Область техники
Настоящее изобретение относится к регулированию эжектирующего потока через аспиратор, связанный с системой двигателя.
Уровень техники и раскрытие изобретения
В состав систем транспортных средств могут входить различные устройства - потребители разрежения, приводимые в действие разрежением. В их число могут входить, например, усилитель тормозов, канистра улавливания топливных паров и т.п. Потребляемое этими устройствами разрежение может создавать специальный вакуумный насос. В других вариантах в системе двигателя могут быть установлены один или несколько аспираторов (также именуемых «эжекторы», «насосы Вентури», «насосы-эжекторы» и «эдукторы»), способных управлять потоком воздуха в системе двигателя и использовать его для создания разрежения.
Поскольку аспираторы относятся к пассивным устройствам, они обеспечивают низкозатратное создание разрежения при их применении в системах двигателей. Величину разрежения, создаваемого на аспираторе, можно регулировать путем регулирования расхода эжектирующего потока воздуха через аспиратор. Несмотря на то, что аспираторы могу создавать разрежение дешевле и эффективнее, чем вакуумные насосы с электроприводом или приводом от двигателя, их применение во впускных системах двигателя традиционно ограничивалось как необходимостью наличия во впускном коллекторе разрежения, которое можно было бы использовать, так и максимальным расходом воздуха в обход дросселя. Ряд решений по устранению этой проблемы включают установку клапана последовательно с аспиратором или встраивание клапана в конструкцию аспиратора. Такие клапаны можно обозначать терминами «отсечные клапаны аспиратора» ОКА (ASOVs) или «регулирующие клапаны аспиратора» РКА (ACVs). Степень открытия такого клапана регулируют для регулирования расхода эжектирующего потока воздуха через аспиратор и, следовательно, величины разрежения, создаваемого аспиратором. Регулируя степень открытия клапана, можно изменять расход воздуха через аспиратор и расход всасываемого воздуха, регулируя, таким образом, создание разрежения в зависимости от изменения параметров работы двигателя, например, давления во впускном коллекторе.
Один пример решения для управления отсечным клапаном аспиратора (ОКА) в двигателе представлен Хироока (Hirooka) в US 8,360,739. ОКА можно открывать или закрывать в зависимости от значения одного или нескольких из следующих параметров: температуры хладагента двигателя, температуры всасываемого воздуха и частоты вращения холостого хода. Авторы настоящего изобретения выявили потенциальный недостаток примера решения, предложенного Хироока. Например, параметры работы двигателя могут быть изменены в случае обнаружения неисправности двигателя. Так, контроллер может отрегулировать параметры работы двигателя, изменив их, в случае обнаружения неисправности компонента и (или) двигателя. В этом случае, регулирование ОКА в зависимости от температуры хладагента двигателя, температуры всасываемого воздуха, частоты вращения двигателя и т.п.может негативно сказаться на работе двигателя с измененными параметрами, поскольку эжектирующий поток через аспиратор может повлиять на подачу воздуха в двигатель. Точнее, алгоритмы управления ОКА, применяемые во время устойчивой работы двигателя, могут оказаться непригодны при работе двигателя с измененными параметрами после обнаружения неисправности компонента и (или) двигателя.
Авторы настоящего изобретения определили решение, позволяющее устранить вышеуказанный недостаток как минимум частично. Соответственно, предложен пример способа для двигателя, содержащий закрытие регулирующего клапана аспиратора РКА (ACV) в случае диагностирования первого условия неисправности двигателя и открытие РКА в случае диагностирования второго условия неисправности двигателя, при этом второе условие неисправности двигателя отличается от первого условия неисправности двигателя. Таким образом, РКА можно регулировать различным образом в зависимости от типа условия неисправности двигателя.
Например, двигатель может содержать аспиратор для пассивного создания разрежения. В одном примере аспиратор в безнаддувном двигателе может быть установлен в обводном канале дросселя параллельно впускному дросселю во впускном канале. В другом варианте осуществления двигатель может представлять собой двигатель с наддувом, содержащий компрессор, причем аспиратор можно установить в байпасной магистрали компрессора. Эжектирующий поток через аспиратор можно регулировать с помощью регулирующего клапана аспиратора (РКА). Контроллер может переключать РКА из открытого положения в закрытое и обратно в зависимости от частоты вращения двигателя, когда не выявлены никакие неисправности двигателя или его компонентов. При обнаружении условия неисправности двигателя контроллер может изменить параметры работы двигателя для обеспечения его надежной работы при наличии условия неисправности двигателя. Кроме того, положение РКА можно регулировать в зависимости от изменений режима работы двигателя. Например, РКА можно закрыть (из открытого положения), если будет выявлено первое условие неисправности двигателя. В этом случае, изменение режима работы двигателя при обнаружении первого условия неисправности двигателя может содержать повышение степени разрежения во впускном коллекторе. Примером первого условия неисправности двигателя служит неисправность датчика массового расхода воздуха. В случае выявления второго условия неисправности двигателя, контроллер может переключить РКА в более открытое положение (из более закрытого). В этом случае, изменение режима работы двигателя при обнаружении второго условия неисправности двигателя может содержать снижение степени разрежения во впускном коллекторе. Примером второго условия неисправности двигателя служит заклинивание дросселя в открытом положении.
Итак, расход эжектирующего потока через аспиратор можно регулировать в зависимости от типа условия неисправности двигателя. После обнаружения неисправности двигателя регулирование РКА может не зависеть от таких параметров, как частота вращения двигателя, температура хладагента, температура каталитического нейтрализатора и т.п. Следовательно, алгоритм управления РКА в режиме работы двигателя, измененном после обнаружения неисправности двигателя, может отличаться от алгоритма управления РКА при работе двигателя в отсутствии условий неисправности. Изменяя положение РКА в зависимости от типа неисправности двигателя, работу двигателя в желаемом режиме можно продолжить без негативного влияния чрезмерного расхода воздуха через аспиратор. В целом, можно обеспечить надежную работу двигателя при наличии условий неисправности двигателя.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание фигур чертежей
На ФИГ. 1А схематически изображена система безнаддувного двигателя, содержащая аспиратор.
На ФИГ. 1В схематически изображена система двигателя с наддувом, содержащая аспиратор.
На ФИГ. 2 изображен пример компоновки системы транспортного средства с гибридным приводом.
На ФИГ. 3 представлена структурная схема высокого уровня, иллюстрирующая алгоритм управления работой отсечного клапана аспиратора (ОКА), содержащегося в системах двигателей на ФИГ. 1А и 1В, согласно настоящему изобретению.
На ФИГ. 4 изображен пример структурной схемы алгоритма определения наличия подходящих условий для открытия ОКА.
На ФИГ. 5 представлен пример структурной схемы алгоритма определения положения ОКА в системе транспортного средства с гибридно-электрической силовой установкой ТСГЭСУ (HEV) согласно раскрытому в настоящей заявке изобретению.
На ФИГ. 6 представлен пример структурной схемы алгоритма определения, находится ли частота вращения двигателя в диапазоне, необходимом для открытия ОКА.
На ФИГ. 7 представлен пример структурной схемы алгоритма проверки на предмет изменения параметров работы двигателя, требующего изменения положения ОКА.
На ФИГ. 8 представлен пример структурной схемы алгоритма контроля температуры ОКА.
На ФИГ. 9 представлен пример структурной схемы алгоритма определения силы и напряжения тока, который должен быть подан на ОКА для его срабатывания.
На ФИГ. 10 (включая ФИГ. 10А и 10В) представлен пример структурной схемы алгоритма определения положения ОКА в зависимости от имеющего место условия неисправности двигателя.
На ФИГ. 11 представлен пример управления ОКА в зависимости от частоты вращения двигателя и температуры ОКА согласно настоящему изобретению.
На ФИГ. 12 представлен пример управления ОКА в зависимости от изменения давления во впускном коллекторе.
На ФИГ. 13 представлен пример управления ОКА в зависимости от выявленного условия неисправность двигателя.
На ФИГ. 14 представлен пример управления ОКА в составе системы ТСГЭСУ, изображенной на ФИГ. 2.
Осуществление изобретения
Нижеследующее описание осуществления изобретения относится к способам и системам (вариантам) создания разрежения аспиратором, связанным с системой двигателя, например, с системой безнаддувного двигателя на ФИГ. 1А и системой двигателя с наддувом на ФИГ. 1В. Система двигателя может входить в состав транспортного средства с гибридно-электрической силовой установкой (ТСГЭСУ), такого как система транспортного средства с гибридно-электрической силовой установкой на ФИГ. 2. Создание разрежения на аспираторе можно регулировать отсечным клапаном аспиратора (ОКА), установленным выше или ниже по потоку от аспиратора. Следовательно, ОКА можно открывать в той или иной степени для регулирования эжектирующего потока через аспиратор, и, следовательно, величины разрежения, создаваемого аспиратором. Контроллер может быть выполнен с возможностью реализации одного или нескольких алгоритмов управления, таких как примеры алгоритмов, представленные на ФИГ. 3-10, для открытия или закрытия ОКА в зависимости от параметров работы двигателя (ФИГ. 3 и 4), например, частоты вращения двигателя (ФИГ. 6), температуры ОКА (ФИГ. 8), которая может зависеть от силы и напряжения тока, подаваемого на ОКА (ФИГ. 9), и параметров работы двигателя в системе ТСГЭСУ (ФИГ. 5). Причиной установки ОКА в то или иное положение может быть изменение параметров работы двигателя (ФИГ. 7). Кроме того, контроллер может изменять положение ОКА в случае выявления условий неисправности двигателя (ФИГ. 10). Примеры изменения положения ОКА раскрыты со ссылками на ФИГ. 11-14.
Обратимся к ФИГ. 1А, на которой схематически изображен двигатель 10 внутреннего сгорания с искровым зажиганием. Вариант осуществления двигателя 10 на ФИГ. 1А содержит безнаддувный двигатель и не содержит нагнетательное устройство. Двигатель 10 содержит несколько цилиндров, один из которых - цилиндр 30 (также известный как «камера сгорания» 30) - показан на ФИГ. 1А.
Цилиндр 30 двигателя 10 может содержать стенки 32 камеры сгорания с расположенным между ними поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращение коленчатого вала. Коленчатый вал 40 может быть соединен с как минимум одним ведущим колесом транспортного средства через промежуточную систему передачи (не показана). Кроме того, для обеспечения запуска двигателя 10, с коленчатым валом 40 может быть соединен стартер через маховик (не показан).
Всасываемый воздух может поступать в камеру 30 сгорания из впускного коллектора 46 через впускной канал 42, а отработавшие газы могут выходить через выпускной коллектор 48 и выпускной канал 19. Впускной коллектор 46 и выпускной коллектор 48 могут избирательно сообщаться с камерой 30 сгорания через впускной клапан 52 и выпускной клапан 54 соответственно. В некоторых вариантах камера 30 сгорания может содержать два и более впускных клапана и (или) два и более выпускных клапана.
В данном примере, впускной клапан 52 и выпускной клапан 54 могут приводиться в действие системами 51 и 53 кулачкового привода соответственно. Системы 51 и 53 кулачкового привода могут содержать один или несколько кулачков и могут быть выполнены с возможностью выполнения одной или нескольких из следующих функций:
переключение профиля кулачков ППК (CPS), изменение фаз кулачкового распределения ИФКР (VCT), изменение фаз газораспределения ИФГ (WT) и (или) изменение высоты подъема клапанов ИВПК (VVL), которыми может управлять контроллер 12 для регулирования работы клапанов. Угловое положение кулачковых валов впускных и выпускных клапанов можно определять с помощью датчиков 55 и 57 положения соответственно. Так, положение кулачка впускного клапана может определять датчик 55 положения, а положение кулачка выпускного клапана - датчик 57 положения.
В других вариантах впускной клапан 52 и (или) выпускной клапан 54 могут быть электроприводными. Например, цилиндр 30 может содержать впускной клапан с электроприводом и выпускной клапан с кулачковым приводом, включая ППК и (или) ИФКР.
Топливная форсунка 66 показана соединенной непосредственно с камерой 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса впрыска топлива ИВТ (FPW), полученного от контроллера 12 через электронный драйвер 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно как «непосредственный впрыск топлива» в камеру 30 сгорания. Топливная форсунка может быть установлена, например, сбоку или сверху от камеры сгорания. Топливо можно подавать в топливную форсунку 66 по топливной системе (не показана на ФИГ. 1А), содержащей топливный бак, топливный насос и топливную рампу. В некоторых вариантах осуществления камера 30 сгорания, вместо указанной форсунки или в дополнение к ней, может содержать топливную форсунку, установленную во впускном коллекторе 46 с возможностью обеспечения того, что известно как «впрыск топлива во впускной канал» выше по потоку от камеры 30 сгорания.
Система 88 зажигания может подавать искру зажигания в камеру 30 сгорания с помощью свечи 92 зажигания по сигналу опережения зажигания ОЗ (SA) от контроллера 12 в определенных режимах работы. Несмотря на то, что на фигуре показаны компоненты искрового зажигания, в некоторых вариантах осуществления камера 30 сгорания, либо еще одна или несколько камер сгорания двигателя 10, могут работать в режиме воспламенения от сжатия, с искрой зажигания или без нее.
Впускной коллектор 46 показан связанным с впускным дросселем 62, содержащим дроссельную заслонку 64. В данном конкретном примере положение дроссельной заслонки 64 может изменять контроллер 12, направляя сигнал на электродвигатель или привод в составе дросселя 62; данную конфигурацию обычно называют «электронное управление дроссельной заслонкой» ЭУДЗ (ETC). Впускной дроссель 62 выполнен с возможностью регулировать поток воздуха из впускного канала 42 во впускной коллектор 46 и камеру 30 сгорания среди прочих цилиндров двигателя. Контроллер 12 может получать информацию о положении дроссельной заслонки 64 в виде сигнала положения дросселя ПД (TP) от датчика 58 положения дросселя. Впускной канал 42 может содержать датчик 120 массового расхода воздуха и датчик 121 барометрического давления для направления сигналов МРВ (MAF) и БД (BP) в контроллер 12. Датчик 121 барометрического давления также может быть выполнен в виде датчика температуры/давления с возможностью измерения температуры всасываемого воздуха ТВВ (IAT) и барометрического давления БД (BP).
Кроме того, в изображенном примере система рециркуляции отработавших газов РОГ (EGR) может направлять необходимое количество отработавших газов из выпускного канала 19 во впускной коллектор 46 по тракту 82 РОГ. Подачу отработавших газов рециркуляции может регулировать контроллер 12 с помощью клапана 80 РОГ. При подаче отработавших газов в двигатель 10, количество кислорода для сжигания топлива уменьшается, вследствие чего снижается температура пламени сжигания и образование, например, NOx.
Канал 78 принудительной вентиляции картера ПВК (PCV) может соединять картер (не показан) с впускным коллектором 46 для контролируемого удаления газов из картера. Кроме того, топливные пары из канистры улавливания топливных паров (не показана) можно удалять продувкой во впускной коллектор 46 по каналу 76 продувки канистры улавливания топливных паров, соединяющему ее с впускным коллектором.
Датчик 126 отработавших газов показан установленным в выпускной канал 19 выше по потоку от устройства 70 снижения токсичности отработавших газов. Датчик 126 отработавших газов может представлять собой датчик любого типа, подходящего для получения показаний воздушно-топливного отношения в отработавших газах, например: линейный датчик кислорода или УДКОГ (UEGO) (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или ДКОГ (EGO), НДКОГ (HEGO) (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. Устройство 70 снижения токсичности отработавших газов показано установленным вдоль выпускного канала 19 ниже по потоку от датчика 126 отработавших газов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор ТКН (TWC), накопитель оксидов азота, устройство снижения токсичности отработавших газов какого-либо иного типа или их комбинацию. Кислородный датчик 79 показан подключенным к выводящей трубе 77 ниже по потоку от устройства 70 снижения токсичности отработавших газов. Содержание кислорода в устройстве 70 снижения токсичности отработавших газов можно определить по показаниям датчика 126 отработавших газов и кислородного датчика 79.
Аспиратор 20 можно установить в канале 23 (в настоящем описании также именуемом «впускной канал 23 перепускаемого воздуха» или «обводной канал 23 дросселя») параллельно впускному дросселю 62. Канал 23 может быть параллелен впускному каналу 42, как показано на ФИГ. 1А, и может отводить часть всасываемого воздуха, поступившего из области ниже по потоку от воздухоочистителя 133, во впускной коллектор 46 через аспиратор 20. Часть воздуха, отводимая из зоны выше по потоку от впускного дросселя 62, может течь в первый конец 25 канала 23, через аспиратор 20, и вытекать во впускной коллектор 46 ниже по потоку от впускного дросселя 62 на втором конце 26 канала 23. Поток воздуха через аспиратор 20 создает область низкого давления в аспираторе 20, создавая, таким образом, источник разрежения для вакуум-бачков и устройств-потребителей разрежения, например: канистр улавливания топливных паров, усилителей тормозов и т.п. Таким образом, аспираторы (которые также могут именоваться «эжекторы», «устройства Вентури», «насосы-эжекторы» и «эдукторы») представляют собой пассивные устройства-источники разрежения с возможностью низкозатратного создания разрежения при использовании их в системах двигателей. Величина создаваемого разрежения может зависеть от расхода эжектирующего потока воздуха через аспиратор 20. Отсечной клапан 74 аспиратора (ОКА) может быть установлен в канале 23 ниже по потоку от аспиратора 20, как показано на ФИГ. 1А. В другом варианте ОКА 74 может быть установлен выше по потоку от аспиратора 20. В других вариантах осуществления ОКА 74 может быть выполнен за одно целое с аспиратором 20 (например, клапан можно расположить в горловине аспиратора). ОКА 74 также можно обозначать термином «регулирующий клапан 74 аспиратора» или «РКА 74».
ОКА 74 можно активно управлять для пропуска или перекрытия эжектирующего потока через аспиратор (если ОКА является двухпозиционным) или для уменьшения (увеличения) расхода через аспиратор (если ОКА является бесступенчато-регулируемым). Таким образом, регулируя степень открытия ОКА 74, можно изменять расход эжектирующего потока через аспиратор 20 и регулировать величину разрежения на горловине аспиратора для удовлетворения потребностей двигателя в разрежении.
ОКА 74 может быть электроприводным с возможностью установки в то или иное положение с помощью контроллера 12 в зависимости от режима работы двигателя. В одном примере ОКА 74 может быть электромагнитным. В этом случае, ОКА можно приводить в действие электрическим током. Нормальным положением ОКА 74 может быть закрытое (или полностью закрытое) при отсутствии подачи тока на электроприводной ОКА. Соответственно, ОКА можно перевести из нормального положения в другое (например, открыть ОКА 74) можно, подав на него ток ОКА. Как будет раскрыто со ссылкой на ФИГ. 9, значения силы и напряжения тока, необходимых для срабатывания ОКА, можно определять, исходя из температуры воздуха под капотом.
В других вариантах ОКА может быть пневмоприводным (например, вакуумным) клапаном; в этом случае, источником разрежения для срабатывания клапана может быть впускной коллектор, и (или) вакуум-бачок, и (или) другие источники низкого давления в системе двигателя. В вариантах осуществления с пневмоприводным ОКА, управлять ОКА можно без участия блока управления силовым агрегатом (например, управление ОКА может быть пассивным в зависимости от уровня давления (разрежения) в системе двигателя).
Независимо от того, является ли ОКА 74 электроприводным или вакуумным, он может быть либо двухпозиционным (например, двухходовым), либо бесступенчато-регулируемым. Двухпозиционные клапаны можно устанавливать либо в полностью открытое, либо в полностью закрытое положение, при этом полностью открытым положением двухпозиционного клапана является такое, при котором клапан никак не ограничивает поток, а полностью открытым является такое положение, в котором двухпозиционный клапан полностью блокирует поток, не позволяя ему проходить через клапан. В отличие от них, бесступенчато-регулируемые клапаны можно открывать частично с изменяемой степенью. Варианты осуществления с бесступенчато-регулируемым ОКА могут обеспечить повышенную маневренность регулирования расхода эжектирующего потока через аспиратор, однако их недостатком является то, что они гораздо дороже двухпозиционных клапанов. В других примерах ОКА 74 может представлять собой задвижку, поворотный дисковый затвор, тюльпанообразный клапан или клапан иного подходящего типа.
ОКА 74 можно устанавливать в то или иное положение (например, открытое или закрытое) в зависимости от различных параметров работы двигателя, как будет раскрыто ниже в настоящем описании со ссылками на ФИГ. 3-14. С ОКА 74 может быть функционально связан контроллер 12 для переключения ОКА 74 из открытого положения в закрытое и обратно (или, в случае бесступенчато-регулируемого клапана, для установки его в то или иное промежуточное положение). В первом примере контроллер может приводить ОКА в действие в зависимости от уровня разрежения в какой-либо вакуумной емкости, например, усилителе тормозов. Например, процесс создания разрежения с помощью аспиратора можно инициировать, установив ОКА в открытое положение, когда уровни разрежения в усилителе тормозов ниже пороговых. Во втором примере положение ОКА можно регулировать в зависимости от необходимого расхода воздуха во впускной системе двигателя. А именно, ОКА можно закрыть, когда расход подачи воздуха во впускной коллектор больше желаемого, что может привести к избыточному впрыску топлива. Раскрытые выше примеры управления ОКА могут подходить для работы двигателя в штатном режиме, однако они не могут в достаточном объеме обеспечить проведение проверки аспиратора и ОКА в процессе контроля состава отработавших газов. Это связано с тем, что, если управление ОКА осуществляют в зависимости от уровня разрежения в усилителе тормозов или необходимого расхода воздуха во впускной системе, ОКА нельзя будет привести в действие во время контроля состава отработавших газов и (или) диагностики ОКА.
Учитывая вышеизложенное, в настоящей заявке раскрыты способы управления ОКА, предусматривающие регулирование ОКА как минимум частично в зависимости от частоты вращения двигателя. Например, контроллер может направить команду на открытие ОКА 74 (из закрытого положения), когда частота вращения двигателя находится между первым, нижним, и вторым, верхним, значением. Если ОКА открывают в зависимости от частоты вращения двигателя, риски того, что эжектирующий поток через эжектор может привести к превышению необходимого расхода потока воздуха, снижаются (например, сводятся к минимуму). Поскольку расход потока воздуха свыше необходимого приводит к избыточному впрыску топлива, регулирование расхода воздуха с помощью ОКА может повысить эксплуатационные показатели двигателя и топливную экономичность. Если положение ОКА регулируют в зависимости от частоты вращения двигателя, то можно также обеспечить возможность приведения ОКА в действие при проведении контроля состава отработавших газов. Таким образом, можно одновременно обеспечить возможность диагностики ОКА (и аспиратора) и оценки влияния ОКА (и аспиратора) на токсичность отработавших газов транспортного средства.
