Изобретение относится к системам управления беспилотных летательных аппаратов (БПЛА), с управляющими устройствами, действующими автоматически с использованием излучаемых сигналов, а также к размещению и приспособлению приборов на БПЛА, преимущественно, с несимметричным корпусом, обеспечивающим за счет несимметричности своей формы создание подъемной силы при обтекании потоком воздуха в полете.
Известен БПЛА, патент RU №2297950 С1, способ применения которого принят за прототип. Известный БПЛА снабжают корпусом с носовым радиопрозрачным обтекателем, полезной нагрузкой, двигательной установкой и системой управления полетом по введенным координатам, включающей рулевые элементы и головку самонаведения (ГСН) на конечном участке траектории полета, снабженную антенной, закрепленной, под носовым радиопрозрачным обтекателем. Корпус БПЛА оснащают навесным топливным баком, который снабжен аэродинамическим обтекателем, закрепленным снаружи его корпуса с образованием дополнительного объема, в котором размещена аппаратура дополнительного пассивного широкодиапазонного канала ГСН, сообщенная электрической связью с системой управления, корректирующую работу системы управления до конечного участка траектории полета БПЛА. Для формирования подъемной силы, действующий на корпус БПЛА в полете, известный БПЛА может быть снабжен несимметричным корпусом, при этом верхняя часть поверхности носового радиопрозрачного обтекателя выполняется выпуклой, а нижняя его часть выполняется уплощенной. Для повышения точности наведения на конечном участке траектории полета БПЛА, путем обеспечения безинерционной работы антенны ГСН, антенна может быть выполнена в виде плоской активной фазированной антенной решетки (АФАР), закрепленной под носовым радиопрозрачным обтекателем с расположением ее излучающей поверхности параллельно поперечной оси беспилотного летательного аппарата и наклоном к его продольной оси в сторону нижней части поверхности носового радиопрозрачного обтекателя (A.M. Батков, А.А. Борисов "Критические технологии в создании авиационной техники нового поколения", сборник "Новости авиакосмической науки и технологии, МАКС 2003", стр. 9, изд. ОАО "Авиасалон", Межрегиональное Общество авиастроителей). Перед полетом БПЛА в систему управления полетом вводятся координаты траектории полета. В полете БПЛА система управления управляет рулевыми элементами для обеспечения траектории полета. Управление на конечном участке траектории полета осуществляется с использованием антенны ГСН, обеспечивающей повышение точности выполнения конечного участка.
Существенными признаками предлагаемого способа управления полетом БПЛА, совпадающими с признаками прототипа, являются следующие: способ управления полетом беспилотного летательного аппарата, который снабжен несимметричным корпусом с носовым радиопрозрачным обтекателем, верхняя и нижняя части поверхности которого образуют его ширину, при этом верхняя часть выполнена выпуклой, а нижняя часть уплощенной, полезной нагрузкой, двигательной установкой и системой управления полетом, включающей рулевые элементы и головку самонаведения с активной фазированной антенной решеткой, закрепленной под носовым радиопрозрачным обтекателем с расположением ее излучающей поверхности параллельно поперечной оси корпуса и наклоном к его продольной оси, основанный на введении координат траектории полета в систему управления полетом и управлении рулевыми элементами в полете для обеспечения траектории полета.
В известном способе управления БПЛА, закрепление АФАР с наклоном излучающей поверхности к продольной оси БПЛА с наклоном к его продольной оси в сторону нижней части поверхности носового радиопрозрачного обтекателя сопряжено с ее расположением в зоне выпуклой верхней части поверхности носового радиопрозрачного обтекателя меньшей ширины, что приводит к уменьшению суммарной площади (апертуры) АФАР и точности наведения БПЛА на конечном участке траектории полета.
Техническим результатом, на достижение которого направлен предлагаемый способ, является обеспечение возможности увеличения апертуры АФАР, для повышения точности наведения на конечном участке траектории полета БПЛА.
