Область техники
Настоящее изобретение относится к устройству управления трансмиссией транспортного средства, в котором трансмиссия, предоставленная в приводной системе, имеет, в качестве элементов переключения передач, которые переключаются между ступенями переключения передач, зацепляющие муфты, которые вводятся в зацепление и зацепляются посредством перемещения из расцепленных позиций.
Уровень техники
Традиционно, известно устройство управления для автоматической трансмиссии, в котором, в автоматической трансмиссии, содержащей зацепляющую муфту, которая имеет механизм управления частотой вращения, в ходе переключения передач, в котором зацепляющая муфта зацепляется, управление с обратной связью по частоте вращения (ниже "обратная связь", называемая "FB") электромотора выполняется для того, чтобы обеспечивать схождение частоты дифференциального вращения зацепляющей муфты с частотой вращения при определении синхронизации. Посредством выполнения FB-управления по частоте вращения, когда частота дифференциального вращения переходит в пределы диапазона частот вращения при определении синхронизации, зацепление зацепляющей муфты начинается, и зацепление завершается в то время, когда FB-управление по частоте вращения продолжается (например, см. публикацию JP 2005-90604).
Проблемы, решаемые изобретением
Тем не менее, в традиционном устройстве управления автоматической трансмиссией, выполняется FB-управление по частоте вращения, которое обеспечивает схождение фактической частоты дифференциального вращения зацепляющей муфты с целевой частотой дифференциального вращения, при котором частота вращения при определении синхронизации, заданная равной частоте дифференциального вращения, которая достигает плавной операции зацепления зацепляющей муфты, задается в качестве целевой частоты вращения. Следовательно, при FB-управлении по частоте вращения, когда зацепляющая муфта переходит в состояние зацепления, фактическая частота дифференциального вращения становится нулевой, и отклонение частот вращения, сформированное между фактической частотой дифференциального вращения и целевой частотой дифференциального вращения (частотой вращения при определении синхронизации), рассматривается как возмущения при управлении. Следовательно, если FB-управление по частоте вращения продолжается, когда зацепляющая муфта переходит в состояние зацепления до тех пор, пока не определяется то, что зацепление завершается, формируется крутящий FB-момент, который пытается сопоставлять фактическую частоту дифференциального вращения (нулевую частоту вращения) с целевой частотой дифференциального вращения (частотой вращения при определении синхронизации). Имеется проблема в том, что крутящий FB-момент вызывает дискомфорт у водителя в виде толчка транспортного средства.
С учетом вышеописанных проблем, цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления трансмиссией транспортного средства, которое уменьшает толчок транспортного средства, вызываемый посредством крутящего FB-момента, выводимого вследствие FB-управления по частоте вращения, во время переключения передач, когда зацепляющая муфта зацепляется, на основе определения синхронизации вращения.
Средство достижения цели
Чтобы достигать цели, описанной выше, транспортное средство настоящего изобретения оснащено трансмиссией, которая достигает множества ступеней переключения передач в приводной системе от источника мощности на ведущие колеса, и трансмиссия имеет, в качестве элементов переключения передач, которые переключаются между ступенями переключения передач, зацепляющие муфты, которые вводятся в зацепление и зацепляются посредством перемещения из расцепленных позиций.
Это транспортное средство содержит контроллер трансмиссии, который выполняет FB-управление по частоте вращения относительно электромотора, соединенного с зацепляющей муфтой, во время запроса на переключение передач на ступень переключения передач, на которой зацепляющая муфта зацепляется, и выводит инструкцию зацепления в зацепляющую муфту, когда частота дифференциального вращения зацепляющей муфты попадает в пределы диапазона частоты вращения при определении синхронизации, который задается равной заданным частотам дифференциального вращения, которые не являются нулевой частотой вращения.
Управление с обратной связью по частоте вращения для электромотора представляет собой управление, которое выводит крутящий момент с обратной связью, чтобы обеспечивать схождение фактической частоты вращения электромотора для электромотора с целевой частотой вращения электромотора, соответствующей частоте вращения при определении синхронизации.
После выполнения FB-управления по частоте вращения для электромотора, контроллер трансмиссии уменьшает эффективность FB-управления по частоте вращения для начала зацепления зацепляющей муфты по сравнению с моментом до начала зацепления.
Преимущества изобретения
Как результат, можно уменьшать толчок транспортного средства, вызываемый посредством крутящего FB-момента, выводимого вследствие FB-управления по частоте вращения во время переключения передач, когда зацепляющая муфта зацепляется, на основе определения синхронизации вращения.
Краткое описание чертежей
Фиг. 1 является общим видом системы, иллюстрирующим приводную систему и систему управления гибридного транспортного средства, к которому применяется устройство управления трансмиссией первого варианта осуществления.
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию системы управления системы управления переключением передач многоступенчатой зубчатой трансмиссии, смонтированной на гибридном транспортном средстве, к которому применяется устройство управления трансмиссией первого варианта осуществления.
Фиг. 3 является кратким схематичным видом карты переключения передач, иллюстрирующим принцип переключения схемы переключения передач в многоступенчатой зубчатой трансмиссии, смонтированной на гибридном транспортном средстве, к которому применяется устройство управления трансмиссией первого варианта осуществления.
Фиг. 4 является диаграммой схемы переключения передач, иллюстрирующей схемы переключения передач согласно позициям переключения трех зацепляющих муфт в многоступенчатой зубчатой трансмиссии, смонтированной на гибридном транспортном средстве, к которому применяется устройство управления трансмиссией первого варианта осуществления.
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления переключением передач, выполняемого в модуле управления трансмиссией первого варианта осуществления.
Фиг. 6 является характеристическим графиком первого FB-усиления, иллюстрирующим взаимосвязь FB-усиления относительно абсолютного значения частоты дифференциального вращения, используемой в процессе управления переключением передач первого варианта осуществления.
Фиг. 7 является характеристическим графиком второго FB-усиления, иллюстрирующим взаимосвязь FB-усиления относительно абсолютного значения частоты дифференциального вращения, используемой в процессе управления переключением передач первого варианта осуществления.
Фиг. 8 является схемой потока крутящего момента, иллюстрирующей поток крутящего момента MG1 и крутящего момента ICE в многоступенчатой зубчатой трансмиссии, когда выбирается схема переключения передач "EV вторая ICE вторая".
Фиг. 9 является схемой потока крутящего момента, иллюстрирующей поток крутящего момента MG1 и крутящего момента ICE в многоступенчатой зубчатой трансмиссии, когда выбирается схема переключения передач "EV вторая ICE третья".
Фиг. 10 является временной диаграммой, иллюстрирующей каждую из характеристик из продольной составляющей G/ частоты вращения MG1/частоты вращения двигателя (= частоты вращения MG2)/крутящего момента MG1/крутящего момента двигателя/крутящего момента MG2/задаваемой позиции C1/задаваемой позиции C2/режима управления MG2, при переключении схемы переключения передач многоступенчатой зубчатой трансмиссии с "EV вторая ICE вторая" на "EV вторая ICE третья" в первом варианте осуществления.
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления переключением передач, выполняемого в модуле управления трансмиссией второго варианта осуществления.
Фиг. 12 является временной диаграммой, иллюстрирующей каждую из характеристик из продольной составляющей G/ частоты вращения MG1/частоты вращения двигателя (= частоты вращения MG2)/крутящего момента MG1/крутящего момента двигателя/крутящего момента MG2/задаваемой позиции C1/задаваемой позиции C2/режима управления MG2, при переключении схемы переключения передач многоступенчатой зубчатой трансмиссии с "EV вторая ICE вторая" на "EV вторая ICE третья" во втором варианте осуществления.
Подробное описание вариантов осуществления изобретения
Ниже описывается предпочтительный вариант осуществления для реализации устройства управления трансмиссией транспортного средства согласно настоящему изобретению на основе первого и второго вариантов осуществления, проиллюстрированных на чертежах.
Первый вариант осуществления изобретения
Сначала описывается конфигурация.
Устройство управления трансмиссией первого варианта осуществления применяется к гибридному транспортному средству (одному примеру транспортного средства), содержащему, в качестве компонентов приводной системы, один двигатель, два электромотора/генератор и многоступенчатую зубчатую трансмиссию, имеющую три зацепляющих муфты. Ниже отдельно описываются "общая конфигурация системы", "конфигурация системы управления переключением передач", "конфигурация схем переключения передач" и "конфигурация процесса управления переключением передач" относительно конфигурации устройства управления трансмиссией гибридного транспортного средства в первом варианте осуществления.
Общая конфигурация системы
Фиг. 1 иллюстрирует приводную систему и систему управления гибридного транспортного средства, к которому применяется устройство управления трансмиссией первого варианта осуществления. Ниже описывается общая конфигурация системы на основе фиг. 1.
Приводная система гибридного транспортного средства содержит двигатель ICE внутреннего сгорания, первый электромотор/генератор MG1, второй электромотор/генератор MG2 и многоступенчатую зубчатую трансмиссию 1, имеющую три зацепляющих муфты C1, C2 и C3, как проиллюстрировано на фиг. 1. "ICE" является сокращением для "двигателя внутреннего сгорания".
Двигатель ICE внутреннего сгорания представляет собой, например, бензиновый двигатель или дизельный двигатель, расположенный в переднем отсеке транспортного средства, так что направление коленчатого вала находится в направлении ширины транспортного средства. Двигатель ICE внутреннего сгорания соединяется с картером 10 трансмиссии многоступенчатой зубчатой трансмиссии 1, и выходной вал двигателя внутреннего сгорания соединяется с первым валом 11 многоступенчатой зубчатой трансмиссии 1. Двигатель ICE внутреннего сгорания по существу выполняет запуск от MG2, при котором второй электромотор/генератор MG2 используется в качестве стартерного электромотора. Тем не менее, стартерный электромотор 2 остается для готовности к такой ситуации, когда не может обеспечиваться запуск от MG2 с использованием аккумулятора 3 с высоким уровнем мощности, к примеру, во время экстремального холода.
Первый электромотор/генератор MG1 и второй электромотор/генератор MG2 представляют собой синхронные электромоторы с постоянными магнитами, использующие трехфазный переменный ток и имеющие аккумулятор 3 с высоким уровнем мощности в качестве общего источника питания. Статор первого электромотора/генератора MG1 крепится к картеру первого электромотора/генератора MG1, и картер крепится к картеру 10 трансмиссии многоступенчатой зубчатой трансмиссии 1. Затем вал первого электромотора, интегрированный в ротор первого электромотора/генератора MG1, соединяется со вторым валом 12 многоступенчатой зубчатой трансмиссии 1. Статор второго электромотора/генератора MG2 крепится к картеру второго электромотора/генератора MG2, и картер крепится к картеру 10 трансмиссии многоступенчатой зубчатой трансмиссии 1. Затем вал второго электромотора, интегрированный в ротор второго электромотора/генератора MG2, соединяется с шестым валом 16 многоступенчатой зубчатой трансмиссии 1. Первый инвертор 4, который преобразует постоянный ток в трехфазный переменный ток в ходе подачи питания и преобразует трехфазный переменный ток в постоянный ток в ходе рекуперации, соединяется с обмоткой статора первого электромотора/генератора MG1 через первый жгут 5 проводов переменного тока. Второй инвертор 6, который преобразует постоянный ток в трехфазный переменный ток в ходе подачи питания и преобразует трехфазный переменный ток в постоянный ток в ходе рекуперации, соединяется с обмоткой статора второго электромотора/генератора MG2 через второй жгут 7 проводов переменного тока. Аккумулятор 3 с высоким уровнем мощности, первый инвертор 4 и второй инвертор 6 соединяются посредством жгута 8 проводов постоянного тока через распределительную коробку 9.
Многоступенчатая зубчатая трансмиссия 1 представляет собой трансмиссию с нормальным зацеплением, содержащую множество зубчатых пар, имеющих различные передаточные отношения, и содержит шесть валов-шестерней 11-16, содержащих шестерни и расположенных параллельно друг другу в картере 10 трансмиссии, и три зацепляющие муфты C1, C2 и C3 для выбора зубчатой пары. Первый вал 11, второй вал 12, третий вал 13, четвертый вал 14, пятый вал 15 и шестой вал 16 предоставляются в качестве валов-шестерней. Первая зацепляющая муфта C1, вторая зацепляющая муфта C2 и третья зацепляющая муфта C3 предоставляются в качестве зацепляющих муфт. Картер 10 трансмиссии содержит электрический масляный насос 20, который подает смазочное масло в участки зацепления шестерней и участки осевого подшипника внутри картера.
Первый вал 11 представляет собой вал, с которым соединяется двигатель ICE внутреннего сгорания, и первая шестерня 101, вторая шестерня 102 и третья шестерня 103 располагаются на первом валу 11 в порядке с правой стороны на фиг. 1. Первая шестерня 101 предоставляется как единое целое (что включает в себя закрепление как единого целого) на первом валу 11. Вторая шестерня 102 и третья шестерня 103 представляют собой шестерни холостого хода, в которых контактные участки, выступающие в осевом направлении, вставляются на внешний периметр первого вала 11, и предоставляются таким образом, что они могут соединяться с возможностью приведения в действие с первым валом 11 через вторую зацепляющую муфту C2.
Второй вал 12 соединяется с первым электромотором/генератором MG1 и представляет собой цилиндрический вал, коаксиально расположенный с осью, совмещенной с позицией внешней стороны первого вала 11, и четвертая шестерня 104 и пятая шестерня 105 располагаются на втором валу 12 в порядке с правой стороны на фиг. 1. Четвертая шестерня 104 и пятая шестерня 105 предоставляются как единое целое (что включает в себя закрепление как единого целого) на втором валу 12.
Третий вал 13 представляет собой вал, расположенные на стороне выходного вала многоступенчатой зубчатой трансмиссии 1, с шестой шестерней 106, седьмой шестерней 107, восьмой шестерней 108, девятой шестерней 109 и десятой шестерней 110, расположенными на третьем валу 13, в порядке с правой стороны на фиг. 1. Шестая шестерня 106, седьмая шестерня 107 и восьмая шестерня 108 предоставляются как единое целое (что включает в себя закрепление как единого целого) для третьего вала 13. Девятая шестерня 109 и десятая шестерня 110 представляют собой шестерни холостого хода, в которых контактные участки, выступающие в осевом направлении, вставляются на внешний периметр третьего вала 13, и предоставляются таким образом, что они могут соединяться с возможностью приведения в действие с третьим валом 13 через третью зацепляющую муфту C3. Затем шестая шестерня 106 вводится в зацепление со второй шестерней 102 первого вала 11, седьмая шестерня 107 вводится в зацепление с шестнадцатой шестерней 116 дифференциала 17, и восьмая шестерня 108 вводится в зацепление с третьей шестерней 103 первого вала 11. Девятая шестерня 109 вводится в зацепление с четвертой шестерней 104 второго вала 12, и десятая шестерня 110 вводится в зацепление с пятой шестерней 105 второго вала 12.
Четвертый вал 14 имеет оба конца, поддерживаемые на картере 10 трансмиссии, с одиннадцатой шестерней 111, двенадцатой шестерней 112 и тринадцатой шестерней 113, расположенными на четвертом валу 14, в порядке с правой стороны на фиг. 1. Одиннадцатая шестерня 111 предоставляется как единое целое (что включает в себя закрепление как единого целого) на четвертом валу 14. Двенадцатая шестерня 112 и тринадцатая шестерня 113 представляют собой шестерни холостого хода, в которых контактные участки, выступающие в осевом направлении, вставляются на внешний периметр четвертого вала 14, и предоставляются таким образом, что они могут соединяться с возможностью приведения в действие с четвертым валом 14 через первую зацепляющую муфту C1. Затем одиннадцатая шестерня 111 вводится в зацепление с первой шестерней 101 первого вала 11, двенадцатая шестерня 112 вводится в зацепление со второй шестерней 102 первого вала 11, и тринадцатая шестерня 113 вводится в зацепление с четвертой шестерней 104 второго вала 12.
