Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает преимущество по предварительной заявке США № 62/209,665, поданной 25 августа 2015 г., предварительной заявке США № 62/250,840, поданной 4 ноября 2015 г., предварительной заявке США № 62/254,916, поданной 13 ноября 2015 г., и предварительной заявке США № 62/273,245, поданной 30 декабря 2015 г., содержания которых включены в настоящий документ путем ссылки.
Предпосылки создания изобретения
Технология мобильной связи непрерывно эволюционирует и уже достигла порога своего пятого воплощения — 5G. Как и в предыдущих поколениях, появление новых сфер применения в значительной степени способствует определению требований для нового поколения.
Ожидается, что радиоинтерфейс 5G будет включать такие аспекты применения, как широкополосная связь с улучшенными характеристиками (IBB), массовая широкополосная сеть (например, с временными интервалами передачи 1 мс (TTI)), сверхмалая задержка (например, ~ 125 мкс), сверхнадежная передача (например, одиночная TTI- и мульти-TTI-диспетчеризация), передача между узлами с низким энергопотреблением, например с устройства на устройство (D2D), а также транспортное применение (V2X), промышленное управление и связь (ICC) и массовая межмашинная связь (mMTC).
Изложение сущности изобретения
Раскрыты различные подходы к гибкому и переменному кадрированию. В некоторых вариантах осуществления для структур с переменным кадром определяется структура кадра и кадровая синхронизация. Для гибкой структуры кадра определяются синхронизация и кадровая синхронизация. Выполняются диспетчеризация и согласование линии связи. Диспетчеризация и согласование линии связи могут быть основаны на двух экземплярах информации управления нисходящей линии связи (DCI). Технический результат заявленного изобретения заключается в предоставлении гибких ресурсов времени и ресурсов символов для передачи по нисходящей линии связи (DL).
WTRU может принимать DCI, указывающую начало кадра. DCI может быть принята по каналу управления, такому как физический канал управления нисходящей линии связи (PDCCH), от eNB, базовой станции, AP или другого оборудования инфраструктуры, работающего в системе беспроводной связи. WTRU может декодировать DCI и определять длительность временного интервала передачи (TTI), который может быть выражен в виде целого числа базовых временных интервалов (BTI). WTRU может определять порцию и назначение передачи нисходящей линии связи (DL), а также порцию передачи восходящей линии связи (UL) и предоставление UL на основе принятой DCI. Кроме того, WTRU может определять начало порции UL на основе смещения (toffset). WTRU может принимать данные в порции DL кадра и может осуществлять передачу в порции UL кадра на основе определенного предоставления UL и длительности TTI.
Краткое описание чертежей
Более подробное объяснение содержится в представленном ниже описании, приведенном в качестве примера, в сочетании с прилагаемыми чертежами, на которых:
фиг. 1A представляет собой системную схему примера системы связи, в которой могут быть реализованы один или более раскрытых вариантов осуществления;
фиг. 1B представляет собой системную схему примера модуля беспроводной передачи/приема (WTRU), который может применяться в рамке системы связи, изображенной на фиг. 1A;
фиг. 1C представляет собой системную схему примера сети радиодоступа и примера базовой сети, которые могут применяться в рамках системы связи, изображенной на фиг. 1A;
фиг. 2 представляет собой схему, на которой изображены примеры некоторых из поддерживаемых значений ширины полосы пропускания системы;
фиг. 3 представляет собой схему примера гибкого выделения спектра;
фиг. 4 представляет собой схему примера гибкой структуры кадра для TDD, которая может применяться в системе беспроводной связи, такой как система 5gFLEX;
фиг. 5 представляет собой схему примера структуры кадра для FDD, которая может применяться в системе беспроводной связи, такой как система 5gFLEX;
фиг. 6A представляет собой блок-схему примера процесса динамического определения структуры и синхронизации для переменного кадра;
фиг. 6В представляет собой блок-схему примера процесса динамического конфигурирования структуры и синхронизации для переменного кадра;
фиг. 7 представляет собой блок-схему примера процесса передачи для гибкого кадрирования;
фиг. 8 представляет собой блок-схему примера процесса определения кадровой синхронизации и/или номера кадра в системе;
фиг. 9 представляет собой блок-схему примера процесса управления передачей и диспетчеризации; и
фиг. 10 представляет собой блок-схему примера процесса согласования линии связи и диспетчеризации.
Подробное описание
Фиг. 1A представляет собой схему примера системы связи 100, в которой может быть реализован один или более раскрытых вариантов осуществления. Система 100 связи может быть системой коллективного доступа, которая предоставляет контент, такой как голосовая информация, данные, видео, сообщения, широковещание и т. д., для множества пользователей беспроводной связи. Система 100 связи может позволять множеству пользователей беспроводной связи получать доступ к такому контенту путем совместного использования системных ресурсов, включая ширину полосы пропускания беспроводного соединения. Например, в системах 100 связи может использоваться один или более способов доступа к каналам, таких как множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с ортогональным частотным разделением каналов (OFDMA), ортогональное частотное разделение каналов с мультиплексированием на одной несущей (SC-FDMA) и т. п.
Как показано на фиг. 1A, система 100 связи может включать в себя модули беспроводной передачи/приема (WTRU), 102a, 102b, 102c, 102d, сеть радиодоступа (RAN) 104, базовую сеть 106, коммутируемую телефонную сеть 108 общего пользования (PSTN), сеть Интернет 110 и другие сети 112, хотя следует понимать, что раскрытые варианты осуществления предполагают любое число WTRU, базовых станций, сетей и/или сетевых элементов. Каждый из WTRU 102a, 102b, 102c, 102d может быть устройством любого типа, выполненным с возможностью работы и/или взаимодействия в среде беспроводной связи. В качестве примера, WTRU 102a, 102b, 102c, 102d могут быть выполнены с возможностью передачи и/или приема радиосигналов и могут включать в себя оборудование пользователя (UE), мобильную станцию либо фиксированный или мобильный абонентский блок, пейджер, сотовый телефон, карманный персональный компьютер (КПК), смартфон, беспроводный датчик, бытовую электронику и т. п.
Системы 100 связи также могут включать в себя базовую станцию 114a и базовую станцию 114b. Каждая из базовых станций 114a, 114b может быть устройством любого типа, выполненным с возможностью беспроводного взаимодействия с по меньшей мере одним из WTRU 102a, 102b, 102c, 102d, для облегчения доступа к одной или более сетям связи, таким как базовая сеть 106, сеть Интернет 110 и/или другие сети 112. В качестве примера, базовые станции 114a, 114b могут представлять собой базовую приемопередающую станцию (BTS), станцию Node-B (eNB), станцию eNode B, станцию Home Node B, станцию Home eNode B, контроллер пункта связи, точку доступа (AP), беспроводной маршрутизатор и т. п. Хотя базовые станции 114a, 114b показаны как отдельный элемент, следует понимать, что базовые станции 114a, 114b могут включать в себя любое число взаимно соединенных базовых станций и/или сетевых элементов.
Базовая станция 114a может являться частью RAN 104, которая может также включать в себя другие базовые станции и/или сетевые элементы (не показаны), такие как контроллер базовой станции (BSC), контроллер радиосети (RNC), ретрансляционные узлы и т.д. Базовая станция 114a и/или базовая станция 114b могут быть выполнены с возможностью передачи и/или приема радиосигналов в пределах определенного географического региона, который может назваться ячейкой (не показана). Ячейка может дополнительно разделяться на сектора. Например, ячейка, связанная с базовой станцией 114a, может быть разделена на три сектора. Таким образом, в одном варианте осуществления базовая станция 114a может включать в себя три приемопередатчика, т. е. один для каждого сектора ячейки. В другом варианте осуществления базовая станция 114a может использовать технологию многоканального входа — многоканального выхода (MIMO) и, следовательно, может использовать множество приемопередатчиков для каждого сектора ячейки.
Базовые станции 114a, 114b могут взаимодействовать с одним или более из WTRU 102a, 102b, 102c, 102d по радиоинтерфейсу 116, который может являться любой подходящей беспроводной линией связи (например, для передачи сигналов в радиочастотном (РЧ) спектре, в микроволновом спектре, инфракрасном (ИК) спектре, ультрафиолетовом (УФ) спектре, спектре видимого света и т.д.). Радиоинтерфейс 116 может быть установлен с использованием любой подходящей технологии радиодоступа (RAT).
Более конкретно, как указано выше, система 100 связи может являться системой коллективного доступа и может использовать одну или более схем доступа к каналам, таких как CDMA, TDMA, FDMA, OFDMA, SC-FDMA и т. п. Например, базовая станция 114a в RAN 104 и WTRU 102a, 102b, 102c могут реализовывать технологию радиосвязи, такую как универсальный наземный доступ (UTRA) для универсальной мобильной телекоммуникационной системы (UMTS), которая может устанавливать радиоинтерфейс 116 с использованием широкополосного CDMA (WCDMA). WCDMA может включать в себя протоколы связи, такие как протокол высокоскоростной передачи пакетных данных (HSPA) и/или улучшенный HSPA (HSPA+). HSPA может включать в себя высокоскоростной пакетный доступ по нисходящей линии связи (HSDPA) и/или высокоскоростной пакетный доступ по восходящей линии связи (HSUPA).
В другом варианте осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать технологию радиосвязи, такую как расширенный универсальный наземный доступ (E-UTRA) для UMTS, которая может устанавливать радиоинтерфейс 116 с использованием стандарта долгосрочного развития (LTE) и/или стандарта LTE-Advanced (LTE-A).
В других вариантах осуществления базовая станция 114a и WTRU 102a, 102b, 102c могут реализовывать технологии радиосвязи, такие как IEEE 802.16 (т.е. глобальная совместимость для микроволнового доступа (WiMAX)), CDMA2000, CDMA2000 1X, CDMA2000 EV-DO, временный стандарт 2000 (IS-2000), временный стандарт 95 (IS-95), временный стандарт 856 (IS-856), глобальная система мобильной связи (GSM), усовершенствованная скорость передачи данных для эволюции сетей GSM (EDGE), GSM EDGE (GERAN) и т.п.
Базовая станция 114b, показанная на фиг. 1A, может быть, например, беспроводным маршрутизатором, станцией Home Node B, станцией Home eNode B или точкой доступа, и может использовать любую подходящую RAT для упрощения возможности беспроводной связи в локализованной области, такой как предприятие, жилое помещение, транспортное средство, территория учебного заведения и т.п. В одном варианте осуществления базовая станция 114b и WTRU 102c, 102d могут реализовывать технологию радиосвязи, такую как IEEE 802.11, для организации беспроводной локальной сети (WLAN). В другом варианте осуществления базовая станция 114b и WTRU 102c, 102d могут реализовывать технологию радиосвязи, такую как IEEE 802.15, для организации персональной беспроводной сети (WPAN). В еще одном варианте осуществления базовая станция 114b и WTRU 102c, 102d могут использовать RAT на основе сот (например, WCDMA, CDMA2000, GSM, LTE, LTE-A и т. д.) для организации пикосоты или фемтосоты. Как показано на фиг. 1A, базовая станция 114b может иметь прямое соединение с сетью Интернет 110. Таким образом, базовая станция 114b может не требовать доступа к сети Интернет 110 посредством базовой сети 106.
RAN 104 может взаимодействовать с базовой сетью 106, которая может быть сетью любого типа, выполненной с возможностью предоставления услуг передачи голосовой информации, данных, приложений и/или голосовой связи по протоколу Интернета (VoIP) одному или более из WTRU 102a, 102b, 102c, 102d. Например, базовая сеть 106 может обеспечивать управление вызовами, услуги биллинга, услуги мобильной связи на основе местоположения, предварительно оплаченные вызовы, возможность осуществления связи с сетью Интернет, распределение видеосигналов и т. д. и/или реализовать функции высокоуровневой защиты, такие как аутентификация пользователей. Несмотря на то что на фиг. 1A этого не показано, следует понимать, что RAN 104 и/или базовая сеть 106 могут прямо или косвенно взаимодействовать с другими RAN, которые используют такую же RAT, что и RAN 104, или другую RAT. Например, в дополнение к соединению с RAN 104, которая может использовать технологию радиосвязи Е-UTRA, базовая сеть 106 также может взаимодействовать с другой RAN (не показана) с использованием технологии радиосвязи GSM.
Базовая сеть 106 также может служить в качестве шлюза для WTRU 102a, 102b, 102c, 102d для обеспечения доступа к сети PSTN 108, сети Интернет 110 и/или другим сетям 112. PSTN 108 может включать в себя сети телефонной связи с коммутацией каналов, которые предоставляют традиционные услуги телефонной связи (POTS). Сеть Интернет 110 может включать в себя глобальную систему взаимно соединенных компьютерных сетей и устройств, которые используют общие протоколы связи, такие как, например, протокол управления передачей данных (TCP), протокол пользовательских дейтаграмм (UDP) и протокол Интернета (IP) в наборе протоколов Интернета TCP/IP. Сети 112 могут включать в себя проводные или беспроводные сети связи, которые принадлежат и/или предоставляются для использования другими поставщиками услуг. Например, сети 112 могут включать в себя другую базовую сеть, соединенную с одной или более RAN, которые могут использовать такую же RAT, что и RAN 104, или другую RAT.
Некоторые или все из WTRU 102a, 102b, 102c, 102d в системе 100 связи могут включать в себя многорежимные возможности, т. е. WTRU 102a, 102b, 102c, 102d могут включать в себя множество приемопередатчиков для взаимодействия с различными беспроводными сетями по различным беспроводным линиям связи. Например, WTRU 102c, показанный на фиг. 1A, может быть выполнен с возможностью взаимодействия с базовой станцией 114a, которая может использовать технологию радиосвязи на основе сот, а также с базовой станцией 114b, которая может использовать технологию радиосвязи IEEE 802.
Фиг. 1B представляет собой системную схему примера WTRU 102. Как показано на фиг. 1B, WTRU 102 может включать в себя процессор 118, приемопередатчик 120, передающий/приемный элемент 122, динамик/микрофон 124, клавиатуру 126, дисплей/сенсорную панель 128, несъемную память 130, съемную память 132, источник питания 134, набор микросхем 136 глобальной системы определения местоположения (GPS) и другие периферийные устройства 138. Следует понимать, что WTRU 102 может включать в себя любую подкомбинацию вышеперечисленных элементов и в то же время соответствовать варианту осуществления.
Процессор 118 может быть процессором общего назначения, процессором специального назначения, традиционным процессором, цифровым сигнальным процессором (DSP), множеством микропроцессоров, одним или более микропроцессорами, связанными с ядром DSP, контроллером, микроконтроллером, специализированными интегральными микросхемами (ASIC), схемами программируемой пользователем вентильной матрицы (FPGA), интегральной микросхемой (IC) любого другого типа, конечным автоматом и т. п. Процессор 118 может выполнять кодирование сигналов, обработку данных, управление мощностью, обработку ввода/вывода и/или любую другую функцию, которая позволяет WTRU 102 работать в среде беспроводной связи. Процессор 118 может быть сопряжен с приемопередатчиком 120, который может быть сопряжен с передающим/приемным элементом 122. Несмотря на то, что на фиг. 1B процессор 118 и приемопередатчик 120 показаны в виде отдельных компонентов, следует понимать, что процессор 118 и приемопередатчик 120 могут быть совместно встроены в электронный блок или микросхему.
Передающий/приемный элемент 122 может быть выполнен с возможностью передачи сигналов на или приема сигналов от базовой станции (например, базовой станции 114a) по радиоинтерфейсу 116. Например, в одном варианте осуществления передающий/приемный элемент 122 может быть антенной, выполненной с возможностью передачи и/или приема РЧ-сигналов. В другом варианте осуществления передающий/приемный элемент 122 может быть излучателем/детектором, выполненным с возможностью передачи и/или приема, например, сигналов в ИК-спектре, УФ-спектре или спектре видимого света. В еще одном варианте осуществления передающий/приемный элемент 122 может быть выполнен с возможностью передачи и приема сигналов как в РЧ-спектре, так и в спектре видимого света. Следует понимать, что передающий/приемный элемент 122 может быть выполнен с возможностью передачи и/или приема любой комбинации радиосигналов.
Кроме того, несмотря на то что на фиг. 1B передающий/приемный элемент 122 показан как отдельный элемент, WTRU 102 может включать в себя любое число передающих/приемных элементов 122. Более конкретно, WTRU 102 может использовать технологию MIMO. Таким образом, в одном варианте осуществления WTRU 102 может включать в себя два или более передающих/приемных элемента 122 (например, множество антенн) для передачи и приема радиосигналов по радиоинтерфейсу 116.
Приемопередатчик 120 может быть выполнен с возможностью модуляции сигналов, которые подлежат передаче посредством передающего/приемного элемента 122, а также с возможностью демодуляции сигналов, которые принимаются посредством передающего/приемного элемента 122. Как отмечено выше, WTRU 102 может иметь многорежимные возможности. Таким образом, приемопередатчик 120 может включать в себя множество приемопередатчиков для обеспечения для WTRU 102 возможности взаимодействия посредством множества RAT, таких как, например, UTRA и IEEE 802.11.
