ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Это изобретение относится в общем к способам и устройствам управления силовым агрегатом транспортного средства на основании доступной тормозной способности, получаемой из прогнозируемого снижения эффективности торможения.
УРОВЕНЬ ТЕХНИКИ
[0002] Многие транспортные средства оборудованы автоматическими тормозными системами, которые используют трение между диском и тормозной накладкой, когда тормозная накладка находится на тормозной колодке, или трение между барабаном и тормозной накладкой, когда тормозная накладка находится на тормозной колодке. Одной из характеристик фрикционных тормозов является снижение производительности тормозной системы транспортного средства или снижение эффективности торможения. Снижение эффективности торможения представляет собой уменьшение мощности торможения, которое может возникать после повторного или длительного применения фрикционного тормоза. Снижение эффективности торможения вызывается накоплением тепла во фрикционном материале тормозов, включая тормозную накладку, тормозной диск, тормозной барабан или тормозную жидкость. Потеря мощности торможения или снижение эффективности может быть вызвано снижением эффективности торможения при снижении трения или снижением эффективности торможения при перегреве текучей среды. Снижение эффективности торможения часто происходит во время движения по длинному крутому уклону. Дисковые тормоза более устойчивы к снижению эффективности торможения, так как тепло может быть отведено от диска и накладок, тогда как барабаны имеют тенденцию удерживать тепло.
[0003] Также многие транспортные средства оборудованы системой адаптивного круиз-контроля (ACC). Система ACC, работающая с традиционным управлением скоростью на основе двигателя, может автоматически применять фрикционные тормоза транспортного средства для поддержания постоянной скорости или дистанции следования. Система ACC транспортного средства, движущегося вниз по холму или следующего за другим транспортным средством, может активно замедлять транспортное средство, уменьшая выходную мощность двигателя или применяя тормоза транспортного средства для поддержания скорости транспортного средства или расстояния между транспортным средством и другим транспортным средством. Постоянное применение фрикционного тормоза, например, во время режима следования по спуску, может перегрузить фрикционные тормоза и привести к снижению эффективности торможения. Для того чтобы избегать снижения эффективности торможения, некоторые системы ACC выполнены с возможностью отключения, когда фрикционные тормоза превышают определенную температуру.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] Система круиз-контроля для транспортного средства включает в себя контроллер. Контроллер выполнен с возможностью поддержания скорости транспортного средства около заданного значения и уменьшения заданного значения в ответ на падение прогнозируемой тормозной способности ниже порогового значения на основании прогнозируемого снижения эффективности торможения, и выполнения переключения на более низкую передачу коробки передач транспортного средства для увеличения отрицательного крутящего момента, чтобы уменьшить снижение эффективности торможения.
[0005] Силовой агрегат транспортного средства включает в себя двигатель, автоматическую коробку передач, соединенную с двигателем, и контроллер. Контроллер выполнен с возможностью поддержания скорости транспортного средства около заданного значения и уменьшения заданного значения в ответ на падение прогнозируемой тормозной способности ниже порогового значения на основании прогнозируемого снижения эффективности торможения, и выполнения переключения на более низкую передачу для увеличения отрицательного крутящего момента.
[0006] Способ управления силовым агрегатом транспортного средства включает в себя этапы, на которых в ответ на уменьшение прогнозируемой способности тормозов транспортного средства ниже заданного уровня уменьшают с помощью контроллера заданное значение скорости транспортного средства, применяют фрикционные тормоза транспортного средства для уменьшения скорости транспортного средства до заданного значения и выполняют понижение передачи, причем прогнозируемая способность основана на температуре, связанной с фрикционным материалом тормозов транспортного средства, и на пороговом значении прогнозируемого снижения эффективности торможения, получаемого из скорости, массы и текущего угла наклона транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 иллюстрирует вычислительную систему транспортного средства, включающую в себя настраиваемый дисплей для облегчения передачи информации водителю.
[0008] Фиг. 2 иллюстрирует схематическое изображение силового агрегата транспортного средства и систем управления для силового агрегата.
[0009] Фиг. 3 иллюстрирует графическое изображение мощности тормоза двигателя по отношению к частоте вращения двигателя на коленчатом валу двигателя.
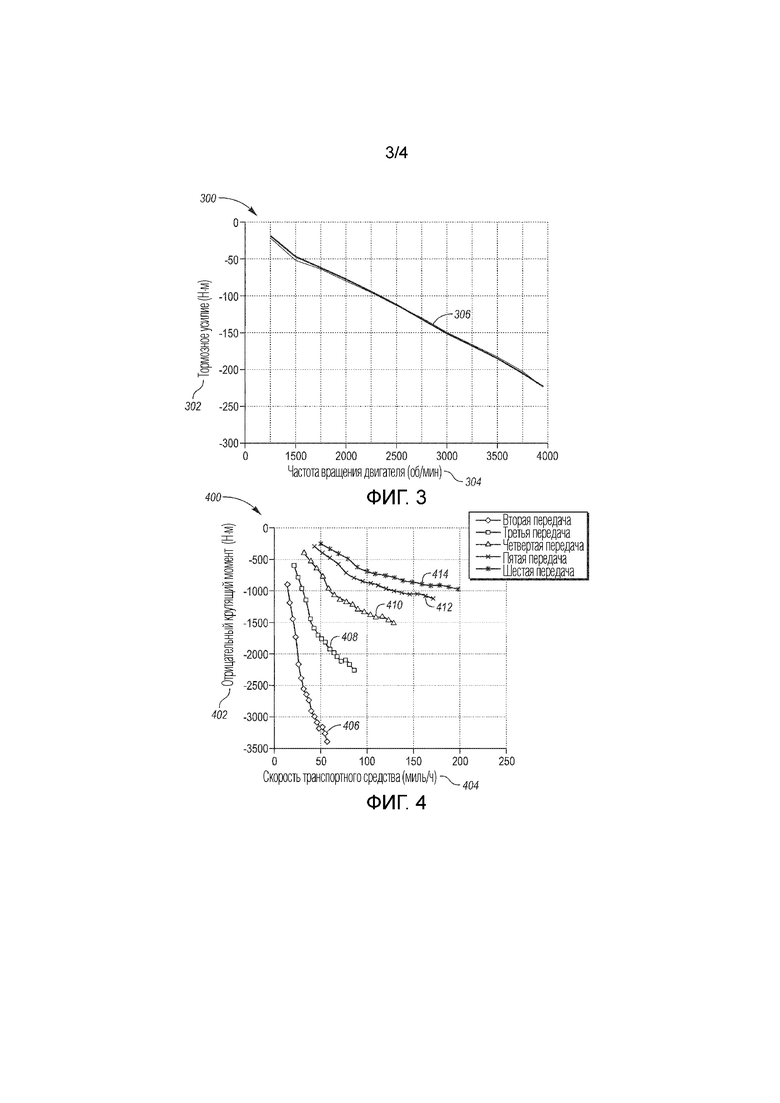
[0010] Фиг. 4 иллюстрирует отрицательный крутящий момент на колесе по отношению к скорости транспортного средства для различных передач.