Если ОКА является электроприводным, контроллер также может управлять его срабатыванием в зависимости от температуры ОКА. Например, ОКА можно закрыть (из открытого положения), когда температура ОКА превысит пороговую. В еще одном примере можно использовать другой алгоритм управления для регулирования положения ОКА при выявлении условий неисправности двигателя. Для транспортного средства с гибридно-электрической силовой установкой можно использовать модифицированный способ управления.
На ФИГ. 1А показано, что разрежение, создаваемое аспиратором 20, можно подавать в вакуум-бачок 138 и тормозной вакуум-бачок 184 (также обозначаемый термином «тормозной гидроаккумулятор» 184) в составе усилителя 140 тормозов. Вакуум-бачок 138 выполнен с возможностью приема разрежения по каналу 73 через первый контрольный клапан 63, расположенный в первой трубе 93. Первый контрольный клапан 63 пропускает поток воздуха из вакуум-бачка 138 к аспиратору 20 и блокирует поток воздуха из аспиратора 20 к вакуум-бачку 138. Датчик 125 выполнен с возможностью оценки величины давления (или разрежения) в вакуум-бачке 138. Следовательно, датчик 125 может представлять собой датчик давления или датчик разрежения. Несмотря на то, что в раскрытом варианте осуществления первый контрольный клапан 63 показан как отдельный клапан, в других вариантах осуществления аспиратора, контрольный клапан 63 можно встроить в аспиратор. Тормозной гидроаккумулятор 184 выполнен с возможностью получения разрежения, создаваемого аспиратором 20, по каналу 73 через второй контрольный клапан 94, установленный во второй трубе 65. Располагаемое давление в тормозном гидроаккумуляторе 184 можно оценивать с помощью датчик 127 разрежения (или датчика 127 давления). Следовательно, контроллер 12 может получать значения величины давления как от датчика 125, так и от датчика 127. В других вариантах тормозной гидроаккумулятор 184 выполнен с возможностью получения разрежения непосредственно из вакуум-бачка 138.
Тормозной гидроаккумулятор 184 может представлять собой внутреннюю вакуумную емкость в усилителе 140 тормозов, который, в свою очередь, может быть соединен с колесными тормозами транспортного средства (не показаны). Разрежение в тормозном гидроаккумуляторе 184 может увеличивать усилие, прилагаемое водителем 196 транспортного средства через тормозную педаль 150 к главному цилиндру для включения тормозов транспортного средства (не показаны). Положение тормозной педали 150 может контролировать датчик 154 тормозной педали. Вакуум-бачок 138 выполнен с возможностью подключения к одному или нескольким устройствам-потребителям разрежения в составе системы двигателя. Например, вакуум-бачок 138 можно подключить к одному или нескольким клапанам продувки канистры (не показаны), клапану регулирования движения заряда (не показан) и приводу перепускной заслонки турбины в двигателе с наддувом (не показано на ФИГ. 1А).
Несмотря на то, что на ФИГ. 1А это не показано, в других примерах вакуум-бачок 138 и тормозной гидроаккумулятор 184 можно соединить непосредственно с впускным коллектором 46 по отдельным каналам. То есть тормозной гидроаккумулятор 184 можно непосредственно соединить с впускным коллектором через первый канал, отдельный от второго канала, непосредственно соединяющего вакуум-бачок 138 с впускным коллектором 46. Кроме того, первый и второй каналы могут не содержать аспиратор 20 и проходить в обход аспиратора 20. Вакуум-бачок 138 и тормозной гидроаккумулятор 184 выполнены с возможностью получения разрежения из впускного коллектора 46, когда глубина разрежения во впускном коллекторе превышает глубину разрежения, создаваемого на аспираторе, или когда аспиратор не создает разрежение.
Контроллер 12 показан на ФИГ. 1А в виде известного из уровня техники микрокомпьютера, содержащего: микропроцессорное устройство 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и известную из уровня техники шину данных. Контроллер 12 направляет команды на приводы различных устройств, например: дроссельной заслонки 64, ОКА 74, клапана 80 РОГ, форсунки 66 и т.п. Контроллер 12 показан принимающим, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от связанных с двигателем 10 датчиков, среди которых можно назвать: показание температуры хладагента двигателя ТХД (ЕСТ) от датчика 112 температуры, связанного с рубашкой 114 охлаждения; датчик 194 положения, связанного с педалью 192 акселератора для получения показаний положения педали акселератора, которым управляет водитель 196 транспортного средства; давления воздух в коллекторе ДВК (MAP) от датчика давления 122, установленного во впускном коллекторе 46; температуры всасываемого воздуха и барометрического давления БД (BP) от датчика 121 температуры/давления во впускном канале 42; величины разрежения в тормозном вакуум-бачке 184 от датчика 127 давления, величины разрежения в вакуум-бачке 138 от датчика 125 давления, сигнал профиля зажигания ПЗ (PIP) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 40; массового расхода воздуха, подаваемого в двигатель, от датчика 120 массового расхода воздуха; и положения дросселя от датчика 58.
Контроллер 12 также может принимать сигналы от датчика 126 отработавших газов и кислородного датчика 79, которые можно использовать для оценки емкости по кислороду устройства 70 снижения токсичности отработавших газов. Датчик 118 положения двигателя может генерировать заданное количество импульсов с одинаковыми промежутками при каждом обороте коленчатого вала, на основании которых можно определить частоту вращения двигателя ЧВД (оборотов в минуту). В носитель информации - постоянное запоминающее устройство 106 в составе контроллера 12 можно ввести машиночитаемые данные, представляющие собой команды, исполняемые микропроцессором 102 для выполнения раскрытых в настоящей заявке способов, а также других предполагаемых, но конкретно не перечисленных вариантов. Примеры способов и алгоритмов раскрыты в настоящем описании со ссылками на ФИГ. 3-10.
На ФИГ. 1В изображен пример системы 11 двигателя, содержащей двигатель с наддувом. Система 11 двигателя схожа с системой 10 двигателя на ФИГ. 1А, за исключением, главным образом, расположения аспиратора и наличия турбокомпрессора и тракта рециркуляции отработавших газов высокого давления РОГ ВД (HP-EGR). В связи с этим, компоненты двигателя, ранее раскрытые на ФИГ. 1А, имеют схожие номера позиций на ФИГ. 1В и повторно не раскрываются.
Двигатель 11 содержит устройство сжатия, например турбокомпрессор или нагнетатель, включающее в себя как минимум компрессор 162, установленный вдоль впускного канала 42. В случае турбокомпрессора, компрессор 162 может как минимум частично приводиться в действие турбиной 164, вращаемой отработавшими газами (например, через вал), установленной вдоль выпускного канала 19. Компрессор 162 всасывает воздух из впускного канала 42 для подачи в наддувочную камеру 144. Отработавшие газы вращают турбину 164, связанную с компрессором 162 через вал 161. В случае нагнетателя, компрессор 162 может как минимум частично приводиться в действие двигателем и (или) электрической машиной, и может не содержать турбину, вращаемую отработавшими газами. Количество сжатого газа, подаваемого в один или несколько цилиндров двигателя с помощью турбокомпрессора или нагнетателя, можно регулировать с помощью контроллера 12.
Перепускная заслонка 168 может быть установлена перпендикулярно турбине 164 в составе турбокомпрессора. В частности, перепускную заслонку 168 можно установить в байпасной магистрали 166, расположенной между входом и выходом турбины 164. Регулируя положение перепускной заслонки 168, можно регулировать величину наддува, создаваемого турбиной, вращаемой отработавшими газами.
Кроме того, в примере системы двигателя на ФИГ. 1В аспиратор 21 может быть установлено в трубе 28 (в настоящем описании также именуемой «байпасная магистраль 28 компрессора») параллельно компрессору 162. Труба 28 может быть параллельна впускному каналу 42, как показано на ФИГ. 1В, и может отводить часть наддувочного воздуха из области ниже по потоку от компрессор 162 и выше по потоку от впускного дросселя 62 в область выше по потоку от компрессора 162 через аспиратор 21. Часть сжатого воздуха, отводимая из области ниже по потоку от компрессора 162 (и выше по потоку от впускного дросселя 62) может течь в первый конец 29 трубы 28 через аспиратор 21 и вытекать во впускной канал 42 выше по потоку от компрессора 162 на втором конце 27 трубы 28. Поток воздуха через аспиратор 21 создает область низкого давления в аспираторе 21, создавая, таким образом, источник разрежения для вакуум-бачков и таких устройств-потребителей разрежения, как канистры улавливания топливных паров, усилители тормозов и т.п. Величина разрежения, создаваемого аспиратором, может зависеть от расхода эжектирующего потока воздуха через аспиратор 21. Отсечной клапан аспиратора (ОКА) 74 можно установить в байпасной магистрали 28 компрессора выше по потоку от аспиратора 21, как показано на ФИГ. 1В. В другом варианте ОКА 74 можно установить ниже по потоку от аспиратора 21. Кроме того, положение ОКА 74 может регулировать контроллер 12, как указывалось выше со ссылкой на ФИГ. 1А, для изменения величины разрежения, создаваемого аспиратором 21. Таким образом, положение ОКА 74 можно регулировать в зависимости от частоты вращения двигателя, температуры ОКА и других параметров, раскрытых ниже со ссылками на ФИГ. 3-14. Как и на ФИГ. 1А, разрежение, созданное аспиратором 21, можно подавать как в вакуум-бачок 138, так и в тормозной гидроаккумулятор 184.
Следует понимать, что, хотя на ФИГ. 1В аспиратор 21 показан установленным параллельно компрессору 162 в трубе 28 (или байпасной магистрали 28 компрессора), другие варианты с двигателем с наддувом могут содержать аспиратор 21, установленный параллельно впускному дросселю 62 как показано в примере осуществления безнаддувного двигателя на ФИГ. 1А. Другие варианты могут содержать несколько эжекторов, установленных в различных местоположениях в системе двигателя. Эти несколько эжекторов можно соединить между собой посредством контрольных клапанов для создания разрежения необходимой величины.
Двигатель 11 может содержать систему РОГ высокого давления (РОГ ВД) для рециркуляции части отработавших газов из выпускного коллектора во впускной коллектор, а именно - из выпускной системы двигателя выше по потоку от турбины 164 с приводом от отработавших газов во впускной коллектор 46 ниже по потоку от впускного дросселя 62 и компрессора 162. Система РОГ ВД может содержать трубу 84 РОГ ВД и клапан 158 РОГ ВД, выполненный с возможностью регулировать количество отработавших газов, рециркулируемых по трубе 84 РОГ ВД. Хотя это и не показано на ФИГ. 1В, двигатель 11 также может содержать систему РОГ низкого давления РОГ НД (LP-EGR) для рециркуляции части отработавших газов из выпускного коллектора во впускной коллектор, а именно - из выпускной системы двигателя выше по потоку от турбины 164 с приводом от отработавших газов во впускную систему двигателя выше по потоку от впуска компрессора 162.
Контроллер 12 на ФИГ. 1В может быть схож с контроллером 12 на ФИГ. 1А. Однако контроллер 12 на ФИГ. 1В может управлять клапаном 158 РОГ ВД и перепускной заслонкой 168 в дополнение к управлению приводами таких устройств как дроссельная заслонка 64, ОКА 74, форсунка 66 и т.п. Кроме того, контроллер 12 на ФИГ. 1В выполнен с возможностью приема сигналов отдатчиков, ранее раскрытых на ФИГ. 1А, а также значения давления на входе дросселя (или давления наддува) от датчика 123, установленного в наддувочной камере 144 ниже по потоку от компрессора 162 в двигателе 11.
Следует понимать, что, несмотря на то, что далее в описании раскрываемого изобретения речь может идти о двигателе 10, остальная часть описания также может распространяться на двигатель 11 на ФИГ. 1В, если особо не оговорено иное.
В некоторых вариантах осуществления двигатель (например, двигатель 10 или двигатель 11) может быть связан с системой электродвигателя / аккумуляторной батареи в составе гибридного транспортного средства. Схема силовой установки гибридного транспортного средства может быть параллельной, последовательной, последовательно-параллельной, а также представлять собой какую-либо их разновидность или комбинацию. Некоторые варианты осуществления также могут содержать двигатель иного типа, например, дизельный.
ФИГ. 2 иллюстрирует пример силовой установки 200 транспортного средства. Силовая установка 200 транспортного средства содержит двигатель 10 сгорания и мотор 220. В качестве неограничивающего примера, двигатель 10 может представлять собой двигатель внутреннего сгорания, а мотор 220 - электромотор. Двигатель 10 силовой установки 200 транспортного средства может представлять собой двигатель 10, изображенный в варианте на ФИГ. 1А или двигатель 10 в варианте на ФИГ. 1В. Мотор 220 может быть выполнен с возможностью использовать или потреблять энергию из источника, не являющегося двигателем 10. Например, двигатель 10 может потреблять жидкое топливо (например, бензин) для выработки эффективной мощности, а мотор 220 может потреблять электроэнергию для выработки мощности. Следовательно, транспортное средство с силовой установкой 200 может обозначаться термином «транспортное средство с гибридно-электрической силовой установкой» (ТСГЭСУ).
Силовая установка 200 транспортного средства выполнена с возможностью функционирования в различных режимах в зависимости условий, в которых ей приходится работать. В некоторых из этих режимов двигатель 10 может удерживаться в заглушенном (т.е. отключенном и неподвижном) состоянии, в котором сгорание топлива в двигателе прервано. Например, в отдельных рабочих режимах, когда двигатель 10 отключен, мотор 220 может приводить транспортное средство в движение посредством ведущего колеса 230, как показано стрелкой 222.
В других режимах работы, двигатель 10 можно отключать (как раскрыто выше), а мотор 220 может работать для зарядки аккумулятора 250. Например, мотор 220 выполнен с возможностью приема крутящего момента от ведущего колеса 230, как показано стрелкой 222, и преобразования кинетической энергии транспортного средства в электрическую для накапливания в аккумуляторе 250, как показано стрелкой 224. Данная операция может носить название «рекуперативное торможение транспортного средства». Таким образом, в некоторых вариантах осуществления мотор 220 может функционировать как генератор. Тем не менее, в других вариантах крутящий момент от ведущего колеса 230 вместо него может принимать генератор 260, при этом генератор может преобразовывать кинетическую энергию транспортного средства в электроэнергию для накопления в аккумуляторе 250, как показано стрелкой 262.
В других режимах работы двигатель 10 может функционировать за счет сжигания топлива, полученного из топливной системы 240, как показано стрелкой 242. Например, двигатель 10 может функционировать для приведения транспортного средства в движение посредством ведущего колеса 230 как показано стрелкой 212, в то время как мотор 220 отключен. В других режимах работы, для приведения транспортного средства в движение посредством ведущего колеса 230 может работать как двигатель 10, так и мотор 220, как показано стрелками 212 и 222 соответственно. Схема, при которой двигатель и мотор могут выборочно приводить транспортное средство в движение, может обозначаться термином «параллельная схема силовой установки транспортного средства». Следует отметить, что в некоторых вариантах осуществления мотор 220 может приводить транспортное средство в движение через первую пару ведущих колес, а двигатель 10 - через вторую пару ведущих колес.
В других вариантах осуществления схема силовой установки 200 транспортного средства может быть последовательной, в которой двигатель не приводит ведущие колеса в движение непосредственно. Вместо этого двигатель 10 может работать для подачи питания на мотор 220, который, в свою очередь, может приводить транспортное средством в движение через ведущее колесо 230, как показано стрелкой 222. Например, в отдельных режимах работы, двигатель 10 может приводить в действие генератор 260, который, в свою очередь, может подавать электроэнергию на один или несколько моторов 220, как показано стрелкой 214, или на аккумулятор 250, как показано стрелкой 262. В качестве другого примера, двигатель 10 может работать для приведения в действие мотора 220, который, в свою очередь, может функционировать как генератор для преобразования эффективной мощности двигателя в электроэнергию, при этом электроэнергию можно накапливать в аккумуляторе 250 для последующего потребления мотором.
Топливная система 240 может содержать один или несколько топливных баков 244 для хранения топлива в транспортном средстве. Например, в топливном баке 244 можно хранить жидкое топливо одного или нескольких видов, включая, помимо прочих, бензин, дизельное топливо и спиртосодержащие виды топлива. В некоторых примерах топливо можно хранить в транспортном средстве в виде смеси одного или нескольких различных видов топлива. Например, топливный бак 244 может быть выполнен с возможностью содержать смесь бензина и этанола (например, Е10, Е85 и т.п.) или смесь бензина и метанола (например, М10, М85 и т.п.), причем эти виды топлива или смеси можно подавать в двигатель 10, как показано стрелкой 242. Таким образом, жидкое топливо может поступать из топливного бака 244 в двигатель 10 автотранспортного средства, показанного на ФИГ. 2. В двигатель 10 также можно подавать и другие подходящие виды топлива или топливные смеси для их сжигания в двигателе с целью выработки мощности. Эффективную мощность двигателя можно использовать для приведения транспортного средства в движение, как показано стрелкой 212, или для зарядки аккумулятора 250 с помощью мотора 220 или генератора 260.
В некоторых вариантах осуществления аккумулятор 250 может быть выполнен с возможностью накапливать электроэнергию для питания других потребителей электроэнергии в составе транспортного средства (помимо мотора), включая системы обогрева и кондиционирования воздуха в салоне (кабине), запуска двигателя, фары, аудио- и видеосистемы салона и т.п. В качестве неограничивающего примера, аккумулятор 250 может содержать одну или несколько батарей и (или) конденсаторов.
Система 12 управления (в настоящем описании также именуемая «контроллер» 12) выполнена с возможностью взаимодействия с одним или несколькими из следующих устройств: двигатель 10, мотор 220, топливная система 240, аккумулятор 250 и генератор 260. Как будет раскрыто в структурной схеме на ФИГ. 5, система 12 управления выполнена с возможностью приема сигналов обратной связи от датчиков, связанных с одним или несколькими из следующих устройств: двигатель 10, мотор 220, топливная система 240, аккумулятор 250 и генератор 260. Система 12 управления также может направлять сигналы управления одному или нескольким из следующих устройств: двигатель 10, мотор 220, топливная система 240, аккумулятор 250 и генератор 260 в ответ на указанные сигналы обратной связи от датчиков. Система 12 управления выполнена с возможностью приема от водителя 196 транспортного средства сигнала запроса водителя на какое-либо действие со стороны силовой установки транспортного средства. Например, система 12 управления выполнена с возможностью получения сигнала обратной связи от датчика 194 положения педали, связанного с педалью 192. Под педалью 192 может схематически пониматься тормозная педаль и (или) педаль акселератора.
Аккумулятор 250 может периодически получать электроэнергию от источника 280 питания, расположенного за пределами транспортного средства (например, не входящего в состав транспортного средства) как показано стрелкой 284. В качестве неограничивающего примера, силовая установка 200 транспортного средства может быть выполнена по последовательной схеме (ТСГЭСУ), в которой электроэнергия может поступать в аккумулятор 250 из источника 280 питания по кабелю 282 электропередачи. Во время зарядки аккумулятора 250 от источника 280 питания, кабель 282 электропередачи может создавать электрическое соединение между аккумулятором 250 и источником 280 питания. Когда силовая установка работает для приведения транспортного средства в движение, кабель 282 электропередачи между источником 280 питания и аккумулятором 250 может быть отключен. Система 12 управления может определять и (или) регулировать количество электроэнергии в аккумуляторе, которое может обозначаться термином «степень заряженности» СЗ (SOC). Аккумулятор 250 также может именоваться «аккумуляторная батарея».
В других вариантах осуществления кабель 282 электропередачи может отсутствовать, при этом аккумулятор 250 может получать электроэнергию от источника 280 питания беспроводным способом. Например, аккумулятор 250 может быть выполнен с возможностью получения электроэнергии от источника 280 питания одним или несколькими из следующих способов: электромагнитная индукция, радиоволны и электромагнитный резонанс. В связи с этим, следует понимать, что для зарядки аккумулятора 250 от источника питания, не входящего в состав транспортного средства, можно использовать любое подходящее решение. Таким образом, мотор 220 может приводить транспортное средство в движение, используя другой источник энергии помимо топлива, потребляемого двигателем 10.
Топливная система 240 выполнена с возможностью периодической заправки топливом из источника за пределами транспортного средства. В качестве неограничивающего примера, силовую установку 200 транспортного средства можно заправлять топливом через топливораздаточное устройство 270 как показано стрелкой 272. В некоторых вариантах осуществления топливный бак 244 может быть выполнен с возможностью содержать топливо, полученное из топливораздаточного устройства 270, до подачи в двигатель 10 для сжигания. В некоторых вариантах осуществления система 12 управления выполнена с возможностью получения сигнала уровня топлива в топливном баке 244 от датчика уровня топлива. Значение уровня топлива в топливном баке 244 (например, определенное датчиком уровня топлива) можно сообщить водителю транспортного средства, например, с помощью топливомера или указателя уровня топлива на приборной панели 296.
Силовая установка 200 транспортного средства может также содержать датчик 298 температуры наружного воздуха / влажности и датчик системы предотвращения опрокидывания, например: датчик (датчики) 299 жесткости в горизонтальном и (или) продольном направлении и (или) рыскания. Приборная панель 296 может содержать индикаторную лампу (лампы) и (или) текстовый дисплей для отображения сообщений водителю. Приборная панель 296 может также содержать различные устройства для ввода информации водителем, например, кнопки, сенсорные панели, устройства речевого ввода / распознавания речевых команд и т.п. Например, приборная панель 296 может содержать кнопку 297 заправки топливом, вручную включаемую или нажимаемую водителем транспортного средства, чтобы начать заправку. Например, как будет подробнее раскрыто ниже, при включении водителем транспортного средства кнопки 297 заправки топливом, может быть сброшено давление из топливного бака, чтобы можно было заправить его топливом.
В другом варианте осуществления приборная панель 296 может быть выполнена с возможностью передачи водителю аудиосообщений без помощи дисплея. Кроме того, в число датчиков 299 может входить датчик вертикального ускорения для указания неровности дороги. Эти устройства можно подключить к системе 12 управления. В одном примере система управления может регулировать выходные параметры двигателя и (или) колесные тормоза для повышения устойчивости транспортного средства в зависимости от показаний датчика (датчиков) 299.