Процессор 118 WTRU 102 может быть сопряжен, а также может принимать данные, вводимые пользователем через динамик/микрофон 124, клавиатуру 126 и/или дисплей/сенсорную панель 128 (например, жидкокристаллический дисплей (LCD) или дисплей на органических светодиодах (OLED)). Процессор 118 также может выводить пользовательские данные на динамик/микрофон 124, клавиатуру 126 и/или дисплей/сенсорную панель 128. Кроме того, процессор 118 может осуществлять доступ к информации, а также сохранять данные в подходящей памяти любого типа, такой как несъемная память 130 и/или съемная память 132. Несъемная память 130 может включать в себя оперативную память (RAM), постоянную память (ROM), жесткий диск или запоминающее устройство любого другого типа. Съемная память 132 может включать в себя карту модуля идентификации абонента (SIM), карту памяти, безопасную цифровую карту памяти (SD) и т.п. В других вариантах осуществления процессор 118 может осуществлять доступ к информации, а также сохранять данные в памяти, которая физически не размещается в WTRU 102, как, например, на сервере или домашнем компьютере (не показано).
Процессор 118 может получать питание от источника питания 134, а также может быть выполнен с возможностью распределения и/или управления питанием на другие компоненты в WTRU 102. Источник питания 134 может быть любым подходящим устройством для подачи питания на WTRU 102. Например, источник питания 134 может включать в себя одну или более сухих батарей (например, никель-кадмиевых (NiCd), никель-цинковых (NiZn), гибридных никелевых (NiMH), литий-ионных (Li-ion) и т. д.), солнечных элементов, топливных элементов и т. п.
Процессор 118 также может быть сопряжен с набором микросхем GPS 136, который может быть выполнен с возможностью предоставления информации о местоположении (например, долготы и широты) в отношении текущего местоположения WTRU 102. В дополнение или вместо информации от набора микросхем GPS 136 WTRU 102 может принимать информацию о местоположении по радиоинтерфейсу 116 от базовой станции (например, от базовых станций 114a, 114b) и/или определять свое местоположение на основе синхронизации сигналов, принимаемых от двух или более соседних базовых станций. Следует понимать, что WTRU 102 может принимать информацию о местоположении посредством любого подходящего способа определения местоположения и в то же время соответствовать варианту осуществления.
Процессор 118 может быть дополнительно сопряжен с другими периферийными устройствами 138, которые могут включать в себя один или более программных и/или аппаратных модулей, которые обеспечивают дополнительные возможности, функции и/или возможности по установлению проводной или беспроводной связи. Например, периферийные устройства 138 могут включать в себя акселерометр, электронный компас, спутниковый приемопередатчик, цифровую камеру (для осуществления фото- и видеосъемки), порт универсальной последовательной шины (USB), вибрационное устройство, телевизионный приемопередатчик, гарнитуру связи hands free, модуль Bluetooth®, FM-радиовещания, цифровой музыкальный проигрыватель, мультимедийный проигрыватель, модуль воспроизводящего устройства для видеоигр, Интернет-браузер и т.п.
Фиг. 1C представляет собой системную схему RAN 104 и базовой сети 106 в соответствии с вариантом осуществления. Как отмечено выше, RAN 104 может использовать технологию радиосвязи E-UTRA для взаимодействия с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. RAN 104 также может взаимодействовать с базовой сетью 106.
RAN 104 может включать в себя станции eNode B (eNB) 140a, 140b, 140c, хотя следует понимать, что RAN 104 может включать в себя любое число станций eNode-B и в то же время соответствовать варианту осуществления. Каждая станция eNode-B 140a, 140b, 140c может включать в себя один или более приемопередатчиков для взаимодействия с WTRU 102a, 102b, 102c по радиоинтерфейсу 116. В одном варианте осуществления станции eNode B 140a, 140b, 140c могут реализовывать технологию MIMO. Таким образом, например, станция eNode B 140a может использовать множество антенн для передачи радиосигналов на WTRU 102a и прием радиосигналов от него.
Каждая из станций eNode B 140a, 140b, 140c может быть связана с конкретной сотой (не показана) и может быть выполнена с возможностью обработки решений, связанных с управлением ресурсами радиосвязи, решений, связанных с передачей обслуживания, планирования пользователей в восходящей линии связи и/или нисходящей линии связи и т. п. Как показано на фиг. 1C, станции eNode B 140a, 140b, 140c могут взаимодействовать друг с другом по интерфейсу X2.
Базовая сеть 106, показанная на фиг. 1C, может включать в себя узел управления мобильностью (MME) 142, обслуживающий шлюз 144 и шлюз 146 сети с пакетной передачей данных (PDN). Несмотря на то что каждый из вышеперечисленных элементов показан как часть базовой сети 106, следует понимать, что любой из этих элементов может принадлежать и/или предоставляться для использования субъектом, отличным от оператора базовой сети.
MME 142 может быть подключен к каждой станции eNode B 140a, 140b, 140c в RAN 104 посредством интерфейса S1 и может служить в качестве узла управления. Например, MME 142 может отвечать за аутентификацию пользователей WTRU 102a, 102b, 102c, активацию/деактивацию однонаправленных каналов, выбор конкретного обслуживающего шлюза во время начального подсоединения боков WTRU 102a, 102b, 102c и т.п. MME 142 также может обеспечивать функцию панели управления для коммутации между RAN 104 и другими RAN (не показаны), которые используют другие технологии радиосвязи, например, GSM или WCDMA.
Обслуживающий шлюз 144 может быть подключен к каждой станции eNode B 140a, 140b, 140c в RAN 104 посредством интерфейса S1. Обслуживающий шлюз 144 может по существу направлять и пересылать пакеты данных пользователя на WTRU 102a, 102b, 102c и от них. Обслуживающий шлюз 144 может также выполнять другие функции, такие как привязка плоскостей пользователя во время передачи обслуживания между станциями eNode B, инициирование пейджинга, когда данные в нисходящей линии связи доступны для WTRU 102a, 102b, 102c, управление и хранение контекста WTRU 102a, 102b, 102c и т. п.
Обслуживающий шлюз 144 может быть также подключен к PDN-шлюзу 146, который может предоставлять WTRU 102a, 102b, 102c доступ к сетям с коммутацией пакетов, таким как сеть Интернет 110, для облегчения взаимодействия между WTRU 102a, 102b, 102c и устройствами с поддержкой протокола IP.
Базовая сеть 106 может облегчать взаимодействие с другими сетями. Например, базовая сеть 106 может предоставлять WTRU 102a, 102b, 102c доступ к сетям с коммутацией каналов, таким как PSTN 108, для облегчения взаимодействия между WTRU 102a, 102b, 102c и традиционными устройствами связи наземной линии связи. Например, базовая сеть 106 может включать в себя или может взаимодействовать с IP-шлюзом (например, сервером мультимедийной IP-подсистемы (IMS)), который служит в качестве интерфейса между базовой сетью 106 и сетью PSTN 108. Кроме того, базовая сеть 106 может предоставлять WTRU 102a, 102b, 102c доступ к сетям 112, которые могут включать в себя другие проводные или беспроводные сети связи, которые принадлежат и/или предоставляются для использования другими поставщиками услуг.
Другая сеть 112 может быть дополнительно подключена к беспроводной локальной сети на основе IEEE 802.11 (WLAN) 160. WLAN 160 может включать в себя маршрутизатор 165 доступа. Маршрутизатор доступа может иметь функции шлюза. Маршрутизатор 165 доступа может взаимодействовать с множеством точек 170a, 170b доступа (AP). Связь между маршрутизатором 165 доступа и точками 170a, 170b доступа может осуществляться посредством проводного протокола связи Ethernet (стандарты IEEE 802.3) или протокола беспроводной связи любого типа. AP 170a находится в беспроводной связи с WTRU 102d по радиоинтерфейсу.
В настоящем документе применяются следующие сокращения и аббревиатуры:
Технология мобильной связи непрерывно эволюционирует и достигла своего пятого уровня воплощения — 5G. Как и в предыдущих поколениях, появление новых сфер применения в значительной степени способствовало определению требований для нового поколения. Радиоинтерфейс 5G может обеспечивать применение в следующих областях, без ограничений: широкополосная связь с улучшенными характеристиками (IBB), промышленное управление и связь (ICC), транспортное применение (V2X) и массовая межмашинная связь (mMTC). Такие варианты применения могут быть связаны с определенными требованиями к интерфейсу 5G, включая, без ограничений, поддержку фильтрации основной полосы сигнала в частотной области, поддержку сверхмалой задержки при передаче, поддержку сверхнадежной передачи и поддержку работы в режиме MTC (включая узкополосный режим).
Поддержка фильтрации основной полосы сигнала в частотной области может включать несколько конструктивных факторов. Например, такие конструктивные факторы могут включать в себя возможности, связанные с фильтрацией основной полосы сигнала в частотной области для обеспечения эффективного объединения спектра (например, общего спектра до 150–200 МГц в пределах данного канала РЧ-приемопередатчика), независимо от изменений конструкции входного каскада.
Для объединения спектра в разделенных на большие интервалы рабочих полосах (например, 900 МГц и 3,5 ГГц) можно применять множество цепей РЧ-приемопередатчика на основе требований к размеру антенны и ограничений конструкции для оптимизации усилителя. Например, реализация WTRU может включать в себя три отдельных канала РЧ-приемопередатчика: первый канал РЧ-приемопередатчика ниже 1 ГГц, второй канал РЧ-приемопередатчика для диапазона частот 1,8–3,5 ГГц и третий канал РЧ-приемопередатчика, охватывающий диапазон частот 4–6 ГГц. Стандартная встроенная поддержка для конфигураций многоэлементной антенны Massive MIMO также может являться требованием второго порядка.
В различных вариантах применения (например, IBB) может потребоваться, чтобы множество полос частот со спектрами различных размеров были эффективно объединены для достижения скоростей передачи данных (например, от порядка приблизительно нескольких десятков Мбит/с (граница соты) до максимальной скорости передачи данных несколько Гбит/с (например, до 8 Гбит/с) с типовыми скоростями порядка нескольких сотен Мбит/с).
Поддержка сверхмалой задержки при передаче также может относиться к нескольким конструктивным аспектам. Например, задержка радиоинтерфейса, равная лишь 1 мс RTT, может потребовать поддержки TTI приблизительно от 100 мкс до (не более) 250 мкс.
Также может представлять интерес поддержка доступа со сверхмалой задержкой (например, время от первоначального доступа к системе до завершения передачи первого блока данных в плоскости пользователя). Например, для IC и V2X может потребоваться конкретное время задержки между конечными пунктами (e2e). Такая e2e-задержка может составлять менее 10 мс.
Поддержка сверхнадежной передачи также может предполагать несколько конструктивных факторов. Один из таких конструктивных факторов может включать в себя надежность передачи, которая значительно выше возможной в настоящее время для прежних LTE-систем. Например, целевой показатель надежности передачи может составлять 99,999% успеха передачи и доступности обслуживания. Другой фактор может представлять собой поддержку мобильности на скоростях в диапазоне 0–500 км/ч. Например, для IC и V2X может потребоваться обеспечение определенного коэффициента потери пакетов. Такой коэффициент потери пакетов может составлять менее 10e-6.
Обеспечение поддержки работы в режиме MTC (включая узкополосный режим) может предполагать несколько конструктивных факторов. Например, для эффективной поддержки работы в узкой полосе (например, работы с применением ширины полосы пропускания менее 200 кГц) может потребоваться радиоинтерфейс, может потребоваться увеличение срока службы батареи (например, до 15 лет автономности) и может потребоваться обеспечение минимальных потерь пропускной способности для небольших и нечастых сеансов передачи данных (например, с низкими скоростями передачи данных в диапазоне 1–100 кбит/с с задержкой доступа от секунд до часов).
Для поддержки применения mMTC может потребоваться работа в узкой полосе. Итоговый бюджет канала связи должен быть сопоставим с бюджетом расширенного покрытия LTE с поддержкой очень большого числа устройств MTC (до 200 000/км2) без негативного влияния на спектральную эффективность в отношении других поддерживаемых услуг.
Примеры вышеописанных требований могут, в свою очередь, относиться к следующим конструктивным факторам.
Конструкция системы 5G может обеспечивать гибкое применение спектра, стратегий развертывания и работы. Конструкция может поддерживать работу с использованием блоков спектра или спектров разного размера, включая объединение несмежных несущих в одном частотном диапазоне и/или в разных частотных диапазонах, лицензированных или нелицензированных. Кроме того, система может поддерживать работу в узкой полосе и широкой полосе, различные способы дуплексной передачи (а для TDD — динамически изменяемое выделение DL/UL), различные длительности TTI, регламентированную и нерегламентированную передачу, синхронную и асинхронную передачу, отделение плоскости пользователя от плоскости управления и многоузловую связь.
Конструкция системы 5G может быть интегрирована с рядом прежних аспектов (E-)UTRAN и EPC/CN. Несмотря на возможное отсутствие требований к обратной совместимости можно ожидать, что система будет выполнена с возможностью интеграции и/или работы с прежними интерфейсами (или их модификациями). Например, система может обладать обратной совместимостью по меньшей мере с прежней CN (например, с интерфейсом S1, NAS) и eNB (например, с интерфейсом X2, включая двустороннюю связь с LTE), а также обеспечивать возможность использования прежних аспектов, таких как поддержка существующего QoS и механизмов безопасности. Кроме того, могут быть учтены и другие функциональные возможности, поддерживаемые прежними системами. Например, может быть обеспечена поддержка операции D2D/Sidelink, операции LAA с помощью LBT и ретрансляции.
Гибкая система радиодоступа для 5G (5gFLEX) может быть основана на ряде основных принципов. OFDM используют в качестве основного формата сигнала для передачи данных как в LTE, так и в IEEE 802.11. OFDM эффективно делит спектр на множество параллельных ортогональных подполос. Каждая поднесущая может быть сформирована с помощью прямоугольного окна во временной области с получением поднесущих одинаковой формы в частотной области. Таким образом, OFDMA может потребовать идеальной синхронизации частоты и жесткого управления тактовой синхронизацией восходящей линии связи (UL) на протяжении длительности циклического префикса для поддержки ортогональности между сигналами и сведения к минимуму помех между несущими. Такая синхронизация также может быть неприменима для системы, в которой WTRU одновременно подключается к множеству точек доступа. Дополнительное снижение мощности также обычно применяют в отношении передачи по восходящей линии связи для соответствия требованиям к внеполосному (OOB) излучению или спектральному излучению (например, для смежных полос), в частности, при объединении фрагментированного спектра для передачи с WTRU.
Некоторые из недостатков обычного OFDM (CP-OFDM) можно устранить при применении более жестких требований к РЧ-связи для вариантов применения, в частности, при работе с большим числом смежных спектров, не требующих объединения. Применение схемы передачи OFDM на основе CP также может приводить к тому, что физический уровень нисходящей линии связи для 5G будет аналогичен физическому уровню прежней системы (например, преимущественно с изменениями плотности и местоположения контрольного).
Соответственно, можно сосредоточивать внимание на других возможных сигналах для конструкции 5gFLEX, хотя обычный OFDM остается возможным потенциальным вариантом для систем 5G, по меньшей мере для схемы передачи по нисходящей линии связи (DL). В настоящем документе дополнительно описаны различные принципы разработки гибкого радиодоступа для 5G, основанные на базовых технологиях, уже известных из обычных OFDMA-систем и прежних LTE-систем.
Схема передачи по нисходящей линии связи 5gFLEX может быть основана на сигнале с множеством несущих, который может характеризоваться существенными ограничениями по частотному спектру (т. е. нижними боковыми лепестками и более низким OOB-излучением). В частности, возможные варианты МС-сигнала для 5G включают в себя OFDM-OQAM и UFMC (UF-OFDM). Модуляционные сигналы с множеством несущих могут делить канал на подканалы и модулировать символы данных на поднесущих в этих подканалах.
С помощью OFDM-OQAM для уменьшения OOB к сигналу OFDM может применяться фильтр во временной области на поднесущей. OFDM-OQAM может создавать очень незначительные помехи для смежных полос, может отсутствовать необходимость в больших защитных полосах и циклическом префиксе. OFDM-OQAM может быть самой популярной методикой реализации FBMC. Однако OFDM-OQAM может быть чувствителен к эффектам многолучевого распространения волн и высокому разбросу задержки с точки зрения ортогональности, что усложняет выравнивание и анализ канала.