[0011] Фиг. 5 иллюстрирует блок-схему системы управления для изменения заданного значения системы круиз-контроля на основе прогнозируемого снижения эффективности торможения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0012] В настоящем документе описаны варианты выполнения настоящего изобретения. Однако следует понимать, что раскрытые варианты выполнения являются лишь примерами, и другие варианты выполнения могут принимать различные и альтернативные формы. Чертежи не обязательно выполнены в масштабе; определенные признаки могут быть увеличены или минимизированы, чтобы показать детали конкретных компонентов. В связи с этим конкретные конструктивные и функциональные детали, раскрытые в настоящем документе, не должны интерпретироваться как ограничивающие, а лишь как представляющие основу для информирования специалиста в данной области техники о различных способах применения настоящего изобретения. Для специалиста в области техники будет понятно, что различные признаки, проиллюстрированные и описанные со ссылкой на любой из чертежей, могут быть объединены с признаками, проиллюстрированными на одном или более других чертежах для получения вариантов выполнения, которые не точно проиллюстрированы или описаны. Совокупности проиллюстрированных признаков обеспечивают типичные варианты выполнения для типичных применений. Однако различные совокупности и преобразования признаков, соответствующие замыслам этого раскрытия, могут потребоваться для конкретных применений или вариантов выполнения.
[0013] Основной принцип работы тормозов является одинаковым для большинства транспортных средств. Это принцип представляет собой сохранение энергии, который заключается в том, что энергия не создается и не исчезает, а только преобразуется из одной формы в другую. Фрикционные тормоза представляют собой преобразователи энергии; они преобразуют кинетическую энергию (например, движение) в тепловую энергию посредством трения либо между тормозной накладкой и поверхностью тормозного барабана, либо между тормозной накладкой и поверхностью тормозного диска. Фрикционная поверхность представляет собой поверхность вращающегося тормозного компонента (например, тормозного барабана или тормозного диска), взаимодействующую с тормозной колодкой (например, тормозной накладкой). Количество тепла, производимого тормозной системой, непосредственно связано с массой транспортного средства и силой, прикладываемой тормозной колодкой к вращающемуся тормозному компоненту. Тепловая энергия обычно измеряется в британских тепловых единицах (BTU), и величина BTU, производимая тормозной системой, является результатом величины преобразуемой кинетической энергии. Кинетическая энергия=½ m • V², где m - масса, а V - скорость. Количество энергии, которое тормоз должен преобразовывать в тепло, удваивается при удваивании массы транспортного средства и увеличивается в четыре раза при удваивании его скорости.
[0014] В настоящем документе изучаются два рабочих режима по отношению к снижению эффективности торможения вследствие теплового насыщения, обычной операции вождения и адаптивного круиз-контроля. Когда происходит событие вождения, при котором происходит насыщение теплоемкости тормозов, часто тормоза больше не способны обеспечивать эффективное тормозное усилие. Во время движения под уклон при нормальной эксплуатации у водителя имеется пара вариантов, если он или она желает поддерживать постоянную скорость. Водитель может использовать ручное управление и принудительно переключать трансмиссию на более низкую передачу. Более низкая передача будет обеспечивать лучшее торможение двигателем вследствие увеличенного числа оборотов в минуту. Если транспортное средство оборудовано тормозом двигателя, эффект будет даже больше. Водитель также может делать выбор, чтобы регулировать его или ее скорость, используя фрикционные тормоза. Наилучшей практикой является прокачивание тормозов или подтормаживание, позволяющее значительно снизить скорость без перегрева тормозов. Нет ничего, что заставляет водителя делать это, и обычный режим работы трансмиссии не будет вызывать каких-либо переключений на более низкую передачу. Водитель может также переводить транспортное средство в режим «буксировки/движения с нагрузкой», который позволяет переключения на более низкую передачу при торможении на спуске. Логика переключений на более низкую передачу основана на скорости нажатия педали тормоза и достигаемом тормозном давлении. Если водитель подтормаживал, то переключение на более низкую передачу, вероятно, будет выполнено. Если водитель поддерживает высокое тормозное давление, происходит несколько переключений на более низкую передачу.
[0015] Однако ни один из вышеупомянутых способов управления скоростью не может полностью защитить водителя от насыщения теплоемкости тормозов. Даже в режиме буксировки/движения с нагрузкой водитель все же способен применять легкое тормозное давление для поддержания скорости, в то же время не вызывая переключение трансмиссии на более низкую передачу. Используя модель теплоемкости, логика трансмиссии может быть разработана, чтобы вызывать переключение трансмиссии на более низкую передачу, когда транспортное средство приближается к пределу теплоемкости. Переключение на более низкую передачу позволяет силовому агрегату обеспечивать часть тормозного усилия, требуемого водителем.
[0016] Когда адаптивный круиз-контроль активен, транспортное средство применяет фрикционные тормоза автоматически, и переключения на более низкую передачу определяются с использованием другой логики. С активным адаптивным круиз-контролем логика трансмиссии использует счетчик торможений, который основан на тормозном давлении и времени. При более высоких тормозных давлениях счетчик считает быстрее, чем при более низком тормозном давлении. Точный график определяется калибратором трансмиссии. Как только счетчик достигает определенного предела, установленного инженером по калибровке, трансмиссия переключается на более низкую передачу. Это один из способов смягчения требований к гидравлическому тормозу. Однако этот способ не учитывает фактическую теплоемкость тормозной системы. То, как система должна функционировать, основано на удовлетворенности потребителей и решении инженеров транспортного средства.
[0017] В режиме адаптивного круиз-контроля логика переключений на более низкую передачу с учетом теплоемкости может быть дополнительной гарантией, которая заменяет существующую логику переключений на более низкую передачу. Снова, используя модель теплоемкости, логика трансмиссии может импортировать значение модели в модуль управления трансмиссией (TCM), и в логике трансмиссии может быть установлен предел. Когда теплоемкость достигает этого предела, может быть запрошено переключение на более низкую передачу.
[0018] К тому же, может быть целесообразным включение сигнала прогнозируемой теплоемкости. Этот сигнал может использовать текущую теплоемкость и текущую скорость изменения теплоемкости. Используя оба этих сигнала, TCM может прогнозировать точку теплового насыщения и в связи с этим прогнозируемую точку переключения на более низкую передачу.
[0019] Как для ситуации обычной операции вождения, так и для ситуации вождения с адаптивным круиз-контролем эта логика может перезаписывать все другие алгоритмы переключений на более низкую передачу.
[0020] В дополнение, эта логика может быть расширена, например, во время вождения с адаптивным круиз-контролем если скорость транспортного средства устанавливается таким образом, что переключение на более низкую передачу невозможно при текущей передаче, система может подтормаживать транспортное средство до более низкой скорости, когда переключение на более низкую передачу возможно.
[0021] В некоторых случаях одного переключения на более низкую передачу может быть недостаточно, чтобы смягчить требования к фрикционному тормозу, также называемые требованиями к гидравлическому тормозу. Как только переключение на более низкую передачу происходит, логика может снова оценивать скорость изменения теплоемкости. Если она продолжает увеличиваться после переключения на более низкую передачу, система может быть настроена, чтобы отдавать команду для другого переключения на более низкую передачу. Система может продолжать делать это до тех пор, пока скорость изменения теплоемкости не станет отрицательной.
[0022] В общем снижение эффективности торможения может быть разбито на четыре основные категории, включающие в себя: снижение эффективности торможения при снижении трения, механическое снижение эффективности торможения, снижение эффективности торможения при перегреве текучей среды и снижение эффективности торможения вследствие эффекта домино.