Обратимся к ФИГ. 3, на которой представлен пример алгоритма 300 для управления регулирующим клапаном аспиратора (РКА), установленным во впускном канале либо выше, либо ниже по потоку от аспиратора (либо выполненного с ним за одно целое), как показано на ФИГ. 1А. Алгоритм 300 также можно использовать для управления РКА, установленным в байпасной магистрали компрессора двигателя с наддувом, например, двигателя 11 на ФИГ. 1В. Алгоритм позволяет регулировать эжектирующий поток через аспиратор, изменяя степень открытия РКА в зависимости от параметров работы двигателя.
На шаге 304 алгоритм содержит определение и (или) измерение параметров работы двигателя и (или) транспортного средства. Они включают в себя, например, частоту вращения двигателя, температуру двигателя, атмосферные условия (температуру, БД, влажность и т.п.), ДВК, давление наддува (для двигателя с наддувом), необходимый крутящий момент, РОГ, степень заряженности (СЗ) аккумулятора и т.п.
На шаге 306 алгоритм 300 может определить, позволяют ли параметры двигателя открыть РКА (из закрытого положения). А именно, степень открытия РКА можно увеличить для создания разрежения при наличии подходящих параметров работы двигателя. В примере с двухпозиционным РКА (например, двухходовым), алгоритм может определить, можно ли установить РКА в полностью открытое положение из полностью закрытого. Если РКА является бесступенчато-регулируемым, алгоритм может определить, можно ли переключить РКА из полностью закрытого положения в одно из промежуточных положений между полностью закрытым и полностью открытым. В одном примере одним из параметров работы двигателя, позволяющих открыть РКА, может быть частота вращения двигателя выше предела перегрузки трансмиссии. В другом примере подходящим параметром работы двигателя может быть ДВК ниже давления на входе дросселя ДВД (TIP). Как раскрыто выше, РКА можно регулировать независимо от уровня разрежения в каком-либо вакуум-бачке. Контроллер может запустить алгоритм 400 на ФИГ. 4 для определения того, позволяют ли условия открыть РКА на шаге 306. Если будет установлено, что подходящие условия для открытия РКА отсутствуют, алгоритм 300 переходит на шаг 308 для ожидания появления подходящих параметров работы двигателя, а РКА не может быть открыт. В одном примере РКА можно удерживать в предыдущем положении, либо установить в более закрытое положение в зависимости от текущих параметров работы двигателя.
Если будет установлено, что РКА можно открыть, алгоритм 300 переходит на шаг 310, на котором РКА открывают для создания разрежения. Например, степень открытия РКА можно увеличить для увеличения расхода эжектирующего потока через аспиратор. РКА может представлять собой электромагнитный клапан. Установка РКА в открытое положение может содержать направление электрического тока для возбуждения электромагнита. Кроме того, контроллер может включить электромагнит ОКА в направлении открытия. Открытие клапана может включать в себя его установку в полностью или более открытое положение из закрытого положения (например, из полностью закрытого). Следует учесть, что в раскрытом примере нормальным положением РКА может быть полностью закрытое положение, когда ток на электромагнит не подается. В других примерах РКА может быть бесступенчато-регулируемым клапаном, степень открытия которого можно изменять между полностью открытым, полностью закрытым и любым промежуточным положением. В результате увеличения расхода эжектирующего потока через аспиратор путем открытия РКА можно повысить величину разрежения, создаваемого аспиратором.
На шаге 312 алгоритм 300 может определить, произошло ли изменение параметров работы двигателя, могущее повлечь за собой закрытие РКА. Например, частота вращения двигателя может упасть ниже предела перегрузки трансмиссии. В другом примере ДВК может превысить ДВД в примере двигателя с наддувом. Контроллер может включить алгоритм 700, представленный на ФИГ. 7, на шаге 312 для определения того, изменились ли параметры двигателя достаточно для закрытия РКА.
Если будет установлено, что параметры работы двигателя не изменились, алгоритм 300 переходит к шагу 314 для удержания РКА в открытом положении (со степенью открытия РКА, увеличенной на шаге 310), чтобы продолжить создание разрежения. Затем алгоритм 300 может вернуться на шаг 312 для контроля изменения параметров работы двигателя, могущих потребовать закрытия РКА.
В другом варианте, если на шаге 312 будет установлено, что в результате изменения параметров работы двигателя возникла необходимость закрытия РКА, алгоритм 300 переходит на шаг 316 для закрытия РКА, например, путем прекращения подачи тока. Например, РКА можно установить в полностью закрытое положение из полностью открытого. В другом примере РКА можно перевести в почти закрытое положение из почти открытого. В примере электромагнитного РКА можно прекратить подачу тока на электромагниты, что приведет к закрытию РКА и блокированию эжектирующего потока через аспиратор. После этого алгоритм 300 завершает работу.
Обратимся к ФИГ. 4, на которой представлен алгоритм 400 для определения того, установились ли параметры работы двигателя, позволяющие открыть РКА. Как указывалось ранее, контроллер может запустить алгоритм 400 на шаге 306 алгоритма 300 на ФИГ. 3. А именно, алгоритм 400 оценивает частоту вращения двигателя, давление в коллекторе (в двигателе с наддувом), условия неисправности и т.п.для определения положения РКА.
На шаге 404 можно определить, является ли система транспортного средства гибридным транспортным средством. Если да, то алгоритм 400 переходит к шагу 406, на котором положение РКА определяют с помощью алгоритма 500 на ФИГ. 5. А именно, в системе гибридного транспортного средства положение РКА можно регулировать в другом порядке в зависимости от параметров работы системы при работающем или заглушенном двигателе. Например, в процессе глушения двигателя можно воспользоваться возможностью создания дополнительного разрежения пока двигатель не придет в неподвижное состояние. Затем алгоритм 400 может перейти к шагу 410.
Если на шаге 404 будет установлено, что система транспортного средства не является гибридным транспортным средством, алгоритм 400 переходит к шагу 408 для определения того, находится ли частота вращения двигателя в необходимом диапазоне для открытия РКА. Для определения того, находится ли частота вращения двигателя между первым, нижним, и вторым, верхним, значением может быть запущен алгоритм 600 на ФИГ. 6.
Обратимся к ФИГ. 6, изображающей алгоритм 600 для измерения частоты вращения двигателя и определения того, находится ли частота вращения двигателя в диапазоне, при котором РКА может находиться в открытом положении. На шаге 602 алгоритм 600 может определить или измерить частоту вращения двигателя. Частоту вращения двигателя можно измерить на основании сигнала профиля зажигания (ПЗ) от датчика на эффекте Холла (например, датчика 118 на эффекте Холла двигателя 10 и двигателя 11), связанного с коленчатым валом. Датчик 118 на эффекте Холла может генерировать заданное количество импульсов с одинаковыми промежутками при каждом обороте коленчатого вала, на основании которых можно определить частоту вращения двигателя (ЧВД).
Затем, на шаге 604, алгоритм 600 может определить, лежит ли измеренное или расчетное значение частоты вращения двигателя в желаемом диапазоне между первым, нижним значением частоты, Sp_1 и вторым, верхним значением частоты Sp_2. Например, в основе первого, нижнего значения частоты Sp_1 может лежать предел перегрузки трансмиссии. Под пределом перегрузки трансмиссии может пониматься частота, ниже которой двигатель может испытывать перегрузку. Таким образом, предел перегрузки трансмиссии может представлять собой минимальную частоту вращения, при которой снижается вибрация в трансмиссии. Шум и вибрация в трансмиссии могут возникать, когда частота вращения двигателя значительно ниже, чем необходимо для той или иной нагрузки двигателя. В одном примере предел перегрузки трансмиссии (и Sp_1) может составлять 1250 оборотов в минуту. В другом примере предел перегрузки трансмиссии (и Sp_1) может составлять 1500 оборотов в минуту. В основе второго, верхнего значения частоты Sp_2 может лежать частота отсечки по тахометру. Частота отсечки по тахометру означает заданный максимальный предел частоты вращения двигателя для того или иного двигателя, превышение которого может привести к значительному ухудшению характеристик компонентов двигателя. В одном примере частота отсечки по тахометру (и Sp_2) может составлять 6000 оборотов в минуту. В другом примере частота отсечки по тахометру (и Sp_2) может составлять 7000 оборотов в минуту.
Если на шаге 604 будет установлено, что расчетная или измеренная частота вращения двигателя лежит в диапазоне от Sp_1 до Sp_2, алгоритм 600 переходит на шаг 608 для определения того, что частота вращения двигателя лежит в желаемом диапазоне. В этом случае, РКА можно открыть (или увеличить степень открытия РКА), если отсутствуют какие-либо другие параметры работы двигатель, не допускающие открытия РКА. Однако, если будет установлено, что частота вращения двигателя ниже Sp_1 или выше Sp_2, алгоритм 600 переходит к шагу 606, чтобы определить, что частота вращения двигателя не лежит в желаемом диапазоне. Таким образом, РКА нельзя открыть (и можно закрыть, если он находился в открытом положении), если частота вращения двигателя ниже Sp_1 или выше Sp_2. После этого можно завершить выполнение алгоритма 600. Итак, алгоритм 600 может определить, лежит ли частота вращения двигателя в желаемом диапазоне, а алгоритм 400 на ФИГ. 4 может использовать результат такого определения.
Вернемся на шаг 408 алгоритма 400: если будет определено, что частота вращения двигателя не лежит в желаемом диапазоне, алгоритм 400 переходит на шаг 414, на котором РКА нельзя открыть, а можно удерживать в закрытом положении (или можно закрыть, если он находился в открытом положении). Итак, РКА нельзя установить в открытое положение и можно полностью закрыть. Иначе говоря, степень открытия РКА увеличить нельзя. Далее алгоритм 400 может перейти на шаг 416.
Однако, если на шаге 408 будет определено, что частота вращения двигателя находится в желаемом диапазоне, в случае двигателя с наддувом алгоритм 400 переходит на необязательный шаг 410, на котором он может проверить, работает ли двигатель в режиме наддува, а также то, превышает ли абсолютное давление воздуха в коллекторе (ДВК) ДВД. Давление в коллекторе может определить датчик давления в коллекторе (например, датчик давления 122 на ФИГ. 1А и 1В), а давление на входе дросселя (или давление в наддувочной камере) может определить датчик давления на входе дросселя, например, датчик 123 ДВД на ФИГ. 1В. Если будет установлено, что ДВК превышает ДВД (например, когда двигатель выходит из режима наддува, когда ДВД равно барометрическому давлению), алгоритм 400 переходит на шаг 412, на котором он может определить наличие или отсутствие возможности рециркуляции загрязненного воздуха и перейти на шаг 414, на котором РКА не открывают и удерживают в закрытом положении. При необходимости, барометрическое давление (БД) можно измерять с помощью совмещенного датчика температуры и давления, например, датчика 121 на ФИГ. 1В.
Загрязненный воздух может присутствовать во впускном коллекторе в форме топливных паров, удаленных продувкой из канистры улавливания топливных паров (например, из продувочного канала 76 на ФИГ. 1А и 1В), смеси воздуха и топливных паров, поступившей из системы принудительной вентиляции картера (ПВК) (например, по каналу 78 ПВК на ФИГ. 1А и 1В), отработавших газов обратного потока, образующихся при перекрытии выпускного клапана и впускных клапанов, и (или) отработавших газов, поступивших из системы рециркуляции отработавших газов (РОГ), например, как показано на ФИГ. 1А и 1В. Данная смесь воздуха, отработавших газов и топливных паров может содержать компоненты, накапливающиеся в виде не полностью полимеризованных отложений при нахождении в областях впускной системы двигателя с относительно низкой температурой. Например, возможно образование не полностью полимеризованных отложений в воздухоочистителе во впускном канале, поскольку температура в воздухоочистителе может быть относительно низкой. Когда давление в коллекторе превышает ДВД в двигателе с наддувом, а РКА открывают (или увеличивают степень открытия РКА), смесь воздуха, топливных паров и отработавших газов, находящаяся во впускном коллекторе, может устремиться через аспиратор в байпасной магистрали компрессора (например, трубе 28 на ФИГ. 1В) к воздухоочистителю (например, воздухоочистителю 133 на ФИГ. 1А и 1В) во впускном канале. Следовательно, для уменьшения образования осадка при рециркуляции загрязненного воздуха по байпасной магистрали компрессора, РКА можно закрыть, когда ДВК по результатам измерения превышает ДВД.
Однако, если будет установлено, что режим наддува отсутствует, или ДВК не превышает ДВД, алгоритм 400 переходит к шагу 416.
Следует отметить, что, если двигатель является не наддувным, а, например, безнаддувным двигателем, алгоритм 400 может пропустить шаг 410 и перейти с шага 408 непосредственно на шаг 416 (или через шаг 410).
На шаге 416 алгоритм 400 может проверить, был ли установлен диагностический код неисправности ДКН (DTC). ДКН можно установить в контроллере после выявления неисправности одного или нескольких компонентов двигателя. В некоторых вариантах осуществления для оповещения водителя транспортного средства возможно включение индикаторной лампы неисправности ИЛН (MIL) при выявлении неисправности. Далее, в зависимости от типа неисправности, контроллер может изменить один или несколько параметров работы двигателя, чтобы обеспечить возможность продолжения надежной работы двигателя. При этом, контроллер может разрешить работу двигателя даже в случае неисправности одного или нескольких компонентов, направив водителю транспортного средства сигнал о необходимости устранения проблемы.
Работу двигатель с параметрами, измененными по причине выявления неисправность двигателя, можно обозначить термином «измененная работа двигателя». Измененная работа двигателя может включать в себя эксплуатацию двигателя с таким изменением параметров, как увеличение или уменьшение потока РОГ, изменение угла опережения зажигания, изменение впрыска топлива и т.п. Параметры работы двигателя также можно изменять в зависимости от вида выявленной неисправности. Например, положение РКА можно выбирать в зависимости от диагностированного условия неисправности. Первое условие неисправности может требовать закрытия РКА, а второе условие неисправности может требовать удержания РКА в открытом положении. В другом примере, если будет установлена неисправность датчика отработавших газов, можно изменить момент и (или) количество впрыска топлива.
Итак, если на шаге 416 алгоритм 400 установит, что было выявлено условие неисправности, на шаге 418 можно запустить алгоритм 1000 на ФИГ. 10 для определения подходящего положения РКА. Как указано выше, выбор положения РКА может зависеть от типа неисправности и соответствующих изменений работы двигателя. Далее на шаге 420, в зависимости от результатов выполнения алгоритма 1000, можно определить, позволяет ли работа двигателя с параметрами, измененными в связи с выявленным условием неисправности, открыть РКА. Если нет, алгоритм 400 переходит к шагу 422, на котором РКА можно закрыть или удерживать закрытым (например, РКА нельзя открыть). В другом варианте, если на шаге 420 будет установлено, что при измененной работе двигателя открытие РКА желательно, алгоритм 400 переходит на шаг 424, чтобы определить, что РКА можно установить в открытое положение. Открытое положение может включать в себя или полностью открытое положение, или какое-либо положение между полностью открытым и полностью закрытым. Затем выполнение алгоритма 400 можно завершить.
Таким образом, с помощью контроллера можно регулировать положение отсечного клапана аспиратора (ОКА) в зависимости от частоты вращения двигателя. Первое исходное положение ОКА может зависеть от текущей измеренной частоты вращения двигателя. Например, первое исходное положение ОКА, зависящее исключительно от частоты вращения двигателя, может быть открытым (или почти полностью, частично открытым), когда текущая частота вращения двигателя превышает первое значение частоты вращения (Sp_1) и ниже второго значения частоты вращения (Sp_2). Удерживая ОКА в открытом положении можно создать значительный эжектирующий поток через аспиратор. В другом варианте первое исходное положение ОКА может быть закрытым, когда текущая частота вращения двигателя либо ниже первого значения частоты, либо превышает второе значение частоты вращения. Однако первое исходное положение можно изменить, если, согласно оценке, ДВК превышает ДВД в двигателе с наддувом. В примере, где первое исходное положение ОКА является открытым, ОКА можно установить в закрытое положение (например, полностью закрытое), если ДВК по результатам измерения превышает ДВД, чтобы уменьшить рециркуляцию загрязненного воздуха и образование отложений в воздухоочистителе и (или) других компонентах впускной системы. Кроме того, первое исходное положение РКА можно изменять в зависимости от типа условия неисправности двигателя и соответствующих изменений параметров работы двигателя. При этом, положение, в которое РКА был установлен в связи с возможностью рециркуляции загрязненного воздуха, также можно изменить, если работа двигателя, измененная в связи с ухудшением характеристик двигателя, требует изменить положение РКА. Следовательно, первое исходное положение РКА можно изменять в приоритетном порядке, если того требуют другие параметры работы двигателя.
Обратимся к ФИГ. 5, иллюстрирующей алгоритм 500 для выбора положения РКА в системе гибридного транспортного средства. А именно, РКА можно устанавливать в то или иное положение в зависимости от частоты вращения двигателя, когда двигатель работает для приведения транспортного средства в движение, и если частота вращения двигателя находится в необходимом диапазоне, как раскрыто на ФИГ. 6. РКА также можно открыть для создания разрежения при получении команды заглушить двигатель, и частота вращения двигателя находится в нижней части необходимого диапазона. Кроме того, РКА можно открывать или закрывать в процессе отключения двигателя в зависимости от содержания кислорода в каталитическом нейтрализаторе.
На шаге 502 можно определить, работает ли гибридное транспортное средство в режиме с работающим двигателем. В этом случае, двигатель может получать топливо и сжигать его для приведения в движение гибридного транспортного средства. В другом варианте двигатель может сжигать топливо для зарядки аккумуляторной батареи в гибридном транспортном средстве. Если будет установлено, что двигатель не работает, а заглушен и неподвижен, алгоритм 500 переходит к шагу 504, чтобы установить, была ли дана команда включить режим с работающим двигателем. Двигатель может быть неподвижен и не сжигать топливо, когда главным источником движущей силы гибридного транспортного средства выступает мотор. Например, мотор может быть главным источником движущей силы гибридного транспортного средства при езде в городских условиях или на малых скоростях. В этом случае, двигатель можно включать для сжигания топлива и приведения гибридного транспортного средства в движение при получении запроса на увеличение крутящего момента.
Если команда на включение режима с работающим двигателем не выдавалась, алгоритм 500 переходит на шаг 506 для сохранения режима с неработающим двигателем и завершается. В противном случае, если двигатель был запущен в работу, алгоритм 500 переходит к шагу 508 для определения, включен ли режим с работающим двигателем для приведения транспортного средства в движение. Например, двигатель может быть включен для зарядки аккумуляторной батареи. В другом примере двигатель может быть включен в ответ на запрос водителя на увеличение крутящего момента, например, при разгоне. Если на шаге 508 будет установлено, что двигатель не был включен для приведения транспортного средства в движение, алгоритм 500 переходит на шаг 510, чтобы определить, работает ли двигатель для зарядки аккумуляторной батареи. В этом случае, двигатель можно установить в режим холостого хода (например, 900 оборотов в минуту) на время зарядки аккумуляторной батареи. Таким образом, двигатель не может приводить гибридное транспортное средство в движение. При низких оборотах двигателя (например, в режиме холостого хода) можно тщательно контролировать воздушно-топливное отношение для снижения шума, вибрации и резкости ШВР (NVH). Поскольку во время зарядки аккумуляторной батареи двигатель может работать на низких оборотах, РКА можно удерживать в закрытом положении (или перевести в него) для смягчения негативного влияния на воздушно-топливное отношение. Следовательно, на шаге 512, алгоритм 500 может установить, что желательным положением РКА является закрытое. Точнее, эжектирующий поток через аспиратор может усложнить регулирование воздушно-топливного отношения в режиме холостого хода, в связи с чем РКА можно закрыть, чтобы прервать эжектирующий поток воздуха через аспиратор. После этого выполнение алгоритма 500 можно завершить.
Если на шаге 508 будет установлено, что двигатель был запущен для приведения в движение транспортного средства, алгоритм 500 переходит на шаг 514, чтобы определить, находится ли текущая частота вращения двигателя между первым, нижним значением частоты (Sp_1) и вторым, верхним значением частоты (Sp_2). Как раскрыто выше для алгоритма 600, в основе первого, нижнего значения частоты может лежать предел перегрузки трансмиссии. Например, первое, нижнее значение частоты может составлять 1200 оборотов в минуту. В основе второго, верхнего значения частоты (Sp_2) может лежать частота отсечки по тахометру. Например, второе, верхнее значение частоты может составлять 5000 оборотов в минуту для примера двигателя в гибридном транспортном средстве.
Если будет установлено, что частота вращения двигателя находится между первым, нижним значением и вторым, верхним значением, алгоритм 500 переходит к шагу 530, чтобы определить, что желаемым положением РКА является открытое. В этом случае, перевод в открытое положение может означать желательное изменение положения РКА, в результате которого расход эжектирующего потока через аспиратор увеличивается. То есть открытое положение может означать увеличение степени открытия РКА. Если частота вращения двигателя превышает второе, верхнее значение частоты (Sp_2), или частота вращения двигателя ниже первого, нижнего значения частоты (Sp_1), алгоритм 500 переходит на шаг 520, чтобы определить, что желаемым положением РКА является закрытое. В этом случае, эжектирующий поток воздуха через аспиратор может быть нежелателен, и степень открытия РКА можно уменьшить, установив РКА в более закрытое положение.
Вернемся на шаг 502: если будет установлено, что двигатель включен и работает, алгоритм 500 переходит к шагу 516, чтобы проверить, давал ли контроллер команду заглушить двигатель. Например, двигатель может работать и приводить гибридное транспортное средство в движение в режиме с выключенным мотором при езде по автомагистрали. Затем, когда гибридное транспортное средство съезжает с автомагистрали на городские улицы, может быть дана команда выключить двигатель и включить мотор для приведения транспортного средства в движение. В другом примере двигатель может быть включен и работать для зарядки аккумуляторных батарей. После достижения желаемой степени заряженности батарей может быть дана команда заглушить двигатель.
