ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к оптической системе, имеющей преломляющую поверхность и отражающую поверхность, которое может служить в качестве устройства захвата изображения, например, цифрового фотоаппарата, цифровой видеокамеры, автомобильной камеры, камеры мобильного телефона, камеры наблюдения, носимой камеры или медицинской камеры, и проекционного устройства, например, проектора.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[0002] В качестве оптической системы для использования в устройстве захвата изображения или проекционном устройстве, известна катадиоптрическая система, размер которой уменьшен за счет использования отражающей поверхности и преломляющий поверхности. Выложенная патентная заявка Японии № 2003-215458 описывает катадиоптрическую систему, в которой два катадиоптрических элемента, каждый из которых включает в себя отражающую поверхность и преломляющую поверхность. Кроме того, выложенная патентная заявка Японии № 2003-177321 описывает катадиоптрическую систему, включающую в себя два преломляющих элемента, единственный отражающий элемент (зеркало задней поверхности) и единственный катадиоптрический элемент.
[0003] Однако катадиоптрическая система согласно выложенной патентной заявки Японии № 2003-215458 включает в себя только два катадиоптрических элемента. Таким образом, трудно в достаточной степени корректировать различные типы аберрации. Кроме того, в катадиоптрической системе согласно выложенной патентной заявки Японии № 2003-177321, преломляющие элементы должны располагаться на стороне физического тела отражающего элемента. Таким образом, трудно в достаточной степени уменьшить размеры всей системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Задачей настоящего изобретения является обеспечение оптической системы, которая имеет малые размеры, но высокую производительность формирования изображения.
[0005] Согласно аспекту настоящего изобретения, оптическая система включает в себя первый оптический элемент, включающий в себя первый отражающий участок, имеющий выпуклую форму к стороне увеличения, второй оптический элемент, имеющий поверхность уменьшающей стороны, имеющую выпуклую форму к стороне увеличения и третий оптический элемент, имеющий поверхность увеличивающей стороны, имеющую выпуклую форму к стороне увеличения, причем поверхность уменьшающей стороны второго оптического элемента или поверхность увеличивающей стороны третьего оптического элемента включает в себя второй отражающий участок, причем третий оптический элемент включает в себя преломляющий участок, имеющий положительную оптическую силу, и при этом свет от стороны увеличения распространяется к стороне уменьшения последовательно через преломляющий участок первого оптического элемента, второй отражающий участок, первый отражающий участок, преломляющий участок второго оптического элемента и преломляющий участок третьего оптического элемента.
[0006] Дополнительные признаки настоящего изобретения явствуют из нижеследующего описания иллюстративных вариантов осуществления со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
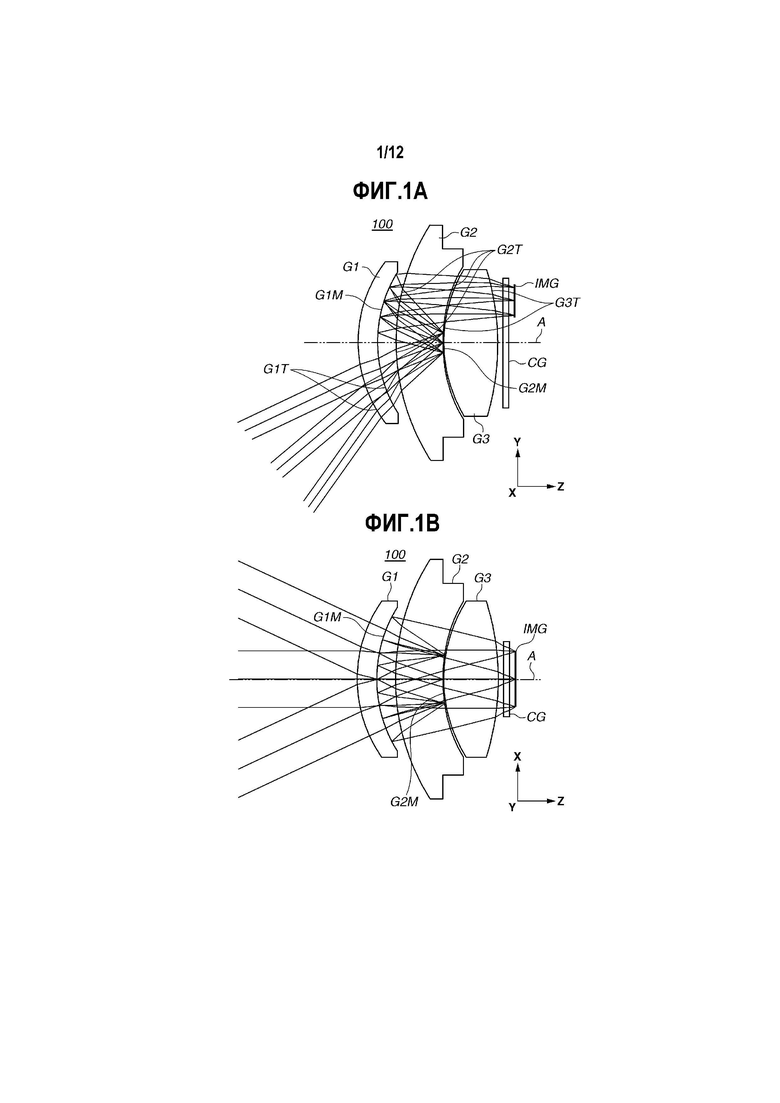
[0007] Фиг. 1A - схема основной части оптической системы согласно первому иллюстративному варианту осуществления настоящего изобретения (в поперечном сечении YZ). Фиг. 1B - схема основной части оптической системы согласно первому иллюстративному варианту осуществления (при наблюдении со стороны +Y).
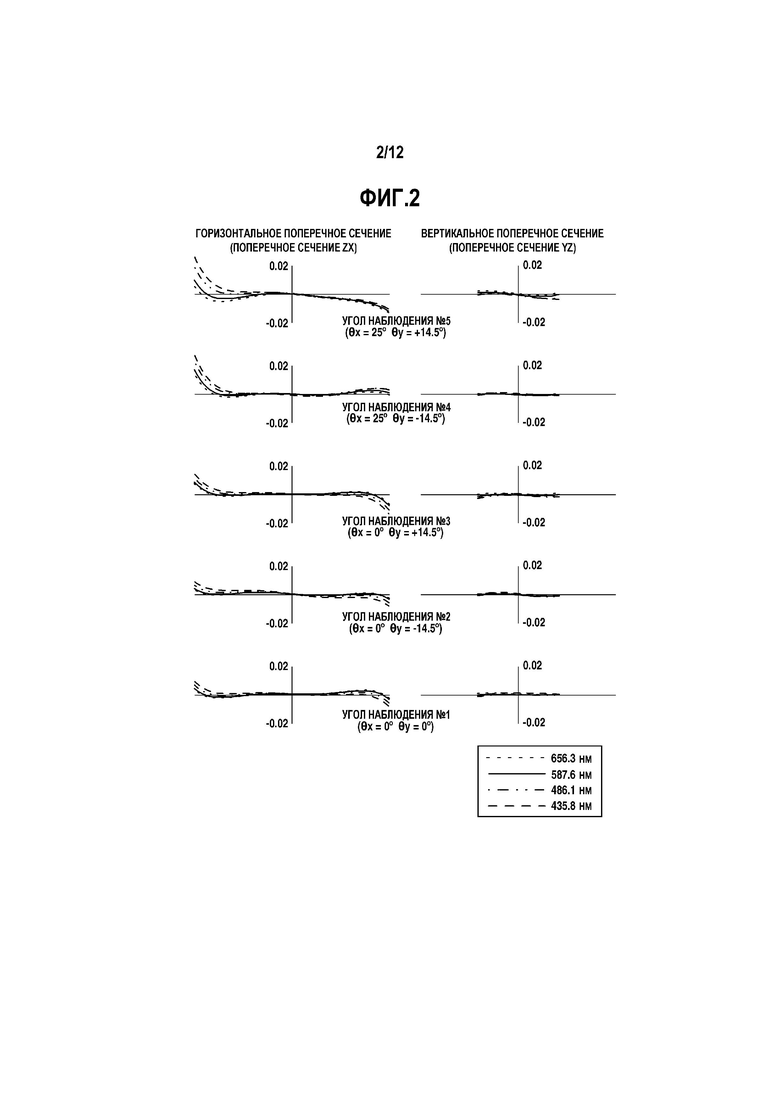
[0008] Фиг. 2 - диаграмма поперечной аберрации оптической системы согласно первому иллюстративному варианту осуществления.
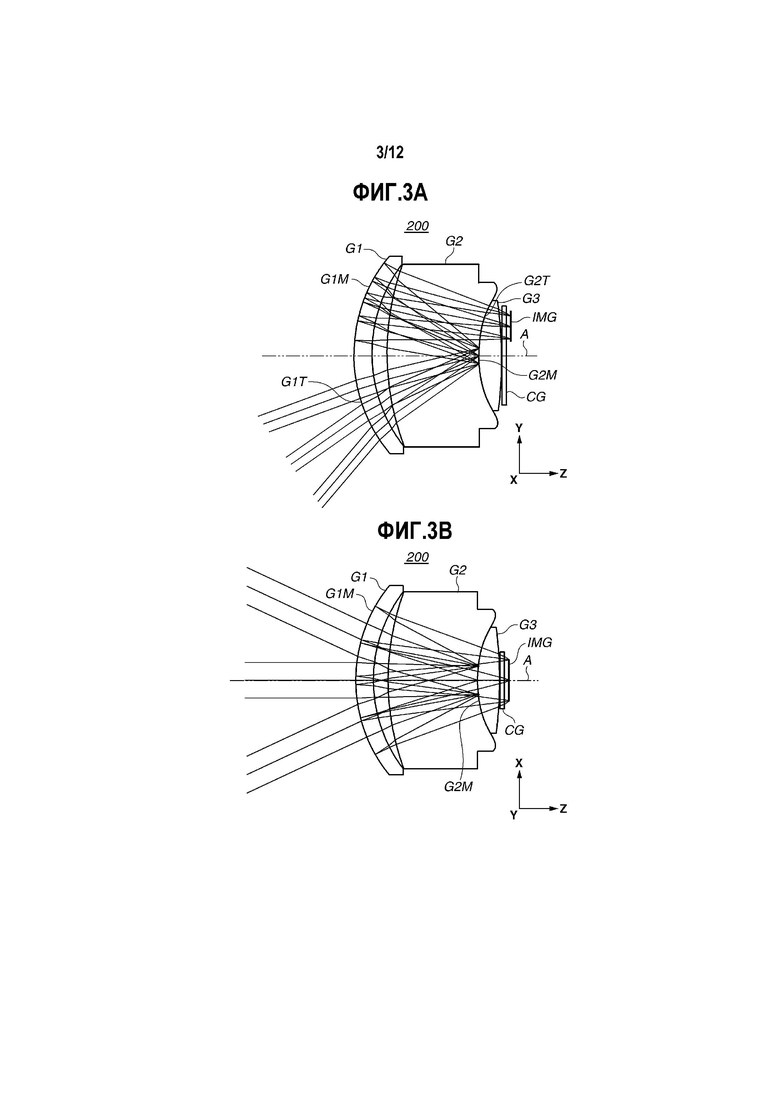
[0009] Фиг. 3A - схема основной части оптической системы согласно второму иллюстративному варианту осуществления настоящего изобретения (в поперечном сечении YZ). Фиг. 3B - схема основной части оптической системы согласно второму иллюстративному варианту осуществления настоящего изобретения (при наблюдении со стороны +Y).
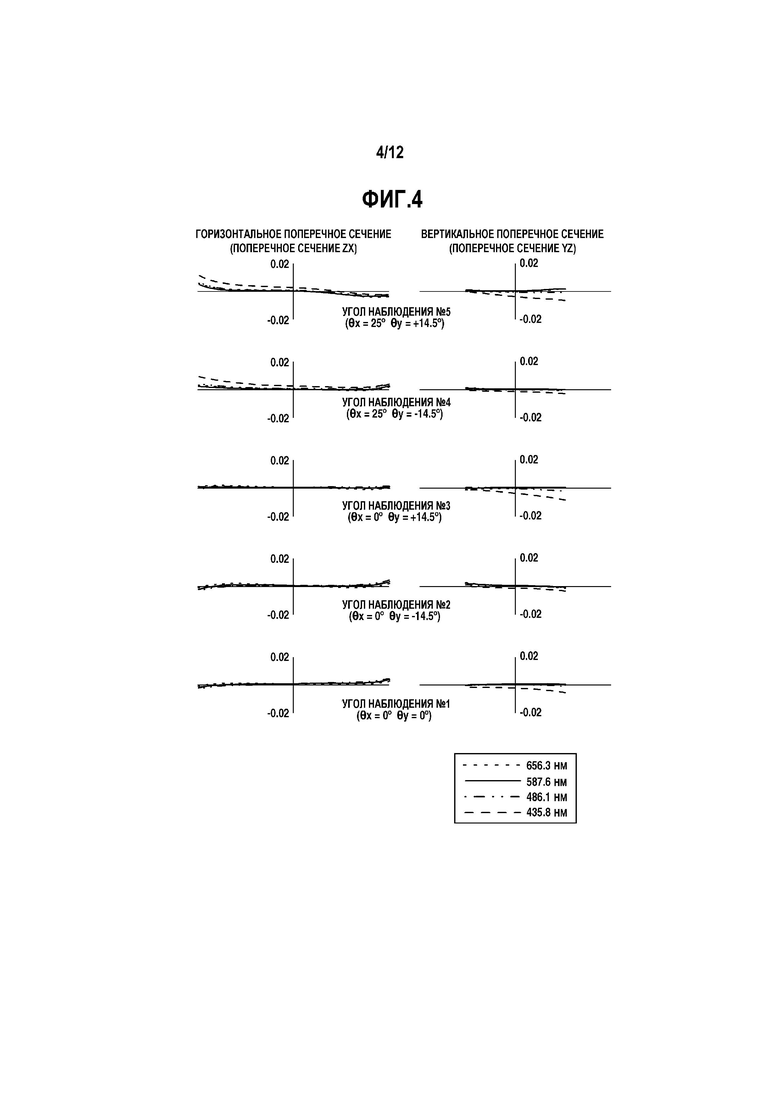
[0010] Фиг. 4 - диаграмма поперечной аберрации оптической системы согласно второму иллюстративному варианту осуществления.
