ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0001] Раскрытое в настоящем документе изобретение относится в целом к системам производства изотопов и, более конкретно, к системам производства изотопов, имеющим жидкие мишени, облучаемые пучком частиц.
[0002] Радиоизотопы (также называемые радионуклидами) имеют несколько применений в медикаментозном лечении: визуализация и исследования, а также другие применения, которые не связаны с медициной. Системы, которые производят радиоизотопы, обычно содержат ускоритель частиц, такой как циклотрон, который ускоряет пучок заряженных частиц (например, ионов Н-) и направляет его в материал мишени для генерации изотопов. Циклотрон содержит источник частиц, который обеспечивает частицы в центральной области ускорительной камеры. Для ускорения и направления частиц вдоль заданной орбиты в ускорительной камере циклотрон использует электрические и магнитные поля. Магнитные поля создаются электромагнитами и магнитным ярмом, который окружает ускорительную камеру. Электрические поля генерируются парой радиочастотных (РЧ) электродов (или дуантами), которые расположены в ускорительной камере. Радиочастотные электроды электрически соединены с ВЧ-генератором, который возбуждает радиочастотные электроды для создания электрического поля. Электрические и магнитные поля заставляют частицы двигаться по спиральной орбите, которая имеет увеличивающийся радиус. Когда частицы достигают наружной части орбиты, частицы могут образовывать пучок частиц, который направляют на материал мишени для производства изотопов.
[0003] Материал мишени (также называемый исходным материалом) обычно помещают внутри камеры сборки-мишени, которая расположена на пути пучка частиц. В некоторых системах материал мишени представляет собой жидкость (далее называемую жидкостью-мишенью). Камера может быть сформирована углублением внутри корпуса мишени и фольгой, которая закрывает углубление. Пучок частиц падает на фольгу и жидкость-мишень внутри камеры. Пучок частиц оставляет относительно большое количество энергии (например, 1-2 кВт) в относительно небольшом объеме (например, 1-3 мл) жидкости-мишени. Тепловая энергия, генерируемая в камере, приводит жидкость-мишень в состояние кипения. Следовательно, внутри жидкости-мишени вдоль поверхности фольги или из объема жидкости-мишени генерируются пузырьки.
[0004] Пузырьки могут приводить к некоторым нежелательным эффектам. Например, технологическая камера обычно делится на область жидкости и область газа или пара, которая расположена над областью жидкости. Пузырьки, образовавшиеся внутри области жидкости, в конечном итоге поднимаются в область газа. Когда в области жидкости имеется более значительная доля пузырьков, пузырьки могут позволить пучку частиц полностью проходить через область жидкости, не приводя к требуемым изменениям изотопов в жидкости-мишени. Таким образом, пузырьки могут снижать эффективность производства радиоизотопов. Кроме того, более значительная доля пузырьков в области жидкости может уменьшать способность жидкости-мишени поглощать тепловую энергию из фольги. Возможно, потребуется чаще заменять или восстанавливать сборку-мишень.
[0005] Обычные способы уменьшения образования пузырьков включают охлаждение технологической камеры путем пропускания жидкости или газа через каналы, которые находятся вблизи технологической камеры. Образование пузырьков также может быть уменьшено путем повышения давления в технологической камере с помощью инертного газа, такого как гелий или аргон. Однако такие способы могут иметь ограниченную эффективность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] В варианте выполнения предложена сборка-мишень для системы производства изотопов. Сборка-мишень содержит корпус, имеющий технологическую камеру и резонатор, который примыкает к технологической камере. Технологическая камера выполнена так, чтобы удерживать жидкость-мишень. Резонатор открыт снаружи корпуса мишени и выполнен с возможностью приема пучка частиц, который падает в технологическую камеру. Сборка-мишень также содержит вибрационное устройство, которое прикреплено к корпусу мишени. Вибрационное устройство выполнено с возможностью создания вибраций, которые испытываются в технологической камере.
[0007] В некоторых вариантах выполнения вибрационное устройство может содержать, например, по меньшей мере одно из следующего: (а) пьезоэлектрический привод или (б) электродвигатель. При необходимости, корпус мишени содержит первую и вторую части, которые прикреплены друг к другу в фиксированных положениях относительно друг друга. Технологическая камера ограничена первой частью корпуса, или второй частью корпуса, или обеими этими частями. Вибрационное устройство прикреплено к первой части корпуса, или ко второй части корпуса, или к обеим этим частям.
[0008] В одном варианте выполнения предлагается система производства изотопов. Система производства изотопов содержит ускоритель частиц, выполненный с возможностью генерирования пучка частиц, и сборку-мишень, которая содержит корпус, имеющий технологическую камеру и резонатор, который расположен смежно с технологической камерой. Технологическая камера выполнена с возможностью удержания жидкости-мишени. Резонатор расположен так, чтобы принимать пучок частиц от ускорителя частиц таким образом, чтобы пучок частиц падал в технологическую камеру. Сборка-мишень содержит вибрационное устройство, которое прикреплено к корпусу мишени. Система производства изотопов также содержит систему управления, которая функционально связана с ускорителем частиц и сборкой-мишенью. Система управления выполнена с возможностью активации вибрационного устройства, когда пучок частиц активирован. Вибрационное устройство выполнено с возможностью вызывать вибрации, которые испытываются в технологической камере.
[0009] При необходимости, система управления выполнена с возможностью активации вибрационного устройства в ответ на определение того, что пучок частиц получил пороговый ток пучка. При необходимости, вибрационное устройство выполнено с возможностью работы в диапазоне рабочих частот. Система управления может быть выполнена с возможностью выбора рабочей частоты вибрационного устройства на основе тока пучка частиц.
[0010] В одном варианте выполнения предлагается способ получения радиоизотопов. Способ включает направление потока частиц на жидкость-мишень в технологической камере корпуса мишени. Технологическая камера содержит область жидкости и область газа. Пучок частиц вызывает образование пузырьков в области жидкости технологической камеры. Способ также включает обеспечение вибрации корпуса мишени, чтобы заставить пузырьки перемещаться из области жидкости в область газа.
[0011] При необходимости, способ может включать определение тока пучка частиц, причем при обеспечении вибрации корпуса мишени обеспечивают указанную вибрацию в ответ на определение того, что пучок частиц получил пороговый ток пучка.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Фиг. 1 изображает блок-схему системы производства изотопов, выполненной в соответствии с вариантом выполнения.
[0013] Фиг. 2 изображает вид в аксонометрии сборки-мишени, выполненной в соответствии с вариантом выполнения.
[0014] Фиг. 3 изображает другой вид в аксонометрии сборки-мишени, показанной на Фиг. 2.
[0015] Фиг. 4 изображает сборку-мишень, показанную на Фиг. 2, в разобранном виде.
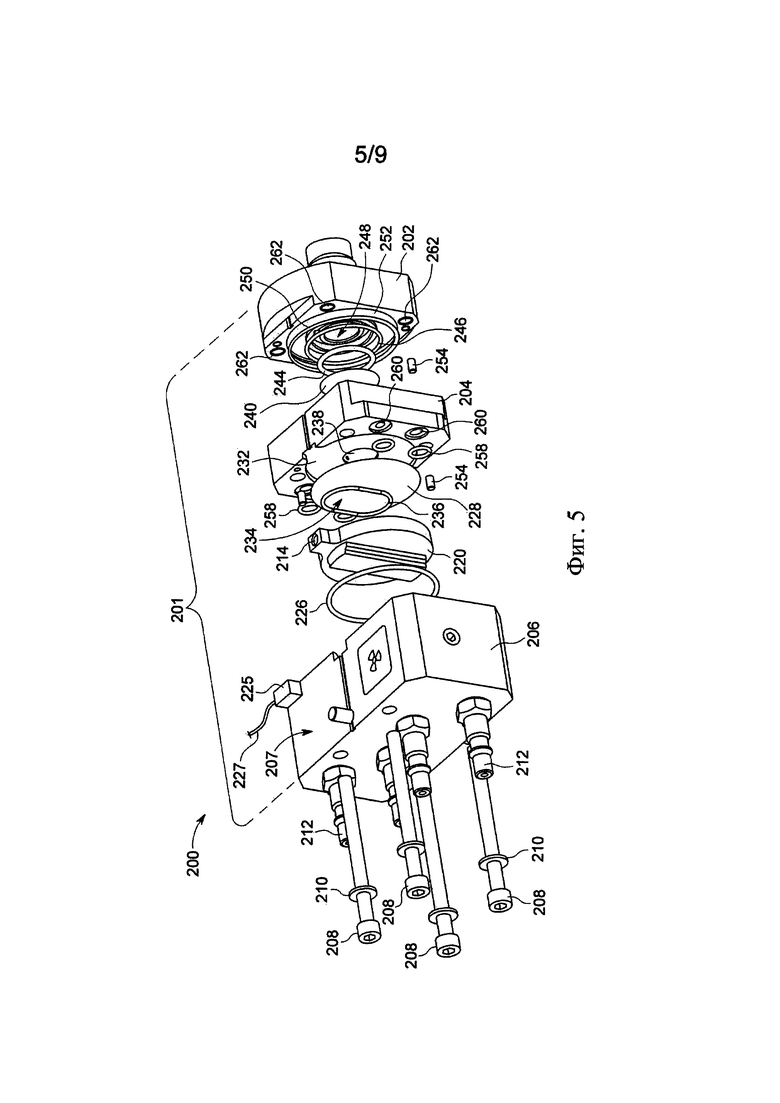
[0016] Фиг. 5 изображает сборку-мишень, показанную на Фиг. 2, в разобранном виде с другой стороны.
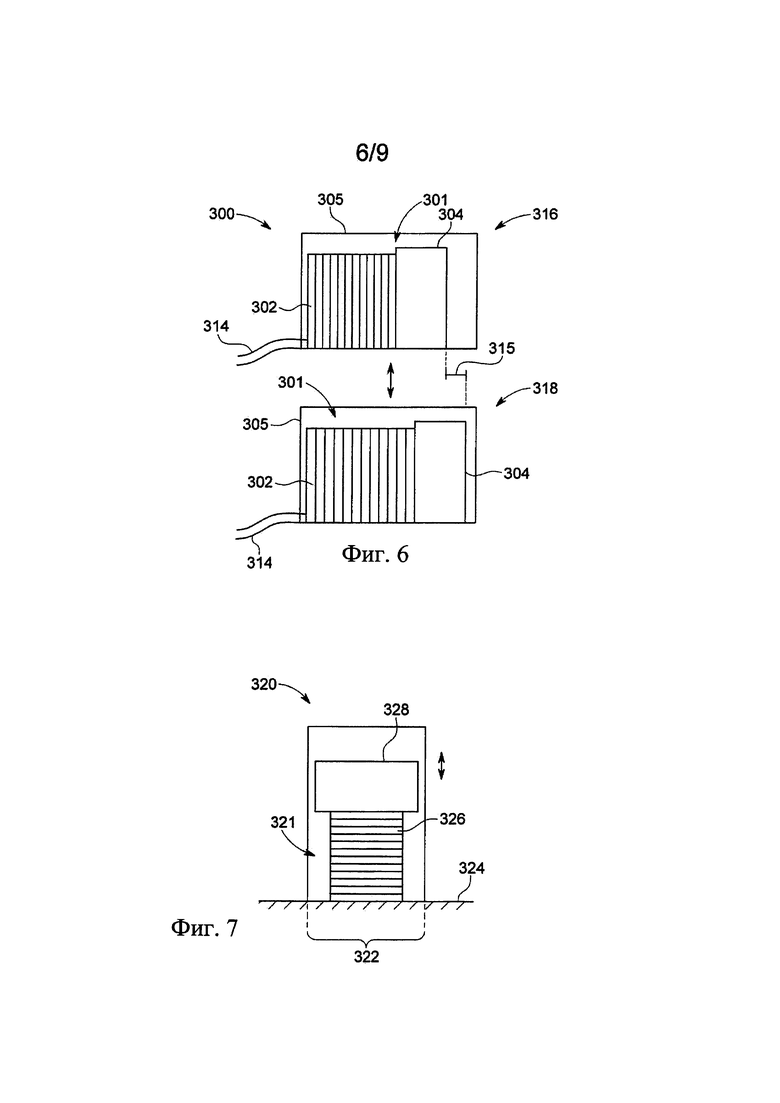
[0017] Фиг. 6 изображает вид сбоку в разрезе вибрационного устройства, выполненного в соответствии с вариантом выполнения, иллюстрирующий вибрационное устройство в первом рабочем состоянии и во втором рабочем состоянии.
