ОБЛАСТЬ ТЕХНИКИ
Это раскрытие относится к проверке датчиков контроля состояния водителя.
УРОВЕНЬ ТЕХНИКИ
Использование датчиков контроля состояния водителя в транспортных средствах продолжает увеличиваться. При вождении, водители сосредотачивают свое внимание на дороге и на различных зеркалах, устройствах отображения и элементах управления внутри транспортного средства. Датчики контроля состояния водителя используются в транспортных средствах для определения направления взгляда водителя. Однако, часто эти датчики технического зрения для контроля состояния водителя не проверяются и не оцениваются полностью перед установкой, что может приводить к выдаче датчиками ошибочных данных во время эксплуатации транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагается система проверки датчика, содержащая: контроллер, присоединенный к по меньшей мере одному устройству проверки и датчику, контроллер выполнен с возможностью: принимать инструкции проверки, включающие в себя множество проверочных последовательностей; инструктировать по меньшей мере один блок отображения отображать предмет на основании проверочной последовательности; принимать данные ответа из устройства проверки, указывающие поведение водителя, данные ответа включают в себя информацию о временных характеристиках и информацию об устройстве проверки; компилировать данные ответа на основании информации о временных характеристиках и информации об устройстве проверки; принимать данные с датчика, полученные датчиком во время проверочной последовательности; сравнивать компилированные данные ответа с данными с датчика; и определять точность датчика на основании сравнения. Причем данные ответа включают в себя по меньшей мере одно первое положение головы и первое направление взгляда. Причем первое положение головы и первое направление взгляда данных ответа сравниваются со вторым положением головы и вторым направлением взгляда данных с датчика. Причем контроллер дополнительно выполнен с возможностью инструктировать громкоговоритель издавать звуковые инструкции, указывающие требуемое поведение водителя, на основании инструкций проверки. Причем данные ответа включают в себя звуковую последовательность, полученную на микрофоне, и информацию о временных характеристиках, полученную из устройства измерения времени. Причем датчик является датчиком технического зрения.
Также предлагается система транспортного средства, содержащая: контроллер, присоединенный к по меньшей мере одному устройству проверки и датчику, контроллер выполнен с возможностью: инструктировать по меньшей мере один блок отображения отображать предмет; принимать данные ответа, указывающие поведение водителя, из устройства проверки и сравнивать данные ответа с данными с датчика, предоставленными датчиком; и определять точность датчика на основании сравнения. Причем данные ответа включают в себя по меньшей мере одно первое положение головы и первое направление взгляда. Причем первое положение головы и первое направление взгляда данных ответа сравниваются со вторым положением головы и вторым направлением взгляда данных с датчика. Причем данные ответа включают в себя эталонные данные, принятые из эталонного устройства, и включают в себя по меньшей мере одно из слышимого ответа, данных временных характеристик и данных изображений. Причем эталонное устройство включает в себя по меньшей мере одно из камеры транспортного средства, микрофона и устройства измерения времени. Причем контроллер дополнительно выполнен с возможностью инструктировать громкоговоритель издавать звуковые инструкции, указывающие требуемое поведение водителя. Причем по меньшей мере один блок отображения включает в себя множество блоков отображения, скомпонованных в кабине транспортного средства. Причем контроллер выполнен с возможностью инструктировать один из блоков отображения подсвечиваться в течение предопределенного времени. Причем контроллер дополнительно выполнен с возможностью инструктировать один из блоков отображения отображать случайно сформированное изображение. Причем данные ответа включают в себя по меньшей мере один слышимый ответ, принятый на микрофоне, указывающий случайно сформированное изображение. Причем контроллер дополнительно выполнен с возможностью принимать информацию о временных характеристиках из устройства измерения времени.
Также предлагается система проверки датчика транспортного средства, содержащая: контроллер, присоединенный к первому датчику и второму датчику, каждый выполнен с возможностью выявлять поведение водителя, контроллер выполнен с возможностью сравнивать первые данные с первого датчика со вторыми данными со второго датчика и определять точность второго датчика на основании сравнения. Причём контроллер дополнительно выполнен с возможностью определять точность второго датчика на основании дополнительных эталонных данных, принятых из эталонных устройств, в том числе, по меньшей мере одного из камеры, устройства измерения времени и микрофона. Причем эталонные данные включают в себя по меньшей мере одни из данных изображений, данных временных характеристик и звуковых данных.
Система проверки датчика может включать в себя контроллер, присоединенный к по меньшей мере одному устройству проверки и датчику, контроллер выполнен с возможностью принимать инструкции проверки, включающие в себя множество проверочных последовательностей, инструктировать по меньшей мере один блок отображения отображать предмет на основании проверочной последовательности, принимать данные ответа из устройства проверки, указывающие поведение водителя, данные ответа включают в себя информацию о временных характеристиках и информацию об устройстве проверки, компилировать данные ответа на основании информации о временных характеристиках и информации об устройстве проверки, принимать данные с датчика, полученные датчиком во время проверочной последовательности, сравнивать компилированные данные ответа с данными с датчика, и определять точность датчика на основании сравнения.
Система транспортного средства может включать в себя контроллер, присоединенный к по меньшей мере одному устройству проверки и датчику, контроллер выполнен с возможностью инструктировать по меньшей мере один блок отображения отображать предмет, принимать данные ответа, указывающие поведение водителя, из устройства проверки и сравнивать данные ответа с данными с датчика, предоставленными датчиком, и определять точность датчика на основании сравнения.