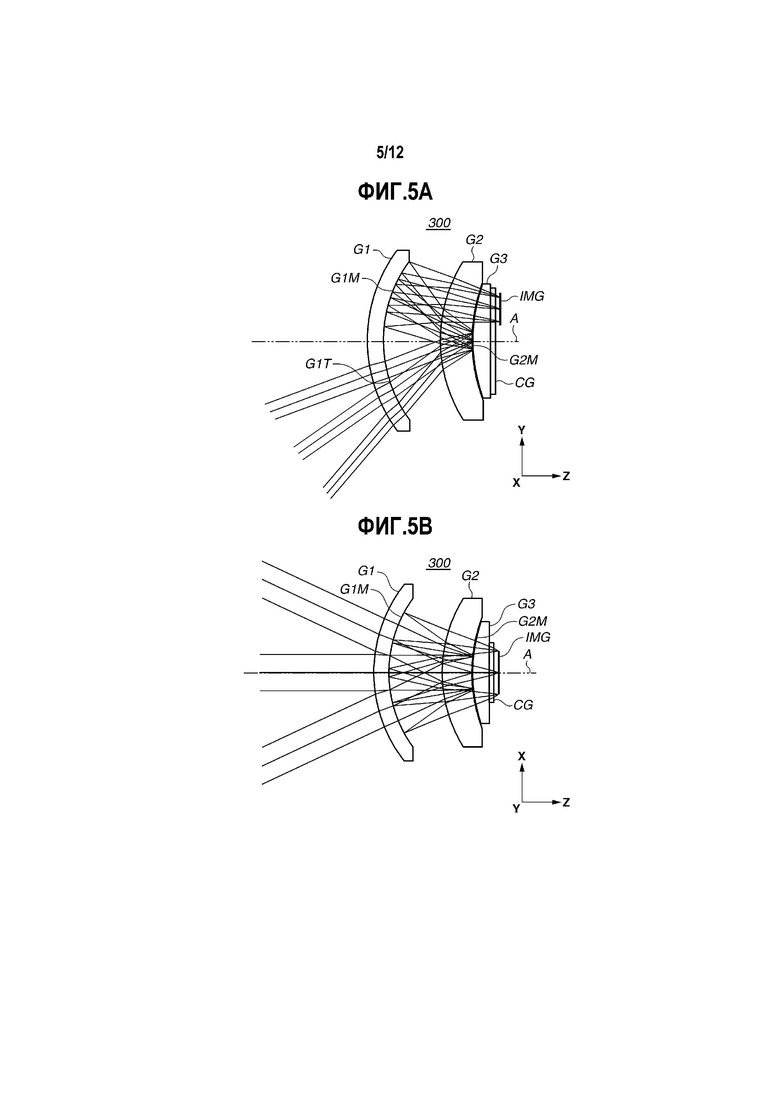
[0011] Фиг. 5A - схема основной части оптической системы согласно третьему иллюстративному варианту осуществления настоящего изобретения (в поперечном сечении YZ). Фиг. 5B - схема основной части оптической системы согласно третьему иллюстративному варианту осуществления настоящего изобретения (при наблюдении со стороны +Y).
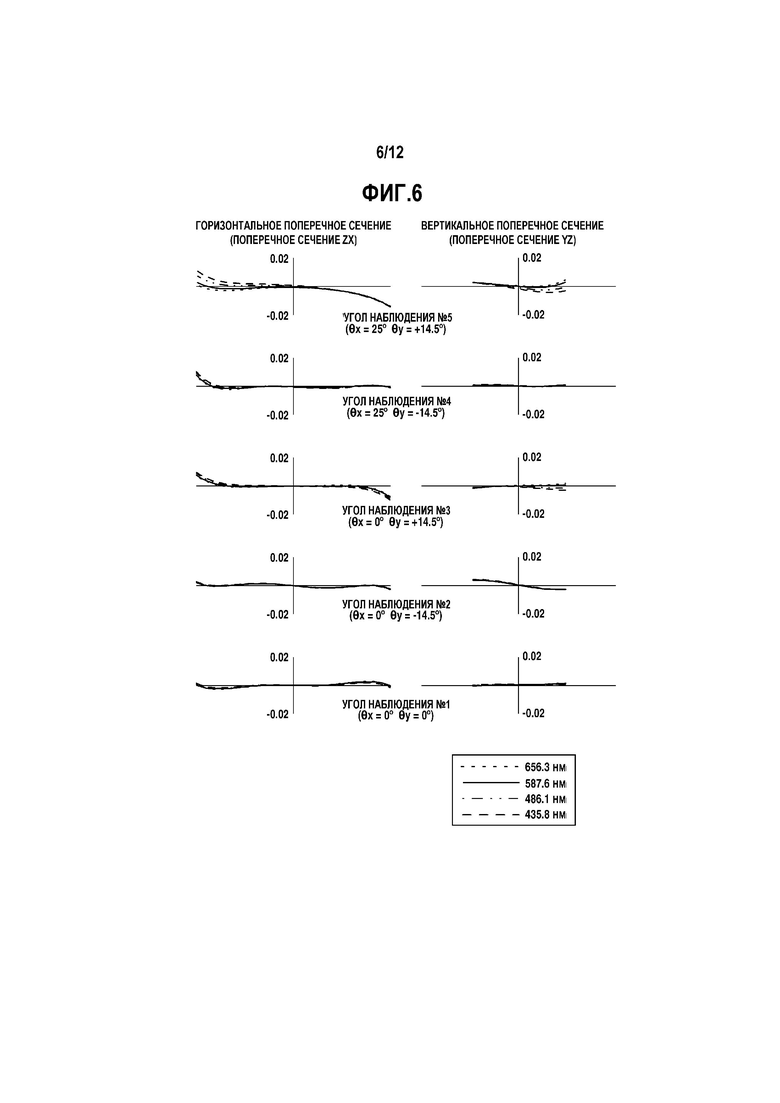
[0012] Фиг. 6 - диаграмма поперечной аберрации оптической системы согласно третьему иллюстративному варианту осуществления.
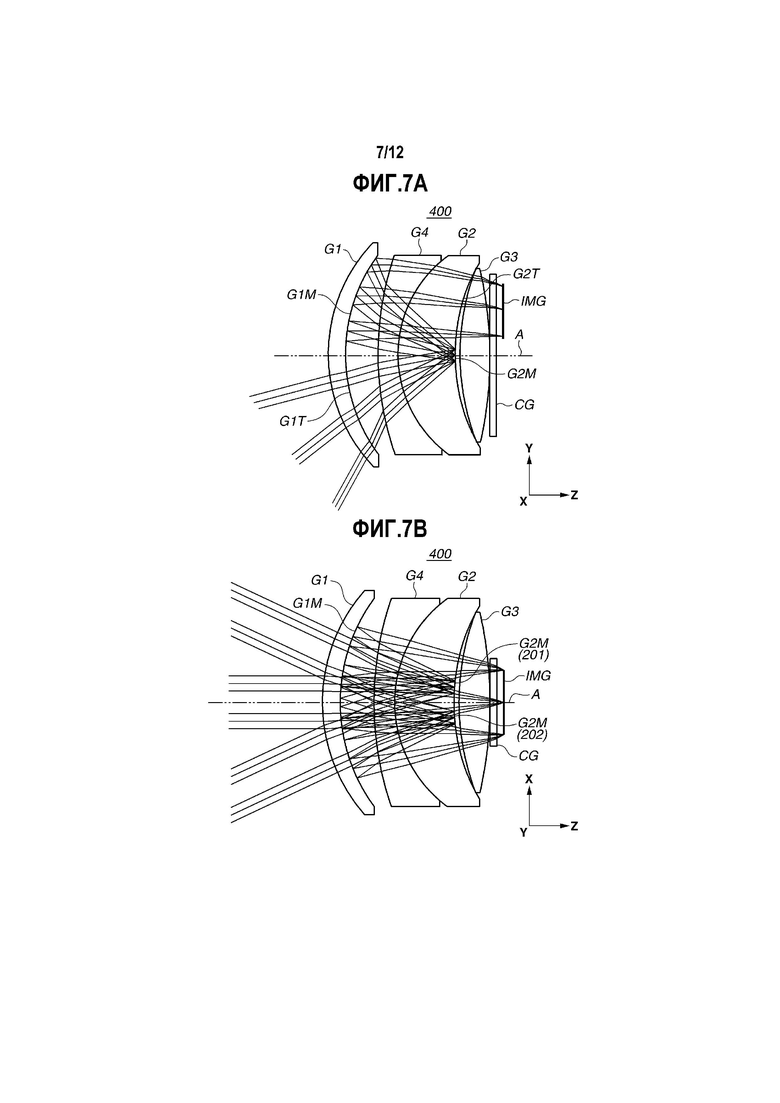
[0013] Фиг. 7A - схема основной части оптической системы согласно четвертому иллюстративному варианту осуществления настоящего изобретения (в поперечном сечении YZ). Фиг. 7B - схема основной части оптической системы согласно четвертому иллюстративному варианту осуществления настоящего изобретения (при наблюдении со стороны +Y).
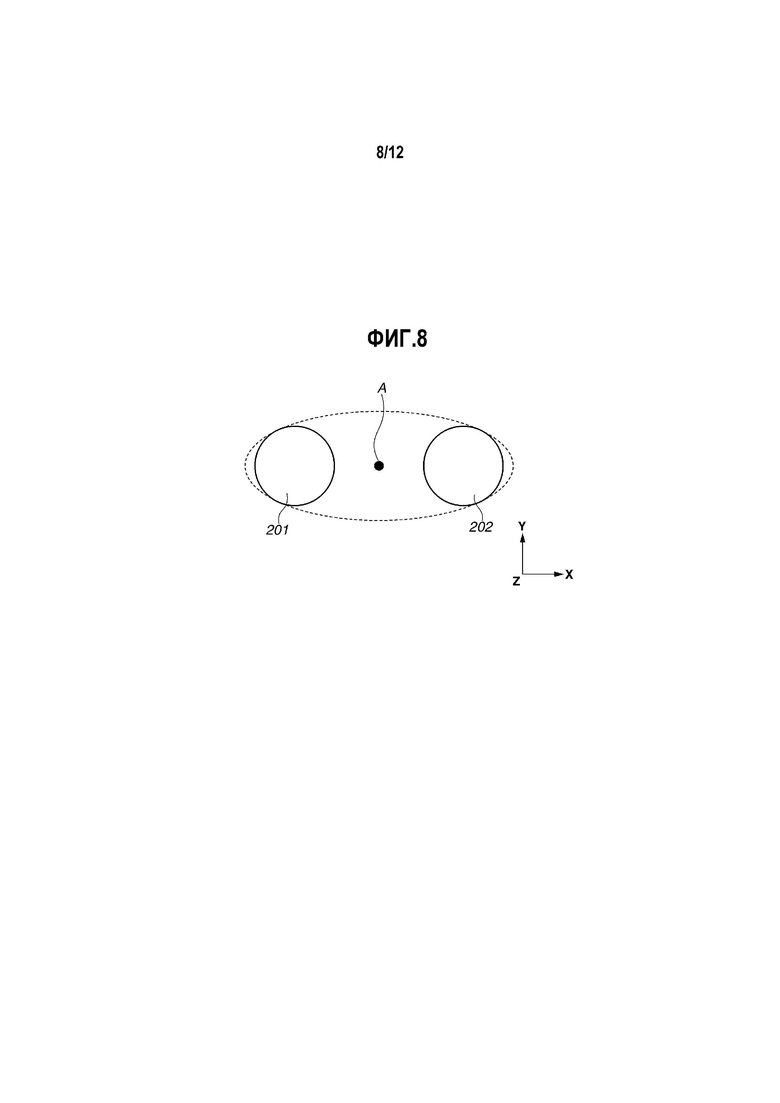
[0014] Фиг. 8 - схема основных частей отражающих частей в оптической системе согласно четвертому иллюстративному варианту осуществления.
