Область техники, к которой относится изобретения
Настоящее изобретение относится к области систем для усовершенствования торможения транспортного средства. Способ, в частности, может быть использован в транспортных средствах, содержащих автоматическую трансмиссию, содержащую гидротрансформатор.
Уровень техники
Замедление транспортного средства может происходить время от времени, при отпускании водителем педали акселератора. Замедление транспортного средства может происходить с постоянной интенсивностью (или по меньшей мере последовательно) вплоть до поступления от водителя запроса на увеличение крутящего момента для ускорения или до достижения скоростью транспортного средства нуля или скорости, отличной от нуля на величину, меньшую пороговой. Однако при высокой постоянной интенсивности замедления возможно снижение топливной экономичности транспортного средства, так как транспортное средство теряет кинетическую энергию в связи с потерями на торможение приводной системой. Напротив, при низкой постоянной интенсивности замедления у водителя может возникать впечатление движения транспортного средства с сохранением прежней скорости. Таким образом, может быть желательным обеспечение интенсивности замедления транспортного средства, обеспечивающей достаточную топливную экономичность и в то же время устраняющей впечатление отсутствия замедления транспортного средства.
Раскрытие изобретения
Авторы настоящего изобретения выявили вышеупомянутые недостатки и разработали способ эксплуатации транспортного средства, включающий в себя: замедление транспортного средства путем переключения приводной системы в режим свободного хода в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, и условия движения, не указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути.
Переключение приводной системы в режим свободного хода при требуемом крутящем моменте, меньшем порогового, скорости транспортного средства, большей пороговой, и условиях движения, не указывающих на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути, обеспечивает возможность увеличения дальности движения транспортного средства по инерции для повышения топливной экономичности. Кроме того, торможение приводной системой может быть усилено путем увеличения создаваемой компрессором кондиционера нагрузки на двигатель, продолжающий вращение, но не производящий сжигания воздушно-топливной смеси, в случае предполагаемого применения водителем тормозов, в результате чего кинетическая энергия транспортного средства может быть преобразована в полезную работу или в запасенную энергию. Например, при возникновении потребности в небольших замедлениях трансмиссия может быть переключена на нейтральную передачу для увеличения дальности или дистанции движения транспортного средства по инерции. Трансмиссия может быть переключена на передачу при замкнутой муфте гидротрансформатора, отсутствии подачи топлива в двигатель и продолжении его вращения для обеспечения более высокого уровня торможения приводной системой в случае потребности в умеренных или более высоких уровнях замедления. Включение компрессора кондиционера и увеличение нагрузки генератора при переключении трансмиссии на передачу, замкнутой муфте гидротрансформатора и вращении двигателя без подачи топлива может обеспечить еще большее усиление торможения приводной системой в случае потребности в высоких уровнях замедления. Таким образом, может быть обеспечена возможность регулирования торможения приводной системой, дающая более значительные преимущества, чем простое применение фиксированного торможения приводной системой в условиях низкого требуемого крутящего момента.
Раскрытое в настоящем описании решение может обладать несколькими преимуществами. Например, оно обеспечивает возможность увеличения дальности движения транспортного средства по инерции в условиях, требующих чрезвычайно малого торможения приводной системой. Кроме того, данное решение может обеспечить получение требуемой величины торможения приводной системой для замедления транспортного средства в условиях, в которых может быть желательным регулируемое торможение приводной системой.
Вышеуказанные и другие преимущества и особенности настоящего изобретения станут ясны из чтения приведенного ниже раздела «Осуществление изобретения», взятого как отдельно, так и в сочетании с прилагаемыми чертежами.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
Описанные преимущества станут более ясны из чтения описания примера осуществления изобретения, приведенного в разделе «Осуществление изобретения», взятого как отдельно, так и в сочетании с прилагаемыми чертежами, на которых показано следующее.
На фиг. 1 представлена схема двигателя;
Фиг. 2 иллюстрирует пример осуществления приводной системы транспортного средства;
На фиг. 3 представлен пример последовательности работы транспортного средства; и
На фиг. 4 представлена блок-схема примера осуществления способа управления транспортным средством в условиях низкого требуемого крутящего момента.
Осуществление изобретения
Настоящее раскрытие касается управления работой транспортного средства. В соответствии с одним из примеров осуществления, не налагающим каких-либо ограничений, транспортное средство может содержать двигатель, представленный на фиг. 1. Кроме того, двигатель может входить в состав транспортного средства, содержащего приводную систему, представленную на фиг. 2. Транспортное средство может работать в соответствии с последовательностью, представленной на фиг. 3, на основе способа, представленного на фиг. 4.
Настоящее раскрытие описывает операции по управлению транспортным средством в зависимости от интенсивности замедления, уклона дороги и других факторов. Например, если ездовой цикл, в котором производят измерения топливной экономичности, включает в себя лишь замедление от умеренного до сильного, переключение трансмиссии на нейтральную передачу может быть менее выгодным с точки зрения топливной экономичности, чем отсечка топлива в режиме замедления (например, продолжение вращения двигателя без подачи топлива в цилиндры двигателя). При малых интенсивностях замедления переключение трансмиссии на нейтральную передачу (с продолжением подачи топлива в двигатель или ее отключением) может быть более выгодным с точки зрения топливной экономичности и управляемости транспортного средства, чем торможение приводной системой. Транспортное средство может быть выполнено с возможностью обеспечения более высокого уровня замедления (то есть большего замедления), чем в режиме свободного хода, при отпускании ногой водителя педали акселератора транспортного средства. Соответственно, отпускание педали акселератора может приводить к непреднамеренному торможению приводной системой, вызывающему, при отсутствии высокоэффективной рекуперации энергии торможения, снижение топливной экономичности. Авторы настоящего изобретения установили, что выбор режима замедления, соответствующего текущей ситуации, может быть основан на прогнозировании условий движения. Прогнозирование условий движения транспортного средства включает в себя оценку скорости сближения, сигналов регулирования движения и уклона дороги.
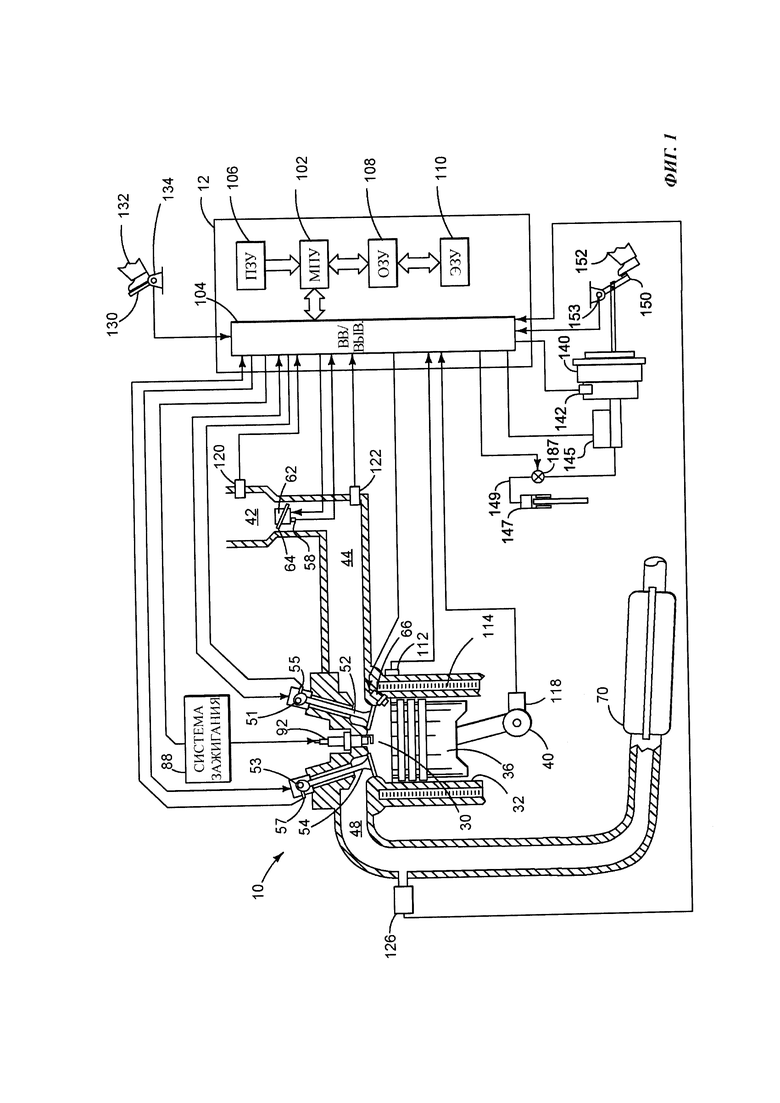
На фиг. 1 представлен двигатель 10 внутреннего сгорания, содержащий несколько цилиндров, один из которых представлен на фиг. 1, и управляемый электронным контроллером 12 двигателя. Двигатель 10 содержит камеру 30 сгорания и стенки 32 цилиндра, между которыми расположен поршень 36, соединенный с коленчатым валом 40. Камера 30 сгорания представлена находящейся в сообщении со впускным коллектором 44 и выхлопным коллектором 48 через, соответственно, впускной клапан 52 и выхлопной клапан 54. Управление положением впускного и выхлопного клапанов может быть обеспечено впускным кулачком 51 и выхлопным кулачком 53. Положение впускного кулачка 51 может быть определено датчиком 55 впускного кулачка. Положение выхлопного кулачка 53 может быть определено датчиком 57 выхлопного кулачка.
Топливный инжектор 66 представлен установленным с возможностью впрыска топлива непосредственно в цилиндр 30 в соответствии с конфигурацией, известной специалистам в данной области под названием системы прямого впрыска. В альтернативном варианте осуществления может быть предусмотрен впрыск топлива во впускной порт в соответствии так называемой конфигурацией распределенного впрыска. Топливный инжектор 66 производит впрыск топлива, количество которого пропорционально ширине импульса сигнала, поступающего от контроллера 12. Топливо поступает в топливный инжектор 66 из топливной системы (не представлена), содержащей топливный бак, топливный насос и топливную рампу (не представлены). Топливный инжектор 66 работает под управлением сигналов, поступающих от контроллера 12. Кроме того, впускной коллектор 44 представлен в сообщении с необязательной электронной дроссельной заслонкой 62, изменяющей положение дроссельной пластины 64 для регулирования расхода воздуха из воздухозаборника 42 во впускной коллектор 44.
