Изобретение относится к роторно-импульсным аппаратам, и может быть использовано в химической, фармацевтической, пищевой и других отраслях промышленности, нефтехимии и нефтепереработки для проведения процессов диспергирования, перемешивания, эмульгирования, экстрагирования, жидкостной экстракции, кавитационной обработки, деагломерации наноразмерных частиц, проведения реакций в гетерогенных системах жидкость-твердое или жидкость-жидкость и других процессов, в которых требуется локальный ввод большого количества энергии в небольшой объем.
Известен роторно-импульсный аппарат (патент РФ №2335337, B01F 7/00, B01F 5/06), содержащий корпус, имеющий впускной и выпускной патрубки, внутри корпуса установлены роторные и статорные диски, количеством не менее пяти, с зубчатыми элементами с параллельными друг другу рабочими поверхностями, размещенными по чередующимся концентрическим окружностям, при этом зубчатые элементы одной или нескольких концентрических окружностей роторного или статорного дисков смещены на величину, обеспечивающую перекрытие сквозных сечений между зубчатыми элементами соседней пары концентрических окружностей роторного и статорного дисков при открытом положении сквозного сечения любой другой соседней пары, отличающийся тем, что соотношение ширины зубчатого элемента к ширине промежутка между ними на соответствующей концентрической окружности составляет 0,5-3,0, преимущественно 0,65-1,10, а зазор между соседними статорными и роторными дисками преимущественно составляет 0,4-0,6.
Известное решение позволяет повысить эффективность работы роторно-пульсационного аппарата при одновременном улучшении однородности обрабатываемой среды за один цикл гомогенизации за счет интенсификации пульсаций скорости потока, позволяющих получить оптимальный размер частиц эмульсии - 5-10 мкм. Вместе с тем, в известном изобретении недостаточно эффективно происходит преобразование энергии, так как пространственно-временной масштаб генерируемых в аппарате пульсаций не согласован с акустическими характеристиками среды.
Известен роторно-импульсный аппарат (патент РФ №2516559, B01F 7/02) содержащий привод, корпус с входным и выходным патрубками и установленные в корпусе ротор и статор, на рабочих поверхностях которых выполнены концентрично расположенные по окружности ряды шипов, чередующихся с пазами, входные лопатки, жестко прикрепленные к рабочей поверхности ротора, и выходные лопатки, являющиеся выступами последнего ряда шипов и пазов, отличающийся тем, что он снабжен дополнительными входными лопатками, установленными между входными лопатками на роторе, который установлен с возможностью реверсивного вращения, при этом длина дополнительных входных лопаток меньше длины входных лопаток насоса, оси симметрии дополнительных входных лопаток, входных лопаток и выходных лопаток расположены радиально, а продольная ось напорного патрубка и центральные оси ротора и статора расположены на одной прямой.
Известное техническое решение позволяет аппарат увеличить срок службы аппарата с одновременным упрощением конструкции и сохранением функций диспергатора, гомогенизатора и насоса. Вместе с тем, конструкцией аппарата не предусмотрено повышение эффективности его работы за счет использования акустических характеристик среды.
Устройство-аналог настоящего изобретения - роторно-импульсный аппарат (патент РФ №2591974, B01F 7/00, B01F 7/28), содержащий корпус с входным и выходным патрубками с установленными в нем ротором и статором с рабочими элементами в виде концентрично расположенных зубьев, отличающийся тем, что ротор и статор на периферии имеют кольцевые рифленые рабочие зоны, а в рифленой зоне ротора выполнены радиальные каналы с уменьшающейся к периферии глубиной.
Направляющие каналы ротора выполнены с уменьшающейся к периферии ротора глубиной, что способствует увеличению скорости потока обрабатываемой среды на выходе из канала. Рифленая рабочая зона создает эффект истирания в тонком слое для дополнительного разрушения волокнистых включений, механоактивации дисперсной системы и образования устойчивых межмолекулярных связей. В то же время при вращении ротора происходит периодическое совмещение и перекрытие радиальных каналов ротора с каналами статора, что приводит к возникновению гидравлических ударов и развитию кавитации, в результате чего обрабатываемая среда подвергается интенсивным гидродинамическим и акустическим воздействиям. Совокупность указанных воздействий способствует интенсификации таких процессов, как гомогенизация, диспергирование и эмульгирование при обработке дисперсных систем с жидкой фазой.
В то же время, в устройстве-аналоге не предусмотрена адаптация к акустическим характеристикам обрабатываемой среды.
