Область техники, к которой относится изобретение
Варианты осуществления в данном документе относятся к системам беспроводной связи, таким как сотовые сети или тому подобное. В частности, раскрыт способ и устройство беспроводной связи для управления запросом определения местоположения, относящимся к оценке местоположения устройства беспроводной связи, посредством мультилатерации в сотовой сети, а также способ и узел определения местоположения для управления запросом определения местоположения, относящиеся к оценке местоположения устройства беспроводной связи посредством мультилатерации. Кроме того, раскрыты соответствующие компьютерные программы и носители компьютерных программ.
Уровень техники
Известно, что в сотовых сетях определяют местоположение устройства пользователя (например, мобильная станция (MS)) или устройство, для краткости, в сотовой сети с помощью различных способов.
Один такой способ обычно называют мультилатерацией, основанной на измерении времени задержки ответного сигнала (TA). Например, трилатерация ТА, как описано в RP-161034, представляющий собой усовершенствованный способ позиционирования для глобальной системы мобильной связи (GSM) для увеличенной скорости передачи данных GSM Evolution (EDGE) для сети радиодоступа (GERAN). RAN №72 полагает установление местоположения устройства пользователя, такого как мобильная станция, на основании значений TA во множестве сот.
TA является мерой величины задержки распространения между базовой приемопередающей станцией (BTS) и MS и, поскольку скорость, с которой распространяются радиоволны, известна, можно определить расстояние между BTS и MS. Кроме того, если TA, применимая к MS, измеряется от нескольких BTSs, и местоположения этих BTSs известны, то может быть получено местоположение MS с использованием измеренных значений TA. Измерение TA требует, чтобы MS синхронизировалась с каждой соседней BTS и передавала сигнал, выровненный по времени с оцененной синхронизацией канала нисходящей линии связи, принятой от каждой BTS. BTS измеряет разницу во времени между своим собственным опорным временным значением для канала нисходящей линии связи и синхронизацией принятого сигнала (передаваемого MS). Эта разница во времени равна двухкратной задержке распространения между BTS и MS (одна задержка распространения сигнала синхронизации BTS, отправленного по нисходящему каналу в MS, плюс одна равная задержка распространения сигнала, передаваемого MS обратно в BTS).
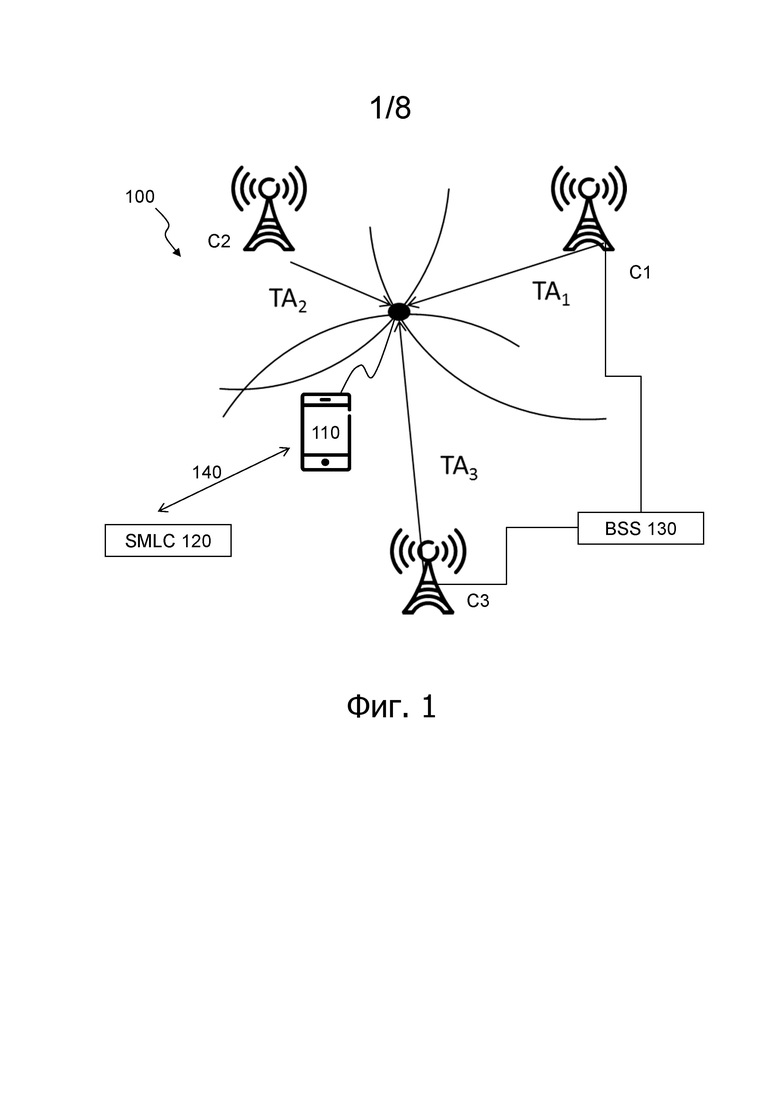
Как только набор значений TA установлен набором из одной или нескольких BTS, используемых во время данной процедуры определения местоположения, положение MS может быть получено посредством так называемой мультилатерацией, где местоположения MS определяют по пересечению набора гиперболических кривых, ассоциированных с каждой BTS, см. фиг. 1. Расчет местоположения MS обычно выполняет обслуживающий узел позиционирования, такой как обслуживающий центр определения местоположения (SMLC), что подразумевает, что все полученные значения времени задержки ответного сигнала и ассоциированной информации о местоположении BTS необходимо отправить в узел позиционирования, который инициировал процедуру позиционирования, то есть, обслуживающий узел позиционирования. В некоторых случаях BTS, используемая во время данной процедуры позиционирования, может быть ассоциирована с необслуживающим узлом позиционирования и, в этом случае, полученное значение времени задержки ответного сигнала и ассоциированная информация о местоположении BTS, доступная этой BTS, должны быть в обслуживающий узел позиционирования.
Интернет вещей (IoT)
Ожидается, что в ближайшее время количество сотовых IoT устройств значительно возрастет. По различным прогнозам, предполагают, что на квадратный километр будет приходиться> 60000 устройств, другие прогнозируют, что на квадратный километр будет приходиться 1000000 устройств. Ожидают, что большая часть этих устройств будет установлена стационарно, например, счетчики газа и электроэнергии, торговые автоматы и т.д.
Расширенное покрытие (EC)-GSM-IoT и узкополосный интернет вещей (NB-IoT) являются двумя стандартами для поддержки устройств сотовой связи IoT, которые были определены сетью радиодоступа (3GPP) проекта партнерства 3GPP TSG 3-го поколения (GERAN) и TSG RAN.
В RAN1 № 86 также для поддержки определения местоположения мобильных устройств NB-IoT, таких как сенсорные устройства или тому подобное было сделано предложение, основанное на подходе, аналогичном первоначально упомянутому положению на основе TA.
Из-за ограниченной емкости батареи мобильных устройств IoT предлагаемый способ может быть недостаточно энергоэффективным.
Раскрытие сущности изобретения
Задача может заключаться в повышении производительности вышеупомянутой сотовой сети.
Согласно аспекту, задачу решают с помощью способа, выполняемого устройством беспроводной связи, для управления запросом определения местоположения, относящимся к оценке местоположения устройства беспроводной связи, посредством мультилатерации в сотовой сети, которая содержит соты. Устройство беспроводной связи принимает от узла определения местоположения запрос определения местоположения, содержащий информацию. Информация указывает первый набор сот, используемых устройством беспроводной связи при установлении значений времени задержки ответного сигнала. Затем устройство беспроводной связи определяет второй набор сот на основании информации. Кроме того, устройство беспроводной связи устанавливает значения времени задержки ответного сигнала для второго набора сот.
Согласно другому аспекту, задачу решают устройством беспроводной связи, выполненным с возможностью управления запросом определения местоположения, относящимся к оценке местоположения устройства беспроводной связи, посредством мультилатерации в сотовой сети, содержащей соты. Устройство беспроводной связи выполнено с возможностью принимать от узла определения местоположения запрос определения местоположения, содержащего информацию. Информация указывает первый набор сот, используемых устройством беспроводной связи при установлении значений времени задержки ответного сигнала. Устройство беспроводной связи выполнено с возможностью определения второго набора сот на основании информации. Кроме того, устройство беспроводной связи выполнено с возможностью установки значения времени задержки ответного сигнала для второго набора сот.
Согласно дополнительному аспекту, задачу решают с помощью способа, выполняемого узлом определения местоположения, для управления запросом определения местоположения, относящимся к оценке местоположения устройства беспроводной связи, посредством мультилатерации в сотовой сети, содержащей соты. Узел определения местоположения определяет информацию. Информация указывает первый набор сот, используемых устройством беспроводной связи при установлении значений времени задержки ответного сигнала. Кроме того, узел определения местоположения отправляет устройству беспроводной связи запрос местоположения, содержащий информацию.
Согласно еще одному дополнительному аспекту, задачу решают узлом определения местоположения, выполненным с возможностью управлять запросом определения местоположения, относящимся к оценке местоположения устройства беспроводной связи, посредством мультилатерации в сотовой сети, содержащей соты. Узел определения местоположения выполнен с возможностью определять информацию. Информация указывает первый набор сот, используемых устройством беспроводной связи при установлении значений времени задержки ответного сигнала. Кроме того, узел определения местоположения выполнен с возможностью передачи на устройство беспроводной связи запроса местоположения, содержащего информацию.
Согласно дополнительным аспектам, задачу решают компьютерными программами и носителями компьютерных программ, соответствующими вышеупомянутым аспектам.
Благодаря тому, что устройству беспроводной связи предоставляют информацию, на основании которой оно может автономно определять второй набор сот, которые должны быть использованы для мультилатерации, получают несколько преимуществ. По сравнению с возможностью сети определять набор сот, которые будут использованы для мультилатерации, требуется меньше сигнализации, так как отчеты об измерениях из устройства беспроводной связи в первую очередь потребуются до того, как сеть определит набор сот, которые будут использованы (то есть, вызывают более длительные задержки и расход энергии батареи устройства будет увеличен, если сеть определит набор сот, которые будут использоваться). По сравнению с тем, что устройство беспроводной связи может самостоятельно определять второй набор сот, которые будут использованы для мультилатерации, без указания сети, можно избежать совмещенных сот и, таким образом, повысить точность мультилатерации.
Следовательно, преимущество заключается в том, что общее потребление энергии может быть снижено, например, уменьшенное потребление энергии батареи устройства и/или меньший объем сигнализации, что требует меньше энергии), и точность определения местоположения может быть повышена.
