Область техники, к которой относится изобретение
Варианты осуществления, описанные в данном документе, относятся к системе обработки листов бумаги и к способу обработки листов бумаги.
Уровень техники
В некоторых типах промышленности, в которых совершаются транзакции с большим количеством банкнот, банкноты размещаются по номиналу. В такой компоновке, используется устройство обработки листов бумаги. Устройство обработки листов бумаги проверяет банкноты. Когда банкнота не удовлетворяет предварительно определенному условию, устройство обработки листов бумаги определяет банкноту в качестве отбракованной банкноты и отделяет подлинную банкноту и отбракованную банкноту. Когда отбракованная банкнота обнаруживается, отбракованная банкнота обязательно отбраковывается вручную, и в силу этого процесс становится сложным. Помимо этого, устройство обработки листов бумаги периодически обслуживается. Альтернативно, в случае, если возникает неуказанный сбой, возникает потребность в проверке. Такие обслуживания и проверки нормально выполняются вручную. Следовательно, имеется потребность в том, чтобы вызывать технического специалиста, что может выступать в качестве фактора снижения производительности устройства обработки листов бумаги.
Краткое описание чертежей
Фиг. 1 является схемой, иллюстрирующей пример конфигурации системы обработки листов бумаги согласно первому варианту осуществления;
Фиг. 2 является схемой, иллюстрирующей пачку G листов бумаги и карту B идентификации партий, которые вводятся в устройство обработки листов бумаги;
Фиг. 3 является блок-схемой, иллюстрирующей пример конфигурации системы обработки листов бумаги;
Фиг. 4 является схемой, иллюстрирующей взаимосвязь компоновки между системой обработки листов бумаги и полкой для хранения;
Фиг. 5 является схемой, иллюстрирующей пример конфигурации полки для хранения;
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки системы обработки листов бумаги;
Фиг. 7 является видом в перспективе, иллюстрирующим всю систему обработки листов бумаги согласно второму варианту осуществления;
Фиг. 8 является видом в перспективе, иллюстрирующим кассету для хранения системы обработки листов бумаги;
Фиг. 9 является видом в перспективе, иллюстрирующим устройство обработки листов бумаги в системе обработки листов бумаги;
Фиг. 10 является видом в перспективе устройства обработки листов бумаги, иллюстрирующим состояние, в котором один крышка открыта;
Фиг. 11 является видом в поперечном сечении устройства обработки листов бумаги, схематично иллюстрирующим внутреннюю конструкцию устройства обработки листов бумаги;
Фиг. 12 является блок-схемой, схематично иллюстрирующей конфигурацию устройства обработки листов бумаги и технологического робота;
Фиг. 13 является схемой, иллюстрирующей пример таблицы процессов;
Фиг. 14 является схемой, иллюстрирующей пример рабочей информации;
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей пример операции очистки в системе обработки листов бумаги;
Фиг. 16 является видом в перспективе системы обработки листов бумаги, иллюстрирующим первую процедуру в операции очистки;
Фиг. 17 является видом в перспективе системы обработки листов бумаги, иллюстрирующим другую первую процедуру в операции очистки;
Фиг. 18 является видом в перспективе системы обработки листов бумаги, иллюстрирующим другую первую процедуру в операции очистки;
Фиг. 19 является видом в перспективе, иллюстрирующим пример конфигурации в случае, если предоставляются два технологических робота;
Фиг. 20 является видом в перспективе системы обработки листов бумаги, иллюстрирующим первую процедуру в операции изъятия посторонних материалов;
Фиг. 21 является видом в перспективе системы обработки листов бумаги, иллюстрирующим другую первую процедуру в операции изъятия посторонних материалов;
Фиг. 22 является видом в перспективе системы обработки листов бумаги, иллюстрирующим другую первую процедуру в операции изъятия посторонних материалов; и
Фиг. 23 является видом в перспективе системы обработки листов бумаги, иллюстрирующим другой пример схемы размещения устройства обработки листов бумаги.
Подробное описание изобретения
В дальнейшем описываются различные варианты осуществления со ссылкой на прилагаемые чертежи. В общем, согласно одному варианту осуществления, система обработки листов бумаги содержит устройство обработки листов бумаги и устройство-робот. Устройство обработки листов бумаги содержит проверочное устройство, которое проверяет множество входных листов бумаги и карту идентификации партий, вводимую вместе с листами бумаги, устройство отбраковки, которое выдает карту идентификации партий в порт для отбраковки вместе с отбракованным листом бумаги, не удовлетворяющим предварительно определенному условию в листах бумаги, проверенных посредством проверочного устройства, и первый модуль связи, выполненный с возможностью передавать предварительно определенный сигнал, указывающий то, что проверка выполняется вплоть до единицы обработки, когда карта идентификации партий обнаруживается посредством проверочного устройства. Устройство-робот содержит манипулятор робота, который допускает удерживание листа бумаги, и второй модуль связи, выполненный с возможностью передавать и принимать сигнал.
Когда второй модуль связи принимает предварительно определенный сигнал, устройство-робот извлекает отбракованный лист бумаги и карту идентификации партий посредством манипулятора робота и перемещается в другой блок хранения и передает уведомление относительно завершения перемещения отбракованного листа бумаги и карты идентификации партий в устройство обработки листов бумаги из второго модуля связи.
Настоящее раскрытие сущности предоставляется просто в качестве примера. Специалисты в данной области техники могут представлять себе надлежащую модификацию в пределах сущности изобретения, и очевидно, что все модификации принадлежат объему изобретения. Помимо этого, чертежи могут схематично иллюстрировать ширины, толщины и формы соответствующих частей по сравнению с фактическим внешним видом, с тем чтобы прояснять пояснение, но они предоставляются просто в качестве примера. Интерпретация изобретения не должна быть ограничена чертежами. В подробном описании и на чертежах этой заявки, идентичные ссылки с номерами должны присоединяться к идентичным элементам, уже описанным на предыдущих чертежах, и подробное описание надлежащим образом опускается.
Первый вариант осуществления
Фиг. 1 является схемой, иллюстрирующей пример конфигурации системы 1 обработки листов бумаги согласно первому варианту осуществления. Система 1 обработки листов бумаги, например, представляет собой систему, которая предоставляется в зоне ограниченного доступа и автоматически размещает листы бумаги (например, банкноты). Система 1 обработки листов бумаги содержит устройство 500 обработки листов бумаги, устройство-робот 530 и контроллер 540 (например, компьютер). Устройство 500 обработки листов бумаги выполнено с возможностью совмещать листы бумаги посредством выполнения определения подлинности, чтобы определять то, является или нет входной лист бумаги, такой как банкнота, поддельным, определение невредимости, чтобы определять то, поврежден или нет лист бумаги, и процесс подсчета, чтобы подсчитывать число листов бумаги по номиналу или виду. Устройство-робот 530 представляет собой устройство, которое извлекает лист бумаги, отбракованный из устройства 500 обработки листов бумаги, и переносит извлеченный лист бумаги в предварительно определенное место. Устройство 500 обработки листов бумаги и устройство-робот 530 соединяются беспроводным или проводным способом, чтобы обмениваться данными между собой, и управляются совместно.
Устройство 500 обработки листов бумаги содержит устройство 511 подачи, в которое загружается определенное число листов бумаги (например, банкнот), множество портов 516 для укладки, множество портов 517 для отбраковки и дисплей 518. Устройство 511 подачи включает в себя порт 512 для захвата. Множество листов бумаги, укладываемых в устройстве 511 подачи, вовлекаются в устройство из порта 512 для захвата по одному. Множество листов бумаги, вовлеченных в устройство 500 обработки листов бумаги, подвергаются различным процессам и укладываются в порт 516 для укладки. Множество портов 516 для укладки предоставляются в устройстве 500 обработки листов бумаги, чтобы классифицировать листы бумаги по виду, к примеру, по номиналу листа бумаги. В случае, если некоторые листы бумаги, из множества листов бумаги, вовлеченных в устройство 500 обработки листов бумаги, не удовлетворяют предварительно определенному условию проверки в процессе определения невредимости или определения подлинности, листы бумаги укладываются в порт 517 для отбраковки в качестве отбракованных банкнот. Дисплей 518 содержит, например, сенсорную панель, чтобы выполнять операции ввода устройства 500 обработки листов бумаги и отображать различные типы данных.
Устройство-робот 530 содержит, например, тележку 532, которая включает в себя колесо 533, манипулятор 531 робота, который предоставляется на тележке 532, руку 537, которая предоставляется на конце верхушки манипулятора 531 робота, и камеру 535. Манипулятор 531 робота представляет собой многовальный манипулятор, который включает в себя руку 537 для того, чтобы удерживать объект. Манипулятор 531 робота удерживает пачку листов бумаги, укладываемых в порт 516 для укладки или в порт 517 для отбраковки, и извлекает пачку. Манипулятор 531 робота перемещает извлеченную пачку в другое устройство хранения (например, в полку 550 для хранения (см. фиг. 4 и 5)), расположенный в позиции, отличающейся от устройства 500 обработки листов бумаги. Тележка 532 включает в себя колесо 533, которое приводится в действие посредством электромотора, и может самопроизвольно перемещаться в любое место. Следовательно, даже когда полка 550 для хранения располагается в позиции, превышающей диапазон перемещения манипулятора 531 робота, тележка 532 и манипулятор 531 робота перемещаются таким образом, что манипулятор 531 робота может извлекать пачку листов бумаги из устройства 500 обработки листов бумаги, чтобы хранить пачку на полке 550 для хранения.
Тележка 532 и манипулятор 531 робота управляются при работе на основе распознавания изображений камеры 535. Камера 535 может предоставляться в самом манипуляторе 531 робота при условии, что обеспечивается четкий вид для того, чтобы распознавать операцию манипулятора 531 робота, либо может предоставляться в корпусе, отделенном от манипулятора 531 робота.
Фиг. 2 является схемой, иллюстрирующей пачку G листов бумаги и карту B идентификации партий, которые вводятся в устройство 500 обработки листов бумаги. Пачка G листов бумаги представляет собой пачку, полученную посредством укладки множества листов C бумаги. Пачка G листов бумаги представляет собой одну пачку, содержащую предварительно определенное число листов C бумаги в процессе подсчета. Единица для подачи и перемещения предварительно определенного числа называется предварительно определенной единицей. Карта B идентификации партий присоединяется к одной пачке G листов бумаги. Карта B идентификации партий размещается в самой верхней или самой нижней позиции пачки G листов бумаги и обрабатывается в конце единицы обработки в устройстве 500 обработки листов бумаги.
Карта B идентификации партий, например, представляет собой карту, на которой печатается штрих-код BC, указывающий информацию пачки G листов бумаги. Карта B идентификации партий формируется таким образом, что она имеет размер, почти идентичный размеру листа C бумаги. Предыстория проверок пачки G листов бумаги управляется посредством карты B идентификации партий. Отдельный распознающий носитель, такой как RFID (радиочастотный идентификатор), может использоваться в качестве карты B идентификации партий вместо использования штрих-кода при условии, что отношение соответствия между пачкой G листов бумаги и картой B идентификации партий может распознаваться.
Фиг. 3 является блок-схемой, иллюстрирующей пример конфигурации системы 1 обработки листов бумаги варианта осуществления. Система 1 обработки листов бумаги включает в себя устройство 500 обработки листов бумаги, устройство-робот 530 и контроллер 540. Устройство 500 обработки листов бумаги содержит устройство 511 подачи, проверочное устройство 513, устройство 514 классификации, устройство 515 отбраковки, дисплей 518 отображения и модуль 519 связи.
Листы C бумаги в пачке G листов бумаги, размещенной около порта 512 для захвата устройства 511 подачи, вовлекаются в устройство 500 обработки листов бумаги по одному из порта 512 для захвата. Проверочное устройство 513 проверяет захваченный лист C бумаги. Проверочное устройство 513 выполняет определение подлинности в отношении того, является или нет лист C бумаги поддельным, определение невредимости в отношении того, поврежден или нет лист C бумаги, и определение в отношении того, совпадают или нет номинал и вид. Проверочное устройство 513 определяет то, что лист C бумаги является нормальным (или корректным), в случае, если лист C бумаги удовлетворяет предварительно определенному условию для проверки при определении подлинности и при определении невредимости. Проверочное устройство 513 определяет то, что лист C бумаги представляет собой отбракованную банкноту D, в случае, если лист C бумаги не удовлетворяет предварительно определенному условию проверки.
Помимо этого, в случае, если карта B идентификации партий извлекается из порта 512 для захвата, проверочное устройство 513 считывает информацию, связанную с картой B идентификации партий, на основе штрих-кода BC, нанесенного в карте B идентификации партий, и распознает то, что предварительно определенная единица листов бумаги подвергается процессу. Проверочное устройство 513 получает информацию карты B идентификации партий и определяет карту B идентификации партий в качестве отбракованной банкноты D. Например, карта B идентификации партий захватывается из порта 512 для захвата после предварительно определенной единицы листов C бумаги. Следовательно, когда карта B идентификации партий обнаруживается, проверочное устройство 513 определяет разделитель предварительно определенной единицы процессов.
Устройство 514 классификации классифицирует нормальный лист C бумаги и отбракованную банкноту D на основе результата проверки проверочного устройства 513. Дополнительно, устройство 514 классификации классифицирует нормальные листы C бумаги согласно номиналу. Помимо этого, устройство 514 классификации классифицирует карту B идентификации партий к отбракованной банкноте D на основе результата проверки проверочного устройства 513.
Устройство 515 отбраковки включает в себя множество портов 516 для укладки и множество портов 517 для отбраковки. Устройство 515 выдачи классифицирует и выдает лист C бумаги, классифицированный посредством устройства 514 классификации, в порт 516 для укладки, соответствующий каждому виду, или в порт 517 для отбраковки. При этой конфигурации, пачки листов C бумаги каждого вида укладываются во множестве портов 516 для укладки. Отбракованные банкноты D укладываются во множестве портов 517 для отбраковки.
Контроллер 540 передает сигнал завершения процесса в устройство-робот 530 через модуль 519 связи и уведомляет в отношении того, что предварительно определенная единица листов C бумаги размещается и укладывается. Сигнал завершения процесса, передаваемый посредством контроллера 540, может передаваться во время завершения предварительно определенной единицы процессов, либо может передаваться в середине процессов.
Например, контроллер 540 реализован посредством инструктирования процессору, такому как CPU (центральный процессор), выполнять программу (программное обеспечение). Помимо этого, контроллер 540, который описывается ниже, может быть реализован посредством LSI (большой интегральной схемы) компьютера или аппаратных средств, таких как ASIC (специализированная интегральная схема) и FPGA (программируемая пользователем вентильная матрица), либо может быть реализован посредством комбинации программного обеспечения и аппаратных средств.
Контроллер 540 взаимно блокирует и управляет устройством 500 обработки листов бумаги и устройством-роботом 530. Контроллер 540 может быть сконфигурирован посредством PC (персонального компьютера) или может быть сконфигурирован как единое целое с контроллером устройства 500 обработки листов бумаги.
Устройство-робот 530 содержит манипулятор 531 робота, тележку 532 и модуль 534 связи. При приеме сигнала завершения процесса через модуль 534 связи, устройство-робот 530 выполняет процесс, в котором отбракованная банкнота D и карта B идентификации партий извлекаются из порта 517 для отбраковки. Устройство-робот 530 управляется при работе посредством контроллера 540 на основе результата распознавания изображения, захваченного посредством камеры 535. Хотя одно устройство-робот примерно иллюстрируется, может предоставляться множество устройств-роботов 530. Соответствующим устройствам-роботам 530 могут назначаться такие роли, как подача пачки G листов бумаги в устройство 511 подачи и извлечение отбракованной банкноты D и карты B идентификации партий из порта 517 для отбраковки.
Фиг. 4 является схемой, иллюстрирующей взаимосвязь компоновки между системой 1 обработки листов бумаги и полкой 550 для хранения. Полка 550 для хранения, например, располагается таким образом, что она обращена к устройству 500 обработки листов бумаги. Устройство-робот 530 располагается между полкой 550 для хранения и устройством 500 обработки листов бумаги. Манипулятор 531 робота захватывает пачку отбракованных банкнот D вместе с картой B идентификации партий. Затем манипулятор 531 робота складирует пачку отбракованных банкнот D и карту B идентификации партий на полку 550 для хранения.
