Изобретение относится к области преобразовательной техники, в частности к бортовым системам электроснабжения (СЭС) космических аппаратов (КА) и может быть использовано при проектировании и создании систем электроснабжения автоматических космических аппаратов на основе солнечных и аккумуляторных батарей (СБ и АБ).
Техническим результатом изобретения является повышение удельной энергетической эффективности системы электроснабжения (Вт/кг) за счет реализации однократного преобразования энергии СБ для силового электропитания бортовых потребителей с другими требуемыми значениями напряжения питания, отличающимися от напряжения основной выходной стабилизированной шины питания нагрузки.
Широко известна параллельно-последовательная структура системы электропитания (СЭП) [1] с экстремальным регулированием мощности (ЭРМ) фотоэлектрической батареи, содержащая фотоэлектрическую и аккумуляторную батареи, последовательный регулятор напряжения (РН) для питания нагрузки от фотоэлектрической батареи, зарядное и разрядное устройства (ЗУ и РУ). Экстремальное регулирование мощности фотоэлектрической батареи осуществляется ЗУ при питании нагрузки и одновременном заряде АБ, а так же регулятором напряжения при одновременном питании нагрузки от СБ и АБ. Система электропитания с ЭРМ фотоэлектрической батареи предназначена для формирования силовой низковольтной (27-28 В) шины питания нагрузки.
Недостатком этой системы электропитания является то, что рабочее напряжение солнечной батареи всегда должно быть больше напряжения шины питания нагрузки. При создании высоковольтных СЭП КА (100 В) максимальное значение напряжения холостого хода «холодных» кремниевых СБ в моменты выхода КА из теневых участков Земли может достигать 300 В, а у СБ, выполненных на основе арсенид-галлиевых трехкаскадных фотопреобразователей превышать 220 В, что является недопустимым из-за возможности возникновения в условиях вакуума электростатических разрядов между цепочками фотодиодов СБ или элементами токосъема. Для ограничения напряжения на СБ требуется применение специальных устройств или реализация режимов работы СЭП, ограничивающих повышение напряжения на охлажденной СБ более 180 В.
В настоящее время проектирование мощных высоковольтных российских и иностранных СЭП автоматических КА, работающих на геостационарной орбите, осуществляется на основе арсенид-галлиевых трехкаскадных фотопреобразователей и шунтовых регуляторов напряжения СБ [2], ограничивающих напряжение на СБ на уровне напряжения шины питания нагрузки (100 В), и поэтому не позволяющих реализовывать режим ЭРМ СБ. Солнечная батарея в течение всего времени активного функционирования значительно недоиспользуется по энергии, так как оптимальные значения напряжений, при которых СБ генерирует максимум мощности значительно превышают стабилизируемое напряжение 100 В.
Общим недостатком обеих структур является то, что при создании систем электроснабжения автоматических космических аппаратов на их основе электропитание бортовых потребителей, таких как электрореактивные двигательные установки (ЭРДУ) с значительно отличающимися уровнями требуемого напряжения питания, осуществляется от дополнительных преобразующих устройств, подключаемых к выходной стабилизированной шине СЭП [3]. Следовательно при электропитании таких бортовых потребителей осуществляется двойное преобразование энергии, генерируемой солнечной батареей, сначала преобразователем СЭП, регулирующим напряжение СБ, а затем преобразователем бортовых потребителей, подключенным к выходной стабилизированной шине СЭП.
Предлагаемый в [3] способ формирования системы электроснабжения ЭРДУ параллельно с традиционной СЭП, при одновременном использовании СБ как в СЭП КА так и в СЭС ЭРДУ, практического применения не нашел, так как значительно усложняется система управления общей СЭС, увеличивается количество датчиков и регуляторов.
Названные проблемы неэффективного использования энергии могут быть решены путем использования инверторно-трансформаторных схем преобразования энергии, позволяющих создавать универсальные многовыходовые инверторно-трансформаторные преобразователи для электропитания бортовых потребителей с различными требуемыми уровнями напряжения питания и с однократным преобразованием энергии СБ.
Наиболее близкой по технической сущности к заявленному изобретению является система электропитания космического аппарата, описанная в патенте [4] (фиг. 1).