Бесконтактная система 88 зажигания обеспечивает образование искры зажигания в камере 30 сгорания под управлением контроллера 12 при помощи свечи 92 зажигания. Универсальный датчик 126 содержания кислорода в отработавших газах (УДКОГ) представлен подсоединенным к выхлопному коллектору 48 выше по потоку от каталитического нейтрализатора 70. В альтернативном варианте осуществления вместо УДКОГ 126 может быть использован двухпозиционный датчик содержания кислорода в отработавших газах.
В соответствии с одним из примеров осуществления, нейтрализатор 70 может содержать несколько каталитических блоков. В соответствии с другим примером осуществления, может быть предусмотрено несколько средств снижения токсичности выбросов, каждые из которых содержат по несколько каталитических блоков. Каталитический нейтрализатор 70 может представлять собой, например, трехкомпонентный каталитический нейтрализатор.
Тормозная жидкость может поступать под давлением из главного тормозного цилиндра 145 в тормоза 147 транспортного средства по тормозной магистрали 149. Усилитель 140 торможения облегчает приведение в действие тормозов 147 ногой 152 оператора, нажимающей на педаль 150 тормоза. Уровень разрежения в усилителе 140 торможения может быть измерен датчиком 142 разрежения. Впускной коллектор 44 может создавать разрежение в вакуумном усилителе 140 торможения. Датчик 153 положения педали тормоза передает информацию о положении педали тормоза контроллеру 12. Клапан 187, управляемый контроллером 12, избирательно обеспечивает подачу тормозной жидкости из главного тормозного цилиндра 145 для приведения в действие тормозов 147 транспортного средства.
Контроллер 12 показан на фиг. 1 в виде микрокомпьютера обычного типа, содержащего: микропроцессорное устройство 102, порты 104 ввода/вывода, долговременное запоминающее устройство (например, постоянную память) 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от соединенных с двигателем 10 датчиков, среди которых: показание температуры хладагента двигателя от датчика 112 температуры, соединенного с рубашкой 114 охлаждения; сигнал датчика 134 положения педали, соединенного с педалью 130 акселератора, для измерения перемещения или углового положения, определяемого нажимом ноги 132 оператора; сигнал давления воздуха в коллекторе от датчика 122, соединенного со впускным коллектором 44; сигнал положения двигателя от датчика 118 на эффекте Холла, измеряющего положение коленчатого вала 40; показание массового расхода воздуха, поступающего в двигатель, от датчика 120; и показание положения дроссельной заслонки от датчика 58. Также может быть предусмотрено измерение атмосферного давления (датчик не представлен) для использования контроллером 12. В соответствии с одним из предпочтительных аспектов настоящего изобретения, датчик 118 положения двигателя вырабатывает на каждый оборот коленчатого вала заранее заданное число равномерно распределенных импульсов, по которому может быть определена частота вращения двигателя (ЧВД).
В рабочем режиме каждый из цилиндров двигателя 10, как правило, проходит четырехтактный цикл, включающий: такт впуска, такт сжатия, такт расширения и такт выхлопа. На такте впуска обычно происходит закрытие выхлопного клапана 54 и открытие впускного клапана 52. Через впускной коллектор 44 в камеру 30 сгорания поступает воздух, причем происходит перемещение поршня 36 к дну цилиндра для увеличения внутреннего объема камеры 30 сгорания. Специалисты в данной области обычно называют положение, в котором поршень 36 расположен вблизи дна цилиндра в конце своего хода (например, соответствующее наибольшему объему камеры 30 сгорания) нижней мертвой точкой (НМТ). На такте сжатия впускной клапан 52 и выхлопной клапан 54 закрыты. Происходит перемещение поршня 36 в направлении головки цилиндра для сжатия воздуха, находящегося внутри камеры 30 сгорания. Специалисты в данной области обычно называют положение, в котором поршень 36 расположен в конце своего хода вблизи головки цилиндра (например, соответствующее наименьшему объему камеры 30 сгорания) верхней мертвой точкой (ВМТ). В рамках операции, называемой в настоящем описании впрыском, производят ввод топлива в камеру сгорания. В рамках операции, называемой в настоящем описании зажиганием, производят зажигание введенного топлива при помощи известных средств зажигания, например, искровой свечи 92 зажигания, что приводит к сгоранию топлива.
На такте расширения расширяющиеся газы снова перемещают поршень 36 в НМТ. Коленчатый вал 40 преобразует поступательное движение поршня во вращательное движение вращающегося вала. Наконец, на такте выхлопа происходит открытие выхлопного клапана 54 для выпуска сгоревшей воздушно-топливной смеси в выхлопной коллектор 48 и возвращение поршня в ВМТ. Следует отметить, что вышеприведенное описание представлено исключительно в качестве примера, и время открытия и/или закрытия впускного и выхлопного клапанов может быть иным, например, с использованием положительного или отрицательного перекрытия клапанов, запаздывания закрытия впускного клапана или других изменений.
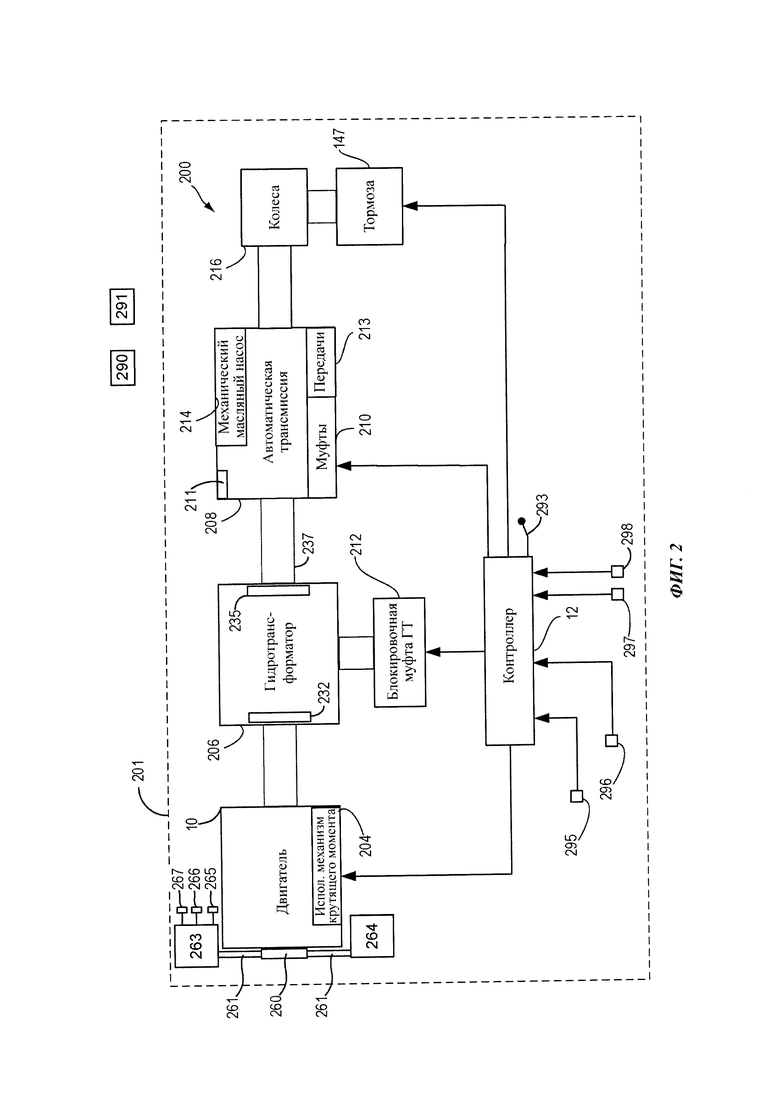
На фиг. 2 представлены транспортное средство 201 и функциональная схема приводной системы 200 транспортного средства. Для запуска двигателя 10 может быть предусмотрена пусковая система двигателя (не представлена). Кроме того, двигатель 10 может вырабатывать или регулировать крутящий момент при помощи исполнительных механизмов 204 крутящего момента, например, топливного инжектора, дроссельной заслонки, распределительного вала и т.д. Двигатель 10 представляет собой единственный элемент приводной системы, вырабатывающий крутящий момент и подающий положительный крутящий момент в приводную систему 200.
Двигатель 10 может обеспечивать приведение в движение генератора 263 через ремень 261. Механическое подсоединение генератора 263 и/или компрессора 264 кондиционера к двигателю 10 может быть обеспечено избирательным замыканием муфты 260. В альтернативном варианте муфта 260 может быть разомкнута для отсоединения генератора 263 и компрессора 264 кондиционера от двигателя 10. В соответствии с одним из примеров осуществления, компрессор 264 кондиционера представляет собой компрессор с регулируемым рабочим объемом, увеличивающий выходную мощность путем увеличения рабочего объема компрессора и наоборот. Генератор 263 может обеспечивать электропитание электрических нагрузок транспортного средства, в число которых в частности, но не исключительно, входят аккумуляторная батарея 267, система 266 подогрева ветрового стекла и осветительные приборы 265 транспортного средства. Кроме того, двигатель 10 может приводить в движение через ремень 261 механическую нагрузку 364. Механическая нагрузка 364 может представлять собой компрессор кондиционера с регулируемым рабочим объемом, воздушный/вакуумный насос или насос усилителя рулевого управления. В соответствии с некоторыми из примеров осуществления, транспортное средство 201 может содержать компрессор кондиционера, вакуумный насос и насос усилителя рулевого управления.