[0018] Фиг. 7 изображает вид сбоку в разрезе вибрационного устройства, выполненного в соответствии с вариантом выполнения, которое содержит пьезоэлектрический привод.
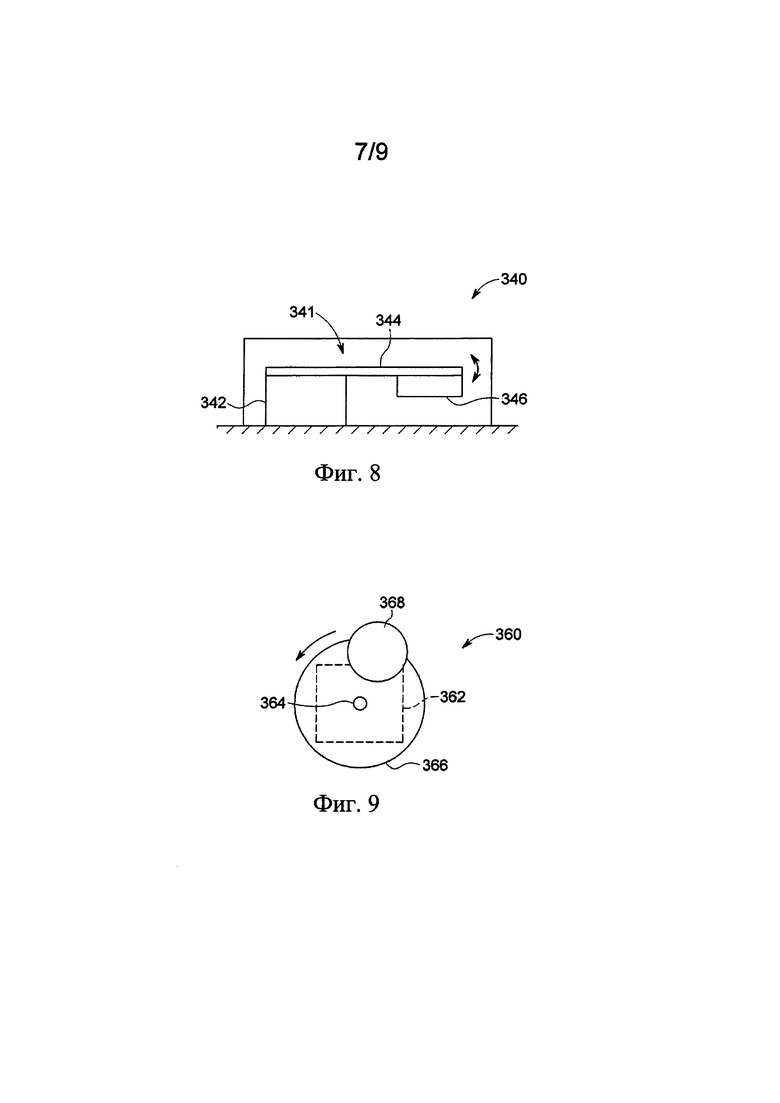
[0019] Фиг. 8 изображает вид сбоку в разрезе вибрационного устройства, выполненного в соответствии с вариантом выполнения, которое содержит пьезоэлектрический привод.
[0020] Фиг. 9 изображает вид сверху вибрационного устройства, выполненного в соответствии с вариантом выполнения, которое содержит электродвигатель.
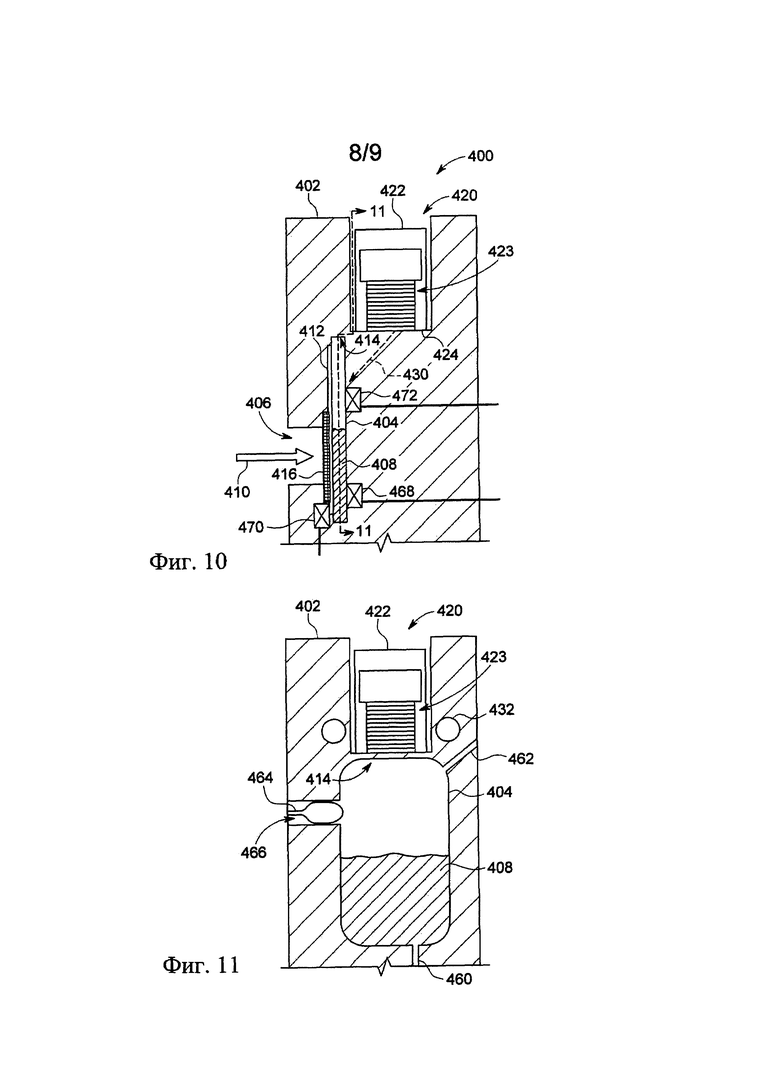
[0021] Фиг. 10 изображает вид сбоку в разрезе сборки-мишени, выполненной в соответствии с одним вариантом выполнения.
[0022] Фиг. 11 изображает вид спереди в разрезе сборки-мишени, показанной на Фиг. 10.
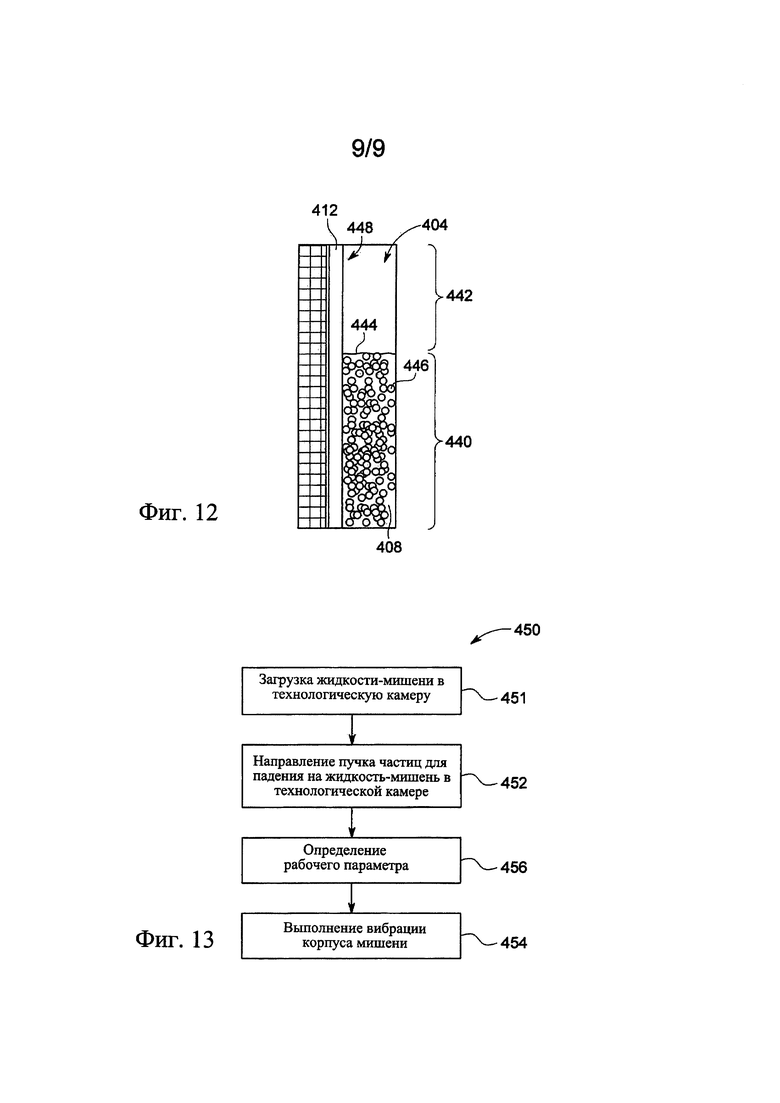
[0023] Фиг. 12 изображает увеличенный вид технологической камеры сборки-мишени, показанной на Фиг. 10.
[0024] Фиг. 13 иллюстрирует блок-схему способа получения радиоизотопов, в соответствии с вариантом выполнения.
ПОДРОБНОЕ ОПИСАНИЕ
[0025] Описанная выше сущность изобретения, а также последующее подробное описание некоторых вариантов выполнения будут лучше поняты при прочтении вместе с прилагаемыми чертежами. В той степени, в которой чертежи иллюстрируют диаграммы блоков различных вариантов выполнения, блоки не обязательно указывают на разделение между аппаратными средствами. Таким образом, например, один или несколько блоков могут быть реализованы в виде единой части аппаратного средства или нескольких частей аппаратного средства. Следует понимать, что различные варианты выполнения не ограничиваются конструкциями и инструментами, показанными на чертежах.
[0026] Элемент или этап, указанный в единственном числе и сопровождаемый неопределенным артиклем, так, как он используется в настоящем документе, следует понимать как исключающее множественное число указанных элементов или этапов, если это исключение явным образом не указано. Кроме того, ссылки на «один вариант выполнения» не предназначены для интерпретации как исключения существования дополнительных вариантов выполнения, которые также включают в себя перечисленные признаки. Более того, если явным образом не указано обратное, варианты выполнения, «содержащие» или «имеющие» элемент или множество элементов конкретным свойством, могут включать дополнительные такие элементы, которые не имеют этого свойства.