Система электропитания состоит из солнечной батареи 1, датчика тока 2, системы управления 3 с экстремальным шаговым регулятором мощности СБ, регулятора напряжения 4, выполненного в виде мостового инвертора с входным С-фильтром, трансформатора 6 с первичной обмоткой 5 и вторичной обмоткой 7, выпрямителя 8 с выходным LC-фильтром, устройства контроля степени заряженности (УКЗБ) АБ 9, зарядного устройства 10, аккумуляторной батареи 11, разрядного устройства 12 и нагрузки 13.
Система электропитания (фиг. 1) обеспечивает повышение энергетической эффективности СЭП КА за счет реализации экстремального регулирования мощности СБ как в режиме заряда АБ, так и в режиме разряда АБ (при одновременном питании нагрузки от СБ и АБ), а также обеспечивает возможность использования солнечной батареи с рабочим напряжением как выше, так и ниже напряжения на аккумуляторной батареи и на нагрузке, и тем самым позволяет исключить возможность повышения напряжения холостого хода охлажденной СБ в моменты выхода КА из тени Земли более 180 вольт. Это является основным достоинством рассмотренной структуры.
Недостатком структуры является то, что при необходимости электропитания бортовых потребителей, таких как электрореактивные двигательные установки, требуется разработка дополнительных преобразующих устройств, подключаемых к выходной стабилизированной шине СЭП, обеспечивающих на выходе набор значительно отличающихся напряжений электропитания, основным из которых является мощный высоковольтный источник питания анода стационарных плазменных двигателей (СПД). Следовательно при электропитании таких бортовых потребителей осуществляется двойное преобразование энергии генерируемой солнечной батареей, сначала преобразователем СЭП, регулирующим напряжение СБ (устройство 4 на фиг. 1), а затем дополнительным преобразователем (СПУ), подключенным к выходной стабилизированной шине СЭП параллельно нагрузке 13 [3].
Удельная энергетическая эффективность (Вт/кг) сформированной системы электроснабжения путем добавления новых требований к СЭП, традиционно представляющей собой комплекс, состоящий из СБ, АБ и энергопреобразующей аппаратуры (зарядные устройства, разрядные устройства и регуляторы напряжения СБ) с выходной стабилизированной шиной питания нагрузки не может быть высокой, так как выходная мощность дополнительных преобразователей энергии может превышать 30% от максимальной выходной мощности энергопреобразующих устройств СЭП. Суммарный коэффициент преобразования энергии СБ также низкий. Перед разработчиками бортовой аппаратуры автоматических космических аппаратов стоит задача разработки универсальных преобразующих устройств, обеспечивающих возможность одновременного электропитания различных бортовых потребителей с целью значительного уменьшения их массы и габаритов.
Целью изобретения является повышение удельной энергетической эффективности СЭС КА (Вт/кг) за счет реализации однократного преобразования энергии СБ для силового электропитания бортовых потребителей инверторно-трансформаторным преобразователем энергии СБ традиционной СЭП. При этом достигается, как повышение КПД передачи энергии от СБ к СПД, так и значительное уменьшение массы дополнительных преобразователей энергии.
