Изобретение относится к электромеханическим преобразователям энергии, а именно к преобразователям, принцип работы которых основан на применении пьезоэлектрических материалов испытывающих внешние инерционные воздействия, возникающие при движении различных транспортных средств, включая средства аэрокосмической техники.
Изобретение может быть использовано для формирования резервного питающего напряжения в различных областях техники для работы автономных электронных устройств с малым потреблением энергии.
Известен пьезоэлектрический генератор постоянного тока, например патент РФ № 2113757, который крепится к объектам, подверженным вибрации, причем генератор вырабатывает электрическую энергию за счет энергии вибрации объекта, к которому он прикреплен, в том числе объектам с приводом от энергии ветра.
Из известных, наиболее близким по технической сущности является пьезоэлектрический генератор (патент на полезную модель № 136937), содержащий пьезоэлектрический преобразователь, выполненный в виде плоского секционированного преобразователя, секции которого электрически соединены друг с другом, а каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом, резистор, диодный выпрямитель, накопительный конденсатор и опорный аккумулирующий элемент с электронной схемой регулирования напряжения, упругую консольную балку, закрепленную на стойке основания, инерционный груз, закрепленный на консольной балке.
Недостаток устройства, взятого за прототип, заключается в том, что деформация пьезоэлектрического преобразователя в результате воздействия инерционного ускорения а происходит плавно в соответствии с функциональной зависимостью инерционного ускорения а(t).
В большинстве случаев инерционное ускорение а(t) воздействующее на инерционное тело с одной степенью свободы при вибрационных и ударных возмущениях описывается непрерывной функцией первоначально возрастающей от нуля до некоторой наибольшей величины аmax по закону близкому к синусоидальному и затем убывающей по экспоненте (см. например, Батуев Г.С., Голубков Ю.В., Ефремов А.К. Федосов А.А. Инженерные методы исследования ударных процессов. - М., Машиностроение, 1969, стр. 61).
В связи с выше указанным, следует что, фронт нарастания инерционного ускорения воздействующего на инерционное тело пологий.
При этом имеет место значительное влияние на энергетические параметры начального нелинейного участка деформации пьезоэлементов пьезоэлектрического преобразователя (см. например, Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезо-электрические датчики / Под ред. В.М. Шарапова. – М., Техносфера, 2006, стр. 31).
А также имеет место значительное влияние на энергетические параметры электрических утечек за счет значительного времени деформации пьезоэлектрического преобразователя.
Например, в классических пьезоэлектрических датчиках выделяют статический и динамический пьезомодуль, а в конструкциях пьезоэлектрических акселерометров применяется предварительное поджатие пьезоэлементов (см. например, Левшина К.С., Новицкий И.В. Электрические измерения физических величин. М.: Энергоатомиздат, 1973, стр. 118 и Осадчий Е. П. Проектирование датчиков для измерения механических величин / Под ред. Осадчего Е. П. - М., Машиностроение, 1979. стр. 188).
На основании изложенного, следует предполагать, что применение форсирующего элемента, удерживающего от перемещения упругую консольную балку с пьезоэлементами пьезоэлектрического преобразователя до того момента, когда инерционное ускорение достигнет некоторого значения (ускорения форсирования), при котором происходит деформация форсирующего элемента позволит создать условия интенсивного нагружения пьезоэлементов, а также позволит уменьшить электрические утечки за счет уменьшения времени деформации пьезоэлектрического преобразователя (см. Петрунин Г.В.,Голотенков Н.О.Панюков И.Ю. Разработка автономного маломощного пьезоэлектрического источника питания. / Сб. статей ХХХII Международной НТК. «Проблемы автоматизации и управления в технических системах», - г.Пенза, Изд-во ПГУ, 2017).
В предлагаемом устройстве за счет применения форсирующего элемента создаются условия интенсивного нагружения пьезоэлементов.
Техническим результатом предлагаемого устройства по первому варианту является повышение энергетических параметров предлагаемого пьезоэлектрического источника питания за счет уменьшения влияния начального нелинейного участка деформации пьезоэлементов пьезоэлектрического преобразователя и уменьшения времени деформации пьезоэлектрического преобразователя.