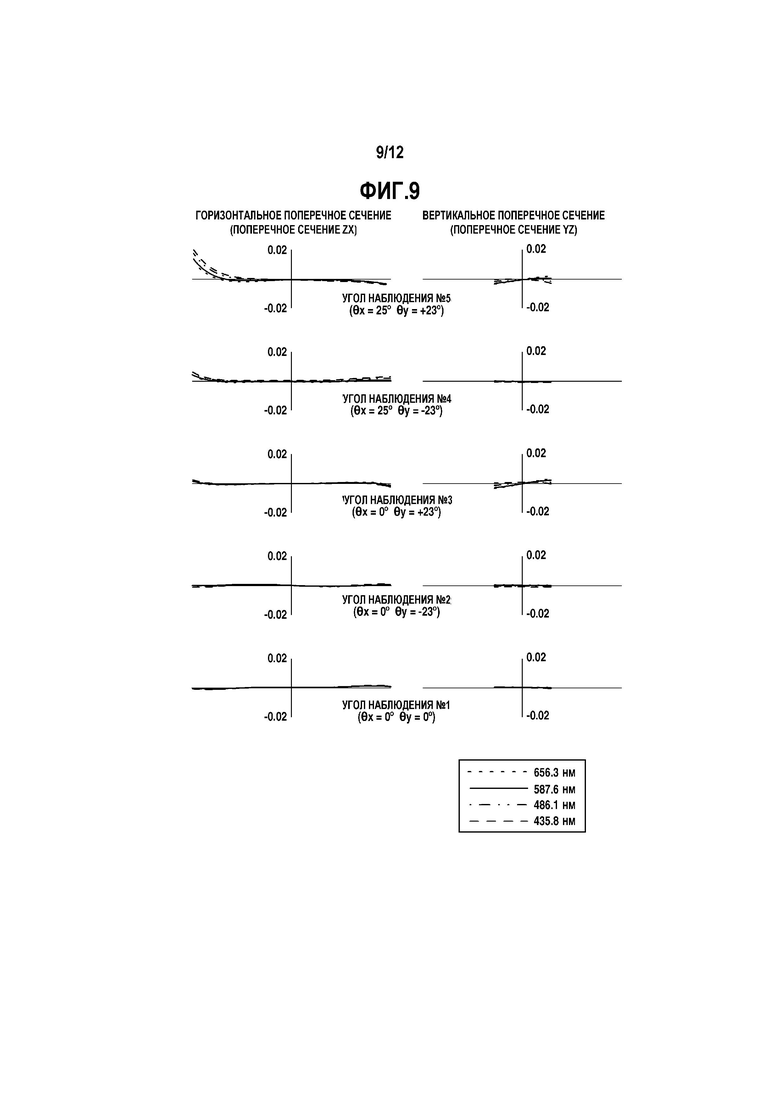
[0015] Фиг. 9 - диаграмма поперечной аберрации оптической системы согласно четвертому иллюстративному варианту осуществления.
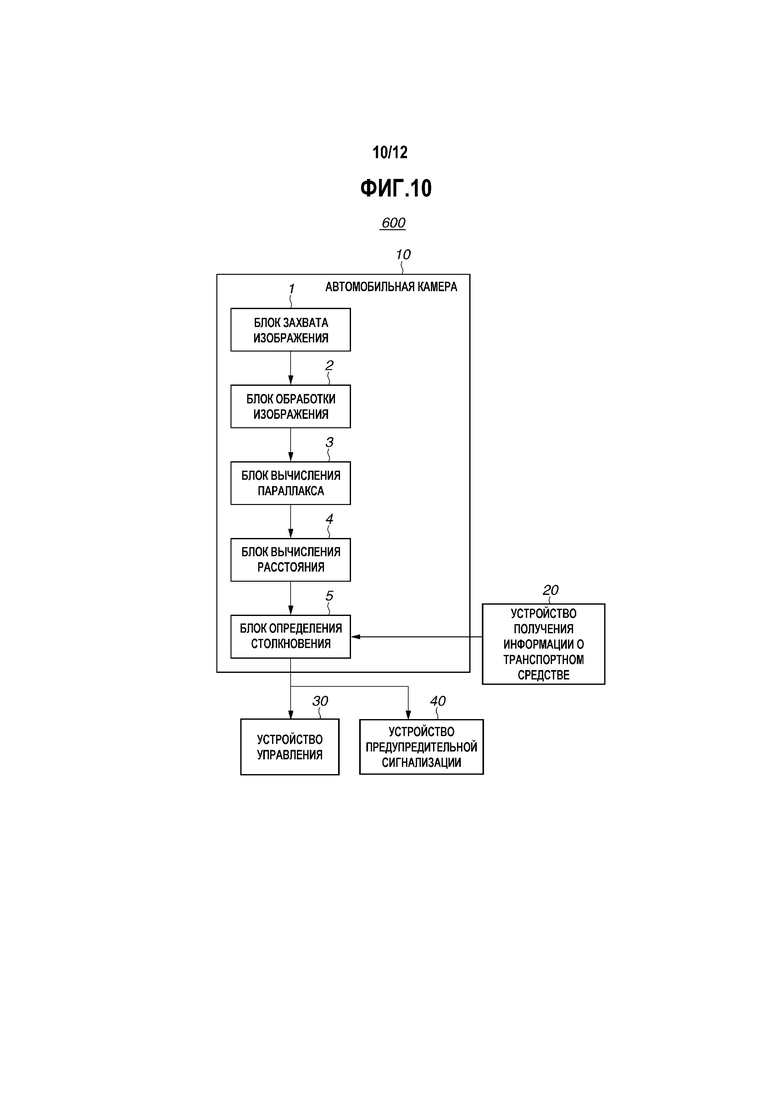
[0016] Фиг. 10 - функциональная блок-схема системы автомобильных камер согласно иллюстративному варианту осуществления настоящего изобретения.
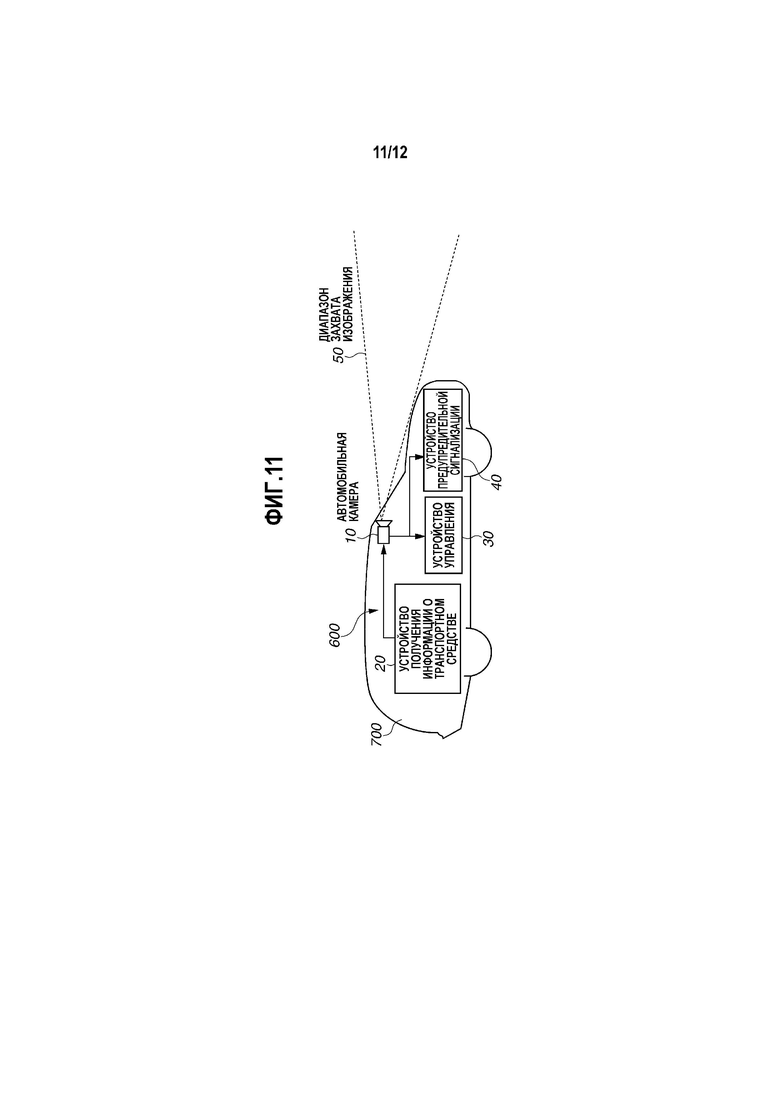
[0017] Фиг. 11 - схема транспортного средства согласно иллюстративному варианту осуществления.
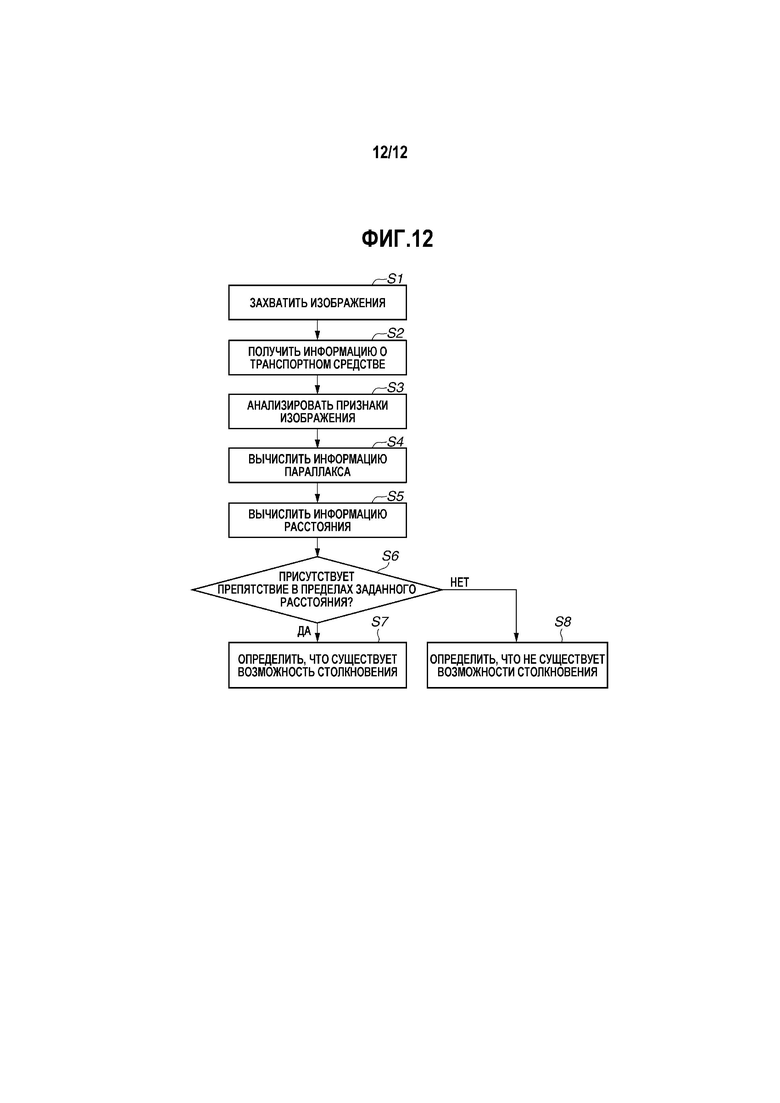
[0018] Фиг. 12 - блок-схема операций, демонстрирующая пример работы системы автомобильных камер согласно иллюстративному варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0019] Ниже, со ссылкой на чертежи, будут описаны желаемые иллюстративные варианты осуществления настоящего изобретения. Каждый из описанных ниже вариантов осуществления настоящего изобретения можно реализовать по отдельности или в виде комбинации нескольких вариантов осуществления или их признаков, когда необходимо или при благоприятной комбинации элементов или признаков из отдельных вариантов осуществления в единственном варианте осуществления. Для удобства, чертежи могут быть выполнены в размерах, отличных от фактических размеров. Кроме того, в чертежах, аналогичные детали обозначены одинаковыми ссылочными позициями, и любые повторные описания будут исключены. В настоящем иллюстративном варианте осуществления, "оптическая поверхность" означает преломляющую поверхность или отражающую поверхность. "Оптическая ось" означает ось, проходящую через центры (вершины поверхности) оптических поверхностей в оптической системе. "Расстояние" означает расстояние до поверхности на оптической оси.