Устройство-прототип настоящего изобретения - роторно-импульсный аппарат (пат. США №9631732, B01D 17/04, B01D 17/042) в виде кавитационного реактора, содержащего импульсный клапан - корпус с входным патрубком для ввода потока жидкости и генерирования импульсного выходного потока, который подается на вход резонансной камеры, выполненной в форме трубки (далее по тексту - резонансная труба). В качестве импульсного клапана использует ротор с рядом регулярно отстоящих друг от друга углублений, при помощи которых образуются соединительные каналы между входным патрубком и выходным патрубком, подключенным к резонансной трубке. При вращении ротора за счет углублений возникает соединение между входным и выходным патрубками, которое регулярно открывается и закрывается, тем самым создавая импульсный выход, который приводит к формированию резонансных волн в резонансной камере. Ротор вращается с частотой, подходящей для создания кавитационных пузырьков, которые разрушаются в резонансной камере без повреждения вала устройства. Основным эффектом, достигаемым в устройстве-прототипе, является достижение условий, обеспечивающих создание кавитационного режима, а также снижение или даже полное исключение воздействия кавитационных пузырьков при их коллапсе на основные детали аппарата - корпус и вал.
Отметим следующие недостатки устройства-прототипа.
1) Генерирование пульсаций производится на частотах, которые соответствуют очень высоким гармоникам резонансной трубы, например, 17-й. В описании изобретения-прототипа приводится пример, в котором длина резонансной трубы составляет 500 мм, при этом собственная частота колебаний такой трубы составляет 1400 Гц (в предположении, что скорость звука в жидкости составляет 1500 м/с). При частоте вращения ротора 166,7 об/с (10000 об/мин) при наличии трех углублений на поверхности ротора, частота генерируемых в аппарате пульсаций составит 3×166,7=500 Гц. Далее в описании изобретения-прототипа делается заключение о необходимости создания резонанса на частоте, являющейся наименьшим общим кратным от двух частот - 500 Гц и 1400 Гц. Такой частотой является 7000 Гц, которая в 5 раз превышает первую (основную) гармонику для резонансной трубы, и в 14 раз - частоту возбуждаемых в аппарате колебаний.
Таким образом, в устройстве-прототипе резонансной трубы возбуждаются колебания, которые многократно превышают частоту основной гармоники. Как известно из теории колебаний (Ден-Гартог Д.П. Механические колебания. М.: Физматгиз, 1960. - 574 с.; Пейн Г. Физика колебаний и волн. М.: Мир, 1979. - 389 с), амплитуда таких колебаний существенно снижается по мере возрастания номера гармоники. Это приводит к резкому снижению эффекта резонансных колебаний (даже для второй гармоники амплитуда колебаний примерно на порядок ниже амплитуды первой гармоники).
2) Рекомендуемые в описании изобретения-прототипа частоты, оптимальные для создания кавитации - от 20 кГц до 26 кГц. Эти частоты существенно превышают частоту, генерируемую ротором при его вращении, т.е. амплитуда колебаний в резонансной трубе с такими гармониками будет чрезвычайно низка.
3) Для достижения кавитационных эффектов в устройстве-прототипе использованы чрезвычайно высокие скорости вращения ротора, что приводит к быстрому износу и повышенным энергозатратам.
4) Далее в устройстве-прототипе предлагается возможность применения дистального (т.е. находящегося на дальнем конце резонансной трубы, противоположном от присоединения к аппарату) клапана, регулировка которого позволит дополнительно осуществлять корректировку собственной частоты колебаний резонансной трубы. Действительно, из теории колебаний известно (Ден-Гартог Д.П. Механические колебания. М.: Физматгиз, 1960. - 574 с.; Пейн Г. Физика колебаний и волн. М.: Мир, 1979. - 389 с.), что граничные условия на каждом из концов резонансной трубы (что используется, например, в строительстве музыкальных инструментов - органов) влияют на форму стоячей волны в трубе и на частоты резонансных колебаний. Вместе с тем, отличие частот при полностью открытых концах (когда резонансная труба работает как полуволновой вибратор) и полностью закрытом свободном конце (когда резонансная труба работает как четвертьволновой вибратор) на основной гармонике не превышает значения 2, а по мере роста номера гармоники колебаний приближается к единице. Т.е. эффект открытия указанного клапана мало влияет на значение частот колебаний на высоких гармониках. Вместе с тем, энергия колебаний в аппарате при открывании дистального клапана будет снижаться, поскольку через открытый клапан может происходить истечение рабочей среды из аппарата.
