ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка связана с заявкой на патент США № _________, поданной 30 марта 2015 г. (номер дела 83512203(65080-1539)), под названием “KEY FOB TRANSMISSION COMPENSATION” и заявкой на патент № _________, поданной 30 марта 2015 г. (номер дела 83512215(65080-1566)), под названием “FOB CASE FOR REDUCED TRANSMISSION INTERFERENCE”, полное содержание которых настоящим в полном объеме включено в данный документ путем ссылки.
УРОВЕНЬ ТЕХНИКИ
[0001] Система удаленного бесключевого доступа (система RKE) включает в себя удаленное устройство, иногда называемое брелоком или брелоком для ключей, используемое оператором транспортного средства и находящееся в сообщении с базовым блоком, встроенным в транспортное средство. Дальность действия системы RKE, т.е. расстояние между брелоком, управляемым оператором транспортного средства, и базовым блоком, представляет собой характеристику воспринимаемого качества системы. Дальность действия системы изменяется согласно выходной радиочастотной (RF) мощности брелока, которая ограничена федеральными нормами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0002] Фиг. 1 представляет собой схему примерной системы удаленного бесключевого доступа.
[0003] Фиг. 2 представляет собой блок-схему примерной системы удаленного бесключевого доступа на Фиг. 1.
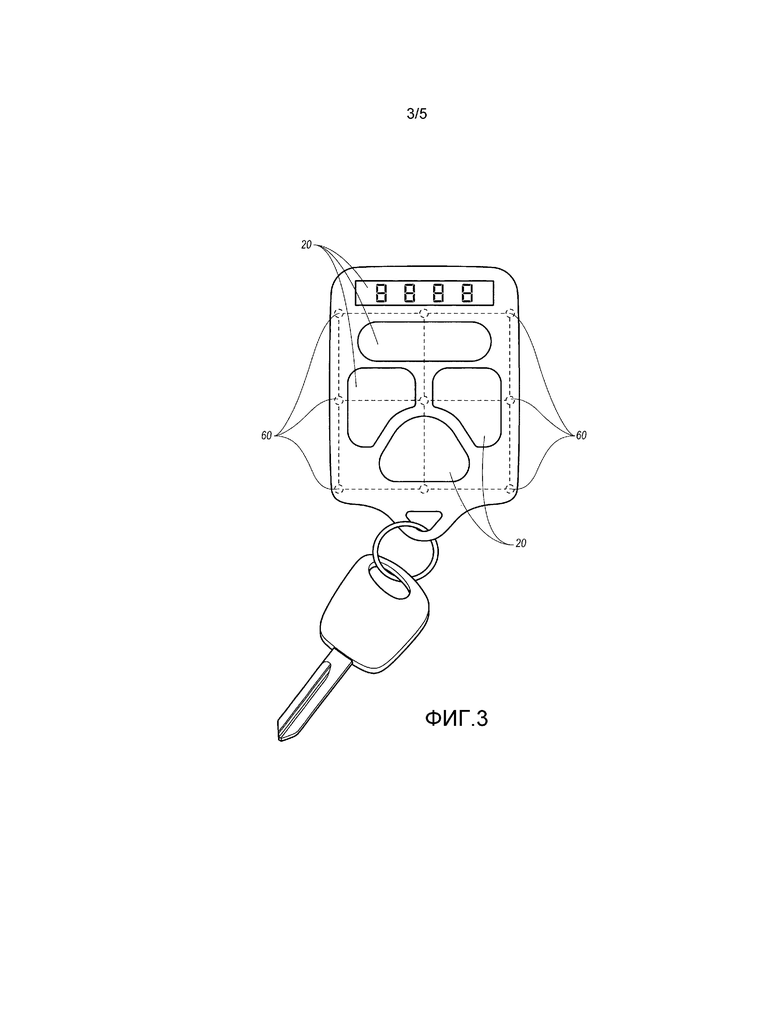
[0004] Фиг. 3 представляет собой вид в перспективе брелока на Фиг. 1, включающего в себя массив выводов емкостных датчиков.
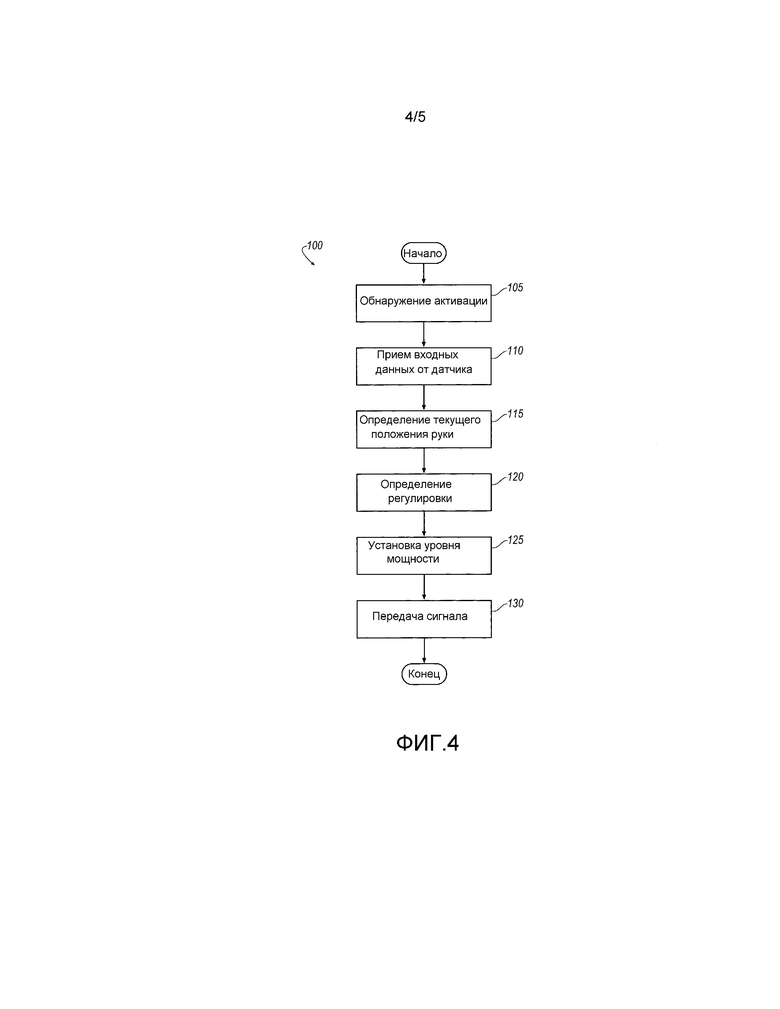
[0005] Фиг. 4 представляет собой схему примерного процесса для регулировки установленной выходной мощности на основании обнаружения руки, управляющей брелоком на Фиг. 1.
