Настоящее изобретение относится к ракетно-космической технике, в частности к области механизмов для удержания трансформируемых механических систем космического аппарата (КА) в сложенном положении.
Из существующего уровня техники известно устройство пирозамок с пирогазовой амортизацией (патент RU 2354923, C1 F42B 15/36, 10.05.2009), содержащий корпус, болт с проточкой, вложенные в проточку сухари, запирающую сухари гильзу, рабочий поршень, промежуточный поршень.
Так же известно устройство для разделения элементов конструкции (патент RU 2441823 CI, B64G 1/64 F42B 15/36, 01.11.2010), содержащее корпус, установленный в одну часть корпуса патронник с пиропатронами и мембрану с хвостовиком, а в другую часть корпуса шток, выступы которого контактируют с выступами вкладышей, проточки которых взаимодействуют с проточками частей корпуса, объединяя их.
Недостатком известных устройств является высокая сложность сборки в виду большого количества деталей, необходимость в специальном обращении с ними в виду использования в их составе пиротехнических элементов и, как следствие, большие габариты и масса.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является устройство удержания и освобождения трансформируемой механической системы (патент ЕР 2298648 F1, B64G 1/64, 23.03.2011) на основе болтового соединения, содержащее в себе штырь, инициирующее устройство освобождающее штырь и уловитель штыря.
Данное устройство принято за прототип заявляемого изобретения.
Прототип имеет ряд недостатков, а именно:
1