[0020] На фиг. 1A показана схема основной части оптической системы 100 согласно иллюстративному варианту осуществления настоящего изобретения, выполненная в поперечном сечении YZ (вертикальном поперечном сечении), включающем в себя оптическую ось A. На фиг. 1B показана схема основной части оптической системы 100 при наблюдении со стороны +Y в направлении Y (вертикальном направлении). Фиг. 1B иллюстрирует пучок, доходящий до высоты изображения центра в направлении Y. На фиг. 1A и 1B, левая сторона (сторона -Z) является стороной увеличения, и правая сторона (сторона +Z) является стороной уменьшения. Оптическая система 100 согласно настоящему иллюстративному варианту осуществления является оптической системой формирования изображения для сбора пучка от физического тела (объекта) (не показан) для формирования изображения физического тела и применима к устройству захвата изображения или проекционному устройству. В случае, когда оптическая система используется как оптическая система захвата изображения, сторона увеличения является стороной объекта (или стороной физического тела) оптической системы, и сторона уменьшения является стороной изображения (или стороной плоскости изображения) оптической системы. В случае, когда оптическая система используется как проекционная оптическая система, сторона увеличения является стороной изображения оптической системы, и сторона уменьшения является стороной объекта оптической системы.
[0021] В случае, когда оптическая система 100 применяется как оптическая система захвата изображения к устройству захвата изображения, плоскость уменьшения оптической системы 100 является плоскостью изображения, и поверхность формирования изображения (светоприемная поверхность) датчика изображения, например, датчика на приборах с зарядовой связью (CCD) или датчика на комплементарных структурах металл-оксид-полупроводник (CMOS), располагается в позиции плоскости изображения. Кроме того, в случае, когда оптическая система 100 применяется как проекционная оптическая система к проекционному устройству, плоскость уменьшения является плоскостью физического тела, и отображающая поверхность отображающего элемента, например, жидкокристаллической панели (пространственного модулятора), располагается в позиции плоскости физического тела. Таким образом, между оптической системой захвата изображения и проекционной оптической системой, сторона физического тела и сторона изображения меняются местами, и направление оптического пути меняется на противоположное. В нижеследующем описании рассмотрен случай, когда оптическая система 100 применяется к устройству захвата изображения.
[0022] Оптическая система 100 согласно настоящему иллюстративному варианту осуществления является катадиоптрической системой, имеющей первый оптический элемент G1, второй оптический элемент G2 и третий оптический элемент G3. Первый оптический элемент G1 включает в себя первый отражающий участок G1M, который имеет выпуклую форму к стороне увеличения (стороне физического тела). Второй оптический элемент G2 включает в себя поверхность уменьшающей стороны, имеющую выпуклую форму к стороне увеличения. Третий оптический элемент G3 включает в себя поверхность увеличивающей стороны, имеющую выпуклую форму к стороне увеличения. Затем поверхность уменьшающей стороны второго оптического элемента G2 включает в себя второй отражающий участок G2M. Альтернативно, второй отражающий участок G2M может обеспечиваться не на поверхности уменьшающей стороны второго оптического элемента G2, но на поверхности увеличивающей стороны третьего оптического элемента G3.
[0023] При этом, свет от стороны увеличения распространяется к стороне уменьшения (стороне изображения) последовательно через (или сквозь) преломляющий участок G1T первого оптического элемента G1, второй отражающий участок G2M, первый отражающий участок G1M, преломляющий участок G2T второго оптического элемента G2 и преломляющий участок G3T третьего оптического элемента G3 и образует плоскость изображения IMG. Как описано выше, оптическая система 100 включает в себя первый отражающий участок G1M, который является отражающей поверхностью, имеющей положительную оптическую силу (вогнутой отражающей поверхностью), и второй отражающий участок G2M, который является отражающей поверхностью, имеющей отрицательную оптическую силу (выпуклой отражающей поверхностью). Это позволяет уменьшить размеры оптической системы 100 за счет складывания оптического пути и также противодействовать возникновению аберрации. В этом случае, размещение первого отражающего участка G1M и второго отражающего участка G2M аналогично имеющейся в шварцшильдовой оптической системе. Это позволяет обеспечить оптическую систему с малым значением диафрагмы (числом F) и которая является яркой.
[0024] Кроме того, в оптической системе 100 согласно настоящему иллюстративному варианту осуществления, первый оптический элемент G1, включающий в себя вогнутую отражающую поверхность, является катадиоптрическим элементом. Это позволяет уменьшить размеры всей системы багодаря противодействию увеличению количества оптических элементов и также хорошо корректировать аберрацию. Кроме того, третий оптический элемент G3 согласно настоящему иллюстративному варианту осуществления включает в себя преломляющий участок G3T, имеющий положительную оптическую силу. Это позволяет хорошо корректировать аберрацию, например, аберрационную кому, возникающую на преломляющем участке G2T на поверхности уменьшающей стороны второго оптического элемента G2, который имеет второй отражающий участок G2M, который является выпуклой отражающей поверхностью. Таким образом, даже в малоразмерной конфигурации, в которой первый оптический элемент G1 и второй оптический элемент G2 являются катадиоптрическими элементами, можно обеспечить высокую производительность формирования изображения.
[0025] Ниже описана оптическая система 100 согласно первому иллюстративному варианту осуществления настоящего изобретения. Оптическая система 100 согласно настоящему иллюстративному варианту осуществления использует конфигурацию, аналогичную конфигурации оптической системы 100 согласно вышеописанному иллюстративному варианту осуществления, и поэтому повторно не описана. Значения спецификации оптической системы 100 соответствуют первому примеру численного значения, описанному ниже.
[0026] Оптическая система 100 согласно настоящему иллюстративному варианту осуществления включает в себя первый оптический элемент G1, который включает в себя преломляющий участок G1T, имеющий положительную оптическую силу, второй оптический элемент G2, который включает в себя преломляющий участок G2T, имеющий отрицательную оптическую силу, и третий оптический элемент G3, который включает в себя преломляющий участок G3T, имеющий положительную оптическую силу. Кроме того, второй отражающий участок G2M, который обеспечен на поверхности уменьшающей стороны второго оптического элемента G2, функционирует как апертурная диафрагма. Благодаря этой конфигурации, можно гарантировать симметрию размещения оптической силы преломляющих участков перед и за апертурной диафрагмой и хорошо корректировать различные типы аберрации, например, хроматическую аберрацию увеличения.
[0027] В частности, первый оптический элемент G1 согласно настоящему иллюстративному варианту осуществления является положительной менисковой линзой поверхность увеличивающей стороны и поверхность уменьшающей стороны которой имеют выпуклые формы к стороне увеличения, и является катадиоптрическим элементом (катадиоптрической линзовой), имеющим преломляющий участок G1T и первый отражающий участок G1M. Первый отражающий участок G1M согласно настоящему иллюстративному варианту осуществления является зеркалом передней поверхности, обеспеченным на поверхности уменьшающей стороны первого оптического элемента G1, но может быть зеркалом задней поверхности, обеспеченным на поверхности увеличивающей стороны первого оптического элемента G1. Однако, для получения симметрии количества преломлений света перед и за апертурной диафрагмой для коррекции различных типов аберрации, например, хроматической аберрации увеличения, желательно, чтобы первый отражающий участок G1M был зеркалом передней поверхности.
[0028] Второй оптический элемент G2 согласно настоящему иллюстративному варианту осуществления является отрицательной менисковой линзой поверхность увеличивающей стороны и поверхность уменьшающей стороны которой имеют выпуклые формы к стороне увеличения, и является катадиоптрическим элементом, имеющим преломляющий участок G2T и второй отражающий участок G2M. Кроме того, третий оптический элемент G3 согласно настоящему иллюстративному варианту осуществления является двояковыпуклой линзой, имеющей положительную оптическую силу, и является преломляющим элементом (преломляющей линзой), которая не имеет отражающего участка. Формы первого оптического элемента G1, второго оптического элемента G2 и третьего оптического элемента G3 не ограничиваются проиллюстрированными на фиг. 1A и 1B, и могут надлежащим образом изменяться по мере необходимости.
[0029] Затем второй отражающий участок G2M согласно настоящему иллюстративному варианту осуществления включает в себя отражающую часть для отражения эффективного света, участвующего в формировании изображения, и светопреграждающую часть для блокировки света, отличного от эффективного света, и функционирует как апертурная диафрагма. Отражающая часть состоит из отражающей пленки (испаренной пленки), и светопреграждающая часть состоит из светопоглощающей детали. Альтернативно, как описано выше, второй отражающий участок G2M может обеспечиваться на поверхности увеличивающей стороны третьего оптического элемента G3. В этом случае, второй оптический элемент G2 является преломляющим элементом, и третий оптический элемент G3 является катадиоптрическим элементом.
[0030] В случае, когда второй отражающий участок G2M обеспечен на поверхности увеличивающей стороны третьего оптического элемента G3, существует возможность возникновения аберрации, когда свет излучается от поверхности уменьшающей стороны второго оптического элемента G2. Таким образом, желательно обеспечивать второй отражающий участок G2M на поверхности уменьшающей стороны второго оптического элемента G2 согласно настоящему иллюстративному варианту осуществления. В случае, когда второй отражающий участок G2M обеспечен на поверхности увеличивающей стороны третьего оптического элемента G3, желательно соединять поверхность уменьшающей стороны второго оптического элемента G2 и поверхность увеличивающей стороны третьего оптического элемента G3 или делать каждую поверхность асферической, для противодействия возникновению вышеупомянутой аберрации.
[0031] Свет от физического тела (не показан) падает на поверхность увеличивающей стороны первого оптического элемента G1, проходит через преломляющий участок G1T на поверхности уменьшающей стороны первого оптического элемента G1 и преломляющий участок G2T на поверхности увеличивающей стороны второго оптического элемента G2, и отражается отражающей частью второго отражающего участка G2M. В этом случае, часть света блокируется светопреграждающей частью второго отражающего участка G2M.
[0032] Свет, отраженный отражающей частью второго отражающего участка G2M, проходит через поверхность увеличивающей стороны второго оптического элемента G2 и отражается первым отражающим участком G1M на поверхности уменьшающей стороны первого оптического элемента G1. свет, отраженный первым отражающим участком G1M, снова падает на поверхность увеличивающей стороны второго оптического элемента G2, проходит через преломляющий участок G2T второго оптического элемента G2 и преломляющий участок G3T третьего оптического элемента G3, и образует плоскость изображения IMG, которая имеет плоскую форму, через оптический блок CG. Оптический блок CG является оптическим элементом, соответствующим покровному стеклу или оптическому фильтру, и не имеющим оптической силы.
[0033] Как показано на фиг. 1B, в направлении X (горизонтальном направлении), оптическая система 100 имеет симметричную форму относительно оптическую ось A, и свет от стороны увеличения падает на первый оптический элемент G1 от обеих сторон относительно оптической оси A. Таким образом, в поперечном сечении ZX (горизонтальном поперечном сечении) в каждой позиции в направлении Y, оптическая система 100 имеет симметричную форму относительно оптической оси A. При этом, также в вертикальном поперечном сечении, представленном на фиг. 1A, оптическая система 100 имеет симметричную форму относительно оптической оси A. Однако, свет от стороны увеличения падает на первый оптический элемент G1 только от нижней стороны (стороны -Y) относительно оптической оси A, и плоскость изображения IMG формируется на верхней стороне (стороне +Y) относительно оптической оси A. Как описано выше, оптическая система 100 использует конфигурацию, в которой в вертикальном поперечном сечении, свет падает на первый оптический элемент G1 только от одной стороны относительно оптической оси A, т.е. свет наклонно падает на каждую оптическую поверхность.
[0034] При этом, устройство захвата изображения может быть сконфигурировано таким образом, что поверхность формирования изображения является эксцентрической в направлении Y относительно оптической оси A, для приема только пучка, падающего на оптическую систему 100 с противоположной стороны поверхности формирования изображения относительно оптической оси A. Кроме того, проекционное устройство может быть сконфигурировано таким образом, что отображающая поверхность является эксцентрической в направлении Y относительно оптической оси A, для излучения пучка от отображающей поверхности, с противоположной стороны отображающей поверхности относительно оптической оси A наружу оптической системы 100. Это позволяет уменьшить размеры оптической системы 100 за счет складывания оптического пути и также помещать датчик изображения или отображающий элемент, чтобы они не создавали помех для оптических элементов или оптических путей.
[0035] Угол наблюдения в горизонтальном поперечном сечении, включающем в себя оптическую ось A (горизонтальный угол наблюдения) оптической системы 100 согласно настоящему иллюстративному варианту осуществления равен 50°. Когда сторона +X является положительной, и сторона -X является отрицательной с использованием оптической оси A в качестве начала отсчета (0°), диапазон угла θx в горизонтальном угле наблюдения составляет -25°≤θx≤+25°. Кроме того, угол наблюдения в вертикальном поперечном сечении, включающий в себя оптическую ось A (вертикальный угол наблюдения) оптической системы 100 равен 29°. Когда сторона +Y является положительной, и сторона -Y является отрицательной с использованием, в качестве начала отсчета (0°), луча (центрального луча), достигающего высоты изображения центра среди лучей, падающих на поверхность увеличивающей стороны первого оптического элемента G1, диапазон угла θy в вертикальном угле наблюдения составляет -14,5°≤θy≤+14,5°. Угол между центральным лучом и оптической осью A равен 40°.