С помощью UFMC (UF-OFDM) для уменьшения OOB к сигналу OFDM также может применяться фильтр во временной области. Однако фильтрация может применяться в каждой подполосе для использования фрагментов спектра, что, таким образом, потенциально снижает сложность и делает UF-OFDM в какой-то мере более удобным для реализации. Однако если в полосе имеется один или более неиспользуемых фрагментов спектра, OOB-излучение в этих фрагментах может оставаться таким же высоким, как и в обычном OFDM. Иными словами, UF-OFDM может улучшать OFDM только на границах отфильтрованного спектра, но не в спектральном канале.
Применимость описанных в настоящем документе способов не ограничена приведенными выше сигналами. Они могут быть применимы к другим сигналам. Вышеуказанные сигналы дополнительно будут использоваться в настоящем документе для иллюстративных целей.
Такие сигналы могут обеспечивать частотное мультиплексирование сигналов с неортогональными характеристиками (например, с отличным разносом поднесущих) и одновременное использование асинхронных сигналов без необходимости использовать сложные приемники для подавления помех. Такие сигналы также могут облегчать объединение фрагментированных участков спектра при обработке основной полосы частот в качестве более экономичной альтернативы реализации такого объединения в рамках РЧ-обработки.
Одновременное использование различных сигналов в одной и той же полосе может применяться, например, для поддержки работы mMTC в узкой полосе (например, с использованием SCMA). Другой пример может включать в себя поддержку комбинации различных сигналов в пределах одной и той же полосы (например, CP-OFDM, OFDM-OQAM и UF-OFDM для всех аспектов и для передачи как по нисходящей линии связи, так и по восходящей линии связи).
В схеме передачи по восходящей линии связи 5gFLEX может использоваться тот же или другой сигнал по сравнению с передачами по нисходящей линии связи. Мультиплексирование передач на разные WTRU и из разных WTRU в одной и той же соте может быть основано на FDMA и TDMA.
Описанные в настоящем документе способы, устройства и системы могут быть, в частности, выполнены с возможностью применения в системах 5G, а также в модификациях других существующих систем, таких как системы LTE, или в модификациях других беспроводных технологий, таких как HSPA, WiFi/IEEE 802.11 или т. п. Например, некоторые из предложенных способов, устройств и систем могут быть обратно совместимыми с существующими технологиями. Например, для обеспечения сверхмалой задержки при использовании другого сигнала может поддерживаться TTI, который короче интервала LTE (0,5 мс). Кроме того, может обеспечиваться поддержка работы физического уровня 5G (DL и/или UL) в TDM и/или в FDM с LTE.
Модель радиодоступа 5gFLEX может характеризоваться очень высокой степенью гибкости спектра, что позволяет осуществлять развертывание в разных полосах частот с различными характеристиками, включая применение разных дуплексных конструкций и разных и/или переменных размеров доступного спектра, включая выделение смежных и несмежных спектров в одних и тех же или в разных полосах. Кроме того, модель радиодоступа 5gFLEX может поддерживать аспекты непостоянной синхронизации, включая поддержку множества длин TTI и поддержку асинхронных передач.
5gFLEX может поддерживать обе схемы дуплексирования — TDD и FDD. Для операции FDD может поддерживаться дополнительная работа по нисходящей линии связи с использованием объединения спектра. Операция FDD может представлять собой как полнодуплексную FDD, так и полудуплексную операцию FDD. Для операции TDD выделение DL/UL может быть динамическим, т. е. оно может быть основано не на фиксированной конфигурации кадра DL/UL; напротив, длина интервала передачи DL или UL может устанавливаться для потенциальной передачи.
Модель 5gFLEX позволяет использовать различные значения ширины полосы пропускания при передаче как по восходящей линии связи, так и по нисходящей линии связи, от какого-либо значения номинальной ширины полосы пропускания системы до максимального значения, соответствующего ширине полосы пропускания системы.
Фиг. 2 представляет собой схему, на которой изображены примеры некоторых из значений ширины полосы пропускания системы при передаче, поддерживаемых примером системы 200 5gFLEX. Для работы с одной несущей поддерживаемые значения ширины полосы пропускания системы могут включать в себя по меньшей мере 5, 10, 20, 40 и 80 МГц. В некоторых вариантах осуществления значения поддерживаемой ширины полосы пропускания системы могут включать в себя любую ширину полосы пропускания в заданном диапазоне (например, от нескольких МГц до 160 МГц). Номинальная ширина полосы пропускания может иметь одно или более фиксированных возможных значений. Также может обеспечиваться поддержка 160 МГц и номинальной ширины полосы пропускания системы (например, 5 МГц). Для устройств MTC могут поддерживаться узкополосные передачи до 200 кГц в пределах рабочей ширины полосы пропускания. Следует отметить, что ширина полосы пропускания 201 системы в контексте настоящего документа может относиться к наибольшей части спектра, которой может управлять сеть для данной несущей. Для такой несущей часть спектра, минимально поддерживаемая WTRU для обнаружения соты, выполнения измерений и начального доступа к сети, в настоящем документе может называться номинальной шириной полосы пропускания 202 системы. WTRU может быть сконфигурирован с шириной полосы пропускания 203, 204 и 205, которая входит в диапазон полной ширины полосы пропускания системы. Сконфигурированная ширина полосы пропускания 203, 204 и 205 канала WTRU может включать или может не включать в себя номинальную ширину полосы пропускания 202 системы, которая представляет собой часть ширины полосы пропускания 201 системы. Гибкость использования ширины полосы пропускания можно обеспечить благодаря тому, что все применимые наборы требований к РЧ-связи для заданной максимальной рабочей ширины полосы пропускания в полосе могут быть выполнены без введения дополнительных разрешенных значений ширины полосы пропускания канала для этой рабочей полосы вследствие эффективной поддержки фильтрации основной полосы для сигнала в частотной области.
Ширина полосы пропускания канала WTRU для работы с одной несущей может быть сконфигурирована, переконфигурирована и/или динамически изменена, а спектр для узкополосных передач может быть выделен в пределах номинальной системы, системы или сконфигурированной ширины полосы пропускания канала.
Физический уровень 5gFLEX может быть независимым от полосы и может поддерживать работу в лицензированных полосах частот (например, ниже 5 ГГц), а также работу в нелицензированных полосах частот (например, в диапазоне 5–6 ГГц). Для работы в таких нелицензированных полосах может поддерживаться платформа доступа канала на основе LBT Cat 4, аналогичная LTE LAA.
Специфические для соты и/или специфические для WTRU значения ширины полосы пропускания канала для произвольных размеров блока спектра также могут быть масштабированы, и ими можно управлять (например, осуществлять диспетчеризацию, адресацию ресурсов, передачу сигналов, измерения).
Как описано в настоящем документе, 5gFLEX может поддерживать гибкое выделение спектра. Каналы и сигналы управления нисходящей линии связи могут поддерживать операцию FDM. WTRU может получать несущую нисходящей линии связи, принимая передачи с использованием лишь номинальной части ширины полосы пропускания системы. Иными словами, для WTRU может изначально не требоваться прием передач, охватывающих всю ширину полосы пропускания, которой управляют с помощью сети для конкретной несущей.
Каналы данных нисходящей линии связи могут быть выделены по ширине полосы пропускания, которая может соответствовать или может не соответствовать номинальной ширине полосы пропускания системы без ограничений, за исключением того, что она находится в пределах сконфигурированной ширины полосы пропускания канала WTRU. Например, сеть может работать с несущей с шириной полосы пропускания системы 12 МГц с использованием номинальной ширины полосы пропускания 5 МГц, позволяющей устройствам поддерживать максимальную ширину полосы пропускания РЧ-диапазона не более 5 МГц для приема и доступа к системе, в то время как возможно выделение частоты несущей от +10 до -10 МГц на другие WTRU, поддерживающие значения ширины полосы пропускания канала до 20 МГц.
Фиг. 3 представляет собой схему примера гибкого выделения 300 спектра. Ширина полосы пропускания 301 системы может поддерживать выделение спектра с переменными характеристиками 302 передачи и номинальной шириной полосы пропускания 303 системы. В примере на фиг. 3 разные поднесущие 304 могут быть по меньшей мере теоретически назначены для различных режимов работы (например, режима работы со спектром (SOM)). Разные SOM могут использоваться для выполнения разных требований к разным передачам. SOM может включать в себя разнесение поднесущих, определение длины TTI и/или одному или более аспектов надежности (например, аспектов обработки гибридного автоматического запроса на повторение передачи (HARQ)), а также, возможно, вторичного канала управления. SOM может относиться к конкретному сигналу или аспекту обработки (например, поддерживать одновременное использование разных сигналов в одной и той же несущей с помощью FDM и/или TDM, или поддерживать одновременное использование операции FDD в полосе TDD в режиме TDM, или иное).
WTRU может быть выполнен с возможностью осуществления передач в соответствии с одним или более SOM. Например, SOM может соответствовать передачам, при которых используют по меньшей мере одно из следующего: конкретную длительность TTI, конкретный начальный уровень мощности, конкретный тип обработки HARQ, конкретную верхнюю границу для успешного приема/передачи HARQ, конкретный режим передачи, конкретный физический канал (восходящую линию связи или нисходящую линию связи), конкретный тип сигнала или передачу в соответствии с конкретной RAT (например, прежний LTE или в соответствии со способом передачи 5G). SOM может соответствовать уровню QoS и/или связанному аспекту, например, максимальной/целевой задержке, максимальной/целевой BLER или аналогичным. SOM может соответствовать области спектра и/или конкретному каналу управления или его аспекту (включая пространство поиска, тип DCI и т. д.).
Для работы с одной несущей может поддерживаться объединение спектра. При объединении спектра WTRU может поддерживать передачу и прием множества транспортных блоков посредством смежных или несмежных наборов блоков физических ресурсов (PRB) в пределах одной и той же рабочей полосы. Также для выделения наборов PRB может быть сопоставлен отдельный транспортный блок.
Осуществление одновременных передач может быть связано с разными требованиями SOM. Работа с множеством несущих может также поддерживаться с использованием смежных или несмежных блоков спектра в пределах одной и той же рабочей полосы или в двух или более рабочих полосах. Кроме того, может также поддерживаться объединение блоков спектра с использованием разных режимов (например, FDD и TDD) и использованием разных способов доступа к каналу (например, операции в лицензированной и нелицензированной полосе ниже 6 ГГц). Объединение множества несущих WTRU может быть сконфигурировано, переконфигурировано или динамически изменено.
Эффективная фильтрация основной полосы частот в частотной области может иметь преимущество, которое заключается в том, что обеспечивается высокая гибкость объединения спектра и поддержка дополнительных каналов или комбинаций полос без необходимости использования РЧ-спецификации.
Функция диспетчеризации может поддерживаться на MAC-уровне. Могут поддерживаться режимы диспетчеризации, включающие в себя, без ограничений, следующие: сетевую диспетчеризацию для ограниченной диспетчеризации с точки зрения ресурсов, параметров синхронизации и передач по нисходящей линии связи и/или восходящей линии связи и WTRU-диспетчеризацию для обеспечения более высокой гибкости с точки зрения параметров синхронизации и передачи. В обоих режимах информация диспетчеризации может быть действительна для одного или для множества TTI.
Сетевая диспетчеризация может позволять сети жестко управлять доступными радиоресурсами, назначенными разным WTRU, например, для оптимизации совместного использования таких ресурсов. Такая сетевая диспетчеризация может быть динамической.
WTRU-диспетчеризация может позволять WTRU гибко осуществлять доступ к ресурсам восходящей линии связи с минимальной задержкой на основе потребности в наборе общих или выделенных ресурсов восходящей линии связи, назначенных (динамически или не динамически) сетью. Могут поддерживаться как синхронизированные, так и несинхронизированные спонтанные передачи и могут поддерживаться как конкурентные передачи, так и бесконкурентные передачи.
Поддержка спонтанных передач (регламентированных или нерегламентированных) может обеспечивать преимущество, которое заключается в удовлетворении требований сверхмалой задержки для 5G и требований экономии энергии в случае использования mMTC.
Гибкое кадрирование может использоваться в системах беспроводной связи, таких как система 5gFLEX, для передач по нисходящей линии связи и восходящей линии связи. Передачи по нисходящей линии связи и восходящей линии связи могут быть организованы в радиокадры, характеризуемые рядом фиксированных аспектов (например, местоположением информации управления нисходящей линии связи) и рядом переменных характеристик (например, временем передачи, поддерживаемыми типами передачи). Один или более таких аспектов могут отличаться с точки зрения распределения радиокадров между разными типами передач, между передачами с одного и того же WTRU (например, по специфической для режима работы со спектром (SOM) структуре кадра), между передачами с разных WTRU (например, по специфической для WTRU структуре кадра) и между передачами в направлении нисходящей линии связи и в направлении восходящей линии связи. Временные зависимости, поддерживаемые гибкой структурой кадра, могут быть указаны для WTRU динамически или полустатически, как показано в примерах, описанных в настоящем документе.
Временной интервал передачи (TTI) может представлять собой минимальное время, поддерживаемое системой между последовательными передачами, где каждая передача может быть связана с разными транспортными блоками (ТВ) для нисходящей линии связи (TTIDL) и для восходящей линии связи (UL TRx), исключая любую преамбулу (если применимо), но включая любую информацию управления (например, информацию управления нисходящей линии связи (DCI) или информацию управления восходящей линии связи (UCI)). TTI может быть выражен в виде целого числа одного или более базовых временных интервалов (BTI).
BTI может быть выражен в виде целого числа одного или более символов, где длительность символа может являться функцией интервала между поднесущими, применимого к частотно-временному ресурсу. Таким образом, для FDD интервал между поднесущими может отличаться между частотой fUL несущей восходящей линии связи и частотой fDL несущей нисходящей линии связи для данного кадра. BTI также может быть выражен в виде прежней временной структуры, такой как прежний TTI.
Поддерживаемые значения длительности кадров могут включать в себя, например, по меньшей мере 100 мкс, 125 мкс (1/8 мс), 142,85 мкс (1/7 мс представляет собой 2 символа LTE OFDM с нормальным циклическим префиксом) и 1 мс для обеспечения согласования с прежней временной структурой LTE.
Фиг. 4 представляет собой схему примера гибкой структуры 400 кадра для TDD, которая может использоваться в системе беспроводной связи, такой как система 5gFLEX, в соответствии с одним вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. Как показано в примере на фиг. 4, начало каждого кадра может быть указано посредством информации управления 401a и 401b нисходящей линии связи (DCI) с фиксированной длительностью tdci 412a и 412b, предшествующей любой порции DL-передачи каждого кадра (DL TRx) 402a и 402b для рассматриваемой частоты fUL+DL несущей. Длительность порций 402а и 402b DL-передачи может быть основана на целом числе передаваемых блоков (ТВ).
В примере на фиг. 4 DCI 401a может указывать по меньшей мере длительность tDL(n) 405a для порции 402a DL TRx для кадра n, а DCI 401b может указывать по меньшей мере длительность tDL(n+1) 405b для порции 402b DL TRx для кадра n + 1 в дополнение к любому (-ым) выделению (-ям) нисходящей линии связи и/или любому (-ым) предоставлению (-ям) восходящей линии связи, указанным с помощью DCI 401a и 401b.
Кадр также может включать в себя порцию UL-передачи кадра (UL TRx) 403a и 403b. Длительность порций 403а и 403b UL-передачи может быть основана на целом числе передаваемых блоков (ТВ). В примере на фиг. 4 DCI 401a может указывать по меньшей мере длительность tUL(n) 406a для порции 403a UL TRx для кадра n, а DCI 401b может указывать по меньшей мере длительность tUL(n+1) 406b для порции 403b UL TRx для кадра n + 1. Если присутствует порция восходящей линии связи кадра, как показано в примере на фиг. 4, интервал коммутации (SWG) 404a и 404b может предшествовать порции восходящей линии связи каждого кадра.
После этого WTRU может определять итоговую длительность TTI для каждого кадра на основе DCI 401a и 401b. Как показано в примере на фиг. 4, переменная длительность каждого кадра может быть выражена через длительность TTI, выраженную в виде целого числа BTI. В примере на фиг. 4 длительность кадра n выражена через TTIn, выраженного в виде x*BTI 409a, а длительность кадра n + 1 выражается через TTIn+1, выраженный в виде y*BTI 409b. В примере на фиг. 4 также показан интервал (ISS) 411 между подкадрами.
Для TDD 5gFLEX может поддерживать операцию Sidelink (прямое соединение) для целей обмена данными между устройствами (D2D) или между любым абонентом и подвижным объектом (V2X) в структуре 400 кадра путем включения в DCI и порцию DL TRx соответствующего управления нисходящей линии связи и передач в прямом направлении по нисходящей линии связи (в случае использования полустатического выделения соответствующих ресурсов). Альтернативно операция Sidelink для целей связи в режиме D2D или V2X может поддерживаться в структуре 400 кадра посредством включения соответствующего управления нисходящей линии связи и передач в прямом направлении по нисходящей линии связи только в порцию DL TRx (для динамического выделения). Соответствующая передача в обратном направлении для операции Sidelink для целей связи в режиме D2D или V2X может быть включена в порцию UL TRx структуры 400 кадра.