Таким образом, в изобретении-прототипе не предусмотрена тонкая регулировка частоты собственных колебаний в резонансной трубе на частоту пульсаций, генерируемых в роторно-импульсном аппарате.
5) Попадание газовых или кавитационных пузырей в жидкость приводит к резкому снижению скорости звука в образовавшейся при этом газожидкостной смеси. Известно, что при газосодержании всего 1-2% скорость звука в воде снижается с ~1500 м/с до 72-100 м/с, т.е. в 15-20 раз (Нигматулин Р.И. Динамика многофазных сред. Часть 1. М: Наука. Гл. ред. физ.-мат. лит., 1987. - 464 с.) В результате чего частота собственных колебаний в резонансной трубе резко снижается (также в 15-20 раз), происходит «уход» с резонанса.
Таким образом, попытка применить в устройстве-прототипе принцип генерирования резонансных пульсаций реализована через гармоники высокого порядка, что приводит к резкому снижению эффекта колебаний, т.е энергия пульсаций используется неэффективно.
Задачей предлагаемого изобретения является повышение эффективности процессов диспергирования, интенсификация массообмена, снижение энергетических затрат за счет точной регулировки и реализации стабильных резонансных пульсаций на основных гармониках колебаний в дополнительных элементах аппарата - одной или нескольких резонансных камерах.
Поставленная задача достигается тем, что в роторно-импульсном аппарате, содержащем корпус с расположенным соосно ему статором цилиндрической либо конической формы, состоящий из неподвижных ребер, соосный ему ротор цилиндрической либо конической формы, соответственно форме статора, с установленными на нем ребрами, с образованием между неподвижными ребрами статора и вращающимися ребрами ротора зазора, при этом между соседними ребрами ротора и между соседними ребрами статора выполнены отверстия для прохода фаз, а вал ротора соединен с приводом, корпус снабжен центральным патрубком для ввода фаз и периферийным патрубком для отвода продуктов, а между корпусом и статором выполнена кольцевая камера, согласно изобретению, к кольцевой камере в нижней части корпуса подключена одна или несколько резонансных камер, заполненных жидкостью, при этом на противоположном от корпуса конце каждой из резонансных камер установлен выпускной клапан, резонансные камеры выполнены с возможностью плавной регулировки их объема, предпочтительно при помощи поршней с регулируемым положением, соединенных с исполнительными устройствами, а к корпусу подключены один или несколько датчиков давления, сигнал с которых подается на контроллер, с возможностью управления объемом резонансных камер путем подачи управляющего сигнала на исполнительные устройства.
Поставленная задача достигается тем, что в способе эксплуатации роторного-импульсного аппарата, заключающемся в подаче исходных компонентов в корпус аппарата, отводе продуктов из него, в передаче вращательного движения ротору, согласно изобретению, в ходе работы аппарата при помощи контроллера и исполнительных устройств происходит плавное изменение объема каждой из резонансных камер таким образом, чтобы сигнал, поступающий с датчиков давления, достигал максимального значения, соответствующего резонансу колебаний в системе «корпус - резонансные камеры».
Заявляемое техническое решение является новым, обладает изобретательским уровнем и промышленно применимо.