В случае, если манипулятор 531 робота находится вне рабочего диапазона для извлечения и хранения, устройство-робот 530 двигает тележку 532 посредством колеса 533, чтобы перемещать манипулятор 531 робота в рабочий диапазон. В случае, если пачка отбракованных банкнот D извлекается вместе с картой B идентификации партий, пачка отбракованных банкнот D и карта B идентификации партий могут загружаться снова в устройство 511 подачи посредством манипулятора 531 робота, или отбракованная банкнота D может проверяться снова.
Фиг. 5 является схемой, иллюстрирующей пример конфигурации полки 550 для хранения. Полка 550 для хранения имеет множество отсеков 551 для хранения, созданных посредством перегородок с множеством полок 552. В каждом из множества отсеков 551 для хранения, хранятся отбракованная банкнота D, извлеченная посредством партии, и карта B идентификации партий.
Далее описывается процесс в системе 1 обработки листов бумаги. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки системы 1 обработки листов бумаги. Во-первых, описывается процесс, выполняемый в устройстве 500 обработки листов бумаги. Устройство 511 подачи захватывает листы C бумаги по одному из пачки G листов бумаги с присоединенной картой B идентификации партий и вставляет лист C бумаги в устройство из порта 512 для захвата (S100). Проверочное устройство 513 проверяет захваченный лист C бумаги (S110). Проверочное устройство 513 определяет то, представляет лист собой лист C бумаги или карту B идентификации партий (S120). В случае, если определяется то, что лист представляет собой лист C бумаги, проверочное устройство 513 определяет то, удовлетворяется или нет предварительно определенное условие для подлинности и невредимости листа C бумаги (S130).
В случае, если лист C бумаги удовлетворяет предварительно определенному условию, устройство 514 классификации классифицирует нормальные листы C бумаги по виду. Устройство 515 отбраковки укладывает классифицированные нормальные листы C бумаги во множество портов 516 для укладки по виду (S140).
Устройство 500 обработки листов бумаги обнаруживает то, остается или нет лист C бумаги в устройстве 511 подачи (S150). В случае, если лист C бумаги остается, устройство 500 обработки листов бумаги выполняет S100-S140 многократно. В случае, если на S130 определяется то, что лист C бумаги не удовлетворяет предварительно определенному условию, устройство 514 классификации классифицирует лист C бумаги как отбракованную банкноту D, и устройство 515 отбраковки укладывает отбракованную банкноту D в порт 517 для отбраковки (S170). Помимо этого, в случае, если карта B идентификации партий обнаруживается на этапе S120, контроллер 540 передает сигнал завершения обработки партии в устройство-робот 530 через модуль 519 связи (S160) и переходит к процессу этапа S170. Устройство 514 классификации классифицирует карту B идентификации партий как отбракованную банкноту D, и устройство 515 выдачи укладывает карту B идентификации партий в порт 517 для отбраковки (S170).
Далее описывается работа устройства-робота 530. Устройство-робот 530 принимает сигнал завершения обработки партии, передаваемый из контроллера 540 через модуль 534 связи (S180: "Да"). Контроллер 540 инструктирует манипулятору 531 робота извлекать пачку отбракованных банкнот D и карту B идентификации партий из порта 517 для отбраковки на основе изображения, распознанного посредством камеры 535, и перемещает пачку отбракованных листов D и карту B идентификации партий на полку 550 для хранения (S190). Контроллер 540 передает сигнал завершения извлечения в устройство 500 обработки листов бумаги через модуль 534 связи (S200) и переходит к процессу этапа S150.
Согласно первому варианту осуществления, сконфигурированному так, как описано выше, система обработки листов бумаги имеет такую конфигурацию, в которой отбракованная банкнота D и карта B идентификации партий обрабатываются посредством устройства обработки листов бумаги и выдаются в порт для выдачи и затем извлекаются и перемещаются посредством устройства-робота 530 на полку для хранения. Следовательно, можно автоматически размещать листы бумаги. Система обработки листов бумаги может извлекать и хранить отбракованную банкноту D посредством устройства-робота 530 на полке 550 для хранения без обращения к рабочей силе. Следовательно, можно повышать уровень безопасности и эффективность работы.
Второй вариант осуществления
Фиг. 7 является видом в перспективе, схематично иллюстрирующим полную конфигурацию системы обработки листов бумаги согласно второму варианту осуществления. Как проиллюстрировано на фиг. 7, система 1 обработки листов бумаги согласно этому варианту осуществления предоставляется в зоне AA ограниченного доступа и автоматически размещает листы бумаги, например, банкноты. Например, зона AA окружена посредством множества стенок W, каждая из которых изготовлена из прополочной сетки. Часть стенки W содержит дверцу DR, которая является открываемой и закрываемой. Система 1 обработки листов бумаги содержит, например, два устройства 100A и 100B обработки листов бумаги, которые обрабатывают банкноты в качестве листов бумаги, и независимый технологический робот CR (устройство-робот), который выполняет произвольную обработку относительно устройств 100A и 100B обработки листов бумаги. Два устройства 100A и 100B обработки листов бумаги предоставляются параллельно горизонтальному направлению. Помимо этого, в этом варианте осуществления, система 1 обработки листов бумаги содержит устройство B1 нагнетания воздуха и вакуумное устройство B2, чтобы очищать требуемую часть устройств 100A и 100B обработки листов бумаги. Устройство B1 нагнетания воздуха и вакуумное устройство B2 предоставляются около устройств 100A и 100B обработки листов бумаги. Дополнительно, система 1 обработки листов бумаги содержит кассету CA для хранения, в которой хранятся множество пачек банкнот и карта идентификации партий. Кассета CA для хранения проходит через отверстие 70, которое формируется в стенке W, и располагается таким образом, что она входит и выходит из зоны AA.
В качестве примера, технологический робот CR содержит тележку 50, которая может автоматически двигаться, манипулятор 52 робота, предоставленный на тележке 50, и руку 54, которая служит в качестве концевого рабочего инструмента, предоставленного на конце верхушки манипулятора 52 робота. Тележка 50 содержит множество колес, электромотор, который приводит в действие эти колеса, и один или множество датчиков позиции, которые обнаруживают направление движения, расстояние движения и позицию перемещения тележки 50. Опорный стержень 51 устанавливается на тележке 50 с возможностью вращения. Базовый конец манипулятора 52 робота поддерживается с возможностью вращения на опорном стержне 51. Манипулятор 52 робота включает в себя одно или множество сочленений, каждое из которых может вращаться. Рука 54 содержит множество (например, три) рук или пальцев 56. Эти пальцы 56 выполнены с возможностью открываться и закрываться таким образом, чтобы удерживать требуемый объект. По меньшей мере, один палец 56 имеет вращающееся сочленение. Как описано ниже, технологический робот CR дополнительно содержит электронный глаз, предоставленный в руке 54. Электронный глаз может быть сконфигурирован, например, посредством отражательного датчика, инфракрасного датчика и камеры фиксации изображений. Электронный глаз опознает целевую часть, которая должна обрабатываться посредством технологического робота CR, информацию листов бумаги в кассете CA для хранения и различные целевые объекты.
Устройство B1 нагнетания воздуха содержит насос 62 выдачи, длинный шланг 63, который соединяется с портом для выдачи насоса 62 выдачи, и впрыскивающее сопло 64, которое присоединяется к концу верхушки шланга 63. Устройство B1 нагнетания воздуха впрыскивает сжатый воздух из впрыскивающего сопла 64 посредством выдвигания рычага (не проиллюстрирован) впрыскивающего сопла 64. Между использованием устройства B1 нагнетания воздуха, впрыскивающее сопло 64 подвешивается в подвесном кронштейне 65 для удерживания.
Вакуумное устройство B2 содержит всасывающий насос 72, длинный шланг 73, который соединяется со всасывающим портом всасывающего насоса 72, и всасывающее сопло 74, которое присоединяется к концу верхушки шланга 73. Вакуумное устройство B2 всасывает наружный воздух с использованием всасывающего сопла 74 посредством выдвигания рычага (не проиллюстрирован) всасывающего сопла 74. Между использованием вакуумного устройства B2, всасывающее сопло 74 подвешивается на подвесном кронштейне 75 для удерживания.
Технологический робот CR удерживает впрыскивающее сопло 64 посредством руки 54 и может переносить впрыскивающее сопло 64 вплоть до требуемой позиции. Помимо этого, технологический робот CR удерживает всасывающее сопло 74 с использованием руки 54 и может переносить всасывающее сопло 74 вплоть до требуемой позиции. Устройство B1 нагнетания воздуха и вакуумное устройство B2 не ограничены независимым предоставлением и также могут быть встроены в технологический робот CR.
Фиг. 8 является видом в перспективе, иллюстрирующим кассету CA для хранения. Как проиллюстрировано на чертеже, кассета CA для хранения включает в себя чехол 90 для хранения, который имеет открытую верхнюю поверхность или имеет прямоугольную коробчатую форму. Внутреннее пространство чехла 90 для хранения разделяется на множество (например, шесть) секций RA, RB, RC, RD, RE и RF хранения посредством перегородки 92 решетчатой формы. Шесть секций RA-RF хранения располагаются, например, в двух рядах. В каждой из секций RA-RF хранения, пара зажимных пластин 76a и 76b предоставляются на боковой стенке чехла и на внутренней поверхности перегородки 92, которые обращены друг к другу. Пара зажимных пластин 76a и 76b располагаются таким образом, что они обращены друг к другу с зазором между ними. Пара зажимных пластин 76a и 76b могут перемещаться в направлениях с приближением или отдалением друг от друга. Помимо этого, пара зажимных пластин 76a и 76b поджимаются в направлении приближения друг к другу посредством поджимающего элемента (не проиллюстрирован), такого как пружина.
Каждая из секций RA-RF хранения хранит одну группу из пачек G банкнот и карты B идентификации партий, которые представляют собой цели обработки. Пачка G банкнот включает в себя множество уложенных банкнот C. Карта B идентификации партий располагается таким образом, что она перекрывается с одним концом пачки G банкнот. Информация относительно пачки G банкнот, например, штрих-код, указывающий число листов и вид, печатается на карте B идентификации партий. Пачка G банкнот, включающая в себя карту B идентификации партий, например, хранится в секции хранения и располагается между парой зажимных пластин 76a и 76b. При этой конфигурации, пачка G банкнот и карта B идентификации партий удерживаются в предварительно определенной позиции хранения в состоянии, в котором оба конца в продольном направлении зажимаются между зажимными пластинами 76a и 76b. Дополнительно, в каждой секции хранения, в состоянии, в котором пачка G банкнот и карта B идентификации партий хранятся в предварительно определенной позиции хранения, пространство SA задается с обеих сторон пачки G банкнот и карты B идентификации партий таким образом, что пальцы 56 технологического робота CR могут вставляться в пространства SA.
Информационные пластины 78 предоставляются на внешней поверхности боковой стенки чехла 90 для хранения. Информация относительно пачек G банкнот, хранимых в кассете CA для хранения, например, штрих-код BC, указывающий секцию хранения, число листов и вид, печатается на каждой информационной пластине 78. Технологический робот CR считывает штрих-код BC с использованием электронного глаза и распознает информацию пачек G банкнот, хранимых в кассете CA для хранения. Технологический робот CR выбирает пачку G банкнот на основе считываемой информации, удерживает выбранную пачку G банкнот с использованием руки 54 и извлекает пачку из секции хранения.
Как проиллюстрировано на фиг. 7 и 8, стол 210 предоставляется около отверстия 70 стенки W в зоне AA. Кассета CA для хранения вставляется в зону AA извне через отверстие 70 и размещается на столе 210. Помимо этого, кассета CA для хранения может вовлекаться наружу через отверстие 70.
Кассета CA для хранения не ограничена вышеописанной конфигурацией и может иметь различные конфигурации при условии, что пачки банкнот могут храниться с возможностью извлечения. Число секций хранения не ограничено "6" и может составлять 5 или меньше или 7 или больше.
В этом варианте осуществления, устройства 100A и 100B обработки листов бумаги имеют идентичную конфигурацию. Следовательно, ниже приводится подробное пояснение с использованием устройства 100A обработки листов бумаги в качестве образца, и описание устройства обработки листов бумаги опускается.
Фиг. 9 является видом в перспективе, иллюстрирующим внешний вид устройства обработки листов бумаги. Фиг. 10 является видом в перспективе устройства обработки листов бумаги в состоянии, в котором крышка открыта. Как показано на фиг. 9, устройство 100A обработки листов бумаги содержит главный модуль 10, модуль 30 совмещения и укладочный и скрепляющий модуль 40, который представляет собой укладочное и скрепляющее устройство. Эти модули 10, 30 и 40 размещены в линию и электрически и механически соединены друг с другом. В этом варианте осуществления, устройство 100A обработки листов бумаги размещено на столе 200.
Главный модуль 10, модуль 30 совмещения и укладочный и скрепляющий модуль 40 включают в себя кожух 10A, кожух 30A и кожух 40A, соответственно. Эти кожухи 10A, 30A и 40A размещены в линию.
В основном модуле 10, множество портов 111a для извлечения (портов для укладки) формируются в нижней части боковой стенки кожуха 10A, чтобы извлекать уложенные банкноты. В центре боковой стенки, множество портов 111b для извлечения (портов для отбраковки) предоставляются с возможностью извлекать уложенные банкноты из поврежденных или отбракованных банкнот. Дополнительно, окно 113 формируется в центре боковой стенки. Окно 113 предоставляется в позиции, обращенной к функциональной панели DP (дисплею) главного модуля 10. Функциональная панель DP сконфигурирована посредством панели отображения и сенсорной панели. Функциональная панель DP может управляться через окно 113. Функциональная панель DP может просматриваться через окно 113.
Часть кожуха 10A (в данном документе, часть боковой стенки и часть верхней стенки, продолжающаяся до боковой стенки) формирует крышку 115 (дверцу), которая является открываемой и закрываемой. Дверца 115 поддерживается с возможностью вращения посредством множества шарниров H1, которые предоставляются в верхней стенке. Помимо этого, опущенная часть 116 для сцепления пальцев формируется в нижнем краю крышки 115. Кнопка 117 разблокировки (см. фиг. 10) для прекращения стопорения предоставляется внизу опущенной части 116.
Как проиллюстрировано на фиг. 10, когда стопорение прекращается посредством нажатия кнопки 117 разблокировки, крышка 115 вращается вверх вокруг шарнира H1 таким образом, что она открывается. Когда крышка 115 открыта, внутренняя конструкция (блок механизмов) главного модуля 10 является доступной, и доступ к внутренней конструкции является возможным.
Как показано на фиг. 9, вторая крышка 120 (дверца), которая является открываемой и закрываемой, предоставляется в нижней части боковой стенки кожуха 10A. Когда вторая крышка 120 открыта, ящик для сбора посторонних материалов является доступным и может выдвигаться из кожуха 10A.
В модуле 30 совмещения, множество портов 311a для извлечения (портов для укладки) формируются в нижней части боковой стенки кожуха 30A, чтобы извлекать уложенные банкноты. Часть кожуха 30A (в данном документе, часть боковой стенки и часть верхней стенки, продолжающаяся до боковой стенки) сконфигурирована посредством крышки (дверцы) 315, которая является открываемой и закрываемой. Крышка 315 поддерживается с возможностью вращения посредством множества шарниров H2, которые предоставляются в верхней стенке. Помимо этого, опущенная часть 316 для сцепления пальцев формируется в нижнем краю крышки 315. Кнопка 317 разблокировки (см. фиг. 10) для прекращения стопорения предоставляется внизу опущенной части 316.
Как проиллюстрировано посредством штрихпунктирной линии с двумя точками на фиг. 10, когда стопорение прекращается посредством нажатия кнопки 317 разблокировки, крышка 315 вращается вверх вокруг шарнира H2 таким образом, что она открывается. Когда крышка 315 открыта, внутренняя конструкция (блок механизмов) модуля 30 совмещения является доступной, и доступ к внутренней конструкции является возможным.