Краткое описание чертежей
Различные аспекты вариантов осуществления, раскрытых в данном документе, включающие в себя конкретные признаки и их преимущества, будут легко поняты из следующего подробного описания и прилагаемых чертежей, на которых представлены фиг. 1-8.
Осуществление изобретения
Во всем последующем описании одинаковые ссылочные позиции использовались для обозначения сходных признаков, таких как узлы, действия, модули, схемы, части, элементы, элементы, блоки или тому подобное, когда это применимо. На чертежах признаки, которые присутствуют в некоторых вариантах осуществления, обозначены пунктирными линиями.
В целях упрощения описаний, представленных в данном документе, могут использоваться следующие определения:
Внешняя BTS: BTS, ассоциированная с подсистемой базовой станции (BSS), которую использует узел позиционирования, который отличается от узла позиционирования, используемого BSS, который управляет сотой, обслуживающей MS, при инициировании процедуры позиционирования в соответствии с вариантами осуществления в данном документе. В этом случае, полученная информация о времени задержки ответного сигнала и идентификационные данные соответствующей соты ретранслируют в обслуживающий узел позиционирования с использованием базовой сети (то есть, в этом случае, BSS не имеет контекста для MS).
Локальная BTS: BTS, ассоциированная с другой BSS, но все же BSS, которая использует тот же узел позиционирования, что и BSS, который управляет сотой, обслуживающей MS, когда инициируют процедуру позиционирования. В этом случае, полученная информация о времени задержки ответного сигнала и идентификационные данные соответствующей соты ретранслируют в обслуживающий узел позиционирования с использованием базовой сети (то есть, в этом случае BSS не имеет контекста для MS).
Обслуживающая BTS: BTS, ассоциированная с BSS, которая управляет сотой, обслуживающей MS, когда инициируют процедуру позиционирования. В этом случае, полученная информация о времени задержки ответного сигнала и идентификатор соответствующей соты отправляют непосредственно в обслуживающий узел позиционирования (т.е. в этом случае, BSS имеет контекст для MS).
Обслуживающий SMLC узел: SMLC узел, который выдает команду MS на выполнение процедуры мультилатерации, то есть, он отправляет запрос мультилатерации на протокол (RRLP) определения местоположения радиоресурсов (LCS) в MS.
Обслуживающая BSS: BSS, ассоциированная с обслуживающей BTS (то есть BSS, которая имеет контекстную информацию для временного идентификатора логической линии (TLLI), соответствующего MS, для которой была инициирована процедура мультилатерации).
Не обслуживающая BSS: BSS, ассоциированная с внешней BTS (то есть, BSS, которая не имеет контекстной информации для TLLI, соответствующего MS, для которой была инициирована процедура мультилатерации).
Теперь, возвращаясь к фиг. 1, где показана иллюстративная сотовая сеть 100, в которой варианты осуществления в данном документе могут быть реализованы. В этом примере сотовая сеть 100 является GSM сетью.
В других примерах сотовая сеть 100 может представлять собой любую сотовую или беспроводную систему связи, такую как система долгосрочного развития (LTE), универсальная система мобильной связи (UMTS) и всемирная совместимость для микроволнового доступа (WiMAX), обеспечивающая уровень D2D связи или подобное, аналогичное, похожее.
Можно сказать, что сеть 100 содержит устройство 110 беспроводной связи. Это означает, что устройство 110 беспроводной связи находится в сотовой сети 100. Местоположение устройства 110 беспроводной связи обозначено черной точкой.
Кроме того, на фиг. 1 показан узел 120 определения местоположения. Узел 120 определения местоположения может быть SMLC, E-SMCL или т.п.
Кроме того, узел 130 радиосети показан на фиг. 1. Узел 130 радиосети может быть BSS, контроллером базовой станции (BSC), базовой станцией, базовой станцией радиосвязи, контроллером радиосети (RNC) или т.п.
Узел 130 радиосети, такой как BSS, может управлять одной или несколькими сотами сотовой сети 100. В качестве примера, узел радиосети может работать с сотами C1, C2 и C3.
Устройство 110 беспроводной связи и узел 120 определения местоположения могут устанавливать связь 140 друг с другом, например, через одну или несколько сот, хотя это явно не показано на чертеже.
Используемый здесь термин «устройство беспроводной связи» может относиться к устройству пользователя, мобильной станции, устройству «машина-машина» (M2M), мобильному телефону, сотовому телефону, персональному цифровому помощнику (PDA), смартфон, ноутбук или персональный компьютер (РС), оснащенный внутренним или внешним мобильным широкополосным модемом, планшетный РС с возможностями радиосвязи, портативное электронное устройство радиосвязи, сенсорное устройство, оснащенное возможностями радиосвязи, или т.п.. Термин «пользователь» может косвенно относиться к термину, определенному в этом параграфе. Иногда термин «пользователь» может использоваться для обозначения устройства пользователя или тому подобного, как указано выше. Следует понимать, что пользователь не обязательно должен включать себя пользователя человека. Термин «пользователь» может также относиться к машине, программному компоненту или тому подобному, использующему определенные функции, способы и тому подобное.
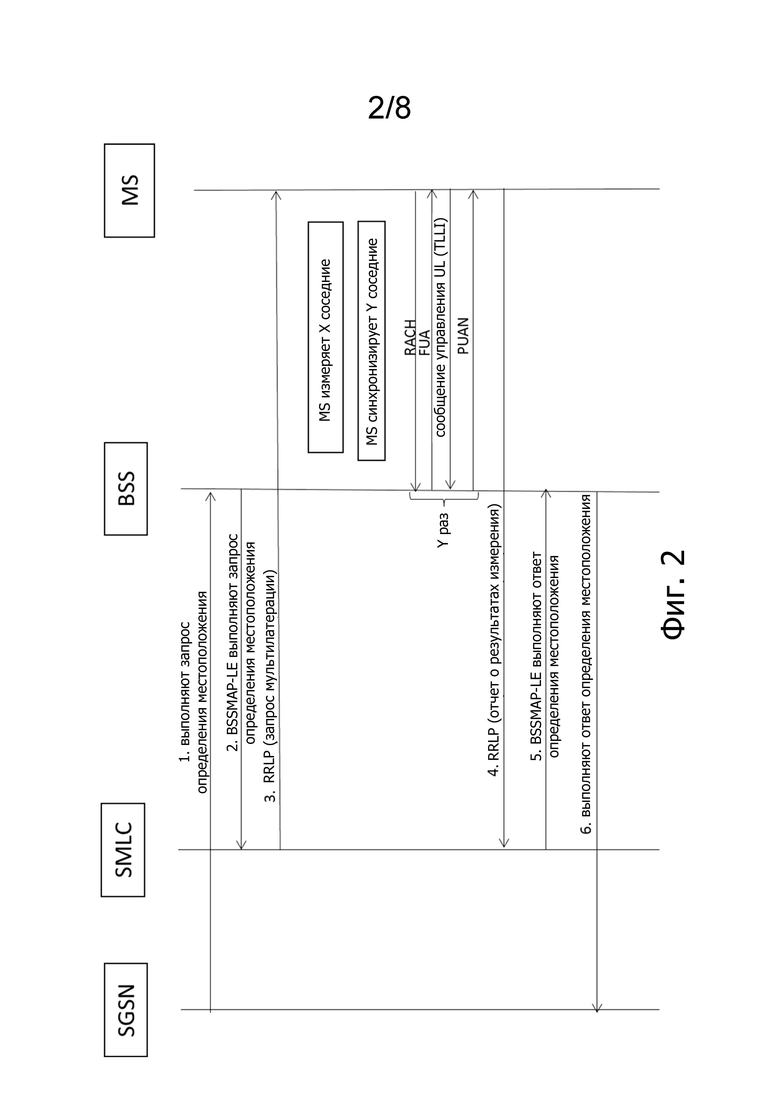
На совещании RAN6 №1 были обсуждены несколько вариантов, касающихся сигнализации и подробной процедуры для процедуры мультилатерации. На высоком уровне были представлены два варианта, которые назывались «Способ с поддержкой сети» и «Автономный способ MS». В способе с помощью сети сеть решает, что базовые станции должны быть использованы для мультилатерации (на основании отчета об измерении из MS), в то время как в автономном способе MS, MS решает, какие соты должны использоваться, на основании уровня сигнала [R6-160012]. На фиг. 2 показана предлагаемая сигнализация для автономного способа MS, а на этапе 4 MS отправляет отчет об измерениях, который включает в себя идентификаторы сот и ассоциированные значения времени задержки ответного сигнала, в SMLC узел, который будет использован для расчета местоположения. Следует отметить, что на этапе 4 MS отправляет отчет об измерениях в виде RRLP сообщения, переносимого в протокольном блоке данных (PDU) управления логическим каналом (LLC), отправляемом в SGSN, который извлекает RRLP сообщение из PDU LLC и ретранслирует его в обслуживающую BSS в PDU протокола (BSSGP) системы пакетной радиосвязи общего назначения (GPRS), который затем пересылает RRLP сообщение в обслуживающий SMLC (эти промежуточные этапы не показаны на этапе 4).
Один недостаток автономного способа MS состоит в том, что, когда MS автономно выбирает базовые станции на основании уровня сигнала, то есть, неизвестно, подходят ли выбранные базовые станции с точки зрения позиционирования или нет, например, если она выбирает три соты и две из них оказываются совмещенным (также называемые совместно размещёнными), тогда будет невозможно определить уникальное местоположение устройства. Термин «совмещенный» означает, что соты расположены в одном и том же или, по существу, одинаковом географическом местоположении и/или управляются одной и той же BSS. Кроме того, из списка распределения каналов управления широковещательной передачей (списка BA) устройство 110 беспроводной связи не знает, принадлежат ли соты обслуживающей BSS или другой BSS. Список BA включает в себя частоты соседних сот.
На совещании было также обсуждено несколько оптимизаций для снижения энергопотребления устройства 110 беспроводной связи [R6-160085], и в этом контексте было бы выгодно исключить этап 4 на фиг. 2, чтобы сэкономить энергию, необходимую для передачи этого отчета. Это может быть достигнуто за счет того, что BSS собирает значения времени задержки ответного сигнала и отправляет их узлу позиционирования, и это фактически было предложено для способа с поддержкой сети. Другим способом снижения энергопотребления, который обсуждался, была пакетная передача доступа без установления соединения для оценки TA посредством использования короткого идентификатора.
