Изобретение относится к области магнетизма и автоматики и может быть использовано в качестве двигателя с автоматически регулируемым вращательным моментом
Известны двигатели постоянного тока, например, коллекторного типа, в которых регулирование вращательного момента (или угловой скорости вращения при постоянной нагрузке) осуществляется изменением питающего напряжения. К недостаткам таких двигателей следует отнести пониженную надежность из-за искрения в коллекторе и износа щеток, а также быстрые прерывания тока при переключениях секций обмоток ротора коллектором, что снижает возможность повышения угловой скорости вращения ротора из-за наличия переходных процессов. Известны бесколлекторные двигатели постоянного тока со скользящими контактами, свободные от указанных недостатков коллекторных двигателей. Особый интерес представляют двигатели с использованием постоянных тороидальных магнитов с встречным косокруговым намагничиванием, предложенные автором [1-4], в которых один из таких тороидов не вращается, а второй за счет касательных составляющих отталкивающих сил приходит во вращательное движение и передает вращение полезной нагрузке, например, генератору электрического тока. При этом создаваемый в полезной нагрузке вращательный момент (или скорость вращения этого тороида при заданной нагрузке) можно управлять изменением величины зазора между этими тороидами. При этом используется энергия магнитных полей тороидов, которая при вращении одного тороида относительно соосно установленного другого тороида практически не изменяется весьма длительное время, а при так называемом «старении» магнитных тороидов легко восполняется их намагничиванием в насыщающем магнитном поле, образующимся как суперпозиция аксиального и кругового магнитных полей [1, 2].
Ближайшим аналогом заявляемого технического решения является система автоматического регулирования генератора постоянного тока [5], содержащая источник вращения генератора постоянного тока, аккумуляторную батарею и регулятор напряжения, отличающаяся тем, что источник вращения состоит из двух соосно ориентированных одноименными магнитными полюсами магнитных тороидов с встречным косокруговым намагничиванием, один из которых закреплен с ротором генератора постоянного тока, а другой закреплен в устройстве механической его подачи к вращающемуся магнитному тороиду с регулируемым по величине магнитным зазором в функции тока подзаряда аккумуляторной батареи, а регулятор напряжения выполнен в виде тягового электромагнита с двумя соленоидальными обмотками - силовой, включенной последовательно между генератором постоянного тока и аккумуляторной батареей, и управляющей, подключенной в выходу усилителя постоянного тока, и ферромагнитного сердечника, с одной стороны механически связанного штоком с не вращающимся магнитным тороидом, установленным вместе с элементами тягового электромагнита в направляющей немагнитной трубке, а с другой - с упорной пружиной, другой конец которой связан с регулировочным винтом подстройки напряжения на выходе генератора постоянного тока при отсутствующей нагрузке, причем сигнал регулирования на входе усилителя постоянного тока формируется сравнением напряжения на аккумуляторной батарее с опорным напряжением с последующим интегрированием разностного напряжения (или его фильтрацией в инерционном RC-звене).
Такая система позволяет поддерживать постоянным напряжение с выхода генератора постоянного тока при изменяющейся электрической нагрузке при относительно небольших мощностях нагрузок, что связано с использованием электромагнитного втягивающего силового привода перемещения не вращающегося намагниченного тороида к вращающемуся с встречным косокруговым намагничиванием.
Недостатком прототипа является пониженная способность указанного втягивающего силового привода в случае применения намагниченных тороидов со сверхсильными параметрами магнитной энергии, оцениваемыми так называемой силой отрыва таких магнитов с аксиальным намагничиванием от гладкой стальной пластины, когда эти силы отрыва столь велики, что применение электромагнитного привода исключается.
Указанный недостаток известного решения устранен в заявляемом устройстве.
Целью изобретения является повышение эффективности силового втягивающего привода не вращающегося магнитного тороида к соосно установленному вращающемуся тороиду с косокруговым намагничиванием при использовании такого двигателя в широком диапазоне нагрузок с повышенным вращательным моментом, например, при применении таких двигателей в качестве двигателей автомобилей.