Пятый вал 15 имеет оба конца, поддерживаемые на картере 10 трансмиссии, и четырнадцатая шестерня 114, которая вводится в зацепление с одиннадцатой шестерней 111 четвертого вала 14, предоставляется как единое целое с ним (что включает в себя закрепление как единого целого).
Шестой вал 16 соединяется со вторым электромотором/генератором MG2, и пятнадцатая шестерня 115, которая вводится в зацепление с четырнадцатой шестерней 114 пятого вала 15, предоставляется как единое целое с ним (что включает в себя закрепление как единого целого).
После этого второй электромотор/генератор MG2 и двигатель ICE внутреннего сгорания механически соединяются друг с другом посредством зубчатой передачи, сконфигурированной из пятнадцатой шестерни 115, четырнадцатой шестерни 114, одиннадцатой шестерни 111 и первой шестерни 101, которые вводятся в зубчатое зацепление друг с другом. Эта зубчатая передача служит в качестве редукторной передачи, которая замедляет частоту вращения MG2 во время запуска от MG2 двигателя ICE внутреннего сгорания посредством второго электромотора/генератора MG2, и служит в качестве повышающей передачи, которая ускоряет частоту вращения двигателя во время выработки мощности MG2 для формирования второго электромотора/генератора MG2, посредством приведения в действие двигателя ICE внутреннего сгорания.
Первая зацепляющая муфта C1 представляет собой кулачковую муфту, размещенную между двенадцатой шестерней 112 и тринадцатой шестерней 113 четвертого вала 14, и зацепляется посредством перемещения при зацеплении в состоянии синхронизации вращения, в силу отсутствия механизма синхронизации. Когда первая зацепляющая муфта C1 находится в левой позиции зацепления (слева), четвертый вал 14 и тринадцатая шестерня 113 соединяются с возможностью приведения в действие. Когда первая зацепляющая муфта C1 находится в позиции нейтрали (N), четвертый вал 14 и двенадцатая шестерня 112 расцепляются, и четвертый вал 14 и тринадцатая шестерня 113 расцепляются. Когда первая зацепляющая муфта C1 находится в правой позиции зацепления (справа), четвертый вал 14 и двенадцатая шестерня 112 соединяются с возможностью приведения в действие.
Вторая зацепляющая муфта C2 представляет собой кулачковую муфту, размещенную между второй шестерней 102 и третьей шестерней 103 первого вала 11, и зацепляется посредством перемещения при зацеплении в состоянии синхронизации вращения, в силу отсутствия механизма синхронизации. Когда вторая зацепляющая муфта C2 находится в левой позиции зацепления (слева), первый вал 11 и третья шестерня 103 соединяются с возможностью приведения в действие. Когда вторая зацепляющая муфта C2 находится в позиции нейтрали (N), первый вал 11 и вторая шестерня 102 расцепляются, и первый вал 11 и третья шестерня 103 расцепляются. Когда вторая зацепляющая муфта C2 находится в правой позиции зацепления (справа), первый вал 11 и вторая шестерня 102 соединяются с возможностью приведения в действие.
Третья зацепляющая муфта C3 представляет собой кулачковую муфту, размещенную между девятой шестерней 109 и десятой шестерней 110 третьего вала 13, и зацепляется посредством перемещения при зацеплении в состоянии синхронизации вращения, в силу отсутствия механизма синхронизации. Когда третья зацепляющая муфта C3 находится в левой позиции зацепления (слева), третий вал 13 и десятая шестерня 110 соединяются с возможностью приведения в действие. Когда третья зацепляющая муфта C3 находится в позиции нейтрали (N), третий вал 13 и девятая шестерня 109 расцепляются, и третий вал 13 и десятая шестерня 110 расцепляются. Когда третья зацепляющая муфта C3 находится в правой позиции зацепления (справа), третий вал 13 и девятая шестерня 109 соединяются с возможностью приведения в действие. Затем шестнадцатая шестерня 116, которая вводится в зацепление с седьмой шестерней 107, предоставленной как единое целое (что включает в себя закрепление как единого целого) для третьего вала 13 многоступенчатой зубчатой трансмиссии 1, соединяется с левым и правым ведущими колесами 19 через дифференциал 17 и левый и правый ведущие валы 18.
Система управления гибридного транспортного средства содержит гибридный модуль 21 управления, модуль 22 управления электромотором, модуль 23 управления трансмиссией и модуль 24 управления двигателем, как проиллюстрировано на фиг. 1.
Гибридный модуль 21 управления (сокращение: "HCM") представляет собой интегральное средство управления для того, чтобы надлежащим образом управлять энергопотреблением всего транспортного средства. Этот гибридный модуль 21 управления соединяется с другими модулями управления (модулем 22 управления электромотором, модулем 23 управления трансмиссией, модулем 24 управления двигателем и т.д.) таким образом, чтобы допускать двунаправленный обмен информацией посредством линии 25 CAN-связи. "CAN" в линии 25 CAN-связи является сокращением для "контроллерной сети".
Модуль 22 управления электромотором (сокращение: "MCU") выполняет управление подачей питания, управление рекуперацией и т.п. первого электромотора/генератора MG1 и второго электромотора/генератора MG2, посредством команд управления в первый инвертор 4 и второй инвертор 6. Режимы управления для первого электромотора/генератора MG1 и второго электромотора/генератора MG2 представляют собой "управление крутящим моментом" и "FB-управление по частоте вращения". При "управлении крутящим моментом", выполняется управление, при котором фактический крутящий момент электромотора принудительно придерживается целевого крутящего момента электромотора, когда определяется целевой крутящий момент электромотора, который должен совместно использоваться относительно целевой движущей силы. При "FB-управлении по частоте вращения", выполняется управление, в котором определяется целевая частота вращения электромотора, с которой синхронизируются частоты вращения входного/выходного вала муфты, и крутящий FB-момент выводится таким образом, чтобы обеспечить схождение фактической частоты вращения электромотора с целевой частотой вращения электромотора, когда имеется запрос на переключение передач, чтобы вводить в зацепление и зацеплять любую из зацепляющих муфт C1, C2 или C3 в ходе движения.
Модуль 23 управления трансмиссией (сокращение: "TMCU") выполняет управление переключением передач для переключения схемы переключения передач многоступенчатой зубчатой трансмиссии 1, посредством вывода команды управления током в электрические актуаторы 31, 32 или 33 (см. фиг. 2), на основе заданной входной информации. При этом управлении переключением передач, зацепляющие муфты C1, C2 или C3 избирательно зацепляются/расцепляются, и зубчатая пара, участвующая в передаче мощности, выбирается из множества пар зубчатых пар. Здесь, во время запроса на переключение передач, чтобы зацеплять любую из расцепленных зацепляющих муфт C1, C2 или C3, с тем чтобы подавлять частоту дифференциального вращения между входным/выходным валом муфты, чтобы обеспечивать зацепление, FB-управление по частоте вращения (управление синхронизацией вращения) первого электромотора/генератора MG1 или второго электромотора/генератора MG2 используется в комбинации.
Модуль 24 управления двигателем (сокращение: "ECU") выполняет управление запуском двигателя ICE внутреннего сгорания, управление остановкой двигателя ICE внутреннего сгорания, управление отсечкой топлива и т.п., посредством вывода команды управления в модуль 22 управления электромотором, свечу зажигания, актуатор впрыска топлива и т.п., на основе заданной входной информации.
Конфигурация системы управления переключением передач
Многоступенчатая зубчатая трансмиссия 1 согласно первому варианту осуществления отличается тем, что эффективность достигается посредством уменьшения сопротивления вследствие торможения посредством использования, в качестве элементов переключения передач, зацепляющих муфт C1, C2 и C3 (кулачковой муфты), которые зацепляются. Далее, когда имеется запрос на переключение передач, чтобы вводить в зацепление и зацеплять любую из зацепляющих муфт C1, C2 или C3, частоты дифференциального вращения входного/выходного вала муфты синхронизируются посредством первого электромотора/генератора MG1 или второго электромотора/генератора MG2, и ход зацепления начинается, как только частота вращения попадает в диапазон частот вращения при определении синхронизации, чтобы реализовывать переключение передач. Помимо этого, когда имеется запрос на переключение передач, чтобы расцеплять любую из зацепленных зацепляющих муфт C1, C2 или C3, передаточный крутящий момент муфты расцепляющей муфты уменьшается, и ход расцепления начинается, как только крутящий момент становится равным или меньше значения определения крутящего момента расцепления, чтобы реализовывать переключение передач. Ниже описывается конфигурация системы управления переключением передач многоступенчатой зубчатой трансмиссии 1 на основе фиг. 2.
Система управления переключением передач содержит, в качестве зацепляющих муфт, первую зацепляющую муфту C1, вторую зацепляющую муфту C2 и третью зацепляющую муфту C3, как проиллюстрировано на фиг. 2. Первый электрический актуатор 31, второй электрический актуатор 32 и третий электрический актуатор 33 предоставляются. Рабочий механизм 41 первой зацепляющей муфты, рабочий механизм 42 второй зацепляющей муфты и рабочий механизм 43 третьей зацепляющей муфты предоставляются в качестве механизмов, которые преобразуют операции актуатора в операции зацепления/расцепления муфты. Кроме того, модуль 23 управления трансмиссией предоставляется в качестве средства управления первого электрического актуатора 31, второго электрического актуатора 32 и третьего электрического актуатора 33.
Первая зацепляющая муфта C1, вторая зацепляющая муфта C2 и третья зацепляющая муфта C3 представляют собой кулачковые муфты, которые переключаются между позицией нейтрали (N: расцепленной позицией), левой позицией зацепления (слева: позицией зацепления муфты с левой стороны) и правой позицией зацепления (справа: позицией зацепления муфты с правой стороны). Зацепляющие муфты C1, C2 и C3 имеют идентичную конфигурацию, содержащую соединительные втулки 51, 52 и 53; левые кольца 54, 55 и 56 кулачковой муфты; и правые кольца 54, 55 и 56 кулачковой муфты. Соединительные втулки 51, 52 и 53 предоставляются таким образом, что они могут перемещаться в осевом направлении посредством шлицевого соединения через ступицу, которая не показана, прикрепленную к четвертому валу 14, первому валу 11 и третьему валу 13, и имеют собачки 51a, 51b; 52a, 52b; и 53a, 53b, имеющие с обеих сторон плоские верхние поверхности. Кроме того, вилочные канавки 51c, 52c и 53c предоставляются в круговых центральных участках соединительных втулок 51, 52 и 53. Левые кольца 54, 55 и 56 кулачковой муфты крепятся к контактным участкам шестерней 113, 103 и 110, которые представляют собой левые шестерни холостого хода зацепляющих муфт C1, C2 и C3 и имеют собачки 54a, 55a и 56a с плоскими верхними поверхностями, которые расположены напротив собачек 51a, 52a и 53a. Правые кольца 54, 55 и 56 кулачковой муфты крепятся к контактным участкам шестерней 112, 102 и 109, которые представляют собой правые шестерни холостого хода зацепляющих муфт C1, C2 и C3 и имеют собачки 57b, 58b и 59b с плоскими верхними поверхностями, которые расположены напротив собачек 51b, 52b и 53b.
Рабочий механизм 41 первой зацепляющей муфты, рабочий механизм 42 второй зацепляющей муфты и рабочий механизм 43 третьей зацепляющей муфты преобразуют движения при повороте электрических актуаторов 31, 32 и 33 в осевое перемещение соединительных втулок 51, 52 и 53. Рабочие механизмы 41, 42 и 43 зацепляющей муфты имеют идентичную конфигурацию, содержащую поворотные тяги 61, 62 и 63; стержни 64, 65 и 66 переключения передач; и вилки 67, 68 и 69 переключения передач. Один конец каждой из поворотных тяг 61, 62 и 63 предоставляется на валах актуаторов электрических актуаторов 31, 32 и 33, при этом другой конец соединяется с одним из стержней 64, 65 и 66 переключения передач таким образом, что он является относительно смещаемым. Стержни 64, 65 и 66 переключения передач допускают расширение и сжатие согласно абсолютной величине и направлению передающей силы стержня, посредством размещения пружин 64a, 65a и 66a в позициях разделения стержней. Один конец каждой из вилок 67, 68 и 69 переключения передач крепится к одному из стержней 64, 65 или 66 переключения передач, и другой конец располагается в одной из вилочных канавок 51c, 52c или 53c соединительных втулок 51, 52 и 53.
Модуль 23 управления трансмиссией вводит сигналы датчиков и сигналы переключения из датчика 71 скорости транспортного средства, датчика 72 величины открытия позиции педали акселератора, датчика 73 частоты вращения выходного передаточного вала, датчика 74 частоты вращения двигателя, датчика 75 частоты вращения MG1, датчика 76 частоты вращения MG2, переключателя 77 режима движения и т.п. Датчик 73 частоты вращения выходного передаточного вала предоставляется на третьем валу 13. В таком случае, предоставляется модуль сервоуправления позицией (например, сервосистема позиционирования посредством PID-управления), который управляет зацеплением и расцеплением зацепляющих муфт C1, C2 и C3, определенных посредством позиций соединительных втулок 51, 52 и 53. Этот модуль сервоуправления позицией вводит сигналы датчиков из датчика 81 позиции первой втулки, датчика 82 позиции второй втулки и датчика 83 позиции третьей втулки. После этого считываются значения датчиков для датчиков 81, 82 и 83 позиции втулки, и ток прикладывается к электрическим актуаторам 31, 32 и 33 таким образом, что позиции соединительных втулок 51, 52 и 53 находятся в расцепленной позиции или позиции зацепления согласно ходу зацепления. Таким образом, посредством задания зацепленного состояния, в котором собачки на соединительных втулках 51, 52 и 53 и собачки на шестернях холостого хода находятся в позициях зацепления между собой, шестерни холостого хода соединяются с возможностью приведения в действие с четвертым валом 14, первым валом 11 и третьим валом 13. С другой стороны, посредством задания расцепленного состояния, в котором собачки на соединительных втулках 51, 52 и 53 и собачки на шестернях холостого хода находятся в позициях отсутствия зацепления посредством смещения соединительных втулок 51, 52 и 53 в осевом направлении, шестерни холостого хода отсоединяются от четвертого вала 14, первого вала 11 и третьего вала 13.
Конфигурация схемы переключения передач
Многоступенчатая зубчатая трансмиссия 1 первого варианта осуществления отличается тем, что уменьшение размера достигается посредством уменьшения потерь при передаче мощности в силу отсутствия элемента поглощения дифференциального вращения, такого как жидкостное сцепление, и посредством уменьшения ступеней переключения передач ICE посредством предоставления использования усиления электромотора для двигателей ICE внутреннего сгорания (ступени EV-переключения передач: 1-2 скорость, ступени ICE-переключения передач: 1-4 скорость). Ниже описывается конфигурация схемы переключения передач многоступенчатой зубчатой трансмиссии 1 на основе фиг. 3 и фиг. 4.
Используется принцип схемы переключения передач, в котором когда скорость VSP транспортного средства находится в начальной области, равной или меньшей заданной скорости транспортного средства VSP0, поскольку многоступенчатая зубчатая трансмиссия 1 не имеет элемента поглощения дифференциального вращения, запуск электромотора посредством только движущей силы электромотора выполняется в "EV-режиме", как проиллюстрировано на фиг. 3. После этого, в области движения, когда потребность в движущей силе является большой, используется "параллельный HEV-режим", в котором движущая сила двигателя усиливается посредством движущей силы электромотора, как проиллюстрировано на фиг. 3. Таким образом, по мере того, как скорость VSP транспортного средства увеличивается, ступени ICE-переключения передач переключаются с "(ICE первая ->) ICE вторая -> ICE третья -> ICE четвертая", и ступени EV-переключения передач переключаются с "EV первая -> EV вторая". Следовательно, на основе принципа схемы переключения передач, проиллюстрированного на фиг. 3, создается карта переключения передач для выдачи запросов на переключение передач для переключения схемы переключения передач.