Выходной крутящий момент двигателя может быть передан на гидротрансформатор 206 для приведения в движение автоматической трансмиссии 208. Гидротрансформатор 206 содержит рабочее колесо 232 и турбину 235. Кроме того, одна или несколько из муфт 210, в том числе муфта переднего хода, может быть замкнута для включения передач (например, с 1 по 10) и перемещения транспортного средства 201. В соответствии с одним из примеров осуществления, гидротрансформатор может представлять собой компонент трансмиссии. Кроме того, муфты 213 передач могут быть замкнуты по мере необходимости для включения нескольких фиксированных передаточных чисел трансмиссии. Регулирование выходного крутящего момента гидротрансформатора может быть обеспечено блокировочной муфтой 212 гидротрансформатора. Например, при полностью разомкнутой блокировочной муфте 212 гидротрансформатора гидротрансформатор 206 передает крутящий момент двигателя на автоматическую трансмиссию 208 посредством жидкостной передачи между турбиной гидротрансформатора и рабочим колесом гидротрансформатора, тем самым обеспечивая возможность мультипликации крутящего момента. Напротив, при полностью замкнутой блокировочной муфте 212 гидротрансформатора происходит прямая передача крутящего момента двигателя через муфту гидротрансформатора на входной вал (не представлен) трансмиссии 208. В альтернативном варианте блокировочная муфта 212 гидротрансформатора может быть частично замкнута, что позволяет регулировать величину крутящего момента, передаваемого на трансмиссию. Контроллер может быть выполнен с возможностью регулирования величины крутящего момента, передаваемого гидротрансформатором 212, путем изменения состояния блокировочной муфты гидротрансформатора в соответствии с различными условиями работы двигателя или в зависимости от требований водителя к работе двигателя. Для повышения давления текучей среды в автоматической трансмиссии 208 может быть использован механический насос 214. В соответствии с некоторыми из примеров осуществления, автоматическая трансмиссия 208 содержит одностороннюю муфту 211, обеспечивающую возможность передачи крутящего момента от двигателя 10 на автоматическую трансмиссию 208 и колеса 216, но не допускающую передачи крутящего момента с колес 216 на двигатель 10.
Выходной крутящий момент автоматической трансмиссии 208 может в свою очередь быть передан на колеса 216 для перемещения транспортного средства. В частности, до передачи выходного крутящего момента на колеса автоматическая трансмиссия 208 может передавать входной крутящий момент на входной вал 237 в зависимости от условий движения транспортного средства.
Кроме того, при применении колесных тормозов 147 к колесам 216 может быть приложена сила трения. В соответствии с одним из примеров осуществления, колесные тормоза 147 могут быть применены в ответ на нажатие ногой водителя на педаль 150 тормоза, представленную на фиг. 1. Аналогичным образом сила трения, прилагаемая к колесам 216, может быть уменьшена путем выключения колесных тормозов 147 в ответ на отпускание ногой водителя педали тормоза.
Механический масляный насос 215 может быть установлен в сообщении по текучей среде с автоматической трансмиссией 208 для создания гидравлического давления, необходимого для замыкания различных муфт, например, муфт 210 и/или блокировочной муфты 212 гидротрансформатора. Механический масляный насос 214 может работать синхронно с гидротрансформатором 212, причем его приведение в действие может быть обеспечено, например, вращением двигателя или входного вала трансмиссии. Таким образом, гидравлическое давление, создаваемое в механическом масляном насосе 214, может возрастать при увеличении частоты вращения двигателя и спадать при уменьшении частоты вращения двигателя. Для создания дополнительного гидравлического давления относительно гидравлического давления, обеспечиваемого механическим масляным насосом 214, может быть предусмотрен электрический масляный насос 220, также установленный в сообщении по текучей среде с автоматической трансмиссией, но работающий независимо от приводной силы двигателя 10 или трансмиссии 208.
Контроллер 12 может быть выполнен с возможностью приема сигналов от двигателя 10, как более подробно показано на фиг. 1, и соответствующего регулирования выходного крутящего момента двигателя и/или работы гидротрансформатора, трансмиссии, муфт и/или тормозов. В соответствии с одним из примеров осуществления, регулирование выходного крутящего момента может быть обеспечено путем регулирования сочетания момента зажигания, ширины импульса впрыска топлива, момента впрыска топлива и/или заряда воздуха при помощи изменения открытия дроссельной заслонки и/или фаз газораспределения, высоты подъема клапанов и уровня наддува в случае двигателей с системами турбонаддува или нагнетателями. Контроллер 12 может определять уклон дорого по данным инклинометра 295 или по карте. Контроллер 12 может принимать от индикатора 293 поворота сигналы, информирующие контроллер о намерении водителя транспортного средства совершить поворот. Кроме того, контроллер 12 может получать от инклинометра 295 оценку уклона дороги. Дальномер 296 обеспечивает определение расстояния до объектов, находящихся на пути следования транспортного средства 201. Дальномер 296 может представлять собой радар, оптический датчик обнаружения и измерения расстояния (лидар), сонар или дальномер другого известного типа. Приемник 297 системы глобального позиционирования (GPS) принимает данные спутникового позиционирования, передаваемые спутником 290 в форме радиосигналов. Приемник 297 системы GPS принимает данные позиционирования, которые могут быть соотнесены с картами для определения расположения дорожных знаков или сигналов, уклона дороги и других параметров дороги, например, расстояния до различных элементов дороги, например, поворотов. Радиоприемник 298 принимает радиосигналы от стационарного радиопередатчика 291. Радиоприемник 298 может принимать информацию о расположении мест дорожных происшествий и задержек движения.
В соответствии с решением по фиг. 1 и 2, предлагается система для транспортного средства, содержащая: приводную систему, содержащую двигатель; педаль акселератора; педаль тормоза; трансмиссию, соединенную с двигателем, причем трансмиссия содержит муфту гидротрансформатора; и по меньшей мере один контроллер, содержащий исполнимые инструкции, сохраненные в долговременной памяти, для замыкания муфты гидротрансформатора и перевода приводной системы в режим свободного хода путем переключения трансмиссии на нейтральную передачу в ответ на ожидаемое в соответствии с условиями движения применение водителем тормозов, требуемый крутящий момент, меньший порогового, и скорость транспортного средства, большую пороговой. Система также содержит дополнительные инструкции для усиления торможения приводной системой в ответ на нажатие на педаль тормоза транспортного средства. Система также содержит дополнительные инструкции для усиления и ослабления торможения приводной системой путем увеличения и уменьшения выходной мощности компрессора кондиционера в зависимости от условий движения. Система предусматривает усиление торможения приводной системой в ответ на уменьшение расстояния между транспортным средством и объектом, находящимся на пути следования транспортного средства. Система предусматривает ослабление торможения приводной системой в ответ на увеличение расстояния между транспортным средством и объектом, находящимся на пути следования транспортного средства. Система также содержит дополнительные инструкции для прекращения сгорания топлива в двигателе и останова двигателя в ответ на ожидаемое в соответствии с условиями движения применение водителем тормозов, требуемый крутящий момент, меньший порогового, и скорость транспортного средства, большую пороговой.
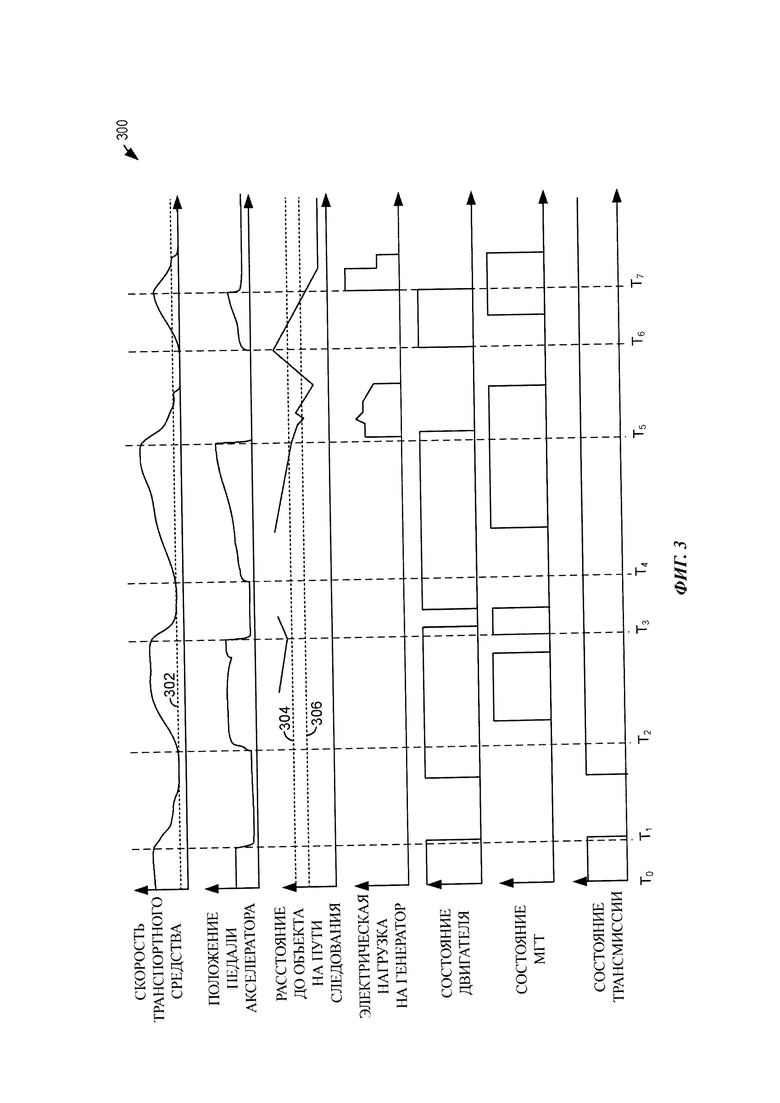
На фиг. 3 представлены примеры графиков моделирования последовательности работы транспортного средства в соответствии со способом по фиг. 4. Все графики на фиг. 3 синхронизированы по времени и отражают события, происходящие в одно и то же время.
На первом сверху графике фиг. 3 представлена зависимость скорости транспортного средства от времени. По горизонтальной оси отложено время, увеличивающееся на графике слева направо. По вертикальной оси отложена скорость транспортного средства, увеличивающаяся снизу вверх. Горизонтальная линия 302 обозначает минимальную скорость транспортного средства, при превышении которой может быть использовано торможение приводной системой.
На втором сверху графике фиг. 3 представлена зависимость положения педали акселератора от времени. По горизонтальной оси отложено время, увеличивающееся на графике слева направо. По вертикальной оси отложено положение педали акселератора, причем направление стрелки вертикальной оси соответствует большему нажатию педали акселератора.