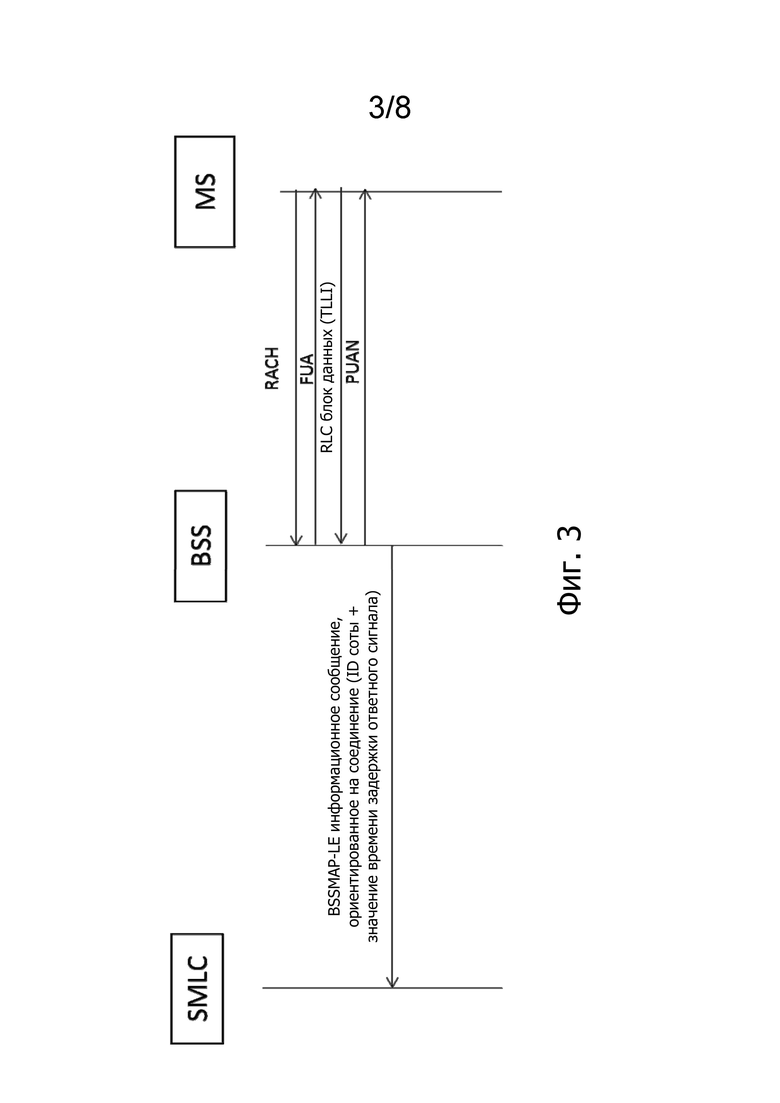
На фиг. 3 проиллюстрирована процедура для определения значения времени задержки ответного сигнала и отправки его на обслуживающий SMLC узел при передаче по восходящей линии связи радиоблока, такого как блок данных управления линией радиосвязи (RLC), на выделенном ресурсе для обслуживающей BSS и EC-GSM-IoT для поддержки устройства.
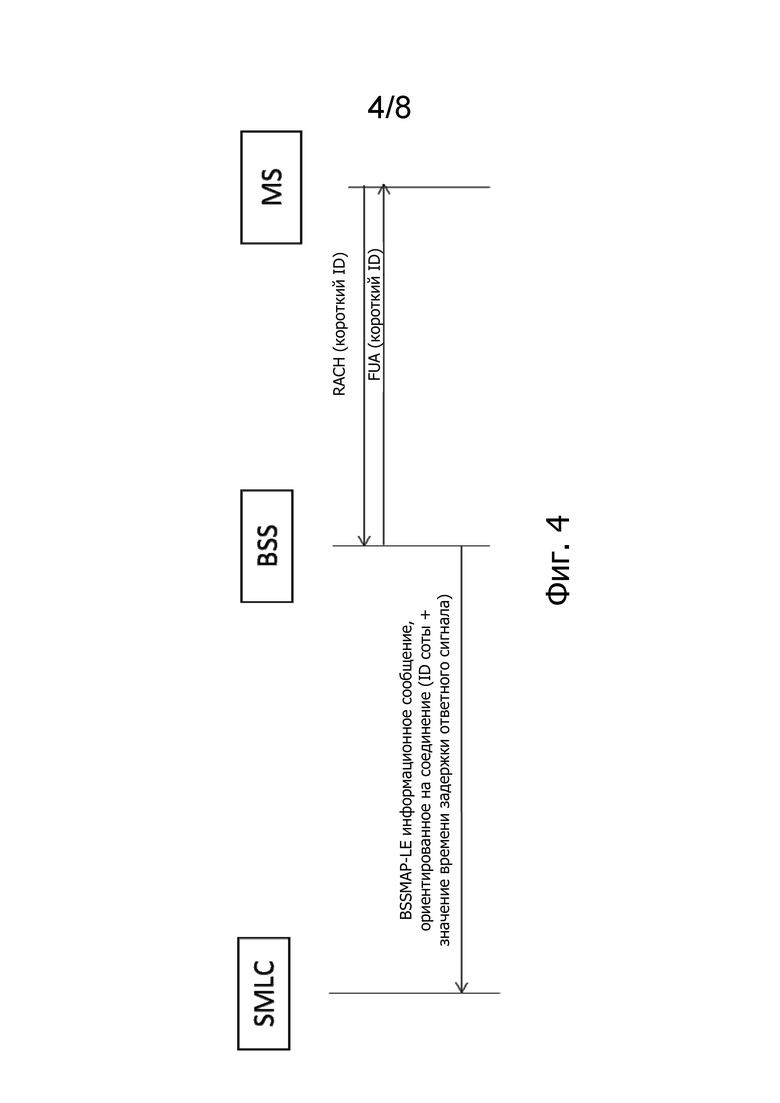
На фиг. 4 показана пакетная передача доступа без установления соединения для процедуры оценки TA для определения значения времени задержки ответного сигнала и отправки его в SMLC узел для обслуживающей BSS и EC-GSM-IoT поддержки устройства, показанного как MS. В настоящем документе сообщение с фиксированным распределением восходящей линии связи (FUA) используют для подтверждения приема канала произвольного доступа (RACH), содержащего короткий идентификатор, но не назначает MS никаких радиоресурсов (поскольку, в этом случае, MS не отправляет блок данных RLC).
Следует отметить, что фактическая оценка значения времени задержки ответного сигнала выполняется BTS и может выполняться с использованием только пакета доступа в первом RACH сообщении или дополнительно уточняться с использованием также одного или нескольких из четырех обычных пакетов, используемых для отправки RLC блока данных, переносящий TLLI по радиоресурсам восходящей линии связи, назначенным FUA сообщением.
Некоторые недостатки способов, как описано выше, то есть, способа с поддержкой сети и автономного способа MS, заключаются в том, что:
(a) для способа с поддержкой сети потребление энергии излишне велико из-за требования отправить отчет об измерениях в сеть, то есть, RRLP сообщение, отправленное из MS в обслуживающий SMLC в ответ на RRLP, отправленный в MS для запуска мультилатерация, и
(b) для автономного способа MS точность позиционирования может быть не такой точной, как у способа с поддержкой сети, поскольку MS не знает о геометрии соты (например, она не знает, какие соты располагаются совместно) и поэтому может предоставить SMLC меньше полезной информации при использовании автономного способа MS.
Для повышения точности по сравнению с автономным способом MS, а также для снижения потерь энергии MS, ассоциированное со способом с поддержкой сети, предлагают способы в устройстве 110 беспроводной связи и узле определения местоположения, как описано в данном документе. Варианты осуществления в данном документе иногда могут упоминаться как способ «MS с автономным сетевым управлением мультилатерации» или взаимозаменяемо «Процедура мультилатерации».
Варианты осуществления в данном документе предлагают один или несколько из следующих признаков:
• сеть предоставляет MS информацию в инициирующем сообщении запроса мультилатерации RRLP, которое указывает набор сот, которые MS может использовать при выполнении способа «MS с автономным сетевым управлением мультилатерации»,
• информация может включать в себя указание того, какие кандидаты сот размещены совместно или совмещены, что позволяет MS избегать включения в состав совместно размещенных сот в набор сот, которые она выбирает для выполнения способа «MS с автономным сетевым управлением мультилатерации»; это позволяет отправлять RRLP сообщение, которое идентифицирует 1) набор сот, которые MS может использовать (т.е. соты, которые не размещены совместно, если не указано иное) и, возможно, 2) один или несколько наборов совмещенных сот, в котором каждый набор идентифицирует соты, которые не размещены совместно с обслуживающей сотой (т.е., сотой, в которой MS принимает команду на выполнение процедуры позиционирования, используя способ «MS с автономным сетевым управлением мультилатерации») и, возможно, 3) один набор из совместно расположенных сот, идентифицирующий соты, которые совмещены с обслуживающей сотой.
• MS обладает полной автономией в отношении набора сот, который следует использовать при инициировании выполнения способа «MS с автономным сетевым управлением мультилатерации» (т.е. могут использовать комбинацию сот, которые идентифицируют независимо, чтобы быть полезной для определения местоположения, а также любое подмножество сот, идентифицируемое информацией, принятой в сообщении запроса мультилатерации RRLP).
• MS не отправляет RRLP сообщение в ответ на прием RRLP сообщения, отправленного обслуживающим SMLC, чтобы инициировать этот новый способ мультилатерации.
• MS передает блок данных RLC в каждой соте, которую выбирают для использования в этом новом способе мультилатерации (т.е. в дополнение к запросу доступа, отправляют по RACH или EC-RACH), если иное не указано информацией, предоставленной в RRLP сообщении, отправленным обслуживающим SMLC для инициирования этого нового способа мультилатерации, и
• Информация может включать в себя короткий идентификатор и список сот, в которых может использоваться короткий идентификатор, что позволяет MS пропускать передачу блока данных RLC в этих сотах, что приводит к экономии энергии батареи.