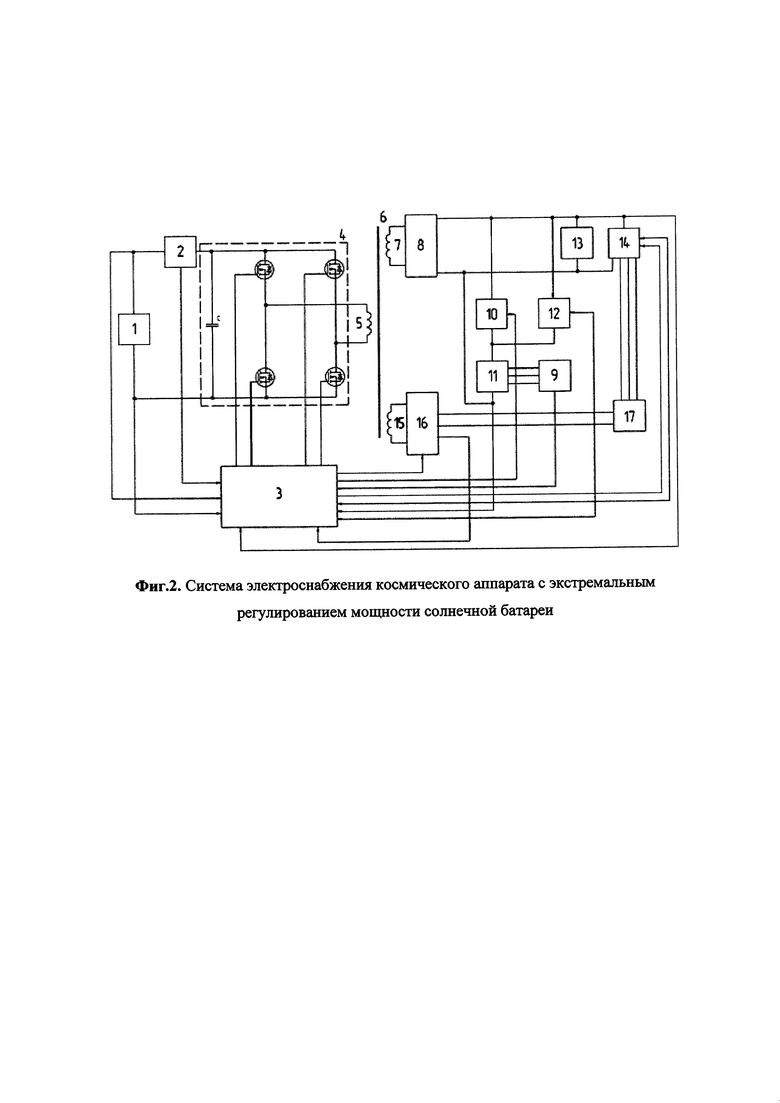
На Фиг. 2 представлена функциональная схема заявляемой системы электроснабжения космического аппарата с экстремальным регулированием мощности солнечной батареи инверторно-трансформаторным преобразователем, которая содержит солнечную батарею 1, датчик тока 2, цифровую систему управления 3 с экстремальным регулятором мощности СБ, регулятор напряжения 4, выполненный в виде мостового инвертора с входным С-фильтром, трансформатор 6 с первичной обмоткой 5 и вторичными обмотками 7 и 15, выпрямитель 8 с выходным LC-фильтром и выпрямитель 16 с выходным LC-фильтром и емкостным накопителем энергии и устройством коммутации анодного питания СПД, устройство контроля степени заряженности (УКЗБ) АБ 9, зарядное устройство 10, аккумуляторную батарею 11, разрядное устройство 12, нагрузку 13, систему питания и управления СПУ 14 и СПД 17.
Солнечная батарея 1 подключена плюсовой и минусовой шинами к регулятору напряжения 4, причем в плюсовой шине установлен датчик тока 2. Выход регулятора напряжения 4 соединен с первичной обмоткой 5 трансформатора 6. При этом цифровая система управления 3 соединена своими измерительными входами с выходом датчика тока 2 и с силовыми шинами СБ 1, нагрузки 13 и СПУ 14, информационными входами с выходами с информационными выходами СПУ 14 и УКЗБ 9, а своими управляющими выходами с транзисторами инвертора регулятора напряжения 4, с управляющими входами выпрямителя 16, зарядного устройства 10, разрядного устройства 12 и СПУ 14.
Входы выпрямителя 8 соединены с вторичной обмоткой 7, а выходы с нагрузкой 13 и СПУ 14. Входы выпрямителя 16 соединены с вторичной обмоткой 15 трансформатора 6, а выходы с СПД 17. Вход зарядного устройства 10 и выход разрядного устройства 12 соединены с одним из выходов выпрямителя 8. Аккумуляторная батарея 11 одной из своих силовых клемм соединена с выходом зарядного устройства 10 и входом разрядного устройства 12, а второй силовой клеммой соединена с вторым выходом выпрямителя 8 образуя общую шину питания нагрузки 13 и СПУ 14.
Измерительные выходы аккумуляторной батареи 11 соединены с измерительными входами устройства контроля степени заряженности АБ 9. СПУ 14 своими маломощными низковольтными (стабилизатор накала катода, источник поджига, источник питания термодросселя) выходами соединена с СПД 17.
