Изобретение относится к ветроэнергетике и предназначено для преобразования кинетической энергии ветра в механическую энергию вращения лопастной системы с последующим ее преобразованием в электрическую энергию.
Из уровня техники известна «Ветроэлектростанция» по патенту РФ на полезную модель №184844 (МПК F03D 9/34, F03D 3/06, F03D 3/04, опубликован 12.11.2018), которая включает опорную раму, выполненную с возможностью ее крепления между, как минимум, тремя радиально расположенными сооружениями, на которой расположен вал, выполненный с возможностью вращения вокруг вертикальной оси и лопастную систему, закрепленную на валу, а также щиты, закрепленные по периметру рамы и создающие направленный воздушный поток.
В известной ветроэлектростанции лопасти лопастной системы закреплены на валу без возможности изменения их положения. Данное расположение может приводить к тому, что лопасти, двигающиеся в процессе вращения вала навстречу воздушному потоку, поступающему между сооружениями к лопастной системе, могут создавать аэродинамическое сопротивление, приводящее к снижению эффективности работы ветроэлектростанции.
Из уровня техники известен «Способ управления лопастями ротора ветряка с вертикальной осью вращения» по патенту РФ на изобретение №2525998 (МПК F03D 7/06, опубликован 20.08.2014), выбранный в качестве ближайшего аналога. Согласно известному способу лопасти ротора ветроэлектростанции, создающие под действием ветрового напора крутящий момент относительно вертикальной оси ротора, располагают таким образом, что с разных сторон ротора они создают максимальное и минимальное аэродинамическое сопротивление, при этом указанное положение лопастей обеспечивают путем фиксирования пространственного положения лопасти в момент начала создания данной лопастью крутящего момента относительно вертикальной оси ротора, а при прекращении создания данной лопастью крутящего момента относительно вертикальной оси ротора фиксацию пространственного положения лопасти снимают и переводят данную лопасть в состояние флюгирования.
В известном решении для достижения максимального и минимального аэродинамического сопротивления лопастей используют фиксирование их пространственного положения либо перевод в состояние флюгирования соответственно, при этом определяют направление ветра, с помощью датчика направления ветра и датчиков положения ротора. Каждый раз, даже при малейшем изменении ветра, необходимо изменять положение лопастей, а при сверхнормативных по скорости ветрах ротор вообще выводят из рабочего режима путем перевода всех лопастей во флюгирующее состояние. Следовательно, недостатками известного способа являются сложность его реализации, недостаточная надежность конструкции, используемой для реализации способа, и ограниченная функциональность, в частности, невозможность использования при низких или наоборот высоких скоростях ветра.
Задачей заявляемого изобретения является создание способа управления положением лопастей лопастной системы ветроэлектростанции, который позволил бы преодолеть указанные недостатки известных решений. Технический результат заключается в повышении эффективности и стабильности работы ветроэлектростанции, надежности конструкции, в расширении функциональных возможностей, заключающемся в возможности использования ветроэлектростанции при широком диапазоне силы и направленности ветра без необходимости постоянной подстройки.
Заявленный технический результат достигается тем, что в заявляемом техническом решении при вращении вала изменяют положение лопастей лопастной системы ветроэлектростанции таким образом, что в момент начала создания данной лопастью крутящего момента относительно вертикальной оси ротора она занимают положение перпендикулярно направлению рабочего воздушного потока, поступающего на лопастную систему, то есть создает ему максимальное аэродинамическое сопротивление, а при перемещении лопасти на другую сторону относительно вертикальной оси ротора, изменяют её положение на параллельное, при котором аэродинамическое сопротивление минимально, а, следовательно, не оказывающее сопротивление вращению всей лопастной системы. Под рабочим воздушным потоком следует понимать поток воздуха поступающий на лопастную систему через систему управления воздушным потоком. Данная система позволяет обеспечить постоянное направление рабочего воздушного потока и может представлять собой систему щитов, положение которых устанавливает устройство управления, подключенное к датчику ветра. В зависимости от направления и силы ветра устройство управления может выбирать степень раскрытия щитов и их расположение, при котором рабочий воздушный поток, поступающий на лопастную систему, будет оптимальным для достижения требуемой скорости вращения вала. Систему управления для выполнения указанных функций снабжают приводными механизмами щитов. Лопасти могут быть выполнены с возможностью вращения относительно как горизонтальной, так и вертикальной оси вращения, а также с возможностью изменения их формы. Для изменения положения лопастей систему снабжают устройством разворота лопастей, которое может содержать, в частности, приводные механизмы поворота лопастей.
