестройки частоты. В любом случае, UE получает информацию установки скачкообразной перестройки частоты посредством eNB. eNB передает информацию установки скачкообразной перестройки частоты к UE, используя, например, широковещательный канал или широковещательный пакет. Дополнительно, что касается связи "устройство-устройство" (связь D2D), при которой связь осуществляется непосредственно между терминалами, то два или более UE, функционирующих как приемная станция 100 или передающая станция 200, получают информацию установки скачкообразной перестройки частоты посредством eNB.
Заметим, что блок 310 связи может выполнять уведомление о каждой информации, содержащейся в информации установки шаблона скачкообразной перестройки частоты, за один раз или может выполнять уведомление способом с разделением.
Функция регистрации шаблона скачкообразной перестройки частоты
Блок 310 связи передает DB 400 шаблон скачкообразной перестройки частоты, определенный блоком 320 управления. Таким образом, в случае, когда обеспечивается устройство 300 управления связью, например, для каждой системы 10 радиосвязи, шаблон скачкообразной перестройки частоты, который должен использоваться собственной системой, может использоватьтся совместно с другими системами 10 радиосвязи через DB 400. Посредством этого можно выбирать шаблоны со скачкообразной перестройки частоты таким образом, чтобы шаблоны скачкообразной перестройки частоты соответствующих систем 10 радиосвязи не перекрывались друг с другом.
2-3-2. Блок управления
Блок 320 управления, функционирующий как арифметическое процессорное устройство и устройство управления, управляет всей работой внутри устройства 300 управления связью в соответствии с различными видами программ. Блок 320 управления реализуется электронной схемой, такой как, например, CPU и микропроцессор. Заметим, что блок 320 управления может содержать ROM, которое хранит программу, рабочий параметр и т. п. для использования, и RAM, которое временно хранит параметр и т. п., изменяющиеся в зависимости от необходимости.
Блок 320 управления управляет радиосвязью системы 10 радиосвязи, которая должна управляться, основываясь на сетевой информации. Конкретно, блок 320 управления выполняет управление тем, выполняет ли передающая станция 200, принадлежащая к системе 10 радиосвязи, которая должна управляться, скачкообразную перестройку частоты, основываясь на сетевой информации другой системы 10 радиосвязи (второй радиосети), отличающейся от системы 10 радиосвязи, которая должна управляться, (первой радиосети). Блок 320 управления формирует информацию установки скачкообразной перестройки частоты, собирая сетевую информацию, принимая решение о режиме работы системы 10 радиосвязи, которая должна управляться, и принимая решение о шаблоке скачкообразной перестройки частоты системы 10 радиосвязи, которая должна управляться. Каждая функция блока 320 управления будет последовательно описана ниже.
Функция сбора сетевой информации
Например, блок 320 управления получает сетевую информацию через блок 310 связи. Например, блок 320 управления может получить регистрационную информацию DB от DB 400 в качестве сетевой информации. Блок 230 управления получает регистрационную информацию DB, получаемую обратно от DB 400 в ответ, например, на передачу DB 400 запроса сетевой информации. Альтернативно, блок 320 управления может получать информацию датчика от устройства 500 датчика (устройства 500 датчика или узла связи, такого как приемная станция 100 и передающая станция 200, функционирующих в качестве устройства 500 датчика) в качестве сетевой информации. Блок 320 управления получает информацию считыванию, передаваемую обратно от устройства 500 датчика, например, в ответ на передачу запроса сетевой информации устройству 500 датчика. Блок 320 управления может одновременно получать сетевую информацию, относящуюся к множеству систем радиосвязи.
Определение сетевой информации
Заметим, что блок 320 управления может использовать либо регистрационную информацию DB, либо информацию датчика в качестве сетевой информации или может использовать оба вида информации совместно. Конкретный пример конкретного содержания сетевой информации будет описан ниже.
- Регистрационная информация DB
Например, регистрационная информация DB содержит информацию, указанную в приведенной ниже таблице. Приведенная таблица показывает регистрационную информацию DB, относящуюся к одной системе 10 радиосвязи. В то же самое время регистрационная информация DB может предоставляться для множества систем 10 радиосвязи.
Таблица 1
"Информация, указывающая операционную систему" является идентификационной информацией для идентификации системы 10 радиосвязи. "Информация, указывающая оператора" является идентификационной информацией для идентификации оператора, управляющего системой 10 радиосвязи. "Информация, указывающая рабочую полосу частот" является информацией, указывающей полосу частот, используемую системой 10 радиосвязи. "Информация, указывающая рабочее местоположение" является информацией, указывающей местоположение, в котором управляют системой 10 радиосвязи. "Информация, указывающая рабочий период" является информацией, указывающей временной промежуток, в котором управляют системой 10 радиосвязи. "Информация, указывающая приоритет" является информацией, указывающей приоритет системы 10 радиосвязи. "Информация, указывающая шаблон скачкообразной перестройки частоты" является информацией, указывающей шаблон скачкообразной перестройки частоты, используемый системой 10 радиосвязи.
Заметим, что "шаблон скачкообразной перестройки частоты" может содержать, например, флаг, указывающий, выполняется ли скачкообразная перестройка частоты, и информацию, указывающую шаблон скачкообразной перестройки частоты в случае, когда выполняется скачкообразная перестройка частоты. Дополнительно, информация, относящаяся ко множеству шаблонов скачкообразной перестройки частоты, которые могут использоваться системой 10 радиосвязи, может храниться в "шаблоне скачкообразной перестройки частоты". В этом случае, также содержится информация, указывающая, какой шаблон скачкообразной перестройки частоты используется для выполнения скачкообразной перестройки частоты.
Другой пример регистрационной информации DB указывается в следующей таблице.
Таблица 2
"Информационный нижний предел указания полосы рабочей частоты" является информацией, указывающей нижний предел полосы частот, используемой системой 10 радиосвязи. "Информация, указывающая верхний предел рабочей полосы частоты" является информацией, указывающей верхний предел полосы частот, используемой системой 10 радиосвязи. “Информация, указывающая порог λ OBWR" является информацией, указывающей порог, относящийся к отношению перекрытия полос частот использования, которое будет описано позже.
Заметим, что информация, содержащаяся в регистрационной информации DB, указанная в приведенной выше таблице, содержит информацию, которая может не приводиться. Например, когда устройство 300 управления связью содержит информацию, указывающую, по меньшей мере, любое рабочее местоположение, рабочий период и рабочую полосу частот системы 10 радиосвязи, которая должна управляться, в запросе сетевой информации, информация, соответствующая содержащейся информации, может не предоставляться как регистрационная информация DB. Таким образом, поскольку сторона DB 400 выборочно предоставляет регистрационную информацию DB, относящуюся к системам 10 радиосвязи, которые, вероятно, будут создавать друг другу взаимные помехи в результате рабочих местоположений, рабочих периодов и рабочих полос частот, перекрывающихся друг с другом или находящихся почти рядом друг с другом, эта информация может не предоставляться.
В отличие от описанных выше примеров, регистрационная информация DB может быть параметром, разрешаемым системой 10 радиосвязи, которая должна управляться. В этом случае, например, блок 320 управления содержит информацию системы 10 радиосвязи, которая должна управляться, в запросе сетевой информации и сторона DB 400 вычисляет разрешенный параметр. Пример регистрационной информации DB для этого случая приводится в нижеследующей таблице.
Таблица 3
"Информация, указывающая разрешенную полосу частот" является информацией, указывающей полосу частот, которая может быть использована системой 10 радиосвязи, которая должна управляться. "Информация, указывающая разрешенное местоположение" является информацией, указывающей местоположение, в котором система 10 радиосвязи, которая должна управляться, может управлять радиосетью, используя разрешенную полосу частот. "Информация, указывающая разрешенный период" является информацией, указывающей период, в течение которого система 10 радиосвязи, которая должна управляться, в допустимом местоположении может управлять радиосетью, используя разрешенную полосу частот. "Информация, указывающая разрешенную максимальную мощность передачи" является информацией, указывающей максимальную мощность передачи, которая может использоваться передающей станцией 200, содержащейся в системе 10 радиосвязи, которая должна управляться. "Информация, указывающая разрешенный приоритет" является информацией, указывающей приоритет системы 10 радиосвязи, которая должна управляться. "Информация, указывающая разрешенный шаблон скачкообразной перестройки частоты" является информацией, указывающей шаблон скачкообразной перестройки частоты, который разрешено использовать в системе 10 радиосвязи, которая должна управляться.
- Информация датчика
Информация датчика предоставляется в случае, когда существует система 10 радиосвязи, которая может быть обнаружена устройством 500 датчика. Например, информация датчика содержит информацию, указанную в нижеследующей таблице. Информация датчика для множества систем 10 радиосвязи может предоставляться одновременно.
Таблица 4
"Информация, указывающая систему, которая должна обнаруживаться" является идентификационной информацией для идентификации системы 10 радиосвязи, которая должна обнаруживаться. "Информация, указывающая флаг, указывающий присутствие/отсутствие системы" является флагом, указывающим, может ли обнаруживаться система 10 радиосвязи, которая должна управляться. "Информация, указывающая полосу частот датчика" является информацией, указывающей полосу частот, в которой радиосвязь посредством системы 10 радиосвязи, которая должна управляться, может обнаруживаться и может обнаруживаться информация, относящаяся к полосе частот, используемой системой 10 радиосвязи, которая должна обнаруживаться. "Информация, указывающей местоположение датчика" является информацией, указывающей местоположение устройства 500 датчика, выполняющего обнаружение, и информацией, относящейся к местоположению, в котором действует система 10 радиосвязи, которая должна обнаруживаться. "Информация, указывающая период датчика" является информацией, указывающая период, в течение которого целевая система 10 радиосвязи может обнаруживать сигнал передачи, и информацией, относящейся к периоду, в течение действует система 10 радиосвязи, которая должна обнаруживаться. "Информация, указывающая приоритет" является информацией, указывающей приоритет системы 10 радиосвязи, которая должна обнаруживаться. "Информация, указывающая шаблон скачкообразной перестройки частоты при считывании" является информацией, указывающей обнаруженный шаблон скачкообразной перестройки частоты.
Заметим, что, например, устройство 500 датчика может идентифицировать, какая система 10 радиосвязи выполняет радиосвязь, обнаруженную из формы принятого сигнала. Дополнительно, устройство 500 датчика может хранить приоритет для каждой системы 10 радиосвязи.
С другой стороны, возможен случай, когда трудно идентифицировать, какая система 10 радиосвязи выполняет обнаруженную радиосвязь, например, в случае, когда устройство 500 датчика обнаруживает только принятый уровень мощности. В этом случае, например, блок 320 управления определяет "флаг, указывающий присутствие/отсутствие системы", сравнивая обнаруженный уровень принятой мощности с порогом. Пример информации обнаружения в этом случае указывается в следующей таблице.
Таблица 5
"Информация, указывающая результат обнаружения уровня" является информацией, указывающей уровень принятой мощности, обнаруженной устройством 500 датчика. Результат обнаружения уровня может быть информацией, указывающей значение принятого уровня мощности, или, как указано в нижеследующей таблице, может быть информацией, указывающей результат деления уровня принятой мощности на N классов.
Таблица 6
Функция принятия решения о рабочем режиме
Блок 320 управления принимает решение о рабочем режиме системы 10 радиосвязи, которая должна управляться, которым должен быть режим скачкообразной перестройки частоты или обычный режим. Заметим, что режим скачкообразной перестройки частоты является режимом работы, в котором передающая станция 200 передает данных в то время, когда выполняется скачкообразная перестройка частоты. Обычный режим является режимом работы, в котором передающая станция 200 передает данные, не выполняя скачкообразную перестройку частоты. Блок 320 управления может принимать решение о режиме работы, основываясь на различных критериях. Пример критериев для принятия решения о режиме работы будет описан ниже. Заметим, что блок 320 управления может принять решение о режиме работы, произвольно объединяя описанные ниже критерии.
- Необходимость получения сетевой информации
Например, блок 320 управления может принять решение о режиме работы, основываясь на том, нужно ли получать сетевую информацию. Например, блок 320 управления может принять решение об обычном режиме в случае, когда соответствии с законом требуется получать сетевую информацию других систем 10 радиосвязи и не требуется устанавливать в качестве рабочего режима режим скачкообразной перестройки частоты. Требуется ли получать сетевую информацию, может соответствовать правилам передачи радиосигналов в каждой стране, таким как, например, американский федеральный закон SAS и Европейская лицензия совместного доступа (LSA). Форма, в которой принимается решение о режиме работы, основываясь на том, необходимо ли получить сетевую информацию, полезна в случае, когда трудно получить точную сетевую информацию системы 10 радиосвязи, которая должна управляться. Например, в оношении такой системы, как радиолокационная станция, которая использует полосу частот, изменяемую во времени, возможен случай, когда трудно получить точную информацию о полосе частот, времени, местоположении и т. п., используемых системой. Дополнительно, возможен также случай, когда DB 400 обеспечивает параметр радиосвязи (такой как, например, частота (центральная и ширина полосы), которую разрешается использовать, допустимая максимальная мощность передачи и допустимый период использования), которые разрешаются использовать системе 10 радиосвязи, которая должна управляться, вместо сетевой информации о других системах 10 радиосвязи. В таком случае, может быть трудно оценить вероятность, что система 10 радиосвязи, которая должна управляться, создает взаимные помехи с другими системами 10 радиосвязи. Также, в таком случае, возможно уменьшить взаимные помехи с другими системами радиосвязи (например, радиолокационной системой) системой 10 радиосвязи, которая должна управляться, применяя скачкообразную перестройку частоты.
- Приоритет сети
Дополнительно, блок 320 управления может принять решение о рабочем режиме, основываясь на приоритете других систем 10 радиосвязи. Например, блок 320 управления может принять решение о режиме скачкообразной перестройки частоты в качестве рабочего режима в случае, когда приоритет других систем 10 радиосвязи более высокий, чем приоритет системы 10 радиосвязи, которая должна управляться, и принять решение об обычном режиме в качестве рабочего режима в случае, когда приоритет других систем 10 радиосвязи ниже, чем приоритет системы 10 радиосвязи, которая должна управляться. Таким образом, можно уменьшить взаимные помехи с системой 10 радиосвязи, обладающей более высоким приоритетом, и улучшить качество связи системы 10 радиосвязи, которая должна управляться. Заметим, что блок 320 управления может принять решение о режиме скачкообразной перестройки частоты в качестве рабочего режима в случае, когда существует вероятность, что существуют другие системы 10 радиосвязи, обладающие приоритетом, равным приоритету системы 10 радиосвязи, которая должна управляться. Блок 320 управления определяет вероятность, что существуют другие системы 10 радиосвязи, обладающие более высоким приоритетом, основываясь на сетевой информации каждой системы 10 радиосвязи.
Приоритет может произвольно устанавливаться блоком 320 управления или может устанавливаться, основываясь на правилах радиопередачи страны, в которой используется система 10 радиосвязи, таких как, например, американский федеральный закон SAS и Европейская LSA. Здесь, конкретный пример приоритета будет описан со ссылкой на фиг. 19-21.
На фиг. 19-21 представлен пример приоритета системы 10 радиосвязи в настоящем варианте осуществления. На фиг. 19 показан пример приоритета, относящегося к незанятому телевидением участку спектра. Как видно на фиг. 19, поскольку телевизионная система должна быть защищена от помех со стороны других систем радиосвязи, для нее устанавливается высокий приоритет. Приоритет ниже приоритета телевизионной системы устанавливается другим системам радиосвязи, которые могут создавать взаимные помехи с телевизионной системой. На фиг. 20 показан пример приоритета в американском федеральном законе SAS. На фиг. 21 показан пример приоритета в Европейской LSA. Как показано на фиг. 20 и 21, могут быть установлены два или три уровня приоритета. Конечно, может быть установлен произвольный уровень из четырех или более уровней приоритета.
- Вероятность взаимных помех
Помимо вышеупомянутого, блок 320 управления может принять решение о рабочем режиме, основываясь на том, существует ли вероятность, что система 10 радиосвязи, которая должна управляться, может создавать взаимные помехи с другими системами 10 радиосвязи. Например, блок 320 управления может принять решение о режиме скачкообразной перестройки частоты в качестве рабочего режима в случае, когда существует вероятность взаимных помех, или принять решение об обычном режиме в качестве рабочего режима в случае, когда отсутствует вероятность взаимных помех. Блок 320 управления определяет вероятность взаимных помех, основываясь на сетевой информации каждой системы 10 радиосвязи.
- Определение взаимных помех, основываясь на перекрытии используемых полос частот
Например, блок 320 управления определяет, что существует вероятность взаимных помех в случае, когда существует вероятность, что используемая полоса частот системы 10 радиосвязи, которая должна управляться, может, по меньшей мере, частично перекрываться с используемыми полосами частот других систем 10 радиосвязи. Блок 320 управления определяет перекрытие используемых полос частот, основываясь на сетевой информации, и определяет вероятность взаимных помех, основываясь на этом результате определения.
В случае, когда блок 320 управления определяет перекрытие используемых полос частот, основываясь на информации распознавания, предпочтительно обеспечить в определении диапазоны по сравнению со случаем, когда определение выполняется, основываясь на регистрационной информации DB. Например, блок 320 управления может расценить, что существует вероятность, что используемые полосы частот могут перекрываться в случае, когда обнаруживается другая система 10 радиосвязи, которая использует полосу в пределах заданного диапазона используемой полосы частот системы 10 радиосвязи, которая должна управляться. Это означает, что возможно в большей степени предотвратить взаимные помехи с другими системами 10 радиосвязи. Дополнительно, устанавливая диапазон, в котором существует вероятность перекрытия, и определяя диапазон в пределах заданной ширины, можно не рассматривать при определении другие системы 10 радиосвязи, которые, менее вероятно, будут создавать взаимные помехи. Конечно, выделение диапазонов при определении может также быть выполнено подобным образом в процессе определении, основываясь на регистрационной информации DB.
Блок 320 управления может определить перекрытие используемых полос частот, основываясь на том, меняют ли другие системы 10 радиосвязи свои используемые полосы частот во времени. Например, блок 320 управления может решить, что существует вероятность перекрытия используемых полос частот в случае, когда другие системы 10 радиосвязи изменяют во времени используемые полосы частот, потому что существует вероятность, что используемые полосы частот могут перекрываться в то время, как другие системы 10 радиосвязи изменяют используемые полосы частот. Это означает, что можно в большей степени предотвратить взаимные помехи с другими системами радиосвязи 10.
Дополнительно, блок 320 управления может решить, что существует вероятность перекрытия используемых полос частот в случае, когда направление, в котором другие системы 10 радиосвязи изменяют используемые полосы частот во времени, является направлением, приближающимся к используемой полосе частот системы 10 радиосвязи, которая должна управляться. Это означает, что можно в большей мере предотвратить взаимные помехи с другими системами 10 радиосвязи. Дополнительно, блок 320 управления может решить, что не существует никакой вероятности перекрытия используемых полос частот в случае, когда направление, в котором другие системы 10 радиосвязи изменяют во времени свои используемые полосы частот, является направлением, уходящим от используемой полосы частот системы 10 радиосвязи, которая должна управляться. Это означает, что можно сократить количество случаев, при которых принимается решение, что существует возможность перекрытия используемых полос частот, с тем, чтобы можно было предотвратить в системе 10 радиосвязи, которая должна управляться, выполнение ненужной скачкообразной перестройки частоты. Заметим, что система 10 радиосвязи, которая изменяет во времени используемую полосу частот, может содержать, например, радиолокационную систему.
Блок 320 управления определяет, изменяют ли во времени другие системы 10 радиосвязи используемые полосы частот, основываясь на сетевой информации других систем 10 радиосвязи. Блок 320 управления может знать, изменяют ли во времени другие системы 10 радиосвязи используемые полосы частот, из регистрационной информации DB или может это знать из информации обнаружения в процессе определения. В случае, когда определяют, изменяют ли во времени другие системы 10 радиосвязи используемые полосы частот, основываясь на информации обнаружения, устройство 500 датчика предпочтительно обнаруживает более широкую полосу пропускания вокруг полосы частот системы 10 радиосвязи, которая должна управляться, а также используемую полосу частот системы 10 радиосвязи, которая должна управляться. Обнаружение посредством устройства 500 датчика и процесс определения в блоке 320 управления будут описаны со ссылкой на фиг. 22 и 23.
На фиг. 22 и 23 представлены диаграммы для объяснения временного изменения используемой полосы частот системой 10 радиосвязи в соответствии с настоящим вариантом осуществления.
Например, на фиг. 22 показан пример, в котором система радиосвязи, которая должна обнаруживаться, изменяет во времени используемую полосу частот с нижней полосы на верхнюю полосу. Ссылочная позиция 2200 указывает полосу частот, которая должна использоваться другой системой 10 радиосвязи, которая не управляется, и ссылочная позиция 2210 указывает полосу частот, которая должна использоваться системой 10 радиосвязи, которая должна управляться. Дополнительно, устройство 500 датчика обнаруживает диапазон (ссылочная позиция 2220), который шире, чем полоса частот, которая должна использоваться системой 10 радиосвязи, которая должна управляться. Таким образом, посредством устройства 500 датчика, обнаруживающего более широкий диапазон, блок 320 управления может обнаружить, что существует система 10 радиосвязи, который изменяет во времения полосу частот, и что направление, в котором система 10 радиосвязи изменяет во времени полосу частот, является направлением, приближающимся к используемой полосе частот, прежде чем полоса частот перекроется с используемой полосой частот системы радиосвязи, которая должна управляться. Таким образом, можно быстро выполнить скачкообразную перестройку частоты в системе 10 радиосвязи, которая должна управляться, с тем, чтобы иметь возможность повысить вероятность снижения взаимных помех с другими системами 10 радиосвязи и предотвратить ухудшение.
Здесь, на фиг. 22 показан пример, в котором устройство 500 датчика непрерывно обнаруживает полосу частот, а на фиг. 23 показано устройство 500 датчика, которое может дискретно обнаруживать полосу пропускания. Ссылочная позиция 2300 указывает полосу частот, используемую другой системой 10 радиосвязи, которая не управляется, а ссылочная позиция 2310 связи указывает полосу частот, используемую системой 10 радиосвязи, которая должна управляться. Дополнительно, устройство 500 датчика обнаруживает диапазон, который шире, чем полоса частот, используемая системой 10 радиосвязи, которая должна управляться, для каждой из полос, которые получаются дискретно, разделяя полосу по индексам от -N до M (ссылочные позиции 2320 №-N – 2320 №M). В случае, когда устройство 500 датчика дискретно выполняет обнаружение, поскольку состояние, в котором используемая частота изменяется во времени, проявляется как обнаруженное изменение канала, блок 320 управления может легко обнаружить временное изменение используемой частоты системы 10 радиосвязи. Дополнительно, поскольку в устройстве 500 датчика одна обнаруживаемая полоса может быть сделана более узкой, например, также в случае, когда обнаружение энергии выполняется в индивидуальных полосах, можно смягчить требования технологии обнаружения, которые задаются индивидуально. Заметим, что хотя на фиг. 23 полоса частот устанавливается с фиксированными частотными интервалами, ширина полосы может устанавливаться с произвольными интервалами. Дополнительно, хотя на фиг. 23 показана ширина полосы, которая должна обнаруживаться, с тем, чтобы используемая полоса частот системы 10 радиосвязи, была самой широкой, а другие полосы частот являлись узкими, полосы частот могут быть равны или другие полосы частот могут быть шире. В этом случае можно делать обнаружение в устройстве 500 датчика более простым.
Заметим, что хотя на фиг. 22 и 23 показаны примеры, в которых полоса частот изменяется во времени от нижней полосы до верхней полосы, тоже самое также применяется к случаю, где полоса частот изменяется во времени от верхней полосы до нижней полосы. Дополнительно, описанное выше временное изменение используемой полосы частот сделано отличающимся от скачкообразного изменения в направлении времени при скачкообразной перестройке частоты. Например, также можно расценить изменение используемой полосы частот в блоке, более длительном, чем произвольный блок в направлении времени, как изменение во времени, и расценить изменение используемой полосы частот в более коротком блоке, как скачкообразное изменение. Помимо сказанного выше, также можно расценить изменение полосы частот, не осуществляя связи, как в радиолокационнной системе, как временное изменение, и расценить изменение полосы частот, во время осуществления связи, как скачкообразное изменение.
- Определение взаимных помех, основываясь на перекрытии рабочих местоположений
Например, блок 320 управления определяет, что существует вероятность взаимных помех в случае, когда существует вероятность, что рабочее местоположение системы 10 радиосвязи, которая должна управляться, может, по меньшей мере, частично перекрываться с рабочими местоположениями других систем 10 радиосвязи. Блок 320 управления определяет перекрытие рабочих местоположений, основываясь на сетевой информации, и определяет вероятность взаимных помех, основываясь на этом результате определения.
- Определение взаимных помех, основываясь на перекрытии рабочих периодов
Например, блок 320 управления определяет, что существует вероятность взаимных помех в случае, когда рабочий период системы 10 радиосвязи, которая должна управляться, может, по меньшей мере, частично перекрываться с рабочими периодами других систем 10 радиосвязи. Блок 320 управления определяет перекрытие рабочих периодов, основываясь на сетевой информации, и определяет вероятность взаимных помех, основываясь на этом результате определения.
Используемая полоса частот, рабочее местоположение и рабочий период были описаны выше как пример критериев для определения вероятности взаимных помех. Блок 320 управления может использовать эти критерии определения в комбинации. Например, блок 320 управления может определить, что существует вероятность взаимных помех в случае, когда, по меньшей мере, один из этих критериев удовлетворяется. Дополнительно, блок 320 управления может определить, что не существует вероятности взаимных помех в случае, когда по меньшей мере один из этих критериев отличается или перекрытие равно или меньше заданного отношения.
- Отношение перекрытия используемых полос частот
Блок 320 управления может принять решение о рабочем режиме, основываясь на отношении используемой полосы частот системы 10 радиосвязи, которая должна управляться, перекрывающейся с используемыми полосами частот других систем 10 радиосвязи. Блок 320 управления вычисляет отношение перекрытия полос частот, основываясь на сетевой информации каждой системы 10 радиосвязи. Здесь далее это отношение будет также упоминаться как отношение перекрытия полос пропускания (overlap bandwidth ratio, OBWR). Существуют различные способы перекрытия полос частот и различные способы вычисления отношения OBWR. Конкретные примеры будут описаны ниже со ссылкой на фиг. 24-27.
На фиг. 24-27 представлен пример вычисления отношения перекрытия используемых полос частот. В примерах, показанных на фиг. 24-27, часть внутриполосного излучения перекрывается с используемыми полосами частот двух систем 10 радиосвязи. Дополнительно, на каждом чертеже верхняя часть указывает полосу частот, используемую другой системой 10 радиосвязи, которая не управляется, а нижняя часть указывает полосу частот, используемую системой 10 радиосвязи, которая должна управляться. Дополнительно, F1L и F1H, соответственно, указывают нижний предел и верхний предел используемой полосы частот другой системы 10 радиосвязи. Аналогичным способом, F2L и F2H, соответственно, указывают нижний предел и верхний предел используемой полосы частот системы 10 радиосвязи, которая должна управляться. Уравнение для вычисления OBWR, приведенное на чертеже, является уравнением для вычисления отношения OBWR перекрытия полос частот. Здесь, отношение перекрытия вычисляется, используя ширину полосы, используемую другой системой радиосвязи в качестве эталона (знаменатель).
Более конкретно, в примере на фиг. 24, отношение OBWR вычисляется из (F1H - F2L)/(F1H-F1L). В примере на фиг. 25 отношение OBWR вычисляется из (F2H - F1L)/(F1H - F1L). В примере на фиг. 26 отношение OBWR вычисляется из (F2H - F2L)/(F1H - F1L). В примере на фиг. 27 отношение OBWR вычисляется из (F2H - F2L)/(F1H - F1L).
Например, блок 320 управления определяет рабочий режим, основываясь на том, превышает ли расчетное отношение OBWR порог λ. Например, блок 320 управления определяет режим скачкообразной перестройки частоты как рабочий режим в случае, когда отношение OBWR превышает порог λ и определяет обычный режим как рабочий режим в случае, когда отношение OBWR равно или меньше порога λ. Порог λ может быть получен, например, от DB 400 и т. п. Дополнительно, порог λ может быть отличным для других систем 10 радиосвязи, для которых должны делаться вычисления.
Заметим, что хотя на фиг. 24-27, в отношении F1L, F1H и т. п., используется эталон, соответствующий ширине полосы 3 дБ, такой способ установки значения не является обязательным. В качестве другого способа установки F1L, F1H и т. п. может, например, устанавливаться значение, также учитывающее внеполосное излучение. Дополнительно, F1L, F1H и т. п., предпочтительно регистрируются в DB 400 для каждой системы радиосвязи и предоставляются как часть сетевой информации. Дополнительно, в отличие от примеров, показанных на фиг. 24-27, возможен, например, случай, когда используемые полосы частот этих двух систем 10 радиосвязи полностью совпадают, а также возможен случай, когда внутриполосное излучение перекрывается со внеполосным излучением и т. п.
Выше был описан пример критериев для принятия решения о рабочем режиме.
Функция принятия решения о шаблоне скачкообразной перестройки частоты
Блок 320 управления принимает решение об информации, относящейся к шаблону скачкообразной перестройки частоты, согласно информации системы 10 радиосвязи, с которой, вероятно, будет создавать взаимные помехи система 10 радиосвязи, которая должна управляться.
Например, блок 320 управления определяет полосу частот, в которой выполняется скачкообразная перестройка частоты в соответствии с сетевой информацией системы 10 радиосвязи, с которой, вероятно, будет создавать взаимные помехи система 10 радиосвязи, которая должна управляться. Конкретно, например, блок 320 управления принимает решение выполнить скачкообразную перестройку частоты в полосе частот, которая перекрывается с полосами частот, используемыми другими системами 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи. Таким образом, можно понизить взаимные помехи с другими системами 10 радиосвязи. Дополнительно, система 10 радиосвязи, которая должна управляться, может использовать больше радиоресурсов, в то время, как создаются взаимные помехи с другими системами 10 радиосвязи. Пример скачкообразной перестройки частоты в случае, когда такое управление выполняется, будет описан со ссылкой на фиг. 28 и 29.
На фиг. 28 и 29 представлен пример шаблона скачкообразной перестройки частоты в системе 10 радиосвязи, которая должна управляться в соответствии с настоящим вариантом осуществления. В примере, показанном на фиг. 28, система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты в полосах частот, используемых другими системами 10 радиосвязи, так чтобы часть полосы частот, которая не используется системами 10 радиосвязи, могла быть частично использована. В примере, показанном на фиг. 29, система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты в полосах частот, используемых другими системами 10 радиосвязи, так чтобы вся полоса частот, которая не используется системами 10 радиосвязи, могла быть использована. Заметим, что блок 320 управления может принять решение выполнить скачкообразную перестройку частоты в полосе, отличной от полосы частот, которая перекрывается с полосами частот, используемыми другими системами 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи, или может принять решение не выполнять скачкообразную перестройку частоты в перекрывающейся области.
В то время, как выше были описаны полосы частот систем 10 радиосвязи, которые, вероятно, должны создавать взаимные помехи, блок 320 управления может определить другую информацию, относящуюся к скачкообразной перестройке частоты, в соответствии с сетевой информацией систем 10 радиосвязи, с которыми система 10 радиосвязи, которая должна управляться, вероятно должна создавать взаимные помехи.
Например, блок 320 управления может определить временной слот, в котором система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты в соответствии с временным слотом, в котором работают системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи. Конкретно, блок 320 управления может определить временной слот, в котором выполняется скачкообразная перестройка частоты, с тем, чтобы скачкообразная перестройка частоты выполнялась во временном слоте, который перекрывается с временным слотом, в котором работают системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи, или с временными слотами до и после временного слота. Таким образом можно уменьшить взаимные помехи с другими системами 10 радиосвязи. Дополнительно, система 10 радиосвязи, которая должна управляться, может использовать больше радиоресурсов.
Например, блок 320 управления может определять местоположение, где система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты, в соответствии с теми местоположениями, где работают системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи. Конкретно, блок 320 управления может определить местоположение, в котором скачкообразная перестройка частоты выполняется так, чтобы скачкообразная перестройка частоты выполнялась в месте, которое перекрывается с местами, где работают системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи, или с местами, находящимися вблизи таких мест. Это означает, что можно уменьшить взаимные помехи с другими системами 10 радиосвязи. Дополнительно, система 10 радиосвязи, которая должна управляться, может использовать больше радиоресурсов.
Блок 320 управления определяет шаблон скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой системой 10 радиосвязи, которая должна управляться. Например, блок 320 управления может определить шаблон скачкообразной перестройки частоты, выполняемой системой 10 радиосвязи, которая должна управляться, в соответствии с шаблоном скачкообразной перестройки частоты, выполняемой другими системами 10 радиосвязи, которые, вероятно, должны создавть взаимные помехи. Конкретно, блок 320 управления может определить шаблон скачкообразной перестройки, отличающийся от шаблонов скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой другими системами 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи, в качестве шаблона скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой системой 10 радиосвязи, которая должна управляться. В этом случае можно уменьшить вероятность перекрытия и наложения шаблонов скачкообразной перестройки частоты, с тем, чтобы было возможно дополнительно уменьшить взаимные помехи. Заметим, что для того, чтобы легче было принимать решение о различных шаблонах, количество шаблонов скачкообразной перестройки частоты предпочтительно ограничивается конечным числом.
- Случай, когда система радиосвязи использует множество полос частот
Система 10 радиосвязи может использовать множество полос частот. Например, в сотовой системе множество полос частот используется при технологии агрегации несущих. В случае, когда используется множество полос частот, существует вероятность, что одна из множества полос частот, используемых системой 10 радиосвязи, может перекрываться с полосами частот, используемыми другими системами 10 радиосвязи. В этом случае, блок 320 управления может решить применить скачкообразную перестройку частоты в полосе частот, которая является той же самой, что и полосы частот, используемые другими системами 10 радиосвязи. Таким образом, можно уменьшить взаимные помехи с другими системами 10 радиосвязи в части, где полосы частот перекрываются, и избежать ненужной скачкообразной перестройки частоты в части, где полосы частот не перекрываются. Такой случай будет конкретно описан ниже со ссылкой на фиг. 30.
На фиг. 30 представлен пример, в котором используемые полосы частот двух систем 10 радиосвязи частично перекрываются. На фиг. 30 верхняя часть указывает полосу частот, используемую другой системой 10 радиосвязи, которая не должна управляться, а нижняя часть указывает полосу частот, используемую системой 10 радиосвязи, которая должна управляться. Как показано на фиг. 30, система 10 радиосвязи, которая должна управляться, использует две полосы частот F1 и F2. Полоса частот F1 используется первичной ячейкой и/или базовой станцией № 1, а полоса частот F2, используется вторичной ячейкой и/или базовой станцией № 2. Как показано на фиг. 30, полоса частот F2, используемая вторичной ячейкой и/или базовой станцией № 2, перекрывается с используемой полосой частот F1 другой системы 10 радиосвязи. Поэтому, блок 320 управления принимает решение, что вторичная ячейка и/или базовая станция № 2 выполняет скачкообразную перестройку частоты и первичная ячейка и/или базовая станция № 1 не выполняет скачкообразную перестройку частоты. Таким образом, скачкообразная перестройка частоты выполняется в полосе частот F2 и взаимные помехи с другой системой 10 радиосвязи снижаются. Дополнительно, можно избежать ненужного процесса скачкообразной перестройки частоты в полосе частот F1.