[0006] Фиг. 5 представляет собой схему примерного процесса использования внутреннего механизма обратной связи для регулировки установленной выходной мощности брелока на Фиг. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
ВВЕДЕНИЕ
[0007] Регулируемый уровень мощности брелока измеряется в «свободном пространстве» без касания руки человека или вблизи брелока. Рука человека вблизи приемопередающей антенны в брелоке может создавать помехи передачи и уменьшать выходную мощность RF. Взаимодействие человека с брелоком может изменять диаграмму направленности антенны так, что имеется меньший коэффициент усиления в направлении транспортного средства. Дополнительно, когда аккумулятор брелока подходит к концу срока службы (израсходована большая часть его заряда), выходная мощность брелока может уменьшаться. Уменьшенная выходная мощность уменьшает дальность действия системы RKE, что потенциально приводит к неудовлетворенности оператора.
[0008] Фиг. 1 иллюстрирует примерную систему 10 удаленного бесключевого доступа (RKE) 10 для транспортного средства 12, включающую в себя один или более механизмов регулировки выходной мощности для компенсации помех от объекта, например, оператора. Система 10 RKE обеспечивает удаленное управление от брелока 14 для различных областей применения в транспортном средстве 12, таких как блокировка дверей, закрытие багажника, внутреннее и внешнее освещение, запуск двигателя, управление климатом и т.д. Транспортное средство 12 представляет собой в общем наземное транспортное средство, имеющее два или более колес, например, легковой автомобиль, грузовой автомобиль малой грузоподъемности, мотоцикл и т.д. Транспортное средство 12 включает в себя базовую станцию 16 для приема сообщений от брелока 14 и, возможно, передачи сообщений брелоку 14.
[0009] Брелок 14 передает сообщения базовой станции 16 и также может принимать сообщения от базовой станции 16. Брелок 14 включает в себя корпус 18 и интерфейс 20. Интерфейс 20 принимает входные данные от и обеспечивает выходные данные оператору.
[0010] Для определения установленной выходной мощности брелок 14 может включать в себя один или более датчиков для обнаружения присутствия оператора вблизи или удерживающего брелок 14. Брелок 14 может дополнительно включать в себя один или более механизмов обратной связи для обнаружения фактического уровня выходной мощности и сравнения обнаруженного уровня выходной мощности с сохраненным пороговым значением. На основании информация от датчиков и/или механизмов обратной связи брелок 14 может регулировать уровень выходной мощности. Регулировка уровня выходной мощности брелока 14 для компенсации помех позволяет, например, брелоку 14 находиться в сообщении с транспортным средством 12 на большей дальности действия и может увеличивать удовлетворенность оператора системой 10 RKE. В дополнение к регулировке уровня выходной мощности брелока 14 регулировки других параметров связи, таких как режим сна (время задержки между отправкой передачи и приемом отклика), скорость передачи данных, время преамбулы и т.д., могут быть выполнены.
ЭЛЕМЕНТЫ СИСТЕМЫ
[0011] Как показано на фиг. 2, транспортное средство 12 включает в себя базовый блок 16 и дополнительно включает в себя блоки 38 управления и интерфейс 40.
[0012] Базовая станция 16 включает в себя контроллер 30, включающий в себя процессор 31 для выполнения программ, сохраненных в памяти 33. Базовая станция 16 дополнительно включает в себя приемник 32 и передатчик 34, оба в сообщении с контроллером 30. Базовая станция 16 дополнительно включает в себя один или более приемопередающих антенн 36 для приема выходных сигналов от брелока 14 и передачи выходных сигналов приемнику 32. В случае если базовая станция 16 включает в себя передатчик 34, передатчик 34 также может использовать одну или более приемопередающих антенн 36 для передачи сообщений брелоку 14.
[0013] Базовая станция 16 находится в непосредственном или опосредованном сообщении с одним или более блоками 38 управления. Блоки 38 управления могут управлять различными функциями транспортного средства 12, такими как блокировка дверей, закрытие багажника, внутреннее/внешнее освещение, управление климатом, запуск двигателя и т.д. Каждый блок 38 управления может иметь процессор для приема инструкций от базовой станции и управления приводом. Например, блок управления блокировкой двери может включать в себя процессор и двигатель (или соленоид) для открытия/закрытия дверного замка. Дополнительно блоки 38 управления могут иметь возможность отправки сообщений контроллеру 30 базовой станции 16. Например, блок 38 управления блокировкой двери может отправлять сигнал контроллеру 30 базовой станции 16, что дверь заблокирована.
[0014] Сообщение между контроллером 30 и блоками 38 управления может быть осуществлено через сетевую шину, например, шину CAN (сеть контроллеров), или другие проводные или беспроводные механизмы. Контроллер 30 может включать в себя один или более процессоров. В случае если контроллер 30 включает в себя более одного процессора, сообщение между процессорами также может быть осуществлено через сетевую шину. В дополнение, контроллер 30 может быть выполнен с возможностью сообщения с другими устройствами посредством различных проводных и/или сетевых технологий, например, сотовой связи, Bluetooth® универсальной последовательной шины (USB), проводных и/или беспроводных пакетных сетей и т.д.