Использование системы управления воздушным потоком, в частности, в виде щитов для регулирования рабочего воздушного потока позволяет получать постоянный по силе и направлению воздушный поток, поступающий на лопастную систему, независимо от фактической скорости и направления ветра. Это обеспечивает стабильную работу ветроэлектростанции и высокую эффективность. При такой конструкции управление положением лопастей значительно упрощается, так как нет необходимости постоянно пересчитывать и корректировать положение лопастей, в зависимости от направления ветра и его силы. Лопасти, выполненные с возможностью изменять их форму, например, изгибаться вдоль и/или поперек оси их вращения, способны принимать оптимальную форму для максимальной передачи вращающего момента на вал ветроэлектростанции. При этом, так как направление рабочего потока заранее установлено, не требуется постоянного перерасчета и подстройки формы и момента изменения формы лопастей.
Систему управления воздушным потоком, включающую щиты и устройство управления, выполняют таким образом, что выбирают несколько, преимущественно четыре, направлений рабочего воздушного потока и, в зависимости от направления ветра, располагают щиты таким образом, что рабочий поток поступает по одному из этих, заранее предопределенных, направлений. Для каждого из этих предустановленных направлений рабочего потока рассчитаны и заданы оптимальные углы положения лопастей, которые уже не требуют дальнейшей корректировки в случае изменения направления ветра, так как рабочий воздушный поток сохраняет стабильное направление, благодаря щитам, которые его регулируют.
Суть заявляемого решения поясняется далее с помощью фигур, на которых условно представлено осуществление заявленного решения.
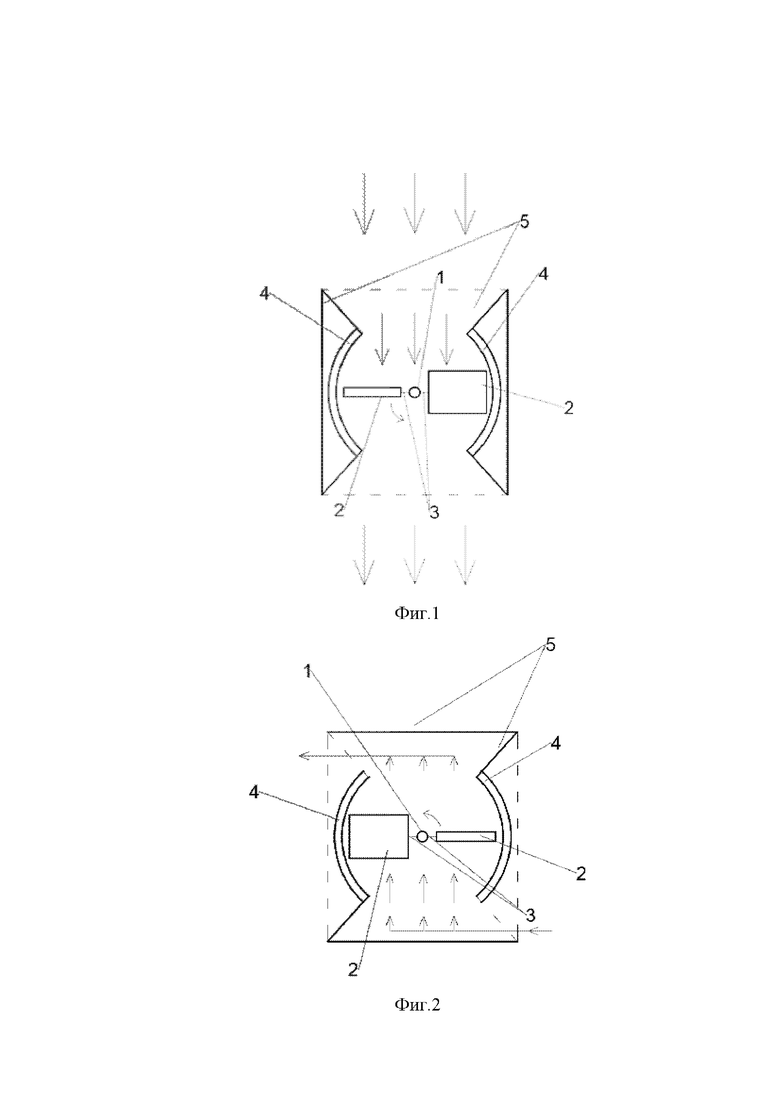
На фиг.1 и 2 представлено горизонтальное сечение ветроэлектростанции с лопастной системой, в которой лопасти установлены с возможностью вращения относительно горизонтальной оси. При этом фиг.1 демонстрирует положение щитов для случаев, когда направление ветра совпадает с направлением, задаваемым открытыми частями корпуса, фиг.2 - положение щитов для направления ветра, перпендикулярного первому варианту.
На фигурах позиции имеют следующее обозначение: 1 - вал лопастной системы, 2 - лопасти, 3 - вал лопасти, 4 - корпус, 5 - щиты.
Осуществление заявляемого технического решения поясняется далее на примере одного из возможных вариантов реализации.
