ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение относится к связи и сетям связи, в частности к гибкой детерминированной сети связи, и способу для использования в транспортном средстве, таком как воздушный летательный аппарат, космический летательный аппарат, судно или иное транспортное средство.
УРОВЕНЬ ТЕХНИКИ
[002] Известные в настоящее время воздушные летательные аппараты или иные транспортные средства могут использовать отдельные сети для обеспечения связи на основе систем для управления транспортным средством (VMS) и систем для управления выполнением задания (MMS). Примеры систем VMS могут включать системы, подсистемы или компоненты для управления работой воздушного летательного аппарата или транспортного средства. Системы MMS могут включать системы, подсистемы или компоненты для выполнения задания воздушного летательного аппарата или транспортного средства. Примеры систем, подсистем или компонентов для выполнения задания воздушного летательного аппарата или транспортного средства могут включать в себя, помимо прочего, системы наблюдения, такие как комплексные системы на основе радиолокаторов кругового обзора (ISR), оптические системы наблюдения или системы наблюдения иного типа, системы вооружения, системы радиоэлектронного подавления или создания помех средствам связи и другие системы для выполнения конкретного задания. В воздушном летательном аппарате или космическом летательном аппарате узлы системы VMS связаны друг с другом по гибкой детерминированной сети с использованием протокола Aeronautical Radio, Incorporated (ARINC) 664 или A 664 передачи сообщений или каких-либо других статических, детерминированных протоколов. Узлы системы MMS могут осуществлять связь друг с другом с использованием недетерминированной сети, такой как сеть Ethernet. Для осуществления связи узлов системы VMS и узлов системы MMS друг с другом необходимо использовать мостиковый узел. Использование двух отдельных сетей связи приводит к утяжелению и удорожанию транспортного средства. Указанное может быть особенно важно в таких транспортных средствах, как воздушный летательный аппарат и космический летательный аппарат, в которых дополнительный вес приводит к повышению расхода топлива и эксплуатационных затрат. Две отдельные сети связи также содержат большее количество компонентов, которые могут приводить к отказам, и требуют дополнительных финансовых и временных затрат на обслуживание. Соответственно, существует потребность в создании упрощенных решений, которые могут обеспечить поддержку осуществления связи для систем VMS и MMS и обеспечить осуществление связи между ними, если это необходимо.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[003] В соответствии с одним вариантом реализации изобретения бортовая система транспортного средства может включать в себя систему для управления транспортным средством (VMS) и систему для управления выполнением задания (MMS). Система VMS может включать в себя множество узлов системы VMS для управления работой транспортного средства. Система MMS может включать в себя множество узлов системы MMS для управления оборудованием, связанным с заданием, выполняемым транспортным средством. Указанная система также может включать в себя гибкую детерминированную сеть связи. Гибкая детерминированная сеть связи может быть выполнена с возможностью конфигурирования для обеспечения связи между каждым из узлов системы VMS, между каждым из узлов системы MMS и между узлами системы VMS и узлами системы MMS. Узлы системы VMS выполнены с возможностью осуществления связи с использованием статических, детерминированных сообщений, а узлы системы MMS выполнены с возможностью осуществления связи с использованием динамических, недетерминированных сообщений.
[004] В соответствии еще с одним вариантом реализации изобретения бортовая система транспортного средства может включать в себя систему для управления транспортным средством (VMS) и систему для управления выполнением задания (MMS). Система VMS может включать в себя множество узлов системы VMS для управления работой транспортного средства, а система MMS может включать в себя множество узлов системы MMS для управления оборудованием, связанным с заданием, выполняемым транспортным средством. На каждом узле системы VMS и каждом узле системы MMS может быть запущено приложение. С каждым приложением может быть связан уровень сервиса распределения данных для обеспечения связи между приложениями. Уровень абстракции может быть выполнен с возможностью сокрытия реконфигурации уровня сервиса распределения данных от приложения для использования детерминированного протокола передачи данных.
[005] В соответствии еще с одним вариантом реализации изобретения способ передачи сообщений может включать в себя прием сообщения и проверку принятого сообщения по отношению к текущей конфигурации гибкой детерминированной сети связи. Сообщение также может включать в себя передачу принятого сообщения по гибкой детерминированной сети связи в ответ на соответствие принятого сообщения текущей конфигурации, и воздержание от передачи принятого сообщения по гибкой детерминированной сети связи при несоответствии принятого сообщения текущей конфигурации.
[006] В соответствии с одним вариантом реализации изобретения и любым из предыдущих вариантов реализации, гибкая детерминированная сеть может включать в себя оконечную систему, связанную с каждым узлом сети VMS, и оконечную систему, связанную с каждым узлом системы MMS. Гибкая детерминированная сеть также может включать в себя коммутационный механизм, выполненный с возможностью обеспечения соединения оконечных систем.
[007] В соответствии с одним вариантом реализации изобретения и любым из предыдущих вариантов реализации, гибкая детерминированная сеть связи может включать в себя набор статических виртуальных каналов и набор динамических виртуальных каналов. Гибкая детерминированная сеть связи может быть выполнена с возможностью конфигурирования для передачи статических, детерминированных сообщений с использованием статических виртуальных каналов и для передачи динамических, недетерминированных сообщений с использованием набора динамических виртуальных каналов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[008] Последующее подробное описание вариантов реализации настоящего изобретения выполнено со ссылкой на сопроводительные фигуры чертежей, которые иллюстрируют конкретные варианты реализации настоящего раскрытия. Другие варианты его реализации, имеющие отличающиеся конструкции и операции, не отходят от сущности и объема настоящего изобретения.
[009] На ФИГ. 1 представлена структурная блок-схема транспортного средства, включающего в себя примеры систем VMS, MMS и гибкой детерминированной сети связи, связанной с системами VMS и MMS, в соответствии с одним вариантом реализации изобретения.
[0010] На ФИГ. 2 представлена структурная блок-схема примера слабодетерминированной сети, включающей в себя множество издательских приложений и одно абонентское приложение, в соответствии с одним вариантом реализации настоящего изобретения.
[0011] На ФИГ. 3 представлена структурная блок-схема примера слабодетерминированной сети, включающей в себя одно издательское приложение и одно абонентское приложение с каналами дуплексной связи, в соответствии с одним вариантом реализации настоящего изобретения.
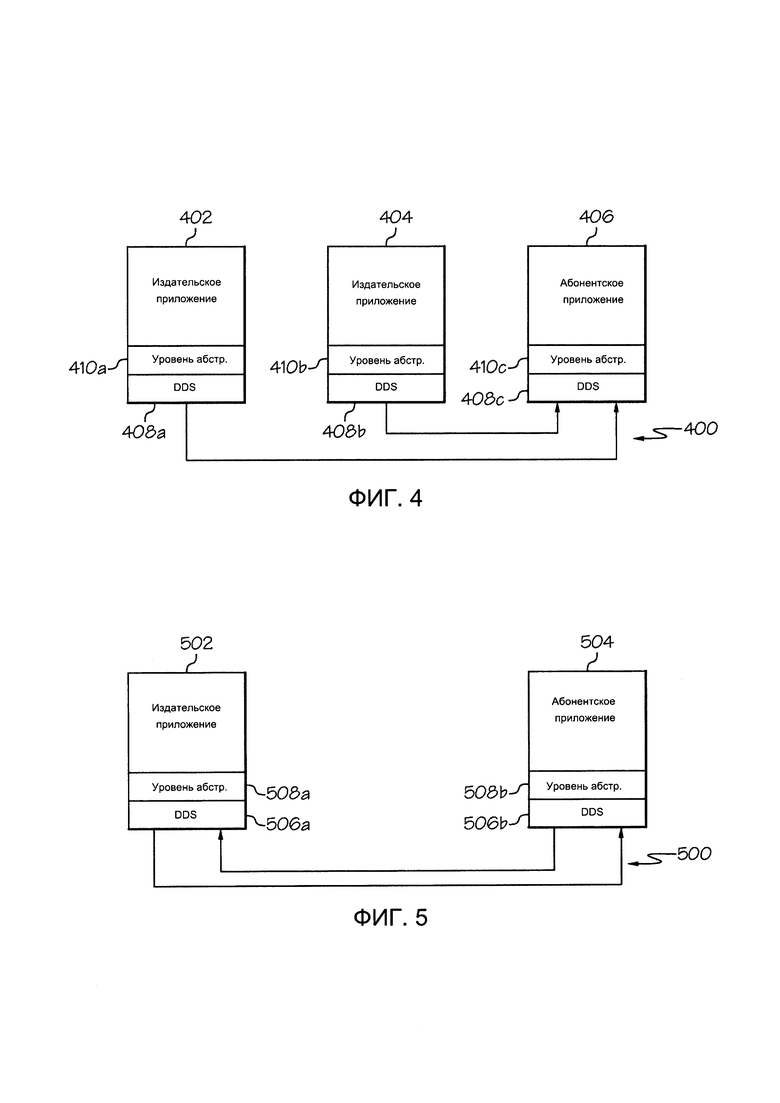
[0012] На ФИГ. 4 представлена структурная блок-схема примера высокодетерминированной сети, включающей в себя множество издательских приложений и одно абонентское приложение, в соответствии с одним вариантом реализации настоящего изобретения.