Заметим, что система 10 радиосвязи, которая должна управляться, может сообщить каждому узлу связи информацию установки скачкообразной перестройки частоты в отношении части, где полосы частот перекрываются, используя часть, в которой полосы частот не перекрываются. Например, в примере, показанном на фиг. 30, система 10 радиосвязи, которая должна управляться, сообщает каждому узлу связи информацию установки скачкообразной перестройки частоты в отношении полосы частот F2, используя полосу частот F1. В этом случае, например, канал управления или широковещательный канал могут использоваться в полосе частот F1. Такой случай будет конкретно описан ниже со ссылкой на фиг. 31.
На фиг. 31 представлен пример, в котором используемые полосы частот двух систем 10 радиосвязи частично перекрываются. На фиг. 31 показано сообщение информации установки скачкообразной перестройки частоты в системе 10 радиосвязи, которая должна управляться, и пример радиоресурса используется передачи данных, выполняя скачкообразную перестройку частоты в примере, показанном на фиг. 30. Полосы частот F1 и F2 на чертеже являются теми же самыми, которые использовались на фиг. 30. Как показано на фиг. 31, система 10 радиосвязи, которая должна управляться, выполняет сообщение информации установки скачкообразной перестройки частоты в отношении полосы частот F2, используя канал управления (и DCI) полосы частот F1. Дополнительно, как показано на фиг. 31, система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты в полосе частот F2, основываясь на информации установки скачкообразной перестройки частоты, сообщенной, используя канал управления (и DCI) полосы частот F1.
Функция формирования информации установки скачкообразной перестройки частоты
Блок 320 управления определяет шаблон скачкообразной перестройки частоты, используемый системой 10 радиосвязи, которая должна управляться, и формирует информацию установки скачкообразной перестройки частоты, указывающую определенный шаблон скачкообразной перестройки частоты. Пример информации установки скачкообразной перестройки частоты приводится в следующей таблице.
Таблица 7
- Информация, указывающая включение/выключение скачкообразной перестройки частоты
- Информация, указывающая включение/выключение скачкообразной перестройки частоты является информацией, указывающей, выполняет ли скачкообразную перестройку частоты система 10 радиосвязи, которая должна управляться, и информацией, указывающей рабочий режим, определенный описанной выше функцией определения рабочего режима. Например, информация указывает ON (включено) в случае режима скачкообразной перестройки частоты и указывает OFF (выключено) в случае обычного режима.
- Информация, указывающая шаблон скачкообразной перестройки частоты
Информация, указывающая шаблон скачкообразной перестройки частоты, является информацией, указывающей шаблон скачкообразной перестройки частоты, выполняемой системой 10 радиосвязи, которая должна управляться. Существуют различные возможные способы указания шаблона скачкообразной перестройки частоты. Как пример, блок 320 управления принимает решение о шаблоне, используя параметры, относящиеся к одной или более категориям, определяющим шаблон скачкообразной перестройки частоты, и выполняет уведомление о параметрах как об информации, указывающей шаблон скачкообразной перестройки частоты. Блок 320 управления может более просто принять решение о шаблоне и выполнить уведомление, используя параметры в качестве информации, указывающей шаблон скачкообразной перестройки частоты. Информацией, указывающей шаблон скачкообразной перестройки частоты, может быть индекс, указывающий любой из возможных шаблонов скачкообразной перестройки частоты при ограничении конечного количества шаблонов. В этом случае можно дополнительно упростить процесс определения шаблона и выполнения уведомления.
Предпочтительно использовать параметры, относящиеся к различным категориям. Как пример, блок 320 управления может использовать параметры, относящиеся к четырем категориям, указанным в следующей таблице.
Таблица 8
Параметры "направление частоты при скачкообразной перестройке частоты" являются параметрами, которые определяют скачкообразную перестройку в частотном и частоты, и могут находиться в различных блоках, таких как блок поднесущих, блок ресурсных блоков, блок компонентных несущих и т. п. Параметры "направление времени при скачкообразной перестройке частоты" являются параметрами, которые определяют скачкообразную перестройку в направлении времени и могут присутствовать в различных блоках, таких как блок символов, блок слотов, блок субкадров и т. п. Параметры "начального смещения скачкообразной перестройки частоты" являются параметрами, определяющими исходное состояние направления частоты или направления времени и могут находиться в различных блоках, таких как блок поднесущих, блок ресурсных блоков, блокомпонентных несущих и т. п. Заметим, что блок "направление частоты при скачкообразной перестройке частоты" предпочтительно является тем же самым, что и блок "смещения при скачкообразной перестройке частоты". Параметры "направление движения частоты при скачкообразной перестройке частоты" являются параметрами, которые определяют направление скачкообразного движения в направлении частоты и могут быть положительным направлением (скачкообразное движение от полосы низкой частоты к полосе высокой частоты) или отрицательным направлением (скачкообразное движение от полосы высокой частоты к полосе низкой частоты).
Блок 320 управления может принять решение о шаблоне скачкообразной перестройки частоты, выбирая описанные выше четыре параметра из конечного числа кандидатов. Поскольку количество возможных значений параметров конечно, количество шаблонов скачкообразной перестройки частоты, которые могут использоваться, становится конечным. Кандидаты на это конечное количество предпочтительно определяются заранее в системе 10 радиосвязи, которая должна управляться. Конечно, кандидаты не ограничиваются кандидатами конечного количества и блок 320 управления может принять решение о произвольном значении. Пример кандидатов, относящихся каждому параметру, указывается в следующей таблице.
Таблица 9
Дополнительно, пример шаблона скачкообразной перестройки частоты, использующего четыре параметра, приводится в следующей таблице.
Таблица 10
"Шаблон №" является информацией, указывающей индекс шаблона скачкообразной перестройкИ частоты. Здесь на фиг. 4 показан шаблон скачкообразной перестройки частоты, использующий № 7, на фиг. 5 показан шаблон скачкообразной перестройки частоты, использующий № 9, и на фиг. 6 показан шаблон скачкообразной перестройки частоты, использующий № 10.
Шаблон скачкообразной перестройки частоты может быть также получен, используя расчетное уравнение с применением информации каждой категории. Например, в случае, когда индекс поднесущей перед применением скачкообразной перестройки в символе t равен kb(t), блок скачкообразной перестройки в направлении частоты равен Khop, блок в направлении времени равен Thop, смещение направления частоты равно Toff и количество поднесущих во всей системе равно Ktotal, индекс поднесущей ka (t) после применения скачкообразной перестройки в символе t может быть выражен следующим уравнением.
Уравнение 3
Здесь, информация об индексе kb(t) поднесущей до применения скачкообразной перестройки предпочтительно назначается отдельно посредством планирования. Например, в базовой системе LTE информация предпочтительно назначается каждому пользователю (терминалу пользователя), использующему канал управления (PDCCH) и т.п.
В качестве другого примера будет описан случай, в котором скачкообразная перестройка частоты выполняется в блоке ресурсного блока. Предполагается случай, в котором обычно назначают два слота для каждого пользователя в направлении времени. Передающая станция 200 вычисляет индекс ресурсного блока в направлении частоты, фактически используемом для передачи в назначенном первом слоте, используя следующие уравнения.
 Уравнение 4
Уравнение 4
 Уравнение 5
Уравнение 5
Здесь,

Уравнение 6
Заметим, что

Уравнение 7
является начальным смещением скачкообразной перестройки частоты. Дополнительно,

Уравнение 8
является индексом ресурсного блока, временно присвоенного прежде, чем позиция со скачкообразной перестройкой частот будет определена. Здесь,
 Уравнение 9
Уравнение 9
и оба члена сообщаются как информация установки скачкообразной перестройки частоты.
С другой стороны, передающая станция 200 вычисляет индекс ресурсного блока ресурса в направлении частоты, фактически используемом для передачи в назначенном втором слоте, используя следующие уравнения.
 Уравнение 10
Уравнение 10
 Уравнение 11
Уравнение 11
где информация, касающаяся позиции со скачкообразной перестройкой частоты
 Уравнение 12
Уравнение 12
назначается как информация установки скачкообразной перестройки частоты, и назначается, например, основываясь на таблице, указанной ниже как пример, который определяется в пределах системы 1 связи.
Таблица 11

Заметим, что в приведенной выше таблице, принимается, что
 Уравнение 13
Уравнение 13
Дополнительно, в той же самой таблице, в случае, когда указывается шаблон, соответствующий "отдельно назначенному", информация, относящаяся к позициям скачкообразной перестройки частоты в назначенных первом слоте и втором слоте, получается, используя следующие уравнения.
 Уравнение 14
Уравнение 14
Уравнение 15
Заметим что ns является индексом слота. Индекс слота здесь не означает первый слот или второй слот, назначенный пользователю, а означает, например, индекс слота внутри радиокадра. Дополнительно, Nsb является количеством поддиапазонов. Поддиапазон здесь означает совокупность в случае, когда совокупность образует определенное количество ресурсов. Дополнительно, c(i) является псевдослучайной последовательностью. Дополнительно, nVRB является индексом ресурсного блока, временно назначенным перед тем, как будет определена позиция скачкообразной перестройки частоты. Дополнительно, CURRENT_TX_NB является номером передачи транспортного блока, который должен передаваться. Здесь, Nsb, c(i), nVRB и CURRENT_TX_NB все вместе сообщаются как информация установки скачкообразной перестройки частоты.
- Информация, указывающая полосу частот, временной слот и местоположение, в котором выполняется скачкообразная перестройка частоты
Информацией, указывающей полосу частот, время и местоположение, где выполняется скачкообразная перестройка частоты, является информация для ограничения полосы частот, времени и местоположения, когда система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты. Как описано выше, блок 320 управления может определить эту информацию, так чтобы скачкообразная перестройка частоты выполнялась только в полосе частот, времени и местоположении, где существует вероятность взаимных помех. Таким образом, система 10 радиосвязи, которая должна управляться, может использовать больше радиоресурсов, снижая взаимные помехи с другими системами 10 радиосвязи.
2-4. DB
На фиг. 32 приведена блок-схема примера логической конфигурации DB 400 в соответстви с настоящим вариантом осуществления. Как показано на фиг. 32, DB 400, соответствующая настоящему варианту осуществления, содержит блок 410 связи, блок 420 управления и блок 430 запоминающего устройства.
2-4-1. Блок связи
Блок 410 связи является интерфейсом связи, через который осуществляется промежуточное соединение между DB 400 и другими устройствами. Блок 410 связи передает/принимает данные при связи с другими устройствами проводным или беспроводным способом.
Например, блок 410 связи осуществляет связь с устройством 300 управления связью. Например, блок 410 связи принимает запрос сетевой информации от устройства 300 управления связью. Дополнительно, блок 410 связи передает регистрационную информацию DB устройству 300 управления связью. Блок 410 связи может использовать ту же самую частоту, что и используемая полоса частот каждой системы 10 радиосвязи, чтобы передавать регистрационную информацию DB, или может использовать другую полосу частот. Кроме того, блок 410 связи принимает информацию, указывающую частотный шаблон, от устройства 300 управления связью.
2-4-2. Блок управления
Блок 420 управления, который функционирует как арифметическое процессорное устройство и устройство управления, управляет всей работой внутри DB 400 в соответствии с различными видами программ. Блок 420 управления реализуется электронной схемой, такой как, например, CPU и микропроцессор. Заметим, что блок 420 управления может содержать ROM, которое хранит программу, рабочий параметр и т. п., которые должны использоваться, и RAM, которое временно хранит параметр и т. п., изменяющиеся должным образом.
Блок 420 управления передает обратно регистрационную информацию DB, хранящуюся в запоминающем устройстве 430, в ответ на запрос сетевой информации, полученный от устройства 300 управления связью блоком 410 связи. Дополнительно, блок 420 управления управляет DB 400, чтобы записывать сетевую информацию каждой системы 10 радиосвязи, полученную извне блоком 410, в качестве регистрационной информации DB. Например, блок 420 управления записывает/обновляет информацию, указывающая шаблон частоты, полученный от устройства 300 управления связью блоком 410 связи в качестве регистрационной информации DB.
Заметим, что блок 420 управления может иметь функцию блока 320 управления устройства 300 управления связью.
2-4-3. Запоминающее устройство
Запоминающее устройство 430 является блоком, который записывает и воспроизводит данные на заданном носителе записи. Запоминающее устройство 430 реализуется, например, в виде жесткого диска (HDD). Конечно, в качестве носителя записи существуют различные возможные типы носителей записи, такие как твердотельная память, такие как флэш-память, карта памяти, в которой содержится твердотельная память, оптический диск, магнитооптический диск и голографическая память. Необходимо только лишь конфигурировать запоминающее устройство 430, чтобы иметь возможность выполнять запись и воспроизведение согласно используемому носителю записи.
Запоминающее устройство 430 хранит сетевую информацию каждой системы 10 радиосвязи в качестве регистрационной информации DB.
2-5. Устройство датчика
На фиг. 33 представлена блок-схема примера логической конфигурации устройства 500 датчика, соответствующего настоящему варианту осуществления. Как показано на фиг. 33, устройство 500 датчика, соответствующее настоящему варианту осуществления, содержит блок 510 связи, блок 520 управления и блок 530 датчика.
2-5-1. Блок связи
Блок 510 связи является интерфейсом, который в качестве промежуточного устройства осуществляет связь устройством 500 датчика и другими устройствами. Блок 510 связи передает/принимает данные связи с другими устройствами проводным или беспроводным способом.
Например, блок 510 связи осуществляет связь с устройством 300 управления связью. Например, блок 510 связи принимает запрос сетевой информацит от устройства 300 управления связью. Дополнительно, блок 510 связи передает информацию обнаружения устройству 300 управления связью. Заметим, что блок 510 связи может передавать информацию обнаружения DB 400 и передавать информацию обнаружения устройству 300 управления связью через DB 400. Блок 410 связи может использовать ту же самую полосу частот, что и используемая полоса частот каждой системы 10 радиосвязи, или может использовать для передачи информации обнаружения другую полосу частот.
2-5-2. Блок управления
Блок 520 управления, который функционирует как арифметическое процессорное устройство и устройство управления, управляет всей работой внутри устройства 500 датчика в соответствии с различными видами программ. Блок 420 управления реализуется электронной схемой, такой как, например, CPU и микропроцессор. Заметим, что блок 520 управления может содержать ROM, которое хранит программу, рабочий параметр и т. п., которые должны использоваться, и RAM, которое временно хранит параметр и т. п., изменяющиеся должным образом.
Например, блок 520 управления управляет блоком 510 связи, чтобы передавать информацию обнаружения, полученную блоком 530 датчика, устройству 300 управления связью в ответ на запрос сетевой информации от устройства 300 управления связью.
Блок 520 управления может управлять блоком 530 датчика, чтобы периодически получать информацию обнаружения, или может управлять блоком 530 датчика, чтобы получать информацию обнаружения, активируясь приемом запроса от сервера 300. Блок 520 управления управляет блоком 510 связи, чтобы передавать полученную информацию обнаружения устройству 300 управления связью периодически или в ответ на запрос. Устройство 500 датчика может иметь запоминающее устройство, чтобы накапливать полученную информацию обнаружения и передавать накопленную информацию обнаружения устройству 300 управления связью.
Заметим, что блок 520 управления может иметь функцию блока 320 управления устройства 300 управления связью.
2-5-3. Блок датчика
Блок 530 датчика обладает функцией получения информации обнаружения. Например, блок 530 датчика получает информацию обнаружения, измеряя уровень принятого радиосигнала для каждой полосы частот. Заметим, что блок 530 датчика может получать информацию обнаружения для других систем 10 радиосвязи, а также информацию обнаружения системы 10 радиосвязи, которая должна управляться. Дополнительно, блок 530 датчика может обнаруживать полосу частот, которая шире, чем полоса частот, используемая системой 10 радиосвязи, которая должна управляться, устройством 300 управления связью, основываясь на управлении, осуществляемом блоком 520 управления. В этом случае устройство 300 управления связью может определить, что существует система 10 радиосвязи, которая изменяет используемую полосу частот во времени, как в радиолокационной системе. Дополнительно, блок 530 датчика может разделять полосу частот на множество полос и обнаруживать полосы. В этом случае устройство 300 управления связью может выполнять процесс определения, действительно ли система 10 радиосвязи легче изменяет используемую полоса частот во времени.
Выше был описан пример конфигурации каждого компонента, содержащегося в системе 1 связи в соответствии с настоящим вариантом осуществления. В дальнейшем порядок работы системы 1 связи 1 в соответствии с настоящим вариантом осуществления будет описан со ссылкой на фиг. 34-54.
3. Порядок работы
3-1. Процесс управления системой радиосвязи
Сначала, со ссылкой на фиг. 34 и 35 будет представлена общая картина порядка работы системы 1 связи в соответствии с настоящим вариантом осуществления. Порядок работы системы 1 связи может принимать различные формы, в соответствии с которыми узел связи функционирует как устройство управления связью, передающая станция или приемная станция. Пример процесса порядка работы будет описан ниже.
Пример 1 процесса
На фиг. 34 представлена схема последовательности выполнения операций, иллюстрирующая пример процесса выполнения операций управления системой радиосвязи в системе 1 связи в соответствии с настоящим вариантом осуществления. Как показано на фиг. 34, эта последовательность операций содержит приемную станцию 100, передающую станцию 200 и сервер 300. В этом примере процесса сервер 300 функционирует как устройство управления связью. Дополнительно, предполагается, что приемная станция 100 и передающая станция 200 содержатся в составе системы 10 радиосвязи, которая должна управляться.
Как показано на фиг. 34, сначала на этапе S102 сервер 300 передает запрос сетевой информации. Сервер 300, например, передает запрос передающей станции 200 и передающая станция 200 транслирует принятый запрос приемной станции 100.
Затем, на этапе S104 передающая станция 200 передает серверу 300 в ответ информацию обнаружения. Передающая станция 200 может периодически получать информацию обнаружения или может получать информацию обнаружения, активируясь посредством приема запроса от сервера 300.
Аналогичным образом, на этапе S106 приемная станция 100 передает в ответ обратно на сервер 300 информацию обнаружения. В примере, показанном на фиг. 34, приемная станция 100 передает информацию обнаружения передающей станции 200 и передающая станция 200 транслирует принятую информация обнаружения серверу 300.
Затем, на этапе S108 сервер 300 выполняет процесс принятия решения о рабочем режиме, основываясь на принятой информации обнаружения. Сервер 300 принимает решение о режиме скачкообразной перестройки частоты или об обычном режиме в качестве режима работы системы 10 радиосвязи, которая должна управляться, посредством процесса принятия решения о режиме работы. Поскольку процесс будет описан здесь позже в разделе "3-2. Процесс принятия решения о режиме работы", его подробное описание здесь не приводится. Пример порядка работы в случае, когда сервер 300 принимает решение о режиме скачкообразной перестройки частоты в качестве режима работы системы 10 радиосвязи, которая должна управляться, будет описан ниже.
На этапе S110 сервер 300 выполняет процесс принятия решения об установке скачкообразной перестройки частоты. Сервер 300 определяет шаблон скачкообразной перестройки частоты, который должен использоваться системой 10 радиосвязи, которая должна управляться, посредством процесса принятия решения о скачкообразной перестройке частоты и устанавливает информацию установки скачкообразной перестройки частоты. Поскольку процесс здесь будет описана позже в разделе "3-7. Процесс принятия решения об установке скачкообразной перестройки частоты", подробное описание здесь не приводится.
Затем, на этапе S112 сервер 300 передает сформированную информацию установки скачкообразной перестройки частоты. В примере, показанном на фиг. 34, сервер 300 передает информацию установки скачкообразной перестройки частоты передающей станции 200 и передающая станции 200 транслирует принятую информация установки скачкообразной перестройки частоты приемной станции 100.
Затем, на этапе S114 передающая станция 200 декодирует принятую информацию установки скачкообразной перестройки частоты.
Аналогичным образом, на этапе S116 приемная станция 100 декодирует принятую информацию установки скачкообразной перестройки частоты.
Затем, на этапе S118 передающая станция 200 устанавливает схему скачкообразной перестройки частоты в соответствии с декодированной информацией установки скачкообразной перестройки частоты. Например, передающая станция 200 выполняет установку таким образом, что скачкообразная перестройка частоты выполняется, используя радиоресурс в соответствии с правилом, указанным в информации установки скачкообразной перестройки частоты.
Затем, на этапе S120 передающая станция 200 передает данные, в то же время выполняя скачкообразную перестройку частоты, используя установленную схему скачкообразной перестройки частоты. Например, передающая станция 200 передает данные, в то же время выполняя скачкообразную перестройку частоты, используя указанный шаблон скачкообразной перестройки частоты в полосе частот, временном слоте и местоположении, указанных в информации установки скачкообразной перестройки частоты.
Затем, на этапе S122 приемная станция 100 декодирует данные, основываясь на декодированной информации установки скачкообразной перестройки частоты. Например, приемная станция 100 выполняет процесс декодирования, чтобы получить данные, предполагая, что передающая станция 200 передает данные в то время, когда выполняется скачкообразная перестройка частоты, используя информацию установки скачкообразной перестройки частоты, принятую на этапе S112.
Выше был описан пример последовательности выполнения операций процесса управления системой радиосвязи.
Пример 2 процесса
На фиг. 35 представлена последовательность выполнения операций примера процесса управления системой радиосвязи, выполняемого в системе 1 связи в соответствии с настоящим вариантом осуществления. Как показано на фиг. 35, эта последовательность выполнения операций содержит приемную станцию 100, передающую станцию 200 и DB 400. В этом примере процесса передающая станция 200 функционирует как устройство управления связью. Дополнительно, предполагается, что приемная станция 100 и передающая станция 200 входят в состав системы 10 радиосвязи, которая должна управляться.
Как показано на фиг. 35, сначала на этапе S202 передающая станция 200 передает запрос сетевой информации к DB 400.
Затем, на этапе S204 передающая станция 200 получает регистрационную информацию DB от DB 400.
Затем, на этапе S206 передающая станция 200 выполняет процесс принятия решения о рабочем режиме, основываясь на полученной регистрационной информации DB. Передающая станция 200 принимает решение о режиме скачкообразной перестройки частоты или об обычном режиме в качестве рабочего режима системы 10 радиосвязи, которая должна управляться, то есть, системы 10 радиосвязи, к которой непосредственно принадлежит передающая станция 200, посредством процесса принятия решения о рабочем режиме. Пример порядка работы в случае, когда передающая станция 200 принимает решение о режиме скачкообразной перестройки частоты в качестве рабочего режима системы 10 радиосвязи, которая должна управляться, будет описан ниже.
На этапе S208 передающая станция 200 выполняет процесс принятия решения об установке скачкообразной перестройки частоты. Передающая станция 200 определяет шаблон скачкообразной перестройки частоты, используемой системой 10 радиосвязи, которая должна управляться, посредством процесса принятия решения об установке скачкообразной перестройки частоты и формирует информацию установки скачкообразной перестройки частоты.
Затем на этапе S210 передающая станция 200 передает ссформированную информацию установки скачкообразной перестройки частоты приемной станции 100.
Затем, на этапе S212 приемная станция 100 декодирует принятую информацию установки скачкообразной перестройки частоты.
Затем, на этапе S214 передающая станция 200 устанавливает схему скачкообразной перестройки частоты в соответствии со сформированной информацией установки скачкообразной перестройки частоты.
Затем, на этапе S216 передающая станция 200 передает данные в то время, когда выполняется скачкообразная перестройка частоты, используя установленную схему скачкообразной перестройки частоты.
Затем, на этапе S218 приемная станция 100 декодирует данные, основываясь на декодированной информации установки скачкообразной перестройки частоты.
Выше был описан пример последовательности выполнения операций процесса управления системы радиосвязи.
3-2. Процесс принятия решения о рабочем режиме
Далее процесс принятия решения о режиме работы устройством 300 управления связью в соответствии с настоящим вариантом осуществления будет описан со ссылкой на фиг. 36-42. Этот процесс может принимать различные формы. Ниже будет описан пример процесса.
Пример 1 процесса
На фиг. 36 представлена блок-схема последовательности выполнения операций процесса принятия решения о рабочем режиме, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 36, сначала на этапе S302 блок 320 управления определяет, нужно ли получить сетевую информацию. Например, блок 320 управления определяет, нужно ли получить сетевую информацию, основываясь на правилах радиосвязи, таких как американский федеральный закон SAS и европейская LSA, тех стран, в которых используется система 10 радиосвязи.
В случае, когда определено, что необходимо получить сетевую информацию (S302/Да), на этапе S304 блок 320 управления выполняет процесс получения сетевой информации. Поскольку этот процесс будет описан позже в разделе "3-3. Процесс получения сетевой информации", его подробное описание здесь не приводится. Блок 320 управления получает сетевую информацию посредством процесса получения сетевой информации.
Затем, на этапе S306 блок 320 управления принимает решение о режиме скачкообразной перестройки частоты в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
С другой стороны, когда определено, что нет необходимости получать сетевую информацию (S302/No), на этапе S308 блок 320 управления принимает решение об обычном режиме в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
Выше была описана последовательность выполнения операций процесса принятия решения о рабочем режиме.
Пример 2 процесса
На фиг. 37 представлен блок-схема последовательности выполнения операций примера процесса принятия решения о рабочем режиме, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 37, сначала на этапе S402 блок 320 управления определяет, нужно ли получать сетевую информацию.
Когда определено, что получить сетевую информацию нужно (S402/Да), на этапе S404 блок 320 управления выполняет процесс получения сетевой информации.
Затем, на этапе S406 блок 320 управления определяет, существует ли вероятность присутствия других систем 10 радиосвязи с более высоким приоритетом, чем у системы 10 радиосвязи, которая должна управляться. Например, блок 320 управления из полученной сетевой информации определяет вероятность присутствия других систем 10 радиосвязи с более высоким приоритетом.
В случае, когда определено, что существует вероятность присутствия других систем 10 радиосвязи с более высоким приоритетом, чем у системы 10 радиосвязи, которая должна управляться, (S406/Да), на этапе S408 блок 320 управления принимает решение о режиме скачкообразной перестройки частоты в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
С другой стороны, в случае, когда определено, что нет необходимости получать сетевую информацию (S402/Нет) или в случае, когда определено, что не существует вероятности присутствия других систем 10 радиосвязи с более высоким приоритетом, чем у системы 10 радиосвязи, которая должна управляться, (S406/Нет), на этапе S410 блок 320 управления принимают решение об обычном режиме в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
Выше был описан пример последовательности выполнения операций процесса принятия решения о рабочем режиме.
Пример 3 процесса
На фиг. 38 представлена блок-схема последовательности выполнения операций примера процесса принятия решения о рабочем режиме, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 38, сначала на этапе S502 блок 320 управления выполняет процесс получения сетевой информации.
Затем, на этапе S504 блок 320 управления выполняет процесс определения взаимных помех. Блок 320 управления определяет, существуют ли другие системы 10 радиосвязи, с которыми система 10 радиосвязи, которая должна управляться, вероятно, будет создавать взаимные помехи, посредством процесса определения взаимных помех. Поскольку процесс будет описан здесь позже в разделе "3-4. Процесс определения взаимных помех", его подробное описание здесь не приводится.
В случае, когда определено, что существуют другие системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи (S506/Да), на этапе S508 блок 320 управления определяет режим скачкообразной перестройки частоты в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
С другой стороны, в случае, когда определено, что не существует других систем 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи (S506/Нет), на этапе S510 блок 320 управления принимает решение об обычном режиме в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
Выше был описан пример последовательности выполнения операций процесса принятия решения о рабочем режиме.
Пример 4 процесса
На фиг. 39 представлена блок-схема последовательности выполнения операций примера процесса принятия решения о рабочем режиме, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 39, сначала на этапе S602 блок 320 управления выполняет процесс получения сетевой информации.
Затем, на этапе S604 блок 320 управления выполняет процесс определения взаимных помех.
В случае, когда определено, что существуют другие системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи, (S606/Да), на этапе S608 блок 320 управления определяет, существует ли вероятность присутствия других систем 10 радиосвязи с более высоким приоритетом, чем у системы 10 радиосвязи, которая должна управляться.
В случае, когда определено, что существует вероятность присутствия других систем 10 радиосвязи с более высоким приоритетом, чем у системы 10 радиосвязи, которая должна управляться, (S608/Да), на этапе S610 блок 320 управления принимает решение о режиме скачкообразной перестройки частоты в качестве режима работы системы 10 радиосвязи, которая должна управляться.
С другой стороны, в случае, когда определено, что нет никакой другой системы 10 радиосвязи, которая, вероятно, может создавать взаимные помехи, (S606/Нет), или в случае, когда определено, что нет вероятности присутствия других систем 10 радиосвязи с более высоким приоритетом, чем у системы 10 радиосвязи, которая должна управляться (S608/Нет), на этапе S612 блок 320 управления принимает решение об обычном режиме в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
Выше был описан пример последовательности выполнения операций процесса принятия решения о рабочем режиме.
Пример 5 процесса
На фиг. 40 представлена блок-схема последовательности выполнения операций примера процесса принятия решения, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 40, сначала на этапе S702 блок 320 управления выполняет процесс получения сетевой информации.
Затем, на этапе S704 блок 320 управления вычисляет отношение OBWR перекрытия используемых полос частот. Поскольку этот процесс будет описан позже, его подробное описание здесь не приводится.
Затем, на этапе S706 блок 320 управления определяет, является ли отношение OBWR большим, чем порог λ.
В случае, когда определено, что отношение OBWR больше порога λ, (S706/Да), на этапе S708 блок 320 управления принимает решение о режиме скачкообразной перестройки частоты в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
В случае, когда отношение OBWR равно или меньше порога λ (S706/No), на этапе S710 блок 320 управления принимает решение об обычном режиме в качестве режима работы системы 10 радиосвязи, которая должна управляться.
Выше был описан пример последовательности выполнения операций процесса принятия решения о рабочем режиме. Здесь, пример конкретной последовательности выполнения операций процесса вычисления отношения OBWR на этапе S704 будет описан со ссылкой на фиг. 41.
На фиг. 41 представлена блок-схема последовательности выполнения операций примера процесса вычисления отношения перекрытия используемых полос частот, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления. Заметим, что на этой блок-схеме процесс вычисления отношения OBWR будет описан, применяя символы F1H, F1L, F2H и F2L, использовавшиеся на фиг. 24-27.
Как показано на фиг. 41, сначала на этапе S802 блок 320 управления определяет, удовлетворяются ли условия (F1H <F2L) или (F2H <F1L). В случае, когда определено, что условия удовлетворяются (S802/Да), на этапе S804 блок 320 управления вычисляет OBWR = 0.0. С другой стороны, в случае, когда определено, что условия не удовлетворяются (S802/Нет), процесс переходит к этапу S806.
На этапе S806 блок 320 управления определяет, удовлетворяются ли условия (F1H ≥ F2L) и (F2H> F1L). В случае, когда определено, что условия удовлетворяются, (S806/Да), на этапе S808 блок 320 управления вычисляет OBWR = (F1H - F2L) / (F1H - F1L). С другой стороны, в случае, когда определено, что условия не удовлетворяются (S806/Нет), процесс переходит к этапу S810.
На этапе S810 блок 320 управления определяет, удовлетворяются ли условия (F2H ≥ F1L) и (F1H> F2L). В случае, когда определено, что условия удовлетворяются (S810/Да), на этапе S812 блок 320 управления вычисляет OBWR = (F1H - F2L) / (F1H - F1L). С другой стороны, в случае, когда определено, что условия не удовлетворяются (S810/Нет), процесс переходит к этапу S814.
На этапе S814 блок 320 управления определяет, удовлетворяются ли условия (F1L <F2L) и (F1H> F2H) или условия (F2L ≤ F1L) и (F2H ≥ F1H). В случае, когда определено, что условия удовлетворяются (S814/Да), на этапе S816 блок 320 управления вычисляет OBWR = (F2H - F2L) / (F1H - F1L). С другой стороны, в случае, когда определено, что условия не удовлетворяются (S810/Нет), процесс переходит к этапу S804. Заметим, что поскольку трудно предположить, что условия не удовлетворяются, блок 320 управления может пропустить процесс определения на этапе S814 и процесс может перейти к этапу S816.
Выше был описан процесс вычисления отношения OBWR.
Пример 6 процесса
На фиг. 42 представлена блок-схема примера последовательности выполнения операций процесса принятия решения о рабочем режиме, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 42, сначала на этапе S902 блок 320 управления выполняет процесс получения сетевой информации.
Затем, на этапе S904 блок 320 управления выполняет процесс определения взаимных помех.
В случае, когда определено, что существуют другие системы 10 радиосвязи, которые, вероятно, будут создавать взаимные помехи (S906/Да), на этапе S908 блок 320 управления вычисляет отношение OBWR перекрытия используемых полос частот.
Затем, на этапе S910 блок 320 управления определяет, является ли отношение OBWR большим, чем порог λ.
В случае, когда определено, что отношение OBWR больше порога λ (S910/Да), на этапе S912 блок 320 управления принимает решение о режиме скачкообразной перестройки частоты в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
В случае, когда определено, что отношение OBWR равно или меньше порога λ (S910/Нет), или в случае, когда определено, что нет никакой другой системы 10 радиосвязи, которая, вероятно, будет создавать взаимные помехи (S906/Нет), на этапе S914 блок 320 управления принимает решение об обычном режиме в качестве рабочего режима системы 10 радиосвязи, которая должна управляться.
Выше был описан пример последовательности выполнения операций процесса принятия решения о рабочем режиме.
3-3. Процесс получения сетевой информации
В дальнейшем, процесс получения сетевой информации устройством 300 управления связью в соответствии с настоящим вариантом осуществления будет описан со ссылкой на фиг. 43. Этот процесс может принимать различные формы. Например, устройство 300 управления связью может получать сетевую информацию в те моменты времени, когда это необходимо для получения сетевой информации, или в моменты времени, когда сетевая информация используется для процесса принятия решения о рабочем режиме, процесса определения взаимных помех и т. п. Помимо вышесказанного, устройство 300 управления связью может получать сетевую информацию периодически. Пример случая, когда сетевую информацию получают периодически, будет описан ниже.
На фиг. 43 представлена блок-схема примера последовательности выполнения операций процесса получения сетевой информации, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 43, сначала на этапе S1002 блок 320 управления устанавливает таймер для получения сетевой информации.
Затем, на этапе S1002 блок 320 управления работает в дежурном режиме, пока не истечет установленное таймером время (S1006/Нет).
В случае, когда время таймера истекает (S1006/Да), блок 320 управления получает сетевую информацию. Например, блок 320 управления передает запрос сетевой информации через блок 310 связи. Затем блок 320 управления получает по запросу от DB 400, по меньшей мере, регистрационную информацию DB или информацию обнаружения, получаемую по запросу от устройства 500 датчика.
Выше был описан пример последовательности выполнения операций процесса получения сетевой информации.
3-4. Процесс определения взаимных помех
Далее, процесс определения взаимных помех устройством 300 управления связью в соответствии с настоящим вариантом осуществления будет описан со ссылкой на фиг. 44. Этот процесс может принимать различные формы. Пример процесса будет описан ниже.