На третьем сверху графике фиг. 3 представлена зависимость расстояния до объекта, расположенного на пути следования транспортного средства, от времени. По горизонтальной оси отложено время, увеличивающееся на графике слева направо. По вертикальной оси отложено расстояние до объекта, расположенного на пути следования транспортного средства. Расстояние до объекта, расположенного на пути следования транспортного средства, возрастает в направлении стрелки вертикальной оси. Отсутствие кривой в некоторые периоды временной последовательности означает отсутствие объекта на пути следования транспортного средства. Горизонтальная линия 304 обозначает первое пороговое расстояние между транспортным средством и объектом, расположенным на пути следования транспортного средства. Горизонтальная линия 306 обозначает второе пороговое расстояние между транспортным средством и объектом, расположенным на пути следования транспортного средства. Относительная скорость транспортного средства и объекта, расположенного на пути следования транспортного средства, может быть определена по углу наклона кривой, обозначающей расстояние между транспортным средством и объектом, расположенным на пути следования транспортного средства. Расстояние от транспортного средства до объекта, расположенного на пути следования транспортного средства, и их относительная скорость могут быть использованы для выбора между разными уровнями торможения приводной системой. Например, расстояние от транспортного средства до объекта, расположенного на пути следования транспортного средства, и их относительная скорость дают информацию о текущем положении, используемую для корректирования величины торможения приводной системой. Если расстояние между объектом и транспортным средством и относительная скорость транспортного средства и объекта (например, отношение разности расстояния между транспортным средством и объектом во второй (более поздний) момент и расстояния между транспортным средством и объектом в первый (более ранний) момент, к разности второго и первого моментов) указывают на желательность торможения, в приводную систему могут быть введены крутящий момент компрессора кондиционера и крутящий момент генератора. Если расстояние между объектом и транспортным средством и относительная скорость транспортного средства и объекта указывают на желательность небольшого торможения, кинетическая энергия транспортного средства может быть использована для уменьшения расстояния между транспортным средством и объектом, расположенным на пути следования транспортного средства, путем перехода в режим свободного хода. Кроме того, величина торможения приводной системой может быть повышена или понижена в зависимости от уклона дороги, например, путем изменения крутящего момента генератора. Регулирование работы транспортного средства в зависимости от расстояния между транспортным средством и объектом, расположенным на пути следования транспортного средства, и относительной скорости транспортного средства и объекта, расположенного на пути следования транспортного средства, может обеспечить возможность оптимизации использования кинетической энергии транспортного средства.
Следует отметить, что отрицательное значение относительной скорости транспортного средства и объекта, расположенного на пути следования транспортного средства, соответствует приближению транспортного средства к объекту, расположенному на пути его следования, а положительное значение скорости соответствует удалению транспортного средства от объекта, расположенному на пути его следования. Большая величина отрицательной скорости (например, -10 км/ч) соответствует более быстрому приближению транспортного средства к объекту, чем меньшая величина отрицательной скорости (например, -1 км/ч).
На четвертом сверху графике фиг. 3 представлена электрическая нагрузка генератора транспортного средства. Увеличение электрической нагрузки генератора транспортного средства приводит к увеличению отрицательного крутящего момента, который генератор сообщает двигателю и приводной системе транспортного средства. По вертикальной оси отложена электрическая нагрузка генератора транспортного средства. По горизонтальной оси отложено время, увеличивающееся на графике слева направо.
На пятом сверху графике фиг. 3 представлена зависимость режима работы двигателя от времени. По горизонтальной оси отложено время, увеличивающееся на графике слева направо. По вертикальной оси отложены режимы работы двигателя. Рабочий режим двигателя со сгоранием воздушно-топливной смеси соответствует более высокому положению кривой по направлению стрелки вертикальной оси. Положение кривой вблизи горизонтальной оси соответствует отсутствию сгорания воздушно-топливной смеси в двигателе.
При необходимости сохранения вращения двигателя без подачи в него топлива гидротрансформатор блокируют для сохранения вращения двигателя. Такой режим работы может быть назван состоянием отсечки топлива в режиме замедления (ОТРЗ).
На шестом сверху графике фиг. 3 представлена зависимость режима работы муфты гидротрансформатора (МГТ) от времени. По горизонтальной оси отложено время, увеличивающееся на графике слева направо. По вертикальной оси отложены режимы работы МГТ, причем более высокое положение кривой по направлению стрелки вертикальной оси соответствует замкнутому состоянию МГТ. Положение кривой вблизи горизонтальной оси соответствует разомкнутому состоянию МГТ.
На седьмом сверху графике фиг. 3 представлена зависимость режима работы трансмиссии от времени. По вертикальной оси отложены режимы работы трансмиссии, причем более высокое положение кривой по направлению стрелки вертикальной оси соответствует работе трансмиссии со включенной передачей, при которой приводная система не находится в режиме свободного хода. Режим свободного хода может быть получен в одном из двух вариантов. В первом из них используют одностороннюю муфту трансмиссии, которая не позволяет трению двигателя замедлять вращение колес вперед, когда крутящий момент, поступающий на одностороннюю муфту от двигателя, меньше, чем крутящий момент на колесной стороне односторонней муфты. Во втором варианте режима свободного хода трансмиссию транспортного средства переключают на нейтральную передачу, тем самым отсоединяя двигатель от приводной системы, начиная от муфт трансмиссии и ниже по направлению передачи крутящего момента. Положение кривой вблизи горизонтальной оси соответствует работе приводной системы в режиме свободного хода. Трансмиссия может находиться в режиме свободного хода в случае переключения трансмиссии на нейтральную передачу. В альтернативном варианте трансмиссия может находиться в режиме свободного хода в случае наличия в трансмиссии односторонней муфты и поступления от колес транспортного средства крутящего момента, ускоряющего вращение выходного вала трансмиссии в том же направлении, в котором происходит ускорение вращения выходного вала трансмиссии, когда трансмиссия находится в режиме передачи переднего хода, а двигатель транспортного средства подает крутящий момент на входной вал трансмиссии.
В момент Т0 транспортное средство находится в движении, а педаль акселератора нажата до среднего уровня. Объект на пути следования транспортного средства отсутствует, и электрическая нагрузка на генератор мала. Двигатель работает в режиме сгорания воздушно-топливной смеси, гидротрансформатор не заблокирован. Кроме того, трансмиссия включена, и приводная система не находится в режиме свободного хода.
В момент T1 водитель отпускает педаль акселератора почти полностью. Скорость транспортного средства начинает падать в связи с уменьшением требуемого крутящего момента (например, определенным изменением положения педали акселератора). Относительная скорость транспортного средства и объекта, расположенного на пути следования транспортного средства, мала, так как объект на пути следования транспортного средства отсутствует. Таким образом, оценка ситуации (например, информация о расстоянии до объекта и скорости транспортного средства относительно объекта) указывает на потребность в чрезвычайно малом торможении приводной системой, и кинетическая энергия транспортного средства может быть использована не для менее производительной зарядки батареи или работы компрессора кондиционер, а для увеличения запаса хода транспортного средства. Поэтому, в связи с отсутствием объекта на пути следования транспортного средства, ожидаемых изменений состояния дороги и состояния дорожного движения, в связи с которыми можно было бы ожидать нажатия водителем на педаль тормоза в течение заранее заданного промежутка времени или в пределах заранее заданного участка пути, электрическая нагрузка на генератор остается низкой. После момента Т1 в ответ на уменьшение требуемого крутящего момента происходит постепенное отключение двигателя с прекращением сгорания в нем воздушно-топливной смеси, что обеспечивает экономию топлива. Гидротрансформатор разблокирован, а трансмиссия переключена на нейтральную передачу, в результате чего приводная система находится в режиме свободного хода, и передача крутящего момента с колес транспортного средства на двигатель отсутствует. В результате вращение двигателя прекращается. Однако если остановка (например, прекращение вращения) двигателя нежелательна в данной конфигурации транспортного средства, то в случае предполагаемой по результатам оценки ситуации низкой потребности в торможении транспортного средства гидротрансформатор может быть заблокирован, а подача топлива в двигатель прекращена. Такие состояния могут быть использованы в отсутствие требований торможения или вероятности их возникновения. Они соответствуют одному из примеров первого уровня торможения приводной системой.
Между моментами Т1 и Т2 производят повторное включение двигателя и переключение трансмиссии на передачу переднего хода (например, первую передачу). Двигатель включают, а трансмиссию переключают на передачу для обеспечения ненулевого крутящего момента, требуемого в соответствии с положением педали акселератора.
В момент Т2 водитель (не представлен) увеличивает давление на педаль акселератора в связи с условиями движения. Скорость транспортного средства начинает возрастать в связи с данным положением педали акселератора. Объекта на пути следования транспортного средства нет, ожидаемые изменения состояния дороги и условия движения, в связи с которыми можно было бы ожидать нажатия водителем на педаль тормоза в течение заранее заданного промежутка времени, отсутствуют. Электрическая нагрузка на генератор мала, а двигатель работает со сгоранием в нем воздушно-топливной смеси. Гидротрансформатор разблокирован, а трансмиссия установлена на передачу.
Между моментами Т2 и Т3 на пути следования транспортного средства возникает объект, причем педаль акселератора нажата. Двигатель продолжает работать со сгоранием воздушно-топливной смеси. Происходит блокирование гидротрансформатора и его последующее разблокирование вблизи момента Т3 в соответствии с положением педали акселератора. Трансмиссия включена, и приводная система не находится в режиме свободного хода. Если нажатие водителем на педаль акселератора превышает пороговую величину, торможения приводной системой не используют.
В момент Т3 водитель отпускает педаль акселератора до почти полностью отпущенного положения. Скорость транспортного средства начинает спадать в связи с уменьшением требуемого крутящего момента. Электрическая нагрузка на генератор остается малой, так как расстояние до объекта, находящегося на пути следования транспортного средства, превышает первое пороговое расстояние 304, а скорость транспортного средства относительно объекта, находящегося на пути следования транспортного средства, мала. Кроме того, электрическая нагрузка на генератор остается малой в связи с отсутствием ожидаемых изменений состояния дороги и условий движения, в связи с которыми можно было бы ожидать нажатия водителем на педаль тормоза в течение заранее заданного промежутка времени или на протяжении порогового расстояния 304 до места изменения условий движения. Вскоре после момента Т3 происходит отключение двигателя в связи с уменьшением требуемого крутящего момента и для прекращения сгорания воздушно-топливной смеси с целью экономии топлива. После прекращения сгорания в двигателе воздушно-топливной смеси и при продолжении вращения двигателя за счет кинетической энергии транспортного средства и замкнутой муфты гидротрансформатора двигатель подает в приводную систему крутящий момент торможения двигателем (например, отрицательный крутящий момент). Муфта гидротрансформатора переведена из разомкнутого состояния в замкнутое, а трансмиссия включена на передачу, чтобы исключить работу приводной системы в режиме свободного хода и обеспечить возможность создания двигателем тормозного крутящего момента, противодействующего крутящему моменту, поступающему в приводную систему от колес транспортного средства. Данное положение соответствует одному из примеров второго уровня торможения приводной системой, превышающего первый уровень.
