Область техники, к которой относится изобретение
Настоящее изобретение относится к вентилятору в сборе и стойке для вентилятора в сборе.
Уровень техники
Обычный бытовой вентилятор обычно включает в себя набор лопаток или лопастей, установленных с возможностью вращения вокруг оси, а также приводное устройство для вращения набора лопаток для создания потока воздуха. Перемещение и циркуляция потока воздуха создает "охлаждение под действием ветра" или бриз, и в результате пользователь ощущает эффект охлаждения, когда теплота рассеивается под действием конвекции и испарения.
Некоторые вентиляторы, такие как описанные в US 5609473, предоставляют пользователю опцию регулировки направления, в котором от вентилятора исходит воздух. В US 5609473 вентилятор содержит основание и пару поперечин, каждая из которых выступает вверх от соответствующего конца основания. Во внешнем корпусе вентилятора содержится мотор и набор вращающихся лопаток. Внешний корпус прикреплен к поперечинам, так чтобы он мог поворачиваться относительно основания. Корпус вентилятора может отклоняться относительно основания от в целом вертикального, ненаклонного положения в наклонное, накрененное положение. Таким образом, направление потока воздуха, испускаемого вентилятором, может меняться.
В WO 2010/100451 описан вентилятор в сборе, в котором не используются закрытые решеткой лопатки для выброса воздуха из вентилятора в сборе. Вместо этого вентилятор в сборе содержит цилиндрическую стойку, в которой содержится крыльчатка с приводом от двигателя для втягивания первичного потока воздуха в стойку, а кольцеобразное сопло соединено со стойкой и содержит кольцевое воздуховыпускное отверстие, через которое из вентилятора выходит первичный поток воздуха. Сопло ограничивает центральное отверстие, через которое воздух из локальной окружающей среды вентилятора в сборе втягивается первичным потоком воздуха, испускаемым из воздуховыпускного отверстия, усиливая первичный поток воздуха.
Стойка содержит основание и корпус, установленный на основании. В корпусе содержится крыльчатка с приводом от двигателя. Корпус прикреплен к основанию, так что корпус может перемещаться относительно основания из неотклоненного положения в отклоненное положение, при толкании или сдвиге корпуса относительно основания. Основание разделено на верхний элемент основания и нижний элемент основания. Корпус установлен на верхнем элементе основания. Основание включает в себя колебательный механизм для раскачивания верхнего элемента основания и корпуса относительно нижнего элемента основания. У верхнего элемента основания имеется вогнутая верхняя поверхность, поверх которой установлено несколько L-образных направляющих для удерживания корпуса на основании и для направления скольжения корпуса относительно основания, когда он перемещается в отклоненное положение или из него. У корпуса имеется выпуклая поверхность, на которой установлена выпуклая наклонная пластина. Наклонная пластина содержит несколько L-образных полозьев, которые сцепляются с направляющими на верхнем элементе основания, когда наклонная пластина прикреплена к основанию, так что фланцы полозьев расположены под фланцами направляющих, имеющих соответствующую форму.
Таким образом, стойка содержит три внешних компонента; корпус, верхний элемент основания и нижний элемент основания. Верхний элемент основания содержит панель управления, которая включает в себя несколько пользовательских кнопок и диск для управления работой вентилятора в сборе, например, включением и скоростью вращения мотора, а также включением колебательного механизма. При работе колебательного механизма верхний элемент основания колеблется с корпусом относительно нижнего элемента основания, так что пользователю требуется взаимодействовать с движущейся панелью управления для управления работой вентилятора в сборе.
Раскрытие сущности изобретения
В первом аспекте настоящего изобретения предложен вентилятор в сборе, содержащий: основание;
корпус, содержащий по меньшей мере один воздухозаборник, крыльчатку и первый мотор для приведения в действие крыльчатки, чтобы втягивать поток воздуха через упомянутый по меньшей мере один воздухозаборник; по меньшей мере одно воздуховыпускное отверстие;
внутренний канал для подачи воздуха к упомянутому по меньшей мере одному воздуховыпускному отверстию, причем внутренний канал проходит вокруг отверстия, через которое воздух снаружи вентилятора в сборе втягивается воздухом, испускаемым из упомянутого по меньшей мере одного воздуховыпускного отверстия;
моторизованный колебательный механизм, расположенный в основании, для обеспечения колебания корпуса относительно основания вокруг оси колебания, причем колебательный механизм содержит второй мотор, приводной элемент, приводимый в действие вторым мотором, и ведомый элемент, который приводится в действие приводным элементом, чтобы поворачиваться относительно основания вокруг оси колебания, причем корпус установлен на ведомом элементе для того, чтобы поворачиваться с ним; и
сцепляющиеся элементы для удерживания корпуса на ведомом элементе, причем сцепляющиеся элементы расположены так, чтобы направлять отклонение корпуса относительно основания вокруг оси наклона, отличной от оси колебания, от ненаклонного положения до наклонного положения.
Таким образом, в настоящем изобретении заменяют верхний и нижний элементы основания вентилятора в сборе, описанного в WO 2010/100451, основанием, относительно которого корпус может и колебаться и наклоняться. В дополнение к сокращению числа компонентов основания, основание может быть оснащено пользовательским интерфейсом, чтобы позволить пользователю управлять вентилятором в сборе. Этот пользовательский интерфейс может тогда оставаться в неподвижном положении относительно пользователя вентилятора, независимо от положения корпуса относительно основания.
Моторизованный колебательный механизм содержит второй мотор, приводной элемент, приводимый в действие мотором, и ведомый элемент, который приводится в действие приводным элементом, чтобы он поворачивался относительно оси колебания. Второй мотор соединен с основанием, так что второй мотор остается неподвижным относительно основания. Второй мотор предпочтительно представляет собой шаговый двигатель. Ведомый элемент установлен на основании для вращения относительно него. В основании выполнены подшипники для поддерживания ведомого элемента для вращения относительно основания. Приводной элемент предпочтительно расположен так, чтобы сцепляться с периферийным участком ведомого элемента, чтобы поворачивать ведомый элемент вокруг оси колебания. Приводной элемент и ведомый элемент предпочтительно выполнены в виде зубчатых колес. Приводной элемент предпочтительно представляет собой цилиндрическое зубчатое колесо, соединенное с приводным валом второго мотора. Приводной вал второго мотора предпочтительно проходит в направлении, параллельном оси колебания. Приводной элемент предпочтительно также выполнен в форме цилиндрического зубчатого колеса, имеющего набор зубьев, расположенных на периферийном участке ведомого элемента, которые сцепляются с зубьями, выполненными на приводном элементе. Вместо цилиндрических зубчатых колес можно использовать другие типы зубчатых колес, например, косозубые зубчатые колеса, цилиндрические зубчатые колеса, червячные шестерни, реечные передачи и электромагнитные передачи.
Направлением и скоростью вращения второго мотора предпочтительно управляют с помощью управляющей схемы. Управляющая схема предпочтительно содержится в основании. В предпочтительном варианте осуществления вентилятор в сборе содержит пульт дистанционного управления для передачи управляющих сигналов на пользовательский интерфейс в ответ на нажатие пользователем одной или нескольких кнопок на пульте дистанционного управления. Пользовательский интерфейс предпочтительно содержит схему пользовательского интерфейса, у которой имеется приемник для приема управляющих сигналов, передаваемых пультом дистанционного управления. Схема пользовательского интерфейса подает принятые управляющие сигналы на схему управления. Это может дать возможность пользователю включать колебательный механизм с использованием пульта дистанционного управления. Чтобы пользователь мог управлять вентилятором в сборе без использования пульта дистанционного управления, пользовательский интерфейс также может содержать исполнительный элемент, например, нажимную кнопку, установленный на основании, для включения переключателя схемы пользовательского интерфейса путем перемещения исполнительного элемента к переключателю. Исполнительный элемент может быть устроен так, чтобы передавать управляющие сигналы, принятые от пульта дистанционного управления приемником, так что может выполнять двойную функцию включения переключателя, предпочтительно в ответ на прижимание пользователем исполнительного элемента к переключателю, и передачи на приемник управляющих сигналов, которые были переданы пультом дистанционного управления и которые попадают на исполнительный элемент. Эта двойная функция исполнительного элемента допускает выполнение прибора без специального окошка или другого специального светопроводящего компонента для передачи сигналов, переданных пультом дистанционного управления на приемник, тем самым сокращая издержки производства.
Как отмечалось выше, исполнительный элемент предпочтительно представляет собой нажимную кнопку, которая может быть нажата пользователем для контакта с переключателем, чтобы изменить рабочий режим, состояние или настройки вентилятора в сборе. Например, управляющая схема может быть устроена так, чтобы в ответ на нажатие пользователем на исполнительный элемент включать первый мотор для приведения в движение крыльчатки. Как вариант, исполнительный элемент может быть выполнен в виде сдвижного выключателя, поворотного выключателя или диска. Преимущество выполнения исполнительного элемента в виде нажимной кнопки заключается в том, что оптический путь для передачи световых сигналов на приемник может сохраняться независимо от текущего положения исполнительного элемента относительно переключателя.
Управляющая схема может быть устроена так, чтобы включать второй мотор на заданной скорости, как в прямом, так и в обратном направлении, или с переменной скоростью, как в прямом, так и в обратном направлении. Управляющая схема может быть запрограммирована так, чтобы изменять скорость второго мотора заранее определенным способом в течение цикла колебаний. Например, скорость второго мотора может изменяться синусоидально во время цикла колебаний. Как вариант или в дополнение, скорость второго мотора может изменяться с использованием пульта дистанционного управления. В течение каждого цикла колебаний корпус может поворачиваться вокруг оси колебания на угол в диапазоне от 0 до 360°, предпочтительно на угол в диапазоне от 60 до 240°. Управляющая схема может быть устроена так, чтобы сохранять несколько предварительно заданных шаблонов колебаний, а пользователь может выбрать один из этих шаблонов, используя пульт дистанционного управления. Эти шаблоны колебаний могут иметь различные углы колебаний, например, 90°, 120° и 180°.