Схемы переключения передач, получаемые посредством многоступенчатой зубчатой трансмиссии 1, имеющей зацепляющие муфты C1, C2 и C3, являются такими, как показано на фиг. 4. На фиг. 4, "блокировка" представляет схему взаимной блокировки, которая не является применимой в качестве схемы переключения передач, "EV-" представляет состояние, в котором первый электромотор/генератор MG1 не соединен с возможностью приведения в действие с ведущими колесами 19, и "ICE-" представляет состояние, в котором двигатель ICE внутреннего сгорания не соединен с возможностью приведения в действие с ведущими колесами 19. При управлении переключением передач, необязательно использовать все схемы переключения передач, показанные на фиг. 4, и конечно, можно выбирать из этих схем переключения передач согласно потребности. Ниже описывается каждая из схем переключения передач.
Когда вторая зацепляющая муфта C2 находится в "N", и третья зацепляющая муфта C3 находится в "N", следующие схемы переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV- ICEgen" получается, если первая зацепляющая муфта C1 находится в "левой позиции", "нейтраль" получается, если первая зацепляющая муфта C1 находится в "N", и "EV- ICE третья" получается, если первая зацепляющая муфта C1 находится в "правой позиции". Здесь, схема переключения передач "EV- ICEgen" представляет собой схему, выбранную во время выработки мощности в режиме холостого хода MG1, в которой мощность вырабатывается в первом электромоторе/генераторе MG1 посредством двигателя ICE внутреннего сгорания, когда транспортное средство остановлено, или во время двухприводной выработки мощности в режиме холостого хода, в которой выработка мощности MG2 выполняется в дополнение к выработке мощности MG1. Схема переключения передач "нейтраль" представляет собой схему, выбранную во время выработки мощности в режиме холостого хода MG2, в которой мощность вырабатывается во втором электромоторе/генераторе MG2 посредством двигателя ICE внутреннего сгорания, когда транспортное средство остановлено.
Когда вторая зацепляющая муфта C2 находится в "N", и третья зацепляющая муфта C3 находится в "левой позиции", следующие схемы переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV первая ICE первая" получается, если первая зацепляющая муфта C1 находится в "левой позиции", "EV первая ICE-" получается, если первая зацепляющая муфта C1 находится в "N", и "EV первая ICE третья" получается, если первая зацепляющая муфта C1 находится в "правой позиции". Здесь, схема переключения передач "EV первая ICE-" представляет собой схему "EV-режима", в которой двигатель ICE внутреннего сгорания остановлен, и движение выполняется посредством первого электромотора/генератора MG1, или схему для "последовательного HEV-режима", в которой EV-движение на первой скорости выполняется посредством первого электромотора/генератора MG1 в то время, когда мощность вырабатывается во втором электромоторе/генераторе MG2 посредством двигателя ICE внутреннего сгорания. Следовательно, например, при движении при выборе "последовательного HEV-режима" посредством "EV первая ICE-", первая зацепляющая муфта C1 переключается из "N" на "левую позицию", на основе замедления, вследствие недостаточной движущей силы. В этом случае, транспортное средство переводится в движение посредством "параллельного HEV-режима (первой скорости)" согласно схеме переключения передач "EV первая ICE первая", в которой движущая сила обеспечивается.
Когда вторая зацепляющая муфта C2 находится в "левой позиции", и третья зацепляющая муфта C3 находится в "левой позиции", "EV первая ICE вторая" получается, если позиция первой зацепляющей муфты C1 находится в "N". Следовательно, например, если требование по движущей силе увеличивается в ходе EV-движения на первой скорости при выборе "последовательного HEV-режима" посредством "EV первая ICE-", вторая зацепляющая муфта C2 переключается из "N" на "левую позицию". В этом случае, транспортное средство переводится в движение посредством "параллельного HEV-режима" согласно схеме переключения передач "EV первая ICE вторая", в которой обеспечивается движущая сила.
Когда вторая зацепляющая муфта C2 находится в "левой позиции", и третья зацепляющая муфта C3 находится в "N", следующие схемы переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV 1,5 ICE вторая" получается, если первая зацепляющая муфта C1 находится в "левой позиции", и "EV- ICE вторая" получается, если первая зацепляющая муфта C1 находится в "N".
Когда вторая зацепляющая муфта C2 находится в "левой позиции", и третья зацепляющая муфта C3 находится в "правой позиции", "EV вторая ICE вторая" получается, если позиция первой зацепляющей муфты C1 находится в "N". Следовательно, например, при движении в "параллельном HEV-режиме" при выборе схемы переключения передач "EV первая ICE вторая", третья зацепляющая муфта C3 переключается с "левой позиции" на "правую позицию" через "N", согласно запросу на переключение коробки передач "вверх". В этом случае, транспортное средство переводится в движение посредством "параллельного HEV-режима" согласно схеме переключения передач "EV вторая ICE вторая", в которой ступень EV-переключения передач задается равной второй скорости. Например, при движении в "параллельном HEV-режиме" при выборе схемы переключения передач "EV вторая ICE четвертая", вторая зацепляющая муфта C2 переключается с "правой позиции" на "левую позицию" через "N", согласно запросу на переключение коробки передач "вниз". В этом случае, транспортное средство переводится в движение посредством "параллельного HEV-режима" согласно схеме переключения передач "EV вторая ICE вторая", в которой ступень ICE-переключения передач задается равной второй скорости.
Когда вторая зацепляющая муфта C2 находится в "N", и третья зацепляющая муфта C3 находится в "правой позиции", следующие схемы переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV вторая ICE третья" получается, если первая зацепляющая муфта C1 находится в "левой позиции", "EV вторая ICE-" получается, если первая зацепляющая муфта C1 находится в "N", и "EV вторая ICE третья" получается, если первая зацепляющая муфта C1 находится в "правой позиции". Здесь, схема переключения передач "EV вторая ICE-" представляет собой схему "EV-режима", в которой двигатель ICE внутреннего сгорания остановлен, и движение выполняется посредством первого электромотора/генератора MG1, или схему для "последовательного HEV-режима", в которой EV-движение на второй скорости выполняется посредством первого электромотора/генератора MG1 в то время, когда мощность вырабатывается во втором электромоторе/генераторе MG2 посредством двигателя ICE внутреннего сгорания. Следовательно, например, при движении в "параллельном HEV-режиме" при выборе схемы переключения передач "EV вторая ICE вторая", вторая зацепляющая муфта C2 переключается из "правой позиции" на "N", и первая зацепляющая муфта C1 переключается из "N" на "правую позицию", согласно запросу на переключение коробки передач "вверх". В этом случае, транспортное средство переводится в движение посредством "параллельного HEV-режима" согласно схеме переключения передач "EV вторая ICE третья", в которой ступень ICE-переключения передач задается равной третьей скорости.
Когда вторая зацепляющая муфта C2 находится в "правой позиции", и третья зацепляющая муфта C3 находится в "правой позиции", "EV вторая ICE четвертая" получается, если позиция первой зацепляющей муфты C1 находится в "N".
Когда вторая зацепляющая муфта C2 находится в "правой позиции", и третья зацепляющая муфта C3 находится в "N", следующие схемы переключения передач получаются согласно позиции первой зацепляющей муфты C1. "EV 2,5 ICE четвертая" получается, если первая зацепляющая муфта C1 находится в "левой позиции", и "EV- ICE четвертая" получается, если первая зацепляющая муфта C1 находится в "N".
Когда вторая зацепляющая муфта C2 находится в "правой позиции", и третья зацепляющая муфта C3 находится в "левой позиции", "EV первая ICE четвертая" получается, если позиция первой зацепляющей муфты C1 находится в "N".
Конфигурация процесса управления переключением передач
Фиг. 5 иллюстрирует последовательность операций процесса управления переключением передач, выполняемого в модуле 23 управления трансмиссией (контроллере трансмиссии) первого варианта осуществления. Ниже описываются каждый из этапов на фиг. 5, который показывает один пример конфигурации процесса управления переключением передач. Этот процесс управления переключением передач начинается на основе запроса на переключение схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья", и выполняется поочередное переключение передач, в котором вторая зацепляющая муфта C2 расцепляется, и первая зацепляющая муфта C1 зацепляется.
На этапе S1, когда имеется запрос на переключение схемы переключения передач, либо когда на этапе S2 определено то, что вывод приведения в действие с усилением отсутствует, выводятся инструкция уменьшения крутящего момента в двигатель ICE внутреннего сгорания, а также инструкция увеличения крутящего момента в первый электромотор/генератор MG1, и процесс переходит к этапу S2.
Здесь, инструкция уменьшения крутящего момента в двигатель ICE внутреннего сгорания выводится до тех пор, пока крутящий момент ICE не становится нулевым, и нулевой крутящий момент поддерживается до тех пор, пока зацепление первой зацепляющей муфты C1 не завершится. Инструкция увеличения крутящего момента в первый электромотор/генератор MG1 выводится в крутящий момент MG1, который компенсирует движущую силу посредством усиления уменьшающегося крутящего момента ICE, и высокий компенсационный крутящий момент поддерживается до тех пор, пока зацепление первой зацепляющей муфты C1 не завершится.
На этапе S2, после вывода инструкций уменьшения крутящего момента ICE и увеличения крутящего момента MG1, определяется то, присутствует или нет вывод приведения в действие с усилением вследствие инструкции увеличения крутящего момента MG1 в первый электромотор/генератор MG1. В случае "Да" (вывод приведения в действие с усилением присутствует), процесс переходит к этапу S3, а если "Нет" (вывод приведения в действие с усилением отсутствует), процесс возвращается к этапу S1. Здесь, присутствие/отсутствие вывода приведения в действие с усилением определяется посредством управления временем посредством таймера, и период таймера задается равным заданному времени от времени t1 вывода команды расцепления кулачковой муфты (фиг. 10) до тех пор, пока кулачковая муфта не перейдет в расцепленное состояние. Конкретное заданное время является временем от момента, когда операция расцепления фактически начинается после команды расцепления кулачковой муфты, до момента, когда, параллельно этому, достигается "крутящий момент опускается -> пружина растягивается", и "сила расцепления прикладывается -> состояние, в котором крутящий момент уменьшается и зацепление прекращается", и период таймера определяется, например, посредством большого объема экспериментальных данных.
На этапе S3, после определения того, что вывод приведения в действие с усилением присутствует, на этапе S2, либо после определения того, что расцепление второй зацепляющей муфты C2 не закончено, на этапе S4, инструкция расцепления выводится во вторую зацепляющую муфту C2, и процесс переходит к этапу S4.
Здесь, инструкция расцепления во вторую зацепляющую муфту C2 представляет собой инструкцию, в которой задаваемая позиция второй зацепляющей муфты C2 принудительно перемещается из позиции зацепления в расцепленную позицию. Таким образом, позиция соединительной втулки 52 второй зацепляющей муфты C2 изменяется с позиции зацепления до достижения расцепленной позиции, посредством модуля сервоуправления позицией, который передает электрический ток во второй электрический актуатор 32.
На этапе S4, после вывода инструкции расцепления C2 на этапе S3, определяется то, закончено или нет расцепление второй зацепляющей муфты C2. В случае "Да" (расцепление C2 закончено), процесс переходит к этапу S5, а если "Нет" (расцепление C2 не закончено), процесс возвращается к этапу S3. Здесь, определяется, что расцепление второй зацепляющей муфты C2 закончено, когда сигнал позиции втулки из датчика 82 позиции второй втулки достигает расцепленной позиции.
На этапе S5, после определения того, что расцепление C2 не закончено, на этапе S4, или, определения того, что вращение C1 является асинхронным, на этапе S8, или определения того, что зацепление C1 не закончено, на этапе S10, задается целевая частота вращения MG2, и процесс переходит к этапу S6.
Здесь, "целевая частота вращения MG2" означает целевую частоту вращения электромотора для второго электромотора/генератора MG2 для перевода первой зацепляющей муфты C1, которая расцепляется в схеме переключения передач до переключения передач и зацепляется в схеме переключения передач после переключения передач, в состояние синхронизации вращения. Таким образом, "целевая частота вращения MG2" представляет собой частоту вращения электромотора, которая соответствует частоте вращения при определении синхронизации для задания фактической частоты дифференциального вращения первой зацепляющей муфты C1 в качестве целевой частотой дифференциального вращения. "Частота вращения при определении синхронизации" задается равной не нулевой частоте вращения для определения законченной синхронизации вращения, а вместо этого, частоте дифференциального вращения, которая исключает контакт зубьев между верхними поверхностями зубьев при достижении плавной операции зацепления первой зацепляющей муфты C1.
Целевая частота (ωT) вращения MG2 задается на основе следующей формулы (1), с использованием частоты (ωO) вращения выходного передаточного вала многоступенчатой зубчатой трансмиссии 1 и передаточного отношения (GL) из вращательного вала MG2 в выходной передаточный вал.
ωT=GL*ωO ... (1)
"Передаточное отношение (GL) из вращательного вала MG2 в выходной передаточный вал" в формуле (1) является полным передаточным отношением из вращательного вала MG2 (= шестой вал 16) в выходной передаточный вал (= третий вал 13), когда первая зацепляющая муфта C1 находится в позиции "справа", и она становится "EV вторая ICE третья". Таким образом, передаточное отношение задается согласно тракту из "шестой вал 16 (= вращательный вал MG2) -> пятнадцатая шестерня 115 -> четырнадцатая шестерня 114 -> четвертый вал 14 -> первая муфта C1 -> двенадцатая шестерня 112 -> вторая шестерня 102 -> шестая шестерня 106 -> третий вал 13 (= выходной передаточный вал)". Помимо этого, "частота (ωO) вращения выходного передаточного вала" в формуле (1) является выходным значением датчика 73 частоты вращения выходного передаточного вала, предоставленным в конечную позицию третьего вала 13. Таким образом, "целевая частота вращения MG2" для перевода первой зацепляющей муфты C1, которая должна зацепляться, в состояние синхронизации вращения получается посредством преобразования с использованием частоты (ωO) вращения выходного передаточного вала, которая является значением, которое не изменяется до и после переключения передач (= эквивалентное значение скорости транспортного средства), и передаточным отношением (GL) после переключения передач при условии зацепления C1 (= синхронизация вращения). Расцепление первой зацепляющей муфты C1, которая зацепляется после переключения передач, определяется посредством значения датчика позиции втулки из датчика 81 позиции первой втулки в расцепленной позиции.
На этапе S6, после задания целевой частоты вращения MG2 на этапе S5, задаются FB-усиление Kp пропорционального элемента и FB-усиление Ki интегрального элемента, которые должны использоваться при выполнении FB-управления по частоте вращения для второго электромотора/генератора MG2, и процесс переходит к этапу S7.
Здесь, при задании FB-усилений Kp, Ki, вычисляется абсолютное значение частоты дифференциального вращения |ε|=|(ωR)-(ωT)| между фактической частотой (ωR) вращения электромотора для второго электромотора/генератора MG2 и целевой частотой (ωT) вращения MG2, заданной на этапе S5. Фактическая частота (ωR) вращения электромотора является выходным значением датчика 76 частоты вращения MG2, предоставленного на валу второго электромотора (= шестому валу 16) второго электромотора/генератора MG2.
Затем FB-усиления определяются посредством использования характеристик FB-усиления, проиллюстрированных на фиг. 6 или фиг. 7. Таким образом, в области, в которой абсолютное значение |ε| частоты дифференциального вращения превышает |ε1|, FB-усиления Kp, Ki задаются равными постоянному значению в пределе стабильности FB-управления по частоте вращения. В области, в которой абсолютное значение |ε| частоты дифференциального вращения меньше |ε1|, FB-усиления Kp, Ki уменьшаются пропорционально уменьшению абсолютного значения |ε| частоты дифференциального вращения.
