Область техники, к которой относится изобретение
Настоящее изобретение относится к системам привода для вращения одного или более колес шасси воздушного судна для целей руления по летному полю и/или для раскрутки перед посадкой.
Уровень техники
От воздушного судна требуется руление между объектами летного поля. Например, руление между взлетно-посадочной полосой и объектом (например, воротами терминала), через которые производят посадку пассажиров на воздушное судно или высадку из него. Обычно подобное руление осуществляют за счет тяги двигателей воздушного судна, которая перемещает воздушное судно вперед, что заставляет вращаться колеса шасси. Поскольку скорость руления по летному полю должна быть относительно низкой, двигатели должны работать в режиме весьма малой мощности. Это означает, что перемещение происходит при относительно высоком расходе топлива и, следовательно, с низким коэффициентом тяги при столь малой мощности. Это приводит к повышению уровней как атмосферного, так и шумового загрязнения местной среды вокруг аэропортов. Более того, даже при работе двигателей в режиме малой мощности обычно возникает необходимость в использовании системы торможения колес для того, чтобы ограничить скорость руления по летному полю, что приводит к высокой степени износа тормозов колес.
Задний ход пассажирского воздушного судна, например, перемещение от ворот терминала с использованием его главных двигателей не допускается. При необходимости движения задним ходом или в иных ситуациях, когда руление по летному полю посредством главных двигателей практически нецелесообразно, для обеспечения маневра воздушного судна используют автомобили-тягачи. Эта операция трудоемка и дорогостояща. По этой причине имеется необходимость в некоей системе привода, воздействующей на колеса шасси воздушного судна при его рулении по летному полю. Существует также потребность в использовании подобной системы привода для раскрутки колес перед посадкой, и/или в приложении крутящего момента при торможении к вращающимся колесам, с преобразованием кинетической энергии в электрическую энергию, посредством использования системы приводного мотора в качестве генератора.
В последнее время были предложены несколько систем автономного руления по летному полю, способных осуществлять как вращение колес при нахождении воздушного судна на земле, так и раскручивание их перед посадкой. Заявка US 2006/0065779 описывает один из примеров, в котором предлагается механизированная система привода колеса носового шасси воздушного судна с муфтой сцепления, переключающей режим работы колеса со свободным вращением, на режим, в котором колесо приводится во вращение мотором. Указанная муфта сцепления может также переключать мотор на раскрутку колеса перед посадкой.
В публикации заявки WO 2011/023505 описана одна известная конструкция, которая не ограничивается носовым шасси. В описываемой системе используется исполнительный механизм, который перемещает ведущую шестерню в состояние зацепления и выхода из зацепления с ведомой шестерней, насаженной на ступице колеса. Публикация заявки WO 2014/023939 описывает еще одну известную конструкцию, во многих отношениях аналогичную той, которая описана в публикации заявки WO 2011/023505, в которой одна из ведущих шестерен и ведомая шестерня содержат цепную шестерню, а другая из ведущих шестерен и ведомая шестерня содержит серию роликов, располагающихся по окружности, причем каждый ролик способен вращаться вокруг оси ролика на определенном расстоянии от оси вращения ведущей шестерни или ведомой шестерни, соответственно.
Раскрытие изобретения
Первая цель настоящего изобретения предусматривает систему привода, для вращения колеса шасси воздушного судна, причем указанная система привода включает в себя мотор, вращающий ведущую шестерню, и ведомую шестерню, предназначенную для установки на колесе, указанная система привода имеет первую конфигурацию, в которой ведущая шестерня способна входить в зубчатое зацепление с ведомой шестерней, благодаря чему мотор вращает ведомую шестерню, и вторую конфигурацию, в которой ведущая шестерня не способна входить в зацепление с ведомой шестерней, и указанная система привода, кроме того, содержит линейный позиционный исполнительный механизм для вращения ведущей шестерни относительно ведомой шестерни, в этой системе привода позиционный исполнительный механизм имеет первый конец и второй конец, причем первый конец шарнирно соединен с осью центровой опоры, которая закреплена на определенном расстоянии от оси вращения ведомой шестерни, а второй конец, шарнирно соединен с осью центровой опоры, которая закреплена на определенном расстоянии от оси вращения ведущей шестерни.
Термин «колесо» шасси воздушного судна используется в настоящем документе в своем общепринятом значении, в котором в виду имеется колесо, находящееся в контакте с поверхностью летного поля, когда воздушное судно покоится на земле, а не находится в воздухе. Термин «мотор» используется в настоящем документе в своем общепринятом значении, в котором в виду имеется механизм, посредством которого некий источник энергии (например, электрической, гидравлической и т.д.) используют для обеспечения перемещения. Следует понимать, что указанный мотор может функционировать в качестве мотора-генератора, посредством которого механическую энергию преобразуют в электрическую энергию. Термины «ведущий» и «ведомый» используются в настоящем документе в значении «ведущая шестерня и «ведомая шестерня» при толковании явления передачи мощности от работающего мотора для вращения колеса шасси воздушного судна. Разумеется, следует принимать во внимание, что в том случае, когда мотор функционирует в качестве мотора-генератора и используется как генератор, работающий от «ведомой шестерни», он фактически превращается в элемент привода, приводящего в движение «ведущую шестерню» или, иными словами, в генератор. Указанный генератор функционирует, когда к нему приложена энергия от крутящего момента, образующегося при торможении колеса.
Позиционный исполнительный механизм может включать в себя гидравлический цилиндр.
Указанный гидроцилиндр может быть гидроцилиндром двустороннего действия.
В качестве варианта гидроцилиндр может быть односторонним. Например, гидроцилиндр может иметь участок кольцевого сечения на одном конце штока и цилиндрический участок на другом конце штока, причем цилиндрический участок не находится под давлением. Указанный участок, не находящийся под давлением, может соединяться с атмосферой через газопроницаемую мембрану, непроницаемую для жидкости.
В качестве варианта гидроцилиндр может иметь первый и второй элемент, образующие два кольцевых объема между первым и вторым элементом, причем указанные два кольцевых объема гидравлически связаны в единую гидравлическую камеру. Указанные два кольцевых объема могут иметь площади, отличные друг от друга.
Позиционный исполнительный механизм может быть самозапирающим исполнительным механизмом. Указанный самозапирающий исполнительный механизм может устанавливаться для блокировки системы привода во второй конфигурации.
Система привода может также содержать запирающее устройство, расположенное вне позиционного исполнительного механизма для блокировки системы привода во второй конфигурации.
Для высвобождения запирающего устройства может быть установлен размыкающий исполнительный механизм, при этом на позиционный исполнительный механизм поступает команда переместить ведущую шестерню из второй конфигурации в первую конфигурацию. Размыкающий исполнительный механизм может включать в себя гидравлический цилиндр.
В том случае, когда размыкающий исполнительный механизм и позиционный исполнительный механизм оба являются гидравлическими устройствами, их можно присоединить к общей гидравлической сети.
Запирающее устройство может содержать в себе механический запирающий рычаг.
Запирающее устройство может содержать в себе крюк, шарнирно посаженный на шасси воздушного судна, и палец, находящийся на определенном расстоянии от оси вращения ведущей шестерни, причем в указанном запирающем устройстве крюк перемещается между запертым положением, в котором палец удерживается крюком, и отпертым положением, в котором указанный палец перемещается относительно крюка.
Запирающее устройство может, кроме того, содержать щеколду, которая перемещается при переходе от запертого к опертому положению, причем указанная щеколда в отпертом положении допускает вращательное перемещение крюка.
Размыкающий исполнительный механизм может быть сцеплен со щеколдой для отсоединения щеколды от крюка.
Позиционный исполнительный механизм может иметь обратный ход.
Система привода может, кроме того, содержать смещающий элемент для перевода системы привода во вторую конфигурацию. Смещающий элемент может включать в себя, по меньшей мере, одну пружину, например, скручивающую пружину, пластинчатую пружину, пружину сжатия и т.п. В случае применения пружины сжатия можно установить направляющую, которая удерживала бы пружину от потери устойчивости при сжатии.
Одна из ведущих шестерен и ведомая шестерня могут содержать цепную шестерню, а другая из ведущих шестерен и ведомых шестерен могут содержать комплект роликов, размещенных по окружности, причем каждый ролик может вращаться вокруг собственной оси на фиксированном расстоянии от оси вращения ведущей шестерни или ведомой шестерни, соответственно.
Колесо может быть приведено во вращение для руления воздушного судна по летному полю и/или колесо может быть раскручено перед посадкой.
Мотор может быть мотором/генератором, который при работе в качестве генератора оказывается в конфигурации использования крутящего момента при торможении колеса.
Ведомая шестерня может быть приспособлена для установки на ступице колеса, например на внешнем ободе ступицы.