Следует отметить, что указание или конфигурация tDL и/или tUL может соответствовать настройке, где отсутствуют порция DL TRx и/или UL TRx. Это может быть целесообразно в случае, когда регламентированы только DL- или только UL-передачи.
Фиг. 5 представляет собой схему примера структуры 500 кадра для FDD, которая может использоваться в системе беспроводной связи, такой как система 5gFLEX, в соответствии с другим вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. Структура 500 кадра может включать в себя опорный TTI нисходящей линии связи и один или более TTI восходящей линии связи. Как показано в примере на фиг. 5, начало кадра может быть указано DCI 501a и 501b с фиксированной длительностью tdci 506a и 506b, предшествующей любой порции передачи данных по нисходящей линии связи (DL TRx) 502a и 502b для рассматриваемой частоты fDL несущей. Длительность порций 502а и 502b DL-передачи может быть основана на целом числе передаваемых блоков (ТВ).
В примере на фиг. 5 DCI 501a может указывать длительность tDL(n) 507a TTI для порции 502a DL TRx для кадра n, а DCI 501b может указывать длительность tDL(n+1) 507b TTI для порции 502b DL TRx для кадра n + 1. Как показано в примере на фиг. 5, переменная длительность каждого кадра может быть выражена через длительность опорных TTI нисходящей линии связи, выраженных в виде целого числа BTI. В примере на фиг. 5 длительность кадра n выражена через TTIDL(n), выраженный в виде x*BTI 509a, а длительность кадра n + 1 выражена через TTIDL(n+1), выраженный в виде y*BTI 509b.
DCI может указывать смещение (toffset) 505 и длительность TTI для любой применимой передачи (передач) по восходящей линии связи, которая содержит транспортный блок. Отдельные DCI также могут использоваться для направлений нисходящей линии связи и восходящей линии связи. В примере, показанном на фиг. 5, кадр может включать в себя порцию 503a, 503b и 503c передачи по восходящей линии связи (UL TRx) для рассматриваемой частоты fUL несущей. Длительность порций 503a, 503b и 503c UL-передачи может быть основана на целом числе передаваемых блоков (ТВ). Начало TTI восходящей линии связи может быть определено с использованием смещения (toffset) 505, применяемого от начала опорного кадра нисходящей линии связи, который накладывается на начало кадра восходящей линии связи. toffset 505 может включать в себя время задержки ответного сигнала, например, в случаях, когда применима UL-синхронизации. В примере на фиг. 5 DCI 501a может указывать по меньшей мере длительность tUL(n,0) 508a и tUL(n,1) 508b для порций 503a и 503b UL TRx для кадра n. DCI 501b может указывать по меньшей мере длительность tUL(n+1,0) 508c для порции 503c UL TRx для кадра n + 1. В примере на фиг. 5 также показан ISS 504.
Для FDD 5gFLEX может поддерживать операцию Sidelink для целей связи в режиме D2D или V2X в порции UL TRx структуры 500 кадра посредством включения соответствующего управления нисходящей линии связи и передач в прямом и обратном направлениях по нисходящей линии связи в порцию UL TRx (может использоваться динамическое выделение соответствующих ресурсов).
Синхронизация/ресурс DL для HARQ A/N с использованием структуры 400 или 500 кадра также могут быть определены для передачи по восходящей линии связи. Время между передачей данных и соответствующим HARQ A/N может быть указано явно или неявно.
Следует отметить, что ISS может поддерживать асинхронную работу, если начало кадра определяют посредством обнаружения преамбулы (например, для доступа на базе лицензируемой полосы частот (LAA), массовой межмашинной связи (mMTC) и низкой задержки). Кроме того, следует отметить, что toffset может поддерживать задержки в обработке в диапазоне от 0 мкс до одной или более мс. toffset может поддерживать передачи на основе CP-OFDM за счет дополнительного включения времени задержки ответного сигнала (т. е. в таких случаях toffset ≥ времени задержки ответного сигнала). Кроме того, toffset может поддерживать синхронную зависимость DL/UL, если установлено значение, равное сумме требуемой задержки обработки и требуемого времени задержки ответного сигнала (0 мкс в случаях, когда это не требуется для применяемого сигнала). Этот случай может иметь место для операции FDD с учетом того, что не требуется поддерживать операцию «прием перед передачей» (LBT). toffset может поддерживать асинхронную диспетчеризацию информации управления восходящей линии связи (UCI), если UCI присутствует в начале порции UL TRx или если поддерживается диспетчеризация каналов управления восходящей линии связи.
Фиг. 6A представляет собой блок-схему примера процесса динамического определения структуры и синхронизации для переменного кадра 600, как описано выше. Хотя каждый этап процесса 600 на фиг. 6А показан и описан отдельно, множество этапов могут выполняться в порядке, отличном от показанного, параллельно друг с другом или одновременно друг с другом. WTRU посредством приемопередатчика или приемника WTRU, как описано выше, может принимать DCI 601, указывающую начало кадра. DCI может быть принята по каналу управления, такому как физический канал управления нисходящей линии связи (PDCCH), и от eNB, базовой станции, AP или другого оборудования инфраструктуры, работающего в системе беспроводной связи. WTRU может декодировать DCI, этап 602. WTRU может определять длительность TTI на основе принятого DCI, этап 603. Как описано выше, длительность TTI может быть выражена в виде целого числа BTI. WTRU может определять порцию DL-передачи и выделение DL-передачи на основе принятой DCI, этап 604. Затем WTRU может определять порцию UL-передачи и предоставление UL на основе принятой DCI, этап 605. Кроме того, WTRU может определять начало порции UL на основе смещения (toffset), которое указано в DCI. WTRU посредством приемопередатчика или приемника WTRU, как описано выше, может принимать данные в порции DL-передачи кадра на основе определенного выделения DL-передачи и длительности TTI, этап 606. WTRU посредством приемопередатчика или передатчика WTRU, как описано выше, может передавать данные в порции UL-передачи кадра на основе определенного предоставления UL и длительности TTI, этап 607.
Фиг. 6В представляет собой блок-схему примера процесса динамического конфигурирования структуры и синхронизации для переменного кадра, как описано выше. Хотя каждый этап процесса на фиг. 6В показан и описан отдельно, множество этапов могут выполняться в порядке, отличном от показанного, параллельно друг с другом или одновременно друг с другом. eNB (или базовая станция, AP или другое оборудование инфраструктуры, работающее в системе беспроводной связи) посредством приемопередатчика или передатчика eNB, как описано выше, может передавать DCI 611 на WTRU с указанием начала кадра. DCI может передаваться по каналу управления, такому как PDCCH. Переданная DCI может позволять WTRU определять длительность TTI на основе DCI. Переданная DCI может позволять WTRU определять порцию DL-передачи и выделение DL-передачи на основе DCI. Переданная DCI может позволять WTRU определять порцию UL-передачи и предоставление UL на основе DCI. Кроме того, переданная DCI может позволять WTRU определять начало порции UL на основе смещения (toffset). еNB посредством приемопередатчика или передатчика eNB, как описано выше, может передавать данные на WTRU в порции DL кадра на основе выделения DL-передачи и длительности TTI, этап 612. eNB посредством приемопередатчика или приемника eNB, как описано выше, может принимать данные в порции UL кадра на основе предоставления UL и длительности TTI, этап 613.
Фиг. 7 представляет собой блок-схему примера процесса передачи для гибкого кадрирования 700, который может использоваться в системе беспроводной связи, такой как система 5gFLEX, в соответствии с одним вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. Как показано на фиг. 7, если информация управления восходящей линии связи (UCI) передается только в порции UL TRx (например, в отсутствие транспортного (-ых) блока (-ов) UL для данного WTRU), WTRU может получать или принимать UCI-ресурсы, которые должны использоваться в порции UL TRx, этап 701. WTRU может получать или принимать UCI-ресурсы, которые должны использоваться, этап 701, с помощью одного способа или комбинации из нескольких способов, включая, без ограничений, следующее.
(1) Выделенные ресурсы для UCI, которые будут использоваться WTRU, могут быть получены из сконфигурированного набора ресурсов. Эти выделенные ресурсы могут быть специфичны для WTRU или могут быть связаны с более чем одним WTRU.
(2) UCI-ресурсы могут быть указаны для WTRU с использованием DCI.
(3) UCI-ресурсы, которые должны использоваться WTRU для передачи UCI в порции UL TRx, могут быть определены WTRU как функция параметров передачи, использованных для приема в предыдущей порции DL TRx. В первом примере местоположение частоты, и/или выделенная ширина полосы пропускания, и/или длительность передачи, и/или параметры кодирования канала данных, принятые WTRU в порции DL TRx, могут использоваться WTRU для определения параметров передачи для соответствующей передачи UCI с точки зрения ресурсов частотной области и параметров кодирования в порции UL TRx. Во втором примере WTRU может определять UCI-ресурсы, которые должны применяться, на основе параметров кодирования известной сигнальной последовательности, такой как пилотные символы и/или шаблоны. Один параметр или комбинация из двух или более из следующих параметров и/или других параметров могут использоваться для генерации такой известной последовательности WTRU для определения UCI-ресурсов: местоположение (-я) частоты, сгенерированная последовательность идентификаторов индекса, порядкового номера и номера кадра, синхронизация символа.
Как показано на фиг. 7, после этого WTRU может определять время 702 начала кадра (например, в отношении начала кадра, где может быть декодирован DCI) с использованием одного способа или комбинации из нескольких способов, включая, без ограничений, следующее.
(1) WTRU может определять начало передачи кадра путем измерения и определения наличия известной сигнальной последовательности. WTRU может искать известные сигнальные последовательности по частоте и/или времени в наборе возможных сигнальных последовательностей. В одном примере известная сигнальная последовательность может представлять собой набор (или может соответствовать набору) символов с фиксированным значением, распределенных в сетке выделения частоты/времени, в начале кадра. В другом варианте осуществления известная сигнальная последовательность может представлять собой сигнал преамбулы или соответствовать ему. При обнаружении известной сигнальной последовательности WTRU может определять присутствие DCI путем установления местоположения и возможных позиций события по частоте и/или времени как функции обнаруженной известной сигнальной последовательности.
(2) WTRU может определять начало кадра путем определения наличия или отсутствия кадра в ограниченном наборе возможных позиций по времени. В первом примере осуществления кадр может начинаться только в моменты времени ... 50, 100, 150, 200, ... микросекунд (мкс), но не в промежуточные моменты времени. Таким образом, WTRU, определив синхронизацию DL на основе полученных общих сигналов/каналов DL, может попытаться определить возможное начало передачи кадра DL только в эти точно известные моменты времени. Это решение может снижать уровень сложности и/или повышать надежность определения. В другом примере возможные моменты времени, в которые может начинаться передача кадра, определяются WTRU как функция передачи другого сигнала DL. Например, WTRU, получив опорный сигнал DL, может определять возможные позиции начала для передач кадров как функцию параметров передачи опорного сигнала DL.
Следует отметить, что временные параметры и моменты начала передач кадров могут быть специфичны для WTRU, могут совместно использоваться группой WTRU или могут быть общими для всех WTRU. Более того, в разных сигналах/каналах DL могут применяться разные конфигурации, связанные с временем передачи и возможными моментами начала. Например, для общего канала управления DL может использоваться время начала, которое является фиксированным и детерминированным по времени. Канал данных DL может использовать гибкое определение времени начала и событий как функцию данных, доступных для диспетчеризации.
Как показано на фиг. 7, после этого WTRU может определять, когда передавать обратную информацию UL HARQ, этап 703, для поддержки HARQ при передаче и приеме с использованием гибкого кадрирования. Следует отметить, что обратная информация HARQ в дальнейшем может относиться к биту (-ам) Ack, Nack или DTX или же эквивалентным индексированным преобразованиям, полученным приемником после приема транспортного (-ых) блока (-ов), отдельных или сгруппированных битов или индексов, полученных для одного или множества процессов HARQ. WTRU может определять, когда передавать обратную информацию UL HARQ, этап 703, с использованием одного способа или комбинации из нескольких способов, включая, без ограничений, следующее.
(1) Обратная информация DL HARQ для TB, принятая в порции DL TRx, может быть отправлена WTRU непосредственно после порции UL TRx того же кадра.
(2) Обратная информация DL HARQ для TB, принятая в порции DL TRx, может быть отправлена WTRU в настраиваемой порции UL TRx, где настраиваемая порция UL TRx может являться порцией другого кадра. WTRU может определять, в какой порции UL TRx происходит передача обратной информации DL HARQ из сконфигурированных и/или сообщенных параметров. Например, WTRU может определять, что обратная информация DL HARQ для одного или набора процессов DL HARQ должна быть передана в порции UL TRx каждого n-го кадра. Альтернативно WTRU может определять, что обратная информация DL HARQ, соответствующая DL TRx в кадре, передана в порции UL TRx следующего кадра. В другом примере обратная информация DL HARQ, соответствующая множеству принятых ТВ во множестве BTI или TTI, может быть объединена WTRU на первом этапе, а затем передана WTRU в порции UL TRx определенного кадра на eNB. В таком случае зависимость между порциями DL TRx, в которых с помощью WTRU были получены данные и для которых получена обратная информация DL HARQ, и порцией UL TRx, в которой объединенную обратную информацию с мульти-TTI HARQ передают на eNB, может быть настроена, может быть задана через временную зависимость или может быть определена при приеме сигнала управления DL или канала или его содержимого.
(3) Обратная информация UL HARQ, соответствующая TB, передаваемая WTRU в порции UL TRx кадра, может быть передана eNB в порции DL TRx следующего кадра.
(4) WTRU может определять, какая порция DL TRx и/или кадр могут содержать обратную информацию UL HARQ, соответствующую TB, переданную WTRU в порции UL TRx из настроенных и/или сообщенных параметров, или WTRU может определять, что обратная информация UL HARQ соответствующая UL TRx в кадре, передана в порции DL TRх кадра. В другом примере обратная информация UL HARQ, соответствующая множеству принятых ТВ во множестве BTI или TTI, может быть объединена eNB на первом этапе, а затем передана на WTRU в порции DL TRx определенного кадра посредством eNB. В таком случае взаимосвязь между порциями UL TRx, в которых с помощью eNB были получены данные и для которых получена обратная информация UL HARQ, и порцией DL TRx, в которой объединенную обратную информацию с мульти-TTI HARQ передают на WTRU, может быть настроена, задана через временную зависимость или определена для WTRU при передаче сигнала управления DL или канала или его содержимого.
(5) WTRU может определять, какая порция DL TRx может содержать обратную информацию UL HARQ, соответствующую предшествующим UL TB, при определении сигнальной последовательности и/или сигнала управления. Например, сигнальная последовательность может указывать на то, что обратная информация HARQ, несущая сигнал/канал, присутствует в порции DL TRx кадра, или сигнальная последовательность может соответствовать DCI или эквивалентному сигналу управления, указывающему на наличие и/или идентифицированных получателей информации обратной связи HARQ. Следует отметить, что сигнальная последовательность или сигнал управления, оповещающий о наличии обратной информации HARQ, может отличаться от сигнальной последовательности или сигнала управления, содержащего обратную информацию HARQ. Аналогичным образом, идентификаторы наличия, приема или обработки информации обратной связи HARQ могут быть декодированы из одного или из комбинации таких первого и второго сигналов.
(6) Обратная информация HARQ, соответствующая порции DL TRx или порции UL TRx, может быть передана с использованием несущей, не относящейся к 5gFLEX. Например, обратная информация DL HARQ, соответствующая каналу данных DL, принятая WTRU в порции DL TRx, может быть передана на eNB с помощью канала UL 3G HSPA или 4G LTE. На первом этапе WTRU может принять один или более TB по каналу данных DL с использованием DL 5gFLEX. На втором этапе WTRU может определять последовательность моментов передачи и полезных данных для канала управления 3G HSPA UL или 4G UL LTE для передачи одного или более битов обратной информации DL HARQ на eNB с использованием 4G LTE UL. В одном примере физический восходящий служебный канал управления (PUCCH) 4G LTE UL может использоваться с интервалом TTI, равным 1 миллисекунде (мс), для переноса N = 10 A/N бит, соответствующих N = 10 принимаемым 5gFLEX DL каналам данных. Этот иллюстративный пример также может применяться к 4G LTE UL PUSCH, несущему обратную информацию HARQ для принятых DL-данных DL 5gFLEX, или он может применяться при реверсировании направлений UL и DL, т. е. когда WTRU передает данные UL 5gFLEX в одном или более кадрах в порции (-ях) UL TRx, а затем принимает обратную информацию HARQ по каналу DL 3G HSPA или 4G LTE.