Любым известным способом осуществляют сооружение ветроэлектростанции, выполненной с вертикальной осью вращения, содержащей одну или несколько лопастных систем, включающих лопасти (2), закрепленные с возможностью вращения на валу (3). Вал (1) лопастной системы может быть установлен на фундамент или иное опорное сооружения, а может также, для более надежного закрепления конструкции и возможности создания конструкции с большими площадями лопастей (2), закреплен к раме, которая, в свою очередь, установлена между несколькими сооружениями. Такая конструкция обеспечивает устойчивость и надежность, уменьшает колебательные нагрузки, увеличивает эффективность работы.
Вал (1) может быть закреплен на раме любым известным способом, например, в двух точках – в верхней и нижней частях рамы. Вал (1) конструктивно соединяют с электрогенератором любым известным из уровня техники способом для передачи вращения, вызванного воздействием рабочего воздушного потока на лопасти (2) лопастной системы, в механическую энергию вращения элементов электрогенератора для преобразования ее в электрическую энергию. При этом сам электрогенератор может быть, как непосредственно связан с вращающимся валом (1), так и размещен отдельно с использованием известного способа передачи вращения.
Лопасти (2) выполняют с возможностью изменять положение относительно оси их вращения таким образом, что с одной стороны от вертикальной оси вращения лопастной системы они расположены перпендикулярно направлению рабочего воздушного потока, а с другой стороны параллельно направлению рабочего воздушного потока. Для разворота лопастей (2) на 90° при переходе их с одной стороны лопастной системы на другую используют устройства разворота лопастей (2). Данные устройства могут быть выполнены любым известным из уровня техники способом, например, с помощью приводных механизмов, посредством которых горизонтальный вал (3) лопасти закрепляют к валу (1) лопастной системы. Следует отметить, что возможен и иной вариант размещения лопастей (2), а именно, выполнение их с вертикальной осью вращения. На фигурах данных вариант не представлен, но для специалиста в данной области очевидно, что такой вариант может быть осуществлен, например, путем выполнения на валу (1) лопастной системы каркасов или рам, внутри которых вертикально расположены лопасти. Лопасти могут быть выполнены с возможностью изменять их форму, например, изгибаться вдоль и/или поперек оси их вращения, таким образом, что способны принимать оптимальную форму для максимальной передачи вращающего момента на вал ветроэлектростанции. Для специалиста очевидно, что лопастная система может включать как две лопасти, как изображено на фигурах, так и любое другое количество, которое рассчитывается в зависимости от потребностей как конкретной лопастной системы, так и ветроэлектростанции в целом.