Другая цель настоящего изобретения предусматривает установку описанной системы привода на шасси воздушного судна.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны со ссылкой на прилагаемые чертежи, в которых:
Фиг. 1 изображает вид спереди воздушного судна с системой привода;
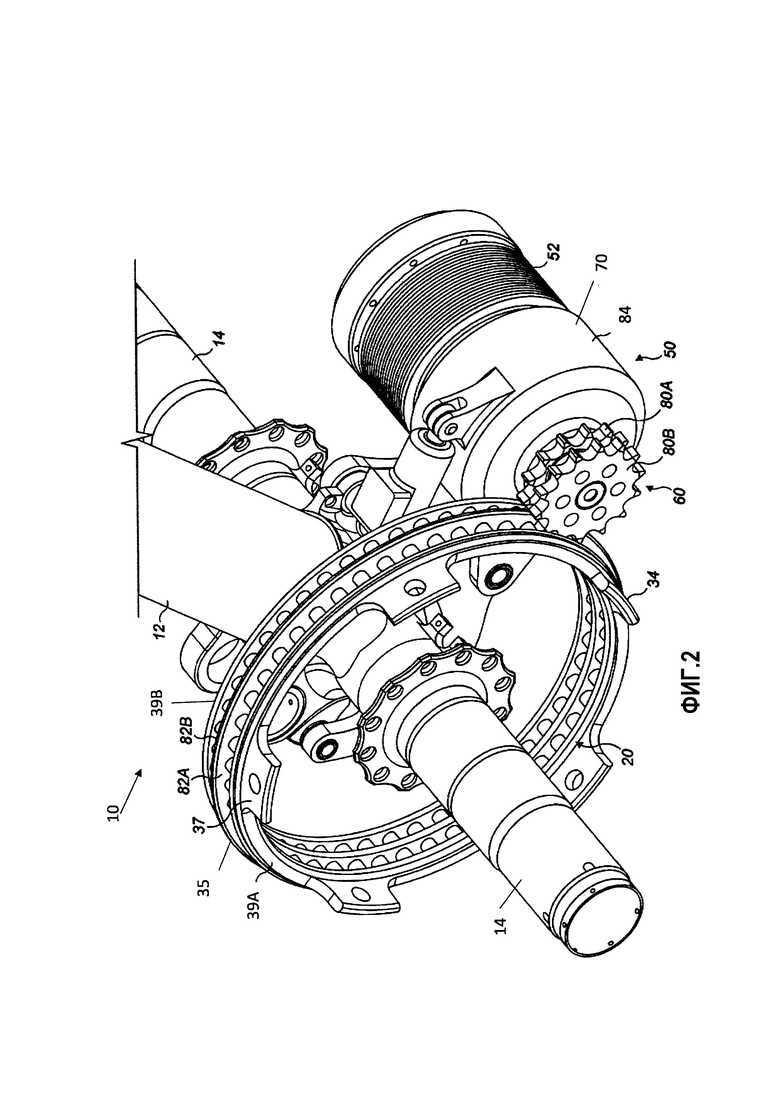
Фиг. 2 показывает изометрический вид системы привода по одному из вариантов осуществления;
Фиг. 3 показывает вид сбоку на систему привода, изображенную на фиг. 2 в состоянии зацепления;
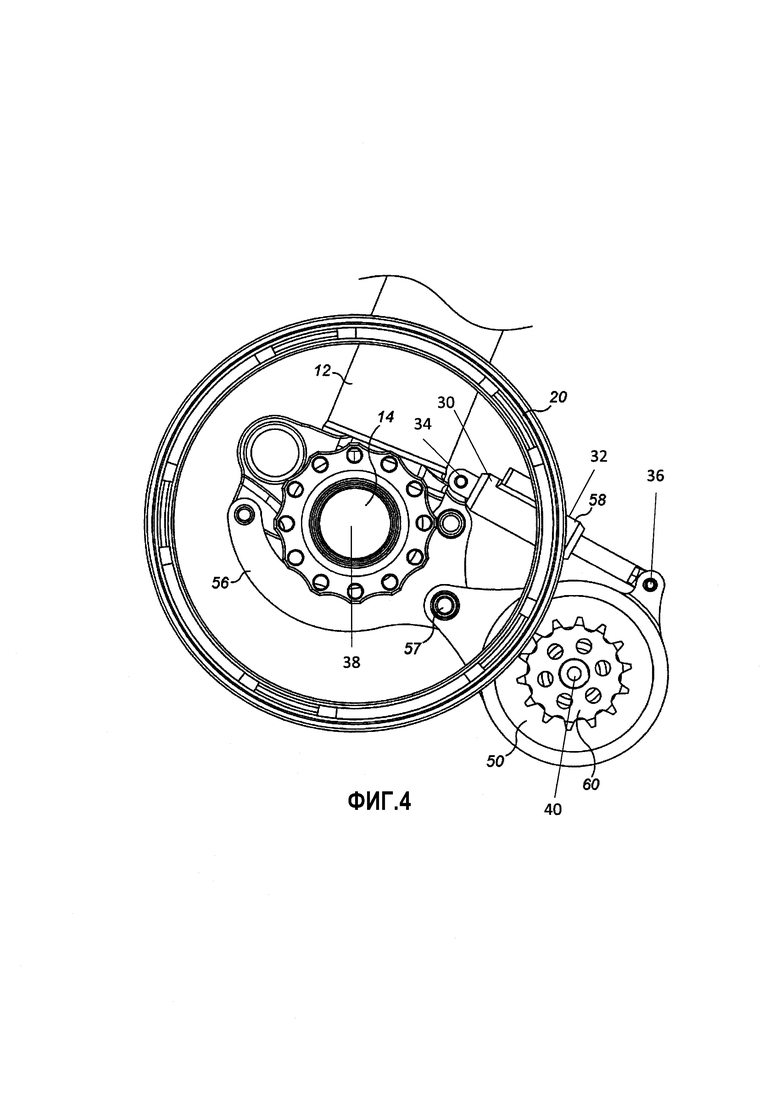
Фиг. 4 показывает вид сбоку на систему привода, изображенную на фиг. 2 в отсоединенном состоянии;
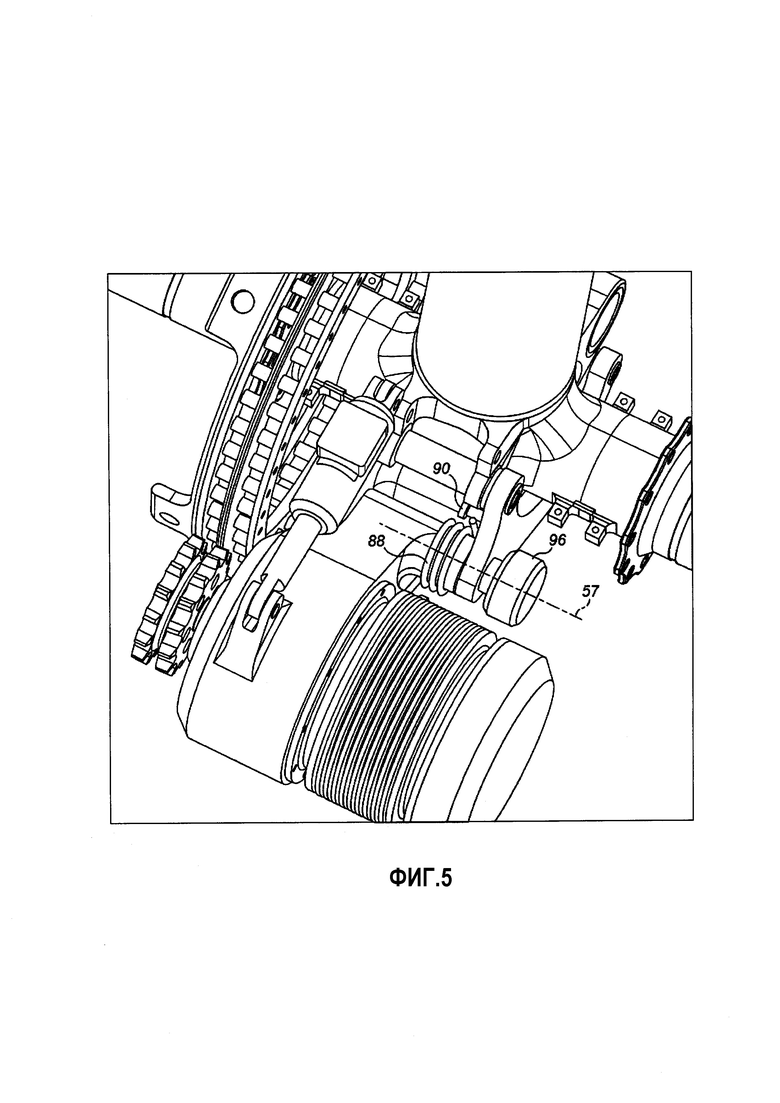
Фиг. 5 показывает изометрический вид сверху на систему привода, изображенную на фиг. 2;
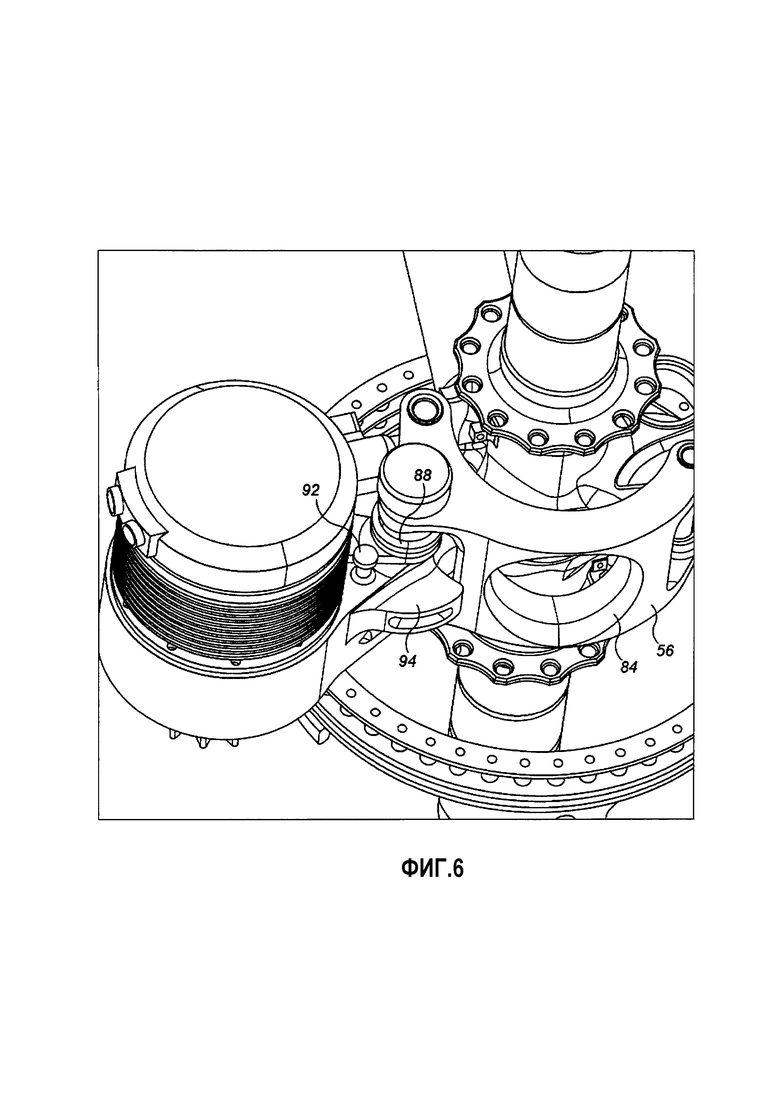
Фиг. 6 показывает изометрический вид снизу на систему привода, изображенную на фиг. 2;
Фиг. 7 показывает изометрический вид другого варианта осуществления системы привода;
Фиг. 8 показывает вид сбоку еще одного варианта осуществления системы привода;
Фиг. 9 показывает вид сбоку следующего варианта осуществления системы привода;
