ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
По данной заявке испрашивается приоритет предварительной заявки на выдачу патента США под порядковым № 62/035611 поданной 11 августа 2014 года, содержимое которой полностью включено в материалы настоящей заявки посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
Когда множество водителей используют транспортное средство, такое как автомобиль, каждый водитель, т.е. оператор, может иметь индивидуальные предпочтения установочных параметров транспортного средства. Биометрические системы могут быть включены в транспортные средства, чтобы давать автомобильному контроллеру возможность идентифицировать (или предсказывать идентичность) текущего водителя, также называемого «пользователем» или «оператором», и автоматически настраивать установочные параметры транспортного средства так, чтобы они соответствовали предпочтениям идентифицированного пользователя. Например, биометрические системы могут идентифицировать оператора транспортного средства на основании данных отпечатков пальцев, данных, относящихся к сетчатке, черт лица и т.д. Кроме того, другие системы могут использовать специфичные жесты, заранее определенные вокруг конкретного элемента транспортного средства (такого как руль), для настройки выбранных установочных параметров транспортного средства. Однако настоящие системы являются недостаточными, по меньшей мере, в отношении идентификации конкретного жеста конкретного оператора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой блок-схему системы жестов транспортного средства.
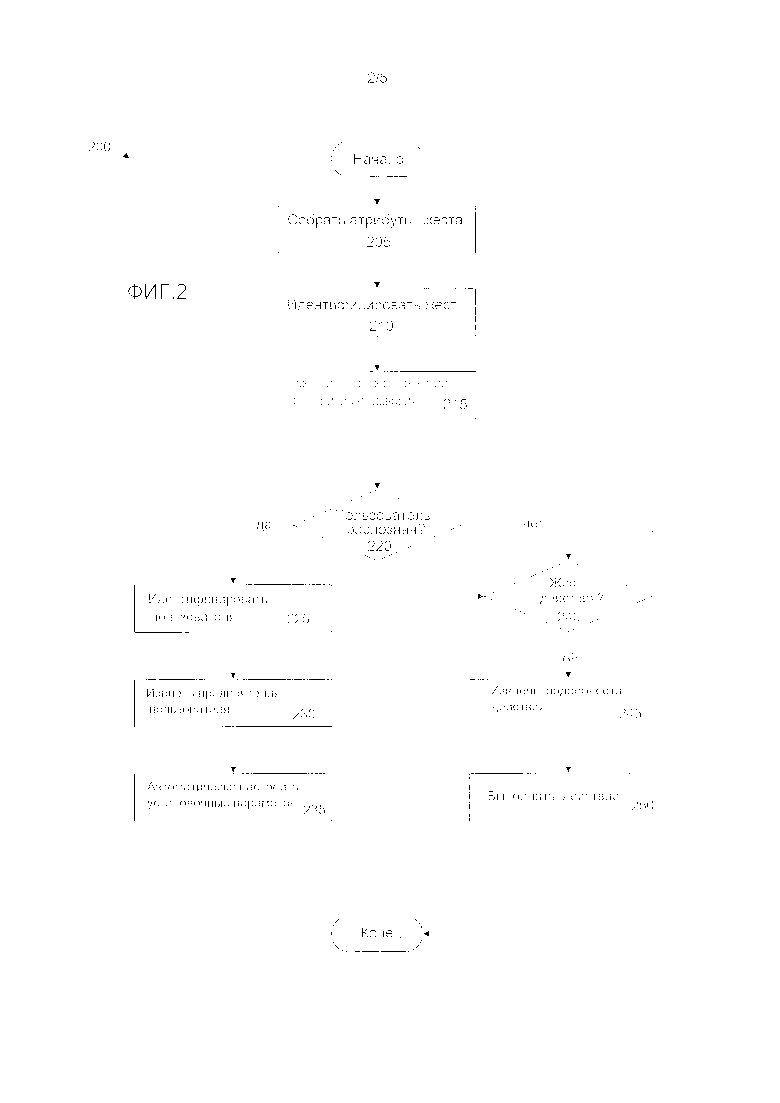
Фиг. 2 представляет собой блок-схему примерного способа идентификации пользователя и выполнения действия на основании жеста.
Фиг. 3 представляет собой блок-схему примерного способа выбора одиночного действия из множества жестов.
Фиг. 4 представляет собой примерную иллюстрацию пользователя транспортного средства, выполняющего жест.