Указанная цель достигается в заявляемой системе управления магнито-механическим двигателем, содержащей соосно установленные не вращающийся и вращающийся тороиды с встречным косокруговым намагничиванием, силовой привод перемещения не вращающегося магнитного тороида к вращающемуся и нагрузку, связанную механически с вращающимся магнитным тороидом, а также источник электропитания, отличающейся тем, что силовой привод перемещения выполнен из измерителя скорости вращения вращающегося магнитного тороида и регулируемого датчика скорости вращения этого магнитного тороида, выходы которых подключены ко входам устройства сравнения, выход которого через последовательно включенные интегратор, усилитель постоянного тока и двигатель постоянного тока, питаемые от источника питания, подключены к понижающей механической передаче с коленчатым валом, механически связанным через шатун с шарниром со штоком перемещения не вращающегося магнитного тороида с косокруговым намагничиванием в направлении оси симметрии обоих магнитных тороидов.
Достижение цели изобретения объясняется поддержанием заданной датчиком скорости вращения вращающегося магнитного тороида независимо от величины присоединенной к нему нагрузки при значительных величинах упорной силы удержания не вращающегося магнитного тороида, для чего использована замедляющая передача от оси вращения двигателя постоянного тока и коленчатый вал, поворот которого в некотором диапазоне углов поворота, передает упорное усилие через шатун с шарниром на шток не вращающегося магнитного тороида. Чем меньше расстояние между магнитными тороидами, тем большие возникают силы удержания не вращающегося магнитного тороида.
На прилагаемом рис. 1 представлено заявляемое устройство, содержащее:
1 - вращающийся магнитный тороид с косокруговым намагничиванием,
2 - не вращающийся магнитный тороид с встречным косокруговым намагничиванием, соосно установленный с вращающимся магнитным тороидом 1,
3 - цилиндрический корпус из немагнитного материала (в области расположения магнитных тороидов 1 и 2),
4 - шток перемещения не вращающегося магнитного тороида 2 с упорной тарелкой,
5 - шатун привода перемещения с шарниром, связанный со штоком 4,
6 - коленчатый вал шатуна 5, поворачивающийся в некотором заданном диапазоне углов,
7 - механическая понижающая передача, связанная с коленвалом 6,
8 - двигатель постоянного тока, ось вращения которого связана с входом механической понижающей передачи 7,
9 - усилитель постоянного тока, связанный с источником питания и с двигателем постоянного тока 8,
10 - устройство сравнения с двумя входами, выходом подключенное к интегратору 11,
11 - интегратор астатической системы авторегулирования,
12 - измеритель скорости вращения магнитного тороида 1,
13 - датчик задания скорости вращения магнитного тороида 1, регулируемый,
14 - источник питания.
На рис. 2 показан ферромагнитный тороид 1 с косокруговым намагничиванием. Такой же тороид 2 и тороид 1 ориентированы друг к другу одноименными магнитными полюсами. Косокруговые намагничивания при этом оказываются взаимно встречными, что вызывает расталкивание тороидов друг от друга как вдоль их оси симметрии, так и по касательным к тороидам во взаимно противоположных направлениях. От действия касательных сил возникает вращательный момент, приводящий тороид 1 во вращательное движение относительно не вращающегося тороида 2.
Рассмотрим работу заявляемого технического решения.
Процесс синтеза ферромагнитных тороидов, например, неодимовых, с косокруговым намагничиванием подробно рассмотрен в работах автора [1 и 2]. При этом векторы магнитной индукции по кругу наклонены относительно плоской грани тороида под некоторым острым углом, величина которого определяется соотношением магнитных насыщающих полей от сложения аксиального и кругового магнитных полей. При этом домены ферромагнетика выстраиваются по этим полям, сохраняя свое расположение при снятии такого насыщающего магнитного поля. Если два таких тороида расположить друг к другу одноименными магнитными полюсами, то они будут испытывать силы отталкивания друг от друга как вдоль оси их симметрии, так и по кругам в разные направления. Чем ближе располагаются магнитные полюсы этих тороидов, тем эти силы растут как они растут и при увеличении объема тороидов. Аксиальные и касательные силы соотносятся друг по отношению к другу в зависимости от угла ϕ наклона векторов магнитной индукции относительно плоскости граней тороидов, как это показано на рис. 2.