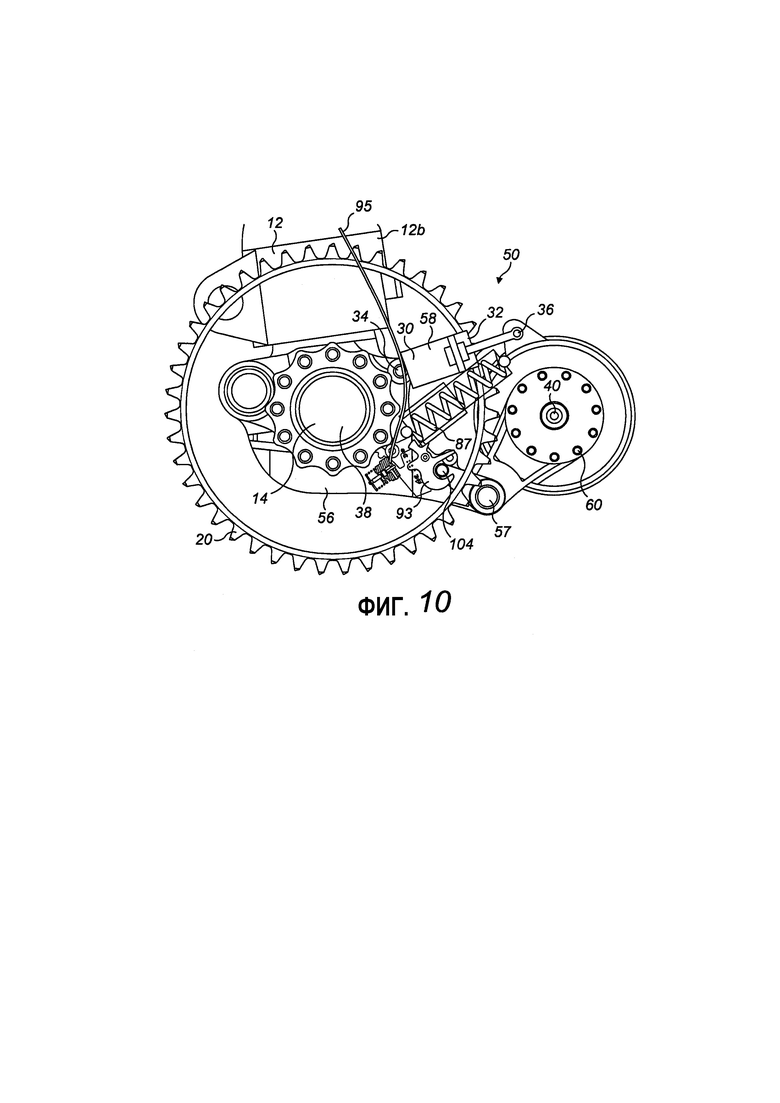
Фиг. 10 показывает вид сбоку еще одного следующего варианта осуществления системы привода;
Фиг. 11 показывает вид сбоку внешнего запирающего устройства системы привода, изображенной на фиг. 10 в отсоединенном состоянии;
Фиг. 12 показывает вид сбоку внешнего запирающего устройства системы привода, изображенной на фиг. 10 в состоянии зацепления;
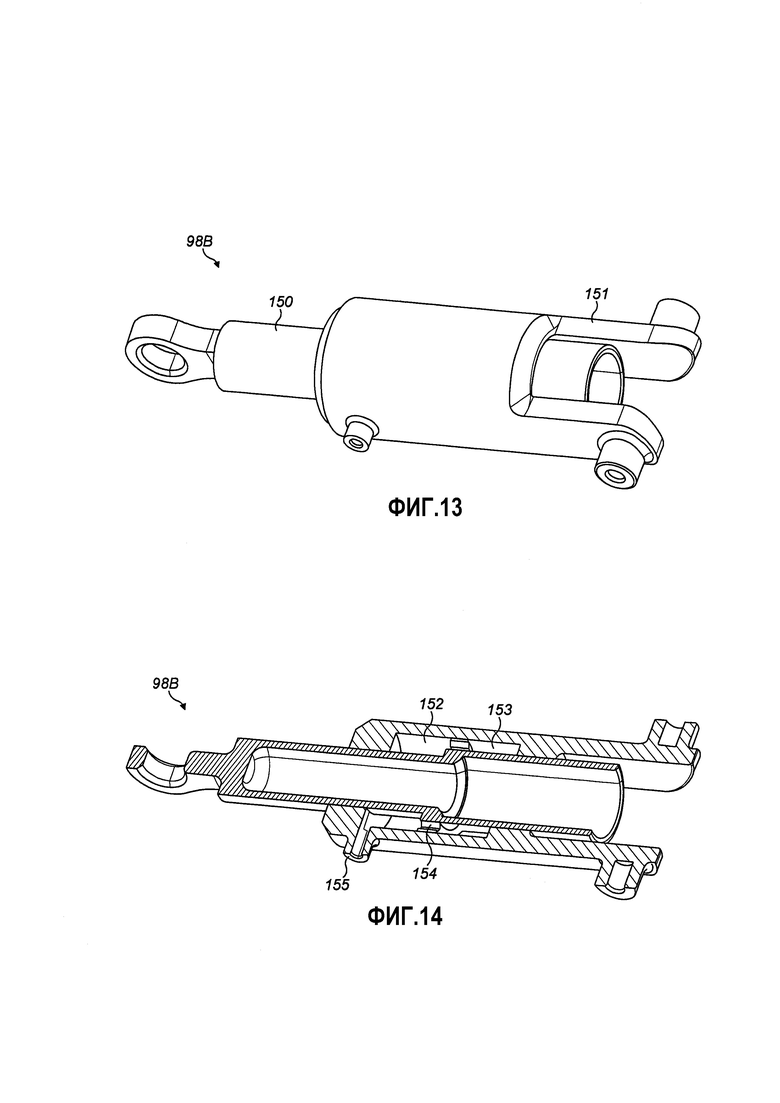
Фиг. 13 показывает изометрический вид альтернативного гидравлического позиционного исполнительного механизма одностороннего действия для системы привода; и
Фиг. 14 показывает изометрический вид позиционного исполнительно механизма, изображенного на фиг. 13 в частичном разрезе.
Осуществление изобретения
Первый вариант осуществления настоящего изобретения изображен на фигурах с 1 по 6. Как видно из фиг. 1, у воздушного судна 1 имеются левое и правое шасси 2, 3 и носовое шасси 4. Каждое шасси состоит из двух колес (конфигурация "diabolo"), однако принципы указанного варианта осуществления могут быть применены к шасси с любым количеством колес: одиночное колесо или четыре колеса, или большее число колес.