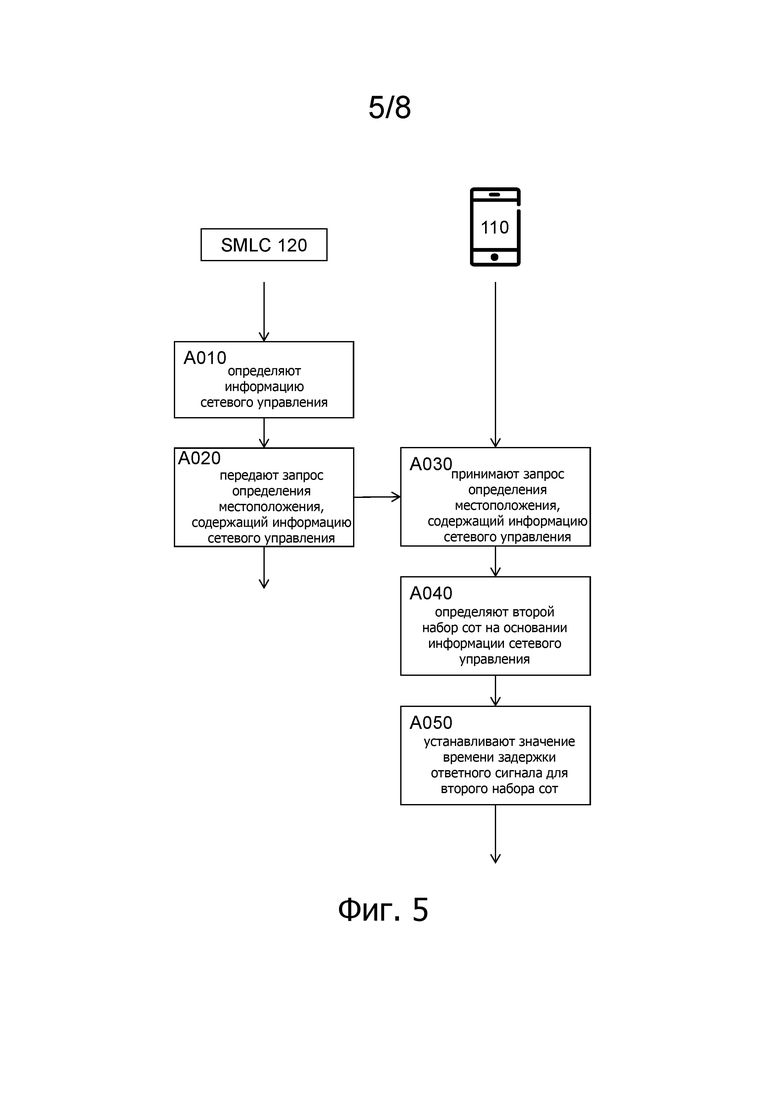
Фиг. 5 иллюстрирует примерный способ в соответствии с вариантами осуществления, приведенными в данном документе, при реализации в сети 100 по фиг. 1.
Устройство 110 беспроводной связи выполняет способ для управления запросом местоположения, относящимся к оценке местоположения устройства 110 беспроводной связи, посредством мультилатерации в сотовой сети 100, содержащей соты. Узел 120 определения местоположения выполняет способ для управления запросом определения местоположения, относящимся к оценке местоположения устройства 110 беспроводной связи, посредством мультилатерации в сотовой сети 100.
После краткого описания действий предоставляют изложения подробных примеров некоторых примерных вариантов осуществления, относящихся к информации. Данная информация может упоминаться как информация управления сетью.
Одно или несколько из следующих действий могут быть выполнены в любом подходящем порядке.
Действие A010
Узел 120 определения местоположения определяет информацию, в котором информация указывает первый набор сот, используемых устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала.
Информация может указывать, какие соты первого набора сот расположены совместно.
Действие A020
Узел 120 определения местоположения отправляет запрос местоположения (RRLP сообщение), содержащий запрос на выполнение процедуры определения местоположения, используя способ и информацию «MS с автономным сетевым управлением мильтилатерации» и информацию, в устройство 110 беспроводной связи.
Данное действие и действие A030 ниже могут быть аналогичны этапу 3 на фиг. 2, но следует отметить, что запрос определения местоположения, как описано в действии A020, дополнительно содержит информацию по сравнению с запросом определения местоположения этапа 3.
Действие A030
Устройство 110 беспроводной связи принимает от узла 120 определения местоположения запрос определения местоположения, содержащий запрос на выполнение процедуры определения местоположения с использованием способа «MS с автономным сетевым управлением мультилатерации» и информации. Информация указывает первый набор сот, используемых устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала.
Действие A040
Устройство 110 беспроводной связи определяет второй набор сот на основании информации. Устройство 110 беспроводной связи также может определять любые дополнительные соты, для которых устройство 110 беспроводной связи определяет, что оно должно установить информацию времени задержки ответного сигнала для оценки своего местоположения. Это означает, что устройство 110 беспроводной связи определяет любые дополнительные соты, для которых должны быть установлены значения времени задержки ответного сигнала, например, полученные.
Второй набор сот может содержать, по меньшей мере, одну соту из первого набора сот. Второй набор сот также может содержать указанные любые дополнительные соты.
Действие A050
Устройство 110 беспроводной связи выполняет процедуру определения местоположения, используя способ «MS с автономный сетевым управлением мультилатерации» и, таким образом, позволяет сети устанавливать значения времени задержки ответного сигнала для второго набора сот.
Далее варианты осуществления в данном документе иллюстрируют примерными вариантами осуществления. Следует отметить, что эти варианты осуществления не являются взаимоисключающими. Компоненты из одного варианта осуществления могут быть по умолчанию использованы в другом варианте осуществления, и специалисту в данной области техники будет очевидно, как эти компоненты могут быть использованы в других примерных вариантах осуществления.
Варианты осуществления, приведенные ниже, будут проиллюстрированы с GSM/EDGE в качестве сети связи. Примером базовой сети будет SGSN, но обычно это может быть другой узел базовой сети, обслуживающий также устройство 110 связи. Например, для NB-IoT применимый узел базовой сети также может быть MME. Узел сети радиодоступа (узел контроллера) иллюстрируется с помощью BSS, и устройство 110 связи будет иллюстрироваться устройством беспроводной связи, иногда также упоминаемым как устройство. Узел позиционирования будет иллюстрироваться SMLC узлом, но может, например, для NB-IoT быть E-SMLC узлом.
В первом варианте осуществления задачу (то есть, повышение точности автономного способа MS, а также снижение потери энергии MS, связанной с сетевым способом) решают с использованием обслуживающей соты MS в качестве опорной, путем обеспечения предложенного RRLP сообщения запроса мильтилатерации, включающего в себя информацию. Сообщение предоставляет МС информацию о соседних сотах, которые могут безопасно быть использованы для выполнения процедуры определения местоположения с использованием способа «MS с автономным сетевым управлением мультилатерации» и указывает, какие соты расположены совместно. Данную задачу решают посредством: 1) группировки сот в наборах, в котором соты в каждом наборе не совмещены с обслуживающей сотой, но совмещены друг с другом, и MS может использовать только одну из сот в каждом наборе для процедуры мультилатерации (см. пример 1 ниже) и 2) группировки всех сот, которые расположены рядом с обслуживающей сотой. Таким образом, данные соты не используются МС во время мультилатерации.
См. пример ниже, где каждую соту идентифицируют с использованием абсолютного номера радиочастотного канала (ARFCN) и где предоставляют 3 соты в каждом из трех наборов. Использование ARCN предоставляется только в качестве примера, другие способы идентификации каждой соты известны в данной области техники. Например, набор 1 мог бы идентифицировать соты, которые расположены совместно с обслуживающей сотой, тогда как набор 2 и набор 3 могли бы идентифицировать соты, которые не совмещены с обслуживающей сотой, но совмещены друг с другом. Если набор 2 содержит только 1 соту, то MS будет знать, что она может безопасно использовать эту соту для выполнения процедуры определения местоположения/позиционирования.
Пример 1:
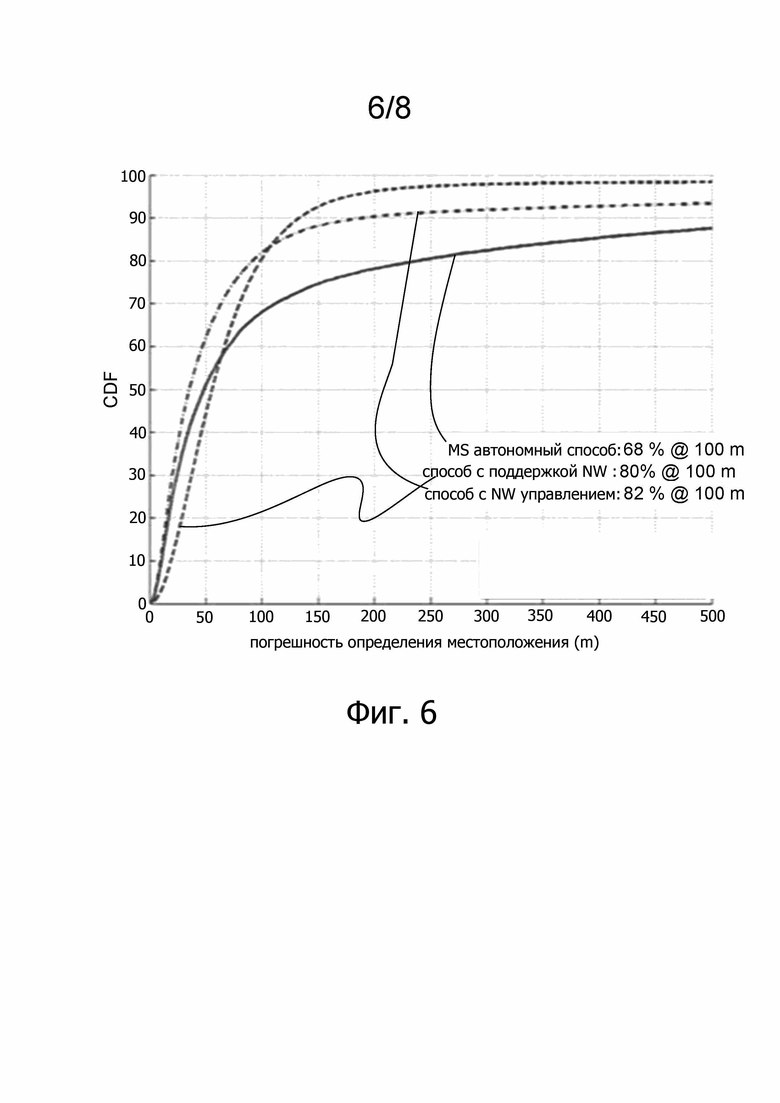
Преимущество состоит в том, что общее энергопотребление может быть снижено при сравнении со способом сетевой поддержки (как упомянуто в разделе «Уровень техники») и может быть повышена точность определения при сравнении с автономным способом MS, как показано на фиг. 6.
На фиг. 6 показаны смоделированные характеристики способа «автономный МС», способа «NW поддержки» и первого варианта способа «МС с автономным сетевым управлением». На чертеже показана функция накопительного распределения (CDF) ошибки позиционирования. Можно видеть, что техническая задача повышения точности по сравнению со способом «MS автономный» решена.