Для постоянных магнитов введена характеристика - сила отрыва FO магнита от плоской и гладкой стальной плиты. В Интернете имеется калькулятор для расчета силы отрыва при различных конструктивных параметрах магнита. Для магнитов-тороидов такими параметрами являются материал ферромагнетика, внешний DMAX и внутренний DMIN диаметры и толщина Н магнитного тороида. Для силы отрыва действуют следующие соотношения:

где FA и FK - соответственно аксиальная и касательная силы. Вращательный момент М, приводящий тороид 2 во вращение, вычисляется по формуле:

где h - зазор между обращенными друг к другу магнитными полюсами тороидов 1 и 2. Как известно, сила отталкивания магнитов с аксиальным намагничиванием убывает при росте зазора h пропорционально четвертой степени расстояния между центрами одинаковых по параметрам Н, DMAX и DMIN магнитов.
Сила упора FX магнитного тороида 2, действующая через шток 4 на коленчатый вал 6 через шатун с шарниром 5, вычисляется по формуле:

и величина этой силы упора для двигателей большой мощности оказывается столь большой, что необходимо применять специальные конструкции подачи и удержания в устройствах перемещения магнитного тороида 2 вдоль оси симметрии относительно магнитного тороида 1 с его осью вращения, связанной с присоединенной нагрузкой. В данном устройстве используется коленчатый вал 6, поворачиваемый в ту или другую сторону в некотором диапазоне углов для перемещения магнитного тороида 2 в некотором диапазоне зазоров h (где hMIN ≤ h ≤ hMAX) с помощью двигателя постоянного тока 8 через понижающую механическую передачу 7. Последняя содержит червячную, кроме шестеренчатых, передачу для того, чтобы давление магнитного тороида 2 на коленчатый вал не позволяло вращать вал двигателя постоянного тока 8, когда он обесточен системой авторегулирования. Эта передача повышает вращательный момент на коленчатом валу 6 в k >> 1 раз по сравнению с вращательным моментом на валу двигателя 8, где k - понижающее передаточное отношение в модуле 7.
Задание скорости вращения магнитного тороида 1 осуществляется оператором (водителем автомашины) с помощью датчика 13, сигнал которого в форме некоторой величины постоянного напряжения поступает на один из входов устройства сравнения 10, на другой вход которого действует также постоянное напряжение с выхода измерителя 12 скорости вращения магнитного тороида 1, то есть выходного вала устройства, связанного с присоединенной нагрузкой. Диапазоны изменений постоянных напряжений с выходов модулей 12 и 13 сопоставимы, например, в диапазоне 0…10 Вольт. Поэтому на выходе устройства сравнения 10 вырабатывается управляющее напряжение, равное разности указанных напряжений от модулей 12 и 13 - как положительной, так и отрицательной полярности, то есть в пределах: -10 В ≤ UУПР ≤ +10 В. Управляющее напряжение UУПР подается на вход интегратора 11, выполненный на операционном усилителе по известной схеме, а далее на вход усилителя постоянного тока 9, от которого питается двигатель постоянного тока 8, который может вращаться как в одну, так и в другую сторону в зависимости от полярности подаваемого на него напряжения, а также создавать требуемые вращательные моменты от вариации величины питающего напряжения с выхода усилителя постоянного тока. Перемещение магнитного тороида 2 происходит в том или ином направлении вдоль оси симметрии до тех пор, пока на выходе интегратора, а, следовательно, и на выходе усилителя постоянного тока 9 напряжение не станет нулевым. Это будет в том случае, когда заданная оператором скорость вращения магнитного тороида 1 с помощью датчика 13 не станет отвечать действительной скорости вращения выходного вала рассматриваемого двигателя, регистрируемой измерителем 12.