Сигналы с датчика тока 2 и с силовых шин СБ 1 предназначены для вычисления мощности генерируемой СБ 1. Управление транзисторами инвертора регулятора напряжения 4, зарядным 10 и разрядным 12 устройствами производится цифровой системой управления 3 по заданному алгоритму в соответствии с зонным принципом регулирования напряжений СБ 1 и нагрузки 13, а управление выпрямителем 16 и СПУ 14 в соответствии с временной диаграммой запуска и работы СПД.
Система электропитания КА работает в следующих режимах.
1. Мощность нагрузки по двум силовым выходам меньше мощности генерируемой СБ (РH<РСБmax), АБ заряжена
При заряженной АБ 11 зарядное устройство 10 отключено. Инвертор 4 стабилизирует напряжение на обмотке 5 трансформатора 6, соответствующее напряжению на нагрузке 13 по сигналам цифровой системы управления 3 в своем верхнем поддиапазоне, которая использует напряжение обратной связи (напряжение шины питания нагрузки).
При необходимости включения в работу ЭРДУ, по сигналам с цифровой системы управления 3 в выпрямителе 16 коммутируется напряжение анодного питания на СПД 17 и включается СПУ 14. Управляющие напряжения (стабилизатора накала катода, источника поджига и источника питания термодросселя) с СПУ 14, а также силовое анодное питание с выпрямителя 15 на СПД 17 подаются в соответствии с требуемым алгоритмом работы СПД [3].
2. Мощность нагрузки по двум силовым выходам меньше мощности генерируемой СБ (РH<РCБmах), АБ разряжена
При получении сигнала с УКЗБ 9 о необходимости заряда аккумуляторной батареи 11 включается ЗУ 10 по сигналу с цифровой системы управления 3, которое начинает открываться и направлять ток в АБ 11. Если суммарное значение мощности заряда АБ 11 (ЗУ 10 работает в режиме токоограничения) и мощности нагрузки 13 меньше максимального значения мощности генерируемой СБ 1, то режим работы соответствует режиму 1, описанному выше. В этом случае мощность заряда АБ 11 является дополнительной нагрузкой, не изменяющей режим функционирования СЭС.
В случае, если суммарное значение мощности заряда АБ 11 и мощности нагрузки 13 больше максимального значения мощности генерируемой СБ 1, то напряжение на шине питания нагрузки 13 понижается до поддиапазона регулирования зарядного устройства 10, которое начинает ограничивать ток заряда АБ 11, стабилизируя тем самым выходное напряжение СЭС.
Как только напряжение на шине питания нагрузки 13 становиться ниже поддиапазона регулирования инвертора 4 цифровая система управления 3 переводит инвертор 4 в режим регулирования напряжения СБ 1 по сигналам управления от экстремального регулятора мощности СБ, входящего в состав цифровой системы управления 3. ЭРМ перемножая сигналы датчика тока 2 и напряжения от СБ 1 вычисляет текущее значение мощности, генерируемое солнечной батареей 1, и, изменяя значение напряжения СБ 1 в диапазоне поиска экстремума, находит оптимальное значение напряжения СБ 1.
Таким образом инвертор 4 обеспечивает отбор от СБ 1 максимум мощности, а ЗУ 10 стабилизирует выходное напряжение отправляя весь излишек мощности СБ 1 на заряд АБ 11.
3. Мощность нагрузки по двум силовым выходам больше мощности генерируемой СБ (РH<РCБmах), разряд АБ. Питание нагрузки от СБ и АБ.
3.1 Мощность нагрузки по силовому выходу анодного питания СПД меньше мощности генерируемой СБ.
При увеличении мощности нагрузки до значения большего, чем может генерировать СБ 1 в режиме экстремального регулирования мощности (РH<РCБ ЭРМ) заряд АБ 11 прекращается, ЗУ 10 закрывается. Напряжение на шине питания нагрузки 13 понижается до поддиапазона регулирования разрядного устройства (РУ) 12, которое начинает регулировать выходное напряжение на основной выходной шине (100 В) в своем (нижнем) поддиапазоне, восполняя весь недостаток мощности в нагрузке 13.