Система проверки датчика транспортного средства может включать в себя контроллер, присоединенный к первому датчику и второму датчику, каждый выполнен с возможностью выявлять поведение водителя, контроллер выполнен с возможностью сравнивать первые данные с первого датчика с вторыми данными со второго датчика и определять точность второго датчика на основании сравнения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления настоящего раскрытия подробно показаны в прилагаемой формуле изобретения. Однако, другие признаки различных вариантов осуществления станут очевиднее и будут лучше понятны посредством обращения к последующему подробному описанию вместе с сопроводительными чертежами, на которых:
фиг. 1 иллюстрирует примерную систему проверки датчиков для датчика технического зрения для контроля состояния водителя;
фиг. 2 иллюстрирует примерный вид системы проверки транспортного средства по фиг. 1; и
фиг. 3A и 3B иллюстрируют примерную последовательность операций для системы проверки.
ПОДРОБНОЕ ОПИСАНИЕ
Как требуется, в материалах настоящей заявки раскрыты детализированные варианты осуществления настоящего изобретения; однако, должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно должны определять масштаб; некоторые признаки могут быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
В материалах настоящей заявки описана система проверки для датчиков технического зрения для контроля состояния водителя, которые обычно используются в транспортных средствах, чтобы выявлять, куда смотрит водитель. Так как системы транспортного средства используют данные, выдаваемые такими датчиками с возрастающей частотой, важно иметь надежные и точные датчики, установленные в транспортном средстве. Перед установкой датчика, выгодно проверять датчик, для того чтобы избежать проблем после установки, которые могут стать дорогостоящими и трудоемкими. Система в материалах настоящей заявки включает в себя многочисленные устройства отображения в пределах проверяемого транспортного средства, скомпонованные в местах, куда водитель типично может смотреть при вождении автомобиля (например, приборную панель на ветровом стекле, зеркало заднего вида, и т. д.). Пользователь, или проверяемый водитель, может сидеть на водительском сиденье. Голова водителя может наблюдаться во время проверки, при этом, водитель может переводить его или ее голову/глаза с одного устройства отображения на другое. Центральный контроллер может инструктировать устройства отображения подсвечиваться или отображать определенные объекты, такие как цифры или буквы. Контроллер также может инструктировать определенными звуковыми командами, чтобы помогать облегчать проверку. Во время проверки, положение головы, в числе других атрибутов водителя, может записываться с использованием различных устройств проверки, таких как датчик(и) прямого наблюдения и/или эталонная камера(ы). Управляемый водителем таймер или устройство 150 измерения времени также может использоваться для указания, насколько долго водитель смотрел на определенное устройство отображения. Данные, собранные этими различными устройствами, могут использоваться и сравниваться с данными, собранными датчиком технического зрения для контроля состояния водителя в проверяемом транспортном средстве. На основании этого сравнения, датчик технического зрения для контроля состояния водителя может оцениваться на свою точность. Так как стандартная проверка несколькими последовательностями управляется и находится под командованием контроллера, датчики технического зрения для контроля состояния водителя могут без труда заменяться и проверяться в быстром темпе, таким образом, повышая достоверность данных с датчика технического зрения для контроля состояния водителя по всем транспортным средствам.
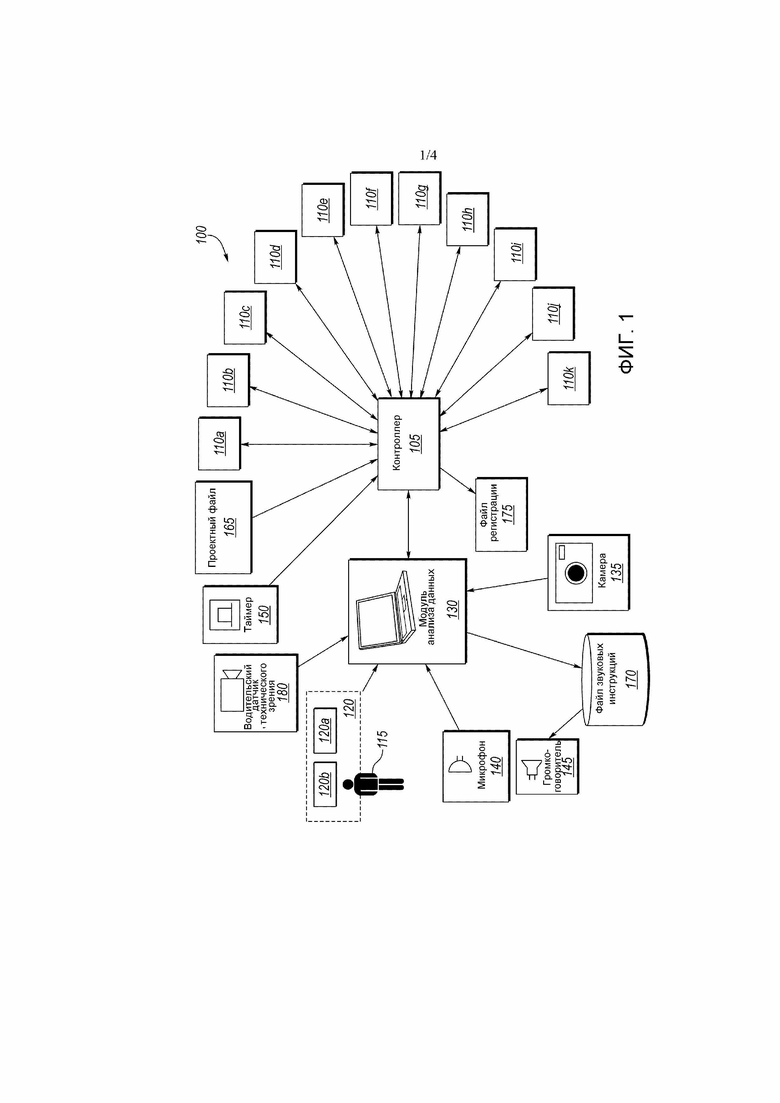
Фиг. 1 иллюстрирует примерную систему 100 проверки датчиков для системы технического зрения для контроля транспортного средства, содержащую контроллер 105, имеющий память, и процессор, запрограммированный передавать инструкции во множество блоков 110 отображения (как показанные в качестве блоков 110a-110k отображения). Блоки 110 отображения могут быть любым одним из или комбинацией визуальных устройств отображения, таких как светоизлучающие диоды (СИД, LED), органические СИД (OLED), органический светоизлучающий диод с активной матрицей (AMOLED), жидкокристаллические дисплеи (LCD), тонкопленочные диоды (TFD), электронно-лучевые трубки (ЭЛТ, CRT), плазменное устройство отображения, емкостной или резистивный сенсорный экран, и т.д. Блоки 110 отображения могут инструктироваться отображать предметы, цифры, объекты, буквы, и т.