Если на шаге 516 будет установлено, что была дана команда заглушить двигатель, алгоритм 500 переходит на шаг 518 для проверки того, находится ли частота вращения двигателя между третьим значением (Sp_3) и четвертым значением (Sp_4). А именно, можно установить, что частота вращения двигателя превышает четвертое значение и находится ниже третьего значения. В этом случае, третье значение частоты (Sp_3) может быть ниже скорости холостого хода. Например, если скорость холостого хода составляет 900 оборотов в минуту, третье значение частоты вращения может составлять 700 оборотов в минуту. В другом примере третье значение частоты вращения может составлять 500 оборотов в минуту. Четвертое значение частоты вращения (Sp_4) может представлять собой скорость вращения непосредственно перед предстоящей остановкой двигателя. Например, частота вращения останавливающегося двигателя может составлять 50 оборотов в минуту. В этом случае, четвертое значение частоты вращения (Sp_4) может составлять 100 оборотов в минуту. В другом примере Sp_4 может составлять 200 оборотов в минуту. В другом примере четвертое значение частоты вращения может быть таким, чтобы снизить вибрацию при глушении двигателя. Во время отключения двигателя, когда в цилиндрах двигателя прекращается сгорание, поршни могут сжимать и расширять воздух, оставшийся в цилиндрах двигателя. В связи с этим, избыточная подача воздуха в цилиндры после прекращения подачи топлива может привести к задержке воздуха в цилиндрах. Сжатие и расширение воздуха может привести к возникновению крутильных импульсов с возможностью их передачи на кузов, что обостряет проблемы ШВР; данное явление называют «вибрация при глушении».
Соответственно, после того, как команда заглушить двигатель выдана, и двигатель замедляет вращение до полной остановки при закрытом впускном дросселе, РКА можно открыть на короткое время для создания разрежения с учетом диапазона частоты вращения двигателя и вибрации при глушении двигателя. Закрыв РКА до остановки двигателя, можно снизить избыточную подачу воздуха в цилиндры, в результате чего снизится вибрация двигателя при глушении.
Если на шаге 518 будет установлено, что частота вращения двигателя превышает четвертое значение частоты вращения и находится ниже третьего значение частоты вращения, алгоритм 500 переходит на шаг 522, чтобы определить, находится ли запас кислорода в устройстве снижения токсичности отработавших газов на пороговом уровне Threshold_1 или приближается к нему. Например, устройство снижения токсичности отработавших газов может представлять собой трехкомпонентный каталитический нейтрализатор с возможностью накапливать кислород. В частности, кислород можно накапливать в трехкомпонентном каталитическом нейтрализаторе, когда двигатель работает на обедненной смеси. Двигатель может работать на обедненной смеси в период глушения, когда он вращается без подачи топлива, и когда РКА открыт для создания разрежения (когда частота вращения двигателя находится между Sp_3 и Sp_4). Пропуская воздух через аспиратор во впускной коллектор, цилиндры и, в итоге, через устройство снижения токсичности отработавших газов, можно обеспечить накапливание кислорода в трехкомпонентном каталитическом нейтрализаторе. Через некоторое время трехкомпонентный каталитический нейтрализатор можно перенасытить кислородом, что снизит его способность очищать отработавшие газы после повторного запуска двигателя.
Соответственно, если на шаге 522 будет установлено, что запас кислорода в устройстве снижения токсичности отработавших газов находится на пороговом уровне Threshold_1 или приближается к нему (например, пороговый уровень может быть ниже предела насыщения), алгоритм 500 переходит к шагу 520, чтобы определить, что желательным положением РКА является закрытое. Далее, ОКА можно закрыть синхронно с впускным дросселем двигателя в гибридном транспортном средстве. А именно, когда впускной дроссель закрывают для снижения расхода воздуха через впускной канал после получения команды на глушение двигателя, РКА можно закрыть одновременно.
Напротив, если будет установлено, что запас кислорода в устройстве снижения токсичности отработавших газов не находится на пороговом уровне и не приближается к нему (например, он значительно ниже порогового уровня), алгоритм 500 переходит на шаг 530, чтобы определить, что РКА можно открыть. Таким образом, положение РКА можно регулировать независимо от частоты вращения двигателя. Точнее, РКА можно регулировать не только в зависимости от частоты вращения двигателя, но и от запаса кислорода в устройстве снижения токсичности отработавших газов.
Следует понимать, что если РКА находится в открытом положении после глушения двигателя (между третьим и четвертым значениями частоты вращения двигателя), содержание кислорода в каталитическом нейтрализаторе может повышаться, пока продолжается поток воздуха через аспиратор. Из-за такого увеличения запаса кислорода, при последующем запуске двигателя в цилиндры сначала может поступать воздушно-топливная смесь богаче стехиометрической.
Итак, разрежение в двигателе гибридного транспортного средства можно создавать с помощью аспиратора в режиме с работающим двигателем, когда двигатель приводит транспортное средство в движение, и частота вращения двигателя превышает первое, нижнее значение (например, скорость холостого хода или предел перегрузки трансмиссии) и ниже второго, верхнего значения частоты (например, частоты отсечки по тахометру). Аспиратор также может создавать разрежение, когда двигатель замедляет обороты до полной остановки, и частота вращения двигателя ниже третьего значения частоты вращения (например, ниже скорости холостого хода) и выше четвертого значения частоты вращения (частота непосредственно перед остановкой двигателя). Однако открытие РКА после глушения двигателя недопустимо, даже если частота вращения двигателя находится между третьим и четвертым значениями частоты вращения, если запас кислорода в трехкомпонентном каталитическом нейтрализаторе находится на пороговом уровне или приближается к нему. В этом случае, положение РКА может быть таким же, что и положение впускного дросселя. А именно, РКА можно установить в полностью закрытое положение, когда впускной дроссель переводят в полностью закрытое положения после глушения двигателя.
Следует отметить, что первое значение частоты вращения двигателя может также именоваться «первая частота вращения», второе значение частоты вращения двигателя может также именоваться «вторая частота вращения», третья частота вращения двигателя может также именоваться «третье значение частоты вращения» и четвертая частота вращения двигателя может также именоваться «четвертое значение частоты вращения».
Итак, пример системы гибридного транспортного средства может содержать двигатель, впускной коллектор, впускной дроссель, установленный во впускном канале, генератор, связанный с аккумуляторной батареей, колеса транспортного средства, приводимые в движение, используя крутящий момент, создаваемый либо двигателем, либо генератором, либо ими обоими, устройство наддува, содержащее компрессор, расположенный во впускном канале выше по потоку от впускного дросселя, эжектор, установленный в байпасной магистрали компрессора, регулирующий клапан эжектора РКЭ (ECV), расположенный выше по потоку от эжектора в байпасной магистрали компрессора, регулирующий эжектирующий поток через эжектор и байпасную магистраль компрессора, при этом эжектирующий вход эжектора связан с впускным каналом ниже по потоку от компрессора, а эжектирующий выход эжектора связан с впускным каналом выше по потоку от компрессора, и контроллер с командами, содержащимися в постоянном запоминающем устройстве и выполняемыми процессором для того, чтобы в первом режиме открывать РКЭ, когда частота вращения двигателя находится между первой частотой и второй частотой, при этом первая частота вращения двигателя ниже второй частоты вращения двигателя, и во втором режиме открывать РКЭ, когда частота вращения двигателя находится между третьей и четвертой частотой, при этом четвертая частота вращения двигателя номинально выше частоты в неподвижном состоянии двигателя, и в третьем режиме закрывать РКЭ независимо от частоты вращения двигателя. В этом случае, первый режим может включать в себя режим с работающим двигателем для приведения системы гибридного транспортного средства в движение, второй режим может включать в себя замедление оборотов двигателя до полной остановки, и третий режим может включать в себя нахождение запаса кислорода в каталитическом нейтрализаторе на пороговом уровне. Контроллер может содержать дополнительные команды для закрытия РКЭ при возникновении одного из следующих условий: частота вращения двигателя ниже первого значения частоты вращения двигателя, частота вращения двигателя выше второго значения частоты вращения двигателя, частота вращения двигателя выше третьей частоты вращения двигателя и частота вращения двигателя ниже четвертой частоты вращения двигателя. В основе первого значения частоты вращения двигателя может лежать предел перегрузки трансмиссии, в основе второго значения частоты вращения двигателя может лежать частота отсечки по тахометру, а третья частота вращения двигателя может быть ниже скорости холостого хода. Контроллер может содержать дополнительные команды для закрытия РКЭ, если давление во впускном коллекторе превышает давление на входе впускного дросселя.
Обратимся к ФИГ. 7, изображающей алгоритм 700 для определения наличия изменений параметров работы двигателя, требующих изменения положения РКА. А именно, алгоритм 700 определяет, изменились ли параметры работы двигателя (например, частота вращения двигателя, давление в коллекторе, температура РКА) так, что может возникнуть потребность в закрытии РКА.
На шаге 702 алгоритм 700 может проверить, изменилась ли частота вращения двигателя. Как раскрыто выше для алгоритма 600 на ФИГ. 6, РКА можно открыть, если будет установлено, что частота вращения двигателя выше первого, нижнего значения частоты (Sp_1) и ниже второго, верхнего значения частоты (Sp_2). Следовательно, на шаге 702 можно, в частности, проверить, упала ли частота вращения двигателя ниже первого, нижнего значения частоты Sp_1, или превысила ли частота вращения двигателя второе высокое значение Sp_2. Если да, то алгоритм 700 переходит на шаг 703, чтобы определить, что текущая частота вращения двигателя либо ниже Sp_1, либо выше Sp_2.
На шаге 704 можно выполнить необязательную проверку того, находится ли частота вращения двигателя ниже первого, нижнего значения, и равняется ли скорость транспортного средства (Vs) по существу нулю. Например, транспортное средство может находиться в неподвижном состоянии (a Vs может по существу равняться нулю), а его двигатель работать на холостом ходу. В другом примере частота вращения двигателя может представлять собой частоту холостого хода, даже если транспортное средство движется. Необязательную проверку на шаге 704 можно выполнить, чтобы обеспечить создание достаточного разрежения во время движения транспортного средства. Если скорость транспортного средства выше нуля (например, транспортное средство движется), и частота вращения двигателя ниже первого, нижнего значения частоты (Sp_1), алгоритм 700 может перейти на шаг 705 для удержания РКА в открытом положении. Если скорость транспортного средства по существу равна нулю, и частота вращения двигателя ниже первого, нижнего значения частоты, алгоритм 700 может перейти к шагу 716. В некоторых вариантах осуществления контроллер может пропустить необязательную проверку на шаге 704 и перейти непосредственно на шаг 716 с шага 703. Далее, на шаге 716, алгоритм 700 может определить, что изменение положения РКА желательно. А именно, РКА можно установить в более закрытое положение (из более открытого положения) в ответ на изменение частоты вращения двигателя.
Если на шаге 702 будет установлено, что частота вращения двигателя не изменилась, алгоритм 700 переходит к необязательной проверке на шаге 706 для двигателя с наддувом. Если двигатель безнаддувный, алгоритм 700 может перейти непосредственно на шаг 710 с шага 702. А именно, алгоритм 700 на шаге 706 может проверить, изменилось ли ДВК в двигателе с наддувом. Как разъяснялось выше для шагов 410 и 412 алгоритма 400, РКА можно открыть, когда ДВК не превышает ДВД. Если на шаге 706 будет выявлено изменение ДВК, алгоритм 700 может перейти на шаг 708, чтобы определить, что ДВК превышает ДВД. Например, ДВК может превышать ДВД, когда двигатель выходит из режима наддува, и ДВД по существу равно БД. Когда ДВК превышает ДВД, может происходить рециркуляция загрязненного воздуха. В связи с этим, на шаге 716 РКА можно установить в более закрытое положение для сокращения рециркуляции загрязненного воздуха.
Напротив, если изменение ДВК в двигателе с наддувом не будет выявлено, алгоритм 700 переходит на шаг 710, на котором можно определить температуру РКА. Температуру РКА можно определить на основании наличия подачи тока на РКА. Как разъяснялось выше, РКА может представлять собой электромеханический электромагнитный клапан, который можно открывать из нормально закрытого положения, подавая на него ток. При подаче тока на РКА может происходить его нагрев, приводящий к ухудшению характеристик компонента. В связи с этим, температуру РКА можно контролировать таким образом, чтобы при превышении пороговой температуры РКА можно было прекращать подачу на него тока, делая перерыв для охлаждения РКА. Процесс расчета температуры РКА будет подробно раскрыт ниже со ссылкой на ФИГ. 8.
Затем, на шаге 712, алгоритм 700 определяет, достигла ли температура РКА порогового значения Thresh_T или превысила его. В одном примере пороговое значение температуры Thresh_T может составлять 200°С. В другом примере пороговое значение температуры Thresh_T может составлять 150°С. Если будет установлено, что температура РКА достигла пороговой или превысила ее, алгоритм 700 переходит на шаг 712 для закрытия РКА. Так, прекратив подачу тока на РКА можно обеспечить его полное закрытие. В противном случае, если температура РКА ниже пороговой температуры Thresh_T, алгоритм 700 переходит на шаг 714 для удержания РКА в открытом положении, после чего его выполнение завершают.
Таким образом, контроллер в одном примере системы двигателя может содержать команды, введенные в постоянное запоминающее устройство и выполняемые процессором для открытия регулирующего клапана аспиратора (РКА) в той или иной степени в зависимости от частоты вращения двигателя и изменения этой степени в приоритетном порядке в случае изменения параметров работы двигателя. Регулирование степени открытия РКА может включать в себя увеличение степени открытия РКА, если частота вращения двигателя превысит первое значение частоты вращения либо упадет ниже второго значения частоты вращения. Кроме того, изменения параметров работы двигателя могут включать в себя изменение частоты вращения двигателя, причем приоритетное изменение степени открытия может включать в себя закрытие РКА в ответ на изменение частоты вращения двигателя. Изменение частоты вращения двигателя может включать в себя одно из следующих событий: падение частоты вращения двигателя ниже первого значения частоты или превышение частотой вращения двигателя второго значения частоты вращения. Другой пример изменения параметров работы двигателя может содержать изменение давления во впускном коллекторе, причем приоритетное изменение степени открытия может включать в себя закрытие РКА при превышении давлением во впускном коллекторе давления на входе дросселя. В еще одном примере изменение параметров работы двигателя может включать в себя изменение температуры РКА, например, повышение температуры РКА. В этом случае, приоритетное изменение установленной степени открытия может включать в себя закрытие РКА в ответ на превышение пороговой температуры РКА (например, Thresh_T на ФИГ. 7). Контроллер может содержать дополнительные команды для закрытия РКА в случае падения частоты вращения двигателя ниже первого значения частоты, когда транспортное средство находится в неподвижном состоянии (например, когда Vs=0). Иными словами, контроллер может содержать команды не закрывать РКА при падении частоты вращения двигателя ниже первого, нижнего значения частоты (например, Sp_1), если транспортное средство движется.
Алгоритм 800 на ФИГ. 8 иллюстрирует способ определения температуры РКА. А именно, температуру РКА определяют, исходя из величины тока и продолжительности его подачи.
На шаге 802 алгоритм 800 может проверить, была ли дана команда на открытие РКА. Если нет, алгоритм 800 переходит на шаг 804, и температуру РКА не рассчитывают. Если да, то алгоритм 800 переходит на шаг 806 для расчета необходимого напряжения для обеспечения необходимой подачи тока на РКА. Определение необходимого напряжения и необходимой подачи тока на РКА может выполнить алгоритм 900 на ФИГ. 9. А именно, определение необходимых напряжения и величины тока может быть основана на расчетной температуре воздуха под капотом.
На ФИГ. 9 алгоритм 900 иллюстрирует процесс расчета необходимых напряжения и величины тока для срабатывания РКА (например, открытия РКА). На шаге 902 можно определить температуру воздуха под капотом. Температура воздуха под капотом может представлять собой температуру воздуха, окружающего двигатель под капотом транспортного средства. Значение температуры под капотом (рядом с двигателем) можно вывести из показаний различных датчиков. На шаге 904 алгоритм 900 включает в себя использование значений температуры всасываемого воздуха и температуры хладагента двигателя для расчета температуры воздуха под капотом. Измеренное значение температуры всасываемого воздуха можно получить от совмещенного датчика температуры и давления, например, датчика 121 на ФИГ. 1А и 1В, а измеренное значение температуры хладагента двигателя - от датчика температуры хладагента двигателя, например, датчика 112 на ФИГ. 1А и 1В. В одном примере измеренного значения температуры всасываемого воздуха может быть достаточно для определения температуры воздуха под капотом. В другом примере значения температуры всасываемого воздуха и температуры хладагента двигателя могут быть усреднены с весовой функцией для определения температуры воздуха под капотом.
Далее, на шаге 906, можно определить электрическое сопротивление и силовую постоянную. Значение температуры воздуха под капотом, полученное на шаге 902, можно использовать в качестве опорного для расчета электрического сопротивления и силовой постоянной, возникающих из-за взаимодействия катушки в электромагните РКА. На шаге 908 можно определить необходимую величину тока в зависимости от силовой постоянной, а также необходимого напряжения, значение которого можно получить из расчетного значения электрического сопротивления. Расчетное значение силовой постоянной для электромагнита в РКА позволяет получить значение минимально необходимой подачи тока для удержания клапана открытым, преодолевая сопротивление пружины в электромагнитном клапане. Кроме того, значения электрического сопротивления и необходимой величины тока позволяют определить необходимое напряжение в соответствии с законом Ома.
В одном примере РКА может быть выполнен с пружиной, удерживающей клапан в первом положении, и электромагнитом, преодолевающим сопротивление пружины. Электромагниты способны создавать силу, прямо пропорциональную подаваемому электрическому току. Кроме того, в целях экономии средств можно использовать формирователи циклического выходного сигнала, управляемые напряжением, а не формирователи выходного сигнала, управляемые током. Получив расчетное значение электрического сопротивления электромагнита, можно использовать циклический выходной сигнал напряжения для регулирования подачи тока (поскольку значение сопротивления с достаточной уверенностью известно). Из уровня техники также хорошо известно, что изменение температуры вызывает изменение сопротивления. Следовательно, если вывести значение температуры РКА, можно определить сопротивление электромагнита и использовать необходимое циклическое напряжение для открытия РКА или удержания его в открытом положении. Таким образом, если использовать электроэнергию в меньшем, но все же эффективном количестве, можно обеспечить экономию энергопотребление и снизить нагрев РКА.
С учетом вышесказанного, следует понимать, что применяя результат расчета, например, представленного на ФИГ. 9, можно эффективнее регулировать положение РКА с меньшими энергозатратами. Кроме того, температура РКА не будет значительно повышаться, благодаря чему можно уменьшить продолжительность периодов, когда РКА отключают (и закрывают) для охлаждения до приемлемой рабочей температуры.
Возвращаясь к шагу 806 алгоритма 800 на ФИГ. 8, на котором после получения значений необходимого напряжения и тока алгоритм 800 переходит к шагу 808 для расчета температуры РКА. В основе способа расчета лежат величина тока, количество тепла, поглощаемого РКА, и тепла, рассеиваемого в окружающую среду. Для расчета температуры РКА можно использовать следующее уравнение:
где
Q может представлять тепло, I может представлять ток, R может представлять электрическое сопротивление, t может представлять время и Th может представлять сосредоточенную временную постоянную теплопередачи.
Таким образом, для определения температуры РКА можно использовать значения полного электрического сопротивления и его теплопроводность в окружающую среду.
Итак, пример способа для двигателя с наддувом может содержать увеличение степени открытия отсечного клапана аспиратора (ОКА) для пропуска эжектирующего потока через аспиратор, если частота вращения двигателя находится между первым, нижним значением частоты и вторым, верхним значением частоты. В этом случае, в основе первого, нижнего значение частоты может лежать предел перегрузки трансмиссии, а в основе второго, верхнего значения частоты - частота отсечки по тахометру. Способ может также содержать закрытие ОКА, когда частота вращения двигателя падает ниже первого, нижнего значения частоты, и когда частота вращения двигателя превышает второе, верхнее значение. ОКА можно открывать путем подачи тока на ОКА и закрывать, прекращая подачу тока. Способ может содержать определение напряжения и величины тока для открытия ОКА в зависимости от полученного значения температуры воздуха под капотом, при этом значение температуры воздуха под капотом получают на основе показаний одного или нескольких датчиков. Способ может также содержать закрытие ОКА при превышении порогового значения температуры ОКА. Температура ОКА может зависеть от количества тепла, создаваемого током, подаваемым на ОКА, и количества тепла, рассеиваемого ОКА. Способ может также содержать закрытие ОКА, если в режиме с наддувом давление во впускном коллекторе превысит давление на входе дросселя. Следует понимать, что раскрытый выше пример способа может быть предназначен для двигателя с наддувом в системе гибридного транспортного средства.
Обратимся к ФИГ. 10 (включая ФИГ. 10A и 10В), иллюстрирующей пример алгоритма 1000 регулирования положения регулирующего клапана аспиратора (РКА) в случае диагностирования какого-либо условия неисправности двигателя и в случае работы двигателя с параметрами, измененными из-за диагностированного условия неисправности двигателя. А именно, положение РКА может зависеть от того, как изменились параметры работы двигателя при измененной работе двигателя.
Как раскрыто выше для алгоритма 300 на ФИГ. 3, в результате выявления неисправности двигателя и (или) его компонента, контроллер может установить диагностический код неисправности (ДКН). Кроме того, в зависимости от того, какая неисправность двигателя и (или) его компонента была выявлена, контроллер может управлять работой двигателя в режиме коррекции, обеспечивающем поддержание надежной работы двигателя даже после выявления неисправности двигателя. То есть двигатель может работать с измененными параметрами в режиме коррекции. Кроме того, в режиме коррекции РКА можно регулировать иначе, чем тогда, когда работа двигателя более надежна и не выявлено какое-либо условие неисправности.
На шаге 1002 алгоритм 1000 может определить, был ли установлен ДКН. Если нет, алгоритм 1000 переходит к шагу 1004, на котором можно выбрать положение РКА в зависимости от частоты вращения двигателя, температуры РКА и т.п., как раскрыто выше со ссылками на ФИГ. 4, 5, 6 и 7.
В противном случае, если контроллер установил ДКН, алгоритм 1000 переходит на шаг 1006 для определения типа неисправности двигателя. Далее, на шаге 1008, алгоритм 1000 может проверить, был ли выявлен первый тип неисправности двигателя. Например, первый тип неисправности двигателя может включать в себя условия неисправности, значительно не влияющие на работу двигателя. Если да, то алгоритм 1000 переходит на шаг 1009 для активации первого режима коррекции (или режима коррекции №1). Режим коррекции №1 может представлять собой набор рабочих параметров двигателя для его эксплуатации при выявлении первого типа неисправности двигателя (также обозначаемого термином «первое условие неисправности двигателя»). Кроме того, первый тип неисправности двигателя может предусматривать регулирование рабочих параметров двигателя, в результате чего может увеличиться разрежение во впускном коллекторе.