Как проиллюстрировано на фиг. 9, в укладочном и скрепляющем модуле 40, порт 411a для извлечения предоставляется в нижней части боковой стенки кожуха 40A, чтобы извлекать скрепленную пачку банкнот. Часть кожуха 40A (в данном документе, часть боковой стенки и часть верхней стенки, продолжающаяся до боковой стенки) сконфигурированы посредством крышки 415 (дверцы), которая является открываемой и закрываемой. Крышка (дверца) 415 поддерживается с возможностью вращения посредством множества шарниров H3, которые предоставляются в верхней стенке. Помимо этого, опущенная часть 416 для сцепления пальцев формируется в нижнем краю крышки 415. Кнопка 417 разблокировки (см. фиг. 10) для прекращения стопорения предоставляется внизу опущенной части 416.
Как проиллюстрировано посредством штрихпунктирной линии с двумя точками на фиг. 10, когда стопорение прекращается посредством нажатия кнопки 417 разблокировки, крышка 415 вращается вверх вокруг шарнира H3 таким образом, что она открывается. Когда крышка 415 открыта, внутренняя конструкция (блок механизмов) укладочного и скрепляющего модуля 40 является доступной, и доступ к внутренней конструкции является возможным.
Далее приводится описание относительно примера внутренней конструкции (блока механизмов, предоставленного в кожухах 10A, 30A и 40A) устройства 100A обработки листов бумаги. Фиг. 11 является видом в поперечном сечении, схематично иллюстрирующим внутреннюю конструкцию устройства обработки листов бумаги. Как проиллюстрировано на чертеже, главный модуль 10 включает в себя главный узел (основной контроллер) 12 управления, который управляет операциями главного модуля 10 и всего устройства, и функциональную панель DP, соединенную с главным узлом 12 управления. Например, функциональная панель DP сконфигурирована посредством панели отображения и сенсорной панели. Различные типы управляющих команд могут вводиться посредством касания, и различные типы информации могут отображаться. Главный модуль 10 включает в себя устройство 11 подачи, который размещается в состоянии, в котором определенное число банкнот P укладывается, собирающий механизм 14, который принимает банкноты P по одной из устройства 11 подачи, и тракт 16 транспортировки, через который переносится банкнота P, извлеченная посредством собирающего механизма 14. В тракте 16 транспортировки, предусмотрено множество транспортировочных валиков, между которыми размещается тракт 16 транспортировки, чтобы приводить в действие и направлять множество бесконечных транспортировочных ремней (не проиллюстрированы) и множество транспортировочных валиков, которые формируют транспортировочный механизм. Извлеченная банкнота P переносится с размещением между транспортировочными ремнями.
Устройство 11 подачи содержит опорную поверхность 11a, идущую под наклоном под произвольным углом к вертикальному направлению, монтажную поверхность 11b, идущую практически перпендикулярно опорной поверхности 11a, и пару направляющих стенок 11c, заданных вдоль противоположных сторон монтажной поверхности 11b. Порт для извлечения, через который банкноты P вводятся в устройство, формируется на границе между опорной поверхностью 11a и монтажной поверхностью 11b.
Множество (например, 2000 или больше) банкнот P могут укладываться и устанавливаться в устройстве 11 подачи. Самая нижняя из уложенных банкнот P помещается на монтажную поверхность 11b, и банкноты P устанавливаются с провисанием на монтажной поверхности 11b таким образом, что, например, их более длинные боковые края размещаются вдоль опорной поверхности 11a. Уложенные банкноты P последовательно вовлекаются в устройство через порт 11e для извлечения по одной от самой нижней банкноты P посредством собирающего механизма 14.
Устройство 11 подачи содержит подкладочную пластину 21, выполненную с возможностью перемещать уложенные банкноты P на сторону сбора или к монтажной поверхности 11b. Подкладочная пластина 21 является подвижной вдоль опорной поверхности 11a таким образом, что она может быть размещена на опорной поверхности 11a.
Собирающий механизм 14 содержит множество собирающих валиков 24 (извлекающий валик), которые предоставляются таким образом, что они примыкают к банкноте P на монтажной поверхности 11b, отделяющий валик 25, который размещен в катящемся контакте с собирающими валиками 24 на стороне порта для извлечения, и приводной электромотор 26, который вращает собирающие валики 24 с предварительно определенной скоростью.
По мере того, как собирающие валики 24 вращаются, они собирают самую нижнюю банкноту P и доставляют ее в тракт 16 транспортировки. В это время, вторая и последующие банкноты P отделяются от собранной банкноты посредством отделяющего валика 25. Таким образом, банкноты P собираются по одной из устройства 11 подачи и доставляются в тракт 16 транспортировки.
Устройство 13 коррекции шага транспортировки, который корректирует шаг транспортировки банкнот P, проверочное устройство 18, которое проверяет банкноты P со скорректированным шагом транспортировки по одной, и устройство 19 считывания штрих-кодов располагаются вдоль тракта 16 транспортировки. Проверочное устройство 18 расположено выше порта для извлечения устройства 11 подачи относительно вертикального направления. Проверочное устройство 18 обнаруживает достоинство, форму, толщину, сторону (лицевую или тыльную), подлинность, годность, двойной сбор и т.д. для банкнот P. В данном документе, обнаружение невредимости заключается в том, чтобы обнаруживать годную банкноту для обращения и негодную банкноту для обращения вследствие пятен и повреждений. Например, в случае, если используется карта идентификации партий, устройство 19 считывания штрих-кодов считывает карту идентификации партий, проходящую через проверочное устройство 18, или штрих-код, присоединенный к карточке для казино, и отправляет считываемую информацию в главный узел 12 управления.
Тракт 16 транспортировки идет в нижнюю сторону на одном конце из собирающего механизма 14 и порта для извлечения и идет снизу вверх под углом относительно вертикального направления вплоть до проверочного устройства 18. Дополнительно, тракт 16 транспортировки связывается с модулем 30 совмещения, который описывается ниже. Порт для выдачи формируется в самой нижней части тракта 16 транспортировки. Ящик 27 для сбора посторонних материалов предоставляется на нижней стороне части для выдачи. Посторонний материал, падающий вдоль тракта 16 транспортировки, выдается из порта для выдачи и собирается в ящике 27 для сбора. Как описано выше, ящик 27 для сбора посторонних материалов предоставляется с возможностью извлекаться наружу кожуха 10A посредством открытия второй крышки 120 кожуха 10A.
В основном модуле 10, две части 20a и 20b хранения отбракованных банкнот предоставляются вдоль тракта 16 транспортировки. Помимо этого, множество узлов 22a, 22b, 22c и 22d хранения укладываемых банкнот, содержащих уложенные банкноты, располагаются параллельно. Банкнота P, проходящая через проверочное устройство 18, классифицируется на отбракованную банкноту и обрабатываемую банкноту посредством заслонки (устройства классификации; не проиллюстрировано). Отбракованная банкнота означает банкноту, которая определяется в качестве фальшивой банкноты посредством проверочного устройства 18, или банкноту, которая определяется в качестве неопределимой банкноты вследствие сгиба, разрыва, перекоса и двух перекрывающихся листов. Отбракованная банкнота классифицируется в часть 20a или 20b хранения отбракованных банкнот и укладывается. Части 20a и 20b хранения отбракованных банкнот располагаются в позициях, обращенных к портам 111b для извлечения. Отбракованные банкноты, укладываемые в части 20a или 20b хранения отбракованных банкнот, за исключением фальшивых банкнот, задаются в устройстве 11 подачи снова и вовлекаются снова или подсчитываются в данных вручную. Результат проверки, к примеру, обрабатываемая сумма денег и число банкнот, полученный посредством проверочного устройства 18, отправляется и сохраняется в основном модуле 12 управления и отображается на функциональной панели DP.
Обрабатываемая банкнота означает то, что банкнота P представляет собой подлинную и корректную банкноту или подлинную и поврежденную банкноту в результате определения проверочного устройства 18. Обрабатываемые банкноты задаются и укладываются в узлах 22a-22d хранения укладываемых банкнот. Например, обрабатываемая банкнота классифицируется согласно достоинству банкноты и укладывается в соответствующем одном из узлов 22a-22d хранения укладываемых банкнот. Помимо этого, поврежденные банкноты собираются и укладываются в одном узле хранения укладываемых банкнот. Узлы 22a-22d хранения укладываемых банкнот располагаются в позициях, обращенных к порту 111a для извлечения.
В случае, если используется карта идентификации партий, карта идентификации партий проходит через проверочное устройство 18 и устройство 19 считывания штрих-кодов и отправляется в часть 20a или 20b хранения отбракованных банкнот и укладывается в ней вместе с отбракованной банкнотой.
Главный модуль 10 содержит приводной механизм, который приводит в действие собирающий механизм 14, проверочное устройство 18, транспортировочный механизм и источник питания. Дополнительно, главный модуль 10 содержит множество оптических датчиков S1-S6, которые предоставляются в нескольких местах тракта 16 транспортировки, и оптический датчик S7, который предоставляется в тракте транспортировки в проверочном устройстве 18. Оптические датчики включают в себя светоизлучающее устройство и светоприемное устройство, которое принимает обнаруженный свет, излучаемый из светоизлучающего устройства, и обнаруживает банкноту, проходящую между светоизлучающим устройством и светоприемным устройством. Помимо этого, главный модуль 10 содержит множество оптических датчиков SS1-SS4, которые предоставляются в нескольких местах устройства 11 подачи. Оптические датчики SS1-SS4 обнаруживают то, находится или нет банкнота в устройстве 11 подачи, и обнаруживают то, остаются или нет банкноты во всем устройстве 11 подачи. Дополнительно, главный модуль 10 содержит оптический датчик SS5, который обнаруживает то, имеется или нет посторонний материал в ящике 27 для сбора посторонних материалов. Около оптических датчиков S1-S7 и SS1-SS5, могут предоставляться метки M, например, цветная пломба и отражательная пластина, чтобы указывать позиции для установки этих оптических датчиков. В случае, если метка M предоставляется около оптического датчика, технологический робот CR распознает метку M в качестве знака и может легко обнаруживать позицию для установки оптического датчика. Технологический робот CR может легко позиционировать руку 54 относительно любого из оптических датчиков и цели обработки.
Модуль 30 совмещения содержит тракт 31 транспортировки, который переносит банкноту P, отправленную из главного модуля 10, размещающий механизм 32, который предоставляется на вышерасположенной стороне тракта 31 транспортировки, устройство 34 переворачивания, которое предоставляется на нижерасположенной стороне размещающего механизма 32 вдоль тракта 31 транспортировки, и множество узлов 36a, 36b, 36c и 36d хранения укладываемых банкнот, которые располагаются параллельно вдоль тракта 31 транспортировки. Узлы 36a, 36b, 36c и 36d хранения укладываемых банкнот располагаются в позициях, соответствующих портам 311a для извлечения кожуха 30A. Дополнительно, модуль 30 совмещения содержит множество оптических датчиков S8-S11, которые предоставляются в нескольких местах тракта 31 транспортировки. Оптические датчики включают в себя светоизлучающее устройство и светоприемное устройство, которое принимает обнаруженный свет, излучаемый из светоизлучающего устройства, и обнаруживает банкноту, проходящую между светоизлучающим устройством и светоприемным устройством. Помимо этого, метка M (например, цветная пломба, отражательная пластина) может предоставляться около каждого из оптических датчиков S8-S11, чтобы указывать позиции для установки этих оптических датчиков.
Банкнота P, отправленная из размещающего механизма 32, или совмещенная банкнота P, отправленная из устройства 34 переворачивания, отправляется в укладочный и скрепляющий модуль 40 через тракт 31 транспортировки либо отправляется и укладывается в любом из узлов 36a-36d хранения укладываемых банкнот. Узлы 36a-36d хранения укладываемых банкнот модуля 30 совмещения могут использоваться в качестве узлов хранения укладываемых банкнот, которые укладывают банкноты согласно виду банкнот, либо могут использоваться в качестве блока хранения отбракованных банкнот или блока хранения поврежденных банкнот, который укладывает отбракованные банкноты или поврежденные банкноты, извлеченные из главного модуля 10.
С другой стороны, в случае, если процесс скрепления банкноты задается, корректная банкнота или поврежденная банкнота, извлеченная из главного модуля 10, либо корректная банкнота или поврежденная банкнота, извлеченная из модуля 30 совмещения, отправляется в укладочный и скрепляющий модуль 40 через тракт 31 транспортировки модуля 30 совмещения и укладывается и скрепляется посредством предварительно определенного числа банкнот.
Укладочный и скрепляющий модуль 40 содержит тракт 42 транспортировки, который взаимно блокируется с трактом 31 транспортировки модуля 30 совмещения, первое укладочное устройство 44a и второе укладочное устройство 44b, которые укладывают банкноту, отправленную через тракт 42 транспортировки, посредством предварительно определенного числа банкнот, скрепляющее устройство 48, которое скрепляет пачку банкнот из предварительно определенного числа (например, 100) банкнот, укладываемых посредством этих укладочных устройств, с использованием ленты, и транспортировочный механизм 49, который переносит пачку банкнот, укладываемую посредством первого укладочного устройства 44a, и пачку банкнот, укладываемую посредством второго укладочного устройства 44b, в скрепляющее устройство 48. Дополнительно, предусмотрено устройство выдачи (не проиллюстрировано), которое принимает и укладывает пачку банкнот, скрепленную посредством скрепляющего устройства 48, в нижней стороне скрепляющего устройства 48.
Первое укладочное устройство 44a и второе укладочное устройство 44b располагаются таким образом, что они отклоняются вверх и вниз и вправо и влево. Второе укладочное устройство 44b располагается таким образом, что оно отклоняется в направлении вниз с наклоном, например, приблизительно на 10-80 градусов относительно первого укладочного устройства 44a. Часть второго укладочного устройства 44b перекрывается с первым укладочным устройством 44a в вертикальном направлении. Скрепляющее устройство 48 располагается на нижней стороне второго укладочного устройства 44b. Первое и второе укладочные устройства 44a и 44b включают в себя временные укладочные устройства 45a и 45b и укладочные устройства 46a и 46b с лопастным колесом, которые укладывают предварительно определенное число отправленных банкнот P во временных укладочных устройствах 45a и 45b по одной.
Укладочный и скрепляющий модуль 40 содержит множество оптических датчиков S13 и S14, которые предоставляются в нескольких местах тракта 42 транспортировки. Оптические датчики включают в себя светоизлучающее устройство и светоприемное устройство, который принимает обнаруженный свет, излучаемый из светоизлучающего устройства, и обнаруживает банкноту, проходящую между светоизлучающим устройством и светоприемным устройством. Помимо этого, метка M (например, цветная пломба, отражательная пластина) может предоставляться около каждого из оптических датчиков S13 и S14, чтобы указывать позиции для установки этих оптических датчиков.
Фиг. 12 является блок-схемой, схематично иллюстрирующей конфигурацию устройства обработки листов бумаги и технологического робота. Как проиллюстрировано на фиг. 12, главный модуль 10 устройства 100A обработки листов бумаги содержит главный узел 12 управления, который управляет операциями всего устройства, включающего в себя главный модуль и другие модули. Главный узел (основной контроллер) 12 управления содержит CPU 12a, который управляет операциями соответствующих модулей и вычисляет эффективность работы, запоминающее устройство 12b, которое хранит различные типы данных, управляющие программы и управляющую информацию, и модуль 12c связи, который выполняет обмен данными с технологическим роботом CR. Функциональная панель DP соединяется с главным узлом 12 управления. Множество оптических датчиков S1-S7 и SS1-SS5 соединяются с главным узлом 12 управления и отправляют вывод обнаружения светоприемного устройства в главный узел 12 управления. Главный модуль 10 дополнительно содержит приводной узел 28, который приводит в действие электромотор 26 собирающего механизма 14. Приводной узел 28 управляется посредством главного узла 12 управления. Проверочное устройство 18 соединяется с главным узлом 12 управления и отправляет результат проверки банкноты в главный узел 12 управления.