Режим работы инвертора 4 не изменяется, он по-прежнему регулирует напряжение СБ 1 в области экстремума мощности по сигналам ЭРМ и обеспечивает анодное электропитание СПД через обмотку 15 трансформатора 6 и выпрямитель 16.
При уменьшении мощности нагрузки до значений меньших, чем генерирует СБ 1 в режиме ЭРМ (РH<РCБ ЭРМ) разряд АБ 11 прекращается, напряжение на шинах питания нагрузок повышается до поддиапазона регулирования зарядного устройства 10, которое вновь начнет регулировать выходное напряжение отправляя весь излишек мощности СБ 1 на заряд АБ 11.
3.2 Мощность нагрузки по силовому выходу анодного питания СПД больше мощности генерируемой СБ.
По сигналам с цифровой системы управления ЭРДУ выключается, СПУ 14, коммутатор выпрямителя 16 снимает напряжение с анода СПД 17.
4. Солнечная батарея не генерирует мощность (РСБ=0), разряд АБ. СПУ 14 и СПД 17 не работают, выпрямитель 16 с емкостным накопителем энергии от СПД 17 отключен.
При попадании КА в тень Земли или отворотах панелей СБ 1 от Солнца солнечная батарея 1 не генерирует мощность (РСБ=0). Напряжение на шине питания нагрузки 13 понижается до поддиапазона регулирования разрядного устройства 12, которое начинает регулировать выходное напряжение в своем (нижнем) поддиапазоне, восполняя весь недостаток мощности в нагрузке 13. Инвертор 4 находится в ждущем режиме.
Таким образом, при использовании предлагаемой СЭС достигается повышение удельной энергетической эффективности (Вт/кг) за счет реализации однократного преобразования энергии СБ для силового электропитания бортовых потребителей с другими требуемыми значениями напряжения питания, отличающимися от напряжения выходной стабилизированной шины питания нагрузки (питания анода СПД).
Например, при использовании предложенной СЭС для электропитания ЭРДУ, повышается КПД передачи энергии от СБ для силового анодного питания СПД и значительно уменьшается масса СПУ, так как функцию анодного питания выполняет инвертор регулятора напряжения СБ. Масса регулятора напряжения СБ изменяется незначительно, так как добавляется только выпрямитель анодного питания 15. Расчетные мощности инвертора 4 и трансформатора 6 не изменяются.
Использованные источники
1. Пат. РФ №2101831, H02J 7/35. Система электропитания с экстремальным регулированием мощности фотоэлектрической батареи. / К.Г. Гордеев, С.П. Черданцев, Ю.А. Шиняков. Заявка №95119971 от 27.11.1995. Опубл. 10.01.1998, Бюл. №1.
2. Системы электропитания для больших платформ на геостационарной орбите / В.В. Хартов, Г.Д. Эвенов, B.C. Кудряшов, М.В. Лукьяненко // Электронные и электромеханические системы и устройства: Сб. науч. тр. - Новосибирск: Наука, 2007. - С. 7-16.
3. Системы электропитания и управления электрореактивными двигательными установками автоматических космических аппаратов / К.Г. Гордеев, А.А. Остапущенко, В.Н. Галайко, М.П. Волков // Известия Томского политехнического университета. 2009. Т. 315. №4. С. 131-136.
