Область техники, к которой относится изобретение
Варианты осуществления, описанные ниже, относятся к вибрационным датчикам и, более конкретно, к обмену данными с двумя или более подчиненными устройствами.
Уровень техники
Вибрационные датчики, такие как, например, вибрационные плотномеры и расходомеры Кориолиса, в целом, известны и используются, чтобы измерять массовый расход и другую информацию, относящуюся к веществам, протекающим через трубу в расходомере. Примерные расходомеры Кориолиса раскрываются в патенте США 4,109,524, патенте США 4,491,025 и Re. 31,450. Эти расходомеры имеют измерительные узлы с одной или более трубами прямой или изогнутой конфигурации. Конфигурация каждой трубы в кориолисовом массовом расходомере, например, имеет множество режимов свободных колебаний, которые могут иметь тип простого изгиба, торсионный или соединенный тип. Каждая труба может приводиться в колебание в предпочтительном режиме. Когда нет потока через расходомер, возбуждающая сила, прикладываемая к трубе(ам), вынуждает все точки вдоль трубы(труб) колебаться с идентичной фазой или с небольшим "смещением нуля", которое является временной задержкой, измеренной при нулевом расходе.
Когда вещество начинает протекать через трубу(ы), кориолисовы силы вынуждают каждую точку вдоль трубы(труб) иметь разную фазу. Например, фаза на впускном конце расходомера отстает от фазы в централизованной позиции возбуждающего механизма, в то время как фаза на выпуске опережает фазу в централизованной позиции возбуждающего механизма. Тензодатчики на трубе(ах) формируют синусоидальные сигналы, характерные для перемещения трубы(труб). Сигналы, выводимые из тензодатчиков, обрабатываются, чтобы определять временную задержку между тензодатчиками. Временная задержка между двумя или более тензодатчиками пропорциональна массовому расходу вещества, протекающего через трубу(ы).
Измерительная электронная аппаратура, соединенная с возбуждающим механизмом, формирует возбуждающий сигнал, чтобы управлять возбуждающим механизмом, а также определять массовый расход и/или другие свойства вещества процесса из сигналов, принимаемых от тензодатчиков. Возбуждающий механизм может содержать одну из многих хорошо известных конфигураций; однако, магнит и встречно-включенная катушка возбуждения успешно применяются в отрасли расходомеров. Переменный ток передается катушке возбуждения для вибрирования трубы(труб) с желаемой амплитудой и частотой трубы. Также известно в технике предоставление тензодатчиков в качестве конфигурации магнита и катушки, очень похожей на конфигурацию возбуждающего механизма.
Многие системы используют два или более измерительных узла вследствие различных ограничений конструкции. Например, измерительные узлы, используемые в распределении сжиженного природного газа (LNG) LNG-транспортным средствам, могут использовать первый измерительный узел, чтобы измерять топливо, перекачиваемое из бака для хранения LNG в LNG-транспортное средство. Второй измерительный узел может быть использован, чтобы измерять топливо, которое возвращается в LNG-бак. Топливо, возвращаемое в LNG-бак, может иметь другой расход, температуру, состояние и т.д. Хост может получать информацию от первого и второго измерительного узла по шине "главный-подчиненный", где хост является главным устройством, а первый и второй измерительный узлы являются подчиненными устройствами. Соответственно, существует необходимость обмена данными с двумя или более подчиненными устройствами.
Сущность изобретения
Предложен способ обмена данными с двумя или более подчиненными устройствами. Согласно варианту осуществления способ содержит прием командного пакета с помощью интерфейса, при этом командный пакет отправляется главным устройством по шине "главный-подчиненный", и связывание адреса подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом.
Предложен интерфейс для связи с двумя или более подчиненными устройствами. Согласно варианту осуществления интерфейс содержит процессор, сконфигурированный соединяться с возможностью обмена данными с двумя или более подчиненными устройствами, и порт связи, соединенный с возможностью обмена данными с процессором. Порт связи выполнен с возможностью соединяться с возможностью обмена данными с шиной "главный-подчиненный". Процессор выполнен с возможностью принимать командный пакет от главного устройства по шине "главный-подчиненный" и связывать адрес подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств.
Предложена система для обмена данными с двумя или более подчиненными устройствами. Согласно варианту осуществления система содержит интерфейс, соединенный с возможностью обмена данными с главным устройством по шине "главный-подчиненный", и два или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом. Интерфейс выполнен с возможностью принимать командный пакет от главного устройства по шине "главный-подчиненный" и связывать адрес подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств.
Аспекты
Согласно аспекту, способ связи с двумя или более подчиненными устройствами содержит прием командного пакета с помощью интерфейса, при этом командный пакет отправляется главным устройством по шине "главный-подчиненный", и связывание адреса подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом.
Предпочтительно, прием командного пакета с помощью интерфейса содержит прием командного пакета с помощью порта, соединенного с возможностью обмена данными с шиной "главный-подчиненный", и определение того, соответствует ли адрес подчиненного устройства по меньшей мере одному из двух или более подчиненных устройств.
Предпочтительно, связывание адреса подчиненного устройства с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом, содержит связывание адреса подчиненного устройства с одним из двух или более массивов, при этом каждый из двух или более массивов связан с каждым из двух или более подчиненных устройств.
Предпочтительно, связывание адреса подчиненного устройства с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом, содержит извлечение, посредством анализа (разбора), адреса подчиненного устройства из командного пакета и сравнение извлеченного адреса подчиненного устройства с двумя или более группами адресов, при этом каждая из двух или более групп адресов связана с каждым из двух или более подчиненных устройств.
Предпочтительно, способ дополнительно содержит этап, на котором отвечают на командный пакет посредством передачи ответного пакета с данными, полученными от одного из двух или более подчиненных устройств, которое связано с адресом подчиненного устройства в командном пакете.
Предпочтительно, ответный пакет передается через порт, соединенный с возможностью обмена данными с шиной "главный-подчиненный".
Согласно аспекту, интерфейс (100) для обмена данными с двумя или более подчиненными устройствами содержит процессор (110), сконфигурированный соединяться с возможностью обмена данными с двумя или более подчиненными устройствами (10a, 10b), и порт (140) связи, соединенный с возможностью обмена данными с процессором (110), при этом порт (140) связи приспособлен соединяться с возможностью обмена данными с шиной (50) "главный-подчиненный". Процессор (110) выполнен с возможностью принимать командный пакет (500a, 500b) от главного устройства (40) по шине (50) "главный-подчиненный" и связывать адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) с одним из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, процессор (110), будучи выполненным с возможностью принимать командный пакет (500a, 500b), выполнен с возможностью принимать командный пакет (500a, 500b) с помощью порта (140) связи, соединенного с возможностью обмена данными с шиной (50) "главный-подчиненный", и определять, соответствует ли адрес (502a, 502b) подчиненного устройства по меньшей мере одному из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, процессор (110), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более массивов (104a, 104b), при этом каждый из двух или более массивов (104a, 104b) связан с каждым из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, процессор (110), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью извлекать посредством анализа адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) и сравнивать извлеченный адрес (502a, 502b) подчиненного устройства с двумя или более группами (102a, 102b) адресов, при этом каждая из двух или более групп (102a, 102b) адресов связана с каждым из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, процессор (110) дополнительно выполнен с возможностью отвечать на командный пакет (500a, 500b), передавая ответный пакет с данными, полученными от одного из двух или более подчиненных устройств (10a, 10b), которое связано с адресом (502a, 502b) подчиненного устройства в командном пакете (500a, 500b).
Предпочтительно, ответный пакет передается через порт (140) связи, соединенный с возможностью обмена данными с шиной (50) "главный-подчиненный".
Согласно аспекту, система (5) для обмена данными с двумя или более подчиненными устройствами содержит интерфейс (100), соединенный с возможностью обмена данными с главным устройством (40) по шине (50) "главный-подчиненный", и два или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100). Интерфейс (100) выполнен с возможностью принимать командный пакет (500a, 500b) от главного устройства (40) по шине (50) "главный-подчиненный" и связывать адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) с одним из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, интерфейс (100), будучи выполненным с возможностью принимать командный пакет (500a, 500b), выполнен с возможностью принимать командный пакет (500a, 500b) с помощью порта (140) связи, соединенного с возможностью обмена данными с шиной (50) "главный-подчиненный", и определять, соответствует ли адрес (502a, 502b) подчиненного устройства по меньшей мере одному из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, интерфейс (100), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более массивов (104a, 104b), при этом каждый из двух или более массивов (104a, 104b) связан с каждым из двух или более подчиненных устройств (10a, 10b).
Предпочтительно, интерфейс (100), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью извлекать посредством анализа адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) и сравнивать извлеченный адрес (502a, 502b) подчиненного устройства с двумя или более группами (102a, 102b) адресов, при этом каждая из двух или более групп (102a, 102b) адресов связана с каждым из двух или более подчиненных устройств (10a, 10b).
Краткое описание чертежей
Один и тот же ссылочный номер представляет один и тот же элемент на всех чертежах. Должно быть понятно, что чертежи необязательно начерчены в масштабе.