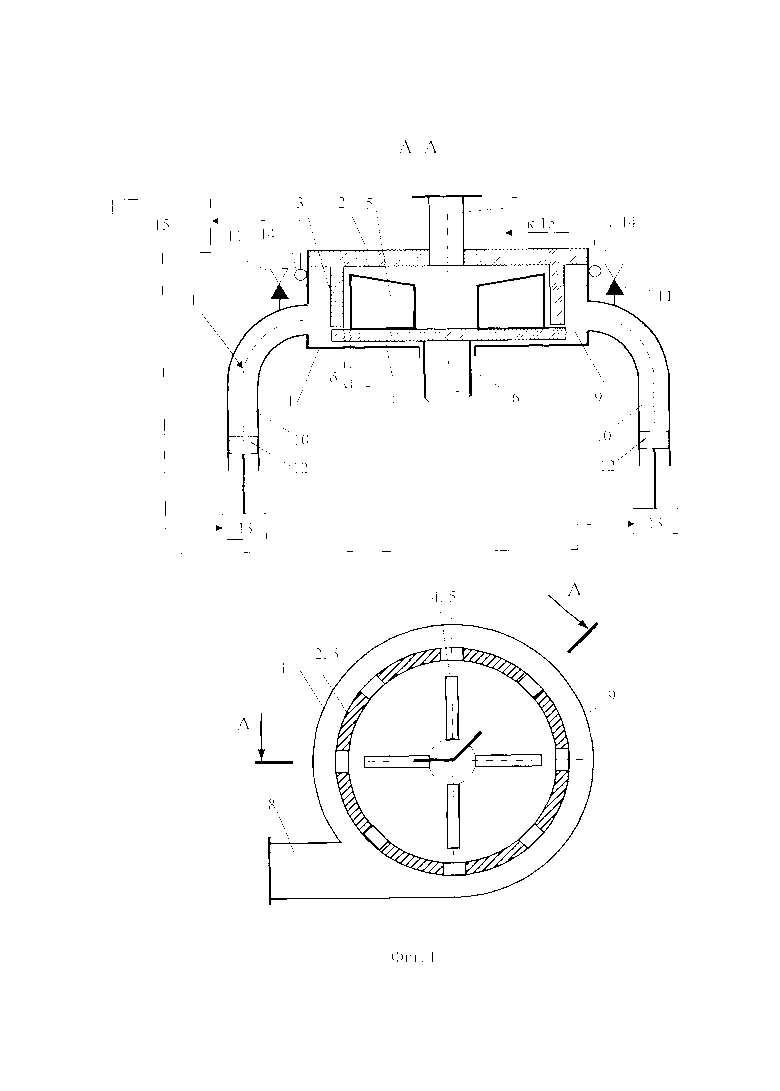
На фиг. 1 представлен общий вид предлагаемого устройства: продольный разрез А-А и поперечный разрез.
Заявляемые устройство и способ позволяют обеспечить повысить эффективность процессов диспергирования, интенсифицировать массообмен, снизить энергетические затраты за счет использования резонансных колебаний в системе «корпус аппарата - резонансные камеры». А благодаря наличию системы тонкой регулировки длины резонансных камер и контроля амплитуды давления с обратной связью удается поддерживать резонансные колебания при вариациях свойств обрабатываемой среды (изменению плотности и скорости звука при нагреве и т.п.).
Заявляемое техническое решение является новым, обладает изобретательским уровнем и промышленно применимо.
Роторно-импульсный аппарат содержит корпус 1 с внутренним статором 2 цилиндрической либо конической формы с внутренними неподвижными ребрами 3, соосный статору 2 ротор 4 цилиндрической либо конической формы (соответственно форме статора 2), с установленными на нем ребрами 5. Между неподвижными ребрами 3 статора 2 и вращающимися ребрами 5 ротора 4 образован зазор δ, при этом между соседними ребрами 5 ротора и между соседними ребрами 2 корпуса выполнены отверстия (называемые также прорезями или окнами) для прохода фаз, а вал 6 ротора 4 соединен с приводом (на фиг. 1 не показан). Неподвижные ребра 3 статора 2 могут иметь форму столбиков цилиндрической, призматической или иной формы, пластин плоской или изогнутой формы. Статор 2 может также в виде оболочки цилиндрической или конической формы с прорезями, в этом случае ребрами 3 являются части оболочки между прорезями. Таким же образом могут быть выполнены и ребра 5 - они могут иметь форму радиальных ребер, как показано на фиг. 1, либо, при изготовлении ротора в форме цилиндрической или конической оболочки с прорезями, ребрами 5 являются части оболочки ротора между прорезями. Ребра 3 и 5 расположены равномерно по окружности статора 2 и ротора 4 соответственно, поэтому все прорези в роторе 4 имеют одинаковую ширину, равно как и все прорези в статоре 2 имеют одинаковую ширину, но прорези в статоре и в роторе могут по ширине не совпадать. Корпус 1 снабжен центральным патрубком 7 для ввода фаз и периферийным патрубком 8 для отвода продуктов. Между наружной стенкой корпуса 1 и статором 2 находится кольцевая камера 9. К кольцевой камере 9 в нижней части корпуса подключена одна или несколько резонансных камер 10, заполненных жидкостью (как правило, той же жидкостью, которая подается в аппарат), при этом на противоположном от корпуса конце каждой из резонансных камер 10 установлен выпускной клапан 11 (воздухоотводчик для отделения газа или пара из жидкости), резонансные камеры 10 выполнены с возможностью плавной регулировки их объема, предпочтительно при помощи поршня 12 с регулируемым положением. Резонансные камеры 10 имеют протяженную форму, т.е. отношение их длины к поперечному размеру составляет не менее 5-10, и могут быть выполнены в виде прямолинейных или изогнутых цилиндрических труб. Регулировка положения поршней 12 осуществляется за счет исполнительных устройств 13 пневматического, электрического или иного типа. К корпусу 1, преимущественно у места соединения резонансных камер 10 с кольцевой камерой 9, подключены один или несколько датчиков давления 14, сигнал с которых подается на контроллер 15, управляющий объемом резонансных камер 10 путем подачи управляющего сигнала на исполнительные устройства 13.