Корпус установлен на ведомом элементе, чтобы поворачиваться вместе с ним относительно основания. Сцепляющиеся элементы выполнены для удерживания корпуса на ведомом элементе. Корпус предпочтительно установлен непосредственно на ведомом элементе, так что в предпочтительном варианте осуществления сцепляющиеся элементы содержат первый сцепляющийся элемент, расположенный на ведомом элементе, и второй сцепляющийся элемент, расположенный на корпусе, и который удерживается первым сцепляющимся элементом. Как вариант, между корпусом и ведомым элементом может быть выполнен один или несколько соединителей и/или соединительных элементов для крепления корпуса к ведомому элементу, так что по меньшей мере один из сцепляющихся элементов может быть выполнен на таком соединительном элементе.
Корпус предпочтительно содержит пластину, соединенную с внешней оболочкой корпуса. Второй сцепляющийся элемент предпочтительно образует часть этой пластины. Пластина предпочтительно присоединена к внешней оболочке, так что внешняя оболочка окружает по меньшей мере внешний периметр пластины.
Вентилятор в сборе предпочтительно содержит несколько пар этих сцепляющихся элементов для удерживания корпуса на ведомом элементе. Каждая пара сцепляющихся элементов предпочтительно содержит первый сцепляющийся элемент, расположенный на ведомом элементе, и второй сцепляющийся элемент, расположенный на корпусе, и который удерживается первым сцепляющимся элементом. Каждый из сцепляющихся элементов предпочтительно содержит изогнутый фланец, который проходит в направлении отклонения корпуса относительно основания. Фланцы каждой пары сцепляющихся элементов предпочтительно обладают по существу одной и той же кривизной. При сборке фланец второго сцепляющегося элемента сдвигают под фланцем первого сцепляющегося элемента, так что фланец первого сцепляющегося элемента не дает корпусу подняться от ведомого элемента и, таким образом, от основания. Там, где корпус содержит пластину, вторые сцепляющиеся элементы предпочтительно соединены с этой пластиной или составляют ее часть иным образом. При сборке фланцы вторых сцепляющихся элементов сдвигают под фланцами первых сцепляющихся элементов до того, как платина будет закреплена на внешней оболочке корпуса.
Корпус можно вручную сдвигать относительно основания из ненаклонного положения в наклонное положение. Это может позволить легко сдвигать корпус относительно основания, например, либо толкая, либо притягивая корпус относительно основания между наклонным и ненаклонным положениями. Хотя перемещение корпуса вручную относительно основания является сравнительно простым, если корпус неподвижен относительно основания, пользователю может быть неудобно наклонять корпус относительно основания, когда корпус колеблется относительно основания, так что в предпочтительном варианте осуществления вентилятор в сборе содержит моторизованный приводной механизм для включения перемещения корпуса относительно основания вокруг оси наклона. Предпочтительно, приводной механизм содержит третий мотор, а второй приводной элемент движется под действием третьего мотора. Третий мотор также предпочтительно выполнен в виде шагового двигателя. Второй приводной элемент предпочтительно выполнен в виде зубчатого колеса, и предпочтительно является цилиндрическим зубчатым колесом, соединенным с валом третьего мотора.
Направление и скорость вращения третьего мотора предпочтительно контролируется управляющей схемой. Управляющая схема может быть устроена так, чтобы вращать третий мотор с заданной скоростью и в прямом и в обратном направлении, чтобы перемещать корпус из ненаклонного, или первого наклонного относительно основания положения, во второе наклонное относительно основания положение. Корпус может поворачиваться вокруг оси наклона на угол в диапазоне от -20 до 20°, предпочтительно на угол в диапазоне от -10 до 10°. Включением третьего мотора может управлять пользователь путем нажатия соответствующей кнопки на пульте дистанционного управления.
Управляющая схема может быть устроена так, чтобы одновременно задействовать второй мотор и третий мотор, чтобы способствовать распространению воздушного потока, создаваемого вентилятором в сборе, по комнате или другому жилому помещению. Этот рабочий режим вентилятора в сборе может быть включен пользователем путем нажатия на специальную кнопку на пульте дистанционного управления. Управляющая схема может быть устроена так, чтобы сохранять несколько предварительно заданных шаблонов перемещения корпуса относительно основания, а пользователь может выбрать один из этих шаблонов, используя пользовательский интерфейс или пульт дистанционного управления вентилятора в сборе.
Третий мотор предпочтительно соединен с корпусом для перемещения вместе с ним, когда корпус перемещается вокруг оси наклона. Третий мотор предпочтительно установлен на наклонной пластине. Если второй сцепляющийся элемент(ы) соединен с поверхностью наклонной пластины, которая обращена к основанию, то третий мотор предпочтительно соединен с противоположной стороной наклонной пластины. Второй приводной элемент предпочтительно сцепляется с ведомым элементом колебательного механизма так, что мотор и приводной элемент приводного механизма перемещаются относительно ведомого элемента вокруг оси наклона при включении приводного механизма. Ведомый элемент содержит набор зубьев для сцепления с зубьями второго приводного элемента, и этот набор зубьев предпочтительно расположен на центральном участке ведомого элемента. Этот набор зубьев предпочтительно проходит вокруг оси наклона. Ось наклона предпочтительно по существу перпендикулярна оси колебания.
В предпочтительном варианте осуществления внешние поверхности основания и корпуса имеют по существу один и тот же профиль. Например, профиль внешних поверхностей основания и корпуса может быть по существу круглым, эллиптическим или многогранным.
Сцепляющиеся элементы предпочтительно охватываются внешними поверхностями основания и корпуса, когда корпус находится в ненаклонном положении. Это делает внешний вид вентилятора в сборе аккуратным и единообразным, и может препятствовать попаданию пыли и грязи между сцепляющимися элементами.
Внутренний канал и по меньшей мере одно воздуховыпускное отверстие вентилятора в сборе предпочтительно ограничено соплом, установленным на корпусе или присоединенным к нему. Таким образом, основание и корпус могут вместе образовывать стойку, на которую устанавливают сопло. По меньшей мере одно воздуховыпускное отверстие может быть расположено на переднем крае сопла или у него. Как вариант, по меньшей мере одно воздуховыпускное отверстие может быть расположено у заднего края сопла. Сопло может содержать одно воздуховыпускное отверстие или несколько воздуховыпускных отверстий. В одном примере сопло содержит одно кольцевое воздуховыпускное отверстие, проходящее вокруг отверстия, и это воздуховыпускное отверстие может иметь круглую форму или другую форму, которая совпадает с формой переднего края сопла. Внутренний канал предпочтительно содержит первый участок и второй участок, каждый из которых предназначен для приема соответствующей части воздушного потока, поступающего во внутренний канал, и для направления частей воздушного потока в противоположных угловых направлениях вокруг отверстия. Каждый участок внутреннего канала может содержать соответствующее воздуховыпускное отверстие. Сопло предпочтительно является по существу симметричным относительно плоскости, проходящей через центр сопла. Например, сопло может иметь в целом круглую, эллиптическую форму или форму "скакового круга", в которой каждый участок внутреннего канала содержит сравнительно прямой участок, расположенный на соответствующей стороне отверстия. Если сопло имеет форму в виде скакового круга, то каждый прямой участок сопла может содержать соответствующее воздуховыпускное отверстие. Воздуховыпускное отверстие или каждое из них предпочтительно имеет форму щели. Щель предпочтительно имеет ширину в диапазоне от 0,5 до 5 мм.
Во втором аспекте настоящего изобретения предложена стойка для вентилятора в сборе, причем стойка содержит: основание; корпус, содержащий по меньшей мере один воздухозаборник, крыльчатку, мотор для приведения в действие крыльчатки, чтобы втягивать поток воздуха через упомянутый по меньшей мере один воздухозаборник, и по меньшей мере одно воздуховыпускное отверстие; моторизованный колебательный механизм, содержащийся в основании и предназначенный для выполнения колебаний корпуса относительно основания вокруг оси колебания, причем колебательный механизм содержит мотор, приводной элемент, приводимый в действие мотором, и ведомый элемент, который приводится в действие приводным элементом, чтобы поворачиваться относительно основания вокруг оси колебания, причем корпус устанавливают на ведомом элементе, чтобы поворачиваться вместе с ним; и сцепляющиеся элементы для удерживания корпуса на ведомом элементе, причем сцепляющиеся элементы содержат первый сцепляющийся элемент, расположенный на ведомом элементе, и второй сцепляющийся элемент, расположенный на корпусе, и который удерживается первым сцепляющимся элементом; причем сцепляющиеся элементы расположены так, чтобы направлять отклонение корпуса относительно основания вокруг оси наклона, отличной от оси колебания, от ненаклонного положения до наклонного положения.
В третьем аспекте в настоящем изобретении предложена стойка для вентилятора в сборе, причем стойка содержит основание, содержащее пользовательский интерфейс для управления работой вентилятора в сборе, корпус, установленный на основании, при этом корпус содержит по меньшей мере один воздухозаборник, крыльчатку, мотор для вращения крыльчатки, чтобы затягивать воздушный поток через упомянутый по меньшей мере один воздухозаборник, и воздуховыпускное отверстие; первый моторизованный приводной механизм для выполнения колебаний корпуса относительно основания вокруг первой оси; и второй моторизованный приводной механизм для перемещения корпуса относительно основания вокруг второй оси, отличной от первой оси, из ненаклонного положения в наклонное положение и обратно.
Приводные механизмы предпочтительно содержат общий элемент, предпочтительно в виде зубчатого колеса, предназначенный для создания первого крутящего момента, который перемещает корпус относительно первой оси, и второго крутящего момента, который перемещает корпус относительно второй оси. Общий элемент предпочтительно представляет собой ведомый элемент первого приводного механизма. Каждый из приводных механизмов предпочтительно содержит соответствующий мотор и соответствующий приводной элемент, приводимый в движение мотором, предназначенный для сцепления с этим общим элементом приводных механизмов. Мотор и приводной элемент первого приводного механизма предпочтительно соединены с основанием. Мотор и приводной элемент второго приводного механизма предпочтительно соединены с корпусом. Предпочтительно, приводные элементы устроены так, чтобы сцепляться с соответствующим участком общего элемента. Например, приводной элемент первого приводного механизма может сцепляться с периферийным участком общего элемента, в то время как приводной элемент второго приводного механизма может сцепляться с центральным участком общего элемента. Каждый участок общего элемента предпочтительно содержит соответствующий набор зубьев. Наборы зубьев предпочтительно устроены так, что во время работы первого приводного механизма сцепление приводного элемента первого приводного механизма и общего элемента приводит к вращению общего элемента вокруг первой оси, в то время как при работе второго приводного механизма сцепление приводного элемента второго приводного механизма и общего элемента приводит к перемещению мотора и приводного элемента второго приводного механизма вокруг второй оси. Каждый набор зубьев предпочтительно проходит вокруг соответствующей первой или второй оси. Первая ось предпочтительно по существу перпендикулярна второй оси.