На фиг. 44 представлена блок-схема последовательности выполнения операций примера процесс определения взаимных помех, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 44, сначала на этапе S1102 блок 320 управления определяет, использует ли система 10 радиосвязи, которая должна быть подвергнута процессу определения взаимных помех, ту же самую полосу частот, что и используемая полоса частот системы 10 радиосвязи, которая должна управляться. Это определение выполняется, например, обращаясь к регистрационной информации DB. Заметим, что блок 320 управления может определить, что системы радиосвязи используют одну и ту же полосу частот в случае, когда используемые полосы частот частично перекрываются, как в примерах, показанных на фиг. 24- 27, даже если используемые полосы частот не являются полностью одинаковыми. Дополнительно, блок 320 управления может определить, что системы радиосвязи используют одну и ту же полосу частот в случае, когда разность между используемыми полосами частот находится в пределах заданного диапазона, даже если используемые полосы частот не перекрываются.
В случае, когда определено, что системы радиосвязи используют одни и те же полосы частот (S1102/Да), на этапе S1104 блок 320 управления определяет, работает ли система 10 радиосвязи, которая должна быть подвергнута процессу определения взаимных помех, в то же самое время, что и используемая полоса частот системы 10 радиосвязи, которая должна управляться. Это определение выполняется, например, с обращением к регистрационной информации DB. Заметим, что блок 320 управления может определить, что системы радиосвязи работают одновременно в случае, когда рабочее время частично перекрывается, даже если рабочее время не является полностью одинаковым. Дополнительно, блок 320 управления может определить, что системы радиосвязи работают одновременно в случае, когда разность по времени попадает в заданный диапазон, даже если времена не перекрываются.
В случае, когда определено, что системы радиосвязи работают одновременно (S1104/Да), на этапе S1106 блок 320 управления определяет, работает ли система 10 радиосвязи, которая должна быть подвергнута процессу определения взаимных помех, в том же самом месте, что и используемая полоса частот системы 10 радиосвязи, которая должна управляться. Это определение выполняется, например, обращаясь к регистрационной информации DB. Заметим, что блок 320 управления может определить, что системы радиосвязи работают в одном и том же месте в случае, когда местоположения частично перекрываются, даже если рабочие местоположения не являются полностью одинаковыми. Дополнительно, блок 320 управления может определить, что системы радиосвязи работают в одном и том же месте в случае, когда разница в рабочих местоположениях находится в пределах заданного диапазона, даже если рабочие местоположения не перекрываются.
В случае, когда определено, что системы радиосвязи работают в одном и том же месте (S1106/Да), на этапе S1108 блок 320 управления определяет, что существует вероятность, что система 10 радиосвязи, которая должна управляться, может создавать взаимные помехи с системой 10 радиосвязи, которая должен быть подвергнута процессу определения взаимных помех.
С другой стороны, в случае, когда определено, что системы радиосвязи работают в разных местах (S1106/Нет), на этапе S1110 блок 320 управления определяет, что отсутствует вероятность, что система 10 радиосвязи, которая должна управляться, создает взаимные помехи с системой 10 радиосвязи, которая должна быть подвергнута процессу определения взаимных помех. Дополнительно, в случае, когда определено, что системы радиосвязи используют разные полосы частот (S1102/Нет), или в случае, когда определено, что системы радиосвязи работают в различное время (S1104/Да), блок 320 управления подобным образом определяет, что нет никакой вероятности взаимных помех.
Выше был описан пример процесса определения взаимных помех.
Хотя в этом примере был описан случай, когда определение выполняется, основываясь на регистрационной информации DB, определение может также быть выполнено подобным образом, основываясь на информации обнаружения. В случае, когда определение основано на информации обнаружения, в процессе на этапе S1102 блок 320 управления определяет, являются ли используемые полосы частот одинаковыми, основываясь на информации обнаружения. Поскольку этот процесс будет описан позже в разделе "3-5. Процесс определения перекрытия используемых полос частот", подробное описание здесь не приводится. Заметим, что в случае, когда приемная станция 100 или передающая станция 200, которые должны управляться, функционируют как устройство 500 датчика, определение в отношении местоположения и времени может отсутствовать.
3-5. Процесс определения перекрытия используемых полос частот
В дальнейшем, процесс определения перекрытия используемых полос частот, основываясь на информации обнаружения, устройством 300 управления связью в соответствии с настоящим вариантом осуществления, будет описан со ссылкой на фиг. 45-47. Этот процесс может принимать различные формы. Пример процесса будет описан ниже.
Пример 1 процесса
На фиг. 45 представлена блок-схема последовательности выполнения операций примера процесса определения перекрытия используемых полос частот, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 45, сначала на этапе S1202 блок 320 управления определяет, обнаружены ли другие системы 10 радиосвязи, которые используют ту же самую полосу частот, что и используемая полоса частот системы 10 радиосвязи, которая должна управляться.
В случае, когда определено, что другие системы 10 радиосвязи, которые используют ту же самую полосу частот, обнаружены (S1202/Да), на этапе S1204 блок 320 управления определяет, что существует система 10 радиосвязи, которая использует ту же самую полосу частот.
С другой стороны, в случае, когда определено, что другие системы 10 радиосвязи, которые используют ту же самую полосу частот, не обнаруживаются (S1202/нет), на этапе S1206 блок 320 управления определяет, обнаруживаются ли другие системы 10 радиосвязи, которые используют полосы в пределах заданного диапазона из той же самой полосы частот, что и используемая полоса частот системы 10 радиосвязи, которая должна управляться.
В случае, когда определено, что обнаруживаются другие системы 10 радиосвязи, которые используют полосы в пределах заданного диапазона из той же самой полосы частот, (S1206/Да), на этапе S1204 блок 320 управления определяет, что существует система 10 радиосвязи, использующая ту же самую полосу частот.
С другой стороны, в случае, когда определено, что другие системы 10 радиосвязи, которые используют полосы в пределах заданного диапазона из той же самой полосы частот, не обнаруживаются (S1206/Нет), на этапе S1208 блок 320 управления определяет, что нет никакой системы 10 радиосвязи, использующей ту же самую полосу частот.
Выше описан пример последовательности выполнения процесса обнаружения перекрытия используемых полос частот, основываясь на информации обнаружении.
Пример 2 процесса
На фиг. 46 представлена блок-схема последовательности выполнения операций процесса определения перекрытия используемых полос частот, выполняемого устройством 300 управления связью, соответствующим настоящему варианту осуществления.
Поскольку процесс перехода от этапа S1302 к этапу S1306 был описан со ссылкой на фиг. 45, его описание для фиг. 46 повторно не приводится.
На этапе S1306, в случае, когда определено, что другие системы 10 радиосвязи, которые используют полосы внутри заданного диапазона той же самой полосы частот, обнаружены (S1306/Да), на этапе S1308 блок 320 управления определяет, изменяют ли другие системы 10 радиосвязи используемые полосы частот во времени. Поскольку упомянутый здесь процесс будет описан позже в разделе "3-6. Процесс определения временного изменения используемой полосы частот", его подробное описание здесь не приводится.
В случае, когда определено, что другие системы 10 радиосвязи, которые используют полосы внутри заданного диапазона той же самой полосы частот, изменяют во времени используемые полосы частот (S1308/Да), на этапе S1304 блок 320 управления определяет, что существует система 10 радиосвязи, использующая ту же самую полосу частот.
С другой стороны, в случае, когда определено, что другие системы 10 радиосвязи, которые используют полосы внутри заданного диапазона той же самой полосы частот, не изменяют во времени используемые полосы частот (S1308/Нет), на этапе S1310 блок 320 управления определяет, что нет никакой системы 10 радиосвязи, использующей ту же самую полосу частот.
Выше был описан пример последовательности выполнения операций процесса определения перекрытия используемых полос частот, основываясь на информации обнаружения.
Пример 3 процесса
На фиг. 47 представлена блок-схема последовательности выполнения операций примера процесса определения перекрытия используемых полос частот, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 47, поскольку процесс переходит от этапа S1402 к этапу S1408 таким же образом, как было описано со ссылкой на фиг. 46, его описание повторно не приводится.
В случае, когда на этапе S1408 определено, что другие системы 10 радиосвязи, которые используют полосы внутри заданного диапазона той же самой полосы частот, изменяют во времени используемые полосы частот (S1408/Да), на этапе S1410 блок 320 управления определяет, изменяют ли другие системы 10 радиосвязи во времени используемые полосы частот в направлении, приближающемся к используемой полосе частот системы радиосвязи, которая должна управляться.
В случае, когда определено, что другие системы 10 радиосвязи, которые используют полосы в пределах заданного диапазона из той же самой полосы частот, изменяют используемую полосу частот во времени в направлении, приближающемся к используемой полосе частот системы радиосвязи, которая должна управляться (S1410/Да), на этапе S1404 блок 320 управления определяет, что существует система 10 радиосвязи, использующая ту же самую полосу частот.
С другой стороны, в случае, когда определено, что другие системы 10 радиосвязи, которые используют полосы в пределах заданного диапазона той же самой полосы частот, изменяют во времени используемую полосу частот в направлении, удаляющемся от используемой полосы частот системы радиосвязи, которая должна управляться (S1410/Нет), на этапе S1412 блок 320 управления определяет, что нет системы 10 радиосвязи, использующей ту же самую полосу частот.
Выше был описан пример последовательности выполнения операций процесса определения перекрытия используемых полос частот, основываясь на информации обнаружения.
3-6. Процесс определения временного изменения используемой полосы частот
В дальнейшем, процесс определения временного изменения используемой полосы частот, основываясь на информации обнаружения устройством 300 управления связью в соответствии с настоящим вариантом осуществления, будет описан со ссылкой на фиг. 48 и фиг. 49. Этот процесс может принимать различные формы. Пример процесса будет описан ниже.
Пример 1 процесса
На фиг. 48 представлена блок-схема последовательности выполнения операций процесса определения временного изменения используемой полосы частот, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления. Заметим, что процесс определения в случае, когда ширина полосы обнаруживается дискретно, описанный выше со ссылкой на фиг. 23, будет описан, используя эту блок-схему. Символы № -N - № N указывают индексы полосы пропускания.
Как показано на фиг. 48, сначала на этапе S1502 блок 320 управления определяет, обнаруживаются ли другие системы 10 радиосвязи в полосе пропускания № i в момент t.
В случае, когда другие системы 10 радиосвязи обнаруживаются в полосе пропускания № i в момент времени t (S1502/Да), на этапе S1504 блок 320 управления определяет, обнаруживается ли система радиосвязи в полосе пропускания № i+n в момент времени t+t'. Заметим, что в случае, когда другие системы 10 радиосвязи не обнаруживаются в полосе пропускания № i в момент времени t (S1502/Нет), процесс переходит к последующему этапу S1512.
В случае, когда система радиосвязи обнаруживается в полосе пропускания № i+n в момент времени t+t' (S1504/Да), на этапе S1506 блок 320 управления определяет, что обнаруженная система радиосвязи изменяет во времени используемую полосу частот с нижней частоты к верхней.
С другой стороны, в случае, когда система радиосвязи не обнаруживается в полосе пропускания № i+n в момент времени t+t' (S1504/Нет), на этапе S1508 блок 320 управления определяет, обнаруживается ли система радиосвязи в полосе пропускания № i-m в момент времени t+t'.
В случае, когда система радиосвязи обнаруживается в полосе пропускания № i-m в момент времени t+t' (S1508/Да), на этапе S1510 блок 320 управления определяет, что обнаруженная система радиосвязи изменяет во времени используемую полосу частот от верхней частоты к нижней.
В случае, когда система радиосвязи не обнаруживается в полосе пропускания № i-m в момент времени t+t' (S1508/Ytn), на этапе S1512 блок 320 управления определяет, что обнаруженная система радиосвязи не изменяет используемую полосу частот во времени.
Выше был описан пример последовательности выполнения процесса определения временного изменения используемой полосы частот, основываясь на информации обнаружения.
Пример 2 процесса
На фиг. 49 представлена блок-схема последовательности выполнения операций примера процесса определения временного изменения используемой полосы частот, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления. Заметим, что процесс определения в случае, когда полоса пропускания обнаруживается дискретно, описанный выше со ссылкой на фиг. 23, будет описан, используя эту блок-схему последовательности выполнения операций. Символы № -N - № N указывают индексы полос пропускания.
Как показано на фиг. 49, поскольку процессы на этапах S1502, S1504, S1506, S1508, S1510 и S1512 являются такими, как было описано выше со ссылкой на фиг. 48, их описание повторяться не будет. В этом примере процесса к примеру процесса, показанного на фиг. 48, добавляются этапы S1505 и S1509.
В случае, когда система радиосвязи обнаруживается в полосе пропускания № i+n в момент времени t+t' (S1504/Да), на этапе S1505 блок 320 управления определяет, обнаружена ли система радиосвязи в полосе пропускания № i+2n в момент времени t+2t'. В случае, когда система радиосвязи обнаружена в полосе пропускания № i+2n в момент времени t+2t' (S1505/Да), процесс переходит к этапу S1506. Дополнительно, в случае, когда система радиосвязи не обнаруживается в полосе пропускания № i+2n в момент времени t+2t' (S1505/Нет), процесс переходит к этапу S1512.
В случае, когда система радиосвязи обнаруживается в полосе пропускания № i-m в момент времени t+t' (S1508/Да), на этапе S1509 блок 320 управления определяет, обнаруживается ли система радиосвязи в полосе пропускания № i-2m в момент времени t+2t'. В случае, когда система радиосвязи обнаруживается в полосе пропускания № i-2m в момент времени t+2t' (S1509/Да), процесс переходит к этапу S1510. Дополнительно, в случае, когда система радиосвязи не обнаруживается в полосе пропускания № i-2m в момент времени t+2t' (S1509/Нет), процесс переходит к этапу S1512.
Выше был описан пример последовательности выполнения операций процесса определения временного изменения используемой полосы частот, основываясь на информации обнаружения.
Как описано в этом примере процесса, блок 320 управления может многократно подтверждать состояние изменения полосы частот. Дополнительно, блок 320 управления может повторять такой процесс определения временной обработки. Таким образом, блок 320 управления может с высокой точностью определить, действительно ли система 10 радиосвязи изменяет во времени используемую полосу частот. Заметим, что, хотя на фиг. 49 состояние изменения полосы частот подтверждается с равными интервалами, то есть, в моменты времени t, t+t', t+2t', состояние изменения может подтверждаться с разными интервалами. Аналогичным образом, хотя на фиг. 49 состояние изменения полосы частот подтверждается с равными интервалами, то есть, полосы № 1, № i+n, № i+2n, состояние изменения может подтверждаться в разными интервалами.
3-7. Процесс принятия решения о скачкообразной перестройке частоты
В дальнейшем, процесс принятия решения об информации установки скачкообразной перестройки частоты устройством 300 управления связью в соответствии с настоящим вариантом осуществления будет описан со ссылкой на фиг. 50-52. Этот процесс может принимать различные формы. Пример процесса будет описан ниже.
Пример 1 процесса
На фиг. 50 представлена блок-схема последовательности выполнения операций процесса принятия решения об информации установки скачкообразной перестройки частоты, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 50, сначала на этапе S1602 блок 320 управления определяет схему использования радиоресурса на участке, где используемая полоса частот системы 10 радиосвязи, которая должна управляться, перекрывается с используемыми полосами частот других систем 10 радиосвязи. Например, блок 320 управления принимает решение, что система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты на участке, где используемые полосы частот перекрываются, и определяет шаблон скачкообразной перестройки. Заметим, что, в случае, когда не существует участка перекрытия, блок 320 управления пропускает этот процесс.
В дальнейшем, на этапе S1604 блок 320 управления определяет схему использования радиоресурса на участке, где используемая полоса частот системы 10 радиосвязи, которая должна управляться, не перекрывается с испрользуемыми полосами частот других систем 10 радиосвязи. Например, блок 320 управления принимает решение о диапазоне полосы частот, используемой системой 10 радиосвязи, которая должна управляться, без выполнения скачкообразной перестройки частоты, внутри участка, где используемые полосы частот не перекрываются. Блок 320 управления может принять решение, что скачкообразная перестройка частоты выполняется также на участке, где используемые полосы частот не перекрываются. Заметим, что в случае, когда нет участка, где бы используемые полосы частот не перекрывались, блок 320 управления не выполняет этот процесс.
Затем, на этапе S1606 блок 320 управления формирует информацию установки скачкообразной перестройки частоты. Информация установки скачкообразной перестройки частоты содержит информацию, указывающую полосу частот, в которой выполняется скачкообразная перестройка частоты, шаблон скачкообразной перестройки частоты и полосу частот, используемую без выполнения скачкообразной перестройки частоты, определенные на предшествующих этапах S1602-S1606. Заметим, что блок 320 управления может определить временной слот, местоположение и т. п., в которых система 10 радиосвязи, которая должна управляться, выполняет скачкообразную перестройку частоты в соответствии с информацией системы 10 радиосвязи, которая, вероятно, будет создавать взаимные помехи, и информация установки скачкообразной перестройки частоты может содержать информацию, указывающую эти время, местоположение и т. п.
Выше был описан пример последовательности выполнения операций процесса принятия решения об информации установки скачкообразной перестройки частоты.
Пример 2 процесса
На фиг. 51 представлена блок-схема примера последовательности выполнения операций процесса принятия решения об информации установки скачкообразной перестройки частоты, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 51, сначала на этапе S1702 блок 320 управления определяет, обновляется ли информация, относящаяся к другим системам радиосвязи. Например, блок 320 управления запрашивает DB 400 через блок 310 связи, обновляется ли информация.
В случае, когда определено, что информация не обновляется (S1702/Нет), процесс возвращается к этапу S1702.
С другой стороны, в случае, когда определено, что информация обновляется (S1702/Да), процесс переходит к этапу S1704. Поскольку процесс на этапах S1704-S1708 является таким же, как процесс на этапах S1602-S1606, описанных выше со ссылкой на фиг. 50, их описание повторно не приводится.
Таким способом процесс принятия решения об информации установки скачкообразной перестройки частоты может выполняться регулярно. Помимо вышесказанного, процесс принятия решения об информации установки скачкообразной перестройки частоты может быть инициирован случайным событием, отличным от обновления информации. Например, процесс определения информации установки скачкообразной перестройки частоты может выполняться, инициируясь определением, что существуют другие системы 10 радиосвязи, полученным из сетевой информации.
Выше был описан пример последовательности выполнения операций процесса принятия решения об информации установки скачкообразной перестройки частоты.
В процессе принятия решения об информации установки скачкообразной перестройки частоты на описанных выше этапах S1602 (фиг. 50) и S1704 (фиг. 51), после определения шаблона скачкообразной перестройки частоты, может быть учтена информация о шаблонах скачкообразной перестройки частоты, используемых другими системами 10 радиосвязи. Процесс принятия решения о шаблоне скачкообразной перестройки частоты в этом случае будет описана ниже со ссылкой на фиг. 52.
На фиг. 52 представлена блок-схема примера последовательности выполнения операций процесса принятия решения о шаблоне скачкообразной перестройки частоты, выполняемого устройством 300 управления связью в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 52, сначала на этапе S1802 блок 320 управления определяет, известны ли шаблоны скачкообразной перестройки частоты других систем 10 радиосвязи. Например, блок 320 управления определяет, известны ли шаблоны скачкообразной перестройки частоты других систем 10 радиосвязи, обращаясь к полученной сетевой информации.
В случае, когда шаблоны скачкообразной перестройки частоты известны (S1802/Да), на этапе S1804 блок 320 управления определяет, существует ли шаблон скачкообразной перестройки частоты, не используемый другими системами 10 радиосвязи.
В случае, когда существует шаблон скачкообразной перестройки частоты, который не используется (S1804/Да), на этапе S1806 блок 320 управления принимает решение о шаблоне, который будет использоваться, из числа шаблонов скачкообразной перестройки частоты, не используемых другими системами 10 радиосвязи.
С другой стороны, в случае, когда определено, что шаблоны скачкообразной перестройки частоты других систем 10 радиосвязи неизвестны (S1802/Нет), или в случае, когда, хотя шаблоны скачкообразной перестройки частоты известны, нет шаблона скачкообразной перестройки частоты, который не используется (S1804/No), на этапе S1808 блок 320 управления принимает решение о шаблоне, который должен использоваться, без учета шаблонов скачкообразной перестройки частоты, используемых другими системами 10 радиосвязи.
Выше был приведен пример последовательности выполнения операций процесса принятия решения о шаблоне скачкообразной перестройки частоты.
3-8. Процесс записи регистрационной информации DB
В дальнейшем, процесс записи регистрационной информации DB, которая должна регистрироваться в DB 400 в соответствии с настоящим вариантом осуществления, будет описан со ссылкой на фиг. 53 и 54. Сначала, со ссылкой на фиг. 53 будет описан процесс регистрации в DB 400 информации, указывающей шаблон скачкообразной перестройки частоты. Этот процесс может принимать различные формы. Пример форм процесса будет описан ниже.
На фиг. 53 представлен пример последовательности выполнения операций процесса записи регистрационной информации DB, выполняемого в системе 1 связи в соответствии с настоящим вариантом осуществления. Как показано на фиг. 53, эта последовательность содержит MME 300A, DB 400 и базовую станцию 300B. MME 300A и базовая станция 300B принадлежат к разным системам 10 радиосвязи и функционируют как устройство 300 управления связью, которое должно управлять системами 10 радиосвязи, к которым, соответственно, принадлежат MME 300A и базовая станция 300B.
На этапах S1902-S1908 ММЕ 300A выполняет процесс, аналогичный процессу на этапах S202-S208, описанных выше со ссылкой на фиг. 35.
После этапа S1908, на этапе S1910 MME 300A передает DB 400 информацию, указывающую шаблон скачкообразной перестройки частоты, определенный на этапе S1908.
Затем, на этапе S1912 DB 400 записывает принятую информацию, указывающую шаблон скачкообразной перестройки частоты. В этом случае, DB 400 хранит принятую информацию, указывающую шаблон скачкообразной перестройки частоты, в качестве регистрационной информации DB системы 10 радиосвязи, которой принадлежит MME 300A, являющемуся источником передачи.
В дальнейшем, на этапах S1914-S1920 базовая станция 300B выполняет процесс, аналогичный процессу этапов S202-S208, описанных выше со ссылкой на фиг. 35. Здесь, ренгистрационная информация DB, принятая базовой станцией 300B на этапе S1916, содержит информацию, указывающую шаблон скачкообразной перестройки частоты, используемый системой 10 радиосвязи, которой принадлежит MME 300A. Поэтому, в процессе принятия решения об установке перестройки частоты на этапе S1920 базовая станция 300B определяет шаблон скачкообразной перестройки частоты, которая должен использоваться, из числа шаблонов, отличных от шаблонов скачкообразной перестройки частоты, используемых системой 10 радиосвязи, которой принадлежит MME 300A.
Затем, на этапе S1922 базовая станция 300B передает DB 400 информацию, указывающую шаблон скачкообразной перестройки частоты, определенный на этапе S1920.
Затем, на этапе S1924 DB 400 записывает принятую информацию, указывающую шаблон скачкообразной перестройки частоты.
Выше был описан пример последовательности выполнения операций процесса записи регистрационной информации DB.
Информация, указывающая шаблон скачкообразной перестройки частоты, переданная на описанных выше этапах S1910 и S1922 (фиг. 53), может изменяться в соответствии с тем, выполняет ли каждая из систем 10 радиосвязи скачкообразную перестройку частоты. Пример процесса передачи информации, указывающей шаблон скачкообразной перестройки частоты, будет описан ниже со ссылкой на фиг. 54.
На фиг. 54 представлена блок-схема последовательности выполнения операций, показывающая пример процесса передачи информации, указывающей шаблон скачкообразной перестройки частоты, выполняемой устройством 300 управления связью, соответствующим настоящему варианту осуществления.
Как показано на фиг. 54, сначала на этапе S2002 блок 320 управления выполняет процесс принятия решения о рабочем режиме.
Затем, на этапе S2004 блок 320 управления определяет, проводится ли работа в режиме скачкообразной перестройки частоты.
В случае, когда определено, что работа проводится в режиме скачкообразной перестройки частоты (S2004/Да), на этапе S2006 блок 320 управления выполняет процесс принятия решения об установке скачкообразной перестройки частоты.
Затем, на этапе S2008 блок 310 связи сообщает DB 400 информацию, указывающую шаблон скачкообразной перестройки частоты, определенный для использования блоком 320 управления на этапе S2006.
С другой стороны, в случае, когда определено, что работа ведется не в режиме скачкообразной перестройки частоты (S2004/Нет), на этапе S2010 блок 310 связи сообщает DB 400, что работа ведется в обычном режиме. Заметим, что в случае, когда DB 400 не сообщают информацию, указывающую шаблон скачкообразной перестройки частоты, и в случае, когда считается, что скачкообразная перестройка частоты не выполняется в системе 10 радиосвязи, этот этап может быть пропущен.
Выше был описан пример процесса передачи информации, указывающей шаблон скачкообразной перестройки частоты.
3-9. Процесс переключения настройки передачи
В дальнейшем, процесс переключения настройки передачи передающей станцией 200 в соответствии с настоящим вариантом осуществления будет описан со ссылкой на фиг. 55.
На фиг. 55 представлена блок-схема примера последовательности выполнения операций процесса переключения настройки передачи, выполняемого на передающей станции 200 в соответствии с настоящим вариантом осуществления.
Как показано на фиг. 55, сначала на этапе S2102 блок 220 управления передающей станции 200 определяет, применять ли скачкообразную перестройку частоты. Например, блок 220 управления выполняет это определение, обращаясь к информации установки скачкообразной перестройки частоты, сообщенной от устройства 300 управления связью.
В случае, когда решено применять скачкообразную перестройку частоты (S2102/Да), блок 220 управления устанавливает включение (ON) коэффициента фильтрации для скачкообразной перестройки частоты (этап S2104), устанавливает включение (ON) повышающей дискретизации (этап S2106) и устанавливает выключение (OFF) добавления CP (этап S2108).
С другой стороны, в случае, когда решено не применять скачкообразную перестройку частоты (S2102/Нет), блок 220 управления устанавливает выключение (OFF ) коэффициента фильтрации для скачкообразной перестройки частоты (этап S2110), устанавливает выключение (OFF) повышающей дискретизации (этап S2112) и устанавливает включение (ON) добавления CP (этап S2114). Заметим, что выключение коэффициента фильтрации для скачкообразной перестройки частоты может соответствовать коэффициенту фильтрации для обычной OFDM, например, выраженному в описанном выше уравнении 2.
Заметим, что хотя при этой последовательности выполнения операций блок 220 управления устанавливает включение/выключение (ON/OFF) скачкообразной перестройки частоты в качестве критериев определения для включения/выключения фильтрации и добавления CP, настоящая технология не ограничивается этим примером. Например, блок 220 управления может определить включение/выключение фильтрации и добавления CP, например, в соответствии с тем, существуют ли другие системы 10 радиосвязи, описанные выше, в качестве критерия определения включения/выключения скачкообразной перестройки частоты.
4. Примеры применений
Технология настоящего раскрытия применима к различным изделиям. Например, устройство 300 управления связью может быть реализовано как любой тип сервера, такой как башня-сервер, стойка-сервер и блейд-сервер. Устройство 300 управления связью может быть управляющим модулем (таким как интегральный модуль, содержащий одиночный кристалл, и карта или блейд, который вставляется в слот блейд-сервера), смонтированный на сервере.
Например, приемная станция 100 или передающая станция 200 могут быть реализованы как любой тип расширенного узла B (eNB), такой как макро-eNB и малый eNB. Малый eNB может быть eNB, который охватывает ячейку, которая меньше макроячейки, такой как пико-eNB, микро-eNB или домашняя (фемто-)eNB. Вместо этого приемная станция 100 или передающая станция 200 могут быть реализованы как любые другие типы базовых станций, такие как NodeB и базовая приемопередающая станция (BTS). Приемная станция 100 или передающая станция 200 могут содержать основную часть (которая также упоминается как устройство базовой станции), выполненную с возможностью управления радиосвязью, и одну или более удаленных радиоголовок (RRH), расположенных в различных местох, удаленных от основной части. Дополнительно, различные типы терминалов, которые будут обсуждаться позже, могут также работать как приемная станция 100 или передающая станция 200 посредством временного полупостоянного исполнения функций базовой станции.
Например, приемная станция 100 или передающая станция 200 могут быть реализованы как мобильный терминал, такой как смартфон, планшетный персональный компьютер (PC), ноутбук, переносной игровой терминал, мобильный роутер портативный/с аппаратным ключом и цифровой фотоаппарат или автомобильный терминал, такой как автомобильное навигационное устройство. Приемная станция 100 или передающая станция 200 могут также быть реализованы как терминал (который также упоминается как терминал связи машинного типа (MTC)), выполняющий связь "машина-машина" (M2M). Кроме того, приемная станция 100 или передающая станция 200 могут быть модулем беспроводной связи (таким как интегральный модуль, содержащий одиночный кристалл), смонтированным на каждом из терминалов.
4.1. Пример применения, относящийся к серверу
На фиг. 56 представлена блок-схема примера схематичной конфигурации сервера 700, которому может применяться технология настоящего раскрытия. Сервер 700 содержит процессор 701, память 702, запоминающее устройство 703, сетевой интерфейс 704 и шину 706.
Процессор 701 может быть, например, центральным процессором (CPU) или цифровым сигнальным процессором (DSP), и управлять функциями сервера 700. Память 702 содержит оперативную память (RAM) и постоянную память (ROM) и хранит программу, исполняемую процессором 701, и данные. Запоминающее устройство 703 может содержать носитель, такой как полупроводниковая память и жесткий диск.
Сетевой интерфейс 704 является проводным интерфейсом связи для связи сервера 700 с проводной сестью 705 связи. Проводная сеть 705 связи может быть базовой сетью, такой как Evolved Packet Core (EPC) или сеть пакетной передачи данных (PDN), такой как Интернет.
Шина 706 соединяет друг с другом процессор 701, память 702, запоминающее устройство 703 и сетевой интерфейс 704. Шина 706 может содержать две или более шин (таких как высокоскоростная шина и низкоскоростная шина), каждая из которых имеет различную скорость.
На сервере 700, показанном на фиг. 56, блок 310 связи и блок 320 управления, описанные используя фиг. 18, могут быть реализованы в процессоре 701. Например, сервер 700 может снижать взаимные помехи с другими системами 10 радиосвязи посредством системы 10 радиосвязи, которая должна управляться, выполняя управление так им образом, что в системе 10 радиосвязи, которая должна управляться, выполняется скачкообразная перестройка частоты.
4.2. Примеры применения в отношении базовых станций
Первый пример применения
На фиг. 57 представлена блок-схема первого примера схемной конфигурации eNB, которой применима технология настоящего раскрытия. eNB 800 содержит одну или более антенн 810 и устройство 820 базовой станции . Каждая антенна 810 и устройство 820 базовой станции могут соединяться друг с другом радиочастотным кабелем.
Каждая из антенн 810 содержит одиночный или многочисленные антенные элементы (такие как многочисленные антенные элементы, содержащиеся в антенне MIMO), и используется для устройства 820 базовой станции, чтобы передавать и принимать радиосигналы. eNB 800 может содержать многочисленные антенны 810, как показано на фиг. 57. Например, многочисленные антенны 810 могут быть совместимыми с многочисленными полосами, часто используемыми eNB 800. Хотя на фиг. 57 показан пример, в котором eNB 800 содержит многочисленные антенны 810, eNB 800 может также содержать одиночную антенну 810.
Устройство 820 базовой станции содержит контроллер 821, память 822, сетевой интерфейс 823 и радиоинтерфейс 825.
Контроллер 821 может быть, например, CPU или DSP, и управляет различными функциями более высокого уровня устройства 820 базовой станции. Например, контроллер 821 генерирует пакет данных из данных сигналов, обработанных радиоинтерфейсом 825, и передает сгенерированный пакет через сетевой интерфейс 823. Контроллер 821 может связывать данные от многочисленных процессоров основной полосы, чтобы сгенерировать связанный пакет и передать сгенерированный связанный пакет. Контроллер 821 может иметь логические функции выполнения управления, такие как управление радиоресурсом, управление несущей радиосигнала, управление мобильностью, управление разрешением и планирование. Управление может выполняться совместно с eNB или базовым сетевым узлом, находящимся поблизости. Память 822 содержит RAM и ROM и хранит программу, выполняемую контроллером 821, и различные типы данных управления (такие как список терминалов, данные мощности передачи и данные планирования).
Сетевой интерфейс 823 является интерфейсом связи для соединения устройства 820 базовой станции с базовой сетью 824. Контроллер 821 может осуществлять связь с базовым сетевым узлом или другой eNB через сетевой интерфейс 823. В этом случае eNB 800 и базовый сетевой узел или другая eNB могут соединяться друг с другом через логический интерфейс (такой как интерфейс S1 и интерфейс X2). Сетевой интерфейс 823 может также быть проводным интерфейсом связи или радиоинтерфейсом для транспортного радиоканала. Если сетевой интерфейс 823 является радиоинтерфейсом, сетевой интерфейс 823 может использовать более высокую полосу частот для радиосвязи, чем полоса частот, используемая радиоинтерфейсом 825.
Радиоинтерфейс 825 поддерживает любую схему сотовой связи, такую как схема долгосрочной эволюции Long Term Evolution (LTE) и LTE-Advanced, и обеспечивает радиосоединение с терминалом, расположенным в ячейке eNB 800 через антенну 810. Радиоинтерфейс 825 может обычно содержать, например, процессор основной полосы (BB) 826 и радиочастотную схему 827. Процессор BB 826 может выполнять, например, кодирование/декодирование, модуляцию/демодуляцию, и мультиплексирование/ демультиплексирование, и выполняет различные типы обработки сигналов на уровнях (таких как L1, управление доступом к среде (MAC), управление линией радиосвязи (RLC), и пакетный протокол конвергенции данных (PDCP)). Процессор BB 826 может иметь часть или все описанные выше логические функции вместо контроллера 821. Процессор BB 826 может быть памятью, которая хранит программу управления связью, или модулем, содержащим процессор и сопутствующую схему, выполненную с возможностью исполнения программы. Обновление программы может позволить изменять функции процессора 826 BB. Модуль может быть картой или блейдом, которые вставляются в слот устройства 820 базовой станции 820. Альтернативно, модуль может также быть микросхемой, которая монтируется на карте или блейде. Между тем, радиочастотная схема 827 может содержать, например, смеситель, фильтр и усилитель, и передавать и принимать радиосигналы через антенну 810.
Радиоинтерфейс 825 может содержать многочисленные процессоры BB 826, как показано на фиг. 57. Например, многочисленные процессоры BB 826 могут быть совместимы с многочисленными полосами частот, используемыми eNB 800. Радиоинтерфейс 825 может содержать многочисленные схемы RF 827, как показано на фиг. 57. Например, многочисленные радиочастотные схемы 827 могут быть совместимы с многочисленными антенными элементами. Хотя на фиг. 57 показан пример, в котором радиоинтерфейс 825 содержит многочисленные процессоры BB 826 и многочисленные радиочастотные схемы 827, радиоинтерфейс 825 может также содержать одиночный процессор BB 826 или одиночную радиочастотную схему 827.
Второй пример применения
На фиг. 58 представлена блок-схема, показывающая второй пример схемной конфигурации eNB, к которой применима технология настоящего раскрытия. eNB 830 содержит одну или более антенн 840, устройство 850 базовой станции и RRH 860. Каждая антенна 840 и RRH 860 могут соединяться друг с другом радиочастотным кабелем. Устройство 850 базовой станции и RRH 860 могут соединяться друг с другом через высокоскоростную линию, такую как оптоволоконный кабель.