Между моментами Т3 и Т4 происходит уменьшение скорости транспортного средства за счет торможения двигателем. В связи с низкой скоростью транспортного средства и низким уровнем требуемого крутящего момента, определенного положением педали акселератора, двигатель повторно включают и возобновляют сгорание в нем воздушно-топливной смеси. Расстояние до объекта, находящегося на пути следования транспортного средства, возрастает в связи с увеличением скорости объекта относительно транспортного средства. Электрическая нагрузка на генератор мала, так как расстояние до объекта, находящегося на пути следования транспортного средства, превышает пороговое расстояние 304, а также в связи с отсутствием ожидаемых изменений состояния дороги и условий движения, в связи с которыми можно было бы ожидать нажатия водителем на педаль тормоза в течение заранее заданного промежутка времени или в пределах порогового расстояния 304 до места изменения условий движения. Двигатель повторно включен и начинает производить сжигание воздушно-топливной смеси в связи с тем, что в момент нажатия на педаль акселератора скорость транспортного средства меньше порогового уровня 302. Трансмиссия включена на передачу переднего хода, в результате чего происходит передача крутящего момента между двигателем и колесами транспортного средства, и приводная система не находится в режиме свободного хода. Объект, находящийся на пути следования транспортного средства, покидает путь следования транспортного средства. Повторный запуск двигателя (в минимальном режиме) происходит при движении транспортного средства вперед, не дожидаясь отпускания водителем педали тормоза. Двигатель и трансмиссия получают дополнительное время для перехода в режим «готовности к ускорению». Это справедливо для режимов автоматического останова и холостого хода на нейтральной передаче.
В момент Т4 происходит нажатие на педаль акселератора для увеличения требуемого крутящего момента, и транспортное средство начинает увеличивать скорость в соответствии с положением педали акселератора. Электрическая нагрузка на генератор остается малой, так как объекта на пути следования транспортного средства отсутствуют. В двигателе происходит сгорание воздушно-топливной смеси, а муфта гидротрансформатора разомкнута. Трансмиссия включена на передачу переднего хода.
Между моментами Т4 и Т5 на пути следования транспортного средства возникает объект, причем транспортное средство сокращает расстояние до объекта до величины, меньшей порогового расстояния 304. Электрическая нагрузка на генератор остается малой, а в двигателе по-прежнему происходит сгорание воздушно-топливной смеси. Муфта гидротрансформатора замкнута, а трансмиссия включена на передачу переднего хода. Нажатие педали акселератора возрастает, что приводит к увеличению ускорения транспортного средства.
В момент Т5 водитель частично отпускает педаль акселератора. Скорость транспортного средства падает в связи с уменьшением требуемого крутящего момента. Электрическая нагрузка на генератор возрастает в связи с наличием на пути следования транспортного средства объекта, расстояние до которого меньше первого порогового расстояния 304, и высокой скоростью транспортного средства относительно объекта, находящегося на пути следования транспортного средства. Увеличение электрической нагрузки на генератор увеличивает отрицательный крутящий момент, прилагаемый генератором к двигателю и приводной системе. Двигатель прекращает сжигание воздушно-топливной смеси, но продолжает вращение, в результате чего тормозной крутящий момент приводной системы включает в себя как тормозной крутящий момент двигателя, так и отрицательный крутящий момент генератора. Таким образом, тормозной крутящий момент приводной системы увеличен по сравнению с тормозным крутящим моментом приводной системы в момент Т3 в связи с наличием на пути следования транспортного средства объекта, расстояние до которого меньше первого порогового расстояния 304, и увеличением скорости транспортного средства относительно объекта, находящегося на пути следования транспортного средства. Это обеспечивает возможность более быстрого замедления транспортного средства. Кроме того, поскольку муфта гидротрансформатора заблокирована, а трансмиссия включена на передачу переднего хода, тормозной крутящий момент генератора и двигателя может противодействовать крутящему моменту, поступающему в приводную систему от колес транспортного средства. Данное положение соответствует одному из примеров третьего уровня торможения приводной системой, превышающего второй уровень.
Между моментами Т5 и Т6 расстояние между транспортным средством и объектом возрастает, а затем падает. Электрическая нагрузка на генератор падает в связи с увеличением расстояния между транспортным средством и объектом для экономии топлива, но затем электрическая нагрузка на генератор возрастает в связи с уменьшением расстояния между транспортным средством и объектом. Двигатель не производит сжигания воздушно-топливной смеси, но продолжает вращение за счет крутящего момента, производимого колесами транспортного средства в результате инерции транспортного средства. Муфта гидротрансформатора остается замкнутой до падения скорости транспортного средства ниже порогового уровня 302. При падении скорости транспортного средства ниже порогового уровня 302 двигатель начинает сжигание воздушно-топливной смеси, а муфта гидротрансформатора переходит в разомкнутое положение.
В момент Т6 водитель (не представлен) нажимает на педаль акселератора, и транспортное средство начинает увеличивать скорость. По мере увеличения скорости движения транспортного средства в направлении объекта расстояние между транспортным средством и объектом, находящимся на пути следования транспортного средства, падает. Электрическая нагрузка на генератор мала, а двигатель производит сжигание воздушно-топливной смеси для ускорения транспортного средства. Муфта гидротрансформатора разомкнута для обеспечения возможности мультипликации крутящего момента в гидротрансформаторе. Трансмиссия включена на переднюю передачу.
В момент Т7 водитель частично отпускает педаль акселератора. Вскоре после этого сжигание воздушно-топливной смеси в двигателе прекращают, но двигатель продолжает вращение, а электрическую нагрузку на генератор увеличивают до более высокого уровня, на один уровень превышающего уровень, использованный в момент Т5. Увеличение электрической нагрузки на генератор до более высокого уровня происходит в связи с расстоянием между транспортным средством и объектом, находящимся на пути следования транспортного средства, меньшим второго порогового расстояния 306, и большей величиной отрицательной относительной скорости транспортного средства и объекта, находящегося на пути следования транспортного средства. Увеличение электрической нагрузки приводит к увеличению отрицательного крутящего момента, прилагаемого генератором к приводной системе и двигателю, что приводит к усилению замедления транспортного средства. При падении скорости транспортного средства ниже порогового уровня 302 двигатель начинает сжигание воздушно-топливной смеси, а муфта гидротрансформатора переходит в разомкнутое положение. Данное положение соответствует одному из примеров четвертого уровня торможения приводной системой, превышающего третий уровень.
Таким образом, тормозной крутящий момент приводной системы может быть скорректирован в соответствии с условиями движения, в том числе и наличием объектов на пути следования транспортного средства. Регулируемое торможение приводной системой может увеличивать топливную экономичность транспортного средства при применении торможения приводной системой малой интенсивности в отсутствие ожидаемого требования торможения водителем. Кроме того, более интенсивное использование торможения приводной системой может быть использовано для уменьшения износа фрикционных тормозов, повышения эффективности торможения при ожидаемой возможности требования торможения водителем.
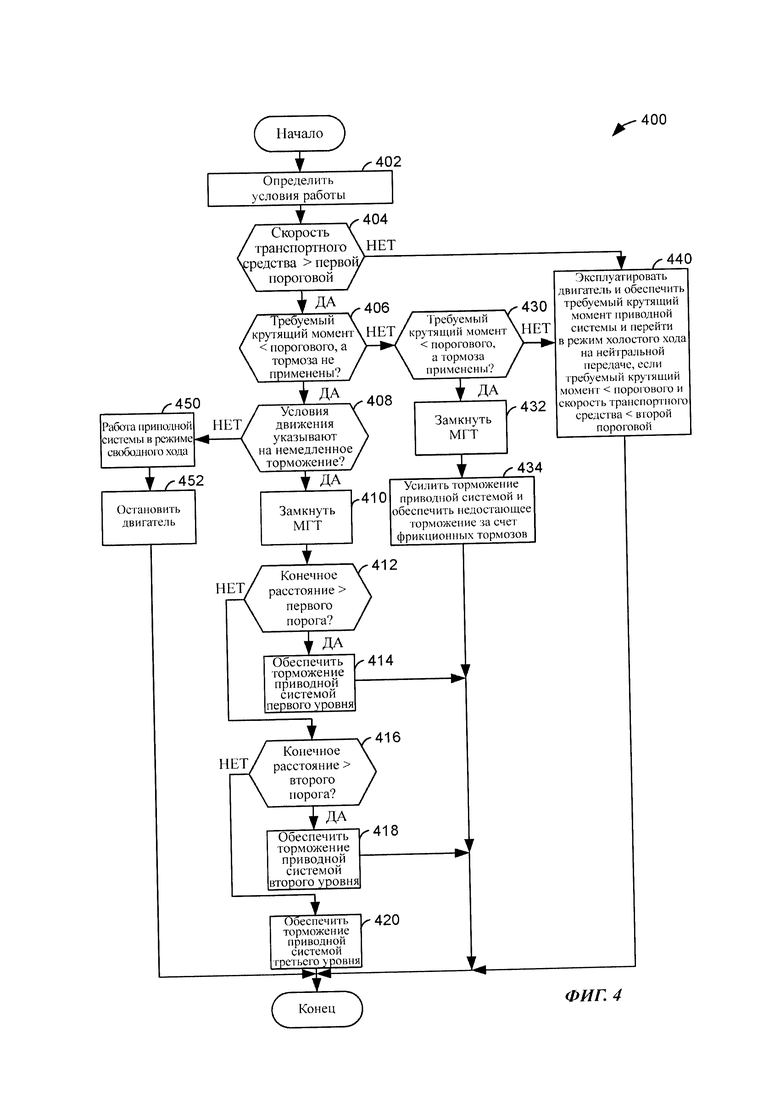
На фиг. 4 представлен способ эксплуатации транспортного средства. Способ по фиг. 4 может быть сохранен в виде исполнимых инструкций в постоянной памяти контроллера 12, описанного со ссылками на фиг. 1 и 2. Кроме того, способ по фиг. 4 обеспечивает выполнение рабочей последовательности, описанной со ссылками на фиг. 3. Кроме того, по меньшей мере некоторые из этапов способа по фиг. 4 могут представлять собой действия, выполняемые с использованием контроллера в реальном мире для изменения работы транспортного средства.