Модуль 30 совмещения и укладочный и скрепляющий модуль 40 включают в себя субузлы 31a и 41a управления, которые управляют операциями соответствующих модулей. Эти субузлы управления соединяются с главным узлом 12 управления главного модуля 10 посредством интерфейса и кабеля (не проиллюстрирован) посредством LAN. Главный узел 12 управления соединяется с хост-компьютером (не проиллюстрирован), передает информацию относительно хост-компьютера и размещает информацию.
Множество оптических датчиков S8-S12 модуля 30 совмещения соединяются с субузлом 31a управления и отправляют сигнал обнаружения или вывод обнаружения в субузел 31a управления. Узел механизмов, включающий в себя электромотор, соединяется с субузлом 31a управления и управляется посредством субузла 31a управления.
Укладочный и скрепляющий модуль 40 содержит принтер, чтобы выполнять печать на скрепляющей ленте, скрепляющий модуль, укладочное устройство, приводной механизм и оптические датчики S13 и S14. Эти компоненты управляются посредством субузла 41a управления. Помимо этого, каждый из оптических датчиков S13 и S14 отправляет сигнал обнаружения или вывод обнаружения в субузел 41a управления.
Главный узел 12 управления содержит таблицу TB процессов, которая сохраняется в запоминающем устройстве 12b. Как проиллюстрировано на фиг. 13, таблица TB процессов сохраняет содержимое обработки (описание заданий), чтобы командовать технологическому роботу CR, целевую часть обработки, технологический фактор и код обработки в ассоциации друг с другом. Например, таблица TB процессов включает в себя загрузку банкнот, сбор отбракованных банкнот, высвобождение замятия, очистку, сбрасывание посторонних материалов и регулирование зазора подающего механизма в качестве содержимого обработки. Коды 001-011 обработки назначаются соответствующим процессам. Таблица TB процессов сохраняет обрабатывающее устройство A или B, порты A, B и C для выдачи, замятые части A-F, датчики A-F целей очистки, устройство проверки целей очистки, ящик для сбора посторонних материалов и часть для регулирования заглушки в качестве целевых частей каждого процесса. Помимо этого, в качестве технологического фактора, соответствующего содержимому обработки, включены уменьшение числа остающихся банкнот, обнаружение карт идентификации партий, обнаружение замятия, уменьшение выводов датчиков, увеличение коэффициента отбраковки, обнаружение посторонних материалов и увеличение коэффициента замятия.
Главный узел 12 управления обнаруживает рабочее состояние обрабатывающего устройства на основе обнаруженных сигналов из множества оптических датчиков. Затем главный узел 12 управления передает обнаруженную рабочую информацию из модуля 12c связи в технологический робот CR часто или периодически. Фиг. 14 иллюстрирует пример рабочей информации. Рабочая информация включает в себя, например, работу, приостановку, очистку устройства, время работы устройства, обрабатываемую сумму, количество отбракованных банкнот, уложенное количество и количество остающихся банкнот (оставшееся количество) устройства подачи.
С другой стороны, как проиллюстрировано на фиг. 12, технологический робот CR включает в себя CPU 80, который формирует узел управления (контроллер), запоминающее устройство 82, которое сохраняет различные типы управляющей информации и программ процесса, блок 83 механизмов, который включает в себя электромотор, чтобы приводить в действие колесо тележки 50, манипулятор 52 робота и множество электромоторов, чтобы приводить в действие руку 54, приводной узел 84, который приводит в действие блок 83 механизмов, камеру 85, которая служит в качестве электронного глаза, датчик 86 позиции, который предоставляется в тележке 50, и модуль 87 связи, который выполняет обмен данными с устройствами 100A и 100B обработки листов бумаги. CPU 80 соединяется с приводным узлом 84, камерой 85, модулем 87 связи и датчиком 86 позиции и управляет этими компонентами. Помимо этого, CPU 80 имеет функцию обучения данных, сохраненных в запоминающем устройстве 82, чтобы вычислять эффективную операцию обработки.
Согласно системе 1 обработки листов бумаги, сконфигурированной так, как описано выше, главный узел 12 управления устройств 100A и 100B обработки листов бумаги часто обнаруживает рабочее состояние обрабатывающего устройства на основе обнаруженных сигналов из различных типов датчиков и передает различные типы рабочей информации (см. фиг. 14), соответствующей обнаруженному рабочему состоянию, в технологический робот CR часто или периодически. Технологический робот CR принимает передаваемую обработку информации посредством модуля 87 связи и последовательно сохраняет принимаемую рабочую информацию в запоминающем устройстве 82. Помимо этого, в случае, если главный узел 12 управления обрабатывающих устройств 100A и 100B обнаруживает любой из технологических факторов, заданных в таблице TB процессов, на основе обнаруженных сигналов из различных датчиков, главный узел 12 управления выбирает содержимое обработки, целевую часть и код обработки, соответствующие технологическому фактору, из таблицы TB процессов и передает выбранные данные в технологический робот CR в качестве команды обработки обслуживания. При приеме команды обработки, узел управления (CPU 80) технологического робота CR вычисляет оптимальное время для обработки, например, временную зону для меньшего объема обработки в ходе приостановки на основе рабочей информации обрабатывающего устройства. Затем технологический робот CR выполняет содержимое обработки, соответствующий команде обработки, в вычисленное оптимальное время.
Далее приводится описание относительно примеров операции обработки технологического робота CR.
1) Загрузка банкнот
В случае, если обнаруживается уменьшение оставшегося количества банкнот, либо банкноты не обнаруживаются в устройстве 11 подачи во время начала работы устройств 100A и 100B обработки листов бумаги либо в ходе работы, устройство 100A или 100B обработки листов бумаги считывает код 001 обработки и загрузку банкнот из таблицы TB процессов и передает считываемые данные в технологический робот CR в качестве команды обработки. Когда команда обработки принимается, технологический робот CR выбирает оптимальное время загрузки и оптимальное обрабатывающее устройство 100A или 100B на основе рабочей информации обрабатывающего устройства. В оптимальное время загрузки, технологический робот CR приближается к кассете CA для хранения, считывает штрих-код BC, присоединенный к информационной пластине 78 кассеты CA для хранения, посредством электронного глаза (камеры 85) и получает информацию пачки G банкнот, которая сохраняет в кассете CA для хранения. Технологический робот CR выбирает оптимальное число банкнот для устройства обработки листов бумаги и пачку G банкнот для достоинства банкноты на основе полученной информации пачки G банкнот и рабочей информации обрабатывающего устройства. Дополнительно, технологический робот CR выбирает любое из устройства 100A и 100B обработки листов бумаги, которое является подходящим для времени загрузки, на основе рабочей информации.
Затем, как проиллюстрировано на фиг. 8, технологический робот CR перемещает руку 54 в верхнюю сторону секции хранения, в которой хранится выбранная пачка G банкнот. Дополнительно, пачка G банкнот и карта B идентификации партий удерживаются посредством вставки пальца 56 в секцию хранения. Технологический робот CR извлекает секцию хранения в состоянии, в котором пачка G банкнот и карта B идентификации партий удерживаются, и приближается к устройству 11 подачи выбранного устройства 100A или 100B обработки листов бумаги. Дополнительно, технологический робот CR загружает пачку G банкнот и карту B идентификации партий в устройство 11 подачи посредством манипулятора 52 робота и руки 54 при проверке позиции загрузки с использованием камеры 85.
После того, как загрузка завершается, технологический робот CR уведомляет в отношении завершения загрузки в устройства 100A и 100B обработки листов бумаги и сохраняет информацию пачки загруженной банкноты G и предысторию загрузки в запоминающее устройство 82. При этой конфигурации, процесс загрузки завершается.
Дополнительно, технологический робот CR оценивает уменьшение оставшегося количества загруженных банкнот на основе рабочей информации устройства обработки листов бумаги и может выполнять процесс загрузки банкнот заранее на основе собственного определения.
2) Сбор отбракованных банкнот
Когда карта B идентификации партий обнаруживается посредством проверочного устройства 18, и отбракованная банкнота и карта B идентификации партий укладываются в часть 20a хранения отбракованных банкнот, устройства 100A и 100B обработки листов бумаги считывают код 002 обработки, сбор отбракованных банкнот и целевую часть, которые соответствуют карте идентификации партий, из таблицы TB процессов и передают считываемые данные в технологический робот CR в качестве команды обработки. Когда команда обработки принимается, технологический робот CR выбирает оптимальное время процесса на основе рабочей информации устройства обработки листов бумаги. Дополнительно, сбор отбракованных банкнот представляет собой процесс, который может выполняться без остановки устройства обработки листов бумаги. Следовательно, технологический робот CR начинает обработку операции в то время, когда команда обработки принимается.
Технологический робот CR приближается к устройству обработки листов бумаги (цели обработки) и обнаруживает позицию порта 111b для извлечения (порта для отбраковки) (цели обработки) посредством электронного глаза (камеры 85). Затем, технологический робот CR вставляет руку 54 в порт 111b для извлечения посредством манипулятора 52 робота и удерживает отбракованную банкноту и карту B идентификации партий посредством руки 54. Дополнительно, технологический робот CR извлекает руку 54 из порта 111b для извлечения посредством манипулятора 52 робота и собирает отбракованную банкноту и карту B идентификации партий.
Затем, технологический робот CR приближается к предварительно определенному устройству хранения (например, полке для хранения) и размещает отбракованную банкноту и карту идентификации партий, собранные посредством манипулятора 52 робота, на полке для хранения. Следовательно, сбор завершается, и технологический робот CR уведомляет в отношении завершения сбора в устройство обработки листов бумаги и сохраняет собранное количество и предысторию сбора в запоминающем устройстве 82 в качестве управляющей информации.
Дополнительно, секция хранения, пустая в кассете CA для хранения, может использоваться в качестве устройства хранения, которое хранит собранную отбракованную банкноту и собранную карту идентификации партий. Сбор может выполняться таким образом, что отбракованная банкнота и карта идентификации партий, собранные посредством технологического робота CR, загружаются на устройство 11 подачи устройства обработки листов бумаги, и выполняет проверку и подсчет снова посредством устройства обработки листов бумаги.
3) Процесс 1 очистки
В качестве примера операции обработки, описывается процесс очистки, в котором оптические датчики устройств 100A и 100B обработки листов бумаги очищаются посредством технологического робота CR.
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей пример операции очистки. Как проиллюстрировано на фиг. 15, главный узел 12 управления устройства 100A обработки листов бумаги передает рабочую информацию (см. фиг. 14) обрабатывающего устройства в технологический робот CR часто или периодически (SP0). Например, главный узел 12 управления обнаруживает выводы датчиков (сигнал обнаружения из светоприемного устройства) множества оптических датчиков S1-S14 во время прекращения процесса (SP1) и определяет то, превышает или нет вывод датчика предварительно определенное пороговое значение A (SP2). В случае, если обнаруживается оптический датчик, имеющий вывод датчика ниже порогового значения A, главный узел 12 управления определяет то, что оптический датчик является запачканным, и указывает оптический датчик в качестве оптического датчика (целевой части) цели очистки (SP3). Затем, главный узел 12 управления считывает код 005 обработки, очистку, целевую позицию датчика, соответствующие уменьшению выводов датчиков, из таблицы TB процессов и передает считываемые данные в технологический робот CR в качестве команды обработки. Позиция указанного оптического датчика и команда очистки, чтобы очищать оптический датчик, передаются в технологический робот CR (SP4).
При приеме команды очистки (SP5-1), технологический робот CR определяет оптимальное время процесса на основе рабочей информации устройства обработки листов бумаги (SP5-2). Что касается оптимального времени, технологический робот CR двигает тележку 50 таким образом, что она перемещается в позицию, обращенную к оптическому датчику, который представляет собой цель очистки (SP5-3). В случае, если указанный оптический датчик представляет собой оптический датчик в основном модуле 10, например, технологический робот CR перемещается в позицию (близкую позицию), обращенную к крышке 115 главного модуля 10. Затем, технологический робот CR открывает крышку 115 главного модуля 10 (SP6). В это время, как проиллюстрировано на фиг. 16, технологический робот CR сначала подвешивает палец 56 руки 54 над опущенной частью 116 крышки 115. Одновременно, технологический робот CR нажимает кнопку 117 разблокировки посредством одного или двух пальцев 56, чтобы прекращать стопорение крышки 115. Как проиллюстрировано на фиг. 17, технологический робот CR вращает манипулятор 52 робота вверх в этом состоянии таким образом, чтобы открывать крышку 115.
После того, как крышка 115 открыта, технологический робот CR перемещается в место установки устройства B1 нагнетания воздуха и удерживает впрыскивающее сопло 64 посредством руки 54 (SP7). Затем, технологический робот CR перемещается в позицию (близкую позицию), обращенную к главному модулю 10 в состоянии, в котором впрыскивающее сопло 64 удерживается. Технологический робот CR обнаруживает оптический датчик цели обработки посредством электронного глаза (камеры 85) и распознает позицию оптического датчика. В это время, электронный глаз может обнаруживать позицию целевого оптического датчика с использованием метки M в качестве знака. Затем, как проиллюстрировано на фиг. 18, технологический робот CR приводит в действие манипулятор 52 робота и руку 54 и поворачивает впрыскивающее сопло 64 таким образом, что оно обращено к целевому оптическому датчику, и приближает впрыскивающее сопло к оптическому датчику. Затем технологический робот CR выдвигает рычаг впрыскивающего сопла 64 с использованием пальца 56, чтобы нагнетать сжатый воздух к оптическому датчику из впрыскивающего сопла 64. Оптический датчик очищается посредством выдувания сжатого воздуха, чтобы выметать пыль, бумажную пыль и грязь, присоединенные к оптическому датчику (SP8).
В случае, если запачканный оптический датчик (т.е. оптический датчик, для которого вывод датчика ниже порогового значения) обнаруживается, имеется вероятность того, что другие оптические датчики в идентичном модуле запачканного оптического датчика также являются запачканными. Следовательно, после очистки оптического датчика цели обработки, технологический робот CR может очищать другие оптические датчики, позиционированные около оптического датчика, или все другие оптические датчики в основном модуле 10.
Как проиллюстрировано на фиг. 15, после того, как очистка завершается, технологический робот CR уведомляет в отношении завершения очистки в главный узел 12 управления устройства 100A обработки листов бумаги (SP9). Соответственно, главный узел 12 управления обнаруживает вывод датчика для оптического датчика (SP10) и определяет то, превышает или нет вывод датчика предварительно определенное пороговое значение B (>A) (SP11). В случае, если вывод датчика превышает пороговое значение B, главный узел 12 управления определяет то, что оптический датчик нормально очищен, и уведомляет в отношении завершения очистки в технологический робот CR (SP12). При уведомлении в отношении завершения, технологический робот CR закрывает крышку 115 (SP13). После этого, технологический робот CR возвращает впрыскивающее сопло 64 в место установки устройства B1 нагнетания воздуха. Помимо этого, технологический робот CR сохраняет информацию относительно оптического датчика очищенной цели обработки и периода очистки (предыстории очистки) в запоминающем устройстве 82 (SP14).
С другой стороны, в случае, если на SP11 определяется то, что обнаруженный вывод датчика ниже порогового значения B, главный узел 12 управления определяет превышает или нет число очисток предварительно определенное число C (SP15). В случае, если число очисток меньше предварительно определенного числа, главный узел 12 управления передает команду очистки в технологический робот CR снова. Соответственно, технологический робот CR выполняет процессы SP8 и SP9 снова и очищает оптический датчик снова.
Таким образом, очистка повторяется до тех пор, пока вывод датчика для оптического датчика не превысит пороговое значение B, и очистка завершается.
Помимо этого, в случае, если на SP15 определяется, что число очисток превышает предварительно определенное число C, главный узел 12 управления определяет ошибку (SP17) и отображает ошибку на функциональной панели DP (SP18). После этого процесс очистки завершается.