Технический результат предлагаемого устройства по первому варианту достигается тем, что в устройстве, содержащем пьезоэлектрический преобразователь, выполненном в виде плоского секционированного преобразователя, секции которого электрически соединены друг с другом, а каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом, резистор, диодный выпрямитель, накопительный конденсатор, опорный аккумулирующий элемент с электронной схемой регулирования напряжения, упругую консольную балку, закрепленную на стойке основания и инерционный груз, закрепленный на консольной балке.
Дополнительно, на внешнем торце упругой консольной балки установлен форсирующий элемент в виде двух упругих пластинчатых пружин, а на основании вне балки установлен конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем значение угла при вершине конусообразного упора α находится в диапазоне от 50о до 65о, а конкретные значения определяются следующим условиям применения
m · nпор·g > k(α) · Rпор ,
где nпор - значение осевой пороговой перегрузки, формирующей рабочий прогиб консольной балки, m – масса инерционного груза, кг ; g – ускорение свободного падения, м/с2 ; k(α) – коэффициент передачи между конусообразным упором и упругой пластинчатой пружиной, Rпор – пороговое значение сопротивления пластинчатой пружины форсирующего элемента Н,
тому же, осевой зазор δ между упругой пластинчатой пружиной и конусной частью упора составляет величину от 0,15t до 0,22 t, где t толщина упругой консольной балки.
Введение новых элементов, а именно, размещение на внешнем торце упругой консольной балки форсирующего элемента в виде двух упругих пластинчатых пружин и конусообразного упора вне балки, ограничивающего перемещение форсирующего элемента упругой балки в осевом направлении, до достижения вибрационной перегрузки порогового значения, позволяет уменьшить влияние начального нелинейного участка деформации пьезоэлементов пьезоэлектрического преобразователя, а также позволяет уменьшить электрические утечки за счет уменьшения времени деформации пьезоэлектрического преобразователя
Кроме того, целью увеличения напряжения в предлагаемом устройстве по п.2 на накопительном конденсаторе, дополнительно на стойке основания размещены несколько упругих консольных балок с плоскими секционированными пьезоэлектрическими преобразователями, с инерционными грузами и таким же количеством форсирующих элементов в виде двух упругих пластинчатых пружин и конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении.
Причем плоские секционированные преобразователи электрически соединены параллельно друг с другом, а количество упругих консольных балок с пьезоэлектрическими преобразователями не менее трех, но не более двадцати, а длина и ширина каждой консольной балки выбираются из следующих соотношений Lбал = (0.7…0,95) · Lип , Bбал= (0,4…0,6) · Lбал , где Lип – приведенная длина источника питания.
Введение новых признаков в предлагаемое устройство, а именно, размещение на стойке основания нескольких упругих консольных балок с плоскими секционированными преобразователями, с инерционными грузами и таким же количеством форсирующих элементов в виде двух упругих пластинчатых пружин и конусообразного упора, ограничивающего перемещение форсирующего элемента упругой балки в осевом направлении, обеспечивает увеличение значения напряжения на накопительном конденсаторе, так как увеличивается количество плоских секционированных преобразователей, а следовательно, увеличивается величина заряда на накопительном конденсаторе.