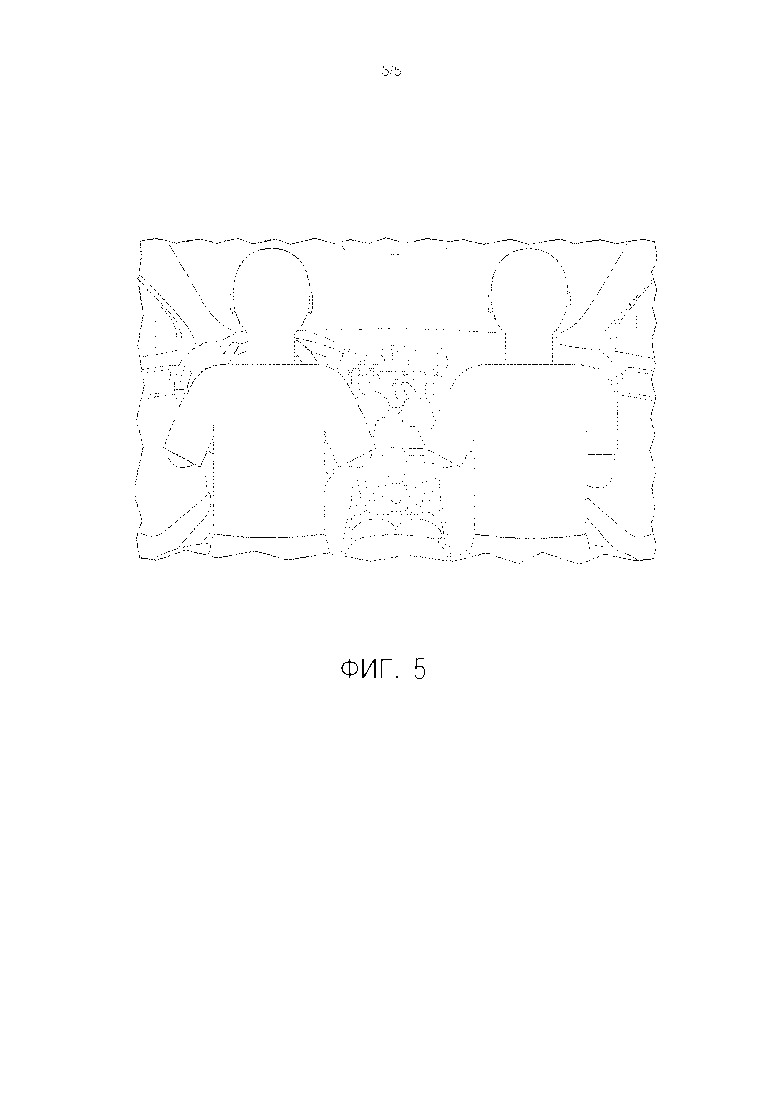
Фиг. 5 представляет собой примерную иллюстрацию пары пользователей транспортного средства, выполняющих множество жестов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Контроллер транспортного средства может быть запрограммирован разрешать неопределенность, когда один и тот же жест выполняется разными пассажирами или водителем транспортного средства. Например, если жест выполняется водителем транспортного средства возле руля, такой же жест выполняется пассажиром транспортного средства возле окна, контроллер может быть запрограммирован идентифицировать элемент транспортного средства, например, руль или окно, который должен быть настроен. Кроме того, контроллер может быть запрограммирован определять, какие установочные параметры пассажира или водителя должны быть применены. Контроллер, таким образом, предусматривает механизм для проведения различия между разными операторами, выполняющими один и тот же жест; в противном случае, жест, совершенный первым оператором, мог бы равным образом приводить к применению установочных параметров второго, иного оператора, причиняя неудобство первому оператору. В качестве еще одного примера, один и тот же жест может соотноситься с двумя отдельными действиями. Например, специфичный жест рукой может использоваться первым водителем для настройки зеркала заднего вида транспортного средства. Одновременно, тот же самый специфичный жест рукой также может использоваться вторым, иным оператором для настройки регулятора громкости транспортного средства. Преимущественно, контроллер может быть запрограммирован проводить различие между такими жестами.
Было осознано, что даже для заданного жеста каждый человек, как правило, имеет индивидуальный способ артикуляции жеста. В качестве примера, векторизация руки и пальцев при выполнении жеста может разниться между людьми. Эти отклонения могут изучаться и преимущественно использоваться для идентификации операторов транспортного средства. Установочные параметры транспортного средства затем настраиваются в соответствии с распознанными жестами, т.е. жестом, отождествленным с конкретным человеком. Например, векторизация руки и пальцев, а также артикуляция (подвижность) пальцев могут использоваться для инициации одного или более выходных сигналов. В дополнение, жесты могут изучаться в зависимости от ситуации, так чтобы контроллер мог узнавать, какой жест не принимать во внимание, если множество пассажиров или водитель транспортного средства выполняют один и тот же жест одновременно. Наконец, жесты могут изучаться в зависимости от ситуации, из условия, чтобы общий жест мог использоваться для идентификации водителя, а также для настройки установочных параметров транспортного средства.