Система привода шасси предназначена для привода главных шасси (т.е. шасси, прикрепленных к конструкции крыльев или к конструкции фюзеляжа вблизи расположения крыльев), поскольку считают, что вес, приходящийся на главные шасси, обеспечивает лучшую силу сцепления между колесами и покрытием летного поля и надежное руление воздушного судна по летному полю. Однако систему привода можно как вариант применять к носовому шасси (т.е. к рулевому шасси, находящемуся на носу воздушного судна). Показанные на фигуре главные шасси используют на воздушных судах с одним проходом в салоне пассажирского авиалайнера (приблизительно на 15-200 пассажиров), хотя следует иметь в виду, что настоящее изобретение имеет широкое применение для разнообразных типов воздушных судов и различного веса, включая гражданские воздушные суда, военные воздушные суда, вертолеты, пассажирские воздушные суда (вместимостью менее 50, 100-150, 150-250, 250-450 и более 450 пассажиров), транспортные, воздушные суда с поворотными винтами и т.п. В последующих фигурах шасси, оснащенные системой привода, обозначены, как правило, цифрой 10.
Шасси 10, изображенное на фиг. 2, включает в себя телескопическую амортизирующую главную стойку 12, включающую в себя верхнюю телескопическую часть 12а (главная принадлежность) и нижнюю телескопическую часть 12b (ползун). Верхняя телескопическая часть 12а своим верхним концом прикреплена к крылу 5 воздушного судна. В других вариантах осуществления верхняя телескопическая часть может быть прикреплена к фюзеляжу 6 воздушного судна или к крылу и фюзеляжу. Нижняя телескопическая часть 12b поддерживает ось 14, на которой находятся два колеса 16 (для ясности на фиг. 2 не показаны), по одному с каждой стороны главной стойки. Колеса 16 вращаются на оси 14, обеспечивая возможность перемещения воздушного судна по летному полю, например, при рулении или посадке.
Каждое колесо 16 содержит шину 17, поддерживаемую ступицей 18. Каждая ступица 18 колеса имеет обод 19 для удержания шины. Система привода 50 колеса шасси включает в себя ведомую шестерню 20, прикрепленную к ступице 18 таким образом, что она может вращаться совместно с колесом 16. На изображенном примере осуществления ведомая шестерня 20 содержит роликовую шестерню 34, выполненную на кольцевом круге 35, и комплект пальцев (не показаны), выступающих по обе стороны от кольцевого круга 35. На одной стороне кольцевого круга 35 расположен первый комплект вращающихся на пальцах роликов 82А, а на второй стороне кольцевого круга расположен второй комплект вращающихся на пальцах роликов 82В. Каждый комплект роликов 82А, 82В цепочкой размещен по окружности кольцевого круга, образуя замкнутую дорожку. Первый и второй поперечные кольцевые круги 39А, 39В прикрывают с наружной стороны комплекты роликов 82А, 82В. Пальцы, на которых вращается первый комплект роликов 82А, простираются между кольцевым кругом 35 и первым поперечным кольцевым кругом 39А, а пальцы, на которых вращается второй комплект роликов 82В, простираются между кольцевым кругом 35 и вторым поперечным кольцевым кругом 39В. Таким образом, кольцевой круг 35 образует центральный хребет, который поддерживает пальцы, выступающие консольно из центрального хребта.
Первый поперечный кольцевой круг 39А содержит определенное количество соединительных выступающих лапок 37, которые обеспечивают жесткое соединение со ступицей 18. Как вариант, реборда, образующая непрерывный выступающий обод с вырезами или без вырезов, выходящий наружу в осевом направлении из внутреннего диаметра кольцевого круга 39А, может быть использована для создания жесткого соединения со ступицей 18. Плоскость контакта ведомой шестерни со ступицей может быть жестким соединением, или как вариант может включать в себя гибкое соединение, например, в виде резиновой втулки, допускающей некоторые угловые смещения ведомой шестерни относительно ступицы колеса, для того, чтобы компенсировать деформации конструкции шасси и изолировать ведомую шестерню от нагрузок, деформирующих колесо.
Система привода 50, кроме того, содержит мотор 52, предназначенный для вращения ведущей шестерни 60 через редуктор 70. В изображенном варианте осуществления ведущая шестерня 60 является цепной шестерней колесного типа, содержащей некоторое количество соосных цепных шестерен 80А, 80В, каждая из которых имеет зубья в радиальном направлении. Соответствующие соосные цепные шестерни 80А, 80В ведущей шестерни 60 способны входить в зацепление с соосными окружностями роликов 82А, 82В ведомой шестерни 20. Канавка между цепными шестернями 80А, 80В может находиться в контакте качения с наружным диаметром центрального хребта (кольцевой круг 35) роликовой шестерни 34. Предпочтительно, чтобы контакт качения осуществлялся по радиусу делительной окружности роликов.
В изображенном варианте осуществления система привода 50 обеспечивает привод только одному из колес 16 на каждом шасси 10. Однако предполагается, что одна система привода 50 может, как вариант, предоставляться для каждого колеса 16. Для шасси с четырьмя или более колес 16 может быть устроена система привода 50 для каждого колеса 16 или только для двух из них. В вариантах осуществления, в которых только два колеса 16 оснащают системами привода 50, может возникнуть необходимость устанавливать дополнительные моторы (не показаны) для осуществления предпосадочной раскрутки колес, не имеющих привода, и при осуществлении руления по летному полю посредством двух систем привода 50. В других вариантах осуществления возможно установить один мотор 52, обслуживающий две системы привода 50. Иными словами мотор 52 может вращать входной вал 54 каждой системы привода через дифференциал, что даст возможность вращать колеса на различных скоростях тогда, когда воздушное судно делает поворот, находясь на летном поле.
На изображенном варианте осуществления редуктор 70 является планетарным понижающим редуктором, который обеспечивает силовой поток между мотором 52 и приводной шестерней 60. Мотор является электромотором, который приводит входной вал силового потока. Выходной вал (или ведущий вал) силового потока сосен с входным валом и также соосен с осью вращения мотора. Ведущая шестерня 60 установлена на выходном валу.
Система привода 50 прикреплена к кронштейну 56, как это видно из фиг. 3, который жестко соединен с основанием ползуна 12b и шарнирно соединен с мотором 52 через ось центровой опоры 57. Установочный кронштейн 56 внизу простирается до оси 14 и прикреплен монтажными пальцами к соответственным задней и передней монтажным точкам на ползуне. Монтажные пальцы позволяют быстрое отсоединение кронштейна от шасси. Система привода 50 может, как вариант, быть установлена на верхней телескопической части 12а (главная принадлежность) или на оси 14. Как показано на фиг. 6, кронштейн 56 имеет отверстие 84, дающее доступ к точке поддомкрачивания в основании ползуна.
Редуктор 70 имеет кожух (или футляр) 84, к которому с одной стороны крепится мотор 52, а с другой стороны которого выступает выходной вал с ведущей шестерней 60. Кожух 84 имеет выступающую проушину, которая шарнирно соединена на оси 57 с монтажным кронштейном 56. Мотор 52 и редуктор 70 заключены в кожух, защищающий внутренние компоненты от загрязнения внешней среды, мусором и т.д., что может привести в неисправности.
Линейный позиционный исполнительный механизм 58 простирается между кронштейном 56 (на ближайшем конце оси 14) и мотором 52. Позиционный исполнительный механизм имеет первый конец 30 и второй конец 32. Первый конец шарнирно соединен с осью центровой опоры 34, расположенной на определенном расстоянии от оси вращения 38 ведомой шестерни 20, а второй конец 32 шарнирно соединен с осью центровой опоры 36, расположенной на определенном расстоянии от оси вращения 40 ведущей шестерни 60. Таким образом, линейное перемещение исполнительного механизма 58 преобразуется во вращательное движение ведущей шестерни 60 вокруг оси центровой опоры 57, более конкретно, перемещение оси вращения ведущей шестерни вокруг оси 57. Ведущая шестерня 60, таким образом, может вращаться между первой конфигурацией, в которой ведущая шестерня (цепная шестерня) 60 находится в зацеплении с ведомой шестерней (роликовая шестерня) 34 (фиг. 3), и второй конфигурацией, в которой ведущая шестерня 60 не находится в зацеплении с ведомой шестерней (фиг. 4).
Позиционный исполнительный механизм 58 может представлять собой, например, гидравлический исполнительный механизм, электромеханический исполнительный механизм (ЕМА) или электрогидравлический исполнительный механизм (ЕНА).
Как ясно видно из фигур 5 и 6, система привода 50 играет важную роль во второй (отсоединенной) конфигурации, во-первых, под действием силы тяжести (если воздушное судно летит в перевернутом положении), и, во-вторых, посредством смещающего элемента, который в этом варианте осуществления представлен скручивающей пружиной 88. Скручивающая пружина 88 в основном сформирована как спираль, ось которой совпадает с осью центровой опоры 57. Первый свободный конец пружины 88 уперт в палец 90, выступающий из кронштейна 56, а второй свободный конец уперт в палец 92, выступающий из системы привода 50. Под действием принуждающих усилий пружины и силы тяжести удлинитель концевого упора 94 упирается в кронштейн 56 с обратной стороны шасси, что предотвращает излишний поворот системы привода вокруг оси центровой опоры 57.