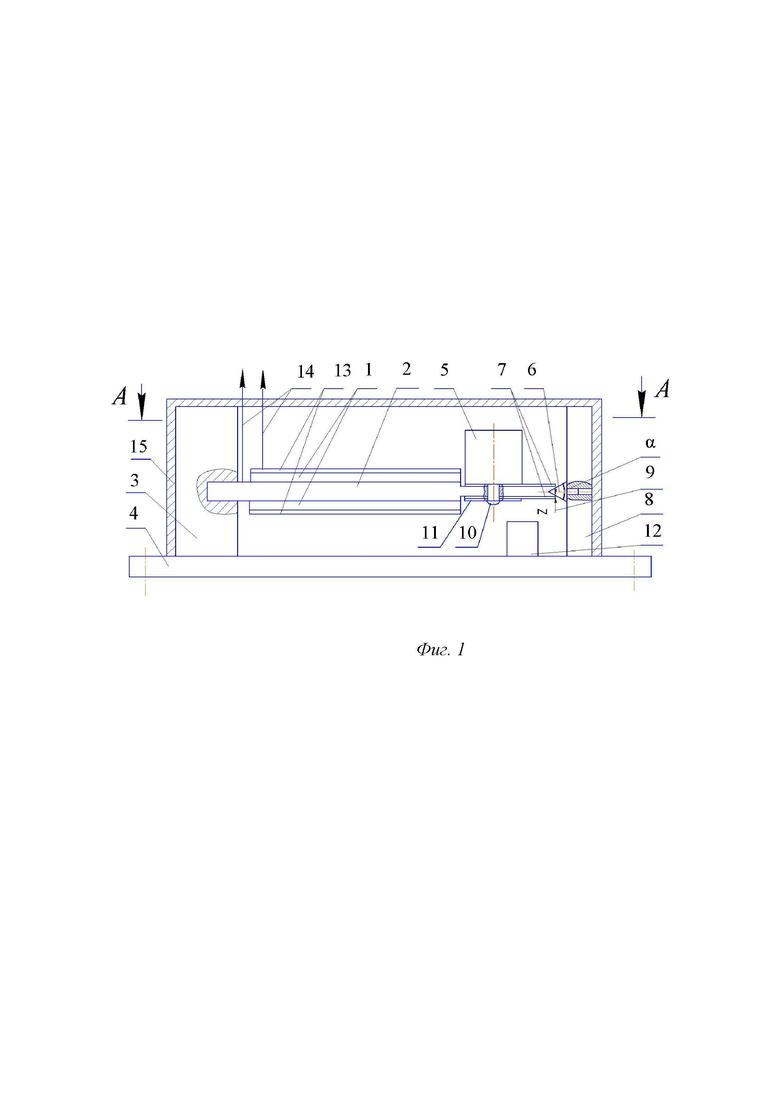
На фиг.1 схематически изображен общий вид пьезоэлектрического источника питания по первому варианту по п.1.
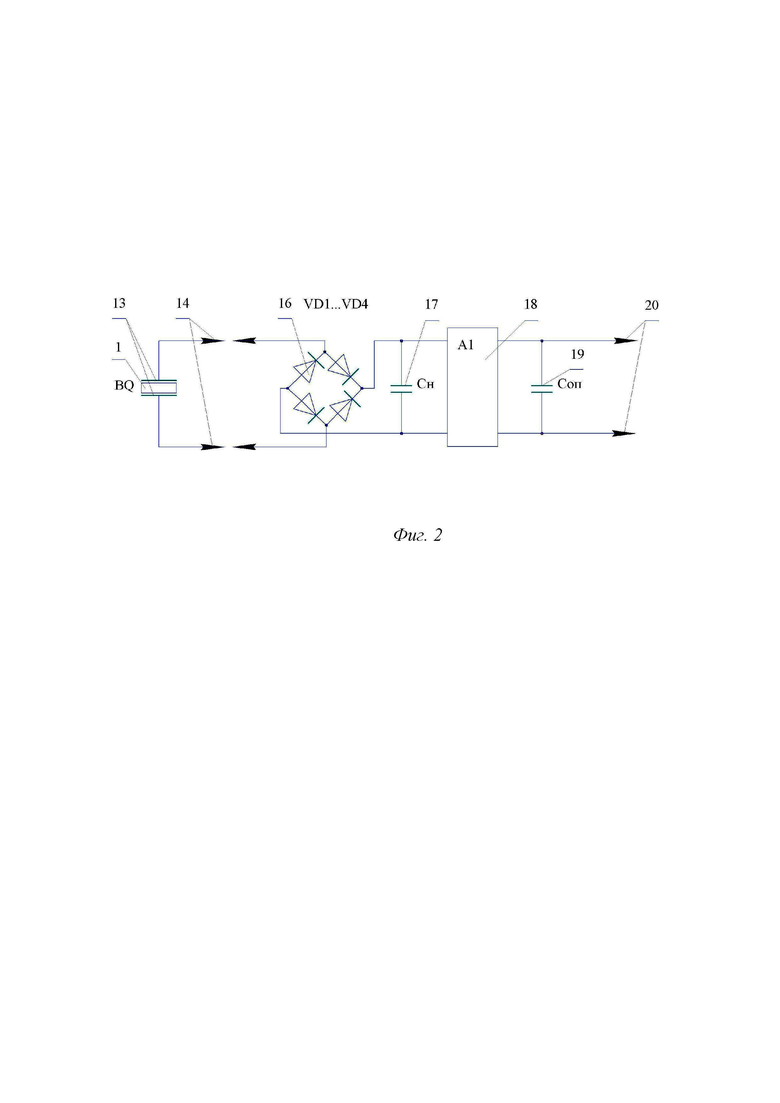
На фиг.2 представлена принципиальная схема предлагаемого устройства по первому варианту.