В четвертом аспекте в настоящем изобретении предложен вентилятор в сборе, содержащий основание, содержащее пользовательский интерфейс для управления работой вентилятора в сборе; корпус, установленный на основании, причем корпус содержит по меньшей мере один воздухозаборник, крыльчатку, мотор для приведения в действие крыльчатки, чтобы втягивать поток воздуха через упомянутый по меньшей мере один воздухозаборник; по меньшей мере одно воздуховыпускное отверстие; внутренний канал для подачи воздуха к упомянутому по меньшей мере одному воздуховыпускному отверстию, причем внутренний канал проходит около отверстия, через которое воздух снаружи вентилятора в сборе втягивается воздухом, испускаемым из упомянутого по меньшей мере одного воздуховыпускного отверстия; первый моторизованный приводной механизм для выполнения колебаний корпуса относительно основания вокруг первой оси; и второй моторизованный приводной механизм для перемещения корпуса относительно основания вокруг второй оси, отличной от первой оси, из ненаклонного положения в наклонное положение и обратно.
Признаки, описанные выше применительно к первому аспекту изобретения, одинаково применимы и к аспектам изобретения со второго по четвертый, и наоборот.
Краткое описание чертежей
Теперь только в качестве примера будет описан вариант осуществления изобретения со ссылкой на прилагаемые чертежи.
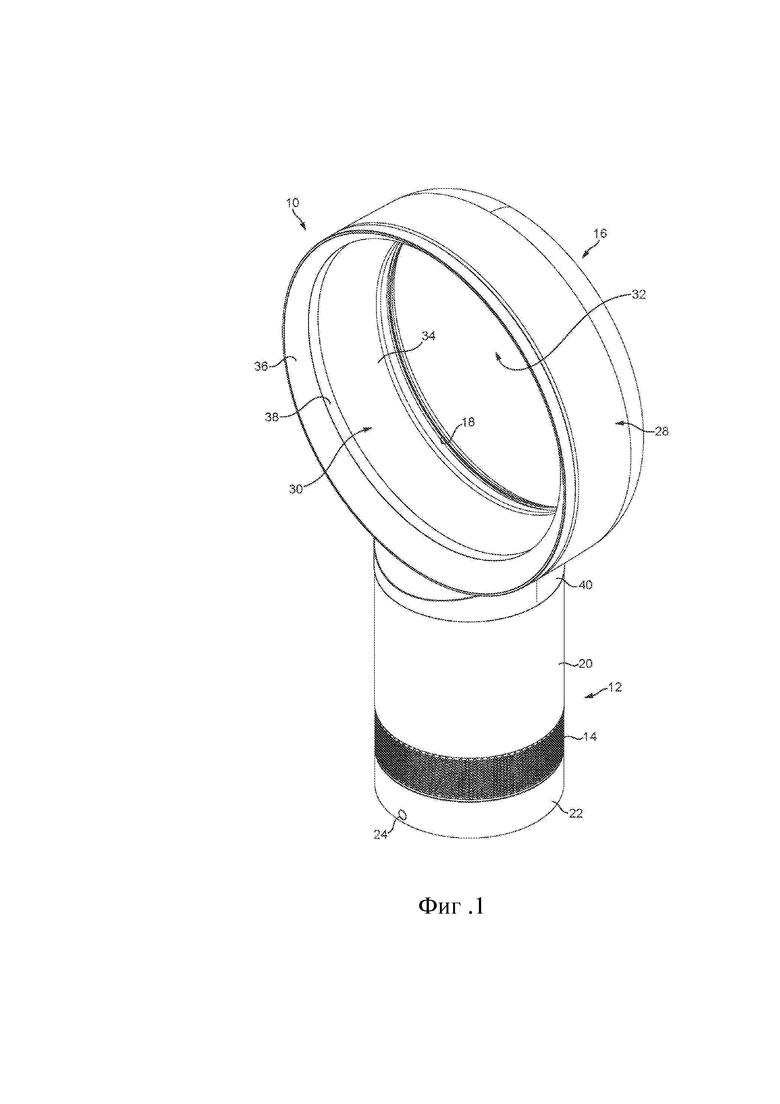
На фиг. 1 показан вид в перспективе спереди вентилятора в сборе;
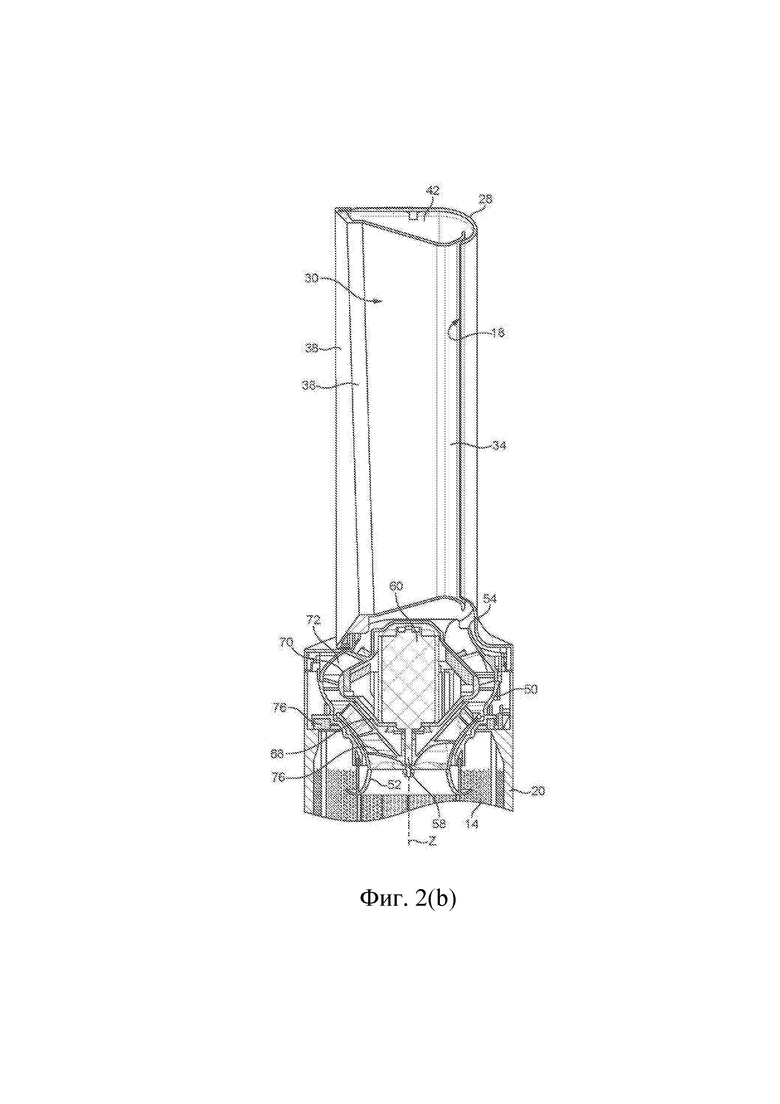
на фиг. 2(а) – вид спереди в разрезе сопла и части корпуса вентилятора в сборе, а на фиг. 2(b) – вид сбоку в разрезе сопла и части корпуса вентилятора в сборе;