Во втором варианте осуществления задачу решают с использованием обслуживающей соты MS в качестве опорной путем обеспечения того, что предлагаемое RRLP сообщение запроса мультилатерации включает в себя дополнительную информацию, такую как короткий ID, а также указание, в каких наборах сот используют короткий идентификатор, см. пример 2. Это означает, что информация может содержать специфический для устройства идентификатор (называемый коротким идентификатором), который должен использоваться в запросах доступа, отправленных устройством 110 беспроводной связи в сетевой узел, в котором запрос доступа может использоваться сетевым узлом для оценки времени задержки ответного сигнала, и в котором каждый поднабор может содержать указание на то, разрешено или нет использование конкретного идентификатора устройства для сот упомянутого каждого поднабора. Специфичная идентификация устройства может быть специфической идентификацией устройства беспроводной связи, специфической идентификацией мобильной станции или тому подобным.
Это особенно полезно, когда набор сот принадлежит другой BSS, и когда MS должна передать идентификатор источника обслуживающей соты в BSS в блоке данных RLC восходящей линии связи, см. фиг. 3, чтобы необслуживающая BSS знала, где переслать расчетное значение времени задержки ответного сигнала. Другой сценарий, в котором это может быть полезно, представляет собой случай наличия аппаратных ограничений BTS, принадлежащие определенным наборам сот, которые требуют, чтобы MS также передавала блок данных RLC восходящей линии связи для BTS, для повышения точности оценки времени задержки ответного сигнала. В таких сценариях указание может быть необходимо на уровне соты, а не на уровне набора соты, как показано в примере.
Преимущество того, что SMLC узлу назначают короткий идентификатор в сообщении запроса мультилатерации RRLP, состоит в том, что данный аспект позволяет избежать модификаций существующих сообщений назначения/введения нового управляющего сообщения только для этой цели. Другое преимущество состоит в том, что SMLC может предоставлять необслуживающим BSS этот короткий ID (например, через обслуживающую BSS и модифицированную процедуру RIM с использованием PDU RAN-INFORMATION REQUEST).
Пример 2:
Кроме того, согласно второму варианту осуществления, путем предоставления информации в сообщении запроса мультилатерации RRLP, например, отправленный в MS для запуска процедуры определения местоположения, которая включает в себя короткий идентификатор, SMLC может эффективно указывать, что следует использовать дополнительную оптимизированную версию способа «MS с автономным сетевым управлением мультилатерации». В этом случае, MS назначают короткий идентификатор, который будет использован для выполнения способа «MS с автономным сетевым управлением мультилатерации», в котором MS использует короткий идентификатор в запросе доступа, отправленном по RACH/EC-RACH, и принимает подтверждение запроса доступа по AGCH. Это устраняет необходимость для MS отправлять блок данных RLC в каждую соту, которую решают использовать для выполнения способа «MS с автономным сетевым управлением мультилатерации», что приводит к снижению расхода энергии батареи.
В третьем варианте осуществления задачу решают с использованием обслуживающей соты MS в качестве опорной путем обеспечения, что предлагаемое сообщение запроса мультилатерации RRLP включает в себя дополнительную информацию, такую как указание качества обслуживания. Это означает, что информация может содержать указание на качество обслуживания, относящееся к оценке местоположения устройства 110 беспроводной связи.
Это полезно, когда сеть хочет указать MS желаемое качество обслуживания, которое будет служить руководством для MS при выборе сот для фактической процедуры мультилатерации (то есть, при определении второго набора сот, упомянутых в кратком изложении выше), см. пример ниже, где обслуживающий SMLC предоставляет 5 наборов сот и где поле качества обслуживания (QoS) может указывать, что для требуемой точности необходимы только три набора. Может быть так, что даже если 5 наборов сот предоставлены обслуживающим SMLC узлом, потери в тракте в определенном направлении являются значительными, так что MS не может получить доступ ни к одной из сот в данном наборе.
Пример 3:
В четвертом варианте осуществления задачу решают с использованием обслуживающей соты MS в качестве опорной посредством обеспечения того, что предлагаемое сообщение запроса мультилатерации RRLP включает в себя дополнительную информацию, такую как требуемая точность синхронизации MS. Это означает, что информация может содержать указание на точность синхронизации, требуемую для устройства 110 беспроводной связи при выполнении мультилатерации.
Это может быть полезно, когда сеть желает указать MS желаемую точность синхронизации, чтобы общая процедура соответствовала определенной точности позиционирования. Следует отметить, что точность синхронизации MS также может быть указана для каждого набора сот или уровня сот, например, когда требуется более высокая точность синхронизации MS, чтобы компенсировать более низкую точность в оценке времени задержки ответного сигнала BTS. Если MS определяет, что она не может реализовать указанную точность синхронизации, она может прервать процедуру мультилатерации и, в этом случае, она отправляет обслуживающему SMLC ответное сообщение RRLP, указывающее, что она не смогла выполнить запрошенную функцию позиционирования, и указывающее, что не в состоянии поддерживать точность синхронизации.
Пример 4:
В пятом варианте осуществления задачу решают с использованием обслуживающей соты MS в качестве опорной путем размещения дополнительной информации, которая должна быть включена в состав предлагаемого RRLP сообщение запроса на мультилатерацию, таким образом, чтобы MS могла оптимизировать выбор сот/наборы сот, идентифицированные управляющей информацией. Это означает, что подмножества каждого набора могут быть расположены в таком порядке, что первое подмножество в определенной позиции первого набора, например, подмножество 2 первого набора, как показано ниже, соответствует второму подмножеству в той же позиции, то есть в определенной позиции во втором наборе, например, подмножество 2 второго набора, как показано ниже.
Выраженное по-разному в отношении первого набора сот, упомянутого в действии A010, первый набор сот может содержать подмножества сот, как уже упоминалось. Затем, согласно пятому варианту осуществления, подмножества первого набора могут быть упорядочены во множество групп, где подмножества в каждой группе могут быть упорядочены таким образом, чтобы первый поднабор в первой позиции первой группы соответствовал второму подмножеству в той же первой позиции второй группы, где множество групп содержит первую и вторую группы.
Это может, например, достигается путем группировки трех поднаборов в каждом наборе таким образом, чтобы, если по какой-либо причине ни одна из сот в подмножестве 1 первого набора из трех не могла использоваться MS, тогда MS знает, что соты 10, 11 или 12 в подмножестве 1 следующего набора из трех подмножеств сот можно использовать в качестве замены.
Пример:
Первый набор из трех подмножеств сот
1,2,3 (подмножество 1)
4,5,6 (подмножество 2)
7,8,9 (подмножество 3)
Второй набор из трех подмножеств сот
10,11,12 (подмножество 1)
13,14,15 (подмножество 2)
15,17,18 (подмножество 3)
Предположим, что сота в наборах, указанных выше, географически расположена так, что, если MS выбирает одну соту в каждом подмножестве первого набора. Например, соты 1, 5 и 9, тогда SMLC узел сможет определить местоположение с достаточной точностью.
Однако, если MS не может прочитать ни одну из сот в подмножестве 2, то есть, соты 4,5,6, то ей необходимо выбрать одну дополнительную соту из второго набора из трех подмножеств сот. Если они не упорядочены по отношению к первому набору, то MS не знает, какой из них попробовать/использовать. Это может, например, быть так, чтобы набор, состоящий из 10, 11 и 12, был более или менее в том же направлении, что и набор, состоящий из 1, 2 и 3, подразумевая, что выбор одной из этих сот почти так же плох, как и выбор соседней соты. Вместо этого, было бы предпочтительно при подходящем упорядочении выбрать соту из числа сот 13, 14, 15 (то есть, подмножества 2, который находится в том же упорядоченном подмножестве, что и сота 4 первого набора).
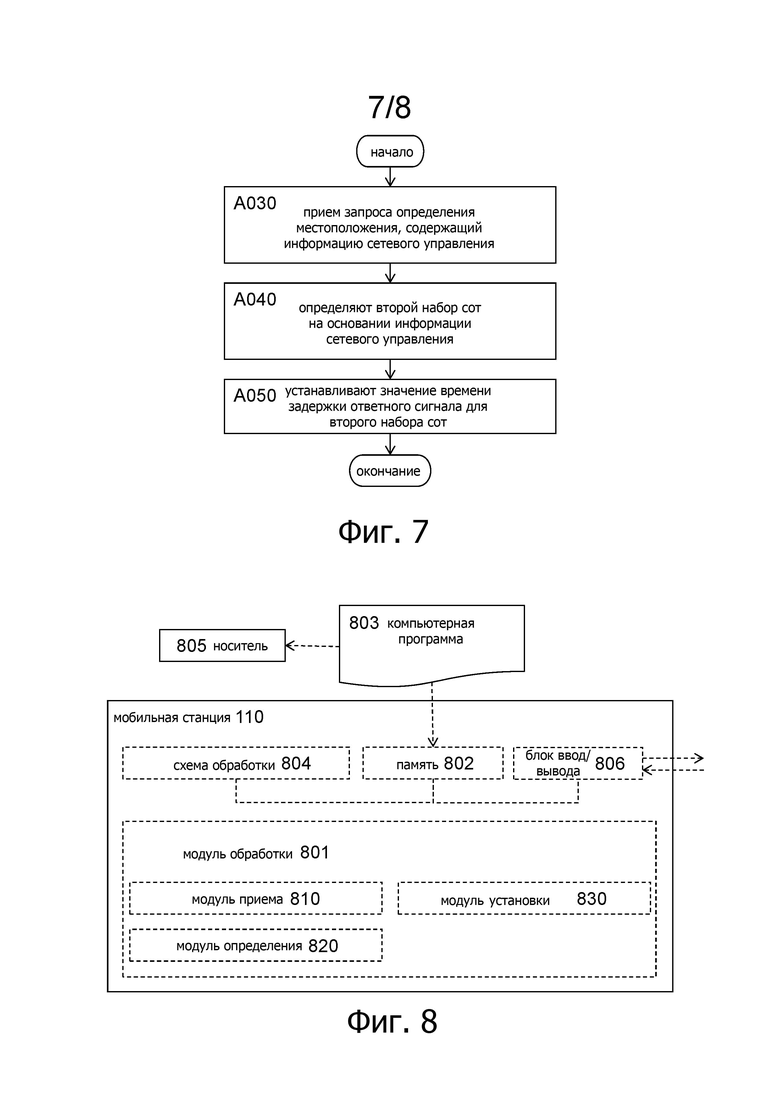
На фиг. 7 показана блок-схема последовательности операций примеров способов в устройстве 110 беспроводной связи. Опять же, те же ссылочные позиции, что и выше, были использованы для обозначения одинаковых или сходных признаков, в частности, те же ссылочные позиции были использованы для обозначения одинаковых или аналогичных действий. Соответственно, устройство 110 беспроводной связи выполняет способ для управления запросом определения местоположения.