После того, как процесс очистки выполняется несколько раз, CPU 80 технологического робота CR распознает управляющую информацию, сохраненную в запоминающем устройстве 82 (например, оптический датчик цели очистки и время очистки), и может определять оптический датчик, который немного запачкан или оптический датчик, который практически не запачкан. Помимо этого, оптимальное время очистки может вычисляться для каждого оптического датчика. Технологический робот CR может выполнять процесс, который выполняется только для несильно запачканного оптического датчика в модуле во время следующего процесса очистки, на основе вычисленных данных. Альтернативно, технологический робот CR может выполнять процесс, который очищает оптический датчик, заранее до приема команды очистки из устройства обработки листов бумаги на основе оптимального времени очистки. При этой конфигурации, можно повышать эффективность процесса очистки.
Дополнительно, процесс очистки аналогично может выполняться даже для оптического датчика в модуле 30 совмещения и оптического датчика в укладочном и скрепляющем модуле 40.
В процессе очистки, когда сжатый воздух нагнетается в оптический датчик из впрыскивающего сопла, и одновременно окружающий воздух поглощается посредством всасывающего сопла вакуумного устройства, оптический датчик может эффективно очищаться. Другими словами, грязь и пыль, выдуваемые посредством сжатого воздуха, поглощаются посредством всасывающего сопла, так что это позволяет предотвращать присоединение пыли и грязи к оптическому датчику снова.
В случае, если процесс очистки выполняется, два технологических робота CR и CR2, имеющие конфигурацию, идентичную конфигурации вышеописанного технологического робота CR, располагаются так, как проиллюстрировано на фиг. 19. Впрыскивающее сопло 64 может удерживаться посредством одного технологического робота CR, чтобы впрыскивать сжатый воздух к оптическому датчику. Всасывающее сопло 74 может удерживаться посредством другого технологического робота CR2, чтобы поглощать окружающий воздух вокруг оптического датчика посредством всасывающего сопла. Альтернативно, два манипулятора 52 робота могут обычно предоставляться в тележке 50, и рука 54 может предоставляться на конце верхушки каждого манипулятора робота.
4) Процесс 2 очистки
Главный узел 12 управления устройств 100A и 100B обработки листов бумаги подсчитывает число отбракованных банкнот и сохраняет подсчитанное число в запоминающем устройстве 12b. Главный узел 12 управления сравнивает подсчитанное число и предварительно определенное пороговое значение. В случае, если подсчитанное число превышает предварительно определенное пороговое значение, коэффициент отбраковки для банкноты проверочного устройства 18 увеличивается (т.е. определяется то, что проверочное устройство 18 размещено). В этом случае, главный узел 12 управления считывает код 007 обработки, очистку, целевое проверочное устройство, соответствующие увеличению коэффициента отбраковки, из таблицы TB процессов и передает данные в технологический робот CR в качестве команды обработки.
При приеме команды очистки, технологический робот CR определяет оптимальное время процесса на основе рабочей информации обрабатывающего устройства. Что касается времени выполнения, технологический робот CR очищает проверочное устройство 18 посредством процесса, почти идентичного процессу процесса 1 очистки. Другими словами, после открытия крышки 115 главного модуля 10, технологический робот CR обнаруживает проверочное устройство 18 посредством электронного глаза (камеры 85) и распознает позицию проверочного устройства 18. Затем, технологический робот CR нагнетает сжатый воздух к проверочному устройству 18 из впрыскивающего сопла 64. Проверочное устройство 18 очищается посредством выдувания сжатого воздуха, чтобы выметать пыль, бумажную пыль и грязь, присоединенные к проверочному устройству 18. После закрытия крышки 115 технологический робот CR уведомляет в отношении завершения очистки в устройство обработки листов бумаги и хранит предысторию очистки в запоминающее устройство 82 в качестве управляющей информации. Затем процесс очистки технологического робота CR завершается.
5) Процесс сбрасывания посторонних материалов
Фиг. 20, 21 и 22 иллюстрируют операции процесса сбрасывания посторонних материалов технологического робота CR. Когда посторонний материал обнаруживается в ящике 27 для сбора посторонних материалов посредством оптического датчика SS5 главного модуля 10 в любом из устройств 100A и 100B обработки листов бумаги, главный узел 12 управления считывает код 008 обработки, сбрасывание посторонних материалов, целевой ящик для сбора посторонних материалов, соответствующие обнаружению посторонних материалов, из таблицы TB процессов и передает данные в технологический робот CR в качестве команды обработки.
При приеме команды сбрасывания посторонних материалов, технологический робот CR определяет оптимальное время процесса на основе рабочей информации обрабатывающего устройства. Что касается времени выполнения, технологический робот CR перемещается в близкую позицию второй крышки 120 главного модуля 10, как проиллюстрировано на фиг. 20. После перемещения, технологический робот CR подвешивает руку 54 над опущенной частью для сцепления пальцев второй крышки 120 и вращает манипулятор 52 робота. При этой конфигурации, как проиллюстрировано на фиг. 21, технологический робот CR открывает вторую крышку 120 таким образом, что ящик 27 для сбора посторонних материалов может выдвигаться.
Как проиллюстрировано на фиг. 22, далее, технологический робот CR удерживает ящик 27 для сбора посторонних материалов посредством руки 54 и вращает манипулятор 52 робота таким образом, что удерживаемый ящик 27 для сбора посторонних материалов выдвигается из главного модуля 10. Технологический робот CR приближается к произвольному месту для сбрасывания в состоянии, в котором ящик 27 для сбора посторонних материалов удерживается. Затем технологический робот CR переворачивает ящик 27 для сбора посторонних материалов посредством вращения манипулятора 52 робота, с тем чтобы сбрасывать посторонний материал в место для сбрасывания.
После этого, технологический робот CR возвращает ящик 27 для сбора посторонних материалов в позицию, обращенную к главному модулю 10 в удерживаемом состоянии, и вставляет ящик 27 для сбора посторонних материалов в предварительно определенную позицию в основном модуле 10. После вставки, технологический робот CR разблокирует ящик 27 для сбора посторонних и закрывает вторую крышку 120. При этой конфигурации, процесс сбрасывания посторонних материалов завершается. После того, как процесс сбрасывания посторонних материалов завершается, технологический робот CR передает сигнал завершения процесса в главный узел 12 управления устройства 100A обработки листов бумаги. Помимо этого, CPU 80 технологического робота CR сохраняет предысторию обработки сбрасывания посторонних материалов в запоминающем устройстве 82 в качестве управляющей информации.
6) Процесс высвобождения замятия
Главный узел 12 управления устройств 100A и 100B обработки листов бумаги часто обнаруживает выводы оптических датчиков S1-S14, чтобы отслеживать то, что банкнота проходит через тракты 16, 31 и 42 транспортировки. В случае, если главный узел 12 управления обнаруживает то, что банкнота не проходит или остается, согласно выводам оптических датчиков S1-S14, главный узел 12 управления определяет возникновение замятия банкноты. В этом случае, главный узел 12 управления прекращает работу обрабатывающего устройства и отображает замятие и изображение замятой части на функциональной панели DP. Помимо этого, главный узел 12 управления считывает код 003 или 004 обработки, процесс высвобождения замятия и замятую часть, соответствующие обнаружению замятия, из таблицы TB процессов и передает данные в технологический робот CR в качестве команды обработки.
Когда команда обработки принимается, технологический робот CR выбирает оптимальное время процесса на основе рабочей информации устройства обработки листов бумаги. Что касается времени выполнения, технологический робот CR приближается к устройству обработки листов бумаги (например, главному модулю 10), которое командуется в качестве цели обработки, и открывает крышку 115. Затем, технологический робот CR захватывает изображение целевой части обработки посредством электронного глаза (камеры 85) и распознает присутствие/отсутствие замятой банкноты и позицию замятия. После распознавания замятой банкноты, технологический робот CR удерживает замятую банкноту посредством руки 54 и вытаскивает и изымает замятую банкноту из тракта транспортировки. Помимо этого, в случае, если замятую банкноту трудно удерживать, технологический робот CR вращает транспортировочный валик около позиции замятия посредством руки 54 и перемещает замятую банкноту вплоть до позиции, в которой замятая банкнота извлекается. После этого замятая банкнота удерживается посредством руки 54 и вытаскивается и высвобождается из тракта транспортировки.
Технологический робот CR перемещает замятую банкноту в окрестность предварительно определенного блока хранения при удерживании замятой банкноты и перемещает замятую банкноту в блок хранения. После этого, технологический робот CR закрывает крышку 115 главного модуля 10 и завершает процесс высвобождения замятия. Технологический робот CR уведомляет в отношении завершения процесса высвобождения в устройство обработки листов бумаги и сохраняет позицию замятия, число возникновений и предысторию обработки в запоминающем устройстве 82 в качестве управляющей информации.
Помимо этого, в случае, если процесс высвобождения сложно выполнять, когда замятая банкнота распознается, технологический робот CR уведомляет в отношении того, что процесс высвобождения невозможен, в устройство обработки листов бумаги и прекращает операцию обработки. Соответственно, главный узел 12 управления устройства обработки листов бумаги отображает "высвобождение невозможно" и обработку высвобождения, требуемую оператором, на функциональной панели DP и заставляет оператора выполнять процесс высвобождения.
7) Регулирование зазора подающего механизма
При обнаружении того, что банкнота замята, главный узел 12 управления устройств 100A и 100B обработки листов бумаги сохраняет замятую часть и число возникновений в запоминающем устройстве 12b. Главный узел 12 управления часто отслеживает число замятий в каждой позиции. В случае, если число замятий в определенной позиции превышает предварительно определенное пороговое значение, главный узел 12 управления определяет, что коэффициент замятия в этой позиции увеличивается. Когда увеличение коэффициента замятия обнаруживается, главный узел 12 управления считывает код 009 обработки, соответствующий увеличению коэффициента замятия, замятую часть из таблицы TB процессов и регулирование зазора и передает данные в технологический робот CR в качестве команды обработки.
Когда команда обработки принимается, технологический робот CR выбирает оптимальное время процесса на основе рабочей информации устройства обработки листов бумаги. Что касается времени выполнения, технологический робот CR приближается к устройству обработки листов бумаги (например, главному модулю 10), которое командуется в качестве цели обработки, и открывает крышку 115. Затем, технологический робот CR захватывает изображение части для регулирования цели обработки посредством электронного глаза (камеры 85) и распознает регулировочную шкалу (не проиллюстрирована). После этого, технологический робот CR вращает регулировочную шкалу посредством руки 54 и регулирует зазор подающего механизма, например, зазор между транспортировочными ремнями или зазор между транспортировочными направляющими. Величина регулирования задается равной предварительно определенной величине регулирования, которая задается заранее, или величине регулирования, которая указывается из устройства обработки листов бумаги.
После того, как регулирование завершается, технологический робот CR уведомляет в отношении завершения регулирования в устройство обработки листов бумаги после закрытия крышки 115 и сохраняет часть для регулирования и предысторию регулирования в запоминающем устройстве 82 в качестве управляющей информации. Затем процесс регулирования зазора подающего механизма технологического робота CR завершается. Дополнительно, технологический робот CR оценивает увеличение коэффициента замятия на основе рабочей информации устройства обработки листов бумаги и может выполнять регулирование зазора подающего механизма посредством собственного определения.
Помимо вышеописанных процессов, технологический робот CR может выполнять различные типы процессов. Например, банкноты, укладываемые из одного устройства обработки листов бумаги, могут извлекаться посредством технологического робота CR и загружаться на другое устройство обработки листов бумаги.
Помимо этого, главный узел 12 управления устройств 100A и 100B обработки листов бумаги своевременно обнаруживает, например, симптом сбоя устройства и ухудшение производительности на основе выводов датчиков для оптических датчиков. В случае, если симптом сбоя и ухудшение производительности, главный узел 12 управления обнаруживает, например, прогнозирование сбоя на функциональной панели DP, чтобы уведомлять оператора, и передает прогнозирование сбоя в технологический робот CR. Главный узел 12 управления определяет то, кто из оператора (технического специалиста) или технологического робота CR выполняет обслуживание. Соответственно, технический специалист или технологический робот CR может вовремя подавать запасную часть для технического обслуживания в устройства 100A и 100B обработки листов бумаги.
Согласно системе обработки листов бумаги варианта осуществления, сконфигурированного так, как описано выше, различные типы процессов могут автоматически выполняться на устройстве обработки листов бумаги посредством технологического робота таким образом, что может повышаться производительность всей системы. Помимо этого, с помощью функции обучения технологического робота, могут достигаться оптимизация времени процесса и оптимизация цели обработки, и процессы могут выполняться с большей эффективностью.
Фиг. 23 иллюстрирует другую примерную схему размещения множества устройств 100A и 100B обработки листов бумаги в системе 1 обработки листов бумаги. Два устройства 100A и 100B обработки листов бумаги не ограничены случаем, в котором устройства располагаются параллельно в направлении на плоскости, и могут располагаться таким образом, что они перекрываются в направлении высоты. Например, устройство 100A обработки листов бумаги предоставляется на низком столе 200, и устройство обработки листов бумаги предоставляется на высоком столе 210, который располагается таким образом, что он перекрывается для устройства 100А обработки листов бумаги.
При вышеописанной схеме размещения, можно уменьшать пространство для установки системы 1 обработки листов бумаги, сокращать расстояние перемещения технологического робота CR и повышать технологическую эффективность.