[0023] Снижение эффективности торможения при снижении трения представляет собой механизм, используемый для преобразования кинетической энергии в тепло в тормозной системе. Трение представляет собой сопротивление движению между двумя объектами, которые находятся в контакте друг с другом. Если трение на фрикционной поверхности снижается до недопустимого уровня, способность преобразовывать кинетическую энергию в тепло также будет снижаться. Когда снижение трения на фрикционной поверхности происходит в результате нагрева, это называется снижением эффективности торможения при снижении трения. Когда снижение эффективности торможения при снижении трения происходит в гидравлической тормозной системе, педаль по-прежнему будет ощущаться жесткой для водителя, но он заметит различие в реакции транспортного средства на торможение. Для транспортных средств с пневматическими тормозами, когда происходит снижение эффективности торможения при снижении трения, водитель может сообщать о педали, опускающейся до пола. Трение на тормозе подвержено влиянию температуры на фрикционной поверхности. Тепловой/фрикционный профиль отличается от накладки к накладке и может быть линейным или криволинейным. Либо трение на тормозной накладке может постепенно снижаться (линейный профиль), когда тепло в тормозе увеличивается, либо, альтернативно, трение на накладке может увеличиваться до тех пор, пока оно не достигнет максимума, а затем быстро начинает снижаться (криволинейный профиль).
[0024] Механическое снижение эффективности торможения чаще всего связанно с барабанными тормозами, а не с дисковыми тормозами. В барабанном тормозе исполнительное устройство накладки направлено наружу по направлению к фрикционной поверхности вращающегося барабана. Когда тормозной барабан нагревается, он расширяется наружу. Это расширение будет увеличивать диаметр барабана, отодвигая его от исполнительного устройства накладки. Расширение тормозного барабана вызывает необходимость увеличенного перемещения накладки и увеличенного перемещения исполнительного устройства. Если расширение является достаточно большим, это может заставлять исполнительное устройство достигать нижнего предела и может приводить к выходу тормозов из строя. Исполнительное устройство накладки дискового тормоза находится под прямым углом к вращающемуся диску, и расширение диска происходит наружу по направлению к исполнительному устройству, а не от него. По этой причине дисковые тормоза имеют лучшую устойчивость к снижению эффективности торможения.
[0025] Снижение эффективности торможения при перегреве текучей среды связано с гидравлической тормозной системой, которая работает, используя несжимаемую текучую среду (тормозную жидкость) для передачи усилия водителя, нажимающего на педаль тормоза, на тормозные накладки. Воздух и испаренная текучая среда являются сжимаемыми, и если позволить их присутствие в гидравлической тормозной системе, педаль тормоза будет проваливаться, и усилие, передаваемое накладке, будет снижено. Подобно воде тормозная жидкость может закипать и переходить в пар, если она становится достаточно горячей. Снижение эффективности торможения при перегреве текучей среды представляет собой перегрев тормозной жидкости, заставляющий ее испаряться. Испаренная текучая среда должна будет сжаться, прежде чем система сможет передать усилие педали на накладку. В большинстве случаев будет недостаточно хода педали, чтобы сделать это.
[0026] Снижение эффективности торможения вследствие эффекта домино происходит тогда, когда некоторые тормоза в системе имеют больший тормозной момент, чем другие. Этот дисбаланс может быть результатом плохого обслуживания, плохого распределения нагрузки или легких подтормаживаний. Тормоза, производящие больше отрицательного момента, будут нагреваться значительно быстрее, чем они должны, что может приводить к снижению их эффективности торможения. Если тормоза с высоким моментом выходят из строя, то другие тормоза будут получать непропорционально большее количество тепла. Далее эти перегруженные тормоза также, вероятнее всего, выйдут из строя, отсюда и эффект домино.
[0027] В одном варианте выполнения тормозная способность включает в себя переменную тормозной способности, причем величина переменной основана на различии между температурой тормозного материала и пороговым значением температуры, при котором снижение эффективности торможения происходит при компенсации за счет прогнозируемого роста температуры тормозного материала. Прогнозируемый рост температуры тормозного материала может быть статическим определением, основанным на скорости транспортного средства, весе транспортного средства и наклоне транспортного средства. Более полное определение прогнозируемого роста температуры тормозного материала может включать в себя изменение высоты, прогнозируемую продолжительность применения тормозов, маршрут из навигационной системы, указывающий будущую желаемую скорость и изменение высоты вдоль маршрута. На основании тормозной способности водитель может быть способен принять обоснованный порядок действий до возникновения критической ситуации. Например, если водитель транспортного средства, движущегося по горной дороге с крутым спуском, проинформирован о потенциальной ситуации снижения эффективности торможения вдоль запланированного маршрута, водитель может выбрать, чтобы съехать с этой дороги, чтобы остановить транспортное средство и позволить тормозному материалу охладиться. Другой вариант выполнения может включать в себя стрелку, которая поворачивается в соответствии с температурой тормозного материала и пороговым значением температуры, при котором происходит снижение эффективности торможения. Также вариант выполнения может включать в себя коэффициент трения тормозного материала или профиль коэффициента трения тормозного материала относительно температуры. Коэффициент трения тормозного материала или профиль коэффициента трения тормозного материала может отслеживаться и обновляться на основании ранее зарегистрированного прикладываемого тормозного усилия и результирующего тормозного усилия. Прикладываемое тормозное усилие может быть основано на положении педали тормоза или на давлении тормозной жидкости. Результирующее тормозное усилие может быть основано на многих факторах, включающих в себя профиль скорости транспортного средства, угол наклона транспортного средства, изменение высоты транспортного средства или вес транспортного средства.
[0028] Может быть желательным отслеживание тормозной способности при прохождении крутого спуска, буксировании трейлера или эксплуатации транспортного средства с высокими характеристиками на закрытой трассе, например, во время гонки, и может не быть желательным отслеживание тормозной способности при движении на низких скоростях с небольшим или отсутствующим наклоном или прогнозируемым изменением высоты.
[0029] Фиг. 1 иллюстрирует пример 100 транспортного средства 102, включающего в себя настраиваемый дисплей 114 для облегчения передачи информации водителю. Транспортное средство 102 может включать в себя различные типы пассажирского транспортного средства, такие как утилитарное транспортное средство типа кроссовер (CUV), спортивно-утилитарное транспортное средство (SUV), грузовик, туристическое транспортное средство (RV), лодка, самолет или другая подвижная машина для транспортировки людей или грузов. Следует отметить, что проиллюстрированное транспортное средство 102 является всего лишь примером, и большее количество, меньшее количество и/или по-другому расположенные элементы могут использоваться.
[0030] Система 104 отображения информации транспортного средства 102 может включать в себя один или более процессоров 106, выполненных с возможностью выполнения инструкций, команд и других процедур при обеспечении процессов, описанных здесь. Например, система 104 отображения информации может быть выполнена с возможностью выполнения инструкций приложения 136 отображения на основании параметров 138 отображения, загружаемых в память 108 для обеспечения элементов отображения информации, таких как счетчик пробега, расход топлива, история расхода топлива, цифровой спидометр, информация о двигателе или тормозная способность. Такие инструкции и другие данные могут поддерживаться энергонезависимым образом с использованием множества типов машиночитаемого носителя 110 данных. Машиночитаемый носитель 110 (также называемый считываемым процессором носителем или хранилищем) включает в себя любой постоянный носитель (например, материальный носитель), который участвует в обеспечении инструкций или других данных, которые могут быть считаны процессором 106 системы 104 отображения информации. Выполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков программирования и/или технологий, включая, не ограничиваясь и по отдельности или в сочетании, Java, C, C++, C#, Objective C, Fortran, Pascal, Java Script, Python, Perl и PL/SQL.