Лопастную систему ветроэлектростанции помещают внутрь корпуса (4) который представляет собой сооружение, имеющее как минимум две открытых части, расположенных, например, друг напротив друга. Корпус (4) может быть сооружен любым известным из уровня техники способом. Преимущественно он имеет круглую в сечении форму, соответствующую по размерам диаметру лопастной системы. Таким образом, лопастная система может беспрепятственно вращаться внутри корпуса, но будут исключены «паразитные» воздушные потоки, проходящие между лопастями (2) и корпусом (4). Две открытые части корпуса (4) предназначены для прохождения рабочего воздушного потока. Таким образом, задают постоянное направление воздушного потока, поступающего на лопасти (2). Однако, направление ветра может изменяться и он может поступать со стороны, противоположной открытым частям корпуса. С целью обеспечить поступление рабочего воздушного потока на лопасти в этом случае, вокруг корпуса (4) могут быть установлены щиты (5). С помощью щитов (5) создают воздушный коридор, направляя движение воздуха к открытым частям корпуса (4) и далее к лопастям (2) лопастной системы.
На фиг.1 показано положение щитов для случаев, когда направление ветра совпадает с направлением, задаваемым открытыми частями корпуса (4). В этом случае щиты (5) расположены таким образом, чтобы не препятствовать прохождению воздушного потока. Фиг.2 демонстрирует положение щитов для тех случаев, когда направление ветра перпендикулярно направлению, задаваемому открытыми частями корпуса (4). В этом случае изменяют положение щитов (5), создавая воздушный коридор. Проходя через этот коридор, воздушный поток направляют к открытым частям корпуса (4) и далее к лопастям (2). Систему управления воздушным потоком, включающую щиты (5) и устройство управления (на фигурах не показано), выполняют таким образом, что выбирают несколько, преимущественно четыре, направлений рабочего воздушного потока и, в зависимости от направления ветра, располагают щиты (5) таким образом, что рабочий поток поступает по одному из этих, заранее предопределенных, направлений либо непосредственно в открытые части корпуса (4), либо через воздушный коридор, создаваемый щитами (5). Для каждого из этих предустановленных направлений рабочего потока рассчитаны и заданы оптимальные углы положения лопастей (2), которые уже не требуют дальнейшей корректировки в случае изменения направления ветра, так как рабочий воздушный поток сохраняет стабильное направление, благодаря щитам (5), которые его регулируют.
Управляют положением щитов (5) с помощью системы управления воздушным потоком (на фигурах не показана). Данная система позволяет обеспечить постоянное направление рабочего воздушного потока. В преимущественном варианте осуществления данная система содержит датчик ветра, с которого получает данные о направлении и силе ветра. В зависимости от направления и силы ветра система управления воздушным потоком выбирает расположение щитов (5) и степень их раскрытия, при котором рабочий воздушный поток, поступающий на лопастную систему, будет оптимальным для достижения требуемой скорости вращения вала (1). Для выполнения указанных функций систему управления воздушным потоком снабжают, например, приводными механизмами щитов (5), выполненными, в частности, в виде сервоприводов. При такой конструкции управление положением лопастей (2) значительно упрощается, так как нет необходимости постоянно пересчитывать и корректировать положение лопастей (2), в зависимости от направления ветра и его силы.
Так как на лопасти (5) поступает постоянный поток их положение не требует частого изменения их положения. Однако, например, при изменении направления рабочего воздушного потока, положение лопастей (2) может корректироваться, в частности, посредством устройства разворота лопастей (2), которое может содержать, в частности, приводные механизмы поворота лопастей (2), выполненные, в частности, в виде сервоприводов.