Линейный исполнительный механизм 58 может управляться силой (или электрическим сигналом) для регулирования величины в основном постоянной нагрузки, прикладываемой между ведущей шестерней 60 и ведомой шестерней 20, посредством чего допускается некоторая деформация различных деталей системы привода, которая, с другой стороны, предотвращает нежелательное разделение деталей, находящихся в зацеплении. Величина указанной нагрузки учитывает вибрационные и ударные нагрузки, а геометрию и кинематику системы можно оптимизировать для того, чтобы снизить нагрузки на исполнительный механизм и/или подшипники.
Указанный исполнительный механизм 58 можно регулировать воздействием силы, используя для этого крутящий момент мотора, затраченный на преодоление прогибов/деформаций на последнем участке трансмиссии между ведущей шестерней и ведомой шестерней. Для управления положением исполнительного механизма в замкнутой цепи может быть использована силовая обратная связь. Силовая обратная связь может не понадобиться, и исполнительный механизм можно регулировать в разомкнутой цепи посредством ограничения величины входного сигнала датчика и повышением надежности системы. Величину нагрузки можно установить в виде функции крутящего момента мотора плюс некоторый запас для обеспечения надежности сцепления, избегая при этом износа деталей. Для подтверждения состояния зацепления или отсоединения исполнительного механизма может оказаться необходимым датчик положения исполнительного механизма. Для контроля состояния цепи исполнительного механизма в состоянии зацепления могут быть использованы вращающийся датчик положения 96, например, вращающийся переменный дифференциальный трансформатор, или линейный датчик положения (не показан), например, линейный переменный дифференциальный трансформатор, включенные в конструкцию исполнительного механизма.
Дополнительно или в качестве варианта для предотвращения чрезмерного возрастания нагрузки, которая приложена ведущей шестерней на ведомую шестерню, можно использовать механический упор. Указанный упор можно разместить на позиционном исполнительном механизме или между мотором/редуктором и кронштейном.
Инерция (скорость) ведущей шестерни 60 и ведомой шестерни 20 будут выравниваться в состоянии зацепления с использованием имеющейся обратной связи со скоростью мотора (для скорости цепной шестерни), и для этой цели можно использовать или тахометр воздушного судна (не показан), или независимый датчик скорости роликовой шестерни, например, индуктивный датчик, который в качестве цели использует роликовую шестерню.
Можно отдать предпочтение гидравлическому позиционному исполнительному механизму, поскольку нагрузка, приходящаяся на ведомую шестерню 20 со стороны ведущей шестерни 60 в конфигурации зацепления, может оказаться более совместимой, чем любая из нагрузок ЕНА или ЕМА. Эта совместимость может положительно способствовать регулированию и амортизации нагрузки, предотвращая перегрузку сцепления ведущей шестерни с цепной шестерней. Предпочтительно, чтобы позиционный исполнительный механизм имел обратный ход таким образом, чтобы в случае неисправности самого исполнительного механизма или средств управления им, система привода вернулась во вторую конфигурацию. Кроме того, исполнительный механизм 58 может включать в себя запирающее устройство для удержания системы привода во второй (отсоединенной) конфигурации во время взлета, приземления и в полете. Указанный позиционный исполнительный механизм и запирающее устройство будут более подробно описаны ниже со ссылкой на фигуры с 8 по 14.
В то время как в системе привода фигур с 2 по 6 ведущая шестерня 60 представлена в виде цепной шестерни с двумя соосными рядами зубьев цепного зацепления, а ведомая шестерня 20 представлена как роликовая шестерня с двумя соосными рядами роликов, а редуктор 70 является планетарным редуктором, следует принимать во внимание, что другие системы привода могут быть осуществлены иначе.
Например, в варианте осуществления, изображенном на фиг. 7, цепная (ведущая) шестерня 60 заменена роликовой ведущей шестерней 64 с двумя соосными окружностями роликов, а роликовая ведомая шестерня 34 заменена цепной шестерней 66 с двумя соосными окружностями роликовых зубьев. Роликовая шестерня 64 может быть сконструирована аналогично роликовой шестерне 34, несмотря на то, естественно, что у нее намного меньший диаметр, и поэтому меньше роликов. Роликовая шестерня в обоих вариантах осуществления может быть, как вариант, изготовлена как роликоцепная или роликовая шестерня с одним рядом роликов для зацепления с ведомой шестерней, изготовленной как цепная (не показана) шестерня с одни рядом цепных зубьев. Ведущая шестерня и ведомая шестерня могут быть, кроме того, как вариант, изготовлены как прямозубые шестерни или как зубчатые шестерни иного типа, входящие в зацепление и выходящие из него посредством позиционного исполнительного механизма 58.
В варианте осуществления, показанном на фиг. 7 планетарный редуктор также заменен редуктором 70а с параллельными осями. В этом варианте кронштейн 56а включает в себя две проушины, содержащие скобы, имеющие форму полумесяца, которые позволяют проводить оперативное соединение кронштейна 56а с осью 14 и отсоединение от нее. Мотор 52 жестко соединен, например, болтами, с кронштейном 65а. Редуктор 70а представляет собой двухступенчатый редуктор с параллельными осями с зацеплением прямозубых шестерен на каждой ступени понижения оборотов.
Двухступенчатый редуктор 70а с параллельными осями заключен внутри кожуха 84а, установленного с возможностью шарнирного вращения относительно кронштейна 56а. Таким образом, становится возможным прикрепить мотор 52 к кронштейну 56а, позволяя в то же время редуктору 70а поворачиваться относительно кронштейна 56а. По этой причине масса, перемещаемая позиционным исполнительным механизмом 58, меньше, чем в варианте осуществления на фигурах со 2 по 6, в которых позиционный исполнительный механизм 58 перемещает мотор и планетарный редуктор 70. Разумеется, что планетарный редуктор можно использовать вместо редуктора с параллельными осями в варианте осуществления фиг. 7, а редуктор с параллельными осями можно использовать взамен планетарного редуктора в варианте фигур со 2 по 6. Конструкция планетарного редуктора более компактна, однако редуктор с параллельными осями предоставляет большую свободу в конструкции при необходимости изменять углы между осью вращения ведущей шестерни и осью центровой опоры 57.
В то время как в иллюстрированных вариантах осуществления ведомая шестерня и ведущая шестерня представляли собой некоторое число соосных рядов роликов/цепных зубьев, следует принимать во внимание, что, как вариант, можно предложить один или три, или большее число соосных рядов роликов/цепных зубьев. Увеличение числа рядов роликов/цепных зубьев снижает нагрузку на каждый ряд роликов/цепных зубьев.
Аналогично компоновке показанной на фиг. 13, ведомая шестерня третьего варианта осуществления может быть прикреплена к колесу через гибкое соединение, например, через резиновую втулку, которая изолирует ведомую шестерню от деформирующих нагрузок от колеса.
В тех иллюстрированных вариантах осуществления, в которых шасси 10 оснащено двумя колесами, только одно колесо снабжено приводом, вероятно, что колеса воздушного судна, снабженные приводом, будут устанавливаться с внешней стороны обоих шасси относительно центральной оси воздушного судна. Как вариант приводом могут оснащаться внутренние колеса. Маловероятно, что приводом будут оснащены одно внутреннее колесо и одно внешнее, хотя это, разумеется, возможно. В тех случаях, когда приводом оснащают только наружные колеса или только внутренние колеса, рассмотренная система привода может нуждаться в подходе, который приведет к затратным осложнениям. Для максимального повышения однотипности компонентов система привода 50 должна содержать на обеих сторонах планетарного редуктора проушины для присоединения исполнительного механизма 58, и концевой упор 94, возможно, также придется устанавливать с обеих сторон. С подобными незначительными модификациями система привода 50 может устанавливаться с обеих сторон воздушного судна. Для этих целей планетарный редуктор может оказаться предпочтительнее, чем редуктор с параллельными осями.
На фиг. 8 оказан вариант осуществления, в котором смещающий элемент предложен в виде пластинчатой пружины 89, а не скручивающей пружины 88, которая показана на фиг 5. Пластинчатая пружина 89 одним концом шарнирно присоединена к кронштейну 56, а своим вторым концом шарнирно присоединена к кожуху мотора/редуктора. Пластинчатая пружина 89 расположена поперек и над осью 57. Упор 94А, неподвижный относительно мотора/редуктора, прижат к соответствующему упору 94В на кронштейне 56 для предотвращения излишнего поворота мотора/редуктора вокруг оси 57 в момент, когда система привода переходит во вторую конфигурацию (отсоединение).
На фиг. 9 показан другой вариант осуществления, в котором смещающий элемент принимает форму пружины 87 сжатия. Пружина сжатия одним концом шарнирно соединена с кронштейном 56, а своим вторым концом шарнирно соединена с кожухом мотора/редуктора системы привода 50. Ход пружины сжатия ограничивает телескопическая направляющая 91, предотвращающая потерю устойчивости сжатой пружины в тот момент, когда система привода переходит в первую конфигурацию (состояние зацепления).