Для решения достижения указанного технического результата, в способе управления полетом беспилотного летательного аппарата, который снабжен несимметричным корпусом с носовым радиопрозрачным обтекателем, верхняя и нижняя части поверхности которого образуют его ширину, при этом верхняя часть выполнена выпуклой, а нижняя часть уплощенной, полезной нагрузкой, двигательной установкой и системой управления полетом, включающей рулевые элементы и головку самонаведения с активной фазированной антенной решеткой, закрепленной под носовым радиопрозрачным обтекателем с расположением ее излучающей поверхности параллельно поперечной оси корпуса и наклоном к его продольной оси, основанный на введении координат траектории полета в систему управления полетом и управлении рулевыми элементами в полете для обеспечения траектории полета, перед выполнением конечного участка траектории полета упомянутый аппарат системой управления поворачивают по крену на 180° и управляют его положением в полете на конечном участке траектории полета в повернутом по крену положении так, что упомянутая головка самонаведения сканирует земную поверхность.
Отличительными признаками предлагаемого способа является то, что перед выполнением конечного участка траектории полета упомянутый аппарат системой управления поворачивают по крену на 180° и управляют его положением в полете на конечном участке траектории полета в повернутом по крену положении так, что упомянутая головка самонаведения сканирует земную поверхность.
Благодаря наличию указанных отличительных признаков в совокупности с известными, достигается возможность увеличения апертуры АФАР, для повышения точности выполнения конечного участка траектории полета БПЛА.
Предложенное техническое решение может найти применение в различных отраслях народного хозяйства, использующих БПЛА, как для повышения точности подлета к цели маршрута, так и для повышения точности возврата к месту старта, например, в метеорологии для измерений и доставки измерительных зондов, в МЧС для разведки зоны чрезвычайной ситуации или доставки полезной нагрузки в зону повышенной опасности.
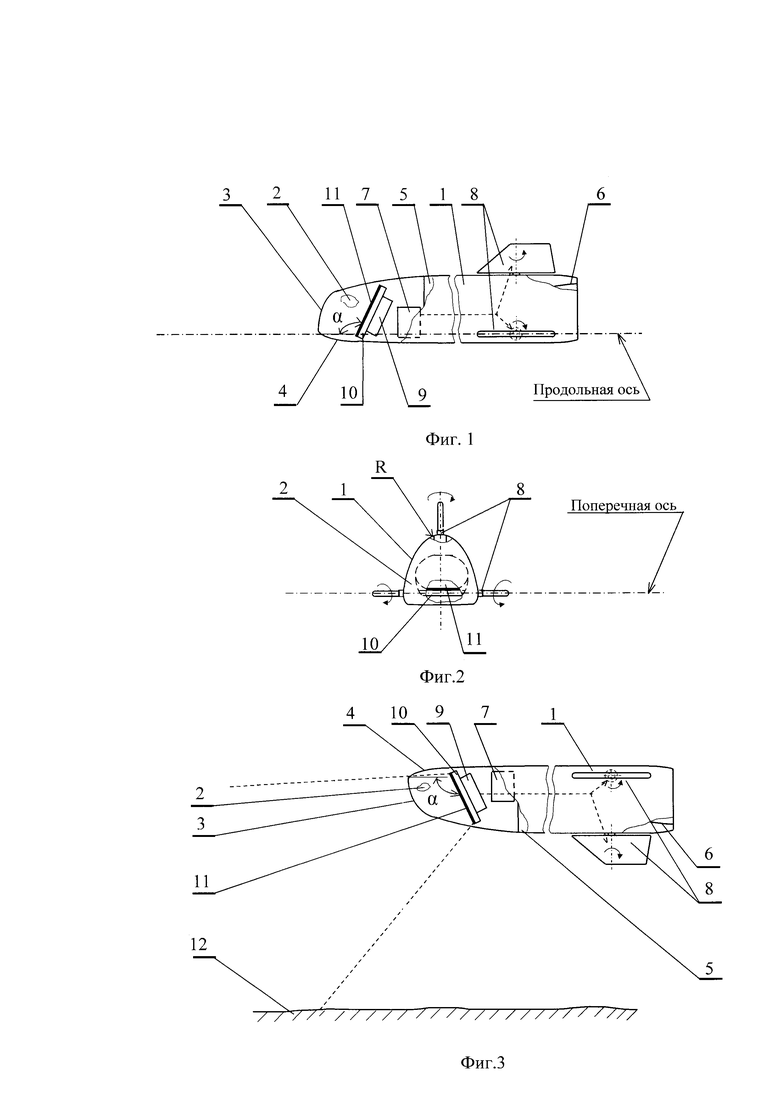
Техническое решение поясняется чертежами, фиг. 1-3.