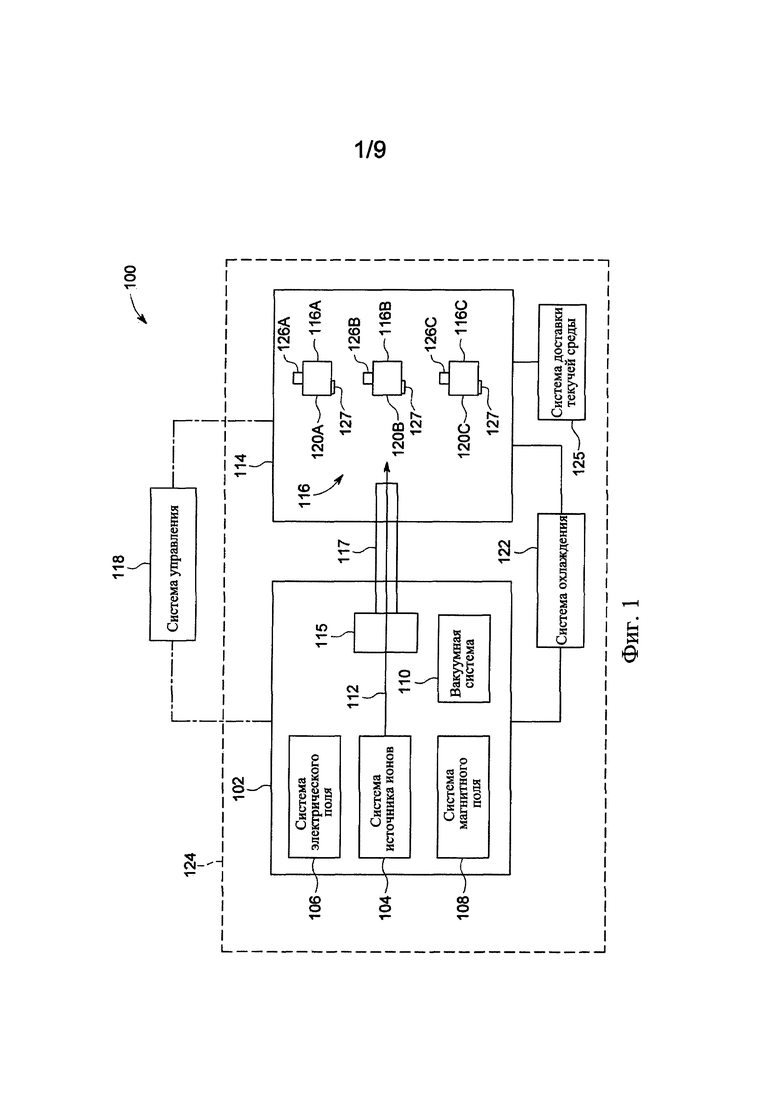
[0027] На Фиг. 1 показана блок-схема системы 100 производства изотопов, выполненной в соответствии с вариантом выполнения. Система 100 производства изотопов содержит ускоритель 102 частиц (например, циклотрон), имеющий несколько подсистем, включая систему 104 ионного источника, систему 106 электрического поля, систему 108 магнитного поля, вакуумную систему 110, систему 122 охлаждения и систему 125 управления текучей средой. Во время использования системы 100 производства изотопов материал 116 мишени (например, жидкость-мишень) подается в заданную технологическую камеру 120 системы 114 мишени. Материал 116 мишени может быть подан в технологическую камеру 120 через систему 125 управления текучей средой. Система 125 управления текучей средой может управлять потоком материала 116 мишени посредством одного или нескольких насосов и клапанов (не показаны) в технологическую камеру 120. Система 125 также может управлять давлением, которое испытывается в технологической камере 120 за счет подачи инертного газа в камеру 120. Во время работы ускорителя 102 частиц заряженные частицы помещаются внутрь или вводятся в ускоритель 102 частиц через систему 104 ионного источника. Система 108 магнитного поля и система 106 электрического поля генерируют соответствующие поля, которые взаимодействуют друг с другом для образования пучка 112 частиц заряженных частиц.
[0028] На Фиг. 1 также показана система 100 производства изотопов, имеющая систему 115 экстракции. Система 114 мишени может быть расположена смежно с ускорителем 102. Для получения изотопов пучок 112 частиц направляется ускорителем 102 частиц через систему 115 экстракции вдоль траектории прохождения пучка или канала 117 для пучка и в систему 114 мишени, так что пучок 112 частиц падает на материал 116 мишени, расположенный в указанной технологической камере 120. Следует отметить, что в некоторых вариантах выполнения ускоритель 102 частиц и система 114 мишени не разделены пространством или зазором (например, не разделены расстоянием) и/или не являются отдельными частями. Соответственно, в этих вариантах выполнения ускоритель 102 частиц и система 114 мишени могут образовывать один компонент или часть, так что канал 117 для пучка между компонентами или частями не предусмотрен.
[0029] Система 100 выполнена с возможностью производства радиоизотопов (также называемых радионуклидами), которые могут использоваться в медицинской визуализации, исследованиях и лечении, но также и в других применениях, которые не связаны с медициной, таких как научные исследования или анализ. При использовании в медицинских целях, таких как радионуклидное сканирование (NM) или позитронно-эмиссионная томография (PET), радиоизотопы также можно называть трассерами. Система 100 может производить изотопы в заранее определенных количествах или партиях, таких как индивидуальные дозы для использования в медицинской визуализации или лечении. В качестве примера система 100 может генерировать протоны для производства изотопов 18F- в жидкой форме. Материал мишени, используемый для производства этих изотопов, может представлять собой обогащенную воду 18О или 16О. В некоторых вариантах выполнения система 100 может также генерировать протоны или дейтроны для производства 15O-меченной воды. Могут быть произведены изотопы, обладающие различными уровнями активности.
[0030] В некоторых вариантах выполнения система 100 использует технологию 1Н- и приводит заряженные частицы к низкой энергии (например, около 8 МэВ) с током пучка приблизительно 10-30 мкА. В таких вариантах выполнения отрицательные ионы водорода ускоряются и направляются через ускоритель 102 частиц и в систему 115 экстракции. Отрицательные ионы водорода могут затем ударять в обдирающую фольгу (не показана на Фиг. 1) системы 115 экстракции, удаляя, тем самым, пару электронов и превращая частицу в положительный ион, 1Н+. Однако в альтернативных вариантах выполнения заряженные частицы могут быть положительными ионами, такими как 1Н+, 2Н+ и 3Не+. В таких альтернативных вариантах выполнения система 115 экстракции может содержать электростатический дефлектор, который создает электрическое поле, которое направляет пучок частиц к материалу 116 мишени. Следует отметить, что различные варианты выполнения не ограничены использованием в системах с более низкой энергией, а могут использоваться и в системах с более высокой энергией, например, до 25 МэВ и при более высоких токах пучка.
[0031] Система 100 может содержать систему 122 охлаждения, которая переносит охлаждающую текучую среду (например, воду или газ, такой как гелий), к различным компонентам различных систем, чтобы поглощать тепло, генерируемое соответствующими компонентами. Например, один или несколько каналов охлаждения могут проходить вблизи технологических камер 120 и поглощать от них тепловую энергию. Система 100 может также содержать систему 118 управления, которая может использоваться для управления работой различных систем и компонентов. Система 118 управления может содержать необходимую схему для автоматического управления системой 100 и/или обеспечивать ручное управление некоторыми функциями. Например, система 118 управления может содержать один или несколько процессоров или другую схему на основе логики. Система 118 управления может содержать один или несколько пользовательских интерфейсов, которые расположены вблизи или удаленно от ускорителя 102 частиц и системы 114 мишени. Хотя это и не показано на Фиг. 1, система 100 может также содержать один или несколько радиационных и/или магнитных экранов для ускорителя 102 частиц и системы 114 мишени.
[0032] Система 100 может быть выполнена с возможностью ускорения заряженных частиц до заданного уровня энергии. Например, некоторые описанные в настоящем документе варианты выполнения ускоряют заряженные частицы до энергии около 18 МэВ или менее. В других вариантах выполнения система 100 ускоряет заряженные частицы до энергии приблизительно 16,5 МэВ или менее. В конкретных вариантах выполнения система 100 ускоряет заряженные частицы до энергии приблизительно 9,6 МэВ или менее. В более конкретных вариантах выполнения система 100 ускоряет заряженные частицы до энергии приблизительно 7,8 МэВ или менее. Однако описанные в настоящем документе варианты выполнения также могут иметь энергию выше 18 МэВ. Например, варианты выполнения могут иметь энергию выше 100 МэВ, 500 МэВ или более. Аналогично, варианты выполнения могут использовать различные значения тока пучка. В качестве примера, ток пучка может составлять приблизительно около 10-30 мкА. В других вариантах выполнения ток пучка может быть выше 30 мкА, выше 50 мкА или выше 70 мкА. Однако в других вариантах выполнения ток пучка может быть выше 100 мкА, выше 150 мкм или выше 200 мкА.
[0033] Система 100 может иметь несколько технологических камер 120А-С, где расположены отдельные материалы 116А-С мишени. Для смещения технологических камер 120А-С относительно пучка 112 частиц может быть использовано смещающее устройство или система (не показана), так что пучок 112 частиц падает на другой материал 116 мишени. Во время процесса смещения также может сохраняться вакуум. В качестве альтернативы, ускоритель 102 частиц и система 115 экстракции могут не направлять пучок 112 частиц только по одному пути, но могут направлять пучок 112 частиц по уникальному пути для каждой различной технологической камеры 120А-С. Кроме того, канал 117 для пучка может быть по существу прямолинейным от ускорителя 102 частиц до технологической камеры 120А-С, или, в качестве альтернативы, канал 117 для пучка может искривляться или поворачиваться в одной или нескольких точках вдоль пути. Например, магниты, расположенные рядом с каналом 117 для пучка, могут быть выполнены с возможностью перенаправления пучка 112 частиц вдоль другого пути.
[0034] Как описано в настоящем документе, варианты выполнения могут содержать вибрационные устройства 126 (обозначенные как 126А, 126В, 126С), которые непосредственно связаны с корпусом, который ограничивает технологическую камеру 120. Вибрационное устройство 126 также может упоминаться как вибратор или встряхиватель, при этом оно выполнено с возможностью создания механического движения (например, вибрации) корпуса, которые испытываются в технологической камере. Как описано в настоящем документе, внутри технологической камеры вдоль поверхностей, которые ограничивают технологическую камеру или в пределах области жидкости в технологической камере могут генерироваться пузырьки. Вибрации могут облегчать или ускорять отрыв пузырьков с поверхностей и всплывание пузырьков в область пара, образованную над областью жидкости. В таких вариантах выполнения вибрации могут уменьшить время, в течение которого пузырьки находятся внутри жидкости, и, следовательно, уменьшить нежелательные эффекты, которые пузырьки оказывают на плотность области жидкости. В некоторых вариантах выполнения вибрационные устройства 126 управляются системой 118 управления. Например, система 118 управления может активировать вибрационные устройства 126 после обнаружения одного или нескольких критериев. Более конкретно, система 118 управления может быть с возможностью обмена данными связана с одним или несколькими датчиками 127, которые обнаруживают заданный рабочий параметр, такой как ток пучка, системы 100 производства изотопов. В других вариантах выполнения вибрационное устройство 126 может быть активировано, когда ускоритель 102 частиц активирован.
[0035] Примеры систем производства изотопов и/или циклотронов, имеющих одну или несколько описанных в настоящем документе подсистем, могут быть найдены в публикации заявки на патент США №2011/0255646, которая полностью включена в настоящее описание посредством ссылки. Кроме того, системы производства изотопов и/или циклотроны, которые могут использоваться с вариантами выполнения, описанными в настоящем документе, также описаны в заявках на патент США №12/492200; №12/435903; №12/435949; №12/435931 и в заявке на патент США №14/754878 (номер патентного поверенного №281969 (553-1948)), каждая из которых включена в настоящее описание посредством ссылки в полном объеме. Вибрационные устройства (или вибраторы или встряхиватели), описанные в настоящем документе, могут быть похожи на электромеханические двигатели, описанные в патенте США №8653762, который полностью включен в настоящее описание посредством ссылки.