[0036] В оптической системе 100 согласно настоящему иллюстративному варианту осуществления, горизонтальный угол наблюдения устанавливается симметрично по обе стороны относительно оптической оси A, тогда как вертикальный угол наблюдения устанавливается только на стороне -Y относительно оптической оси A. Затем, в оптической системе 100, угол наблюдения в вертикальном поперечном сечении (втором поперечном сечении), включающем в себя оптическую ось и перпендикулярном горизонтальному поперечному сечению, меньше, чем угол наблюдения в горизонтальном поперечном сечении (первом поперечном сечении), включающем в себя оптическую ось. Кроме того, оптическая система 100 согласно настоящему иллюстративному варианту осуществления является коаксиальной системой, в которой вершины поверхности и центры кривизны всех оптических поверхностей присутствуют на оптической оси A, и также является поворотно-симметричной системой, в которой все оптические поверхности имеют поворотно-симметричные формы относительно оптической оси A. Оптическая система 100, таким образом, является коаксиальной системой и поворотно-симметричной системой, что позволяет хорошо корректировать различные типы аберрации в каждом из горизонтальном поперечном сечении и вертикальном поперечном сечении.
[0037] В настоящем иллюстративном варианте осуществления, среда между первым оптическим элементом G1 и вторым оптическим элементом G2 является материалом, имеющим показатель преломления, меньший, чем у второго оптического элемента G2. Следовательно, на поверхности увеличивающей стороны второго оптического элемента G2, угол преломления света, преломленного на нижней стороне относительно оптической оси A, и угол преломления света, преломленного на верхней стороне относительно оптической оси A, могут быть эквивалентны друг другу. Это позволяет хорошо корректировать аберрационную кому, хроматическую аберрацию увеличения и дисторсию.
[0038] Участок на нижней стороне относительно оптической оси A на поверхности увеличивающей стороны второго оптического элемента G2 имеет выпуклую форму к свету, падающему от стороны увеличения и поэтому преломляет свет, проходящий через позицию, отдаленную от оптической оси A, больше, чем свет, проходящий вблизи оптической оси A. Таким образом, углы пучков света, падающих на участок на нижней стороне на поверхности увеличивающей стороны второго оптического элемента G2, не являются однородными, и возникают аберрационная кома, хроматическая аберрация увеличения и дисторсия. С другой стороны, участок на верхней стороне относительно оптической оси A на поверхности увеличивающей стороны второго оптического элемента G2 имеет вогнутую форму к свету, излучаемому к первому оптическому элементу G1, и поэтому преломляет свет, проходящий через позицию, отдаленную от оптической оси A, больше, чем свет, проходящий вблизи оптической оси A.
[0039] На оптических путях между участком на нижней стороне и участку на верхней стороне на поверхности увеличивающей стороны второго оптического элемента G2 располагается второй отражающий участок G2M. Таким образом, размещение лучей в пучке (велико или мало расстояние от оптической оси A) противоположно между случаями, когда свет падает на участок на нижней стороне и когда свет излучается от участка на верхней стороне. Таким образом, на участке на верхней стороне на поверхности увеличивающей стороны второго оптического элемента G2, оптическая система 100 согласно настоящему иллюстративному варианту осуществления может подавлять аберрационную кому, хроматическую аберрацию увеличения и дисторсию, возникшие на участке на нижней стороне на поверхности увеличивающей стороны второго оптического элемента G2.
[0040] В этом случае, для обеспечения достаточной разности показателей преломления между вторым оптическим элементом G2 и средой, желательно сделать показатель преломления среды как можно меньшим. В частности, более желательно, чтобы среда была воздухом согласно настоящему иллюстративному варианту осуществления. Альтернативно, другой оптический элемент может располагаться между первым оптическим элементом G1 и вторым оптическим элементом G2 по мере необходимости. В этом случае, однако, желательно помещать среду, имеющую малый показатель преломления, например, воздух, между первым оптическим элементом G1 и оптическим элементом, соседствующим первому оптическому элементу G1.
[0041] Как описано выше, второй отражающий участок G2M согласно настоящему иллюстративному варианту осуществления является отражающей поверхностью, имеющей выпуклую форму, и также имеет функцию апертурной диафрагмы. Таким образом, второй отражающий участок G2M, имеющий отрицательную оптическую силу, является апертурной диафрагмой, что позволяет снижать влияние на кривизну поля или астигматизм и также хорошо корректировать сферическую аберрацию. Кроме того, второй отражающий участок G2M имеет отрицательную оптическую силу, что позволяет надлежащим образом гарантировать расстояние между первым отражающим участком G1M и плоскостью изображения IMG, и легко избежать помехи между оптической системой 100 и датчиком изображения или отображающим элементом. В настоящем иллюстративном варианте осуществления, второй отражающий участок G2M имеет такую асферическую поверхность, что, что чем больше она отстоит от оптической оси A, тем меньше ее оптическая сила, что позволяет лучше корректировать сферическую аберрацию.
[0042] Кроме того, отражающая часть второго отражающего участка G2M согласно настоящему иллюстративному варианту осуществления имеет эллиптическую форму. Затем большая ось эллипса параллельна горизонтальному поперечному сечению, и малая ось эллипса параллельна вертикальному поперечному сечению. Другими словами, диаметр в первом направлении (горизонтальном направлении), перпендикулярном оптической оси A, отражающей части второго отражающего участка G2M больше, чем диаметр во втором направлении (вертикальном направлении), перпендикулярном оптической оси A, и первом направлении, отражающей части. В частности, значение диафрагмы оптической системы 100 согласно настоящему иллюстративному варианту осуществления равно F=1,2 в горизонтальном направлении (направлении X) и F=3,0 в вертикальном направлении (направлении Y).
[0043] Таким образом, значение диафрагмы оптической системы 100 согласно настоящему иллюстративному варианту осуществления устанавливается большим (более темным) в вертикальном поперечном сечении, в котором угол наблюдения оптической системы 100 асимметричен относительно оптической оси A, чем в горизонтальном поперечном сечении, в котором угол наблюдения оптической системы 100 симметричен относительно оптической оси A. Это позволяет повысить яркость и разрешение в горизонтальном поперечном сечении и также облегчить избежание помехи с оптическими путями путем сужения пучка в вертикальном поперечном сечении. Это позволяет повысить степень свободы в размещении оптических поверхностей. Отражающая часть второго отражающего участка G2M не ограничивается эллиптической формой, и может иметь прямоугольную форму по мере необходимости.
[0044] Первый отражающий участок G1M согласно настоящему иллюстративному варианту осуществления, в основном, функционирует для коррекции кривизны поля. В общем случае, для коррекции кривизны поля в оптической системе, оптическая система сконструирована таким образом, чтобы сумма Петцваля оптических поверхностей была мала за счет смещения положительной оптической силы и отрицательной оптической силы относительно друг друга, благодаря чему, поверхность Петцваля уплощается. Напротив, в оптической системе 100 согласно настоящему иллюстративному варианту осуществления, кривизна поля корректируется путем надлежащего установления сагиттальной величины первого отражающего участка G1M первого оптического элемента G1. Это подробно описано ниже.
[0045] Оптическая система 100 согласно настоящему иллюстративному варианту осуществления имеет положительную оптическую силу в целом. Таким образом, когда изображение формируется вблизи плоскости изображения IMG, поверхности Петцваля свойственно иметь такую искривленную форму, что по мере приближения к периферийной части от оптической оси A, смещение к стороне увеличения возрастает. При этом первый отражающий участок G1M имеет вогнутую форму, т.е. такую форму, что по мере приближения к периферийной части от оптической оси A, смещение к стороне уменьшения возрастает. Таким образом, по мере приближения к периферийной части от оптической оси A, расстояние между первым отражающим участком G1M и плоскостью изображения IMG уменьшается.
[0046] Таким образом, благодаря разностям оптических путей между высотами изображения, порождаемыми первым отражающим участком G1M, можно хорошо корректировать кривизну поля в оптической системе 100. Кроме того, первый отражающий участок G1M является асферической поверхностью, благодаря чему, компонент асферической поверхности первого отражающего участка G1M, позволяет корректировать кривизну поля, которую нельзя было бы в достаточной степени скорректировать, если бы первый отражающий участок G1M являлся сферической поверхностью. Это позволяет повысить степень свободы в назначении сагиттальной величины первого отражающего участка G1M. Это позволяет лучше корректировать кривизну поля.
[0047] Для коррекции кривизны поля в оптической системе, в общем случае, асферическая поверхность сконфигурирована таким образом, что оптическая сила меньше в периферийной части, чем на оптической оси. С другой стороны, в настоящем иллюстративном варианте осуществления, в отличие от общей оптической системы, кривизна поля корректируется сагиттальной величиной первого отражающего участка G1M. Таким образом, величина асферической поверхности первого отражающего участка G1M устанавливается таким образом, что оптическая сила больше в периферийной части, чем на оптической оси A.
[0048] В настоящем иллюстративном варианте осуществления, преломляющий участок G1T и первый отражающий участок G1M в первом оптическом элементе G1, позволяет хорошо корректировать аберрацию как описано выше. В этом случае, преломляющий участок G1T и первый отражающий участок G1M обеспечены в единственном оптическом элементе, что позволяет противодействовать увеличению количества оптических элементов и возникновению ошибки в относительном размещении оптических элементов по сравнению со случаем, когда преломляющий участок G1T и первый отражающий участок G1M обеспечены в оптических элементах, отличающихся друг от друга. Тогда первый оптический элемент G1 является положительной менисковой линзой, в которой выпуклая поверхность ориентирована к стороне увеличения, благодаря чему, преломляющий участок G1T позволяет хорошо корректировать хроматическую аберрацию увеличения также в случае, когда оптическая система 100 имеет широкий угол.
[0049] Как описано выше, третий оптический элемент G3 согласно настоящему иллюстративному варианту осуществления имеет положительную оптическую силу, таким образом, хорошо корректируя различные типы аберрации, например, аберрационную кому, возникающие на преломляющем участке G2T на поверхности уменьшающей стороны второго оптического элемента G2, который имеет второй отражающий участок G2M, который является выпуклой отражающей поверхностью. При этом, желательно, чтобы поверхность уменьшающей стороны третьего оптического элемента G3 должны иметь вогнутую форму к стороне увеличения согласно настоящему иллюстративному варианту осуществления. Наиболее удаленная оптическая поверхность, расположенная на стороне уменьшения (последняя поверхность) в оптической системе 100, является преломляющей поверхностью, имеющей вогнутую форму к стороне увеличения, что позволяет хорошо корректировать кривизну поля или астигматизм, которую(ый) нельзя было бы в достаточной степени скорректировать другими оптическими поверхностями. Альтернативно, поверхность уменьшающей стороны третьего оптического элемента G3 может иметь выпуклую форму к стороне увеличения по мере необходимости. В этом случае, однако, желательно дополнительно помещать преломляющую поверхность, имеющую вогнутую форму к стороне увеличения, дальше на стороне уменьшения, чем третий оптический элемент G3.
[0050] Желательно, чтобы выполнялось следующее условное выражение (1), где суммарная толщина оптических элементов, присутствующих между первым отражающим участком G1M и вторым отражающим участком G2M, равна Lg, и расстояние между оптической поверхностью, включающей в себя первый отражающий участок G1M, и оптической поверхностью, включающей в себя второй отражающий участок G2M, равно Lm. В этом случае, толщина указывает толщину на оптической оси A. В настоящем иллюстративном варианте осуществления, толщина второго оптического элемента G2 равна Lg, и расстояние между поверхностью уменьшающей стороны первого оптического элемента G1 и поверхностью уменьшающей стороны второго оптического элемента G2 равно Lm.
0,3≤Lg/Lm≤0,95 (1)
[0051] Если Lg/Lm падает ниже нижнего предела условного выражения (1), свет преломляется в части вблизи оптической оси A на преломляющей поверхности, присутствующей между первым отражающим участком G1M и вторым отражающим участком G2M. Таким образом, трудно хорошо корректировать хроматическую аберрацию увеличения. Кроме того, если Lg/Lm превышает верхний предел условного выражения (1), расстояние между оптическими поверхностями, присутствующими между первым отражающим участком G1M и вторым отражающим участком G2M, становится слишком малым. Таким образом, невозможно в достаточной степени преломлять свет, и трудно хорошо корректировать хроматическую аберрацию увеличения. Кроме того, более желательно, чтобы выполнялось следующее условное выражение (1a).
0,32≤Lg/Lm≤0,90 (1a)
[0052] Кроме того, желательно, чтобы выполнялось следующее условное выражение (2), где радиус кривизны оптической поверхности, включающей в себя первый отражающий участок G1M равен Rp, и радиус кривизны оптической поверхности, включающей в себя второй отражающий участок G2M равен Rn. В настоящем иллюстративном варианте осуществления, радиус кривизны поверхности уменьшающей стороны первого оптического элемента G1 равен Rp, и радиус кривизны поверхности уменьшающей стороны второго оптического элемента G2 равен Rn.
0,7≤Rp/Rn≤1,3 (2)
[0053] В оптической системе 100 согласно настоящему иллюстративному варианту осуществления, для противодействия возникновению хроматической аберрации, первый отражающий участок G1M и второй отражающий участок G2M имеют относительно высокую оптическую силу. Таким образом, условное выражение (2) выполняется, что позволяет сделать сумму Петцваля оптической системы 100, малой для противодействия возникновению кривизны поля. Если Rp/Rn выпадает из диапазона условного выражения (2), сумма Петцваля оптической системы 100 увеличивается. Таким образом, трудно в достаточной степени противодействовать возникновению кривизны поля. Кроме того, более желательно, чтобы выполнялось следующее условное выражение (2a).