Изменение присоединенной нагрузки на ось вращения магнитного тороида 1, которое приводит к снижению скорости его вращение, с помощью системы авторегулирования вызывает появление управляющего сигнала той или иной полярности, что вызывает изменение питающего двигатель 8 напряжения, и происходит соответствующее перемещение магнитного тороида 2 (изменение зазора h) для соответствующего изменения скорости вращения оси вращения магнитного тороида 1, и заданная датчиком 13 скорость вращения достигается автоматически. Так работает «круиз контроль» в престижных автомобилях.
Рассмотрим пример реализации заявляемого устройства.
Пусть используем в качестве магнитных тороидов 1 и 2 неодимовые магниты марки N50 с диаметрами DMAX=400 мм и DMIN=200 мм и толщиной Н=20 мм по данным калькулятора имеем при этом силу отрыва FO=274,8 кГ. Согласно выражению (2), при угле наклона ϕ=30° и при. скорости вращения f магнитного тороида 1, равной 50 об/сек (3000 об/мин) механическая мощность на валу двигателя при разных зазорах h в диапазоне 2 мм ≤ h ≤ 30 мм, то есть мощность двигателя Р=2 π f М изменяется в пределах, указанных в нижеследующей таблице.
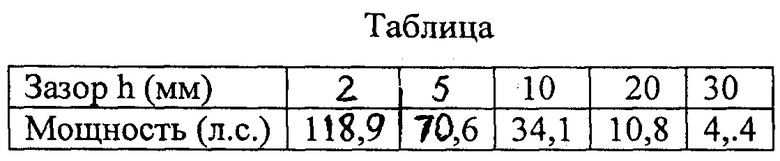
Такой двигатель вполне можно использовать в бюджетном автомобиле с автоматической коробкой передачи и с вариатором. Возможно построение значительно более мощных двигателей при соответствующем выборе параметров магнитных тороидов 1 и 2, а также при изменении конструкции двигателя. Например, при объединении нескольких пар магнитных тороидов 1 и 2 на одной выходной оси.
Для рассмотренного выше примера двигателя максимальная сила упора на шток 4 при h=2 мм составляет согласно (3) величину FX=94 кГ. Ясно, что оператор не смог бы сам удерживать такую силу, например, давить на педаль газа в автомобиле с такой силой. Поэтому и нужна система автоматического управления таким двигателем.
Литература
1. Меньщих О.Ф., Способ косокругового намагничивания ферромагнитного тороида, Патент РФ №2391730, Опубл. в бюл. №16 от 10.06.2010.
2. Меньших О.Ф., Способ косокругового намагничивания ферромагнитного тороида, Патент РФ №2392681, Опубл. в бюл. №17 от 20.06.2010.
3. Меньших О.Ф., Прибор для измерения силового взаимодействия ферромагнитных тороидов с косокруговым намагничиванием, Патент РФ №2405164, Опубл. в бюл. №33 от 27.11.2010.
4. Меньших О.Ф., Двигатель постоянного тока со скользящими контактами, Патент РФ №2611566, Опубл. в №7 от 28.02.2017.
5. Меньших О.Ф., Система автоматического регулирования генератора постоянного тока, Патент РФ №2676662, Опубл. в бюл. №1 от 10.01.2019 (прототип).