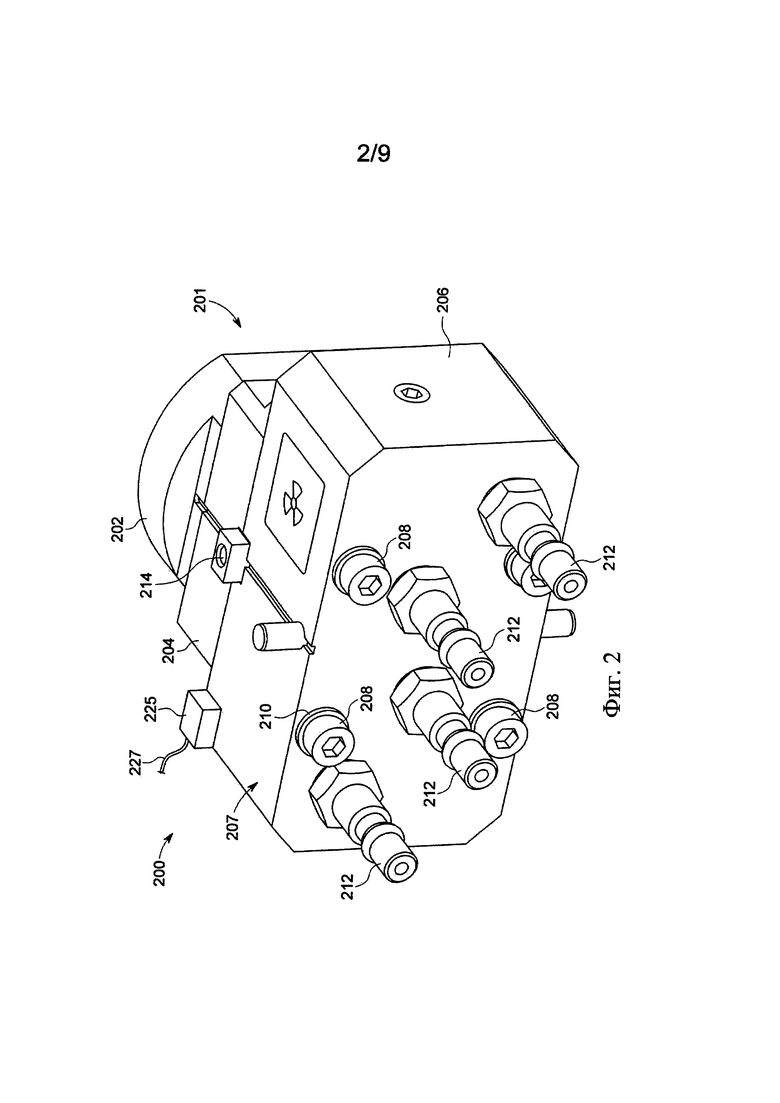
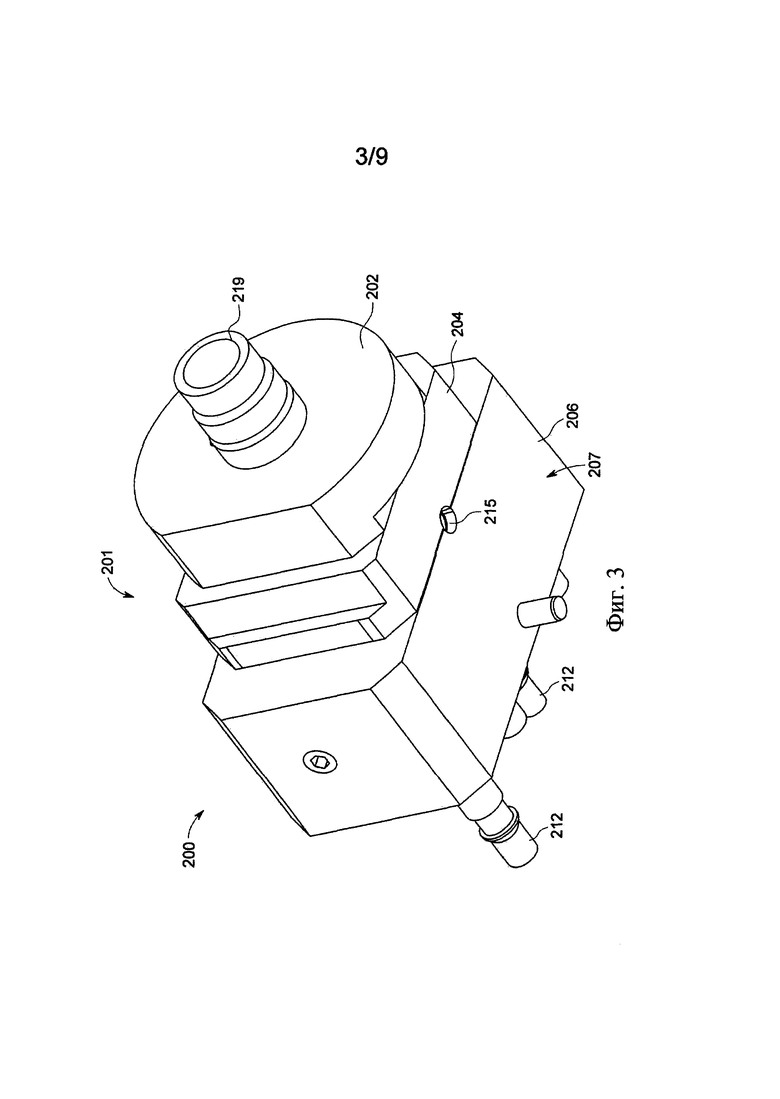
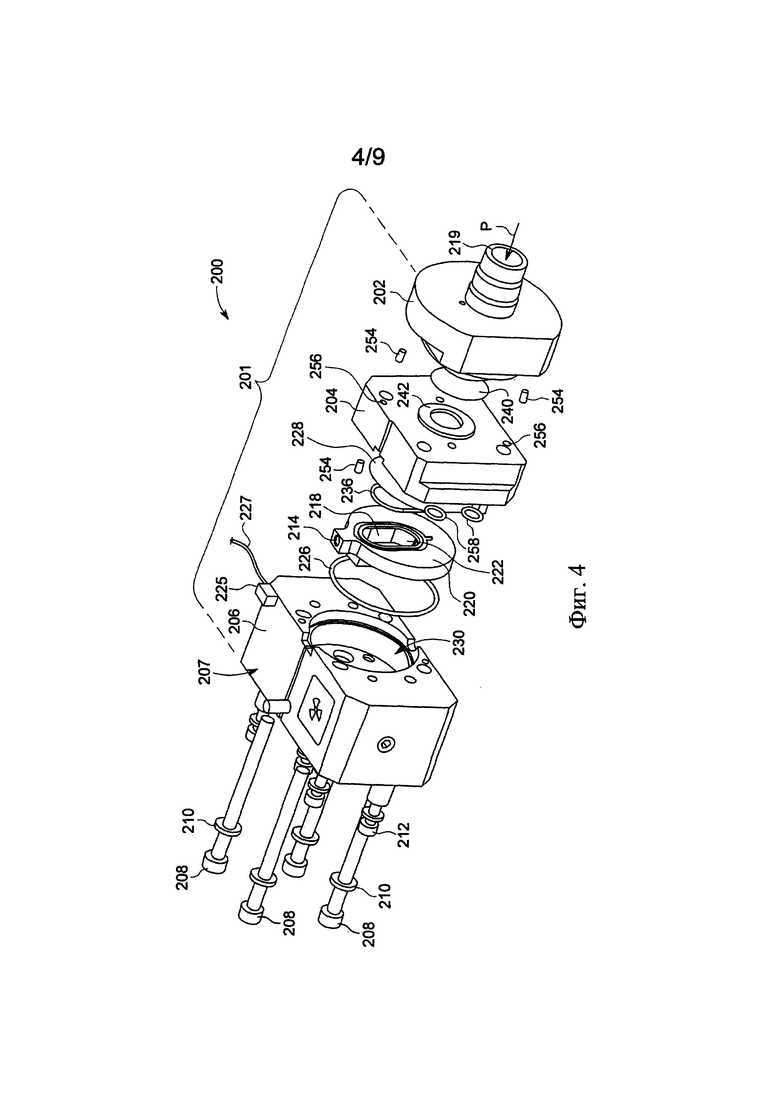
[0036] На Фиг. 2 и 3 изображены, соответственно, вид сзади и вид спереди в аксонометрии сборки 200 мишени, выполненной в соответствии с одним вариантом выполнения. На Фиг. 4 и 5 показаны разобранные виды сборки-мишени 200. Сборка-мишень 200 содержит корпус 201 и вибрационное устройство 225 (показано на Фиг. 2, 4 и 5), которое выполнено с возможностью прикрепления к корпусу 201 мишени. Корпус 201 мишени показан полностью собранным на Фиг. 2 и 3. Корпус 201 мишени сформирован из трех частей 202, 204, 206 и вставки 220 мишени (Фиг. 4 и 5). Части 202, 204, 206 корпуса ограничивают наружную конструкцию корпуса 201 мишени. В частности, наружная конструкция корпуса 201 мишени выполнена из части 202 корпуса (которая может упоминаться как передняя часть или фланец корпуса), части 204 корпуса (которая может упоминаться как промежуточная часть корпуса) и части 206 корпуса (которая может упоминаться как задняя часть корпуса). Части 202, 204 и 206 корпуса содержат блоки из жесткого материала, имеющие каналы и углубления для формирования различных элементов. Каналы и углубления могут содержать один или несколько компонентов сборки-мишени 200. Части 202, 204 и 206 корпуса могут быть прикреплены друг к другу с помощью подходящих крепежных элементов, показанных в виде болтов 208 (Фиг. 2, 4 и 5), каждый из которых имеет соответствующую шайбу 210. Когда части 202, 204 и 206 корпуса скреплены друг с другом, они образуют герметичный корпус 201 мишени.
[0037] Также показано, что сборка-мишень 200 содержит фитинги 212, которые расположены вдоль задней поверхности 213. Фитинги 212 могут выполнять функцию портов, которые обеспечивают проточное сообщение с корпусом 201 мишени. Фитинги 212 выполнены с возможностью функционального соединения с системой управления текучей средой, такой как система 125 управления текучей средой (Фиг. 1). Фитинги 212 могут обеспечивать проточное сообщение для гелия и/или охлаждающей воды. В дополнение к портам, образованным фитингами 212, сборка-мишень 200 может содержать первый порт 214 для материала и второй порт 215 для материала. Первый и второй порты 214, 215 для материала проточно сообщаются с технологической камерой 218 (Фиг. 4) сборки-мишени 200. Первый и второй порты 214, 215 для материала функционально соединены с системой управления текучей средой. В иллюстративном варианте выполнения второй порт 215 для материала может подавать материал мишени в технологическую камеру 218, а первый порт 214 для материала может подавать рабочий газ (например, инертный газ) для управления давлением, испытываемым жидкостью-мишенью в технологической камере 218. В других вариантах выполнения, однако, первый порт 214 для материала может подавать материал мишени, а второй порт 215 для материала может подавать рабочий газ.
[0038] Корпус 201 мишени образует канал или полость 221 для пучка, который позволяет пучку частиц (например, протонному пучку) падать на материал мишени в технологической камере 218. Пучок частиц (обозначенный стрелкой Р на Фиг. 4) может входить в корпус 201 мишени через отверстие 219 канала (Фиг. 3 и 4). Пучок частиц проходит через сборку-мишень 200 из отверстия 219 канала в технологическую камеру 218 (Фиг. 4). Во время работы технологическая камера 218 заполнена жидкостью-мишенью, например, приблизительно 2,5 миллилитрами (мл) воды, содержащей заданные изотопы (например, H218O). Технологическая камера 218 ограничена во вставке 220 мишени, которая может содержать, например, ниобиевый материал, имеющий полость 222 (Фиг. 4), которая открыта с одной стороны вставки 220 мишени. Вставка 220 содержит первый и второй порты 214, 215 для материала. Первый и второй порты 214, 215 выполнены с возможностью приема, например, фитингов или сопел.