Могут использоваться различные методики определения синхронизации различных типов передачи и/или синхронизации определенных периодов, в которые не происходит передача (т. е. паузы в передаче). Выражение «тип передачи» может использоваться для обозначения передачи или паузы в передаче, характеризуемой любой комбинацией из следующего: направление; задача, связанная с паузой в передаче; передают информацию управления или данные; включает ли информация управления конкретный тип управления; тип сигнала; тип физического канала; обслуживание, SOM, качество обслуживания (QoS) или задача, связанная с передачей; соответствует ли передача регламентированной передаче или нерегламентированной передаче; заданное выделение ресурсов в частотной области или заданная несущая; или свойство, связанное с передачей.
Направление может включать в себя передачу по нисходящей линии связи, восходящей линии связи, передачу посредством прямого соединения или прием посредством прямого соединения. Задача, связанная с паузой в передаче, может включать в себя коммутацию от DL к UL, интервал между подкадрами, выполнение измерения для отчета CSI или управления радиоресурсами, оценку состояния канала. Конкретный тип информации управления может включать в себя обратную информацию гибридного автоматического запроса на повторение передачи (HARQ), информацию о состоянии канала (CSI), запрос диспетчеризации (SR), выделение частоты, схему модуляции и кодирования (MCS), размер транспортного блока, информацию из матрицы предварительного кодирования и т.п. Тип сигнала может включать в себя тип опорного сигнала, такой как зондирующий опорный сигнал, опорный сигнал демодуляции, опорный сигнал CSI или специфичный для соты опорный сигнал; сигнал синхронизации; преамбулу, среднюю часть сообщения или заключительную часть сообщения. Тип физического канала может включать в себя совместно используемый канал, выделенный канал или канал управления. Обслуживание, SOM, качество обслуживания (QoS) или задача, связанная с передачей, могут включать в себя следующее: связана ли передача со связью со сверхмалой задержкой, сверхнадежной связью, мобильной широкополосной связью, связью между устройством и устройством, связью между любым абонентом и подвижным объектом, массовой межмашинной связью и т. п. Регламентированной передачей можно управлять по сети. Нерегламентированная передача может быть инициируемой WTRU. Свойство, связанное с передачей, может включать в себя порядок модуляции, схему кодирования, ранг, разнос поднесущих, длительность символа, скорость кодирования и т. д.
Передача данного типа может происходить в течение одного непрерывного периода или на протяжении множества (дискретных) периодов. Возможные значения длительности для определенных типов передачи (например, передачи данных) могут быть кратны BTI. В течение одного периода может быть разрешено или может быть не разрешено множество передач одного и того же или разных типов в зависимости от схемы дуплексирования и возможностей WTRU.
В различных вариантах осуществления гибкая синхронизация типа «DCI – передача» может поддерживаться за счет использования переменного смещения по времени (например, между DCI и временем передачи) и/или многокадровой диспетчеризации (например, DCI-диспетчеризации). WTRU может принимать DCI (например, DCI(t)), который применяется в начале периода времени. Такой период времени может представлять собой период t, причем t может быть по меньшей мере одним из t = n, n + 1, n + 2 и т. д. Альтернативно t может представлять смещение по времени (например, число символов, BTI и т. д.). Такая DCI(t) может включать в себя одно значение t в случае выделения (например, выделения ресурсов) одного периода (например, TTI) для передачи или множество значений в случае выделения, которое может быть доступно для множества периодов передачи (например, множества TTI). Такое множество периодов передачи может быть либо последовательным (например, одно или более значений t могут представлять собой диапазон, включающий в себя, возможно, одно значение t с указанием общего числа событий), либо не перекрывающимся во времени (например, одно событие на значение t). Например, WTRU может принимать DCI, которая указывает множество передач с использованием множества значений t, где каждое значение может соответствовать случаю передачи для разных процессов HARQ (многозадачная диспетчеризация), и/или с использованием единственного значения t с указанием общего числа случаев передачи для одного процесса HARQ (например, для операции группирования).
Кроме того, передачи могут быть упорядочены с непостоянной синхронизацией. Синхронизация для типа передачи может быть основана на последовательности, например, может определяться на основе последовательности типов передачи в кадре и на основе длительности, связанной с каждым типом передачи в последовательности. После этого может определяться время начала для данного типа передачи как сумма длительностей более ранних типов передачи в последовательности. Длительность для типа передачи может быть фиксированной или может динамически определяться по любому из описанных в настоящем документе способу.
Например, может быть сконфигурирована следующая последовательность типов передачи: 1) информация управления нисходящей линии связи, 2) данные нисходящей линии связи, 3) интервал коммутации, 4) данные восходящей линии связи и 5) информация управления восходящей линии связи. В конкретном кадре длительности передачи «информации управления нисходящей линии связи» и передачи «данных нисходящей линии связи» могут соответствовать 1 BTI и 5 BTI соответственно. В этом случае время начала передачи «данных восходящей линии связи» может быть определено как 6 BTI плюс длительность интервала коммутации после начала кадра.
Синхронизация может зависеть от типа передачи. Синхронизация для типа передачи может быть основана на ограничении, например, может зависеть от условий и/или приоритетов, связанных с типом передачи. Такие условия могут включать в себя, без ограничений, следующие примеры: набор разрешенных BTI для данного типа передачи, задержку или минимальную задержку между передачей и связанной с ней передачей (возможно, другого типа), связанный с типом передачи приоритет относительно других типов передачи в тех случаях, когда они не могут происходить одновременно, или максимальную длительность, связанную с каждым типом передачи.
Набор разрешенных BTI для данного типа передачи может включать в себя, например, случай, когда передача информации управления восходящей линии связи может быть разрешена, только начиная с n-го BTI после начала кадра.
Примеры задержки или минимальной задержки между передачей и связанной с ней передачей (возможно, разных типов) могут включать в себя случаи, когда передача HARQ-ACK, связанного с передачей данных по нисходящей линии связи, может происходить только через по меньшей мере 1 BTI после окончания передачи данных по нисходящей линии связи, с возможным добавлением длительности, соответствующей времени задержки ответного сигнала и/или интервалу коммутации. Альтернативно задержка или минимальная задержка между передачей и связанной с ней передачей может включать в себя случаи, где передача данных по восходящей линии связи может быть разрешена только через по меньшей мере 1 BTI после окончания управления по физическому каналу нисходящей линии связи, указывающего его параметры.
Связанный с типом передачи приоритет относительно других типов передачи в тех случаях, когда они не могут происходить одновременно, сам по себе может зависеть от времени. Такие приоритеты могут включать в себя, без ограничений, следующие примеры: когда передача определенных типов информации управления восходящей линии связи (например, HARQ-ACK) может иметь более высокий приоритет, чем другие типы (например, CSI); причем информация управления в восходящей линии связи может иметь более высокий приоритет, чем передача данных по восходящей линии связи или (в случае полудуплексного функционирования TDD или FDD) прием данных по нисходящей линии связи; при этом передача данных по восходящей линии связи (или информация управления в восходящей линии связи) может быть приоритетной согласно связанному SOM (например, передача, связанная с SOM со сверхмалой задержкой, может иметь более высокий приоритет, чем передача, связанная с SOM мобильной широкополосной связи); и при этом передача HARQ-ACK, связанного с первой передачей данных по нисходящей линии связи, может иметь более высокий приоритет, чем передача HARQ-ACK, связанного со второй передачей данных по нисходящей линии связи, если первая передача данных по нисходящей линии связи начата (или завершена) раньше, чем вторая передача данных по нисходящей линии связи, по меньшей мере в том случае, если передачи связаны с одним и тем же SOM.
Согласно вышеприведенным принципам передача данного типа может быть инициирована (или продолжена) в самом раннем BTI, для которого разрешена передача, если она удовлетворяет любому условию по задержке или минимальной задержке и/или если этот тип передачи с наивысшим приоритетом данных, которые необходимо передать. В некоторых случаях текущая передача может прерываться при BTI, не удовлетворяющем (-их) условию (-ям), и может возобновляться при BTI, удовлетворяющем (-их) условию (-ям). Альтернативно текущая передача может быть остановлена и отменена, если она была прервана.
В системе беспроводной связи, такой как система 5gFLEX, могут использоваться различные подходы для определения описанных в настоящем документе временных параметров и в комбинации с любым из описанных в настоящем документе вариантов осуществления. Например, в настоящем документе описаны различные подходы для получения по меньшей мере одного из следующих параметров, используемых для определения синхронизации, связанной с типом передачи, включая, без ограничений, следующие примеры: время начала, время окончания и/или длительность передачи (которую можно получить, например, на основе длительности связанного кадра/подкадра), при этом подразумевается, что любой из этих трех параметров можно получить на основе двух других (т. е. длительность = время окончания - время начала; при этом время начала и время окончания могут относиться к началу кадра или к другой точке отсчета времени); время начала, время окончания и/или длительность каждой непрерывной порции передачи и число порций в случаях, когда передача происходит дискретно; положение типа передачи в последовательности (если применимо); набор разрешенных BTI для типа передачи, если применимо (его еще также могут называть «структурой кадра»); набор BTI, к которому (-ым) применяют приоритет по типу передачи, если применимо; применимость в кадре синхронизации на основе ограничений или синхронизации на основе последовательности; максимальная длительность передачи; или время начала кадра. «Типы» или «структуры» кадра (или подкадра) могут быть определены для обозначения конкретных комбинаций значений (или их диапазона) для по меньшей мере одного из вышеуказанных параметров. Подразумевается, что, таким образом, решения также применимы к определению типов или структур кадра (или подкадра).
Следовательно, эти подходы могут также применяться для указания подмножества ресурсов в пределах BTI, связанных с типом передачи, когда один и тот же BTI используют для более чем одного типа передачи (например, на границе между двумя типами передачи). Например, первое подмножество частотных ресурсов в пределах BTI может быть связано с первым TTI или типом передачи, а второе подмножество частотных ресурсов в пределах BTI может быть связано со вторым TTI или типом передачи.
По меньшей мере один временной параметр может быть предварительно определен, сконфигурирован на более высоких уровнях или зависит от дуплексного режима или возможностей WTRU. Например, длительность сигнала преамбулы может быть предварительно определена равной одному BTI.
По меньшей мере один временной параметр может быть определен динамически на основе неявного или явного указания из информации управления нисходящей линии связи, принятой в начале кадра или в предыдущем кадре. Указание может включать в себя поле информации управления нисходящей линии связи; тип физического канала управления; пространство поиска и/или время, в течение которого происходит декодирование физического канала управления; или идентификатор, используемый для определения применимости физического канала управления. Ниже приведены не имеющие ограничительного характера примеры таких указаний.
Информация управления нисходящей линии связи может указывать на то, что первая передача данных по восходящей линии связи, связанных с первым SOM, начинается с указанного времени и происходит с первой указанной длительностью, за которой следует вторая передача данных по восходящей линии связи, связанных со вторым SOM, начинающаяся сразу после первой передачи и происходящая со второй указанной длительностью.
Информация управления нисходящей линии связи может указывать время начала передачи по восходящей линии связи, содержащей информацию HARQ-ACK, применимую к конкретной передаче по нисходящей линии связи (т. е. для данной несущей), и/или тип подкадра.
Тип успешно декодированного физического канала управления нисходящей линии связи и/или формат DCI может определять временные параметры передачи (передач) по нисходящей линии связи или по восходящей линии связи, указываемые посредством сигнализации управления. Например, успешное декодирование первого типа физического канала управления, применяемого для цели указания одной или более передач, связанных с первым конкретным SOM (например, SOM, подходящим для связи со сверхмалой задержкой), может косвенно указывать первый набор временных параметров, связанных с одной или более передачами (и/или первым типом подкадра), а декодирование второго типа физического канала управления, применяемого для указания одной или более передач, связанных со вторым конкретным SOM (например, SOM, подходящим для мобильной широкополосной связи), может косвенно указывать второй набор временных параметров (и/или второй тип подкадра).
Информация управления нисходящей линии связи может указывать длительность опорного сигнала, используемого в нисходящей линии связи или восходящей линии связи, например, в качестве опорного сигнала демодуляции или зондирующего опорного сигнала.
Информация управления нисходящей линии связи может указывать ряд TTI и/или набор или ряд процессов HARQ для TTI, включаемых в пределах определенного периода времени, такого как подкадр. После этого время начала и время окончания каждого TTI может быть косвенно получено на основе числа доступных символов (или BTI) в течение этого периода времени, возможно, за исключением любого символа или BTI, используемого для передачи информации управления нисходящей линии связи (такой как область управления в случае передачи на основе LTE). Например, время начала и время окончания каждого TTI может быть установлено таким образом, чтобы все TTI в подкадре имели одинаковую длительность, за исключением, возможно, последней. Кроме того, время начала и окончания любого TTI может быть ограничено таким образом, чтобы TTI полностью содержался в подблоке периода времени, таком как интервал подкадра.
Например, информация управления нисходящей линии связи может указывать, что в подкадре передают 2 TTI или что в подкадре передают 2 TTI с процессами HARQ 2 и 3. В том случае, если область управления занимает 2 символа, а подкадр включает в себя 14 символов, это может косвенно указывать на то, что первый TTI начинается с третьего символа и заканчивается на восьмом символе, а второй TTI начинается с девятого символа и заканчивается на четырнадцатом символе. Альтернативно, в том случае, когда каждый TTI ограничен пределами одного интервала, это может косвенно указывать на то, что первый TTI начинается с третьего символа и заканчивается на седьмом символе, а второй TTI начинается с восьмого символа и заканчивается на четырнадцатом символе.
Информация управления нисходящей линии связи может указывать размер транспортного блока или максимальный размер транспортного блока для одного или более TTI, которые включаются в пределах определенного периода времени, такого как подкадр. После этого может быть косвенно получено время начала и время окончания каждого TTI от схемы модуляции и кодирования (MCS) и выделение блока ресурса (RB), для которого размер транспортного блока не будет превышать указанный максимальный размер транспортного блока. Например, для указанной MCS выделение RB и максимального размера транспортного блока WTRU может определять, что максимальное число символов (или BTI) равно 3. WTRU может определять время начала и окончания каждого TTI на основе этого максимального значения согласно принципам, аналогичным описанным в настоящем документе, например, в предыдущем примере.
Временные параметры для типа передачи, используемые для обеспечения информации обратной связи HARQ, могут быть косвенно получены на основе длительности TTI для соответствующей передачи или на основе множества TTI, соответствующих передачам в пределах определенного периода времени. Например, число передач, несущих обратную информацию HARQ, в пределах определенного периода времени (например, подкадра), может соответствовать числу TTI в подкадре для соответствующих передач. Например, если транспортные блоки передают в двух TTI в пределах подкадра (например, по физическому каналу для передачи информации нисходящей линии связи с разделением пользователей (PDSCH) в случае передачи на основе LTE), в пределах подкадра могут происходить две передачи, несущие обратную информацию HARQ для этих транспортных блоков.
Один или более временных параметров могут быть косвенно определены на основе свойства, связанного с типом передачи. Например, информация о синхронизации (например, по меньшей мере длительность) опорного сигнала демодуляции может зависеть от схемы модуляции и кодирования, а также ранга соответствующих данных или передачи управления.
Один или более временных параметров могут быть косвенно определены на основе свойства сигнала, полученного в начале кадра или в предыдущем кадре. Например, последовательность типов передачи может быть функцией последовательности (такой как корневая последовательность Задова — Чу или циклический сдвиг такой последовательности), используемой для генерации сигнала синхронизации или опорного сигнала, полученного в начале кадра или в предыдущем кадре.
Один или более временных параметров могут быть определены на основе полезных данных, связанных с типом передачи. Например, длительность передачи, несущей HARQ-ACK, может зависеть от числа бит информации HARQ-ACK для передачи. В другом примере длительность передачи, несущей информацию управления нисходящей линии связи, может зависеть от числа бит, используемых для динамического указания передачи данных по нисходящей линии связи или восходящей линии связи.
Один или более временных параметров могут быть определены на основе косвенного или явного указания в самой передаче. Такие указания могут включать в себя, например, свойство опорного сигнала, сопоставленного с ресурсами в пределах данного BTI, что может указывать на то, заканчивается ли передача в конце BTI (или группы BTI) или продолжается в течение по меньшей мере одного дополнительного BTI (или группы BTI); свойство опорного сигнала, сопоставленного с ресурсами в пределах данного BTI (или группы BTI), что может указывать на то, что начинается (или заканчивается) новая передача в начале (или в конце) этого BTI (или группы BTI); свойство опорного сигнала, сопоставленное с ресурсами в пределах данного BTI, что может указывать на длительность или остаточную длительность передачи; или информацию управления нисходящей линии связи, мультиплексированную с данными в одном и том же физическом канале.
В одном примере информации управления нисходящей линии связи, мультиплексированной с данными в одном и том же физическом канале, указание может быть объединено с каждым блоком кода (например, в начале или в конце блока кода) передачи. Указание может быть совместно закодировано с данными в каждом блоке кода или отдельно от них. Указание также может использоваться для маскировки циклической проверки четности с избыточностью, добавляемой в конце каждого блока кода. WTRU может определять, что блок кода был успешно декодирован, и определять, продолжается ли передача в течение длительности, соответствующей по меньшей мере одному последующему блоку кода, путем проверки значения из указания или путем определения значения из указания, использование которого приводит к успешной CRC после маскирования. WTRU может прерывать декодирование передачи в том случае, если блок кода не может быть успешно декодирован, или в том случае, если блок кода декодирован успешно, но согласно указанию передача завершена.