д., пользователю 115 в транспортном средстве, для того чтобы направлять внимание пользователя на конкретный блок 110. Контроллер 105 может проверять датчик 180 технического зрения для контроля состояния водителя, выдавая множество проверочных последовательностей в блоки 110 отображения. Каждая проверочная последовательность может включать в себя специфичные инструкции для одного или обоих из звуковой команды и визуального указания на одном из блоков отображения. Например, первая последовательность может отображать букву на блоке 110a отображения. Вторая последовательность может отображать цифру на блоке 110b отображения. Что касается каждой последовательности, пользователь 115 может смотреть на подсвеченный блок 110 отображения. Как описано в материалах настоящей заявки, различные устройства используются для сбора данных касательно зрительного направления пользователя в течение последовательности. Данные затем могут использоваться контроллером 105 для оценивания точности датчика 180 технического зрения для контроля состояния пользователя. Эти устройства и последовательности операций проверки подробнее описаны в материалах настоящей заявки.
Контроллер 105 может быть на связи с датчиком 120 прямого наблюдения. Датчик 120 прямого наблюдения может быть датчиком положения, размещенным в транспортном средстве для выявления положения и обнаружения головы пользователя. Датчик 120 прямого наблюдения может быть способен выявлять положение и направление головы пользователя 115 посредством формирования изображений, такого как формирование видеоизображений многочисленными датчиками технического зрения. В одном из примеров, датчик 120 прямого наблюдения может быть электромагнитной следящей системой, такой как беспроводная следящая система PATRIOT™, поставляемая Polhemus Company™, Колчестер, штат Вермонт, 05446. Любая другая пригодная система контроля положения и направления головы, которая может контролировать положение и направление головы водителя, может использоваться в качестве системы прямого наблюдения. Датчик 120 прямого наблюдения может быть выполнен с возможностью передавать первые данные водителя обратно в модуль 130 анализа данных, описанный в материалах настоящей заявки. Датчик 120 прямого наблюдения может включать в себя пару датчиков, таких как первый датчик 120a и второй датчик 120b. Первый датчик 120a может быть базовым датчиком, установленным в транспортном средстве возле головы пользователя, а второй датчик 120a может быть движущимся датчиком, прикрепленным к голове пользователя с помощью шляпы или ободка. Вместе, первый и второй датчики 120a, 120b могут выдавать количественные данные прямого наблюдения, такие как поперечный наклон, продольный наклон и курсовое отклонение (RPY) поворота головы, а также координаты X, Y, Z положения головы.
По меньшей мере одна камера 135 может находиться на связи с контроллером 105 и быть выполненной с возможностью подавать данные изображений в модуль 130 анализа данных. Такие данные изображений могут указывать определенные движения головой, произведенные пользователем 115, и могут использоваться модулем 130 анализа данных при оценивании датчика 180 технического зрения для контроля состояния водителя. Камера 135 может быть камерой, способной снимать видео и выявлять движение головы и глаз пользователя. Камера 135 может включать в себя многочисленные камеры, а данные изображений могут использоваться модулем 130 анализа данных для качественного анализа. Например, данные изображений могут использоваться для определения, смотрит ли пользователь в правильное место, и следует ли пользователь инструкциям. Дополнительно или в качестве альтернативы, данные изображений также могут подавать информацию о временных характеристиках, так как она относится к движению головы пользователя, описанному ниже.
Контроллер 105 может находиться на связи с модулем 130 анализа данных. Модуль 130 анализа данных может включать в себя процессор и контроллер, запрограммированные принимать и передавать данные в контроллер 105. Несмотря на то, что фиг. 1 показывает модуль 130 анализа данных и контроллер 105 данных в качестве отдельных устройств, каждый может выполнять функции другого с единым объединенным контроллером в некоторых вариантах осуществления. Более того, несмотря на то, что устройство сбора данных показано в качестве находящегося на связи с микрофоном 140 и громкоговорителем 145, а контроллер 105 показан в качестве находящегося на связи с таймером 150 пользователя, каждый может быть на связи с одним или более из микрофона 140, громкоговорителя 145 и таймера 150. Более того, контроллер в модуле 130 анализа данных может выполнять любую или все функции, в качестве выполняющего которые описан контроллер 105.
Микрофон 140 может быть установленным в транспортном средстве микрофоном, выполненным с возможностью принимать слышимый ответ от пользователя 115. Громкоговоритель 145 может быть установленным в транспортном средстве громкоговорителем, выполненным с возможностью вслух передавать команды водителю 115. Таймер 150 пользователя может быть таймером, выполненным с возможностью отслеживать время определенных событий на основании обратной связи пользователя. Например, пользователь 115 может нажимать кнопку на таймере 150, указывая начало события. Пользователь 115 также может нажимать кнопку, указывая окончание события. Эти информация/данные временных характеристик могут передаваться в контроллер 105.