[0013] На ФИГ. 5 представлена структурная блок-схема примера высокодетерминированной сети, включающей в себя одно издательское приложение и одно абонентское приложение с каналами дуплексной связи, в соответствии с одним вариантом реализации настоящего изобретения.
[0014] На ФИГ. 6 представлена блок-схема примера способа передачи сообщений посредством гибкой детерминированной сети связи, в соответствии с одним вариантом реализации настоящего изобретения.
[0015] На ФИГ. 7 представлена блок-схема примера способа передачи сообщений посредством гибкой детерминированной сети связи в соответствии еще с одним вариантом реализации настоящего изобретения.
[0016] На ФИГ. 8 представлена блок-схема примера способа передачи сообщений посредством гибкой детерминированной сети связи, в соответствии еще с одним вариантом реализации настоящего изобретения.
[0017] На ФИГ. 9 представлена блок-схема примера способа передачи сообщений, отформатированных по протоколу передачи данных недетерминированного типа по детерминированной сети связи или гибкой детерминированной сети связи, в соответствии с одним вариантом реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0018] Последующее подробное описание вариантов реализации настоящего изобретения выполнено со ссылкой на сопроводительные фигуры чертежей, которые иллюстрируют конкретные варианты реализации настоящего раскрытия. Другие варианты его реализации, имеющие отличающиеся конструкции и операции, не отходят от сущности и объема настоящего изобретения. Одинаковые ссылочные номера могут относиться к одному и тому же элементу или компоненту на различных фигурах чертежей.
[0019] На ФИГ. 1 представлена структурная блок-схема транспортного средства 100, включающего в себя пример системы 102 для управления транспортным средством (VMS), системы 104 для управления выполнением задания (MMS) и гибкой детерминированной сети 106 связи, связанной с системой VMS 102 и системой MMS 104, в соответствии с одним вариантом реализации изобретения. Транспортное средство 100 может представлять собой воздушный летательный аппарат, космический летательный аппарат, водное судно, судно или наземное транспортное средство. Система VMS 102 может включать в себя дистанционный концентратор 108 данных и множество узлов 110а-110n системы VMS. Дистанционный концентратор 108 данных может включать в себя процессор 112 и оконечную систему 114. Одно или более приложений 116 могут быть запущены на процессоре 112. Указанные одно или более приложений 116 могут быть сконфигурированы для управления работой дистанционного концентратора 108 данных и для приема и обработки сигналов от множества датчиков 117, связанных с различными системами, подсистемами или компонентами для работы и управления транспортным средством и обеспечения его работы. Указанные одно или более приложений 116 могут также быть сконфигурированы для управления работой исполнительных механизмов 118 или других компонентов транспортного средства 100 для управления эксплуатацией и маневрированием транспортного средства 100. Например, датчики 117 и исполнительные механизмы 118 могут быть связаны с компонентами воздушного летательного аппарата, которые могут включать в себя, помимо прочего, органы управления полетом или поверхности управления полетом, шасси и его компоненты, системы управления окружающей средой, электрические, пневматические и гидравлические системы, системы осуществления связи и другие системы или подсистемы для управления эксплуатацией и маневрированием воздушного летательного аппарата, когда он находится в воздухе или на земле.
[0020] Оконечная система 114 может соединять дистанционный концентратор 108 данных с гибкой детерминированной сетью 106. Хотя оконечная система 114 может быть показана на ФИГ. 1 как связанная с дистанционным концентратором 108 данных, оконечная система 114 может фактически рассматриваться как часть гибкой детерминированной сети 106 и может быть реконфигурирована в связи с гибкой детерминированной сетью 106, как описано в настоящем документе. Оконечная система 114 может включать в себя таблицу 120 маршрутизации для обеспечения маршрутизации сообщений к другим компонентам или системам по гибкой детерминированной сети 106. Таблица 120 маршрутизации может включать в себя статическую часть 122 и динамическую часть 124. Статическая часть 122 может быть сконфигурирована для обеспечения маршрутизации сообщений к узлам 110а-110n системы VMS или другим компонентам по гибкой детерминированной сети 106, которые осуществляют связь с использованием сообщений статического, детерминированного типа. Статические детерминированные сообщения могут иметь предварительно определенную пропускную способность или длину. Статические детерминированные сообщения также могут быть переданы в определенные моменты времени или временные интервалы и/или на конкретных частотах или при определенных условиях или состояниях. Динамическая часть 124 таблицы 120 маршрутизации может быть сконфигурирована для обеспечения маршрутизации сообщений к компонентам системы MMS 104 или другим компонентам по гибкой детерминированной сети 106, которые могут осуществлять связь с использованием сообщений динамического, недетерминированного типа. Динамические недетерминированные сообщения не обязательно имеют заданную пропускную способность или длину. Динамические недетерминированные сообщения могут быть отправлены в любой момент времени и могут иметь любую длину исходя из потребностей системы MMS 204 и оборудования или компонентов для выполнения транспортным средством 100 задания или задачи. Осуществление доставки сообщения может зависеть от конфигурации гибкой детерминированной сети 106 в тот момент времени, когда осуществляется отправка сообщения. Как более подробно описано в настоящем документе, оконечная система 114 может быть реконфигурирована с использованием таблицы 120 маршрутизации, включающей в себя статическую часть 122 для передачи и приема сообщений статического, детерминированного типа от узлов 110а-110n системы VMS по гибкой детерминированной сети 106, и с использованием динамической части 124 для передачи и приема сообщений динамического, недетерминированного типа от компонентов системы MMS 104. Статическая часть 122 таблицы маршрутизации конфигурируется перед подачей питания на транспортное средство 100 и не может быть реконфигурирована, поэтому она называется статической частью 122.
[0021] Каждый узел 110а-110n системы VMS может включать в себя процессор 126 и одно или более приложений 128, запущенных на процессоре 126. Каждый узел 110а-110n системы VMS может быть связан с одной или более системами 130-132, подсистемами или компонентами транспортного средства 100, которые управляют эксплуатацией и маневрированием транспортного средства 100. Примеры систем 130-132, подсистем или компонентов транспортного средства 100, если транспортное 100 средство представляет собой воздушный летательный аппарат, могут включать, помимо прочего, органы управления полетом, шасси, системы управления окружающей средой в салоне и кабине, электрические, пневматические и гидравлические системы, системы связи, системы навигации и другие системы или подсистемы для управления эксплуатацией и маневрированием воздушного летательного аппарата, когда он находится в воздухе или на земле. Приложения 128, запущенные на процессоре 126 каждого узла 110а-110n системы VMS, могут быть сконфигурированы для управления работой одной или более связанных с ними систем 130-132, подсистем или компонентов. Процессор 126 может быть аналогичным процессору 112 дистанционного концентратора 208 данных или может представлять собой уникальное устройство, такое как микропроцессор или иное обрабатывающее устройство, запрограммированное для выполнения конкретных функций для управления системой, подсистемой или компонентом транспортного средства.
[0022] Каждый узел 110а-110n системы VMS также может включать в себя оконечную систему 134 для соединения узла 110а-110n системы VMS с гибкой детерминированной сетью 106 для передачи и приема сообщений. Хотя оконечная система 134 показана как связанная с узлом 110а системы VMS, оконечная система 134 может фактически рассматриваться как часть гибкой детерминированной сети 106 и может быть реконфигурирована как часть гибкой детерминированной сети, как описано в настоящем документе. Оконечная система 134 может быть аналогична оконечной системе 114 дистанционного концентратора данных. Оконечная система 130 также может включать в себя таблицу 136 маршрутизации, которая может включать в себя статическую часть 138 и динамическую часть 140. Как более подробно описано ниже, оконечная система 134 может быть реконфигурирована с использованием таблицы 136 маршрутизации, включающей в себя статическую часть 138 для передачи и приема статических, детерминированных сообщений по гибкой детерминированной сети 106, и с использованием динамической части 140 таблицы 136 маршрутизации для передачи и приема динамических недетерминированных сообщений по гибкой детерминированной сети 106.
[0023] В воздушном летательном аппарате узлы 110а-110n системы VMS и дистанционный концентратор 108 данных могут осуществлять связь друг с другом по гибкой детерминированной сети 106 с использованием протокола Aeronautical Radio, Incorporated (ARINC) 664 или A 664 передачи сообщений, который является статическим детерминированным протоколом.