В одном из примеров, жест вращения ручки может использоваться для идентификации и различения разных операторов транспортного средства. Жест вращения ручки может включать в себя вращение любой ручки на центральной консоли транспортного средства или вращение специальной ручки (например, ручки уровня громкости мультимедийной системы) на центральной консоли оператором транспортного средства. Контроллер может изучать специфичную векторизацию руки для каждого оператора транспортного средства при выполнении вращения ручки и использовать ее для идентификации и различения разных операторов. Например, векторизация руки и артикуляция пальцев каждого оператора при вращении ручки могут изучаться многократно во время эксплуатации транспортного средства. В качестве альтернативы, векторизация может изучаться во время отдельного процесса калибровки, такого как когда (или каждый раз, когда) оператор попадает в транспортное средство впервые. В качестве неограничивающих примеров, могут изучаться различные атрибуты жеста, в качестве совершаемого конкретным оператором, такие как праворукость или леворукость, угол входа при начале вращения ручки, количество пальцев, используемых для вращения ручки («опорная поверхность» оператора), скорость вращения, а также протяженность вращения (например, конечная точка относительно начальной точки вращения). Таким образом, могут изучаться специфичные атрибуты данного жеста в качестве совершаемого разными операторами транспортного средства. В дополнение, также могут изучаться специфичные атрибуты разных жестов в качестве совершаемых данным оператором транспортного средства. Например, в дополнение к изучению манеры вращения ручки данного пользователя, специфичная манера пользователя по выполнению машущего жеста также может изучаться, такая как праворукость или леворукость (например, машет ли оператор слева направо или справа налево), угол входа в замах, начальная и конечная точка взмаха, траектория взмаха и т.д.
Система управления транспортного средства может включать в себя программы в контроллере для распознавания жестов. В дополнение, контроллер, который является компьютером, включающим в себя процессор, память, хранящую команды, исполняемые процессором, может быть запрограммирован распознавать пользователя на основании распознавания жестов. Память контроллера может включать в себя базу данных, которая хранит пользовательские профили для множества операторов транспортного средства. Пользовательский профиль каждого оператора может включать в себя свойственные пользователю установочные параметры для различных элементов транспортного средства. Например, могут храниться установочные параметры, имеющие отношение к предпочтительному пользовательскому установочному параметру кондиционера, установочному параметру оконного стекла, установочному параметру радиоприемника и т.д. В дополнение, пользовательский профиль может включать в себя специфичную векторизацию руки для разных жестов. В ответ на жест контроллер может использовать различные атрибуты жеста для идентификации жеста. Контроллер может использовать идентифицированный жест, а также векторизацию руки, когда выполняется жест, чтобы идентифицировать пользователя, обращаясь к базе данных.
В дополнение к использованию жеста для идентификации оператора, жест также может быть связан с действием, в силу чего контроллер может быть запрограммирован идентифицировать действие. База данных может включать в себя схему действий, в которой хранятся подробный список жестов и связанные с ними действия. Например, машущий жест в первом направлении может быть связан с действием для повышения установочного параметра уровня громкости мультимедийной системы транспортного средства. В еще одном примере машущий жест в противоположном направлении может быть связан с действием для понижения установочного параметра уровня громкости мультимедийной системы транспортного средства.
В одном из примеров машущий жест может использоваться для настройки уровня громкости мультимедийной системы. Например, в ответ на взмахивание рукой слева направо в воздухе в салоне транспортного средства, уровень громкости установленной в транспортном средстве мультимедийной системы может повышаться. Контроллер может изучать специфичную векторизацию руки для каждого оператора транспортного средства и использовать ее для идентификации и различения разных операторов. Могут изучаться векторизация руки и артикуляция пальцев каждого оператора при вращении ручки. Например, могут изучаться атрибуты, такие как праворукость или леворукость, угол входа при начале вращения ручки, количество пальцев, используемых для вращения ручки («опорная поверхность» оператора) и т.д.