Каждая из антенн 840 содержит одиночный или многочисленные антенные элементы (такие как многочисленные антенные элементы, содержащиеся в антенне MIMO), и используется для RRH 860, чтобы передавать и принимать радиосигналы. eNB 830 может содержать многочисленные антенны 840, как показано на фиг. 58. Например, многочисленные антенны 840 могут быть совместимы с многочисленными полосами частот, используемыми eNB 830. Хотя на фиг. 58 поясняет пример, в который eNB 830 содержит многочисленные антенны 840, eNB 830 может также содержать одиночную антенну 840.
Устройство 850 базовой станции содержит контроллер 851, память 852, сетевой интерфейс 853, радиоинтерфейс 855 и соединительный интерфейс 857. Контроллер 851, память 852 и сетевой интерфейс 853 являются такими же, как контроллер 821, память 822 и сетевой интерфейс 823, описанные со ссылкой на фиг. 57.
Радиоинтерфейс 855 поддерживает любую схему сотовой связи, такую как LTE и LTE-Advanced, и обеспечивает радиосвязь для терминала, расположенного в сектор, соответствующем RRH 860 через RRH 860 и антенну 840. Радиоинтерфейс 855 может обычно содержать, например, процессор BB 856. Процессор ВВ 856 является тем же самым, что и процессор ВВ 826, описанный со ссылкой на фиг. 57, за исключением того, что процессор ВВ 856, соединяется с радиочастотной схемой 864 RRH 860 через соединительный интерфейс 857. Радиоинтерфейс 855 может содержать многочисленные процессоры BB 856, как показано на фиг. 58. Например, многочисленные процессоры BB 856 могут быть совместимы с многочисленными полосами частот, используемыми eNB 830. Хотя на фиг. 58 показан пример, в котором радиоинтерфейс 855 содержит многочисленные процессоры BB 856, радиоинтерфейс 855 может также содержать единственный процессор ВВ 856.
Соединительный интерфейс 857 является интерфейсом для соединения устройства 850 базовой станции (радиоинтерфейс 855) с RRH 860. Соединительный интерфейс 857 может также быть модулем связи для осуществления связи по описанной выше высокоскоростной линии, которая соединяет устройство 850 базовой станции (радиоинтерфейс 855) с RRH 860.
RRH 860 содержит соединительный интерфейс 861 и радиоинтерфейс 863.
Соединительный интерфейс 861 является интерфейсом для соединения RRH 860 (радиоинтерфейс 863) с устройством 850 базовой станции. Соединительный интерфейс 861 может также быть модулем связи для осуществления связи по описанной выше высокоскоростной линии.
Радиоинтерфейс 863 передает и принимает радиосигналы через антенну 840. Радиоинтерфейс 863 может обычно содержать, например, радиочастотную схему 864. Радиочастотная схема 864 может содержать, например, смеситель, фильтр и усилитель, и передавать и принимать радиосигналы через антенну 840. Радиоинтерфейс 863 может содержать многочисленные радиочастотные схемы 864, как показано на фиг. 58. Например, многочисленные радиочастотные схемы 864 могут поддерживать многочисленные антенные элементы. Хотя на фиг. 58 показан пример, в котором радиоинтерфейс 863 содержит многочисленные радиочастотные схемы 864, радиоинтерфейс 863 может также содержать одиночную радиочастотную схему 864.
В eNB 800 и eNB 830, показанных на фиг. 57 и 58, блок 210 связи и блок 220 управления, описанные с использованием фиг. 3, могут быть реализованы в радиоинтерфейсе 825 и радиоинтерфейсе 855 и/или радиоинтерфейсе 863. Дополнительно, по меньшей мере часть этих функций может быть реализована в контроллере 821 и в контроллере 851. Например, eNB 800 и eNB 830 могут уменьшить взаимные помехи с другими системами 10 радиосвязи, передавая данные терминалу пользователя (приемной станции 100), выполняя скачкообразную перестройку частоты на основе команды от устройства 300.
Дополнительно, в eNB 800 и eNB 830, показанных на фиг. 57 и 58, блок 110 связи и блок 120 управления, описанные, используя фиг. 2, могут быть реализованы в радиоинтерфейсе 825 и в радиоинтерфейсе 855 и/или в радиоинтерфейсе 863. Дополнительно, по меньшей мере часть этих функций может быть реализована в контроллере 821 и контроллере 851. Например, eNB 800 и eNB 830 могут принимать данные, переданные терминалом пользователя (передающей станцией 200) в то время, когда выполняется скачкообразная перестройка частоты, чтобы снизить взаимные помехи с другими системами 10 радиосвязи, принимая данные на основе команды от устройства 300.
4.3. Примеры применения в отношении устройств терминалов
Первый пример применения
На фиг. 59 представлена блок-схема примера схемной конфигурации смартфона 900, которому может применяться технология настоящего раскрытия. Смартфон 900 содержит процессор 901, память 902, запоминающее устройство 903, внешний соединительный интерфейс 904, камеру 906, датчик 907, микрофон 908, устройство 909 ввода данных, дисплей 910, громкоговоритель 911, радиоинтерфейс 912, один или более антенных переключателей 915, одну или более антенн 916, шину 917, батарею 918 и вспомогательный контроллер 919.
Процессор 901 может быть, например, CPU или системой на микросхеме (SoC), и управляет функциями прикладного уровня и другого уровня смартфона 900. Память 902 содержит RAM и ROM и хранит программу, которая исполняется процессором 901, и данные. Запоминающее устройство 903 может содержать носитель запоминающего устройства, такой как полупроводниковая память и жесткий диск. Внешний соединительный интерфейс 904 является интерфейсом для соединения внешнего устройства, такого как карта памяти и универсальная последовательная шина (USB), со смартфоном 900.
Камера 906 содержит формирователь изображения, такой как устройство с зарядовой связью (CCD) и комплементарная МОП-структура (CMOS), и формирует полученное изображение. Датчик 907 может содержать группу датчиков, таких как измерительный датчик, гироскопический датчик, геомагнитный датчик и датчик ускорения. Микрофон 908 преобразует звуки, попадающие в смартфон 900, в аудиосигналы. Устройство 909 ввода данных содержит, например, сенсорный датчик, выполненный с возможностью обнаружения касания экрана дисплея 910, клавиатуры, клавиатурной панели, кнопки или переключателя, и принимает операцию или ввод информации от пользователя. Дисплей 910 содержит экран, такой как жидкокристаллический дисплей (LCD) и органический светодиодный дисплей (OLED), и выводит на экран выходное изображение смартфона 900. Громкоговоритель 911 преобразует выходные аудиосигналы смартфона 900 в звуки.
Радиоинтерфейс 912 поддерживает любую схему сотовой связи, такую как LTE и LTE-Advanced, и осуществляет радиосвязь. Радиоинтерфейс 912 может обычно содержать, например, процессор ВВ 913 и радиочастотную схему 914. Процессор ВВ 913 может выполнять, например, кодирование/декодирование, модуляцию/демодуляцию, и мультиплексирование/демультиплексирование, и выполнять различные типы обработки сигналов при радиосвязи. Между тем, радиотехническая схема 914 может содержать, например, смеситель, фильтр и усилитель, и передает и принимает радиосигналы через антенну 916. Радиоинтерфейс 913 может также быть одним микросхемным модулем, имеющим процессор ВВ 913 и радиотехническую схему 914, интегрированные в него. Радиоинтерфейс 912 может содержать многочисленные процессоры BB 913 и многочисленные радиотехнические схемы 914, как показано на фиг. 59. Хотя на фиг. 59 показан пример, в котором радиоинтерфейс 913 содержит многочисленные процессоры BB 913 и многочисленные радиочастотные схемы 914, радиоинтерфейс 912 может также содержать одиночный процессор ВВ 913 или одиночную радиочастотную схему 914.
Кроме того, в дополнение к схеме сотовой связи, радиоинтерфейс 912 может поддерживать другой тип схемы радиосвязи, такой как схема беспроводной связи на короткое расстояние, схема связи в ближнем поле и схема локальной радиосети (LAN). В этом случае радиоинтерфейс 912 может содержать процессор ВВ 913 и радиочастотную схему 914 для каждой схемы радиосвязи.
Каждый из антенных переключателей 915 переключает места назначения соединений антенн 916 из числа множества схем (таких как схемы для различных схем радиосвязи), содержащихся в радиоинтерфейсе 912.
Каждая из антенн 916 содержит одиночный или многочисленные антенные элементы (такие как многочисленные антенные элементы, содержащиеся в антенне MIMO) и используется для радиоинтерфейса 912, чтобы передавать и принимать радиосигналы. Смартфон 900 может содержать многочисленные антенны 916, как показано на фиг. 59. Хотя на фиг. 59 показан пример, в котором смартфон 900 содержит многочисленные антенны 916, смартфон 900 может также содержать одиночную антенну 916.
Дополнительно, смартфон 900 может содержать антенну 916 для каждой схемы радиосвязи. В этом случае, антенные переключатели 915 могут быть исключены из конфигурации смартфона 900.
Шина 917 соединяет друг с другом процессор 901, память 902, запоминающее устройство 903, внешний соединительный интерфейс 904, камеру 906, датчик 907, микрофон 908, устройство 909 ввода данных, дисплей 910, громкоговоритель 911, радиоинтерфейс 912 и вспомогательный контроллер 919. Батарея 918 обеспечивает электропитание блоков смартфона 900, показанного на фиг. 59, через фидерные линии, которые частично показаны на чертеже пунктиром. Вспомогательный контроллер 919 управляет минимальной необходимой функцией смартфона 900, например, в режиме сна.
В смартфоне 900, показанном на фиг. 59, блок 110 связи и блок 120 управления, описанные, используя фиг. 2, могут быть реализованы в радиоинтерфейсе 912. Дополнительно, по меньшей мере часть этих функций может быть реализована в процессоре 901 или во вспомогательном контроллере 919. Например, смартфон 900 может принимать данные, переданные базовой станцией (передающей станцией 200), в то время, когда выполняется скачкообразная перестройка частоты, чтобы уменьшить взаимные помехи с другими системами 10 радиосвязи, принимая данные, основываясь на команде от устройства 300.
Дополнительно, в смартфоне 900, показанном на фиг. 59, блок 210 связи и блок 220 управления, описанные, используя фиг. 3, могут быть реализованы в радиоинтерфейсе 912. Дополнительно, по меньшей мере часть этих функций может быть реализована в процессоре 901 или во вспомогательном контроллере 919. Например, смартфон 900 может уменьшать взаимные помехи с другими системами 10 радиосвязи, передавая данные базовой станции (приемной станции 100) при выполнении скачкообразной перестройки частоты, основываясь на команде от устройства 300.
Второй пример применения
На фиг. 60 представлена блок-схема, показывающая пример схематичной конфигурации автомобильного навигационного устройства 920, к которому может применяться технология настоящего раскрытия. Автомобильное навигационное устройство 920 содержит процессор 921, память 922, модуль 924 глобальной системы навигации и определения местоположения (GPS), датчик 925, интерфейс 926 данных, проигрыватель 927 контента, интерфейс 928 носителя запоминающего устройства, устройство 929 ввода данных, дисплей 930, громкоговоритель 931, радиоинтерфейс 933, один или более переключателей 936, одну или более антенн 937 и батарею 938.
Процессор 921 может быть, например, CPU или SoC и управляет функцией навигации и другой функцией автомобильного навигационного устройства 920. Память 922 содержит RAM и ROM и хранит программу, выполняемую процессором 921, и данные.
Модуль 924 GPS использует сигналы GPS, принятые от спутника GPS, чтобы измерять местоположение (такое как широта, долгота и высота) автомобильного навигационного устройства 920. Датчик 925 может содержать группу датчиков, таких как гироскопический датчик, геомагнитный датчик и барометрический датчик. Интерфейс 926 данных соединяется, например, с сетью 941 автомобиля через терминал, который не показан, и получает данные, сформированные автомобилем, такие как данные скорости автомобиля.
Проигрыватель 927 контента воспроизводит контент, хранящийся на носителе запоминающего устройства (таком как CD и DVD), который вставляется в интерфейс 928 носителя. Устройство 929 ввода данных содержит, например, сенсорный датчик, выполненный с возможностью обнаружения касания экрана дисплея 930, кнопку или переключатель и принимает операцию или ввод информации от пользователя. Дисплей 930 содержит экран, такой как дисплей LCD или OLED, и отображает на экране изображение функции навигации или воспроизводимый контент. Громкоговоритель 931 выводит звуки навигационной функции или воспроизводимый контент.
Радиоинтерфейс 933 поддерживает любую схему сотовой связи, такую как LTE и LTE-Advanced, и осуществляет радиосвязь. Радиоинтерфейс 933 может обычно содержать, например, процессор ВВ 934 и радиочастотную схему 935. Процессор ВВ 934 может выполнять, например, кодирование/декодирование, модуляцию/демодуляцию и мультиплексирование/демультиплексирование и выполняет различные виды обработки сигналов радиосвязи. Помимо этого, радиочастотная схема 935 может содержать, например, смеситель, фильтр и усилитель, и передает и принимает радиосигналы через антенну 937. Радиоинтерфейс 933 может быть модулем с одной микросхемой, имеющей интегрированные в ней процессор ВВ 934 и радиочастотную схему 935. Радиоинтерфейс 933 может содержать многочисленные процессоры BB 934 и многочисленные радиочастотные схемы 935, как показано на фиг. 60. Хотя на фиг. 60 показан пример, в котором радиоинтерфейс 933 содержит многочисленные процессоры BB 934 и многочисленные радиочастотные схемы 935, радиоинтерфейс 933 может также содержать одиночный процессор ВВ 934 или одиночную радиочастотную схему 935.
Кроме того, в дополнение к схеме сотовой связи, радиоинтерфейс 933 может поддерживать другой тип схемы радиосвязи, такой как схема беспроводной связи на короткое расстояние, схема связи в ближнем поле и схема LAN радиосвязи. В этом случае радиоинтерфейс 933 может содержать процессор ВВ 934 и радиочастотную схему 935 для каждой схемы радиосвязи.
Каждый из антенных переключателей 936 переключает места назначения соединений антенн 937 из числа множества схем (таких как схемы для различных схем радиосвязи), содержащихся в радиоинтерфейсе 933.
Каждая из антенн 916 содержит одиночный или многочисленные антенные элементы (такие как многочисленные антенные элементы, содержащиеся в антенне MIMO) и используется для радиоинтерфейса 933, чтобы передавать и принимать радиосигналы. Автомобильное навигационное устройство 920 может содержать многочисленные антенны 937, как показано на фиг. 60. Хотя на фиг. 60 показан пример, в котором автомобильное навигационное устройство 920 содержит многочисленные антенны 937, автомобильное навигационное устройство 920 может также содержать одиночную антенну 937.
Дополнительно, автомобильное навигационное устройство 920 может содержать антенну 937 для каждой схемы радиосвязи. В этом случае, антенные переключатели 936 могут быть исключены из конфигурации автомобильного навигационного устройства 920.
Батарея 938 обеспечивает электропитание блоков автомобильного навигационного устройства 920, показанного на фиг. 60, через фидерные линии, которые частично показаны на чертеже пунктиром. Батарея 938 накапливает энергию, подаваемую от автомобиля.
В автомобильном навигационном устройстве 920, показанном на фиг. 60, блок 110 связи и блок 120 управления, описанные, используя фиг. 2, могут быть реализованы в радиоинтерфейсе 933. Дополнительно, по меньшей мере часть этих функций может быть реализована в процессоре 921. Например, автомобильное навигационное устройство 920 может принимать данные, переданные базовой станцией (передающей станцией 200) в то время, когда выполняется скачкообразная перестройка частоты, чтобы уменьшить взаимные помехи с другими системами радиосвязи, принимая данные, основываясь на команде от устройства 300 управления связью.
Дополнительно, в автомобильном навигационном устройстве 920, показанном на фиг. 60, блок 210 связи и блок 220 управления, описанные, используя фиг. 3, могут быть реализованы в радиоинтерфейсе 933. Дополнительно, по меньшей мере часть этих функций может быть реализована в процессоре 921. Например, автомобильное навигационное устройство 920 может уменьшать взаимные помехи с другими системами 10 радиосвязи, передавая данные базовой станции (приемной станции 100) и выполняя в это время скачкообразную перестройку частоты, основываясь на команде устройства 300 управления связью.
Технология настоящего раскрытия может также быть реализована как автомобильная система (или система транспортного средства) 940, содержащая один или более блоков автомобильного навигационного устройства 920, автомобильную сеть 941 и автомобильный модуль 942. Автомобильный модуль 942 формирует автомобильные данные, такие как скорость автомобиля, скорость двигателя и информация о неисправностях, и выводит сформированные данные в автомобильную сеть 941.
5. Заключение
Один из вариантов осуществления настоящего раскрытия выше был описан подробно со ссылкой на фиг. 1-60. Как описано выше, устройство 300 управления связью, соответствующее настоящему варианту осуществления, осуществляет связь с устройством, принадлежащим к системе 10 радиосвязи, которая должна управляться, и управляет тем, выполняет ли передающая станция 200, принадлежащая к системе 10 радиосвязи, которая должна управляться, скачкообразную перестройку частоты, основываясь на сетевой информации других систем 10 радиосвязи. Например, устройство 300 управления связью может уменьшать взаимные помехи с другими системами 10 радиосвязи с помощью системы 10 радиосвязи, которая должна управляться, принимая решение о выполнении скачкообразной перестройки частоты. Дополнительно, устройство 300 управления связью может поддерживать скорость связи системы 10 радиосвязи, которая должна управляться, принимая решение, что скачкообразная перестройка частоты не выполняется.
Дополнительно, устройство 300 управления связью, соответствующее настоящему варианту осуществления, управляет тем, выполняет ли система 10 радиосвязи, которая должна управляться, скачкообразную перестройку частоты, основываясь на приоритете каждой системы 10 радиосвязи. Таким образом, в настоящем варианте осуществления, можно уменьшить взаимные помехи с системой радиосвязи, имеющей более высокий приоритет, и можно улучшить качество связи системы 10 радиосвязи, которая должна управляться.
Дополнительно, устройство 300 управления связью, соответствующее настоящему варианту осуществления, управляет системой 10 радиосвязи, которая должна управляться, с тем, чтобы скачкообразная перестройка частоты выполнялась в полосе частот, перекрывающейся с используемыми полосами частот других систем 10 радиосвязи. Таким образом, можно уменьшить взаимные помехи с другими системами 10 радиосвязи посредством системы 10 радиосвязи, которая должна управляться. Дополнительно, система 10 радиосвязи, которая должна управляться, может использовать больше радиоресурсов, в то же время принимая помехи от других систем 10 радиосвязи.
Предпочтительный вариант(ы) осуществления настоящего раскрытия был описан выше со ссылкой на сопроводительные чертежи, однако, настоящее раскрытие не ограничивается приведенными выше примерами. Специалист в данной области техники может предложить различные альтернативы и модификации в рамках объема добавленной формулы изобретения и следует понимать, что они, естественно, будут попадать в пределы технического объема настоящего раскрытия.
Последовательности процессов управления, выполняемых каждым устройством, представленным в настоящем описании, могут быть реализованы программным обеспечением, аппаратными средствами или сочетанием программного и аппаратного обеспечения. Программы, составляющие такое программное обеспечение, могут быть сохранены заранее, например, на носителе (непереносном носителе) запоминающего устройства, предусмотренном внутри или снаружи каждого устройства. В качестве примера, во время исполнения такие программы записываются в RAM (оперативную память) и выполняются процессором, таким как центральный процессор.
Заметим, что для процесса, описанного в настоящем описании со ссылкой на блок-схему последовательности выполнения операций, которая должна выполняться, нет необходимости исполняться в порядке, показанном на блок-схеме. Некоторые этапы процесса могут выполняться параллельно. Дополнительно, могут быть добавлены некоторые дополнительные этапы или некоторые этапы процесса могут быть исключены.
Дополнительно, результаты, представленные в настоящем описании, являются чисто иллюстративными или примерами результатов и не являются ограничительными. То есть, вместе с приведенными выше результатами или вместо них, основываясь на представлении настоящего описания, технология, соответствующая настоящему раскрытию, может достигать других результатов, понятных специалистам в данной области техники.
Дополнительно, настоящая технология может также быть выполнена в виде, представленном ниже.
(1) Устройство управления связью содержащее:
блок связи, выполненный с возможностью осуществления связи с устройством, принадлежащим к первой радиосети; и
блок управления, выполненный с возможностью управления тем, выполняет ли устройство радиосвязи, принадлежащее к первой радиосети, скачкообразную перестройку частоты, основываясь на информации второй радиосети, отличающейся от первой радиосети.
(2) Устройство управления связью по (1),
в котором блок управления выполнен с возможностью управления тем, выполняется ли скачкообразная перестройка частоты, на основе приоритета второй радиосети.
(3) Устройство управления связью по (1) или (2),
в котором блок управления выполнен с возможностью принятия решения, что скачкообразная перестройка частоты выполняется в полосе частот, перекрывающейся с полосой частот, используемой второй радиосетью.
(4) Устройство управления связью по любому из (1)-(3),
в котором блок управления выполнен с возможностью принятия решения о шаблоне скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой устройством радиосвязи, принадлежащим к первой радиосети.
(5) Устройство управления связью по (4),
в котором блок управления выполнен с возможностью принятия решения о шаблоне скачкообразной перестройки, отличающемся от шаблона скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой второй радиосетью.
(6) Устройство управления связью по (4) или (5),
в котором скачкообразная перестройка в направлении частоты определяется в шаблоне скачкообразной перестройки в любом блоке, по меньшей мере, из числа блока поднесущей, ресурсного блока или блока компонентной несущей.
(7) Устройство управления связью по любому из (4)-(6),
в котором скачкообразная перестройка в направлении времени определяется в шаблоне скачкообразной перестройки в любом блоке, по меньшей мере, из числа блока символов, блока слота или блока субкадра.
(8) Устройство управления связью по любому из (1)-(7),
в котором блок управления управляет тем, выполняется ли скачкообразная перестройка частоты, на основе того, существует ли вероятность взаимных помех первой радиосети со второй радиосетью.
(9) Устройство управления связью по (8),
в котором блок управления выполнен с возможностью принятия решения, что существует вероятность взаимных помех, когда существует вероятность, что полоса частот, используемая первой радиосетью, по меньшей мере частично перекрывается полосой частот, используемой второй радиосетью.
(10) Устройство управления связью по (9),
в котором блок управления выполнен с возможностью определения, на основе информации второй радиосети, изменяет ли вторая радиосеть во времени используемую полосу частот.
(11) Устройство управления связью по (10),
в котором блок управления выполнен с возможностью определения, что существует вероятность перекрытия в случае, когда вторая радиосеть изменяет во времени используемую полосу частот.
(12) Устройство управления связью по (11),
в котором блок управления выполнен с возможностью определения, что существует вероятность перекрытия, когда направление, в котором вторая радиосеть изменяет во времени используемую полосу частот, является направлением, приближающимся к полосе частот, используемой первой радиосетью.
(13) Устройство управления связью по (11) или (12),
в котором блок управления выполнен с возможностью определения, что отсутствует вероятность перекрытия в случае, когда направление, в котором вторая радиосеть изменяет во времени используемую полосу частот, является направлением, удаляющимся от полосы частот, используемой первой радиосетью.
(14) Устройство управления связью по любому из (9)- (13),
в котором блок управления выполнен с возможностью определения, что существует вероятность взаимных помех в случае, когда местоположение действия первой радиосети, по меньшей мере частично перекрывается местоположением действия второй радиосети.
(15) Устройство управления связью по любому из (9)-(14),
в котором блок управления выполнен с возможностью определения, что существует вероятность взаимных помех в случае, когда рабочий временной слот первой радиосети, по меньшей мере частично перекрывается рабочим временным слотом второй радиосети.
(16) Устройство управления связью по любому из (1)-(15),
в котором блок управления выполнен с возможностью управления, выполнять ли скачкообразную перестройку частоты, на основе отношения перекрытия между полосой частот, используемой первой радиосетью, и полосой частот, используемой второй радиосетью.
(17) Устройство управления связью по любому из (1)-(16),
в котором блок управления выполнен с возможностью приема решения, что скачкообразная перестройка частоты выполняется, когда по закону требуется получать информацию второй радиосети.
(18) Устройство управления связью по любому из (1)-(17),
в котором блок связи выполнен с возможностью получения информации второй радиосети от запоминающего устройства.
(19) Устройство управления связью по любому из (1)-(18),
в котором блок связи выполнен с возможностью получения информации второй радиосети от устройства датчика.
(20) Устройство управления связью по любому из (1)-(19),
в котором информация второй радиосети содержит информацию, указывающую приоритет второй радиосети.
(21) Устройство управления связью по любому из (1)-(20),
в котором информация второй радиосети содержит информацию, относящуюся к полосе частот, используемой второй радиосетью.
(22) Устройство управления связью по любому из (1)-(21),
в котором информация второй радиосети содержит информацию, относящуюся к местоположению, в котором действует вторая радиосеть.
(23) Устройство управления связью по любому из (1)-(22),
в котором информация второй радиосети содержит информацию, относящуюся к временному слоту, в котором действует вторая радиосеть.
(24) Устройство управления связью по любому из (1)-(23),
в котором блок управления выполнен с возможностью управления устройством радиосвязи, принадлежащим к первой радиосети для передачи данных, выполняя в то же время скачкообразную перестройку частоты.
(25) Устройство управления связью по (24),
в котором блок управления выполнен с возможностью управления для передачи информации, относящейся к скачкообразной перестройке частоты, выполняемой устройством радиосвязи, принадлежащим к первой радиосети, другим устройствам радиосвязи, принадлежащим к первой радиосети.
(26) Устройство управления связью по (25),
в котором информация, относящаяся к скачкообразной перестройке частоты, передается устройством радиосвязи, принадлежащим к первой радиосети.
(27) Устройство управления связью по (25),
в котором информация, относящаяся к скачкообразной перестройке частоты, одноадресно передается устройством радиосвязи, принадлежащим к первой радиосети.
(28) Устройство управления связью по (25),
в котором информация, относящаяся к скачкообразной перестройке частоты, передается устройством радиосвязи, принадлежащим к первой радиосети, используя канал управления для каждой линии связи.
(29) Устройство управления связью по любому из (1)-(23),
в котором блок управления выполнен с возможностью управления другими устройствами радиосвязи, принадлежащими к первой радиосети, для приема данных, передаваемых устройством радиосвязи, принадлежащим к первой радиосети, в то время как скачкообразная перестройка частоты выполняется, на основе информации, относящейся к скачкообразной перестройки частоты.
(30) Устройство управления связью по любому из (1)-(23),
в котором блок управления выполнен с возможностью управления запоминающим устройством, для сохранения информации второй радиосети.
(31) Устройство управления связью по любому из (1)-(23),
в котором блок управления выполнен с возможностью управления устройством датчика, выполненным с возможностью обнаружения информации второй радиосети, для обнаружения полосы частот, более широкой, чем полоса частот, используемая первой радиосетью.
(32) Устройство управления связью по (31),
в котором блок управления выполнен с возможностью управления устройством датчика, для разделения полосы частот на множество полос и обнаружения полосы.
(33) Способ управления связью, содержащий этапы, на которых:
осуществляют связь с устройством, принадлежащим к первой радиосети; и
управляют тем, выполняет ли устройство радиосвязи, принадлежащее к первой радиосети, скачкообразную перестройку частоты, на основе информации второй радиосети, отличающейся от первой радиосети.
(34) Программа, вызывающая функционирование компьютера в качестве:
блока связи, выполненного с возможностью связи с устройством, принадлежащим к первой радиосети; и
блока управления, выполненного с возможностью управления тем, выполняет ли устройство радиосвязи, принадлежащее к первой радиосети, скачкообразную перестройку частоты, на основе информации второй радиосети, отличающейся от первой радиосети.