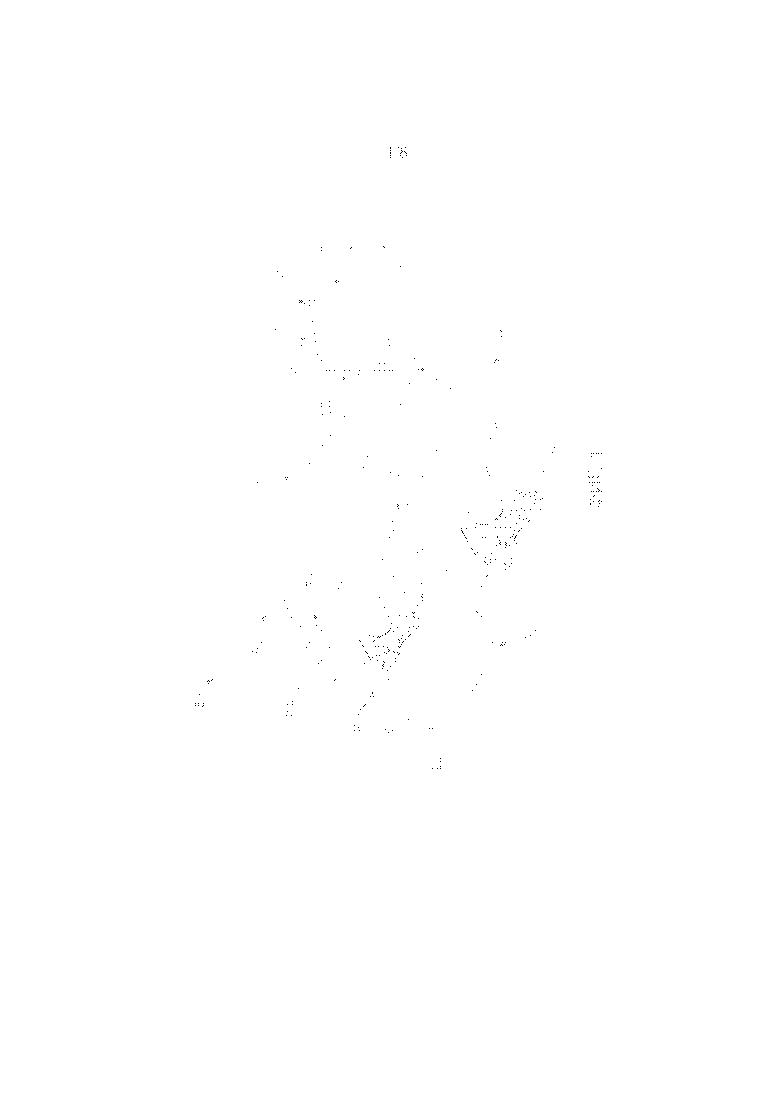
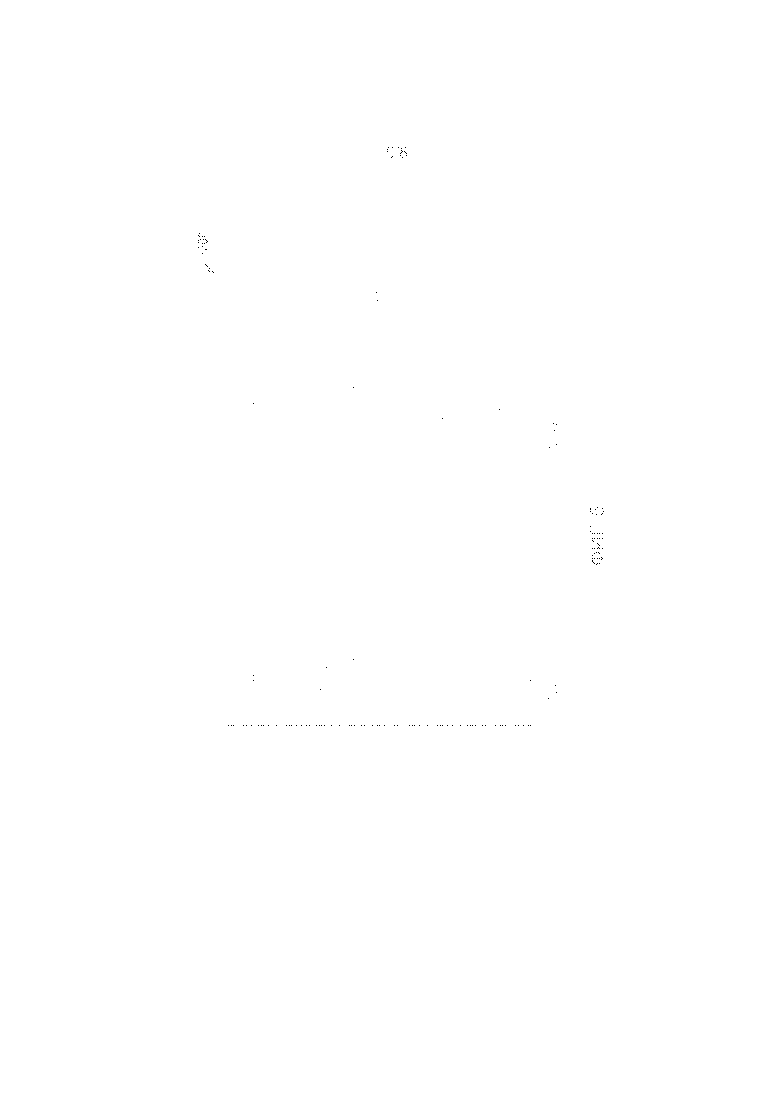
Фиг. 1 показывает систему 5, которая включает в себя интерфейс 100 для обмена данными с двумя или более подчиненными устройствами.
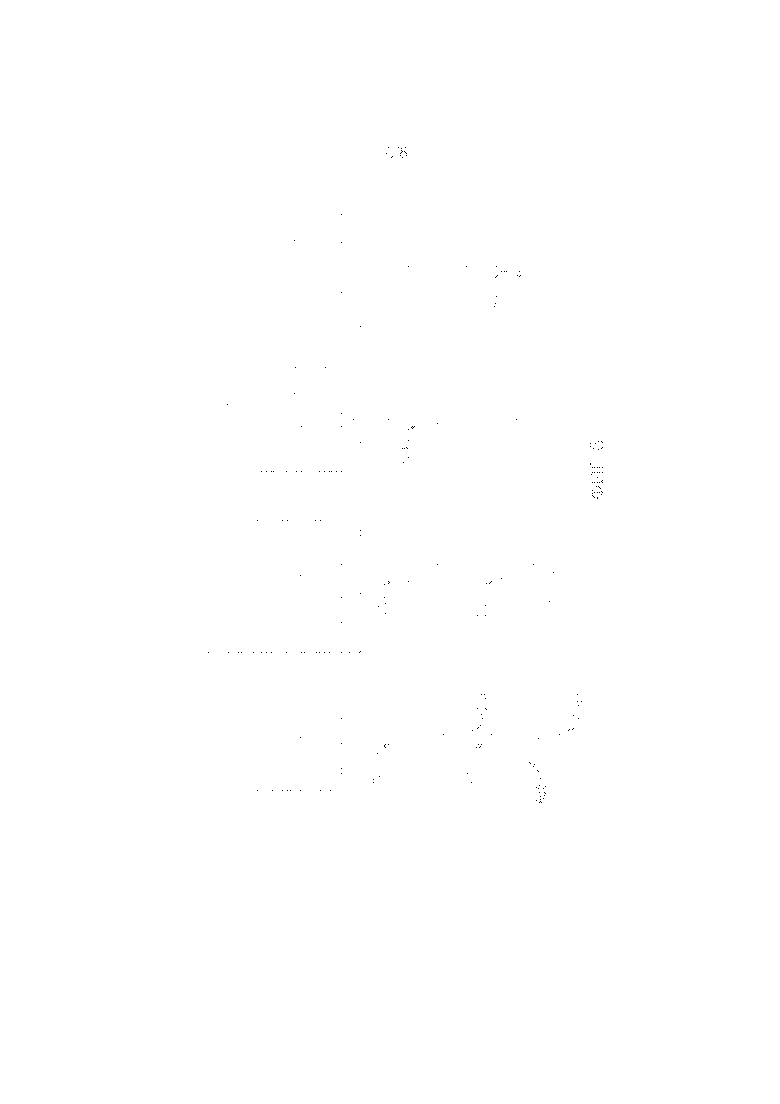
Фиг. 2 показывает систему 5, которая включает в себя интерфейс 100 для обмена данными с двумя или более подчиненными устройствами.