Изобретение относится к области электротехники и автоматики и может быть использовано в качестве двигателя с автоматически регулируемым вращательным моментом. Технический результат - повышение эффективности силового втягивающего привода не вращающегося магнитного тороида к соосно установленному вращающемуся тороиду с косокруговым намагничиванием при использовании такого двигателя в широком диапазоне нагрузок с повышенным вращательным моментом. Система управления магнито-механическим двигателем содержит соосно установленные не вращающийся и вращающийся тороиды с встречным косокруговым намагничиванием, силовой привод перемещения не вращающегося магнитного тороида к вращающемуся и нагрузку, связанную механически с вращающимся магнитным тороидом, а также источник электропитания. Силовой привод перемещения выполнен из измерителя скорости вращения вращающегося магнитного тороида и регулируемого датчика скорости вращения этого магнитного тороида, выходы которых подключены ко входам устройства сравнения, выход которого через последовательно включенные интегратор, усилитель постоянного тока и двигатель постоянного тока, питаемые от источника питания, подключены к понижающей механической передаче с коленчатым валом, механически связанным через шатун с шарниром со штоком перемещения не вращающегося магнитного тороида с косокруговым намагничиванием в направлении оси симметрии обоих магнитных тороидов. Устройство может быть с успехом применено в автомобилях, не требующих заправки дорогостоящим топливом или подзарядки на электростанциях аккумуляторных батарей электромобилей. Такие автомобили являются экологически чистыми. Самостоятельное значение имеет данное устройство как источник механической или электрической энергии широкого применения - от бытового до промышленного. 2 ил.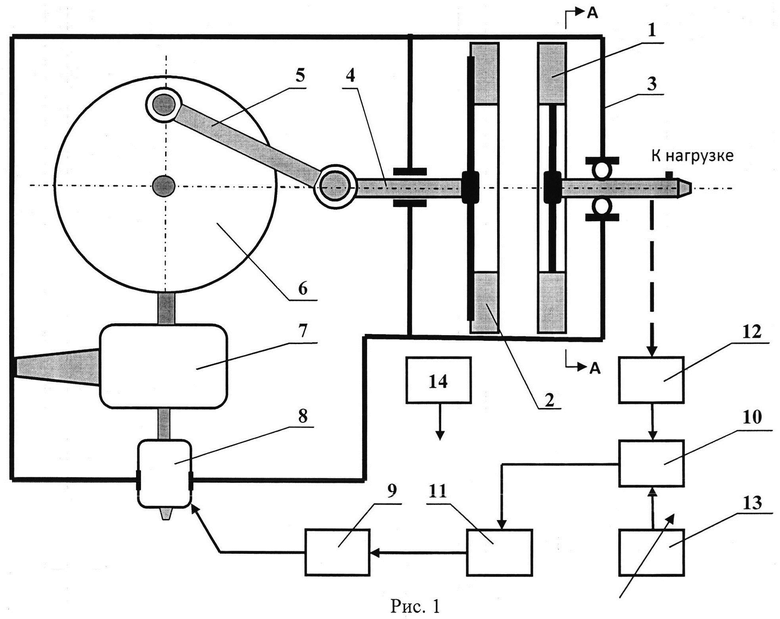
Система управления магнито-механическим двигателем, содержащая соосно установленные не вращающийся и вращающийся тороиды с встречным косокруговым намагничиванием, силовой привод перемещения не вращающегося магнитного тороида к вращающемуся и нагрузку, связанную механически с вращающимся магнитным тороидом, а также источник электропитания, отличающаяся тем, что силовой привод перемещения выполнен из измерителя скорости вращения вращающегося магнитного тороида и регулируемого датчика скорости вращения этого магнитного тороида, выходы которых подключены ко входам устройства сравнения, выход которого через последовательно включенные интегратор, усилитель постоянного тока и двигатель постоянного тока, питаемые от источника питания, подключены к понижающей механической передаче с коленчатым валом, механически связанным через шатун с шарниром со штоком перемещения не вращающегося магнитного тороида с косокруговым намагничиванием в направлении оси симметрии обоих магнитных тороидов.
| Система автоматического регулирования генератора постоянного тока | 2017 |
|
RU2676662C1 |
| СИСТЕМА ПРИВОДА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2629815C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДСИСТЕМ КОМПРЕССИОННОГО БЫТОВОГО ХОЛОДИЛЬНОГО ПРИБОРА | 2013 |
|
RU2526143C1 |
| DE 30333541 A1, 22.04.1982 | |||
| US 2013062891 A1, 14.03.2013 | |||
| УСТРОЙСТВО ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И(ИЛИ) ОРИЕНТАЦИИ ОБЪЕКТОВ И СООТВЕТСТВУЮЩИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ | 2007 |
|
RU2428709C2 |
| WO 2014086383 A1, 12.06.2014 . | |||