На шаге 1010 можно проверить, содержит ли первое условие неисправности двигателя признаки неисправности датчика МРВ. Если да, то алгоритм 1000 переходит к шагу 1012 для активного регулирования расхода воздуха через впускной дроссель. Расход воздуха также можно снизить, чтобы уменьшить крутящий момент в двигателе. Например, расход воздуха можно снизить, направив команду на уменьшение открытия впускного дросселя. Например, можно направить команду уменьшить степень открытия впускного дросселя до 40% (например, чтобы он был открыт менее, чем наполовину). Также можно установить ограничение для степени открытия впускного дросселя на уровне не более 40%. В другом примере можно задать степень открытия впускного дросселя на уровне 30%. Следует понимать, что степень открытия впускного дросселя может составлять 100%, когда он полностью открыт. Также, степень открытия впускного дросселя, когда он полностью закрыт, может составлять 0%. Следовательно, 30%-ная степень открытия впускного дросселя может представлять собой степень открытия, уменьшенную относительно 100%-ной, при которой впускной дроссель полностью открыт.
Поскольку необходимый расход РОГ можно выбирать в зависимости от показаний датчика МРВ, неисправность датчика МРВ может потребовать остановки потока РОГ на шаге 1014. Например, клапан РОГ (например, клапан 80 РОГ) можно установить в закрытое положение для прекращения потока РОГ во впускной коллектор. Таким образом, в раскрытом выше примере работа двигателя с измененными параметрами при выявлении неисправности датчика МРВ включает в себя уменьшение расхода воздуха через впускной дроссель и закрытие клапана РОГ.
Прекращение потока РОГ может вызвать рост значений разрежения в коллекторе, поскольку в этом случае разрежение во впускной системе не используется для вытягивания части отработавших газов из выпускного канала. Значит, двигатель может создавать достаточное базовое разрежение. В связи с этим, на шаге 1024 алгоритм 1000 может проверить, превышают ли значения разрежения во впускном коллекторе первое пороговое значение T_V. В одном примере пороговое значение T_V может составлять 15 дюймов ртутного столба. В другом примере первое пороговое значение T_V может составлять 17 дюймов ртутного столба. Если значение разрежения во впускном коллекторе ниже первого порогового значения T_V (уровень разрежения во впускном коллекторе ниже T_V), алгоритм 1000 переходит на шаг 1026, на котором положение РКА изменить нельзя, а можно удерживать в текущем положении. Например, РКА можно удерживать в открытом положении, если до этого он был открыт. Следовательно, аспиратор может продолжить создавать разрежение. Далее алгоритм 1000 возвращается на шаг 1024.
Если на шаге 1024 будет установлено, что значение разрежения во впускном коллекторе выше (например, глубже) первого порогового значения T_V, алгоритм 1000 переходит на шаг 1034 для закрытия РКА (или удержания его в закрытом положении). После этого выполнение алгоритма 1000 можно завершить. В этом случае, величина разрежения во впускном коллекторе достаточна для его подачи на какой-либо вакуум-бачок или устройство с вакуумным приводом при необходимости. Кроме того, дополнительный расход воздуха через аспиратор может быть нежелателен, поскольку избыток воздуха может привести к росту крутящего момента. В режиме коррекции или во время работы двигателя с измененными параметрами избыточный крутящий момент может быть нежелателен.
Если на шаге 1010 будет установлено, что характеристики датчика МРВ не ухудшались, алгоритм 1000 переходит к шагу 1016 для определения того, выявлена ли неисправность системы изменения фаз газораспределения (ИФГ). Если да, то алгоритм 1000 переходит на шаг 1018 для регулирования потока всасываемого воздуха в цилиндры путем регулирования положения впускного дросселя. На шаге 1020 систему ИФГ можно возвратить в состояние по умолчанию, а на шаге 1022 можно прекратить дополнительную подачу воздуха во впускной коллектор. В этом случае работа двигателя с измененными параметрами включает в себя отключение системы ИФГ и прекращение дополнительной подачи воздуха во впускной коллектор.
Например, трубу РОГ можно закрыть, блокировав поток РОГ во впускной коллектор, продувочный поток из канистры топливной системы можно прекратить, и (или) можно прекратить поток воздуха из системы принудительной вентиляции картера. Так можно повысить надежность управления работой двигателя.
При прекращении подачи дополнительного воздуха, топливных паров и отработавших газов во впускной коллектор (например, из канистры улавливания топливных паров топливной системы), значения разрежения во впускном коллекторе могут вырасти, так как не используется базовое разрежение для втягивания указанных воздушно-топливных смесей во впускной коллектор. В связи с этим, алгоритм 1000 на шаге 1024 может проверить, превышают ли значения разрежения во впускном коллекторе пороговое значение T_V (например, глубже порогового значения). Если уровень разрежения во впускном коллекторе ниже порогового значения T_V, алгоритм 1000 переходит на шаг 1026, на котором РКА можно удерживать в открытом положении, если он в нем уже находился. Следовательно, аспиратор может продолжить создавать разрежение. Далее алгоритм 1000 возвращается на шаг 1024. Если на шаге 1024 будет установлено, что уровень разрежения во впускном коллекторе выше порогового значения T_V (например, глубже), алгоритм 1000 переходит на шаг 1034 для закрытия РКА (или удержания его в закрытом положении). Так можно определить, что открыть РКА нельзя. После этого можно завершить выполнение алгоритма 1000.
Если на шаге 1016 неисправность системы ИФГ не диагностирована, алгоритм 1000 переходит к шагу 1028 и устанавливает, что выявлен другой тип первого условия неисправности двигателя. Таким образом, алгоритм 1000 описывает два примера первого условия неисправности двигателя: неисправность датчика МРВ и неисправность системы ИФГ. Если ни один из этих двух примеров не выявлен, ухудшение могло коснуться характеристик другого компонента двигателя и может быть определено как первое условие неисправности двигателя. Итак, работа двигателя с измененными параметрами при выявлении первого условия неисправности двигателя может включать в себя рост значений разрежения в коллекторе. В других примерах, уровень базового разрежения во впускном коллекторе может не повышаться в случае работы двигателя с измененными параметрами из-за выявления первого условия неисправности двигателя.
В зависимости от того, какая именно разновидность первого условия неисправности двигателя была выявлена на шаге 1028, можно включить подходящий режим коррекции с другими параметрами работы двигателя. На шаге 1030 алгоритм 1000 может определить, нужно ли закрыть РКА в связи с тем, что двигатель работает с измененными параметрами. Например, режим коррекции, включенный в связи с тем, что на шаге 1028 была определена другая разновидность первого условия неисправности двигателя, может требовать закрытия РКА. Если да, то алгоритм 1000 переходит на шаг 1034, чтобы закрыть РКА или принять решение о невозможности открытия РКА. Если нет, алгоритм 1000 переходит к шагу 1032 для удержания РКА в открытом положении. Вместо этого, алгоритм может определить, что параметры работы двигатель не требуют закрытия РКА.
Следует понимать, что примеры неисправности датчика МРВ и системы ИФГ включены в алгоритм 1000 в качестве примеров первого условия неисправности двигателя, могущего привести к необходимости работы двигателя с измененными параметрами, которые могут вызвать рост значений разрежения в коллекторе. Могут быть выявлены и другие схожие условия неисправности, которые можно отнести к первому типу условия неисправности без отступления от объема настоящего изобретения.
Таким образом, пример системы для двигателя может содержать впускной коллектор двигателя, впускной дроссель, установленный во впускном канале, аспиратор, установленный во впускном канале перепускаемого воздуха параллельно впускному дросселю, регулирующий клапан аспиратора, расположенный ниже по потоку от аспиратора во впускном канале перепускаемого воздуха, для регулирования эжектирующего потока как через аспиратор, так и через впускной канал перепускаемого воздуха, эжектирующий вход аспиратора, соединенный с впускным каналом выше по потоку от впускного дросселя, эжектирующий выход аспиратора, соединенный с впускным каналом ниже по потоку от впускного дросселя, и контроллер с командами, внесенными в постоянное запоминающее устройство и выполняемыми процессором для закрытия регулирующего клапана аспиратора и прерывания создания разрежения аспиратором при выявлении первого условия неисправности двигателя. При первом условии неисправности двигателя может произойти превышение первого порогового значения разрежения во впускном коллекторе. Например, коррекция первого условия неисправности двигателя, как в алгоритме 1000, может подразумевать рост значений разрежения во впускном коллекторе, как раскрыто на шаге 1024. Рост разрежения может быть связан с прекращением одного или нескольких из следующих потоков: РОГ, потока продувки канистры улавливания топливных паров и потока ПВК. В одном примере первое условие неисправности двигателя включать в себя неисправность датчика массового расхода воздуха (МРВ) (как раскрыто в алгоритме 1000). В другом примере первое условие неисправности двигателя может включать в себя неисправность системы изменения фаз газораспределения (ИФГ).
Если на шаге 1008 будет установлено, что выявленная неисправность двигателя не относится к первому типу, алгоритм 1000 переходит на шаг 1036, чтобы определить, чтобы была выявлена неисправность двигателя второго типа. Например, второй тип неисправности двигателя может включать в себя условия неисправности, серьезно влияющие на работу двигателя. Далее, на шаге 1037, можно включить второй режим коррекции (например, режим коррекции №2). Режим коррекции №2 может представлять собой набор параметров для работы двигателя при выявлении второго типа неисправности двигателя (также именуемое «второе условие неисправности двигателя»). В одном примере второй тип неисправности двигателя может предусматривать регулирование рабочих параметров двигателя, в результате чего может уменьшиться разрежение во впускном коллекторе (или вырасти давление во впускном коллекторе). Следует понимать, что режим коррекции №2 может быть отличен от режима коррекции №1 на шаге 1009.
На шаге 1038 можно установить, включает ли в себя второе условие неисправности двигателя заклинивание впускного дросселя в открытом положении. Например, дроссель может заклинить в полностью или почти полностью открытом положении, при этом на впуск двигателя может поступать значительный поток воздуха. Если да, то алгоритм 1000 переходит на шаг 1040 для отключения и обесточивания нескольких датчиков и исполнительных механизмов. В одном примере клапан РОГ можно отключить в закрытом положении. Кроме того, можно игнорировать показания датчика РОГ. Датчик РОГ также можно обесточить. В другом варианте при выявлении заклинивания дросселя контроллер может игнорировать показания других датчиков. Далее, на шаге 1042 работу двигателя (например, создаваемый крутящий момент) можно корректировать, регулируя впрыск топлива и (или) угол опережения зажигания. Например, угол опережения зажигания можно уменьшить для уменьшения крутящего момента двигателя. В другом примере можно уменьшить впрыск топлива для уменьшения крутящего момента двигателя. Итак, работа двигателя с измененными параметрами в случае диагностирования заклинивания впускного дросселя в открытом положении может включать в себя работу двигателя с измененным углом опережения зажигания и (или) измененным впрыском топлива (например, моментом впрыска, шириной импульса и т.п.).
Далее, на шаге 1052 алгоритм 1000 может определить, упали ли значения разрежения в коллекторе ниже второго порогового значения T_L. Поскольку впускной дроссель заклинило в открытом положении, давление во впускном коллекторе может вырасти, что приведет к снижению уровня разрежения в коллекторе. В одном примере второе пороговое значение T_L может составлять 5 дюймов ртутного столба. В другом примере второе пороговое значение T_L может равняться атмосферному давлению. Если будет установлено, что уровень разрежения в коллекторе превышает второе пороговое значение T_L, алгоритм 1000 переходит на шаг 1054 для удержания РКА в текущем положении. В одном примере РКА может быть закрыт и, следовательно, его можно удерживать в закрытом положении на шаге 1054. Напротив, если будет установлено, что уровень разрежения во впускном коллекторе упал ниже второго порогового значения T_L, алгоритм 1000 переходит к шагу 1062, чтобы установить, что РКА можно открыть. Таким образом, РКА можно установить в открытое положение, в том числе полностью или в почти полностью открытое. Следовательно, при повышении давления в коллекторе и соответствующем снижении уровня разрежения во впускном коллекторе, РКА можно открыть для создания разрежения. А именно, степень открытия РКА можно увеличить в ответ на заклинивание впускного дросселя в открытом положении.
Если на шаге 1038 будет установлено, что впускной дроссель не заклинило в открытом положении, алгоритм 1000 переходит на шаг 1044 для проверки на предмет неисправности датчика положения дросселя ДПД (TPS). ДПД направляет контроллеру сигнал положения впускного дросселя (например, датчик 58 на ФИГ. 1А и 1В). Если да, то алгоритм 1000 переходит на шаг 1046 для удержания впускного дросселя в почти полностью открытом положении. Например, впускной дроссель можно установить в почти полностью открытое положение, в котором степень открытия впускного дросселя будет увеличена. Например, процентная степень открытия впускного дросселя может составлять 75%. В другом примере процентная степень открытия дросселя может составлять 85%. Кроме того, впускной дроссель можно зафиксировать в таком положении, блокировав возможность его изменения в сторону уменьшения степени открытия впускного дросселя.
Как указано выше, степень открытия впускного дросселя может составлять 100%, когда он открыт полностью. Также, степень открытия впускного дросселя может составлять 0%, когда он полностью закрыт. Таким образом, 85%-ное открытие впускного дросселя может представлять собой значительно увеличенную степень открытия относительно 0%, когда впускной дроссель полностью закрыт.
Поскольку неисправность датчика ДПД делает его показания бесполезными, контроллер может установить впускной дроссель в почти полностью открытое положение для подачи достаточного количества воздуха в цилиндры двигателя. При удерживании впускного дросселя в почти полностью открытом (или полностью открытом) положении, двигатель может продолжить создавать достаточный крутящий момент. Таким образом, крутящий момент двигателя можно регулировать путем уменьшения впрыска топлива и (или) изменения угла опережения зажигания. Далее, на шаге 1048 можно отключить различные датчики и исполнительные механизмы. Например, можно отключить и установить в закрытое положение клапан РОГ, прекратив поток РОГ, при выявлении второго условия неисправности двигателя. Кроме того, можно игнорировать показания нескольких датчиков. Например, можно игнорировать показания датчика РОГ. Далее, на шаге 1050 можно регулировать создание крутящего момента, изменяя угол опережения зажигания и (или) впрыск топлива. Таким образом, режим коррекции в случае выявления неисправности датчика ДПД может включать в себя изменение положения впускного дросселя для увеличения расхода воздуха, а также изменение угла опережения зажигания и впрыска топлива, помимо прочих параметров, для регулирования крутящего момента.
Далее, алгоритм 1000 переходит к шагу 1052, на котором он может проверить, упал ли уровень разрежения в коллекторе ниже второго порогового значения T_L. В этом случае, поскольку впускной дроссель удерживают открытым, давление во впускном коллекторе может вырасти (например, до уровня атмосферного давления), что приведет к снижению уровня разрежения в коллекторе. В одном примере второе пороговое значение Т_L может составлять 3 дюйма ртутного столба. В другом примере второе пороговое значение Т_L может составлять 5 дюймов ртутного столба. Если будет установлено, что уровень разрежения в коллекторе превышает второе пороговое значение T_L (или глубже его), алгоритм 1000 переходит на шаг 1054 для удержания РКА в текущем положении. В одном примере РКА может находиться в закрытом положении, следовательно, на шаге 1054 его можно удерживать в закрытом положении. В другом примере, если РКА бесступенчато-регулируемый, РКА может находиться в частично открытом положении. В этом случае РКА можно удерживать в этом частично открытом положении.
Напротив, если на шаге 1052 будет установлено, что уровень разрежения во впускном коллекторе упал ниже второго порогового значения T_L, алгоритм 1000 переходит к шагу 1062, чтобы определить, что РКА можно открыть. Таким образом, РКА можно установить в открытое положение, включая полностью открытое и почти полностью открытое. Например, если на шаге 1062 исходным положением РКА является частично открытое, РКА можно установить в полностью открытое положение. Таким образом, в качестве реакции на повышение давления в коллекторе (и связанное с ним снижение уровня разрежения во впускном коллекторе), РКА можно открыть для создания разрежения. А именно, степень открытия РКА можно увеличить при выявлении неисправности датчика положения дросселя.
На шаге 1044, если неисправность ДПД не диагностирована, алгоритм 1000 переходит к шагу 1056 и определяет, что была выявлена другая разновидность второго условия неисправности двигателя. Таким образом, алгоритм 1000 описывает два примера второго условия неисправности двигателя: неисправность ДПД и заклинивание впускного дросселя в открытом положении. Если ни один из этих примеров не выявлен, возможно, имеет место неисправность другого компонента двигателя. Например, второе условие неисправности двигателя может включать в себя неисправность одного или нескольких датчиков, чьи сигналы используют в алгоритме управления РКА (например, алгоритме 300 на ФИГ. 3). В качестве примера, второе условие неисправности двигателя может включать в себя неисправность датчика частоты вращения двигателя (или частоты вращения коленчатого вала). В вариантах осуществления на ФИГ. 1А и 1В, частоту вращения двигателя можно измерять с помощью датчика 118 на эффекте Холла (или другого типа), связанного с коленчатым валом 40. Неисправность датчика 118 на эффекте Холла может отрицательно повлиять на управление РКА, поскольку положение РКА можно выбирать в зависимости от частоты вращения двигателя (например, алгоритм 600 на ФИГ. 6). В качестве другого примера, неисправность датчика абсолютного давления в коллекторе (ДВК) (например, датчика 122 на ФИГ. 1А и 1В) также можно считать вторым условием неисправности двигателя. Неисправность датчика частоты вращения двигателя или датчика ДВК может отрицательно повлиять на регулирование положения РКА.
Параметры работы двигателя можно изменить при выявлении второго условия неисправности двигателя, причем второе условие неисправности двигателя включает в себя неисправность одного или нескольких датчиков, показания которых используют для управления РКА. Если на шаге 1056 будет выявлена другая разновидность второго условия неисправности двигателя, на шаге 1056 также можно включить подходящий режим коррекции с другими рабочими параметрами двигателя. Работа двигателя с измененными параметрами может привести к снижению уровня разрежения в коллекторе. На шаге 1058 алгоритм 1000 может определить, нужно ли открыть РКА в связи с изменением параметров работы двигателя. Например, режим коррекции, включаемый при выявлении другого типа второго условия неисправности двигателя, может требовать открытия РКА. Точнее, поскольку выбор положения РКА в значительной степени зависит от показаний одного или нескольких датчиков (например, датчиков частоты вращения двигателя, ДВК, ТВВ), неисправность одного или нескольких из этих датчиков может привести к увеличению степени открытия РКА. Еще точнее, РКА нельзя будет удерживать в полностью закрытом положении при ухудшении характеристик одного или нескольких датчиков, чьи показания используют в алгоритме управления РКА. В одном примере РКА можно установить в серединное положение между полностью открытым и полностью закрытым. В другом примере РКА можно установить в почти полностью открытое положение.
Если на шаге 1058 будет установлена возможность открытия РКА, алгоритм 1000 переходит на шаг 1062, чтобы определить, что РКА можно открыть. Следовательно, степень открытия РКА можно увеличить. Если нет, алгоритм 1000 переходит к шагу 1060 для удержания РКА в закрытом положении. Вместо этого, на шаге 1060 алгоритм может определить, что режим работы двигателя не требует открытия РКА.
Следует понимать, что примеры заклинивания впускного дросселя в открытом положении и неисправности ДПД включены в алгоритм 1000 в качестве примеров второго условия неисправности двигателя, могущих потребовать изменения параметров работы двигателя, результатом которого может стать падение разрежения в коллекторе. Возможны и другие схожие условия неисправности, которые можно отнести к второму типу условия неисправности без отступления от объема настоящего изобретения.
Итак, пример способа для двигателя может содержать открытие отсечного клапана аспиратора в случае диагностирования какого-либо условия неисправности двигателя, при этом условие неисправности двигателя включает в себя падение разрежения во впускном коллекторе до значения ниже порогового. Пример способа также может содержать изменение параметров работы двигателя в случае диагностирования условия неисправности двигателя. Как раскрыто в алгоритме 1000, в случае выявления второго условия неисправности двигателя можно изменить впрыск топлива или угол опережения зажигания. Один пример условия неисправности двигателя может включать в себя заклинивание впускного дросселя в почти полностью открытом положении. Другой пример условия неисправности двигателя может включать в себя неисправность датчика положения впускного дросселя.
Следует отметить, что примеры неисправности, раскрытые выше, и соответствующее изменение параметров работы двигателя, могут относиться к безнаддувному двигателю, например, двигателю 10 на ФИГ. 1А. Несмотря на то, что пример алгоритма 1000 иллюстрирует два типа неисправности двигателя (первый и второй), возможны дополнительные типы, могущие предусматривать другие изменения параметров работы двигателя.
Так, другой пример способа для двигателя может содержать закрытие регулирующего клапана аспиратора (РКА) в случае диагностирования первого условия неисправности двигателя и открытие РКА в случае диагностирования второго условия неисправности двигателя, причем второе условие неисправности двигателя отличается от первого условия неисправности двигателя. При первом условии неисправности двигателя может произойти превышение первого порогового значения разрежения во впускном коллекторе. Примером первого условия неисправности двигателя может быть неисправность датчика массового расхода воздуха (МРВ). Способ может также содержать прекращение потока рециркуляции отработавших газов (РОГ) при выявлении неисправности датчика МРВ. Второй пример первого условия неисправности двигателя может включать в себя неисправность системы изменения фаз газораспределения. Кроме того, второе условие неисправности двигателя может включать в себя падение разрежения во впускном коллекторе ниже второго порогового значения. Пример второго условия неисправности двигателя может содержать заклинивание впускного дросселя в почти полностью открытом условии. Способ может также содержать изменение одного или нескольких из следующих параметров - впрыска топлива и угла опережения зажигания - в случае заклинивания впускного дросселя в почти полностью открытом положении. Другой пример второго условия неисправности двигателя может содержать неисправность датчика положения впускного дросселя. Еще один пример второго условия неисправности двигателя может содержать неисправность одного или нескольких датчиков, чьи показания используют в алгоритме управления РКА. Примеры датчиков, о которых идет речь, могут включать в себя датчик частоты вращения двигателя и (или) датчик ДВК. РКА можно установить в обводном канале параллельно впускному дросселю, при этом обводной канал содержит аспиратор. В одном примере РКА может быть бесступенчато-регулируемым. В другом примере РКА может быть двухпозиционным.