Таким образом, когда совершается жест, контроллер может идентифицировать действие, связанное с жестом, на основании атрибутов жеста, при этом идентифицируя оператора, выполняющего жест на основании векторизации руки, когда совершается жест. Следовательно, когда оператор приближается к ручке мультимедийной системы, чтобы повернуть ее, контроллер может идентифицировать оператора на основании манер, с которыми ручка подвергается приближению, и может автоматически выбирать предпочтительную радиостанцию, хранимую в пользовательском профиле данного оператора. В дополнение, установочный параметр уровня громкости мультимедийной системы может повышаться или понижаться на основании направленности вращения ручки.
В некоторых вариантах осуществления жесты, выполненные пассажирами или водителем транспортного средства, отличным от оператора, могут наделяться более низким приоритетом и/или игнорироваться. Например, оператор транспортного средства может идентифицироваться на основании машущего жеста, и может определяться, что оператор желает выбрать конкретную радиостанцию. Подобный машущий жест, совершенный пассажиром транспортного средства, может распознаваться в качестве выполняемого альтернативным пользователем вследствие привязки векторизации руки одного и того же жеста к пассажиру, а не к оператору. Следовательно, контроллер может определять, что выбор радиостанции производится альтернативным пользователем. Для избежания неразберихи и беспорядка выбор радиостанции альтернативного пользователя может временно игнорироваться.
Таким образом, жесты могут использоваться для выполнения действий в транспортном средстве, при этом артикуляция жеста, в том числе, специфичная векторизация руки и пальцев при выполнении жеста, может использоваться для идентификации оператора транспортного средства. Это позволяет настраивать установочные параметры оператора с меньшей неразберихой. В дополнение, посредством идентификации оператора и настройки весомости жестов, совершенных разными пассажирами или водителем транспортного средства, уменьшается неразбериха, вызываемая, когда множество пассажиров или водитель транспортного средства выполняют различные жесты для настройки установочных параметров транспортного средства. В общем и целом, повышается эффективность совершения действий оператором внутри транспортного средства.
Фиг. 1 иллюстрирует примерную систему 100 жестов транспортного средства. Система 100 включает в себя транспортное средство 101. Транспортное средство 101 включает в себя шину 102, компоненты 105 транспортного средства, центральную консоль 130, внутреннее пространство 145 салона и контроллер 155.
Шина 102, например, включающая в себя шину локальной сети контроллеров (CAN) или т.п., например, известную в области техники, может использоваться для обеспечения различных передач, включающих в себя данные из контроллера 155 в консоль 130, а также одной или более команд из контроллера 155 в компоненты 105 транспортного средства.
Компоненты 105 транспортного средства могут включать в себя руль 110, систему 115 климат-контроля, окна 120 и мультимедийную систему 125. Руль 110 может быть любого подходящего типа и может настраиваться в зависимости от предпочтений пользователя. Система 115 климат-контроля, например, система HVAC (отопления, вентиляции и кондиционирования воздуха), может поддерживать предпочтительную температуру в транспортном средстве 101. Окна 120 могут избирательно открываться или закрываться любым подходящим образом. Мультимедийная система 125, например, может включать в себя радиоприемник, порт подключения для портативного устройства, множество громкоговорителей и т.д.
Центральная консоль 130 включает в себя дисплей 135 и множество ручек и кнопок 140. Дисплей 135 может быть любого пригодного типа, например, экраном ЖКД (жидкокристаллического дисплея), и может отображать многообразие информации. Например, дисплей может показывать текущую радиостанцию, песню и исполняющего артиста и/или текущую температуру в качестве регулируемой системой 115 климат-контроля.
Ручки и кнопки 140 могут избирательно настраивать любой ли все из компонентов 105 транспортного средства. Например, одна из кнопок может вводить в действие систему 115 климат-контроля наряду с тем, что еще одна вводит в действие окна 120, а ручка может настраивать уровень громкости мультимедийной системы 125.
Внутренне пространство 145 салона включает в себя датчики 150 занятости сидений. Датчики 150 занятости сидений определяют, заняты или нет одно или оба из передних сидений. Если занято только одно сиденье, то жест пользователя должен быть происходящим от водителя. Если заняты оба, то контроллер 155 будет определять, выполнен ли жест водителем или пассажиром.
Контроллер 155 включает в себя программы для распознавания одного или более жестов. Контроллер 155 принимает входные сигналы с одного или более датчиков 162 движения, например, через шину 102. Контроллер 155 регистрирует атрибуты жеста, в том числе, векторизацию руки, артикуляцию запястья, артикуляцию пальцев, расположение внутри транспортного средства, положение жеста относительно компонента транспортного средства, движение в начале жеста и движение в конце жеста.