[0015] Дополнительно, транспортное средство 12 в общем включает в себя интерфейс 40. В общем, интерфейс 40 оборудован для приема входных данных для и/или обеспечения выходных данных от контроллера 30. Например, транспортное средство 12 может включать в себя один или более дисплеев, выполненных с возможностью обеспечения графического интерфейса оператора (GUI) или т.п., систему интерактивного речевого ответа (IVR), устройства звукового вывода, механизмы для обеспечения тактильного вывода и т.д., обеспечивающие сообщение между транспортным средством 12 и оператором. Дополнительно устройство оператора, например, портативное вычислительное устройство, такое как планшетный компьютер, смартфон или т.п. может быть использовано для обеспечения некоторых или всех интерфейсов 40 контроллеру 30. Например, устройство оператора может быть соединено с контроллером 30 с использованием технологий, рассмотренных выше, например, USB, Bluetooth® и т.д., и может быть использовано для приема входных данных для и/или обеспечения выходных данных от контроллера 30.
[0016] Контроллер 30 может быть выполнен непосредственно или опосредованно, т.е. посредством другого вычислительного устройства в транспортном средстве 12, с возможностью сообщения с сетью 21. Сеть 21 представляет собой один или более механизмов, посредством которых транспортное средство 12 может находиться в сообщении с удаленными вычислительными устройствами, и может представлять собой один или более различных проводных или беспроводных механизмов связи, включающих в себя любую желаемую совокупность проводных (например, кабель и волокно) и/или беспроводных (например, сотовая связь, беспроводная связь, спутниковая связь, микроволновая частота и радиочастота) механизмов связи и любую желаемую топологию сети (или топологии при использовании множества механизмов связи). Примерные сети связи включают в себя беспроводные сети связи (например, с использованием Bluetooth, IEEE 802.11 и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включая Интернет, обеспечивающие службы передачи данных.
[0017] Как показано на фиг. 2, брелок 14 включает в себя контроллер 50, включающий в себя процессор 51 и память 53. Процессор 51 выполнен с возможностью выполнения программ, сохраненных в памяти 53, и управления различными функциями брелока 14, например, передачей сообщений транспортному средству 12, приемом сообщений от транспортного средства 12, калибровкой уровня выходной мощности и т.д. Как описано ниже, процессор 51 также может быть запрограммирован с возможностью выполнения одного или более процессов для регулировки уровня выходной мощности во время работы.
[0018] Брелок 14 дополнительно включает в себя передатчик 52 и по меньшей мере одну приемопередающую антенну 56. Передатчик 52 соединен с возможностью сообщения с контроллером 50 и выполнен с возможностью передачи сообщений RF посредством приемопередающей антенны 56 транспортному средству 12. Передатчик 52 включает в себя механизм калибровки для установки максимальной установленной выходной мощности и механизм установки для регулировки уровня выходной мощности во время работы.
[0019] Для поддержки двусторонней связи брелок 14 может включать в себя приемник 54, соединенный с возможностью сообщения с контроллером 50. Приемник 54 может быть выполнен с возможностью приема посредством приемопередающей антенны 56 связи RF от, например, транспортного средства 12.
[0020] По меньшей мере одна приемопередающая антенна 56 может включать в себя, например, первую и вторую приемопередающие антенны 56. При некоторых рабочих условиях процессор 51 может быть запрограммирован с возможностью использования и первого, и второго приемопередатчика 56 в сбалансированной конфигурации для передачи или приема сообщения. То есть в режиме передачи каждая из первой и второй приемопередающих антенн 56 может передавать, например, на по существу равном уровне мощности. При других рабочих условиях процессор 51 может быть запрограммирован с возможностью выбора использования одной из двух приемопередающих антенн 56 для передачи или приема и отключения другой антенны 56 во время передачи или приема. В других рабочих условиях процессор 51 может регулировать настройку между первой и второй приемопередающими антеннами. Как описано ниже, процессор может учитывать рабочие условия, такие как положение руки, удерживающей брелок 14, для определения используемых антенн, количества антенн и настройки между приемопередающими антеннами 56 для передачи или приема.
[0021] Как рассмотрено выше, брелок 14 включает в себя интерфейс 20 для приема входных данных от и обеспечения выходных данных оператору, например, водителю транспортного средства 12. Интерфейс 20 включает в себя одно или более устройств ввода и может включать в себя дисплей. Устройства ввода могут представлять собой кнопки, дисплей с сенсорным экраном, устройство обнаружения жестов и т.д. для приема входных данных от оператора. Дисплей может включать в себя LCD-дисплей, светодиодный дисплей, звуковые сигнализаторы, динамики, тактильную обратную связь и т.д. для обеспечения информации оператору.
[0022] Брелок 14 может включать в себя один или более датчиков 60, которые могут быть соединены с возможностью сообщения с контроллером 50. Датчики 60 могут быть использованы для обнаружения присутствия объекта, например, руки человека, вблизи или в непосредственном контакте с брелоком 14. Датчики 60 могут дополнительно обнаруживать, находится ли объект вблизи приемопередающей антенны 56. Например, датчики 60 могут включать в себя один или более емкостных датчиков, резистивных датчиков, электромагнитных датчиков, оптических датчиков и т.д. В дополнение к обнаружению присутствия объекта и близости объекта к приемопередающей антенне 56 датчики 60 могут обнаруживать, например, размер, положение, ориентацию, проводимость или другие характеристики объекта. Датчики 60 могут быть расположены в матрице, например, матрица 3x3 емкостных датчиков, распределенных по поверхности брелока 14 для того, чтобы принимать дополнительную информацию, касающуюся характеристик объекта вблизи брелока 14.