При этом система контроллер 15, датчики давления 14, исполнительные устройства 13, поршни 12 совместно с резонансными камерами 10 позволяют обеспечить максимальное усиление пульсаций в рабочем объеме аппарата при резонансе.
Устройство работает следующим образом. Аппарат предварительно заполняют обрабатываемой средой, включают привод вращения ротора 5, в корпус 1 роторно-импульсного аппарата через центральный патрубок 7 подают исходные компоненты - суспензию, эмульсию, другие виды смесей. В зазоре 5 между неподвижными ребрами 3 статора 2 и вращающимися ребрами 5 ротора 4, имеющем предпочтительные размеры от 100 до 500 мкм, за счет большой окружной скорости вращения ротора возникают высокие сдвиговые напряжения, способствующие тонкому диспергированию фаз. А за счет прерывания потока двухфазной (или многофазной) смеси, проходящей через отверстия (прорези, окна) между ребрами 3 и 5 внутри аппарата возникают пульсации давления, частота которых определяется соотношением (Балабудкин М.А. О закономерностях гидромеханических в роторно-пульсационных аппаратах// Теоретические основы химической технологии, 1975, т. 9, №5, с. 783-788):

где n - частота вращения ротора, об/с;
z1 - число прорезей в статоре 2;
z2 - число прорезей в роторе 4;
d(z1, z2) - наибольший общий делитель чисел z1 и z2.
Исходя из известного в математике тождества (Виноградов И.М. Основы теории чисел. М.-Л.: Гос. изд. технико-теоретической литературы, 1952, 180 с.)

где (m, n) - наибольший общий делитель для двух целых чисел m и n (d(z1, z2) в формуле (1));
[m, n] - наименьшее общее кратное для двух целых чисел m и n,
уравнение (1) легко преобразовать к виду

где D(z1, z2) - наименьшее общее кратное для целых чисел z1 и z2.
Уравнение (3) позволяет определять частоты пульсаций давления, возникающих внутри аппарата.
В ходе работы аппарата при помощи контроллера 15 и исполнительных устройств 13 происходит плавное изменение объема каждой из резонансных камер 10 таким образом, чтобы сигнал, поступающий с датчиков давления 14, достигал максимального значения, соответствующего резонансу колебаний в системе «корпус 1 - резонансные камеры 10».
Пульсации давления, возникающие при совпадении окон статора 2 и ротора 4, передаются в кольцевую камеру 9, а из нее - в резонансные камеры 10. Датчики давления 14 преобразуют мгновенные значения давления в корпусе 1 и в кольцевой камере 9, который регистрируется и обрабатывается контроллером 15. Контроллер посредством подачи управляющего сигнала на исполнительные устройства 13 управляет положением поршней 12, за счет чего меняется объем резонансных камер 10.
При совпадении длины L резонансных камер 10 (от места соединения с кольцевой камерой 9 до поверхности поршня 12, на фиг. 1 длина L показана вдоль осевой линии резонансной камеры 10) с величиной, кратной четверти длины акустической (звуковой) волны в жидкости, заполняющей резонансные камеры 10, т.е. при выполнении условия

где k - номер гармоники; значение k=1 соответствует основной гармонике;
λ - длина звуковой волны, м.
Таким образом, резонансные камеры 10 работают как четвертьволновые акустические вибраторы. При возбуждении резонансных колебаний на основной гармонике амплитуда колебаний достигает максимума, и достигается наибольший эффект использования энергии пульсаций, сгенерированных в аппарате.
Контроллер 15 управляет положением поршней 10 таким образом, чтобы обеспечить максимальный уровень пульсаций давления, что достигается при выполнении условия (4), преимущественно при k=1, т.е.

где с - скорость звука в жидкости, заполняющей резонансные камеры, м/с;
ƒ - частота пульсаций, Гц.