Перечень ссылочных позиций
1 Система связи
10 Система радиосвязи
100 Приемная станция
110 Модуль связи
120 Блок управления
200 Передающ46ая станция
210 Блок связи
220 Блок управления
300 Устройство управления связью
310 Блок связи
320 Блок управления
400 DB
410 Блок связи
420 Блок управления
430 Запоминающее устройство
500 Устройство датчика
510 Блок связи
520 Блок управления
530 Блок датчика
600 Базовая сеть
700 Сеть связи
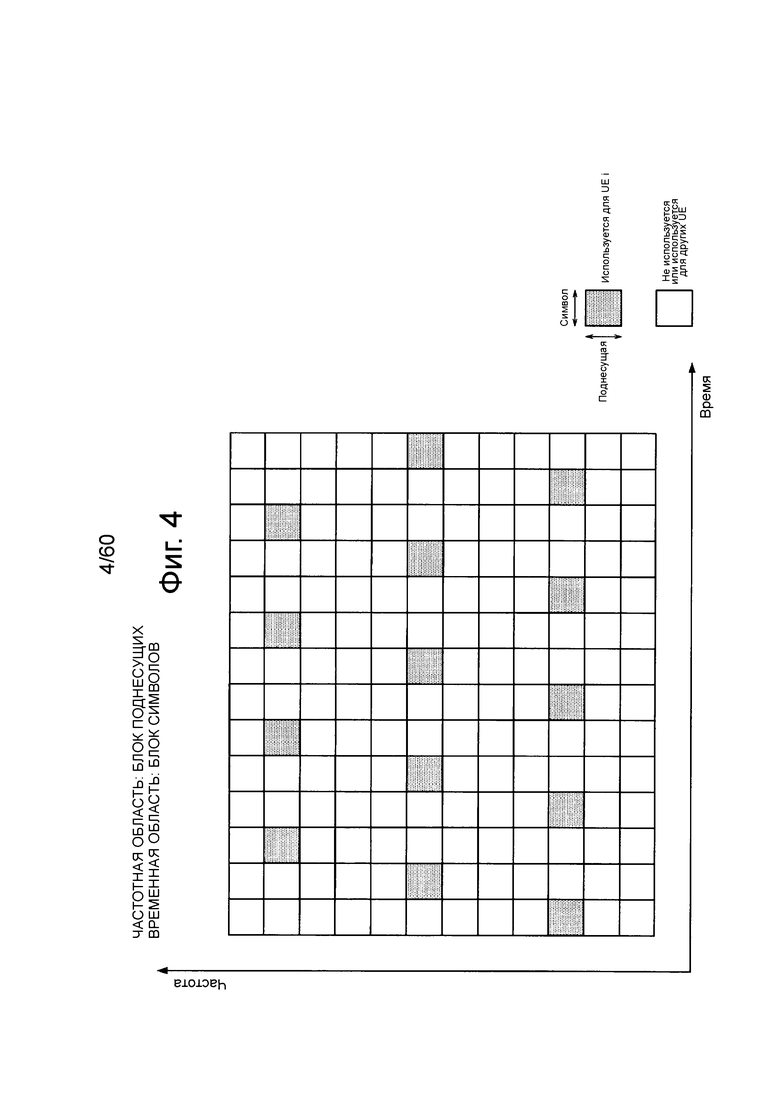
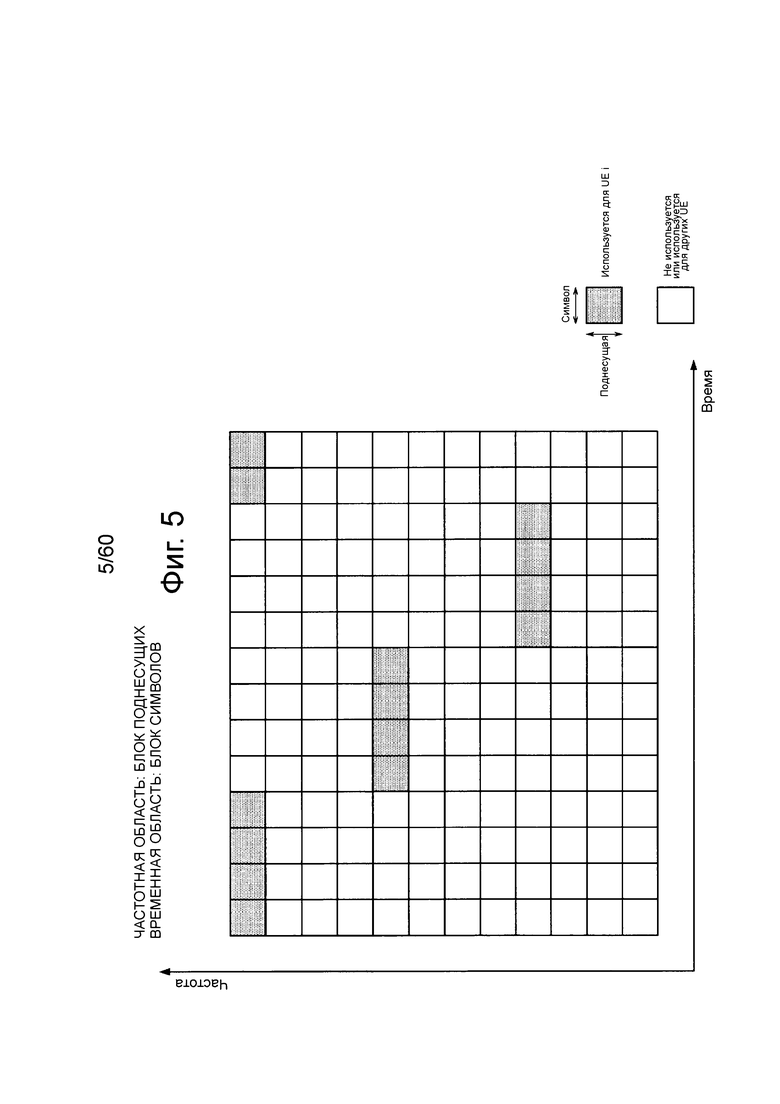
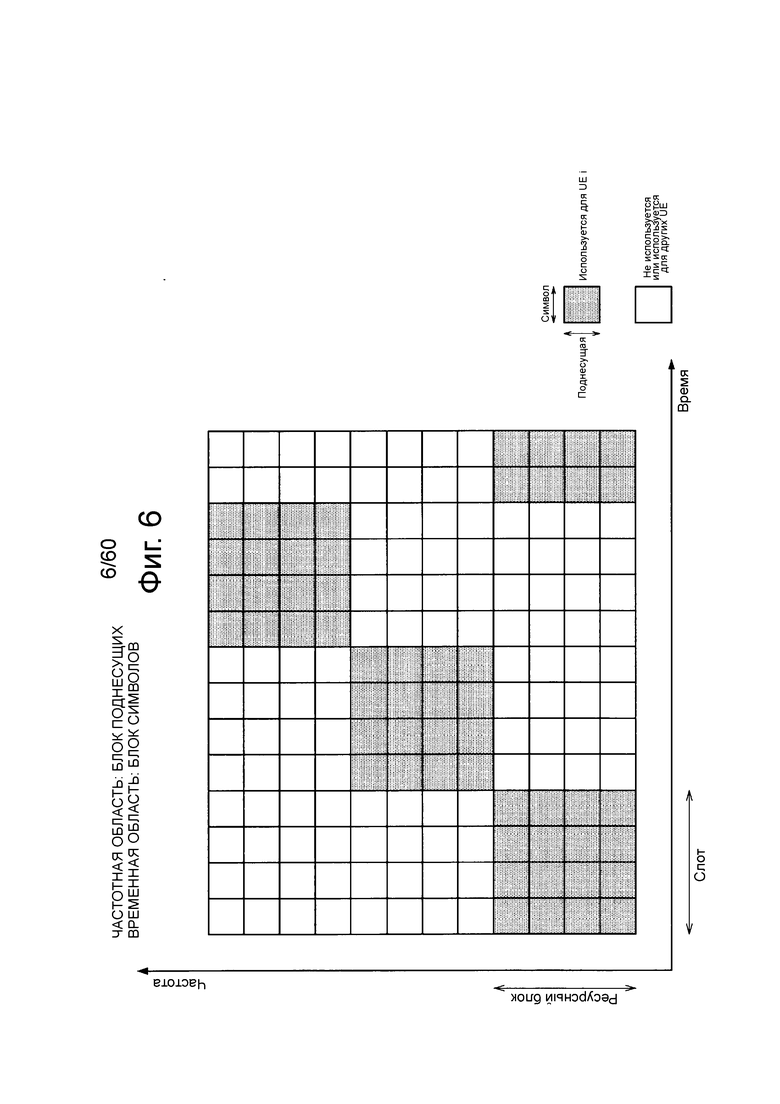
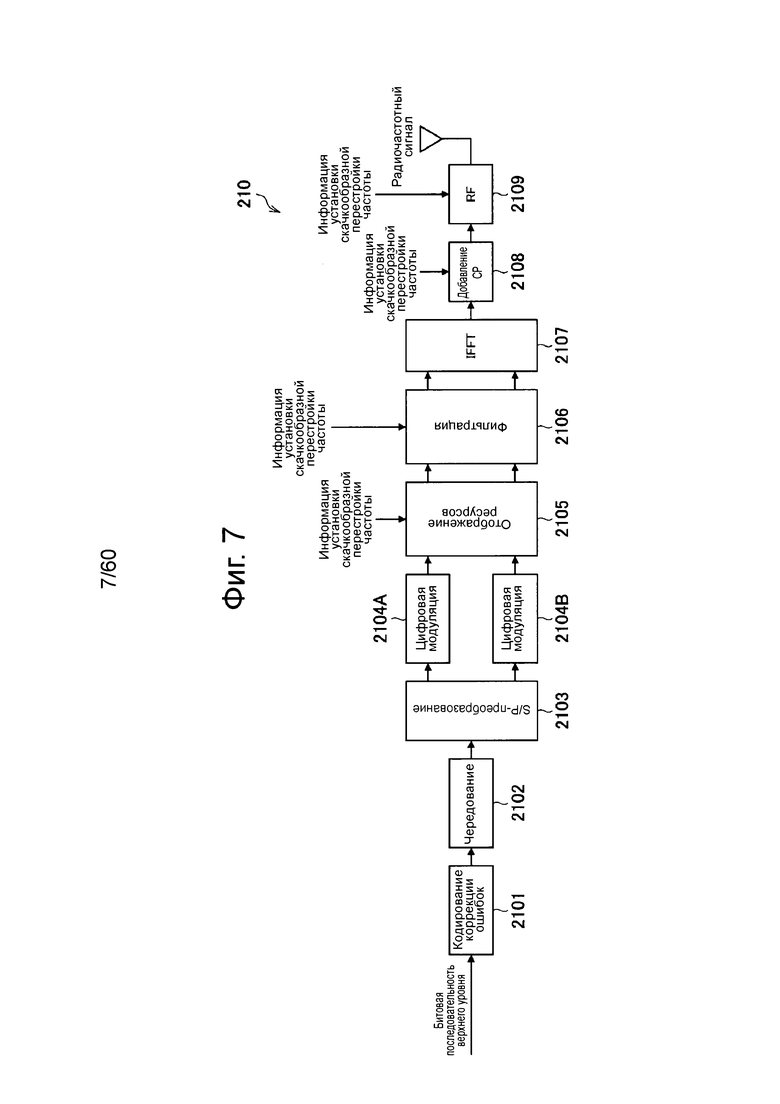
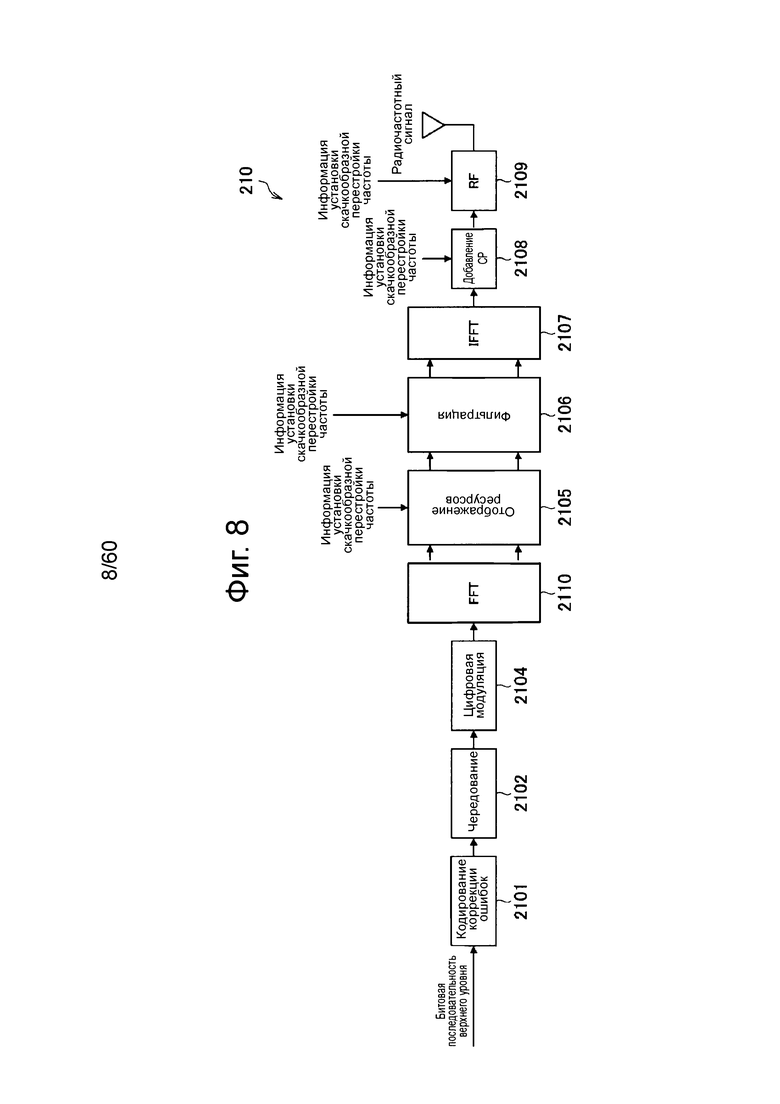
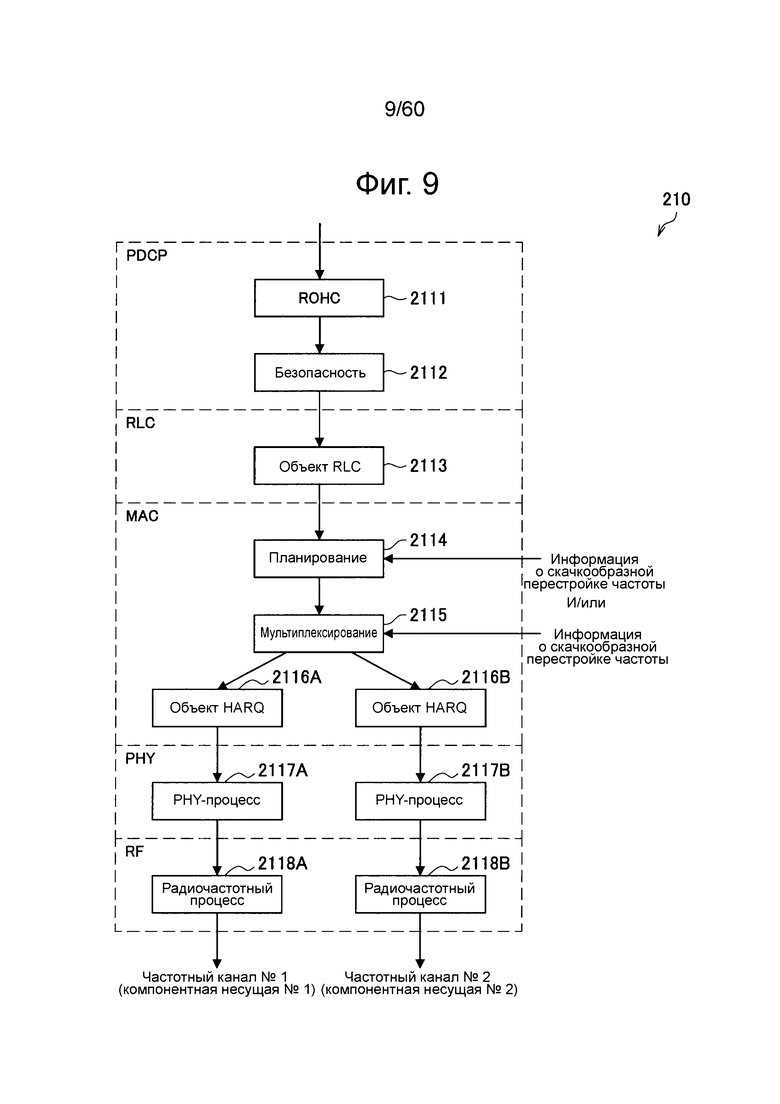
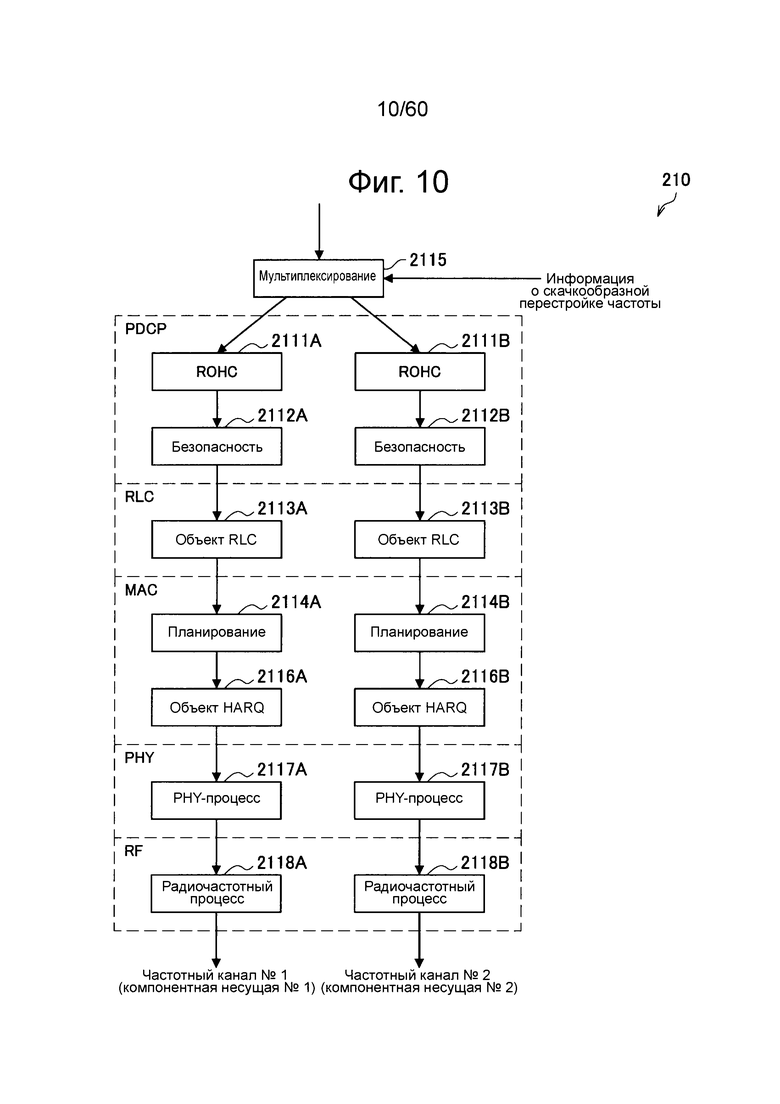
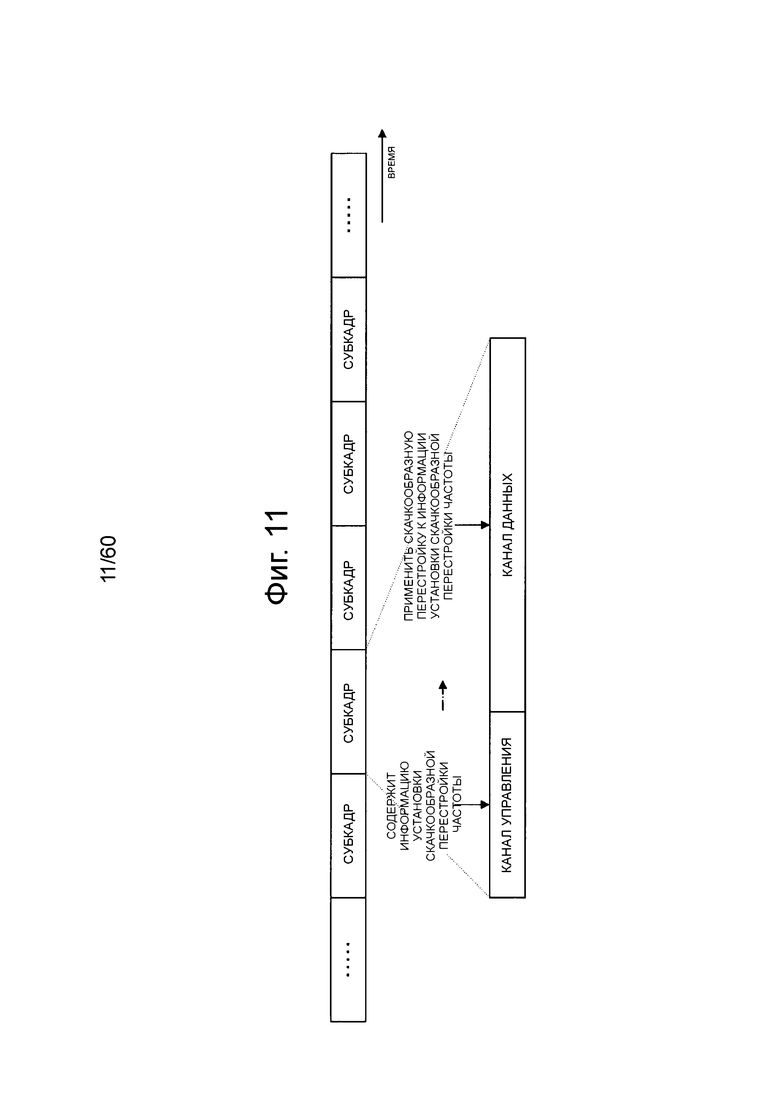
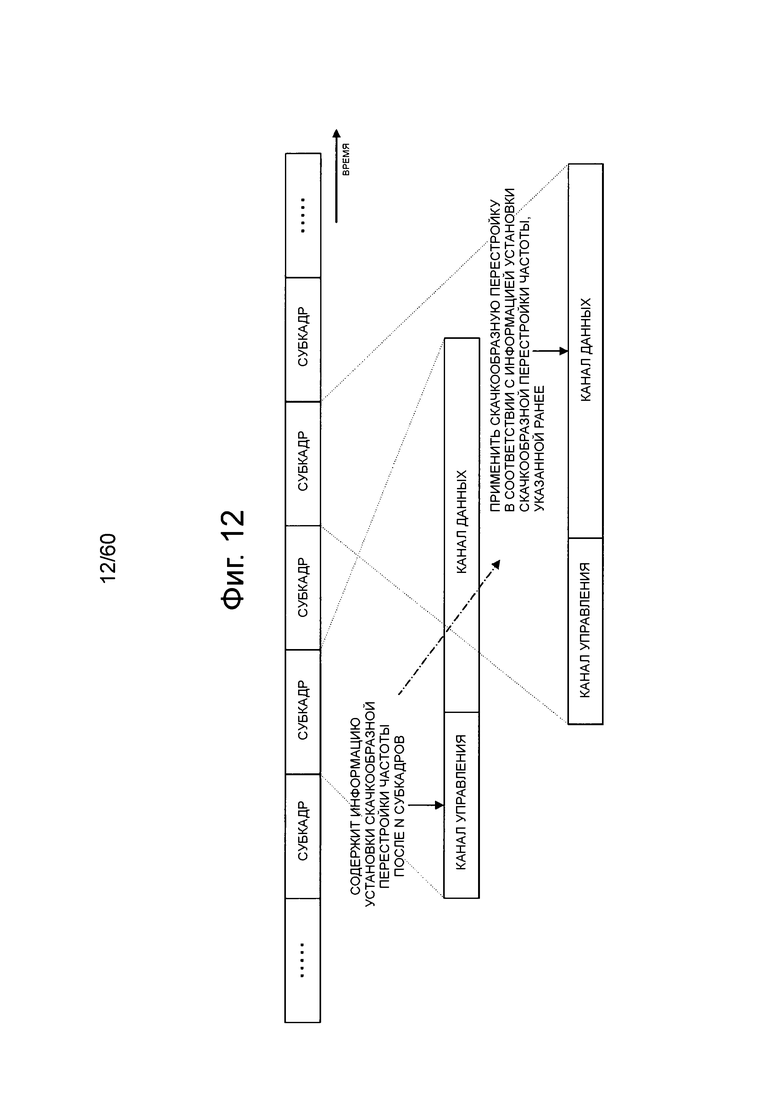
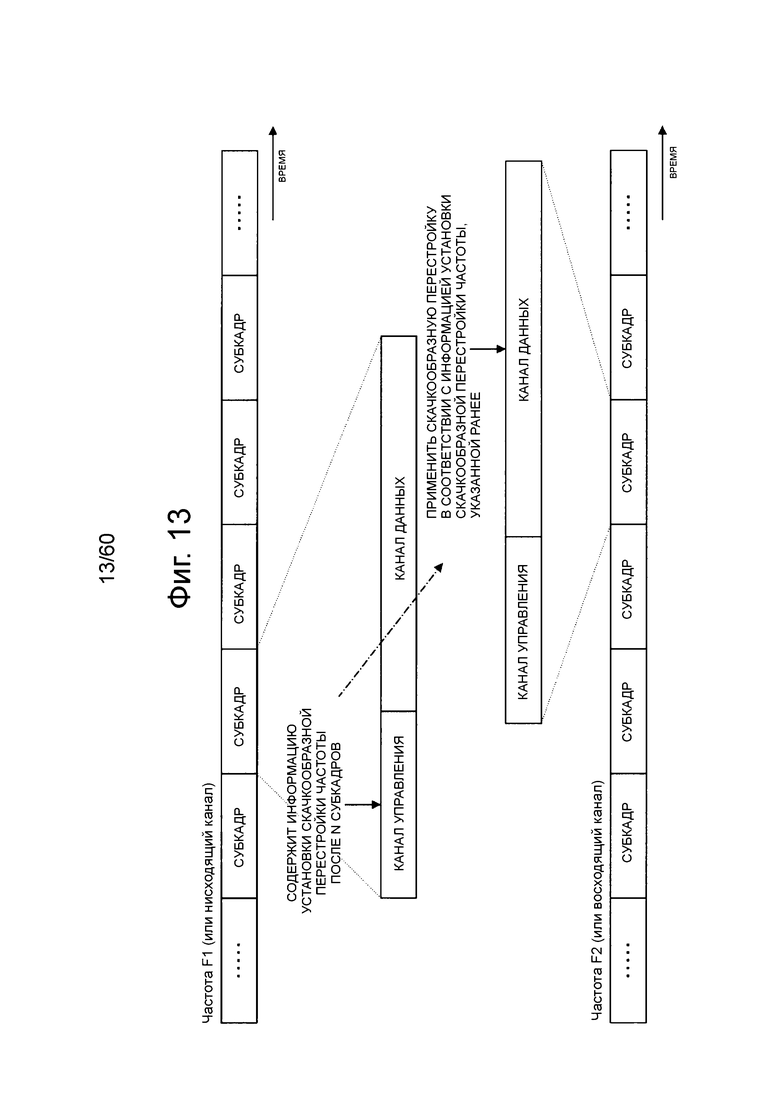
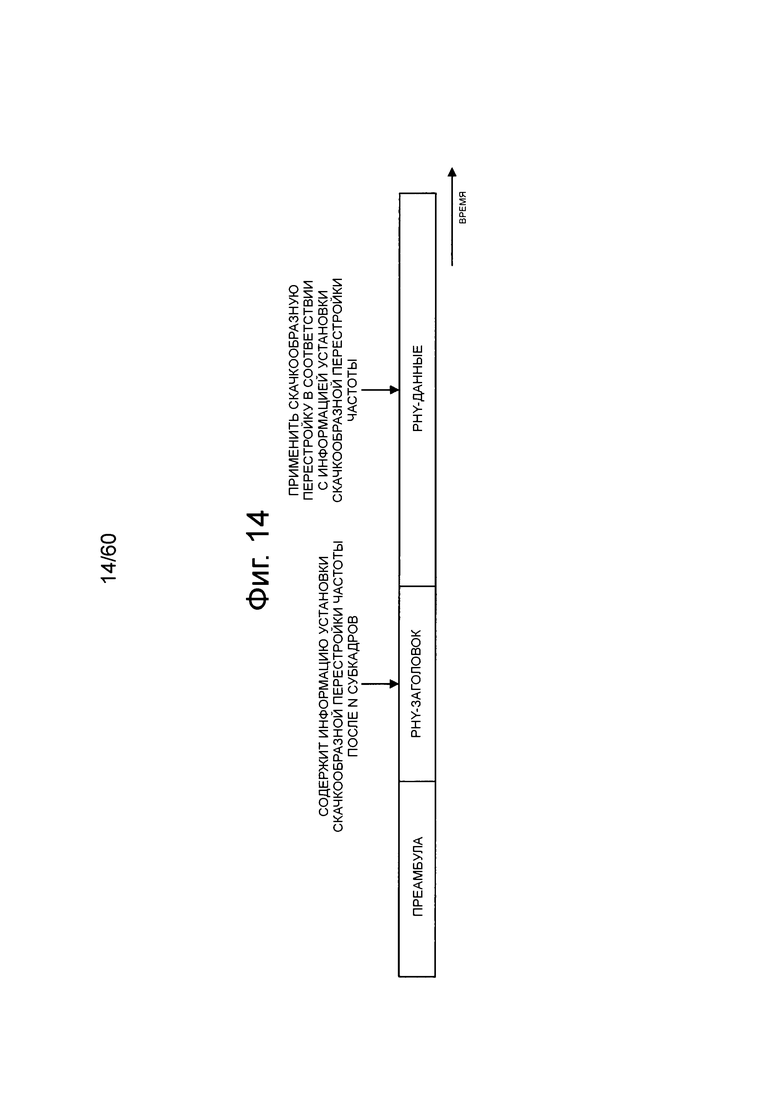
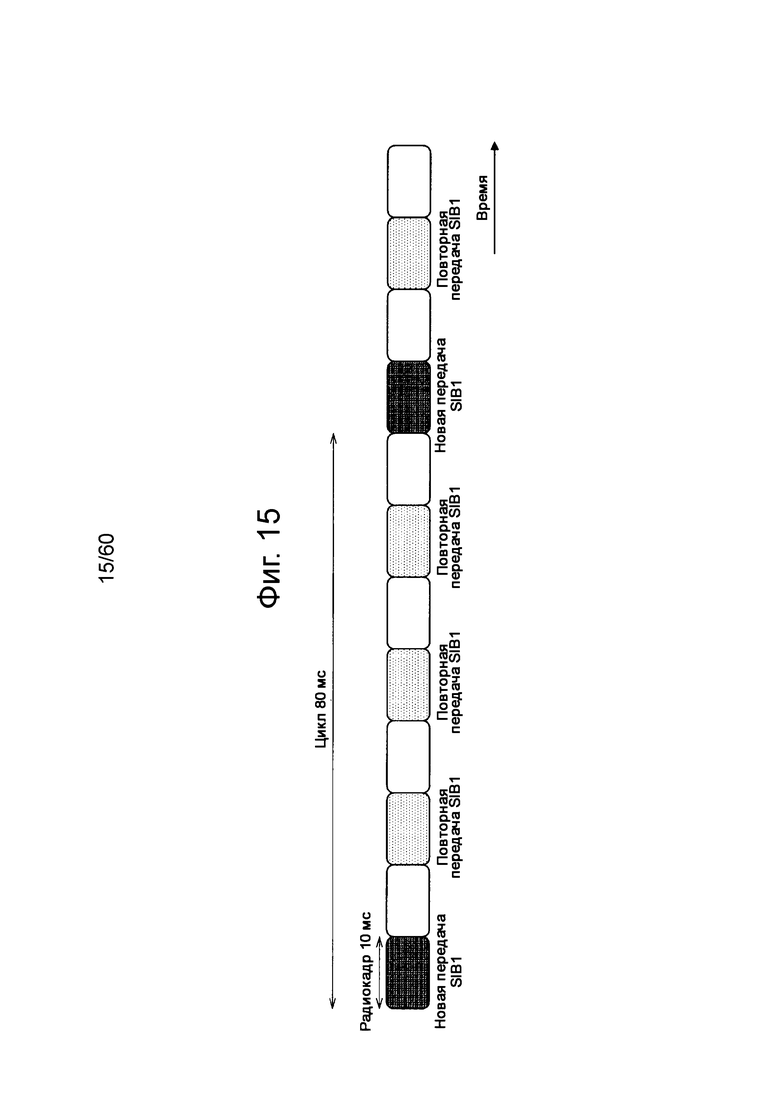
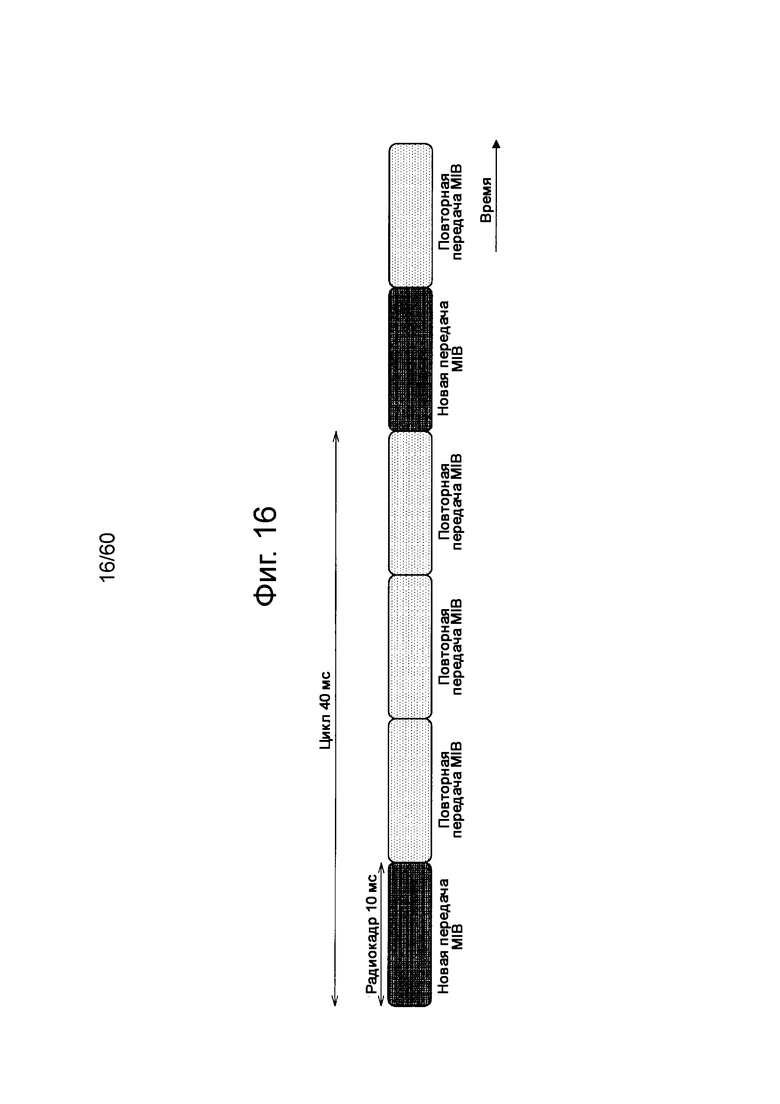
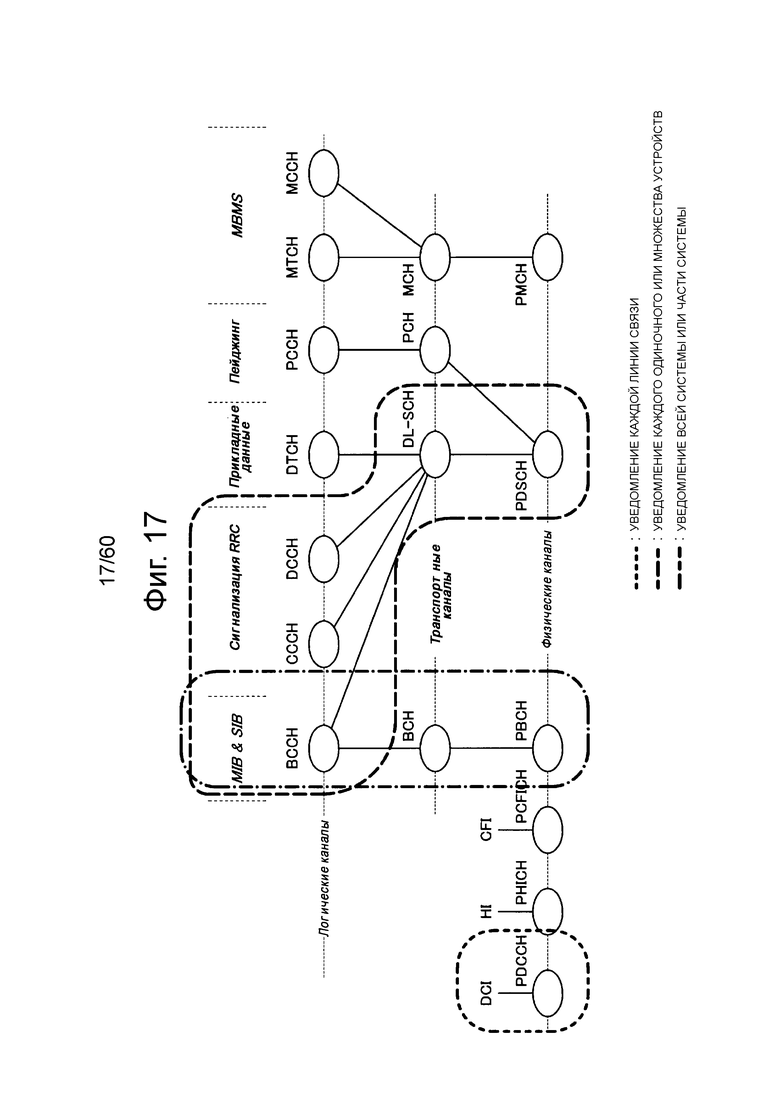
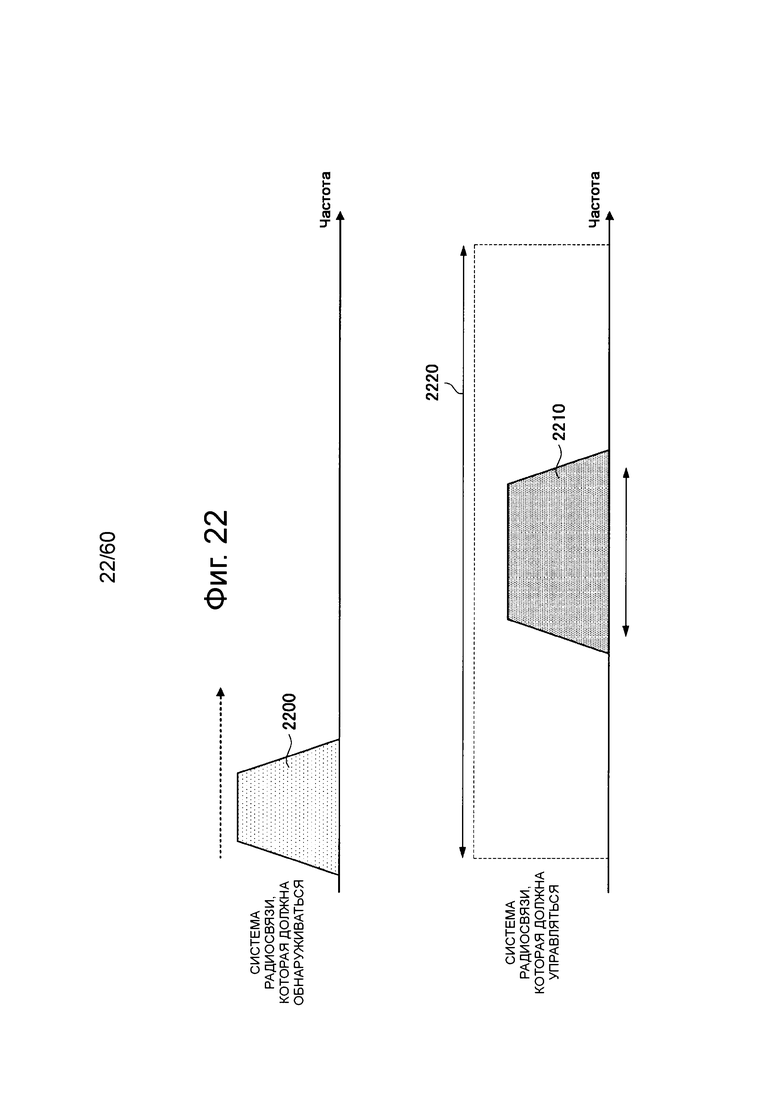
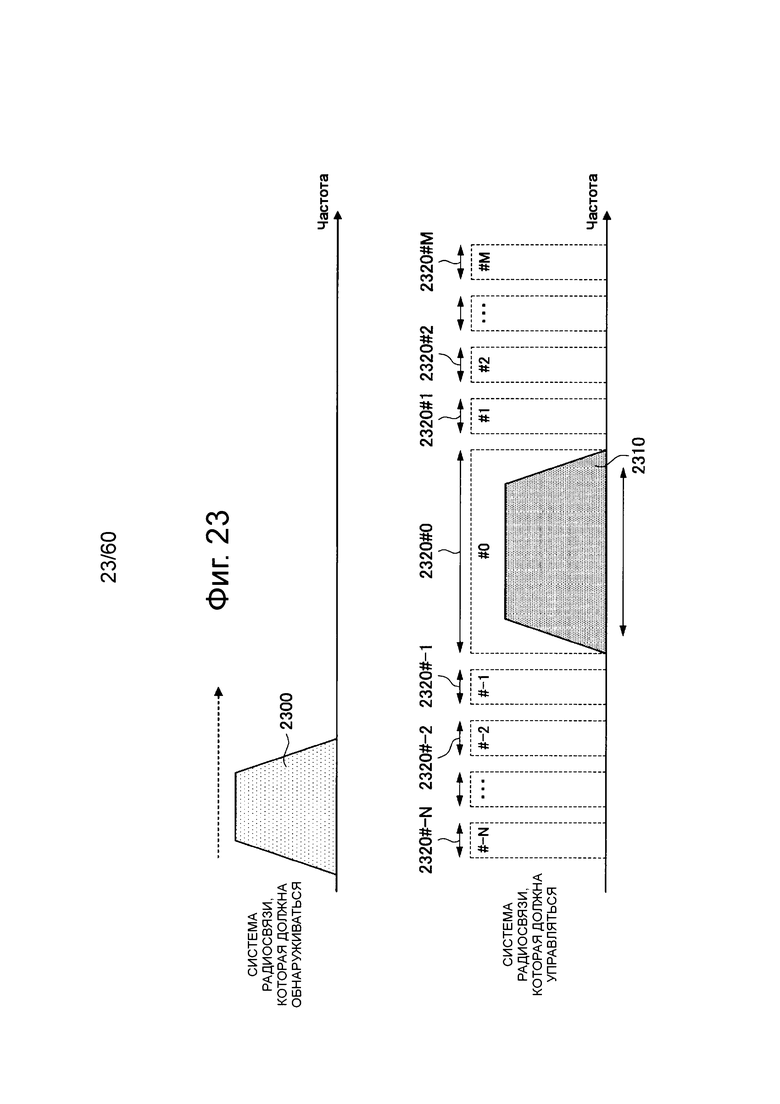
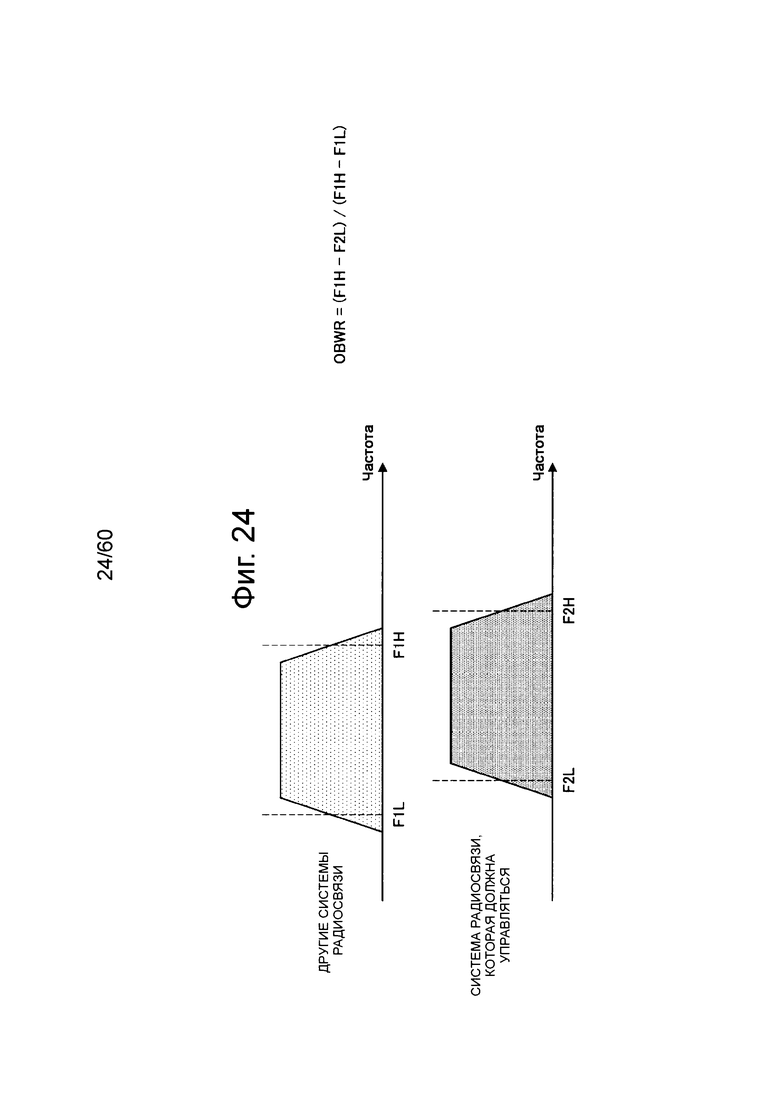
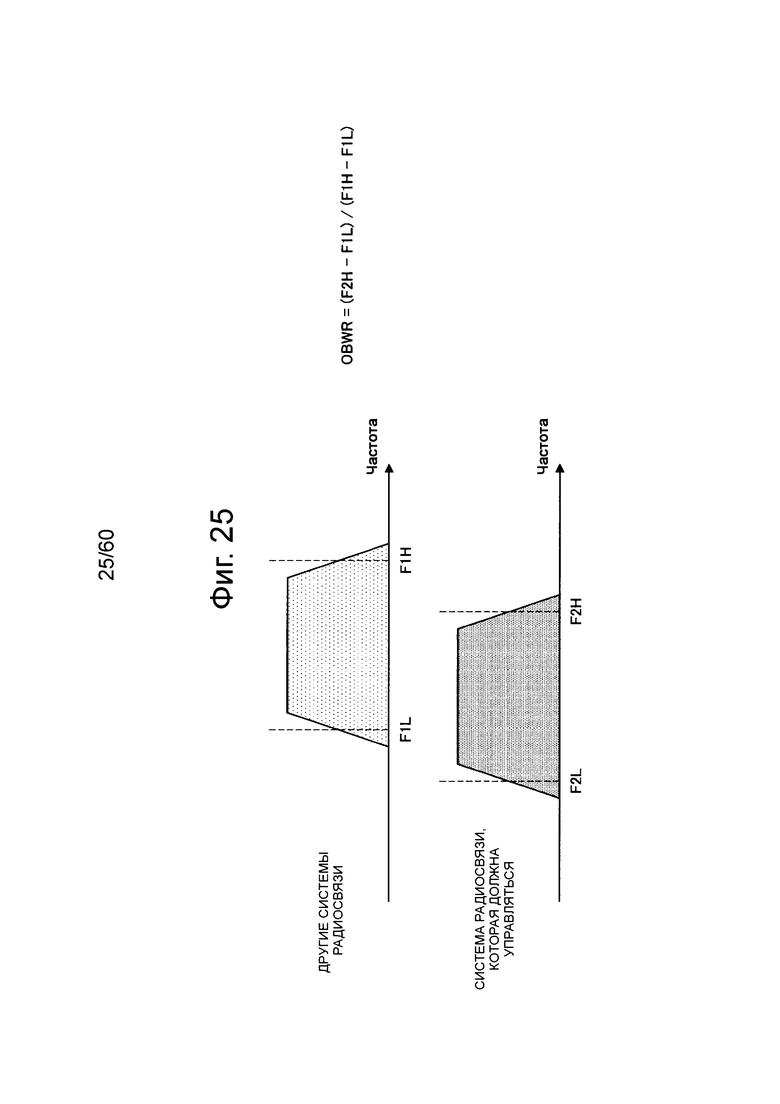
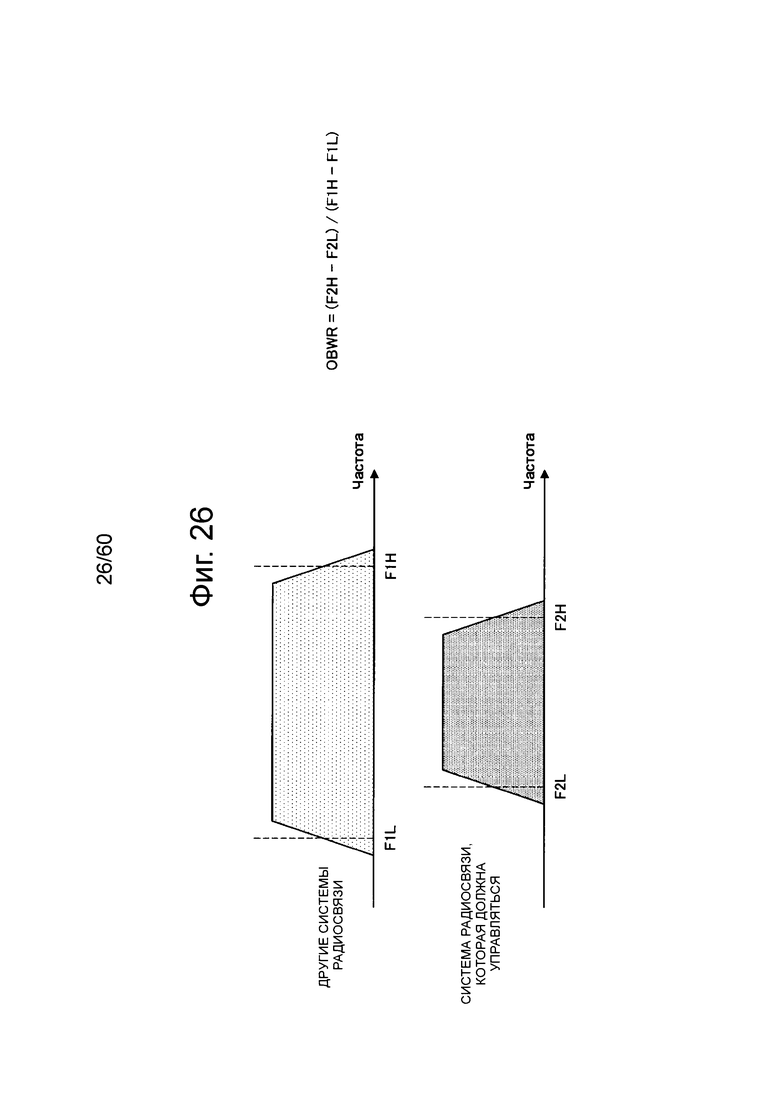
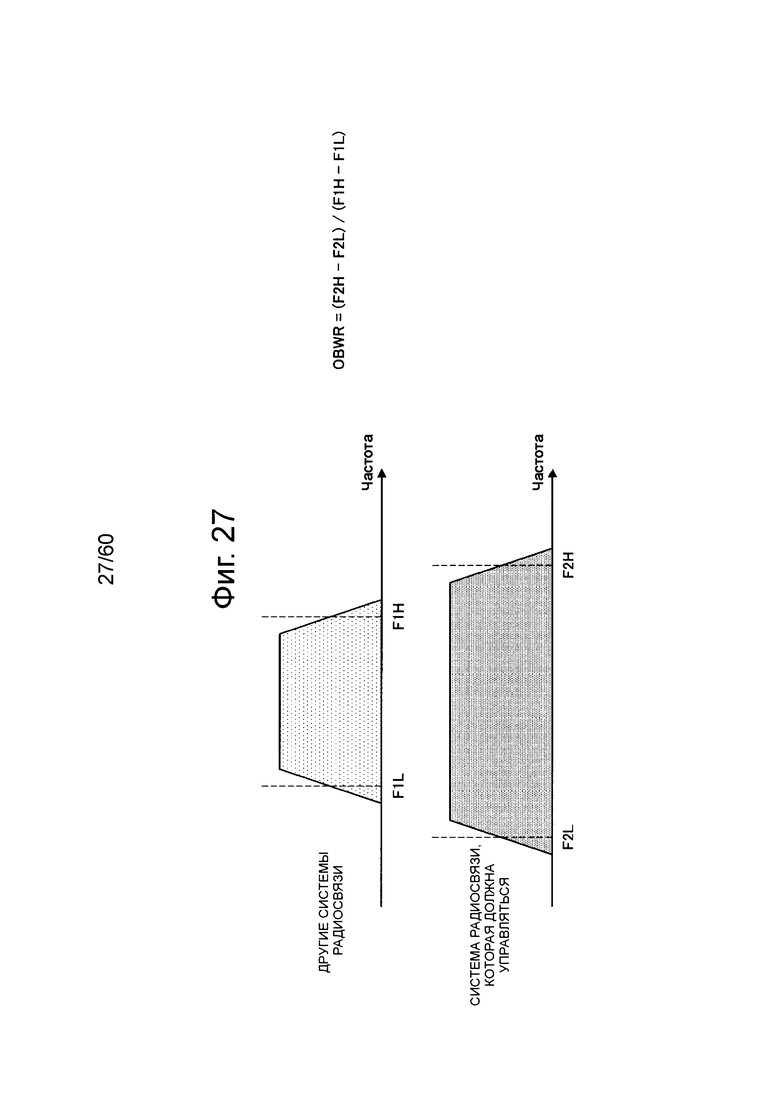
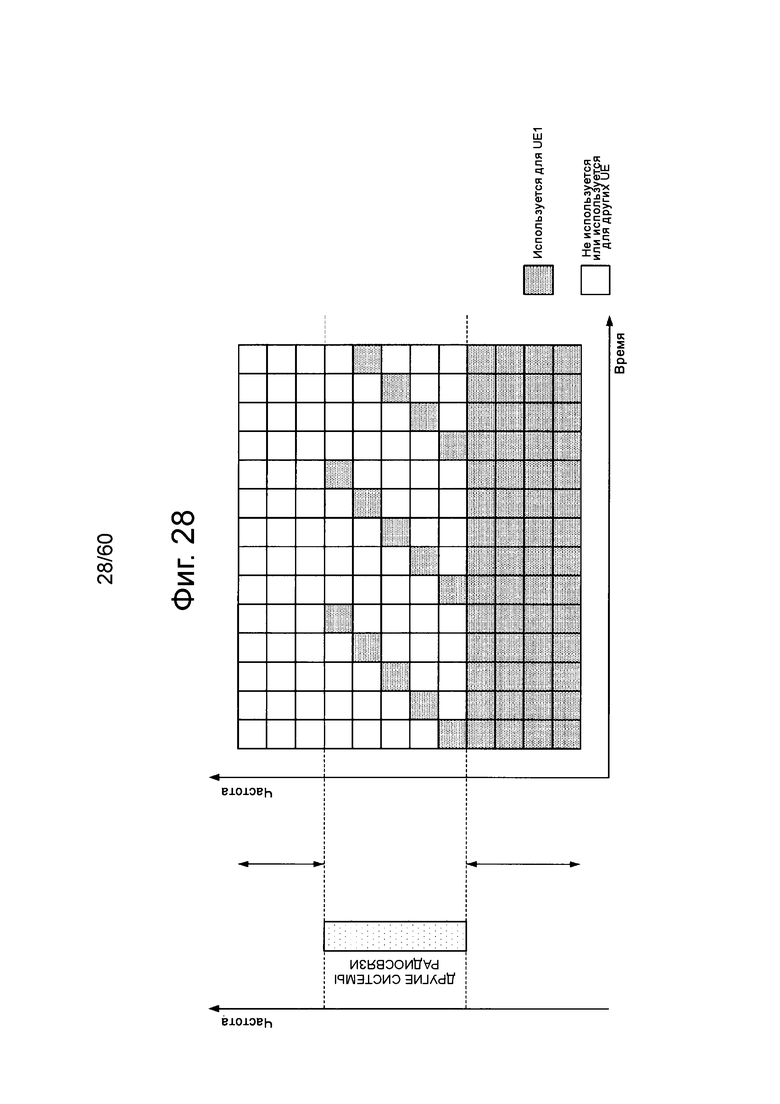
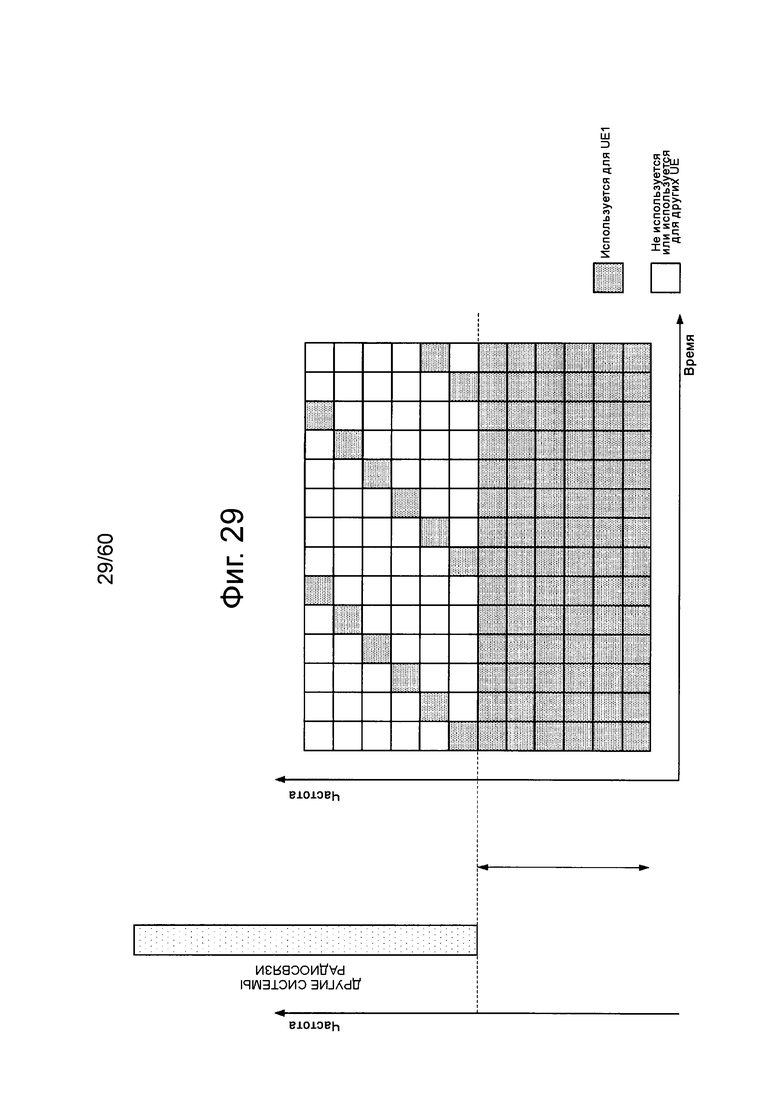
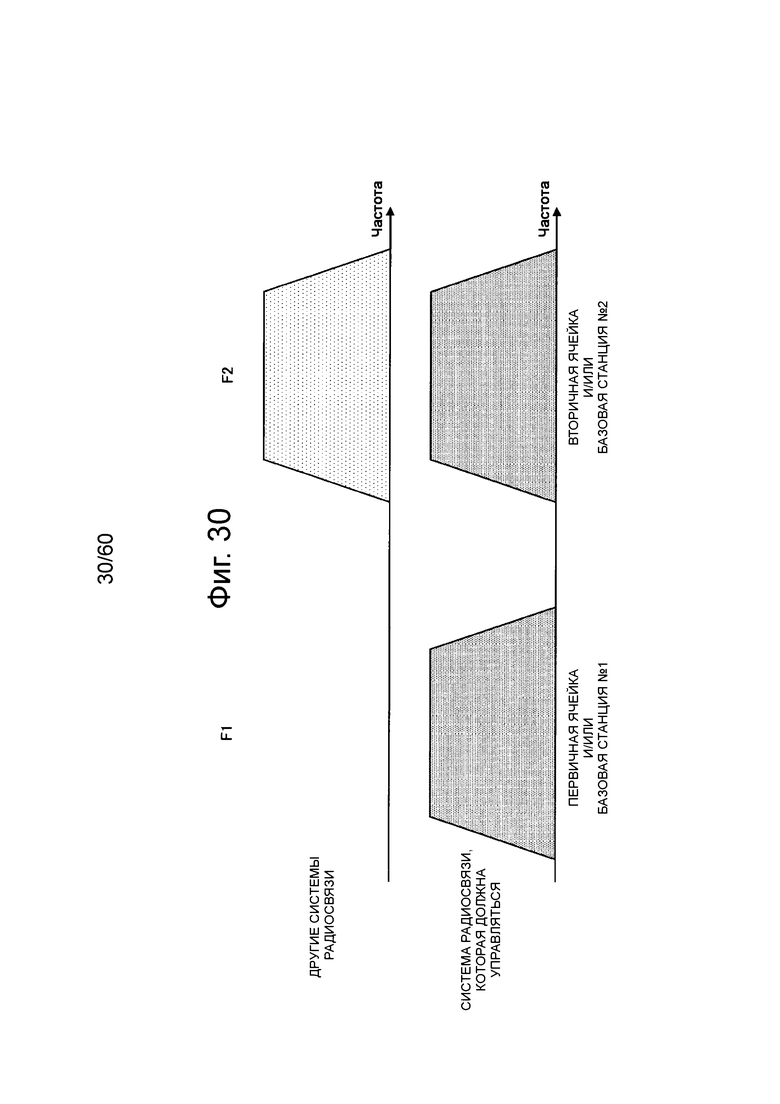
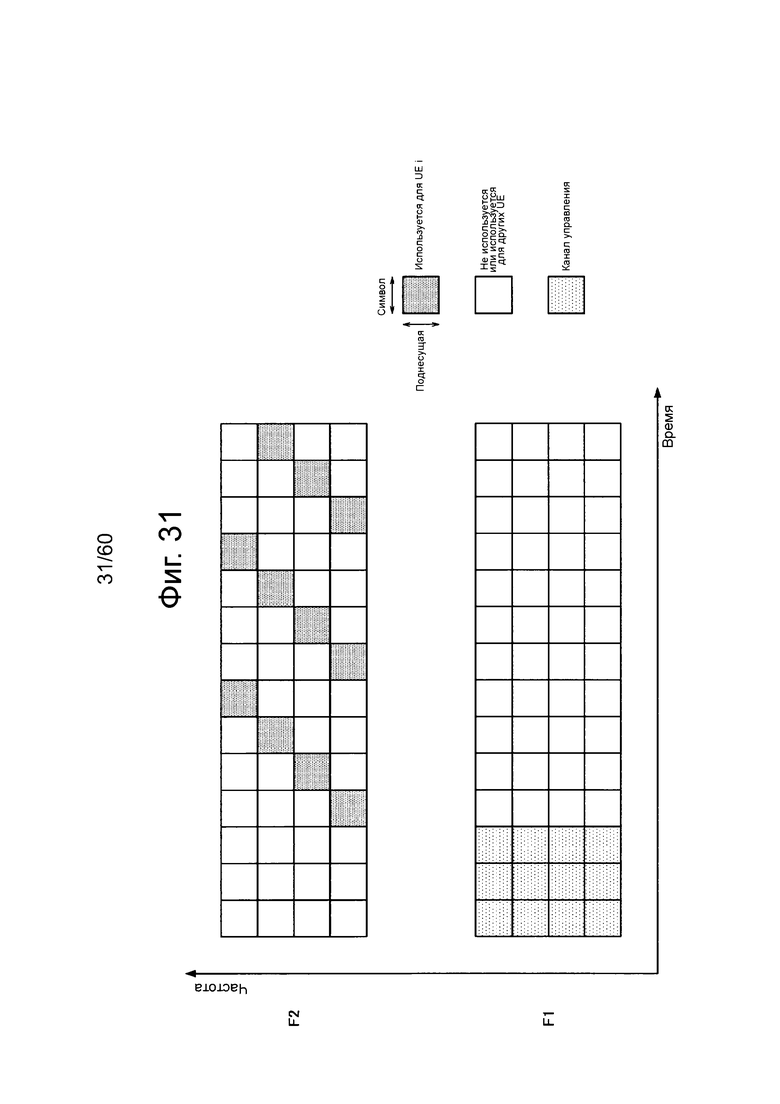
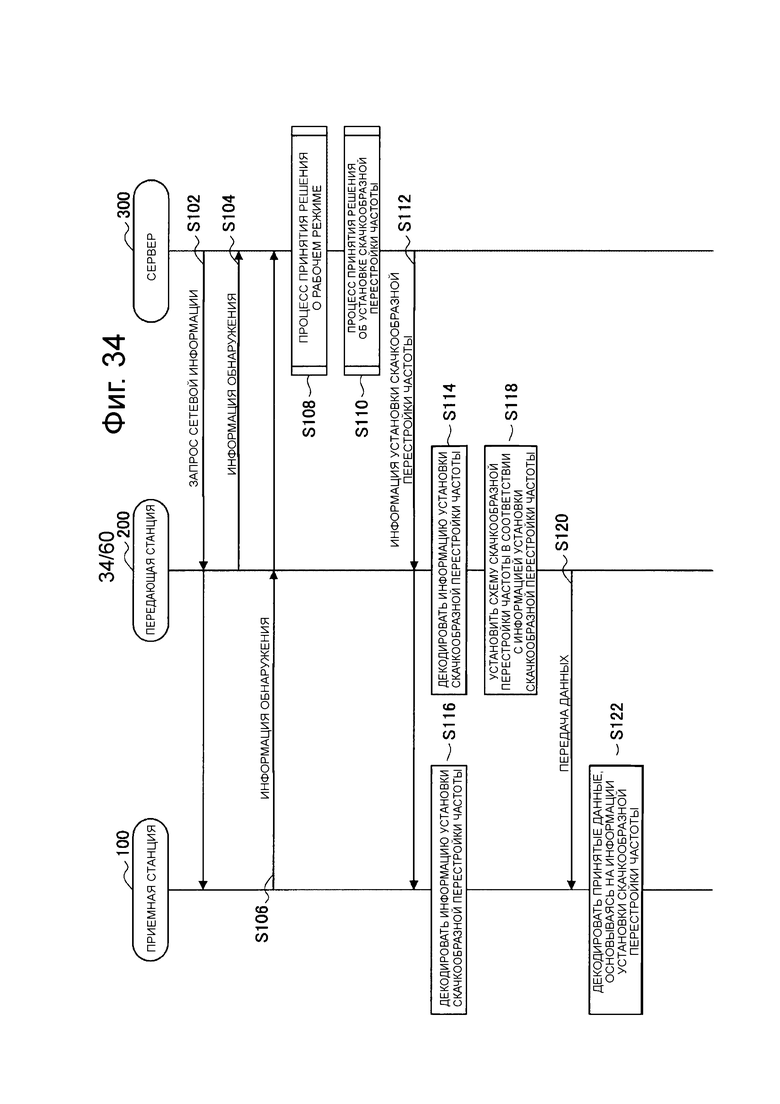
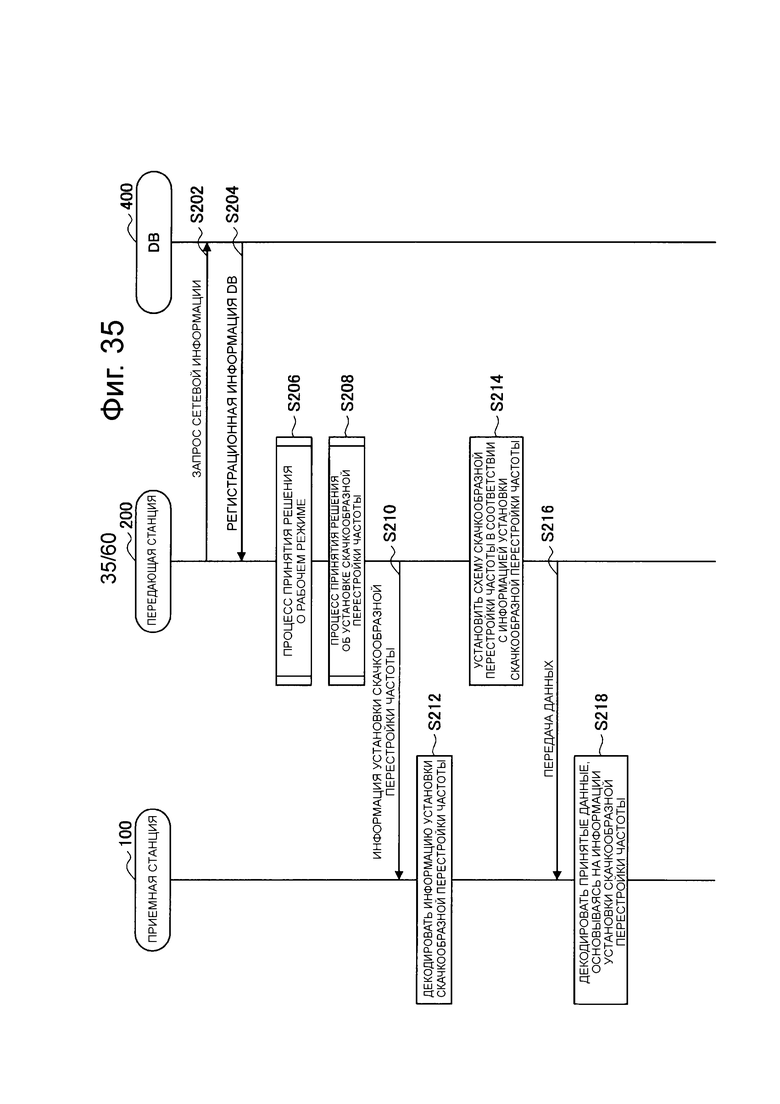
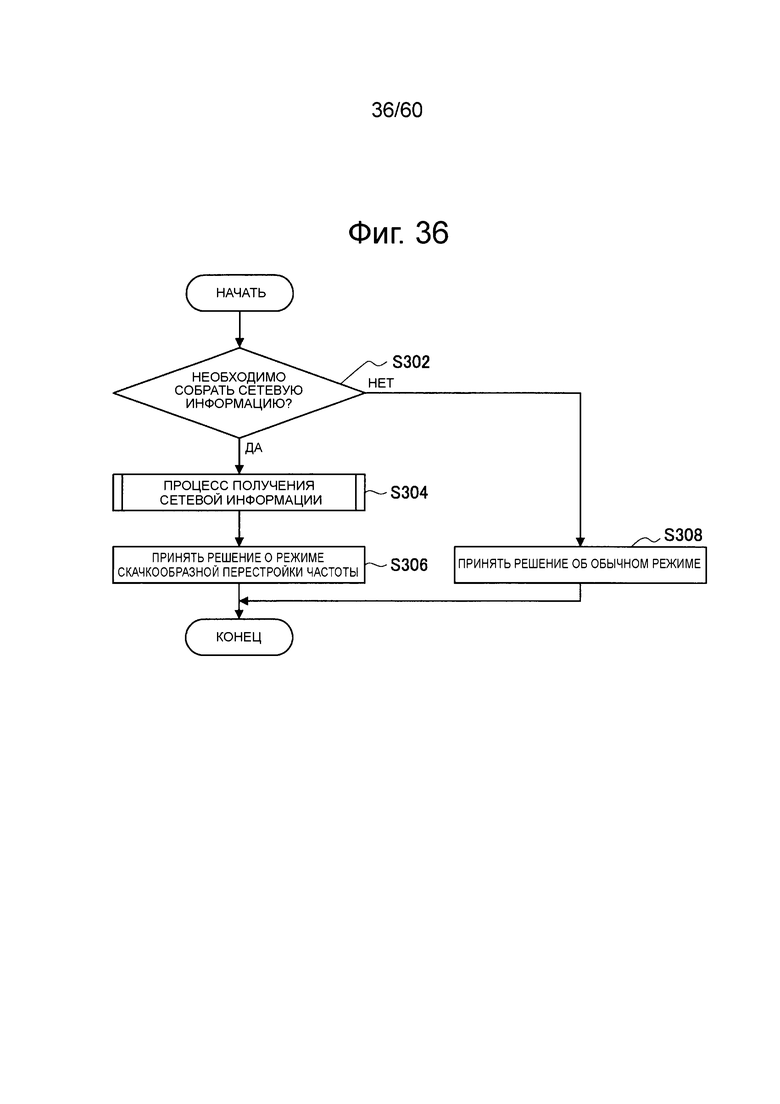
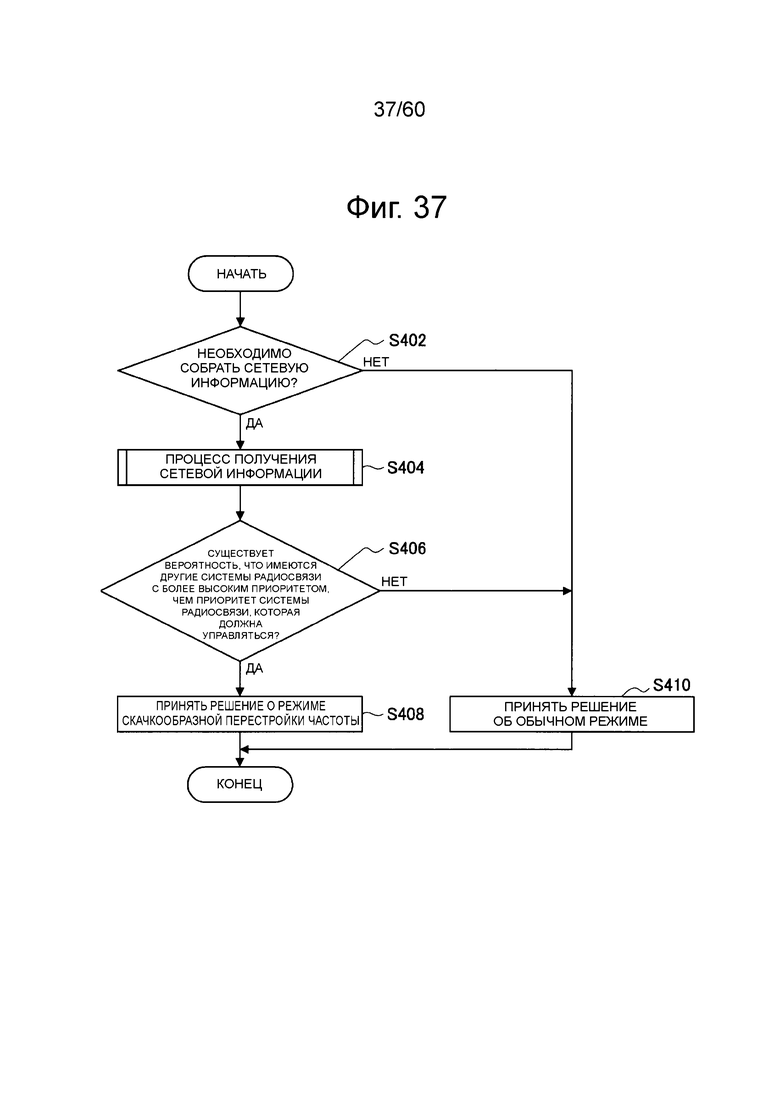
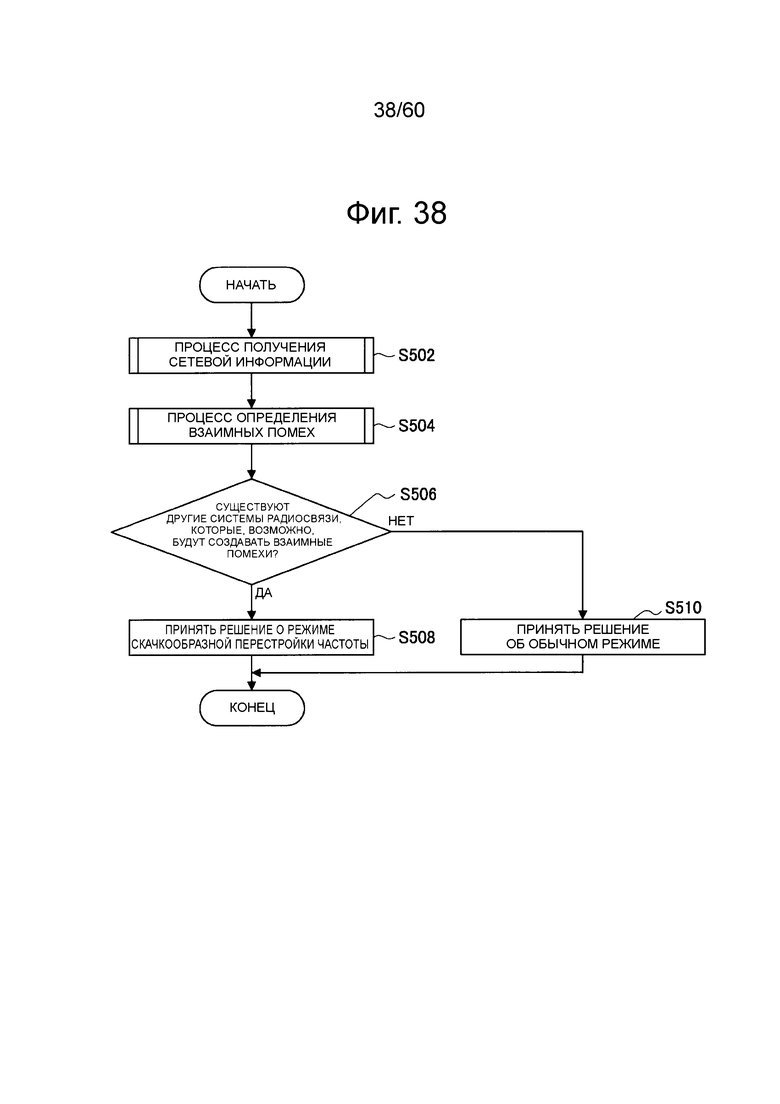
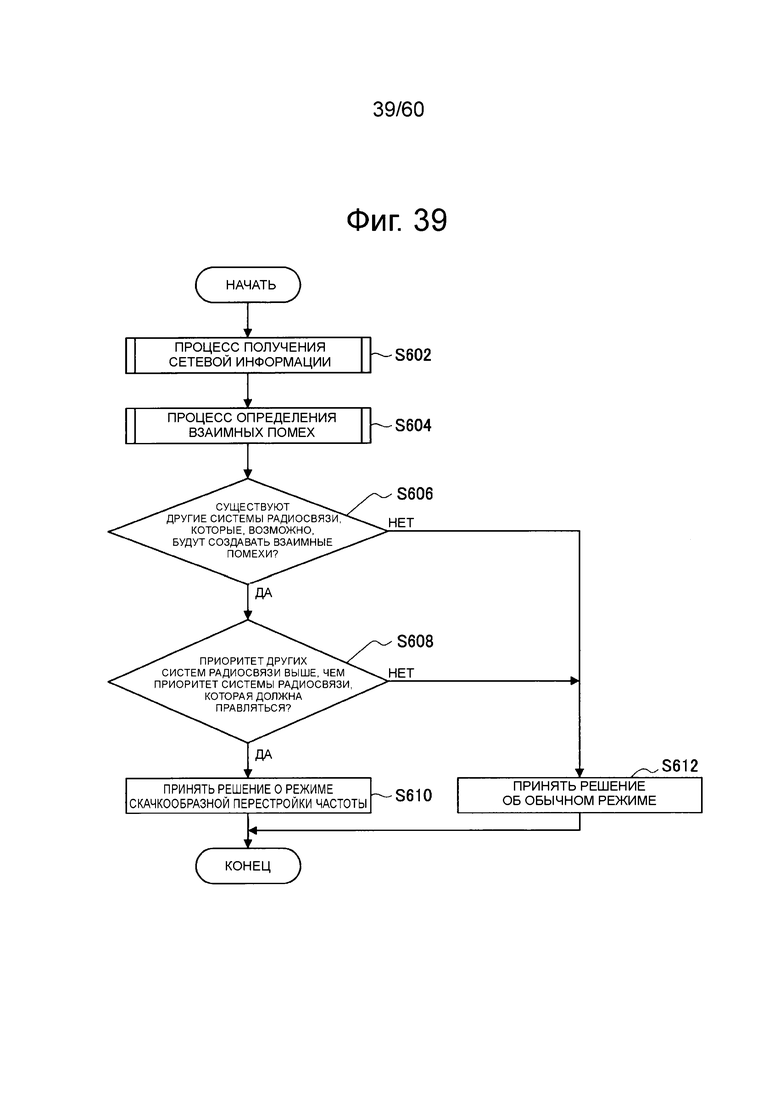
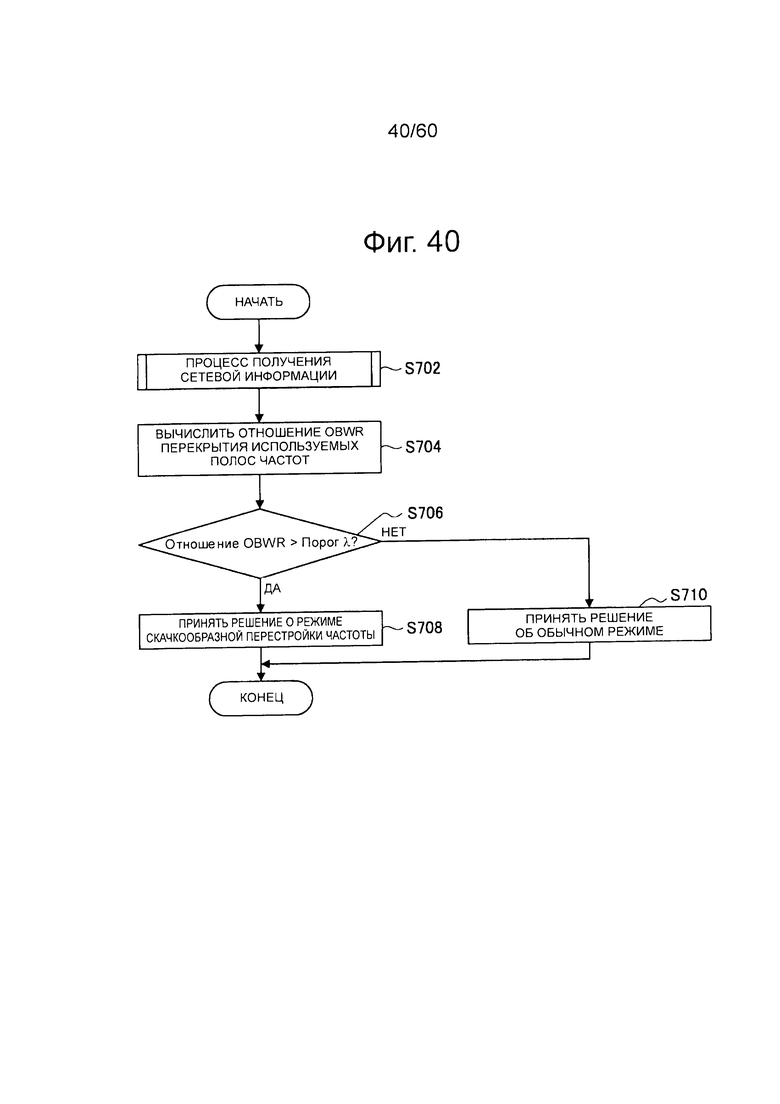
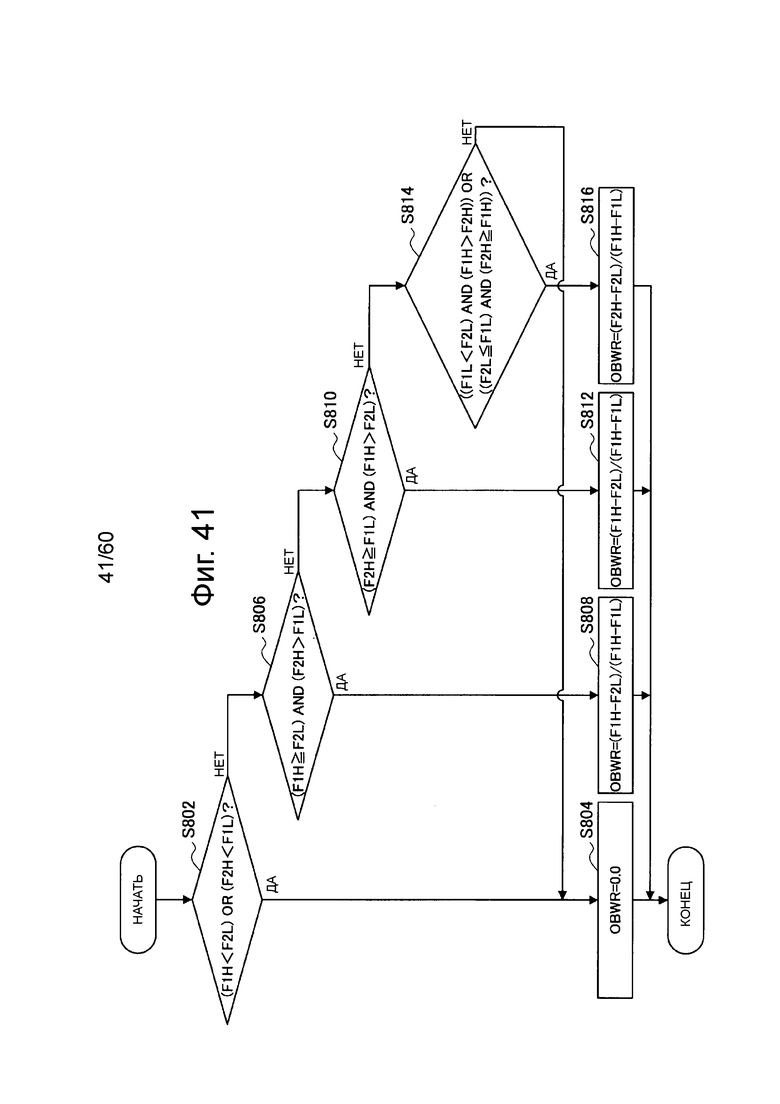
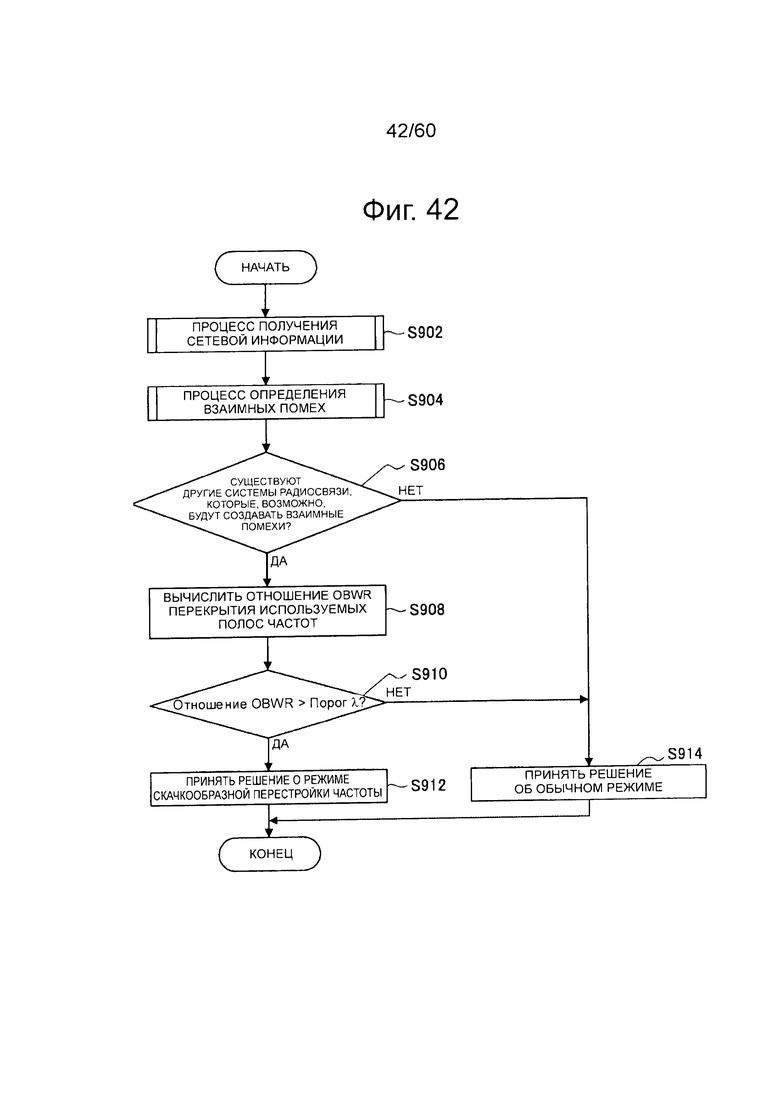
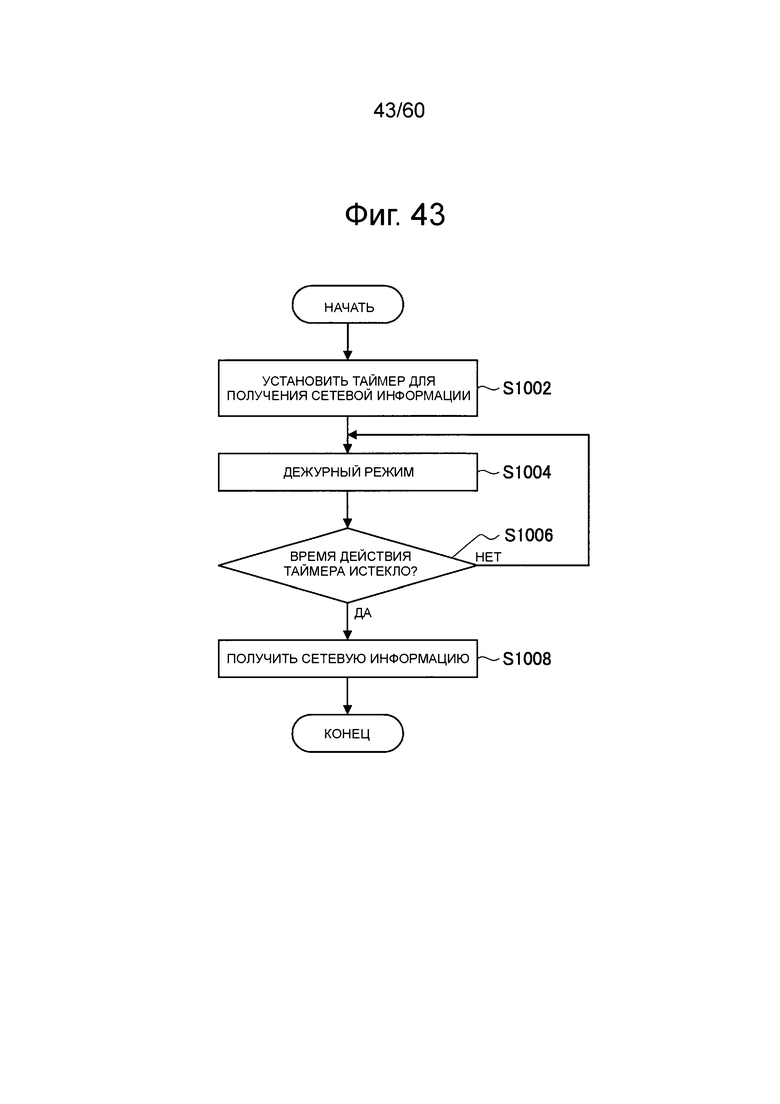
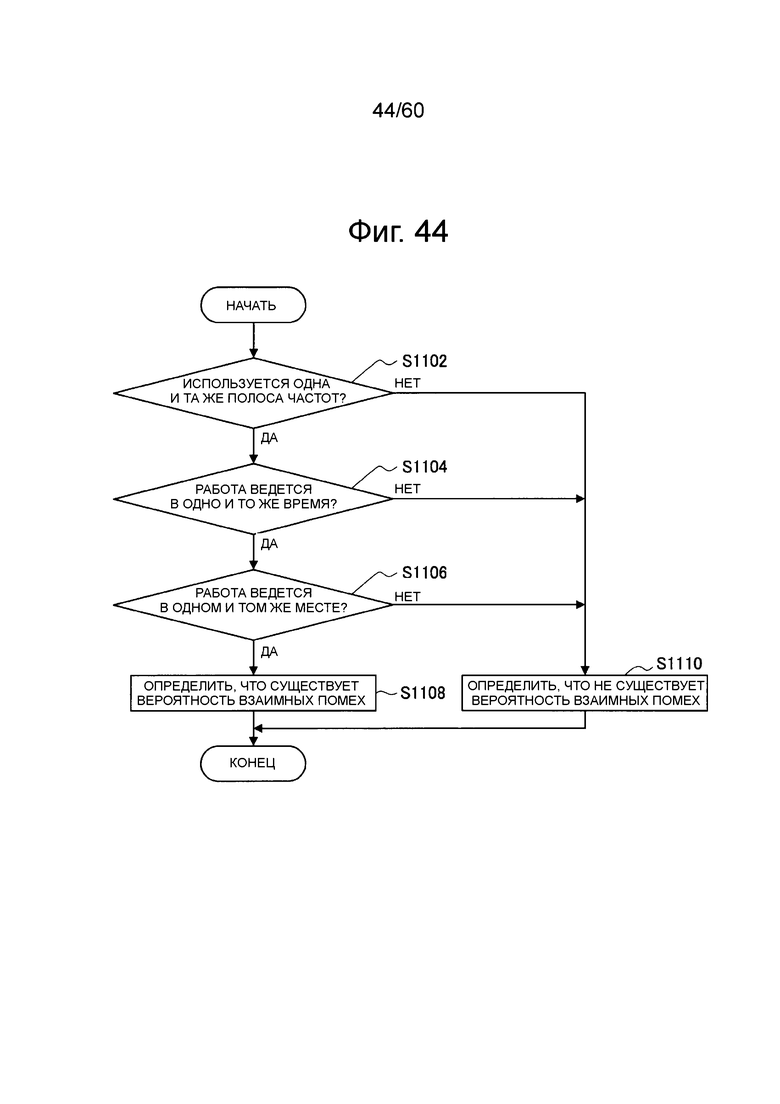
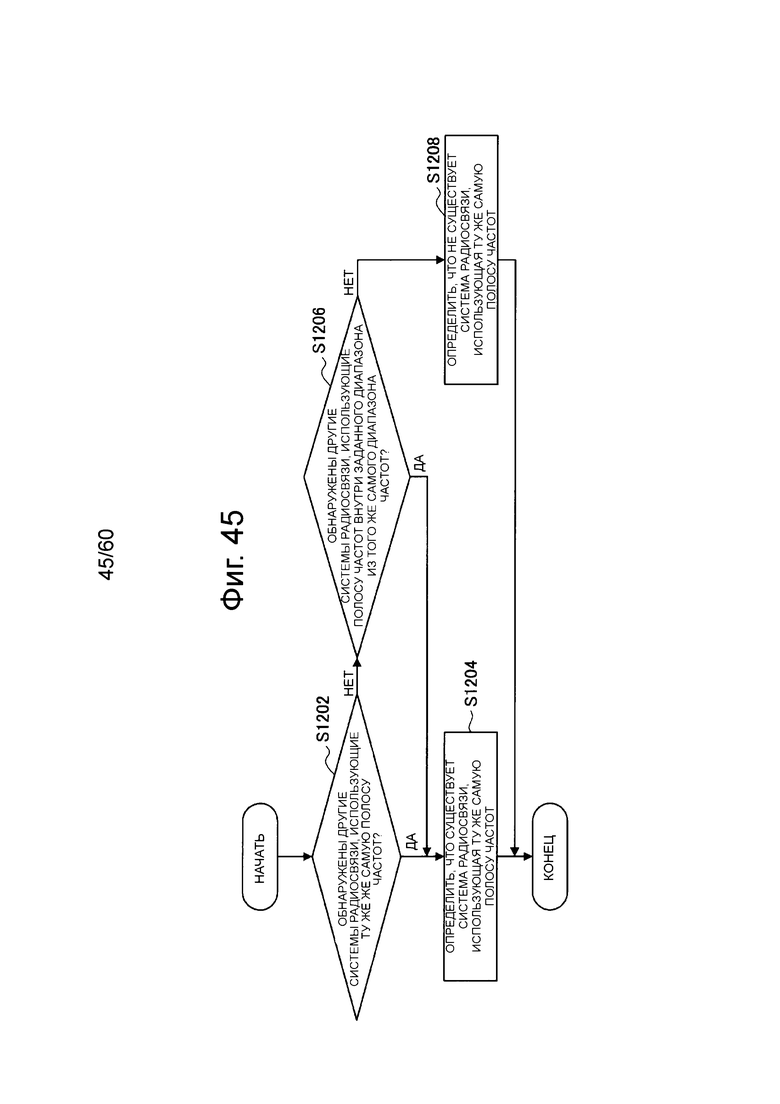
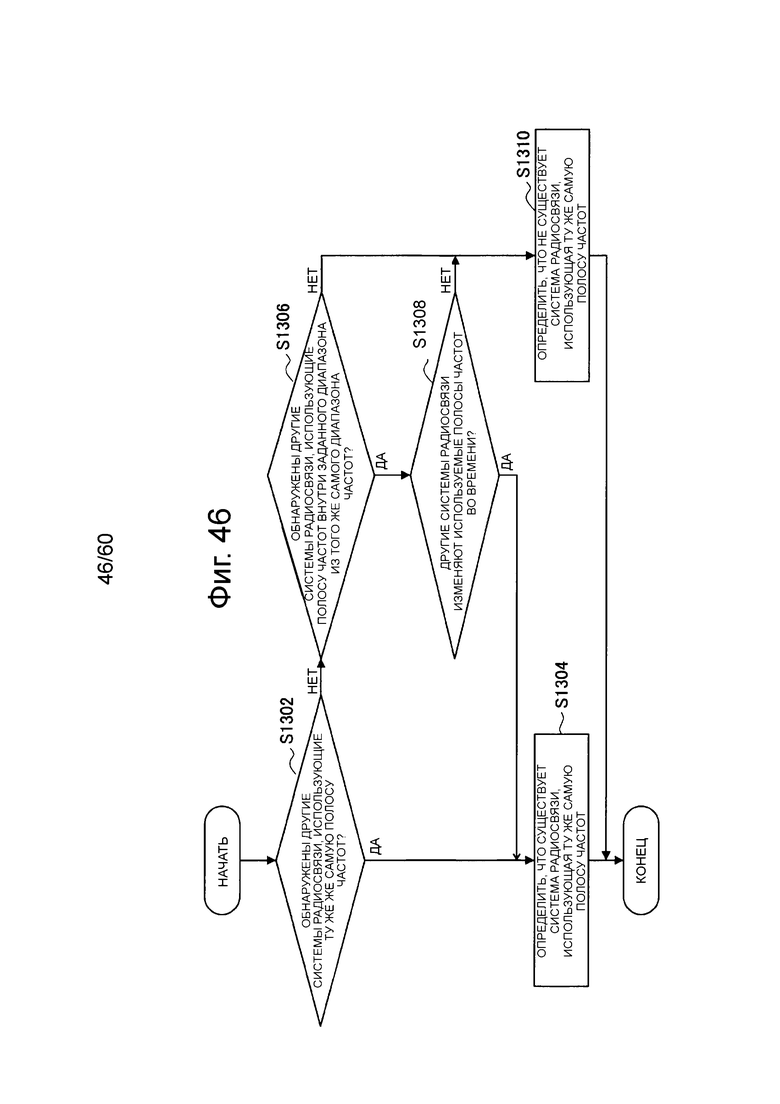
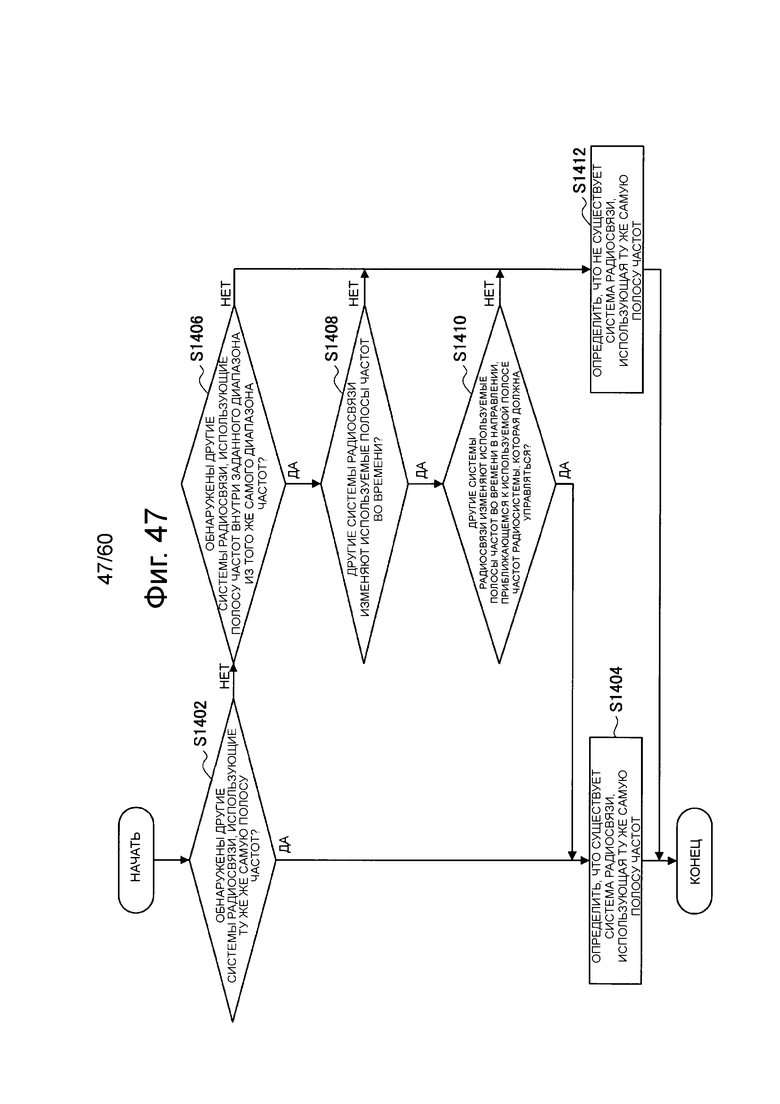
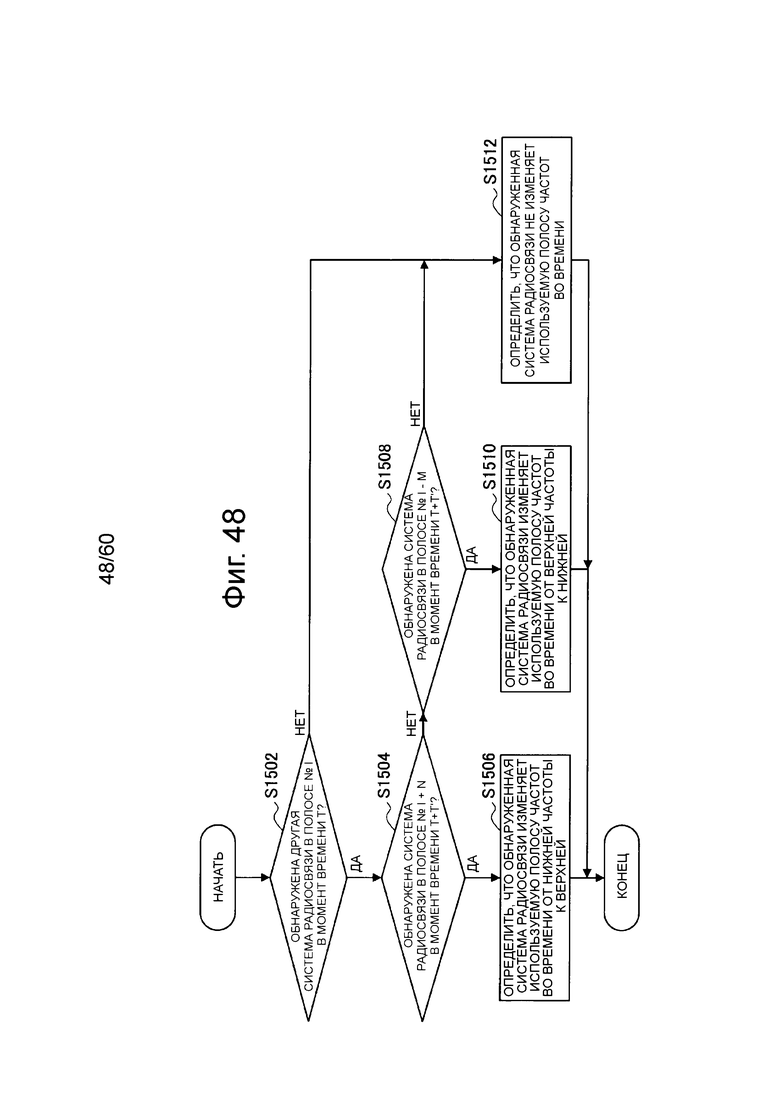
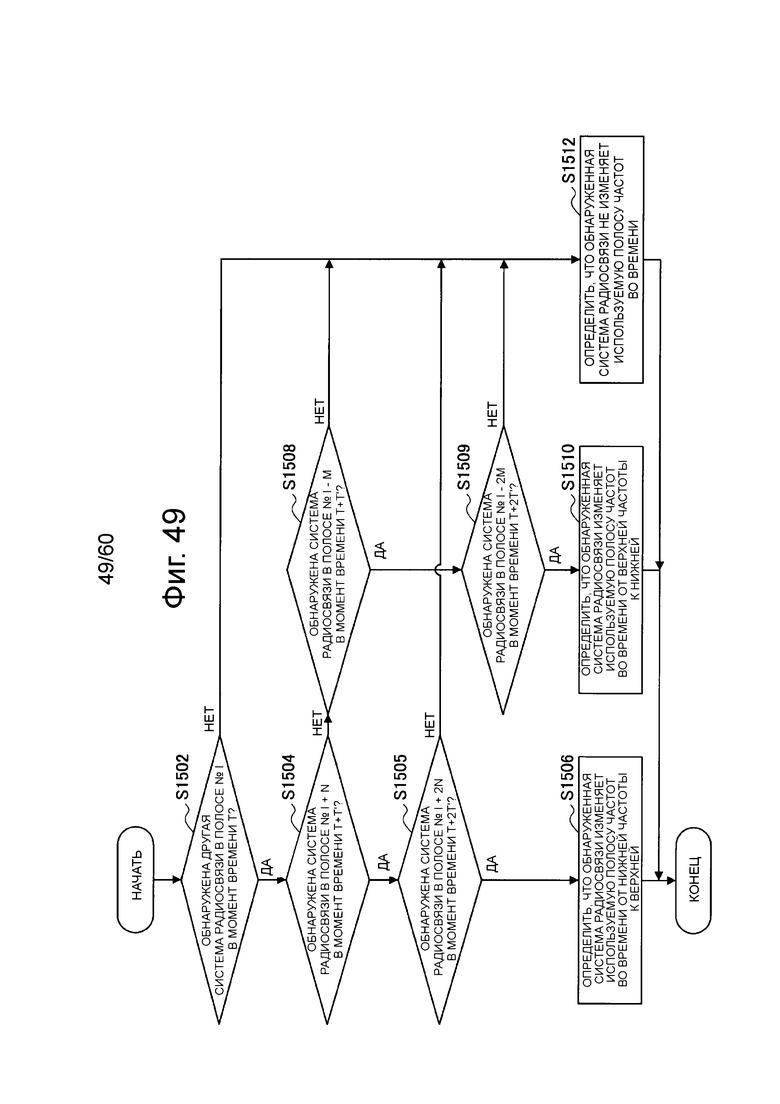
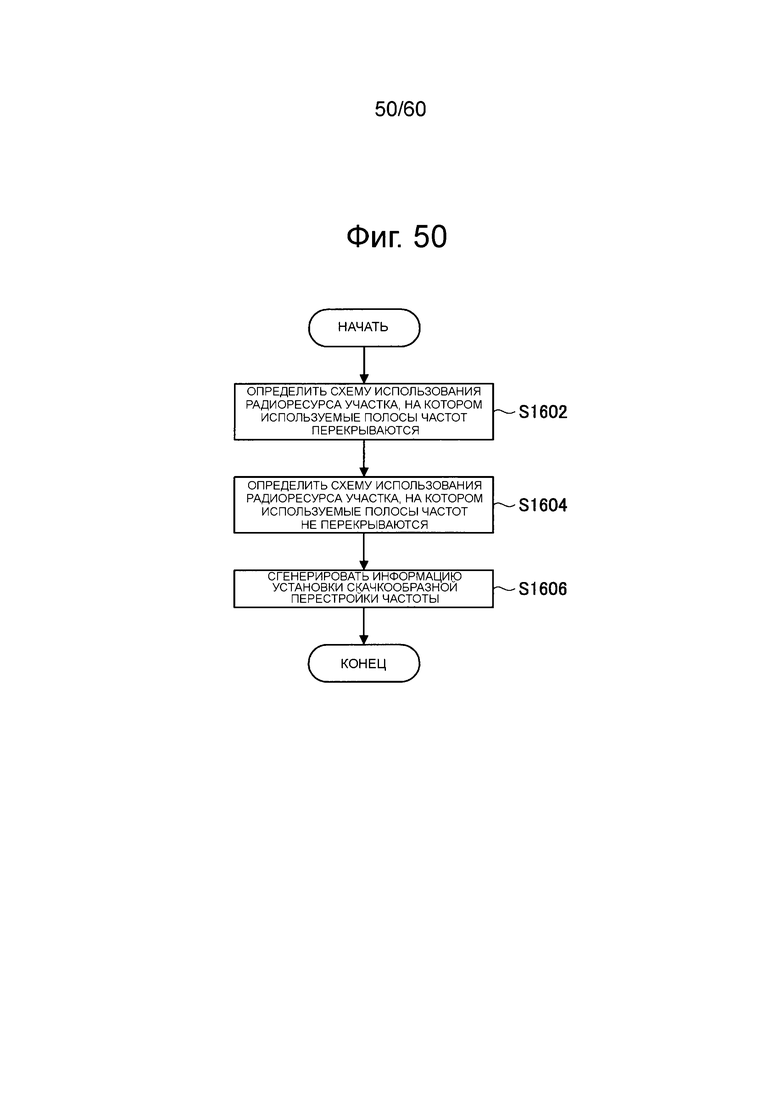
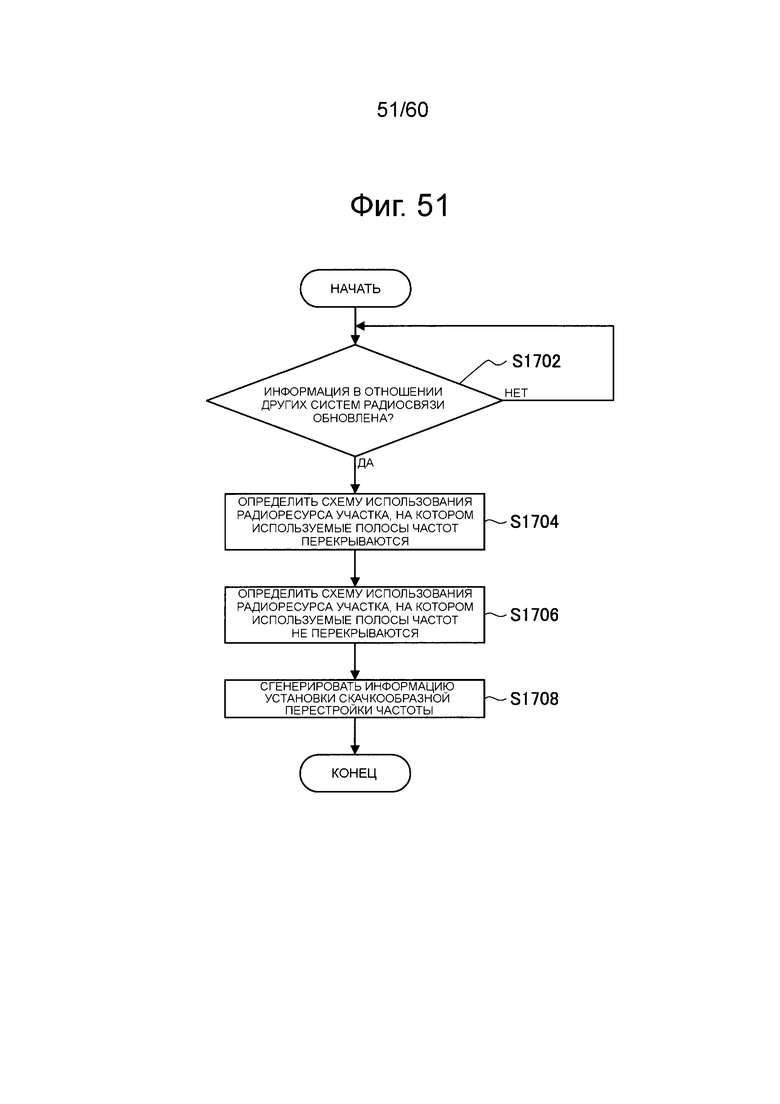
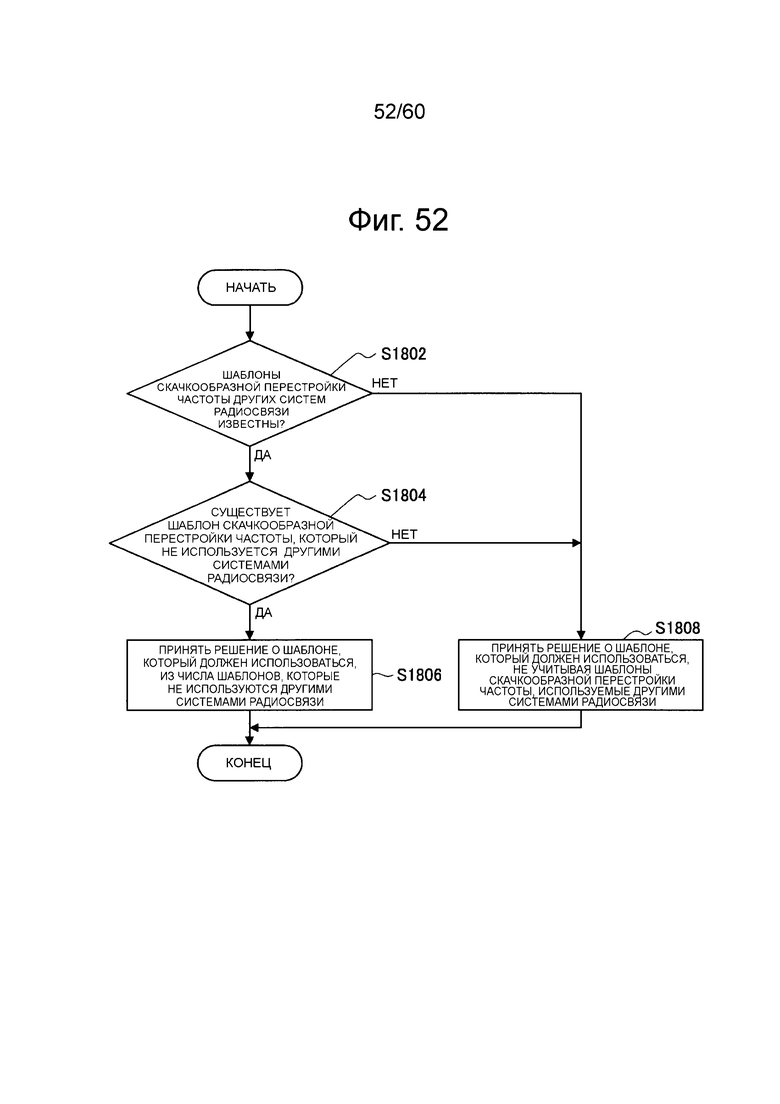
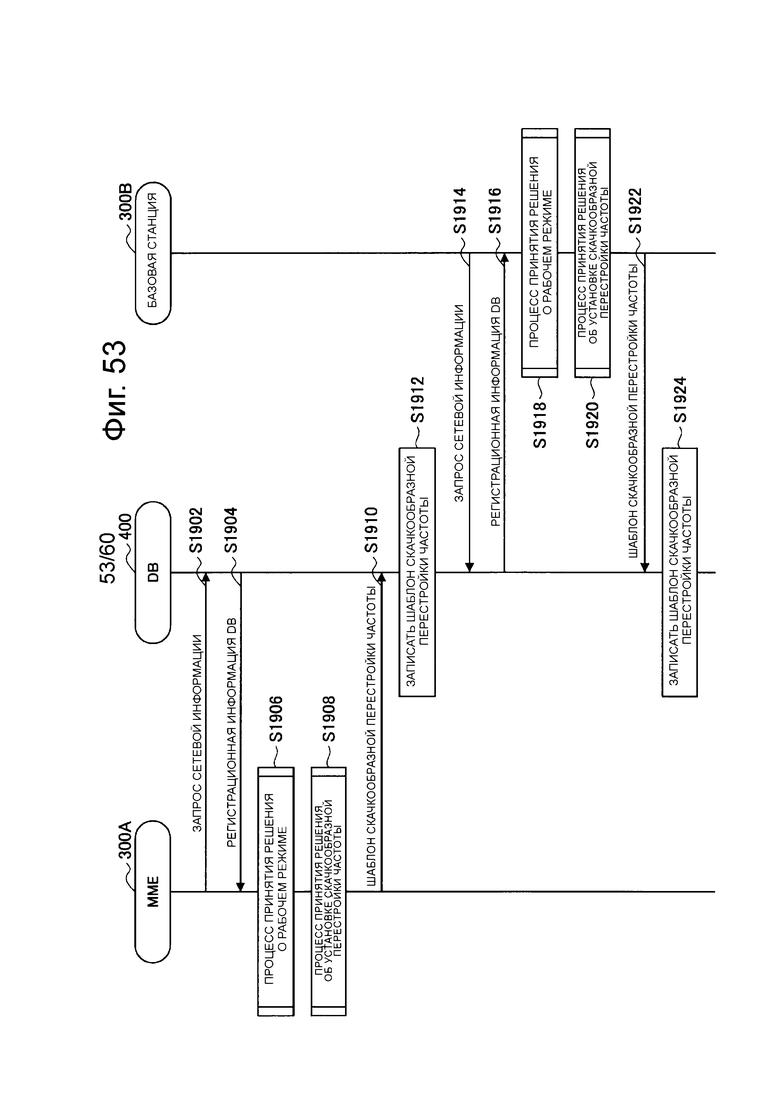
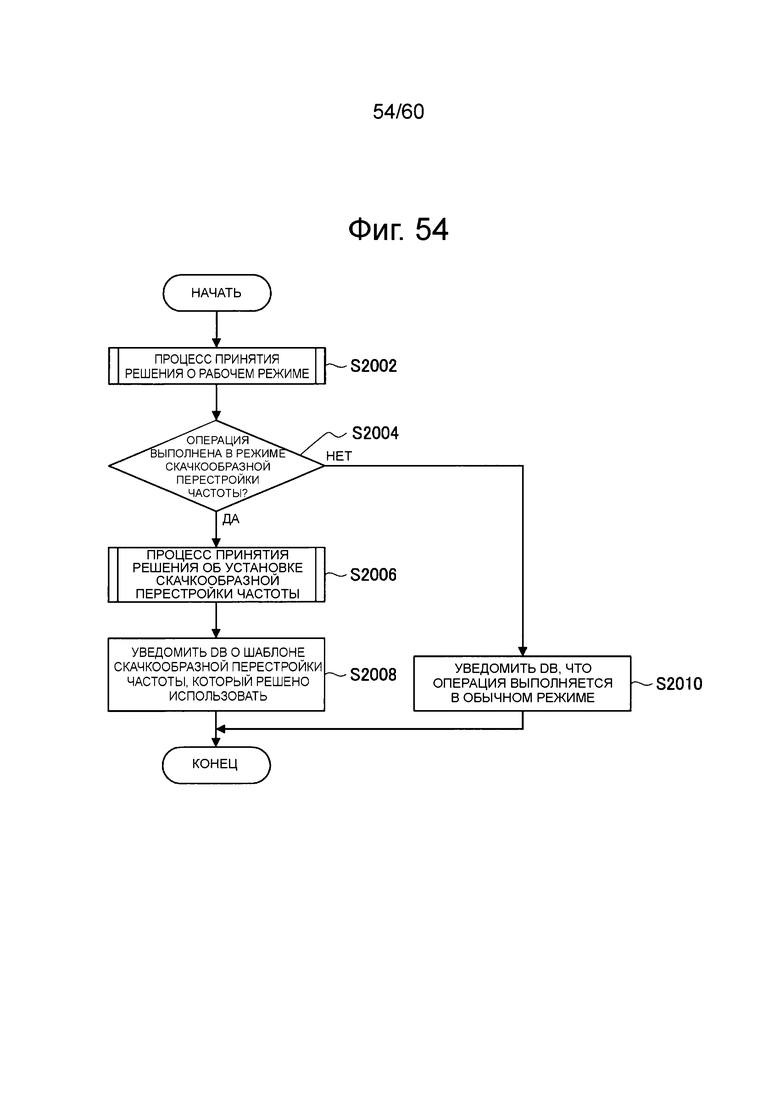
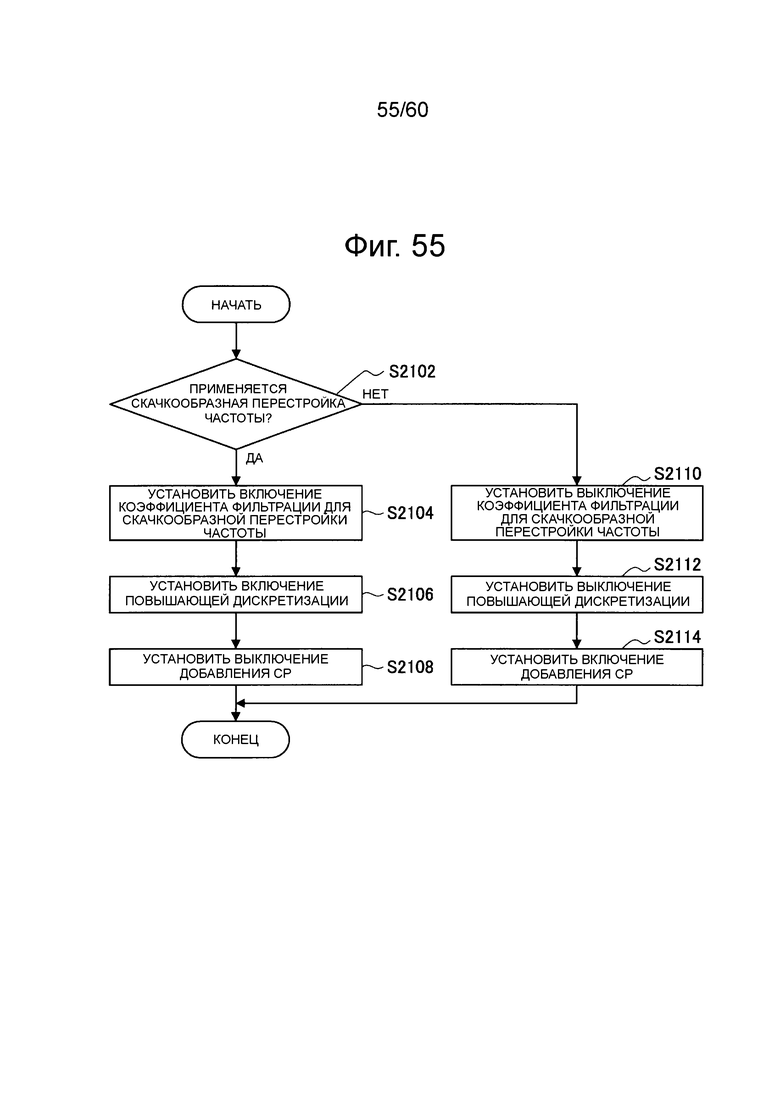
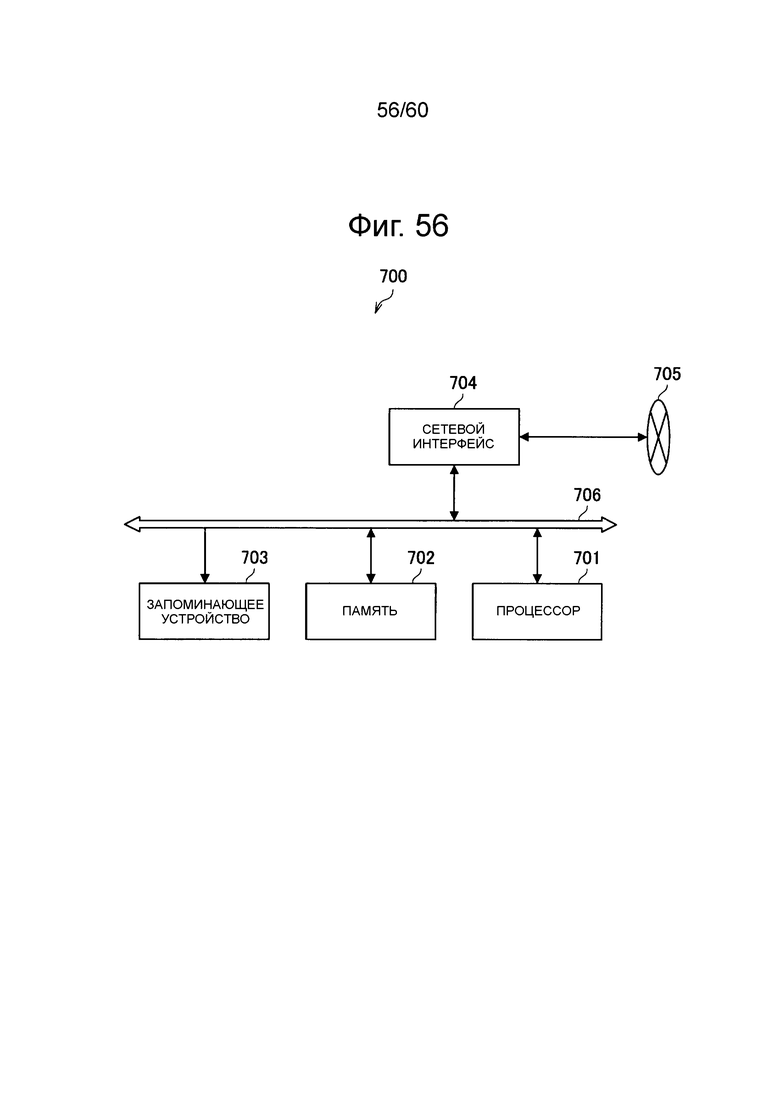
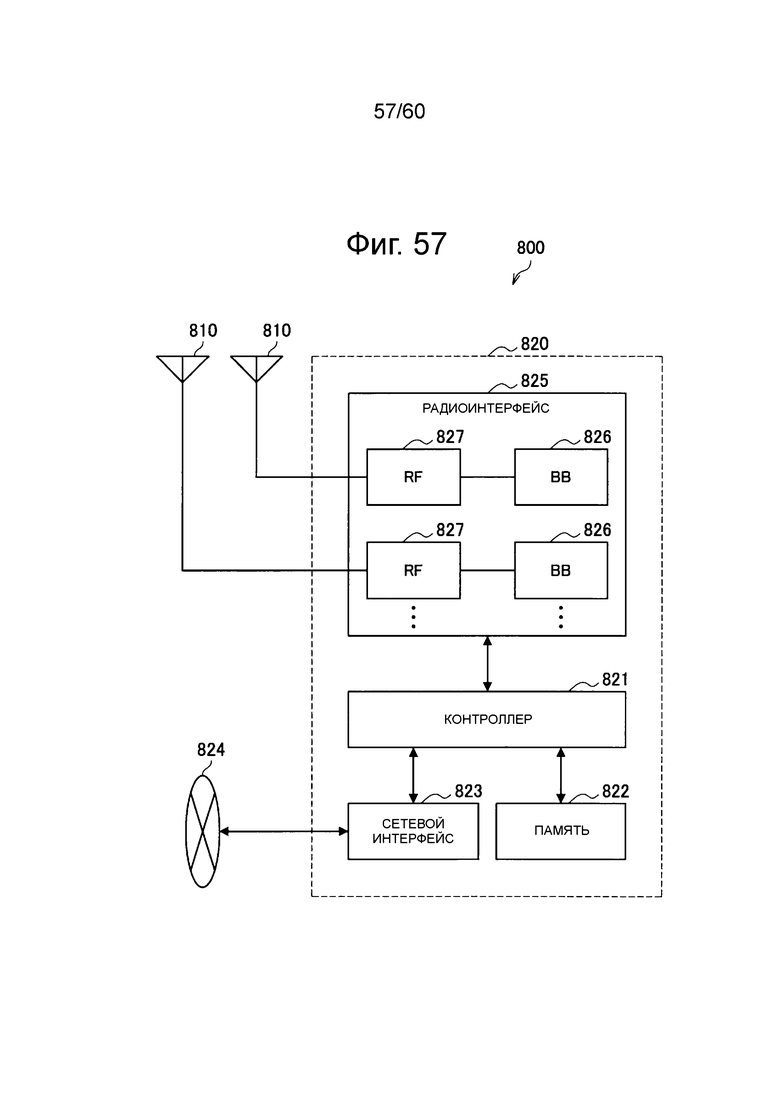
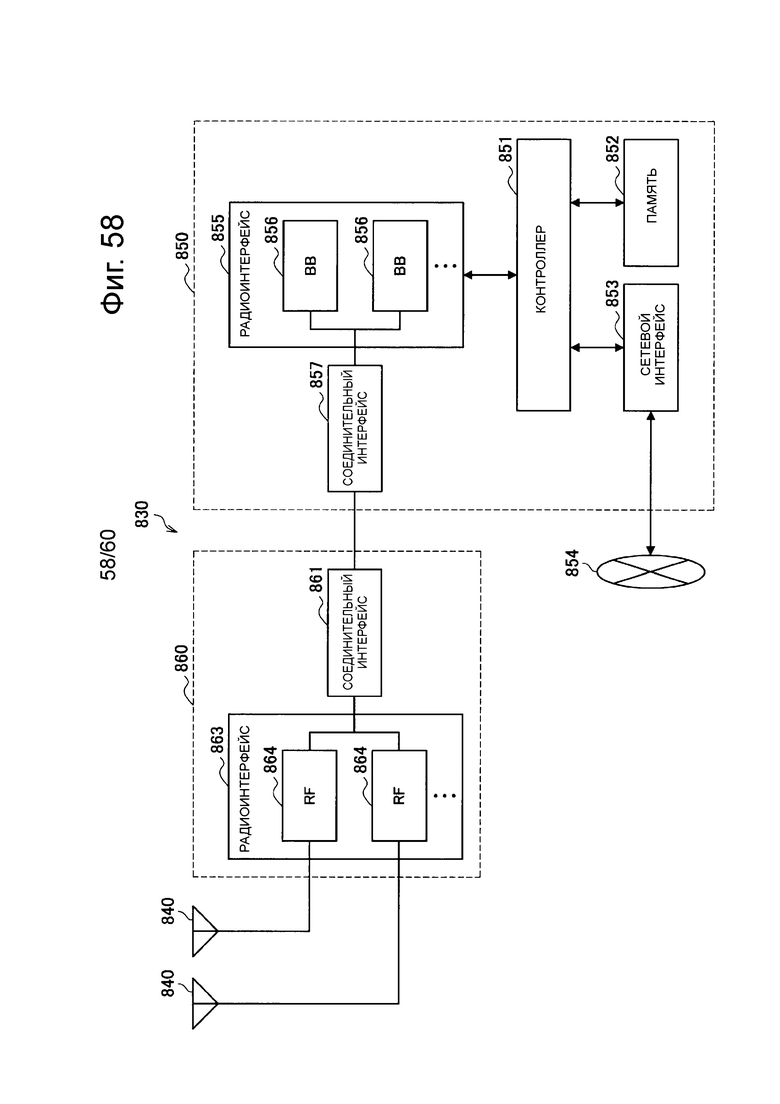
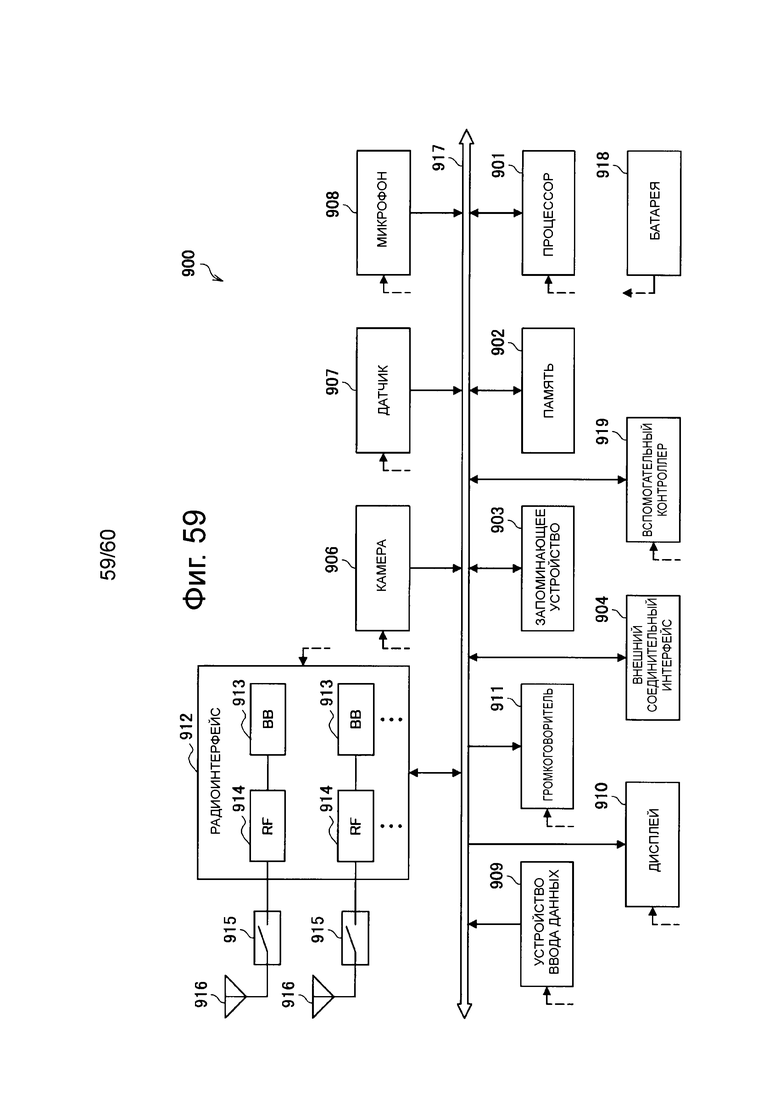
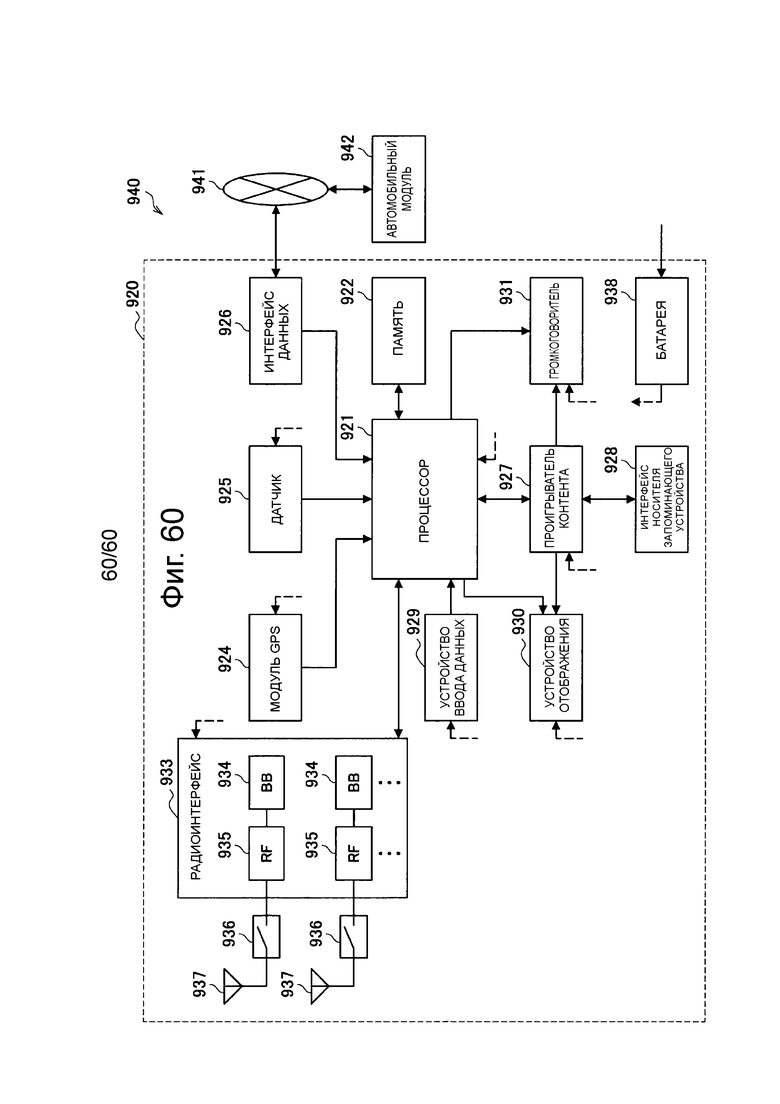
Изобретение относится к технике связи и может использоваться в устройствах управления связью. Технический результат состоит в уменьшении взаимных помех, вызванных в среде различных систем радиосвязи, путем обеспечения управления связью. Для этого устройство управления связью содержит блок связи, выполненный с возможностью осуществления связи с устройством, принадлежащим к первой радиосети; блок управления, выполненный с возможностью управления тем, выполняет ли устройство радиосвязи, принадлежащее к первой радиосети, скачкообразную перестройку частоты, на основе информации второй радиосети, отличающейся от первой радиосети. 3 н. и 29 з.п. ф-лы, 60 ил., 11 табл.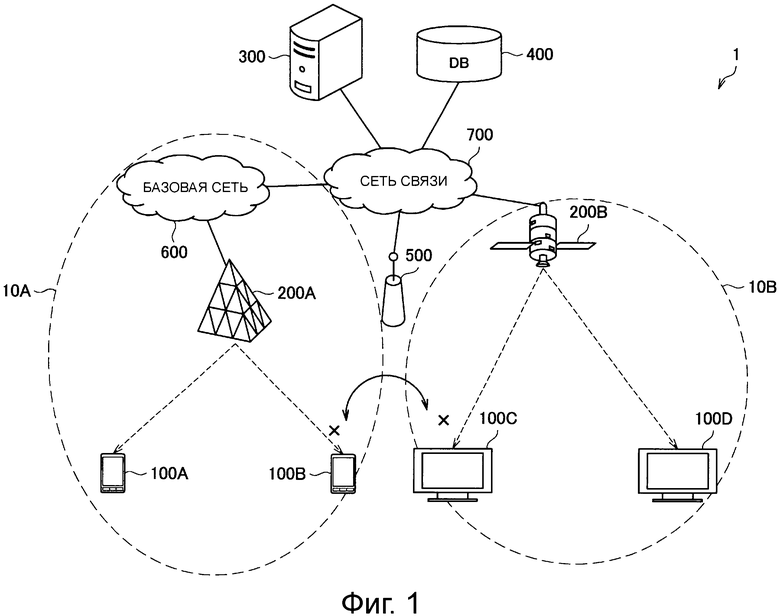