[0024] Система 104 MMS может включать в себя сенсорный узел 142 выполнения задания и множество узлов 144а-144n системы MMS. Сенсорный узел 142 выполнения задания может быть соединен с множеством датчиков 146 и множеством исполнительных механизмов 148 или другим оборудованием. Сенсорный узел 142 выполнения задания может управлять работой исполнительных механизмов 148 в ответ на сигналы от датчиков 146 и другую информацию, которую сенсорный узел 142 выполнения задания может принимать от других компонентов. Каждый из датчиков 146 и исполнительных механизмов 148 может быть связан с системой, подсистемой или компонентом для выполнения задания или задачи транспортного средства 100. Примеры систем, подсистем и компонентов для выполнения задания транспортным средством 100 могут включать в себя, помимо прочего, системы наблюдения, такие как комплексные системы на основе радиолокаторов кругового обзора (ISR), оптические системы наблюдения или системы наблюдения другого типа, системы вооружения, системы радиоэлектронного подавления или создания помех средствам связи и другие системы для выполнения конкретного задания. Узлы 144а-144n системы MMS могут осуществлять связь друг с другом с использованием протокола сервиса распределения данных (Data Distribution Service, DDS), который является динамическим, недетерминированным протоколом. Функционирование или технические характеристики систем для выполнения задания могут не быть настолько важны, как технические характеристики систем транспортного средства, которые могут быть важны для предотвращения повреждения или утраты транспортного средства 100. Следовательно, связь VMS 102 может иметь приоритет над связью MMS 104 в отношении конфигурирования гибкой детерминированной сети 106 и оконечных систем 114, 134, 154 и 170. Хотя оконечные системы 114, 134, 154 и 170 могут быть показаны как связанные с соответствующими узлами 108, 110а-110n, 142 и 144а-144n или могут быть их частью, оконечные системы также могут рассматриваться как часть гибкой детерминированной сети 106.
[0025] Сенсорный узел 142 выполнения задания может включать в себя процессор 150. Одно или более приложений 152 могут быть запущены на процессоре 150. Указанные одно или более приложений 152 могут быть выполнены так, чтобы заставлять процессор 150 управлять работой сенсорного узла 142 выполнения задания и исполнительных механизмов 148 или другого оборудования в ответ на сигналы от датчиков 146 для выполнения заданий транспортным средством 100.
[0026] Сенсорный узел 142 выполнения задания также может включать в себя оконечную систему 154. Оконечная система 154 может соединять сенсорный узел 142 выполнения задания с гибкой детерминированной сетью 106. Хотя оконечная система 154 может быть показана на ФИГ. 1 как связанная с сенсорным узлом 142 выполнения задания, оконечная система 154 может фактически рассматриваться как часть гибкой детерминированной сети 106. Оконечная система 154 может быть аналогична оконечной системе 114 дистанционного концентратора 108 данных и оконечной системе 134 каждого из узлов 110а-110n системы VMS. Соответственно, оконечная система 154 может включать в себя таблицу 156 маршрутизации для обеспечения маршрутизации сообщений к другим компонентам или системам по гибкой детерминированной сети 106. Таблица 156 маршрутизации может включать в себя статическую часть 158 и динамическую часть 160. Статическая часть 158 может быть сконфигурирована для обеспечения маршрутизации сообщений к узлам 110а-110n системы VMS или другим компонентам по гибкой детерминированной сети 106, которые осуществляют связь с использованием сообщений статического, детерминированного типа. Динамическая часть 160 таблицы 156 маршрутизации может быть сконфигурирована для обеспечения маршрутизации сообщений к узлам 144а-144n системы MMS или другим компонентам по гибкой детерминированной сети 106, которые могут осуществлять связь с использованием сообщений динамического, недетерминированного типа. Как более подробно описано в настоящем документе, оконечная система 154 может быть реконфигурирована с использованием таблицы 156 маршрутизации, включающей в себя статическую часть 158 для передачи и приема сообщений статического, детерминированного типа от узлов 110а-110n системы VMS и других компонентов, которые используют схожий детерминированный протокол передачи данных по гибкой детерминированной сети 106. Динамическая часть 160 может быть использована для передачи и приема сообщений динамического, недетерминированного типа от узлов 144а-144n системы MMS и других компонентов, которые используют схожий недетерминированный протокол передачи данных по гибкой детерминированной сети 106.
[0027] Каждый узел 144а-144n системы MMS может включать в себя процессор 162 и одно или более приложений 164, запущенных на процессоре 126. Каждый узел 144а-144n системы MMS может быть связан с одной или более системами 166-168, подсистемами или компонентами, ориентированными на выполнение определенных заданий для выполнения транспортным средством 100 одного задания или одной задачи. Как описано ранее, примеры систем 166-168, подсистем или компонентов для выполнения заданий транспортным средством 100 могут включать в себя, без ограничения, системы наблюдения, такие как комплексные системы на основе радиолокаторов кругового обзора (ISR), оптические системы наблюдения или системы наблюдения другого типа, системы вооружения, системы радиоэлектронного подавления или создания помех средствам связи и другие системы для выполнения конкретных заданий. Приложения 164, запущенные на процессоре 162 каждого узла 144а-144n системы MMS, могут быть сконфигурированы для управления работой одной или более связанных систем, подсистем или компонентов, ориентированных на выполнение определенных заданий. Процессор 162 может быть аналогичным процессорам 112 и 126 дистанционного концентратора 108 данных и узлам 110а-110n системы VMS или может представлять собой уникальное устройство, такое как микропроцессор или иное обрабатывающее устройство, запрограммированное для выполнения конкретных функций для управления системой, подсистемой или компонентом, ориентированной или ориентированным на выполнение определенных заданий.
[0028] Каждый узел 144а-144n системы MMS также может включать в себя оконечную систему 170 для соединения узла 144а-144n системы MMS с гибкой детерминированной сетью 206 для передачи и приема сообщений. Хотя оконечная система 170 показана на примере ФИГ. 1 как связанная с узлом 144а системы MMS, оконечная система 170 фактически может рассматриваться как часть гибкой детерминированной сети 106 и может быть реконфигурирована вместе с ней. Оконечная система 170 может быть аналогична оконечной системе 154 сенсорного узла 142 выполнения задания и оконечным системам 114 и 134. Оконечная система 170 также может включать в себя таблицу 172 маршрутизации. Таблица 172 маршрутизации может включать в себя статическую часть 174 и динамическую часть 176. Как более подробно описано ниже, оконечная система 170 может быть реконфигурирована с использованием таблицы 172 маршрутизации, включающей в себя статическую часть 174 для передачи и приема статических, детерминированных сообщений по гибкой детерминированной сети 106. Динамическая часть 176 таблицы 136 маршрутизации может быть использована для конфигурирования оконечной системы 170 для передачи и приема динамических, недетерминированных сообщений по гибкой детерминированной сети 106. Гибкая детерминированная сеть 106 и оконечные системы 114 также могут быть реконфигурированы под управлением любого из приложений 110, 128, 152 и 164.
[0029] Гибкая детерминированная сеть 106 может включать в себя контроллер 180. Контроллер 180 может быть процессором или другим электронным устройством для управления работой гибкой детерминированной сети 106 и для конфигурирования или реконфигурации по меньшей мере участков гибкой детерминированной сети 106, как более подробно описано в настоящем документе, для передачи статических, детерминированных сообщений и динамических, недетерминированных сообщений. Контроллер 180 может быть выполнен с возможностью выполнения по меньшей мере некоторых функций или операций, сходных с теми, которые описаны на примере способов 600-800 по ФИГ. 6-8. Любой из процессоров 112, 126, 150 и 162 на любом из узлов 108, 110а-110n, 142, 144а-144n может также выполнять функцию или функции контроллера 180.
[0030] Гибкая детерминированная сеть 106 также может включать в себя коммутационный механизм 182. Коммутационный механизм 182 может включать в себя множество коммутаторов для обеспечения маршрутизации сообщений между узлами 108, 110а-110n, 142 и 144а-144n. Коммутационный механизм 182 также может включать в себя или может создавать один или более виртуальных каналов 184. Виртуальный канал 184 может быть установлен между конкретной парой узлов 108, 110а-110n, 142, 144а-144n через коммутационный механизм 182 для обеспечения связи между указанной конкретной парой узлов. Определенная пара узлов может представлять собой любую комбинацию узлов 110а-110n системы VMS и узлов 144а-144n системы MMS, сенсорного узла 142 выполнения задания и дистанционного концентратора 108 данных. Гибкая детерминированная сеть 106 или коммутационный механизм 182 может включать в себя или может создавать набор статических виртуальных каналов 184а и набор динамических виртуальных каналов 184b. Соответственно, гибкая детерминированная сеть 106 может быть выполнена с возможностью передачи статических, детерминированных сообщений с использованием статических виртуальных каналов 184а, а также может быть выполнена с возможностью передачи динамических, недетерминированных сообщений с использованием набора динамических виртуальных каналов 184b. Виртуальные каналы 184 могут соответствовать временным интервалам, которые могут быть выполнены и/или назначены для передачи конкретного типа сообщения. Гибкая детерминированная сеть 106 может быть сконфигурирована для обеспечения связи между соответствующим одним из узлов 110а-110n системы VMS и соответствующим одним из узлов 144а-144n системы MMS или между любой комбинацией узлов с использованием по меньшей мере одного из таких наборов, как набор статических виртуальных каналов 184а и набор динамических виртуальных каналов 184b исходя из типа отправленного сообщения.