Как упомянуто, второй набор сот может содержать, по меньшей мере, одну соту из первого набора сот. Информация может указывать, какие соты первого набора сот расположены совместно. Первый набор сот может содержать подмножества сот, причем одно подмножество может содержать соты, которые совмещены с обслуживающей сотой и дополнительные подмножества могут содержать соты, которые не совмещены с обслуживающей сотой, но совмещены с другими сотами в этом наборе. Информация может содержать специфическую для устройства идентификацию, которая будет использоваться в запросах доступа, отправленных устройством 110 беспроводной связи на сетевой узел, где сетевой запрос может использоваться сетевым узлом для оценки времени задержки ответного сигнала, и где каждое подмножество может содержать указание на то, разрешено ли использование идентификации для сот каждого указанного подмножества. Информация может содержать указание на качество обслуживания, относящееся к оценке местоположения устройства 110 беспроводной связи. Информация может содержать указание на точность синхронизации, требуемую для устройства 110 беспроводной связи при выполнении мультилатерации.
Одно или несколько из следующих действий могут быть выполнены в любом подходящем порядке.
Действие A030
Устройство 110 беспроводной связи принимает от узла 120 местоположения запрос местоположения, содержащий информацию. Информация указывает первый набор сот, используемых устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала.
Действие A040
Устройство 110 беспроводной связи определяет второй набор сот на основании информации.
Второй набор сот может содержать, по меньшей мере, одну соту из первого набора сот.
Действие A050
Устройство 110 беспроводной связи выполняет способ для управления запросом местоположения, используя второй набор сот, тем самым, позволяя сети устанавливать значения времени задержки ответного сигнала для второго набора сот.
Со ссылкой на фиг. 8 показана блок-схема вариантов осуществления устройства 110 беспроводной связи по фиг. 1.
Устройство 110 беспроводной связи может содержать модуль 801 обработки, такой как средство для выполнения способов, описанных в данном документе. Средство может быть реализовано в форме одного или нескольких аппаратных модулей и/или одного или нескольких программных модулей.
Устройство 110 беспроводной связи может дополнительно содержать память 802. Память может содержать, например, содержать или хранить инструкции, например, в форме компьютерной программы 803, которая может содержать машиночитаемые кодовые блоки.
В соответствии с некоторыми вариантами осуществления настоящего изобретения устройство 110 беспроводной связи и/или модуль 801 обработки содержит схему 804 обработки в качестве примера аппаратного модуля, который может содержать один или несколько процессоров. Соответственно, модуль 801 обработки может быть воплощен в форме или «реализован» схемой 804 обработки. Инструкции могут быть выполнены схемой 804 обработки, посредством чего устройство 110 беспроводной связи функционирует для выполнения способов по фиг. 5 и/или фиг. 7. В качестве другого примера, инструкции, когда они выполняются устройством 110 беспроводной связи и/или схемой 804 обработки, могут вызывать устройство 110 беспроводной связи выполнять способ в соответствии с фиг. 5 и/или 7.
Ввиду вышесказанного, в одном примере предоставляют устройство 110 беспроводной связи для управления запросом местоположения. Опять же, память 802 содержит инструкции, исполняемые упомянутой схемой 804 обработки, посредством чего устройство 110 беспроводной связи выполнено с возможностью:
принимать из узла 120 местоположения запрос местоположения, включающий в себя информацию, в котором информация указывает первый набор сот, используемый устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала,
определять второго набора сот на основе информации и
выполнять способ управления запросом местоположения в соответствии с принятым запросом местоположения, используя второй набор сот, тем самым, позволяя сети устанавливать значения времени задержки ответного сигнала для второго набора сот.
Фиг. 8 дополнительно иллюстрирует носитель 805 или носитель программ, который содержит компьютерную программу 803, как описано непосредственно выше.
В некоторых вариантах осуществления устройство 110 беспроводной связи и/или модуль 801 обработки может содержать один или несколько модуль 810 приема, модуль 820 определения и модуль 830 установления в качестве примеров аппаратных модулей. В других примерах один или несколько вышеупомянутых примерных аппаратных модулей могут быть реализованы в виде одного или нескольких программных модулей.
Кроме того, модуль 801 обработки содержит модуль 806 ввода/вывода, примером которого может быть модуль приема и/или модуль отправки, как описано, когда это применимо.
Соответственно, устройство 110 беспроводной связи выполнено с возможностью управлять запросом местоположения, относящимся к оценке местоположения устройства 110 беспроводной связи, посредством мультилатерации в сотовой сети 100, содержащей соты.
Следовательно, в соответствии с различными вариантами осуществления, описанными выше, устройство 110 беспроводной связи и/или модуль 801 обработки и/или модуль 810 приема выполнены с возможностью принимать из узла 120 определения местоположения запроса местоположения, включающая в себя информацию, в которой информация указывает первый набор сот, используемых устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала.
Кроме того, устройство 110 беспроводной связи и/или модуль 801 обработки и/или модуль 820 определения выполнены с возможностью определять второй набор сот на основании информации.
Дополнительно, устройство 110 беспроводной связи и/или модуль 801 обработки и/или модуль 830 установления выполнен с возможностью выполнять способ управления запросом определения местоположения в соответствии с принятым запросом определения местоположения, используя определенный второй набор сот, тем самым, позволяя сети установить значения времени задержки ответного сигнала для второго набора сот.
Как упомянуто, второй набор сот может содержать, по меньшей мере, одну соту из первого набора сот. Информация может указывать, какие соты первого набора сот расположены совместно. Первый набор сот может содержать подмножества сот, причем каждое подмножество может содержать соты, которые расположены совместно. Информация может содержать специфическую для устройства идентификацию, которая будет использоваться в запросах доступа, отправленных устройством 110 беспроводной связи на сетевой узел, в котором сетевой запрос может использоваться сетевым узлом для оценки времени задержки ответного сигнала, и где каждое подмножество может содержать указание на то, разрешено ли использование идентификации для сот каждого указанного подмножества. Информация может содержать указание на качество обслуживания, относящееся к оценке местоположения устройства 110 беспроводной связи. Информация может содержать указание на точность синхронизации, требуемую для устройства 110 беспроводной связи при выполнении мультилатерации.
Кроме того, как упомянуто, устройство 110 беспроводной связи и/или модуль 801 обработки и/или модуль 802 определения могут быть выполнены с возможностью определять второй набор сот путем определения любых дополнительных сот, для которых должны быть установлены значения времени задержки ответного сигнала.
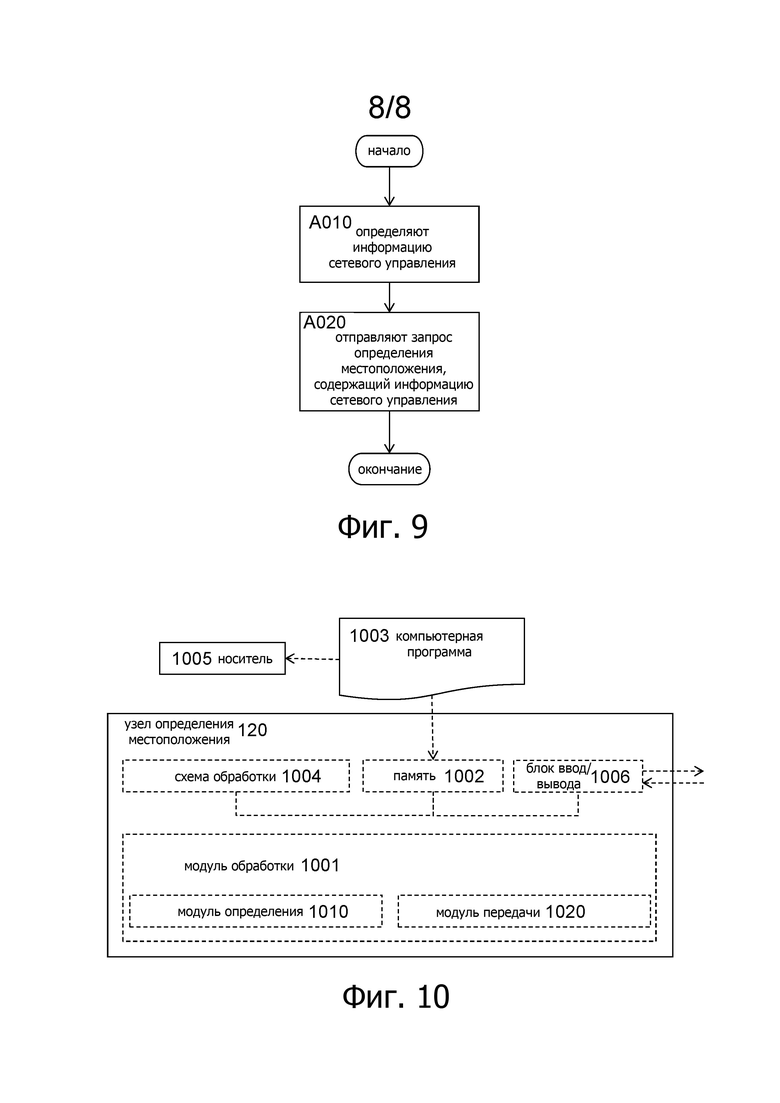
На фиг. 9 показана блок-схема последовательности операций примерных способов в узле 120 определения местоположения. Опять же, те же ссылочные позиции, что и выше, были использованы для обозначения одинаковых или сходных признаков, в частности, те же ссылочные позиции были использованы для обозначения одинаковых или аналогичных действий. Соответственно, узел 120 определения местоположения выполняет способ для управления запросом определения местоположения.
Как упомянуто, второй набор сот может содержать, по меньшей мере, одну соту из первого набора сот. Информация может указывать, какие соты первого набора сот расположены совместно. Первый набор сот может содержать подмножества сот, причем каждое подмножество может содержать соты, которые расположены совместно. Информация может содержать специфическую для устройства идентификацию, которая будет использоваться в запросах доступа, отправленных устройством 110 беспроводной связи на сетевой узел, где сетевой запрос может использоваться сетевым узлом для оценки времени задержки ответного сигнала, и где каждое подмножество может содержать указание на то, разрешено ли использование идентификации для сот каждого указанного подмножества. Информация может содержать указание на качество обслуживания, относящееся к оценке местоположения устройства 110 беспроводной связи. Информация может содержать указание на точность синхронизации, требуемую для устройства 110 беспроводной связи при выполнении мультилатерации.
Одно или несколько из следующих действий могут быть выполнены в любом подходящем порядке.
Действие A010
Узел 120 определения местоположения определяет информацию, причем информация указывает первый набор сот, используемых устройством 110 беспроводной связи при выполнении процедуры определения местоположения, которая позволяет сети устанавливать значения времени задержки ответного сигнала.
Информация может указывать, какие соты первого набора сот расположены совместно.
Действие A020
Узел 120 местоположения отправляет запрос местоположения, содержащий информацию, в устройство 110 беспроводной связи.