[0039] В отношении Фиг. 4 и 5, вставка 220 мишени расположена на одной оси между частью 206 корпуса и частью 204 корпуса. Сборка-мишень 200 может содержать уплотнительное кольцо 226, которое расположено между частью 206 корпуса и вставкой 220 мишени. Сборка-мишень 200 также содержит фольгированный элемент 228 и уплотнительную кромку 236 (например, кромку Helicoflex®). Фольгированный элемент 228 может содержать диск из металлического сплава, включающий, например, сплав на основе термически обработанного кобальта, такой как Havar®. Фольгированный элемент 228 расположен между частью 204 корпуса и вставкой 220 мишени и накрывает полость 222, закрывая, тем самым, технологическую камеру 218. Часть 206 корпуса также содержит полость 230 (Фиг. 4), которая имеет форму и размер, обеспечивающие возможность приема уплотнительного кольца 226 и части вставки 220 мишени. Кроме того, часть 206 корпуса содержит полость 232 (Фиг. 4), которая имеет размер и форму, обеспечивающие возможность размещения части фольгированного элемента 228. Фольгированный элемент 228 также совмещен с отверстием 238 (Фиг. 5) в канал через часть 204 корпуса.
[0040] При необходимости, между частью 204 корпуса и частью 202 корпуса может быть предусмотрен фольгированный элемент 240. Фольгированный элемент 240 может быть сплавным диском, подобным фольгированному элементу 228. Фольгированный элемент 240 совмещен с отверстием 238 корпуса 204, имеющим по периферии кольцевую кромку 242 (Фиг. 4). Как показано на Фиг. 4, уплотнение 244, уплотнительное кольцо 246 и уплотнительное кольцо 250 концентрически совмещены с отверстием 248 части 202 корпуса и соединены с кромкой 252 части 202 корпуса. Уплотнение 244, уплотнительное кольцо 246 и уплотнительное кольцо 250 установлены между фольгированным элементом 240 и частью 202 корпуса. Следует отметить, что может быть предусмотрено большее или меньшее количество фольгированных элементов. Например, в некоторых вариантах выполнения предусмотрен только фольгированный элемент 228. Соответственно, в различных вариантах выполнения предусмотрен только один фольгированный элемент или многослойный фольгированный элемент.
[0041] Следует отметить, что фольгированные элементы 228 и 240 не ограничены формой диска или круглой формой и могут иметь разные формы, конфигурации и конструкции. Например, указанный один или несколько фольгированных элементов 228 и 240 или дополнительные фольгированные элементы могут иметь, в частности, квадратную форму, прямоугольную форму или овальную форму. Кроме того, следует отметить, что фольгированные элементы 228 и 240 не ограничены выполнением из конкретного материала, но в различных вариантах выполнения выполнены из активирующего материала, такого как умеренно или сильно активирующий материал, который может иметь индуцированную в нем радиоактивность, как описано более подробно в настоящем документе. В некоторых вариантах выполнения фольгированные элементы 228 и 240 являются металлическими и выполнены из одного или нескольких металлов.
[0042] Как показано на Фиг. 4 и 5, в отверстия 256 в каждой из частей 202, 204 и 206 корпуса вставлены штифты 254, чтобы совместить эти элементы, когда сборка-мишень 200 собрана. Кроме того, уплотнительные кольца 258 совмещены с отверстиями 260 части 204 корпуса для вставления через них болтов 208, которые закрепляются внутри отверстий 262 (например, резьбовых отверстий) части 202 корпуса.
[0043] Во время работы, когда пучок частиц проходит через сборку-мишень 200 из части 202 корпуса в технологическую камеру 218, фольгированные элементы 228 и 240 могут быть сильно активированы (например, в них индуцирована радиоактивность). Фольгированные элементы 228 и 240, которые могут представлять собой, например, тонкие (например, 5-50 мкм или микрон (μм) диски из фольги, изолируют вакуум внутри ускорителя и, в частности, ускорительной камеры от жидкости-мишени в полости 222. Фольгированные элементы 228 и 240 обеспечивают возможность прохождения охлаждающего гелия через них и/или между ними. Следует отметить, что фольгированные элементы 228 и 240 имеют толщину, которая обеспечивает возможность прохождения через них пучка частиц. Следовательно, фольгированные элементы 228 и 240 могут стать сильно излучаемыми и активированными.
[0044] Некоторые варианты выполнения обеспечивают самоэкранирование сборки-мишени 200, которое активно экранирует сборку-мишень 200, чтобы экранировать и/или предотвращать выход излучения из активированных фольгированных элементов 228 и 240 из сборки-мишени 200. Таким образом, фольгированные элементы 228 и 240 инкапсулированы в активный радиационный экран. В частности, по меньшей мере одна из, а в некоторых вариантах выполнения, все части 202, 204 и 206 корпуса выполнены из материала, который ослабляет излучение внутри сборки-мишени 200 и, в частности, из фольгированных элементов 228 и 240. Следует отметить, что части 202, 204 и 206 корпуса могут быть выполнены из одинаковых материалов, различных материалов или разных количеств или комбинаций одинаковых или различных материалов. Например, части 202 и 204 корпуса могут быть выполнены из одного материала, такого как алюминий, а часть 206 корпуса может быть выполнена из комбинации алюминия или вольфрама.
[0045] Часть 202, часть 204 и/или часть 206 корпуса выполнены таким образом, что толщина каждой из них, в частности, между фольгированными элементами 228 и 240 и наружной частью сборки-мишени 200, обеспечивает экранирование для ослабления испускаемого из них излучения. Следует отметить, что часть 202, часть 204 и/или часть 206 корпуса могут быть выполнены из любого материала, имеющего величину плотности, большую, чем у алюминия. Кроме того, каждая из части 202, части 204 и/или части 206 корпуса может быть выполнена из различных материалов или комбинаций, или материалов, как описано более подробно в настоящем документе.
[0046] Вибрационное устройство 225 выполнено с возможностью прикрепления к по меньшей мере одной из частей корпуса. Как используется в настоящем документе, когда вибрационное устройство «прикреплено к» элементу, вибрационное устройство прикреплено к элементу таким образом, который является достаточным для передачи вибраций к этому элементу. Вибрационное устройство может быть прикреплено с помощью одного или нескольких элементов. Например, вибрационное устройство может содержать корпус, который прикреплен к корпусу мишени посредством метизов (например, винтов или болтов). В качестве альтернативы или в дополнение к метизам, вибрационное устройство может быть прикреплено к корпусу мишени посредством крепежных элементов других типов (например, защелки, застежки, ремни и т.п.) и/или клеем. В качестве примера, корпус мишени, такой как корпус 201 мишени, может содержать первую и вторую части, которые прикреплены друг к другу и имеют фиксированные положения относительно друг друга. Технологическая камера может быть ограничена первой частью корпуса, или второй частью корпуса, или обеими этими частями. Вибрационное устройство может быть прикреплено к первой части корпуса, или второй части корпуса, или обеим этим частям.
[0047] По сравнению с системами, которые не используют вибрационное устройство, вибрационное устройство может генерировать вибрации, которые приводят к образованию пузырьков в технологической камере 218 для более быстрого отсоединения от поверхностей, которые ограничивают технологическую камеру. В некоторых случаях, по сравнению с системами, которые не используют вибрационное устройство, вибрационное устройство 225 может увеличить частоту или скорость, с которой пузырьки поднимаются внутри жидкости-мишени в область зазора в технологической камере.
[0048] Как показано на Фиг. 2, 4 и 5, вибрационное устройство 225 прикреплено к части 206 корпуса. Однако в других вариантах выполнения вибрационное устройство 225 может быть прикреплено к части 204 корпуса, к части 202 корпуса, или к вставке 220 мишени. В других вариантах выполнения вибрационное устройство 225 может быть одновременно прикреплено к более чем одной части корпуса. Например, если наружные поверхности двух частей корпуса являются гладкими или ровными, то вибрационное устройство 225 может проходить через границу раздела между двумя частями корпуса.
[0049] В проиллюстрированном варианте выполнения вибрационное устройство 225 прикреплено к наружной или внешней поверхности 207 части 206 корпуса. В других вариантах выполнения вибрационное устройство 225 может быть расположено внутри углубления, полости или камеры сборки-мишени 200. В проиллюстрированном варианте выполнения вибрационное устройство 225 электрически соединено с системой управления (не показана), такой как система 118 управления (Фиг. 1) с помощью одного или нескольких проводов 227, так что система управления может управлять работой и/или подавать питание к вибрационному устройству 225. Однако предполагается, что вибрационное устройство 225 может управляться беспроводным способом и/или принимать питание беспроводным образом.
[0050] На Фиг. 6-9 показаны вибрационные устройства, которые могут быть похожими или идентичными вибрационному устройству 126 (Фиг. 1) или вибрационному устройству 225 (Фиг. 2). Вибрационные устройства могут приводиться в действие с заданной частотой и амплитудой, что облегчает удаление пузырьков или, более конкретно, заставляет пузырьки быстрее отрываться от поверхностей, которые ограничивают технологическую камеру, и/или заставляют пузырьки быстрее перемещаться из области жидкости в область газа внутри технологической камеры.
[0051] На Фиг. 6 показан вид сбоку в разрезе вибрационного устройства 300 в первом и втором состояниях 316, 318. Вибрационное устройство 300 содержит пьезоэлектрический привод 301, имеющий ряд пьезоэлектрических элементов 302, которые функционально соединены с массой или весом 304. Пьезоэлектрические элементы 302 вибрационного устройства 300 могут быть относительно нечувствительны к ионизирующему излучению. В проиллюстрированном варианте выполнения пьезоэлектрические элементы 302 и масса 304 заключены в общий корпус 305. Общий корпус 305 может иметь различные формы, такие как цилиндрическая форма или форма прямоугольного параллелепипеда.
[0052] Пьезоэлектрические элементы 302 выполнены с возможностью приведения в действие электрически, например, путем приложения напряжения или электрического поля к пьезоэлектрическим элементам 302. Например, каждый пьезоэлектрический элемент 302 может содержать подходящий материал (например, керамический материал) для проявления пьезоэлектрического эффекта (или обратного пьезоэлектрического эффекта) и быть расположенным между двумя проводящими пластинами (без номера позиции), которые напоминают конденсатор. Когда прикладывается напряжение, пьезоэлектрические элементы 302 могут сжиматься заранее заданным образом, изменяя, тем самым, размер или форму пьезоэлектрического привода 301. Таким образом, пьезоэлектрические элементы 302 могут совместно содействовать перемещению массы 304 из первого положения в первом состоянии 316 во второе положение во втором состоянии 318.
[0053] В проиллюстрированном варианте выполнения пьезоэлектрический привод 301 представляет собой прямолинейный привод, так что масса 304 перемещается вдоль оси. Общее расстояние перемещения вдоль оси обозначено как 315. Как показано двунаправленной стрелкой на Фиг. 6, пьезоэлектрические элементы 302 выполнены с возможностью многократного перемещения массы 304, чтобы вызывать вибрации. Масса 304 может перемещаться с заданной частотой. В качестве примера, масса 304 может перемещаться с заданной частотой от 100 Гц до 100 кГц. В конкретных вариантах выполнения заданная частота может составлять от 500 Гц до 1,0 кГц.
[0054] В некоторых вариантах выполнения пьезоэлектрический привод 301 выполнен с возможностью работы в диапазоне частот, например, от 100 Гц до 1,0 кГц. Частоту можно выбирать на основе конкретных условий в сборке-мишени или технологической камере. Амплитуда также может быть выбрана на основе конкретных условий в сборке-мишени или в технологической камере. Следует отметить, что в других вариантах выполнения могут быть использованы другие типы приводов. Например, привод 301 может представлять собой вращающийся привод, который перемещает несбалансированную массу вокруг указанной оси.