0,75≤Rp/Rn≤1,2 (2a)
[0054] Кроме того, желательно, чтобы выполнялось следующее условное выражение (3), где радиус кривизны ближайшей преломляющей поверхности, которая является ближайшей к первому оптическому элементу G1 из преломляющих поверхностей, расположенных на стороне уменьшения первого оптического элемента G1, равен R1, и расстояние между ближайшей преломляющей поверхностью и оптической поверхностью, включающей в себя второй отражающий участок G2M равно L1. В настоящем иллюстративном варианте осуществления, радиус кривизны поверхности увеличивающей стороны второго оптического элемента G2 (например, ближайшей преломляющей поверхности) равен R1, и расстояние между поверхностью увеличивающей стороны и поверхностью уменьшающей стороны второго оптического элемента G2 равно L1.
2,0≤R1/L1≤5,5 (3)
[0055] Если R1/L1 падает ниже нижнего предела условного выражения (3), угол падения внеосевого пучка на ближайшей преломляющей поверхности к первому оптическому элементу G1 дальше на стороне уменьшения, чем первый оптический элемент G1, становится слишком малым, и главный луч внеосевого пучка не преломляется в достаточной степени. Таким образом, необходимо сделать первый оптический элемент G1 большим, когда оптическая система 100 имеет широкий угол, и поэтому, трудно уменьшить размеры всей системы. Кроме того, если R1/L1 превышает верхний предел условного выражения (3), угол падения внеосевого пучка на ближайшей преломляющей поверхности к первому оптическому элементу G1 дальше на стороне уменьшения, чем первый оптический элемент G1, становится слишком большим. Таким образом, трудно хорошо корректировать хроматическую аберрацию увеличения или астигматизм. Кроме того, более желательно, чтобы выполнялось следующее условное выражение (3a).
2,5≤R1/L1≤5,0 (3a)
[0056] В нижеследующей таблице 1 приведены значения условных выражений, касающихся оптический системы 100, согласно настоящему иллюстративному варианту осуществления. Как показано в таблице 1, оптическая система 100 удовлетворяет всем вышеприведенным условным выражениям.
[0057] На фиг. 2 показана диаграмма поперечной аберрации оптической системы 100 согласно настоящему иллюстративному варианту осуществления. Фиг. 2 иллюстрирует поперечную аберрацию на каждой из C-линии (длина волны 656,3 нм), d-линии (длина волны 587,6 нм), F-линии (длина волны 486,1 нм) и g-линии (длина волны 435,8 нм) при пяти углах наблюдения оптической системы 100. Численное значение поперечной аберрации измеряется в мм. Как можно видеть из фиг. 2, аберрационная кома и хроматическая аберрация увеличения хорошо корректируются. Кроме того, относительное отверстие (виньетирование) оптической системы 100 равно 100% при всех углах наблюдения, и поэтому, механическое виньетирование не происходит благодаря второму отражающему участку G2M. Таким образом, обеспечивается оптическая система, которая является яркой от осевой части к внеосевой части.
[0058] Как описано выше, на основании оптической системы 100 согласно настоящему иллюстративному варианту осуществления, можно обеспечить оптическую систему, которая имеет малые размеры, но высокую производительность формирования изображения.
[0059] Ниже описана оптическая система 200 согласно второму иллюстративному варианту осуществления настоящего изобретения. В оптической системе 200 согласно настоящему иллюстративному варианту осуществления, компоненты, эквивалентные компонентам оптической системы 100 согласно первому иллюстративному варианту осуществления, здесь не описаны. Значения спецификации оптической системы 200 соответствуют второму описанному ниже примеру численного значения.
[0060] На фиг. 3A показана схема основной части оптической системы 200 согласно настоящему иллюстративному варианту осуществления, вдоль поперечного сечения YZ, включающего в себя оптическую ось A. На фиг. 3B показана схема основной части оптической системы 200 при наблюдении со стороны +Y в направлении Y. Оптическая система 200 согласно настоящему иллюстративному варианту осуществления отличается от оптической системы 100 согласно первому иллюстративному варианту осуществления тем, что первый отражающий участок G1M обеспечен на поверхности увеличивающей стороны первого оптического элемента G1, второй оптический элемент G2 и третий оптический элемент G3 соединены друг с другом, и второй отражающий участок G2M обеспечен на этой поверхности соединения.
[0061] Первый отражающий участок G1M является зеркалом задней поверхности в настоящем иллюстративном варианте осуществления, что позволяет снижать ухудшение благодаря отслаиванию отражающей пленки (испаренной пленки) или флуктуации окружающей среды, и повышать устойчивость к воздействию окружающей среды. Кроме того, второй оптический элемент G2 и третий оптический элемент G3 соединены друг с другом в настоящем иллюстративном варианте осуществления, что позволяет противодействовать возникновению полного отражения или аберрации на границе раздела между оптическими элементами, и снижению производительности формирования изображения благодаря относительному позиционному сдвигу оптических элементов.
[0062] В оптической системе 200 согласно настоящему иллюстративному варианту осуществления, горизонтальный угол наблюдения равен 50°, вертикальный угол наблюдения равен 29°, угол между центральным лучом и оптической осью A в горизонтальном поперечном сечении равен 35°, значение диафрагмы в горизонтальном направлении равно 1,4, и значение диафрагмы в вертикальном направлении равно 2,7. Кроме того, как показано в таблице 1 ниже, оптическая система 200 удовлетворяет всем вышеприведенным условным выражениям.
[0063] На фиг. 4 показана диаграмма поперечной аберрации оптической системы 200 согласно настоящему иллюстративному варианту осуществления. Как можно видеть из фиг. 4, аберрационная кома и хроматическая аберрация увеличения хорошо корректируются. Кроме того, относительное отверстие оптической системы 200 равно 100% при всех углах наблюдения. Таким образом, обеспечивается оптическая система, которая является яркой от осевой части к внеосевой части.
[0064] Оптическая система 300 согласно третьему иллюстративному варианту осуществления настоящего изобретения описан ниже. В оптической системе 300 согласно настоящему иллюстративному варианту осуществления, компоненты, эквивалентные компонентам оптической системы 100 согласно первому иллюстративному варианту осуществления, здесь не описаны. Значения спецификации оптической системы 300 соответствуют описанному ниже третьему примеру численного значения.
[0065] На фиг. 5A показана схема основной части оптической системы 300 согласно настоящему иллюстративному варианту осуществления, вдоль поперечного сечения YZ, включающего в себя оптическую ось A. На фиг. 5B показана схема основной части оптической системы 300 при наблюдении со стороны +Y в направлении Y. Оптическая система 300 согласно настоящему иллюстративному варианту осуществления отличается от оптической системы 100 согласно первому иллюстративному варианту осуществления тем, что второй отражающий участок G2M обеспечен на поверхности увеличивающей стороны третьего оптического элемента G3.
[0066] В оптической системе 300 согласно настоящему иллюстративному варианту осуществления, горизонтальный угол наблюдения равен 50°, вертикальный угол наблюдения равен 29°, угол между центральным лучом и оптической осью A в горизонтальном поперечном сечении равен 35°, значение диафрагмы в горизонтальном направлении равно 1,4, и значение диафрагмы в вертикальном направлении равно 3,1. Кроме того, как показано в таблице 1 ниже, оптическая система 300 удовлетворяет всем вышеприведенным условным выражениям.
[0067] На фиг. 6 показана диаграмма поперечной аберрации оптической системы 300 согласно настоящему иллюстративному варианту осуществления. Как можно видеть из фиг. 6, аберрационная кома и хроматическая аберрация увеличения хорошо корректируются. Кроме того, относительное отверстие оптической системы 300 равно 100% при всех углах наблюдения. Таким образом, обеспечивается оптическая система, которая является яркой от осевой части к внеосевой части.
[0068] Оптическая система 400 согласно четвертому иллюстративному варианту осуществления настоящего изобретения описан ниже. В оптической системе 400 согласно настоящему иллюстративному варианту осуществления, компоненты, эквивалентные компонентам оптической системы 100 согласно первому иллюстративному варианту осуществления, здесь не описаны. Значения спецификации оптической системы 400 соответствуют четвертому описанному ниже примеру численного значения.
[0069] На фиг. 7A показана схема основной части оптической системы 400 согласно настоящему иллюстративному варианту осуществления, вдоль поперечного сечения YZ, включающего в себя оптическую ось A. На фиг. 7B показана схема основной части оптической системы 400 при наблюдении со стороны +Y в направлении Y. Оптическая система 400 согласно настоящему иллюстративному варианту осуществления отличается от оптической системы 100 согласно первому иллюстративному варианту осуществления тем, что четвертый оптический элемент G4 располагается между первым оптическим элементом G1 и вторым оптическим элементом G2, и две отражающие части обеспечены на втором отражающем участке G2M. Как показано на фиг. 7B, оптическая система 400 использует конфигурацию, в которой зрачок делится на две части в горизонтальном поперечном сечении двумя отражающими частями. Следовательно, оптическая система 400 может использоваться как оптическая система измерения расстояния.
[0070] На фиг. 8 показана схема основных частей отражающих частей второго отражающего участка G2M при наблюдении со стороны -Z в направлении Z в оптической системе 400. На фиг. 8 сплошные линии указывают отражающие части второго отражающего участка G2M, и пунктирная линия указывает эффективный участок, соответствующий части, где аберрация в оптической системе 400 в достаточной степени корректируется, и получается высокая производительность формирования изображения. Другими словами, пунктирная линия на фиг. 8 указывает отражающую часть, когда предполагается, что оптическая система 400 используется не как оптическая система измерения расстояния, но как нормальная оптическая система захвата изображения аналогично первому иллюстративному варианту осуществления.
[0071] Как показано на фиг. 8, на втором отражающем участке G2M оптической системы 400, обеспечены две отражающие части 201 и 202, которые эксцентричны в направлении X относительно оптической оси A. На основе двух отражающих частей 201 и 202, можно разделить зрачок оптической системы 400 в горизонтальном поперечном сечении. Каждая из отражающих частей 201 и 202 сформирована из отражающей пленки аналогично первому иллюстративному варианту осуществления.
[0072] В случае, когда оптическая система 400 используется как оптическая система измерения расстояния, датчик изображения, способный осуществлять фотоэлектрическое преобразование с возможностью различения изображения объекта, образованного пучком, отраженным отражающей частью 201 и изображения объекта, образованного пучком, отраженным отражающей частью 202, располагается на плоскости изображения IMG оптической системы 400. Такие датчик изображения, оптическая система 400 и блок обработки, описанные ниже могут формировать устройство измерения расстояния, например, автомобильную камеру.
[0073] Когда объект присутствует на фокальной плоскости оптической системы 400, позиционные сдвиги не возникают в изображениях двух разделенных пучков на плоскости изображения IMG оптической системы 400. Однако, когда объект присутствует в позиции, отличной от фокальной плоскости оптической системы 400, позиционные сдвиги возникают в изображениях двух разделенных пучков. В этом случае, позиционный сдвиг изображений, образованных соответствующими пучками, соответствует величине смещения объекта от фокальной плоскости. Таким образом, получаются величина позиционного сдвига изображений соответствующих пучков и направление позиционного сдвига, что позволяет измерять расстояние от объекта.
[0074] В оптической системе 400 две отражающие части эксцентричны в направлении X. Альтернативно, две отражающие части могут быть эксцентрическими в направлении Y по мере необходимости. Однако, для повышения точности измерения расстояния, желательно, чтобы две отражающие части были эксцентрическими в направлении X. Дело в том, что на эффективном участке, указанном пунктирной линией на фиг. 8, значение диафрагмы в горизонтальном направлении, которое симметрично относительно оптической оси A, меньше, чем значение диафрагмы в вертикальном направлении, которое асимметрично относительно оптической оси A.
[0075] В оптической системе 400 согласно настоящему иллюстративному варианту осуществления, горизонтальный угол наблюдения равен 50°, вертикальный угол наблюдения равен 46°, и угол между центральным лучом и оптической осью A в горизонтальном поперечном сечении равен 38°. Кроме того, значения диафрагмы эффективного участка второго отражающего участка G2M, который указан пунктирной линией на фиг. 8, равны 1,5 в горизонтальном направлении и 5,3 в вертикальном направлении. Тогда, как показано в таблице 1 ниже, оптическая система 400 удовлетворяет всем вышеприведенным условным выражениям.
Таблица 1
[0076] На фиг. 9 показана диаграмма поперечной аберрации оптической системы 400 согласно настоящему иллюстративному варианту осуществления. Как можно видеть из фиг. 9, аберрационная кома и хроматическая аберрация увеличения хорошо корректируются. Кроме того, относительное отверстие оптической системы 400 равно 100% при всех углах наблюдения. Таким образом, обеспечивается оптическая система, которая является яркой от осевой части к внеосевой части. Оптическая система, которая имеет малые размеры, но высокую производительность формирования изображения, таким образом, применяется к устройству измерения расстояния, что позволяет уменьшить размеры устройства в целом b достичь высокой точности измерения расстояния.