При этом в кольцевой камере 9 и в рабочем объеме аппарата возникают резонансные пульсации давления, которые приводят к резкому увеличению пульсаций давления и скорости в окнах между ребрами, при этом происходит более тонкое диспергирование фаз, интенсифицируются массообменные процессы. Увеличивается доля энергии, вводимой в двухфазную систему, которая расходуется на выполнение полезной работы, снижаются непроизводительные затраты энергии. В результате повышается эффективность работы аппарата. Применение системы управления подстройкой резонансных камер 10 на резонансную частоту колебаний - котроллера 15 с датчиками давления 14 и исполнительных устройств 13 с поршнями 12 позволяет добиться отслеживания изменений в системе, связанных с нагревом, выделением в ней газов и другими причинами, способными приводить к изменению скорости звука.
Для автоматического удаления воздуха и других газов, образующих в ходе реакций или выделяющихся при нагреве жидкости при ее нагреве, служат выпускные клапаны - воздухоотводчики 11. Это позволяет исключить существенного изменения скорости звука за счет попадания в жидкость газов и добиться тонкой подстройки на резонанс за счет использования контроллера 15 с датчиками давления 14 и исполнительными устройствами 13 и поршнями 12.
Пример конкретного выполнения 1.
В роторно-импульсный аппарат, выполненный по схеме, показанной на фиг. 1, при помощи насоса подают воду с находящейся в ней углеродными нанотрубками в виде агломератов со средним размером 800 мкм. Число прорезей в статоре z1=16, в роторе z2=4. Частота вращения ротора n=1500 об/мин = 25 об/с.
Наименьшее общее кратное для целых чисел 16 и 4 равно D(16, 4)=16. Согласно формуле (3) частота пульсаций в роторно-импульсном аппарате составляет ƒ=25⋅16=400 Гц. Скорость звука в воде с=1500 м/с. Расчет по формуле (5) дает значение L=937,5 мм. Резонансные камеры 10 выполнены с запасом длиной 1,2 м. При отключенном контроллере 15 (работа аппарата в режиме изобретения-аналога) амплитуда пульсаций в кольцевой камере 9 составила 0,23 бар, а средний размер деагломерированных нанотрубок составил 430 мкм. Потребляемая мощность при этом составила 20 кВт.
При включении контроллера 15 и автоматической настройки на резонансные колебания амплитуда пульсаций в кольцевой камере 9 достигла 0,8 бар, а средний размер деагломерированных нанотрубок снизилась до 5,5 мкм. Уменьшение размера полученных частиц свидетельствует о значительно более эффективном использовании энергии. Потребляемая мощность при этом снизилась до 12 кВт.
Пример конкретного выполнения 2.
В роторно-импульсный аппарат, выполненный по схеме, показанной на фиг.1, при помощи насоса подают воду с находящейся в ней моторным маслом с растворенными в масле солями. Число прорезей в статоре z1=16, в роторе z2=5. Частота вращения ротора n = 3000 об/мин = 50 об/с.
Наименьшее общее кратное для целых чисел 16 и 5 равно D(16, 5)=80. Согласно формуле (3) частота пульсаций в роторно-импульсном аппарате ƒ=50⋅80=4000 Гц. Расчет по формуле (5) дает значение L=93,75 мм. Резонансные камеры 10 выполнены с запасом длиной 0,15 м. При отключенном контроллере 15 (работа аппарата в режиме изобретения-аналога) амплитуда пульсаций в кольцевой камере 9 составляет 0,15 бар, средний размер капель масла в эмульсии, отбираемой из выпускного патрубка 8, составляет 120 мкм, а доля экстрагированных из масла в воду солей составила 35%. Потребляемая мощность при этом составила 18 кВт.
При включении контроллера 15 и автоматической настройки на резонансные колебания амплитуда пульсаций в кольцевой камере 9 достигла 0,73 бар, средний размер капель масла в эмульсии снизился до 20 мкм, а доля экстрагированных из масла в воду солей возросла до 83%. Уменьшение размера капель масла свидетельствует о существенном увеличении эффективности использования энергии. Потребляемая мощность при этом снизилась до 7 кВт.