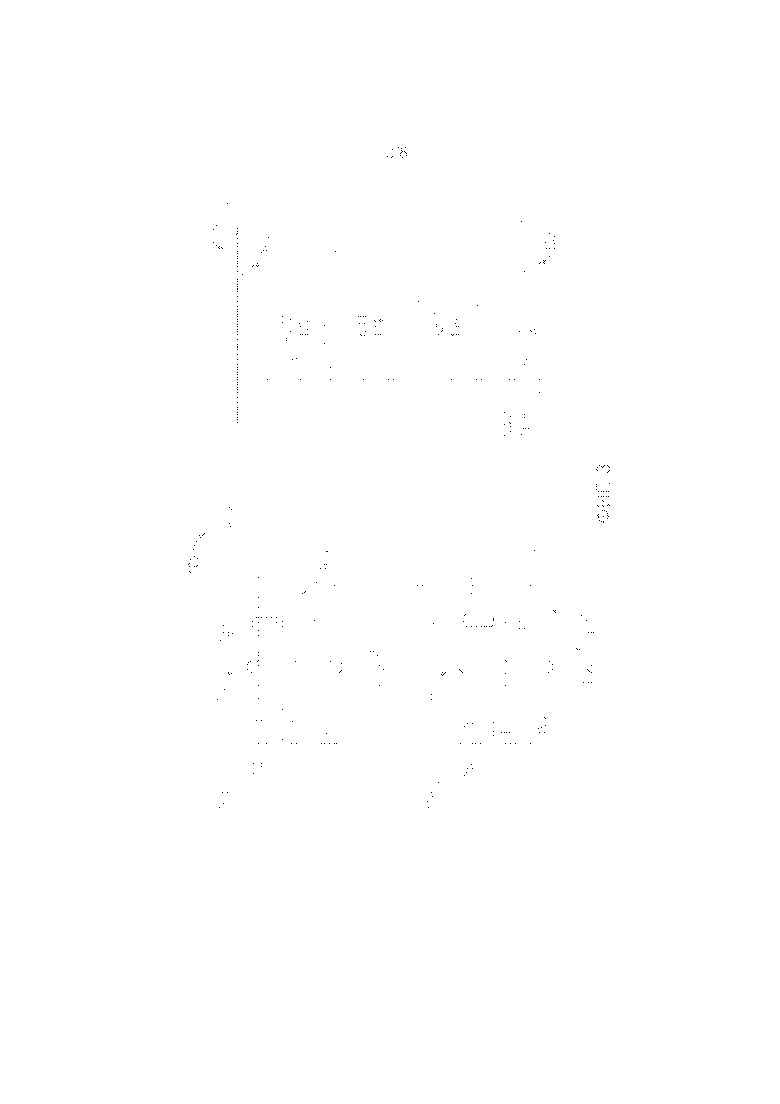
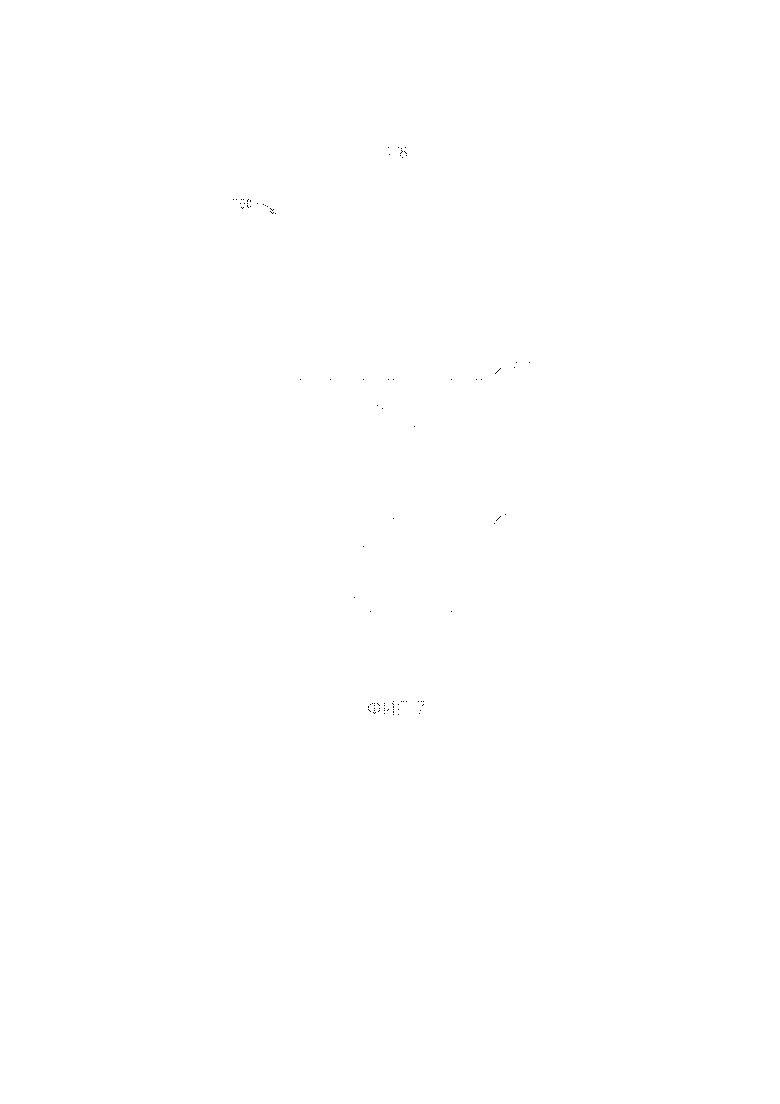
Фиг. 3 показывает блок-схему интерфейса 100.
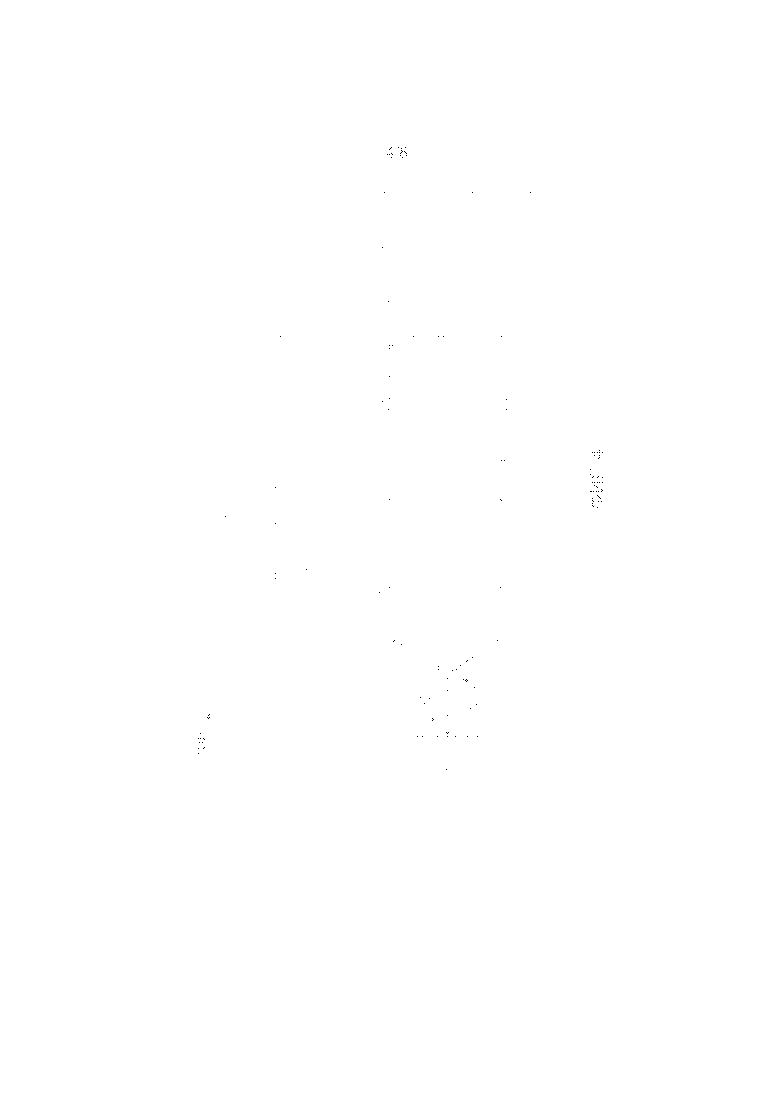
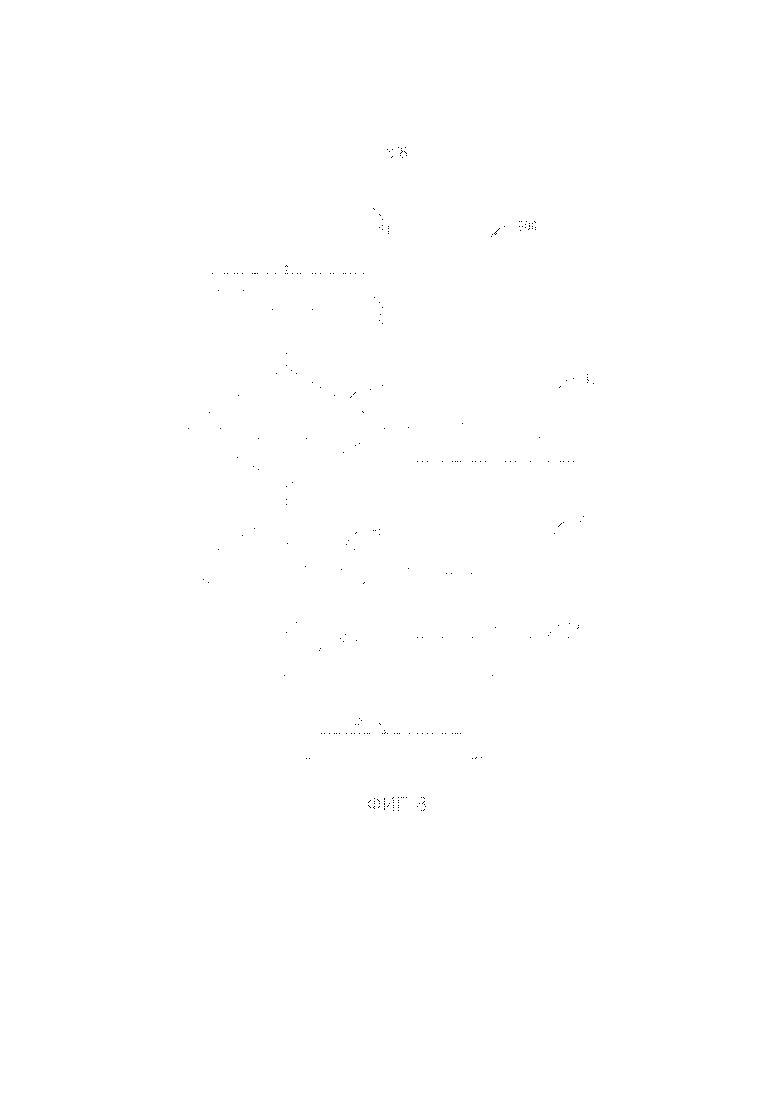
Фиг. 4 показывает другой вид интерфейса 100 для обмена данными с двумя или более подчиненными устройствами.
Фиг. 5 показывает два или более командных пакетов 500, используемых для обмена данными с двумя или более подчиненными устройствами.