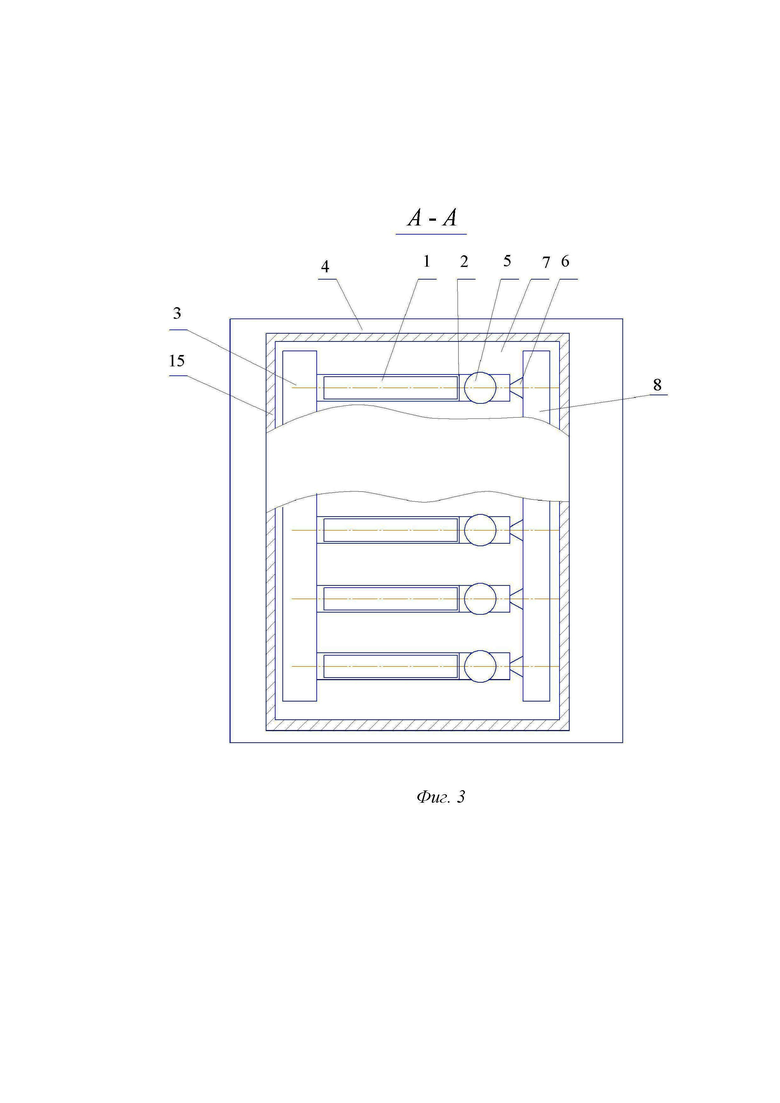
На фиг.3 схематически изображен общий вид пьезоэлектрического источника питания по первому варианту по п.2.