[0055] Как показано, вибрационное устройство 300 может содержать электрический провод 314, который с возможностью обмена данными соединяет вибрационное устройство 300 с системой управления, такой как система 118 управления (Фиг. 1). В качестве альтернативы, вибрационное устройство 300 может управляться беспроводным способом. При многократном перемещении массы 304, например, колебательным образом, вибрационное устройство 300 может передавать вибрации в корпус мишени и/или перемещать корпус мишени таким образом, что технологическая камера испытывает вибрации. Корпус мишени может быть подобным или идентичным корпусу 201 мишени (Фиг. 2). Корпус мишени также может быть охарактеризован как встряхиваемый вибрационным устройством 300.
[0056] Фиг. 7 изображает вид сбоку в разрезе вибрационного устройства 320, которое может использоваться с одним или несколькими вариантами выполнения. Вибрационное устройство 320 прикреплено к указанной поверхности 322 корпуса 324 мишени, который может быть аналогичным или идентичным корпусу 201 мишени (Фиг. 2). Заданная поверхность 322 может представлять собой, например, внешнюю поверхность корпуса 324 мишени. В таких вариантах выполнения устройство 320 может быть легко доступно технику или пользователю, имеющему доступ к сборке-мишени (не показана). Однако в других вариантах выполнения вибрационное устройство 320 может быть расположено внутри полости. Полость устройства может быть открыта или полностью закрыта корпусом 324 мишени.
[0057] Вибрационное устройство 320 содержит пьезоэлектрический привод 321, имеющий пакет пьезоэлектрических элементов 326 и массу или вес 328, который соединен с концом пакета. Пьезоэлектрические элементы 326 выполнены с возможностью приведения в действие для многократного перемещения массы 328, чтобы вызвать вибрации. Привод 321 представляет собой прямолинейный привод, так что масса 328 многократно перемещается в направлении к указанной поверхности 322 корпуса 324 мишени и от нее.
[0058] Фиг. 8 изображает вид сбоку в разрезе вибрационного устройства 340, которое может использоваться с одним или несколькими вариантами выполнения. Устройство 340 содержит пьезоэлектрический привод 341 консольного типа, который содержит основание 342, пьезоэлектрическую подложку 344 и массу или вес 346, который прикреплен к пьезоэлектрической подложке 344. Подложка 344 может содержать несколько слоев, включая пьезоэлектрические слои. Слои подложки 344 могут совместно действовать так, чтобы сгибаться между различными состояниями, заставляя, тем самым, массу 346 перемещаться (как показано изогнутой двунаправленной стрелкой). Привод 341 может многократно перемещать массу 346 для генерирования вибраций, которые передаются в корпус мишени.
[0059] На Фиг. 9 показан вид сверху вибрационного устройства 360, которое может использоваться с одним или несколькими вариантами выполнения. Устройство 360 содержит электродвигатель 362, вращающийся вал 364 и опорный диск 366. Вал 364 функционально соединен с электродвигателем 362, который выполнен с возможностью вращения вала 364 вокруг соответствующей оси. Вал 364 прикреплен к центру опорного диска 366. Вибрационное устройство 360 также содержит массу или вес 368, который соединен с отстоящим от центра положением опорного диска 366. Когда электродвигатель 362 вращает вал 364, масса 368 многократно перемещается или смещается осциллирующим образом, что вызывает вибрации.
[0060] Фиг. 10 изображает вид сбоку в разрезе сборки-мишени 400, а Фиг. 11 изображает ступенчатый вид или вид в ступенчатом разрезе сборки-мишени 400, выполненный по линии 11-11, показанной на Фиг. 10. Сборка-мишень 400 может быть аналогична сборке-мишени 200 (Фиг. 2) и использоваться с системой 100 производства изотопов (Фиг. 1). Как показано, сборка-мишень 400 содержит корпус 402, имеющий технологическую камеру 404 и резонатор 406 (Фиг. 10), который примыкает к технологической камере 404. Технологическая камера 404 выполнена с возможностью удерживания жидкости-мишени 408. Как показано на Фиг. 10, резонатор 406 открыт снаружи корпуса 402 мишени, чтобы принимать пучок 410 частиц, который падает в технологическую камеру 404.
[0061] Технологическая камера 404 ограничена фольгированным элементом 412 (Фиг. 10) и внутренней поверхностью 414. Следует понимать, что технологическая камера 404 может быть ограничена более чем одной внутренней поверхностью 414. Во время работы давление, генерируемое внутри технологической камеры 404, направляется к резонатору 406. Давление может составлять, например, от 1,00 до 15,00 МПа или, более конкретно, от 2,00 до 11,00 МПа. Чтобы предотвратить выталкивание фольгированного элемента 412 из резонатора 406, фольгированный элемент 412 поддерживается матричной стенкой 416 (Фиг. 10), которая проходит через резонатор 406. Матричная стенка 416 содержит множество соединенных между собой стенок, которые образуют отверстия. Стенки могут образовывать, например, гексагональную структуру. Отверстия позволяют пучку 410 частиц проходить через матричную стенку 416 и падать на жидкость-мишень 408. Однако следует понимать, что матричная стенка 416 является необязательной и что другие варианты выполнения могут и не содержать матричную стенку 416.
[0062] Корпус 402 мишени ограничивает полость 420 устройства, которая имеет размер и форму, обеспечивающие размещение вибрационного устройства 422 сборки-мишени 400. Вибрационное устройство 422 может содержать одно или несколько вибрационных устройств 422, описанных в настоящем документе. Например, вибрационное устройство 422 содержит пьезоэлектрический привод 423. В качестве альтернативы, вибрационное устройство 422 может содержать электродвигатель. В проиллюстрированном варианте выполнения вибрационное устройство 422 полностью расположено внутри полости 420 устройства. Однако в других вариантах выполнения вибрационное устройство 422 может быть только частично расположено внутри полости 420 устройства.
[0063] Вибрационное устройство 422 прикреплено к заданной поверхности 424 (Фиг. 10) корпуса 402 мишени, которая ограничивает часть полости 420 устройства. В качестве примера, вибрационное устройство 422 может быть прикреплено с использованием крепежного элемента и/или клея. В некоторых случаях вибрационное устройство 422 может быть, по меньшей мере частично, удерживаться посадкой с натягом, созданной между вибрационным устройством 422 и корпусом 402 мишени. В некоторых вариантах выполнения крышка или покрытие может быть размещено над полостью 420 устройства и удерживать вибрационное устройство 422 в контакте с заданной поверхностью 424.
[0064] На Фиг. 10 и 11 корпус 402 мишени представлен только одной частью корпуса, которая содержит твердый материал. В других вариантах выполнения корпус 402 мишени может содержать несколько частей, таких как части 202, 204, 206 корпуса (Фиг. 2). В конкретных вариантах выполнения между заданной поверхностью 424 и внутренней поверхностью 414, которая ограничивает технологическую камеру 404, может иметься непрерывный канал 430, проходящий через твердый материал. В некоторых вариантах выполнения расстояние вдоль непрерывного канала 430 между заданной поверхностью 424 и внутренней поверхностью 414 составляет менее десяти (10) сантиметров (см). В конкретных вариантах выполнения расстояние может составлять менее пяти (5) см. В более конкретных вариантах выполнения расстояние может составлять менее трех (3) см.
[0065] Как показано на Фиг. 11, корпус 402 мишени может содержать один или несколько охлаждающих каналов 432, которые проходят через твердый материал корпуса 402 мишени и расположены вблизи от заданной поверхности 424 или полости 420 устройства. Например, по меньшей мере один из охлаждающих каналов 432 может отстоять на расстояние, меньшее чем пять (5) см или меньшее чем три (3) см, от заданной поверхности 424 или полости 420 устройства. В конкретных вариантах выполнения по меньшей мере один из охлаждающих каналов 432 может отстоять на расстояние, меньшее чем два (2) см или меньшее чем один (1) см от заданной поверхности 424 или полости 420 устройства.
[0066] Охлаждающий(е) канал(ы) 432 выполнен(ы) с возможностью пропускания через себя потока жидкости или газа, который поглощает тепловую энергию, генерируемую вибрационным устройством 422. В конкретных вариантах выполнения охлаждающие каналы 432 являются частью жидкостного контура, который проходит через корпус 402 мишени для активного охлаждения технологической камеры 404. Например, охлаждающие каналы 432 могут проточно сообщаться с одним или несколькими охлаждающими каналами (не показаны), которые проходят вблизи технологической камеры 404.
[0067] На Фиг. 11 также показано, что корпус 402 мишени может образовывать первый канал 460 и второй канал 462, которые проточно сообщаются с технологической камерой 404. Первый канал 460 может быть выполнен с возможностью пропускания жидкости-мишени 408. Второй канал 462 может быть выполнен с возможностью пропускания инертного газа, такого как гелий или аргон, для повышения давления жидкости-мишени 408 в технологической камере 404. Следует понимать, что с технологической камерой 404 могут проточно сообщаться дополнительные каналы.
[0068] На Фиг. 11 также показан датчик 464 давления, который расположен внутри полости 466 корпуса 402 мишени. Датчик 464 давления выполнен с возможностью определения давления технологической камеры 404. Например, давление может увеличиваться, когда пучок частиц падает на жидкость-мишень 408. На Фиг. 10 показаны первый и второй датчики 468, 470 температуры. Первый датчик 468 температуры может быть расположен для обнаружения температуры жидкости-мишени 408. Второй датчик 470 температуры может быть расположен для обнаружения температуры фольги 412 и/или матричной стенки 416. Данные от второго датчика 470 температуры могут быть использованы для определения того, собирается ли фольга разрушиться. В других вариантах выполнения по меньшей мере один из первого или второго датчика 468, 470 температуры может быть электрическим контактом, который передает сигналы, которые коррелируют с током пучка. При необходимости, сборка-мишень 400 может содержать детектор 472 уровня жидкости, который может быть расположен смежно с местоположением границы раздела между жидкостью и газом в технологической камере 404. Данные, полученные с помощью детектора 472 уровня жидкости, могут определять уровень взаимодействия между газом и жидкостью внутри технологической камеры. В некоторых вариантах выполнения данные из детектора 472 уровня жидкости могут использоваться для определения плотности жидкости.
[0069] На Фиг. 12 изображен увеличенный вид в разрезе технологической камеры 404 во время производства радиоизотопа. Технологическая камера 404 имеет суммарное пространство или объем, которое включает область 440 жидкости и область 442 газа или пара. Суммарное пространство технологической камеры 404 может иметь значение, например, между 0,5 миллилитрами (мл) и 5,0 мл или более, в частности между 1,0 мл и 3,0 мл. Область 440 жидкости содержит жидкость-мишень 408 и пузырьки 446, сгенерированные в технологической камере 404, а область 442 газа может содержать инертный газ, пар и газы, создаваемые пузырьками 446. Области 440, 442 жидкости и газа могут иметь интерфейс 444, который обычно представляет собой границу раздела между областями 440, 442 жидкости и газа. Однако понятно, что может быть трудно идентифицировать интерфейс 444, при этом интерфейс 444 может подниматься или опускаться во время работы. Когда жидкость-мишень 408 загружают в технологическую камеру 404, жидкость-мишень 408 может иметь, например, объем, который составляет более 50% от суммарного объема технологической камеры 404. В некоторых вариантах выполнения объем жидкости-мишени 408 составляет более 60% или более 70% от суммарного объема. В более конкретных вариантах выполнения объем жидкости-мишени 408 составляет более 75%, более 80% или более 85% от суммарного объема.