[0031] Контроллер 180 может определять тип сообщения, полученного гибкой детерминированной сетью 106, и подтверждать, что сеть 106 настроена должным образом исходя из типа сообщения, то есть статического, детерминированного сообщения или динамического, недетерминированного сообщения. Контроллер 180 может реконфигурировать гибкую детерминированную сеть 206 для передачи указанного сообщения исходя из конкретного типа. Статический виртуальный канал 184а может быть обеспечен или установлен для передачи статического, детерминированного сообщения, динамический канал 184b может быть обеспечен или установлен для передачи динамического, недетерминированного сообщения. Статический виртуальный канал 184а будет иметь предварительно определенную пропускную способность, чтобы соответствовать протоколу статических, детерминированных сообщений. Динамический виртуальный канал 184b может иметь переменную пропускную способность, которая соответствует пропускной способности передаваемого динамического, недетерминированного сообщения. Динамический виртуальный канал 184b может быть создан или установлен без влияния на статический виртуальный канал или каналы.
[0032] После установки конфигурации сети (включающей в себя статическую и динамическую части) все сообщения обрабатываются одинаково. Нет необходимости в "определении" типа сообщения. Единственное различие между двумя указанными типами сообщений состоит в том, что один тип сообщений является фиксированными (всегда одинаковые сообщения, размеры, частоты и т.д.), а для другого типа сообщений используются различные наборы сообщений (различные сообщения, размеры и/или частоты и т.д.) в различные моменты времени. Первый тип сообщений использует статическую часть этой конфигурации, а второй тип сообщений использует динамическую часть этой конфигурации. Выражение "реконфигурация" относится к изменению динамической части конфигурации с воздействием на коммутаторы 182, оконечные системы 114, 134, 154, 170 и уровни 410а-410с и 508а-508b абстракции, как описано в отношении ФИГ. 4 и 5.
[0033] Оконечные системы 114, 134, 154 и 170 могут быть реконфигурированы сходным образом с тем, как описано выше, с использованием таблиц 120, 136, 156 и 172 маршрутизации исходя из реконфигурации гибкой детерминированной сети 106 для передачи трафика статических, детерминированных сообщений или трафика динамических, недетерминированных сообщений. В соответствии с одним вариантом реализации изобретения оконечная система 114 и оконечные системы 170 определенных узлов 144а-144n системы MMS и оконечные системы 134 определенных узлов 110а-110n системы VMS могут быть выборочно реконфигурированы для обеспечения связи друг с другом исходя из трафика сообщений конкретного типа, статического или динамического, и могут быть созданы или установлены соответствующие виртуальные каналы 184, статические или динамические. Сходным образом, оконечная система 114 дистанционного концентратора 108 данных и оконечная система 154 сенсорного узла 142 выполнения задания могут быть реконфигурированы исходя из конкретного набора сообщений. Инструкции могут быть переданы контроллером 180 в оконечные системы или реализованы оконечными системами 114, 134, 154 и 170 конкретной конфигурации или с изменением режима для передачи статических, детерминированных сообщений или динамических, недетерминированных сообщений. Еще в одном варианте реализации гибкая детерминированная сеть 106 может быть сконфигурирована или реконфигурирована для передачи конкретного набора сообщений, и все оконечные системы 114, 134, 154 и 170 могут быть сконфигурированы или реконфигурированы для передачи одного и того же набора сообщений.
[0034] Работа или технические характеристики систем для выполнения задания могут быть не настолько важны, как технические характеристики систем транспортного средства, которые могут быть важны для предотвращения повреждения или утраты транспортного средства 100. Следовательно, связь или сообщения VMS 102 могут иметь приоритет над связью или сообщениями MMS 104 в отношении конфигурирования гибкой детерминированной сети 106 и оконечных систем 114, 134, 154, 170. Соответственно, динамическое, недетерминированное сообщение не может быть передано, или сеть 106 и оконечные системы 114, 134, 154 и 170 не могут быть реконфигурированы для передачи динамического, недетерминированного сообщения при условии недостаточности имеющейся пропускной способности сети 106 для указанного сообщения вследствие трафика статических, детерминированных сообщений. Сеть 106 и оконечные системы 114, 134, 154 и 170 могут быть реконфигурированы для передачи трафика динамических, недетерминированных сообщений при условии достаточности доступной пропускной способности гибкой детерминированной сети, как определено контроллером 180 или одним из приложений 110, 128, 152 или 164, работающим на одном из узлов.
[0035] Устройство 188 управления режимом выполнения задания может обнаруживать ("реактивную") реконфигурацию гибкой детерминированной сети 106, которая может быть определена как изменение режима, или устройство 188 управления режимом выполнения задания может инициировать изменение режима и вызывать, таким образом, ("проактивную") реконфигурацию. Устройство 188 управления режимом выполнения задания может быть размещено на одном или более узлах 144а-144n системы MMS. Устройство 188 управления режимом выполнения задания может передавать уведомление на узлы 144а-144n системы MMS или приложения 164 и сенсорный узел 142 выполнения задания об изменении режима или реконфигурации с переключением в новый режим или конфигурацию для передачи трафика статических, детерминированных сообщений или трафика динамических, недетерминированных сообщений исходя из конфигурации сети 106.
[0036] В соответствии с одним вариантом реализации изобретения одно из приложений 110, 128, 152 или 162 может нуждаться в изменении режима, и указанное приложение может управлять реконфигурацией гибкой детерминированной сети 106 или по меньшей мере подходящими участками гибкой детерминированной сети 106 для передачи сообщений или трафика конкретного типа. Пример способа приложения, выдающего запрос на изменение потребностей в отношении связи или изменение режима, более подробно описан со ссылкой на ФИГ. 7.
[0037] На ФИГ. 2 представлена структурная блок-схема слабодетерминированной сети 200, включающей в себя множество издательских приложений 202 и 204 и одно абонентское приложение 206, в соответствии с одним вариантом реализации настоящего изобретения. Слабодетерминированная сеть 200 может быть сетью Ethernet или аналогичной с ней сетью. Приложения 202, 204 и 206 могут осуществлять связь с использованием сервиса распределения данных (DDS) или сходного слабодетерминированного или недетерминированного протокола. Каждое приложение 202, 204 и 206 может включать в себя уровень 208а-208с. Слабодетерминированная сеть 200 может обеспечивать связь только в одном направлении от издательских приложений 202 и 204 к абонентским приложениям 206. Эти признаки слабодетерминированной сети 200 не совместимы с высокодетерминированной сетью, такой как сеть, необходимая для связи между узлами 110а-110n системы VMS, описанной со ссылкой на ФИГ. 1.
[0038] На ФИГ. 3 представлена структурная блок-схема примера слабодетерминированной сети 300, включающей в себя одно издательское приложение 302 и одно абонентское приложение 304 с дуплексной связью, в соответствии с одним вариантом реализации настоящего изобретения. Дуплексная связь может быть обусловлена такими признаками, как надежное качество обслуживания, которое требует подтверждений приема для каждого сообщения от абонентов. Приложения 302 и 304 также связаны с использованием сервиса DDS, и каждое из них может включать в себя уровень 306а и 306b DDS. Хотя эта сеть может обеспечить каналы дуплексной связи, сеть 300 может быть не пригодной для статических, детерминированных сообщений или трафика, например для связи между узлами 110а-110n сети VMS.
[0039] На ФИГ. 4 представлена структурная блок-схема примера высокодетерминированной сети 400, включающей в себя множество издательских приложений 402 и 404 и одно абонентское приложение 406, в соответствии с одним вариантом реализации настоящего изобретения. Приложения 402, 404 и 406 могут также осуществлять связь с использованием DDS, и каждое из них может включать в себя уровень 408а-408с DDS. В соответствии с одним вариантом реализации изобретения, уровень 410а-410с абстракции может быть предоставлен в связи с каждым уровнем 408а-408с DDS, чтобы скрыть изменения в реализации уровня 408а-408с DDS для передачи статических, детерминированных сообщений и динамических, недетерминированных сообщений. Приведенная в качестве примера сеть 400 обеспечивает передачу данных в одном направлении от каждого из издательских приложений 402 и 404 к абонентскому приложению 406. В соответствии с одним вариантом реализации изобретения, приложения, аналогичные приложениям 402, 404 и 406, с уровнем 408а-408с DDS и связанным уровнем 410а-410с абстракции, могут быть использованы для приложений 110, 128, 152 и 164 по ФИГ. 1. Приложения, аналогичные приложениям 402, 404 и 406, могут быть использованы с гибкой детерминированной сетью 106 по ФИГ. 1 или могут быть использованы с гибкой детерминированной сетью, такой как ARINC 664 или А664, сетью на основе синхронизуемых по времени пакетов (ТТР) или аналогичной детерминированной сетью.