[0023] В качестве дополнения или альтернативы, датчики 60 могут включать в себя акселерометры, гироскопы, датчики магнитного поля и т.д., используемые для обнаружения перемещения или ориентации брелока 14. Процессор 51 может быть запрограммирован, например, на основании перемещения брелока 14, которое обнаруживается одним или более датчиками 60, с возможностью определения, удерживается ли брелок 14 человеком, находится ли в кармане человека, является неподвижным и т.д.
[0024] Брелок 14 может дополнительно включать в себя механизм 62 обратной связи для отправки сигнала обратной связи, характеризующего уровень выходной мощности, контроллеру 50. Механизм обратной связи может включать в себя радиочастотный (RF) элемент 63 обнаружения. RF элемент 63 обнаружения может представлять собой, например, дорожки на печатной плате, удаленные от приемопередающей антенны 56. В качестве дополнения или альтернативы, в случае, когда имеется более одной приемопередающей антенны 56, контроллер 50 может управлять брелоком 14 таким образом, что, когда одна приемопередающая антенна 56 используется для передачи сообщения, другая приемопередающая антенна 56 используется в качестве RF элемента 63 обнаружения.
[0025] Аккумулятор 64 подает питание брелоку 14. Брелок 14 может включать в себя блок (SOC) 66 состояния заряда для отслеживания состояния заряда аккумулятора 64. SOC 66 может отслеживать выходное напряжение, выходной ток, выходное сопротивление и т.д. аккумулятора 64. На основании этих отслеживаемых значений вычислительное устройство в SOC 66, процессор 51 или другое вычислительное устройство может определять оценочное состояние заряда аккумулятора 64. На основании определения состояния низкого заряда аккумулятора процессор 51 может регулировать уровень выходной мощности и/или регулировать другие параметры связи. В качестве дополнения или альтернативы, процессор 51 может сообщать информацию о состоянии заряда транспортному средству 12.
КАЛИБРОВКА МАКСИМАЛЬНОГО УРОВНЯ ВЫХОДНОЙ МОЩНОСТИ
[0026] Для уменьшения или по возможности исключения помех другим системам связи, и когда применимо для соответствия нормам, брелок 14 может быть откалиброван для передачи на уровне выходной мощности меньшем или равным максимальному уровню мощности. Испытание может быть проведено на примерном образце брелока 14 согласно конкретному типу конструкции или модели. Брелок 14 может передавать сообщение на известной установленной выходной мощности при известных условиях. Для предотвращения помех из-за присутствия руки человека или других проводящих объектов, брелок 14 может быть активирован (например, кнопка передачи может быть нажата), посредством объекта, изготовленного из непроводящего материала. Уровень выходной мощности может быть измерен блоком измерения на известном расстоянии, например, один метр, три метра и т.д. от брелока 14. На основании измеренного уровня выходной мощности значение компонента в передатчике 52 брелока 14 может быть отрегулировано, или определена корректировка установленного уровня мощности. Регулировка компонента или корректировка установленного уровня мощности может быть включена при изготовлении брелоков 14 с одним типом конструкции или моделью. Например, первоначальный или первый установленный уровень мощности, соответствующий максимальному уровню мощности в условиях калибровки, может быть сохранен в памяти 53 контроллера 50.
КОМПЕНСАЦИЯ ДЛЯ РЕГУЛИРОВКИ ПОМЕХ НА ОСНОВАНИИ ОБНАРУЖЕНИЯ ОБЪЕКТА
[0027] Объект, например, рука человека, вблизи приемопередающей антенны 56 брелока 14 может вызывать уменьшение уровня выходной мощности брелока 14 и создавать помехи передачи. Как отмечено выше, Взаимодействие человека с брелоком может изменять диаграмму направленности антенны так, что имеется меньший коэффициент усиления в направлении транспортного средства. Это может вызывать уменьшение дальности действия системы RKE, и приводить к уменьшению удовлетворенности оператора. Для компенсации уменьшения уровня выходной мощности брелок 14 может регулировать установленную выходную мощность на основании обнаружения объекта вблизи приемопередающей антенны 56. Близость к приемопередающей антенне 56 может быть определена, например, как непосредственный контакт с по меньшей мере одним датчиком 60 на корпусе 18 брелока 14. В качестве другого примера, близость к приемопередающей антенне 56 может быть определена как касание корпуса брелока 14 в пределах трех сантиметров от приемопередающей антенны 56 на конкретной стороне брелока 14 (например, стороне, обычно направленной к транспортному средству 12, когда брелок 14 работает). В качестве еще одного примера, близость к приемопередающей антенне 56 может быть определена как нахождение в пределах обнаруживаемой дальности действия системы 60 распознавания жестов, включенной в брелок 14, например, пять сантиметров.
[0028] Датчики 60 могут быть использованы для обнаружения присутствия объекта вблизи приемопередающей антенны 56. Датчики 60 при обнаружении объекта могут обеспечивать данные контроллеру 50. Например, один или более емкостных датчиков 60 могут быть включены в корпус 18 брелока 14. Один или более емкостных датчиков 60 могут быть размещены с возможностью обнаружения руки или другого объекта, касающегося брелока 14 в трех сантиметрах или менее от приемопередающей антенны 56.
[0029] В качестве другого примера, датчики 60 могут включать в себя датчики жестов или близости, которые известны, например, оптические, емкостные, магнитные датчики 60. Датчики 60 могут обнаруживать присутствие руки или другого объекта в пространстве близком к приемопередающей антенне 56, находится или нет объект в непосредственном контакте с брелоком 14.
[0030] На основании обнаружения объекта датчики 60 могут отправлять сообщение процессору 51, указывающее присутствие объекта вблизи приемопередающей антенны 56. На основании сообщения процессор 51 может регулировать установленную выходную мощность посредством заданного коэффициента регулировки. Заданный коэффициент регулировки может представлять собой величину, определенную для компенсации уровня выходной мощности для помех, вызываемых объектом, без превышения максимального уровня мощности. Заданный коэффициент регулировки может быть определен эмпирически. Например, испытания могут быть проведены в управляемой среде для определения минимальной потери мощности, которая возникает, когда объект находится вблизи приемопередающей антенны 56. Заданный коэффициент регулировки может быть определен для компенсации минимальной потери мощности. Запас на погрешность может быть включен в определение заданного коэффициента регулировки для обеспечения изменений производительности отдельных блоков и изменений из-за различий между объектами.