- высокая сложность сборки и эксплуатации устройства, связанная с большим количеством деталей;
- необходимость в применении специального оборудования для контровки штыря устройства, в связи с его расположением в глубоком стакане.
Задача, на решение которой направленно заявляемое изобретение заключается в реализации устройства удержания и освобождения трансформируемых механических систем космического аппарата, обеспечивающего:
- более технологически простую схему устройства, по сравнению с прототипом;
- простоту сборки и эксплуатации устройства;
- осуществление контролепригодности, подтверждения факта срабатывания устройства.
Поставленная задача решается за счет того, что устройство удержания и освобождения трансформируемых механических систем КА содержит замок состоящий из корпуса, рычажного механизма обеспечивающего малое число деталей, компактность и не требует дополнительного специального оборудования для выполнения операций с ним, что обеспечивает более технологически простую схему устройства, отделяемой части состоящей из двух шайб, обеспечивающих интерфейс с отделяемым или трансформируемым элементом конструкции, установленных на силовую воронку через сферический подшипник, что обеспечивает развязку для компенсации монтажных напряжений между устройством и удерживаемым им элементом. Так же устройство конструктивно обеспечивает свободный доступ к штырю замка, что обеспечивает простоту сборки, и эксплуатации устройства. Кроме этого устройство дополнительно снабжено датчиком с микропереключателями и фиксатором, что обеспечивает контролепригодность устройства.