[0040] На ФИГ. 5 представлена структурная блок-схема примера высокодетерминированной сети 500, включающей в себя одно издательское приложение 502 и одно абонентское приложение 504 с каналами дуплексной связи, в соответствии с одним вариантом реализации настоящего изобретения. Каждое приложение 502 и 504 может включать в себя уровень 506а и 506b DDS и связанный уровень 508а и 508b абстракции. Высокодетерминированная сеть 500 реализует каналы дуплексной связи в качестве двух отдельных каналов симплексной связи, что обеспечивает возможность подтверждения приема и может обеспечить более надежное качество услуги по сравнению с сетью 400. Приложения, аналогичные приложениям 502 и 504 с уровнем 506а и 506b DDS и уровнем 508а и 508b абстракции, также могут быть использованы для приложений по ФИГ. 1 и могут включать в себя каналы дуплексной связи по гибкой детерминированной сети, такой как сеть ARINC 664, сеть ТТР, или аналогичной детерминированной сети или гибкой детерминированной сети 106, как описано со ссылкой на ФИГ. 1.
[0041] С использованием этого протокола уровень 410 и 508 абстракции скрывает все изменения в реализации для уровней 408 и 506 DDS от приложения 402-406, 502 и 504. Изменения осуществления обусловлены использованием детерминированного протокола передачи данных. Например, множество издательских приложений реализуются по протоколу ARINC 664 с использованием множества виртуальных каналов или линий (по одному на издателя). Указанное может быть скрыто от приложения посредством использования уровня 410 и 508 абстракции. Сходным образом, сообщения, требующие подтверждений приема, и соответствующие подтверждения приема были ранее направлены по тому же каналу. С использованием протокола ARINC 664 подтверждения приема отправлялись бы по отдельным виртуальным каналам или линиям. Эта деталь реализации также может быть скрыта от приложений с использованием уровня 410 и 508 абстракции таких сообщений.
[0042] Решение, описанное со ссылкой на ФИГ. 4 и 5, предназначено для сопоставления тем (topic) сервиса DDS со слотами связи (такими как виртуальные каналы или линии А664 или синхронизуемые по времени пакеты в ТТР) и для создания дополнительных возможностей, которые обеспечивают необходимую автоматическую работу с данными, так что приложения, запущенные на верхнем уровне, могут быть инвариантными к нижележащему механизму связи. Новые возможности могут быть интегрированы в уровень промежуточного программного обеспечения слоя сервиса DDS или быть частью отдельного уровня поверх сервиса DDS, например, на уровне абстракции. Темы могут рассматриваться как слоты связи с одним издателем и множеством абонентов. Эта возможность обеспечивается для считывания из множества слотов связи для имитации поведения множества издателей. Эта возможность также обеспечивается для использования отдельных слотов связи для имитации дуплексной связи в отношении таких признаков, как подтверждение приема, живучесть абонентов и запрашивание данных предыстории. Возможности, которые не подходят для детерминированной среды (такие как создание новых тем в процессе выполнения), могут быть отключены, и при вызове этих функций могут быть выданы стандартные сообщения об ошибке. Могут использоваться инструментальные средства разработки, которые могут обрабатывать документы, содержащие все передачи данных в системе вместе с характеристиками качества их обслуживания, и могут автоматически генерировать полный набор слотов связи для этих сообщений. Эти инструментальные средства могут автоматически определять параметры слотов связи, такие как размер данных, периодичность и т.д. Эти инструментальные средства могут при необходимости выполнять группировку связей или выполнять другие оптимизаций в отношении сгенерированных слотов связи.
[0043] На ФИГ. 6 представлена блок-схема примера способа 600 передачи сообщений посредством гибкой детерминированной сети связи в соответствии с одним вариантом реализации настоящего изобретения. По меньшей мере части способа 600 могут быть реализованы гибкой детерминированной сетью 106 и/или приложениями 110, 128, 152 и 164 по ФИГ. 1.
[0044] В блоке 602 сообщение может быть принято гибкой детерминированной сетью. Указанное сообщение может быть статическим, детерминированным сообщением или динамическим, недетерминированным сообщением. Гибкая детерминированная сеть может быть сконфигурирована для определения того, какой трафик сообщений может быть статически конфигурируемым, т.е. не может быть изменен во время передачи, и какой трафик сообщений может быть динамически конфигурируемым, т.е. может быть изменен во время передачи. Статические детерминированные сообщения соответствуют статически конфигурируемому трафику сообщений, а динамические недетерминированные соответствуют динамически конфигурируемому трафику сообщений.
[0045] В блоке 604 сообщение может быть проверено по отношению к текущей конфигурации гибкой детерминированной сети. Например, гибкая детерминированная сеть может иметь текущую конфигурацию или частичную конфигурацию, обеспечивающую возможность передачи статически конфигурируемого трафика сообщений, или указанная сеть может иметь текущую конфигурацию или частичную конфигурацию, обеспечивающую возможность передачи динамически конфигурируемого трафика сообщений. В блоке 606, если сообщение соответствует текущей конфигурации гибкой детерминированной сети, способ 600 может переходить к блоку 608, и сообщение может быть передано через гибкую детерминированную сеть.
[0046] Если сообщение не соответствует текущей конфигурации гибкой детерминированной сети в блоке 606, способ 600 может переходить далее к блоку 610. В блоке 610 сеть или сетевой контроллер, такой как контроллер 180 по ФИГ. 1, может воздерживаться от передачи сообщения. В одном варианте реализации изобретения, посредством сети или сетевого контроллера узлу или приложению может быть передан ответ о том, что сообщение не было передано или что сеть не имеет конфигурации, обеспечивающей возможность передачи указанного сообщения. Еще в одном варианте реализации узел или приложение, запущенное на узле, может определить, что передача сообщения не удалась или что оно не было передано. Например, узел системы MMS может передавать динамическое недетерминированное сообщение для обеспечения связи по гибкой детерминированной сети. Сеть или сетевой контроллер может определить, что сеть не сконфигурирована или не имеет в настоящий момент пропускной способности, достаточной для передачи динамически конфигурируемого сообщения. Посредством сети или сетевого контроллера узлу системы MMS может быть передан ответ о том, что сеть не настроена или не имеет пропускной способности, достаточной для передачи указанного сообщения. Еще в одном варианте реализации узел системы MMS или приложение может определить, что передача сообщения не удалась или что оно не было передано.
[0047] На ФИГ. 7 представлена блок-схема примера способа 700 передачи сообщений посредством гибкой детерминированной сети связи в соответствии еще с одним вариантом реализации настоящего изобретения. В блоке 702 может быть получен запрос от узла или приложения, запущенного на узле, на изменение потребностей в отношении связи гибкой детерминированной сети. Например, узел системы MMS или приложение может выдать запрос на передачу через указанную сеть сообщения с большей пропускной способностью через указанную сеть. После приема ответа, что передача сообщения не удалась или что оно не было передано, или после определения того, что передача сообщения не удалась, узел системы MMS может послать запрос в сеть или сетевой контроллер о том, что требуется большая пропускная способность или другая потребность в отношении связи.
[0048] В блоке 704 может быть выполнено определение возможности одобрения запроса и изменения конфигурации по меньшей мере части гибкой детерминированной сети для соответствия необходимой большей пропускной способности или запрошенной потребности в отношении связи. Определение возможности одобрения запроса на изменение потребностей в отношении связи может включать в себя, помимо прочего, доступную пропускную способность гибкой детерминированной сети исходя из какой-либо иной связи между узлами системы VMS по сети, доступности пропускной способности сети, соответствующей пропускной способности запроса, и продолжительности запроса или реконфигурации сети или участка сети для трафика динамических сообщений. Как обсуждалось выше, сообщения системы VMS, которые могут быть важны для работы транспортного средства, могут иметь приоритет по сравнению с сообщениями системы MMS.
[0049] В блоке 706 может быть выполнено определение того, был ли одобрен запрос для реконфигурации гибкой детерминированной сети. Если указанный запрос не был одобрен, способ 700 может переходить далее к блоку 708. В блоке 308 узел системы MMS или приложение может работать с ухудшенными характеристиками. Еще в одном варианте реализации блок текущего контроля, такой как устройство 188 управления режимом выполнения задания по ФИГ. 1, может анализировать систему и предпринимать корректирующее действие.