Один или более временных параметров могут быть определены на основе SOM, связанного с передачей. Например, длительность передачи, связанной с первым SOM (например, подходящая для сверхмалой задержки), может быть равна 1 BTI, тогда как длительность передачи, связанной со вторым SOM (например, подходящая для мобильной широкополосной связи), может быть равна 2 BTI.
WTRU, работающий в системе беспроводной связи, такой как система 5gFLEX, может быть выполнен с возможностью определения кадровой синхронизации и/или номера кадра в системе в соответствии с другим вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. Получение кадровой синхронизации может использоваться не только для приема сигналов от связанного узла (eNB или другого WTRU), но также и для передачи (например, чтобы другой узел мог правильно принять переданные данные). В контексте описанной в настоящем документе структуры с переменным кадром и в связи с необходимостью свести к минимуму число общих каналов управления может быть затруднительно или нежелательно непрерывно обеспечивать периодические синхронизирующие сигналы для получения кадровой синхронизации.
Получение кадровой синхронизации и номера кадра в системе дополнительно описано ниже в контексте WTRU, который подключен к eNB или находится в процессе подключения к eNB. Однако эти методики также могут быть применимы к любым типам узлов (WTRU, eNB, ретранслятор, точка доступа и т. д.). В дальнейшем термин «источник синхронизации» может использоваться для описания узла, который используют как опорный для определения синхронизации. Этот источник синхронизации может представлять собой, например, eNB, WTRU, точку доступа, базовую станцию, специальное устройство, придорожный модуль и т. д.
WTRU или узел, получающий кадровую синхронизацию, может быть выполнен с возможностью контроля одного или более общих опорных сигналов от одного или более источников синхронизации.
Опорный сигнал может включать в себя специальную преамбулу, передаваемую источником синхронизации (например, eNB). WTRU может определять, что преамбула может использоваться для определения кадровой синхронизации на основе характеристик сигнала преамбулы. Для удобства такая специальная преамбула в настоящем документе может называться преамбулой синхронизации.
WTRU может быть выполнен с возможностью приема одного или более сигналов преамбулы. При приеме преамбулы WTRU может определять, является ли принятая преамбула преамбулой синхронизации (например, на основе характеристик преамбулы, например, в случае последовательности Задова — Чу, корневая, циклический префикс или их комбинация). WTRU может быть выполнен с возможностью, после определения преамбулы синхронизации, настройки своей внутренней синхронизации в соответствии с принятыми сигналами синхронизации. WTRU может дополнительно использовать преамбулу для анализа канала, например, чтобы способствовать обнаружению сигнала получаемой информации управления/информации в виде данных, содержащейся в подкадре.
WTRU может быть выполнен с возможностью приема специальных сообщений о синхронизации. Эти сообщения могут нести один или более сигналов синхронизации, абсолютную привязку по времени, номер кадра в системе или смещение по времени.
Сигнал или код синхронизации могут включать в себя специальную последовательность бит (например, Задова — Чу, код Голда и т. д.), которая может быть мультиплексирована с полезными данными и может использоваться в качестве опорного сигнала синхронизации.
Абсолютная привязка по времени (например, универсальное скоординированное время (UTC)) или округленная абсолютная привязка по времени может включать в себя, например, сообщение о синхронизации, которое может содержать полное или частичное абсолютное время (системное время). В одном конкретном примере сообщение может включать в себя время UTC. Затем WTRU может получать абсолютное время, например, относительно времени, в которое он принял сообщение (а не время его декодирования).
Номер кадра в системе может быть включен в сообщение о синхронизации, которое может нести номер кадра в системе (полностью или частично).
В сообщение может быть включено смещение по времени, которое может нести смещение по времени, которое WTRU может применять к своим внутренним часам. Это может быть оправдано, например, для смещения внутренних часов WTRU таким образом, чтобы некоторые зависимые от времени процедуры в WTRU могли использовать значение времени, отличное от значения соседних WTRU (что позволяет применять методику подавления помех).
WTRU может определять номер кадра в системе на основе абсолютного времени. Например, этого можно достичь путем отбрасывания наиболее значимых бит счетчика абсолютного времени. В таких случаях, возможно, не потребуется непосредственная передача номера кадра в системе. Этот подход может быть предпочтительным по многим аспектам, включая безопасность более высокого уровня, которые теперь могут быть основаны на абсолютном и общем известном значении счета.
Сообщение о синхронизации может быть общим или выделенным. Общие сообщения о синхронизации могут передаваться или могут быть запланированы с использованием широковещательного канала.
Сообщение о синхронизации может периодически передаваться узлом (например, WTRU или eNB). Для снижения потребления ресурсов сообщение о синхронизации может передаваться с очень малым рабочим циклом. Например, узел, передающий сообщение о синхронизации, может быть выполнен с возможностью передачи сообщения о синхронизации в наборе конкретных (например, предварительно сконфигурированных) моментов абсолютного времени (например, выраженных во времени UTC). WTRU (или синхронизирующее устройство) может быть выполнено с возможностью настройки окна прослушивания, которое является достаточно длинным для захвата сообщения о синхронизации. В одном примере WTRU определяет свое окно прослушивания на основе количества времени, прошедшего с момента получения им значения абсолютного времени, и на основе предполагаемой нестабильности во времени его внутренних аппаратных часов.
WTRU может определять регламент для сообщения о синхронизации с помощью соседних узлов/сот. Это может использоваться, например, в случае, если не настроен предварительно сконфигурированный момент времени для передачи сообщения о синхронизации или если он недоступен (например, при роуминге в другой сети, определяемом наземной сетью мобильной связи общего пользования (PLMN) или географическим положением). В частности, WTRU может принимать информацию о регламенте сообщений о синхронизации одного или более источников синхронизации от узла, к которому он подключен. В одном примере WTRU может запрашивать/получать информацию источника синхронизации из сети (например, посредством узла, к которому он подключен, или с применением другой RAT (например, LTE, HSPA и т. д.)).
Регламент сообщений о синхронизации может быть выражен относительно абсолютного времени (например, времени UTC) или относительно времени системы/узла, к которому подключен WTRU (например, другая RAT или т. д.).
WTRU может быть выполнен с возможностью получения кадровой синхронизации посредством запроса синхронизации от узла источника синхронизации. Данный подход может быть оправдан, например, в том случае, если узел источника синхронизации (например, eNB) представляет собой маломощную соту или узел, который неактивен или выключен.
WTRU может быть выполнен с возможностью передачи одного или более сообщений или сигналов с запросом синхронизации в течение заданного временного окна. Предварительно сконфигурированное временное окно может быть выражено относительно времени UTC, которое WTRU мог получить в предшествующий момент времени. Например, WTRU мог получить кадровую синхронизацию и может продолжать поддерживать синхронизацию посредством своих внутренних часов. Из-за дрейфа часов можно ожидать, что WTRU постепенно станет несогласованным с временем UTC или системным временем, и, следовательно, если узел источника синхронизации имеет достаточно широкое окно прослушивания, сообщение с запросом синхронизации может быть принято соответствующим образом.
WTRU может быть выполнен с возможностью периодической передачи сигнала с запросом синхронизации и после приема этого сигнала синхронизации может присылать ответное сообщение о синхронизации. Использование этого подхода может быть оправдано с точки зрения энергоэффективности операций.
WTRU может быть выполнен с возможностью периодической отправки сообщения с запросом о синхронизации на узел синхронизации, если он не получит сообщение о синхронизации в течение предварительно настроенного количества времени. Это количество времени может зависеть, например, от возможностей WTRU, и может варьироваться от одного WTRU к другому.
Фиг. 8 представляет собой блок-схему примера процесса определения кадровой синхронизации и/или номера 800 кадра в системе в соответствии с этим вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. WTRU может сначала принимать или получать время UTC/системное время и/или сигнал кадровой синхронизации посредством конфигурации, этап 801 (например, посредством проводного (например, USB) или беспроводного (например, GPS) подключения к внешнему источнику). WTRU может принимать сообщения о синхронизации и повторно получать и поддерживать свое время UTC/системное время, этап 802, и/или сигнал кадровой синхронизации в соответствии с регламентом сообщений о предварительно сконфигурированной синхронизации в сети. WTRU может определять свою кадровую синхронизацию на основе принятого значения в сообщении о синхронизации. WTRU может временно отключать свой приемопередатчик, приемник или передатчик и/или терять свое покрытие сети, этап 803. WTRU может поддерживать свои внутренние часы UTC и/или часы кадровой синхронизации, этап 802. Затем WTRU может попытаться повторно получить кадровую синхронизацию при включении своего приемопередатчика, приемника или передатчика или при попытке получения синхронизации на основе предварительно настроенного временного окна для передачи сообщения о синхронизации. Если WTRU не принимает сообщение 804 о синхронизации, WTRU может быть выполнен с возможностью передачи сигнала 805 о синхронизации и обеспечения контроля сообщения о синхронизации из нисходящей линии связи. Такой контроль может быть непрерывным, как показано на фиг. 8.
Фиг. 9 представляет собой блок-схему примера процесса 900 управления передачей и диспетчеризации в соответствии с одним вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. WTRU может принимать DCI по каналу управления, такому как PDCCH, этап 901. Полученная DCI, этап 901, может включать в себя характеристики DCI, включая, без ограничений, следующие: связанный канал управления, пространство поиска, RNTI, используемый для декодирования DCI, сигнал демодуляции или т. п. Такая DCI, этап 901, может представлять собой DCI, которая выделяет ресурсы физического уровня для рассматриваемой передачи. Альтернативно она может представлять собой DCI, предназначенную для диспетчеризации параметров синхронизации и/или кадрирования, связанных с применимыми ресурсами физического уровня (например, SOM).
После этого WTRU может определять относящийся к передаче разнос ∆f поднесущих на основе одной или более идентифицированных ранее характеристик DCI, этап 902. Для асинхронной работы разнос поднесущих может быть основан на свойстве преамбулы, связанной с началом кадра. Например, WTRU может определять относящийся к передаче разнос поднесущих на основе указания, принятого в DCI. В другом примере разнос поднесущих может быть указан для передачи по восходящей линии связи. После этого WTRU может определять связанный с передачей BTI на основе связанного разноса поднесущих.
Затем WTRU может определять общую относящуюся к передаче длительность передачи кадра, например, TTIDL(n) (например, для FDD) или TTI(n) (например, для TDD), этап 903, на основе одной или более характеристик идентифицированного ранее DCI. Длительность TTI может быть выражена в виде BTI, символе (-ах) или т. п. Для асинхронной работы длительность передачи кадра может быть основана на свойстве преамбулы, связанной с началом кадра. Для FDD длительность TTI может быть равна длительности передачи по нисходящей линии связи DL_TRх, связанной с кадром n, когда один ТВ передают за TTI (например, после того, как сначала будет исключена длительность DCI, если применимо); в противном случае длительность TTI может дополнительно использоваться для определения длительности множества DL_TRx для кадра n, например посредством деления длины TTI на число применимых передач в кадре или посредством комбинирования с учетом длительностей других порций DL_TRx для кадра или аналогичных. Например, если известна общая длительность кадра (или всей порции DL) и если известна длительность всех TTI DL в кадре или порции DL, кроме одной, может быть определена длительность оставшегося TTI DL. Для TDD длительность TTI может быть равна длительности передачи DL_TRx по нисходящей линии связи, интервала коммутации (SWG) и передачи UL_TRx по восходящей линии связи, связанных с кадром n, если за UL- или DL-порцию кадровой конфигурации передают не более одного ТВ; в противном случае длительность TTI можно определить способом, аналогичным способу для случая с FDD. Может поддерживаться множество порций DL_TRx и/или порций UL_TRx. Например, WTRU может определять такую относящуюся к передаче длительность на основе указания, принятого в DCI.
Затем WTRU может определять смещение времени начала передачи по восходящей линии связи (например, toffset), этап 904, на основе одной или более характеристик идентифицированной выше DCI. Для асинхронной работы время начала передачи может быть основано на свойстве преамбулы, связанной с началом кадра. Для FDD, если поддерживается множество порций UL_TRx, WTRU может определять одно смещение, применимое к первой порции для восходящей линии связи, если все порции для восходящей линии связи находятся в последовательных символах для рассматриваемого кадра, или, в противном случае, может определять одно смещение для каждой порции. Например, WTRU может определять одно или более смещений времени начала передачи, относящихся к передаче, на основе указания, принятого в DCI.
Затем WTRU может определять относящуюся к передаче длительность ТВ нисходящей линии связи, например, tDL(n), на основе одной или более идентифицированных ранее характеристик DCI, этап 905. Для асинхронной работы длительность ТВ нисходящей линии связи может быть основана на свойстве преамбулы, связанной с началом кадра. Если поддерживается множество порций DL_TRx, WTRU может определять одно значение tDL(n) для всех порций, если они имеют одинаковую длительность в пределах кадра (например, для операций, подобных группированию), или, в противном случае, одно значение для каждой порции. Например, WTRU может определять одну или более длительностей ТВ нисходящей линии связи, относящихся к передаче, на основе указания, принятого в DCI.
Затем WTRU может определять относящуюся к передаче длительность ТВ восходящей линии связи, например, tUL(n), на основе одной или более идентифицированных ранее характеристик DCI, этап 906. Для асинхронной работы длительность ТВ восходящей линии связи может быть основана на свойстве преамбулы, связанной с началом кадра. Если поддерживается множество порций UL_TRx, WTRU может определять одно значение tUL(n) для всех порций, если они имеют одинаковую длительность в пределах кадра (например, для операций, подобных группированию), или, в противном случае, одно значение для каждой порции. Например, WTRU может определять одну или более длительностей ТВ восходящей линии связи, относящихся к передаче, на основе указания, принятого в DCI.
Затем WTRU может определять время до начала следующего кадра (например, время между кадрами, такое как ISS, применимое с конца связанного кадра) на основе одной или более идентифицированных выше характеристик DCI, этап 907. Для асинхронной работы время до начала следующего кадра может быть основано на свойстве преамбулы, связанной с началом кадра. Например, WTRU может определять время до начала следующего кадра, такое как смещение от начала текущего кадра. Такое смещение может использоваться WTRU для определения того, может ли он выполнять декодирование сигнализации управления до начала следующего кадра (например, применить DRX к рассматриваемому каналу управления). Например, WTRU может определять такое время до начала следующего кадра на основе указания, принятого в DCI.
Затем WTRU может определять применимую к текущему кадру длительность интервала коммутации (SWG) (и/или периода молчания/паузы) на основе одной или более идентифицированных ранее характеристик DCI, этап 908. Для асинхронной работы длительность интервала коммутации может быть основана на свойстве преамбулы, связанной с началом кадра. Например, WTRU может определять такой интервал и/или период на основе указания, принятого в DCI.
Затем WTRU может определять временную зависимость между данными DL и UCI, применимую к принятой порции DL TRx, этап 909, для параметризации HARQ на основе одной или более идентифицированных ранее характеристик DCI. WTRU может определять, в какой порции UL TRx, и/или в каком кадре, и/или в каких параметрах передачи он может передавать обратную информацию DL HARQ, соответствующую принятым данным DL, на eNB. На основе принятой параметризации HARQ WTRU может определять, возможно ли объединить обратную информацию HARQ одного или множества принимаемых каналов данных DL для генерации информации управления UL. WTRU может определять временную зависимость между передачей данных UL в одной или более порциях UL TRx и приемом информации управления DL, объединением информации управления DL, соответствующей множеству принятых каналов данных UL и используемым параметрам кодирования.
Фиг. 10 представляет собой блок-схему примера процесса 1000 согласования линии связи и диспетчеризации в соответствии с одним вариантом осуществления, который может использоваться в комбинации с любым из описанных в настоящем документе вариантов осуществления. WTRU может определять параметры для передач по нисходящей линии связи и восходящей линии связи с целью их использования при согласовании канала и в других аспектах управления передачей. Согласование линии связи и диспетчеризация могут быть основаны на периоде времени. Например, как показано на фиг. 10, WTRU может принимать, этап 1001, по меньшей мере один параметр передачи для передачи по восходящей или нисходящей линии связи, который может быть функцией явных или косвенных указаний, принятых от более чем одного экземпляра сигнализации управления нисходящей линии связи.