Изобретение поясняется чертежами:
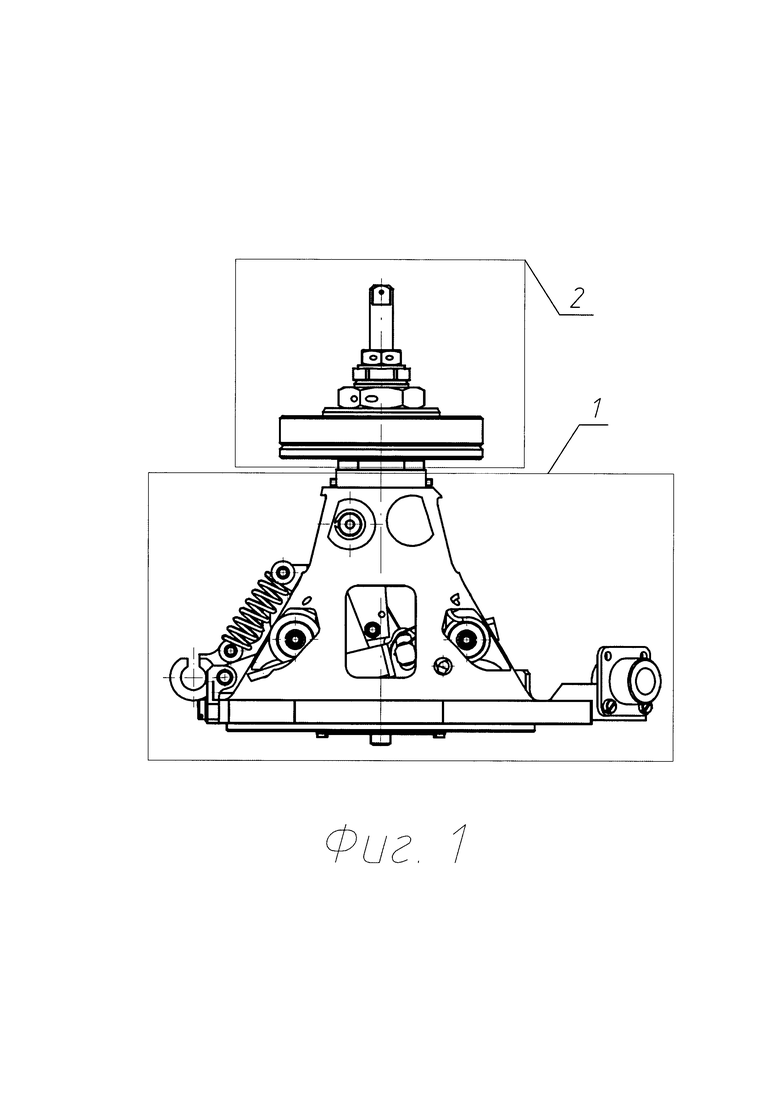
- на фиг. 1 показан общий вид устройства до срабатывания;
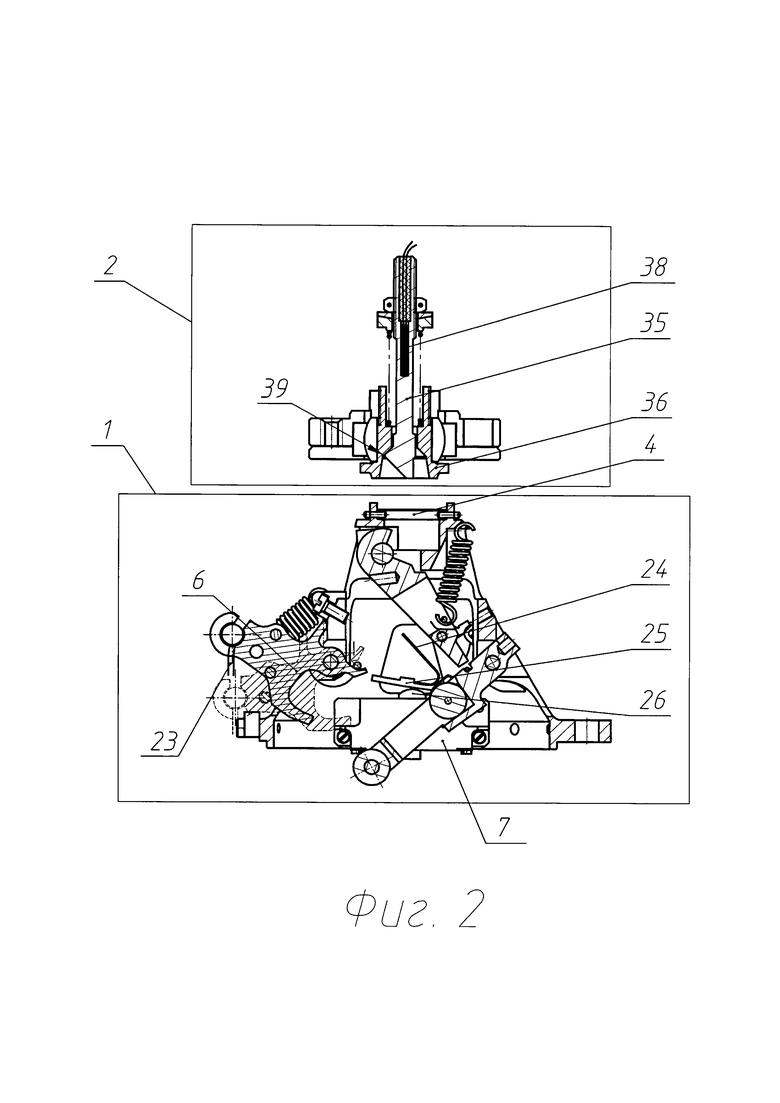
- на фиг. 2 показан общий вид устройства после срабатывания;
- на фиг. 3 показан разрез замка через осевую линию;
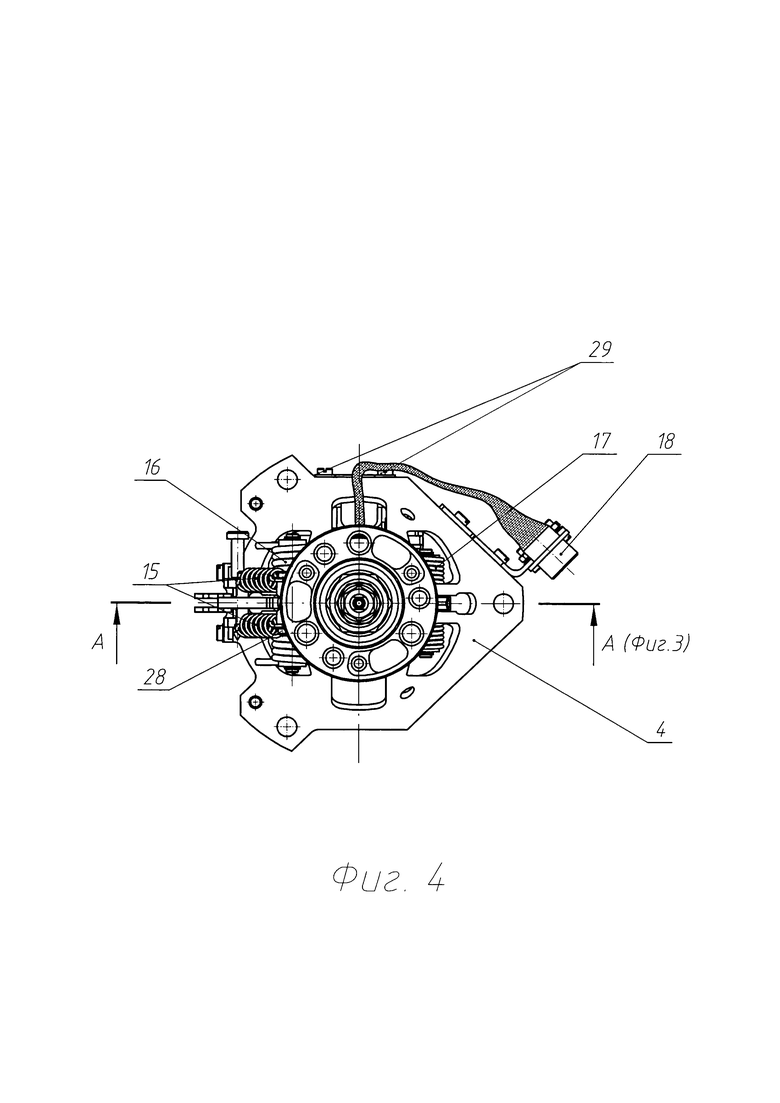
- на фиг. 4 показан общий вид устройства;
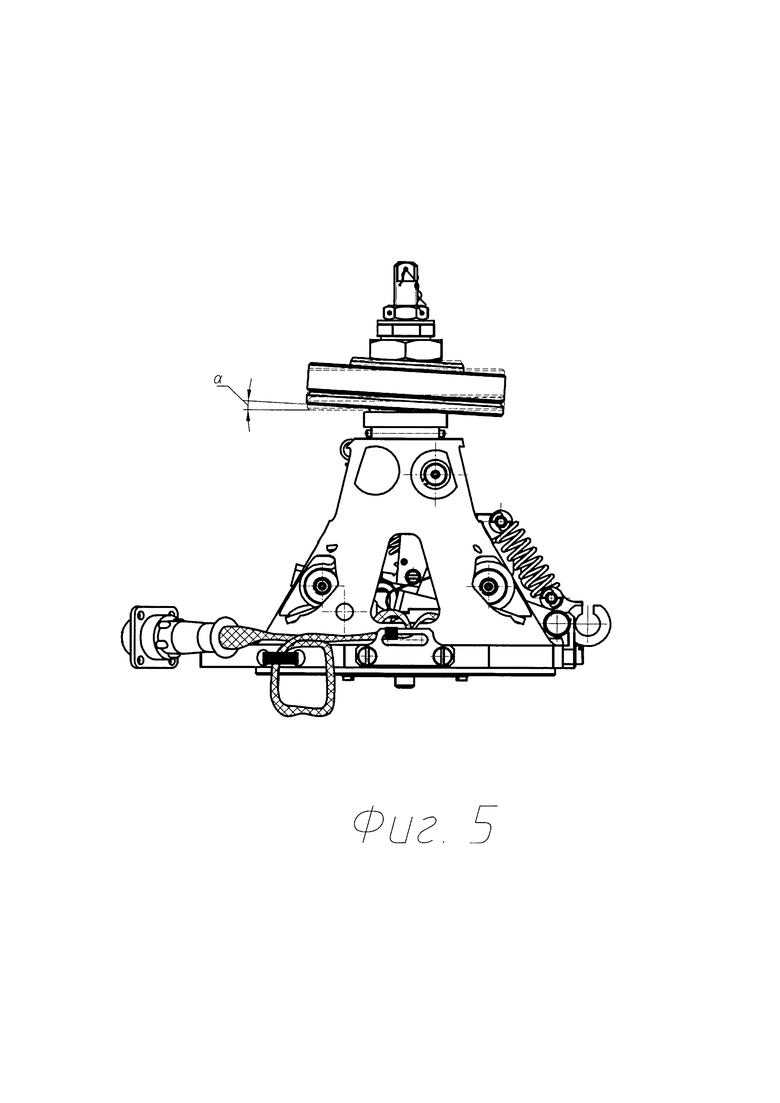
- на фиг. 5 показан угол прокачивания а шайб 30.
Устройство удержания состоит из стационарной части 1 и отделяемой части 2.
Стационарная часть 1 состоит из рычага 3, корпуса 4, рычага 5, кронштейна 6, датчика 7, ролика 8, ролика 9, оси 10, оси 11, оси 12, оси 13, оси 14, пружин 15, пружины 16, пружины 17, разъема 18, кронштейна 19, пружины 20, винтов 21, рессоры 22, удерживающего элемента 23, пружины 24, кронштейна 25, штока 26, винтов 27, оси 28, винтов 29.
Отделяемая часть 2 состоит из шайб 30, подшипника 31, пружины 32, шайб 33, гайки 34, штыря 35, воронка 36, гайки 37, тензорезисторного датчика 38.
Стационарная часть предназначена для закрепления устройства удержания на корпусе КА и размещения в ней рычажного механизма состоящего из рычагов 3 и 5, соединенных между собой через ролик 9, а отделяемая часть предназначена для закрепления на отделяемой или трансформируемой части КА, а так же для компенсации монтажных напряжений за счет возможности прокачивания шайб 30 в подшипнике 31 на угол α (см. фиг. 5) и контроля усилия затяжки в стыковочной поверхности с помощью тензорезисторного датчика 38.