1. Устройство (300) управления связью, содержащее:
блок (310) связи, выполненный с возможностью связи с устройством, принадлежащим к первой радиосети; и
блок (320) управления, выполненный с возможностью управления, выполнять ли устройству радиосвязи, принадлежащему к первой радиосети, скачкообразную перестройку частоты, на основе информации сети второй радиосети, отличающейся от первой радиосети; при этом
блок (320) управления выполнен с возможностью получения информации сети посредством блока (310) связи и принятия решения, что скачкообразная перестройка частоты выполняется в полосе частот, перекрывающейся с полосой частот, используемой второй радиосетью.
2. Устройство (300) управления связью по п. 1, в котором блок (310) управления выполнен с возможностью управления, выполнять ли скачкообразную перестройку частоты, на основе приоритета второй радиосети.
3. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью принятия решения о шаблоне скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой устройством радиосвязи, принадлежащим к первой радиосети.
4. Устройство (300) управления связью по п. 3, в котором блок (320) управления выполнен с возможностью принятия решения о шаблоне скачкообразной перестройки, отличающемся от шаблона скачкообразной перестройки для скачкообразной перестройки частоты, выполняемой второй радиосетью.
5. Устройство (300) управления связью по п. 3 или 4, в котором скачкообразная перестройка в направлении частоты определена в шаблоне скачкообразной перестройки в любом блоке по меньшей мере из блока поднесущей, ресурсного блока или блока компонентной несущей.
6. Устройство (300) управления связью по любому из пп. 3-5, в котором скачкообразная перестройка в направлении времени определяется в шаблоне скачкообразной перестройки в любом блоке по меньшей мере из блока символов, блока слота или блока субкадра.
7. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью управления, выполнять ли скачкообразную перестройку частоты, на основе вероятности содания помех первой радиосети для второй радиосети.
8. Устройство (300) управления связью по п. 7, в котором блок (320) управления выполнен с возможностью определения, существует ли вероятность создания помех, когда существует вероятность, что полоса частот, используемая первой радиосетью по меньшей мере частично, перекрывается с полосой частот, используемой второй радиосетью.
9. Устройство (300) управления связью по п. 8, в котором блок (320) управления выполнен с возможностью определения, на основе информации второй радиосети, изменяет ли вторая радиосеть используемую полосу частот в течение времени.
10. Устройство (300) управления связью по п. 9, в котором блок (320) управления выполнен с возможностью определения существования вероятности перекрытия, когда вторая радиосеть изменяет используемую полосу частот в течение времени.