Фиг. 6 показывает два или более пакетных процессов 600, используемых для обмена данными с двумя или более подчиненными устройствами.
Фиг. 7 показывает способ 700 для обмена данными с двумя или более подчиненными устройствами.
Фиг. 8 показывает другой способ 800 для обмена данными с двумя или более подчиненными устройствами.
Подробное описание изобретения
Фиг. 1-8 и последующее описание изображают конкретные примеры, чтобы научить специалистов в данной области техники тому, как выполнять и использовать оптимальный режим вариантов осуществления обмена данными с двумя или более подчиненными устройствами. В целях обучения принципам изобретения некоторые традиционные аспекты были упрощены или опущены. Специалисты в данной области техники поймут вариации из этих примеров, которые попадают в рамки настоящего описания. Специалисты в данной области техники поймут, что отличительные признаки, описанные ниже, могут быть объединены различными способами, чтобы формировать множество разновидностей обмена данными с двумя или более подчиненными устройствами. В результате, варианты осуществления, описанные ниже, не ограничиваются конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
Интерфейс может обмениваться данными с двумя или более подчиненными устройствами. Интерфейс может состоять из процессора, соединенного с возможностью обмена данными с двумя или более подчиненными устройствами, и порта связи, который приспособлен соединяться с возможностью обмена данными с шиной "главный-подчиненный". Процессор может быть выполнен с возможностью принимать командный пакет от главного устройства по шине "главный-подчиненный" и связывать адрес подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств. Соответственно, главное устройство может обмениваться данными с каждым из двух или более адресов подчиненных устройств через один интерфейс.
Система
Фиг. 1 показывает систему 5, которая включает в себя интерфейс 100 для обмена данными с двумя или более подчиненными устройствами. Система 5 может быть системой двойного вибрационного датчика. Соответственно, как показано на фиг. 1, система 5 включает в себя первую и вторую подсистемы 5a, 5b, которые могут, соответственно, быть первым и вторым вибрационными датчиками, такими как расходомер Кориолиса. Первая и вторая подсистемы 5a, 5b соответственно состоят из интерфейса 100 и первого и второго подчиненных устройств 10a, 10b. Интерфейс 100 может быть измерительной электронной аппаратурой, а первое и второе подчиненные устройства 10a, 10b могут быть измерительными узлами, сконфигурированными, чтобы измерять свойство текучей среды в измерительных узлах, как объясняет последующее.
Интерфейс 100 соединяется с возможностью обмена данными с первым и вторым подчиненными устройствами 10a, 10b через первый и второй наборы выводов 11a, 11b. Первый и второй наборы выводов 11a, 11b соединяются (например, присоединяются, прикрепляются и т.д.) к первому и второму портам 27a, 27b связи на интерфейсе 100. Первый и второй наборы выводов 11a, 11b также соединяются с первым и вторым подчиненными устройствами 10a, 10b через первый и второй порты 7a, 7b связи на первом и втором подчиненных устройствах 10a, 10b. Интерфейс 100 выполнен с возможностью предоставлять информацию по маршруту 26 главному устройству. Первое и второе подчиненные устройства 10a, 10b показаны с корпусом, который окружает проточные трубы. Интерфейс 100 и первое и второе подчиненные устройства 10a, 10b описываются более подробно в последующем со ссылкой на фиг. 2 и 3.
Все еще обращаясь к фиг. 1, первая и вторая подсистемы 5a, 5b, в качестве вибрационных датчиков, могут быть использованы, например, чтобы вычислять разницу в расходе и/или полном расходе между подающей линией SL и возвратной линией RL. Более конкретно, система 5 может быть использована в применении в условиях низких температур, когда текучая среда подается из бака в жидком состоянии, а затем возвращается в бак в газообразном состоянии. В одном примерном применении в условиях низких температур первое подчиненное устройство 10a может быть частью подающей линии SL, которая подает LNG к LNG-распределителю LD, а второе подчиненное устройство 10b может быть частью возвратной линии RL от LNG-распределителя LD. Полный расход через второе подчиненное устройство 10b может быть вычтен из полного расхода через первое подчиненное устройство 10a, чтобы определять полный объем LNG, подаваемого LNG-транспортному средству. Это примерное применение с подающей и возвратной линиями SL, RL показано штриховыми линиями, чтобы иллюстрировать, что система 5 может быть использована в других применениях. Как также может быть понятно, в описанном и других вариантах осуществления, вычисления могут быть выполнены посредством интерфейса 100, который описывается более подробно в последующем.
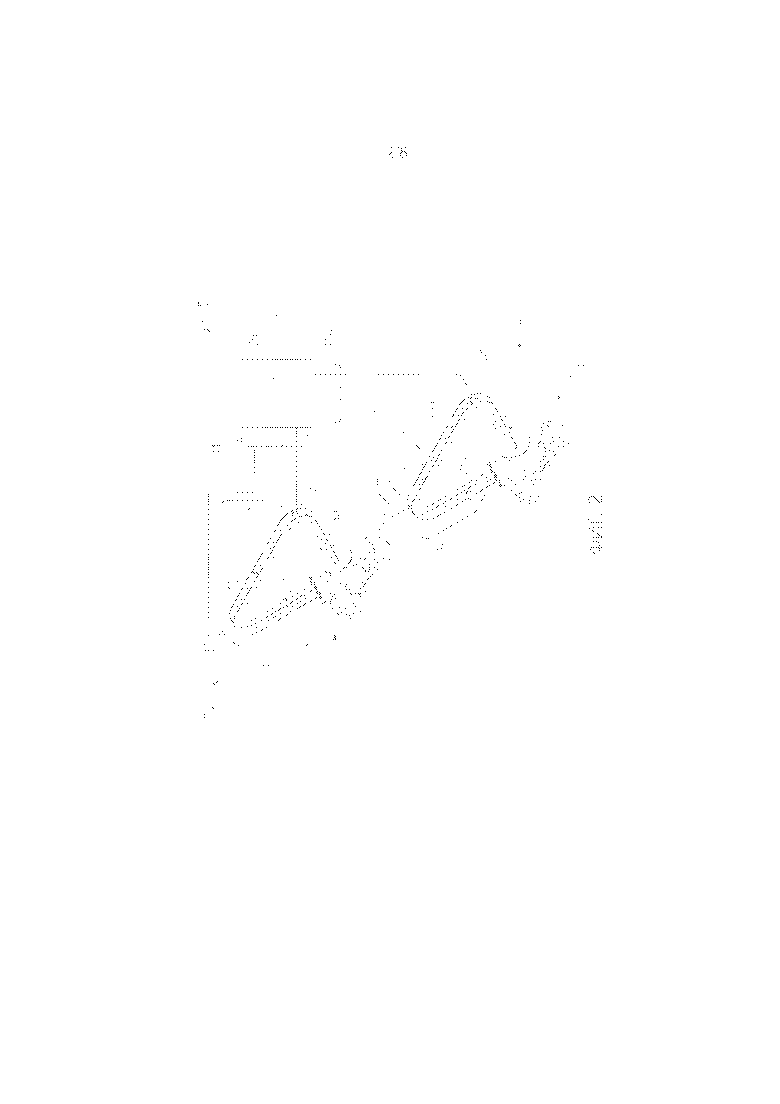
Фиг. 2 показывает систему 5, которая включает в себя интерфейс 100 для обмена данными с двумя или более подчиненными устройствами. Как показано на фиг. 2, система 5 включает в себя первую и вторую подсистемы 5a, 5b, описанные ранее со ссылкой на фиг. 1. Корпусы на интерфейсе 100 и первом и втором подчиненных устройствах 10a, 10b не показаны для ясности. Интерфейс 100 соединяется с первым и вторым подчиненными устройствами 10a, 10b через первый и второй наборы выводов 11a, 11b, чтобы предоставлять информацию о плотности, массовом расходе и температуре по маршруту 26, а также другую информацию. Структура расходомера Кориолиса показана, хотя специалистам в области техники понятно, что настоящее изобретение может быть применено на практике с любыми системами, включающими в себя актуаторы или измерительные преобразователи. Альтернативные вибрационные структуры могут быть использованы, такие как плотнометр с вибрирующей трубой, камертонный плотнометр или т.п.
Как показано, первое и второе подчиненные устройства 10a, 10b являются измерительными узлами, которые включают в себя первую и вторую пару параллельных труб 13a, 13a' и 13b, 13b', возбуждающий механизм 18a, 18b, датчик 19a, 19b температуры и пару левых и правых тензочувствительных датчиков 17al, 17ar и 17bl, 17br. Каждая из пары труб 13a, 13a' и 13b, 13b' согнута в двух симметричных местах вдоль протяжения труб 13a, 13a' и 13b, 13b' и являются практически параллельными на всем своем протяжении. Трубы 13a, 13a' и 13b, 13b' возбуждаются посредством возбуждающих механизмов 18a, 18b в противоположных направлениях относительно их соответствующих осей сгиба и с тем, что называется первой несинфазной изгибной формой колебаний расходомера. Возбуждающие механизмы 18a, 18b могут содержать любую одну из множества конфигураций, таких как магнит, установленный на трубы 13a', 13b', и встречно-включенная катушка, установленная на трубы 13a, 13b, и через которую пропускается переменный ток для вибрирования обеих труб 13a, 13a' и 13b, 13b'. Подходящий возбуждающий сигнал прикладывается посредством интерфейса 100 к возбуждающим механизмам 18a, 18b.