Контроллер 155 также запрограммирован выполнять идентификацию пользователя. Контроллер 155 собирает атрибуты жеста и на их основании определяет идентичность пользователя. Например, каждый человек имеет определенные уникальные атрибуты жеста, которые контроллер 155 может распознавать и сохранять. Например, векторизация руки, движение ладони и/или артикуляция запястья пользователя могут создавать характерную особенность жеста, которая по существу уникальна для пользователя. На основании таких атрибутов жеста, контроллер 155 может идентифицировать специфичных пользователей, даже когда множество пользователей выполняет жесты.
Контроллер 155 дополнительно запрограммирован идентифицировать действия, связанные с обнаруженными жестами. Компьютер 170 для идентификации действий сравнивает обнаруженные атрибуты жеста с хранимыми атрибутами жестов, связанными с действиями. Например, если артикуляция указывает вращение, соответствующее действие может состоять в том, повышать или понижать уровень громкости в мультимедийной системе 125.
Контроллер 155 включает в себя или присоединен с возможностью обмена информацией к базе 175 данных. База 175 данных может иметь любой пригодный тип, например, накопители на жестком диске, твердотельные накопители или любые другие энергозависимые или энергонезависимые носители.
База 175 данных типично хранит множество пользовательских профилей 180. Пользовательские профили 180 включают в себя векторизацию 182 пользователя и набор пользовательских установочных параметров 185. Векторизация 182 пользователя включает в себя атрибуты жеста, связанные с конкретными пользователями, и используется для идентификации пользователя на основании атрибутов жеста, собранных контроллером 155. Пользовательские установочные параметры 185 являются заданными установочными параметрами для компонентов транспортного средства, в том числе, например, предпочтительными радиостанциями, положением руля, температурой управления климатом и/или положением окна.
База 175 данных включает в себя множество схем 190 действий. Схемы 190 действий включают в себя хранимый жест 192 и хранимое действие 195. Хранимый жест 192 сравнивается с атрибутами жеста, собранными компьютером 160 для распознавания жестов, по которым выбирается специфичный жест 192. Хранимое действие 195 является действием, связанным с хранимым жестом 192, которое выполняется, когда распознается хранимый жест 192.
Фиг. 2 иллюстрирует способ 200 распознавания жестов и выполнения действия. Способ 200 начинается с этапа 205, на котором датчики 162 движения собирают атрибуты жеста по жесту пользователя. Например, по мере того, как пользователь выполняет жесты, например, как проиллюстрировано на фиг. 4, контроллер 155 собирает атрибуты жеста, например, векторизацию руки, артикуляцию пальцев и т.д.
Затем на этапе 210 контроллер 155 идентифицирует жест на основании атрибутов жеста. Более точно, компьютер 160 для распознавания жестов сравнивает собранные атрибуты жеста, собранные на этапе 205, и сопоставляет их со схемами 190 действий, чтобы определить специфичный жест 192 и соответствующее действие 195. В одной из примерных реализаций динамическая нейронная сеть может обучаться в качестве классификатора с множеством классов для распознавания жестов. Входные данные динамической нейронной сети являются последовательными векторами атрибутов жеста (например, артикуляции пальцев, векторизации руки, расположения внутри транспортного средства, положения жеста относительно компонента транспортного средства, движения в начале жеста и движения в конце жеста). Сеть имеет три уровня, а первые два уровня имеют биполярные сигмовидные нейроны. Заключительным уровнем сети является классификатор с многопеременной логистической функцией, который отображает решение классификации сети в набор вероятностей  , где
, где  - вероятность действия
- вероятность действия  при условии вектора
при условии вектора  входных данных в сеть.
входных данных в сеть.
Затем на этапе 215 контроллер назначает пользовательское значение, например, коэффициент, доверия жесту. Компьютер для идентификации пользователя сравнивает атрибуты жеста с описанием 180 жеста, назначая значение для того, насколько близко атрибуты жеста соответствуют векторизации 182 пользователя. Пользовательский коэффициент доверия основан на атрибутах жеста, в том числе, векторизации руки, артикуляции пальцев, расположении внутри транспортного средства, положении жеста относительно компонента транспортного средства, движении в начале жеста и движении в конце жеста. В одном из примеров реализации, значение доверия происходит из вероятностей, рассчитанных классификатором многопеременной логистической функции (заключительным уровнем нейронной сети), такой как известная. Пользовательское значение доверия, которое может быть выражено по шкале от нуля до единицы, или от нуля до ста процентов, является показателем того, насколько близко атрибуты жеста соответствуют атрибутам хранимых пользователей.