Пример регулирования положения ОКА показан на ФИГ. 11. В примере на ФИГ. 11 положение ОКА регулируют в зависимости от частоты вращения двигателя и температуры ОКА. На схеме 1100 представлено состояние ОКА на кривой 1102, температура ОКА на кривой 1104 и частота вращения двигателя на кривой 1106. Значения времени нанесены на оси x, увеличиваясь слева направо по оси x. ОКА показан в виде двухпозиционного клапана, который можно устанавливать либо в полностью открытое, либо в полностью закрытое положение. ОКА может представлять собой электриводной электромагнитный клапан. В других вариантах осуществления ОКА может представлять собой бесступенчато-регулируемый клапан с возможностью принимать промежуточные положения между полностью открытым и полностью закрытым. Далее, линия 1103 представляет пороговое значение температуры (например, Thresh_T на ФИГ. 7). Линия 1107 представляет первое, нижнее значение частоты вращения (например, Sp_1 на ФИГ. 5 и 6), а линия 1105 представляет второе, верхнее значение частоты, например, Sp_2 на ФИГ. 5 и 6. Как указано выше, в основе первого, нижнего значения частоты (Sp_1) может лежать предел перегрузки трансмиссии, а в основе второго, верхнего значение частоты (Sp_2) может лежать частота отсечки по тахометру для данного двигателя. ОКА можно установить как в системе безнаддувного двигателя, так и в системе двигателя с наддувом, как в гибридном транспортном средстве, так и в не-гибридном транспортном средстве.
Между t0 и t1 двигатель может работать на холостом ходу как следует из графика частоты вращения двигателя на скорости холостого хода. В одном примере двигатель мог быть запущен из холодного состояния. ОКА можно закрыть, когда двигатель работает на холостом ходу (график 1102), в частности, при проворачивании коленвала непрогретого двигателя, для стабилизации воздушно-топливного отношения. Также, поскольку ОКА является электроприводным, удерживая его в закрытом положении можно уменьшить потребление тока из аккумуляторной батареи, когда ее заряженность во время холодного запуска понижена. Как указано выше, нормальным положением ОКА может быть закрытое, при котором ток на ОКА не подают. Соответственно, между t0 и t1 температура ОКА понижена.
На t1 частота вращения двигателя может резко вырасти во время разгона транспортного средства. Так как частота вращения двигателя в это время превышает первое, нижнее значение частоты (линия 1107), оставаясь ниже второго, верхнего значения частоты (линия 1105), ОКА можно открыть на t1. Так как ОКА теперь установлен в открытое положение путем подачи на него тока, его температура может постепенно повышаться как следует из графика 1104. На t2 температура ОКА может достичь пороговой (линия 1103). При достижении пороговой температуры ОКА, его можно закрыть на t2, прекратив подачу тока на ОКА. ОКА можно закрыть на t2, даже если частота вращения двигателя находится в желаемом диапазоне, например, между первым, нижним и вторым, верхним значением частоты. Таким образом, положение ОКА, выбранное в зависимости от частоты вращения двигателя, можно в приоритетном порядке изменить в связи превышением порогового значения температуры ОКА. На t2 ОКА можно на некоторое время оставить в состоянии покоя для охлаждения. Соответственно, температура ОКА может снизиться после t2.
На t3 частота вращения двигателя также падает ниже первого, нижнего значения частоты (линия 1107), возможно, в связи с замедлением хода транспортного средства. Далее, между t3 и t4, двигатель может вращаться на скорости холостого хода. В связи с тем, что частота вращения двигателя находится ниже предела первого, нижнего значения частоты, ОКА удерживают закрытым. На t4 частота вращения двигателя резко увеличивается и мгновенно достигает второго, верхнего значения частоты, как показано на шаге 1111. Следовательно, ОКА нельзя открыть до тех пор, пока частота вращения двигателя не стабилизируется между первым, нижним и вторым, верхним значением частоты, как на t5. Следует отметить, что на t5 температура ОКА также ниже порогового значения температуры, что позволяет подать ток на ОКА для открытия ОКА. ОКА можно удерживать открытым и после t5, так как частота вращения двигателя остается между первым, нижним и вторым, верхним значениями частоты, а температура ОКА также остается ниже порогового значения.
Итак, пример способа управления регулирующим клапаном аспиратора (РКА) может содержать изменение степени открытия РКА в зависимости от частоты вращения двигателя, и изменение в приоритетном порядке выбранной таким образом степени открытия в случае изменения параметров работы двигателя. Например, изменение может включать в себя увеличение степени открытия РКА, если частота вращения двигателя превысит первое значение частоты вращения (Sp_1) или упадет ниже второго значения частоты вращения (Sp_2). В одном примере изменение параметров работы двигателя может включать в себя изменение частоты вращения двигателя, при этом приоритетное изменение установленной степени открытия включает в себя закрытие РКА в связи с изменением частоты вращения двигателя (например, на t3 схемы 1100). Изменение частоты вращения двигателя может включать в себя либо падение ниже первого значения частоты вращения, либо превышение второго значения частоты вращения. В другом примере изменение параметров работы двигателя может включать в себя превышение порогового значения температуры ОКА, при этом приоритетное изменение установленной степени открытия включает в себя закрытие ОКА. А именно, ОКА можно установить в полностью закрытое положение (либо из почти полностью открытого, либо из полностью открытого положения) в случае превышения пороговой температуры РКА.
На ФИГ. 12 изображен пример изменения положения РКА в зависимости от частоты вращения двигателя и изменений давления в коллекторе. На схеме 1200 показаны: состояние РКА на кривой 1202, давление в коллекторе (ДВК) на кривой 1204, давление на входе дросселя (ДВД) на кривой 1206 (коротким пунктиром) и частота вращения двигателя на кривой 1208. Значения времени нанесены на оси x, увеличиваясь слева направо по оси x. В данном примере ОКА показан в виде двухпозиционного клапана, который можно устанавливать либо в полностью открытое, либо в полностью закрытое положение. В других вариантах осуществления ОКА может представлять собой бесступенчато-регулируемый клапан с возможностью принимать промежуточные положения между полностью открытым и полностью закрытым. Далее, линия 1205 представляет барометрическое давление (БД), линия 1209 представляет первое, нижнее значение частоты (например, Sp_1 на ФИГ. 5 и 6), а линия 1207 представляет второе, верхнее значение частоты, например, Sp_2 на ФИГ. 5 и 6. Как указано выше, в основе первого, нижнего значения частоты (Sp_1) может лежать предел перегрузки трансмиссии, а в основе второго, верхнего значение частоты (Sp_2) может лежать частота отсечки по тахометру для данного двигателя. В данном примере РКА можно установить в системе двигателя с наддувом как в гибридном транспортном средстве, так и в не-гибридном транспортном средстве.
Между t0 и t1, двигатель может работать на холостом ходу как следует из графика 1208. РКА можно закрыть, когда двигатель работает в режиме холостого хода (график 1202), чтобы поддержать расход воздуха, необходимый для стабилизации воздушно-топливного отношения и выбросов. Поскольку двигатель работает на холостом ходу, впускной дроссель можно закрыть, что приведен к падению давления в коллекторе (график 1204). Также, ДВД может равняться или почти равняться атмосферному давлению (как следует из графика 1206 и линии 1205), поскольку наддув двигателя может не осуществляться в режиме холостого хода. Таким образом, ДВД (график 1206) превышает ДВК (график 1204) между t0 и t1.
На t1 частота вращения двигателя может резко повышаться, в результате чего растет крутящий момент двигателя, который можно использовать для приведения в движение транспортного средства. Например, транспортное средство может разгоняться, чтобы слиться с потоком транспорта на автомагистрали. В связи с этим, в это время можно осуществлять наддув двигателя, в результате чего повысится ДВД, а также ДВК. В этот период и ДВД, и ДВК могут превышать барометрическое давление. В изображенном примере впускной дроссель может находиться в почти полностью открытом состоянии, благодаря чему ДВК может по существу равняться ДВД. Также, на t1 можно открыть РКА, так как частота вращения двигателя превышает первое, нижнее значение частоты (линия 1209) и ниже второго, верхнего значения частоты (линия 1207). Поскольку уровень разрежения во впускном коллекторе может быть понижен из-за работы двигателя с наддувом, открытие РКА может обеспечить возможность создания разрежения. Частота вращения двигателя держится между первым, нижним значением и вторым, верхним значением между t1 и t2, поэтому в этот период РКА можно удерживать открытым. Соответственно, поскольку РКА удерживают открытым, эжектирующий поток можно направить через аспиратор из области ниже по потоку от компрессора (и выше по потоку от впускного дросселя). Далее, разрежение, созданное на горловине аспиратора можно подать в тормозной гидроаккумулятор и вакуум-бачок.
Между t1 и t2 режим наддува можно стабилизировать, и ДВК может приблизительно равняться ДВД или быть ниже ДВД. На t2 величину наддува можно уменьшить, при этом частота вращения двигателя слегка снижается, но держится между первым, нижним значением частоты (линия 1209) и вторым, верхним значением частоты (линия 1207). При выходе двигателя из режима наддува, ДВД может падать быстрее и может по существу сравняться с БД на t2. Однако ДВК может падать медленнее, чем ДВД. Следовательно, между t2 и t3 ДВК может превышать ДВД. Также, когда ДВК превышает ДВД (и, как показано, БД), растет вероятность рециркуляции загрязненного воздуха и образования отложений в областях впускной системы с относительно низкими температурами. Поэтому на t2 РКА закрывают, пока ДВК не упадет ниже ДВД на t3. РКА можно открыть на t3, когда ДВД превысит ДВК. РКА можно удерживать открытым для создания разрежения, пока частота вращения двигателя держится между первым, нижним значением частоты и вторым, верхним значением частоты. Если ДВК превышает ДВД, положение РКА изменяют в приоритетном порядке, и устанавливают РКА в закрытое положение (например, полностью закрытое) из открытого (например, полностью) положения.
Схема 1300 на ФИГ. 13 изображает пример изменения положения РКА в зависимости от частоты вращения двигателя и при выявлении условий неисправности двигателя. При выявлении неисправности двигателя может быть включен режим работы двигателя с измененными параметрами, при этом изменять можно различные параметры. Работа двигателя с измененными параметрами также может обозначаться термином «режим коррекции». Соответственно, РКА можно устанавливать в различные положения в зависимости от того, какие именно параметры работы двигателя изменены. Схема 1300 изображает состояние РКА на кривой 1302, тип условия неисправности двигателя на кривой 1304, уровни разрежения в коллекторе на кривой 1306, положение клапана РОГ на кривой 1308, положение впускного дросселя на кривой 1310 и частоту вращения двигателя на кривой 1312. Значения времени нанесены на оси x, увеличиваясь слева направо по оси x. В данном примере ОКА может представлять собой бесступенчато-регулируемый клапан с возможностью принимать промежуточные положения между полностью открытым и полностью закрытым. В другом варианте ОКА может представлять собой двухпозиционный клапан с возможностью установки либо в полностью открытое, либо в полностью закрытое положение. Далее, линия 1305 представляет первое пороговое значение разрежения во впускном коллекторе (например, первое пороговое значение T_V на ФИГ. 10), линия 1307 представляет второе пороговое значение разрежения во впускном коллекторе (например, второе пороговое значение T_L на ФИГ. 10), линия 1313 представляет первое, нижнее значение частоты вращения двигателя (например, Sp_1 на ФИГ. 5 и 6), а линия 1311 представляет второе, верхнее значение частоты вращения двигателя, например, Sp_2 на ФИГ. 5 и 6. Как указано выше, в основе первого, нижнего значения частоты вращения двигателя (Sp_1) может лежать предел перегрузки трансмиссии, а в основе второго, верхнего значения частоты вращения двигателя (Sp_2) может лежать частота отсечки по тахометру для данного двигателя. В данном примере РКА можно установить в системе безнаддувного двигателя как в гибридном транспортном средстве, так и в не-гибридном транспортном средстве.
Между t0 и t1 частота вращения двигателя может представлять собой частоту вращения холостого хода, при этом впускной дроссель находится в более закрытом положении (например, полностью закрыт). Соответственно, значения разрежения во впускном коллекторе могут быть значительно повышены (или глубже). В режиме холостого хода клапан РОГ можно закрыть. РКА также можно закрыть потому, что двигатель работает на холостом ходу (для снижения риска ошибок в воздушно-топливном отношении) и потому, что уровень разрежения во впускном коллекторе является достаточным. Далее, между t0 и t1 неисправностей двигателя не выявлено.
На t1 частота вращения двигателя быстро растет в связи с возникновением потребности в крутящем моменте для приведения транспортного средства в движение из неподвижного состояния. Впускной дроссель может находиться в широко открытом положении (или значительно открытом положении, как следует из графика 1310) для обеспечения существенного потока воздуха. Клапан РОГ можно закрыть, когда дроссель широко открыт (график 1308). Тем не менее, на t2 РКА можно открыть, поскольку частота вращения двигателя находится между первым, нижним значением частоты и вторым, верхним значение частоты. Кроме того, когда дроссель широко открыт, может наблюдаться быстрое снижение уровня разрежения в коллекторе.
Между t1 и t2 впускной дроссель можно установить в промежуточное положение между широко открытым и скорее закрытым (например, посередине между полностью открытым и полностью закрытым), при этом уровни разрежения во впускном коллекторе могут стабилизироваться, а частота вращения двигателя может установиться между первым, нижним значением (линия 1313) и вторым, верхним значением частоты (линия 1311). РКА можно удерживать в открытом положении для создания разрежения, поскольку уровни разрежения во впускном коллекторе понижены. Между t1 и t2, по мере стабилизации частоты вращения двигателя, клапан РОГ можно открыть, чтобы уменьшить выбросы NOx. По мере постепенного открытия клапана РОГ, разрежение во впускном коллекторе может уменьшиться, так как разрежение в коллекторе служит для втягивания отработавших газов рециркуляции во впускную систему. Как показано на схеме, на t2 разрежение во впускном коллекторе может по существу достичь второго порогового значения (линия 1307).
На t2 контроллер может выявить первое условие неисправности двигателя (график 1304). В одном примере неисправность может быть выявлена в датчике МРВ. В другом примере может быть выявлена неисправность системы ИФГ. В связи с этим, впускной дроссель можно постепенно переводить в более закрытое положение, уменьшая поток воздуха. Следует отметить, что впускной дроссель закрывают не полностью. Как указано выше, степень открытия впускного дросселя может составлять 40%. В другом примере степень открытия впускного дросселя может составлять 30%. Частота вращения двигателя может постепенно снижаться, при этом оставаясь между первым, нижним значением частоты и вторым, верхним значением частоты. При выявлении первого условия неисправности двигателя, клапан РОГ также можно закрыть (график 1308) на t2 для уменьшения избыточной подачи воздуха во впускную систему. В результате установки впускного дросселя в более закрытое положение и закрытия клапана РОГ, уровни разрежения во впускном коллекторе постепенно растут, так что на t3 разрежение во впускном коллекторе может превысить первое пороговое значение (линия 1305). Поскольку уровень разрежения во впускном коллекторе достаточен, а избыточная подача воздуха может быть нежелательна, на t3 РКА можно закрыть и далее удерживать закрытым.
Между t4 и t5 может пройти некоторое время, в течение которого первое условие неисправности двигателя может быть устранено и исправлено. Например, неисправные датчики или системы можно отремонтировать. Следовательно, на t5 может иметь место другой цикл езды с исправным двигателем. Между t5 и t6 частота вращения двигателя ниже первого, нижнего значения частоты (линия 1313), а впускной дроссель находится в более закрытом положении. Соответственно, уровень разрежения во впускном коллекторе повышен (например, разрежение глубже), а РКА закрыт, так как частота вращения двигателя ниже первого, нижнего значения частоты. Клапан РОГ закрыт, и никакой неисправности не выявлено.
На t6 частота вращения двигателя постепенно растет и стабилизируется между первым, нижним значением частоты и вторым, верхним значением частоты, когда впускной дроссель установлен в промежуточном положении между почти полностью открытым и почти полностью закрытым. Как показано на фигуре, впускной дроссель можно перевести в умеренно открытое положение из более закрытого на t5. В то же время, из-за увеличения степени открытия впускного дросселя, между t6 и t7 уровни разрежения во впускном коллекторе могут снизиться, и РКА можно открыть для создания разрежения. Как раскрыто в данном примере, РКА можно открыть частично так, что РКА сможет находиться в промежуточном положении между полностью открытым и полностью закрытым. Это возможно для бесступенчато-регулируемого РКА. В другом варианте, если РКА является двухпозиционным, его можно установить в полностью открытое положение, как показано пунктирной линией 1303. Таким образом, открытие РКА между первым, нижним значением частоты и вторым, верхним значением частоты позволяет избежать негативного влияния избыточной подачи воздуха на регулирование воздушно-топливного отношения. Клапан РОГ можно постепенно открывать после t6.
На t7 контроллер может выявить второе условие неисправности двигателя и выдать соответствующий сигнал (график 1304). В раскрываемом примере второе условие неисправности двигателя может включать в себя заклинивание впускного дросселя в открытом положении (график 1310). В другом примере второе условие неисправности двигателя может включать в себя обнаружение неисправности датчика положения дросселя, например, датчика 58 на ФИГ. 1А и 1В.
По сигналу второго условия неисправности двигателя на t7 можно перевести двигатель в режим работы с измененными параметрами, при этом параметры работы двигателя можно изменить таким образом, чтобы обеспечить надежное функционирование двигателя. Например, поскольку впускной дроссель заклинило в почти полностью открытом положении, и он пропускает большее количество воздуха в двигатель, создаваемый крутящий момент можно регулировать, изменяя угол опережения зажигания и (или) впрыск топлива (например, момент впрыска, длительность импульса впрыска и т.п.). Далее, по сигналу второго условия неисправности двигателя, на t7 клапан РОГ можно закрыть. Так как параметры работы двигателя, а также угол опережения зажигания и (или) впрыск топлива, изменены, частота вращения двигателя может снизиться после t7. Тем не менее, частота вращения двигателя может остаться выше первого, нижнее значения частоты. Далее, поскольку впускной дроссель почти полностью открыт, разрежение во впускном коллекторе может упасть ниже второго порогового значения (линия 1307). В случае снижения уровня разрежения во впускном коллекторе ниже второго порогового значения на t7, РКА можно открыть (или удерживать открытым) для создания разрежения. Как показано на схеме 1300, РКА можно установить в полностью открытое положение на t7. Это возможно для бесступенчато-регулируемого РКА.
Итак, пример способа для двигателя может содержать определение первого положения отсечного клапана аспиратора (ОКА) в зависимости от частоты вращения двигателя и изменение указанного первого положения ОКА в случае выявления какого-либо условия неисправности двигателя. Первое положение ОКА может быть почти полностью открытым, если частота вращения двигателя выше первого значения частоты вращения (линия 1313 схемы 1300) и ниже второго значения частоты вращения (линия 1311 схемы 1300), при этом изменение первого положения включает в себя установку ОКА в почти полностью закрытое положение при выявлении первого условия неисправности двигателя (например, на t3 на схеме 1300). Первое условие неисправности двигателя может включать в себя рост разрежения во впускном коллекторе свыше первого порогового значения (например, график 1306 на t3 на схеме 1300). В другом примере первое положение ОКА может включать в себя частично открытое положение как на t6 на схеме 1300 (график 1302), при этом изменение положения ОКА включает в себя его установку в полностью открытое положение при выявлении второго условия неисправности двигателя (как на t7 на схеме 1300). Пример второго условия неисправности двигателя может включать в себя падение разрежения во впускном коллекторе ниже второго порогового значения, например, из-за заклинивания дросселя в почти полностью открытом положении.
На ФИГ. 14 представлена схема 1400, иллюстрирующая пример изменения положения регулирующего клапана аспиратора (РКА) в зависимости от частоты вращения двигателя и содержания кислорода в устройстве снижения токсичности отработавших газов. В раскрываемом примере РКА может быть установлен в системе двигателя (например, безнаддувного двигателя, двигателя с наддувом), содержащейся в транспортном средстве с гибридно-электрической силовой установкой (ТСГЭСУ). Схема гибридно-электрической силовой установки транспортного средства может быть последовательной, параллельной или последовательно-параллельной. На схеме 1400 представлены изменения содержания кислорода в каталитическом нейтрализаторе на кривой 1402, воздушно-топливное отношение ВТО (AFR) на кривой 1404, работа двигателя на кривой 1406, работа мотора/генератора на кривой 1408, изменения степени заряженности (СЗ) аккумулятора на кривой 1410, положение РКА на кривой 1412 и частота вращения двигателя на кривой 1414.
Значения времени нанесены на оси x, увеличиваясь слева направо по оси x. В данном примере ОКА показан в виде двухпозиционного клапана с возможностью установки либо в полностью открытое, либо в полностью закрытое положение. В других вариантах осуществления РКА может представлять собой бесступенчато-регулируемый клапан с возможностью принимать промежуточные положения между полностью открытым и полностью закрытым. Схема 1400 содержит линию 1401, представляющую пороговое содержание кислорода в каталитическом нейтрализаторе (например, Threshold_1 на ФИГ. 5), линию 1403, представляющую стехиометрическое ВТО, линию 1405, представляющую первый, верхний порог СЗ аккумуляторной батареи, и линию 1407, представляющую второй, нижний порог СЗ аккумуляторной батареи, линию 1411, представляющую второе, верхнее значение частоты вращения двигателя (Sp_2), линию 1413, представляющую первое, нижнее значение частоты вращения двигателя (Sp_1), линию 1415, обозначающую скорость холостого хода (например, 900 оборотов в минуту), линию 1417, представляющую третью частоту вращения двигателя (Sp_3) и линию 1419, обозначающую четвертую частоту вращения двигателя (Sp_4). Как раскрыто выше для ФИГ. 5, третья частота вращения двигателя может представлять собой частоту ниже скорости холостого хода для данного двигателя. Четвертая частота вращения двигателя может представлять собой частоту вращения двигателя номинально выше частоты вращения при глушении двигателя. Например, частота вращения двигателя при глушении может составлять 50 оборотов в минуту. В этом случае, пример четвертой частоты вращения двигателя может составлять 100 оборотов в минуту.
Между t0 и t1 система гибридного транспортного средства может работать в режиме с отключенным двигателем (график 1406), при этом гибридное транспортное средство приводят в движение, используя крутящий момент, создаваемый мотором (график 1408). Так как двигатель заглушен и неподвижен, содержание кислорода в каталитическом нейтрализаторе не изменяется (график 1402), РКА удерживают закрытым, и график ВТО не строят. Также, поскольку движение транспортного средства обеспечивает мотор, СЗ аккумуляторной батареи может постепенно снижаться между t0 и t1.