Таким образом, предлагаемое изобретение позволяет повысить эффективность процессов диспергирования, интенсифицировать массообмен, снизить энергетических затраты.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ГИДРОДИНАМИЧЕСКИЙ КАВИТАЦИОННЫЙ АППАРАТ | 2007 |
|
RU2357791C1 |
| РОТОРНО-ИМПУЛЬСНЫЙ АППАРАТ | 2004 |
|
RU2252826C1 |
| УСТРОЙСТВО ДЛЯ ФИЗИКО-ХИМИЧЕСКОЙ ОБРАБОТКИ ЖИДКОЙ СРЕДЫ | 2010 |
|
RU2434674C1 |
| РОТОРНЫЙ ГИДРОДИНАМИЧЕСКИЙ КАВИТАЦИОННЫЙ АППАРАТ ДЛЯ ОБРАБОТКИ ЖИДКИХ СРЕД (ВАРИАНТЫ) | 2010 |
|
RU2438769C1 |
| РОТОРНО-ИМПУЛЬСНЫЙ АППАРАТ | 2007 |
|
RU2333804C1 |
| Роторный аппарат | 1987 |
|
SU1479088A1 |
| Роторно-импульсный аппарат с разделенным кольцом статора | 2021 |
|
RU2785966C1 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ (РПА) | 1999 |
|
RU2166986C2 |
| Роторный аппарат | 1990 |
|
SU1768269A1 |
| УСТРОЙСТВО ОЧИСТКИ И ОБЕЗЗАРАЖИВАНИЯ ВОДЫ | 2005 |
|
RU2298528C2 |
Изобретение относится к роторно-импульсным аппаратам и может быть использовано в химической, фармацевтической, пищевой и других отраслях промышленности, нефтехимии и нефтепереработке для проведения процессов диспергирования, перемешивания, эмульгирования, экстрагирования, жидкостной экстракции, кавитационной обработки, деагломерации наноразмерных частиц, проведения реакций в гетерогенных системах жидкость-твердое или жидкость-жидкость и других процессов, в которых требуется локальный ввод большого количества энергии в небольшой объем. Роторно-импульсный аппарат содержит корпус с расположенным соосно ему статором цилиндрической либо конической формы, состоящий из неподвижных ребер, соосный ему ротор цилиндрической либо конической формы, соответственно форме статора, с установленными на нем ребрами, с образованием между неподвижными ребрами статора и вращающимися ребрами ротора зазора, при этом между соседними ребрами ротора и между соседними ребрами статора выполнены отверстия для прохода фаз, а вал ротора соединен с приводом, корпус снабжен центральным патрубком для ввода фаз и периферийным патрубком для отвода продуктов, а между корпусом и статором выполнена кольцевая камера, к кольцевой камере в нижней части корпуса подключена одна или несколько резонансных камер, заполненных жидкостью, при этом на противоположном от корпуса конце каждой из резонансных камер установлен выпускной клапан, резонансные камеры выполнены с возможностью плавной регулировки их объема, предпочтительно при помощи поршней с регулируемым положением, соединенных с исполнительными устройствами, а к корпусу подключены один или несколько датчиков давления, сигнал с которых подается на контроллер, с возможностью управления объемом резонансных камер путем подачи управляющего сигнала на исполнительные устройства. Способ эксплуатации роторно-импульсного аппарата заключается в подаче исходных компонентов в корпус аппарата, отводе продуктов из него, в передаче вращательного движения ротору, при этом в