[0050] Если запрос для изменения потребностей в отношении связи и вызванной им реконфигурации гибкой детерминированной сети был одобрен в блоке 706, способ 700 может переходить далее к блоку 710. В блоке 710 гибкая детерминированная сеть может быть реконфигурирована для передачи динамически конфигурируемого трафика. Любые коммутаторы или коммутационные механизмы могут быть задействованы для удовлетворения новых потребностей в отношении связи. Одобрение запроса может быть отправлено на запрашивающий узел системы MMS или приложение. Связанные оконечные системы узлов системы VMS и узлов системы MMS могут быть реконфигурированы. Аналогично тому, что было описано выше, оконечные системы могут быть реконфигурированы с использованием таблиц маршрутизации, связанных с каждой оконечной системой для передачи динамически конфигурируемого трафика сообщений.
[0051] На ФИГ. 8 представлена блок-схема примера способа 800 передачи сообщений посредством гибкой детерминированной сети связи в соответствии еще с одним вариантом реализации настоящего изобретения. В блоке 802 реконфигурация сети или изменение режима может быть определена устройством управления режимом выполнения задания. В блоке 804 уведомление может быть передано на узлы системы MMS или приложения для переключения в новый режим или конфигурацию для передачи динамически конфигурируемого трафика сообщений. Сообщения далее могут быть переданы узлами системы MMS или приложениями и узлами системы VMS или приложениями, которые соответствуют новой конфигурации сети.
[0052] В блоке 806 гибкая детерминированная сеть и оконечные системы могут быть реконфигурированы для передачи статически конфигурируемого трафика сообщений в ответ на заданное действие. Например, гибкая детерминированная сеть и оконечные системы могут быть реконфигурированы после завершения передачи динамически конфигурируемого трафика или после запроса или заданного действия пользователем на реконфигурацию сети для статически конфигурируемого трафика сообщений.
[0053] На ФИГ. 9 представлена блок-схема примера способа 900 передачи сообщений, отформатированных по протоколу передачи данных недетерминированного типа по детерминированной сети связи или гибкой детерминированной сети связи, в соответствии с одним вариантом реализации настоящего изобретения. В блоке 902 сообщение может быть принято по протоколу передачи данных недетерминированного типа посредством процессора или узла от гибкой детерминированной сети. Например, сообщение может представлять собой сообщение по протоколу передачи данных сервиса распределения данных (DDS) или сообщение по иному протоколу передачи данных недетерминированного типа. Как описано ранее, узлы 244а-244n системы MMS и сенсорный узел 242 выполнения задания могут осуществлять связь с использованием протокола передачи данных DDS.
[0054] В блоке 904 недетерминированное сообщение может быть обработано уровнем абстракции. Блоки 906-910 показывают примеры функций, которые могут быть выполнены уровнем абстракции для обработки недетерминированного сообщения. В блоке 906 уровнем абстракции может быть определено качество обслуживания (QoS), связанное с недетерминированным сообщением.
[0055] В блоке 908, если сообщение имеет задействованную надежность качества обслуживания, уровень абстракции может отправить подтверждение приема. Подтверждение приема может быть отправлено по каналу подтверждения связи, который связан с каналом связи, в котором указанное сообщение было получено. Если сообщение представляет собой сообщение от одного издателя, сообщение может быть передано абонентскому приложению.
[0056] В блоке 910, если сообщение представляет собой сообщение, имеющее множество издателей, уровень абстракции может передать сообщение абонентскому приложению, в зависимости от других связанных параметров качества обслуживания и от того, получено ли сообщение от еще одного издателя или сообщения от других издателей по каналу связи, связанному с другим издателем, или по соответствующему каналу связи, связанному с каждым из других издателей. Факт предоставления абоненту значения данных, или семпла в терминологии DDS, может зависеть от факторов или параметров, относящихся к качеству обслуживания. Примеры параметров или факторов могут включать в себя, помимо прочего, "OWNERSHIP" (ВЛАДЕНИЕ), "OWNERSHIP_STRENGTH" (ПРИОРИТЕТ_ВЛАДЕНИЯ), "TIME_BASED_FILTER" (ФИЛЬТРАЦИЯ_ПО_ВРЕМЕНИ), "LIFESPAN" (ДОЛГОВЕЧНОСТЬ), "HISTORY" (ИСТОРИЯ) и "RESOURCE_LIMITS" (РЕСУРС_ПРЕДЕЛЫ). Параметр OWNERSHIP может подразумевать исключительное владение или совместное владение. Параметр OWNERSHIP_STRENGTH используют для определения того, какие данные издателей сохраняются при выборе параметра EXCLUSIVE. Параметр TIME_BASE_FILTER означает только одно значение представления абоненту в каждый период "minimum_separation" (минимум_разделение). Параметр LIFESPAN означает отбрасывание данных, которые старше этого значения. Параметр HISTORY определяет, что произойдет при приеме более новых значений перед считыванием абонентом этого значения. Параметр RESOURCE_LIMITS означает, что при превышении "max_samples" (макс семплы) значения данные отбрасывают, чтобы оставаться в пределах.
[0057] Представленные на фигурах чертежей блок-схемы и структурные блок-схемы иллюстрируют архитектуру, функциональность и работу возможных вариантов осуществления систем или способов согласно различным вариантам реализации настоящего изобретения. В этой связи каждый блок в блок-схеме или структурных блок-схемах может представлять модуль, сегмент или часть инструкций, который или которая содержит одну или более инструкций, подлежащих выполнению, для реализации конкретной логической функции (функций). В некоторых альтернативных вариантах осуществления функции, представленные в блоке, могут быть реализованы вне порядка, показанного на фигурах чертежей. Например, два блока, показанных последовательно, в действительности могут быть выполнены по существу одновременно, или указанные блоки могут быть выполнены в обратном порядке, в зависимости от задействованной функциональности. Следует также отметить, что каждый блок показанных структурных схем и/или блок-схем и комбинации блоков в показанных структурных блок-схемах и/или блок-схемах, может быть реализован с помощью систем на основе специализированных аппаратных средств, которые реализуют конкретные функции или действия или реализуют комбинации специализированных аппаратных средств и компьютерных инструкций.
[0058] Терминология, использованная в настоящем документе, предназначена только для целей описания конкретных вариантов реализации и не предназначена для ограничения вариантов реализации изобретения. Как использовано в настоящем документе, формы единственного числа "a", "an" и "the" предназначены также для включения форм множественного числа, если из контекста явно не следует другое. Следует также понимать, что выражения "содержит" и/или " содержащий" при использовании в настоящем документе, указывают на наличие указанных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают существование дополнительных одного или более других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их группы.
[0059] Соответствующие конструкции, материалы, действия и эквиваленты всех средств или элементов "этап плюс функция" в формуле изобретения, следующей ниже, предназначены для включения любой конструкции, материала или действия для выполнения функции в сочетании с другими представленными в формуле элементами, как конкретно заявлено в формуле изобретения. Описание настоящего изобретения было представлено в целях иллюстрации и описания, однако оно не претендует на исчерпывающий характер или не ограничивается раскрытыми вариантами осуществления изобретения. Специалисту в данной области техники будут очевидны многие его модификации и варианты без выхода за пределы объема и сущности вариантов осуществления изобретения. Варианты реализации настоящего изобретения были выбраны и описаны в целях наилучшего объяснения его принципов и практического применения, а также обеспечения возможности понимания указанных вариантов реализации изобретения другими специалистами в данной области техники для выполнения различных вариантов осуществления с различными модификациями, которые подходят для конкретного планируемого использования.
Дополнительно настоящее раскрытие содержит варианты реализации согласно следующим пунктам:
Пункт 1. Бортовая система транспортного средства, содержащая:
систему для управления транспортным средством (VMS), содержащую множество узлов системы VMS для управления работой транспортного средства;
систему для управления выполнением задания (MMS), содержащую множество узлов системы MMS для управления оборудованием, связанным с заданием, выполняемым транспортным средством; и
гибкую детерминированную сеть связи, выполненную с возможностью конфигурирования для обеспечения связи между каждым из узлов системы VMS, между каждым из узлов системы MMS и между узлами системы VMS и узлами системы MMS, причем
узлы системы VMS выполнены с возможностью осуществления связи с использованием статических, детерминированных сообщений, а узлы системы MMS выполнены с возможностью осуществления связи с использованием динамических, недетерминированных сообщений.
Пункт 2. Система по пункту 1, в которой гибкая детерминированная сеть содержит:
оконечную систему, связанную с каждым узлом системы VMS;
оконечную систему, связанную с каждым узлом системы MMS;
коммутационный механизм, выполненный с возможностью конфигурирования для обеспечения соединения оконечных систем.
Пункт 3. Система по пункту 2, в которой виртуальный канал установлен между конкретной парой узлов через коммутационный механизм для обеспечения связи между указанной конкретной парой узлов, причем
конкретная пара узлов содержит любую комбинацию узлов системы VMS и узлов системы MMS.