Тем не менее, при использовании характеристик по фиг. 6, FB-усиления Kp, Ki также уменьшаются до нуля, когда абсолютное значение |ε| частоты дифференциального вращения уменьшается до 0. С другой стороны, при использовании характеристик по фиг. 7, когда абсолютное значение |ε| частоты дифференциального вращения уменьшается до |ε2|, небольшие значения FB-усилений Kp, Ki во время |ε2| поддерживаются в области между |ε2| до |ε|=0. Фактическая частота (ωR) вращения электромотора определяется посредством датчика 76 частоты вращения MG2.
На этапе S7, после задания FB-усиления на этапе S6, выполняется FB-управление по частоте вращения для второго электромотора/генератора MG2, и процесс переходит к этапу S8.
Здесь, FB-управление по частоте вращения для второго электромотора/генератора MG2 представляет собой управление, при котором фактическая частота (ωR) вращения электромотора для второго электромотора/генератора MG2 сходится к целевой частоте (ωT) вращения MG2, заданной на этапе S5.
Кроме того, фактический крутящий момент (ωR) электромотора управляется с возможностью сопоставлять целевую частоту (ωT) вращения электромотора посредством задания значения команды управления крутящим моментом электромотора для второго электромотора/генератора MG2 с крутящим моментом (TM) электромотора, полученным посредством следующей формулы (2).
TM={(Kps-Ki)/s}x(ωT-ωR) ... (2)
"s" в вышеописанной формуле (2) представляет собой оператор дифференцирования. При выполнении FB-управления по частоте вращения для второго электромотора/генератора MG2, значения, заданные на этапе S6, используются для FB-усилений Kp, Ki. В таком случае, крутящий момент (TM) электромотора, вычисленный посредством формулы (2), представляет собой "крутящий FB-момент".
На этапе S8, после FB-управления частоты вращения MG2 на этапе S7, определяется то, определена или нет синхронизация вращения первой зацепляющей муфты C1. В случае "Да" (синхронизация вращения C1), процесс переходит к этапу S9, а если "Нет" (асинхронное вращение C1), процесс возвращается к этапу S3.
Здесь, синхронизация вращения C1 определяется на основе того, поддерживается или нет состояние, в котором абсолютное значение |ε| частоты дифференциального вращения меньше частоты вращения при определении синхронизации, которая является пороговым значением определения, в течение заданного периода времени.
На этапе S9, после определения синхронизации вращения C1 на этапе S8, инструкция зацепления выводится в первую зацепляющую муфту C1, и процесс переходит к этапу S10.
Здесь, инструкция зацепления в первую зацепляющую муфту C1 представляет собой инструкцию, при которой принудительно обеспечивается ход задаваемой позиции первой зацепляющей муфты C1 из расцепленной позиции в позицию зацепления. Таким образом, позиция соединительной втулки 51 первой зацепляющей муфты C1 изменяется с расцепленной позиции до достижения позиции зацепления посредством модуля сервоуправления позицией, который передает электрический ток в первый электрический актуатор 31.
На этапе S10, после инструкции зацепления C1 на этапе S9, определяется то, закончено или нет зацепление первой зацепляющей муфты C1 посредством зацепления. В случае "Да" (зацепление C1 закончено), процесс переходит к этапу S11, а если "Нет" (зацепление C1 не закончено), процесс возвращается к этапу S5.
Здесь, определяется, что зацепление первой зацепляющей муфты C1 закончено, когда сигнал позиции втулки из датчика 84 позиции первой втулки достигает позиции зацепления.
На этапе S11, после определения того, что зацепление C1 закончено, на этапе S10, FB-управление по частоте вращения для второго электромотора/генератора MG2 прекращается, управление переходит к управлению крутящим моментом, и процесс переходит к концу.
Здесь, когда синхронное зацепление первой муфты C1 завершается, режим управления второго электромотора/генератора MG2 возвращается с FB-управления по частоте вращения к исходному управлению крутящим моментом посредством крутящего момента MG2. Затем крутящий момент ICE двигателя ICE внутреннего сгорания увеличивается относительно нулевого крутящего момента, и крутящий момент MG1 первого электромотора/генератора MG1 уменьшается относительно крутящего момента гарантирования движущей силы, так что полный крутящий момент из крутящего момента ICE и крутящего момента MG1 совпадает с требуемой движущей силой.
Далее описываются операции.
Ниже отдельно описываются "операция процесса управления переключением передач", "операция управления переключением передач" и "характерная операция управления переключением передач", относительно операций устройства управления трансмиссией гибридного транспортного средства согласно первому варианту осуществления.
Операция процесса управления переключением передач
Ниже описывается операция процесса управления переключением передач при переключении схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья", на основе блок-схемы последовательности операций способа, показанной на фиг. 5.
Когда имеется запрос на переключение со схемы переключения передач "EV вторая ICE вторая" на схему переключения передач "EV вторая ICE третья", процесс переходит от "этапа S1 -> этапа S2" на блок-схеме последовательности операций способа по фиг. 5. В то время, когда определяется, что вывод приведения в действие с усилением отсутствует, на этом этапе S2, последовательность операций, переходящая от "этапа S1 -> этапа S2", повторяется, и на этапе S1, инструкция уменьшения крутящего момента выводится в двигатель ICE внутреннего сгорания, и инструкция увеличения крутящего момента выводится в первый электромотор/генератор MG1.
После этого, когда определяется то, что вывод приведения в действие с усилением присутствует на этапе S2, процесс переходит от этапа S2 к "этапу S3 -> этапу S4". Далее, в то время когда определяется, что расцепление C2 не закончено, на этапе S4, последовательность операций, которая переходит от "этапа S3 -> этапа S4", повторяется, и на этапе S3, инструкция расцепления выводится во вторую зацепляющую муфту C2.
После этого, когда определяется то, что расцепление C2 закончено, на этапе S4, режим управления второго электромотора/генератора MG2 переключается с управления крутящим моментом на FB-управление по частоте вращения, и процесс переходит от "этапа S5 -> этапа S6 -> этапа S7 -> этапа S8". В то время, когда определяется, что вращение C1 является асинхронным, на этапе S8, последовательность операций, переходящая от "этапа S5 -> этапа S6 -> этапа S7 -> этапа S8", повторяется. В этой последовательности операций, целевая частота вращения MG2 задается на этапе S5, FB-усиления Kp, Ki задаются в соответствии с абсолютным значением частоты дифференциального вращения на этапе S6, и FB-управление по частоте вращения для второго электромотора/генератора MG2 выполняется на этапе S7.
После этого, когда синхронизация вращения C1 определяется на этапе S8, процесс переходит от этапа S8 к "этапу S9 -> этапу S10". В то время, когда определяется, что зацепление C1 не закончено, на этом этапе S10, последовательность операций, которая переходит от "этапа S5 -> этапа S6 -> этапа S7 -> этапа S8 -> этапа S9 -> этапа S10", повторяется, и на этапе S9, инструкция зацепления выводится в первую зацепляющую муфту C1. Если определено то, что вращение C1 является асинхронным, на этапе S8, который находится в середине этой последовательности операций, процесс переходит от "этапа S5 -> этапа S6 -> этапа S7 -> этапа S8". Таким образом, до тех пор, пока не определяется то, что зацепление первой зацепляющей муфты C1 закончено, FB-управление по частоте вращения для второго электромотора/генератора MG2 выполняется на этапе S7, на основе задания целевой частоты вращения MG2 на этапе S5 и задания FB-усилений Kp, Ki согласно абсолютному значению частоты дифференциального вращения на этапе S6.
После этого, когда определяется то, что зацепление C1 закончено, на этапе S10, процесс переходит от этапа S10 к этапу S11, и на этапе S11, FB-управление по частоте вращения для второго электромотора/генератора MG2 прекращается, и управление переходит к управлению крутящим моментом.
Операция управления переключением передач
Ниже описывается операция управления переключением передач согласно одному примеру переключения передач со схемы переключения передач "EV вторая ICE вторая" на схему переключения передач "EV вторая ICE третья", на основе фиг. 8-10.
Во-первых, описывается поток крутящего момента MG1 и крутящего момента ICE в многоступенчатой зубчатой трансмиссии 1, когда выбирается схема переключения передач "EV вторая ICE вторая", на основе фиг. 8.
В схеме переключения передач "EV вторая ICE вторая", первая зацепляющая муфта C1 находится в N-позиции, вторая зацепляющая муфта C2 находится в позиции "слева", и третья зацепляющая муфта C3 находится в позиции "справа". Следовательно, крутящий момент MG1 протекает из первого электромотора/генератора MG1 во второй вал 12 -> четвертая шестерня 104 -> девятая шестерня 109 -> третий вал 13 -> седьмая шестерня 107 -> шестнадцатая шестерня 116 -> дифференциал 17 -> ведущий вал 18 -> ведущие колеса 19.
С другой стороны, крутящий момент ICE протекает из двигателя ICE внутреннего сгорания в первый вал 11 -> третья шестерня 103 -> восьмая шестерня 108 -> третий вал 13 -> седьмая шестерня 107 -> шестнадцатая шестерня 116 -> дифференциал 17 -> ведущий вал 18 -> ведущие колеса 19.
Далее описывается поток крутящего момента MG1 и крутящего момента ICE в многоступенчатой зубчатой трансмиссии 1, когда выбирается схема переключения передач "EV вторая ICE третья", на основе фиг. 9.
В схеме переключения передач "EV вторая ICE третья", первая зацепляющая муфта C1 находится в позиции "справа", вторая зацепляющая муфта C2 находится в "N-позиции", и третья зацепляющая муфта C3 находится в позиции "справа". Следовательно, крутящий момент MG1 протекает из первого электромотора/генератора MG1 во второй вал 12 -> четвертая шестерня 104 -> девятая шестерня 109 -> третий вал 13 -> седьмая шестерня 107 -> шестнадцатая шестерня 116 -> дифференциал 17 -> ведущий вал 18 -> ведущие колеса 19, таким же образом, как фиг. 8.
С другой стороны, крутящий момент ICE протекает из двигателя ICE внутреннего сгорания в первый вал 11 -> первая шестерня 101 -> одиннадцатая шестерня 111 -> четвертый вал 14 -> двенадцатая шестерня 112 -> вторая шестерня 102 -> шестая шестерня 106 -> третий вал 13 -> седьмая шестерня 107. Кроме того, крутящий момент ICE протекает из седьмой шестерни 107 в шестнадцатую шестерню 116 -> дифференциал 17 -> ведущий вал 18 -> ведущие колеса 19.
Как описано выше, переключение схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья" достигается посредством расцепления второй зацепляющей муфты C2 из позиции "слева" в "N"-позицию и зацепления первой зацепляющей муфты C1 из N-позиции" в позицию "справа". Ниже описывается операция переключения схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья" на основе фиг. 10.
На фиг. 10, время t1 является временем запроса на переключение схемы переключения передач. Время t2 является временем изменения задаваемой позиции второй зацепляющей муфты C2. Время t3 является временем начала расцепления второй зацепляющей муфты C2. Время t4 является временем завершения расцепления второй зацепляющей муфты C2. Время t5 является временем изменения задаваемой позиции первой зацепляющей муфты C1. Время t6 является временем начала зацепления первой зацепляющей муфты C1. Время t7 является временем завершения зацепления первой зацепляющей муфты C1. Время t8 является временем завершения переключения схемы переключения передач. Время t2 - время t3 является мертвым временем задержки реакции второй зацепляющей муфты C2, и время t5 - время t6 является мертвым временем задержки реакции первой зацепляющей муфты C1.
Когда имеется запрос на переключение схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья" во время t1, уменьшение крутящего момента ICE из двигателя ICE внутреннего сгорания и увеличение крутящего момента MG1 из первого электромотора-генератора MG1 начинается. После этого, когда крутящий момент MG1 изменяется с отрицательного крутящего момента на положительный крутящий момент, так что он становится выводом приведения в действие с усилением во время t2, задаваемая позиция для второй зацепляющей муфты C2 переключается с зацепления (слева) на расцепление. Затем соединительная втулка 52 второй зацепляющей муфты C2 начинает ход с позиции зацепления во время t3, и соединительная втулка 52 второй зацепляющей муфты C2 достигает расцепленной позиции во время t4.
Таким образом, время в течение времени t2 - времени t4 задается в качестве интервала расцепления второй зацепляющей муфты C2, и незначительная флуктуация в характеристике продольной составляющей G наблюдается в интервале между временем t3 - временем t4. Затем во время t4, режим управления второго электромотора/генератора MG2 переключается с управления крутящим моментом на FB-управление по частоте вращения.
В течение времени t4 завершения расцепления второй зацепляющей муфты C2, как проиллюстрировано в характеристике частоты вращения (число об.), частота дифференциального вращения (= частота дифференциального вращения входного-выходного вала C1) между фактической частотой вращения электромотора (= характеристика MG2) и целевой частотой вращения электромотора (= целевое число об.) значительно расходится, и перемещение при зацеплении первой зацепляющей муфты C1 не может начинаться. Следовательно, в интервале от времени t4 до времени t5, выполняется FB-управление по частоте вращения для второго электромотора/генератора MG2 с использованием FB-усилений Kp, Ki, заданных в соответствии с абсолютным значением |ε| частоты дифференциального вращения. При этом FB-управлении по частоте вращения, посредством вывода команды управления отрицательным крутящим моментом электромотора для подавления фактической частоты вращения электромотора, фактическая частота вращения электромотора (= характеристика MG2) уменьшается и приближается к целевой частоте вращения электромотора (целевому числу об.), имеющей пологий направленный вверх градиент, и ширина расхождения частоты дифференциального вращения уменьшается с течением времени от времени t4 до времени t5. После этого, когда состояние синхронизации вращения C1 определяется во время t5, задаваемая позиция для первой зацепляющей муфты C1 переключается с расцепления на зацепление (справа). Затем соединительная втулка 51 первой зацепляющей муфты C1 начинает ход с N-позиции во время t5, и верхние поверхности собачек 51b, 57b первой зацепляющей муфты C1 примыкают и начинают вводиться в зацепление во время t6. Кроме того, соединительная втулка 51 первой зацепляющей муфты C1 завершает перемещение для ввода в зацепление и зацепление и достигает позиции завершения зацепления во время t7.
Таким образом, интервал от времени t4 до времени t7 задается в качестве интервала FB-управления по частоте вращения для второго электромотора/генератора MG2, в течение которого выполняется FB-управление по частоте вращения для изменения большого FB-усиления на небольшое FB-усиление. Затем время в течение времени t5 - времени t7 задается в качестве интервала зацепления первой зацепляющей муфты C1, и для интервала зацепления, незначительная флуктуация в характеристике продольной составляющей G наблюдается в интервале между временем t6 - временем t7. Затем во время t7, режим управления второго электромотора/генератора MG2 переключается с FB-управления по частоте вращения на управление крутящим моментом.
Когда вторая зацепляющая муфта C2 возвращается к управлению крутящим моментом во время t7 завершения зацепления первой зацепляющей муфты C1, крутящий момент MG2 второго электромотора/генератора MG2 возвращается к нулю. На фиг. 10, крутящий момент MG2 возвращается к нулю, но он может принудительно вырабатывать мощность или выполнять подачу питания, в зависимости от состояния вождения. Затем крутящий момент ICE двигателя ICE внутреннего сгорания увеличивается с нулевого крутящего момента, и крутящий момент MG1 первого электромотора/генератора MG1 уменьшается с крутящего момента гарантирования движущей силы, и переключение схемы переключения передач завершается во время t8, когда полный крутящий момент из крутящего момента ICE и крутящего момента MG1 совпадает с требуемой движущей силой.