[0031] В дополнение к обнаружению присутствия объекта вблизи приемопередающей антенны 56 датчики 60 могут обнаруживать и сообщать процессору 51 дополнительные характеристики, касающиеся объекта. Например, как показано на фиг. 3, брелок 14 может включать в себя матрицу 60 емкостных датчиков, включающую в себя множество емкостных датчиков, размещенных в различных положениях на брелоке 14. На основании сигналов от матрицы 60 емкостных датчиков процессор 51 может определять, что объект находится, например, вблизи правой стороны брелока 14. На основании определения процессор 51 может, например, использовать первую приемопередающую антенну 56 на левой стороне брелока 14 для передачи сообщения и отключать вторую приемопередающую антенну 56 на правой стороне брелока 14, или регулировать настройку между первой и второй приемопередающими антеннами 56.
[0032] В качестве другого примера, на основании входных данных от датчиков 60 контроллер 50 может оценивать уровень помех. Процессор 51 может принимать входные данные, например, что объект покрывает небольшую область или большую область, окружающую приемопередающую антенну 56, и выбирать один или более заданных коэффициентов регулировки на основании оценочного уровня помех.
[0033] Как отмечено выше, в дополнение к регулировке уровня выходной мощности брелока 14 регулировки других параметров связи, таких как режим сна, скорость передачи данных, время преамбулы и т.д., могут быть выполнены.
[0034] Датчики 60 могут быть использованы для предотвращения случайной активации брелока 14. Например, процессор 51 может быть запрограммирован с возможностью приема входных данных от интерфейса 20, только когда на основании входных данных от датчиков 60 контроллер определяет, что объект (такой как, рука человека) находится в контакте с брелоком 14.
[0035] В качестве дополнения или альтернативы, некоторые датчики 60 могут быть активированы (включены), только когда процессор 51 принял входные данные от интерфейса 20. Таким образом, потребление мощности датчиков 60 может быть уменьшено.
РЕГУЛИРОВКА НА ОСНОВАНИИ ОБРАТНОЙ СВЯЗИ
[0036] Механизм 62 обратной связи может быть использован для отслеживания и регулировки уровня выходной мощности брелока 14. Как описано выше, RF элемент 63 обнаружения или другая антенна, включенная в брелок 14, может принимать выходной сигнал от приемопередающей антенны 56. RF элемент 63 обнаружения или другая антенна может передавать выходной сигнал механизму 62 обратной связи. На основании принимаемого выходного сигнала механизм обратной связи может обеспечивать сигнал обратной связи процессору 51. Путем отслеживания сигнала обратной связи процессор 51 может узнавать, когда выходной сигнал приближается к максимальному уровню мощности.
[0037] В примерном процессе процессор 51 первоначально определяет уровень сигнала обратной связи, соответствующий максимальному уровню мощности. Во время калибровки, как описано выше, примерный брелок 14 регулируется для работы на максимальном уровне мощности. Во время работы на максимальном уровне мощности контроллер 50 может принимать и сохранять в памяти 53 уровень сигнала обратной связи, соответствующий максимальному уровню мощности. На основании по меньшей мере частично этого уровня сохраненное пороговое значение может быть определено. Например, сохраненное пороговое значение может быть определено как уровень сигнала обратной связи во время работы брелока 14 на максимальном уровне мощности минус коэффициент запаса, который описан ниже.
[0038] Во время передачи брелоком 14 в стандартном режиме работы сигнал обратной связи может отслеживаться процессором 51. Если сигнал обратной связи ниже сохраненного порогового значения, процессор 51 может увеличивать установленную выходную мощность.
[0039] Коэффициент запаса может быть определен для учета изменений в процессе изготовления брелока 14. Коэффициент запаса может дополнительно быть определен для учета ожидаемого изменения уровня выходной мощности на основании наименьшей доступной регулировки для установленной мощности. Другими словами, сохраненное пороговое значение может быть выбрано так, что регулировка установленной мощности не будет приводить к превышению максимального уровня мощности. Сохраненное пороговое значение может быть сохранено в памяти 53 других брелоков 14 такой же конструкции во время процесса изготовления.
[0040] В качестве примера, контроллер 50 может постепенно увеличивать установленную выходной мощности. Прирост увеличения может представлять собой постоянную величину, основанную на характеристиках передатчика 52 брелока 14. Например, установленная выходная мощность может иметь постоянное количество значений, и контроллер 50 может выбирать следующее более высокое значение. В качестве альтернативы, прирост увеличения может быть вычислен на основании уровня сигнала обратной связи. Процессор 51 может вычислять значение регулировки на основании сигнала обратной связи, указывающего, насколько установленная выходная мощность может быть увеличена до приближения без превышения к максимальной выходной мощности. Процессор 51 может далее увеличивать установленную выходную мощность согласно значению регулировки. После увеличения установленной выходной мощности процессор 51 может продолжать отслеживание сигнала обратной связи для определения, требуется ли дополнительная корректировка.
[0041] В дополнение к регулировке установленной выходной мощности на основании сигнала обратной связи процессор 51 может быть запрограммирован с возможностью регулировки настройки приемопередающих антенн 56. Например, процессор 51 может перераспределять настройку между первой и второй приемопередающими антеннами 56 так, что, например, первая приемопередающая антенна 56 передает на более высоком уровне мощности, чем вторая приемопередающая антенна 56, и определять, повышается ли уровень сигнала обратной связи на основании перераспределения.