Система 100 также может полагаться на различные файлы и инструкции проверки для реализации процедур проверки. Как показано на фиг. 1, проектный файл последовательности может подвергаться доступу контроллером 105. Контроллер 105 может быть запрограммирован инструктировать блоки 110 отображения отображать определенные предметы в определенной последовательности на основании проектного файла 165. Последовательность может включать в себя определенные последовательности включения/выключения для блоков 110 отображения.
Файл 170 слышимых инструкций может привлекаться модулем 130 анализа данных или контроллером 105, и контроллер 105 может быть запрограммирован инструктировать громкоговоритель 145 воспроизводить определенные звуковые команды на основании файла 170 звуковых инструкций. Например, команды могут включать в себя фразы, такие как «Какая цифра видна на устройстве отображения номер четыре?». На эти команды, пользователь 115 может отвечать вслух, что может приниматься и передаваться в контроллер 105 микрофоном 140.
Файл 175 регистрации может привлекаться контроллером 105 для поддержания всех команд и ответов. Более точно, файл 175 регистрации может каталогизировать ответы по данным контроллера, в том числе, данным из таймера 150, микрофона 140, и прочих. Ответы могут ассоциативно связываться с определенной последовательностью на основании временных характеристик такой последовательности и/или ожидаемого ответа. Например, если первый блок 110a отображения подсвечивается в ответ на инструкции, основанные на первой последовательности, поставляемые проектным файлом 165, файл 175 регистрации может сохранять любые ответы, принятые в течение определенного периода времени подсветки. Хранимые ответы могут быть ассоциативно связаны с первой последовательностью в пределах файла 175 регистрации и могут включать в себя данные, принятые из по меньшей мере одного из источников данных, в том числе, ручного таймера 150, микрофона 140 и прочих, относящиеся к временным характеристикам последовательностей включения/выключения для блоков 110 отображения. Файл 175 регистрации также может поддерживать, какое случайно сформированное изображение (например, цифры/буквы) отображаются и когда, для более позднего соотнесения с точностью ответа водителя на эти отображения.
Датчик 180 технического зрения для контроля состояния водителя может быть включен в систему 100 и может оцениваться контроллером 105. Как пояснено, датчик 180 технического зрения для контроля состояния водителя может быть датчиком, который будет в итоге установлен в транспортное средство для использования конечным потребителем. Датчик 180 технического зрения для контроля состояния водителя может без труда сниматься и устанавливаться, так чтобы многочисленные датчики для контроля состояния водителя могли проверяться с использованием системы 100 для усовершенствования.
Фиг. 2 иллюстрирует примерный вид кабины транспортного средства системы 100 проверки. Блоки 110 отображения могут быть скомпонованы по всей кабине транспортного средства в местах, которые типично обозреваются водителем. Например, блоки 110 отображения могут включать в себя блок 110a окна водительской стороны, блок 110b зеркала водительской стороны, блок 110c взгляда вперед, блок 110d приборной панели на ветровом стекле (HUD), блок 110e приборного щитка, блок 110f рулевого колеса, коленный блок 110g, блок 110h зеркала заднего вида, центральный блок 110i отображения, блок 110j зеркала пассажирской стороны, блок 110k окна пассажирской стороны, среди прочих. Хотя не показано, другие места также могут включать в себя блоки 110 отображения. Система 100 проверки датчиков может использовать блоки 110 отображения для инструктирования пользователя 115, куда должны быть направлены его или ее глаза и голова. Например, если подсвечивается центральный блок 110k отображения, пользователь 115 может смотреть на такой блок. Посредством управления поведением пользователя/водителя (например, положением головы и направлением взгляда), система 100 проверки может выполнять управляемый анализ датчика 180 технического зрения для контроля состояния водителя.
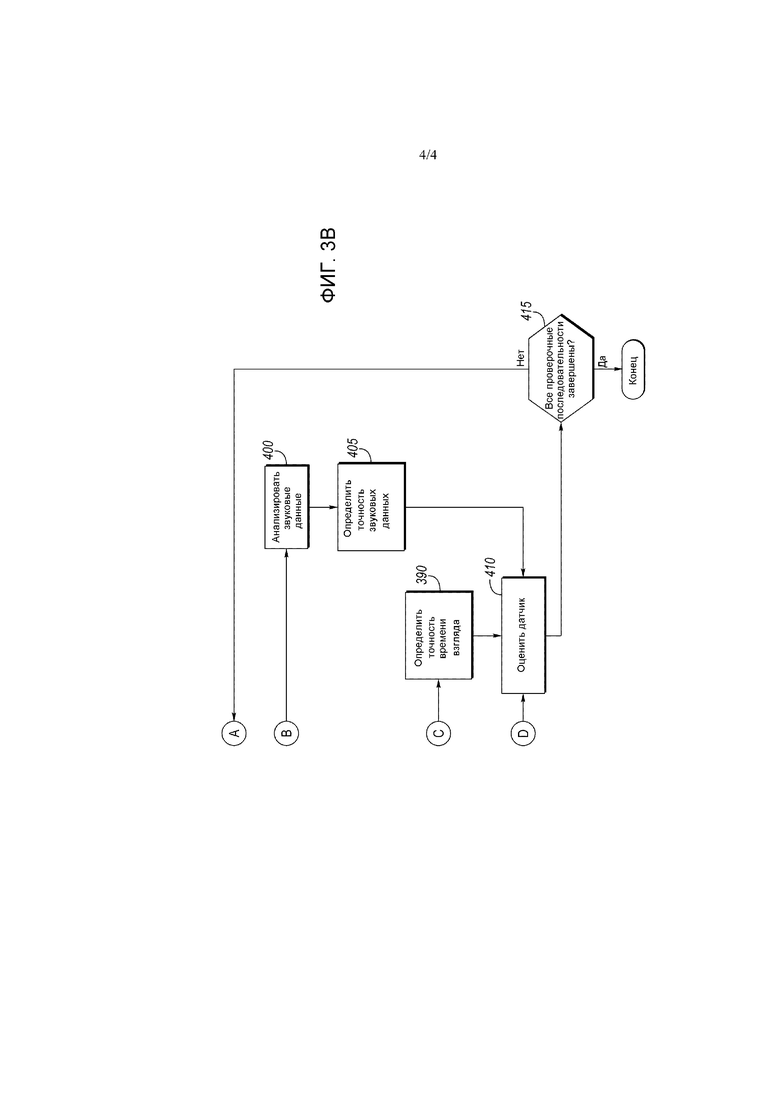
Фиг. 3A и 3B иллюстрируют примерную последовательность 300 операций для проверки точности датчика 180 технического зрения для контроля состояния водителя на основании данных, принятых от пользователя 115 (например, с микрофона 140 и таймера 150), а также датчиков 120a, 120b прямого наблюдения и камеры 135.