Хотя описаны конкретные варианты осуществления, эти варианты осуществления представлены только в качестве примера и не имеют намерение ограничивать объем изобретения. Фактически, новые варианты осуществления, описанные в данном документе, могут быть осуществлены во множестве других форм. Помимо этого, различные пропуски, замены и изменения в форме вариантов осуществления, описанных в данном документе, могут быть осуществлены без отступления от духа изобретения. Прилагаемая формула изобретения и ее эквиваленты имеют намерение охватывать такие формы и модификации как попадающие в пределы объема и сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБРАБОТКИ ЛИСТОВ И СПОСОБ ОБРАБОТКИ ЛИСТОВ | 2016 |
|
RU2682578C2 |
| СИСТЕМА ОБРАБОТКИ ЛИСТОВ | 2015 |
|
RU2697620C2 |
| СИСТЕМА ОБРАБОТКИ ЛИСТОВ И СПОСОБ ОБРАБОТКИ ЛИСТОВ | 2016 |
|
RU2643933C2 |
| УСТРОЙСТВО ОБРАБОТКИ ЛИСТОВ БУМАГИ | 2014 |
|
RU2562791C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛИСТОВ БУМАГИ | 2013 |
|
RU2555802C2 |
| УСТРОЙСТВО И СПОСОБ УКЛАДКИ БАНКНОТ В СТОПУ И СИСТЕМА ДЛЯ УПАКОВКИ БАНКНОТ | 2018 |
|
RU2685834C1 |
| УСТРОЙСТВО ОБРАБОТКИ БУМАЖНЫХ ЛИСТОВ | 2012 |
|
RU2488887C1 |
| СИСТЕМА ОБРАБОТКИ ЛИСТОВ И СПОСОБ ОБРАБОТКИ ЛИСТОВ | 2016 |
|
RU2639113C2 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ БУМАЖНЫХ ЛИСТОВ | 2017 |
|
RU2668325C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛИСТОВ И СПОСОБ ОБРАБОТКИ ЛИСТОВ | 2010 |