[0031] Система 104 отображения информации может быть обеспечена различными элементами, позволяющими пассажирам транспортного средства взаимодействовать системой 104 отображения информации. Например, система 104 отображения информации может включать в себя контроллер 112 ввода, выполненный с возможностью приема пользовательского ввода от одного или более элементов 116 управления человеко-машинного интерфейса (HMI) транспортного средства 102, обеспечивающих взаимодействие пассажир-транспортное средство. Они могут включать в себя одну или более кнопок, ручек или других элементов управления, выполненных с возможностью вызова функций на системе 104 отображения информации. Система 104 отображения информации также может управлять или иным образом связываться с один или более настраиваемыми дисплеями 114, выполненными с возможностью обеспечения визуального вывода для пассажиров транспортного средства посредством контроллера 118 дисплея.
[0032] Настраиваемый дисплей 114 может быть расположен в приборной панели транспортного средства, например, в щитке приборов. В других примерах настраиваемый дисплей 114 может быть частью другой системы отображения, такой как навигационная система, или может быть частью специализированной системы 104 отображения информации в другом месте в транспортном средстве 102. Настраиваемый дисплей 114 может быть жидкокристаллическим дисплеем (LCD), плазменным дисплеем, дисплеем на органических светодиодах (OLED) или любым другим подходящим дисплеем. В некоторых случаях настраиваемый дисплей 114 может быть сенсорным экраном, дополнительно выполненным с возможностью приема сенсорного ввода пользователей с помощью контроллера 118 дисплея, тогда как в других случаях настраиваемый дисплей 114 может быть только дисплеем без возможностей сенсорного ввода, например, когда он включен в щиток приборов за рулевым колесом.
[0033] Система 104 отображения информации может быть дополнительно выполнена с возможностью связи с другими компонентами транспортного средства 102 через одну или более шин 120 в транспортном средстве. Шины 120 в транспортном средстве могут включать в себя одну или более из шин локальной сети контроллеров (CAN) транспортного средства, шины сети Ethernet и шины передачи данных мультимедийных систем (MOST) в качестве некоторых неограничивающих возможностей. Шины 120 в транспортном средстве могут позволять системе 104 отображения информации связываться с другими системами в транспортном средстве 102. Примерные системы транспортного средства, описанные подробно ниже, могут связываться с системой 104 отображения информации через шину 120 в транспортном средстве. В других примерах система 104 отображения информации может быть соединена с большим или меньшим количеством шин 120 в транспортном средстве, и один или более элементов 116 управления HMI или других компонентов могут быть соединены с системой 104 отображения информации через шины 120 в транспортном средстве или непосредственно без соединения с шинами 120 в транспортном средстве.
[0034] В качестве примера, модуль управления 122 силовым агрегатом может быть компонентом, связанным с системой 104 отображения информации, и может быть выполнен с возможностью обеспечения информации для системы 104 отображения информации, касающейся управления рабочими компонентами двигателя (например, управление холостым ходом, подача топлива, управление выбросами, диагностические коды двигателя, обороты двигателя и т.д.). Модуль 124 управления кузовным оборудованием может быть выполнен с возможностью управления различными функциями управления питанием, такими как внешнее освещение, внутреннее освещение, бесключевой доступ, удаленный запуск соединение фонарей прицепа, нажатие педали тормоза, и обеспечивает информацию для системы 104 отображения информации, такую как информация о состоянии точки доступа (например, состояние закрытия капота, дверей и/или багажника транспортного средства 102). Модуль 126 антиблокировочной системы может быть выполнен с возможностью обеспечения управления и контроля за компонентами тормозной системы, а также для обеспечения информации для системы 104 отображения информации, касающейся компонентов (например, давление главного цилиндра, уровень тормозной жидкости, прикладываемое тормозное усилие, температура тормозной жидкости и т.д.). Модуль 128 курсовой устойчивости может быть выполнен с возможностью выполнения функций, таких как управление активной подвеской, регулирование тяги и управление тормозом, и обеспечивает воспринимаемую информацию о динамике транспортного средства для системы 104 отображения информации и для модуля информационно-развлекательной системы, такую как угол крена, угол тангажа, скорость рыскания, скорость крена, скорость тангажа, боковая и продольная скорости, боковое и продольное ускорения, проскальзывание шин, скорость проскальзывания шин. Модуль 130 управления телематикой может включать в себя модем в транспортном средстве, выполненный с возможностью доступа к службам связи сети связи (не показана), таким как сетевые службы с коммутацией пакетов (например, доступ в Интернет, службы голосовой связи по Интернет-протоколу (VoIP)) для системы 104 отображения информации и других устройств, соединенных через шину 120 в транспортном средстве. Модуль 130 управления телематикой может быть выполнен с возможностью связи с удаленным устройством или портативным устройством, таким как мобильный телефон, планшет, часы, персональное портативное устройство, удаленный сервер или другая электронная система. Связь может быть использована для передачи информации на процессор или контроллер. Информация может представлять собой данные, указывающие запланированный маршрут, запланированное изменение высоты или обновленный коэффициент трения для тормозного материала. Навигационная система 132 может быть выполнена с возможностью при вводе места назначения устанавливать маршрут из текущего местоположения до места назначения. На основе маршрута навигационная система 132 может выполнять функции установления маршрута и отображения, такие как отображение маршрута, отслеживание перемещения транспортного средства, отслеживание изменений скорости транспортного средства и отслеживание изменений высоты транспортного средства вместе с прогнозированием изменений будущей скорости транспортного средства и прогнозированием изменений будущей высоты транспортного средства на основе маршрута. Текущее местоположение может быть определено с помощью модуля 134 системы глобального позиционирования (GPS). Модуль 132 GPS может быть в сообщении с удаленными спутниками, позволяя модулю GPS прогнозировать изменения будущей скорости транспортного средства 102 и прогнозировать изменения будущей высоты транспортного средства 102 на основе текущего местоположения транспортного средства, курса транспортного средства и данных карты, указывающих текущую дорогу, по которой движется транспортное средство.
[0035] Приложение 136 отображения может быть установлено в системе 104 отображения информации и может быть использовано, чтобы позволять транспортному средству 102 обеспечивать вывод на контроллер 118 дисплея так, что настраиваемый дисплей 114 передает информацию, относящуюся к работе транспортного средства 102, водителю. В качестве примера, приложение 136 отображения может быть выполнено с возможностью обеспечения структуры меню с помощью настраиваемого дисплея 114, имеющей набор категорий, в которых размещаются информационные экраны, такие как производительность, ходовая часть, буксировка, горные перевалы и бездорожье. Структура меню может дополнительно включать в себя информационные экраны, которые могут быть выбраны из категорий. Например, категория производительности может включать в себя экран счетчика кругов для временного разделения между последовательными кругами по закрытой трассе, экран g-силы для бокового ускорения и экран тормозной способности. В качестве дополнительных примеров, категория информации о ходовой части может включать в себя экран выбора датчика, экран давления шин, экран цифрового спидометра, экран информации о двигателе и экран тормозной способности. В качестве некоторых дополнительных примеров, категория буксировки может включать в себя экран состояния буксировки, экран информации о буксировке, экран состояния фонарей прицепа, экран установки прицепа, экран контрольного списка соединений и экран тормозной способности, и категория бездорожья может включать в себя экран состояния бездорожья, экран наклона транспортного средства, экран распределения мощности и экран тормозной способности. Когда экран выбран из структуры меню (например, через пользовательский ввод в элементы 116 управления HMI), выбранный экран может быть обеспечен на настраиваемом дисплее 114. Также дисплей может использоваться в сочетании с механическими стрелками, например, имеющими валы датчиков на периферии дисплея, тогда как стрелки выполнены с возможностью проходить над дисплеем. Дисплей может быть выполнен в качестве лицевой панели для датчиков. В настоящем документе дисплей может изменяться, чтобы соответствовать желаемой характеристике транспортного средства, отображаемой совокупностью датчика/дисплея.