11. Устройство (300) управления связью по п. 10, в котором блок (320) управления выполнен с возможностью определения существования вероятности перекрытия, когда направление, в котором вторая радиосеть изменяет используемую полосу частот в течение времени, является направлением приближения к полосе частот, используемой первой радиосетью.
12. Устройство (300) управления связью по п. 10, в котором блок (320) управления выполнен с возможностью определения отсутствия вероятности перекрытия, когда направление, в котором вторая радиосеть изменяет используемую полосу частот в течение времени, является направлением удаления от полосы частот, используемой первой радиосетью.
13. Устройство (300) управления связью по п. 8, в котором блок (320) управления выполнен с возможностью определения существования вероятности взаимных помех, когда местоположение действия первой радиосети по меньшей мере частично перекрывается местоположением действия второй радиосети.
14. Устройство (300) управления связью по п. 8, в котором блок (320) управления выполнен с возможностью определения существования вероятности взаимных помех, когда рабочий временной слот первой радиосети по меньшей мере частично перекрывается рабочим временным слотом второй радиосети.
15. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью управления, выполнять ли скачкообразную перестройку частоты, на основе отношения перекрытия между полосой частот, используемой первой радиосетью, и полосой частот, используемой второй радиосетью.
16. Устройство (300) управления связью по п. 1, в котором блок (310) связи выполнен с возможностью получения информации второй радиосети от запоминающего устройства.
17. Устройство (300) управления связью по п. 1, в котором блок (310) связи выполнен с возможностью получения информации второй радиосети от устройства датчика.
18. Устройство (300) управления связью по п. 1, в котором информация второй радиосети содержит информацию, указывающую приоритет второй радиосети.
19. Устройство (300) управления связью по п. 1, в котором информация второй радиосети содержит информацию, относящуюся к полосе частот, используемой второй радиосетью.
20. Устройство (300) управления связью по п. 1, в котором информация второй радиосети содержит информацию, относящуюся к местоположению, в котором действует вторая радиосеть.
21. Устройство (300) управления связью по п. 1, в котором информация второй радиосети содержит информацию, относящуюся к временному слоту, в котором действует вторая радиосеть.
22. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью управления устройством радиосвязи, принадлежащим к первой радиосети, для передачи данных, одновременно со скачкообразной перестройкой частоты.
23. Устройство (300) управления связью по п. 22, в котором блок (320) управления выполнен с возможностью управления для передачи информации, относящейся к скачкообразной перестройке частоты, выполняемой устройством радиосвязи, принадлежащим к первой радиосети, другим устройствам радиосвязи, принадлежащим к первой радиосети.
24. Устройство (300) управления связью по п. 23, в котором информация, относящаяся к скачкообразной перестройке частоты, передается устройством радиосвязи, принадлежащим к первой радиосети.