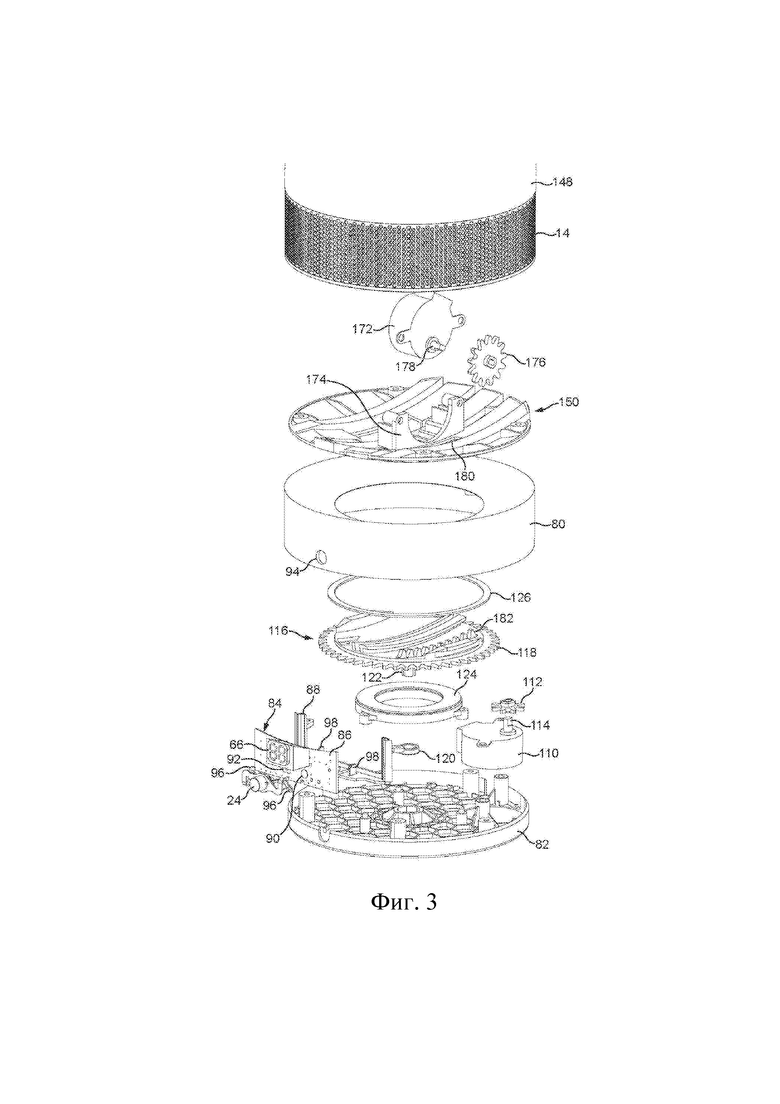
на фиг. 3 – основание вентилятора в сборе и моторизованных механизмов, предназначенных для перемещения корпуса относительно основания, вид с пространственным разделением деталей;
на фиг. 4(а) – вид сбоку зубчатого колеса моторизованных механизмов, а на фиг. 4(b) – вид зубчатого колеса в перспективе сверху;
на фиг. 5(а) – вид сверху наклонной пластины корпуса, на фиг. 5(b) – вид наклонной пластины в перспективе снизу, на фиг. 5(с) – вид наклонной пластины в перспективе сверху, а на фиг. 5(d) – вид наклонной пластины сзади;
на фиг. 6 – вид сверху вентилятора в сборе;
на фиг 7(а) – вид основания сбоку в разрезе вдоль прямой С-С на фиг. 6; на фиг 7(b) – вид основания спереди в разрезе вдоль прямой А-А на фиг. 6; на фиг 7(с) – вид основания сбоку в разрезе вдоль прямой В-В на фиг. 6;
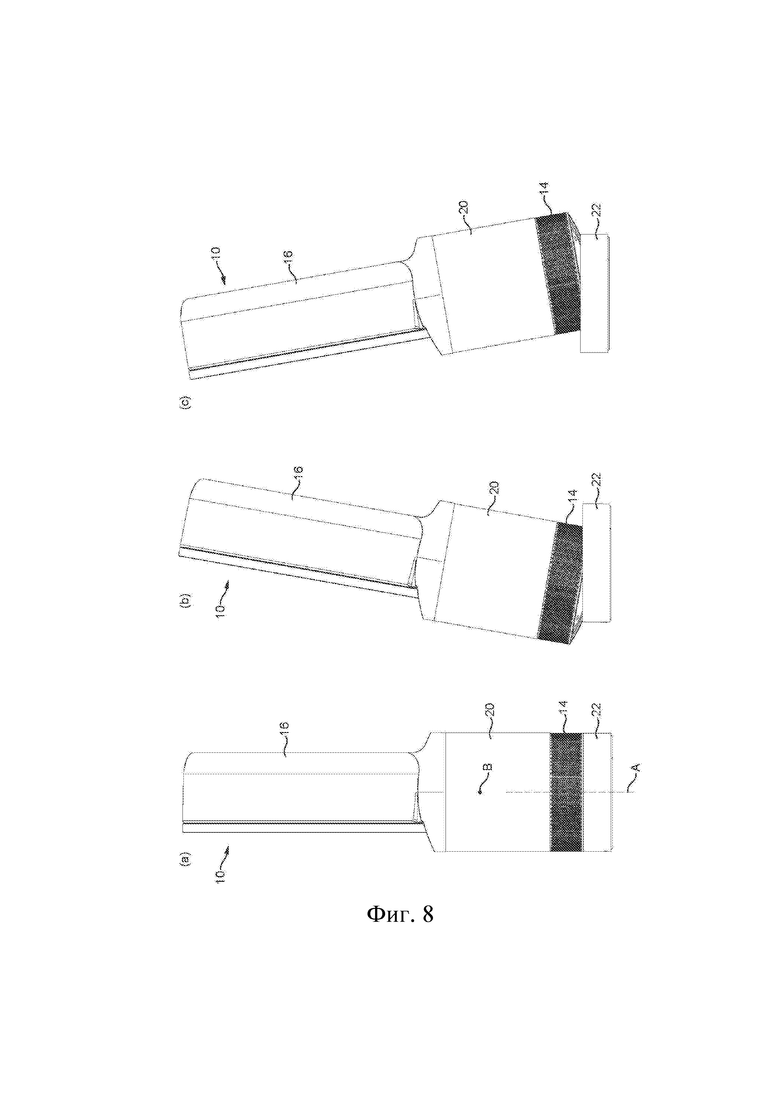
на фиг. 8(а) – вид сбоку вентилятора в сборе, при этом корпус находится в ненаклонном положении относительно основания, на фиг. 8(b) – вид сбоку вентилятора в сборе, при этом корпус находится в первом полностью отклоненном положении относительно основания, и на фиг. 8(с) – вид сбоку вентилятора в сборе, при этом корпус находится во втором полностью отклоненном положении относительно основания;
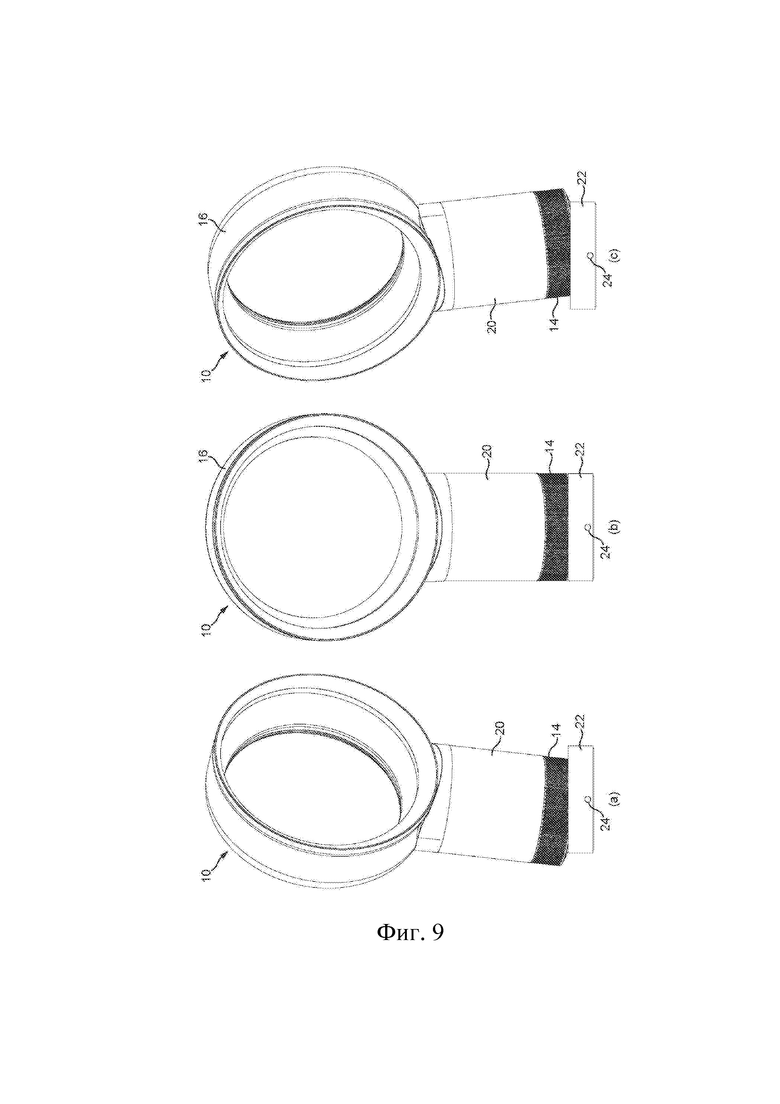
на фиг. 9(a), 9(b) и 9(c) – виды спереди вентилятора в сборе на различных стадиях цикла колебательного движения корпуса относительно основания, при этом корпус находится во втором полностью отклоненном положении относительно основания; и
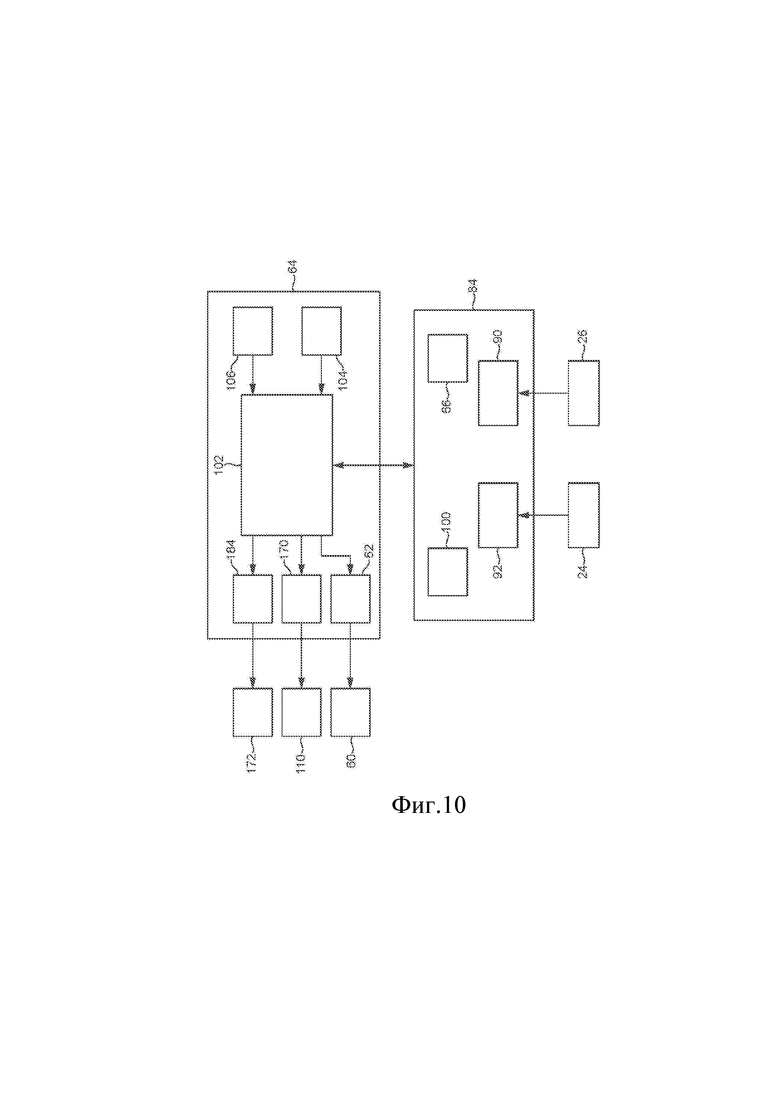
на фиг. 10 – схематическая иллюстрация компонентов схемы пользовательского интерфейса и управляющей схемы вентилятора в сборе.