Первая и вторая подсистемы 5a, 5b могут быть первоначально откалиброваны, и коэффициент FCF калибровки расхода, вместе со смещением ΔT0 нуля, может быть сформирован. В эксплуатации коэффициент FCF калибровки расхода может быть умножен на временную задержку ΔT, измеренную посредством тензодатчиков, минус смещение ΔT0 нуля, чтобы формировать массовый расход  . Пример уравнения массового расхода, использующего коэффициент FCF калибровки расхода и смещение ΔT0 нуля, описывается посредством Уравнения (1):
. Пример уравнения массового расхода, использующего коэффициент FCF калибровки расхода и смещение ΔT0 нуля, описывается посредством Уравнения (1):
 (1)
(1)
Где:
 =массовый расход
=массовый расход
FCF=коэффициент калибровки расхода
ΔTmeasured=измеренная временная задержка
ΔT0=первоначальное смещение нуля
Датчики 19a, 19b температуры устанавливаются на трубы 13a', 13b', чтобы непрерывно измерять температуру труб 13a', 13b'. Температура труб 13a', 13b' и, следовательно, напряжение, возникающее на концах датчиков 19a, 19b температуры для заданного тока, регулируется по температуре вещества, проходящего по трубам 13a', 13b'. Зависящие от температуры напряжения, возникающие на концах датчиков 19a, 19b температуры, могут быть использованы интерфейсом 100 для компенсации изменения в модуле упругости труб 13a', 13b' вследствие каких-либо изменений в температуре трубы. В показанном варианте осуществления датчики 19a, 19b температуры являются резистивными датчиками температуры (RTD). Хотя варианты осуществления, описанные в данном документе, используют RTD-датчики, другие датчики температуры могут быть использованы в альтернативных вариантах осуществления, такие как термисторы, термопары и т.д.
Интерфейс 100 принимает сигналы левого и правого датчиков от первого и второго левого и правого тензочувствительных датчиков 17al, 17ar и 17bl, 17br и сигналы температуры от первого и второго датчика 19a, 19b температуры через первый и второй наборы выводов 11a, 11b. Интерфейс 100 предоставляет возбуждающий сигнал возбуждающим механизмам 18a, 18b и осуществляет вибрирование первой и второй пары труб 13a, 13a' и 13b, 13b'. Интерфейс 100 обрабатывает сигналы левого и правого датчиков и сигналы температуры, чтобы вычислять массовый расход и плотность вещества, проходящего через первое и второе подчиненные устройства 10a, 10b. Эта информация, вместе с другой информацией, используется интерфейсом 100 по маршруту 26 в качестве сигнала.
Как может быть оценено, хотя система 5, показанная на фиг. 1 и 2, включает в себя только два подчиненных устройства 10a, 10b, система 5 может быть применена в системах, которые включают в себя более двух подчиненных устройств. Например, интерфейс может быть выполнен с возможностью обмениваться данными с тремя или более подчиненными устройствами. В такой конфигурации система 5 может быть фрагментом интерфейса и двух из трех или более подчиненных устройств.
Интерфейс
Фиг. 3 показывает блок-схему интерфейса 100. Как показано на фиг. 3, интерфейс 100 соединяется с возможностью обмена данными с первым и вторым подчиненными устройствами 10a, 10b. Как описано выше со ссылкой на фиг. 1, первое и второе подчиненные устройства 10a, 10b включают в себя первый и второй левый и правый тензочувствительные датчики 17al, 17ar и 17bl, 17br, возбуждающий механизм 18a, 18b и датчик 19a, 19b температуры, которые соединены с возможностью обмена данными с интерфейсом 100 через первый и второй наборы выводов 11a, 11b через первый и второй каналы 112a, 112b связи и первый и второй I/O-порты 160a, 160b.
Интерфейс 100 предоставляет первый и второй возбуждающие сигналы 14a, 14b через выводы 11a, 11b. Более конкретно, интерфейс 100 предоставляет первый возбуждающий сигнал 14a первому возбуждающему механизму 18a в первом подчиненном устройстве 10a. Интерфейс 100 также выполнен с возможностью подавать второй возбуждающий сигнал 14b во второй возбуждающий механизм 18b во втором подчиненном устройстве 10b. Кроме того, первый и второй сигналы 12a, 12b датчиков соответственно предоставляются первым и вторым подчиненными устройствами 10a, 10b. Более конкретно, в показанном варианте осуществления первый сигнал 12a датчика предоставляется первыми левым и правым тензочувствительными датчиками 17al, 17ar в первом подчиненном устройстве 10a. Второй сигнал 12b датчика предоставляется вторыми левым и правым тензочувствительными датчиками 17bl, 17br во втором подчиненном устройстве 10b. Как может быть понятно, первый и второй сигналы 12a, 12b датчиков соответственно предоставляются интерфейсу 100 через первый и второй каналы 112a, 112b связи.
Интерфейс 100 включает в себя процессор 110, соединенный с возможностью обмена данными с одним или более сигнальными процессорами 120 и одним или более запоминающими устройствами 130. Процессор 110 также соединен с возможностью обмена данными с пользовательским интерфейсом 30. Процессор 110 соединяется с возможностью обмена данными с главным устройством через порт 140 связи по маршруту 26 и получает электропитание через порт 150 электропитания. Процессор 110 может быть микропроцессором, хотя любой подходящий процессор может быть использован. Как показано, процессор 110 включает в себя память 110m процессора, хотя любая подходящая конфигурация может быть использована в альтернативных вариантах осуществления. Например, процессор 110 может состоять из подпроцессоров, таких как многоядерный процессор, последовательных портов связи, интерфейсов периферийных устройств (например, последовательного интерфейса периферийных устройств), запоминающего устройства на кристалле, I/O-портов и/или т.п. В этих и других вариантах осуществления процессор 110 выполнен с возможностью осуществлять операции в отношении принятых и обработанных сигналов, таких как оцифрованные сигналы.
Процессор 110 может принимать оцифрованные сигналы датчиков от одного или более сигнальных процессоров 120. Процессор 110 также выполнен с возможностью предоставлять информацию, такую как сдвиг фазы, свойство текучей среды в первом и втором подчиненных устройствах 10a, 10b или т.п. Процессор 110 может предоставлять информацию главному устройству через порт 140 связи. Процессор 110 может также быть приспособлен сообщаться с одним или более запоминающими устройствами 130, чтобы принимать и/или сохранять информацию в одном или более запоминающих устройствах 130. Например, процессор 110 может принимать коэффициенты калибровки и/или нулевые отметки измерительных узлов (например, сдвиг фазы, когда существует нулевой расход) от одного или более запоминающих устройств 130. Каждый из коэффициентов калибровки и/или нулевых отметок измерительных узлов может соответственно быть ассоциирован с первой и второй подсистемами 5a, 5b и/или первым и вторым подчиненными устройствами 10a, 10b. Процессор 110 может использовать коэффициенты калибровки, чтобы обрабатывать оцифрованные сигналы датчиков, принимаемые от одного или более сигнальных процессоров 120.
Один или более сигнальных процессоров 120 показаны как состоящие из первого и второго кодера/декодера (кодека) 122, 124 и аналого-цифрового преобразователя (ADC) 126. Один или более сигнальных процессоров 120 могут предварительно обрабатывать аналоговые сигналы, оцифровывать предварительно обработанные аналоговые сигналы и/или предоставлять оцифрованные сигналы. Первый и второй кодеки 122, 124 выполнены с возможностью принимать сигнал левого и правого датчиков от первого и второго левого и правого тензочувствительных датчиков 17al, 17ar и 17bl, 17br. Первый и второй кодеки 122, 124 также выполнены с возможностью предоставлять первый и второй сигналы 14a, 14b датчиков первому и второму возбуждающим механизмам 18a, 18b. В альтернативных вариантах осуществления больше или меньше сигнальных процессоров может быть использовано. Например, один кодек может быть использован для первого и второго сигналов 12a, 12b датчиков и первого и второго возбуждающих сигналов 14a, 14b.
В показанном варианте осуществления одно или более запоминающих устройств 130 состоят из постоянного запоминающего устройства (ROM) 132, оперативного запоминающего устройства (RAM) 134 и ферроэлектрического оперативного запоминающего устройства (FRAM) 136. Однако, в альтернативных вариантах осуществления, одно или более запоминающих устройств 130 могут состоять из большего или меньшего числа запоминающих устройств. Дополнительно или альтернативно, одно или более запоминающих устройств 130 могут состоять из различных типов памяти (например, энергозависимой, энергонезависимой и т.д.). Например, другой тип энергонезависимой памяти, такой как, например, стираемое программируемое постоянное запоминающее устройство (EPROM), или т.п., может быть использован вместо FRAM 136.
Соответственно, интерфейс 100 может быть сконфигурирован, чтобы преобразовывать первый и второй сигналы 12a, 12b датчиков из аналоговых сигналов в цифровые сигналы. Интерфейс 100 может также быть выполнен с возможностью обрабатывать оцифрованные сигналы датчиков, чтобы определять свойства текучей среды в первом и втором подчиненных устройствах 10a, 10b. Например, в варианте осуществления, интерфейс 100 может соответственно определять первый и второй сдвиги фазы между первым и вторым левым и правым тензочувствительными датчиками 17al, 17ar и 17bl, 17br в первом и втором подчиненных устройствах 10a, 10b.
Данные, полученные от первого и второго подчиненных устройств 10a, 10b, могут быть предоставлены главному устройству 40 по шине 50 "главный-подчиненный" через интерфейс 100. Соответственно, главное устройство 40 может обмениваться данными с каждым из первого и второго подчиненных устройств 10a, 10b, даже если используется один интерфейс 100, как последующее обсуждает более подробно.