[0077] Альтернативно, оптическая система 400 согласно настоящему иллюстративному варианту осуществления может использоваться как оптическая система захвата изображения аналогично оптическим системам согласно иллюстративным вариантам осуществления c первого по третий путем обеспечения отражающей пленки на всем эффективном участке, указанном пунктирной линией на фиг. 8. Также в этом случае, можно получить эффекты, аналогичные описанным в иллюстративных вариантах осуществления с первого по третий. Кроме того, каждая из оптических систем согласно иллюстративным вариантам осуществления c первого по третий может использоваться как оптическая система измерения расстояния аналогично оптической системе 400 согласно настоящему иллюстративному варианту осуществления. В этом случае, аналогично оптической системе 400, зрачок можно разделять путем обеспечения двух отражающих частей на втором отражающем участке G2M каждой из оптических систем согласно иллюстративным вариантам осуществления c первого по третий.
Примеры численных значений
[0078] Ниже проиллюстрированы примеры численных значений с первого по четвертый, соответствующие оптическим системам согласно иллюстративным вариантам осуществления с первого по четвертый.
[0079] В каждом из примеров численных значений, номер поверхности представляет номер (i) оптической поверхности, отсчитываемый от стороны увеличения, r представляет радиус кривизны (мм) i-ой оптической поверхности (i-ой поверхности), и d представляет расстояние (мм) между i-ой поверхностью и (i+1)-ой поверхностью. Nd и νd представляют показатель преломления и число Аббе, соответственно, на d-линии среды между i-ой поверхностью и (i+1)-ой поверхностью. Кроме того, Fno представляет значение диафрагмы, и фокусное расстояние измеряется в мм. Расстояние до поверхности d положительно в направлении к стороне уменьшения вдоль оптического пути и отрицательно в направлении к стороне увеличения вдоль оптического пути. "E±N" означает "×10±N".
[0080] В каждом из примеров численных значений, оптическая поверхность, имеющая номер поверхности с "*" на своей стороне является асферической поверхностью. В каждом из примеров численных значений, каждая оптическая поверхность, имеющая форму асферической поверхности, имеет поворотно-симметричную форму относительно оптической оси A и представлена следующим выражением асферической поверхности.
 (1)
(1)
[0081] В этом выражении асферической поверхности, z представляет сагиттальную величину (мм) в направлении оптической оси формы асферической поверхности, c представляет кривизну (1/мм) на оптической оси A, k представляет коническую постоянную (коническую константу), h представляет расстояние (мм) в радиальном направлении от оптической оси A, и от A до D представляют асферические коэффициенты членов с четвертого до десятого порядка. В вышеприведенном выражении асферической поверхности, первый член представляет сагиттальную величину опорной сферической поверхности, и радиус кривизны опорной сферической поверхности равен r=1/c. Кроме того, второй член и последующие члены представляют сагиттальную величину (величину асферической поверхности) компонента асферической поверхности, заданной на опорной сферической поверхности. В настоящем иллюстративном варианте осуществления используются асферические коэффициенты членов с четвертого до десятого порядка. Альтернативно, может использоваться асферический коэффициент члена двенадцатого или более высокого порядка. В каждом из примеров численных значений, в случае, когда оптическая поверхность имеет форму асферической поверхности, радиус кривизны опорной сферической поверхности является радиусом кривизны оптической поверхности, и радиус кривизны оптической поверхности удовлетворяет вышеприведенным условным выражениям.
Первый пример численного значения
Данные поверхности
Асферический коэффициент
Различные типы данных
Фокусное расстояние 10,8
Fno (горизонтальное направление) 1,2
Fno (вертикальное направление) 3,0
Угол наблюдения (горизонтальное направление) ±25°
Угол наблюдения (вертикальное направление) ±14,5°
Второй пример численного значения
Данные поверхности
Асферический коэффициент
Различные типы данных
Фокусное расстояние 10,7
Fno (горизонтальное направление) 1,4
Fno (вертикальное направление) 2,7
Угол наблюдения (горизонтальное направление) ±25°
Угол наблюдения (вертикальное направление) ±14,5°
Третий пример численного значения
Данные поверхности
Асферический коэффициент
Различные типы данных
Фокусное расстояние 11
Fno (горизонтальное направление) 1,4
Fno (вертикальное направление) 3,1
Угол наблюдения (горизонтальное направление) ±25°
Угол наблюдения (вертикальное направление) ±14,5°
Четвертый пример численного значения
Данные поверхности
Асферический коэффициент
Различные типы данных
Фокусное расстояние 10,9
Fno (горизонтальное направление) 1,5
Fno (вертикальное направление) 5,3
Угол наблюдения (горизонтальное направление) ±25°
Угол наблюдения (вертикальное направление) ±23°
Система автомобильных камер
[0082] На фиг. 10 показана схема, демонстрирующая конфигурации автомобильной камеры 10 согласно настоящему иллюстративному варианту осуществления и систему 600 автомобильных камер (устройство помощи в вождении), включающую в себя автомобильную камеру 10. Система 600 автомобильных камер является устройством, установленным на транспортном средстве, например, автомобиле, и помогающим в вождении транспортного средства на основании информации изображения, касающейся периферии транспортного средства, полученной автомобильной камерой 10. На фиг. 11 показана схема, демонстрирующая транспортное средство 700, включающее в себя систему 600 автомобильных камер. Фиг. 11 иллюстрирует случай, когда диапазон 50 захвата изображения автомобильной камеры 10 устанавливается в переднем направлении транспортного средства 700. Альтернативно, диапазон 50 захвата изображения может быть установлен в заднем направлении транспортного средства 700.
[0083] Как показано на фиг. 10, система 600 автомобильных камер включает в себя автомобильную камеру 10, устройство 20 получения информации о транспортном средстве, устройство 30 управления (электронный блок управления (ECU)) и устройство 40 предупредительной сигнализации. Кроме того, автомобильная камера 10 включает в себя блок 1 захвата изображения, блок 2 обработки изображения, блок 3 вычисления параллакса, блок 4 вычисления расстояния и блок 5 определения столкновения. Блок 2 обработки изображения, блок 3 вычисления параллакса, блок 4 вычисления расстояния и блок 5 определения столкновения образуют блок обработки. Блок 1 захвата изображения имеет оптическую систему согласно любому из вышеописанных иллюстративных вариантов осуществления и датчик разности фаз в плоскости формирования изображения.
[0084] На фиг. 12 показана блок-схема операций, демонстрирующая пример работы системы 600 автомобильных камер согласно настоящему иллюстративному варианту осуществления. Согласно этой блок-схеме операций, работа системы 600 автомобильных камер описана ниже.
[0085] Сначала, на этапе S1, целевой объект (объект) на периферии транспортного средства 700 захватывается с использованием блока 1 захвата изображения, и получается множество фрагментов данных изображения (данные параллакса изображения).
[0086] Кроме того, на этапе S2, информация о транспортном средстве получается от устройства 20 получения информации о транспортном средстве. Информация о транспортном средстве является информацией, включающей в себя скорость, угловую скорость рыскания и угол поворота управляемых колес транспортного средства 700.
[0087] На этапе S3, блок 2 обработки изображения осуществляет обработку изображений на множестве фрагментов данных изображения, полученных блоком 1 захвата изображения. В частности, блок 2 обработки изображения осуществляет анализ особенностей изображения для анализа величин особенностей, например, величины и направления края в данных изображения и значение плотности данных изображения. Этот анализ особенностей изображения может осуществляться на каждом из множества фрагментов данных изображения или может осуществляться только на некоторых из множества фрагментов данных изображения.
[0088] На этапе S4, блок 3 вычисления параллакса вычисляет информацию параллакса (сдвига изображения), касающуюся параллакса между множеством фрагментов данных изображения, полученных блоком 1 захвата изображения. В качестве способа вычисления для вычисления информации параллакса, может использоваться известный способ, например, алгоритм последовательного обнаружения сходства (SSDA) или способ пространственной корреляции. Таким образом, способ вычисления не описан в настоящем иллюстративном варианте осуществления. Процессы этапов S2, S3 и S4 может осуществляться в вышеописанном порядке, или может осуществляться параллельно друг с другом.
[0089] На этапе S5, блок 4 вычисления расстояния вычисляет информацию расстояния, касающуюся расстояния от целевого объекта, захваченного блоком 1 захвата изображения. Информацию расстояния можно вычислять на основании информации параллакса, вычисленной блоком 3 вычисления параллакса, и внутренних параметров и внешних параметров блока 1 захвата изображения. Эта информация расстояния является информацией, касающейся позиции относительно целевого объекта, например, расстояния от целевого объекта, величины расфокусировки или величины сдвига изображения, и может непосредственно представлять значение расстояния целевого объекта в изображении, или может косвенно представлять информацию, соответствующую значению расстояния.
[0090] Затем, на этапе S6, блок 5 определения столкновения определяет, включена в ли информация расстояния, вычисленная блоком 4 вычисления расстояния, в заранее заданный диапазон расстояния. Это позволяет определять, присутствует ли препятствие в пределах заданного расстояния на периферии транспортного средства 700, и определять возможность столкновения между транспортным средством 700 и препятствием. В случае, когда препятствие присутствует в пределах заданного расстояния (Да на этапе S6), на этапе S7, блок 5 определения столкновения определяет, что существует возможность столкновения. В случае, когда препятствие отсутствует в пределах заданного расстояния (Нет на этапе S6), на этапе S8, блок 5 определения столкновения определяет, что не существует возможности столкновения.
[0091] Затем, в случае, когда на этапе S7 определено, что существует возможность столкновения, блок 5 определения столкновения извещает устройство 30 управления и устройство 40 предупредительной сигнализации результата определения. При этом, на основании результата определения блока 5 определения столкновения, устройство 30 управления управляет транспортным средством 700. На основании результата определения блока 5 определения столкновения, устройство 40 предупредительной сигнализации выдает предупредительный сигнал.
[0092] Например, устройство 30 управления осуществляет управление для торможения транспортного средства 700, возврата педали газа транспортного средства 700 или генерации сигнала управления для создания тормозящего усилия на каждом колесе транспортного средства 700, для подавления выхода двигателя или мотора транспортного средства 700. Кроме того, устройство 40 предупредительной сигнализации предупреждает пользователя (водителя) транспортного средства 700 путем вывода предупредительного сигнала, например, звука, отображения предупредительной информации на экране автомобильной навигационной системы или передачи вибрации на ремень безопасности или рулевое колесо.
[0093] На основе системы 600 автомобильных камер согласно настоящему иллюстративному варианту осуществления, можно, посредством вышеупомянутой обработки, для эффективного обнаружения препятствия и избежания столкновение между транспортным средством и препятствием. В частности, оптическая система согласно каждому из вышеописанных иллюстративных вариантов осуществления применяется к системе 600 автомобильных камер, что позволяет повысить степень свободы в размещении автомобильной камеры 10 в целом путем уменьшения размера автомобильной камеры 10, и также обнаруживать препятствие и определять столкновение в широком угле наблюдения.
[0094] В настоящем иллюстративном варианте осуществления приведено описание конфигурации, в которой автомобильная камера 10 включает в себя один-единственный блок 1 захвата изображения, имеющий датчик разности фаз в плоскости формирования изображения. Однако настоящее изобретение этим не ограничивается. Альтернативно, стереокамера, включающая в себя два блока захвата изображения может использоваться в качестве автомобильной камеры 10. В этом случае, два блока захвата изображения синхронизируются друг с другом и одновременно получают фрагменты данных изображения, что позволяет, с использованием двух фрагментов данных изображения, для осуществления обработки, аналогичной описанной выше, даже без использования датчика разности фаз в плоскости формирования изображения. Если же разность между количеством захватов изображения двух блоков захвата изображения известна, может потребоваться синхронизация двух блоков захвата изображения друг с другом.
[0095] Кроме того, возможны различные иллюстративные варианты осуществления вычисления информации расстояния. В порядке примера, описан случай, когда датчик изображения типа разделения зрачка, имеющий множество пиксельных частей, правильно размещенных в двухмерном массиве используется как датчик изображения, включенный в блок 1 захвата изображения. В датчике изображения типа разделения зрачка, каждая пиксельная часть включает в себя микролинзу и множество блоков фотоэлектрического преобразования. Таким образом, датчик изображения типа разделения зрачка может принимать пару пучков, проходящих через разные участки в зрачке оптической системы, и выводить пару фрагментов данных изображения от каждого блока фотоэлектрического преобразования.
[0096] Затем величина сдвига изображения на каждом участке вычисляется путем вычисления корреляции между двумя фрагментами данных изображения. Затем блок 4 вычисления расстояния вычисляет данные карты сдвига изображения, представляющие распределение величин сдвига изображения. Альтернативно, блок 4 вычисления расстояния может дополнительно преобразовывать вычисленную величину сдвига изображения в величину расфокусировки и генерировать данные карты расфокусировки, представляющие распределение величин расфокусировки (распределение на двухмерной плоскости захваченного изображения). Кроме того, блок 4 вычисления расстояния может получать данные карты расстояния, представляющие расстояние от целевого объекта, преобразованного из величины расфокусировки.