Характерная операция управления переключением передач
Первый вариант осуществления имеет такую конфигурацию, в которой при выполнении FB-управления по частоте вращения для первого электромотора/генератора MG1 во время запроса на переключение передач на ступень переключения передач, на которой первая зацепляющая муфта C1 зацепляется, эффективность FB-управления по частоте вращения задается меньше по сравнению со временем до начала зацепления, когда зацепление первой зацепляющей муфты C1 начинается.
Таким образом, инструкция зацепления выводится, когда FB-управление по частоте вращения приводит к тому, что частота дифференциального вращения первой зацепляющей муфты C1 находится в пределах диапазона частот вращения при определении синхронизации. Соединительная втулка 51 первой зацепляющей муфты C1 начинает ход в направлении зацепления на основе инструкции зацепления, и противостоящие собачки 51b, 57b начинают зацепление в промежуточной позиции хода. Когда первая зацепляющая муфта C1 переходит в состояние зацепления, фактическая частота дифференциального вращения первой зацепляющей муфты C1 становится нулевой, и отклонение частот вращения, которое составляет разность между фактической частотой дифференциального вращения и целевой частотой дифференциального вращения, продолжает формироваться при условии, что первая зацепляющая муфта C1 поддерживает состояние зацепления. После этого, когда отклонение частот вращения продолжает формироваться в первой зацепляющей муфте C1, FB-управление по частоте вращения должно пытаться выводить высокий крутящий FB-момент, чтобы увеличивать фактическую частоту дифференциального вращения первой зацепляющей муфты C1 (нулевую частоту вращения) до частоты вращения при определении синхронизации, которая представляет собой целевую частоту дифференциального вращения. В частности, при интегральном FB-управлении для FB-управления по частоте вращения, если отклонение частот вращения остается, компонент отклонения каждого цикла управления накапливается, и крутящий FB-момент увеличивается с течением времени после того, как первая зацепляющая муфта C1 переходит в зацепленное состояние. Таким образом, когда первая зацепляющая муфта C1 переходит в зацепленное состояние, крутящий FB-момент становится высоким крутящим моментом за короткий период времени.
Тем не менее, когда зацепление первой зацепляющей муфты C1 начинается, эффективность FB-управления по частоте вращения задается меньше по сравнению со временем до начала зацепления. Соответственно, даже когда первая зацепляющая муфта C1 переходит в состояние зацепления, и отклонение частот вращения продолжает формироваться, вывод крутящего FB-момента посредством FB-управления по частоте вращения подавляется до низкого.
Как результат, можно уменьшать толчок транспортного средства, вызываемый посредством крутящего FB-момента, выводимого вследствие FB-управления по частоте вращения, во время переключения схемы переключения передач для зацепления первой зацепляющей муфты C1, на основе определения синхронизации вращения.
Первый вариант осуществления имеет такую конфигурацию, в которой когда зацепление первой зацепляющей муфты C1 начинается, FB-усиления Kp, Ki, используемые при FB-управлении по частоте вращения, задаются меньше по сравнению со временем до начала зацепления. Таким образом, поскольку крутящий FB-момент, который выводится посредством FB-управления по частоте вращения, становится крутящим моментом, соответствующим значению, полученному посредством умножения FB-усилений Kp, Ki на отклонение частот вращения, даже если отклонение частот вращения продолжает формироваться, с одной стороны, крутящий FB-момент становится небольшим, если FB-усиления Kp, Ki являются небольшими значениями, с другой стороны. Когда FB-усиления Kp, Ki снижаются посредством начала зацепления первой зацепляющей муфты C1, FB-усиления Kp, Ki снижаются от времени до того, как противостоящие собачки 51b, 57b первой зацепляющей муфты C1 входят в контакт, что обеспечивает следующие преимущества.
Во-первых, посредством уменьшения FB-усилений Kp, Ki посредством начала зацепления первой зацепляющей муфты C1, высокоточное средство определения зацепления (датчик) для определения момента, в который противостоящие собачки 51b, 57b первой зацепляющей муфты C1 входят в физический контакт, становится необязательным.
Во-вторых, если изменение эффективности FB-усилений Kp, Ki задерживается относительно контакта противостоящих собачек 51b, 57b первой зацепляющей муфты C1, формирование толчка не может исключаться. Тем не менее, посредством уменьшения FB-усилений Kp, Ki посредством начала зацепления первой зацепляющей муфты C1, можно исключать формирование толчка заранее с допустимым запасом времени.
Первый вариант осуществления имеет такую конфигурацию, в которой когда FB-управление по частоте вращения для второго электромотора/генератора MG2 начинается, FB-управление по частоте вращения с использованием FB-усилений Kp, Ki, заданных как меньшие значения по мере того, как абсолютное значение |ε| частоты дифференциального вращения снижается, выполняется до тех пор, пока не определяется то, что зацепление первой зацепляющей муфты C1 закончено.
Таким образом, после того, как FB-управление по частоте вращения для второго электромотора/генератора MG2 начинается, и первая зацепляющая муфта C1 переходит в состояние зацепления, абсолютное значение |ε| частоты дифференциального вращения становится нулевым, и FB-усиления Kp, Ki, используемые при FB-управлении по частоте вращения, становятся наименьшими значениями, включающими в себя нуль (фиг. 6, фиг. 7). После этого FB-управление по частоте вращения с наименьшим значением, включающим в себя нуль, продолжает выполняться до тех пор, пока не определяется то, что зацепление первой зацепляющей муфты C1 закончено. Соответственно, можно надежно уменьшать толчок транспортного средства, вызываемый посредством крутящего FB-момента, который выводится вследствие FB-управления по частоте вращения для второго электромотора/генератора MG2.
В первом варианте осуществления, на этапе S6 по фиг. 5, когда абсолютное значение |ε| частоты дифференциального вращения находится в диапазоне, который превышает |ε1|, значения усиления задаются равными предельному диапазону стабильности FB-управления по частоте вращения. Затем FB-усиления Kp, Ki задаются согласно характеристике, в которой значение усиления снижается вместе с уменьшением абсолютного значения |ε| частоты дифференциального вращения, когда абсолютное значение |ε| частоты дифференциального вращения становится равным или меньше |ε1|. Таким образом, в области, в которой абсолютное значение |ε| частоты дифференциального вращения превышает |ε1|, FB-усиления задаются равными значениям усиления в предельном диапазоне стабильности FB-управления по частоте вращения; в силу этого частота дифференциального вращения первой зацепляющей муфты C1 уменьшается в направлении сходимости с хорошей реакцией без снижения стабильности FB-управления по частоте вращения.
С другой стороны, при переходе в область, в которой абсолютное значение |ε| частоты дифференциального вращения меньше |ε1|, посредством задания значений усиления, которые постепенно уменьшаются вместе с уменьшением абсолютного значения |ε| частоты дифференциального вращения, зацепление первой зацепляющей муфты C1 начинается в состоянии, в котором формирование крутящего FB-момента подавляется.
Следовательно, могут одновременно достигаться обеспечение реакции по синхронизации вращения первой зацепляющей муфты C1 и уменьшение толчка транспортного средства, вызываемого посредством крутящего FB-момента.
Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться посредством устройства управления трансмиссией гибридного транспортного средства согласно первому варианту осуществления.
(1) Трансмиссия (многоступенчатая зубчатая трансмиссия 1), которая достигает множества ступеней переключения передач (схемы переключения передач), предоставляется в приводной системе от источника мощности (двигателя ICE внутреннего сгорания, первого электромотора/генератора MG1, второго электромотора/генератора MG2) на ведущие колеса 19. Трансмиссия (многоступенчатая зубчатая трансмиссия 1) имеет зацепляющие муфты C1, C2 и C3 в качестве элементов переключения передач, которые зацепляются посредством перемещения из расцепленной позиции, с тем чтобы переключаться между ступенями переключения передач. В этом транспортном средстве (гибридном транспортном средстве), выполняется FB-управление по частоте вращения для электромотора (второго электромотора/генератора MG2), соединенного с зацепляющей муфтой (первой зацепляющей муфтой C1), когда имеется запрос на переключение передач на ступень переключения передач, на которой зацепляющая муфта (первая зацепляющая муфта C1) зацепляется. Контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 5) предоставляется для вывода инструкции зацепления в зацепляющую муфту (первую зацепляющую муфту C1), когда частота дифференциального вращения зацепляющей муфты (первой зацепляющей муфты C1) переходит в пределы диапазона частоты вращения при определении синхронизации.
После выполнения FB-управления по частоте вращения для электромотора (второго электромотора/генератора MG2), контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 5) задает эффективность FB-управления по частоте вращения меньшей по сравнению со временем до начала зацепления, когда зацепление зацепляющей муфты (первой зацепляющей муфты C1) начинается.
Как результат, можно уменьшать толчок транспортного средства, вызываемый посредством крутящего FB-момента, который выводится вследствие FB-управления по частоте вращения, во время переключения передач, когда зацепляющая муфта (первая зацепляющая муфта C1) зацепляется (во время переключения схемы переключения передач многоступенчатой зубчатой трансмиссии 1), на основе определения синхронизации вращения.
(2) Когда зацепление зацепляющей муфты (первой зацепляющей муфты C1) начинается, контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 5) уменьшает FB-усиления Kp, Ki, используемые при FB-управлении по частоте вращения в электромоторе (втором электромоторе/генераторе MG2), таким образом, что они меньше по сравнению со временем до начала зацепления.
Соответственно, помимо преимущества (1), высокоточное средство определения зацепления (датчик) становится необязательным, и можно исключать формирование толчка, вызываемого посредством задержки в изменении эффективности FB-усилений Kp, Ki посредством уменьшения FB-усилений Kp, Ki, когда зацепление начинается.
(3) Контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 5) имеет секцию задания первого FB-усиления (этап S6), которая задает FB-усиления Kp, Ki равным меньшим значениям по мере того, как уменьшается абсолютное значение |ε| частоты дифференциального вращения между фактической частотой (ωR) вращения электромотора для электромотора (второго электромотора/генератора MG2) и целевой частотой (ωT) вращения электромотора, соответствующей частоте вращения при определении синхронизации зацепляющей муфты (первой зацепляющей муфты C1.
Когда FB-управление по частоте вращения для электромотора (второго электромотора/генератора MG2) начинается, FB-управление по частоте вращения с использованием FB-усилений Kp, Ki, заданных посредством секции задания первого FB-усиления (этап S6), выполняется до тех пор, пока не определяется то, что зацепление зацепляющей муфты (первой зацепляющей муфты C1) закончено.
Соответственно, помимо преимущества (2), можно надежно уменьшать толчок транспортного средства, вызываемый посредством крутящего FB-момента, который выводится вследствие FB-управления по частоте вращения для электромотора (второго электромотора/генератора MG2).
(4) Секция задания первого FB-усиления (этап S6) задает значения усиления в предельном диапазоне стабильности FB-управления по частоте вращения в области, в которой абсолютное значение |ε| частоты дифференциального вращения превышает заданное значение |ε1|. Когда абсолютное значение |ε| частоты дифференциального вращения становится равным или меньше заданного значения |ε1|, FB-усиления Kp, Ki задаются согласно характеристике, которая уменьшает значение усиления вместе с уменьшением абсолютного значения |ε| частоты дифференциального вращения (фиг. 6, фиг. 7).
Следовательно, помимо преимущества (3), может одновременно достигаться обеспечение реакции по синхронизации вращения зацепляющей муфты (первой зацепляющей муфты C1) и уменьшение толчка транспортного средства, вызываемого посредством крутящего FB-момента.
Второй вариант осуществления изобретения
Второй вариант осуществления является примером, в котором FB-управление по частоте вращения посредством второго электромотора/генератора MG2 прекращается, когда зацепление первой зацепляющей муфты C1 начинается.
Поскольку "общая конфигурация системы" "конфигурация системы управления переключением передач" и "конфигурация схем переключения передач" устройства управления трансмиссией гибридного транспортного средства согласно второму варианту осуществления являются конфигурациями, идентичными конфигурациям, показанным на фиг. 1-4 первого варианта осуществления, их чертежи и описания опускаются. Ниже описывается "конфигурация процесса управления переключением передач" второго варианта осуществления на основе фиг. 11.
Конфигурация процесса управления переключением передач
Фиг. 11 иллюстрирует последовательность операций процесса управления переключением передач, выполняемого в модуле 23 управления трансмиссией (средстве управления переключением передач) второго варианта осуществления. Ниже описываются каждый из этапов на фиг. 11, который показывает один пример конфигурации процесса управления переключением передач. Поскольку каждый из этапов для "этапов S21-S25" и "этапов S27-S29" представляют собой этапы, которые выполняют процессы, идентичные процессам каждого из этапов для "этапов S1-S5" и "этапов S7-S9" на фиг. 5, их описания опускаются.
На этапе S26, после задания целевой частоты вращения MG2 на этапе S25, задаются FB-усиление Kp пропорционального элемента и FB-усиление Ki интегрального элемента, которые должны использоваться при выполнении FB-управления по частоте вращения для второго электромотора/генератора MG2, и процесс переходит к этапу S27.
Здесь, при задании FB-усилений Kp, Ki, FB-усиления Kp, Ki задаются равными постоянному значению в пределе стабильности FB-управления по частоте вращения, независимо от абсолютной величины абсолютного значения |ε| частоты дифференциального вращения.
На этапе S30, после инструкции зацепления C1 на этапе S29, FB-управление по частоте вращения для второго электромотора/генератора MG2 прекращается, управление переходит к управлению крутящим моментом, и процесс переходит к этапу S31.
Как результат, управляющий крутящий момент для второго электромотора/генератора MG2 в конечный момент времени, в который выполнено FB-управление по частоте вращения, продолжает инструктироваться. Тем не менее, если транспортное средство ускоряется или замедляется, целевая частота вращения электромотора изменяется согласно скорости транспортного средства. Соответственно, управляющий крутящий момент для второго электромотора/генератора MG2 задается равным значению, полученному посредством суммирования крутящего момента для того, чтобы реализовывать величину изменения целевой частоты вращения электромотора, с управляющим крутящим моментом для второго электромотора/генератора MG2 в конечный момент времени, в который выполнено FB-управление по частоте вращения.
Таким образом, значение команды управления крутящим моментом электромотора, которое реализует крутящий момент (TM) электромотора, вычисленный на основе следующей формулы (3), выводится.
TM=Jm*dωT ... (3)
"Jm" в вышеприведенной формуле (3) является инерцией из второго электромотора/генератора MG2 во входной участок первой зацепляющей муфты C1, и "dωT" является дифференциальным значением целевой частоты (ωT) вращения входного вала, заданным на этапе S25.
На этапе S31, после перехода к управлению крутящим моментом на этапе S30, определяется то, закончено или нет зацепление первой зацепляющей муфты C1 посредством зацепления. Если "Да" (зацепление C1 закончено), процесс переходит к концу, а если "Нет" (зацепление C1 не закончено), определение этапа S31 повторяется.
Далее описываются операции.
Ниже отдельно описываются "операция процесса управления переключением передач", "операция управления переключением передач" и "характерная операция управления переключением передач", относительно операций устройства управления трансмиссией гибридного транспортного средства согласно второму варианту осуществления.
Операция процесса управления переключением передач
Ниже описывается операция процесса управления переключением передач при переключении схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья", на основе блок-схемы последовательности операций способа, показанной на фиг. 11. Поскольку процессы "этапов S21-S24" являются идентичными первому варианту осуществления, их описания опускаются.
Когда определяется то, что расцепление C2 закончено, на этапе S24, режим управления второго электромотора/генератора MG2 переключается с управления крутящим моментом на FB-управление по частоте вращения, и процесс переходит от "этапа S25 -> этапа S26 -> этапа S27 -> этапа S28". В то время, когда определяется, что вращение C1 является асинхронным, на этапе S28, последовательность операций, переходящая от "этапа S25 -> этапа S26 -> этапа S27 -> этапа S28", повторяется.