Для специалиста очевидно, что управление всеми средствами при осуществлении способа требует наличия общего блока управления. Данный блок может быть выполнен любым известным из уровня техники способом, например, в виде персонального компьютера с соответствующим программным обеспечением, имеющим взаимосвязь со всеми узлами, в частности, с устройством управления положением лопастей (2), системой управления воздушным потоком, приводными механизмами, датчиками ветра и т.д.
Представленные чертежи и описание конструкции не исчерпывают возможные варианты исполнения и не ограничивают каким-либо образом объем заявляемого технического решения. Возможны иные варианты исполнения в объеме заявляемой формулы.
Заявленный способ позволяет достичь высокой эффективности и стабильности работы ветроэлектростанции, надежности конструкции, расширения функциональных возможностей, позволяя использовать ветроэлектростанцию при широком диапазоне силы и направленности ветра без необходимости постоянной подстройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лопастная система ветроэлектростанции | 2019 |
|
RU2724359C1 |
| Ветроэлектростанция | 2017 |
|
RU2673280C1 |
| Ветроэлектростанция | 2021 |
|
RU2766497C1 |
| ВЕТРОКОЛЕСО И ВЕТРОЭЛЕКТРОСТАНЦИЯ НА ЕГО ОСНОВЕ | 2010 |
|
RU2468248C2 |
| РОТОРНАЯ ВЕТРОЭЛЕКТРОСТАНЦИЯ | 2010 |
|
RU2425249C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С УЗЛОМ УПРАВЛЕНИЯ ПОВОРОТОМ ЛОПАСТЕЙ | 2010 |
|
RU2451208C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРОЭНЕРГИИ | 2016 |
|
RU2661567C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКИЙ АГРЕГАТ | 2007 |
|
RU2352810C2 |
| ВЕТРОЛЕКТРОСТАНЦИЯ ВЫСОКОЙ МОЩНОСТИ | 2012 |
|
RU2518786C2 |
| ГЕЛИОВЕТРОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2019 |
|
RU2714584C1 |
Изобретение относится к способу управления положением лопастей лопастной системы ветроэлектростанции. Способ управления положением лопастей лопастной системы ветроэлектростанции, имеющей вертикальную ось вращения, характеризуется тем, что лопасти закрепляют с возможностью вращения на валу и выполняют с возможностью изменять их положение относительно оси их вращения таким образом, что с одной стороны от вертикальной оси вращения лопастной системы лопасть расположена перпендикулярно направлению воздушного потока, поступающего на лопастную систему, а с другой стороны параллельно, обеспечивают разворот лопастей на 90° при переходе лопастей с одной стороны лопастной системы относительно оси её вращения на другую посредством устройства разворота лопастей. Вал выполняют с возможностью конструктивного соединения с генератором. Обеспечивают постоянное направление воздушного потока, поступающего на лопастную систему, относительно оси вращения лопастной системы посредством системы управления воздушным потоком. Изобретение направлено на стабильную работу ветроэлектростанции при широком диапазоне силы и направленности ветра. 6 з.п. ф-лы, 2 ил.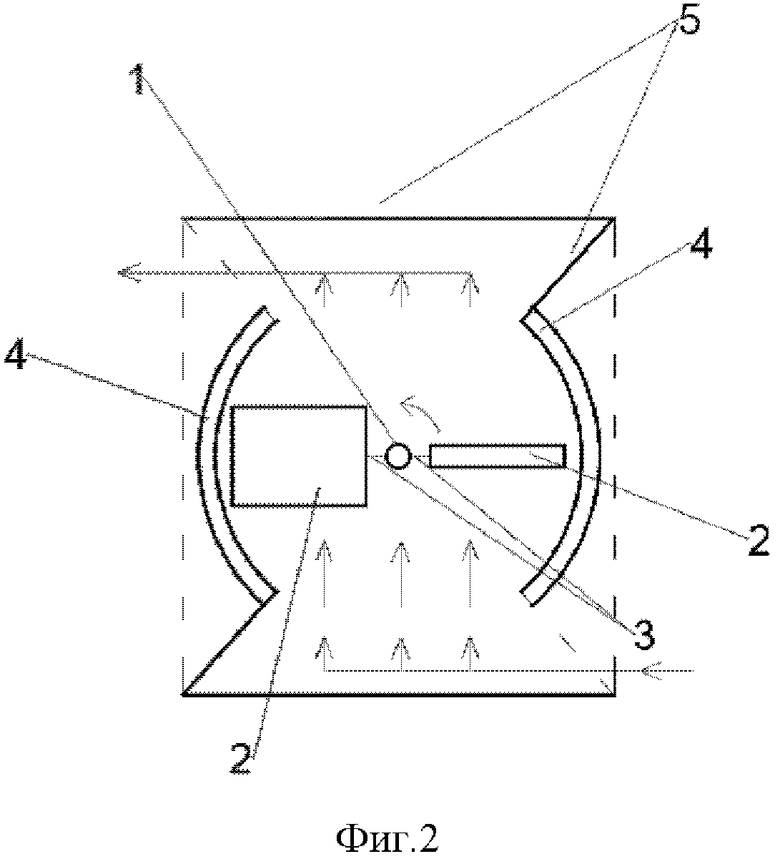