Затем на этапе 220 контроллер 155 определяет, хранится ли пользователь в базе 175 данных. Более точно, контроллер сравнивает коэффициент доверия с заданным пороговым значением для распознавания пользователя. Если пользователь распознан, способ 200 переходит к этапу 225. В противном случае, способ 200 переходит к этапу 240.
На этапе 225 контроллер 155 идентифицирует пользователя по меньшей мере частично на основании пользовательского коэффициента доверия. Более точно, компьютер 165 для идентификации пользователя назначает пользовательский профиль 180 с наивысшим коэффициентом доверия, который выбирается в качестве вероятного пользователя атрибутов жеста.
Затем на этапе 230 контроллер 155 извлекает предпочтения пользователя из базы 175 данных. Более точно, контроллер 155 извлекает пользовательские установочные параметры 185 из базы 175 данных. Предпочтения пользователя могут включать в себя предпочтительные радиостанции, установочные параметры кондиционера, расположение руля и т.д.
Затем на этапе 235 контроллер 155 автоматически настраивает компоненты 105 транспортного средства пользовательскими установочными параметрами 185.
На этапе 240 контроллер 155 определяет, является ли жест жестом действия. Более точно, компьютер 170 для идентификации действия сравнивает обнаруженные атрибуты жеста со схемой 190 действий и хранимыми жестами 192 для сопоставления жеста. Если так, способ 200 переходит к этапу 245. В противном случае, способ 200 переходит к этапу 205 для сбора атрибутов жеста.
На этапе 245 контроллер 155 сравнивает жест действия с хранимыми действиями в базе 175 данных. Более точно, контроллер 155 сравнивает атрибуты жеста с хранимыми жестами 192 в схемах 190 действий, чтобы определять специфичное действие 195.
Затем на этапе 250 контроллер 155 выполняет действие 195, определенное на этапе 245, и способ 200 заканчивается. Например, контроллер 155 может отправлять команду, например, через шину 102, в мультимедийную систему 125 для регулирования уровня громкости радиоприемника, на оконный силовой привод для перемещения оконного стекла 120 вверх или вниз, в систему 115 климат-контроля для повышения или снижения установочного параметра температуры, и т.д.
Фиг. 3 иллюстрирует способ 300 выбора действия из множества обнаруженных жестов. Например, когда множество жестов обнаружено у множества пассажиров и водителя транспортного средства, контроллер 155 может избирательно выполнять только действия водителя транспортного средства 101. Способ 300 начинается с этапа 305, на котором контроллер 155 собирает атрибуты жестов.
Затем на этапе 310 контроллер 155 анализирует атрибуты жеста, чтобы определить, является ли пользователь, выполняющий жест, водителем или пассажиром. Более точно, атрибуты жеста, собранные компьютером 160 для распознавания жестов, например, векторизация руки, векторизация запястья и артикуляция пальцев, отличаются в зависимости от того, является ли пользователь сидящим на водительском сиденье или пассажирском сиденье. Различия, например, могут включать в себя угол руки пользователя, движение руки пользователя, и т.д. Компьютер 165 для идентификации пользователя может определять как специфичного пользователя атрибутов жеста, так и то, является ли пользователь водителем или пассажиром. Компьютер 160 для распознавания жестов также может использовать информацию с датчиков 150 занятости сидений для определения, присутствуют ли оба, водитель и пассажир. На основании этих различий, компьютер 160 для распознавания жестов и компьютер 165 для идентификации пользователя может определять, выполняется ли жест водителем или пассажиром.
Затем на этапе 315 контроллер 155 определяет, выполняется ли множество жестов одновременно. Водитель и пассажир оба могут совершать жесты, как проиллюстрировано на фиг. 5. Компьютер 160 для распознавания жестов регистрирует атрибуты жестов и определяет, выполняется ли только один или множество жестов. Контроллер 155 может выполнять только одно действие за раз, значит, если выполняется множество жестов, способ переходит к этапу 320. В противном случае, способ переходит к этапу 325.
На этапе 320 контроллер 155 определяет, какой из множества жестов выполняется водителем, с использованием информации, определенной на этапе 310 компьютером 165 для идентификации пользователя. Контроллер 155 предпочтительно будет выполнять действие водителя.
Затем на этапе 325 контроллер 155 выполняет выбранное действие, и способ 300 этапов заканчивается. Более точно, компьютер 170 для идентификации действий берет жест водителя и сравнивает со схемами 190 действий в базе 175 данных, и выполняет требуемое действие 195.