Позиционный исполнительный механизм, изображенный в варианте осуществления на фиг. 9, может быть представлен самозапирающим позиционным исполнительным механизмом 58А. Самозапирающий исполнительный механизм может быть гидравлическим исполнительным механизмом, электромеханическим исполнительным механизмом (ЕМА) или электрогидравлическим исполнительным механизмом (ЕНА), аналогичными позиционному исполнительному механизму 58, описанному выше. Самозапирающийся исполнительный механизм 58А отличается от исполнительного механизма 58 тем, что указанный исполнительный механизм самозапирается в своем выдвинутом состоянии, что соответствует отсоединению второй конфигурации системы привода 50. Самозапирающийся исполнительный механизм отпирается, когда указанный исполнительный механизм получает команду на укорочение. В данной области техники известны и для этой цели могут быть использованы различные самозапирающие исполнительные механизмы. В том случае, когда в качестве самозапирающего исполнительного механизма используют гидравлический исполнительный механизм, запирающий механизм может содержать шаровой затвор, пальцевой затвор, одностадийный сегментный затвор или круговой затвор, например, аналогичный тому, который описан в Техническом отчете SAE 881434 «Запирающие исполнительные механизмы сегодня и завтра», Дж. Хелм и др. (Helm J. et al.) 1988 г. В случае гидравлического самозапирающего исполнительного механизма, запирающий механизм отпирает систему после того, как на исполнительный механизм подают гидравлическое давление. Могут быть применены аналогичные типы самозапирающего механизма в сочетании с электрогидравлическим исполнительным механизмом или электромеханическим исполнительным механизмом. В случае электромеханического исполнительного механизма, отпирание самозапирающего механизма в системе указанного исполнительного механизма может быть осуществлено механически, а не гидравлически.
Внедрение самозапирающегося исполнительного механизма обеспечивает надежную блокировку мотора/редуктора системы привода 50 во второй (отсоединенной) конфигурации. Нагрузка от возврата пружины сжатия 87 (или пластинчатой пружины 89, или пружины скручивания 88, в зависимости от того, какую из них используют) и нагрузка на позиционном исполнительном механизме 58А преимущественно невелики, что обусловлено механическими достоинствами, получаемыми в результате ориентации перечисленных компонентов относительно оси центровой опоры 57. Однако самозапирающие исполнительные механизмы страдают недостатком, который заключается в том, что запирающий механизм не позволяет проведение оперативной инспекции, что может потребовать создание системы диагностики и обнаружения неисправностей, добавляя вес, стоимость и сложность. В зависимости от типа используемого запирающего механизма может оказаться невозможным диагностировать и обнаруживать все потенциальные неисправности, таким образом, может возникнуть необходимость в системе дублирования.
В варианте осуществления, изображенном на фигурах 8 и 9, гидравлический исполнительный механизм 58, 58А имеет цилиндрический участок, прилегающий к концу 30 и кольцевой участок, прилегающий к концу 32 на противоположной стороне штока. Зацепление с системой привода 50 осуществляется посредством укорочения гидравлического исполнительного механизма 58, 58А при подаче давления внутрь кольцевого участка исполнительного механизма. В результате гидравлический исполнительный механизм функционирует в качестве механизма двустороннего действия такого типа, в котором давление может быть подано поочередно как внутрь цилиндрического, так и внутрь кольцевого участка, приводя к удлинению или к укорочению указанного исполнительного механизма. Гидравлические исполнительные механизмы двойного действия нуждаются в двух гидравлических линиях, что делает их более тяжелыми и более сложными в управлении, чем гидравлические исполнительные механизмы одностороннего действия. В обычных условиях, когда давление подают внутрь одного участка, давление во втором участке сбрасывают, подсоединяя его к возвратной линии низкого давления.
Другой альтернативой самозапирающему позиционному исполнительному механизму 58 А может быть предложенный (несамозапирающий) позиционный исполнительный механизм 58 с внешним запирающим механизмом. На фиг. 10 показан вариант использования, в котором предложено внешнее запирающее устройство 93, оформленное в виде самозапирающего щеколды-крюка и пальцевого запирающего механизма. Естественно, что внешнее запирающее устройство 93 может быть использовано в сочетании с самозапирающим исполнительным механизмом 58А для повышения уровня надежности.
Более подробно внешнее запирающее устройство 93 показано на фигурах 11 и 12. Самоблокирующий крюк и механизм, запирающий палец, составляют крюк 100, шарнирно насаженный на ось 102. Крюк 100 имеет челюсти, которые захватывают палец 104, прикрепленный к рычагу, для перемещения посредством редуктора мотора вокруг оси вращения 57. На фиг. 11 показано внешнее запирающее устройство 93 в отпертом положении, а на фиг. 12 показано указанное запирающее устройство 93 в запертом положении. Отпертое положение соответствует зацепленному состоянию системы привода 50, а запертое положение соответствует конфигурации системы привода в отсоединенном состоянии.
В открытом положении пружина растяжения 106 прижимает крюк 100 к упору 108 крюка. Внешнее запирающее устройство 93 кроме того включает в себя запирающий рычаг 110, его один конец шарнирно насажен на ось 112, а на противоположном конце имеется ролик 114. В открытом положении ролик 114 расположен вне пределов лекальной части 116 крюка. Как только палец 104 попадает в челюсти крюка 100, крюк поворачивается вокруг оси 102 до тех пор, пока ролик 114 на конце запирающего рычага 100 посредством пружины растяжения 106 приводится в зацепление с лекальной частью 116 крюка. Запирающий рычаг 110 находится в зацеплении с крюком 100, при этом палец 104, захваченный крюком 100, не может высвободиться из челюстей крюка 100 до тех пор, пока не освободится запирающий рычаг 100.
Размыкающий исполнительный механизм 118 рассчитан на возможность зацепления с запирающим рычагом, посредством вращения запирающего рычага 110 против часовой стрелки, как это показано на фиг. 12, вокруг оси центровой опоры 112 до тех пор, пока ролик 114 выйдет из лекальной части 116 крюка, давая возможность крюку 100 вращаться вокруг оси 102 до открытой позиции, изображенной на фиг. 11, таким образом, позволяя пальцу 104 высвободиться из челюстей крюка 100. Запирающее устройство 93, кроме того, содержит датчик близости 120 и мишень 122 для мониторинга положения запирающего рычага 110.
В отличие от описанного ранее самозапирающего исполнительного механизма, внешнее запирающее устройство 93 не реагирует на отказ позиционного исполнительного механизма, и запирающий механизм позволяет провести внешний осмотр. Более того, предполагается, что внешнее запирающее устройство 93 более устойчиво к сбоям и поэтому более надежно, чем самозапирающий исполнительный механизм 58А. Внешнее запирающее устройство 93 обладает теми же достоинствами, что и самозапирающий исполнительный механизм в части своей способности блокировать систему привода 50 во второй конфигурации вывода из зацепления. Однако внедрение внешнего запирающего устройства может оказаться более сложной задачей, чем установка самозапирающего исполнительного механизма.
В варианте осуществления, иллюстрированном на фигурах с 10 по 12, позиционный исполнительный механизм 58 и размыкающий исполнительный механизм 118 запирающего устройства 93 совместно приводятся в действие гидравлически. Предпочтительно, чтобы размыкающий исполнительный механизм 118 был напрямую соединен с гидравлическими линиями 95, питающими позиционный исполнительный механизм таким образом, чтобы не возникала необходимость в каком-либо дополнительном управлении размыкающим исполнительным механизмом 118. Когда позиционный исполнительный механизм 58 получает команду на укорочение, с тем чтобы подключить систему привода 50, размыкающий исполнительный механизм 118 высвобождает ведущую шестерню 60 для вращения вокруг оси центровой опоры 57.
Следует принимать во внимание, что в варианте осуществления, иллюстрированном на фиг. 10, пластинчатая пружина 89 варианта осуществления, изображенного на фиг. 8, или скручивающая пружина варианта на фигурах с 2 до 6 могут быть использованы как альтернатива пружине сжатия 87. Кроме того, следует принимать во внимание, что исполнительный механизм 58 может представлять собой реверсивный электрогидравлический исполнительный механизм или электромеханический исполнительный механизм в качестве альтернативы изображенному на фигуре гидравлическому исполнительному механизму. Аналогично, размыкающий исполнительный механизм 118 может быть электрогидравлическим исполнительным механизмом или электромеханическим исполнительным механизмом взамен описанному гидравлическому или исполнительному механизму.
В качестве альтернативы гидравлическому позиционному исполнительному механизму двустороннего действия можно использовать односторонний исполнительный механизм (одиночная питающая гидравлическая линия), оставляя участку полного сечения позиционного исполнительного механизма возможность «дышать» через непроницаемую для жидкости, но проницаемую для газа мембрану, тем самым сообщая участок полного сечения исполнительного механизма с атмосферой, но предотвращая поступление внутрь воды и загрязнителя. С другой стороны, необходимо отметить, что влажный воздух может попадать внутрь исполнительного механизма, следовательно, необходимо тщательно подбирать материалы для того, чтобы предотвратить коррозию и подавлять образование льда во время полета вследствие конденсации влажного воздуха.
Еще один альтернативный позиционный исполнительный механизм изображен на фигурах 13 и 14, в котором имеются два кольцевых участка с различной площадью поперечного сечения, скомпонованный таким образом, что исполнительный механизм может укорачиваться посредством одной гидравлической линии (одностороннего действия).
Исполнительный механизм 58В содержит два элемента 150, 151, между которыми шток образует два участка 152, 153 кольцевого сечения. Поршень оснащен гидравлическими каналами 154, которые позволяют подавать давление на оба участка штока, используя единое гидравлическое отверстие 155. Оба элемента 150, 151 имеют разные диаметры, обеспечивающие балансировку эффективных площадей кольцевого сечения исполнительного механизма таким образом, что при подаче гидравлического давления гидроцилиндр укорачивается. Наличие дополнительного элемента означает, что отличительный признак указанного гидроцилиндра состоит из двух сальниковых головок и двух комплектов сальников.