Пункт 4. Система по пункту 3, в которой с виртуальным каналом связан временной интервал.
Пункт 5. Система по пункту 1, в которой гибкая детерминированная сеть связи содержит:
набор статических виртуальных каналов и
набор динамических виртуальных каналов, причем
гибкая детерминированная сеть связи выполнена с возможностью конфигурирования для передачи статических, детерминированных сообщений с использованием статических виртуальных каналов, и
гибкая детерминированная сеть связи выполнена с возможностью конфигурирования для передачи динамических, недетерминированных сообщений с использованием набора динамических виртуальных каналов.
Пункт 6. Система по пункту 5, в которой гибкая детерминированная сеть выполнена с возможностью конфигурирования для обеспечения связи между соответствующим одним или более узлами системы VMS и соответствующим одним или более узлами системы MMS с использованием по меньшей мере одного из таких наборов, как набор статических виртуальных каналов и набор динамических виртуальных каналов.
Пункт 7. Система по пункту 5, в которой гибкая детерминированная сеть связи дополнительно содержит процессор, выполненный с возможностью управления конфигурацией виртуального канала.
Пункт 8. Система по пункту 7, в которой процессор выполнен с возможностью выполнения набора функций, включающего:
прием сообщения;
проверку принятого сообщения по отношению к текущей конфигурации гибкой детерминированной сети связи;
передачу принятого сообщения по гибкой детерминированной сети связи при соответствии принятого сообщения текущей конфигурации и
воздержание от передачи принятого сообщения по гибкой детерминированной сети связи при несоответствии принятого сообщения текущей конфигурации.
Пункт 9. Система по пункту 8, в которой набор функций дополнительно включает:
прием запроса от приложения, работающего на одном из узлов системы MMS или узлов системы VMS, на реконфигурацию гибкой детерминированной сети связи исходя из потребностей в отношении связи указанного приложения;
определение одобрения запроса и
реконфигурацию по меньшей мере части гибкой детерминированной сети для удовлетворения потребностей в отношении связи указанного приложения при одобрении запроса.
Пункт 10. Система по пункту 9, в которой реконфигурация по меньшей мере части гибкой детерминированной сети содержит:
реконфигурацию оконечной системы, связанной с каждым из узлов системы MMS или узлов системы VMS, осуществляющих связь друг с другом; и
реконфигурацию коммутационного механизма для обеспечения соединения оконечных систем.
Пункт 11. Система по пункту 10, в которой запрашивающее приложение координирует реконфигурацию оконечных систем и коммутационного механизма.
Пункт 12. Система по пункту 9, в которой определение возможности одобрения запроса содержит определение доступной пропускной способности гибкой детерминированной сети связи исходя из осуществляемой связи между узлами по гибкой детерминированной сети и соответствия по меньшей мере указанной доступной пропускной способности пропускной способности запроса.
Пункт 13. Система по пункту 9, в которой по меньшей мере запрашивающее приложение работает с ухудшенными характеристиками при отсутствии одобрения запроса на реконфигурацию гибкой детерминированной сети связи.
Пункт 14. Система по пункту 1, в которой указанная система развернута на воздушном летательном аппарате.
Пункт 15. Бортовая система транспортного средства, содержащая:
систему для управления транспортным средством (VMS), содержащую множество узлов системы VMS для управления работой транспортного средства;
систему для управления выполнением задания (MMS), содержащую множество узлов системы MMS для управления оборудованием, связанным с заданием, выполняемым транспортным средством;
приложение, выполненное с возможностью его запуска на каждом узле системы VMS и каждом узле системы MMS;
уровень сервиса распределения данных, связанный с каждым приложением для обеспечения связи между приложениями, и
уровень абстракции, выполненный с возможностью сокрытия реконфигурации уровня сервиса распределения данных от приложения для использования детерминированного протокола передачи данных.
Пункт 16. Система по пункту 15, дополнительно содержащая гибкую детерминированную сеть связи, которая выполнена с возможностью конфигурирования для обеспечения связи между узлами.
Пункт 17. Способ передачи сообщений, включающий:
прием сообщения;
проверку принятого сообщения по отношению к текущей конфигурации гибкой детерминированной сети связи;
передачу принятого сообщения по гибкой детерминированной сети связи при соответствии принятого сообщения текущей конфигурации;
воздержание от передачи принятого сообщения по гибкой детерминированной сети связи при несоответствии принятого сообщения текущей конфигурации.
Пункт 18. Способ по пункту 17, дополнительно включающий:
прием запроса от приложения на реконфигурацию гибкой детерминированной сети связи исходя из потребностей в отношении связи указанного приложения;
определение одобрения запроса и
реконфигурацию по меньшей мере части гибкой детерминированной сети для удовлетворения потребностей в отношении связи указанного приложения при одобрении запроса.
Пункт 19. Способ по пункту 18, согласно которому определение возможности одобрения запроса включает определение доступной пропускной способности гибкой детерминированной сети связи исходя из осуществляемой связи между множеством узлов по гибкой детерминированной сети и соответствия указанной доступной пропускной способности пропускной способности запроса.
Пункт 20. Способ по пункту 19, дополнительно включающий:
реконфигурацию оконечной системы по меньшей мере каждого из узлов, осуществляющих связь друг с другом, и
реконфигурацию коммутационного механизма для обеспечения соединения оконечных систем.
Хотя в настоящем документе были проиллюстрированы конкретные варианты реализации изобретения, специалистам в данной области техники будет понятно, что любая конструкция, рассчитанная на достижение той же цели, может быть заменена для показанных конкретных вариантов реализации изобретения и что варианты его реализации имеют другие возможности применения в других условиях. Настоящая заявка охватывает любые модификации и варианты реализации данного изобретения. Следующая ниже формула изобретения ни в коей мере не предназначена для ограничения объема настоящего изобретения раскрытыми в настоящем документе вариантами его реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для управления устройствами и контроля устройств | 2017 |
|
RU2648564C1 |
| ОПТИМИЗИРОВАННАЯ РЕКОНФИГУРАЦИЯ ПАРАМЕТРОВ RLM И КОНТРОЛЯ ПУЧКА | 2019 |
|
RU2746585C1 |
| Способ передачи сообщений в режиме реального времени на борту космических аппаратов | 2018 |
|
RU2704716C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕКОНФИГУРАЦИИ ОБЩЕГО КАНАЛА | 2006 |
|
RU2417552C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАДИОСОЕДИНЕНИЯМИ С ВИРТУАЛЬНОЙ ТОЧКОЙ ДОСТУПА | 2017 |
|
RU2711555C1 |
| Система передачи информации в реальном времени на базе полностью оптической спектрально-уплотнённой бортовой сети реального времени | 2018 |
|
RU2694137C1 |
| СИСТЕМЫ И СПОСОБЫ УЛУЧШЕННОЙ БЕСПРОВОДНОЙ СВЯЗИ В ЛЕТАТЕЛЬНЫХ АППАРАТАХ | 2018 |
|
RU2762799C2 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ МЕСТОПОЛОЖЕНИЯ И ИНИЦИИРОВАНИЯ УВЕДОМЛЕНИЙ, ОСНОВАННАЯ НА ГЕОЗОНИРОВАНИИ | 2019 |
|
RU2799399C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫБОРА ЭЛЕМЕНТОВ ДАННЫХ ДЛЯ ЗАПРОСОВ НА ОБСЛУЖИВАНИЕ | 2003 |
|
RU2301506C2 |
| СПОСОБ РЕКОНФИГУРИРОВАНИЯ ВЕТВЕЙ РАЗНЕСЕНИЯ СЕТИ РАДИОСВЯЗИ ПРИ УПОРЯДОЧИВАНИИ ИНТЕРФЕЙСА ОС-РКС (ОСНОВНАЯ СЕТЬ-РАДИОСЕТЕВОЙ КОНТРОЛЛЕР) | 1999 |
|
RU2233046C2 |





Бортовая система транспортного средства 100 может включать в себя систему VMS 102 управления транспортным средством (VMS) и систему MMS 104 управления выполнением задания (MMS). Система VMS 102 может включать в себя множество узлов 110а-110n системы VMS для управления работой транспортного средства 100. Система MMS 104 может включать в себя множество узлов 144а-144n системы MMS для управления оборудованием, связанным с заданием, выполняемым транспортным средством 100. Система также может включать в себя гибкую детерминированную сеть 106 связи. Гибкая детерминированная сеть 106 связи может быть выполнена с возможностью конфигурирования для обеспечения связи между каждым из узлов 110а-110n системы VMS, между каждым из узлов 144а-144n системы MMS и между узлами 110а-110n системы VMS и узлами 144а-144n системы MMS. Узлы 110а-110n системы VMS выполнены с возможностью осуществления связи с использованием статических, детерминированных сообщений, а узлы 144а-144n системы MMS выполнены с возможностью осуществления связи с использованием динамических, недетерминированных сообщений. 3 н. и 15 з.п. ф-лы, 9 ил.