Устройство (фиг.1) содержит:
1 –пьезоэлектрический преобразователь;
2 –упругую консольную балку;
3 – стойку консольной балки;
4 – основание;
5 – инерционный груз;
6 – упор;
7 – упругую пластинчатую пружину;
8 –стойку упора;
9 – осевой зазор между упругой пластинчатой пружиной и конусной частью упора;
10 – головку заклепочного соединения;
11 - прокладку под заклепочное соединение;
12 – ограничитель осевого прогиба консольной балки;
13 – токонесущие поверхности пьезоэлектрического преобразователя;
14 – выходные электрические проводники пьезоэлектрического преобразователя;
15 – корпус.
Электрическая схема устройство (фиг.2) содержит:
16 – диодный выпрямитель;
17 – накопительный конденсатор;
18 – электронную схему регулирования напряжения;
19 – опорный аккумулирующий элемент;
20 – выходные контакты.
При этом, упругая консольная балка 2, пьезоэлектрический преобразователь, выполненный в виде плоского секционированного преобразователя 1 и инерционный груз 5 закреплены на стойке 3 основания.
Секции преобразователя 1 электрически соединены друг с другом, а каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом.
Дополнительно, на внешнем торце упругой консольной балки 2 установлен форсирующий элемент в виде двух упругих пластинчатых пружин 7.
На основании 4 вне балки установлен конусообразный упор 6, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении.
Причем значение угла при вершине конусообразного упора α находится в диапазоне от 50о до 65о, а конкретные значение определяются следующим условиям применения
m · nпор·g > k(α) · Rпор ,
где nпор - значение осевой пороговой перегрузки, формирующей рабочий прогиб консольной балки, m – масса инерционного груза, кг ; g – ускорение свободного падения, м/с2 ; k(α) – коэффициент передачи между конусообразным упором и упругой пластинчатой пружиной, Rпор – пороговое значение сопротивления пластинчатой пружины форсирующего элемента Н.
Упор 6 закреплен на основании 3 с помощью стойки упора 8.
Осевой зазор z 9 между упругой пластинчатой пружиной 7 и конусной частью упора 6 составляет величину от 0,15 · t до 0,22 · t, где t толщина упругой консольной балки 2.
Две упругие пластинчатые пружины 7 установлены на упругой консольной балке 2 с помощью заклепочного соединения. Надежное крепление двух упругих пластинчатых пружин 7 обеспечивается путем формирования головки заклепочного соединения 10. Прокладка под заклепочное соединение 11 обеспечивает надежное крепление нижней упругой пластинчатой пружины 7.
Ограничитель 12 на основании 3 ограничивает осевой прогиб консольной балки 2.
Корпус 15 формирует законченное конструктивное исполнение, а также обеспечивает ударостойкость и вибростойкость в условиях служебного обращения.
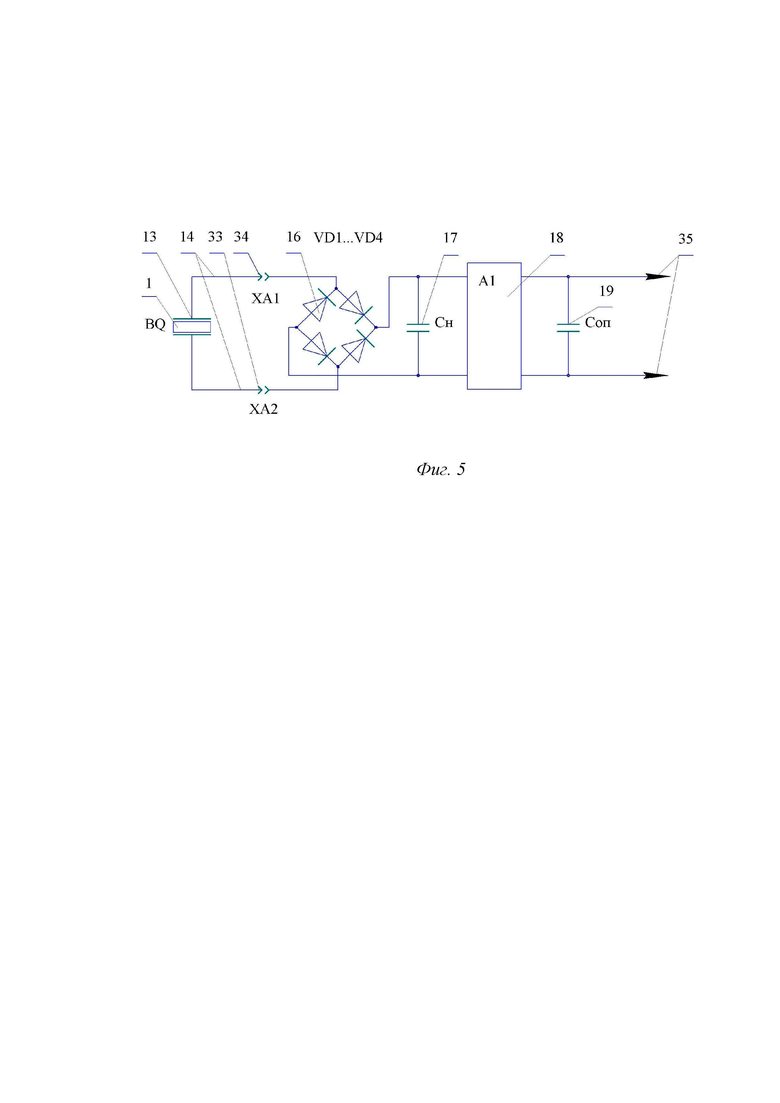
Токонесущие поверхности 13 пьезоэлектрического преобразователя 1 соединены выходными электрическими проводниками 14 с диодным выпрямителем 16.