Позиционный исполнительный механизм 58В может заменить любой из описанных выше позиционных исполнительных механизмов 58, 58А.
Несмотря на то, что настоящее изобретение описывалось выше со ссылкой на один ли более предпочтительных вариантов осуществления, следует принимать во внимание, что возможно внесение различных изменений или модификаций без отступления от существа и объема настоящего изобретения в том виде, как оно изложено в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство управления вращением колес шасси самолета | 2021 |
|
RU2780699C1 |
| БЛОК ПРИВОДА ДЛЯ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ ОХЛАЖДЕНИЕМ | 2012 |
|
RU2601794C2 |
| КОЛЕСНЫЙ УЗЕЛ С ШЕСТЕРНЕЙ | 2015 |
|
RU2672152C2 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ ШАССИ ВОЗДУШНОГО СУДНА | 2010 |
|
RU2529558C2 |
| ЦЕВОЧНАЯ ШЕСТЕРНЯ ДЛЯ СИСТЕМЫ ПРИВОДА | 2015 |
|
RU2680301C2 |
| ПРИВОДНАЯ СИСТЕМА ШАССИ | 2013 |
|
RU2643857C2 |
| ПРИВОДНАЯ СИСТЕМА ШАССИ (ВАРИАНТЫ) | 2013 |
|
RU2643114C2 |
| КОНСТРУКЦИЯ ШАССИ ВОЗДУШНОГО СУДНА И УЗЕЛ ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 2009 |
|
RU2509685C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИДРОУСИЛЕНИЕМ | 2013 |
|
RU2650283C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |





Изобретение относится к системам привода для вращения одного или более колес шасси воздушного судна для целей руления по летному полю и/или для раскрутки перед посадкой. Система привода для вращения колеса шасси воздушного судна включает в себя мотор для вращения ведущей шестерни и ведомую шестерню для установки на колесе. При этом система привода имеет первую конфигурацию, в которой ведущая шестерня способна зацепляться с ведомой шестерней для обеспечения вращения мотором ведомой шестерни, и вторую конфигурацию, в которой ведущая шестерня не способна зацепляться с ведомой шестерней. Система привода дополнительно содержит самозапирающийся линейный позиционный исполнительный механизм для перемещения ведущей шестерни относительно ведомой шестерни. Причем позиционный исполнительный механизм имеет первый и второй концы, первый конец из которых шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведомой шестерни, а второй конец шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведущей шестерни. Повышается надежность при эксплуатации. 4 н. и 75 з.п. ф-лы, 14 ил.
1. Система привода для вращения колеса шасси воздушного судна, включающая в себя мотор для вращения ведущей шестерни и ведомую шестерню для установки на колесе, при этом система привода имеет первую конфигурацию, в которой ведущая шестерня способна зацепляться с ведомой шестерней для обеспечения вращения мотором ведомой шестерни, и вторую конфигурацию, в которой ведущая шестерня не способна зацепляться с ведомой шестерней, и система привода дополнительно содержит самозапирающийся линейный позиционный исполнительный механизм для перемещения ведущей шестерни относительно ведомой шестерни, причем позиционный исполнительный механизм имеет первый и второй концы, первый конец из которых шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведомой шестерни, а второй конец шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведущей шестерни.
2. Система привода по п. 1, в которой позиционный исполнительный механизм включает в себя гидравлический цилиндр.
3. Система привода по п. 2, в которой гидравлический цилиндр функционирует как двусторонний.
4. Система привода по п. 2, в которой гидравлический цилиндр функционирует как односторонний.
5. Система привода по п. 4, в которой гидравлический цилиндр имеет участок с кольцевым сечением с одной стороны штока и участок с цилиндрическим сечением с другой стороны штока, причем цилиндрический участок не находится под давлением.
6. Система привода по п. 5, в которой участок, не находящийся под давлением, соединен с атмосферой через непроницаемую для жидкости, но пропускающую газ мембрану.
7. Система привода по п. 4, в которой гидравлический цилиндр имеет первый элемент и второй элемент, образующие два участка с кольцевыми сечениями между первым и вторым элементами, указанные два участка с кольцевыми сечениями объединены для жидкости в единую гидравлическую камеру.
8. Система привода по п. 7, в которой два кольцевых участка имеют отличную друг от друга площадь сечения.
9. Система привода по п. 1, в которой самозапирающий исполнительный механизм способен блокировать систему привода во второй конфигурации.
10. Система привода по п. 1, дополнительно содержащая запирающее устройство, внешнее относительно позиционного исполнительного механизма для блокировки системы привода во второй конфигурации.
11. Система привода по п. 10, дополнительно содержащая размыкающий исполнительный механизм, предназначенный для высвобождения запирающего устройства.
12. Система привода по п. 11, в которой размыкающий исполнительный механизм предназначен для высвобождения запирающего устройства в момент, когда позиционный исполнительный механизм получает сигнал перевести систему привода из второй конфигурации в первую конфигурацию.
13. Система привода по п. 11, в которой размыкающий исполнительный механизм включает в себя гидравлический цилиндр.
14. Система привода по п. 13, в которой гидравлический размыкающий исполнительный механизм и гидравлический позиционный гидравлический механизм питаются от общей гидравлической питающей линии при работе в режиме системы привода по п. 2.
15. Система привода по п. 10, в которой запирающее устройство включает в себя механический запирающий рычаг.
16. Система привода по п. 15, в которой запирающее устройство включает в себя крюк, шарнирно закрепленный на шасси воздушного судна, и палец, расположенный на определенном расстоянии от оси вращения ведущей шестерни, в которой указанный крюк перемещается между запертым положением, в котором палец захвачен крюком, и отпертым положением, в котором палец перемещается относительно крюка.
17. Система привода по п. 16, дополнительно содержащая щеколду, перемещающуюся между запертым и отпертым положениями, при этом указанная щеколда в закрытом положении находится в зацеплении с крюком и предотвращает вращательное перемещение крюка, а щеколда в отпертом положении допускает вращательное перемещение крюка.
18. Система привода по п. 17, в которой при работе в режиме по п. 11 размыкающий исполнительный механизм соединен со щеколдой для отсоединения щеколды от крюка.
19. Система привода по п. 1, в которой позиционный исполнительный механизм имеет обратный ход.
20. Система привода по п. 1, в которой одна из ведущих шестерен и ведомая шестерня содержат цепную шестерню, а другая из ведущих шестерен и ведомая шестерня содержат комплект роликов, образующих окружность, причем каждый ролик вращается вокруг оси ролика на определенном расстоянии от оси вращения ведущей шестерни или ведомой шестерни соответственно.
21. Система привода по п. 1, в которой колесо приводится во вращение для руления воздушного судна по летному полю и/или для раскрутки колеса перед посадкой.
22. Система привода по п. 1, в которой мотор является мотором/генератором, который при работе в качестве генератора скомпонован для приложения энергии крутящего момента торможения для обеспечения вращения колеса.
23. Система привода по п. 1, в которой ведущая шестерня приспособлена для установки на ступице колеса, предпочтительно на наружном ободе ступицы.
24. Система привода по п. 1, которая поддерживается посредством кронштейна, жестко соединенного с осью, главной принадлежностью или ползуном шасси.
25. Система привода по п. 24, в которой кронштейн включает в себя две проушины, содержащие скобы, имеющие форму полумесяца, которые позволяют проводить оперативное соединение и отсоединение кронштейна.
26. Система привода для вращения колеса шасси воздушного судна, включающая в себя мотор для вращения ведущей шестерни и ведомую шестерню для установки на колесе, при этом система привода имеет первую конфигурацию, в которой ведущая шестерня способна зацепляться с ведомой шестерней для обеспечения вращения мотором ведомой шестерни, и вторую конфигурацию, в которой ведущая шестерня не способна зацепляться с ведомой шестерней, и система привода дополнительно содержит линейный позиционный исполнительный механизм для перемещения ведущей шестерни относительно ведомой шестерни и дополнительно содержит смещающий элемент для введения системы привода во вторую конфигурацию, причем смещающий элемент включает в себя по меньшей мере одну пластинчатую пружину, а позиционный исполнительный механизм имеет первый и второй концы, первый конец из которых шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведомой шестерни, а второй конец шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведущей шестерни.
27. Система привода по п. 26, в которой позиционный исполнительный механизм включает в себя гидравлический цилиндр.
28. Система привода по п. 27, в которой гидравлический цилиндр функционирует как двусторонний.
29. Система привода по п. 27, в которой гидравлический цилиндр функционирует как односторонний.
30. Система привода по п. 29, в которой гидравлический цилиндр имеет участок с кольцевым сечением с одной стороны штока и участок с цилиндрическим сечением с другой стороны штока, причем цилиндрический участок не находится под давлением.
31. Система привода по п. 30, в которой участок, не находящийся под давлением, соединен с атмосферой через непроницаемую для жидкости, но пропускающую газ мембрану.