[0042] В случае, когда брелок 14 работает неисправно так, что сигнал обратной связи превышает сохраненное пороговое значение, процессор 51 также может быть запрограммирован с возможностью уменьшения установленной выходной мощности, и/или, если условие сохраняется, отключения передатчика 52 брелока 14. Регулировки других параметров связи также могут быть выполнены.
[0043] Процессор 51 может дополнительно быть запрограммирован с возможностью использования данных от датчиков 60, а также обратной связи от механизма 62 обратной связи для регулировки установленной выходной мощности брелока 14. В качестве примера, процессор 51 может быть запрограммирован, как описано выше, с возможностью регулировки установленной выходной мощности посредством заданной величины на основании данных, принимаемых от датчиков 60. После регулировки контроллер 50 может определять на основании сигнала обратной связи от механизма 62 обратной связи, необходима ли дополнительная регулировка.
СООБЩЕНИЕ ХАРАКТЕРИСТИК АККУМУЛЯТОРА
[0044] Брелок 14 может включать в себя блок (SOC) 66 состояния заряда для оценки оставшегося заряда в аккумуляторе 64. SOC 66 может измерять выходное напряжение, выходной ток, выходное сопротивление и т.д. аккумулятора во время работы и на основании этих измерений определять характеристики аккумулятора 64, например, оценочный оставшийся заряд. На основании определенных характеристик аккумулятора 64 брелок 14 может регулировать рабочие характеристики брелока 14. Например, если определено, что выходное напряжение аккумулятора 64 падает из-за состояния низкого заряда, процессор 51 может регулировать установленную мощность передатчика 52 или регулировать другие параметры связи. В качестве дополнения или альтернативы, брелок 14 может сообщать характеристики базовой станции 16 транспортного средства 12.
[0045] Подобным образом, базовая станция 16 может на основании характеристик аккумулятора 64 регулировать работу базовой станции 16. Например, если базовая станция 16 принимает сообщение, что оценочный оставшийся заряд аккумулятора 64 ниже первого порогового уровня заряда, базовая станция 16 может увеличивать чувствительность приемника 32 базовой станции 16. Первый пороговый уровень заряда может быть эмпирически определен как уровень заряда, при котором, например, выходная мощность передачи уменьшается приблизительно на 20% в брелоке 14 конкретной конструкции.
[0046] В качестве другого примера, когда базовая станция 16 принимает сообщение, что оценочный оставшийся заряд в аккумуляторе 64 ниже второго порогового уровня заряда, базовая станция 16 может, например, посредством интерфейса 40, отображать сообщение, что аккумулятор 64 подходит к концу срока службы, или, если применимо, должен быть перезаряжен. Второй пороговый уровень заряда может быть эмпирически определен как уровень заряда, при котором, например, аккумулятор 64 может поддерживать определенные рабочие условия для 100 оценочных дополнительных передач брелока 14. Базовая станция 16 может дополнительно, например, обеспечивать информацию, относящуюся к состоянию аккумулятора 64, оператору посредством сети 21, например, посредством электронной почты.
ПРИМЕРНЫЕ ПРОЦЕССЫ
[0047] Фиг. 4 представляет собой схему примерного процесса 100 для компенсации помех для брелока 14 на основании обнаружения объекта вблизи приемопередающей антенны 56 брелока 14, в общем выполняемого согласно инструкциям посредством процессора 51.
[0048] Процесс 100 начинается в блоке 105, в котором брелок 14 обнаруживает входные данные оператора от интерфейса 20. Например, интерфейс 20 может включать в себя множество кнопок. Оператор транспортного средства 12 может нажимать одну из кнопок, обеспечивая входные данные процессору 51. Процессор 51 определяет на основании входных данных, что оператор желает передать сообщение транспортному средству 12. Процесс 100 продолжается в блоке 110.
[0049] В блоке 110 процессор 51 принимает входные данные от одного или более датчиков 60. Как описано выше, датчики 60 могут обеспечивать входные данные об обнаружении, указывающие, что объект находится в непосредственном контакте с брелоком 14, и могут указывать положение или положения на брелоке 14, которые непосредственно контактируют с объектом. Датчики 60 могут дополнительно указывать, находится ли объект вблизи приемопередающей антенны 56 брелока 14. Дополнительно датчики 60 могут обеспечивать другую информацию, такую как ориентация брелока 14, перемещение брелока 14 и т.д. Процессор 51 может принимать и сохранять входные данные от датчиков 60. Процесс 100 продолжается в блоке 115.
[0050] В блоке 115 процессор 51 может определять характеристики объекта. Например, на основании положения или положений брелока 14 в непосредственном контакте с объектом контроллер 50 может определять, что брелок 14 удерживается рукой на правой стороне или левой стороне. На основании входных данных, указывающих ориентацию или перемещение брелока 14, процессор 51 может определять, например, что брелок 14 удерживается в горизонтальном положении. Процессор 51 может определять другие характеристики объекта, например, степень, в которой объект покрывает брелок 14, проводимость объекта и т.д. Процесс 100 продолжается в блоке 120.
[0051] В блоке 120 процессор 51 может определять регулировку установленного уровня мощности. Как описано выше, установленная выходная мощность может регулироваться посредством заданного коэффициента регулировки. Заданный коэффициент регулировки может представлять собой постоянное значение или может быть выбран из нескольких заданных коэффициентов регулировки на основании определенных характеристик объекта. Процесс 100 продолжается в блоке 125.
[0052] В блоке 125 процессор 51 регулирует установленную выходную мощность передатчика 52 брелока 14 согласно заданному коэффициенту регулировки, определенному в блоке 120. Как описано выше, процессор 51 может отправлять инструкцию передатчику 52, и на основании инструкции передатчик 52 может регулировать установленную выходную мощность с учетом заданного коэффициента регулировки. В качестве дополнения или альтернативы, процессор 51 может регулировать другие параметры связи. Процесс 100 продолжается в блоке 130.