Более чем один принятый экземпляр может, например, включать в себя первый экземпляр и/или второй экземпляр, например, первую DCI и вторую DCI соответственно, этап 1001. Первый экземпляр (например, DCI) может указывать по меньшей мере один параметр, применимый к набору передач, происходящих в течение последующего периода времени. Например, такой период времени может иметь длительность, равную подкадру 1 мс, которая может, например, соответствовать одному подкадру LTE (1 мс). Такой первый экземпляр может называться «медленной» сигнализацией управления нисходящей линии связи. Второй экземпляр (например, вторая DCI) может указывать дополнительные параметры, применимые к конкретной передаче из набора в пределах периода времени. Такой второй экземпляр может называться «быстрой» сигнализацией управления нисходящей линии связи. Сигнализация управления нисходящей линии связи, применимая к каждому экземпляру, может быть декодирована из физических каналов управления нисходящей линии связи различных типов, возможно, в разных пространствах поиска и с использованием разных идентификаторов.
Как показано на фиг. 10, WTRU может декодировать, этап 1002, второй экземпляр (например, вторую DCI) сигнализации управления нисходящей линии связи на основе явной информации, полученной из первого экземпляра (например, первой DCI) сигнализации управления нисходящей линии связи, и/или на основе косвенной информации, полученной на основе свойства передачи, содержащей первый экземпляр сигнализации управления нисходящей линии связи. Например, ресурс или набор возможных ресурсов для второго экземпляра сигнализации управления нисходящей линии связи может быть определен на основе ресурса, используемого для первого экземпляра сигнализации управления нисходящей линии связи, и/или по меньшей мере одного явного указания, полученного из первого экземпляра сигнализации управления нисходящей линии связи. Ресурс может включать в себя по меньшей мере одно из набора блоков ресурсов, обслуживающей соты (или оборудования связи), набора временных символов, набора антенных портов, особенностей скремблирования для опорного сигнала или элемента канала управления (CCE), такого как первый CCE, связанный с первым экземпляром сигнализации управления нисходящей линии связи. Альтернативно сигнализация управления нисходящей линии связи может быть мультиплексирована с данными в одном и том же физическом канале в случае передачи по нисходящей линии связи. Например, второй экземпляр (например, вторая DCI) сигнализации управления нисходящей линии связи может быть закодирована отдельно от данных нисходящей линии связи, а модулированные символы на основе сигнализации управления нисходящей линии связи могут отображаться в конкретных временных или частотных ресурсах, например, в первом временном символе передачи.
WTRU может выполнять дополнительные примеры основанных на периоде времени согласования линии связи и диспетчеризации. Например, как показано на фиг. 10, WTRU может определять MCS 1003, применимую к передаче по нисходящей линии связи или восходящей линии связи. WTRU может определять MCS 1003 несколькими способами. Например, WTRU может определять MCS 1003 посредством определения суммы первого значения MCS, принятого в первом экземпляре (например, первой DCI), и второго значения MCS, принятого во втором экземпляре (например, второй DCI). Число возможных значений может быть выше для первого экземпляра (например, первой DCI), чем для второго экземпляра (например, второй DCI), что позволяет снизить потребление ресурсов на сигнализацию управления применительно к конкретной передаче. Например, первый экземпляр (например, первая DCI) может указывать значение в диапазоне от 0 до 31, а второй экземпляр (например, вторая DCI) может указывать значение настройки в диапазоне от -2 до 1. Альтернативно связанный с MCS параметр, обеспеченный во втором экземпляре (например, вторая DCI), может отсутствовать, в результате чего одно и то же значение MCS применяется ко всем передачам в пределах периода. WTRU может определять MCS 1003, применимую к передаче по нисходящей линии связи, путем выполнения настройки MCS после приема каждого блока кода (или каждого транспортного блока) на основе указания. Указание может быть объединено с каждым блоком кода (например, в начале или в конце блока кода) передачи или с каждым транспортным блоком. Указание может быть совместно закодировано с данными в каждом блоке кода или закодировано отдельно от данных в каждом блоке кода. Указание также может использоваться для маскировки CRC, добавляемой в конце каждого блока кода (или транспортного блока). WTRU может определять настройку для уровня MCS, применяемую к последующему блоку кода (или транспортному блоку) на основе значения указания. Настройка может относиться к значению MCS, принятому в первом экземпляре информации управления нисходящей линии связи, или относиться к последнему скорректированному значению MCS.
Как показано на фиг. 10, WTRU может определять выделение в частотной области 1004 (например, набор блоков ресурса) посредством комбинирования указания, принятого в первом экземпляре (например, первой DCI), с указанием, принятым во втором экземпляре (например, второй DCI). Например, указание первого экземпляра (например, первой DCI) может состоять из полного набора блоков ресурса, который может использоваться посредством применимых передач в периоде. Такое указание может иметь высокую степень гранулярности (например, 20 бит). Указание второго экземпляра (например, второй DCI) может определять подмножество выделения, указанное первым экземпляром (например, первой DCI), с использованием небольшого числа бит для конкретной передачи. Например, первое значение может указывать на то, что все блоки ресурсов используются для конкретной передачи, второе значение может указывать на то, что используется лишь первая половина выделения, третье значение может указывать на то, что используется лишь вторая половина выделения, и т. д. Кроме того, возможно, что во втором экземпляре отсутствуют какие-либо указания, так что одно и то же выделение используется для всех передач в рамках периода.
Как показано на фиг. 10, WTRU может определять выделение ресурса во временной области (например, набор временных символов и/или синхронизацию) передачи, этап 1005, посредством комбинирования явного указания, принятого в первом экземпляре (например, первой DCI), с косвенным указанием из успешно декодированного второго экземпляра (например, второй DCI). Первый экземпляр может относиться к множеству наборов одного или более временных символов (или указывать их), в которых может передаваться второй экземпляр сигнализации управления и/или данные нисходящей линии связи (в случае передачи по нисходящей линии связи). Например, первый экземпляр (например, первая DCI) может указывать первый набор временных символов (например, от второго до седьмого) и второй набор временных символов (например, от восьмого до четырнадцатого) подкадра LTE. WTRU может попытаться декодировать второй экземпляр (например, вторую DCI) сигнализации управления нисходящей линии связи в конкретных ресурсах (или пространстве поиска) в пределах каждого набора временных символов. WTRU может определять, что второй экземпляр (например, вторая DCI) сигнализации управления нисходящей линии связи успешно декодирован на основе циклической проверки четности с избыточностью (CRC), присоединенной к полезным данным. Затем WTRU может определять синхронизацию передачи по нисходящей линии связи или восходящей линии связи на основе набора временных символов, в течение которых был успешно декодирован второй экземпляр (например, вторая DCI) сигнализации нисходящей линии связи. Например, в том случае, если второй экземпляр (например, вторая DCI) был успешно декодирован на восьмом временном символе, WTRU может определять, что передача по нисходящей линии связи выделена во втором наборе временных символов. В другом примере WTRU может быть сконфигурирован с использованием применимых наборов временных символов для заданного кадра, например, подкадра LTE. Первый экземпляр (например, первая DCI) может указывать, для какого набора, как предполагается, WTRU будет выполнять дальнейшую обработку DCI способом, аналогичным описанному выше.
Как показано на фиг. 10, WTRU может определять дальнейшее состояние процесса HARQ как функцию такого указания выше в первом экземпляре (например, первой DCI) сигнализации управления нисходящей линии связи, этап 1006. Каждый набор символов может быть дополнительно связан с пространством идентификации процесса HARQ, например, когда для каждого такого пространства и/или набора символов может быть активен один процесс HARQ на кадр, например, подкадр LTE. Альтернативно каждый набор символов может быть дополнительно связан с идентификатором процесса HARQ, например, таким как идентификатор, который увеличивается для каждого набора символов, начиная с первого символа кадра и далее. Иными словами, идентификатор процесса HARQ может последовательно увеличиваться с течением времени для каждого набора символов. Например, WTRU может принимать обратную информацию HARQ для одной или более предыдущих передач по восходящей линии связи, например, с использованием физического канала для передачи HARQ (PHICH) в LTE. Такая обратная информация может быть принята в соответствии с замедленной синхронизацией информации управления, например, один раз на кадр, например, 1 мс подкадр LTE. WTRU может использовать такую обратную информацию для определения того, может ли WTRU выполнять автономные повторные передачи для применимых процессов HARQ, например, если WTRU выполнен с возможностью выполнения таких повторных передач. Например, в LTE WTRU может выполнять автономные повторные передачи в соответствии с синхронной обработкой HARQ в восходящей линии связи. Иными словами, WTRU может интерпретировать такую обратную информацию как указание на включение или выключение автономных передач WTRU для рассматриваемых процессов HARQ. Такое состояние HARQ может быть дополнительно определено как функция указания в первом экземпляре. Например, если включены автономные повторные передачи WTRU, такое определение может соответствовать команде о приостановке одного или более из рассматриваемых процессов HARQ и/или запрете выполнения любых автономных повторных передач WTRU, например, если WTRU определяет, что он предположительно не будет выполнять дальнейшую обработку для связанного набора символов. Альтернативно WTRU может интерпретировать PHICH в соответствии с поведением прежнего WTRU и выполнять логическую функцию (например, логическое «И») с таким заданным указанием в первом экземпляре сигнализации управления нисходящей линии связи. Например, такая сигнализация управления может содержать один бит для каждого набора символов, дополнительно указывающий связанную с HARQ обратную информацию для каждого процесса HARQ в кадре, например, в подкадре LTE, в дополнение к указанию того, будет ли (адаптивная повторная передача, если применимо) или не будет (неадаптивная повторная передача, если применимо) WTRU предположительно осуществлять дальнейшую обработку информации управления нисходящей линии связи способом, аналогичным описанному выше.
Как показано на фиг. 10, WTRU может определять, что для этого WTRU, этап 1007, запланирована передача по нисходящей линии связи или восходящей линии связи, если определенный набор параметров идентификации указан в (или его используют для декодирования) первом и втором экземплярах (например, первой и второй DCI) сигнализации управления нисходящей линии связи. Тот же параметр (например, временный идентификатор радиосети (C-RNTI)) может использоваться для маскирования CRC, добавленной к полезным данным первого и второго экземпляров (например, первой и второй DCI).
Первый и второй параметры идентификации первого и второго экземпляров (например, первой и второй DCI) соответственно могут быть получены как функции одного и того же C-RNTI и могут использоваться для маскирования CRC, добавленной к полезным данным первого и второго экземпляров. Например, первый параметр идентификации может соответствовать значению RNTI, присвоенному или определенному для работы с двумя экземплярами сигнализации управления нисходящей линии связи, а второй параметр идентификации может соответствовать C-RNTI или его функции. В этом примере первый экземпляр сигнализации управления нисходящей линии связи (например, первая DCI) может также указывать набор укороченных идентификаторов, соответствующих WTRU, которые могут быть запланированы в периоде. Укороченный идентификатор может представлять собой функцию, или случайные данные, или иные данные, основанные на C-RNTI, или может быть назначен на более высоком уровне. WTRU может определять, что передача по нисходящей линии связи или восходящей линии связи регламентирована, если она была указана с помощью ее укороченного идентификатора из первого экземпляра (например, первой DCI), который декодируют с использованием первого идентификатора, и успешно декодирован второй экземпляр (например, вторая DCI) с использованием его второго идентификатора.
В другом примере второй параметр идентификации может быть получен с использованием явного указания из первого экземпляра (например, первой DCI) сигнализации управления нисходящей линии связи. Второй параметр идентификации может использоваться для декодирования второго экземпляра (например, второй DCI) сигнализации управления нисходящей линии связи. Например, он может быть включен в полезные данные или он может использоваться для маскирования циклической проверки четности с избыточностью (CRC), добавленной к полезным данным.
В другом примере первый экземпляр (например, первая DCI) сигнализации управления нисходящей линии связи может содержать упорядоченный набор параметров идентификации (таких как C-RNTI или их функцию), указывающий набор WTRU, которые могут принимать второй экземпляр (например, вторую DCI) сигнализации управления нисходящей линии связи в течение применимого периода времени. WTRU может получать второй параметр идентификации на основе порядка его идентификации в пределах набора параметров идентификации, указанных в первом экземпляре (например, первой DCI).
Один или более из следующих параметров, применимых к передаче по нисходящей линии связи или восходящей линии связи, могут быть получены из первого (медленного) экземпляра (например, первой DCI) сигнализации управления нисходящей линии связи с использованием процесса 1000 согласования линии связи и диспетчеризации на фиг. 10.
Указание ресурса или набора возможных ресурсов для передачи и/или для второго (быстрого) экземпляра (например, второй DCI) сигнализации управления нисходящей линии связи, относящегося к передаче (например, указание набора блоков ресурса или указание структуры во временной области, причем структура включает в себя набор возможных начальных и конечных временных символов для передачи); индикатор несущей; схема модуляции и кодирования; ранг; набор антенных портов; указание по меньшей мере одного опорного сигнала для использования в качестве опорного при синхронизации и/или опорного при демодуляции; и/или команда управления мощностью.
Один или более из следующих параметров, применимых к этой же передаче по нисходящей линии связи или восходящей линии связи, могут быть получены из второго (быстрого) экземпляра (например, второй DCI) сигнализации управления нисходящей линии связи:
Идентификатор процесса HARQ, применимый к передаче по нисходящей линии связи или восходящей линии связи; номер последовательности повторной передачи и/или версия избыточности; указание того, является ли передача повторной передачей или новыми данными (или начальной передачей); информация обратной связи HARQ (например, PHICH или значение, которое может быть логически скомбинировано с PHICH, принятым за рассматриваемый период времени (например, подкадр LTE)); указание параметра, применимого к по меньшей мере одному опорному сигналу, например по меньшей мере одного индекса циклического сдвига (например, для передачи по восходящей линии связи), причем указание относится к работе в нелицензируемых полосах, такой как запрос на предоставление информации о том, занят ли канал (например, оценка состояния канала); и/или указание ресурса для сигнализации управления, которая обеспечивает связанную с HARQ обратную информацию для этой передачи (например, HARQ-ACK по PUCCH для передачи по нисходящей линии связи, PHICH для передачи по восходящей линии связи).