Осуществление изобретения
На фиг. 1 приведен внешний вид вентилятора 10 в сборе. Вентилятор 10 в сборе содержит стойку 12, имеющую воздухозаборник 14 в виде множества отверстий, выполненных во внешней оболочке стойки 12, через которые в стойку 12 из внешней среды втягивается первичный воздушный поток. Кольцеобразное сопло 16, имеющее воздуховыпускное отверстие 18 для испускания первичного воздушного потока из вентилятора 10 в сборе, присоединено к верхнему концу стойки 12.
Стойка 12 содержит корпус 20 и основание 22. Как более подробно описано ниже, корпус 20 подвижен относительно основания 22. Корпус 20 может колебаться относительно основания 22 вокруг первой оси А колебания, а также наклоняться относительно основания вокруг второй оси В наклона. В этом примере ось А колебания по существу перпендикулярна оси В наклона и по существу коллинеарна продольной оси стойки 12.
Основание 22 содержит управляемый пользователем исполнительный элемент 24, позволяющий пользователю управлять рабочим состоянием вентилятора 10 в сборе. Вентилятор 10 в сборе также включает в себя пульт 26 дистанционного управления (схематично показан на фиг. 10), позволяющий пользователю удаленно управлять рабочими состояниями и настройками вентилятора 10 в сборе. Если пульт 26 дистанционного управления не используют, то он может храниться на верхней поверхности сопла 16.
Сопло 16 имеет кольцеобразную форму. Также, как показано на фиг. 2(а) и 2(b), сопло 16 содержит внешнюю стенку 28, проходящую вокруг кольцеобразной внутренней стенки 30. В этом примере каждая из стенок 28, 30 образована отдельным компонентом. Каждая из стенок 28, 30 имеет передний край и задний край. Задний край внешней стенки 28 изгибается вовнутрь в сторону заднего края внутренней стенки 30, чтобы ограничить задний край сопла 16. Передний край внутренней стенки 30 загнут наружу в сторону переднего края внешней стенки 28, чтобы ограничить передний край сопла 16. Передний край внешней стенки 28 вставлен в щель, расположенную на переднем крае внутренней стенки 30, и соединен с внутренней стенкой 30 с использованием клея, введенного в щель.
Внутренняя стенка 30 проходит вокруг оси, или продольной оси, Х, чтобы образовать канал, или отверстие 32 сопла 16. Отверстие 32 имеет в целом круглое поперечное сечение, которое меняется в диаметре вдоль оси Х от заднего края сопла 16 к переднему краю сопла 16.
Внутренняя стенка 30 имеет такую форму, что внешняя поверхность внутренней стенки 30, то есть поверхность, которая ограничивает отверстие 32, имеет несколько участков. Внешняя поверхность внутренней стенки 30 имеет выпуклый задний участок 34, расширяющийся наружу передний участок 36 в виде усеченного конуса и цилиндрический участок 38, расположенный между задним участком 34 и передним участком 36.
Внешняя стенка 28 содержит основание 40, которое соединено с открытым верхним концом корпуса 20 и у которого имеется открытый нижний конец, обеспечивающий впуск воздуха для приема первичного воздушного потока из корпуса 20. Большая часть внешней стенки 28 имеет в целом цилиндрическую форму. Внешняя стенка 28 проходит вокруг центральной оси, или продольной оси, Y, которая параллельна оси Х, но находится от нее на некотором расстоянии. Другими словами, внешняя стенка 28 и внутренняя стенка 30 не имеют один центр. В этом примере ось Х расположена выше оси Y, при этом каждая из осей X, Y расположена в плоскости, которая проходит вертикально через центр вентилятора 10 в сборе.
Задний край внешней стенки 28 имеет такую форму, чтобы перекрывать задний край внутренней стенки 30, ограничивая воздуховыпускное отверстие 18 сопла 16 между внутренней поверхностью внешней стенки 28 и внешней поверхностью внутренней стенки 30. Воздуховыпускное отверстие 18 имеет форму в целом кольцевой щели с центром на оси Х, проходящей вокруг этой оси. Ширина щели предпочтительно по существу постоянна вокруг оси Х и принимает значение в диапазоне от 0,5 до 5 мм. Перекрывающиеся участки внешней стенки 28 и внутренней стенки 30 по существу параллельны и расположены так, чтобы направлять воздух по выпуклому заднему участку 34 внутренней стенки 30, который обеспечивает поверхность Коанда сопла 16.
Внешняя стенка 28 и внутренняя стенка 30 ограничивают внутренний канал 42 для передачи воздуха к воздуховыпускному отверстию 18. Внутренний канал 42 проходит вокруг отверстия 32 сопла 16. В виду эксцентричности стенок 28, 30 сопла 16, площадь поперечного сечения внутреннего канала 42 изменяется в направлении вокруг отверстия 32. Можно считать, что внутренний канал 42 содержит первый и второй искривленные участки 44, 46, которые проходят в противоположных угловых направлениях вокруг отверстия 32. Каждый искривленный участок 44, 46 внутреннего канала имеет площадь поперечного сечения, которая уменьшается в размере в направлении вокруг отверстия 32.
Корпус 20 и основание 22 предпочтительно выполнены из пластиковых материалов. Корпус 20 и основание 22 предпочтительно имеют по существу один и тот же внешний диаметр, так что внешняя поверхность корпуса 20 по существу расположена на одном уровне с внешней поверхностью основания 22, когда корпус 20 находится в ненаклонном положении относительно основания 22, как показано на фиг. 8(а). В этом примере корпус 20 и основание 22 имеют по существу цилиндрическую боковую стенку.
Корпус 20 содержит воздухозаборник 14, через который первичный воздушный поток поступает в вентилятор 10 в сборе. В этом примере воздухозаборник 14 содержит множество отверстий, выполненных во внешней оболочке корпуса 20. Как вариант, воздухозаборник 14 может содержать одну или несколько решеток или сеток, установленных в окошках, выполненных во внешней оболочке корпуса 20. Корпус 20 открыт на верхнем конце (как показано) для соединения с основанием 40 сопла 16, и чтобы первичный поток воздуха мог переходить из корпуса 20 в сопло 16.
Корпус 20 содержит канал 50, у которого имеется первый конец, ограничивающий воздухозаборник 52 канала 50, и второй конец, расположенный напротив первого конца и ограничивающий воздуховыпускное отверстие 54 канала 50. Канал 50 выровнен с корпусом 20, так что продольная ось канала 50 коллинеарна продольной оси корпуса 20, и так что воздухозаборник 52 расположен под воздуховыпускным отверстием 54. Воздуховыпускное отверстие 54 образует воздуховыпускное отверстие корпуса 20, и, в свою очередь, образует воздуховыпускное отверстие стойки 12, из которого воздух передают к соплу 16 вентилятора 10 в сборе.
Канал 50 проходит вокруг крыльчатки 56, чтобы затягивать первичный воздушный поток в корпус 20 вентилятора 10 в сборе. Крыльчатка 56 представляет собой лопаточное колесо с косым потоком. Крыльчатка 56 содержит в целом коническую ступицу, несколько лопаток крыльчатки соединено со ступицей, а кожух, имеющий в целом форму в виде усеченного конуса, соединен с лопатками так, чтобы окружать ступицу и лопатки. Лопатки предпочтительно выполнены как единое целое со ступицей, которая предпочтительно выполнена из пластикового материала.
Крыльчатка 56 соединена с вращающимся валом 58, проходящим из мотора 60, чтобы вращать крыльчатку 56 вокруг оси Z вращения. Ось Z вращения коллинеарна продольной оси канала 50 и перпендикулярна осям X, Y. В этом примере мотор 60 представляет собой бесщеточный мотор постоянного тока, скорость которого меняется с помощью драйвера 62 бесщеточного мотора постоянного тока главной управляющей схемы 64 вентилятора 10 в сборе. Главная управляющая схема 64 схематично показана на фиг. 10. Как более подробно описано ниже, пользователь может регулировать скорость мотора 60 с использованием исполнительного элемента 24 или пульта 26 дистанционного управления. В этом примере пользователь может выбрать одну из десяти различных установок скорости, каждая из которых соответствует соответствующей скорости вращения мотора 60. Номер текущей установки скорости отображается на дисплее 66, когда пользователь меняет установку скорости.
Мотор 60 заключен в корпусе мотора. Внешняя стенка канала 50 окружает корпус мотора, который составляет внутреннюю стенку канала 50. Стенки канала 50, таким образом, ограничивают кольцеобразный путь для воздушного потока, который проходит через канал 50. Корпус мотора содержит нижний участок 68, который поддерживает мотор 60, и верхний участок 70, соединенный с нижним участком 68. Вал 58 выступает через отверстие, выполненное в нижнем участке 68 корпуса мотора, чтобы можно было соединить крыльчатку 56 с валом 58. Мотор 60 вставляют в нижний участок 68 корпуса мотора до соединения верхнего участка 70 с нижним участком 68. Нижний участок 68 корпуса мотора имеет в целом форму в виде усеченного конуса и сужается вовнутрь в направлении воздухозаборника 52 канала 50. Верхний участок 70 корпуса мотора имеет в целом форму в виде усеченного конуса и сужается вовнутрь в направлении воздуховыпускного отверстия 54 канала 50. Кольцеобразный диффузор 72 расположен между внешней стенкой канала 50 и верхним участком 70 корпуса мотора. Диффузор 72 содержит несколько лопаток для направления воздушного потока к воздуховыпускному отверстию 54 канала 50. Лопатки имеют такую форму, что воздушный поток также выпрямляется, когда он проходит через диффузор 72. Кабель для передачи электроэнергии к мотору 60 проходит через внешнюю стенку канала 50, диффузор 72 и верхний участок 70 корпуса мотора. Верхний участок 70 корпуса мотора перфорирован, а внутренняя поверхность верхнего участка 70 корпуса мотора покрыта шумопоглощающим материалом 74, предпочтительно акустическим пористым материалом, чтобы подавить широкополосный шум, создаваемый при работе вентилятора 10 в сборе.