На этапе 402 способа 400 определяют условия работы. В число условий работы могут в частности, но не исключительно входить частота вращения двигателя, нагрузка на двигатель, скорость транспортного средства, требуемый водителем крутящий момент, положение педали акселератора, положение педали тормоза, скорость транспортного средства, уклон дороги, расстояние до объектов, находящихся на пути следования транспортного средства, условия движения, изменения маршрута движения транспортного средства и температура двигателя. Затем способ 400 переходит к этапу 404.
На этапе 404 способа 400 проверяют, превышает ли скорость транспортного средства первое пороговое значение. Первое пороговое значение может составлять, например, менее 10 км/ч. Если устанавливают, что скорость транспортного средства не меньше первого порогового значения («НЕТ»), способ 400 переходит к этапу 440. В противном случае («ДА») способ 400 переходит к этапу 406.
На этапе 440 способа 400 двигатель работает, производя сжигание воздушно-топливной смеси для получения необходимого или требуемого крутящего момента. Требуемый крутящий момент может соответствовать требуемому водителем крутящему моменту, определенном по положению педали акселератора, а также может соответствовать крутящему моменту, обеспечивающему частоту вращения двигателя, не меньшую частоты вращения двигателя на холостом ходу, и крутящий момент (например, минимальный крутящий момент), обеспечивающий перемещение транспортного средства с малой скоростью без нажатия оператором на педаль акселератора. Кроме того, при требуемом крутящем моменте, меньшем порогового крутящего момента, и скорости транспортного средства, превышающей вторую пороговую скорость, трансмиссия транспортного средства может быть переключена на нейтральную передачу при работе двигателя в режиме холостого хода (например, в режиме холостого хода на нейтральной передаче). Если двигатель ранее был остановлен на этапе 452, производят его перезапуск. Затем способ 400 завершает работу.
На этапе 406 способа 400 определяют, меньше ли требуемый крутящий момент порогового крутящего момента при не нажатой педали тормоза. Если это так («ДА»), то способ 400 переходит к этапу 408. В противном случае («НЕТ») способ 400 переходит к этапу 430. В соответствии с одним из примеров осуществления, требуемый крутящий момент может быть определен по положению педали акселератора и скорости транспортного средства при помощи справочной таблицы эмпирически определенных значений требуемого крутящего момента. Требуемый крутящий момент может быть скорректирован с учетом минимального крутящего момента и крутящего момента холостого хода, как указано выше.
На этапе 430 способа 400 определяют, меньше ли требуемый крутящий момент порогового крутящего момента при нажатой водителем педали тормоза. В альтернативном варианте могут определять, меньше ли требуемый крутящий момент порогового крутящего момента при применяемых посредством контроллера тормозах транспортного средства. Если это так («ДА»), то способ 400 переходит к этапу 432. В противном случае («НЕТ») способ 400 переходит к этапу 440.
На этапе 432 способа 440 производят замыкание муфты гидротрансформатора (МГТ), если она полностью или частично разомкнута (например, если разница между частотой вращения рабочего колеса гидротрансформатора и частотой вращения турбины гидротрансформатора превышает пороговое значение). Если муфта гидротрансформатора уже замкнута, ее оставляют в замкнутом положении. Кроме того, если двигатель был остановлен на этапе 452 и находится в остановленном состоянии на этапе 410, замыкание МГТ может вызвать вращение двигателя, или же двигатель может быть запущен (путем подачи в него топлива) и разогнан до частоты вращения входного вала трансмиссии для уменьшения возмущений крутящего момента приводной системы перед последующим повторным остановом двигателя на этапе 434. Затем способ 400 переходит к этапу 434.
На этапе 434 способа 400 в ответ на поступление через педаль тормоза или от других источников требования торможения усиливают торможение приводной системой и обеспечивают недостающее торможение за счет фрикционных тормозов. В соответствии с одним из примеров осуществления, величину тормозного крутящего момента, прилагаемого к транспортному средству, определяют по положению педали тормоза. Интенсивность торможения приводной системой может быть увеличена до максимальной интенсивности торможения приводной системой, определяемой по уровню зарядки батареи, наличию других электрических нагрузок транспортного средства и другим параметрам состояния транспортного средства. Например, при низком уровне зарядки батареи и наличии средств обогрева ветрового стекла электрическая нагрузка на генератор может быть увеличена до номинальной выходной силы тока генератора (например, равной 120 амперам) для приложения генератором к двигателю и приводной системе максимального отрицательного крутящего момента. Однако если уровень зарядки батареи ограничивает силу тока, подаваемого на батарею, электрическая нагрузка генератора может быть меньше номинальной выходной силы тока генератора (например, равной 70 амперам), что уменьшает величину отрицательного крутящего момента, прилагаемого генератором к двигателю и приводной системе. Дальнейшее усиление торможения приводной системой может быть обеспечено путем замыкания муфты компрессора кондиционера или увеличения рабочего объема компрессора кондиционера. Включение компрессора кондиционера приводит к накоплению хладагента под давлением в системе климат-контроля транспортного средства. Кроме того, может быть предусмотрено торможение двигателем путем остановки сгорания в двигателе в результате прекращения подачи топлива в двигатель при вращении двигателя за счет крутящего момента, поступающего от колес транспортного средства. Тормозной крутящий момент двигателя может быть скорректирован и увеличен путем изменения фаз газораспределения для увеличения насосных потерь в двигателе. Сочетание тормозного крутящего момента двигателя, крутящего момента генератора, прилагаемого к приводной системе, и крутящего момента компрессора кондиционера, прилагаемого к приводной системе, может быть названо тормозным крутящим моментом приводной системы. Тормозной крутящий момент приводной системы может быть вычтен из величины тормозного крутящего момента, требуемого водителем через педаль тормоза или через контроллер. Оставшийся тормозной крутящий момент, полученный в результате такого вычитания, может быть обеспечен за счет фрикционных тормозов так, чтобы сумма тормозного крутящего момента приводной системы и тормозного крутящего момента колесных тормозов соответствовала требуемому тормозному крутящему моменту транспортного средства (например, тормозному крутящему моменту, требуемому водителем через педаль тормоза, или тормозному крутящему моменту, требуемому контроллером). Таким образом, тормозной крутящий момент приводной системы и тормозной крутящий момент фрикционных тормозов могут быть скорректированы так, чтобы обеспечить требуемый тормозной крутящий момент, причем для получения требуемого тормозного крутящего момента преимущественно используют тормозной крутящий момент приводной системы для уменьшения износа тормозов. Затем способ 400 завершает работу.
На этапе 408 способа 400 определяют, предполагают ли условия движения или условия регулирования движения неизбежное или ожидаемое торможение и/или замедление транспортного средства. В соответствии с одним из примеров осуществления, способа 400, определяют, позволяют ли условия движения ожидать, что водитель приведет в действие тормоза транспортного средства или уменьшит требуемый крутящий момент для замедления транспортного средства в течение заранее заданного промежутка времени или в пределах заранее заданного участка пути транспортного средства. В случае ожидания торможения или замедления может быть сделан вывод о будущем поступлении от водителя или контроллера требования торможения и/или замедления. Следует отметить, что замедление транспортного средства может происходить без торможения транспортного средства.
В соответствии с одним из примеров осуществления, условие движения, указывающее на ожидаемое в течение заранее заданного промежутка времени торможение и/или замедление транспортного средства представляет собой включение индикатора поворота. В случае переключения индикатора поворота из выключенного состояние в состояние, указывающее на выполнение правого или левого поворота можно ожидать, что в течение заранее заданного промежутка времени (например, 30 секунд) водитель включит тормоза транспортного средства или по меньшей мере частично отпустит педаль акселератора для обеспечения возможности выполнения будущего поворота, о котором сигнализирует индикатор поворота.
В соответствии с другим примером осуществления, условия движения, указывающие на ожидаемое в пределах заранее заданного участка пути торможение и/или замедление транспортного средства, представляют собой нахождение транспортного средства в пределах заранее заданного расстояния от перекрестка, определенное по данным GPS и географическим картам, сохраненным в памяти контроллера. Географические карты могут указывать на наличие на перекрестке сигнала регулирования дорожного движения или дорожного знака, требующего остановки транспортного средства. Таким образом, при нахождении транспортного средства в пределах заранее заданного расстояния от такого перекрестка условия движения могут указывать на ожидаемое торможение и/или замедление транспортного средства в пределах заранее заданного расстояния в зависимости от местоположения перекрестка и/или информации о дорожных сигналах, сохраненных на картах.
В соответствии с другим примером осуществления, условия движения могут указывать на ожидаемое или неизбежное замедление и/или торможение транспортного средства на основании передаваемой по широковещательной связи информации о местоположении дорожного происшествия или задержки движения в связи с дорожными работами. В случае нахождения транспортного средства в пределах заранее заданного расстояния от такого места может быть констатировано ожидаемое или неизбежное замедление и/или торможение транспортного средства.
Условия движения, которые могут требовать замедления или торможения транспортного средства, также могут включать в себя условие, в котором водитель не нажимает на педаль акселератора, а на пути следования транспортного средства в пределах заранее заданного расстояния находится объект. Например, в соответствии со способом 400, может быть определено, что условия движения требуют неизбежного торможения транспортного средства, когда водитель не нажимает на педаль акселератора, а на пути следования транспортного средства в пределах заранее заданного расстояния (например, равного 400 метрам) находится объект. Наличие объекта на пути следования транспортного средства может быть установлено бортовой видеокамерой транспортного средства, радаром, лидаром или датчиками других известных типов.
Если устанавливают, что торможение или замедление транспортного средства ожидаемо или может быть затребовано («ДА»), способ 400 переходит к этапу 410. В противном случае («НЕТ») способ 400 переходит к этапу 450. Отсутствие указанных условий может указывать на отсутствие ожиданий торможения или замедления транспортного средства.