В этой последовательности операций, целевая частота вращения MG2 задается на этапе S25, FB-усиления Kp, Ki посредством постоянных значений задаются на этапе S26, и FB-управление по частоте вращения для второго электромотора/генератора MG2 выполняется на этапе S27.
После этого, когда синхронизация вращения C1 определяется на этапе S28, процесс переходит от "этапа S28 -> этапа S29 -> этапа S30 -> этапа S31". В этой последовательности операций, инструкция зацепления выводится в первую зацепляющую муфту C1 на этапе S29, FB-управление по частоте вращения для второго электромотора/генератора MG2 прекращается, и управление переходит к управлению крутящим моментом на этапе S30, и на этапе S31 определяется то, закончено или нет зацепление первой зацепляющей муфты C1. После этого, когда на этапе S31 определяется то, что зацепление C1 закончено, процесс переходит к концу.
Операция управления переключением передач
Переключение схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья" достигается посредством расцепления второй зацепляющей муфты C2 из позиции "слева" в "N"-позицию и зацепления первой зацепляющей муфты C1 из N-позиции" в позицию "справа", идентично первому варианту осуществления. Ниже описывается операция переключения схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья" во втором варианте осуществления на основе фиг. 12.
На фиг. 12, время t1 является временем запроса на переключение схемы переключения передач. Время t2 является временем изменения задаваемой позиции второй зацепляющей муфты C2. Время t3 является временем начала расцепления второй зацепляющей муфты C2. Время t4 является временем завершения расцепления второй зацепляющей муфты C2. Время t5 является временем изменения задаваемой позиции первой зацепляющей муфты C1. Время t6 является временем начала зацепления первой зацепляющей муфты C1. Время t7 является временем завершения зацепления первой зацепляющей муфты C1. Время t8 является временем завершения переключения схемы переключения передач. Время t2 - время t3 является мертвым временем задержки реакции второй зацепляющей муфты C2, и время t5 - время t6 является мертвым временем задержки реакции первой зацепляющей муфты C1. Поскольку от "времени t1 - времени t4" является идентичным первому варианту осуществления по фиг. 10, его описание опускается.
В течение времени t4 завершения расцепления второй зацепляющей муфты C2, как проиллюстрировано в характеристике частоты вращения (число об.), частота дифференциального вращения (= частота дифференциального вращения входного-выходного вала C1) между фактической частотой вращения электромотора (= характеристика MG2) и целевой частотой вращения электромотора (= целевое число об.) значительно расходится, и ход зацепления первой зацепляющей муфты C1 не может начинаться. Следовательно, в интервале от времени t4 до времени t5, выполняется FB-управление по частоте вращения для второго электромотора/генератора MG2 с использованием FB-усилений Kp, Ki, заданных равными постоянным значениям, независимо от абсолютного значения частоты дифференциального вращения. При этом FB-управлении по частоте вращения, посредством вывода команды управления отрицательным крутящим моментом электромотора для подавления фактической частоты вращения электромотора, фактическая частота вращения электромотора (= характеристика MG2) уменьшается и приближается к целевой частоте вращения электромотора (= целевому числу об.), имеющей пологий направленный вверх градиент, и ширина расхождения частоты дифференциального вращения уменьшается с течением времени от времени t4 до времени t5. После этого, когда состояние синхронизации вращения C1 определяется во время t5, задаваемая позиция для первой зацепляющей муфты C1 переключается с расцепления на зацепление (справа).
Таким образом, интервал от времени t4 до времени t5 задается в качестве интервала FB-управления по частоте вращения для второго электромотора/генератора MG2, в течение которого выполняется FB-управление по частоте вращения посредством большого FB-усиления. Затем во время t5, режим управления второго электромотора/генератора MG2 переключается с FB-управления по частоте вращения на управление крутящим моментом. Во время t5, при переключении на управление крутящим моментом, крутящий момент MG2 второго электромотора/генератора MG2 возвращается к нулю ко времени t8. На фиг. 12, крутящий момент MG2 возвращается к нулю, но он может принудительно вырабатывать мощность или выполнять подачу питания, в зависимости от состояния вождения.
Соединительная втулка 51 первой зацепляющей муфты C1 начинает ход с N-позиции во время t5, и верхние поверхности собачек 51b, 57b первой зацепляющей муфты C1 примыкают и начинают вводиться в зацепление во время t6. Кроме того, соединительная втулка 51 первой зацепляющей муфты C1 завершает ход ввода в зацепление и зацепления и достигает позиции завершения зацепления во время t7. Во время t7, когда зацепление первой зацепляющей муфты C1 закончено, крутящий момент ICE двигателя ICE внутреннего сгорания увеличивается с нулевого крутящего момента, и крутящий момент MG1 первого электромотора/генератора MG1 уменьшается с крутящего момента гарантирования движущей силы. Затем переключение схемы переключения передач завершается во время t8, когда полный крутящий момент из крутящего момента ICE и крутящего момента MG1 совпадает с требуемой движущей силой. Таким образом, время в течение времени t5 - времени t7 задается в качестве интервала зацепления первой зацепляющей муфты C1 посредством управления крутящим моментом, и для интервала зацепления, незначительная флуктуация в характеристике продольной составляющей G наблюдается в интервале между временем t6 - временем t7.
Характерная операция управления переключением передач
Второй вариант осуществления имеет такую конфигурацию, в которой FB-управление по частоте вращения для второго электромотора/генератора MG2 прекращается, когда зацепление первой зацепляющей муфты C1 начинается.
Таким образом, посредством прекращения FB-управления по частоте вращения для второго электромотора/генератора MG2, когда зацепление первой зацепляющей муфты C1 начинается, крутящий FB-момент посредством FB-управления по частоте вращения не формируется. За счет этого можно предотвращать толчок в транспортном средстве, вызываемый посредством крутящего FB-момента.
Второй вариант осуществления имеет такую конфигурацию, в которой когда FB-управление по частоте вращения для второго электромотора/генератора MG2 начинается, FB-управление по частоте вращения с использованием FB-усилений Kp, Ki согласно значениям в предельном диапазоне стабильности FB-управления по частоте вращения выполняется до тех пор, пока зацепление первой зацепляющей муфты C1 не начинается.
Таким образом, посредством выполнения FB-управления по частоте вращения с использованием FB-усилений Kp, Ki с высокими значениями до тех пор, пока зацепление первой зацепляющей муфты C1 не начинается, можно обеспечивать схождение дифференциального вращения первой зацепляющей муфты C1 в диапазоне частот вращения при определении синхронизации с хорошей реакцией.
Второй вариант осуществления имеет такую конфигурацию, в которой зацепление первой зацепляющей муфты C1 считается начавшимся, когда инструкция зацепления выводится в первую зацепляющую муфту C1. Таким образом, с учетом того, что зацепление первой зацепляющей муфты C1 начато в то время, когда инструкция зацепления выводится в первую зацепляющую муфту C1, и прекращение FB-управления по частоте вращения, получаются следующие преимущества.
Во-первых, посредством прекращения FB-управления по частоте вращения, когда инструкция зацепления выводится, высокоточное средство определения зацепления (датчик) для определения момента, в который противостоящие собачки 51b, 57b первой зацепляющей муфты C1 входят в физический контакт, становится необязательным.
Во-вторых, если прекращение FB-управления по частоте вращения задерживается относительно контакта противостоящих собачек 51b, 57b первой зацепляющей муфты C1, формирование толчка не может исключаться. Тем не менее, посредством прекращения FB-управления по частоте вращения, когда инструкция зацепления выводится, можно исключать формирование толчка, вызываемого посредством крутящего FB-момента, заранее с допустимым запасом времени.
Другие операции являются идентичными первому варианту осуществления, так что их описания опускаются.
Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться посредством устройства управления трансмиссией гибридного транспортного средства согласно второму варианту осуществления.
(5) Когда зацепление зацепляющей муфты (первой зацепляющей муфты C1) начинается, контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 11) прекращает FB-управление по частоте вращения для электромотора (второго электромотора/генератора MG2).
Соответственно, помимо вышеуказанного преимущества (1), можно надежно предотвращать формирование толчка транспортного средства, вызываемого посредством крутящего FB-момента.
(6) Контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 11) имеет секцию задания второго FB-усиления (этап S26), которая задает FB-усиления Kp, Ki равными значениям усиления в предельном диапазоне стабильности FB-управления по частоте вращения, независимо от абсолютного значения |ε| частоты дифференциального вращения зацепляющей муфты (первой зацепляющей муфты C1).
Когда FB-управление по частоте вращения для электромотора (второго электромотора/генератора MG2) начинается, FB-управление по частоте вращения с использованием FB-усилений Kp, Ki, заданных посредством секции задания второго FB-усиления (этап S26), выполняется до тех пор, пока зацепление зацепляющей муфты (первой зацепляющей муфты C1) не начинается.
Соответственно, помимо вышеуказанного преимущества (5), можно обеспечивать схождение дифференциального вращения зацепляющей муфты (первой зацепляющей муфты C1) в диапазоне частот вращения при определении синхронизации с хорошей реакцией, когда FB-управление по частоте вращения для электромотора (второго электромотора/генератора MG2) начинается.
(7) Контроллер трансмиссии (модуль 23 управления трансмиссией, фиг. 11) считает зацепление зацепляющей муфты (первой зацепляющей муфты C1) начавшимся, когда инструкция зацепления выводится в зацепляющую муфту (первую зацепляющую муфту C1).
Соответственно, помимо вышеуказанных преимуществ (1)-(6), высокоточное средство определения зацепления (датчик) становится необязательным, и можно выполнять управление изменением эффективности FB-управления по частоте вращения, чтобы исключать формирование толчка, вызываемого посредством крутящего FB-момента, заранее с допустимым запасом времени, когда выводится инструкция зацепления.
Устройство управления трансмиссией транспортного средства настоящего изобретения описано выше на основе первого и второго вариантов осуществления, но его конкретные конфигурации не ограничены этими вариантами осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
В первом и втором вариантах осуществления, показан пример управления переключением передач посредством перехода с переключением схемы переключения передач с "EV вторая ICE вторая" на "EV вторая ICE третья" посредством расцепления второй зацепляющей муфты C2 и зацепления первой зацепляющей муфты C1. Тем не менее, контроллер трансмиссии может использовать управление переключением передач посредством перехода с переключением схемы переключения передач с "EV первая ICE-" -> "EV первая ICE вторая", с "EV первая ICE вторая" -> "EV вторая ICE вторая", с "EV вторая ICE четвертая" -> "EV первая ICE вторая" либо с "EV первая ICE-" -> "EV первая ICE первая". Помимо этого, возможно множество переходов с переключением схемы переключения передач, сопровождающих зацепление посредством перемещения влево или вправо любой из первой зацепляющей муфты C1, второй зацепляющей муфты C2 и третьей зацепляющей муфты C3, которые могут быть примерно разделены на две категории.
Во-первых, когда первая зацепляющая муфта C1 и вторая зацепляющая муфта C2 зацепляются, FB-управление по частоте вращения выполняется посредством второго электромотора/генератора MG2.
Во-вторых, когда третья зацепляющая муфта C3 зацепляется, FB-управление по частоте вращения выполняется посредством первого электромотора/генератора MG1.
В таком случае, хотя контент управления, выполняемого до и после FB-управления по частоте вращения, отличается в зависимости от контента перехода с переключением схемы переключения передач, во всех случаях, операции FB-управления по частоте вращения и последующего зацепления зацепляющей муфты являются такими, как показано на блок-схеме последовательности операций способа, проиллюстрированной на фиг. 5 или фиг. 11.
В первом и втором вариантах осуществления, показан пример, в котором контроллер трансмиссии считает зацепление первой зацепляющей муфты C1 начавшимся, когда инструкция зацепления выводится в зацепляющую муфту. Тем не менее, средство управления переключением передач может использовать пример, в котором зацепление зацепляющей муфты считается начавшимся в данный момент или во время непосредственно перед тем, как собачки входят в контакт, при условии что можно определять момент или во время непосредственно перед тем, как противостоящие собачки зацепляющей муфты входят в физический контакт.
В первом варианте осуществления, показан пример, в котором контроллер трансмиссии используется FB-усиления Kp, Ki, заданные равными меньшим значениям по мере того, как уменьшается абсолютное значение |ε| частоты дифференциального вращения при выполнении FB-управления по частоте вращения до тех пор, пока зацепление первой зацепляющей муфты C1 не завершится. Тем не менее, средство управления переключением передач может быть примером, в котором первое FB-усиление с высоким значением используется до тех пор, пока не начинается зацепление зацепляющей муфты, и второе FB-усиление со значением ниже первого FB-усиления используется, когда зацепление зацепляющей муфты начинается, при выполнении FB-управления по частоте вращения до тех пор, пока зацепление зацепляющей муфты не завершится.
В первом и втором вариантах осуществления, показан пример, в котором трансмиссия содержит три зацепляющих муфты C1, C2 и C3 и представляет собой многоступенчатую зубчатую трансмиссию 1 с нормальным зацеплением, имеющую множество зубчатых пар с различными передаточными отношениями. Тем не менее, трансмиссия не ограничена многоступенчатой зубчатой трансмиссией 1, показанной в первом и втором вариантах осуществления, и может представлять собой любую трансмиссию, которая достигает множества ступеней переключения передач, и которая имеет зацепляющую муфту в качестве элемента переключения передач, который зацепляется посредством перемещения из расцепленной позиции, с тем чтобы переключаться между ступенями переключения передач.
В первом и втором вариантах осуществления, показан пример, в котором устройство управления переключением передач настоящего изобретения применяется к гибридному транспортному средству, содержащему один двигатель, два электромотора/генератора и многоступенчатую зубчатую трансмиссию, имеющую три зацепляющих муфты, в качестве компонентов приводной системы. Тем не менее, устройство управления трансмиссией настоящего изобретения настоящего изобретения может применяться к другим гибридным транспортным средствам, содержащим, например, один двигатель, один электромотор-генератор и трансмиссию, имеющую зацепляющую муфту, в качестве компонентов приводной системы. Дополнительно, устройство управления трансмиссией также может применяться к транспортным средствам с электроприводом, таким как электротранспортные средства и транспортные средства на топливных элементах, которые содержат два электромотора/генератора и зацепляющую муфту. Дополнительно, устройство управления трансмиссией также может применяться к оснащенному двигателем транспортному средству, содержащему двигатель в качестве источника мощности, электромотор-генератор для синхронизации вращения и трансмиссию, имеющую зацепляющую муфту.