4. Пат. РФ №2574565, H02J 7/00. Система электропитания космического аппарата с регулированием мощности солнечной батареи инверторно-трансформаторным преобразователем. / Ю.А. Шиняков, А.В. Осипов, С.Б. Сунцов, В.Н. Школьный, М.М. Черная. Заявка: 2014135535 от 01.09.2014. Опубл. 10.02.2016. Бюл. №4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С РЕГУЛИРОВАНИЕМ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ ИНВЕРТОРНО-ТРАНСФОРМАТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2014 |
|
RU2574565C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2613660C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С ЭКСТРЕМАЛЬНЫМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2560720C1 |
| Система электропитания космического аппарата | 2018 |
|
RU2680245C1 |
| ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2634513C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2653704C2 |
| ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2650100C1 |
| ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С ИНДУКТИВНО-ЕМКОСТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2016 |
|
RU2634612C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2724111C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |

Система электроснабжения космического аппарата содержит солнечную батарею (СБ), датчик тока, цифровую систему управления с экстремальным регулятором мощности СБ, регулятор напряжения, выполненный в виде мостового инвертора с входным С-фильтром, трансформатор с первичной и вторичными обмотками, два выпрямителя, устройство контроля степени заряженности, зарядное устройство, аккумуляторную батарею, разрядное устройство, нагрузку, систему питания и управления, стационарный плазменный двигатель. Обеспечивается повышение удельной энергетической эффективности, повышение КПД передачи энергии, уменьшение массы дополнительных преобразователей энергии. 2 ил.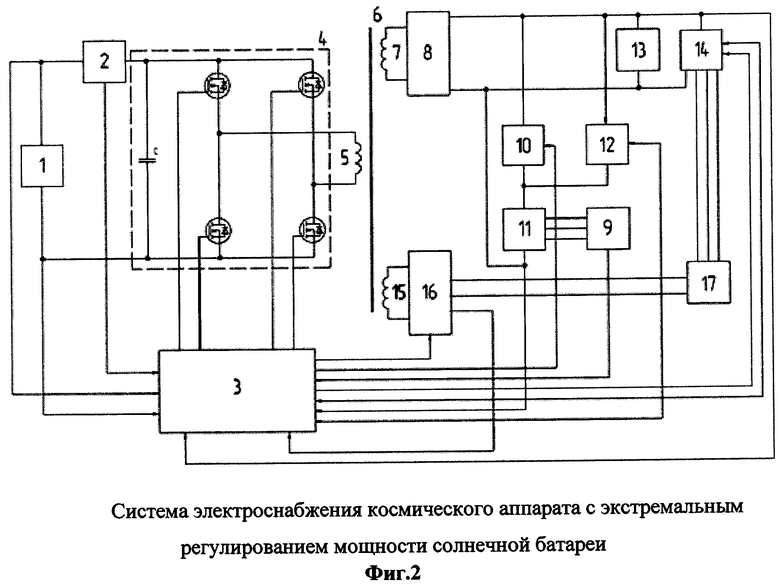
Система электроснабжения космического аппарата, состоящая из солнечной батареи, подключенной своими плюсовой и минусовой шинами к регулятору напряжения, причем в плюсовой шине установлен датчик тока, трансформатора, первичная обмотка которого соединена с регулятором напряжения, построенным по мостовой схеме инвертора, а вторичная обмотка соединена с входами выпрямителя, содержащего выходной LC-фильтр, один из выходов которого соединен с входом зарядного устройства, выходом разрядного устройства и входом нагрузки, выход зарядного устройства соединен с входом разрядного устройства и одной из силовых клемм аккумуляторной батареи, измерительные выходы которой соединены с измерительными входами устройства контроля степени заряженности, второй силовой выход выпрямителя соединен с другой силовой клеммой аккумуляторной батареи и вторым входом нагрузки, системы управления с экстремальным регулятором мощности солнечной батареи, соединенной измерительным входом с выходом датчика тока, а также другими измерительными входами с силовыми шинами солнечной батареи и нагрузки, управляющей транзисторами регулятора напряжения с входным С-фильтром, отличающаяся тем, что вторая выходная обмотка трансформатора соединена с входами второго силового выпрямителя с емкостным накопителем энергии и коммутатором, силовые выходы которого соединены с силовыми входами анодного питания стационарного плазменного двигателя, а управляющий вход подключен к управляющему выходу цифровой системы управления, информационные входы которой соединены с выходом силового выпрямителя с емкостным накопителем энергии и коммутатором, с выходом устройства контроля степени заряженности и выходом системы питания и управления стационарным плазменным двигателем, другие управляющие выходы цифровой системы управления соединены с входами зарядного устройства, разрядного устройства и системы питания и управления стационарным плазменным двигателем, подключенным своими силовыми входами к силовым выходам первого выпрямителя, а n выходами к n входам электропитания стационарного плазменного двигателя.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| Устройство для навивания проволоки на штыри (колки) | 1957 |
|
SU117194A1 |
| ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2650100C1 |
| JP 7015890 A, 17.01.1995 | |||
| JP 6070485 A, 11.03.1994. | |||