25. Устройство (300) управления связью по п. 23, в котором информация, относящаяся к скачкообразной перестройке частоты, одноадресно передается устройством радиосвязи, принадлежащим к первой радиосети.
26. Устройство (300) управления связью по п. 23, в котором информация, относящаяся к скачкообразной перестройке частоты, передается устройством радиосвязи, принадлежащим к первой радиосети, с использованием канала управления для каждой линии связи.
27. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью управления другими устройствами радиосвязи, принадлежащими к первой радиосети, для приема данных, передаваемых устройством радиосвязи, принадлежащим к первой радиосети, в то время как скачкообразная перестройка частоты выполняется, на основе информации, относящейся к скачкообразной перестройке частоты.
28. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью управления запоминающим устройством, для сохранения информации второй радиосети.
29. Устройство (300) управления связью по п. 1, в котором блок (320) управления выполнен с возможностью управления устройством датчика, выполненным с возможностью обнаружения информации второй радиосети, для обнаружения полосы частот, более широкой, чем полоса частот, используемая первой радиосетью.
30. Устройство (300) управления связью по п. 29, в котором блок (320) управления выполнен с возможностью управления устройством датчика, для разделения полосы частот на множество полос и обнаружения полосы.
31. Способ управления связью, содержащий этапы, на которых:
осуществляют связь с помощью блока (310) связи с устройством, принадлежащим к первой радиосети;
управляют с помощью блока (320) управления тем, выполняет ли устройство радиосвязи, принадлежащее к первой радиосети, скачкообразную перестройку частоты, на основе информации сети второй радиосети, отличающейся от первой радиосети;
получают с помощью блока (320) управления информацию сети посредством блока (310) связи; и
принимают решение с помощью блока (320) управления, что скачкообразная перестройка частоты выполняется в полосе частот, перекрывающейся с полосой частот, используемой второй радиосетью.
32. Носитель записи, хранящий программу, вызывающую функционирование компьютера в качестве:
блока (310) связи, выполненного с возможностью связи с устройством, принадлежащим к первой радиосети; и
блока (320) управления, выполненного с возможностью управления тем, выполняет ли устройство радиосвязи, принадлежащее к первой радиосети, скачкообразную перестройку частоты, на основе информации второй радиосети, отличающейся от первой радиосети; при этом
блок (320) управления выполнен с возможностью получения информации сети посредством блока (310) связи и принятия решения, что скачкообразная перестройка частоты выполняется в полосе частот, перекрывающейся с полосой частот, используемой второй радиосетью.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧАМИ В СИСТЕМЕ СВЯЗИ | 2001 |
|
RU2264036C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАТЧИКОМ ОДНОВРЕМЕННОЙ ПЕРЕДАЧИ (ВАРИАНТЫ) | 1997 |
|
RU2118057C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