На этапе 450 способ 400 переключает приводную систему в режим свободного хода. Приводная система может быть переключена в режим свободного хода путем переключения трансмиссии на нейтральную передачу. В альтернативном варианте осуществления трансмиссия приводной системы может содержать одностороннюю муфту, допускающую лишь передачу крутящего момента от двигателя на колеса транспортного средства, но не от колес транспортного средства на двигатель. Переключение в режим свободного хода обеспечивает возможность сокращения потерь на торможение и трение в приводной системе для увеличения расстояния движения транспортного средства по инерции. После переключения в режим свободного хода способ 400 переходит к этапу 452.
На этапе 452 способа 400 может быть прекращена подача топлива в двигатель и произведен останов двигателя. Прекращение подачи топлива в двигатель обеспечивает возможность сокращения потребления топлива двигателем. В соответствии с другими примерами осуществления, двигатель может по-прежнему получать топливо и производить сжигание воздушно-топливной смеси, работая на холостом ходу. Затем способ 400 завершает работу.
На этапе 410 способа 400 муфту гидротрансформатора (МГТ) замыкают, если она полностью или частично разомкнута (например, если разница между частотой вращения рабочего колеса гидротрансформатора и частотой вращения турбины гидротрансформатора превышает пороговое значение). Если муфта гидротрансформатора уже замкнута, ее оставляют в замкнутом положении. Кроме того, если двигатель был остановлен на этапе 452 и находится в остановленном состоянии на этапе 410, замыкание МГТ может вызвать вращение двигателя, или же двигатель может быть запущен (путем подачи в него топлива) и разогнан до частоты вращения входного вала трансмиссии перед последующим повторным остановом двигателя на этапе 414, 418 или 420. Затем способ 400 переходит к этапу 412.
На этапе 412 способа 400 определяют, превышает ли расстояние между транспортным средством и объектом, обнаруженным на пути следования транспортного средства, первое пороговое расстояние, или превышает ли расстояние до места, в котором условия движения предположительно должны вызвать торможение или замедление транспортного средства, первое пороговое расстояние. Если расстояние между транспортным средством и объектом, обнаруженным на пути следования транспортного средства, превышает первое пороговое расстояние, или расстояние до места, в котором условия движения предположительно должны вызвать торможение или замедление транспортного средства, превышает первое пороговое расстояние («ДА»), то способ 400 переходит к этапу 414. Кроме того, если условия движения предположительно должны возникнуть через промежуток времени, превышающий первый пороговый промежуток времени, то способ 400 также переходит к этапу 414. В противном случае способ 400 переходит к этапу 416.
На этапе 414 способа 400 производят торможение приводной системой первого уровня (например, нижнего уровня) для замедления транспортного средства. В соответствии с одним из примеров осуществления, подачу топлива в двигатель прекращают, чтобы прекратить сжигание двигателем воздушно-топливной смеси. Однако двигатель продолжает вращение за счет энергии, поступающей в двигатель от колес транспортного средства. Таким образом, способ 400 обеспечивает торможение приводной системы двигателем для замедления транспортного средства. Нагрузку, создаваемую в приводной системе генератором, не увеличивают, и компрессор кондиционера не включают. Кроме того, в соответствии с некоторыми из примеров осуществления, торможение двигателем может быть дополнительно усилено или ослаблено путем регулирования фаз газораспределения двигателя и насосного действия двигателя. В соответствии с одним из примеров осуществления, торможение двигателем усиливают в ответ на увеличение значения отрицательной скорости транспортного средства относительно объекта или условия движения на пути следования транспортного средства. Например, если в первый момент расстояние от транспортного средства до объекта составляет 100 метров, а во второй момент - 50 метров, причем между первым и вторым моментами проходит одна секунда, то скорость транспортного средства относительно объекта равна (50 м - 100 м) / 1 с = -50 м/с, и торможение двигателем может быть увеличено на 5 Н⋅м. Однако если в первый момент расстояние от транспортного средства до объекта составляет 50 метров, а во второй момент - 100 метров, причем между первым и вторым моментами проходит одна секунда, то скорость транспортного средства относительно объекта равна (100 м - 50 м) / 1 с = 50 м/с, и торможение двигателем может быть уменьшено на 5 Н⋅м.
Таким образом, может быть обеспечена основная величина торможения приводной системой, причем основная величина торможения приводной системой может быть скорректирована в соответствии с относительной скоростью движения транспортных средств. Затем способ 400 завершает работу.
На этапе 416 способа 400 определяют, превышает ли расстояние между транспортным средством и объектом, обнаруженным на пути следования транспортного средства, второе пороговое расстояние (например, меньшее первого порогового расстояния), или превышает ли расстояние до места, в котором условия движения предположительно должны вызвать торможение или замедление транспортного средства, второе пороговое расстояние. Если расстояние между транспортным средством и объектом, обнаруженным на пути следования транспортного средства, превышает второе пороговое расстояние, или расстояние до места, в котором условия движения предположительно должны вызвать торможение или замедление транспортного средства, превышает первое пороговое расстояние («ДА»), то способ 400 переходит к этапу 418. Кроме того, если условия движения предположительно должны возникнуть через промежуток времени, превышающий второй пороговый промежуток времени (например, меньший, чем первый промежуток времени), то способ 400 также переходит к этапу 418. В противном случае способ 400 переходит к этапу 420
На этапе 418 способа 400 производят торможение приводной системой второго уровня (например, среднего уровня) для замедления транспортного средства, причем второй уровень выше первого уровня. В соответствии с одним из примеров осуществления, подачу топлива в двигатель прекращают, чтобы прекратить сжигание двигателем воздушно-топливной смеси. Однако двигатель продолжает вращение за счет энергии, поступающей в двигатель от колес транспортного средства. Таким образом, способ 400 обеспечивает торможение приводной системы двигателем для замедления транспортного средства. Кроме того, увеличивают нагрузку, создаваемую в приводной системе генератором, или включают компрессор кондиционера, но выполняют лишь одну из этих операций. Кроме того, в соответствии с некоторыми из примеров осуществления, торможение двигателем может быть дополнительно усилено или ослаблено путем регулирования фаз газораспределения двигателя и насосного действия двигателя. Нагрузка, создаваемая в приводной системе генератором, аналогичным образом может быть увеличена или уменьшена путем увеличения или уменьшения электрической нагрузки на генератор. Нагрузка, создаваемая в приводной системе компрессором кондиционера, также может быть увеличена или уменьшена путем увеличения или уменьшения рабочего объема компрессора кондиционера. Нагрузка, создаваемая торможением двигателем, генератором и/или компрессором кондиционера, может быть увеличена в ответ на увеличение отрицательного значения скорости транспортного средства относительно объекта или условий движения, находящихся на пути следования транспортного средства. Нагрузка, создаваемая торможением двигателем, генератором и/или компрессором кондиционера, может быть уменьшена в ответ на увеличение положительного значения скорости транспортного средства относительно объекта или условий движения, находящихся на пути следования транспортного средства. Таким образом, может быть обеспечена вторая основная величина торможения приводной системой, причем основная величина торможения приводной системой может быть скорректирована в соответствии со скоростью движения транспортного средства относительно объекта или условий движения. Затем способ 400 завершает работу.
На этапе 420 способа 400 производят торможение приводной системой третьего уровня (например, высшего уровня) для замедления транспортного средства, причем третий уровень выше второго уровня. В соответствии с одним из примеров осуществления, подачу топлива в двигатель прекращают, чтобы прекратить сжигание двигателем воздушно-топливной смеси. Однако двигатель продолжает вращение за счет энергии, поступающей в двигатель от колес транспортного средства. Таким образом, способ 400 обеспечивает торможение приводной системы двигателем для замедления транспортного средства. Кроме того, увеличивают нагрузку, создаваемую в приводной системе генератором, и включают компрессор кондиционера. Кроме того, в соответствии с некоторыми из примеров осуществления, торможение двигателем может быть дополнительно усилено или ослаблено путем регулирования фаз газораспределения двигателя и насосного действия двигателя. Нагрузка, создаваемая в приводной системе генератором, аналогичным образом может быть увеличена или уменьшена путем увеличения или уменьшения электрической нагрузки на генератор. Нагрузка, создаваемая в приводной системе компрессором кондиционера, также может быть увеличена или уменьшена путем увеличения или уменьшения рабочего объема компрессора кондиционера. Нагрузка, создаваемая торможением двигателем, генератором и/или компрессором кондиционера, может быть увеличена в ответ на увеличение отрицательного значения скорости транспортного средства относительно объекта или условий движения, находящихся на пути следования транспортного средства. Нагрузка, создаваемая торможением двигателем, генератором и/или компрессором кондиционера, может быть уменьшена в ответ на увеличение положительного значения скорости транспортного средства относительно объекта или условий движения, находящихся на пути следования транспортного средства. Таким образом, может быть обеспечена третья основная величина торможения приводной системой, причем основная величина торможения приводной системой может быть скорректирована в соответствии со скоростью движения транспортного средства относительно объекта или условий движения. Затем способ 400 завершает работу.
Представленный на фиг. 4 способ представляет собой способ эксплуатации транспортного средства, включающий в себя: замедление транспортного средства путем переключения приводной системы в режим свободного хода в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, и условия движения, не указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути. В соответствии с данным способом, переключение приводной системы в режим свободного хода производят при помощи односторонней муфты или путем переключения автоматической трансмиссии транспортного средства на нейтральную передачу. Способ дополнительно включает в себя прекращение сгорания в двигателе приводной системы при работе в режиме свободного хода и прекращение вращения двигателя при работе приводной системы в режиме свободного хода. В соответствии с данным способом, условия движения определяют с использованием дальномера. В соответствии с данным способом, условия движения включают в себя отсутствие утвержденного индикатора поворота транспортного средства. В соответствии с данным способом, условия движения определяют по сигналу или знаку регулирования дорожного движения. В соответствии с данным способом, условия движения определяют по сигналу широковещательной передачи.
Представленный на фиг. 4 способ также представляет собой способ эксплуатации транспортного средства, включающий в себя: замедление транспортного средства путем переключения приводной системы в режим свободного хода в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, отсутствие нажатия на педаль тормоза транспортного средства и условия движения, не указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути; и замедление транспортного средства путем прекращения подачи топлива в двигатель транспортного средства при вращении двигателя и заблокированной муфте гидротрансформатора в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, отсутствие нажатия на педаль тормоза транспортного средства и условия движения, указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути.