1. Способ управления положением лопастей лопастной системы ветроэлектростанции, имеющей вертикальную ось вращения, характеризующийся тем, что лопасти закрепляют с возможностью вращения на валу и выполняют с возможностью изменять их положение относительно оси их вращения таким образом, что с одной стороны от вертикальной оси вращения лопастной системы лопасть расположена перпендикулярно направлению воздушного потока, поступающего на лопастную систему, а с другой стороны параллельно, обеспечивают разворот лопастей на 90° при переходе лопастей с одной стороны лопастной системы относительно оси её вращения на другую посредством устройства разворота лопастей, вал выполняют с возможностью конструктивного соединения с генератором, отличающийся тем, что обеспечивают постоянное направление воздушного потока, поступающего на лопастную систему, относительно оси вращения лопастной системы посредством системы управления воздушным потоком.
2. Способ управления положением лопастей лопастной системы по п. 1, отличающийся тем, что лопасти закрепляют с возможностью вращения относительно горизонтальной или вертикальной оси вращения.
3. Способ управления положением лопастей лопастной системы по п. 1, отличающийся тем, что систему управления воздушным потоком выполняют в виде щитов, положение которых устанавливает устройство управления, подключенное к датчику ветра.
4. Способ управления положением лопастей лопастной системы по п. 3, отличающийся тем, что систему управления снабжают приводными механизмами щитов.
5. Способ управления положением лопастей лопастной системы по п. 1, отличающийся тем, что устройство разворота лопастей снабжают приводными механизмами поворота лопастей.
6. Способ управления положением лопастей лопастной системы по п. 1, отличающийся тем, что систему управления воздушным потоком выполняют с возможностью регулировать объем поступающего на лопасти воздушного потока.
7. Способ управления положением лопастей лопастной системы по п. 1, отличающийся тем, что лопасти выполнены с возможностью изменения их формы.
| CN 104564493 A, 29.04.2015 | |||
| Газогенератор для дров, торфа и кизяка | 1921 |
|
SU376A1 |
| Машина для уборки подсолнуха | 1932 |
|
SU29299A1 |
| Парусный ветродвигатель | 1983 |
|
SU1178931A1 |
| WO 1992004542 A1, 19.03.1992 | |||
| ПРИБОР ДЛЯ ГРАФИЧЕСКОГО ПОСТРОЕНИЯ ПРИ ПРОИЗВОДСТВЕ, НАПРИМЕР, ТЯГОВЫХ РАСЧЕТОВ КРИВЫХ ВИДА dv/dt=dl/dt=tgα | 1948 |
|
SU84067A1 |
| Ветрогидроэнергетическая установка | 1990 |
|
SU1787208A3 |