Фиг. 4 показывает другой вид интерфейса 100 для обмена данными с двумя или более подчиненными устройствами. Как показано на фиг. 4, интерфейс 100 соединяется с возможностью обмена данными с главным устройством 40 по шине 50 "главный-подчиненный", которая может включать в себя маршрут 26, описанный выше со ссылкой на фиг. 1-3. Как показано на фиг. 4, интерфейс 100 включает в себя уровень 102 канала передачи данных и базу данных 104, которые могут, соответственно, включать в себя две или более групп адресов и массивов. Также показаны первое и второе подчиненные устройства 10a, 10b. Уровень 102 канала передачи данных включает в себя первую группу 102a адресов и вторую группу 102b адресов. База данных 104 включает в себя первый массив 104a и второй массив 104b. Первая и вторая группы 102a, 102b адресов соответственно соединяются с возможностью обмена данными с первым и вторым массивами 104a, 104b.
Уровень 102 канала передачи данных может быть протоколом последовательной передачи данных для обмена данными между главным устройством и подчиненным устройством. В клиент-серверной терминологии главное устройство может альтернативно называться клиентом, а подчиненное устройство может называться сервером. В показанном варианте осуществления главное устройство 40 передает команду/запрос первому или второму подчиненному устройству 10a, 10b по шине 50 "главный-подчиненный" с помощью уровня 102 канала передачи данных. Уровень 102 канала передачи данных может определять, совпадает ли адрес подчиненного устройства в команде/запросе с адресом из первой и второй групп 102a, 102b адресов. Если адрес подчиненного устройства совпадает с адресом из первой и второй групп 102a, 102b адресов, тогда команда/запрос может быть соединена с возможностью обмена данными с соответствующим первым или вторым массивами 104a, 104b, что описывается более подробно в последующем со ссылкой на фиг. 5.
Шина "главный-подчиненный"
Все еще обращаясь к варианту осуществления, показанному на фиг. 4, главное устройство 40 инициирует все обмены данными по шине 50 "главный-подчиненный". Т.е., подчиненные устройства на шине "главный-подчиненный" не инициируют обмен данными, например, с помощью запроса прерывания. Обмен данными инициируется, когда главное устройство отправляет командный пакет подчиненному устройству по шине "главный-подчиненный". Для отправки команды правильному подчиненному устройству командный пакет включает в себя поле адреса с адресом подчиненного устройства, предназначенного для приема командного пакета. Адресованное подчиненное устройство принимает пакет команды/запроса и отвечает, передавая ответный пакет по шине "главный-подчиненный". Ответ может иметь или может не иметь адреса главного устройства.
Как показано на фиг. 4, протокол команда-ответ использует стандарт последовательного обмена данными, такой как RS-232 или RS-485. Соответственно, интерфейс 100 может быть сконфигурирован для обмена данными с помощью стандарта RS-232 или RS-485. Более конкретно, порт 140 связи может быть разъемом, который является совместимым со стандартом RS-232 или RS-485. Однако, в альтернативных вариантах осуществления, протокол "команда-ответ" может быть 'объединен' в другие протоколы. Например, протокол "команда-ответ" может быть включен в обмен данными по стандарту Ethernet. Соответственно, порт 140 связи может быть Ethernet-портом. Альтернативные порты и протоколы могут быть использованы в других вариантах осуществления.
В этих и других вариантах осуществления первый и второй массивы 104a, 104b могут отвечать на пакет команды/запроса, например, с помощью данных, которые хранятся в первом и втором массивах 104a, 104b. Например, если адрес подчиненного устройства в пакете команды/запроса соответствует первому подчиненному устройству 10a, тогда первый массив 104a может отвечать с помощью данных, предоставленных первым подчиненным устройством 10a. Аналогично, если адрес подчиненного устройства соответствует второму подчиненному устройству 10b, тогда второй массив 104b может отвечать с помощью данных, предоставленных вторым подчиненным устройством 10b. Предоставленные данные могут быть данными, уже сохраненными в первом и втором массивах 104a, 104b, предоставленными первым и вторым подчиненными устройствами 10a, 10b в ответ на пакет команды/запроса или т.п.
Данные, предоставленные первым и вторым массивами 104a, 104b, могут быть переданы главному устройству 40 в ответном пакете с помощью первой и второй группы 102a, 102b адресов. Как показано на фиг. 4, данные, предоставленные первым массивом 104a, могут быть ассоциированы с адресом подчиненного устройства в пакете команды/запроса. Ответный пакет может быть передан через уровень 102 канала передачи данных главному устройству 40. Передача может происходить через порт 140 связи и по шине 50 "главный-подчиненный". Однако, в альтернативных вариантах осуществления, передача может происходить через альтернативный порт связи и/или шину.
Вышеизложенное описывает использование протокола "команда-ответ". Как обсуждалось выше, протокол "команда-ответ" использует командные и ответные пакеты для обмена данными с двумя или более подчиненными устройствами 10a, 10b. Командные и ответные пакеты обсуждаются более подробно далее со ссылкой на фиг. 5.
Пакеты
Фиг. 5 показывает два или более командных пакетов 500, используемых для обмена данными с двумя или более подчиненными устройствами. Как показано на фиг. 5, два или более командных пакетов 500 включают в себя первый командный пакет 500a и второй командный пакет 500b. Первый и второй командные пакеты 500a, 500b соответственно включают в себя первый и второй адреса 510a, 510b подчиненных устройств и полезную информацию 520a, 520b. В варианте осуществления, показанном на фиг. 5, первая и вторая полезные информации 520a, 520b соответственно включают в себя первый и второй коды 522a, 522b, данные 524a, 524b и контрольные значения 526a, 526b, которые могут быть использованы для проверки целостности первого и второго командных пакетов 500a, 500b.
Первый и второй командные пакеты 500a, 500b могут быть структурированы с помощью заголовков и протокольных блоков данных (PDU). Как показано на фиг. 4, PDU состоит из первого и второго кодов 522a, 522b и данных 524a, 524b. Заголовки используются, чтобы передавать PDU по шине адресованному устройству (например, главному устройству 40, первому или второму подчиненному устройству 10a, 10b и т.д.). В показанном варианте осуществления первый и второй адреса 510a, 510b подчиненных устройств могут состоять из целого числа, которое находится в диапазоне от 1 до 247. Соответственно, может быть 248 уникальных устройств, соединенных с шиной 50 "главный-подчиненный". Другие адреса могут быть использованы. Например, '0' может быть использовано для широковещательной рассылки сообщения, которое принимается всеми подчиненными устройствами.
В PDU первый и второй коды 522a, 522b могут быть использованы, чтобы инструктировать подчиненному устройству выполнять запись или чтение из базы данных. Например, первый и второй коды 522a, 522b могут инструктировать подчиненному устройству осуществлять доступ, чтение и/или запись информации в конкретной таблице, массиве или другой структуре данных, в базе данных. Данные, записанные в структуру данных, могут быть первыми и вторыми данными 524a, 524b. Первые и вторые данные 524a, 524b могут быть подходящими данными, которые, например, подходят для использования подчиненным устройством. Например, первые и вторые данные 524a, 524b могут также содержать исполняемые команды, которые могут инструктировать подчиненному устройству, например, предоставлять данные, выполнять функции, такие как приведение в действие или получение результатов измерений, и т.д. Данные могут также включать в себя неисполняемые данные. Например, в варианте осуществления, где первое и второе подчиненные устройства 10a, 10b являются измерительными узлами, первая и вторая полезные нагрузки 520a, 520b могут включать в себя информацию, такую как тип запрошенных данных. Тип запрошенных данных может быть расходом, соответственно измеренным первым и вторым подчиненными устройствами 10a, 10b.
В протоколе "команда-ответ" ответный пакет может иметь структуру, аналогичную командному пакету. Например, ответный пакет может иметь заголовок, который включает в себя адрес. Адрес может быть адресом подчиненного устройства, которое предоставляет ответный пакет. Дополнительно или альтернативно, заголовок может включать в себя адрес главного устройства. PDU в ответном пакете может включать в себя данные, предоставленные подчиненным устройством. Процессы, которые исполняют протокол "команда-ответ", описываются более подробно в последующем со ссылкой на фиг. 6.
Пакетные процессы
Фиг. 6 показывает два или более пакетных процессов 600, используемых для обмена данными с двумя или более подчиненными устройствами. Интерфейс 100, описанный выше со ссылкой на фиг. 5, также показан с уровнем 102 канала передачи данных и первым и вторым массивами 104a, 104b. Как показано на фиг. 6, два или более пакетных процессов 600 включают в себя первый и второй пакетные процессы 600a, 600b. В показанном варианте осуществления первый и второй пакетные процессы 600a, 600b могут соответственно принимать первый и второй командные пакеты 500a, 500b, которые описываются выше со ссылкой на фиг. 5, хотя другие пакеты могут быть использованы в альтернативных вариантах осуществления.
Как показано на фиг. 6, первый и второй пакетные процессы 600a, 600b соответственно включают в себя первый и второй анализаторы 602a, 602b, которые исполняются на уровне 102 канала передачи данных, и процессоры 604a, 604b полезной нагрузки. Первый и второй процессоры 604a, 604b полезной нагрузки соответственно принимают и интерпретируют первую и вторую полезную нагрузку 520a, 520b как запрос данных из первого и второго массивов 104a, 104b и возвращают запрошенные данные первому и второму анализаторам (парсерам) 602a, 602b. Первый и второй анализаторы 602a, 602b объединяют запрошенные данные в первый и второй ответные пакеты и отправляют первый и второй ответные пакеты в качестве первого и второго ответов 606a, 606b.
Интерфейс 100, протокол "команда-ответ" и пакетные процессы 600, а также другие варианты осуществления, могут быть использованы способами для связи с двумя или более подчиненными устройствами, как в последующем обсуждается более подробно.