[0070] Во время работы системы для производства изотопов в пределах области 440 жидкости могут образовываться пузырьки 446. Пузырьки 446 могут быть сформированы вдоль внутренней поверхности 448 фольгированного элемента 412 и в пределах области 440 жидкости. Как описано в настоящем документе, вибрационное устройство 422 может обеспечивать вибрации, которые ощущаются в технологической камере 404. Например, вибрации могут перемещать внутренние поверхности 414 и 448, которые ограничивают технологическую камеру 404 и/или могут встряхивать или приводить к возмущениям в жидкости-мишени 408. По сравнению с традиционными системами, которые не имеют вибрационного устройства, вибрации могут (а) быстрее отделять пузырьки 446 от внутренней поверхности 448; и/или (b) заставлять газы, которые образуют пузырьки 446, быстрее подниматься в область 442 газа; и/или (с) заставлять пузырьки быстрее взрываться вдоль интерфейса 444.
[0071] На Фиг. 13 показана блок-схема последовательности операций способа 450 производства радиоизотопов, в соответствии с вариантом выполнения. Например, способ 450 может использовать конструкции или аспекты различных вариантов выполнения (например, систем и/или способов), обсуждаемых в настоящем документе. В различных вариантах выполнения некоторые этапы могут быть опущены или добавлены, некоторые этапы могут быть объединены, некоторые этапы могут выполняться одновременно, некоторые этапы могут выполняться один за другим, некоторые этапы могут быть разделены на несколько этапов, некоторые этапы могут выполняться в другом порядке, или некоторые этапы или последовательности этапов могут быть повторены в итеративном порядке. Этапы могут выполняться или осуществляться, например, с помощью системы для производства изотопов, такой как система 100.
[0072] Способ 450 включает загрузку, на этапе 451, жидкости-мишени в технологическую камеру корпуса мишени. Например, система управления текучей средой может загружать заданный объем жидкости-мишени в технологическую камеру. Указанный объем может составлять, например, от приблизительно 1 мл до приблизительно 3 мл. В некоторых вариантах выполнения способ 450 может включать определение уровня жидкости-мишени внутри технологической камеры. Например, датчик уровня жидкости, такой как датчик 472 уровня жидкости, может содержать источник света (например, лампу накаливания или светоизлучающий диод (LED)) и фотоприемник. Источник света может быть расположен смежно с фотодетектором или напротив него. Когда источник света активирован, фотодетектор может быть выполнен с возможностью обнаружения количества света. Количество света, обнаруженное датчиком 472 уровня жидкости, может изменяться в зависимости от объема, уровня или плотности жидкости внутри технологической камеры. В некоторых вариантах выполнения датчик 472 уровня жидкости может быть детектором плотности. Например, пузырьки могут приводить к пенообразному качеству жидкости, которое обнаруживается датчиком 472 уровня жидкости. Соответственно, данные, полученные датчиком 472 уровня жидкости, могут быть коррелированы с плотностью жидкости и/или могут использоваться для оценки плотности жидкости.
[0073] В некоторых вариантах выполнения способ 450 может включать приложение давления к жидкости-мишени. Давление может быть увеличено за счет подачи инертного газа, такого как гелий или аргон, в технологическую камеру. Давление может быть измерено датчиком давления, таким как датчик 464 давления.
[0074] Способ 450 также включает направление, на этапе 452, пучка частиц, который должен падать на жидкость-мишень в технологической камере корпуса мишени. Как описано в настоящем документе, технологическая камера может содержать область жидкости и область газа. Область газа обычно расположена над областью жидкости (относительно силы тяжести). Пучок частиц отдает относительно большое количество мощности в относительно небольшом объеме жидкости-мишени, вызывая, тем самым, образование пузырьков в области жидкости технологической камеры. Например, пузырьки могут быть сформированы вдоль внутренней поверхности, которая ограничивает технологическую камеру. Внутренние поверхности могут включать, например, внутреннюю поверхность фольги, которая перехватывает пучок частиц и/или внутреннюю поверхность корпуса мишени. Пузырьки также могут быть сформированы в самой области жидкости вдали от внутренних поверхностей.
[0075] На этапе 454 корпус мишени может быть подвержен воздействию вибраций (или встряхиванию), чтобы заставить пузырьки перемещаться из области жидкости в область газа. Например, вибрационное устройство может быть прикреплено к корпусу мишени в определенном месте и активировано, чтобы вызывать вибрации, которые испытываются в технологической камере, как описано в настоящем документе. Вибрационное устройство может быть дискретным компонентом, который прикреплен к поверхности корпуса мишени. Поверхностью может быть наружная поверхность, поверхность, которая ограничивает открытую полость, или поверхность, которая ограничивает замкнутую полость.
[0076] Вибрационное устройство может быть активировано в заданное время. Например, вибрационное устройство может быть активировано, когда ускоритель частиц генерирует пучок частиц, когда пучок частиц падает на материал мишени или в течение заданного периода времени, когда пучок частиц падает на материал мишени. При необходимости, способ может включать обнаружение, на этапе 456, рабочего параметра, который связан с исходной плотностью жидкости-мишени. Например, система управления, такая как система 118 управления (Фиг. 1), может быть функционально связана с одним или несколькими датчиками, которые определяют данные во время работы системы для производства изотопов.
[0077] Данные могут соответствовать одному или нескольким рабочим параметрам или системным параметрам. Рабочий параметр - это параметр, который изменяется во время работы системы и может контролироваться во время работы системы. Например, рабочим параметром может быть ток пучка, температура корпуса мишени, температура фольги, давление внутри технологической камеры, уровень интерфейса между газом и жидкостью, плотность жидкости или время, в течение которого пучок частиц падает на жидкость-мишень. Данные, соответствующие рабочим параметрам, могут быть получены непосредственно с помощью одного или нескольких датчиков или, в качестве альтернативы, могут быть экстраполированы на основании других данных. Системным параметром может быть известная переменная. Например, системным параметром может быть тип жидкости мишени, суммарный объем технологической камеры, суммарный объем жидкости-мишени.
[0078] Система управления может быть с возможностью обмена данными соединена с различными датчиками, преобразователем, детекторами и/или мониторами, такими как описаны в настоящем документе. Данные, соответствующие рабочим и системным параметрам, могут быть использованы для определения или расчета плотности жидкости мишени в технологической камере. Когда определяют, что плотность падает ниже исходного значения, вибрационное устройство может быть активировано. Например, датчик уровня жидкости (или детектор плотности) может передавать сигналы данных, которые указывают состояние, в котором в технологической камере имеется избыточное количество пузырьков. Если определено, что плотность технологической камеры ниже исходного значения, то может быть активировано вибрационное устройство. В качестве другого примера, система 118 управления может обнаруживать ток пучка частиц. Ток пучка может быть обнаружен с помощью электрического контакта, который взаимодействует с корпусом мишени. Когда ток пучка превышает заданный порог, система управления может определить, что плотность слишком низкая и вибрационное устройство может быть активировано. Заданные пороговые значения и исходные значения могут представлять собой известные значения, которые сохраняются системой управления, или могут представлять собой значения, которые рассчитываются системой управления во время работы системы для производства изотопов. Заданный пороговый ток пучка может иметь различные величины, зависящие от системы. В качестве примера, пороговый ток пучка может составлять по меньшей мере 10 мкА, по меньшей мере 20 мкА, по меньшей мере 30 мкА, по меньшей мере 40 мкА, по меньшей мере 50 мкА, по меньшей мере 60 мкА или более. В других вариантах выполнения пороговый ток пучка может составлять по меньшей мере 70 мкА, по меньшей мере 80 мкА, по меньшей мере 90 мкА, по меньшей мере 100 мкА, по меньшей мере 110 мкА, по меньшей мере 120 мкА или более. Однако в других вариантах выполнения пороговый ток пучка может составлять по меньшей мере 150 мкА, по меньшей мере 175 мкА, по меньшей мере 200 мкА, по меньшей мере 225 мкА, по меньшей мере 250 мкА или более.
[0079] В некоторых вариантах выполнения вибрационное устройство не активируется непрерывно в течение длительного периода времени. Вместо этого система управления может активировать вибрационное устройство периодическим (или непериодическим) образом. Активация может быть выполнена с возможностью увеличения плотности жидкости-мишени и может основываться на данных, относящихся к рабочим и системным параметрам. Соответственно, вибрационное устройство может быть активировано на основе обратной связи, относящейся к условиям внутри технологической камеры.
[0080] С этой целью система управления может содержать компоненты, которые включают или представляют собой аппаратные схемы или цепи. Аппаратные схемы или цепи могут содержать один или несколько процессоров, таких как один или несколько компьютерных микропроцессоров или другие логические схемы и/или быть соединены с ними. Операции описанных в настоящем документе способов и системы управления могут быть достаточно сложными, так что операции не могут быть мысленно выполнены обычным человеком или специалистом в данной области техники в коммерчески приемлемый период времени. Аппаратные схемы и/или процессоры системы управления могут использоваться для значительного сокращения времени, необходимого для определения того, когда необходимо активировать вибрационное устройство или определить график активации вибрационного устройства.
[0081] Система управления может быть расположена вместе с системой производства изотопов или может иметь один или несколько компонентов, расположенных дистанционно относительно системы производства изотопов. Система управления может содержать устройство ввода, которое получает вводимые данные от пользователя, и другие данные, используемые для определения того, когда нужно активировать вибрационное устройство.
[0082] В иллюстративном варианте выполнения система управления выполняет набор инструкций, которые хранятся в одном или нескольких элементах хранения, памяти или модулях, чтобы получать и/или анализировать данные, соответствующие рабочим и системным параметрам. Элементы хранения могут быть в виде источников информации или физических элементов памяти в системе управления. Варианты выполнения содержат энергонезависимые машиночитаемые носители, которые содержат набор инструкций для выполнения или осуществления одного или нескольких процессов, изложенных в настоящем документе. Энергонезависимые компьютерно-считываемые носители могут содержать все машиночитаемые носители, за исключением переходных распространяющихся сигналов как таковых. Энергонезависимые считываемые компьютером носители могут включать, как правило, любой осязаемый машиночитаемый носитель, включающий, например, постоянную память, такую как магнитные и/или оптические диски, ПЗУ и ППЗУ и энергозависимую память, такую как ОЗУ. Машиночитаемый носитель может хранить инструкции для выполнения одним или несколькими процессорами.
[0083] Набор инструкций может содержать различные команды, которые инструктируют систему управления выполнять конкретные операции, такие как способы и процессы различных вариантов выполнения, описанных в настоящем документе. Набор инструкций может быть в виде программного обеспечения. Используемые в настоящем документе термины «программное обеспечение» и «прошивка» взаимозаменяемы и включают в себя любую компьютерную программу, сохраненную в памяти для выполнения компьютером, включая оперативную память (RAM), память только для чтения (ROM), память EEPROM и энергонезависимую оперативную память (NVRAM). Вышеупомянутые типы памяти являются только иллюстративными и, таким образом, не ограничивают типы памяти, которые могут использоваться для хранения компьютерной программы.
[0084] Компоненты системы управления могут содержать или представлять собой аппаратные схемы или цепи, которые содержат и/или соединены с одним или несколькими процессорами, такими как один или несколько компьютерных микропроцессоров. Операции описанных в настоящем документе способов и системы управления могут быть достаточно сложными, так что операции не могут быть мысленно выполнены обычным человеком или специалистом в данной области техники в коммерчески приемлемый период времени.
[0085] Программное обеспечение может принимать различные формы, такие как системное программное обеспечение или прикладное программное обеспечение. Кроме того, программное обеспечение может быть представлено в виде набора отдельных программ или программного модуля в рамках большей программы или части программного модуля. Программное обеспечение также может включать модульное программирование в форме объектно-ориентированного программирования. После получения данных данные могут автоматически обрабатываться системой управления, обрабатываться в ответ на команду пользователя или обрабатываться в ответ на запрос, сделанный другой машиной для обработки данных (например, удаленный запрос по линии связи).