Канал 50 установлен на кольцевом гнезде, расположенном в корпусе 20. Гнездо проходит радиально вовнутрь от внутренней поверхности внешней оболочки корпуса 20, так что верхняя поверхность гнезда по существу перпендикулярна оси Z вращения крыльчатки 56. Кольцевое уплотнение 76 расположено между каналом 50 и гнездом. Кольцевое уплотнение 76 предпочтительно представляет собой губчатое кольцевое уплотнение и предпочтительно выполнено из пенопласта с закрытыми порами. Кольцевое уплотнение 76 имеет нижнюю поверхность, которая плотно примыкает к верхней поверхности гнезда, и верхнюю поверхность, которая плотно примыкает к каналу 50. Гнездо содержит отверстие, чтобы кабель (не показан) мог проходить к мотору 60. Кольцевое уплотнение 76 имеет такую форму, чтобы ограничивать выемку, предназначенную для вмещения части кабеля. Вокруг кабеля может быть выполнено одно или несколько прокладочных колец или других уплотнительных элементов, чтобы не пропускать воздух через отверстие, а также между выемкой и внутренней поверхностью боковой стенки корпуса 20.
Как показано на фиг. 3-7, основание 22 содержит кольцеобразный внешний корпус 80 и кольцеобразную пластину 82 основания, неподвижно соединенную с внешним корпусом 80. В основании содержится схема 84 пользовательского интерфейса. Схема 84 пользовательского интерфейса содержит множество компонентов, которые установлены на печатной плате 86. Печатная плата 86 удерживается на раме 88, соединенной с пластиной 82 основания 22. Схема 84 пользовательского интерфейса содержит датчик или приемник 90 для приема сигналов, переданных пультом 26 дистанционного управления. В этом примере сигналы, испускаемые пультом 26 дистанционного управления, представляют собой сигналы инфракрасного света. Пульт 26 дистанционного управления аналогичен пульту дистанционного управления, описанному в публикации WO 2011/055134, содержимое которой включено в этот документ посредством ссылки. В общих чертах, пульт 26 дистанционного управления содержит несколько кнопок, которые может нажимать пользователь, и блок управления, предназначенный для генерации и передачи сигналов инфракрасного света в ответ на нажатие одной из кнопок. Сигналы инфракрасного света испускают из окошка, расположенного на одном конце пульта 26 дистанционного управления. Питание блока управления осуществляется от батареи, расположенной в батарейном отсеке пульта 26 дистанционного управления.
Схема 84 пользовательского интерфейса также содержит переключатель 92, который приводит в действие пользователь с помощью исполнительного элемента 24. В этом примере исполнительный элемент 24 выполнен в виде нажимной кнопки, у которой имеется передняя поверхность, на которую может нажать пользователь, чтобы задняя поверхность исполнительного элемента 24 вошла в контакт с переключателем 92. Передняя поверхность исполнительного элемента 24 доступна через отверстие 94, выполненное во внешнем корпусе 80 основания 22. Исполнительный элемент 24 смещен от переключателя 92, так что, когда пользователь отпускает исполнительный элемент 24, задняя поверхность исполнительного элемента 24 отодвигается от переключателя 92, чтобы прервать контакт между исполнительным элементом 24 и переключателем 92. В этом примере исполнительный элемент 24 содержит пару упругих рычагов 96. Конец каждого рычага 96 расположен рядом с соответствующей стенкой 98 рамы 88. Когда пользователь прижимает исполнительный элемент 24 к переключателю 92, контакт концов рычагов 96 и стенок 98 приводит к тому, что рычаги 96 упруго деформируются. Когда пользователь отпускает исполнительный элемент 24, рычаги 96 расслабляются, так что исполнительный элемент 24 автоматически отодвигается от переключателя 92.
Исполнительный элемент 24 также выполняет функцию передачи на приемник 90 световых сигналов, которые были переданы пультом 26 дистанционного управления, и которые попадают на переднюю поверхность исполнительного элемента 24. В этом примере исполнительный элемент 24 представляет собой один формованный компонент, который выполнен из светопроводящего материала, например, из поликарбоната. Вторая задняя поверхность исполнительного элемента 24 расположена возле приемника 90, так что часть исполнительного элемента 24, которая проходит между передней поверхностью и этой второй задней поверхностью, обеспечивает путь для переданных сигналов инфракрасного света.
Схема 84 пользовательского интерфейса также содержит дисплей 66 для отображения текущих рабочих настроек вентилятора 10 в сборе, и светодиод (светодиод) 100 (схематично показанный на фиг. 10), который включается в зависимости от текучего рабочего состояния вентилятора 20 в сборе. Дисплей 66 предпочтительно расположен непосредственно за сравнительно тонким участком корпуса 80 основания 22, так что дисплей 66 виден пользователю через корпус 80 основания 22. В этом примере светодиод 100 включается, когда вентилятор 10 в сборе находится во включенном состоянии, в котором вентилятор 10 в сборе создает воздушный поток. В этом примере исполнительный элемент 24 также устроен так, чтобы передавать свет, испускаемый светодиодом 100 на переднюю поверхность исполнительного элемента 24. Исполнительный элемент 24 может иметь третью заднюю поверхность, которая расположена возле светодиода 100, так что часть исполнительного элемента 24, которая проходит между передней поверхностью и этой третьей задней поверхностью, обеспечивает путь для световых сигналов, испускаемых светодиодом 100. Как вариант, когда светодиод 100 включен, он может быть виден пользователю через корпус 80 основания 22.
Основание 22 также содержит главную управляющую схему 64, не показанную на фиг. 3-7, но схематично изображенную на фиг. 10, соединенную со схемой 84 пользовательского интерфейса. Главная управляющая схема 64 содержит микропроцессор 102, блок 104 питания, соединенный с основным кабелем питания для подачи электроэнергии на вентилятор 10 в сборе, и схему 106 определения напряжения питания, предназначенную для определения амплитуды напряжения питания. Микропроцессор 102 управляет драйвером 62 мотора для того, чтобы мотор 60 вращал крыльчатку 56, чтобы втягивать первичный воздушный поток в вентилятора 10 в сборе через воздухозаборник 14.
Для включения вентилятора 10 в сборе пользователь либо нажимает на исполнительный элемент 24, чтобы включить переключатель 92, либо нажимает на кнопку "вкл/выкл" на пульте 26 дистанционного управления для передачи инфракрасного сигнала, который проходит через исполнительный элемент 24, чтобы его принял приемник 90 схемы 84 пользовательского интерфейса. Схема 84 пользовательского интерфейса передает это действие на главную управляющую схему 64, в ответ на это главная управляющая схема 64 включает мотор 60. Включается светодиод 100. Главная управляющая схема 64 выбирает скорость вращения мотора 60 из диапазона значений, перечисленных ниже. Каждое значение связано с соответствующей одной выбираемой пользователем установкой скорости.
Изначально, установка скорости, которая выбирается главной управляющей схемой 64, соответствует установке скорости, которая была выбрана пользователем при предыдущем включении вентилятора 10 в сборе. Например, если пользователь выбрал установку скорости 7, то мотор 60 вращается со скоростью 7600 об/мин, а на дисплее 66 отображается число "7".
Мотор 60 вращает крыльчатку 56, что приводит к тому, что первичный поток воздуха поступает в корпус 20 через воздухозаборник 14 и проходит к воздухозаборнику 52 канала 50. Воздушный поток проходит через канал 50 и направляется имеющей соответствующую форму периферийной поверхностью воздуховыпускного отверстия 54 канала 50 во внутренний канал 42 сопла 16. Во внутреннем канале 42 первичный воздушный поток разделяют на два воздушных потока, которые проходят в противоположных угловых направлениях вокруг отверстия 32 сопла 16, каждый в соответствующем участке 44, 46 внутреннего канала 42. Когда воздушные потоки проходят через внутренний канал 42, воздух выводят через воздуховыпускное отверстие 18. Выход первичного воздушного потока из воздуховыпускного отверстия 18 приводит к появлению вторичного воздушного потока, получаемого путем увлечения воздуха из внешнего окружения, в частности, из области вокруг сопла 16. Этот вторичный воздушный поток объединяется с первичным воздушным потоком, чтобы образовать объединенный, или общий, воздушный поток, или воздушное течение, выходящий из сопла 16.
Если для включения вентилятора 10 в сборе пользователь использовал пульт 26 дистанционного управления, то пользователь может изменить скорость вращения мотора 60, нажимая на пульте 26 дистанционного управления кнопку "увеличить скорость", или нажимая на пульте 26 дистанционного управления кнопку "уменьшить скорость". Если пользователь нажимает кнопку "увеличить скорость", то пульт 26 дистанционного управления передает уникальный инфракрасный сигнал, который принимает приемник 90 схемы 84 пользовательского интерфейса. Схема 84 пользовательского интерфейса сообщает о приеме этого сигнала на главную управляющую схему 64, в ответ на это главная управляющая схема 64 увеличивает скорость вращения мотора 60 до скорости, связанной со следующей более высокой установкой скорости, и дает команду схеме 84 пользовательского интерфейса отобразить эту установку скорости на дисплее 66. Если пользователь нажимает на пульте 26 дистанционного управления кнопку "уменьшить скорость", то пульт 26 дистанционного управления передает другой уникальный инфракрасный сигнал, который принимает приемник 90 схемы 84 пользовательского интерфейса. Схема 84 пользовательского интерфейса сообщает о приеме этого сигнала на главную управляющую схему 64, в ответ на это главная управляющая схема 64 уменьшает скорость вращения мотора 60 до скорости, связанной со следующей более низкой установкой скорости, и дает команду схеме 84 пользовательского интерфейса отобразить эту установку скорости на дисплее 66.
Пользователь может выключить вентилятор 10 в сборе, нажимая кнопку "вкл/выкл" на пульте 26 дистанционного управления. Пульт 26 дистанционного управления передает инфракрасный сигнал, который принимает приемник 90 схемы 84 пользовательского интерфейса. Схема 84 пользовательского интерфейса сообщает о приеме этого сигнала на главную управляющую схему 64, в ответ на что главная управляющая схема 64 отключает мотор 60 и светодиод 100. Пользователь также может выключить вентилятор 10 в сборе, прижимая исполнительный элемент 24 к переключателю 92.