В состав пьезоэлектрического источника питания входят также накопительный конденсатор 17, электронная схема регулирования напряжения 18 и опорный аккумулирующий элемент 19, а также выходные контакты 20.
Диодный выпрямитель 16, накопительный конденсатор 17, электронная схема 18 регулирования напряжения и опорный аккумулирующий элемент 19, а также выходные контакты 20 размещены в отдельном электронном блоке.
Работает предлагаемое устройство, а именно пьезоэлектрический резервный источник питания следующим образом.
Пьезоэлектрический резервный источник устанавливается на объекте, выходные электрические контакты 20 подключаются к основному источнику питания электронного устройства объекта, при необходимости используется известные буферные согласующие электронные устройства.
В процессе эксплуатации объекта, возникающие вибрационные воздействия вызывают вынужденные колебания упругой консольной балки 2 с пьезоэлектрическим преобразователем 1. Под действием вынужденных колебаних упругой консольной балки 2 с пьезоэлектрическим преобразователем 1 на обкладках 13 пьезоэлектрического преобразователя 1 возникает знакопеременное напряжение, которое подается на диодный выпрямитель 16 по соединительным проводникам 14.
Причем только после достижения вибрационной перегрузки порогового значения упругая консольная балка смещается, преодолевая сопротивление упругих пластинчатых пружин 7 и конусообразного упора 6, вызывая деформацию пьезоэлементов пьезоэлектрического преобразователя 1.
Причем за счет упора 6 и форсирующего элемента в виде двух упругих пластинчатых пружин 7 уменьшается влияние начального нелинейного участка деформации пьезоэлементов пьезоэлектрического преобразователя 1, так как деформация пьезоэлементов пьезоэлектрического преобразователя происходит только после достижения вибрационной перегрузки порогового значения.
С диодного выпрямителя 16 постоянное напряжение заряжает накопительный конденсатор 17, а затем, поступает на электронную схему регулирования напряжения 18, которая формирует резервное питающее напряжение с заданным значением напряжения, заряжая при этом опорный аккумулирующий элемент 19.
В качестве опорного аккумулирующего элемента 19 может использоваться ряд современных конденсаторов.
Выходные электрические контакты 20 подключаются к основному источнику электронного устройства объекта, при необходимости используются известные буферные согласующие электронные устройства, например, (см. Устройство резервного электропитания, патент РФ № 2446543).
В статье (см. Гриценко А Никифоров В. Щёголева Т. Состояние и перспективы развития пьезоэлектрических генераторов.// Новости о микросхемах. Инженерная микроэлектроника. 2013. № 5) рассмотрены предельные параметры конструкции многослойных пьезоэлектрических генераторов и отмечено, что удельное значение запасенной энергии в пьезогенераторе при давлении 108 Н/м2 составляет W/V = 0,25–0,3 Дж/см3.