Последовательность 300 операций начинается на вершине 302 блок-схемы выбором сценария проверки из проектного файла 165. На вершине 305 блок-схемы, контроллер 105 определяет, должны ли быть выполнены настройки визуального вывода для блоков 110 отображения. Например, пользователь 115 может выбирать разные размеры и цвета СИД. Настройки для блоков 110 отображения могут производиться в попытке управлять величиной внимательности, требуемой водителем при осуществлении взгляда на конкретный блок 110 отображения. Например, блок 110 отображения, состоящий из СИД, может использовать цвета с недостаточным контрастом или низкой интенсивностью, чтобы притягивать полное внимание водителя к такому блоку 110 отображения, отчасти так как пользователю будет требоваться фокусироваться в большей степени в попытке рассмотреть блок 110 отображения. В противоположность, большее количество СИД в блоке 110 отображения с контрастирующими цветами может использоваться, чтобы давать возможность быстрых взглядов на блок 110. Настройки также могут производиться в отношении звуковых инструкций. Такие настройки могут зависеть от расположения блока 110 отображения. Например, некоторые блоки отображения могут находиться в непосредственной близости с пользователем 115 наряду с тем, что другие находятся дальше, требуя больших СИД.
На вершине 310 блок-схемы, контроллер 105 инструктирует блоки 110 отображения настраивать визуальные выходные сигналы. Например, размер одного или более визуальных выходных сигналов может изменяться на блоках 110 отображения в зависимости от их расположения.
На вершине 315 блок-схемы, последовательность 300 операций переходит к инициированию сеанса проверки, который может включать в себя многочисленные проверочные последовательности. Для каждой последовательности, могут выполняться последовательности операций на одной или более из вершин 320-355 блок-схемы.
На вершине 320 блок-схемы, контроллер 105 может принимать файл последовательности, связанный со сценарием, выбранным на вершине 302 блок-схемы из проектного файла 165. Файлы последовательности могут включать в себя по меньшей мере одну инструкцию, диктующую последовательность событий, такую как, какие блоки 110 отображения должны отображать предметы и в каком порядке. В одном из примеров, файл последовательности может указывать, что блок 110a окна водительской стороны должен отображать случайную цифру. В еще одном примере, еще один блок может отображать форму или просто подсвечиваться. Предметы, отображаемые блоками 110 отображения, могут формироваться с использованием СИД или других механизмов отображения в зависимости от типа устройства отображения. Другие примерные инструкции могут включать в себя отображение случайно сформированной цифры, отображение специфичного цвета предмета, и т. д. Контроллер 105 может инструктировать по меньшей мере один из блоков 110 отображения отображать предмет, как указано последовательностью.
На вершине 330 блок-схемы, контроллер 105 может принимать звуковой ответ от пользователя 115 через микрофон 140. Контроллер 105 может включать в себя систему распознавания речи и может быть выполнен с возможностью преобразовывать звуковой ответ в цифровой формат, который может сохраняться в файле(ах) 175 регистрации, как пояснено ниже со ссылкой на вершину 400 блок-схемы. Звуковой ответ может включать в себя любое количество ответов, сообщаемых вслух пользователем 115. В одном из примеров, пользователь 115 может сообщать вслух, что пользователь 115 смотрит на блок 110 отображения. Например, если отображается случайно сформированная буква, пользователь 115 может читать вслух такую букву. Дополнительно, пользователь 115 может указывать, какие из блоков 110 отображения отображали предмет. Как показано на фиг. 1, звуковой ответ может передаваться в устройство сбора данных. Дополнительно или в качестве альтернативы, контроллер 105 может принимать звуковой ответ непосредственно.
На вершине 335 блок-схемы, контроллер 105 может принимать информацию/данные временных характеристик из таймера 150. Информация о временных характеристиках может указывать, насколько долго пользователь фактически смотрел на соответственный блок 110 отображения. Как пояснено выше, таймер 150 может приводиться в действие рукой пользователя.
На вершине 340 блок-схемы, контроллер 105 может принимать данные изображений с камеры 135, указывающие движение и/или положение головы.
На вершине 345 блок-схемы, модуль 130 анализа данных может принимать данные прямого наблюдения с датчиков 120a, 120b прямого наблюдения. Как пояснено выше, информация прямого наблюдения может включать в себя движение головы водителя и/или направление взгляда водителя, полученные с помощью электромагнитной следящей системы и/или другой системы технического зрения высокой точности и высокого разрешения.