ходе работы аппарата при помощи контроллера и исполнительных устройств происходит плавное изменение объема каждой из резонансных камер таким образом, чтобы сигнал, поступающий с датчиков давления, достигал максимального значения, соответствующего резонансу колебаний в системе «корпус - резонансные камеры». Изобретение обеспечивает повышение эффективности процессов диспергирования, интенсифицирование массообмена, снижение энергетических затрат за счет точной регулировки и реализации стабильных резонансных пульсаций на основных гармониках колебаний в дополнительных элементах аппарата - одной или нескольких резонансных камерах. 2 н.п. ф-лы, 1 ил., 2 пр.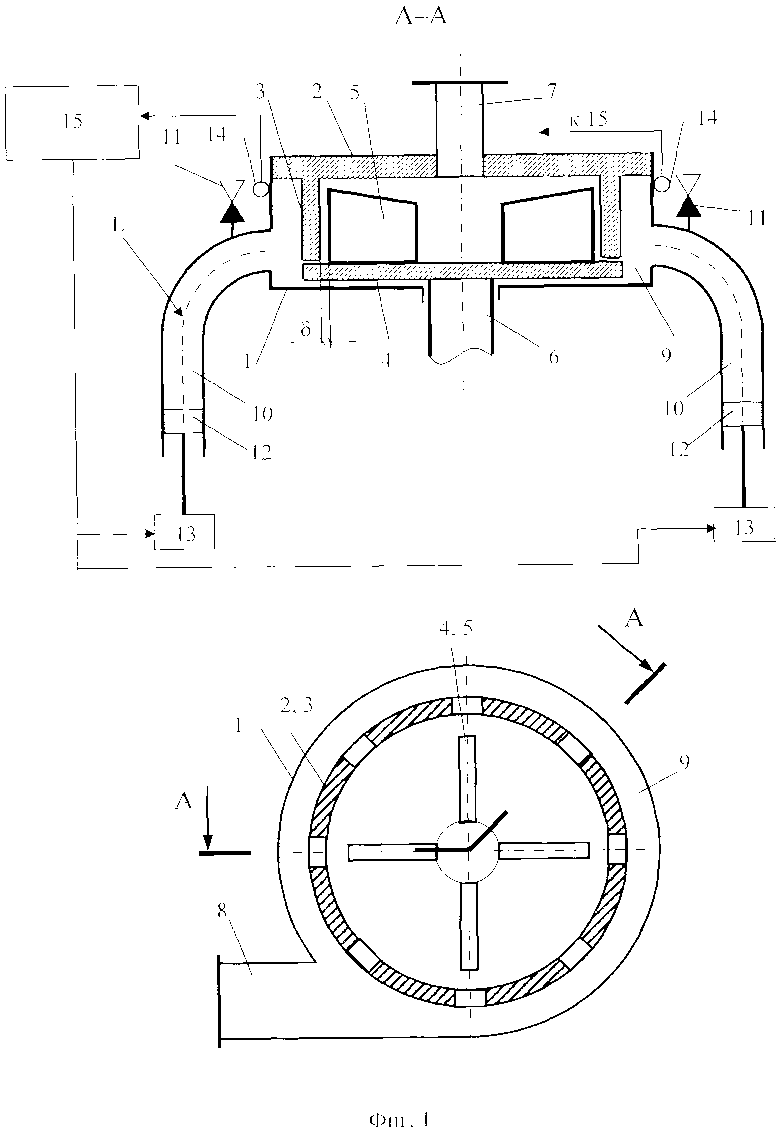
1. Роторно-импульсный аппарат, содержащий корпус с расположенным соосно ему статором цилиндрической либо конической формы, состоящий из неподвижных ребер, соосный ему ротор цилиндрической либо конической формы, соответственно форме статора, с установленными на нем ребрами, с образованием между неподвижными ребрами статора и вращающимися ребрами ротора зазора, при этом между соседними ребрами ротора и между соседними ребрами статора выполнены отверстия для прохода фаз, а вал ротора соединен с приводом, корпус снабжен центральным патрубком для ввода фаз и периферийным патрубком для отвода продуктов, а между корпусом и статором выполнена кольцевая камера, отличающийся тем, что к кольцевой камере в нижней части корпуса подключена одна или несколько резонансных камер, заполненных жидкостью, при этом на противоположном от корпуса конце каждой из резонансных камер установлен выпускной клапан, резонансные камеры выполнены с возможностью плавной регулировки их объема, предпочтительно при помощи поршней с регулируемым положением, соединенных с исполнительными устройствами, а к корпусу подключены один или несколько датчиков давления, сигнал с которых подается на контроллер, с возможностью управления объемом резонансных камер путем подачи управляющего сигнала на исполнительные устройства.
2. Способ эксплуатации роторно-импульсного аппарата по п. 1, заключающийся в подаче исходных компонентов в корпус аппарата, отводе продуктов из него, в передаче вращательного движения ротору, отличающийся тем, что в ходе работы аппарата при помощи контроллера и исполнительных устройств происходит плавное изменение объема каждой из резонансных камер таким образом, чтобы сигнал, поступающий с датчиков давления, достигал максимального значения, соответствующего резонансу колебаний в системе «корпус - резонансные камеры».
| US 9631732 B2, 25.04.2017 | |||
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ | 2015 |
|
RU2591974C1 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ | 2012 |
|
RU2516559C2 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ | 2006 |
|
RU2335337C2 |
| WO 2000001474 A1, 13.01.2000 | |||
| САМООЧИЩАЮЩИЙСЯ ДЕРЖАТЕЛЬ ГРУЗА ДЛЯ ОБЖАРОЧНОГО УСТРОЙСТВА | 2013 |
|
RU2641453C2 |