Угол α обеспечивает развязку для компенсации монтажных напряжений между устройством и удерживаемым им элементом. Величина угла обуславливается геометрическими параметрами шайб 30 и подшипника 31.
Тензорезисторный датчик 38 представляет собой чувствительный тензометрический элемент, устанавливаемый в штыре устройства в зоне его максимального растяжения, что позволяет контролировать фактическое значение нагрузки в стыковочной поверхности устройства.
Стационарная и отделяемая части устройства стягиваются между собой по стыковочной поверхности гайкой 34 через штырь 35.
Срабатывание устройства удержания происходит следующим образом: после того, как рычажный механизм был расфиксирован удерживающим элементом 23, кронштейн 6 поворачивается в сторону срабатывания под действием пружин 15 и 16. Ролик 8 прокатывается по кронштейну 6, освобождая рычаг 5. Рычаг 5 под действием пружины 17 и выталкивающей силы, преходящей на него через ролик 9, от рычага 3 поворачивается и освобождает рычаг 3. Рычаг 3 поворачиваясь, освобождает фиксатор, состоящий из пружины 24 и кронштейна 25. В этот момент шток 26 датчика 7 поднимает, ранее фиксировавший его кронштейн 25, за счет чего происходит срабатывание датчика 7, подтверждающего факт срабатывания замка. После того как рычаг 3 освобожден, он освобождает штырь 35. Штырь 35 под действием силы от пружины 32 вытягивается из воронки 36, после чего происходит разделение по стыковочной поверхности отделяемой части от стационарной.