На вершине 350 блок-схемы, модуль 130 анализа данных может принимать вторые данные, или данные с датчика, с датчика 180 технического зрения для контроля состояния водителя. Вторые данные могут включать в себя вторые данные, подобные данным, полученным с датчика 120 прямого наблюдения, в том числе, второе положение головы и второе направление взгляда.
На вершине 355 блок-схемы, контроллер 105 может инструктировать 145 громкоговоритель 145 издавать определенные команды. Эти команды могут включать в себя инструкции для пользователя 115, такие как «Пожалуйста, идентифицируйте цифру, показанную на блоке отображения номер 10».
На вершине 370 блок-схемы, контроллер 105 может определять, завершен ли сеанс проверки. Например, контроллер 105 может определять, были ли выполнены все из последовательностей. Если так, последовательность 300 операций переходит на вершину 375 блок-схемы. Если нет, последовательность 300 операций возвращается на вершину 315 блок-схемы.
На вершине 375 блок-схемы, последовательность 300 операций переходит к оценке сеанса проверки, который может включать в себя многочисленные проверочные последовательности. Для каждой последовательности, могут выполняться последовательности операций на одной или более из вершин 380-410 блок-схемы.
На вершине 380 блок-схемы, контроллер 105 может компилировать все из данных в файле 175 регистрации для датчика 120 прямого наблюдения и датчика 180 технического зрения для контроля состояния водителя. Компиляция этих данных может включать в себя категоризацию данных на основании метки времени, ассоциативно связанной с каждым фрагментом данных. Эта компиляция предоставляет данным возможность организовываться согласно соответственной последовательности, в течение которой они собирались. Компиляция также будет предоставлять датчику 180 технического зрения для контроля состояния водителя возможность оцениваться лучше, как описано ниже. Например, метка времени, ассоциативно связанная с каждой точкой данных, также может использоваться для оценивания, работает ли датчик 180 технического зрения для контроля состояния водителя как ожидается, когда сравниваются с другими данными (например, информацией о временных характеристиках, подаваемой пользователем 115).
На вершине 385 блок-схемы, контроллер 105 может определять (или оценивать) точное время направления взгляда водителя (в том числе, время начала/окончания) каждого быстрого взгляда, выдаваемое таймером 150. Это время направления взгляда водителя может настраиваться на основании данных изображений, подаваемых камерой 135. Например, данные изображений (с помощью движения головы) могут указывать, что пользователь 115 начал смотреть на блок 110a отображения в t+0,75 секунд и отвел взгляд (например, посмотрел в другое место) в t+2,45 секунд. Таймер 150, приведенный в действие пользователем 115, может указывать, что пользователь 115 фиксировал таймер в t+0,78 секунд и в t+2,50 секунд. Таким образом, данные изображений могут использоваться для внесения поправки в данные таймера в случае, если неточности (например, ошибки оператора) были выявлены в данных таймера. Время направления взгляда водителя указывает, насколько долго пользователь смотрел на специфичный блок 110 отображения.
В одном из вариантов осуществления, на вершине 390 блок-схемы, контроллер 105 может определять, существует ли неточность между информацией о временных характеристиках и данных изображений, что касается указанных времен направления взгляда водителя. Например, если существуют большие неточности (например, несовпадение времени, превышающее предопределенное пороговое значение) между временем направления взгляда водителя в качестве определенных данными изображений и информацией о временных характеристиках, которая выдается таймером 150, информация о временных характеристиках может отбрасываться и/или откладываться для дополнительного анализа.
На вершине 395 блок-схемы, вторые данные с датчика 180 технического зрения для контроля состояния водителя будут сравниваться с первыми данными датчика 120 прямого наблюдения. Например, данные прямого наблюдения (например, информация о движении головы), подаваемые датчиком 120 прямого наблюдения, могут сравниваться с второй информацией о датчике технического зрения для контроля состояния водителя (например, вторым положением головы и вторым направлением взгляда), выдаваемой датчиком 180 технического зрения для контроля состояния водителя. Как только сравниваются, данные могут использоваться для создания углового выходного сигнала, относящегося к положению головы, для каждой последовательности. Например, угловой выходной сигнал головы пользователя может определяться, когда пользователь 115 смотрел на блок 110a отображения. Еще один угловой выходной сигнал может определяться, когда пользователь 115 смотрел на блок 110b отображения, и так далее.
На вершине 400 блок-схемы, контроллер 105 может анализировать данные звукового ответа, принятые через микрофон 140, в попытке извлечь устные ответы, записанные пользователем 115. Например, эти ответы могут включать в себя устно изложенные цифры или буквы. Контроллер 105 может выключать в себя программное обеспечение распознавания звуков, способное преобразовывать данные звукового ответа в цифровое представление такового и ассоциативно связывать «цифру» с меткой времени того, когда они били приняты.
На вершине 405 блок-схемы, контроллер 105 может сравнивать принятые данные звукового ответа с ожидаемым ответом, принятым из файла 170 звуковых инструкций, файла 175 регистрации и/или проектного файла 165. Как пояснено, проектный файл 165 может выдавать инструкции, чтобы специфичная последовательность отображала случайную цифру на определенном блоке 110 отображения. С каждой случайно сформированной цифрой, файл 175 регистрации может каталогизировать или сохранять цифру с меткой времени, таким образом, ассоциативно связывая цифру с последовательностью, работающей в то время. Контроллер 105 может сравнивать букву или цифру, изложенные устно пользователем 115, с сохраненной буквой, чтобы определять, что цифры и/или буквы совпадают. Это сравнение может использоваться контроллером 105 для оценивания датчика 180 технического зрения для контроля состояния водителя, но также может использоваться для простого указания, уделял ли пользователь 115 внимание намеченному блоку 110 отображения во время проверки. Оно также может использоваться для дополнительного вовлечения пользователя 115 во время проверки, чтобы поддерживать интерес пользователя, так чтобы могло достигаться активное участие.