На t1 может быть дана команда включить двигатель. Например, двигатель можно включить, когда водитель запрашивает увеличение крутящего момента. Как показано на схеме, на t1 мотор может быть выключен (если отсутствует потребность в крутящем моменте, создаваемом мотором). В другом примере мотор может продолжить работу (например, на пониженных оборотах) для удовлетворения пониженной потребности в крутящем моменте мотора. Поскольку мотор отключен, СЗ аккумуляторной батареи не изменяется в промежутке времени между t1 и t3, после которого мотор может быть вновь запущен. Также, на t1, двигатель может работать на смеси с ВТО богаче стехиометрического (ВТО_1 на графике 1404) для улучшения сгорания и повышения эффективности каталитического нейтрализатора. При работе двигателя на смеси с ВТО богаче стехиометрического, содержание кислорода в каталитическом нейтрализаторе снижается. Кроме того, частота вращения двигателя может измениться от нулевой до скорости холостого хода и далее войти в диапазон между первым, нижним значением частоты (Sp_1), представленным линией 1413, и вторым, верхним значением частоты (Sp_2), представленным линией 1411. Как показано на схеме, частота вращения двигателя достигает значения между линией 1411 и линией 1413 на t2, после чего РКА переводят в открытое положение из закрытого, в котором он находился до этого. РКА можно удерживать открытым все время, пока частота вращения двигателя остается в необходимом диапазоне (например, между Sp_1 и Sp_2). Как разъяснялось выше касательно схемы 1100, повышение температура РКА может потребовать закрытия РКА независимо от частоты вращения двигателя (например, не в связи с изменением частоты вращения двигателя), хотя данный сценарий не показан в примере работы на схеме 1400.
На t3 может быть дана команда заглушить двигатель, и двигатель может быть отключен с одновременным запуском мотора. В связи с этим, СЗ аккумуляторной батареи может снизиться после t3. Так как двигатель сбавляет обороты, и частота вращения двигателя падает ниже первого, нижнего значения частоты (Sp_1) на t4, РКА можно закрыть. РКА можно удерживать закрытым, когда частота вращения двигателя опускается от первого, нижнего значение частоты ниже скорости холостого хода. Следует отметить, что содержание кислорода в каталитическом нейтрализаторе достаточно ниже порогового содержания кислорода (линия 1401), когда двигатель отключают на t3. Когда частота вращения двигателя достигнет третьего значения (Sp_3, обозначенного линией 1417) на t5 и снизится, РКА можно будет открыть на t5 для создания дополнительного разрежения. Таким образом, впускной дроссель можно закрыть при получении команды заглушить двигатель. Пропуская меньший поток воздуха через аспиратор, можно создавать разрежение, пока двигатель замедляет обороты до полной остановки, при этом номинально закачивая воздух в каталитический нейтрализатор. Так как содержание кислорода в каталитическом нейтрализаторе ниже порогового, каталитический нейтрализатор может накапливать дополнительный кислород из избыточного потока воздуха через аспиратор. Следовательно, на t5 РКА можно открыть. В случае падения частоты вращения двигателя ниже четвертого значения частоты вращения на t6, РКА можно закрыть. Следует отметить, что содержание кислорода в каталитическом нейтрализаторе увеличивается из-за подачи дополнительного воздуха в каталитический нейтрализатор, когда РКА открыт между t5 и t6. Следует понимать, что четвертое значение частоты вращения чуть выше, чем у двигателя в неподвижном состоянии.
Двигатель может находиться в неподвижном состоянии между t6 и t7, в то время как основным движителем транспортного средства выступает мотор. С момента t3 СЗ аккумуляторной батареи постепенно снижается, поскольку движение транспортного средства целиком обеспечивает мотор, и на t7 СЗ аккумуляторной батареи достигает второй, нижней пороговой СЗ (линия 1407), после чего можно включить двигатель для зарядки аккумуляторной батареи. На t7 дают команду включить двигатель, и частота вращения двигателя увеличивается от нулевой до частоты холостого хода и остается на этом уровне (например, 900 оборотов в минуту), пока заряжают аккумуляторную батарею. Так как частота вращения двигателя не достигает необходимого диапазона между первым, нижним значением частоты (линия 1413) и вторым, верхним значением частоты (линия 1411), между t7 и t9 РКА удерживают в закрытом положении. В этом случае, двигатель может не приводить транспортное средство в движение, но может обеспечивать зарядку аккумуляторной батареи. Соответственно, между t7 и t8 СЗ аккумуляторной батареи растет.
Следует отметить, что начальное ВТО (ВТО_2) при получении команды включить двигатель на t7 богаче начального ВТО (ВТО_1) при получении команды включить двигатель на t1. ВТО на t7 может быть богаче, чем на t1, так как в каталитическом нейтрализаторе может быть создан дополнительный запас кислорода на этапе глушения двигателя между t5 и t6. Как показано на схеме 1400, содержание кислорода на t1 ниже, чем на t7. Как можно заметить, содержание кислорода на t6 выше, чем на t5, вследствие подачи дополнительного воздуха на каталитический нейтрализатор из аспиратора. Например, запас кислорода на Ю (и, соответственно, ВТО на t1) может быть ниже, чем запас кислорода на t6 (и, соответственно, ВТО на t7), так как РКА нельзя открыть для создания разрежения после предшествующего глушения двигателя.
На t8 СЗ аккумуляторной батареи приближается к первому верхнему пороговому СЗ (линия 1405), но не достигает первого, верхнего порогового СЗ, оставляя резерв для зарядки аккумуляторной батареи во время случаев торможения в режиме электрической тяги (режиме с отключенным двигателем). При приближении СЗ аккумуляторной батареи к первой, верхней пороговой СЗ, на t8 на двигатель может быть направлена команда глушения. После этого двигатель может вращаться без подачи топлива до полной остановки. Когда частота вращения двигателя снижается от скорости холостого хода до третьего значения частоты вращения на t9, РКА можно включить для установки в открытое положение. Следует отметить, что на t9 содержание кислорода в каталитическом нейтрализаторе существенно ниже порогового. В связи с этим, на t9 РКА открывают для создания разрежения. Таким образом, РКА можно устанавливать в то или иное положение в зависимости от того, находится ли частота вращения двигателя между третьим значением частоты вращения и четвертым значением частоты вращения, а также от емкости по кислороду каталитического нейтрализатора. РКА оставляют открытым на краткий промежуток времени между t9 и t10 и, в результате подачи воздуха в каталитический нейтрализатор, содержание кислорода в каталитическом нейтрализаторе увеличивается между t9 и t10. На t10 частота вращения двигателя падает ниже четвертого значения частоты вращения и может достигнуть нуля к моменту t11. Когда на t10 частота вращения двигателя достигает четвертого значения частоты вращения, РКА также закрывают на t10.
Между t11 и t12 один период работы ТСГЭСУ, в том числе работа с включенным двигателем, может завершиться. В связи с этим, продолжительность работы ТСГЭСУ с включенным двигателем не показана на ФИГ. 14. На t12 двигатель может работать и приводить транспортное средство в движение, в то время как мотор отключен. Также, поскольку на t12 частота вращения двигателя находится между первым, нижним значением частоты (линия 1413) и вторым, верхним значением частоты (линия 1411), РКА открыт.Кроме того, ВТО может быть номинально беднее стехиометрического, в связи с чем между t12 и t13 содержание кислорода в каталитическом нейтрализаторе постепенно повышается.
На t13 может быть дана команда заглушить двигатель, и двигатель может быть выключен, в то время как мотор включают для приведения в движение транспортного средства. РКА можно удерживать открытым до t14, когда частота вращения двигателя упадет ниже первого, нижнего значения частоты (линия 1413). Содержание кислорода в каталитическом нейтрализаторе повышается до момента t14 благодаря поступлению воздуха через аспиратор, когда РКА открыт. На t14 РКА можно закрыть, так как частота вращения двигателя ниже первого, нижнего значения частоты. Когда частота вращения двигателя упадет ниже скорости холостого хода и станет ниже третьего значения частоты вращения (линия 1417) на t15, РКА можно удерживать закрытым, так как содержание кислорода в каталитическом нейтрализаторе по существу находится на пороговом уровне (линия 1401). Таким образом, РКА можно устанавливать в то или иное положение в зависимости от содержания кислорода в каталитическом нейтрализаторе. РКА нельзя открывать после выдачи команды на глушение двигателя, когда частота вращения двигателя находится между третьим значением частоты вращения и четвертым значением частоты вращения, если содержание кислорода в каталитическом нейтрализаторе по существу находится на пороговом уровне.
Впускной дроссель двигателя (не показан на ФИГ. 14) можно установить в полностью закрытое положение в случае выдачи команды на глушение двигателя на t13. Следует отметить, что РКА показан закрывающимся на t14 несмотря на то, что команда на глушение двигателя выдана на t13. Однако время между t13, когда поступает команда заглушить двигатель, и t14, когда частота вращения двигателя падает ниже первого, нижнего значения частоты вращения двигателя (линия 1413), может быть коротким. Таким образом, РКА можно установить в полностью закрытое положение (из открытого положения) по существу в то же самое время, в которое впускной дроссель переводят в полностью закрытое положение, поскольку промежуток времени между t13 и t14 может быть коротким.