Хотя признаки и элементы описаны выше в конкретных комбинациях, специалисту в данной области будет очевидно, что каждый признак или элемент может использоваться отдельно или в любой комбинации с другими признаками и элементами. Кроме того, описанные в настоящем документе способы могут быть реализованы в компьютерной программе, программном обеспечении или программно-аппаратном обеспечении, встроенном в машиночитаемый носитель и предназначенном для исполнения компьютером или процессором. Примеры машиночитаемого носителя включают в себя электронные сигналы (передаваемые по проводным и/или беспроводным соединениям) или машиночитаемые носители информации. Примеры машиночитаемого носителя информации включают в себя, без ограничений, постоянную память (ROM), оперативную память (RAM), реестр, быстродействующую буферную память, полупроводниковые устройства хранения данных, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD). Процессор в сочетании с программным обеспечением может использоваться для реализации радиочастотного приемопередатчика, предназначенного для применения в составе WTRU, UE, терминала, базовой станции, eNB, RNC и/или любого главного компьютера.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ АРХИТЕКТУРА ОБРАБОТКИ ДАННЫХ КАНАЛА L2 И УПРАВЛЕНИЯ ИМИ В ГИБКИХ СИСТЕМАХ RAT 5G | 2017 |
|
RU2704870C1 |
| ОБРАБОТКА ПЛОСКОСТИ ПОЛЬЗОВАТЕЛЯ В БЕСПРОВОДНЫХ СИСТЕМАХ | 2017 |
|
RU2711053C1 |
| ПРОИЗВОЛЬНЫЙ ДОСТУП В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ СЛЕДУЮЩЕГО ПОКОЛЕНИЯ | 2017 |
|
RU2750617C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЭФФЕКТИВНОГО ЭНЕРГОСБЕРЕЖЕНИЯ В БЕСПРОВОДНЫХ СЕТЯХ | 2017 |
|
RU2736529C2 |
| СПОСОБЫ, СИСТЕМЫ И УСТРОЙСТВА ДЛЯ ПЕРЕДАЧИ ДАННЫХ С РАЗЛИЧНОЙ СТЕПЕНЬЮ НАДЕЖНОСТИ | 2019 |
|
RU2774183C1 |
| РАСПРЕДЕЛЕННОЕ УПРАВЛЕНИЕ В СИСТЕМАХ РАДИОСВЯЗИ | 2017 |
|
RU2743580C2 |
| НАДЕЖНАЯ СИГНАЛИЗАЦИЯ УПРАВЛЕНИЯ | 2018 |
|
RU2839341C2 |
| СПОСОБЫ УПРАВЛЕНИЯ ДОСТУПОМ К КАНАЛУ | 2019 |
|
RU2773225C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ПОКРЫТИЯ УСТРОЙСТВ СВЯЗИ МАШИННОГО ТИПА (MTC) | 2013 |
|
RU2660657C1 |
| ТЕРМИНАЛЬНОЕ УСТРОЙСТВО И СПОСОБ | 2017 |
|
RU2739526C2 |


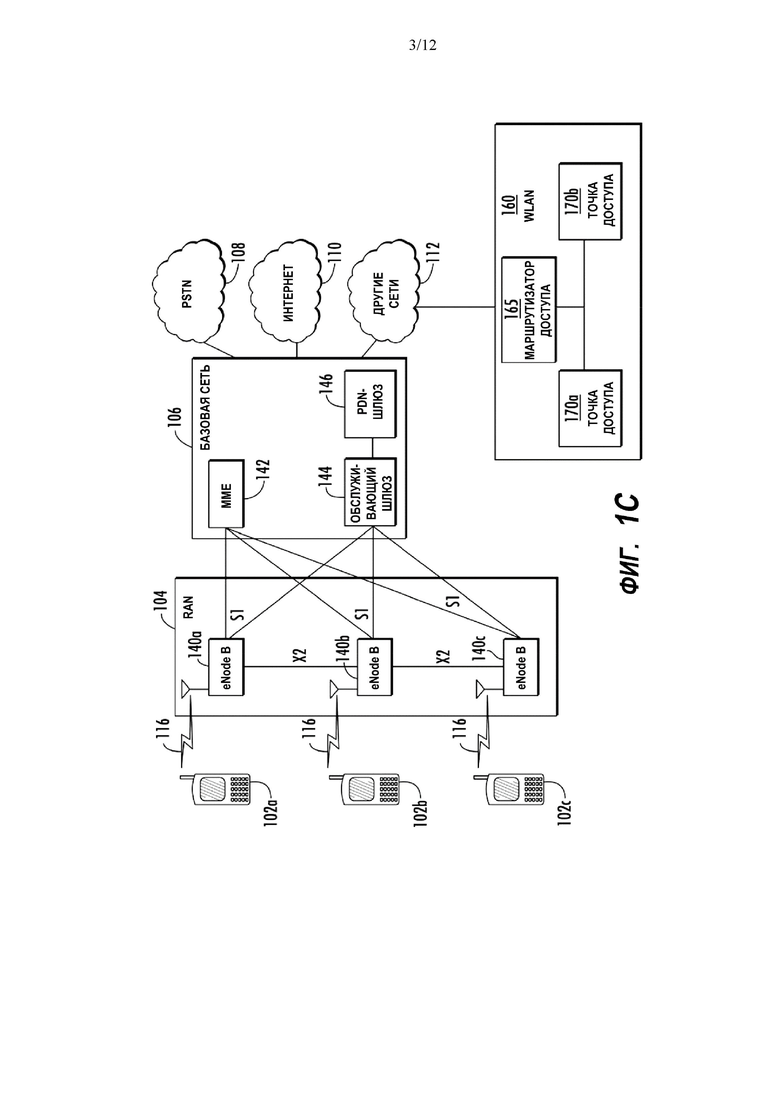
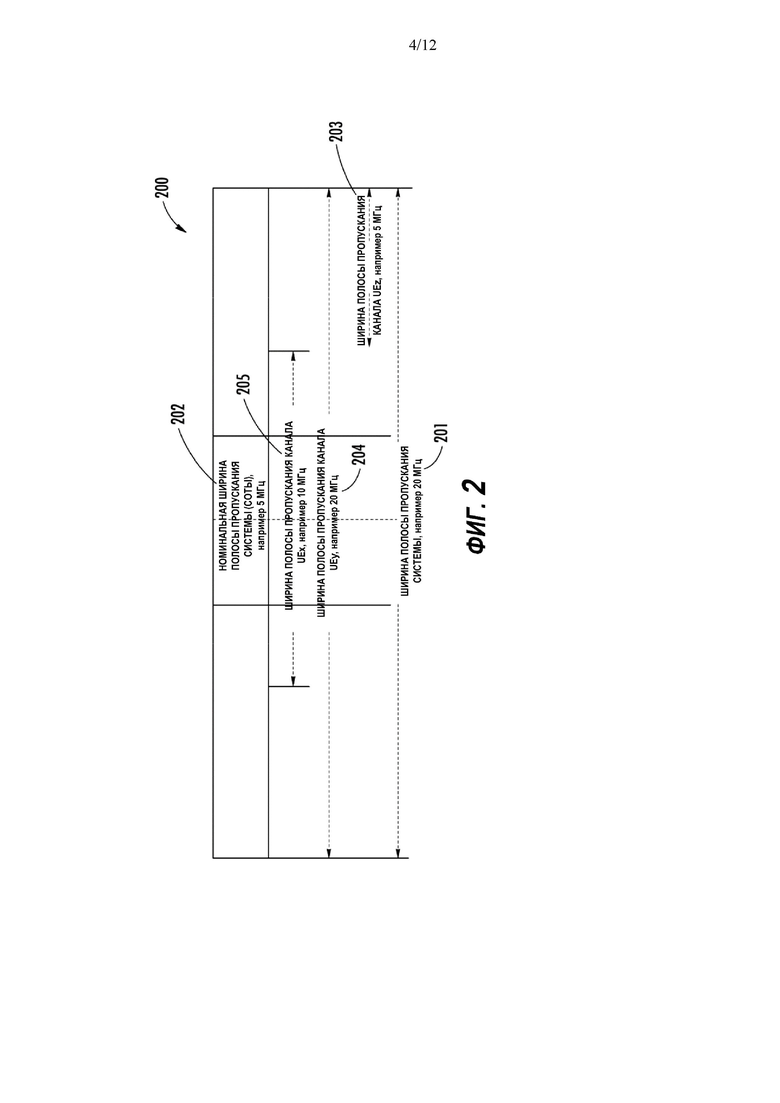
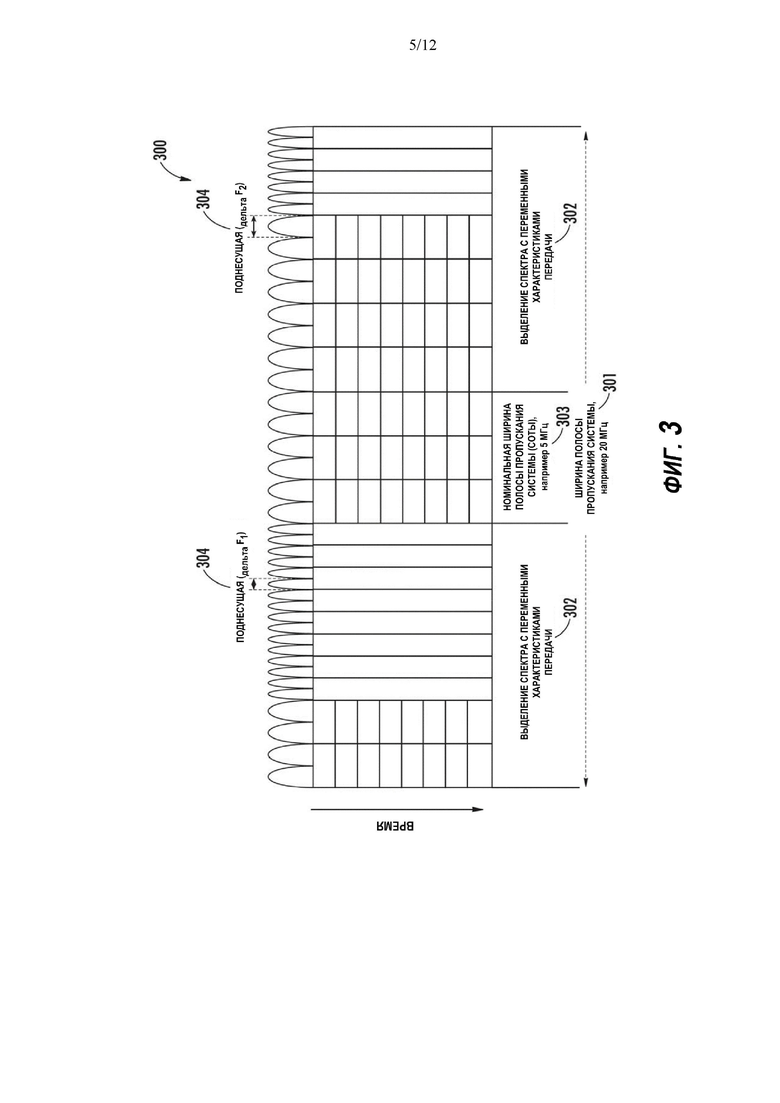






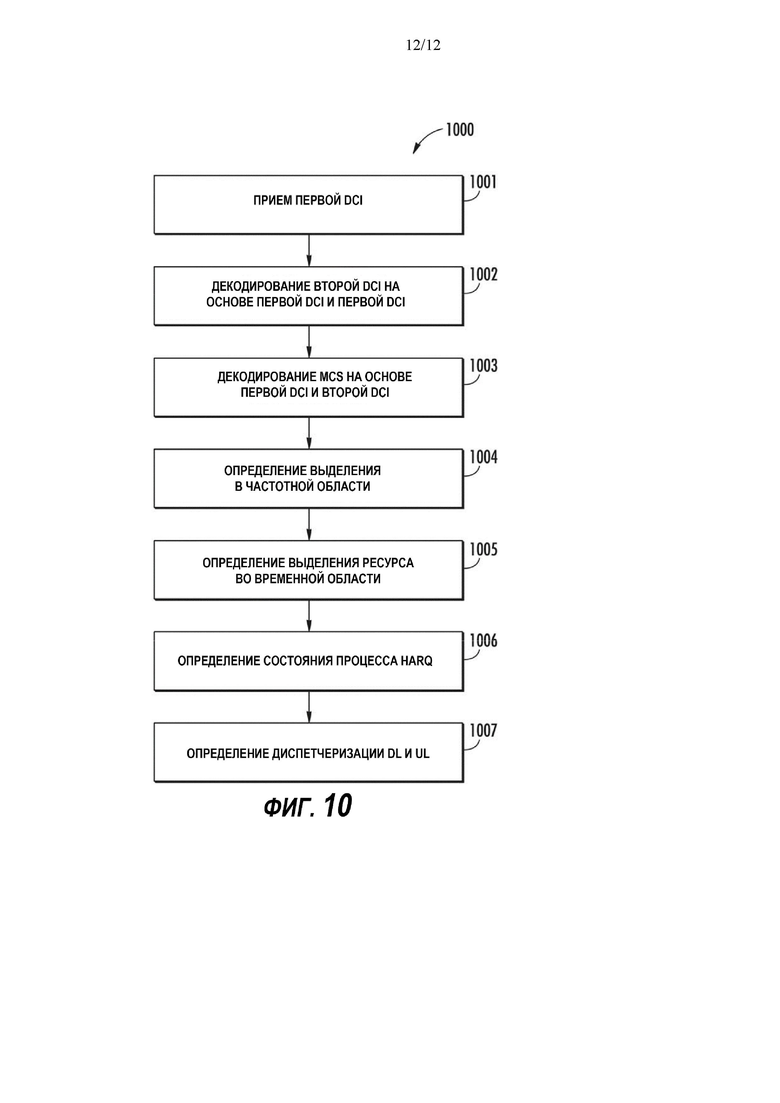
Изобретение относится к области беспроводной передачи данных. Технический результат заключается в предоставлении гибких ресурсов времени и ресурсов символов для передачи по нисходящей линии связи (DL). Способ, выполняемый модулем беспроводной передачи/приема (WTRU), содержит этапы на которых: принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU), множество ресурсов информации информации управления восходящей линии связи (UCI); принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU), множество ресурсов информации информации управления нисходящей линии связи (DCI), указывающих символы восходящей линии связи и нисходящей линии связи, указание ресурсов поднесущей, указание ресурсов времени и указание UCI-pecypca из множества UCI-ресурсов информации, причем указание ресурсов времени указывает начальный символ и количество символов; принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU) передачи по нисходящей линии связи (DL), на основе указанных ресурсов поднесущих, начального символа и продолжительности количества символов; и передают, посредством модуля беспроводной передачи/приема (WTRU), подтверждение (АСК) или уведомление об отказе (NACK) с использованием указанного UCI-pecypca. 2 н. и 8 з.п. ф-лы, 13 ил.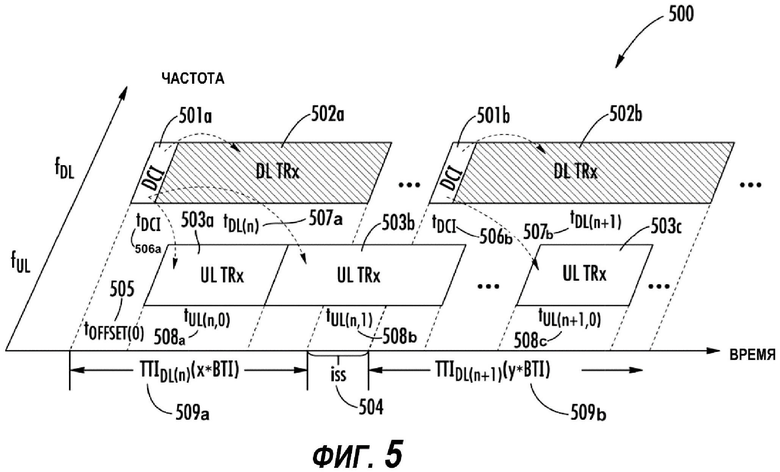
1. Способ, выполняемый модулем беспроводной передачи/приема (WTRU), содержащий этапы, на которых:
принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU), множество ресурсов информации информации управления восходящей линии связи (UCI);
принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU), множество ресурсов информации информации управления нисходящей линии связи (DCI), указывающих символы восходящей линии связи и нисходящей линии связи, указание ресурсов поднесущей, указание ресурсов времени и указание UCI-pecypca из множества UCI-ресурсов информации, причем указание ресурсов времени указывает начальный символ и количество символов;
принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU) передачи по нисходящей линии связи (DL), на основе указанных ресурсов поднесущих, начального символа и продолжительности количества символов; и
передают, посредством модуля беспроводной передачи/приема (WTRU), подтверждение (АСК) или уведомление об отказе (NACK) с использованием указанного UCI-pecypca.
2. Способ по п. 1, в котором начало порции передачи по восходящей линии связи (UL) указано посредством смещения.
3. Способ по п. 1, дополнительно содержащий этап, на котором:
определяют, посредством модуля беспроводной передачи/приема (WTRU), разнос поднесущих на основании одного из множества DCI.
4. Способ по п. 1, дополнительно содержащий этап, на котором:
определяют, посредством модуля беспроводной передачи/приема (WTRU), интервал коммутации на основании множества DCI.
5. Способ по п. 1, дополнительно содержащий этапы, на которых:
принимают, от сетевого устройства модулем беспроводной передачи/приема (WTRU), другую DCI, указывающую предоставление UL; и
передают UL-передачу, при условии что UL-передача, связанная с предоставленной UL, не перекрывается с порцией DL-передачи.
6. Модуль беспроводной передачи/приема (WTRU), содержащий:
приемник; и
процессор;
при этом приемник выполнен с возможностью:
приема от сетевого устройства множества ресурсов информации информации управления восходящей линии связи (UCI);
приема от сетевого устройства множества ресурсов информации информации управления нисходящей линии связи (DCI), указывающих символы восходящей линии связи и нисходящей линии связи, указание ресурсов поднесущей, указание ресурсов времени и указание UCI-pecypca из множества UCI-ресурсов информации, причем указание ресурсов времени указывает начальный символ и количество символов;
приема от сетевого устройства передачи по нисходящей линии связи (DL), на основе указанных ресурсов поднесущих, начального символа и продолжительности количества символов; и
при этом процессор выполнен с возможностью передачи подтверждения (АСК) или уведомления об отказе (NACK) с использованием указанного UCI-pecypca.
7. WTRU по п. 6, в котором начало порции передачи по восходящей линии связи (UL) указано посредством смещения.
8. WTRU по п. 6, в котором дополнительно:
процессор выполнен с возможностью определения разноса поднесущих на основании одного из множества DCI.
9. WTRU по п. 6, в котором дополнительно:
процессор выполнен с возможностью определения интервала коммутации на основании множества DCI.
10. WTRU по п. 6, в котором дополнительно:
приемник выполнен с возможностью приема от сетевого устройства другой DCI, указывающей предоставление UL; и
при условии что UL-передача, связанная с предоставленной UL, не перекрывается с порцией DL-передачи, передатчик выполнен с возможностью передачи UL-передачи.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ПНЕВМАТИЧЕСКИЙ ПАТРОН | 2023 |
|
RU2802091C2 |
| РАСШИРЕНИЕ ФИЗИЧЕСКИХ КАНАЛОВ УПРАВЛЕНИЯ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ | 2010 |
|
RU2502192C1 |
| СПОСОБ ДЛЯ АПЕРИОДИЧЕСКОЙ ОБРАТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ СОСТОЯНИЯ КАНАЛА В СИСТЕМЕ БЕСПРОВОДНОГО ДОСТУПА, ПОДДЕРЖИВАЮЩЕЙ АГРЕГАЦИЮ МНОЖЕСТВЕННЫХ НЕСУЩИХ | 2011 |
|
RU2537844C2 |