На вершине 410 блок-схемы, модуль 130 анализа данных может оценивать датчик 180 технического зрения для контроля состояния водителя на основании определений и сравнений, произведенных на вершинах 380-405 блок-схемы. То есть, данные, сформированные датчиком 180 технического зрения для контроля состояния водителя, могут сравниваться с данными из системы 120 прямого наблюдения, а также эталонными данными из эталонных устройств, в том числе, камеры 135, микрофона 140 и таймера 150. Например, датчик 180 технического зрения для контроля состояния водителя может снабжать модуль анализа данных данными датчика технического зрения для контроля состояния водителя, которые включают в себя направление и время взгляда водителя. Время направления взгляда водителя из датчика 180 для контроля состояния водителя могут сравниваться с определенным временем направления взгляда водителя (как определено на вершинах 385 и 390 блок-схемы) наряду с тем, что направление взгляда водителя с датчика 180 технического зрения для контроля состояния водителя может сравниваться с угловым выходным сигналом, как определено на вершине 395 блок-схемы. Точность звуковых данных на вершине 405 блок-схемы предусматривает дополнительный фильтр на сравнении для устранения результатов, содержащих в себе очевидные ошибки оператора. Например, продолжающееся несоответствие между сообщенными пользователем цифрой/буквой и показанными на блоке отображения может указывать плохие данные, которые должны быть отброшены. Степень, с которой данные с датчика технического зрения для контроля состояния водителя соответствуют таковым по определенным времени взгляда водителя и угловому выходному сигналу, будет оцениваться в баллах с использованием статистических моделей, затем, датчик 180 технического зрения для контроля состояния водителя может оцениваться модулем анализа данных на основании балльных оценок для всех сеансов проверки. С использованием описанной последовательности операций, балльные оценки для разных датчиков 180 технического зрения для контроля состояния водителя являются более однородными, давая возможность сравнения между разными изделиями.
На вершине 415 блок-схемы, модуль 130 анализа данных может определять, была ли оценена каждая последовательность. Если так, последовательность 300 операций заканчивается. Если нет, последовательность 300 операций возвращается на вершину 375 блок-схемы. Соответственно, описана система проверки, посредством которой может определяться точность и пригодность к эксплуатации датчика 180 технического зрения для контроля состояния водителя. Система проверки может получать данные из многочисленных источников, отличных от датчика 180 технического зрения для контроля состояния водителя. Данные затем могут соотноситься, чтобы давать данные, указывающие расположение или направление пристального взгляда водителя и время. Эти соотнесенные данные затем могут сравниваться с данными, предоставленными датчиком 180 технического зрения для контроля состояния водителя. Посредством сравнения данных, контроллер может определять точность датчика 180 технического зрения для контроля состояния водителя.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы раскрытия. Скорее, словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема раскрытия. Дополнительно, признаки различных вариантов осуществления реализации могут комбинироваться для формирования дополнительных вариантов осуществления, не описанных и не проиллюстрированных конкретно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОГО ИНТЕРФЕЙСА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2682102C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ ОБЪЕКТЕ В ТРАНСПОРТНОМ СРЕДСТВЕ (ВАРИАНТЫ) | 2016 |
|
RU2706888C2 |
| СПОСОБ И СИСТЕМА ПРЕДОСТАВЛЕНИЯ ОТЧЕТА ПОСЛЕ ВОЖДЕНИЯ С ОБУЧЕНИЕМ | 2015 |
|
RU2679939C1 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ОТСЛЕЖИВАНИЯ СОДЕРЖИМОГО ИНВЕНТАРЯ | 2014 |
|
RU2686275C2 |
| СИСТЕМА ИНВЕНТАРИЗАЦИИ СОДЕРЖИМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2663255C2 |
| КОНФИГУРИРУЕМАЯ ПОЛЬЗОВАТЕЛЕМ СИСТЕМА ПРЕДУПРЕЖДЕНИЙ О ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2703410C2 |
| НАВИГАЦИЯ, ОСНОВАННАЯ НА БДИТЕЛЬНОСТИ ВОДИТЕЛЯ ИЛИ ПАССАЖИРА | 2017 |
|
RU2682956C2 |
| МОБИЛЬНОЕ ОБНАРУЖЕНИЕ ОРУЖЕЙНОГО ВЫСТРЕЛА | 2014 |
|
RU2679338C2 |
| СИСТЕМА И СПОСОБ ПРИВЛЕЧЕНИЯ ВНИМАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2711094C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |


Изобретение относится к проверке датчиков контроля состояния водителя. Система проверки датчика транспортного средства содержит контроллер, выполнен с возможностью принимать инструкции проверки, включающие в себя множество проверочных последовательностей, инструктировать по меньшей мере один блок отображения отображать предмет на основании проверочной последовательности, принимать данные ответа из устройства проверки. Причем данные ответа включают в себя информацию о временных характеристиках и информацию об устройстве проверки и первое положение головы и первое направление взгляда. Контроллер также имеет возможность компилировать данные ответа на основании информации о временных характеристиках и информации об устройстве проверки, принимать данные с датчика, сравнивать компилированные данные ответа с данными с датчика и определять точность датчика на основании сравнения. Достигается преждевременная оценка датчиков контроля состояния водителей. 3 н. и 13 з.п. ф-лы, 4 ил.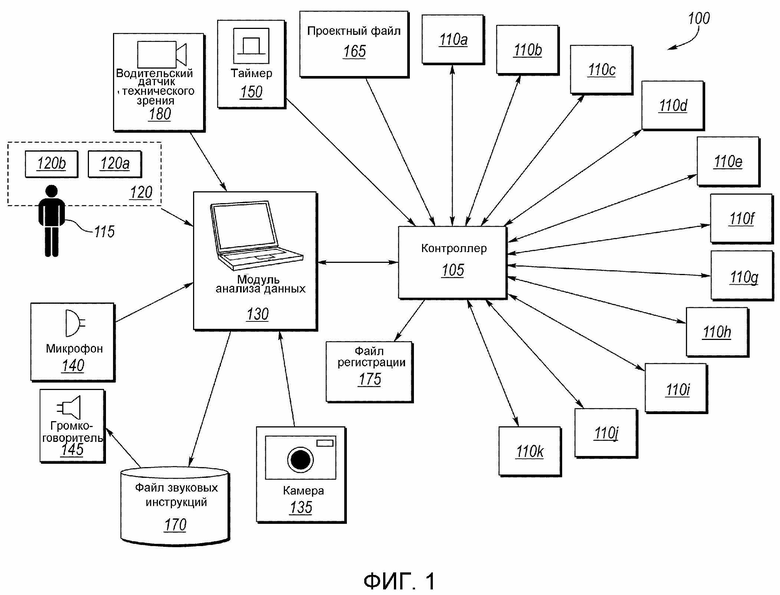