[0036] Фиг. 2 схематически иллюстрирует силовой агрегат транспортного средства с приводом на задние колеса и интерфейс водителя. Жирные сплошные линии представляют собой механические соединения потока мощности, такие как валы. Штриховые линии представляют собой поток информационных сигналов. Для ясности пути потока мощности и сигналы, на которые не влияет настоящее изобретение, могут быть исключены из чертежей. Двигатель 210 генерирует энергию при сжигании топлива. Стартер 212 использует электрическую энергию от аккумулятора для ускорения двигателя до скорости, при которой может поддерживаться процесс сгорания. Трансмиссия 214 устанавливает множество путей потока мощности с различными отношениями числа оборотов и крутящего момента между коленчатым валом двигателя и выходным валом трансмиссии для приведения мощности в соответствие с текущими потребностями транспортного средства. Дифференциал 216 делит мощность с выходного вала трансмиссии между левым и правым задними колесами 218 и 220, позволяя незначительные различия в скорости, например, когда транспортное средство поворачивает за угол. Передние колеса 222 и 224 не снабжены приводом. Силовой агрегат с приводом на четыре колеса может включать в себя раздаточную коробку, которая отводит часть или всю мощность с выходного вала трансмиссии на передние колеса. Силовой агрегат с приводом на передние колеса приводит в движение передние колеса, а не задние колеса. В силовом агрегате с приводом на передние колеса трансмиссия и дифференциал могут быть объединены в единый корпус.
[0037] Тормоза 226, 228, 230 и 232 выборочно удерживают колеса 218, 220, 222 и 224 соответственно. Обычно задействование тормозов происходит в ответ на нажатие педали 234 тормоза водителем. Способность к передаче крутящего момента тормозов изменяется в зависимости от степени нажатия на педаль и/или усилия, прикладываемого к педали 234. Электронный парковочный тормоз (EPB) 236 может быть задействован, чтобы поддерживать текущий уровень способности к передаче крутящего момента по меньшей мере одного из тормозов даже после того, как педаль 234 тормоза опущена. Трансмиссия 214 также включает в себя механизм парковки. Механизм парковки представляет собой механизм, выполненный с возможностью удерживать транспортное средство неподвижным в течение неопределенного периода времени, не потребляя энергии. Обычно механизм парковки включает в себя парковочную защелку, которая зацепляет парковочную шестерню на выходном валу трансмиссии. Парковочная защелка обычно выполнена с возможностью не зацеплять парковочную шестерню, когда транспортное средство движется на скорости выше, чем относительно низкое пороговое значение скорости. Парковочный механизм может включать в себя элементы для задержки зацепления, если механизм срабатывает на скорости выше, чем пороговое значение скорости.
[0038] Водитель управляет работой силового агрегата путем взаимодействия с различными элементами управления. Как обсуждается ниже, водитель управляет запуском и остановкой двигателя путем управления элементами управления зажиганием, включающими в себя электронные модули 238 и кнопку 240 старт/стоп. Водитель выбирает желаемое направление движение (или нейтральный режим), используя переключатель диапазона передач, такой как кнопка 242 режима заднего хода, кнопка 244 нейтрального режима и кнопка 246 режима движения вперед. В частности, переключатель диапазона передач не обеспечивает прямой явный выбор режима парковки. Как только водителем выбран диапазон, водитель управляет крутящим моментом на колесах, используя педаль 248 газа (для положительного крутящего момента) и педаль 234 тормоза (для отрицательного крутящего момента). Обратная связь относительно текущего состояния силового агрегата обеспечивается для водителя с помощью дисплея 250.
[0039] Контроллер 252 передает сигналы для управления различными компонентами силового агрегата на основании осуществляемого водителем управления элементами управления, перечисленными выше, и на основании других датчиков. Эти другие датчики могут включать в себя датчик 254 скорости транспортного средства и датчик 256 присутствия водителя. Датчик присутствия водителя может быть выполнен с возможностью обнаружения веса на водительском сиденье подобно датчику пассажира, используемому для управления активацией подушек безопасности со стороны пассажира.
[0040] Алгоритмы управления описаны ниже и на нескольких чертежах, показывающих блок-схемы. Алгоритмы управления описаны как несколько контроллеров связи, но могут быть реализованы множеством способов, включая несколько процессоров, один контроллер, выполняющий несколько потоков управления, или один процессор, выполняющий один поток управления. На блок-схемах состояния управления представлены прямоугольниками со скругленными углами. Для каждой блок-схемы за раз одновременно активно одно состояние. Различные события запускают выполнение действий, как обозначено помеченными стрелками, ведущими от прямоугольников состояний. Эти события могут быть изменениями состояния в других блок-схемах или могут быть отправлены от датчиков в ответ на действия водителя или изменения состояния транспортного средства. Прямоугольники с прямыми углами представляют собой действия, предпринимаемые контроллером. Ромбы представляют точки логического ветвления. Логика обработки событий может приводить к переходу в другое состояние, но это происходит не всегда. Переходы в другие состояния могут запускать события в других блок-схемах.
[0041] Фиг. 3 иллюстрирует графическое представление 300 тормозного усилия 302 двигателя по отношению к частоте 304 вращения двигателя на коленчатом валу двигателя. Тормозное усилие 302 двигателя также называется отрицательным крутящим моментом и представляет собой количество энергии, требуемое для вращения двигателя внутреннего сгорания (ICE). Вращение ICE производит отрицательный крутящий момент за счет сжатия воздуха в цилиндрах двигателя, вращательной массы двигателя и потерь на трение, связанных с двигателем. Хотя торможение двигателем связано с вращением двигателя и, таким образом, с функцией частоты 304 вращения двигателя, как показано в профиле 306 отрицательного крутящего момента 302 относительно частоты 304 вращения двигателя, трансмиссия может быть использована для умножения эффектов торможения двигателем.
[0042] Фиг. 4 иллюстрирует графическое представление 400 отрицательного крутящего момента 402 на колесе транспортного средства относительно скорости 404 транспортного средства для различных передач. В настоящем документе, основываясь на рабочем диапазоне двигателя приблизительно 1250-4000 об/мин (как показано на Фиг. 3), каждая передача умножает отрицательный крутящий момент двигателя. В настоящем документе трансмиссия показана со следующими передаточными числами: 2,25 на 2-ой передаче, 1,5 на 3-ей передаче, 1,0 на 4-ой передаче, 0,75 на пятой передаче и 0,65 на шестой передаче. Задний дифференциал представляет собой дифференциал с передаточным числом 3,73, и окружность шины совершает 500 оборотов за милю. Отношение дифференциала и передачи используется для умножения торможения двигателем, также называемого отрицательным крутящим моментом двигателя, на отрицательный крутящий момент на колесе. Другой аспект передаточного числа заключается в том, что передача уменьшает диапазон скоростей колеса, связанный с рабочим диапазоном двигателя. Например, на второй передаче скорость колеса составляет около 14 миль/ч (22,53 км/ч) при 1000 об/мин и 57 миль/час (91,73 км/ч) при 4000 об/мин, и отрицательный крутящий момент увеличивается от -900 Н⋅м при 14 миль/ч (22,53 км/ч) до -3300 Н⋅м при 57 миль/час (91,73 км/ч). Практическое влияние этого заключается в том, что понижение передачи трансмиссии увеличивает отрицательный крутящий момент на колесе и может использоваться для усиления фрикционных тормозов. Например, когда транспортное средство движется со скоростью 60 миль/ч (96,56 км/ч), торможение двигателем умножается на передаточное число так, что на 6-ой передаче имеется приблизительно -344 Н⋅м отрицательного крутящего момента, понижение передачи до 5-ой передачи увеличивает отрицательный крутящий момент до -482 Н⋅м отрицательного крутящего момента, понижение передачи до 4-ой передачи увеличивает отрицательный крутящий момент до -963 Н⋅м, понижение передачи до 3-ей передачи увеличивает отрицательный крутящий момент до -1933 Н⋅м, и понижение передачи до 2-ой передачи увеличивает отрицательный крутящий момент до -3400 Н⋅м. Однако на 6-ой передаче двигатель будет вращаться приблизительно с частотой 1200 об/мин, на 3-ей передаче двигатель будет вращаться с частотой 2800 об/мин, и на 2-ой передаче двигатель будет вращаться с частотой более 4000 об/мин, что выше рекомендуемой частоты вращения для двигателя на Фиг. 3. В связи с этим понижение передачи с 6-ой передачи на 3-ю передачу увеличивает отрицательный крутящий момент более чем на 400%, тем самым снижая потребность во фрикционных тормозах.