На фиг. 1 представлено вид сбоку БПЛА в полете до конечного участка траектории полета.
На фиг. 2 представлен вид спереди БПЛА в полете до конечного участка траектории полета.
На фиг. 3 представлен вид сбоку БПЛА в полете на конечном участке траектории полета.
Представленный на чертежах БПЛА содержит несимметричный корпус 1 с носовым радио прозрачным обтекателем 2, верхняя 3 и нижняя 4 части поверхности которого образуют его ширину, при этом верхняя часть 3 выполнена выпуклой, а нижняя часть 4 уплощенной, полезной нагрузкой 5, двигательной установкой 6 и системой 7 управления полетом, включающей рулевые элементы 8 и головку 9 самонаведения, снабженную АФАР 10, закрепленной под носовым радиопрозрачным обтекателем 2 с расположением ее излучающей поверхности 11 параллельно поперечной оси корпуса 1 и наклоном к его продольной оси. Угол а наклона излучающей поверхности 11 АФАР 10 к продольной оси корпуса 1 обеспечивает ее направление в сторону верхней части 3 поверхности носового радиопрозрачного обтекателя 2, система 7 управления полетом выполнена с возможностью поворота беспилотного летательного аппарата по крену на 180° и управления полетом в повернутом по крену положении, а двигательная установка 6 выполнена с возможностью работы в повернутом по крену положении. Головка 9 самонаведения, посредством АФАР 10, обеспечивает сканирование земной поверхности 12 на конечном участке траектории полета БПЛА.
БПЛА работает следующим образом. Угол α (фиг. 1) наклона излучающей поверхности 11 АФАР 10 к продольной оси корпуса 1 обеспечивает ее направление в сторону верхней части 3 поверхности носового радиопрозрачного обтекателя 2, при этом нижняя часть АФАР 10 располагается вблизи уплощенной нижней части 4 поверхности носового радиопрозрачного обтекателя 2, образующей его ширину, то есть в районе его ширины, а верхняя часть АФАР 10 располагается вблизи верхней части 3 поверхности носового радиопрозрачного обтекателя 2, в районе ее задней части с наибольшим радиусом R (фиг. 2) кривизны. Благодаря этому, апертура (суммарная площадь) АФАР 10 существенно (на ~30%) увеличена, в отличие от прототипа с наклоном излучающей поверхности 11 АФАР 10 к продольной оси корпуса 1, обеспечивающим ее направление в сторону нижней части 4 (на чертежах не показано). Перед полетом БПЛА в систему 7 управления полетом вводятся координаты цели. Подлет БПЛА к цели осуществляется в нормальном положении, фиг. 1, при этом система 7 управления полетом управляет рулевыми элементами 8, согласно заложенной в нее логике управления, например, с измерением полетных перегрузок по осям координат и вычисления по ним положения БПЛА относительно цели (инерциальная система управления). Перед выполнением конечного участка траектории полета система 7 управления полетом, управляя рулевыми элементами 8, обеспечивает поворот БПЛА по крену на 180° (фиг. 3) и включает головку 9 самонаведения, которая посредством излучающей поверхности 11 АФАР 10 обеспечивает электронное (безинерционное) сканирование участков земной поверхности 12 в районе расположения цели, уточняет положение БПЛА относительно цели и, благодаря возможностям управления рулевыми элементами 8 в повернутом по крену положении и работы двигательной установки 6, увеличенной апертуре АФАР 10, обеспечивает уточненную траекторию полета БПЛА на конечном участке.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2699261C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2297950C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2565157C1 |