1. Система проверки датчика транспортного средства, содержащая:
контроллер, присоединенный к по меньшей мере одному устройству проверки и датчику, причем контроллер выполнен с возможностью:
принимать инструкции проверки, включающие в себя множество проверочных последовательностей;
инструктировать по меньшей мере один блок отображения отображать предмет на основании проверочной последовательности;
принимать данные ответа из устройства проверки, указывающие поведение водителя, причем данные ответа включают в себя информацию о временных характеристиках и информацию об устройстве проверки, и по меньшей мере одно первое положение головы и первое направление взгляда;
компилировать данные ответа на основании информации о временных характеристиках и информации об устройстве проверки;
принимать данные с датчика, полученные датчиком во время проверочных последовательностей;
сравнивать компилированные данные ответа с данными с датчика, причем первое положение головы и первое направление взгляда данных ответа сравниваются со вторым положением головы и вторым направлением взгляда данных с датчика; и
определять точность датчика на основании сравнения.
2. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью инструктировать громкоговоритель издавать звуковые инструкции, указывающие требуемое поведение водителя, на основании инструкций проверки.
3. Система по п. 1, в которой данные ответа включают в себя звуковую последовательность, полученную на микрофоне, и информацию о временных характеристиках, полученную из устройства измерения времени.
4. Система по п. 1, в которой датчик является датчиком технического зрения.
5. Система проверки датчика транспортного средства, содержащая:
контроллер, присоединенный к по меньшей мере одному устройству проверки и датчику, причем контроллер выполнен с возможностью:
инструктировать по меньшей мере один блок отображения отображать предмет;
принимать данные ответа из устройства проверки;
сравнивать положение головы и направление взгляда данных ответа с положением головы и направлением взгляда данных с датчика, предоставленных датчиком; и
определять точность датчика на основании сравнения.
6. Система по п. 5, в которой данные ответа включают в себя эталонные данные, принятые из эталонного устройства, и включают в себя по меньшей мере одно из слышимого ответа, данных временных характеристик и данных изображений.
7. Система по п. 6, в которой эталонное устройство включает в себя по меньшей мере одно из камеры транспортного средства, микрофона и устройства измерения времени.
8. Система по п. 5, в которой контроллер дополнительно выполнен с возможностью инструктировать громкоговоритель издавать звуковые инструкции, указывающие требуемое поведение водителя.
9. Система по п. 5, в которой по меньшей мере один блок отображения включает в себя множество блоков отображения, скомпонованных в кабине транспортного средства.
10. Система по п. 5, в которой контроллер выполнен с возможностью инструктировать один из блоков отображения подсвечиваться в течение предопределенного времени.
11. Система по п. 5, в которой контроллер дополнительно выполнен с возможностью инструктировать один из блоков отображения отображать случайно сформированное изображение.
12. Система по п. 11, в которой данные ответа включают в себя по меньшей мере один слышимый ответ, принятый на микрофоне, указывающий случайно сформированное изображение.
13. Система по п. 5, в которой контроллер дополнительно выполнен с возможностью принимать информацию о временных характеристиках из устройства измерения времени.
14. Система проверки датчика транспортного средства, содержащая:
контроллер, присоединенный к первому датчику и второму датчику, причем контроллер выполнен с возможностью сравнивать первые данные с первого датчика, указывающие по меньшей мере одно положение головы и направление взгляда пользователя, со вторыми данными со второго датчика, указывающими направление взгляда водителя, и определять точность второго датчика на основании сравнения.
15. Система по п. 14, в которой контроллер дополнительно выполнен с возможностью определять точность второго датчика на основании дополнительных эталонных данных, принятых из эталонных устройств, в том числе по меньшей мере одного из камеры, устройства измерения времени и микрофона.
16. Система по п. 15, в которой эталонные данные включают в себя по меньшей мере одни из данных изображений, данных временных характеристик и звуковых данных.
| US 2011313259 A1, 22.12.2011 | |||
| US 2013070043 A1, 21.03.2013 | |||
| US 2014058584 A1, 27.02.2014. |