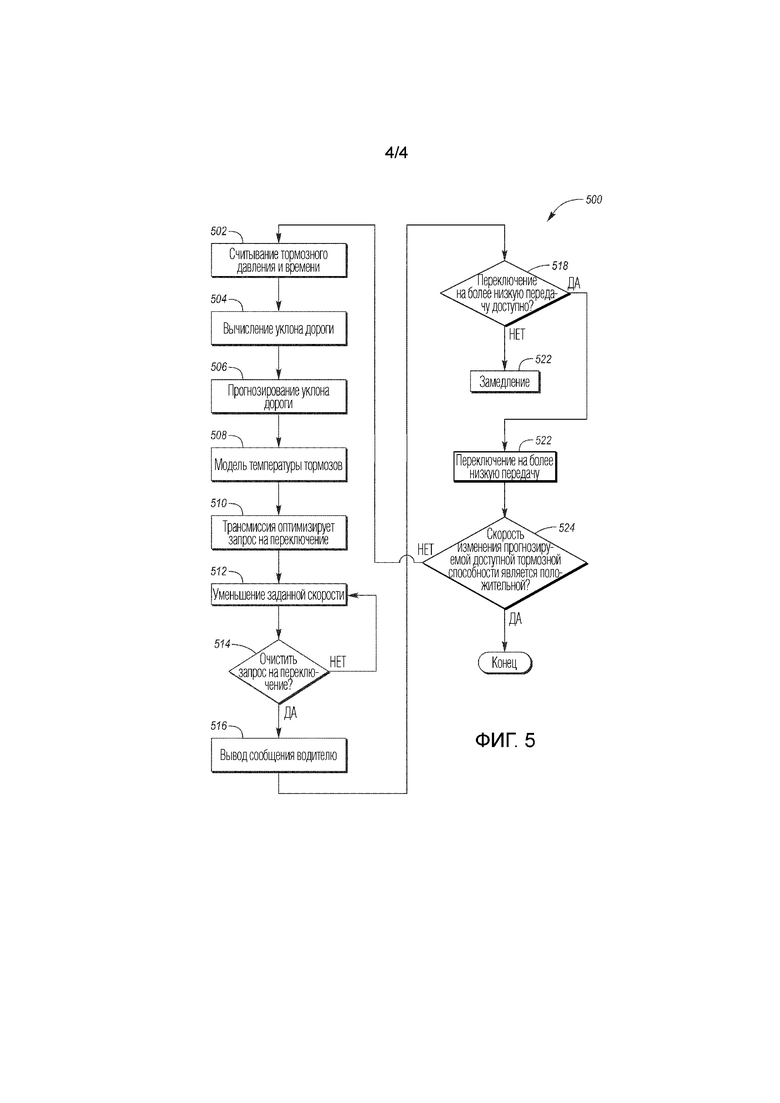
[0043] Фиг. 5 иллюстрирует блок-схему 500 системы управления, выполненной с возможностью изменения заданного значения круиз-контроля на основании прогнозируемого снижения эффективности торможения.
[0044] На операции 502 контроллер принимает сигнал тормозного давления и время, связанное с сигналом тормозного давления. Затем контроллер на операции 504 принимает уклон дороги. Уклон дороги может поступать от контроллера силового агрегата, контроллера трансмиссии, уклономера или может быть вычислен на основании входных данных от модулей и датчиков транспортного средства.
[0045] На операции 506 контроллер принимает прогноз уклона дороги. Прогноз уклона дороги может быть основан на прогнозируемом будущем маршруте. Прогнозируемый уклон дороги может включать в себя прогнозируемое изменение высоты вдоль дороги, по которой транспортное средство в настоящее время движется, или прогнозируемый уклон дороги вдоль маршрута, по которому транспортное средство, как ожидается, будет перемещаться на основании данных от навигационной системы. Также прогнозируемый уклон дороги может быть прогнозируемым изменением высоты, связанным с маршрутом, по которому транспортное средство, как ожидается, будет перемещаться на основании данных от удаленного сервера, принимаемых встроенным модемом транспортного средства.
[0046] Прогнозируемый маршрут перемещения может включать в себя места, в которых транспортное средство, как ожидается, будет применять тормоза, например, у знака STOP, на светофоре, в месте, для которого была ранее зарегистрирована меньшая скорость, или в месте, связанном с затором в движении в реальном времени. Пороговое значение прогнозируемого снижения эффективности торможения может уменьшаться, когда скорость транспортного средства увеличивается, когда вес транспортного средства увеличивается, когда угол наклона уменьшается (т.е. при спуске по холму или уклону), или когда прогнозируемый маршрут указывает на применение тормозов в течение увеличенной продолжительности.
[0047] На операции 508 контроллер определяет доступную тормозную способность на основании данных о тормозном давлении и времени и на температуре тормозов,. Увеличение или уменьшение температуры тормозов может быть основано на сигнале от термопары, выполненной с возможностью измерения температуры тормозного материала, это может быть основано на обнаружении света, например, инфракрасного света, указывающего температуру тормозного материала, или это может быть основано на модели тормоза. Модель тормоза может быть основана на многих факторах, включая наружную температуру, давление тормозной жидкости, тормозное усилие, продолжительность торможения, конструкцию тормозного диска, тормозной материал, коэффициенты трения, угол наклона и вес транспортного средства. Вес транспортного средства может быть введен водителем или определен системой подвески транспортного средства или модулем управления силовым агрегатом (PCM), модулем управления двигателем (ECM) или модулем управления трансмиссией (TCM). Также вес транспортного средства может включать в себя вес прицепа, соединенного с транспортным средством. Присутствие прицепа может быть определено с помощью кнопки буксировки/движения с нагрузкой кнопка или путем обнаружения фонарей прицепа. Наряду с присутствием прицепа осуществляется определение тормозов прицепа, причем модель тормоза может компенсировать использование тормозов прицепа.
[0048] Датчик термопары может обеспечивать температуру всех четырех тормозов или некоторой комбинации тормозов (например, одного переднего и одного заднего тормозов или двух передних тормозов). Сигнал температуры тормозов от термопары может быть средним значением всех входных данных термопары или самой высокой зарегистрированной температурой. Сигнал может быть отправлен на шину транспортного средства, такую как шина CAN.