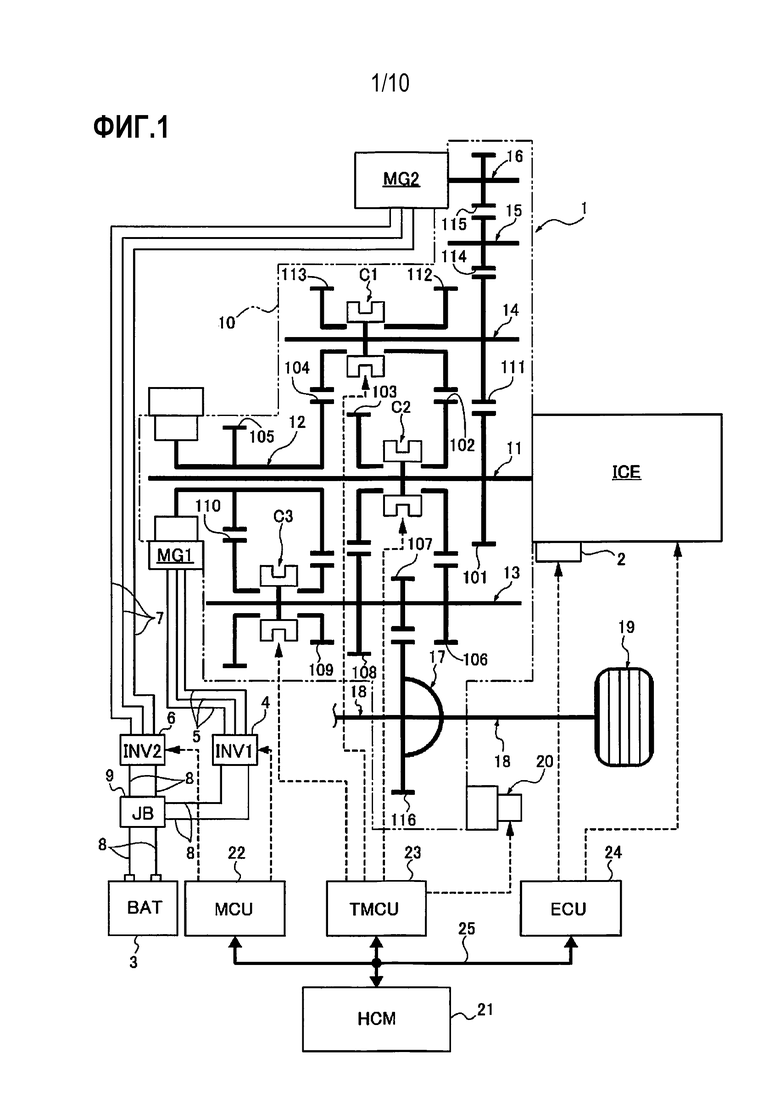
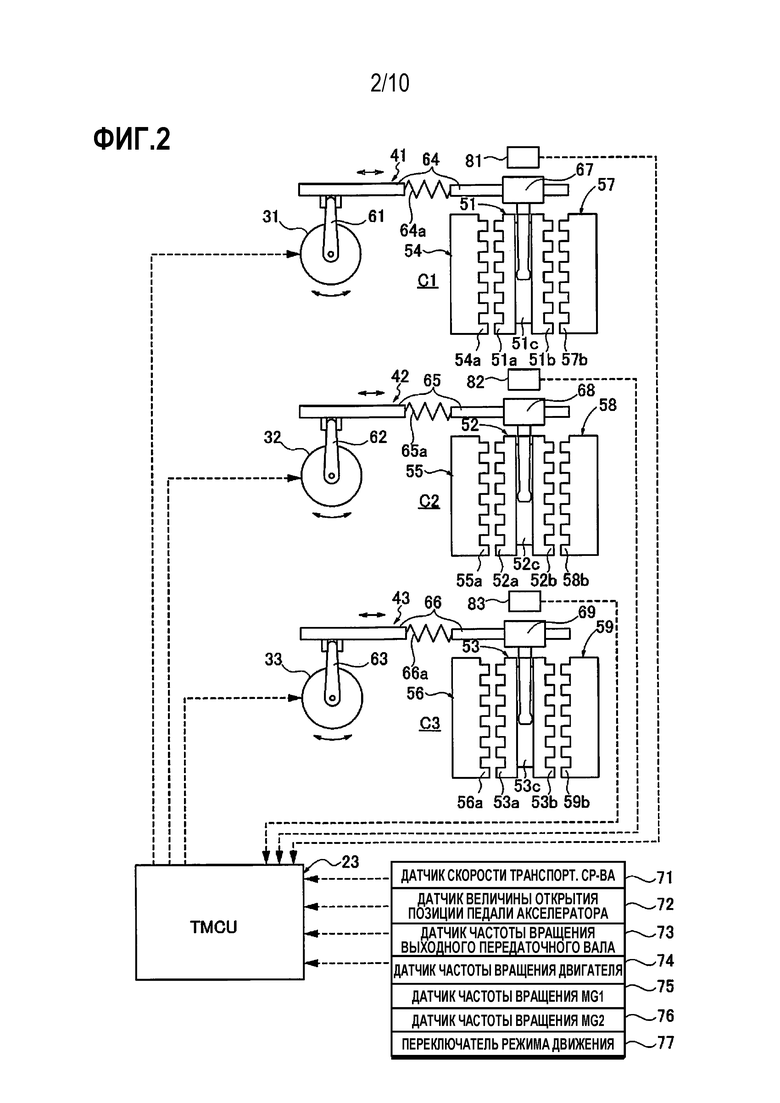
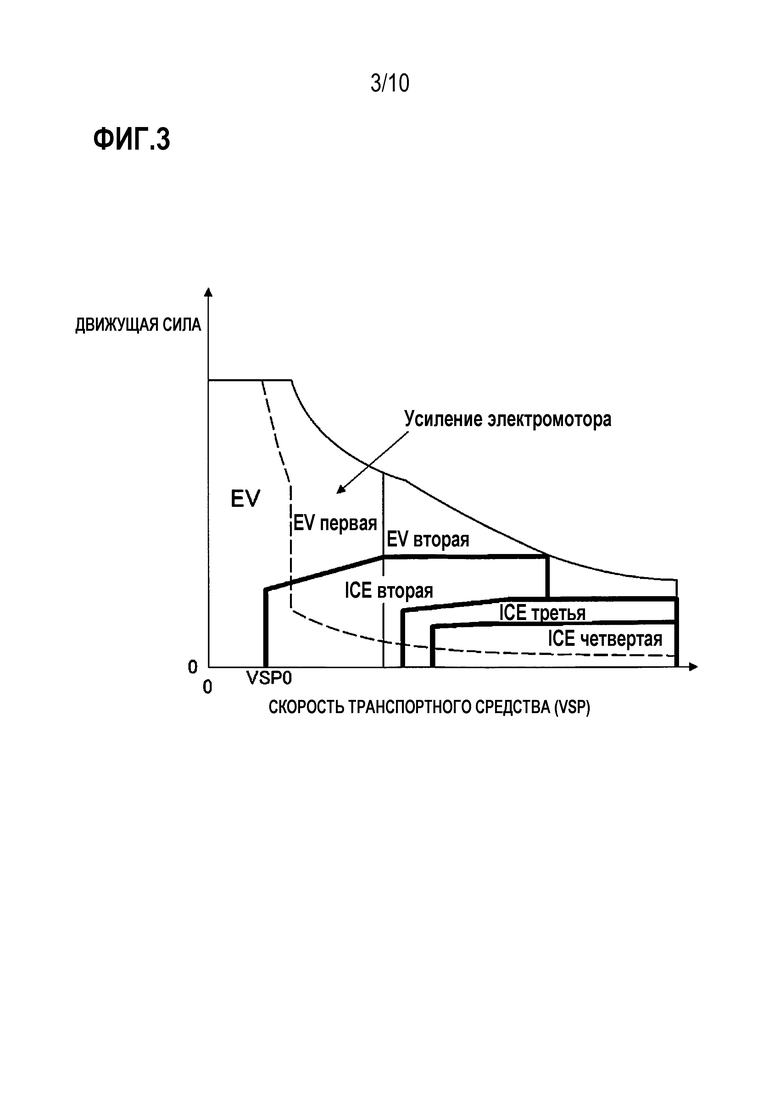
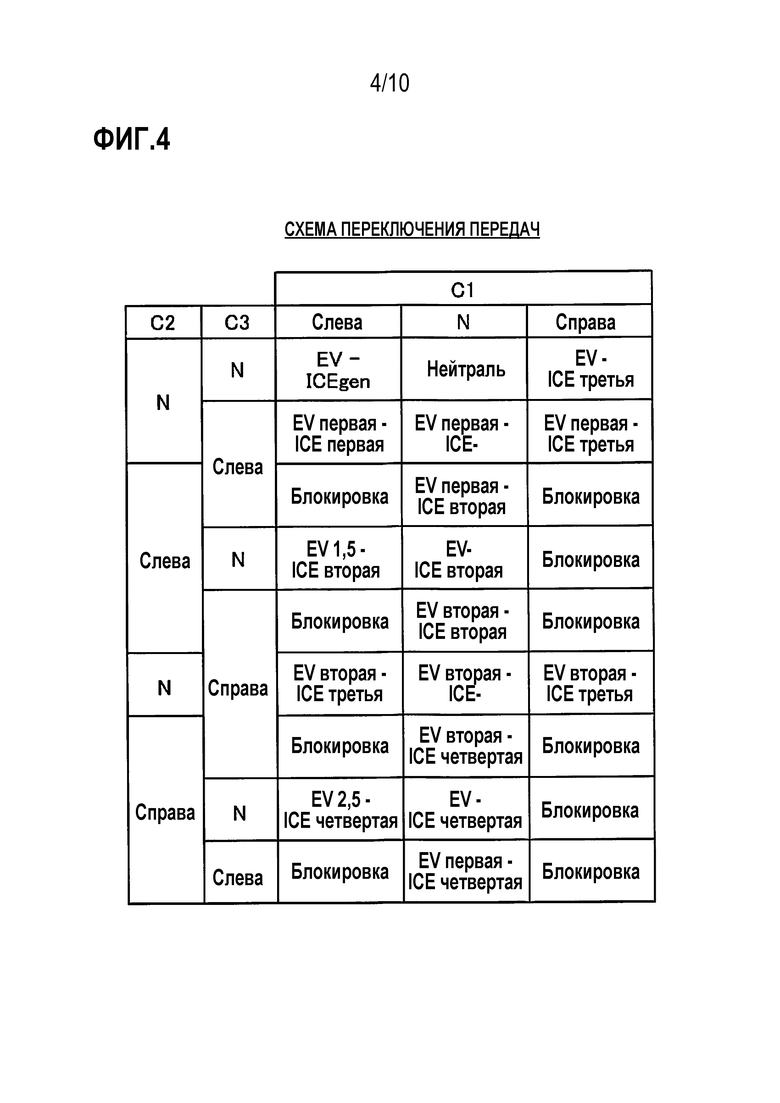

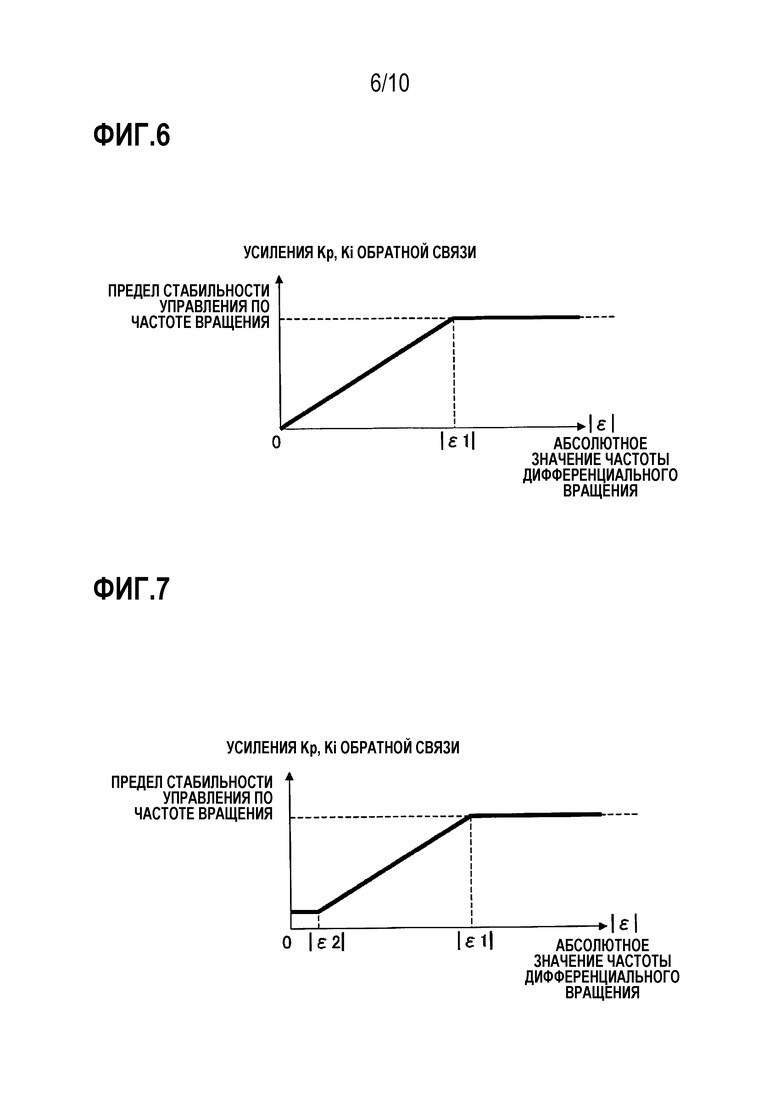
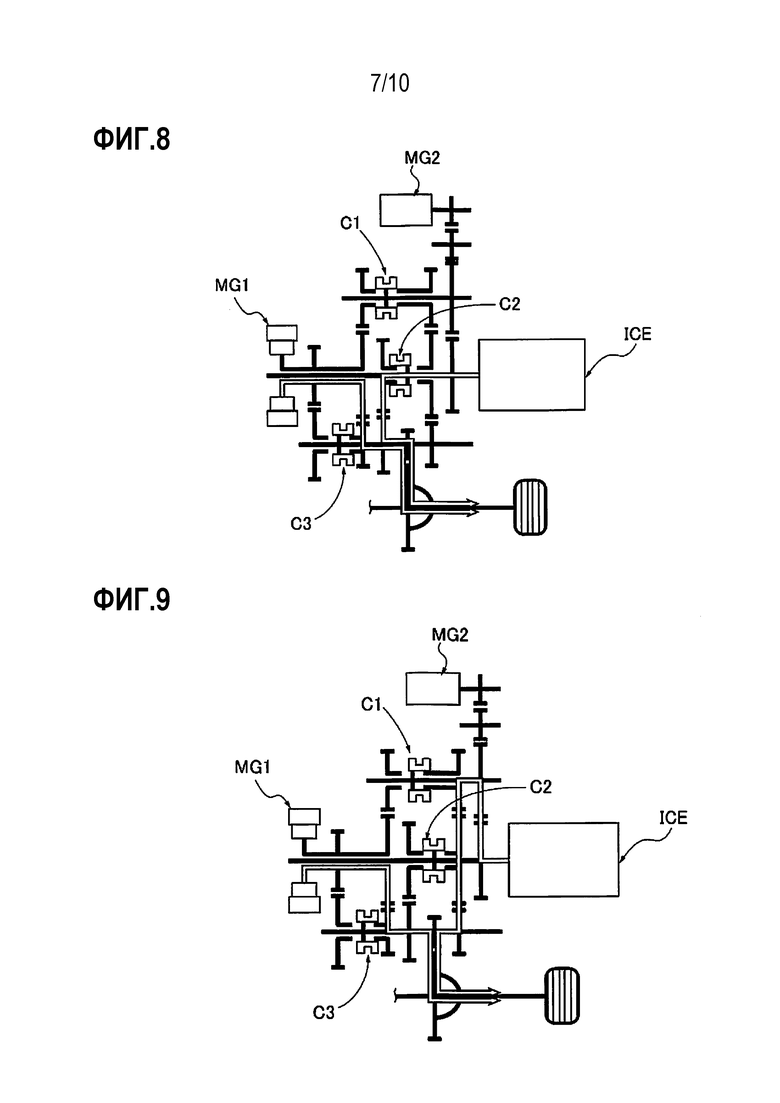
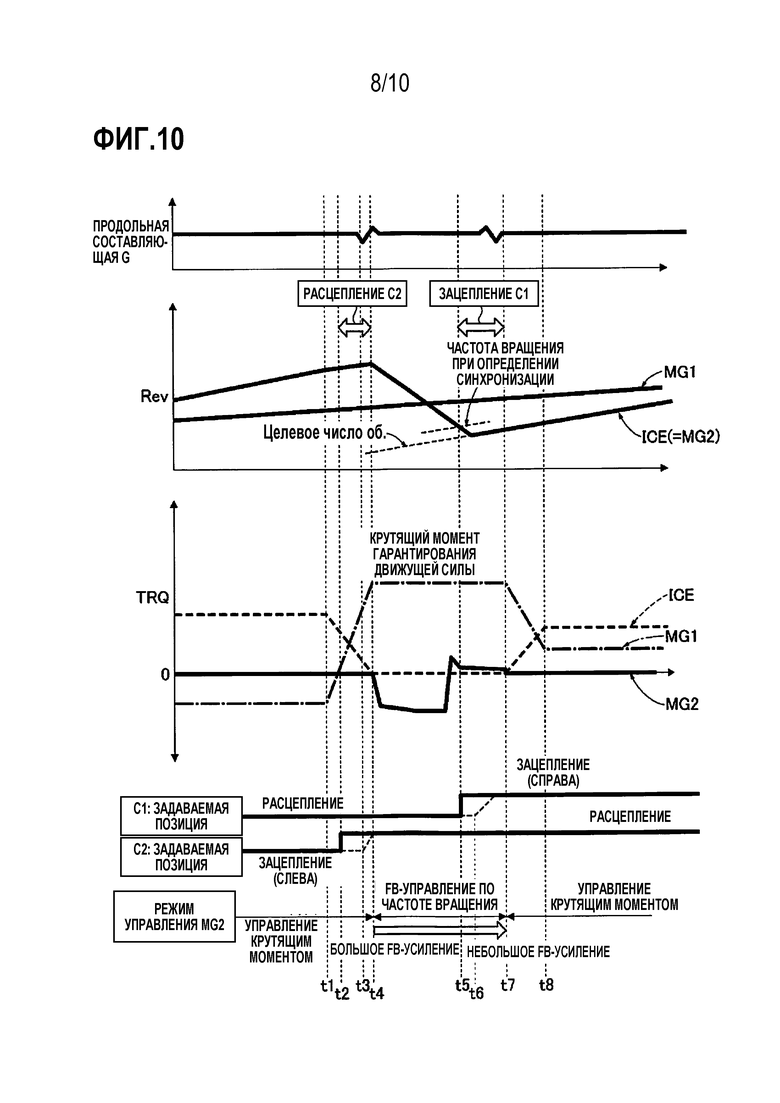
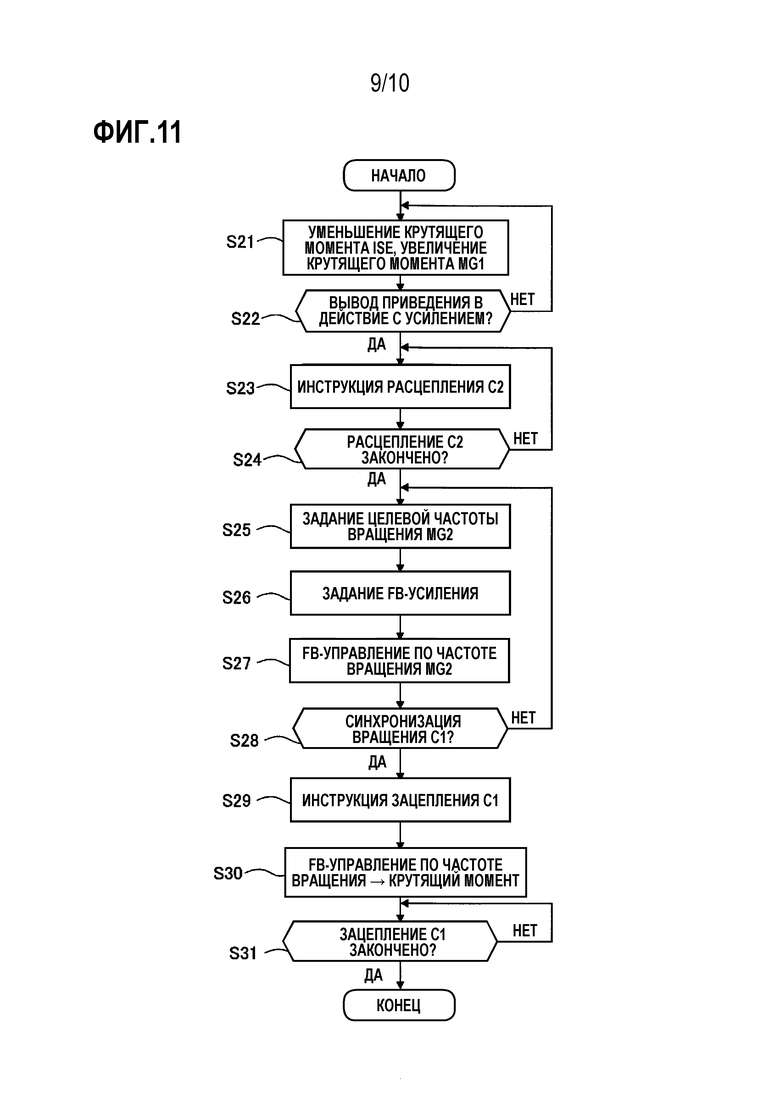
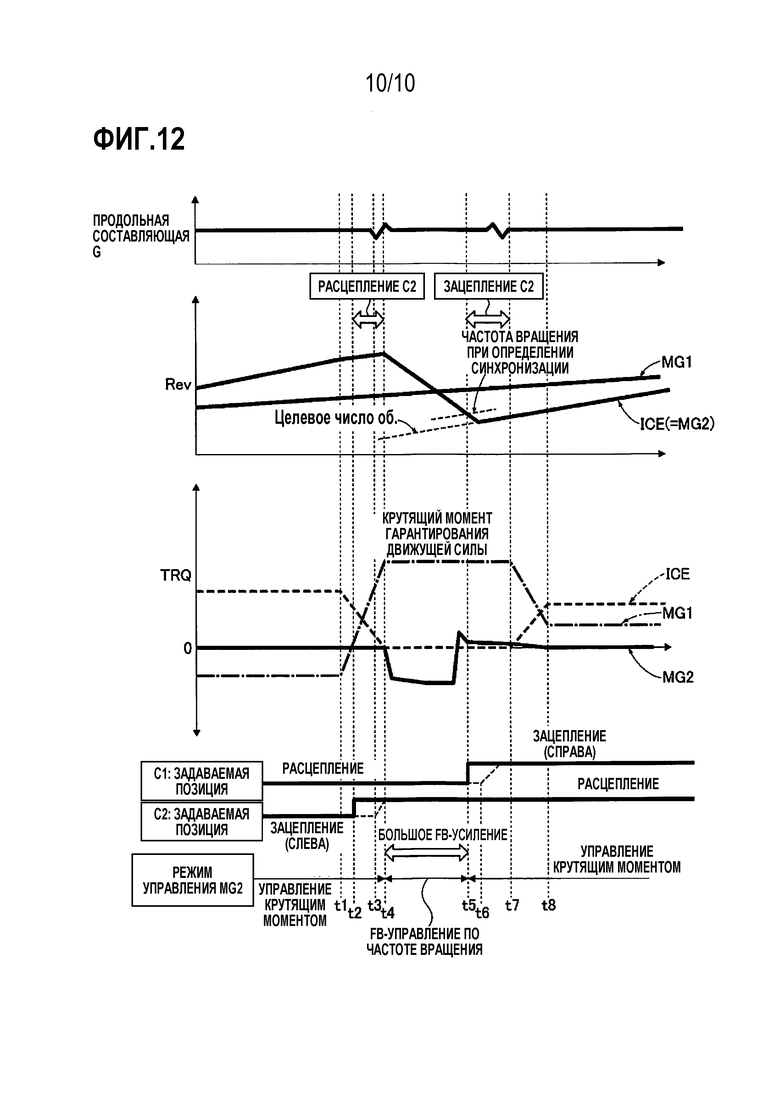
Изобретение относится к трансмиссиям транспортных средств. Устройство управления трансмиссией транспортного средства содержит контроллер, выполняющий управление с обратной связью по частоте вращения относительно электромотора, соединенного с зацепляющей муфтой, во время запроса на переключение передач. Также контроллер выводит инструкцию зацепления в зацепляющую муфту, когда частота дифференциального вращения муфты попадает в пределы диапазона частоты вращения при определении синхронизации, которая задана равной заданной частоте дифференциального вращения, которая не является нулевой частотой вращения. Управление с обратной связью выводит крутящий момент обратной связи, чтобы приводить фактическую частоту вращения электромотора к целевой частоте, соответствующей частоте при определении синхронизации. После выполнения управления с обратной связью контроллер уменьшает эффективность управления с обратной связью по частоте вращения для начала зацепления зацепляющей муфты по сравнению с моментом до начала зацепления. Повышается плавность хода. 6 з.п. ф-лы, 12 ил.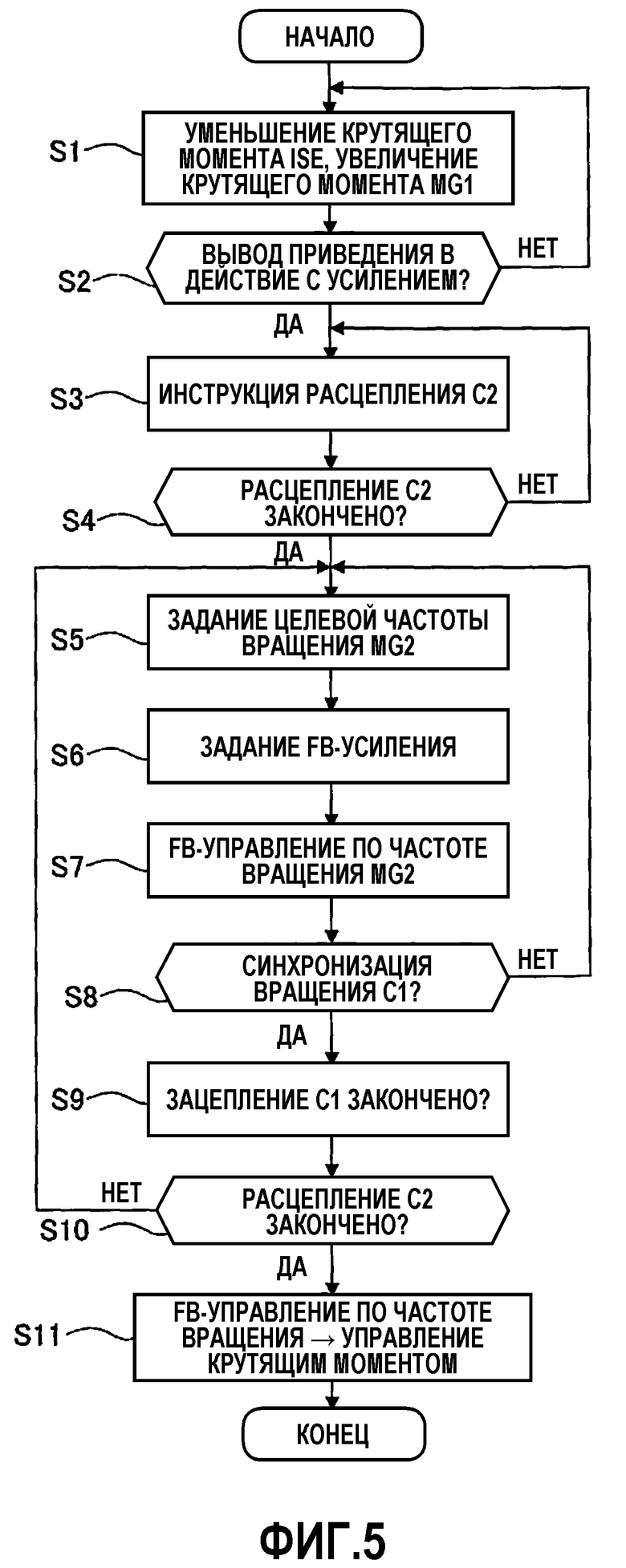
1. Устройство управления трансмиссией транспортного средства для транспортного средства, имеющего трансмиссию c множеством ступеней переключения передач в приводной системе от источника мощности на ведущее колесо, при этом трансмиссия имеет зацепляющую муфту в качестве элемента переключения передач, который зацепляется посредством перемещения из расцепленной позиции для переключения между ступенями переключения передач, содержащее:
контроллер трансмиссии, который выполняет управление с обратной связью по частоте вращения относительно электромотора, соединенного с зацепляющей муфтой, во время запроса на переключение передач на ступень переключения передач, на которой зацепляется зацепляющая муфта, и выводит инструкцию зацепления в зацепляющую муфту, когда частота дифференциального вращения зацепляющей муфты попадает в пределы диапазона частоты вращения при определении синхронизации, которая задана равной заданной частоте дифференциального вращения, которая не является нулевой частотой вращения;
при этом управление с обратной связью по частоте вращения для электромотора, которое является управлением, которое выводит крутящий момент обратной связи, чтобы приводить фактическую частоту вращения электромотора к целевой частоте вращения электромотора, соответствующей частоте вращения при определении синхронизации,
причем после выполнения управления с обратной связью по частоте вращения для электромотора, контроллер трансмиссии уменьшает эффективность управления с обратной связью по частоте вращения для начала зацепления зацепляющей муфты по сравнению с моментом до начала зацепления.