Итак, пример способа для двигателя в гибридном транспортном средстве может содержать, в режиме с двигателем, включенным для приведения в движение транспортного средства, открытие отсечного клапана аспиратора (ОКА), когда частота вращения двигателя находится между первой частотой вращения двигателя (Sp_1) и второй частотой вращения двигателя (Sp_2), при этом первая частота вращения двигателя ниже второй частоты вращения двигателя, и открытие ОКА после первой команды на глушение двигателя, когда частота вращения двигателя находится между третей частотой вращения двигателя (Sp_3) и четвертой частотой вращения двигателя (Sp_4), при этом четвертая частота вращения двигателя номинально выше частоты остановленного двигателя. Способ может также содержать, в режиме с двигателем, включенным для приведения в движение транспортного средства, закрытие ОКА при превышении порогового значения температуры ОКА. Способ может также содержать, открытие ОКА после первой команды на глушение двигателя, если содержание кислорода в каталитическом нейтрализаторе отработавших газов ниже порогового. Способ может также содержать при повторном запуске двигателя после первой команды на глушение работу двигателя на смеси с воздушно-топливным отношением богаче стехиометрического. Способ может дополнительно содержать закрытие РКА после второй команды на глушение двигателя независимо от частоты вращения двигателя. В этом случае, РКА открывать нельзя, потому что содержание кислорода в каталитическом нейтрализаторе отработавших газов находится на пороговом уровне или приближено к нему. ОКА можно закрыть синхронно с закрытием впускного дросселя двигателя в гибридном транспортном средстве.
Таким образом, положение регулирующего клапана аспиратора (РКА) можно изменять в зависимости от частоты вращения двигателя. Устанавливая РКА в то или иное положение в зависимости от частоты вращения двигателя, работу аспиратора и РКА можно достоверно проверять в процессе контроля состава отработавших газов. Использование частоты вращения двигателя в качестве параметра для принятия решения об установке РКА в то или иное положение позволяет упростить алгоритм управления РКА. Кроме того, положение РКА, выбранное в зависимости от частоты вращения двигателя, можно изменить в зависимости от температуры РКА и в случае работы двигателя с параметрами, измененными в связи с диагностированием неисправности двигателя. Закрывая РКА при превышении пороговой температуры РКА, можно ослабить ухудшение характеристик РКА, одновременно улучшив показатели его работы. Устанавливая РКА в то или иное положение в зависимости от того, какие параметры работы двигателя изменены в связи с выявлением условий неисправности двигателя, можно устранить такие проблемы как ошибки в регулировании расхода воздуха и низкое разрежение. Положение РКА в гибридном транспортном средстве также можно регулировать в зависимости от частоты вращения двигателя после глушения двигателя и содержания кислорода в каталитическом нейтрализаторе. Следовательно, можно повысить эффективность работы каталитического нейтрализатора, одновременно обеспечив соблюдение нормативов выбросов и создание достаточного разрежения.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут выполняться системой управления, содержащей контроллер, различные датчики, исполнительные механизмы и прочие аппаратные средства в составе системы двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, в которой раскрытые действия осуществляются путем исполнения команд, содержащихся в системе, различными аппаратными средствами системы двигателя во взаимодействии с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
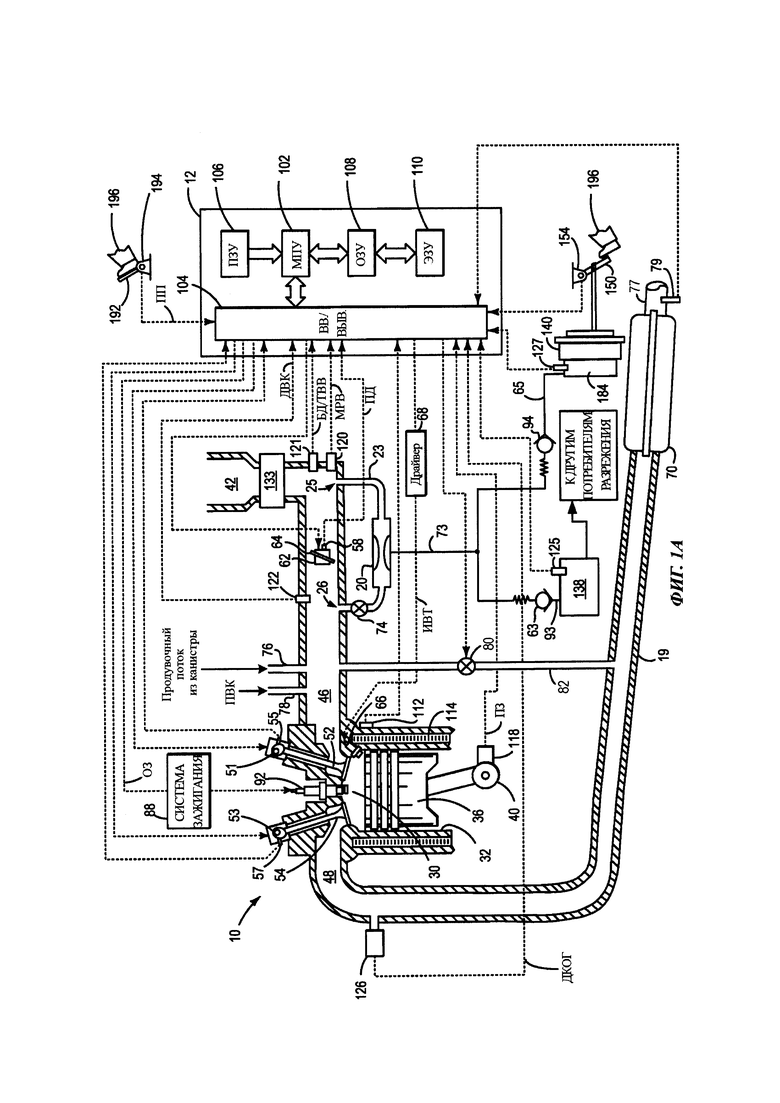

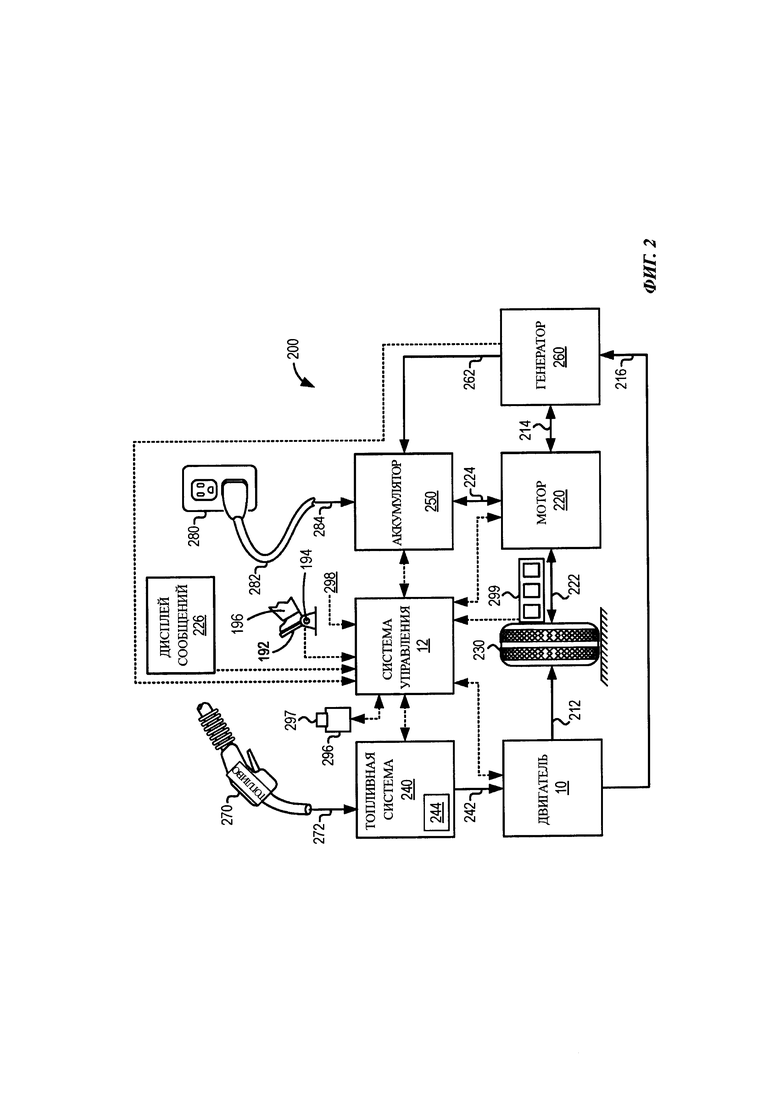
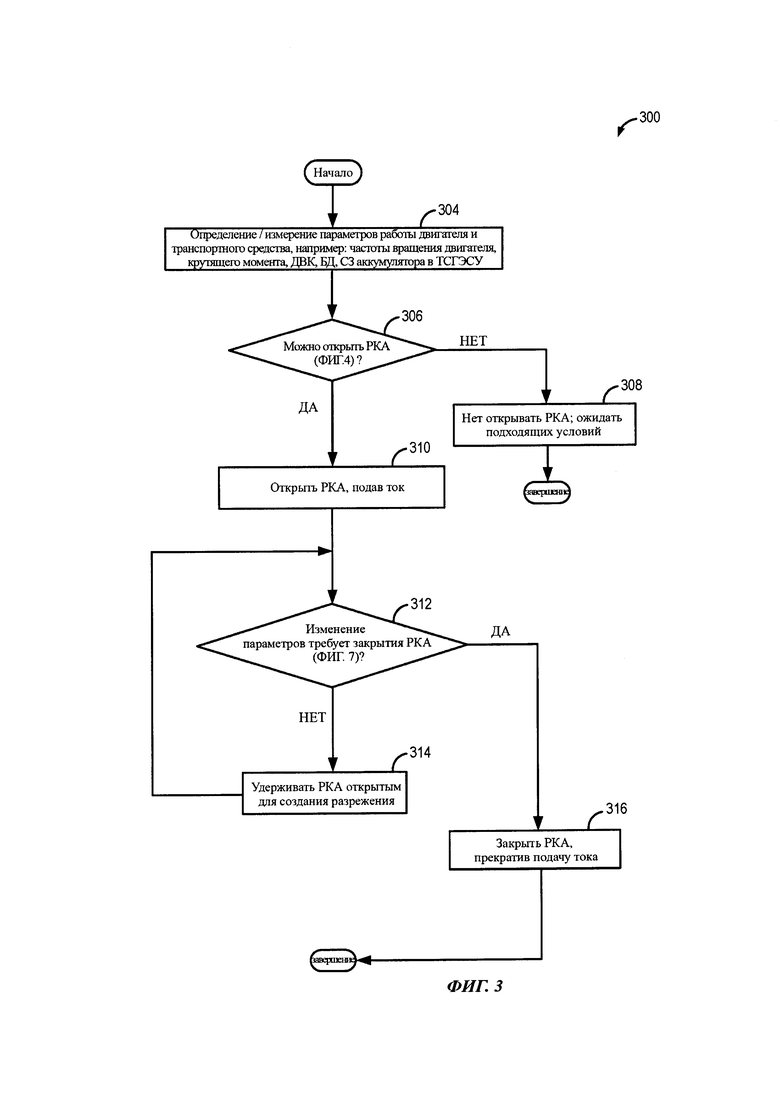
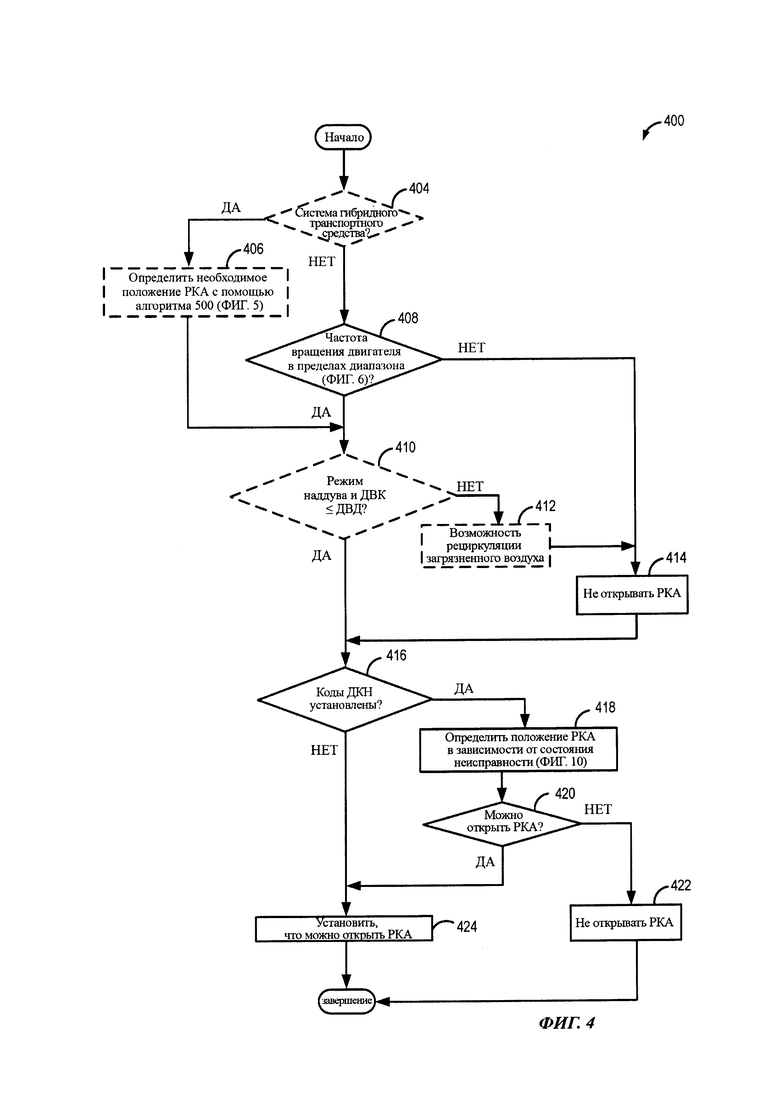
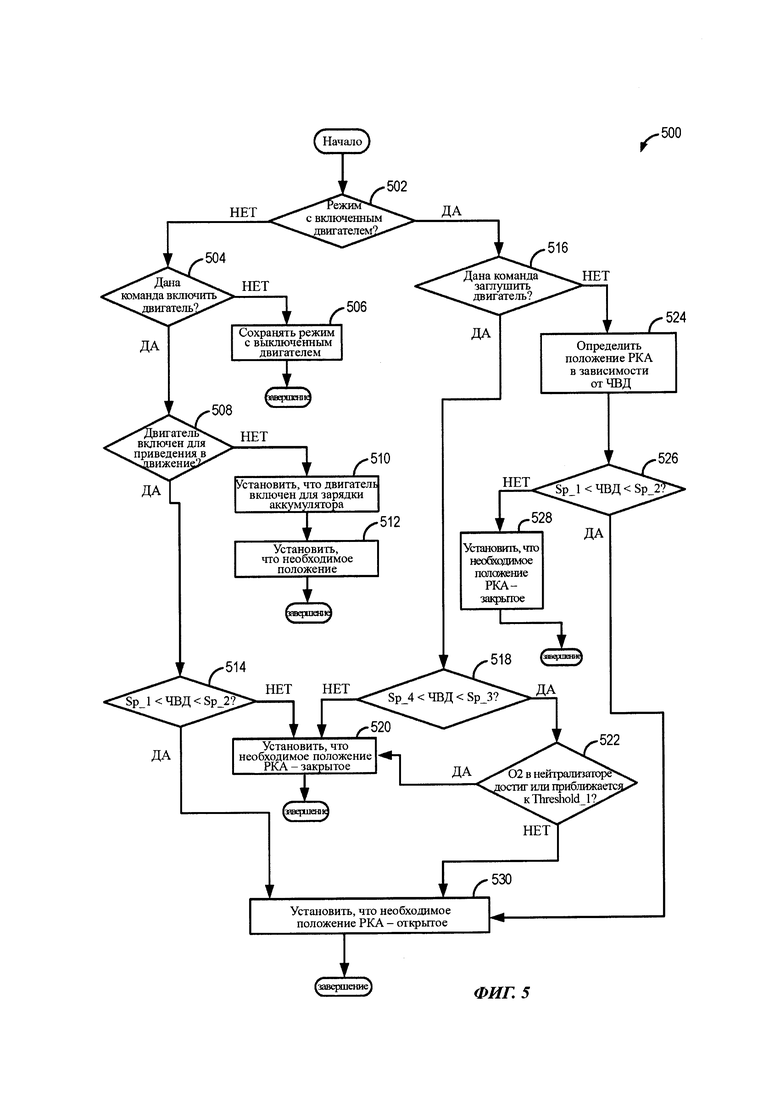
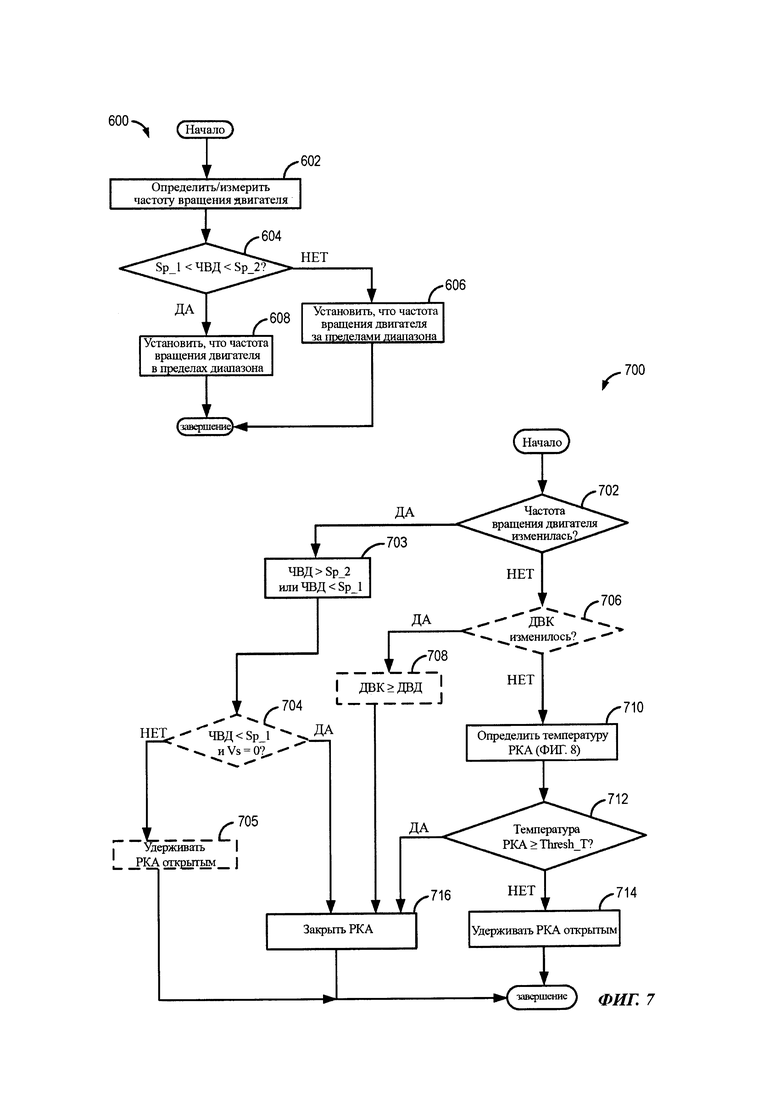

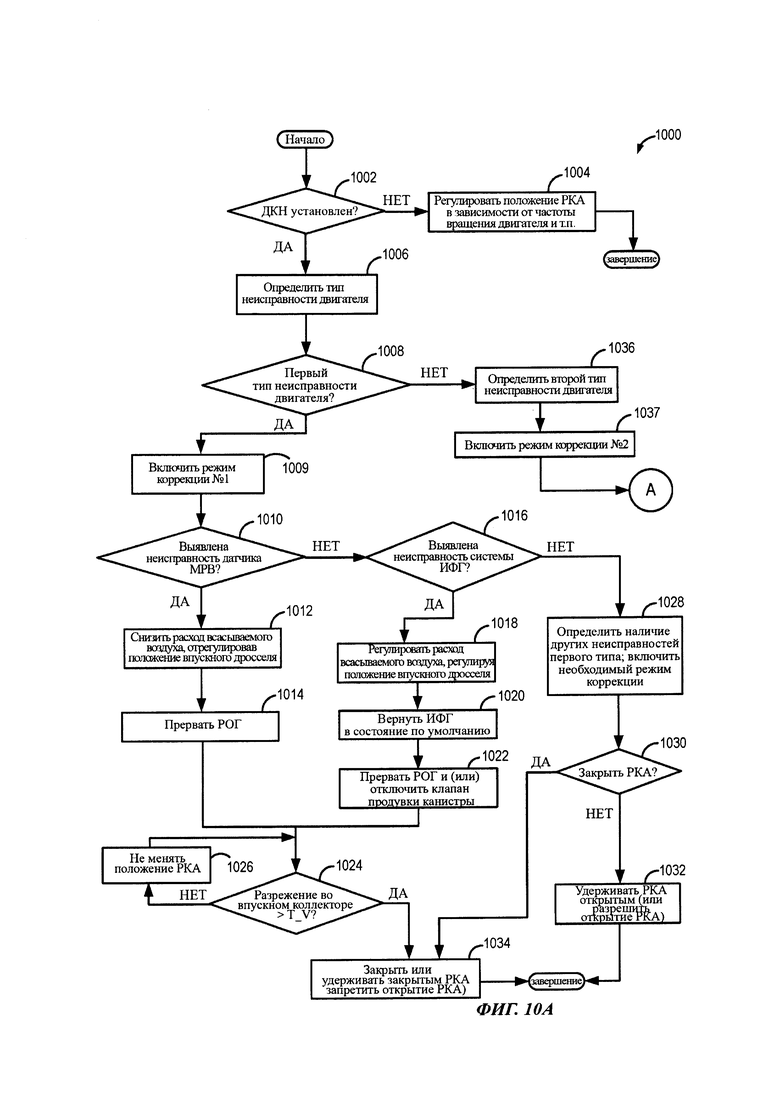

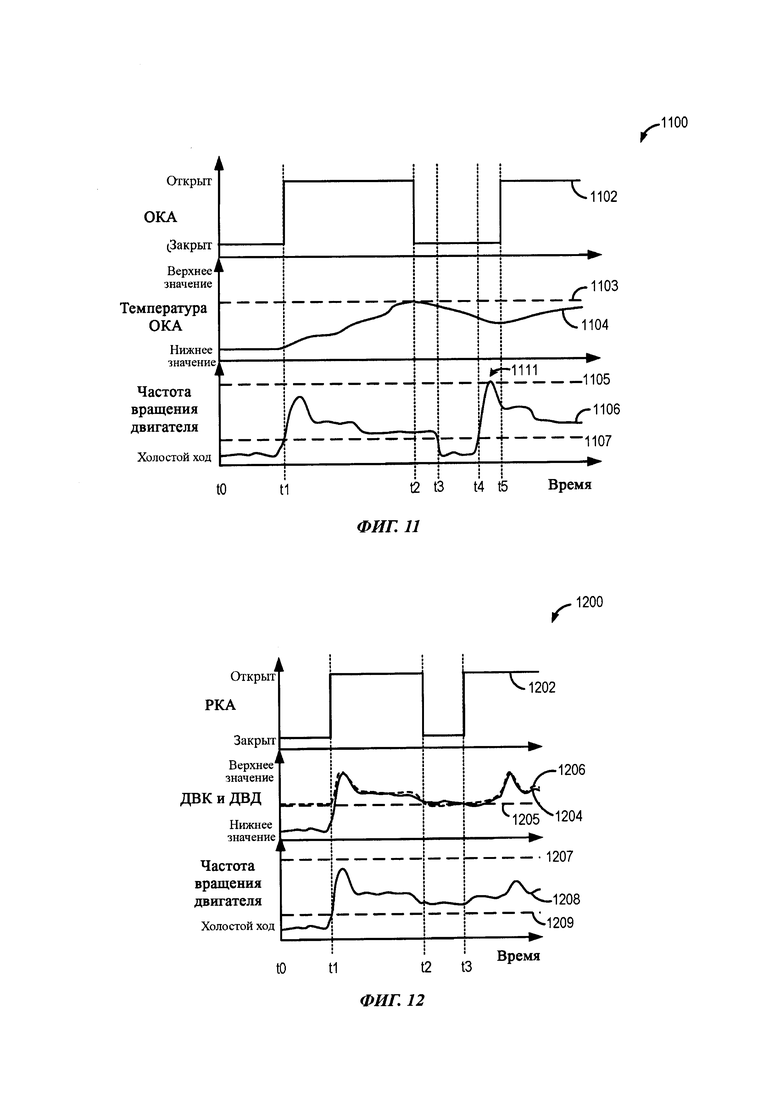
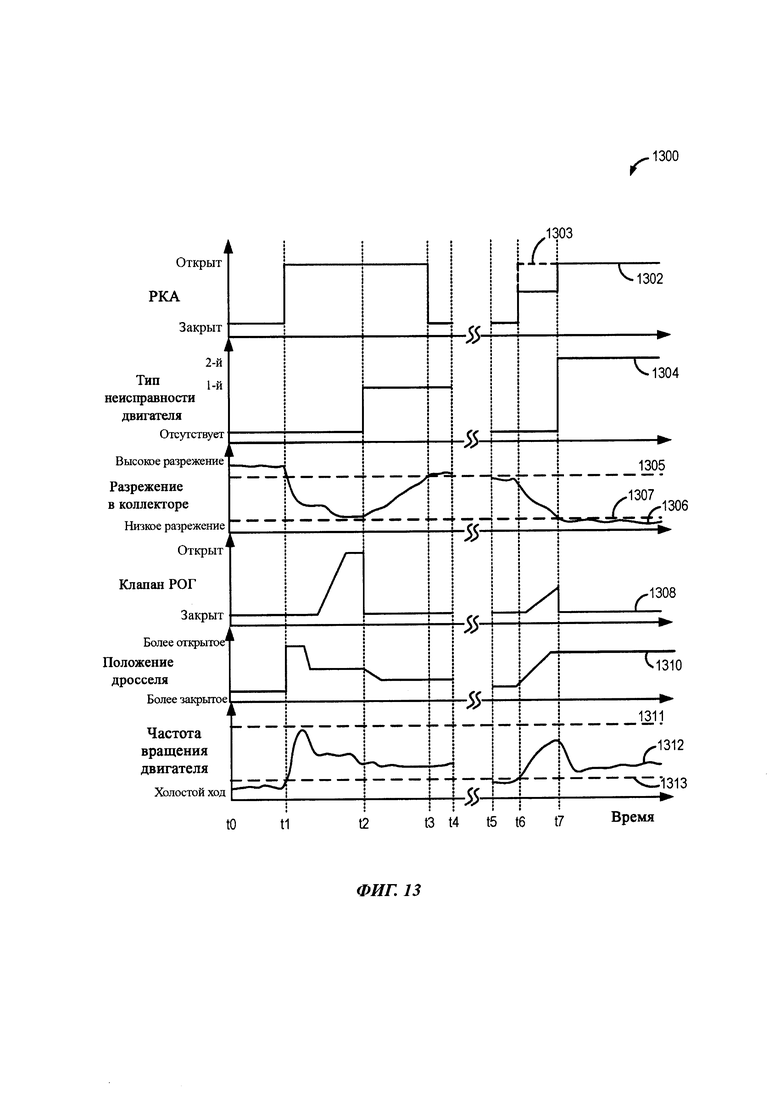
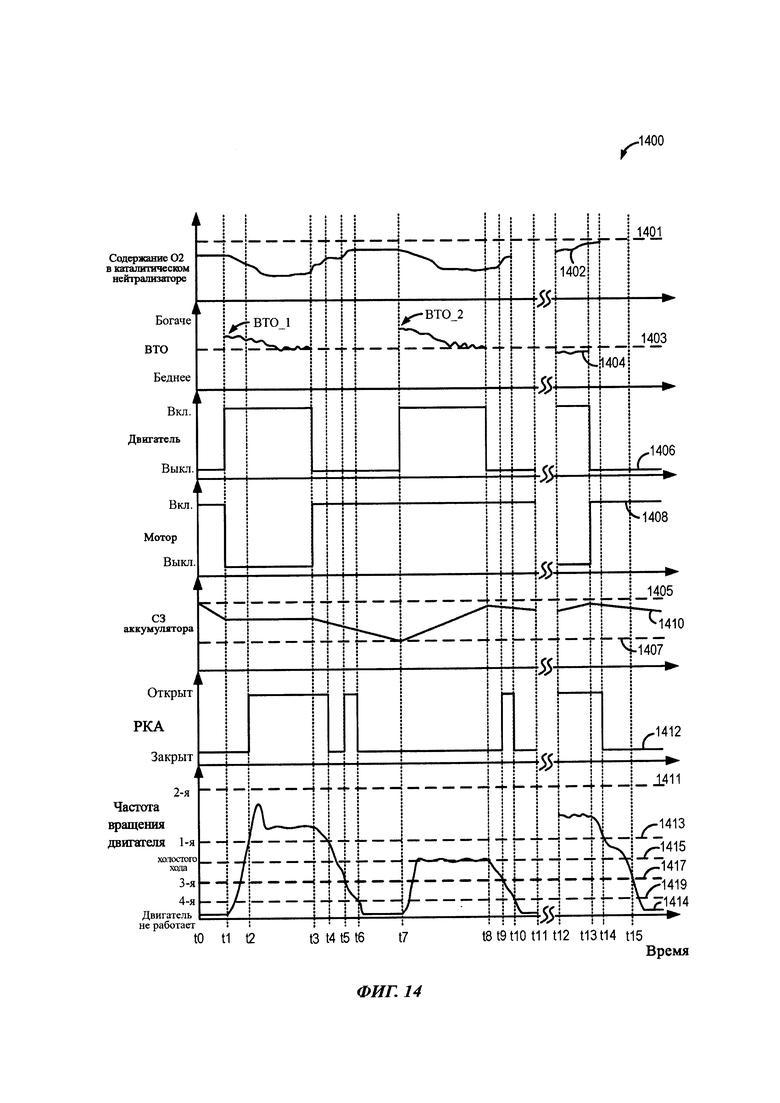
Изобретение относится к системе и способам управления регулирующим клапаном аспиратора в двигателе. Пример способа содержит закрытие регулирующего клапана аспиратора в случае диагностирования первого условия неисправности двигателя и открытие регулирующего клапана аспиратора в случае диагностирования второго условия неисправности двигателя, при этом второе условие неисправности двигателя отличается от первого условия неисправности двигателя, причем второе условие неисправности двигателя включает в себя неисправность одного или нескольких датчиков, чьи показания используют в алгоритме управления РКА. 4 н. и 14 з.п. ф-лы, 15 ил.
1. Способ для двигателя, содержащий:
закрытие регулирующего клапана аспиратора (РКА) в ответ на диагностирование первого условия неисправности двигателя; и
открытие РКА в ответ на диагностирование второго условия неисправности двигателя, при этом второе условие неисправности двигателя отличается от первого условия неисправности двигателя, причем второе условие неисправности двигателя включает в себя неисправность одного или нескольких датчиков, чьи показания используют в алгоритме управления РКА.
2. Способ по п. 1, в котором первое условие неисправности двигателя включает в себя увеличение разрежения во впускном коллекторе свыше первого порогового значения.
3. Способ по п. 2, в котором первое условие неисправности двигателя включает в себя неисправность датчика массового расхода воздуха (МРВ).
4. Способ по п. 3, дополнительно содержащий прерывание потока рециркуляции отработавших газов (РОГ) в ответ на неисправность датчика МРВ.
5. Способ по п. 2, в котором первое условие неисправности двигателя включает в себя неисправность системы изменения фаз газораспределения.
6. Способ по п. 1, в котором второе условие неисправности двигателя включает в себя уменьшение разрежения во впускном коллекторе ниже второго порогового значения.
7. Способ по п. 6, в котором второе условие неисправности двигателя включает в себя заклинивание впускного дросселя в наиболее открытом положении.
8. Способ по п. 7, дополнительно содержащий регулировку одного или нескольких из следующих параметров: впрыска топлива и угла опережения зажигания - в случае заклинивания впускного дросселя в наиболее открытом состоянии.
9. Способ по п. 6, в котором второе условие неисправности двигателя включает в себя неисправность датчика положения впускного дросселя.
10. Способ по п. 1, в котором РКА устанавливают в обводном канале параллельно впускному дросселю, при этом обводной канал содержит аспиратор.
11. Способ по п. 1, в котором РКА представляет собой бесступенчато-регулируемый клапан.
12. Система для двигателя, содержащая: впускной коллектор двигателя;
впускной дроссель, установленный во впускном канале;
аспиратор, установленный во впускном канале перепускаемого воздуха параллельно впускному дросселю;
регулирующий клапан аспиратора, расположенный ниже по потоку от аспиратора во впускном канале перепускаемого воздуха и регулирующий эжектирующий поток как через аспиратор, так и через впускной канал перепускаемого воздуха;
эжектирующий вход аспиратора, соединенный с впускным каналом выше по потоку от впускного дросселя;
эжектирующий выход аспиратора, соединенный с впускным каналом ниже по потоку от впускного дросселя; и
контроллер с командами в постоянном запоминающем устройстве, выполняемыми процессором для:
закрытия регулирующего клапана аспиратора в ответ на выявление первого условия неисправности двигателя; и
прерывания создания разрежения аспиратором, причем первое условие неисправности двигателя включает в себя рост разрежения во впускном коллекторе свыше первого порогового значения и неисправность системы изменения фаз газораспределения.
13. Система по п. 12, в которой первое условие неисправности двигателя включает в себя неисправность датчика массового расхода воздуха (МРВ).
14. Способ для двигателя, содержащий:
открытие отсечного клапана аспиратора в ответ на диагностирование какого-либо условия неисправности двигателя, причем условие неисправности двигателя включает в себя падение разрежения во впускном коллекторе до значения ниже порогового.
15. Способ по п. 14, дополнительно содержащий изменение параметра работы двигателя в ответ на диагностирование условия неисправности двигателя.
16. Способ по п. 15, в котором условие неисправности двигателя включает в себя заклинивание впускного дросселя в наиболее открытом положении.
17. Способ по п. 15, в котором условие неисправности двигателя включает в себя неисправность датчика положения впускного дросселя.
18. Способ для двигателя, содержащий:
закрытие регулирующего клапана аспиратора (РКА) в ответ на диагностирование первого условия неисправности двигателя;
открытие РКА в ответ на диагностирование второго условия неисправности двигателя, при этом второе условие неисправности двигателя отличается от первого условия неисправности двигателя; причем первое условие неисправности двигателя включает в себя увеличение разрежения во впускном коллекторе свыше первого порогового значения и неисправность датчика массового расхода воздуха (МРВ); и прерывание потока рециркуляции отработавших газов (РОГ) в ответ на неисправность датчика МРВ.
| US 7627407 B2, 01.12.2009 | |||
| СПОСОБ УСОВЕРШЕНСТВОВАННОГО ДИАГНОСТИРОВАНИЯ ВОЗМОЖНОЙ НЕИСПРАВНОСТИ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2006 |
|
RU2424573C2 |
| Устройство для радиовещания по телефонным проводам | 1928 |
|
SU19276A1 |
| US 6370935 B1, 16.04.2002 | |||
| US 7634348 B2, 15.12.2009. | |||