[0053] В блоке 130 процессор 51 дает инструкцию передатчику 52 брелока 14 для передачи сообщения транспортному средству 12. Передатчик 52 передает сообщение при установленной выходной мощности, установленной в блоке 125. Процесс 100 может завершаться при окончании передачи.
[0054] Фиг. 5 представляет собой схему примерного процесса 200 для компенсации помех для брелока 14 на основании обратной связи от механизма 62 обратной связи, в общем выполняемого согласно инструкциям посредством процессора 51.
[0055] Процесс 200 начинается в блоке 205, в котором брелок 14 обнаруживает входные данные оператора от интерфейса 20. Как описано в отношении процесса 100, интерфейс 20 может включать в себя множество кнопок. Оператор транспортного средства 12 может нажимать одну из кнопок, обеспечивая входные данные контроллеру 50. Процессор 51 определяет на основании входных данных, что оператор желает передать сообщение транспортному средству 12. Процесс 200 продолжается в блоке 210.
[0056] В блоке 210 процессор 51 устанавливает и/или увеличивает установленный уровень мощности передатчика 52 брелока 14. Для первоначальной передачи после обнаружения входных данных оператора в блоке 205 процессор 51 может устанавливать установленный уровень мощности на первоначальную установленную мощность. Первоначальный уровень мощности может представлять собой, например, первоначальную установленную мощность, определенную в результате калибровки брелока 14, как описано выше. Для последующей передачи установленная мощность может быть постепенно увеличена. Величина увеличения может быть постоянной величиной или величиной, определяемой на основании значения сигнала обратной связи, как описано выше. В качестве дополнения или альтернативы, процессор 51 может выполнять регулировки других параметров связи. Процесс 200 продолжается в блоке 215.
[0057] В блоке 215 брелок 14 передает сообщение транспортному средству 12. Процессор 51 отправляет инструкцию передатчику 52, который передает сообщение при установленной мощности, установленной в блоке 210. Процесс 200 продолжается в блоке 220.
[0058] В блоке 220 процессор 51 определяет, меньше ли значение сигнала обратной связи, чем сохраненное пороговое значение. Механизм 62 обратной связи обеспечивает сигнал обратной связи контроллеру, указывающий уровень выходной мощности выходного сигнала, передаваемого от передатчика 52. Процессор 51 сравнивает сигнал обратной связи с сохраненным пороговым значением. Если процессор 51 определяет, что сигнал обратной связи ниже сохраненного порогового значения, процесс 200 продолжается в блоке 210 и начинает другую передачу при более высокой установленной мощности, как описано выше. Если процессор 51 определяет, что сигнал обратной связи больше или равен заданному пороговому значению, процесс 200 завершается.
[0059] Выражение «примерный» используется здесь в смысле обозначения примера, например, упоминание «примерного приспособления» следует понимать просто как упоминание примера приспособления.
[0060] На чертежах одинаковые ссылочные позиции обозначают одинаковые элементы. Кроме того, некоторые или все из этих элементов могут быть изменены. Соответственно должно быть понятно, что приведенное выше описание предназначено для иллюстрации, а не ограничения. Многие варианты выполнения и применения, отличные от приведенных примеров, будут понятны специалисту в данной области техники при прочтении приведенного выше описания. Объем охраны изобретения должен быть определен не путем обращения к приведенному выше описанию, а путем обращения к приложенной формуле изобретения вместе с полным объемом охраны эквивалентов, на которые распространяется такая формула изобретения. Ожидается и предполагается, что в уровне техники, рассмотренном здесь, в будущем будут созданы усовершенствования, и что раскрытые системы и способы будут включены в такие будущие варианты выполнения. В итоге, должно быть понятно, что изобретение может быть модифицировано и изменено, и ограничено только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИЯ ПЕРЕДАЧИ БРЕЛОКА ДЛЯ КЛЮЧЕЙ | 2016 |
|
RU2714799C2 |
| ОПРЕДЕЛЕНИЕ РАСПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702243C2 |
| СИСТЕМА ДОСТУПА И БЕЗОПАСТНОСТИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2014 |
|
RU2673329C2 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТЕЛЕФОНА КАК КЛЮЧА НА ОСНОВЕ ОБНАРУЖЕНИЯ ОБЪЕКТА, СООТВЕТСТВУЮЩИЕ ТРАНСПОРТНОЕ СРЕДСТВО И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2018 |
|
RU2704769C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ОТСЛЕЖИВАНИЯ СОДЕРЖИМОГО ИНВЕНТАРЯ | 2014 |
|
RU2686275C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАХОЖДЕНИЯ РУКИ ПОЛЬЗОВАТЕЛЯ НА РУЛЕВОМ КОЛЕСЕ ТРАНСПОРТНОГО СРЕДСТВА И КОМПЬЮТЕР ДЛЯ ВЫПОЛНЕНИЯ СПОСОБА | 2016 |
|
RU2714657C2 |
| СПОСОБ И УСТРОЙСТВО КОМБИНИРОВАННОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ПЕРЕДАЧИ СИГНАЛОВ РАДИОСООБЩЕНИЙ | 2005 |
|
RU2319211C2 |
| СИСТЕМА ИНВЕНТАРИЗАЦИИ СОДЕРЖИМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2663255C2 |



Предложен способ регулировки выходной мощности брелока. Передают первый выходной сигнал при первой установленной мощности. Принимают посредством механизма обратной связи в брелоке первый сигнал обратной связи, указывающий первый уровень выходной мощности первого выходного сигнала. Сравнивают первый уровень выходной мощности с пороговым уровнем. Передают второй выходной сигнал при второй установленной мощности большей, чем первая установленная мощность, если первый уровень выходной мощности ниже порогового уровня. Предложены также брелоки. Достигается повышение надежности. 3 н. и 17 з.п. ф-лы, 5 ил.