Способы
Фиг. 7 показывает способ 700 для обмена данными с двумя или более подчиненными устройствами. На этапе 710 способ 700 принимает командный пакет с интерфейсом. Командный пакет может быть отправлен главным устройством по шине "главный-подчиненный". Интерфейс может быть интерфейсом 100, описанным выше со ссылкой на фиг. 1-4. В варианте осуществления интерфейс является измерительной электронной аппаратурой для вибрационного датчика. На этапе 720 способ 700 связывает адрес подчиненного устройства в командном пакете с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом. В варианте осуществления, когда интерфейс является измерительной электронной аппаратурой, адрес подчиненного устройства может быть ассоциирован с измерительным узлом, соединенным с возможностью обмена данными с измерительной электронной аппаратурой. Т.е., измерительная электронная аппаратура может использовать адрес подчиненного устройства, чтобы идентифицировать конкретный измерительный узел.
На этапе 710 способ 700 может принимать командный пакет, например, через порт 140 связи, описанный выше. Командный пакет может быть принят с шины 50 "главный-подчиненный". На этапе 710 способ 700 может также определять, адресован ли командный пакет интерфейсу. Например, со ссылкой на фиг. 5, интерфейс 100 может определять, совпадает ли первый адрес 510a подчиненного устройства в первом командном пакете 500a с адресом из первой и второй групп 102a, 102b адресов, показанных на фиг. 4.
На этапе 720 способ 700 может связывать адрес подчиненного устройства в командном пакете с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом. Способ 700 может, например, сравнивать адрес подчиненного устройства в командном пакете с адресами, сохраненными в интерфейсе. Со ссылкой на фиг. 4, адрес подчиненного устройства в командном пакете может быть сравнен, на уровне 102 канала передачи данных, с первой и второй группами 102a, 102b адресов. Сравнение может быть выполнено посредством первого и второго пакетных процессов 600a, 600b, описанных выше. Как может быть понятно, первый и второй пакетные процессы 600a, 600b могут выполнять другие способы и этапы, как в последующем обсуждается более подробно.
Фиг. 8 показывает другой способ 800 для обмена данными с двумя или более подчиненными устройствами. На этапе 810 способ 800 принимает командный пакет с помощью интерфейса, который может выполняться способом, аналогичным этапу 710, описанному выше. На этапе 820 способ 800 может извлекать посредством анализа адрес подчиненного устройства из командного пакета. Адрес подчиненного устройства может быть в заголовке командного пакета. На этапе 830 способ 800 определяет, связан ли первый байт адреса подчиненного устройства с первой группой адресов, такой как первая группа 102a адресов, описанная со ссылкой на фиг. 4. Если первый байт адреса подчиненного устройства связан с первой группой адресов, тогда адрес подчиненного устройства связывается с первым массивом на этапе 840, который может быть первым массивом 104a, описанным выше со ссылкой на фиг. 4.
Если первый байт адреса подчиненного устройства не связан с первой группой адресов, тогда способ 800 переходит к этапу 850. На этапе 850 способ 800 определяет, связан ли первый байт адреса подчиненного устройства со второй группой адресов, которая может быть второй группой 102b адресов, описанной выше со ссылкой на фиг. 4. Если первый байт адреса подчиненного устройства связан со второй группой адресов, тогда способ 800 переходит к этапу 860, который связывает адрес подчиненного устройства со вторым массивом. Если первый байт адреса подчиненного устройства не связан со второй группой адресов, тогда способ переходит к этапу 870, который указывает ошибку. После того как адрес подчиненного устройства связан с одним из первого и второго массивов на этапах 840 и 860, способ 800 обрабатывает полезную информацию командного пакета на этапе 880 и отвечает с помощью ответного пакета главному устройству на этапе 890.
Этапы 830 и 850 могут быть выполнены посредством программного обеспечения, которое включает в себя структуру данных, которая связывает адрес подчиненного устройства с массивами. Например, в таблице данных, каждая строка может соответствовать соотношению между адресом подчиненного устройства и массивом. Соответственно, на этапах 830 и 850, способ 800 может отыскивать первый байт адреса подчиненного устройства в таблице и выбирать соответствующий массив. Могут быть использованы другие структуры данных и/или способы. На основе этапов 830 и 850 этапы 840 и 860 могут связывать адрес подчиненного устройства с первым или вторым массивом.
После связывания с первым или вторым массивом, полезная информация командного пакета может быть обработана, чтобы, например, получать данные из первого или второго массива. Со ссылкой на первый и второй массивы 104a, 104b, описанные выше со ссылкой на фиг. 4, способ 800 может исполнять коды, такие как первый и второй коды 522a, 522b, чтобы считывать и/или записывать данные. Например, если адрес подчиненного устройства связан с первым массивом 104a, тогда первый код 522a и/или данные 524a могут инструктировать интерфейсу 100 опрашивать первый массив 104a на предмет данных. Дополнительно или альтернативно, первый код 522a и/или данные 524a могут инструктировать интерфейсу 100 получать данные от первого подчиненного устройства. Соответственно, данные могут быть предоставлены первым массивом 104a в ответ на первый командный пакет 500a.
Варианты осуществления, описанные выше, обеспечивают обмен данными с двумя или более подчиненными устройствами. Как объяснено выше, система 5, интерфейс 100 и способ 700, 800 могут обмениваться данными с первым и вторым подчиненными устройствами 10a, 10b, которые соединяются с возможностью обмена данными с интерфейсом 100. Первое и второе подчиненные устройства 10a, 10b могут предоставлять данные интерфейсу 100. Данные могут соответственно быть сохранены в первом и втором массивах 104a, 104b, которые могут соответственно быть ассоциированы с первым и вторым подчиненными устройствами 10a, 10b. Интерфейс 100 может принимать первый или второй командные пакеты 500a, 500b. Интерфейс 100 может также извлекать посредством анализа первый и второй адреса 502a, 502b подчиненных устройств из первого и второго командных пакетов 500a, 500b и соответственно связывать первый и второй адреса 502a, 502b подчиненных устройств с первым и вторым подчиненными устройствами 10a, 10b. Соответственно, данные могут быть получены от первого и второго подчиненных устройств 10a, 10b через один интерфейс 100.
Например, при применении в условиях низких температур, например, в LNG-топливных системах, интерфейс 100 может быть измерительной электронной аппаратурой, сконфигурированной как для первого измерительного узла, соответствующего первому подчиненному устройству 10a, которое находится в линии SL подачи LNG, так и для второго измерительного узла, соответствующего второму подчиненному устройству 10b, которое находится в линии RL возврата LNG. Первый измерительный узел может быть 1-дюймовым типом вибрационного датчика, ассоциированным с первым массивом 104a, а второй измерительный узел может быть 1/4-дюймовым типом вибрационного датчика, ассоциированным со вторым массивом 104b. Интерфейс 100 может, следовательно, корректно предоставлять данные главному устройству 40 от первого и второго подчиненных устройств 10a, 10b, чтобы точно измерять расходы LNG как в подающей линии SL, так и в возвратной линии RL.
Подробные описания вышеупомянутых вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, рассматриваемых изобретателями как находящиеся в рамках настоящего описания. В действительности, специалисты в области техники поймут, что определенные элементы вышеописанных вариантов осуществления могут по-разному быть объединены или устранены, чтобы создавать дополнительные варианты осуществления, и такие дополнительные варианты осуществления попадают в рамки и учения настоящего описания. Также обычным специалистам в данной области техники будет очевидно, что вышеописанные варианты осуществления могут быть объединены в целом или частично, чтобы создавать дополнительные варианты осуществления в рамках и учениях настоящего описания.