| СПОСОБ СНИЖЕНИЯ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2565158C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2007 |
|
RU2349508C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| Самолет дальнего радиолокационного обнаружения | 2023 |
|
RU2824829C1 |
| Самонаводящаяся электроракета | 2018 |
|
RU2686550C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |
Способ управления полетом беспилотного летательного аппарата, который снабжен несимметричным корпусом с носовым радиопрозрачным обтекателем, верхняя и нижняя части поверхности которого образуют его ширину, при этом верхняя часть выполнена выпуклой, а нижняя часть уплощенной, полезной нагрузкой, двигательной установкой и системой управления полетом, включающей рулевые элементы и головку самонаведения с активной фазированной антенной решеткой, закрепленной под носовым радиопрозрачным обтекателем с расположением ее излучающей поверхности параллельно поперечной оси корпуса и наклоном к его продольной оси, основанный на введении координат траектории полета в систему управления полетом и управлении рулевыми элементами в полете для обеспечения траектории полета. Перед выполнением конечного участка траектории полета аппарат системой управления поворачивают по крену на 180° и управляют его положением в полете на конечном участке траектории полета в повернутом по крену положении так, что головка самонаведения сканирует земную поверхность. Изобретение направлено на повышение точности траектории полета БПЛА на конечном участке. 3 ил.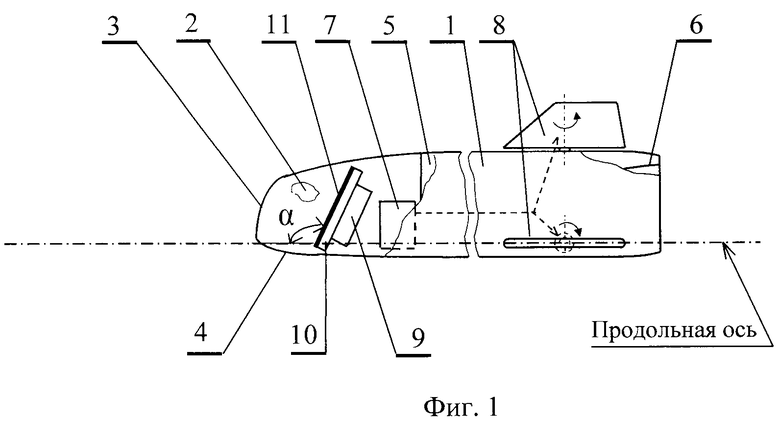
Способ управления полетом беспилотного летательного аппарата, который снабжен несимметричным корпусом с носовым радиопрозрачным обтекателем, верхняя и нижняя части поверхности которого образуют его ширину, при этом верхняя часть выполнена выпуклой, а нижняя часть уплощенной, полезной нагрузкой, двигательной установкой и системой управления полетом, включающей рулевые элементы и головку самонаведения с активной фазированной антенной решеткой, закрепленной под носовым радиопрозрачным обтекателем с расположением ее излучающей поверхности параллельно поперечной оси корпуса и наклоном к его продольной оси, основанный на введении координат траектории полета в систему управления полетом и управлении рулевыми элементами в полете для обеспечения траектории полета, отличающийся тем, что перед выполнением конечного участка траектории полета упомянутый аппарат системой управления поворачивают по крену на 180° и управляют его положением в полете на конечном участке траектории полета в повернутом по крену положении так, что упомянутая головка самонаведения сканирует земную поверхность.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2297950C1 |
| МАЛОЗАМЕТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2599198C2 |
| US 0009614272 B2, 04.04.2017 | |||
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2297950C1 |
| МАЛОЗАМЕТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2599198C2 |
| US 0009614272 B2, 04.04.2017. | |||