В соответствии с некоторыми из примеров осуществления, способ включает в себя, что замедление транспортного средства путем прекращения подачи топлива в двигатель транспортного средства при вращении двигателя и заблокированной муфте гидротрансформатора дополнительно основано на расстоянии между транспортным средством и объектом, находящимся на пути следования транспортного средства, большим первого порогового расстояния. Способ дополнительно включает в себя увеличение интенсивности замедления транспортного средства в ответ на то, что расстояние между транспортным средством и объектом, находящимся на пути следования транспортного средства, меньше первого порогового расстояния, причем интенсивность замедления транспортного средства увеличивают путем увеличения электрической нагрузки на генератор транспортного средства. Способ дополнительно включает в себя увеличение интенсивности замедления транспортного средства в ответ на то, что расстояние между транспортным средством и объектом, находящимся на пути следования транспортного средства, меньше второго порогового расстояния, причем интенсивность замедления транспортного средства увеличивают путем увеличения выходной мощности компрессора кондиционера. Способ дополнительно включает в себя замедление транспортного средства при помощи фрикционных колесных тормозов и прекращения подачи топлива в двигатель транспортного средства при вращении двигателя и заблокированной муфте гидротрансформатора в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой и нажатие на педаль тормоза. В соответствии с данным способом, крутящий момент фрикционных колесных тормозов и крутящий момент двигателя складывают для получения крутящего момента, требуемого в соответствии с нажатием педали тормоза. В соответствии с данным способом, работа в режиме свободного хода включает в себя переключение трансмиссии на нейтральную передачу, причем частоту вращения двигателя приводной системы поддерживают на уровне, превышающем частоту вращения двигателя на холостом ходу.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут исполняться системой управления, содержащей контроллеры в сочетании с различными датчиками, исполнительными устройствами и другими компонентами двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ, описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, причем раскрытые действия выполняются путем исполнения инструкций в системе управления. Действия управления также могут изменять рабочее состояние одного или нескольких датчиков или исполнительных механизмов, существующих в реальном мире, во время выполнения раскрытых действий путем исполнения инструкций в системе, содержащей различные аппаратные компоненты двигателя в сочетании с одним или несколькими контроллерами.
Этим завершается настоящее описание. По его прочтении специалист в данной области может предусмотреть многочисленные изменения и модификации, не выходящие за пределы объема и сути настоящего изобретения. Например, решения по настоящему изобретению могут быть выгодно применены к двигателям со схемами расположения цилиндров I3, I4, I5, V6, V8, V10 и V12, работающими на природном газе, бензине, дизельном топливе или альтернативных сочетаниях разных видов топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ ДАВЛЕНИЯ ВО ВПУСКНОМ КОЛЛЕКТОРЕ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2693369C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ПРИВОДНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ПРИВОДНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2689058C2 |
| СПОСОБ ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2588390C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЮФТОМ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ЛЮФТОМ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2640085C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
| СПОСОБ РАБОТЫ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2640433C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) И СИСТЕМА ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА | 2013 |
|
RU2640676C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) И СИСТЕМА ПРИВОДА НА ВЕДУЩИЕ КОЛЕСА | 2013 |
|
RU2629820C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ ТРАНСМИССИИ В ТРАНСПОРТНОМ СРЕДСТВЕ С ГИБРИДНЫМ ПРИВОДОМ И ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640432C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2606160C2 |
Предложен способ эксплуатации транспортного средства. Замедляют транспортное средство путем переключения приводной системы в режим свободного хода в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, и условия движения, не указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути следования транспортного средства. Причем условия движения определяют с использованием дальномера. Предложены также способ эксплуатации транспортного средства и система для управления торможением транспортного средства. Достигается усовершенствование торможения транспортного средства. 3 н. и 15 з.п. ф-лы, 4 ил.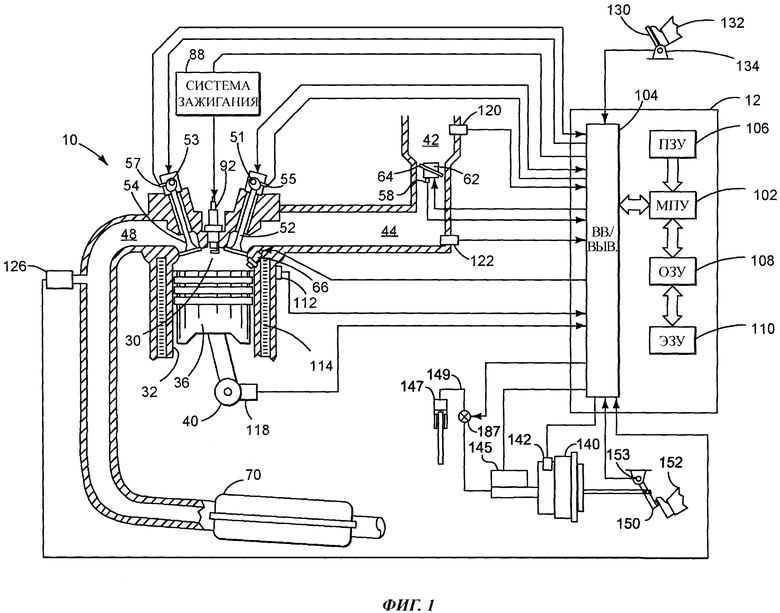
1. Способ эксплуатации транспортного средства, включающий в себя следующие этапы:
замедляют транспортное средство путем переключения приводной системы в режим свободного хода в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, и условия движения, не указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути следования транспортного средства, причем условия движения определяют с использованием дальномера.
2. Способ по п. 1, в котором переключение приводной системы в режим свободного хода производят при помощи односторонней муфты или путем переключения автоматической трансмиссии транспортного средства на нейтральную передачу.
3. Способ по п. 1, в котором дополнительно прекращают сгорание в двигателе приводной системы при работе в режиме свободного хода и прекращают вращение двигателя при работе приводной системы в режиме свободного хода.
4. Способ по п. 1, в котором условия движения включают в себя отсутствие утвержденного индикатора поворота транспортного средства.
5. Способ по п. 1, в котором условия движения определяют по сигналу светофора или дорожному знаку.
6. Способ по п. 1, в котором условия движения определяют по сигналу широковещательной передачи.
7. Способ эксплуатации транспортного средства, включающий в себя следующие
этапы:
замедляют транспортное средство путем переключения приводной системы в режим свободного хода в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, отсутствие нажатия на педаль тормоза транспортного средства и условия движения, не указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути следования транспортного средства; и
замедляют транспортное средство путем прекращения подачи топлива в двигатель транспортного средства при вращении двигателя и заблокированной муфте гидротрансформатора в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, отсутствие нажатия на педаль тормоза транспортного средства и условия движения, указывающие на предполагаемое торможение, производимое водителем, в пределах заранее заданного участка пути следования транспортного средства.
8. Способ по п. 7, в котором замедление транспортного средства путем прекращения подачи топлива в двигатель транспортного средства при вращении двигателя и заблокированной муфте гидротрансформатора дополнительно основано на том, что расстояние между транспортным средством и объектом, находящимся на пути следования транспортного средства, больше первого порогового расстояния.
9. Способ по п. 8, в котором дополнительно увеличивают интенсивность замедления транспортного средства в ответ на то, что расстояние между транспортным средством и объектом, находящимся на пути следования транспортного средства, меньше первого порогового расстояния, причем интенсивность замедления транспортного средства увеличивают путем увеличения электрической нагрузки на генератор транспортного средства.
10. Способ по п. 9, в котором дополнительно увеличивают интенсивность замедления транспортного средства в ответ на то, что расстояние между транспортным средством и объектом, находящимся на пути следования транспортного средства, меньше второго порогового расстояния, причем интенсивность замедления транспортного средства увеличивают путем увеличения выходной мощности компрессора кондиционера.
11. Способ по п. 7, в котором дополнительно замедляют транспортное средство при помощи фрикционных колесных тормозов и прекращения подачи топлива в двигатель транспортного средства при вращении двигателя и заблокированной муфте гидротрансформатора в ответ на требуемый крутящий момент, меньший порогового, скорость транспортного средства, большую пороговой, и нажатие на педаль тормоза.
12. Способ по п. 11, в котором крутящий момент фрикционных колесных тормозов и крутящий момент двигателя складывают для получения крутящего момента, требуемого в соответствии с нажатием педали тормоза.
13. Способ по п. 7, в котором работа в режиме свободного хода включает в себя переключение трансмиссии на нейтральную передачу, причем частоту вращения двигателя приводной системы поддерживают на уровне, превышающем частоту вращения двигателя на холостом ходу.
14. Система для управления торможением транспортного средства, содержащая:
приводную систему, содержащую двигатель;
педаль акселератора;
педаль тормоза;
трансмиссию, соединенную с двигателем, причем трансмиссия содержит муфту гидротрансформатора; и
по меньшей мере один контроллер, содержащий исполнимые инструкции, сохраненные в долговременной памяти, для замыкания муфты гидротрансформатора и перевода приводной системы в режим свободного хода путем переключения трансмиссии на нейтральную передачу в ответ на ожидаемое в соответствии с условиями движения применение водителем тормоза, требуемый крутящий момент, меньший порогового, и скорость транспортного средства, большую пороговой, и дополнительные инструкции для усиления торможения приводной системой в ответ на нажатие на педаль тормоза транспортного средства.
15. Система по п. 14, также содержащая дополнительные инструкции для усиления и ослабления торможения приводной системой путем увеличения и уменьшения выходной мощности компрессора кондиционера в зависимости от условий движения.
16. Система по п. 14, в которой происходит усиление торможения приводной системой в ответ на уменьшение расстояния между транспортным средством и объектом, находящимся на пути следования транспортного средства.
17. Система по п. 14, в которой происходит ослабление торможения приводной системой в ответ на увеличение расстояния между транспортным средством и объектом, находящимся на пути следования транспортного средства.
18. Система по п. 14, также содержащая дополнительные инструкции для прекращения сгорания топлива в двигателе и останова двигателя в ответ на ожидаемое в соответствии с условиями движения применение водителем тормозов, требуемый крутящий момент, меньший порогового, и скорость транспортного средства, большую пороговой.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| US 20080168964 A1, 17.06.2008 | |||
| US 20130296100 A1, 07.11.2013. | |||