Датчик 7 представляет собой устройство, состоящее из подпружиненного штока 26, при зажатии или отпускании которого происходит замыкание контактов входящих в его состав микропереключателей или их размыкание.
Взведение и нагружение устройства удержания после срабатывания выполняется в следующей последовательности:
- оголовок штыря 35 должен заходить в зев корпуса 4 вдоль его продольной оси до упора, при этом выступ 39 на штыре должен быть сориентирован в сторону кронштейна 6;
- во взведенном состоянии штырь 35 должен находиться в зацеплении с рычагом 3, рычаг 3 с рычагом 5 через ролик 9, кронштейн 6 с рычагом 5 через ролик 8, при этом для взведения использовать отверстия 40 и 41;
- установить оставшиеся детали отделяемой части и затянуть гайку 34 необходимым моментом.
Технический результат заключается в применении:
- рычажного механизма, обеспечивающего малое число деталей, компактность и не требующего дополнительного специального оборудования для выполнения операций с ним, что обеспечивает более технологически простую схему устройства;
- конструктивной схемы устройства, обеспечивающей свободный доступ к штырю замка, что, в свою очередь, обеспечивает простоту сборки и эксплуатации устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УДЕРЖАНИЯ И ОСВОБОЖДЕНИЯ ТРАНСФОРМИРУЕМЫХ МЕХАНИЧЕСКИХ СИСТЕМ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2669246C1 |
| УСТРОЙСТВО УДЕРЖАНИЯ ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2686804C1 |
| УСТРОЙСТВО УДЕРЖАНИЯ И ОСВОБОЖДЕНИЯ РАСКРЫВАЕМЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2619497C2 |
| Механическое устройство фиксации шарнирно соединенных элементов конструкций | 2023 |
|
RU2794931C1 |
| ДЕРЖАТЕЛЬ | 2013 |
|
RU2558960C2 |
| МЕХАНИЧЕСКИЙ РЫЧАЖНЫЙ ЗАМОК (ВАРИАНТЫ) | 2013 |
|
RU2562467C2 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ СФЕРИЧЕСКОЙ ФОРМЫ | 2003 |
|
RU2276046C2 |
| Замковое устройство для трансформируемых элементов конструкций космического аппарата | 2023 |
|
RU2821613C1 |
| ПЛАТФОРМА ПОВОРОТНАЯ ДЛЯ КРЕПЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2003 |
|
RU2238888C1 |
| УСТРОЙСТВО РАССТЫКОВКИ РАКЕТНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2020 |
|
RU2759371C1 |

Изобретение относится к области космической техники, а более конкретно к механизмам для удержания трансформируемых механических систем в сложенном положении. Устройство удержания и освобождения трансформируемых механических систем космического аппарата содержит стационарную и отделяемую части, стянутые штырем. Устройство дополнительно снабжено тензорезистивным датчиком, датчиком с микропереключателями и фиксатором. Штырь удерживается рычажным механизмом. Достигается упрощение в сборке. 5 ил.
Устройство удержания и освобождения трансформируемых механических систем космического аппарата, содержащее стационарную и отделяемую части, стянутые между собой штырем, отличающееся тем, что устройство дополнительно снабжено тензорезистивным датчиком, датчиком с микропереключателями и фиксатором, а штырь удерживается рычажным механизмом.
| RU 2015134193 А, 17.02.2017 | |||
| Устройство для измерения осевого усилия в крепежных деталях | 1988 |
|
SU1679077A1 |
| Устройство для компрессионных испытаний грунтов | 1989 |
|
SU1788144A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНТЕРВАЛА И КАЧЕСТВА ПЕРФОРАЦИИ ОБСАДНОЙ КОЛОННЫ В СКВАЖИНЕ | 2005 |
|
RU2298648C1 |