[0049] Модель также может быть способна компенсировать заклинивший или залипший тормозной суппорт. В настоящем документе доступная тормозная способность представляет собой величину торможения, доступную для увеличения тормозов от температуры тормозов до порогового значения прогнозируемого снижения эффективности торможения. Также пороговое значение прогнозируемого снижения эффективности торможения может увеличиваться или уменьшаться, на основании факторов, включающих в себя скорость транспортного средства, угол наклона, прогнозируемый маршрут перемещения или прогнозируемое изменение высоты. Прогнозируемый маршрут перемещения может включать в себя места, в которых транспортное средство, как ожидается, будет применять тормоза, например, у знака STOP, на светофоре, в месте, для которого была ранее зарегистрирована меньшая скорость, или в месте, связанном с затором в движении в реальном времени. Если тормозная способность падает ниже нижнего порогового значения, контроллер на операции 510 может запрашивать переключение на более низкую передачу, чтобы уменьшать потребность во фрикционных тормозах при торможении.
[0050] На основании текущей скорости транспортного средства, прогнозируемом уклоне дороги, массе транспортного средства и других факторах, контроллер может уменьшать заданную скорость или использовать дисплей для запроса у водителя уменьшения заданной скорости на операции 512. Уменьшение заданной скорости может приводить к выполнению подтормаживания антиблокировочной системой (ABS), чтобы уменьшать скорость так, что переключение на более низкую передачу может быть выполнено, причем обороты двигателя на более низкой передаче выходят за ограничение максимальных оборотов двигателя. Если контроллер запрашивает у водителя уменьшение заданной скорости, дисплей может отображать сообщение, такое как «Уменьшите заданную скорость для сохранения тормозов», или, альтернативно, заданный значок на дисплее. Если контроллер автоматически уменьшает заданную скорость, он может использовать несколько способов. Один способ заключается в уменьшении заданной скорости на заданную величину, скажем 1 миля/ч (1,61 км/ч), до тех пор, пока результирующие обороты двигателя не будут достаточно низкими, чтобы позволять переключение на более низкую передачу. Другой способ заключается в вычислении максимальной заданной скорости на следующей более низкой передаче, используя целевую передачу и передаточные отношения осей, и уменьшении заданной скорости соответственно. Как только заданная скорость транспортного средства будет достигнута, контроллер будет выполнять переключение на более низкую передачу, получая дополнительный тормозной момент двигателя, как проиллюстрировано на Фиг. 4. Этот процесс может быть итеративным и может быть использован контроллером так часто, как необходимо, для поддержания оптимальной скорости транспортного средства на спуске с уклонов при использовании как можно меньшего трения при торможении.
[0051] На операции 514 контроллер проверяет, что переключение на более низкую передачу может быть выполнено, причем обороты двигателя на более низкой передаче меньше ограничения максимальных оборотов двигателя. Контроллер может удостовериться, что обороты двигателя на более низкой передаче меньше заданного защитного диапазона от ограничения максимальных оборотов двигателя. Например, если максимальные обороты двигателя составляют 4000, контроллер может ограничить максимальные обороты на 500 об/мин меньше максимума или 3500 об/мин. Если контроллер определяет, что обороты двигателя на более низкой передаче выше заданного защитного диапазона от ограничения максимальных оборотов двигателя, контроллер может перейти к операции 512 и дополнительно уменьшить заданное значение и выполнить подтормаживание. Если контроллер определяет, что обороты двигателя на более низкой передаче меньше заданного защитного диапазона от ограничения максимальных оборотов двигателя, контроллер может приступать к операции 516.
[0052] На операции 516 контроллер может выводить сообщение в транспортном средстве. Например, грузовик или пассажирское транспортное средство может выводить сообщение «Уменьшите скорость круиз-контроля, чтобы избежать снижения эффективности торможения». Спортивный автомобиль или эксплуатация в режиме высокой производительности может выводить сообщение «Оптимальная температура тормозов достигнута - уменьшите скорость круиз-контроля». Гибридное транспортное средство, электрическое транспортное средство или транспортное средство с механической коробкой передач могут выводить сообщение «Выберите более низкую передачу, чтобы избежать снижения эффективности торможения» или «Выполните переключение на более низкую передачу, чтобы избежать снижения эффективности торможения». Также может быть использовано вторичное пороговое значение, и сообщение при достижении вторичного порогового значения может включать в себя «Неизбежное снижение эффективности торможения - немедленно остановитесь безопасным образом».
[0053] На операции 518 контроллер может определять, находятся ли обороты двигателя на более низкой передаче выше заданного защитного диапазона от ограничения максимальных оборотов двигателя, контроллер может перейти к операции 522 и уменьшить скорость транспортного средства с использованием фрикционных тормозов. Если контроллер определяет, что обороты двигателя на более низкой передаче меньше заданного защитного диапазона от ограничения максимальных оборотов двигателя, контроллер может приступать к операции 522 и выполнять переключение трансмиссии на более низкую передачу.
[0054] На операции 524 контроллер определяет скорость изменения прогнозируемой тормозной способности. Положительная скорость изменения прогнозируемой тормозной способности указывает на увеличение тормозной способности и является желательной, когда прогнозируемая тормозная способность падает ниже нижнего порогового значения. Если скорость изменения прогнозируемой тормозной способности является отрицательной, контроллер может перейти к началу на операции 502, чтобы переоценить условия торможения.
[0055] Процессы, способы или алгоритмы, раскрытые в настоящем документе, могут быть переданы/реализованы с помощью устройства обработки, контроллера или компьютера, которые могут включать в себя любой существующий программируемый электронный блок управления или специализированный электронный блок управления. Подобным образом, процессы, способы или алгоритмы могут храниться в виде данных и инструкций, выполняемых контроллером или компьютером, во многих формах, включая, но не ограничиваясь, информацию, постоянно хранящуюся на неперезаписываемых носителях данных, таких как устройства ROM, и изменяющуюся информацию, хранящуюся на перезаписываемых носителях данных, таких как дискеты, магнитные ленты, CD, устройства RAM и другие магнитные и оптические носители данных. Процессы, способы или алгоритмы также могут быть реализованы в исполняемом программном объекте. Альтернативно, процессы, способы или алгоритмы могут быть осуществлены полностью или частично с использованием подходящих аппаратных компонентов, таких как интегральные схемы специального назначения (ASIC), программируемые пользователем вентильные матрицы (FPGA), конечные машины, контроллеры или другие аппаратные компоненты или устройства, или комбинация аппаратных, программных и встроенных аппаратно-программных компонентов.
[0056] При том, что выше описаны примерные варианты выполнения, не следует предполагать, что эти варианты выполнения описывают все возможные формы, охватываемые формулой изобретения. Слова, используемые в описании, являются описательными словами, а не ограничивающими, и следует понимать, что могут быть выполнены различные изменения без отклонения от замысла и объема охраны изобретения. Как описано выше, признаки различных вариантов выполнения могут быть объединены для формирования дополнительных вариантов выполнения изобретения, которые не могут быть в явном виде описаны или проиллюстрированы. Хотя различные варианты выполнения могут быть описаны как обеспечивающие преимущества или являющиеся предпочтительными относительно других вариантов выполнения или известных в уровне техники реализаций в отношении одной или более желаемых характеристик, специалисту в данной области техники будет понятно, что возможен компромисс в отношении одного или более признаков или характеристик для достижения желаемых общих параметров системы, которые зависят от конкретного применения и реализации. Эти параметры могут включать в себя, не ограничиваясь, стоимость, прочность, долговечность, стоимость срока службы, пригодность для продажи, внешний вид, упаковку, размер, удобство эксплуатации, вес, технологичность изготовления, легкость сборки и т.д. В связи с этим варианты выполнения, описанные как менее желаемые, чем другие варианты выполнения или известные в уровне техники реализации в отношении одной или более характеристик, не выходят за пределы объема охраны изобретения и могут быть желательны для конкретных применений.