Как отмечалось выше, корпус 20 может колебаться относительно основания 22 вокруг первой оси А колебания, а также наклоняться относительно основания 22 вокруг второй оси В наклона. Эти оси обозначены на фиг. 8(а). Ось А колебания по существу коллинеарна оси Z вращения крыльчатки 56, в то время как ось В наклона по существу перпендикулярна оси А колебания и осям X, Y.
Основание 22 содержит моторизованный колебательный механизм для выполнения колебаний корпуса 20 относительно основания 22 вокруг оси А колебания. Колебательный механизм содержит мотор 110, который предпочтительно выполнен в виде шагового двигателя. Мотор 110 соединен с пластиной 82 основания 22, так что мотор 110 остается неподвижным относительно основания 22 во время колебательного движения корпуса 20 относительно основания 22. Мотор 110 устроен так, чтобы приводить в движение зубчатую передачу. Зубчатая передача содержит ведущую шестерню 112, соединенную с вращающимся валом 114, выступающим из мотора 110, и ведомую шестерню 116, которую приводит в движение ведущая шестерня 112, чтобы поворачивать вокруг оси А колебания. И ведущая шестерня 112, и ведомая шестерня 116 предпочтительно выполнены в виде цилиндрического зубчатого колеса, при этом ведущая шестерня 112 поворачивается вокруг оси, которая параллельна оси А колебания, но находится от нее на некотором расстоянии. Ведущая шестерня 112 имеет набор зубьев, которые сцепляются с набором 118 зубьев, выполненных на периферийном участке ведомой шестерни 116, чтобы вращать ведомую шестерню 116 вокруг оси А колебания. В этом примере передаточное число зубчатой передачи составляет около 6.6:1. В основании 22 выполнены подшипники для поддерживания ведомой шестерни 116 для вращения относительно основания 22. Эти подшипники включают в себя нижний подшипник 120, который контактирует с валом 122 ведомой шестерни 116, и упорный подшипник 124, установленный на пластине 82 основания для поддерживания нижней поверхности (как показано) ведомой шестерни 116. Кольцевой подшипник 126 скольжения может быть установлен на верхней поверхности набора 118 зубьев, чтобы гарантировать, что ведомая шестерня 116 продолжит вращаться относительно основания 82 в случае какого-либо контакта между верхней поверхностью ведомой шестерни 116 и корпуса 80 основания 22.
Корпус 20 стойки 12 установлен на ведомой шестерне 116 для вращения вместе с ней. Ведомая шестерня 116 содержит несколько первых сцепляющихся элементов, каждый из которых взаимодействует с соответствующим вторым сцепляющимся элементом, расположенным на корпусе 20, чтобы удерживать корпус 20 на ведомой шестерне 116. Сцепляющиеся элементы также служат для того, чтобы направлять отклонение корпуса 20 относительно ведомой шестерни 116 и, таким образом, относительно основания 22, так что по существу отсутствует какое-либо вращение или поворот корпуса 20 относительно основания 22, когда он перемещается в наклонное положение или из него.
Со ссылкой на фиг. 4(а) и 4(b), каждый из первых сцепляющихся элементов проходит в направлении перемещения корпуса 20 относительно основания 22. Первые сцепляющиеся элементы соединены и предпочтительно выполнены как единое целое с вогнутой верхней поверхностью 128 ведомой шестерни 116. В этом варианте осуществления ведомая шестерня 116 содержит два сравнительно коротких внешних сцепляющихся элемента 130 и один сравнительно длинный внутренний сцепляющийся элемент 132, расположенный между внешними сцепляющимися элементами 130. Каждый из внешних сцепляющихся элементов 130 имеет Г-образное поперечное сечение. Каждый из внешних сцепляющихся элементов 130 содержит стенку 134, которая соединена с верхней поверхностью ведомой шестерни 116 и вертикально выступает от нее, и изогнутый фланец 136, который соединен с верхним концом стенки 134 и перпендикулярен ему. Внутренний сцепляющийся элемент 132 также имеет Г-образное поперечное сечение. Внутренний сцепляющийся элемент 132 содержит стенку 138, которая соединена с верхней поверхностью ведомой шестерни 116 и вертикально выступает от нее, и изогнутый фланец 140, который соединен с верхним концом стенки 138 и перпендикулярен ему. Ведомая шестерня 116 также включает в себя отверстие 142, чтобы кабель мог пройти от главной управляющей схемы 64 к мотору 60.
Корпус 20 содержит по существу цилиндрический внешний корпус 148 и выпуклую наклонную пластину 150, соединенную с нижним концом внешнего корпуса 148. Наклонная пластина 150 показана отдельно от внешнего корпуса 148 на фиг. 5(а)-5(d). Нижняя поверхность 152 наклонной пластины 150 имеет выпуклую форму и обладает такой кривизной, которая по существу совпадает с кривизной верхней поверхности 128 ведомой шестерни 116. Наклонная пластина 150 содержит несколько вторых сцепляющихся элементов, каждый из которых удерживается соответствующим первым сцепляющимся элементом ведомой шестерни 116, чтобы соединить корпус 20 с ведомой шестерней 116. Наклонная пластина 150 содержит несколько параллельных канавок, которые задают несколько изогнутых направляющих наклонной пластины 150. Канавки задают пару внешних направляющих 154 и внутреннюю направляющую 156, и эти направляющие 154, 156 образуют вторые сцепляющиеся элементы корпуса 20. Каждая из внешних направляющих 154 содержит фланец 158, который проходит в соответствующую канавку наклонной пластины 150, и который имеет кривизну, которая по существу совпадает с кривизной фланцев 136 ведомой шестерни 116. Внутренняя направляющая 156 содержит фланец 160, который проходит в соответствующую канавку наклонной пластины 150 и имеет кривизну, которая по существу совпадает с кривизной фланца 140 ведомой шестерни 116. Отверстие 162, выполненное в наклонной пластине 150, позволяет кабелю проходить через наклонную пластину 150 к мотору 60.
Стойка 12 может быть устроена так, что корпус 20 можно вручную перемещать относительно основания 22 вокруг оси В наклона. В этом случае, чтобы соединить корпус 20 с ведомой шестерней 116, наклонную пластину 150 переворачивают из положения, показанного на фиг. 5(а). Кабель подают через отверстия 142, 162, а затем наклонную пластину 150 надвигают на ведомую шестерню 116, так что фланец 158 каждой внешней направляющей 128 располагается под соответствующим фланцем 136 ведомой шестерни 116, и так что фланец 160 внутренней направляющей 156 располагается под фланцем 140 ведомой шестерни 116, как показано на фиг. 7(b). Когда наклонная пластина 150 расположена в центре на ведомой шестерне 116, внешнюю оболочку 148 корпуса 20 опускают на наклонную пластину 150. Затем, корпус 20 и основание 22 переворачивают, и корпус 20 наклоняют относительно ведомой шестерни 116, чтобы открыть первые несколько отверстий 164, расположенных на наклонной пластине 150. Каждое из этих отверстий 164 выровнено с соответствующим трубчатым выступом 165 (указанным на фиг. 7(b)) на внешней оболочке 148 корпуса 20. Самонарезной винт ввинчивают в каждое из этих отверстий 164 так, чтобы он вошел в расположенный там выступ 165, тем самым, частично соединяя наклонную пластину 150 с внешней оболочкой 148. Затем, корпус 20 наклоняют в обратном направлении, чтобы открыть вторые несколько отверстий 166, расположенных на наклонной пластине 150. Каждое из этих отверстий 166 также выровнено с трубчатым выступом 167 (один из которых показан на фиг. 7(а) и фиг. 7(с)) на внешней оболочке 148 корпуса 20. Самонарезной винт ввинчивают в каждое из этих отверстий 166 так, чтобы он вошел в расположенный там выступ 167, чтобы завершить соединение наклонной пластины 150 с внешней оболочкой 148.
Главная управляющая схема 64 содержит схему 170 управления колебательным мотором, предназначенную для управления мотором 110 колебательного механизма. Работой колебательного механизма управляет главная управляющая схема 64 при приеме соответствующего управляющего сигнала от пульта 26 дистанционного управления. Главная управляющая схема 64 может быть выполнена с возможностью управлять мотором 110, чтобы выполнять колебания корпусом 20 относительно основания 22 в соответствии с одним или несколькими шаблонами колебаний, которые могут быть выбраны пользователем путем нажатия соответствующей кнопки на пульте 26 дистанционного управления. В этих шаблонах колебаний мотор 110 приводят в движение попеременно в прямом и обратном направлении, чтобы корпус 20 колебался относительно основания 22. Мотор 110 может управляться так, чтобы в течение цикла колебания поворачивать корпус 20 либо с заданной скоростью, либо с переменной скоростью. Например, корпус 20 может совершать колебания относительно основания со скоростью, которая меняется синусоидально в течение цикла колебаний. Как вариант или в дополнение, скорость колебания может изменяться в течение цикла колебаний с помощью пульта 26 дистанционного управления. В течение каждого колебательного цикла корпус 20 может поворачиваться вокруг оси А колебания на угол в диапазоне от 0 до 360°, предпочтительно на угол в диапазоне от 60 до 240°. Каждый цикл колебаний может иметь соответствующий отличный от других угол колебаний, например, 90°, 120° и 180°. Например, в шаблоне колебаний, показанном на фиг. 9(а)-9(с), главная управляющая схема 64 устроена так, чтобы корпус 20 выполнял колебания относительно основания 22 на угол около 90° и выполнял примерно от 3 до 5 циклов колебаний в минуту.
Как отмечалось выше, стойка 12 может быть устроена так, что корпус 20 можно вручную перемещать относительно основания 22 вокруг оси В наклона. Тем не менее, в показанном варианте осуществления стойка 12 содержит моторизованный приводной механизм для управления перемещением корпуса 20 относительно основания 22 вокруг оси В наклона. Приводной механизм содержит мотор 172, который предпочтительно выполнен в виде шагового двигателя. Мотор 172 соединен с корпусом 20, так что мотор 172 остается неподвижным относительно корпуса 20 во время наклона корпуса 20 относительно основания 22. В этом варианте осуществления мотор 172 установлен на наклонную пластину 150. Мотор 172 соединен с опорой 174 мотора, которая присоединена к верхней поверхности наклонной пластины 150 и предпочтительно выполнена с ней как единое целое. Мотор 172 устроен так, чтобы приводить в движение ведущую шестерню 176, которая соединена с вращающимся валом 178, выступающим из мотора 172. Ведущая шестерня 176 предпочтительно выполнена в виде цилиндрического зубчатого колеса, которое с помощью мотора 172 поворачивается вокруг оси, параллельной оси В наклона, но находится от нее на некотором расстоянии.