Со ссылкой на фиг. 10 показана схематическая блок-схема вариантов осуществления узла 120 определения местоположения по фиг. 1.
Узел 120 определения местоположения может содержать модуль 1001 обработки, такой как средство для выполнения способов, описанных в данном документе. Средство может быть реализовано в форме одного или нескольких аппаратных модулей и/или одного или нескольких программных модулей.
Узел 120 определения местоположения может дополнительно содержать память 1002. Память может содержать, например, или хранить инструкции, например, в форме компьютерной программы 1003, которая может содержать машиночитаемые кодовые блоки.
Согласно некоторым вариантам осуществления в данном документе узел 120 определения местоположения и/или модуль 1001 обработки содержат схему 1004 обработки в качестве примера аппаратного модуля. Соответственно, модуль 1001 обработки может быть реализован в форме или «осуществлен» схемой 1004 обработки. Инструкции могут быть выполнены схемой 1004 обработки, посредством чего узел 120 определения местоположения действует для выполнения способов по фиг. 5 и/или фиг. 9. В качестве другого примера, инструкции, когда выполняются узлом 120 местоположения и/или схемой 1004 обработки, могут вызывать узел 120 местоположения выполнять способ в соответствии с фиг. 5 и/или фиг. 9.
Ввиду вышесказанного, в одном примере предоставляется узел 120 определения местоположения для управления запросом определения местоположения, относящимся к оценке местоположения устройства 110 беспроводной связи, посредством мультилатерации в сотовой сети 100, содержащей соты. Опять же, память 1002 содержит команды, исполняемые упомянутой схемой 1004 обработки, посредством чего узел 120 определения местоположения выполнен с возможностью:
определять информацию, в котором информация указывает первый набор сот, используемых устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала; и
отправлять в устройство 110 беспроводной связи запрос местоположения, включающий в себя информацию.
Фиг. 10 дополнительно иллюстрирует носитель 1005 или носитель программ, который содержит компьютерную программу 1003, как описано непосредственно выше.
В некоторых вариантах осуществления модуль 1001 обработки содержит модуль 1006 ввода/вывода, примером которого может быть модуль приема и/или модуль отправки, как описано ниже, когда это применимо.
В других вариантах осуществления узел 120 определения местоположения и/или модуль 1001 обработки могут содержать один или несколько из модуля 1010 определения и модуль 1020 отправки в качестве примеров аппаратных модулей. В других примерах один или несколько вышеупомянутых примерных аппаратных модулей могут быть реализованы в виде одного или нескольких программных модулей.
Соответственно, узел 120 определения местоположения выполнен с возможностью управлять запросом определения местоположения, относящимся к оценке местоположения устройства 110 беспроводной связи, посредством мультилатерации в сотовой сети 100, содержащей соты.
Следовательно, в соответствии с различными вариантами осуществления, описанными выше, узел 120 определения местоположения и/или модуль 1001 обработки и/или модуль 1010 определения выполнены с возможностью определять информацию, в котором информация указывает первый набор сот, используемых устройством 110 беспроводной связи при установлении значений времени задержки ответного сигнала.
Кроме того, узел 120 определения местоположения и/или модуль 1001 обработки и/или модуль 1020 отправки выполнены с возможностью отправлять в устройство 110 беспроводной связи запрос местоположения, включающий в себя информацию.
Как упомянуто, второй набор сот может содержать, по меньшей мере, одну соту из первого набора сот. Информация может указывать, какие соты первого набора сот расположены совместно. Первый набор сот может содержать подмножества сот, причем каждое подмножество может содержать соты, которые расположены совместно. Информация может содержать специфическую для устройства идентификацию, которая будет использоваться в запросах доступа, отправленных устройством 110 беспроводной связи на сетевой узел, где сетевой запрос может использоваться сетевым узлом для оценки времени задержки ответного сигнала, и в котором каждое подмножество может содержать указание на то, разрешено ли использование идентификации для сот каждого упомянутого подмножества. Информация может содержать указание на качество обслуживания, относящееся к оценке местоположения устройства 110 беспроводной связи. Информация может содержать указание на точность синхронизации, требуемую для устройства 110 беспроводной связи при выполнении мультилатерации.
Используемый в настоящем документе термин «узел» или «сетевой узел» может относиться к одному или нескольким физическим объектам, таким как устройства, приспособления, компьютеры, серверы или тому подобное. Это может означать, что варианты осуществления в данном документе могут быть реализованы в одном физическом объекте. Альтернативно, варианты осуществления в данном документе могут быть реализованы во множестве физических объектов, таких как устройство, содержащее упомянутые один или несколько физических объектов, то есть, варианты осуществления могут быть реализованы распределенным способом, например, на множестве серверных машин облачной системы.
Используемый в настоящем документе термин «модуль» может относиться к одному или нескольким функциональным модулям, каждый из которых может быть реализован в виде одного или нескольких аппаратных модулей и/или одного или нескольких программных модулей и/или объединенного программно-аппаратного модуля в узле. В некоторых примерах модуль может представлять собой функциональный блок, реализованный в виде программного и/или аппаратного обеспечения узла.
Используемый здесь термин «носитель компьютерной программы», «носитель программы» или «носитель» может относиться к одному из электронному сигналу, оптическому сигналу, радиосигналу и машиночитаемому носителю. В некоторых примерах носитель компьютерной программы может не включать в себя временные, распространяющиеся сигналы, такие как электронный, оптический и/или радиосигнал. Таким образом, в этих примерах носитель компьютерной программы может быть постоянным носителем, таким как постоянный машиночитаемый носитель.
Используемый в настоящем документе термин «модуль обработки» может включать в себя один или несколько аппаратных модулей, один или несколько программных модулей или их комбинацию. Любой такой модуль, будь то аппаратный, программный или комбинированный аппаратно-программный модуль, может быть средством определения, средством оценки, средством получения, средством ассоциации, средством сравнения, средством идентификации, средством выбора, средством приема, средством отправки или тому подобным как раскрыто в настоящем документе. В качестве примера выражение «средство» может быть модулем, соответствующим модулям, перечисленным выше согласно чертежам.
Используемый в настоящем документе термин «программный модуль» может относиться к программному приложению, библиотеке динамической компоновки (DLL), программному компоненту, программному объекту, объекту в соответствии с объектной моделью компонентов (COM), программному компоненту, программной функции, программному механизму, исполняемому двоичному файлу программного обеспечения или тому подобное.
Термины «модуль обработки» или «схема обработки» могут в данном документе охватывать модуль обработки, содержащий, например, один или несколько процессоров, специализированную интегральную схему (ASIC), программируемую пользователем матрица логических элементов (FPGA) или тому подобное. Схема обработки или тому подобное может содержать одно или несколько процессорных ядер.
Как используется в данном документе, выражение «выполнен с возможностью» может означать, что схема обработки сконфигурирована, например, адаптирована или работает посредством конфигурации программного обеспечения и/или конфигурации оборудования, для выполнения одного или нескольких действий, описанных в данном документе.
Используемый в настоящем документе термин «действие» может относиться к действию, этапу, операции, ответу, реакции, активности или тому подобному. Следует отметить, что действие в данном документе может быть разделено на два или более подэтапа, в зависимости от обстоятельств. Кроме того, также, в зависимости от обстоятельств, следует отметить, что два или более действий, описанных в данном документе, могут быть объединены в одно действие
Используемый здесь термин «память» может относиться к жесткому диску, магнитному носителю данных, дискете или диску портативного компьютера, флэш-памяти, оперативной памяти (RAM) и т.п. Кроме того, термин «память» может относиться к памяти внутреннего регистра процессора или тому подобного.
Используемый здесь термин «машиночитаемый носитель» может представлять собой память универсальной последовательной шины (USB), DVD-диск, диск Blu-ray, программный модуль, который принимают как поток данных, флэш-память, жесткий диск, карта памяти, такая как MemoryStick, мультимедийная карта (MMC), карта Secure Digital (SD) и т.д. Один или несколько из вышеупомянутых примеров машиночитаемого носителя могут быть предоставлены в качестве одного или нескольких компьютерных программных продуктов.
Используемый здесь термин «машиночитаемые кодовые блоки» может быть текстом компьютерной программы, частями или целым двоичным файлом, представляющим компьютерную программу в скомпилированном формате, или чем-либо между ними.
Используемые здесь выражения «передача» и «отправка» считаются взаимозаменяемыми. Эти выражения включают в себя передачу посредством широковещательной передачи, одноадресной передачи, групповой трансляции и т.п. В этом контексте передача посредством широковещательной передачи может быть принята и декодирована любым авторизованным устройством в пределах диапазона. В случае одноадресной передачи одно специально адресованное устройство может принимать и декодировать передачу. В случае группового трансляции группа специально адресованных устройств может принимать и декодировать передачу.
Используемые здесь термины «количество» и/или «значение» могут представлять собой любой тип цифры, такой как двоичное, действительное, мнимое или рациональное число, или тому подобное. Кроме того, «количество» и/или «значение» могут быть одним или несколькими символами, такими как буква или строка букв. «Количество» и/или «значение» также могут быть представлены битовой строкой, то есть, нулей и/или единиц.
Используемый в настоящем документе термин «набор» может относиться к одному или нескольким элементам. Например, набор устройств может относиться к одному или нескольким устройствам, набор параметров может относиться к одному или нескольким параметрам, или тому подобному согласно вариантам осуществления, приведенным в данном документе.
Как используется в данном документе, выражение «в некоторых вариантах осуществления» использовалось для указания того, что признаки описанного варианта осуществления могут быть объединены с любым другим вариантом осуществления, раскрытым в данном документе.
Даже если были описаны варианты осуществления различных аспектов, для специалистов в данной области техники станут очевидными многие различные изменения, модификации и тому подобное. Поэтому описанные варианты осуществления не предназначены для ограничения объема настоящего изобретения.