|
RU2536636C2 |
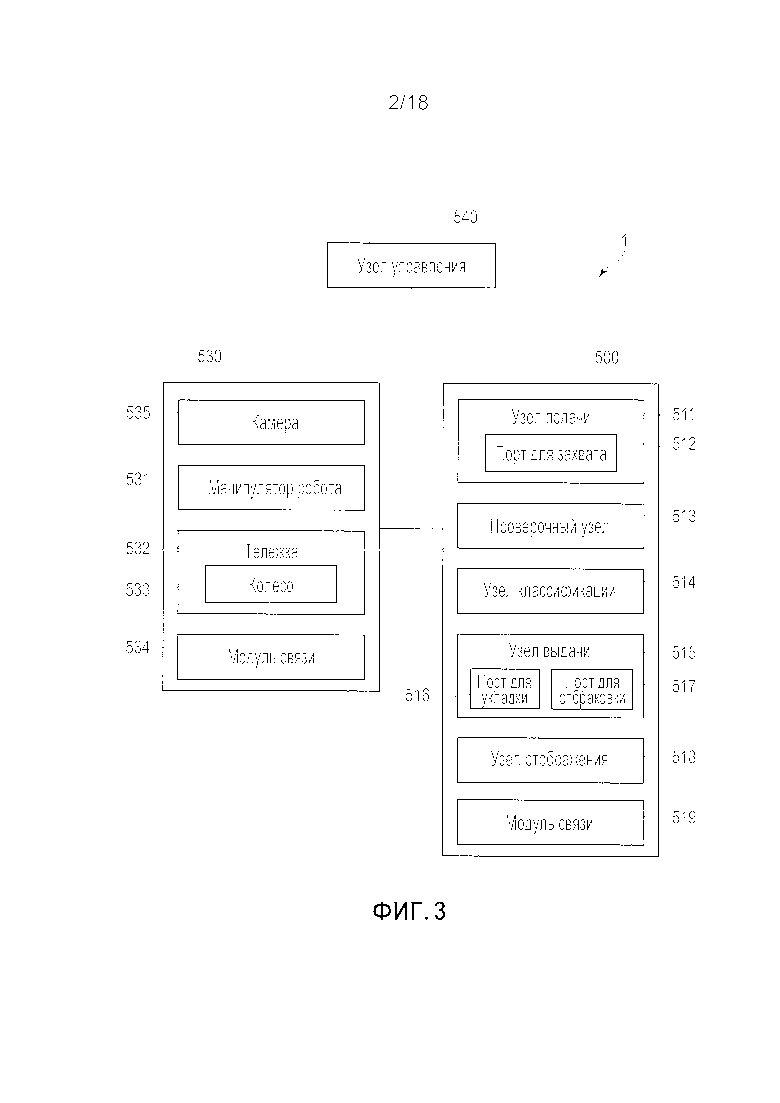
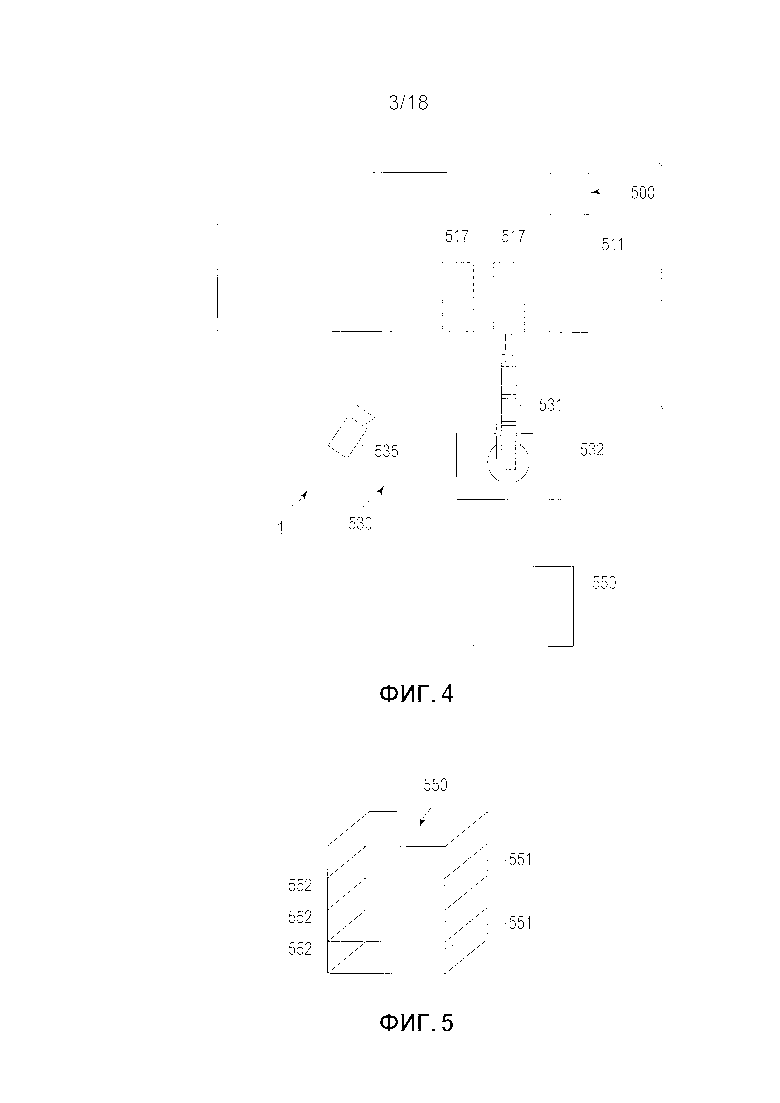
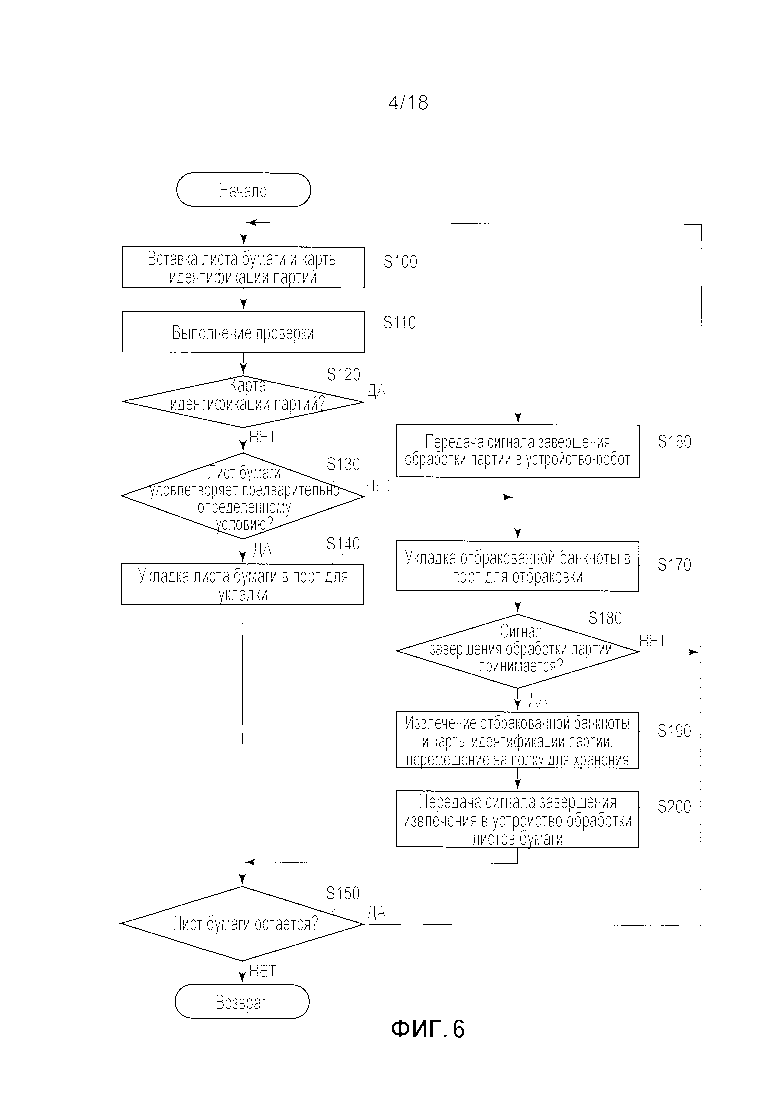
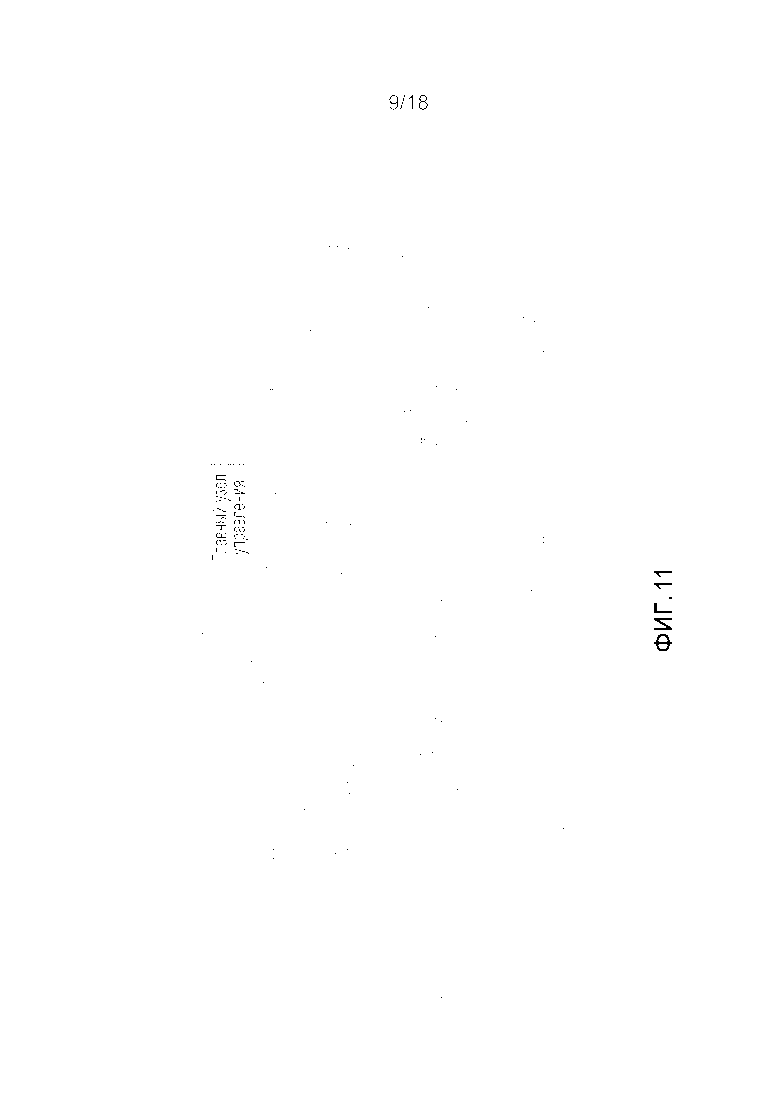
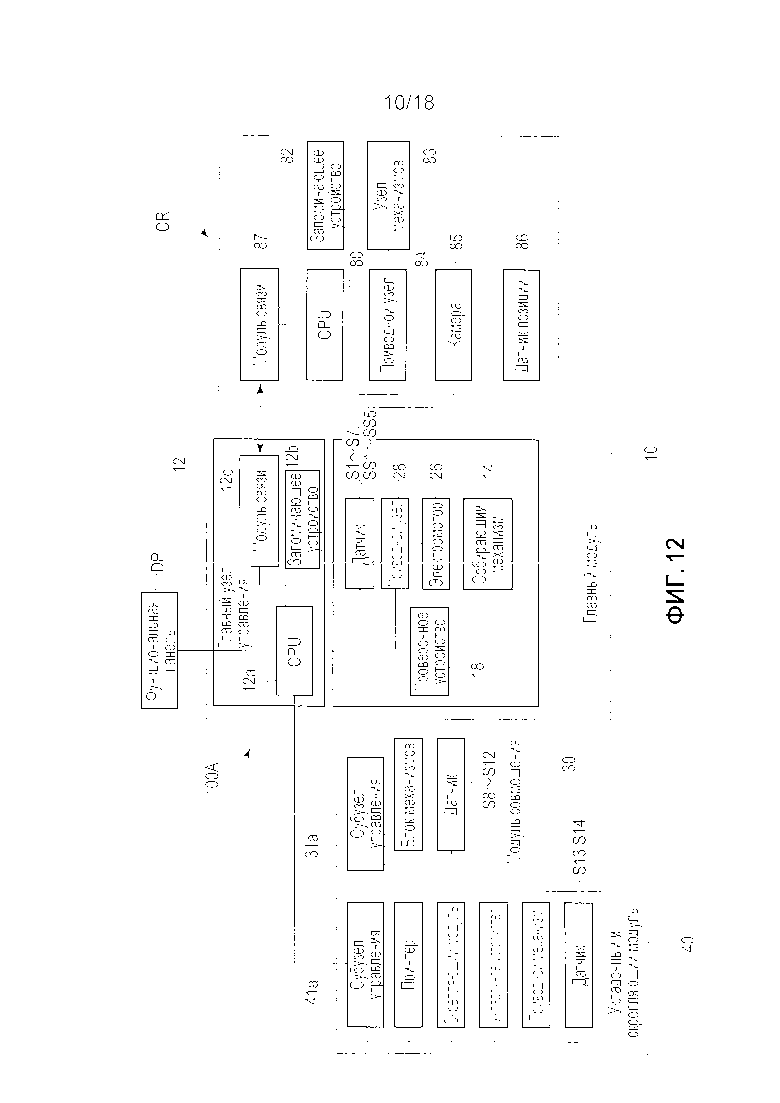
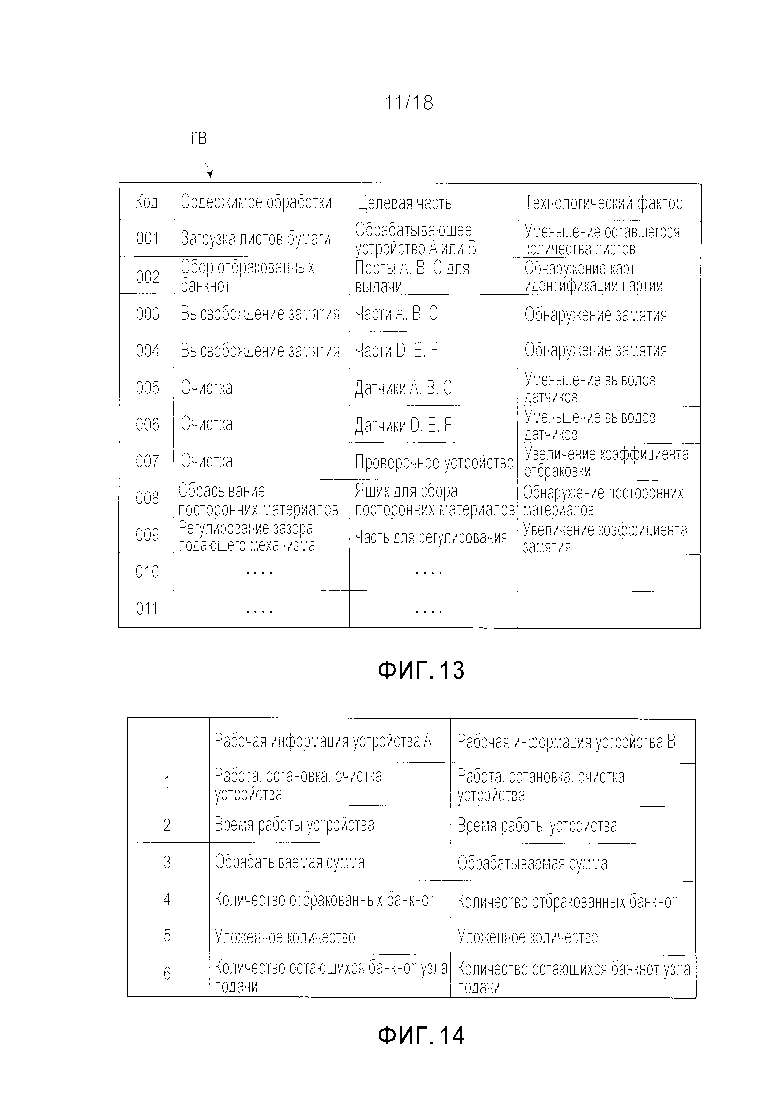
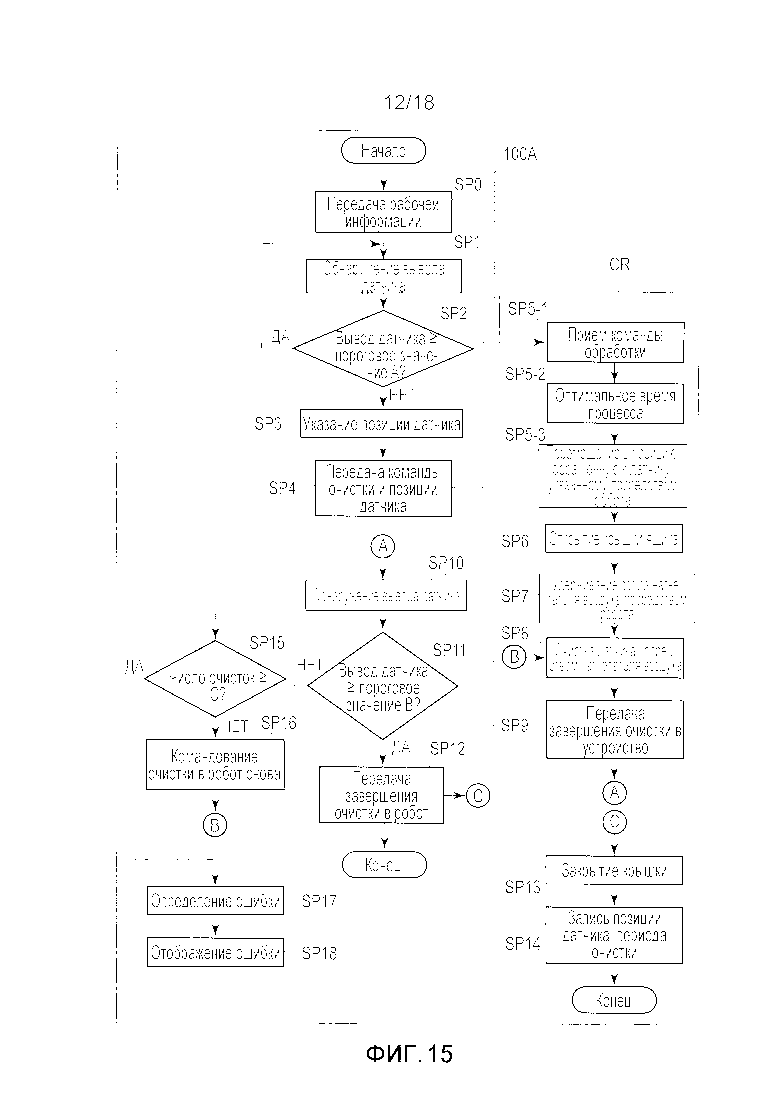
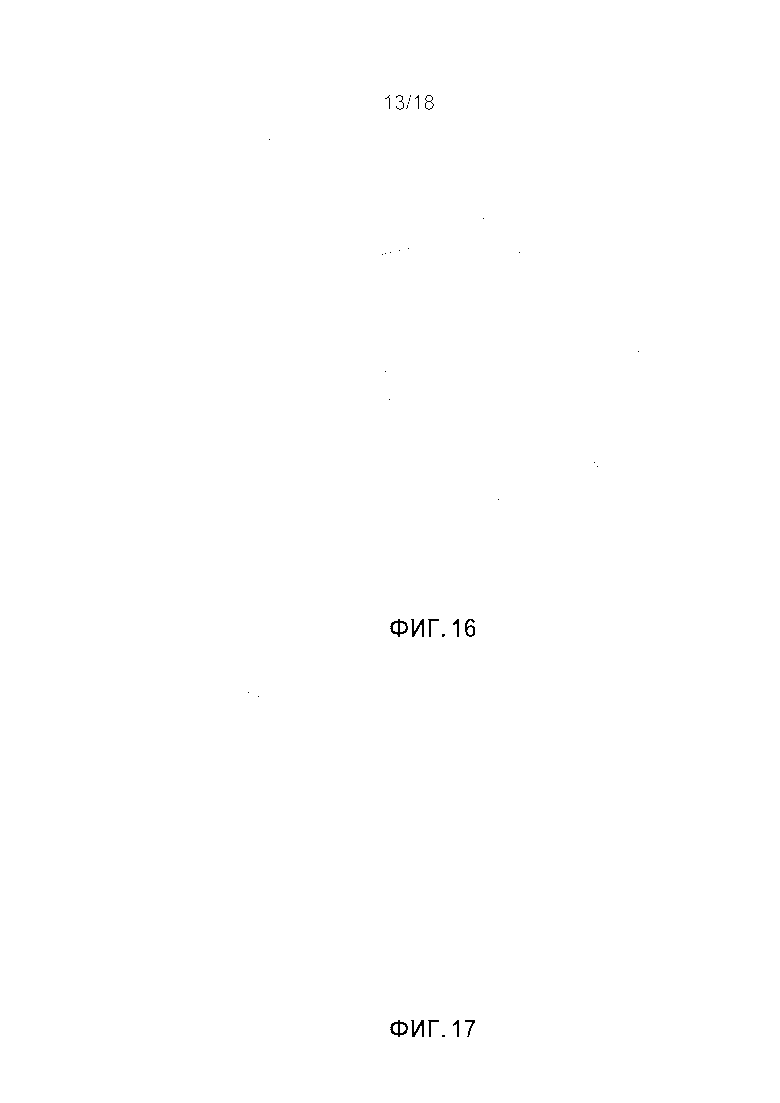
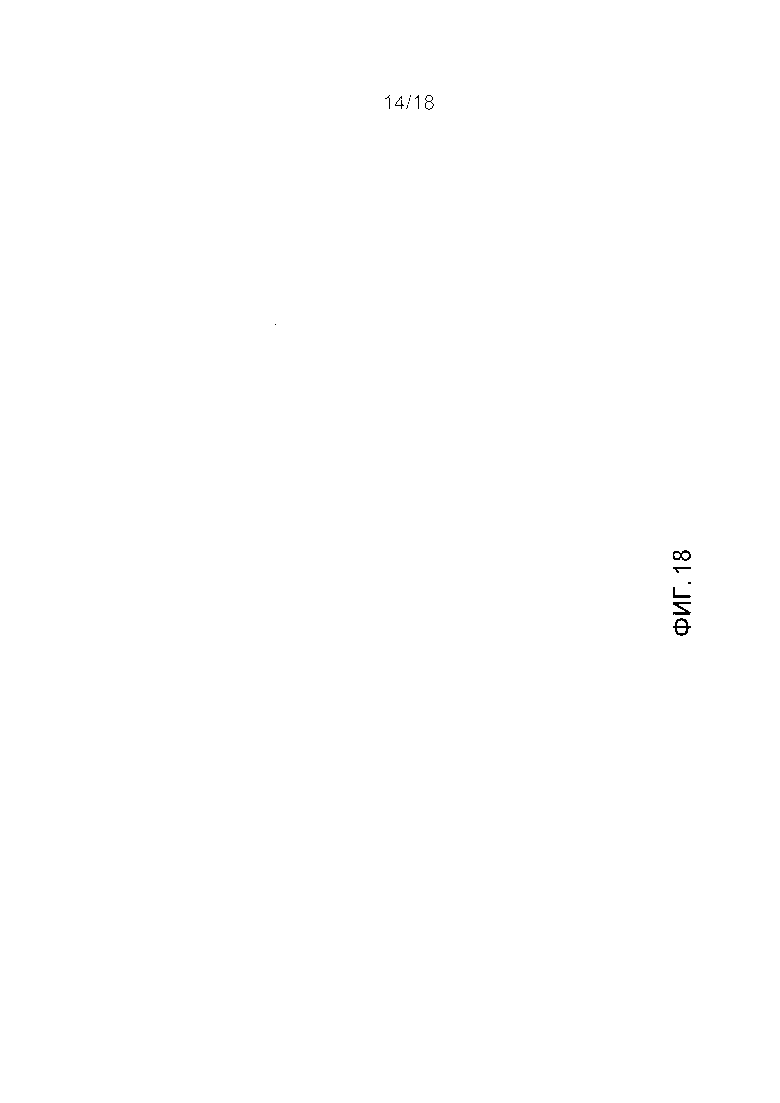
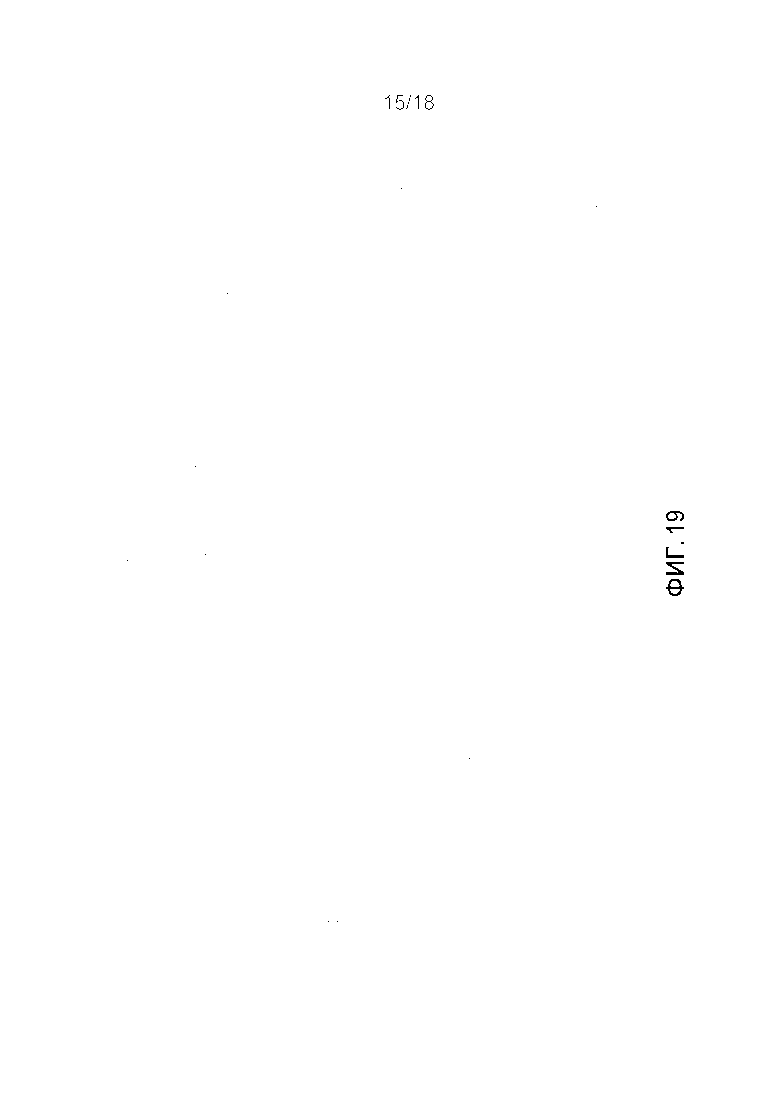
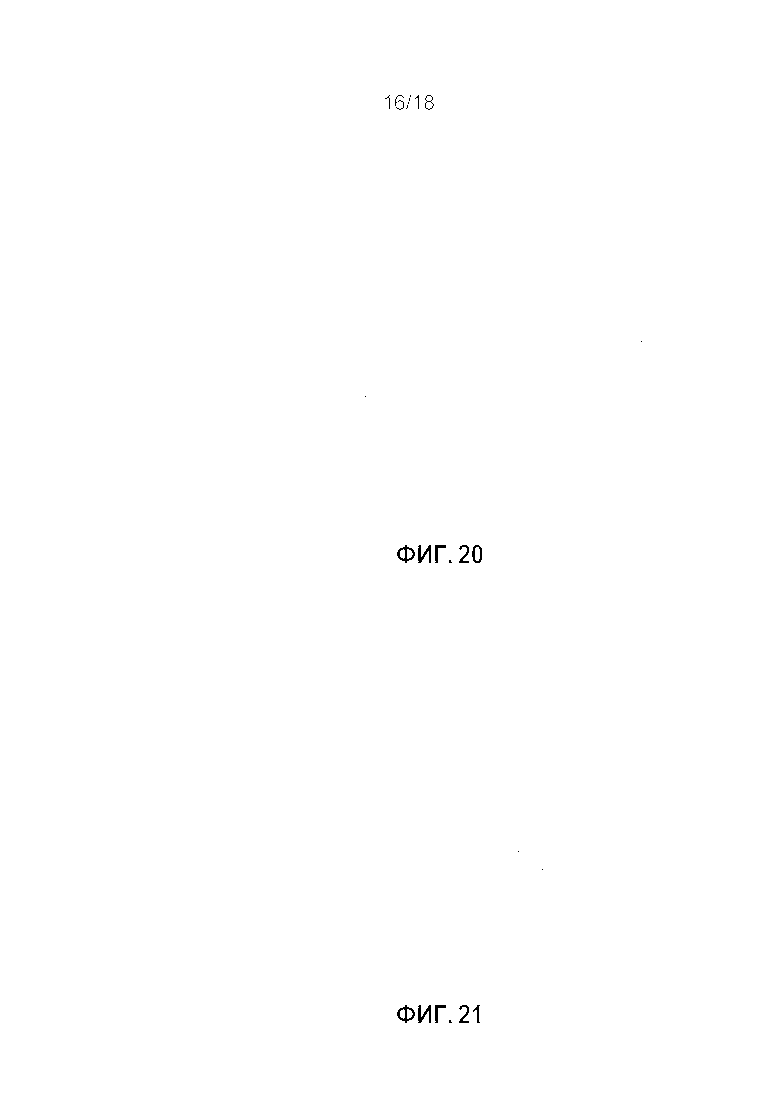
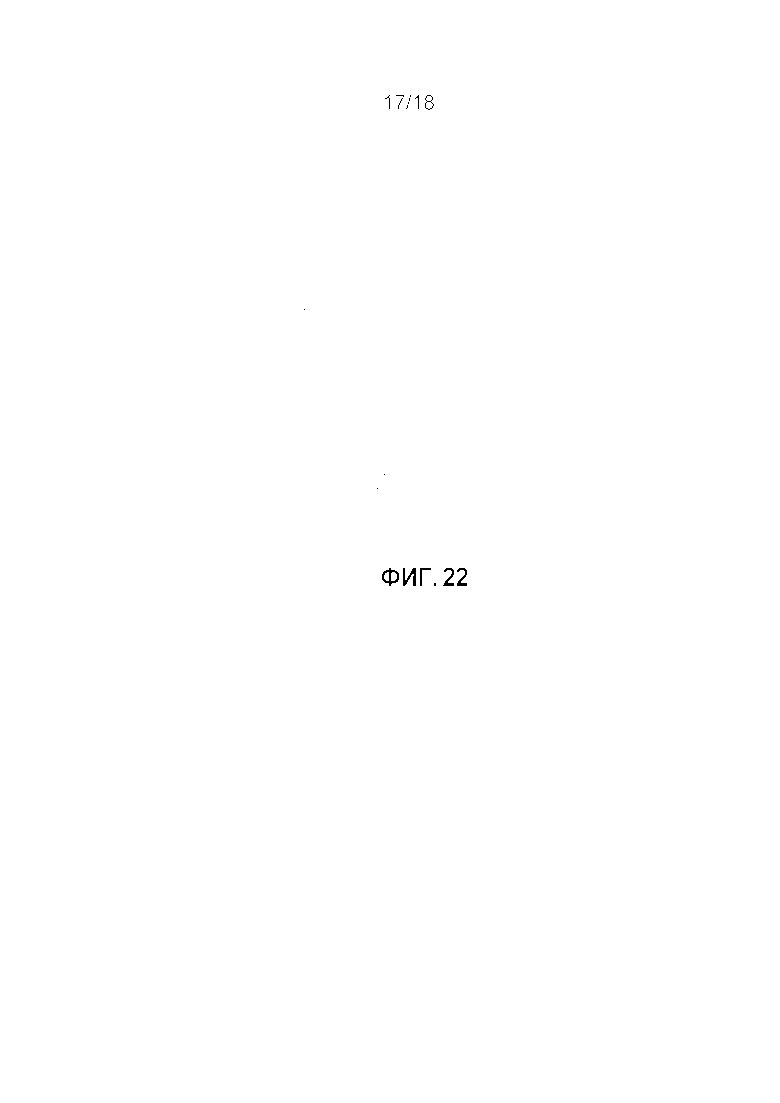
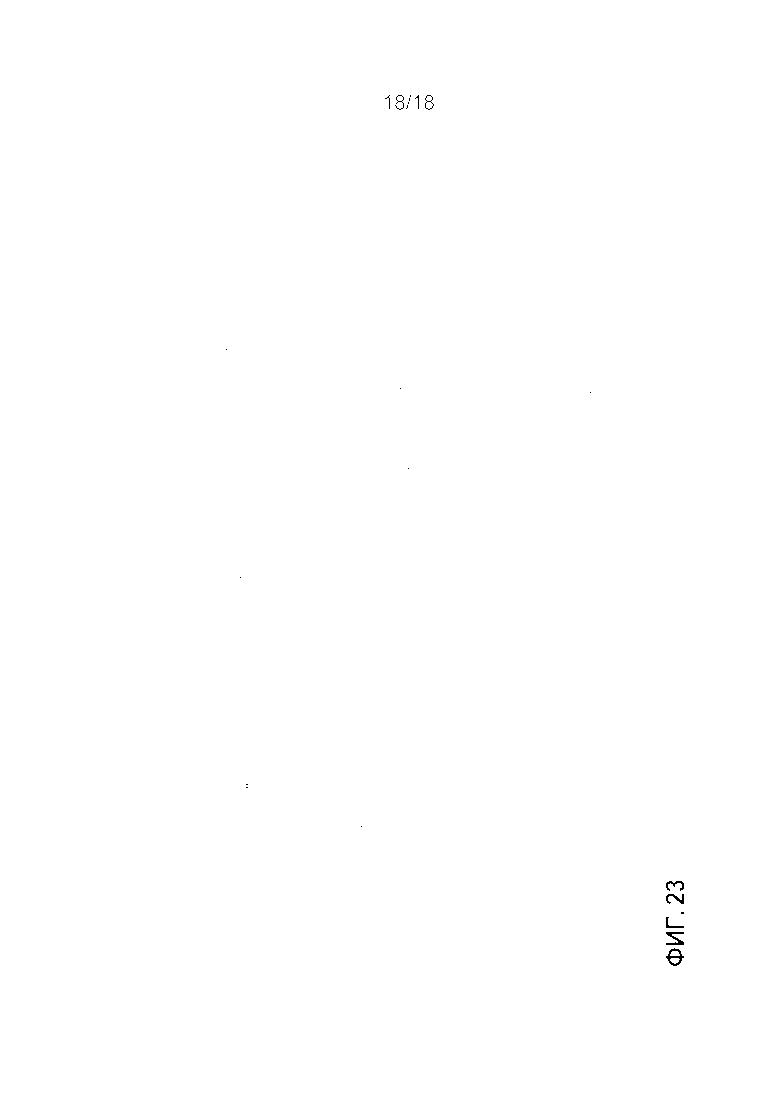
Система обработки листов бумаги включает в себя устройство обработки листов бумаги, которое включает в себя проверочное устройство, устройство отбраковки и первый модуль связи, и устройство-робот, которое включает в себя манипулятор робота и второй модуль связи. Устройство отбраковки выдает отбракованный лист бумаги и карту идентификации партий в порт для отбраковки. Когда карта идентификации партий обнаруживается, первый модуль связи передает предварительно определенный сигнал в устройство-робот. После приема предварительно определенного сигнала устройство-робот извлекает отбракованный лист бумаги и карту идентификации партий из порта для отбраковки посредством манипулятора робота, перемещает их в другой блок хранения и передает сигнал завершения перемещения в устройство обработки листов бумаги. 4 н. и 10 з.п. ф-лы, 23 ил.