Изобретение относится к способам и системам управления силовым агрегатом транспортного средства. Система круиз-контроля для транспортного средства содержит контроллер, выполненный с возможностью поддержания скорости транспортного средства около заданного значения и уменьшения заданного значения в ответ на падение прогнозируемой тормозной способности ниже порогового значения на основании прогнозируемого снижения эффективности торможения и выполнения переключения коробки передач транспортного средства на более низкую передачу для увеличения отрицательного крутящего момента, чтобы уменьшить снижение эффективности торможения. В способе управления силовым агрегатом транспортного средства уменьшают посредством контроллера заданное значение скорости транспортного средства, применяют фрикционные тормоза транспортного средства для уменьшения скорости транспортного средства до заданного значения и выполняют переключение коробки передач на более низкую передачу. Достигается уменьшение снижения эффективности торможения. 3 н. и 17 з.п. ф-лы, 5 ил.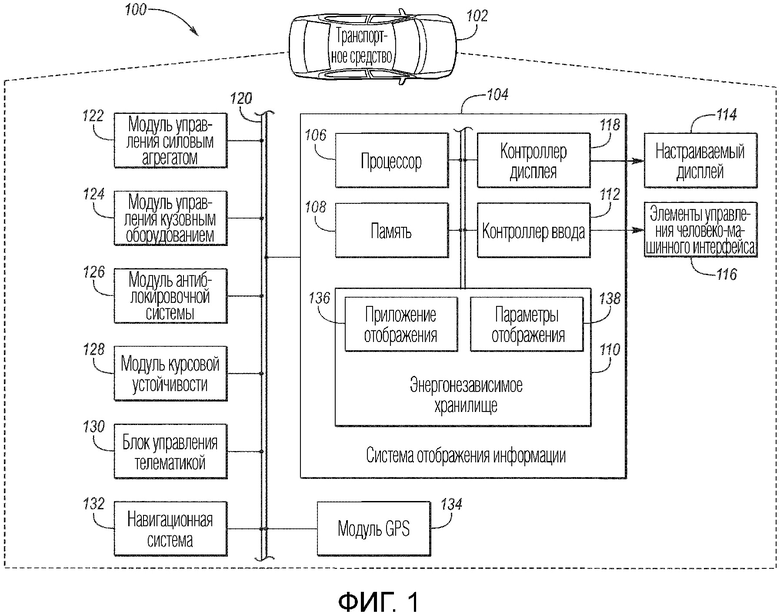
1. Система круиз-контроля для транспортного средства, содержащая:
контроллер, выполненный с возможностью поддержания скорости транспортного средства около заданного значения и уменьшения заданного значения в ответ на падение прогнозируемой тормозной способности ниже порогового значения на основании прогнозируемого снижения эффективности торможения и выполнения переключения коробки передач транспортного средства на более низкую передачу для увеличения отрицательного крутящего момента, чтобы уменьшить снижение эффективности торможения.
2. Система круиз-контроля по п. 1, в которой прогнозируемая тормозная способность получается из температуры фрикционного материала тормоза и прогнозируемого снижения эффективности торможения, получаемого из скорости, массы и текущего угла наклона транспортного средства.
3. Система круиз-контроля по п. 1, в которой прогнозируемая тормозная способность дополнительно получается из ожидаемого изменения высоты на заданном маршруте.
4. Система круиз-контроля по п. 1, в которой прогнозируемая тормозная способность дополнительно получается из ожидаемого тормозного усилия, требуемого на заданном маршруте.
5. Система круиз-контроля по п. 1, в которой прогнозируемая тормозная способность дополнительно получается из ожидаемого изменения высоты, связанного с текущим местоположением и направлением перемещения.
6. Система круиз-контроля по п. 1, в которой контроллер дополнительно выполнен с возможностью вывода прогнозируемой тормозной способности на основании коэффициента трения тормозного материала, характеризующегося ранее зарегистрированными изменениями температуры фрикционного материала, связанными с тормозным усилием и продолжительностью торможения.
7. Система круиз-контроля по п. 6, в которой температура фрикционного материала представляет собой выходные данные термопары или результат модели тормоза.
8. Система круиз-контроля по п. 6, в которой контроллер дополнительно выполнен с возможностью вывода предупреждения, если прогнозируемая тормозная способность меньше порогового значения или температура фрикционного материала превышает пороговое значение прогнозируемого снижения эффективности торможения.
9. Система круиз-контроля по п. 6, в которой прогнозируемая тормозная способность основана на различии между прогнозируемым снижением эффективности торможения и температурой фрикционного материала.
10. Силовой агрегат транспортного средства, содержащий:
двигатель;
автоматическую коробку передач, соединенную с двигателем; и
контроллер, выполненный с возможностью поддержания скорости транспортного средства около заданного значения и уменьшения заданного значения в ответ на падение прогнозируемой тормозной способности ниже порогового значения на основании прогнозируемого снижения эффективности торможения и выполнения переключения коробки передач на более низкую передачу для увеличения отрицательного крутящего момента.
11. Силовой агрегат по п. 10, в котором прогнозируемая тормозная способность основана на температуре, связанной с фрикционным материалом тормоза транспортного средства, и пороговом значении прогнозируемого снижения эффективности торможения, получаемого из скорости, массы и текущего угла наклона транспортного средства.
12. Силовой агрегат по п. 10, в котором прогнозируемое снижение эффективности торможения дополнительно получается из ожидаемого тормозного усилия, требуемого на заданном маршруте.
13. Силовой агрегат по п. 10, в котором прогнозируемое снижение эффективности торможения дополнительно получается из ожидаемого изменения высоты, связанного с текущим местоположением и направлением перемещения транспортного средства.
14. Силовой агрегат по п. 10, в котором прогнозируемое снижение эффективности торможения дополнительно основано на коэффициенте трения тормозного материала, характеризующемся ранее зарегистрированными изменениями температуры тормозов, связанными с тормозным усилием и продолжительностью торможения.
15. Способ управления силовым агрегатом транспортного средства, содержащий этапы, на которых:
в ответ на уменьшение прогнозируемой способности тормозов транспортного средства ниже заданного уровня
уменьшают посредством контроллера заданное значение скорости транспортного средства,
применяют фрикционные тормоза транспортного средства для уменьшения скорости транспортного средства до заданного значения и
выполняют переключение коробки передач на более низкую передачу, причем прогнозируемая способность основана на температуре, связанной с фрикционным материалом тормозов транспортного средства, и пороговом значении прогнозируемого снижения эффективности торможения, получаемого из скорости, массы и текущего угла наклона транспортного средства.
16. Способ по п. 15, в котором прогнозируемая способность тормозов транспортного средства дополнительно основана на коэффициенте трения тормозного материала.
17. Способ по п. 15, в котором способность тормозов транспортного средства основана на различии между температурой и пороговым значением прогнозируемого снижения эффективности торможения.
18. Способ по п. 15, в котором пороговое значение прогнозируемого снижения эффективности торможения дополнительно получают из ожидаемого изменения высоты, связанного с текущим местоположением и направлением перемещения.
19. Способ по п. 15, в котором пороговое значение прогнозируемого снижения эффективности торможения дополнительно получают из ожидаемого тормозного усилия, требуемого на заданном маршруте.
20. Способ по п. 15, в котором прогнозируемое снижение эффективности торможения основано на интеграле от тормозного давления.
| 0 |
|
SU148334A1 | |
| US 8027773 B2, 27.09.2011 | |||
| US 2004015283 A1, 22.01.2004 | |||
| RU 2014121661 A, 10.12.2015. | |||