[0086] Варианты выполнения, описанные в настоящем документе, не предназначены для ограничения использования радиоизотопов для медицинских целей, но могут также производить другие изотопы и использовать другие материалы мишени. Также различные варианты выполнения могут быть реализованы в связи с различными видами циклотронов, имеющих разные ориентации (например, вертикально или горизонтально ориентированными), а также различные ускорители, такие как линейные ускорители или ускорители, индуцированные лазером, вместо спиральных ускорителей. Кроме того, описанные в настоящем документе варианты выполнения включают способы изготовления систем производства изотопов, систем мишени и циклотронов, как описано выше.
[0087] Следует понимать, что приведенное выше описание предназначено для иллюстрации, а не для ограничения. Например, описанные варианты выполнения (и/или их аспекты) могут использоваться в комбинации друг с другом. Кроме того, может быть выполнено множество модификаций для адаптации конкретной ситуации или материала к объекту изобретения без отхода от его объема. Размеры, типы материалов, ориентации различных компонентов, а также количество и положение различных компонентов, описанных в настоящем документе, предназначены для определения параметров определенных вариантов выполнения и никоим образом не ограничивают и являются просто иллюстративными вариантами выполнения. Многие другие варианты выполнения и модификации в духе и объеме формулы изобретения будут очевидны специалистам в данной области техники после рассмотрения вышеприведенного описания. Следовательно, объем изобретения должен определяться со ссылкой на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, которые охватывает такая формула изобретения. В прилагаемой формуле изобретения термины «в том числе» и «в котором» используются как эквиваленты соответствующих английских терминов «содержащий» и «где». Более того, в последующих пунктах формулы термины «первый», «второй» и «третий» и т.д. используются просто в качестве идентификаторов и не предназначены для наложения численных требований на их объекты. Кроме того, ограничения последующей формулы изобретения не записаны в формате «средство плюс функция» и не предназначены для интерпретации на основе параграфа 112(f) Главы 35 Свода Законов США, если только и до тех пор пока такие ограничения формулы изобретения непосредственно будут использовать фразу «средства для», за которой следует заявление о функции, лишенное дальнейшей конструкции.
[0088] Примеры в этом описании используются для раскрытия различных вариантов выполнения, а также для того, чтобы позволить специалисту на практике использовать различные варианты выполнения, включая создание и использование любых устройств или систем и выполнение любых включенных сюда способов. Объем различных вариантов выполнения ограничен формулой изобретения и может содержать другие примеры, которые будут очевидны для специалистов в данной области техники. Такие другие примеры предназначены для охвата формулы изобретения, если примеры имеют конструктивные элементы, которые не отличаются от буквального языка формулы изобретения, или примеры включают эквивалентные конструктивные элементы с несущественными отличиями от буквального языка формулы изобретения.
[0089] Вышеприведенное описание некоторых вариантов выполнения изобретения будет лучше понято при прочтении в сочетании с прилагаемыми чертежами. В той степени, в которой чертежи иллюстрируют диаграммы функциональных блоков различных вариантов выполнения, эти блоки необязательно указывают на разделение между аппаратной схемой. Таким образом, например, один или несколько функциональных блоков (например, процессоры или запоминающие устройства) могут быть реализованы в одном аппаратном обеспечении (например, процессор сигналов общего назначения, микроконтроллер, оперативное запоминающее устройство, жесткий диск и т.п.). Аналогично, программы могут представлять собой автономные программы, которые могут быть включены в операционную систему в качестве подпрограмм, могут быть функциями в установленном программном пакете или тому подобное. Различные варианты выполнения не ограничиваются механизмами и инструментами, показанными на чертежах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборка мишени и система производства нуклидов | 2018 |
|
RU2769259C2 |
| Технологические сборки и отсоединяемые мишени-сборки для производства изотопов | 2016 |
|
RU2702348C2 |
| МИШЕННАЯ СТАНЦИЯ | 2020 |
|
RU2770241C1 |
| СИСТЕМА ПРОИЗВОДСТВА ИЗОТОПОВ С РАЗДЕЛЕННЫМ ЭКРАНИРОВАНИЕМ | 2010 |
|
RU2543613C2 |
| ИСТОЧНИК ПРОТОНОВ ИЛИ НЕЙТРОНОВ ВЫСОКОЙ ЭНЕРГИИ | 2008 |
|
RU2496285C2 |
| СИСТЕМА НЕЙТРОНОЗАХВАТНОЙ ТЕРАПИИ | 2022 |
|
RU2826774C2 |
| СТЕНД, МОДЕЛИРУЮЩИЙ ТЕПЛОВЫЕ ПРОЦЕССЫ В МИШЕНЯХ ПРИ НАРАБОТКЕ РАДИОИЗОТОПОВ С ПОМОЩЬЮ ИНТЕНСИВНЫХ ПРОТОННЫХ ПУЧКОВ | 2019 |
|
RU2785303C2 |
| СИСТЕМА ПРОИЗВОДСТВА ИЗОТОПОВ И ЦИКЛОТРОН, ИМЕЮЩИЙ УМЕНЬШЕННЫЕ МАГНИТНЫЕ ПОЛЯ РАССЕЯНИЯ | 2010 |
|
RU2521829C2 |
| СИСТЕМА ПРОИЗВОДСТВА ИЗОТОПОВ И ЦИКЛОТРОН | 2010 |
|
RU2526190C2 |
| УСТРОЙСТВО РАСЩЕПЛЕНИЯ ДЛЯ СОЗДАНИЯ НЕЙТРОНОВ | 2001 |
|
RU2280966C2 |
Изобретение относится к системам производства изотопов. Система производства изотопов содержит: ускоритель частиц, выполненный с возможностью генерирования пучка частиц, сборку-мишень, содержащую корпус, имеющий технологическую камеру и резонатор, который расположен смежно с технологической камерой. Технологическая камера выполнена с возможностью удерживать жидкость-мишень, а резонатор расположен с возможностью приема пучка частиц от ускорителя частиц так, чтобы пучок частиц падал в технологическую камеру. Сборка-мишень содержит вибрационное устройство, прикрепленное к корпусу мишени, и систему управления, функционально связанную с ускорителем частиц и сборкой-мишенью. Система управления выполнена с возможностью активации вибрационного устройства в заданное время после генерирования пучка частиц, а вибрационное устройство выполнено с возможностью создавать вибрации, которые испытываются в технологической камере. Система управления выполнена с возможностью активации вибрационного устройства в ответ на определение того, что пучок частиц достиг порогового тока пучка. Изобретение обеспечивает возможность оперативного вибрационного воздействия на образующиеся пузырьки газа для их устранения. 2 н. и 7 з.п. ф-лы, 13 ил.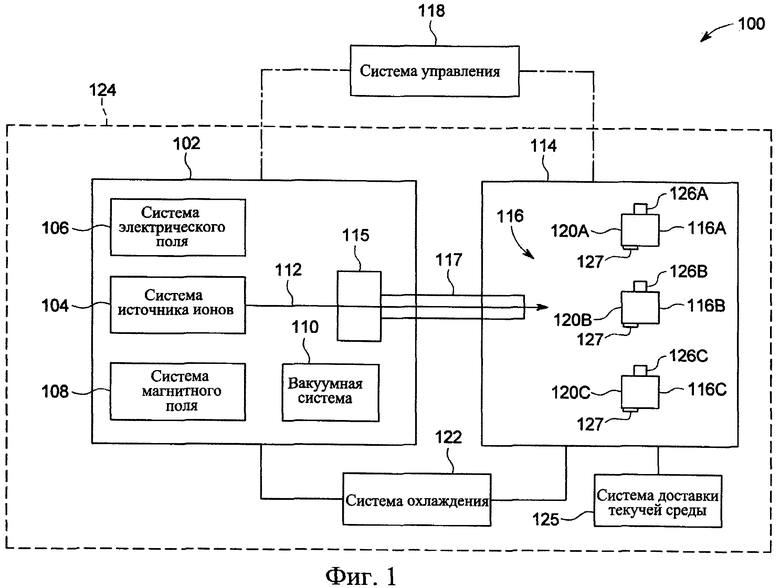
1. Система производства изотопов, содержащая:
ускоритель частиц, выполненный с возможностью генерирования пучка частиц,
сборку-мишень, содержащую корпус, имеющий технологическую камеру и резонатор, который расположен смежно с технологической камерой, причем технологическая камера выполнена с возможностью удерживать жидкость-мишень, а резонатор расположен с возможностью приема пучка частиц от ускорителя частиц так, чтобы пучок частиц падал в технологическую камеру, причем сборка-мишень содержит вибрационное устройство, прикрепленное к корпусу мишени, и
систему управления, функционально связанную с ускорителем частиц и сборкой-мишенью, причем система управления выполнена с возможностью активации вибрационного устройства в заданное время после генерирования пучка частиц, а вибрационное устройство выполнено с возможностью создавать вибрации, которые испытываются в технологической камере,
причем система управления выполнена с возможностью активации вибрационного устройства в ответ на определение того, что пучок частиц достиг порогового тока пучка.
2. Система по п.1, в которой вибрационное устройство выполнено с возможностью работы в диапазоне рабочих частот, причем система управления выполнена с возможностью выбора рабочей частоты вибрационного устройства на основе тока пучка частиц.
3. Система по п.1, в которой корпус мишени содержит первую и вторую части, которые прикреплены друг к другу в заданных положениях относительно друг друга, причем технологическая камера ограничена первой частью корпуса, или второй частью корпуса, или обеими этими частями, и вибрационное устройство прикреплено к первой части корпуса, или ко второй части корпуса, или к обеим этим частям.
4. Система по п.1, в которой вибрационное устройство прикреплено к заданной поверхности корпуса мишени, причем корпус мишени содержит твердый материал, в котором между заданной поверхностью и поверхностью, которая ограничивает технологическую камеру, имеется непрерывный канал.
5. Система по п.1, в которой вибрационное устройство содержит по меньшей мере одно из следующего: (а) пьезоэлектрический привод или (б) электродвигатель.
6. Способ производства радиоизотопов, включающий:
направление потока частиц на жидкость-мишень в технологической камере корпуса мишени, причем технологическая камера содержит область жидкости и область газа, при этом пучок частиц вызывает образование пузырьков в области жидкости технологической камеры, и
обеспечение вибрации корпуса мишени, чтобы заставить пузырьки перемещаться из области жидкости в область газа,
причем указанную вибрацию обеспечивают в ответ на определение того, что пучок частиц достиг порогового тока пучка.
7. Способ по п.6, в котором для обеспечения вибрации корпуса мишени активируют вибрационное устройство, которое прикреплено к корпусу мишени.
8. Способ по п.7, в котором корпус мишени содержит первую и вторую части, которые прикреплены друг к другу в заданных положениях относительно друг друга, причем технологическая камера ограничена первой частью корпуса, или второй частью корпуса, или обеими этими частями, а вибрационное устройство прикреплено к первой части корпуса, или ко второй части корпуса, или к обеим этим частям.
9. Способ по п.7, в котором вибрационное устройство содержит по меньшей мере одно из следующего: (а) пьезоэлектрический привод или (б) электродвигатель.
| WO 2013003039 A1, 03.01.2013 | |||
| Alba-Baena et al "KINETICS OF ULTRASONIC DEGASSING OF ALUMINUM ALLOYS", Light Metals,с.957-962, 2013 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ИСТОЧНИКА ГАММА-ИЗЛУЧЕНИЯ | 1998 |
|
RU2152096C1 |
| Машина для мощения булыжных мостовых | 1951 |
|
SU95166A1 |