1. Система обработки листов бумаги, содержащая:
- устройство (500) обработки листов бумаги и устройство-робот (530),отличающаяся тем, что:
- устройство (500) обработки листов бумаги содержит:
- проверочное устройство (513) для проверки множества входных листов бумаги и карты (B) идентификации партий, вводимой вместе с листами бумаги,
- устройство (515) отбраковки, выполненное с возможностью выдачи карты идентификации партий в порт (517) для отбраковки вместе с отбракованным листом бумаги, не удовлетворяющим предварительно определенному условию в листах бумаги, проверенных посредством проверочного устройства, и
- первый модуль (519) связи, выполненный с возможностью передавать предварительно определенный сигнал, указывающий, что проверка выполняется вплоть до единицы обработки, когда карта идентификации партий обнаруживается посредством проверочного устройства; при этом
- устройство-робот (530) содержит:
- манипулятор (531) робота, который обеспечивает удерживание листа бумаги, и
- второй модуль (534) связи, выполненный с возможностью передавать и принимать сигнал;
- причем устройство-робот выполнено с возможностью, когда второй модуль связи принимает предварительно определенный сигнал, извлечения отбракованного листа бумаги и карты идентификации партий посредством манипулятора робота и перемещения в другой блок (550) хранения и передачи уведомления относительно завершения перемещения отбракованного листа бумаги и карты идентификации партий в устройство обработки листов бумаги из второго модуля связи.
2. Система обработки листов бумаги по п. 1, отличающаяся тем, что устройство-робот (530) выполнено с возможностью складирования пачки отбракованных листов бумаги вместе с картой (B) идентификации партий в блок (550) хранения в каждой партии.
3. Система обработки листов бумаги по п. 1, отличающаяся тем, что устройство-робот (530) выполнено с возможностью извлечения пачки отбракованных листов бумаги и карты (B) идентификации партий из порта (517) для отбраковки и подачи пачки отбракованных листов бумаги и карты идентификации партий в устройство (500) обработки листов бумаги и выполнения проверки снова посредством проверочного устройства (513).
4. Способ обработки листов бумаги посредством системы обработки листов бумаги, которая содержит устройство (500) обработки листов бумаги, которое содержит проверочное устройство (513), выполненное с возможностью проверять листы бумаги, и устройство (515) отбраковки, чтобы выдавать листы бумаги в порт (517) для отбраковки, и устройство-робот (530), содержащее манипулятор робота (537), обеспечивающий удерживание листов бумаги, причем способ отличается тем, что он содержит этапы, на которых:
- последовательно проверяют пачку из множества листов бумаги, вводимых в устройство (500) обработки листов бумаги, и карту (B) идентификации партий в конце пачки по одной посредством проверочного устройства (513);
- определяют лист бумаги, определенный как удовлетворяющий предварительно определенному условию при проверке, в качестве отбракованного листа бумаги;
- выдают отбракованный лист бумаги и карту идентификации партий в порт для отбраковки посредством устройства (515) отбраковки;
- передают предварительно определенный сигнал, указывающий то, что проверка листа бумаги выполняется вплоть до единицы обработки, когда карта идентификации партий обнаруживается;
- извлекают отбракованный лист бумаги и карту идентификации партий из порта для отбраковки посредством устройства-робота (530), когда устройство-робот принимает предварительно определенный сигнал и перемещается в блок хранения; и
- передают сигнал, чтобы уведомлять в отношении завершения перемещения отбракованного листа бумаги, из устройства-робота (530) в устройство обработки листов бумаги.
5. Система обработки листов бумаги, содержащая:
- устройство (100A, 100B) обработки листов бумаги; и
- технологический робот (CR), выполненный с возможностью выполнять произвольный процесс относительно устройства обработки листов бумаги, отличающаяся тем, что:
- устройство (100A, 100B) обработки листов бумаги содержит проверочное устройство (18) для проверки входных листов бумаги, укладочное устройство для укладывания проверенных листов бумаги, транспортировочный механизм для переноса входных листов бумаги на укладочное устройство через проверочное устройство, множество датчиков (S1-S7, SS1-SS5), выполненных с возможностью обнаружения рабочего состояния устройства обработки листов бумаги, первый модуль (12c) связи, выполненный с возможностью передачи и приема данных относительно технологического робота (CR), и контроллер (12), выполненный с возможностью обнаружения рабочего состояния устройства обработки листов бумаги на основе выходных сигналов датчиков, передачи рабочей информации, включающей в себя обнаруженное рабочее состояние, в технологический робот и передачи команды обслуживания целевой части в технологический робот, когда фактор обслуживания обнаруживается на основе выходных сигналов датчиков,
- при этом технологический робот (CR) содержит манипулятор (52) робота, концевой рабочий инструмент (54) на манипуляторе робота, второй модуль (87) связи, выполненный с возможностью передачи и приема данных относительно первого модуля связи, и контроллер (80), который содержит запоминающее устройство (82), в котором сохраняется рабочая информация, передаваемая из устройства обработки листов бумаги, и выполнен с возможностью приведения в действие манипулятора робота и концевого рабочего инструмента, и
- технологический робот (CR) выполнен с возможностью выбора оптимального времени обслуживания для устройства (100A, 100B) обработки листов бумаги на основе рабочей информации, сохраненной в запоминающем устройстве, когда команда обслуживания принимается, и выполнения обслуживания целевой части в оптимальное время обслуживания.
6. Система обработки листов бумаги по п. 5, отличающаяся тем, что устройство (100A, 100B) обработки листов бумаги содержит кожух (10A, 30A, 40A), который содержит открываемую и закрываемую крышку (115, 315, 415), и секцию механизмов, размещенную в кожухе и содержащую проверочное устройство (18), укладочное устройство, транспортировочный механизм и датчики (S1-S7, SS1-SS5), и
- технологический робот (CR) выполнен с возможностью приближаться к целевой части согласно команде обслуживания, передаваемой из устройства (100A, 100B) обработки листов бумаги, открывает крышку посредством манипулятора (52) робота и концевого рабочего инструмента (54) и выполняет процесс для целевой части посредством концевого рабочего инструмента.
7. Система обработки листов бумаги по п. 6, отличающаяся тем, что когда обнаруживается конкретный датчик, имеющий вывод датчика ниже предварительно определенного значения, контроллер (12) устройства (100A, 100B) обработки листов бумаги передает команду очистки конкретного датчика в технологический робот (CR), и
- технологический робот (CR) открывает крышку (115, 315, 415) согласно команде очистки и очищает конкретный датчик посредством концевого рабочего инструмента (54).
8. Система обработки листов бумаги по п. 7, отличающаяся тем, что она дополнительно содержит: устройство (B1) нагнетания воздуха, которое содержит впрыскивающее сопло (64), чтобы впрыскивать воздух, и тем, что технологический робот (CR) выполнен с возможностью удерживать впрыскивающее сопло посредством концевого рабочего инструмента (54) и впрыскивать воздух из впрыскивающего сопла к конкретному датчику.
9. Система обработки листов бумаги по п. 7, отличающаяся тем, что она дополнительно содержит: вакуумное устройство (B2), которое содержит всасывающее сопло (74), чтобы поглощать воздух,
и тем, что
- технологический робот (CR) выполнен с возможностью удерживать всасывающее сопло посредством концевого рабочего инструмента (54) и поглощать воздух вокруг конкретного датчика посредством всасывающего сопла.
10. Система обработки листов бумаги по п. 6, отличающаяся тем, что блок механизмов содержит ящик (27) для сбора, который собирает посторонний материал, и датчик (SS5), который обнаруживает посторонний материал в ящике для сбора,
- кожух содержит вторую крышку (120), которая является открываемой и закрываемой и закрывает ящик для сбора,
- контроллер (12) устройства (100A, 100B) обработки листов бумаги передает команду сбрасывания посторонних материалов в технологический робот (CR), когда посторонний материал обнаруживается посредством датчика, и
- технологический робот (CR) выполнен с возможностью открывать вторую крышку (120) согласно команде сбрасывания посторонних материалов, удерживать ящик (27) для сбора посредством концевого рабочего инструмента (54) и выдвигать ящик для сбора, чтобы сбрасывать посторонний материал в ящике для сбора.
11. Система обработки листов бумаги, содержащая:
- устройство (100A, 100B) обработки листов бумаги; и
- технологический робот (CR), приспособленный для выполнения произвольного процесса для устройства обработки листов бумаги, отличающаяся тем, что:
- устройство (100A, 100B) обработки листов бумаги содержит проверочное устройство (18) для проверки входных листов бумаги, укладочное устройство для укладывания проверенных листов бумаги, транспортировочный механизм для переноса входных листов бумаги на укладочное устройство через проверочное устройство, множество датчиков (S1-S7, SS1-SS5), выполненных с возможностью обнаружения рабочего состояния устройства обработки листов бумаги, контроллер (12), выполненный с возможностью обнаружения рабочего состояния устройства обработки листов бумаги на основе выходных сигналов датчиков, и первый модуль (12c) связи, выполненный с возможностью передавать информацию в технологический робот, отличающаяся тем, что:
- контроллер (12) содержит таблицу (TB) процессов, в которой множество технологических факторов, множество целевых частей обработки и множество видов содержимого обработки ассоциированы друг с другом,
- когда любой из технологических факторов обнаруживается на основе выходных сигналов датчиков, контроллер (12) выполнен с возможностью считывания целевой части обработки и содержимого обработки, соответствующих обнаруженному технологическому фактору, из таблицы процессов, и передачи целевой части обработки считывания и содержимого обработки считывания в технологический робот в качестве команды обработки, и
- технологический робот (CR) содержит манипулятор (52) робота, второй модуль (87) связи, который выполнен с возможностью переноса информации обработки между первым модулем связи, концевым рабочим инструментом (54) на манипуляторе робота и контроллером (80), который предназначен для приведения в действие манипулятора робота и концевого рабочего инструмента, при этом:
- технологический робот (CR) выполнен с возможностью выполнения процесса для обработки целевой части согласно команде обработки, передаваемой из устройства обработки листов бумаги.
12. Система обработки листов бумаги по п. 11, отличающаяся тем, что таблица (TB) процессов включает в себя уменьшение оставшегося количества листов, обнаружение карт идентификации партий, обнаружение замятия, уменьшение выводов датчиков, увеличение коэффициента отбраковки, обнаружение посторонних материалов и увеличение коэффициента замятия в качестве технологического фактора,
- таблица (TB) процессов включает в себя устройство обработки листов бумаги, порт для выдачи, замятую часть, датчики, проверочное устройство, ящик для сбора посторонних материалов и часть для регулирования в качестве целевой части обработки, соответствующей технологическому фактору, и
- таблица (TB) процессов включает в себя загрузку листов бумаги, сбор отбракованных листов бумаги, высвобождение замятия, очистку, сбрасывание посторонних материалов и регулирование зазора в качестве содержимого обработки, соответствующего технологическому фактору.
13. Система обработки листов бумаги по п. 12, отличающаяся тем, что она дополнительно содержит кассету (CA) для хранения, которая хранит множество пачек листов бумаги, каждая из которых включает в себя множество листов бумаги и карту идентификации партий,
и тем, что
- устройство (100A, 100B) обработки листов бумаги содержит устройство (11) подачи, который загружает пачку листов бумаги, и собирающий механизм (14), который извлекает листы бумаги по одному из устройства подачи, чтобы доставлять извлеченные листы бумаги в проверочное устройство,
- когда уменьшение оставшегося количества листов в устройстве (11) подачи обнаруживается, контроллер (12) устройства обработки листов бумаги считывает процесс загрузки листов бумаги, соответствующий уменьшению оставшегося количества листов, из таблицы (TB) процессов и передает команду загрузки листов бумаги в технологический робот вместе с целевой частью, и
- технологический робот (CR) извлекает пачку листов бумаги и карту идентификации партий из кассеты (CA) для хранения посредством манипулятора робота и концевого рабочего инструмента (54) согласно команде загрузки листов бумаги и загружает пачку листов бумаги и карту идентификации партий в устройство (11) подачи.
14. Система обработки листов бумаги по п. 13, отличающаяся тем, что кассета (CA) для хранения содержит информационную часть (78), которая отображает информацию относительно хранимых пачек листов бумаги,
- технологический робот (CR) содержит электронный глаз (85), и
- в процессе загрузки листов бумаги, технологический робот считывает информацию, отображаемую в информационной части (78) кассеты (CA) для хранения, посредством электронного глаза, выбирает пачку листов бумаги, которая является оптимальной для устройства (100A, 100B) обработки листов бумаги, на основе считываемой информации, извлекает выбранную пачку листов бумаги из кассеты для хранения посредством манипулятора робота и концевого рабочего инструмента (54) и загружает выбранную пачку листов бумаги в устройство обработки листов бумаги.
| WO 2009106355 A1, 03.09.2009 | |||
| WO 2005096233 A2, 13.10.2005 | |||
| GB 2000487 A, 10.01.1979. |