[0097] В настоящем иллюстративном варианте осуществления, система 600 автомобильных камер применяется для помощи в вождении (уменьшения повреждения при столкновении). Однако настоящее изобретение этим не ограничивается. Альтернативно, система 600 автомобильных камер может применяться к круиз-контролю (включающему в себя круиз-контроль с функцией слежения по всем скоростям) или автоматическому вождению. Кроме того, система 600 автомобильных камер может применяться не только к транспортному средству, например, автомобилю, но и к движущемуся телу (движущемуся устройству), например, судну, воздушному судну или промышленному роботу. Кроме того, автомобильная камера 10 согласно настоящему иллюстративному варианту осуществления может применяться не только к движущемуся телу, но и к устройству, широко использующему распознавание объектов, например, интеллектуальной транспортной системе (ITS).
[0098] Приведено подробное описание случая, когда оптическая система согласно каждому из вышеописанных иллюстративных вариантов осуществления применяется как оптическая система измерения расстояния до устройства измерения расстояния, например, автомобильной камере 10. Как описано выше, вертикальный угол наблюдения оптической системы согласно каждому из иллюстративных вариантов осуществления устанавливается только на одной стороне относительно оптической оси A. Таким образом, в случае, когда оптическая система применяется к автомобильной камере 10, и автомобильная камера 10 установлена на транспортном средстве, желательно помещать оптическую систему таким образом, что оптическая ось A не параллельна горизонтальному направлению.
[0099] Например, в случае, когда оптическая система согласно каждому из вышеописанных иллюстративных вариантов осуществления используется как оптическая система измерения расстояния, желательно, располагать оптическую систему таким образом, чтобы оптическая ось A была наклонена вверх относительно горизонтального направления, для приближения центра вертикального угла наблюдения к горизонтальному направлению. Альтернативно, каждая оптическая система поворачивается на 180° (сверху вниз) вокруг оси X и затем располагается таким образом, что оптическая ось A наклоняется вниз относительно горизонтального направления. Это позволяет надлежащим образом устанавливать диапазон захвата изображения автомобильной камеры 10.
[0100] Однако в оптической системе согласно каждому из иллюстративных вариантов осуществления, производительность формирования изображения максимальна в осевой части, тогда как производительность формирования изображения снижается на периферийных углах наблюдения. Таким образом, более желательно помещать оптическую систему таким образом, чтобы свет от объекта, к которому приковано внимание, проходил вблизи осевой части в оптической системе. Например, в случае, когда автомобильная камера 10 должна обращать внимание на знак или препятствие на дороге, желательно сделать производительность формирования изображения в угле наблюдения на нижней стороне (стороне земной поверхности) более высокой, чем на верхней стороне (стороне неба) относительно горизонтального направления. В этом случае, в случае, если используется оптическая система согласно каждому из иллюстративных вариантов осуществления, то, как описано выше, каждая оптическая система может поворачиваться сверху вниз и затем располагаться таким образом, чтобы оптическая ось A наклонялась вниз относительно горизонтального направления, для ориентации угла наблюдения вблизи оптической оси A вниз.
Проекционное устройство
[0101] В случае, когда оптическая система согласно каждому из вышеописанных иллюстративных вариантов осуществления применяется как проекционная оптическая система к проекционному устройству, отображающая поверхность отображающего элемента, например, жидкокристаллической панели (пространственного модулятора), располагается в позиции плоскости уменьшения оптической системы. Однако, в случае, когда оптическая система применяется к проекционному устройству, сторона физического тела и сторона изображения меняются местами, и направление оптического пути меняется на противоположное. Таким образом, можно применять конфигурацию, в которой изображение, отображаемое на отображающей поверхности (плоскости уменьшения) отображающего элемента, расположенного на стороне физического тела, проецируется (формируется) оптической системой на плоскости проекции (плоскости увеличения), например, экране, расположенном на стороне изображения. Также в этом случае, аналогично случаю, когда оптическая система применяется к устройству захвата изображения, желательно, чтобы выполнялись условные выражения в иллюстративных вариантах осуществления.
[0102] Хотя настоящее изобретение описано со ссылкой на иллюстративные варианты осуществления, следует понимать, что изобретение не ограничивается раскрытыми иллюстративными вариантами осуществления. Объем нижеследующей формулы изобретения согласуется с самой широкой интерпретацией, охватывая все подобные модификации и эквивалентные структуры и функции.
Оптическая система может использоваться в качестве устройства захвата изображения или проекционного устройства. Оптическая система содержит первый оптический элемент, включающий первый отражающий участок, имеющий выпуклую форму к стороне увеличения, второй оптический элемент, имеющий поверхность уменьшающей стороны, имеющую выпуклую форму к стороне увеличения, и третий оптический элемент, имеющий поверхность увеличивающей стороны, имеющую выпуклую форму к стороне увеличения, и включающий преломляющий участок положительной оптической силы. Поверхность уменьшающей стороны второго оптического элемента или поверхность увеличивающей стороны третьего оптического элемента включает в себя второй отражающий участок. Свет от стороны увеличения распространяется последовательно через преломляющий участок первого оптического элемента, второй отражающий участок, первый отражающий участок, преломляющие участки второго и третьего оптических элементов. Технический результат – обеспечение малых размеров оптической системы при высоком качестве изображения. 5 н. и 17 з.п. ф-лы, 1 табл., 16 ил.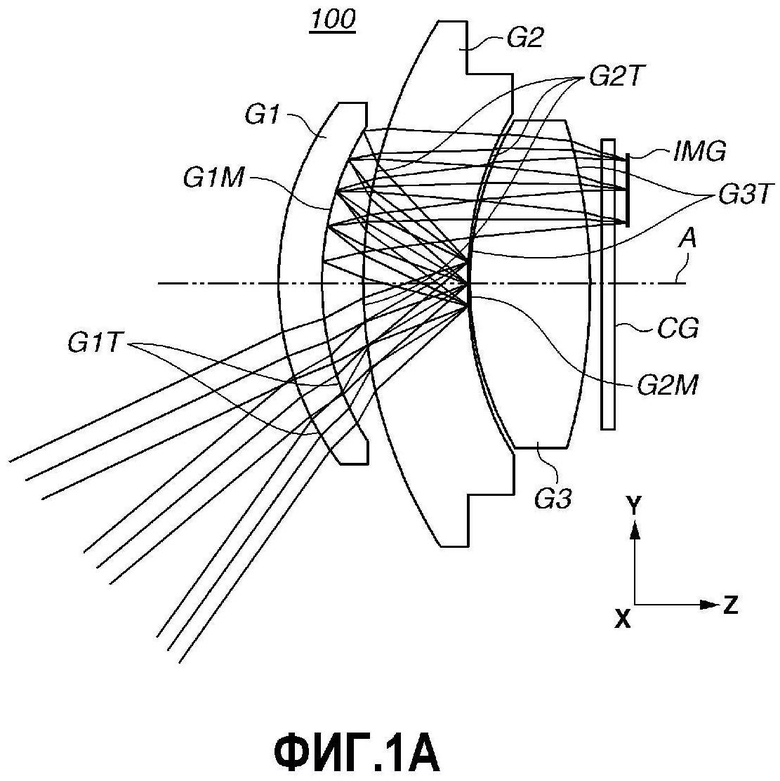
1. Оптическая система, содержащая:
первый оптический элемент, включающий в себя первый отражающий участок, имеющий выпуклую форму к стороне увеличения;
второй оптический элемент, имеющий поверхность уменьшающей стороны, имеющую выпуклую форму к стороне увеличения; и
третий оптический элемент, имеющий поверхность увеличивающей стороны, имеющую выпуклую форму к стороне увеличения,
причем поверхность уменьшающей стороны второго оптического элемента или поверхность увеличивающей стороны третьего оптического элемента включает в себя второй отражающий участок,
причем третий оптический элемент включает в себя преломляющий участок, имеющий положительную оптическую силу, и
причем свет от стороны увеличения распространяется к стороне уменьшения последовательно через преломляющий участок первого оптического элемента, второй отражающий участок, первый отражающий участок, преломляющий участок второго оптического элемента и преломляющий участок третьего оптического элемента.
2. Оптическая система по п. 1, в которой выполняется следующее условное выражение:
0,3≤Lg/Lm≤0,95
где полная толщина оптических элементов, присутствующих между первым отражающим участком и вторым отражающим участком, обозначена Lg, и расстояние между оптической поверхностью, включающей в себя первый отражающий участок, и оптической поверхностью, включающей в себя второй отражающий участок, обозначено Lm.
3. Оптическая система по п. 1, в которой выполняется следующее условное выражение:
0,7≤Rp/Rn≤1,3
где радиус кривизны оптической поверхности, включающей в себя первый отражающий участок, обозначен Rp, и радиус кривизны оптической поверхности, включающей в себя второй отражающий участок, обозначен Rn.
4. Оптическая система по п. 1, в которой выполняется следующее условное выражение:
2,0≤R1/L1≤5,5
где радиус кривизны ближайшей преломляющей поверхности, которая является ближайшей к первому оптическому элементу (G1) из преломляющих поверхностей, расположенных на стороне уменьшения первого оптического элемента, обозначен R1, и расстояние между ближайшей преломляющей поверхностью и оптической поверхностью, включающей в себя второй отражающий участок, обозначен L1.
5. Оптическая система по п. 1, в которой показатель преломления среды между первым оптическим элементом и вторым оптическим элементом меньше, чем показатель преломления второго оптического элемента.
6. Оптическая система по п. 1, в которой второй отражающий участок включает в себя отражающую часть, выполненную с возможностью отражения части света, и светопреграждающую часть, выполненную с возможностью перекрытия части света.
7. Оптическая система по п. 6, в которой диаметр отражающей части в первом направлении, перпендикулярном оптической оси больше, чем диаметр отражающей части во втором направлении, перпендикулярном оптической оси и первому направлению, и первый отражающий участок располагается на одной стороне относительно оптической оси во втором направлении.
8. Оптическая система по п. 1, в которой первый отражающий участок включен в поверхность уменьшающей стороны первого оптического элемента.
9. Оптическая система по п. 1, в которой первый оптический элемент включает в себя преломляющий участок, имеющий положительную оптическую силу.
10. Оптическая система по п. 9, в которой первый оптический элемент представляет собой положительную менисковую линзу.
11. Оптическая система по п. 1, в которой второй отражающий участок включен в поверхность уменьшающей стороны второго оптического элемента.
12. Оптическая система по п. 1, в которой второй оптический элемент включает в себя преломляющий участок, имеющий отрицательную оптическую силу.
13. Оптическая система по п. 1, в которой поверхность увеличивающей стороны второго оптического элемента имеет выпуклую форму к стороне увеличения.
14. Оптическая система по п. 1, в которой поверхность уменьшающей стороны третьего оптического элемента имеет вогнутую форму к стороне увеличения.
15. Оптическая система по п. 1, в которой центр кривизны каждой из оптических поверхностей первого оптического элемента, второго оптического элемента и третьего оптического элемента присутствует на оптической оси.
16. Оптическая система по п. 1, в которой каждая из оптических поверхностей первого оптического элемента, второго оптического элемента и третьего оптического элемента поворотно-симметрична относительно оптической оси.
17. Устройство захвата изображения, содержащее:
датчик изображения, выполненный с возможностью захвата физического тела; и
оптическую систему по любому из пп. 1-16, выполненную с возможностью формирования изображения физического тела на поверхности формирования изображения датчика изображения.
18. Устройство измерения расстояния, содержащее:
устройство захвата изображения по п. 17, выполненное с возможностью получения данных изображения физического тела; и
блок вычисления расстояния, выполненный с возможностью получения информации расстояния, касающейся расстояния от физического тела, на основании данных изображения.
19. Система автомобильных камер, содержащая:
устройство измерения расстояния по п. 18; и
блок определения столкновения, выполненный с возможностью определения, существует ли возможность столкновения между автомобилем и физическим телом, на основании информации расстояния.
20. Система автомобильных камер по п. 19, дополнительно содержащая устройство управления, выполненное с возможностью, в случае, когда определено, что существует возможность столкновения между автомобилем и физическим телом, выводить сигнал управления для создания тормозящего усилия на каждом колесе автомобиля.
21. Система автомобильных камер по п. 19, дополнительно содержащая устройство предупредительной сигнализации, выполненное с возможностью, в случае, когда определено, что существует возможность столкновения между автомобилем и физическим телом, подавать предупредительный сигнал водителю автомобиля.
22. Проекционное устройство, содержащее:
отображающий элемент, выполненный с возможностью отображения изображения; и
оптическую систему по любому из пп. 1-16, выполненную с возможностью формирования изображения на отображающей поверхности отображающего элемента.
| JP 2004361777 A, 24.12.2004 | |||
| US 5652679 A1, 29.07.1997 | |||
| US 5659430 A1, 19.08.1997 | |||
| WO 2017039712 A1, 09.03.2017 | |||
| US 2007153398 A1, 05.07.2007. |