Изобретение относится к мобильной связи. Способ и узел определения местоположения управляет запросом определения местоположения, относящимся к оценке местоположения. Узел определения местоположения определяет информацию, указывающую первый набор сот, используемых устройством беспроводной связи при установке значений времени задержки ответного сигнала, и передает устройству беспроводной связи запрос определения местоположения, включающий в себя информацию, указывающую первый набор сот, используемых устройством беспроводной связи при установке значений времени задержки ответного сигнала. Устройство беспроводной связи определяет второй набор сот на основании информации и выполняет процедуру мультилатерации с использованием второго набора сот, тем самым, позволяя сети устанавливать значения времени задержки ответного сигнала для второго набора сот. Технический результат заключается в повышении производительности сотовой сети. 6 н. и 18 з.п. ф-лы, 10 ил.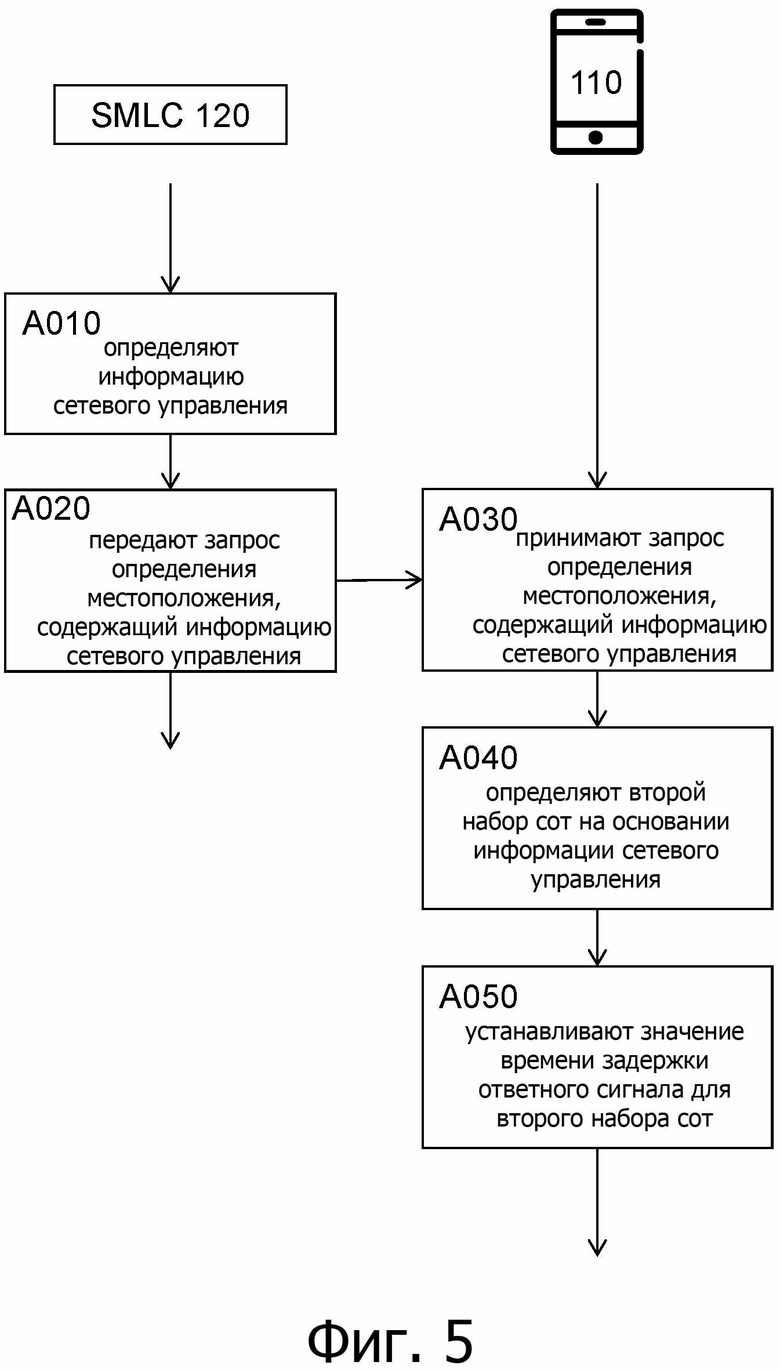
1. Способ, реализуемый устройством (110) беспроводной связи, для управления запросом определения местоположения, относящимся к оценке местоположения устройства (110) беспроводной связи, посредством мультилатерации в сотовой сети (100), содержащей соты, содержащий этапы, на которых:
принимают (A030) от узла (120) определения местоположения запрос определения местоположения, включающий в себя информацию, указывающую первый набор сот, используемых устройством (110) беспроводной связи при установлении значений времени задержки,
определяют (A040) второй набор сот на основании информации, и
устанавливают (A050) значения времени задержки для второго набора сот.
2. Способ по п. 1, в котором этап определения второго набора сот содержит подэтап, на котором определяют любые дополнительные соты, для которых подлежат установке значения времени задержки.
3. Способ по п. 1 или 2, в котором информация указывает, какие соты из первого набора сот расположены совместно.
4. Способ по любому из пп. 1-3, в котором первый набор сот содержит поднаборы сот, причем один поднабор содержит соты, расположенные совместно с обслуживающей сотой, а все другие поднаборы содержат соты, не расположенные совместно с обслуживающей сотой, но размещенные совместно с другими сотами в указанном наборе.
5. Способ по п. 4, в котором информация содержит идентификацию конкретного устройства, подлежащую использованию в запросах доступа, переданных устройством (110) беспроводной связи сетевому узлу, причем запрос доступа используется сетевым узлом для оценки времени задержки, при этом каждый поднабор содержит указание о том, разрешено или нет использование идентификации для сот упомянутого каждого поднабора.
6. Способ по любому из пп. 1-5, в котором информация содержит указание качества обслуживания, относящееся к оценке местоположения устройства (110) беспроводной связи.
7. Способ, реализуемый узлом (120) определения местоположения, для управления запросом определения местоположения, относящимся к оценке местоположения устройства (110) беспроводной связи, посредством мультилатерации в сотовой сети (100), содержащей соты, содержащий этапы, на которых:
определяют (A010) информацию, указывающую первый набор сот, используемых устройством (110) беспроводной связи при установлении значений времени задержки; и
передают (A020) на устройство (110) беспроводной связи запрос определения местоположения, включающий в себя информацию.
8. Способ по п. 7, в котором информация указывает, какие соты из первого набора сот расположены совместно.
9. Способ по п. 7 или 8, в котором первый набор сот содержит поднаборы сот, при этом один поднабор содержит соты, расположенные совместно с обслуживающей сотой, а все другие поднаборы содержат соты не расположенные совместно с обслуживающей сотой, но расположенные совместно с другими сотами в указанном наборе.
10. Способ по п. 8 или 9, в котором информация содержит идентификацию конкретного устройства, подлежащую использованию в запросах доступа, переданных устройством (110) беспроводной связи сетевому узлу, при этом запрос доступа используется сетевым узлом для оценки времени задержки, а каждый поднабор содержит указание о том, разрешено ли использование идентификации для сот упомянутого каждого поднабора.
11. Способ по любому из пп. 7-10, в котором информация содержит указание качества обслуживания, относящееся к оценке местоположения устройства (110) беспроводной связи.
12. Машиночитаемый носитель, хранящий компьютерную программу, содержащую машиночитаемые блоки кода, вызывающие при исполнении устройством (110) беспроводной связи выполнение устройством (110) беспроводной связи способа по любому из пп. 1-6.
13. Машиночитаемый носитель, хранящий компьютерную программу, содержащую машиночитаемые блоки кода, вызывающие при исполнении устройством (110) беспроводной связи выполнение устройством (110) беспроводной связи способа по любому из пп. 7-11.
14. Устройство (110) беспроводной связи, характеризующееся тем, что выполнено с возможностью управления запросом определения местоположения, относящимся к оценке местоположения устройства (110) беспроводной связи, посредством мультилатерации в сотовой сети (100), содержащей соты, при этом устройство (110) беспроводной связи выполнено с возможностью:
приема от узла (120) определения местоположения запроса определения местоположения, включающего в себя информацию, указывающую первый набор сот, используемых устройством (110) беспроводной связи для установки значений времени задержки,
определения второго набора сот на основании информации, и
установки значений времени задержки для второго набора сот.
15. Устройство (110) беспроводной связи по п. 14, характеризующееся тем, что выполнено с возможностью определения второго набора сот посредством определения любых дополнительных сот, для которых подлежат установке значения времени задержки.
16. Устройство (110) беспроводной связи по п. 14 или 15, в котором информация указывает, какие соты из первого набора сот расположены совместно.
17. Устройство (110) беспроводной связи по любому из пп. 14-16, в котором первый набор сот содержит поднаборы сот, причем один поднабор содержит соты, расположенные совместно с обслуживающей сотой, а все другие поднаборы содержат соты, не расположенные совместно с обслуживающей сотой, но расположенные совместно с другими сотами в указанном наборе.
18. Устройство (110) беспроводной связи по п. 17, в котором информация содержит идентификацию конкретного устройства, подлежащую использованию в запросах доступа, переданных устройством (110) беспроводной связи сетевому узлу, при этом запрос доступа используется сетевым узлом для оценки времени задержки, а каждый поднабор содержит указание о том, разрешено или нет использование идентификации для сот упомянутого каждого поднабора.
19. Устройство (110) беспроводной связи по любому из пп. 14-18, в котором информация содержит указание качества обслуживания, относящееся к оценке местоположения устройства (110) беспроводной связи.
20. Узел (120) определения местоположения, характеризующийся тем, что выполнен с возможностью управления запросом определения местоположения, относящимся к оценке местоположения устройства (110) беспроводной связи посредством мультилатерации в сотовой сети (100), содержащей соты, причем узел (120) определения местоположения выполнен с возможностью:
определения информации, указывающей первый набор сот, используемых устройством (110) беспроводной связи, при установке значений времени задержки; и
передачи на устройство (110) беспроводной связи запроса определения местоположения, включающего в себя указанную информацию.
21. Узел (120) определения местоположения по п. 20, в котором информация указывает, какие соты из первого набора сот расположены совместно.
22. Узел (120) определения местоположения по п. 20 или 21, в котором первый набор сот содержит поднаборы сот, причем один поднабор содержит соты, расположенные совместно с обслуживающей сотой, а все другие поднаборы содержат соты, которые не расположены совместно с обслуживающей сотой, но расположены совместно с другими сотами в указанном наборе.
23. Узел (120) определения местоположения по п. 21 или 22, в котором информация содержит идентификацию конкретного устройства, подлежащую использованию в запросах доступа, переданных устройством (110) беспроводной связи сетевому узлу, в котором запрос доступа используется сетевым узлом для оценки времени задержки, при этом каждый поднабор содержит указание о том, разрешено или нет использование идентификации для сот упомянутого каждого поднабора.
24. Узел (120) определения местоположения по любому из пп. 20-23, в котором информация содержит указание качества обслуживания, относящееся к оценке местоположения устройства (110) беспроводной связи.
| LM ERICSSON, Multilateration Signaling for GERAN, RAN WG6 Meeting #1 (R6-160018), Gothenburg, Sweden, 25.08.2016, (найден 21.11.2019) найден в Интернет https://www.3gpp.org/ftp/tsg_ran/WG6_legacyRAN/TSGR6_01/Docs/ | |||
| NOKIA, Energy efficient hybrid TA/OTD multilateration for neighbour cells in extended coverage, 3GPP TSG RAN WG6 Meeting #1 |