Каждое из вычислительных устройств, указанных в настоящем документе, как правило, включает в себя команды, исполняемые одним или более вычислительными устройствами, идентифицированными выше, для выполнения операций или этапов способов, описанных выше. Машиноисполняемые команды могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML, и т.д. Вообще, процессор (например, микропроцессор) принимает команды, например, из памяти, машиночитаемого носителя и т.д., и исполняет эти команды, тем самым выполняя один или более способов, в том числе, один или более из способов, описанных в настоящем документе. Такие команды и другие данные могут храниться и передаваться с использованием многообразия машиночитаемых носителей. Файл в вычислительном устройстве, как правило, является совокупностью данных, хранимых на машиночитаемом носителе, таком как запоминающий носитель, оперативное запоминающее устройство и т.д.
Машиночитаемый носитель включает в себя любой носитель, который принимает участие в предоставлении данных (например, команд), которые могут читаться компьютером. Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители, например, включают в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы машиночитаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
Что касается сред, последовательностей операций, систем, способов и т.д., описанных в настоящем документе, то должно быть понятно, что, хотя этапы таких способов и т.д. были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие способы могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного в настоящем документе. Кроме того, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в настоящем документе, могли бы быть опущены. Другими словами, описания систем и/или способов в настоящем документе предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться как ограничивающие раскрытый объект изобретения.
Соответственно, должно быть понятно, что настоящее раскрытие, в том числе, вышеприведенное описание и прилагаемые чертежи, и нижеприведенная формула изобретения, подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, были бы очевидны специалистам в данной области техники после прочтения вышеприведенного описания. Объем изобретения должен определяться не на основании вышеприведенного описания, а исходя из формулы изобретения, приложенной к нему и/или включенной в непредварительную патентную заявку, основанную на ней, наряду с полным объемом эквивалентов, на которые дано право такой формуле изобретения. Ожидается и подразумевается, что будущие совершенствования будут происходить в областях техники, обсужденных в настоящем документе, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. В целом, должно быть понятно, что раскрытый объект изобретения допускает модификацию и изменение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ РАСПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702243C2 |
| ВЫРАЖЕНИЕ ВИЗУАЛЬНОГО ПРЕДСТАВЛЕНИЯ, ОСНОВАННОЕ НА ВЫРАЖЕНИИ ИГРОКА | 2010 |
|
RU2560794C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАХОЖДЕНИЯ РУКИ ПОЛЬЗОВАТЕЛЯ НА РУЛЕВОМ КОЛЕСЕ ТРАНСПОРТНОГО СРЕДСТВА И КОМПЬЮТЕР ДЛЯ ВЫПОЛНЕНИЯ СПОСОБА | 2016 |
|
RU2714657C2 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПОСТАНОВКИ НА СТОЯНКУ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2697743C2 |
| СИСТЕМА ИНВЕНТАРИЗАЦИИ СОДЕРЖИМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2663255C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ОТСЛЕЖИВАНИЯ СОДЕРЖИМОГО ИНВЕНТАРЯ | 2014 |
|
RU2686275C2 |
| СИСТЕМА АДАПТИВНОГО ИНТЕРФЕЙСА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2682102C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| Система совместно используемых транспортных средств | 2015 |
|
RU2696640C2 |


Изобретение относится к системам управления компонентами транспортного средства. Система управления по меньшей мере одним компонентом транспортного средства содержит компьютер, включающий в себя процессор и память. Память хранит команды, исполняемые компьютером, чтобы обнаруживать жест пользователя и жест второго пользователя на основании принятых данных с одного или более датчиков движения, идентифицировать атрибуты жеста пользователя, включающие в себя по меньшей мере одно из векторизации руки, артикуляции запястья и артикуляции пальцев, исходя из жеста, включающего в себя соответствующие движения каждого из множества пальцев пользователя. Атрибуты жеста дополнительно включают в себя по меньшей мере одно из движения в начале жеста и движения в конце жеста. На основании идентифицированных атрибутов жеста идентифицируют пользователя и второго пользователя и действия, которые должны быть выполнены в транспортном средстве. При определении, что водитель и пассажир совершили свои соответствующие жесты одновременно, выполняют действие для управления по меньшей мере одним компонентом транспортного средства в соответствии с жестом водителя и игнорируют жест пассажира. Достигается повышение комфорта управления транспортным средством. 2 н. и 14 з.п. ф-лы, 5 ил.