2. Устройство управления трансмиссией транспортного средства по п. 1, в котором контроллер трансмиссии уменьшает усиление обратной связи, используемое при управлении с обратной связью по частоте вращения в электромоторе, по сравнению с моментом до начала зацепления, когда начинается зацепление зацепляющей муфты.
3. Устройство управления трансмиссией транспортного средства по п. 2, в котором:
контроллер трансмиссии включает в себя секцию задания первого усиления обратной связи, которая задает усиление обратной связи, равное меньшему значению по мере того, как уменьшается абсолютное значение частоты дифференциального вращения между фактической частотой вращения электромотора для электромотора и целевой частотой вращения электромотора, соответствующей частоте вращения при определении синхронизации зацепляющей муфты, и,
когда начинается управление с обратной связью по частоте вращения для электромотора, управление с обратной связью по частоте вращения выполняется с использованием усиления обратной связи, заданного посредством секции задания первого усиления обратной связи, до определения того, что зацепление зацепляющей муфты закончено.
4. Устройство управления трансмиссией транспортного средства по п. 3, в котором:
секция задания первого усиления обратной связи задает значение усиления предельного диапазона стабильности управления с обратной связью по частоте вращения в области, в которой абсолютное значение частоты дифференциального вращения превышает заданное значение, и,
когда абсолютное значение частоты дифференциального вращения становится равным или меньше заданного значения, усиление обратной связи задается согласно характеристике, в которой значение усиления снижается вместе с уменьшением абсолютного значения частоты дифференциального вращения.
5. Устройство управления трансмиссией транспортного средства по п. 1, в котором контроллер трансмиссии прекращает управление с обратной связью по частоте вращения для электромотора, когда начинается зацепление зацепляющей муфты.
6. Устройство управления трансмиссией транспортного средства по п. 5, в котором:
контроллер трансмиссии включает в себя секцию задания второго усиления обратной связи, которая задает усиление обратной связи, равное значению усиления в предельном диапазоне стабильности управления с обратной связью по частоте вращения независимо от абсолютного значения частоты дифференциального вращения зацепляющей муфты, и
при начале управления с обратной связью по частоте вращения для электромотора, управление с обратной связью по частоте вращения выполняется с использованием усиления обратной связи, заданного посредством секции задания второго усиления обратной связи до тех пор, пока не начинается зацепление зацепляющей муфты.
7. Устройство управления трансмиссией транспортного средства по любому из пп. 1-6, в котором контроллер трансмиссии определяет зацепление зацепляющей муфты как начавшееся, когда инструкция зацепления выводится в зацепляющую муфту.
| JP 2005090604 A, 07.04.2005 | |||
| JP 2010070033 A, 02.04.2010 | |||
| JP 2012086774 A, 10.05.2012. |