1. Способ регулировки выходной мощности брелока, содержащий этапы, на которых:
передают первый выходной сигнал при первой установленной мощности;
принимают посредством механизма обратной связи в брелоке первый сигнал обратной связи, указывающий первый уровень выходной мощности первого выходного сигнала;
сравнивают первый уровень выходной мощности с пороговым уровнем; и
передают второй выходной сигнал при второй установленной мощности, большей, чем первая установленная мощность, если первый уровень выходной мощности ниже порогового уровня.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
принимают посредством механизма обратной связи второй сигнал обратной связи, указывающий второй уровень выходной мощности второго выходного сигнала;
сравнивают второй уровень выходной мощности с пороговым уровнем;
передают третий выходной сигнал при третьей установленной мощности, большей, чем вторая установленная мощность, если второй уровень выходной мощности ниже порогового уровня.
3. Способ по п. 1, дополнительно содержащий этап, на котором определяют пороговый уровень из калибровочных данных.
4. Способ по п. 1, дополнительно содержащий этап, на котором определяют первую установленную мощность из калибровочных данных.
5. Способ по п. 1, в котором механизм обратной связи включает в себя радиочастотный элемент обнаружения.
6. Способ по п. 1, в котором брелок включает в себя множество приемопередающих антенн, причем множество приемопередающих антенн включают в себя первую приемопередающую антенну и вторую приемопередающую антенну, причем способ дополнительно содержит этапы, на которых:
принимают сигнал обнаружения от датчика;
определяют положение объекта вблизи брелока на основании сигнала обнаружения;
выбирают одну из первой приемопередающей антенны и второй приемопередающей антенны для передачи первого выходного сигнала на основании определения положения руки; и
выбирают другую из первой приемопередающей антенны и второй приемопередающей антенны для передачи по обратной связи первого выходного сигнала в механизм обратной связи.
7. Способ по п. 1, дополнительно содержащий этап, на котором:
передают четвертый выходной сигнал при четвертой установленной мощности, меньшей, чем первая установленная мощность, если первый выходной уровень выше порогового уровня.
8. Способ по п. 1, в котором первую установленную мощность увеличивают на первую величину до второй установленной мощности, причем первая величина основана на эмпирических данных.
9. Способ по п. 1, в котором сравнение первого уровня выходной мощности с пороговым значением включает в себя этапы, на которых вычисляют разность между первым сигналом обратной связи и пороговым уровнем и определяют первую величину на основании по меньшей мере частично вычисленной разности.
10. Брелок, содержащий:
устройство памяти;
передатчик;
механизм обратной связи, запрограммированный с возможностью обеспечения первого сигнала обратной связи; и
процессор, запрограммированный с возможностью передачи первого выходного сигнала при первой установленной мощности, приема первого сигнала обратной связи, указывающего первый уровень выходной мощности первого выходного сигнала, сравнения первого уровня выходной мощности с пороговым уровнем и передачи второго выходного сигнала при второй установленной мощности, если уровень мощности первого сигнала обратной связи ниже порогового уровня, причем вторая установленная мощность больше, чем первая установленная мощность.
11. Брелок по п. 10, в котором процессор дополнительно запрограммирован с возможностью приема второго сигнала обратной связи, указывающего второй уровень мощности второго выходного сигнала, посредством механизма обратной связи, сравнения второго выходного уровня с пороговым уровнем и передачи третьего сигнала при третьей установленной мощности, большей, чем вторая установленная мощность, если второй уровень выходной мощности ниже порогового уровня.
12. Брелок по п. 10, в котором сохраненный пороговый уровень определяется из калибровочных данных.
13. Брелок по п. 10, в котором первая установленная мощность определяется из калибровочных данных.
14. Брелок по п. 10, в котором механизм обратной связи включает в себя радиочастотный элемент обнаружения.
15. Брелок по п. 14, в котором антенна обратной связи представляет собой проводниковую дорожку, удаленную от приемопередающей антенны, включенной в брелок.
16. Брелок по п. 10, дополнительно содержащий:
множество приемопередающих антенн, причем множество приемопередающих антенн включает в себя первую приемопередающую антенну и вторую приемопередающую антенну; и
по меньшей мере один датчик; причем процессор дополнительно запрограммирован с возможностью:
приема сигнала обнаружения от по меньшей мере одного датчика,
определения положения объекта вблизи брелока на основании сигнала обнаружения,
выбора одной из первой приемопередающей антенны и второй приемопередающей антенны для передачи первого выходного сигнала на основании определенного положения объекта; и
выбора другой из первой приемопередающей антенны и второй приемопередающей антенны для передачи по обратной связи первого выходного сигнала в механизм обратной связи.
17. Брелок по п. 10, в котором процессор дополнительно запрограммирован с возможностью передачи четвертого выходного сигнала при четвертой установленной мощности, меньшей, чем первая установленная мощность, если первый уровень выходной мощности больше порогового уровня.
18. Брелок по п. 10, в котором первая установленная мощность увеличивается на первую величину до второй установленной мощности, причем первая величина основана на эмпирических данных.
19. Брелок по п. 10, в котором сравнение первого уровня выходной мощности с пороговым значением включает в себя вычисление разности между первым сигналом обратной связи и пороговым уровнем и определение первой величины на основании по меньшей мере частично вычисленной разности.
20. Брелок, содержащий:
устройство памяти;
передатчик;
множество приемопередающих антенн, включающее в себя первую приемопередающую антенну и вторую приемопередающую антенну;
механизм обратной связи, запрограммированный с возможностью обеспечения первого сигнала обратной связи; и
процессор, запрограммированный с возможностью передачи первого выходного сигнала при первой установленной мощности, приема первого сигнала обратной связи, указывающего первый уровень выходной мощности первого выходного сигнала, сравнения первого уровня выходной мощности с пороговым уровнем и регулировки настройки между первой приемопередающей антенной и второй приемопередающей антенной, если уровень мощности первого сигнала обратной связи ниже порогового уровня.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