Ведущая шестерня 176 устроена так, чтобы сцепляться с ведомой шестерней 116 моторизованного колебательного механизма. В наклонной пластине 150 выполнено отверстие 180, через которое выступает ведущая шестерня 176, чтобы сцепляться с ведомой шестерней 116. Ведущая шестерня 176 сцепляется с ведомой шестерней 116 колебательного механизма так, что мотор 172 и ведущая шестерня 176 движутся относительно ведомой шестерни 116 вокруг оси В наклона при включении приводного механизма, заставляя корпус 20 перемещаться относительно основания 22 вокруг оси В наклона. Ведомая шестерня 116 содержит набор 182 зубьев для сцепления с зубьями ведущей шестерни 176. Этот второй набор 182 зубьев расположен на центральном участке верхней поверхности ведомой шестерни 116 и проходит вокруг оси В наклона. Второй набор 182 зубьев выровнен так, что зацепление с вращающейся ведущей шестерней 176 по существу не приводит к движению ведомой шестерни 116 вокруг оси А колебания, и так что крутящий момент передается ведомой шестерней 116 на ведущую шестерню 176, заставляя мотор 172 и ведущую шестерню 176 перемещаться относительно ведомой шестерни 116 вокруг оси В наклона. Таким образом, ведомая шестерня 116 колебательного механизма обеспечивает часть зубчатой передачи приводного механизма. В этом примере передаточное число зубчатой передачи приводного механизма составляет около 11.7:1.
Главная управляющая схема 64 содержит управляющую схему 184 приводного мотора для управления мотором 172 приводного механизма, так что кабель проходит от главной управляющей схемы 64, расположенной в основании 22, к мотору 172, расположенному в корпусе 20. Кабель также проходит через отверстия 142, 162, выполненные в ведомой шестерне 116 и наклонной пластине 150. При сборке мотор 172 и ведущую шестерню 176 соединяют с наклонной пластиной 150 до того, как соединить наклонную пластину 150 с ведомой шестерней 116. Работой приводного механизма управляет главная управляющая схема 64 при приеме соответствующего управляющего сигнала от пульта 26 дистанционного управления. Например, на пульте 26 дистанционного управления могут иметься кнопки для направления мотора 172 в противоположных направлениях, чтобы корпус 20 перемещался из ненаклонного положения относительно основания 22, как показано на фиг. 8(а), в выбранное первое полностью отклоненное положение относительно основания, как показано на фиг. 8(b), или во второе полностью отклоненное положение относительно основания, как показано на фиг. 8(с), а затем последовательно в любое положение между этими двумя полностью отклоненными положениями.
Корпус может поворачиваться вокруг оси наклона на угол в диапазоне от -20 до 20°, предпочтительно на угол в диапазоне от -10 до 10°.
Главная управляющая схема 64 может быть выполнена с возможностью управлять мотором 172, чтобы наклонять корпус 20 относительно основания 22 в соответствии с одним или несколькими шаблонами отклонения, которые могут быть выбраны пользователем путем нажатия соответствующей кнопки на пульте 26 дистанционного управления. В этих шаблонах отклонения мотор 110 приводят в движение попеременно в прямом и обратном направлении, чтобы корпус 20 колебался относительно основания 22 вокруг оси В наклона и между этими двумя полностью отклоненными положениями. Мотор 172 может управляться так, чтобы в течение такого цикла отклонения наклонять корпус 20 либо с заданной скоростью, либо с переменной скоростью.
Главная управляющая схема 64 может быть выполнена с возможностью одновременно задействовать моторы 110, 172, чтобы способствовать распространению воздушного потока, создаваемого вентилятором в сборе, по комнате или другому жилому помещению. Этот рабочий режим вентилятора 10 в сборе может быть включен пользователем путем нажатия на специальную кнопку на пульте 26 дистанционного управления. Главная управляющая схема 64 может быть устроена так, чтобы сохранять несколько предварительно заданных шаблонов перемещения корпуса 20 относительно основания 22, а пользователь может выбрать один из этих шаблонов, используя пульт 26 дистанционного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЯТОР В СБОРЕ | 2014 |
|
RU2674800C2 |
| ВЕНТИЛЯТОР В СБОРЕ | 2014 |
|
RU2659947C2 |
| ВЕНТИЛЯТОР В СБОРЕ | 2012 |
|
RU2566843C1 |
| БЕЗЛОПАСТНОЙ ПОЛОЧНЫЙ ВЕНТИЛЯТОР | 2011 |
|
RU2581117C2 |
| ВЕНТИЛЯТОР В СБОРЕ | 2014 |
|
RU2684043C2 |
| ВЕНТИЛЯТОР | 2013 |
|
RU2597737C2 |
| ВЕНТИЛЯТОР В СБОРЕ | 2014 |
|
RU2672433C2 |
| ВЕНТИЛЯТОР | 2013 |
|
RU2642002C1 |
| ВЕНТИЛЯТОР | 2013 |
|
RU2636302C2 |
| ВЕНТИЛЯТОР В СБОРЕ, СОДЕРЖАЩИЙ КОЛЬЦЕВОЕ СОПЛО И ПОТОЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2011 |
|
RU2575208C2 |





Вентилятор в сборе включает в себя основание и корпус, который включает в себя воздухозаборник, крыльчатку и мотор для вращения крыльчатки. Вентилятор в сборе также включает в себя воздуховыпускное отверстие и внутренний канал, который проходит вокруг отверстия. Моторизованный колебательный механизм, содержащийся в основании, обеспечивает колебания корпуса относительно основания вокруг оси колебания. Моторизованный колебательный механизм включает в себя второй мотор, приводной элемент, приводимый в действие вторым мотором, и ведомый элемент, который приводится в действие приводным элементом. Приводной элемент соединен с основанием для вращения относительно него, а корпус установлен на ведомом элементе, чтобы поворачиваться вместе с ним. Сцепляющиеся элементы удерживают корпус на ведомом элементе. 2 н. и 13 з.п. ф-лы, 10 ил.
1. Стойка для вентилятора в сборе, содержащая:
основание, содержащее пользовательский интерфейс для управления работой вентилятора в сборе;
корпус, установленный на основании, при этом корпус содержит по меньшей мере один воздухозаборник, крыльчатку, мотор для вращения крыльчатки, чтобы затягивать воздушный поток через упомянутый по меньшей мере один воздухозаборник, и воздуховыпускное отверстие;
первый моторизованный приводной механизм для обеспечения колебаний корпуса относительно основания вокруг первой оси; и
второй моторизованный приводной механизм для перемещения корпуса относительно основания вокруг второй оси, отличной от первой оси, между ненаклонным положением и наклонным положением.
2. Стойка по п. 1, в которой приводные механизмы содержат общий элемент, предназначенный для передачи на корпус первого крутящего момента, перемещающего корпус вокруг первой оси, и второго крутящего момента, перемещающего корпус вокруг второй оси.
3. Стойка по п. 2, в которой общий элемент содержит зубчатое колесо.
4. Стойка по п. 2, в которой общий элемент представляет собой ведомый элемент первого приводного механизма.
5. Стойка по п. 2, в которой корпус установлен на общем элементе.
6. Стойка по п. 2, в которой каждый из приводных механизмов содержит соответствующий мотор для приведения в движение соответствующего приводного элемента для сцепления с общим элементом приводных механизмов.
7. Стойка по п. 6, в которой мотор и приводной элемент первого приводного механизма соединены с основанием.
8. Стойка по п. 6, в которой мотор и приводной элемент второго приводного механизма соединены с корпусом.
9. Стойка по п. 6, в которой каждый из приводных элементов выполнен с возможностью сцепления с соответствующим участком общего элемента.
10. Стойка по п. 9, в которой приводной элемент первого приводного механизма выполнен с возможностью сцепления с периферийным участком общего элемента, а приводной элемент второго приводного механизма выполнен с возможностью сцепления с центральным участком общего элемента.
11. Стойка по п. 10, в которой каждый участок общего элемента содержит соответствующий набор зубьев.
12. Стойка по п. 11, в которой наборы зубьев устроены так, что во время работы первого приводного механизма сцепление приводного элемента первого приводного механизма и общего элемента приводит к вращению общего элемента вокруг первой оси, в то время как при работе второго приводного механизма сцепление приводного элемента второго приводного механизма и общего элемента приводит к перемещению мотора и приводного элемента второго приводного механизма вокруг второй оси.
13. Стойка по п. 11, в которой каждый набор зубьев проходит вокруг соответствующей первой или второй оси.
14. Стойка по п. 1, в которой первая ось, по существу, перпендикулярна второй оси.
15. Вентилятор в сборе, содержащий основание, содержащее пользовательский интерфейс для управления работой вентилятора в сборе; корпус, установленный на основании, причем корпус содержит по меньшей мере один воздухозаборник, крыльчатку, мотор для приведения в действие крыльчатки, чтобы втягивать поток воздуха через упомянутый по меньшей мере один воздухозаборник; по меньшей мере одно воздуховыпускное отверстие; внутренний канал для подачи воздуха к упомянутому по меньшей мере одному воздуховыпускному отверстию, причем внутренний канал проходит вокруг отверстия, через которое воздух снаружи вентилятора в сборе втягивается воздухом, испускаемым из упомянутого по меньшей мере одного воздуховыпускного отверстия; первый моторизованный приводной механизм для обеспечения колебаний корпуса относительно основания вокруг первой оси и второй моторизованный приводной механизм для перемещения корпуса относительно основания вокруг второй оси, отличной от первой оси, между ненаклонным положением и наклонным положением.
| WO 2010100451 A1, 10.09.2010 | |||
| WO 2012052736 A1, 26.04.2012 | |||
| ВЕНТИЛЯТОР | 2008 |
|
RU2458255C2 |
| Бытовой вентилятор | 1990 |
|
SU1793107A1 |