32. Система привода по п. 29, в которой гидравлический цилиндр имеет первый элемент и второй элемент, образующие два участка с кольцевыми сечениями между первым и вторым элементами, указанные два участка с кольцевыми сечениями объединены для жидкости в единую гидравлическую камеру.
33. Система привода по п. 32, в которой два кольцевых участка имеют отличную друг от друга площадь сечения.
34. Система привода по п. 26, в которой позиционный исполнительный механизм представляет собой самозапирающий исполнительный механизм.
35. Система привода по п. 34, в которой самозапирающий исполнительный механизм способен блокировать систему привода во второй конфигурации.
36. Система привода по п. 26, дополнительно содержащая запирающее устройство, внешнее относительно позиционного исполнительного механизма для блокировки системы привода во второй конфигурации.
37. Система привода по п. 36, дополнительно содержащая размыкающий исполнительный механизм, предназначенный для высвобождения запирающего устройства.
38. Система привода по п. 37, в которой размыкающий исполнительный механизм предназначен для высвобождения запирающего устройства в момент, когда позиционный исполнительный механизм получает сигнал перевести систему привода из второй конфигурации в первую конфигурацию.
39. Система привода по п. 37, в которой размыкающий исполнительный механизм включает в себя гидравлический цилиндр.
40. Система привода по п. 39, в которой гидравлический размыкающий исполнительный механизм и гидравлический позиционный гидравлический механизм питаются от общей гидравлической питающей линии при работе в режиме системы привода по п. 27.
41. Система привода по п. 36, в которой запирающее устройство включает в себя механический запирающий рычаг.
42. Система привода по п. 41, в которой запирающее устройство включает в себя крюк, шарнирно закрепленный на шасси воздушного судна, и палец, расположенный на определенном расстоянии от оси вращения ведущей шестерни, в которой указанный крюк перемещается между запертым положением, в котором палец захвачен крюком, и отпертым положением, в котором палец перемещается относительно крюка.
43. Система привода по п. 42, дополнительно содержащая щеколду, перемещающуюся между запертым и отпертым положениями, при этом указанная щеколда в закрытом положении находится в зацеплении с крюком и предотвращает вращательное перемещение крюка, а щеколда в отпертом положении допускает вращательное перемещение крюка.
44. Система привода по п. 43, в которой при работе в режиме по п. 37 размыкающий исполнительный механизм соединен со щеколдой для отсоединения щеколды от крюка.
45. Система привода по п. 26, в которой позиционный исполнительный механизм имеет обратный ход.
46. Система привода по п. 26, в которой одна из ведущих шестерен и ведомая шестерня содержат цепную шестерню, а другая из ведущих шестерен и ведомая шестерня содержат комплект роликов, образующих окружность, причем каждый ролик вращается вокруг оси ролика на определенном расстоянии от оси вращения ведущей шестерни или ведомой шестерни соответственно.
47. Система привода по п. 26, в которой колесо приводится во вращение для руления воздушного судна по летному полю и/или для раскрутки колеса перед посадкой.
48. Система привода по п. 26, в которой мотор является мотором/генератором, который при работе в качестве генератора скомпонован для приложения энергии крутящего момента торможения для обеспечения вращения колеса.
49. Система привода по п. 26, в которой ведущая шестерня приспособлена для установки на ступице колеса, предпочтительно на наружном ободе ступицы.
50. Система привода по п. 26, которая поддерживается посредством кронштейна, жестко соединенного с осью, главной принадлежностью или ползуном шасси.
51. Система привода по п. 50, в которой кронштейн включает в себя две проушины, содержащие скобы, имеющие форму полумесяца, которые позволяют проводить оперативное соединение и отсоединение кронштейна.
52. Система привода для вращения колеса шасси воздушного судна, включающая в себя мотор для вращения ведущей шестерни и ведомую шестерню для установки на колесе, при этом система привода имеет первую конфигурацию, в которой ведущая шестерня способна зацепляться с ведомой шестерней для обеспечения вращения мотором ведомой шестерни, и вторую конфигурацию, в которой ведущая шестерня не способна зацепляться с ведомой шестерней, и система привода дополнительно содержит линейный позиционный исполнительный механизм для перемещения ведущей шестерни относительно ведомой шестерни и дополнительно содержит смещающий элемент для введения системы привода во вторую конфигурацию, причем смещающий элемент включает в себя по меньшей мере одну пружину сжатия, а позиционный исполнительный механизм имеет первый и второй концы, первый конец из которых шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведомой шестерни, а второй конец шарнирно соединен с осью центровой опоры, расположенной на фиксированном расстоянии от оси вращения ведущей шестерни.
53. Система привода по п. 52, в которой позиционный исполнительный механизм включает в себя гидравлический цилиндр.
54. Система привода по п. 53, в которой гидравлический цилиндр функционирует как двусторонний.
55. Система привода по п. 53, в которой гидравлический цилиндр функционирует как односторонний.
56. Система привода по п. 55, в которой гидравлический цилиндр имеет участок с кольцевым сечением с одной стороны штока и участок с цилиндрическим сечением с другой стороны штока, причем цилиндрический участок не находится под давлением.
57. Система привода по п. 56, в которой участок, не находящийся под давлением, соединен с атмосферой через непроницаемую для жидкости, но пропускающую газ мембрану.
58. Система привода по п. 55, в которой гидравлический цилиндр имеет первый элемент и второй элемент, образующие два участка с кольцевыми сечениями между первым и вторым элементами, указанные два участка с кольцевыми сечениями объединены для жидкости в единую гидравлическую камеру.
59. Система привода по п. 58, в которой два кольцевых участка имеют отличную друг от друга площадь сечения.
60. Система привода по п. 52, в которой позиционный исполнительный механизм представляет собой самозапирающий исполнительный механизм.
61. Система привода по п. 60, в которой самозапирающий исполнительный механизм способен блокировать систему привода во второй конфигурации.
62. Система привода по п. 52, дополнительно содержащая запирающее устройство, внешнее относительно позиционного исполнительного механизма для блокировки системы привода во второй конфигурации.
63. Система привода по п. 62, дополнительно содержащая размыкающий исполнительный механизм, предназначенный для высвобождения запирающего устройства.
64. Система привода по п. 63, в которой размыкающий исполнительный механизм предназначен для высвобождения запирающего устройства в момент, когда позиционный исполнительный механизм получает сигнал перевести систему привода из второй конфигурации в первую конфигурацию.
65. Система привода по п. 63, в которой размыкающий исполнительный механизм включает в себя гидравлический цилиндр.
66. Система привода по п. 65, в которой гидравлический размыкающий исполнительный механизм и гидравлический позиционный гидравлический механизм питаются от общей гидравлической питающей линии при работе в режиме системы привода по п. 53.
67. Система привода по п. 62, в которой запирающее устройство включает в себя механический запирающий рычаг.
68. Система привода по п. 67, в которой запирающее устройство включает в себя крюк, шарнирно закрепленный на шасси воздушного судна, и палец, расположенный на определенном расстоянии от оси вращения ведущей шестерни, в которой указанный крюк перемещается между запертым положением, в котором палец захвачен крюком, и отпертым положением, в котором палец перемещается относительно крюка.
69. Система привода по п. 68, дополнительно содержащая щеколду, перемещающуюся между запертым и отпертым положениями, при этом указанная щеколда в закрытом положении находится в зацеплении с крюком и предотвращает вращательное перемещение крюка, а щеколда в отпертом положении допускает вращательное перемещение крюка.
70. Система привода по п. 69, в которой при работе в режиме по п. 63 размыкающий исполнительный механизм соединен со щеколдой для отсоединения щеколды от крюка.
71. Система привода по п. 52, в которой позиционный исполнительный механизм имеет обратный ход.
72. Система привода по п. 52, в которой пружина сжатия ограничивается направляющей от потери устойчивости.
73. Система привода по п. 52, в которой одна из ведущих шестерен и ведомая шестерня содержат цепную шестерню, а другая из ведущих шестерен и ведомая шестерня содержат комплект роликов, образующих окружность, причем каждый ролик вращается вокруг оси ролика на определенном расстоянии от оси вращения ведущей шестерни или ведомой шестерни соответственно.
74. Система привода по п. 52, в которой колесо приводится во вращение для руления воздушного судна по летному полю и/или для раскрутки колеса перед посадкой.
75. Система привода по п. 52, в которой мотор является мотором/генератором, который при работе в качестве генератора скомпонован для приложения энергии крутящего момента торможения для обеспечения вращения колеса.
76. Система привода по п. 52, в которой ведущая шестерня приспособлена для установки на ступице колеса, предпочтительно на наружном ободе ступицы.
77. Система привода по п. 52, которая поддерживается посредством кронштейна, жестко соединенного с осью, главной принадлежностью или ползуном шасси.
78. Система привода по п. 77, в которой кронштейн включает в себя две проушины, содержащие скобы, имеющие форму полумесяца, которые позволяют проводить оперативное соединение и отсоединение кронштейна.
79. Шасси воздушного судна с системой привода по любому из пп. 1-78.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СИЛОВОЙ ГИДРОЦИЛИНДР ДВУСТОРОННЕГО ДЕЙСТВИЯ | 2002 |
|
RU2278304C2 |
| Захватное приспособление для торфа | 1935 |
|
SU47280A1 |
| US 3762670 A, 02.10.1973. | |||