1. Бортовая система транспортного средства (100), содержащая:
систему (102) для управления транспортным средством, содержащую множество узлов (110a-110n) для управления работой транспортного средства (100);
систему (104) для управления выполнением задания, содержащую множество узлов (144a-144n) для управления оборудованием, связанным с заданием, выполняемым транспортным средством (100); и
гибкую детерминированную сеть (106) связи, выполненную с возможностью конфигурирования для обеспечения связи между каждым из узлов (110a-110n) системы для управления транспортным средством, между каждым из узлов (144a-144n) системы для управления выполнением задания и между узлами (110a-110n) системы для управления транспортным средством и узлами (144a-144n) системы для управления выполнением задания, причем
узлы (110a-110n) системы для управления транспортным средством выполнены с возможностью осуществления связи с использованием статических, детерминированных сообщений, а узлы (144a-144n) системы для управления выполнением задания выполнены с возможностью осуществления связи с использованием динамических, недетерминированных сообщений,
причем гибкая детерминированная сеть (106) связи содержит:
оконечную систему (134), связанную с каждым узлом (110a-110n) системы для управления транспортным средством;
оконечную систему (170), связанную с каждым узлом системы для управления выполнением задания; и
коммутационный механизм (182), выполненный с возможностью конфигурирования для обеспечения соединения оконечных систем (134,170),
набор статических виртуальных каналов (184a), причем каждый статический виртуальный канал (184a) имеет предварительно определенную пропускную способность,
набор динамических виртуальных каналов (184b), причем каждый динамический виртуальный канал (184b) имеет переменную пропускную способность, которая соответствует пропускной способности передаваемого динамического, недетерминированного сообщения, при этом гибкая детерминированная сеть (106) связи выполнена с возможностью конфигурирования для передачи статических, детерминированных сообщений с использованием статических виртуальных каналов (184a) и с возможностью конфигурирования для передачи динамических, недетерминированных сообщений с использованием набора динамических виртуальных каналов (184b), и
контроллер (180) для реконфигурации гибкой детерминированной сети (106) связи, причем гибкая детерминированная сеть (106) связи и оконечные системы (134,170):
(i) или реконфигурированы для передачи динамических, недетерминированных сообщений при условии достаточности доступной пропускной способности гибкой детерминированной сети, как определено контроллером (180),
(ii) или не реконфигурированы для передачи динамических, недетерминированных сообщений при условии недостаточности доступной пропускной способности,
причем связь системы для управления транспортным средством имеет приоритет над связью системы для управления выполнением задания в отношении конфигурирования гибкой детерминированной сети (106) и оконечных систем (134,170).
2. Система по п. 1, в которой между конкретной парой узлов через коммутационный механизм (182) установлен виртуальный канал (184) для обеспечения связи между указанной конкретной парой узлов, причем
указанная конкретная пара узлов содержит любую комбинацию узлов (110a-110n) системы для управления транспортным средством и узлов (144a-144n) системы для управления выполнением задания.
3. Система по п. 2, в которой с виртуальным каналом (184) связан временной интервал.
4. Система по п. 1, в которой гибкая детерминированная сеть (106) выполнена с возможностью конфигурирования для обеспечения связи между соответствующим одним или более узлами (110a-110n) системы для управления транспортным средством и соответствующим одним или более узлами (144a-144n) системы для управления выполнением задания с использованием по меньшей мере одного из таких наборов, как набор статических виртуальных каналов (184a) и набор динамических виртуальных каналов (184b).
5. Система по п. 1, в которой контроллер (180) выполнен с возможностью управления конфигурацией виртуального канала (184).
6. Система по п. 1, в которой контроллер (180) выполнен с возможностью выполнения набора функций, включающих:
прием сообщения;
проверку принятого сообщения по отношению к текущей конфигурации гибкой детерминированной сети (106) связи;
передачу принятого сообщения по гибкой детерминированной сети (106) связи при соответствии принятого сообщения текущей конфигурации и
воздержание от передачи принятого сообщения по гибкой детерминированной сети (106) связи при несоответствии принятого сообщения текущей конфигурации.
7. Система по п. 6, в которой набор функций также включает:
прием запроса от приложения (164,128), работающего на одном из узлов (144a-144n) системы для управления выполнением задания или узлов (110a-110n) системы для управления транспортным средством, на реконфигурацию гибкой детерминированной сети (106) связи исходя из потребностей в отношении связи указанного приложения;
определение одобрения запроса и
реконфигурацию по меньшей мере части гибкой детерминированной сети (106) для удовлетворения потребностей в отношении связи указанного приложения (164,128) при одобрении запроса.
8. Система по п. 7, в которой реконфигурация по меньшей мере части гибкой детерминированной сети (106) содержит:
реконфигурацию оконечной системы (134,170), связанной с каждым из узлов (144a-144n) системы для управления выполнением задания или узлов (110a-110n) системы для управления транспортным средством, осуществляющих связь друг с другом, и
реконфигурацию коммутационного механизма (182) для обеспечения соединения оконечных систем (134,170).
9. Система по п. 8, в которой запрашивающее приложение координирует реконфигурацию оконечных систем (134,170) и коммутационного механизма (182).
10. Система по п. 7, в которой определение возможности одобрения запроса содержит определение доступной пропускной способности гибкой детерминированной сети (106) связи исходя из осуществляемой связи между узлами по гибкой детерминированной сети (106) и соответствия по меньшей мере указанной доступной пропускной способности пропускной способности запроса.
11. Система по п. 7, в которой по меньшей мере запрашивающее приложение работает с ухудшенными характеристиками при отсутствии одобрения запроса на реконфигурацию гибкой детерминированной сети (106) связи.
12. Система по п. 1, развернутая на воздушном летательном аппарате.
13. Бортовая система транспортного средства (100), содержащая:
систему (102) для управления транспортным средством, содержащую множество узлов (110a-110n) для управления работой транспортного средства (100);
систему (104) для управления выполнением задания, содержащую множество узлов (144a-144n) для управления оборудованием, связанным с заданием, выполняемым транспортным средством (100);
приложение (164,128), выполненное с возможностью его запуска на каждом узле (110a-110n) системы для управления транспортным средством и каждом узле (144a-144n) системы для управления выполнением задания;
уровень сервиса распределения данных, связанный с каждым приложением для обеспечения связи между приложениями; и
уровень (410a-410c) абстракции, выполненный с возможностью сокрытия реконфигурации уровня сервиса распределения данных от приложения для использования детерминированного протокола передачи данных.
14. Система по п. 13, также содержащая гибкую детерминированную сеть (106) связи, которая выполнена с возможностью конфигурирования для обеспечения связи между узлами.
15. Способ (600) передачи сообщений в системе по п. 1, включающий:
прием (602) сообщения;
проверку (604) принятого сообщения по отношению к текущей конфигурации гибкой детерминированной сети (106) связи;
передачу (608) принятого сообщения по гибкой детерминированной сети (106) связи при соответствии принятого сообщения текущей конфигурации и
воздержание (610) от передачи принятого сообщения по гибкой детерминированной сети (106) связи при несоответствии принятого сообщения текущей конфигурации.
16. Способ (600) по п. 15, также включающий:
прием запроса от приложения на реконфигурацию гибкой детерминированной сети (106) связи исходя из потребностей в отношении связи указанного приложения;
определение одобрения запроса и
реконфигурацию по меньшей мере части гибкой детерминированной сети (106) для удовлетворения потребностей в отношении связи указанного приложения при одобрении запроса.
17. Способ (600) по п. 16, согласно которому определение возможности одобрения запроса включает определение доступной пропускной способности гибкой детерминированной сети (106) связи исходя из осуществляемой связи между множеством узлов по гибкой детерминированной сети (106) и соответствия указанной доступной пропускной способности пропускной способности запроса.
18. Способ (600) по п. 17, также включающий:
реконфигурацию оконечной системы (134,170) по меньшей мере каждого из узлов, осуществляющих связь друг с другом, и
реконфигурацию коммутационного механизма (182) для обеспечения соединения оконечных систем (134,170).
| ИНЖЕКТОР КАМЕРЫ СГОРАНИЯ ГАЗОВОЙ ТУРБИНЫ С ДВОЙНОЙ ТОПЛИВНОЙ СИСТЕМОЙ И КАМЕРА СГОРАНИЯ, СНАБЖЕННАЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНИМ ТАКИМ ИНЖЕКТОРОМ | 2012 |
|
RU2584741C2 |
| US 2011066854 A1, 17.03.2011 | |||
| CN 104680853 A, 03.06.2015 | |||
| US 8972512 B2, 03.03.2015. | |||