1. Система управления по меньшей мере одним компонентом транспортного средства, содержащая компьютер, включающий в себя процессор и память, причем память хранит команды, исполняемые компьютером, чтобы:
обнаруживать жест пользователя и жест второго пользователя на основании принятых данных с одного или более датчиков движения;
идентифицировать атрибуты жеста пользователя для жеста пользователя и жеста второго пользователя, включающие в себя по меньшей мере одно из векторизации руки, артикуляции запястья и артикуляции пальцев, исходя из жеста, включающего в себя соответствующие движения каждого из множества пальцев пользователя,
причём атрибуты жеста дополнительно включают в себя по меньшей мере одно из движения в начале жеста и движения в конце жеста;
на основании идентифицированных атрибутов жеста идентифицировать пользователя и второго пользователя и действия, которые должны быть выполнены в транспортном средстве;
определять, является ли один из пользователя и второго пользователя водителем, и является ли другой из пользователя и второго пользователя пассажиром; и
при определении, что водитель и пассажир совершили свои соответствующие жесты одновременно, выполнять действие в транспортном средстве для управления по меньшей мере одним компонентом транспортного средства в соответствии с жестом водителя и игнорировать жест пассажира.
2. Система по п. 1, в которой команды дополнительно включают в себя команды для настройки одного или более компонентов транспортного средства согласно одному или более заданным пользовательским установочным параметрам на основании атрибутов жеста.
3. Система по п. 2, в которой компоненты транспортного средства включают в себя по меньшей мере одно из руля, системы климат-контроля, механизма стеклоподъемника и мультимедийной системы.
4. Система по п. 2, в которой команды дополнительно включают в себя команды для извлечения заданных пользовательских установочных параметров из базы данных транспортного средства.
5. Система по п. 1, в которой команды дополнительно включают в себя команды для назначения пользовательского коэффициента доверия атрибутам жеста, причем пользовательский коэффициент доверия является показателем того, насколько близко атрибуты жеста соответствуют хранимым жестам для пользователей.
6. Система по п. 5, в которой команды дополнительно включают в себя команды для идентификации пользователя по меньшей мере частично на основании пользовательского коэффициента доверия.
7. Система по п. 1, в которой атрибуты жеста дополнительно включают в себя по меньшей мере одно из расположения внутри транспортного средства и положения жеста относительно компонента транспортного средства.
8. Система по п. 1, в которой жест пользователя представляет собой вращение ручки.
9. Система по п. 1, в которой жест пользователя представляет собой взмах руки.
10. Способ управления по меньшей мере одним компонентом транспортного средства, содержащий этапы, на которых:
обнаруживают жест пользователя и жест второго пользователя на основании принятых данных с одного или более датчиков движения;
идентифицируют атрибуты жеста пользователя для жеста пользователя и жеста второго пользователя, включающие в себя по меньшей мере одно из векторизации руки, артикуляции запястья и артикуляции пальцев, исходя из жеста, включающего в себя соответствующие движения каждого из множества пальцев пользователя, причём атрибуты жеста дополнительно включают в себя по меньшей мере одно из движения в начале жеста и движения в конце жеста;
на основании идентифицированных атрибутов жеста идентифицируют пользователя и второго пользователя и действия, которые должны быть выполнены в транспортном средстве;
определяют, является ли один из пользователя и второго пользователя водителем, и является ли другой из пользователя и второго пользователя пассажиром; и
при определении, что водитель и пассажир совершили свои соответствующие жесты одновременно, выполняют действие в транспортном средстве для управления по меньшей мере одним компонентом транспортного средства в соответствии с жестом водителя и игнорируют жест пассажира.
11. Способ по п. 10, дополнительно содержащий этап, на котором настраивают один или более компонентов транспортного средства согласно одному или более заданным пользовательским установочным параметрам на основании атрибутов жеста.
12. Способ по п. 11, в котором компоненты транспортного средства включают в себя по меньшей мере одно из руля, системы климат-контроля, механизма стеклоподъемника, навигационной системы и мультимедийной системы.
13. Способ по п. 10, дополнительно содержащий этап, на котором назначают пользовательский коэффициент доверия атрибутам жеста.
14. Способ по п. 13, дополнительно содержащий этап, на котором идентифицируют пользователя по меньшей мере частично на основании пользовательского коэффициента доверия.
15. Способ по п. 10, в котором атрибуты жеста включают в себя по меньшей мере одно из расположения внутри транспортного средства и положения жеста относительно компонента транспортного средства.
16. Способ по п. 10, в котором жест пользователя представляет собой по меньшей мере одно из вращения ручки и взмаха руки.
| US 6928180 B2, 09.08.2005 | |||
| US 7379541 B2, 27.05.2008 | |||
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ НА СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2001 |
|
RU2282972C2 |