Таким образом, хотя конкретные варианты осуществления описываются в данном документе в иллюстративных целях, различные эквивалентные модификации возможны в рамках настоящего описания, как поймут специалисты в соответствующей области техники. Учения, предоставленные в данном документе, могут быть применены к другим системам и способам, которые обмениваются данными с двумя или более подчиненными устройствами, а не только к вариантам осуществления, описанным выше и показанным на сопровождающих чертежах. Соответственно, рамки вариантов осуществления, описанных выше, должны быть определены из последующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТРАЖАЮЩЕЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ, ИМЕЮЩЕЕ ДОСТУПНЫЙ ДЛЯ ПРОСМОТРА ДИСПЛЕЙ НА ОБЕИХ СТОРОНАХ | 2005 |
|
RU2397519C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ РЕСУРСА ОТКЛЮЧЕНИЯ | 2018 |
|
RU2773432C2 |
| СИНХРОНИЗАЦИЯ БЕСПРОВОДНЫХ НАУШНИКОВ | 2010 |
|
RU2551816C2 |
| СПОСОБ ОБМЕНА ДАННЫМИ ДЫМОВОЙ И ПОЖАРНОЙ СИГНАЛИЗАЦИИ ПОЕЗДА, ОСНОВАННЫЙ НА КОМБИНАЦИИ НЕЗАВИСИМЫХ МОДУЛЕЙ И КОНСТРУКЦИИ ШАССИ 3U | 2016 |
|
RU2674493C1 |
| СОПРЯЖЕНИЕ УСТРОЙСТВ В ЛОКАЛЬНОЙ СЕТИ | 2016 |
|
RU2702047C2 |
| РЕГУЛЯТОР РАСПРЕДЕЛЕНИЯ ЖИДКОСТИ | 2018 |
|
RU2758924C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ СВЯЗИ | 2008 |
|
RU2448436C2 |
| УСТРОЙСТВО СВЯЗИ | 2019 |
|
RU2792280C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ДОСТУПА К ЦЕЛЕВОМУ ДИСКОВОМУ ЗАПОМИНАЮЩЕМУ УСТРОЙСТВУ, СИСТЕМА РАСШИРЕНИЯ ДИСКОВОЙ ЕМКОСТИ И ДИСКОВЫЙ МАССИВ | 2006 |
|
RU2399951C2 |
| ЭКСПЛУАТАЦИЯ СЕТЕЙ С ФРАГМЕНТАЦИЕЙ | 2017 |
|
RU2725625C2 |
Изобретение относится к области вычислительной техники. Технический результат заключается в снижении сложности конструкции. Способ обмена данными с двумя или более подчиненными устройствами содержит этапы, на которых принимают командный пакет с помощью интерфейса, при этом командный пакет отправлен главным устройством по шине "главный-подчиненный", и связывают адрес подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом. 3 н. и 13 з.п. ф-лы, 8 ил.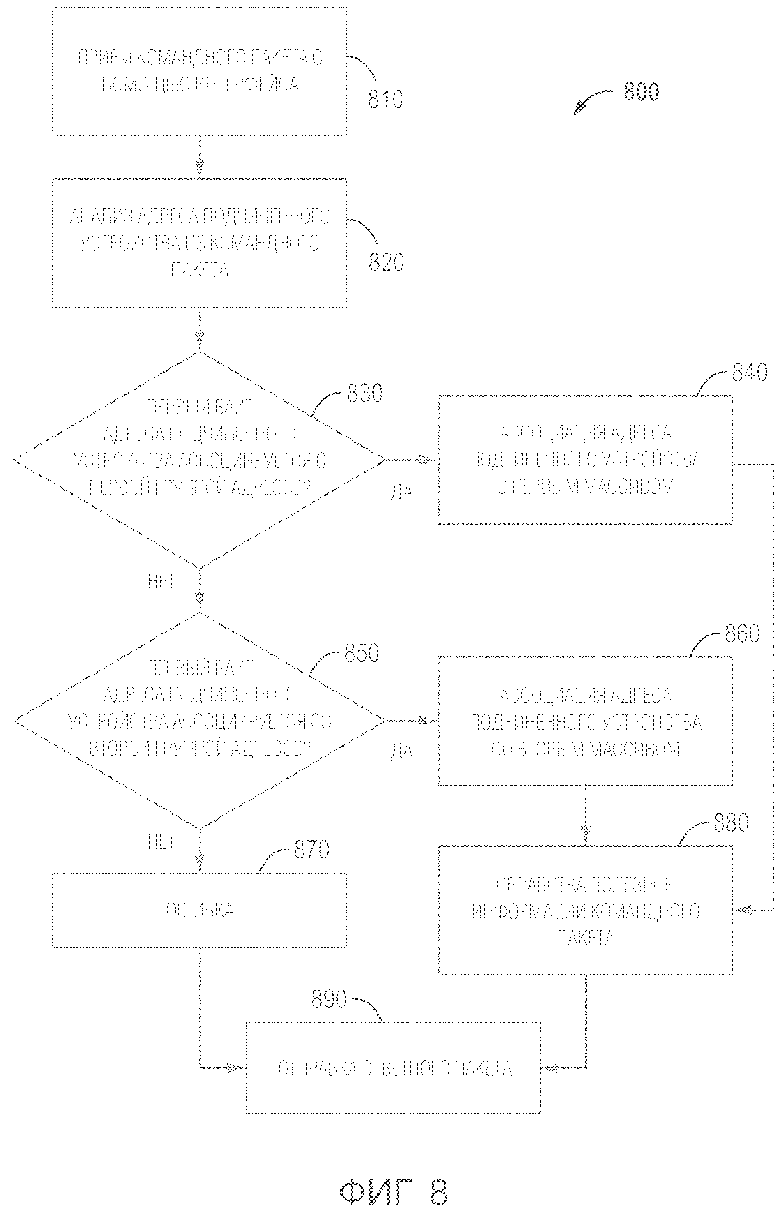
1. Способ обмена данными с двумя или более подчиненными устройствами, содержащий этапы, на которых:
принимают командный пакет с помощью интерфейса, при этом командный пакет отправлен главным устройством по шине "главный-подчиненный"; и
связывают адрес подчиненного устройства из командного пакета с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом.
2. Способ по п. 1, в котором прием командного пакета с помощью интерфейса содержит этапы, на которых принимают командный пакет с помощью порта, соединенного с возможностью обмена данными с шиной "главный-подчиненный", и определяют, соответствует ли адрес подчиненного устройства по меньшей мере одному из двух или более подчиненных устройств.
3. Способ по п. 1 или 2, в котором связывание адреса подчиненного устройства с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом, содержит этап, на котором связывают адрес подчиненного устройства с одним из двух или более массивов, при этом каждый из двух или более массивов связан с каждым из двух или более подчиненных устройств.
4. Способ по любому из пп. 1-3, в котором связывание адреса подчиненного устройства с одним из двух или более подчиненных устройств, соединенных с возможностью обмена данными с интерфейсом, содержит этапы, на которых извлекают посредством анализа адрес подчиненного устройства из командного пакета и сравнивают извлеченный адрес с двумя или более группами адресов, при этом каждая из двух или более групп адресов связана с каждым из двух или более подчиненных устройств.
5. Способ по любому из пп. 1-4, дополнительно содержащий этап, на котором отвечают на командный пакет посредством передачи ответного пакета с данными, полученными от одного из двух или более подчиненных устройств, которое связано с адресом подчиненного устройства в командном пакете.
6. Способ по п. 5, в котором ответный пакет передается через порт, соединенный с возможностью обмена данными с шиной "главный-подчиненный".
7. Интерфейс (100) для обмена данными с двумя или более подчиненными устройствами, причем интерфейс (100) содержит:
процессор (110), приспособленный соединяться с возможностью обмена данными с двумя или более подчиненными устройствами (10a, 10b); и
порт (140) связи, соединенный с возможностью обмена данными с процессором (110), причем порт (140) связи приспособлен соединяться с возможностью обмена данными с шиной (50) "главный-подчиненный";
при этом процессор (110) выполнен с возможностью:
принимать командный пакет (500a, 500b) от главного устройства (40) по шине (50) "главный-подчиненный"; и
связывать адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) с одним из двух или более подчиненных устройств (10a, 10b).
8. Интерфейс (100) по п. 7, в котором процессор (110), будучи выполненным с возможностью принимать командный пакет (500a, 500b), выполнен с возможностью принимать командный пакет (500a, 500b) с помощью порта (140) связи, соединенного с возможностью обмена данными с шиной (50) "главный-подчиненный", и определять, соответствует ли адрес (502a, 502b) подчиненного устройства по меньшей мере одному из двух или более подчиненных устройств (10a, 10b).
9. Интерфейс (100) по п. 7 или 8, в котором процессор (110), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более массивов (104a, 104b), при этом каждый из двух или более массивов (104a, 104b) связан с каждым из двух или более подчиненных устройств (10a, 10b).
10. Интерфейс (100) по любому из пп. 7-9, в котором процессор (110), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью извлекать посредством анализа адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) и сравнивать извлеченный адрес (502a, 502b) подчиненного устройства с двумя или более группами (102a, 102b) адресов, при этом каждая из двух или более групп (102a, 102b) адресов связана с каждым из двух или более подчиненных устройств (10a, 10b).
11. Интерфейс (100) по любому из пп. 7-10, в котором процессор (110) дополнительно выполнен с возможностью отвечать на командный пакет (500a, 500b) посредством передачи ответного пакета с данными, полученными от одного из двух или более подчиненных устройств (10a, 10b), которое связано с адресом (502a, 502b) подчиненного устройства в командном пакете (500a, 500b).
12. Интерфейс (100) по п. 11, при этом ответный пакет передается через порт (140), соединенный с возможностью обмена данными с шиной (50) "главный-подчиненный".
13. Система (5) для обмена данными с двумя или более подчиненными устройствами, причем система (5) содержит:
интерфейс (100), соединенный с возможностью обмена данными с главным устройством (40) по шине (50) "главный-подчиненный"; и
два или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100);
при этом интерфейс (100) выполнен с возможностью:
принимать командный пакет (500a, 500b) от главного устройства (40) по шине (50) "главный-подчиненный" и
связывать адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) с одним из двух или более подчиненных устройств (10a, 10b).
14. Система (5) по п. 13, в которой интерфейс (100), будучи выполненным с возможностью принимать командный пакет (500a, 500b), выполнен с возможностью принимать командный пакет (500a, 500b) с помощью порта (140) связи, соединенного с возможностью обмена данными с шиной (50) "главный-подчиненный", и определять, соответствует ли адрес (502a, 502b) подчиненного устройства по меньшей мере одному из двух или более подчиненных устройств (10a, 10b).
15. Система (5) по п. 13 или 14, в которой интерфейс (100), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более массивов (104a, 104b), при этом каждый из двух или более массивов (104a, 104b) связан с каждым из двух или более подчиненных устройств (10a, 10b).
16. Система (5) по любому из пп. 13-15, в которой интерфейс (100), будучи выполненным с возможностью связывать адрес (502a, 502b) подчиненного устройства с одним из двух или более подчиненных устройств (10a, 10b), соединенных с возможностью обмена данными с интерфейсом (100), выполнен с возможностью извлекать посредством анализа адрес (502a, 502b) подчиненного устройства из командного пакета (500a, 500b) и сравнивать извлеченный адрес (502a, 502b) подчиненного устройства с двумя или более группами (102a, 102b) адресов, при этом каждая из двух или более групп (102a, 102b) адресов связана с каждым из двух или более подчиненных устройств (10a, 10b).
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 6868097 B1, 15.03.2005 | |||
| US 5630152 A, 13.05.1997 | |||
| US 6636927 B1, 21.10.2003. | |||