Расчеты показывают, что при рабочей площади пьезоэлектрического преобразователя от 3 см2 до 8 см2 и значении емкости накопительного конденсатора от 33 мкФ до 100 мкФ значение запасенной энергии составляет 0,75–2,4 Дж, а максимальное значение напряжения на накопительном конденсаторе может достигать 90 В.
За счет электронной схемы регулирования напряжения 18 и опорного аккумулирующего элемента 19 формируется питающее напряжение с заданным номинальным значением.
Например, при 5 вольтовом питании и токе потребления 0,05 мА, вышеуказанного значения запасенной энергии достаточно для резервного питания электронного устройства в течении до 50 секунд.
Расчеты и предварительные испытания макетов предлагаемого пьезоэлектрического резервного источника питания показали, что за счет упора 6 форсирующего элемента в виде двух упругих пластинчатых пружин 7 напряжение на накопительном конденсаторе увеличивается на 8…15% по сравнению с аналогичными источниками питания выполненными по классической конструктивной схеме.
В предлагаемом устройстве по п.2, с целью увеличения напряжения на накопительном конденсаторе 21, дополнительно на стойке основания размещены несколько упругих консольных балок 2 с плоскими секционированными пьезоэлектрическими преобразователями 1, с инерционными грузами 5 (Фиг. 3).
Одновременно, дополнительно, на внешнем торце упругой консольной балки 2 установлены таком же количестве форсирующие элементы в виде двух упругих пластинчатых пружин 7.
Упоры 6 с клиновидными поверхностями ограничивают перемещение упругих консольных балок 2 в осевом направлении.
Причем, с целью увеличения напряжения на накопительном конденсаторе 19 плоские секционированные преобразователи 1 электрически соединены параллельно друг с другом.
Теоретические и экспериментальные исследования показывают, что увеличение напряжения на накопительном конденсаторе за счет увеличения длины пьезоэлектрического преобразователя огранивается габаритными размерами пьезоэлектрического источника питания.
Увеличение напряжения на накопительном конденсаторе за счет увеличение ширины пьезоэлектрического преобразователя огранивается устойчивостью к поперечному изгибу упругой балки. Поперечный изгиб пьезоэлектрического преобразователя резко снижает генерируемое им напряжение.
В связи с вышеотмеченным длина и ширина каждой консольной балки выбирается из следующих соотношений Lбал = (0.7…0,95) · Lип , Bбал= (0,4…0,6) · Lбал , где Lип – приведенная длина источника питания, а количество упругих консольных балок с пьезоэлектрическими преобразователями не менее трех, но не более двадцати. Приведенная Lип длина источника питания определяется, как его общая длина с вычетом выступающих частей.
Предлагаемое устройство по п. 2 позволяет увеличить напряжение на накопительном конденсаторе за счет увеличения количества плоских секционированных преобразователей, следовательно, увеличить величину заряда на накопительном конденсаторе.
При количестве плоских секционированных преобразователей 10…20 шт., при 5 вольтовом питании и токе потребления 0,05 мА, вышеуказанного значения запасенной энергии достаточно для работы электронного устройства в течении до 15 минут. Для габаритных объектов количество плоских секционированных преобразователей можно довести до 100 шт. и более, используя многоблочные и многоуровневые конструкции. При этом запасенной энергии будет достаточно для работы электронного устройства в течении до 50 минут и более в зависимости от энергопотребления электронного устройства.
Технический результат по второму варианту заключается в применении пьезоэлектрического резервного источника питания для автономных стационарных объектов наружного размещения, использующего для функционирования скоростной воздушный напор, создаваемый порывами ветра.
Технический результат предлагаемого устройства по второму варианту достигается тем, что в устройстве, содержащем пьезоэлектрический преобразователь, выполненный в виде плоского секционированного преобразователя, секции которого электрически соединены друг с другом, а каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом, резистор, диодный выпрямитель, накопительный конденсатор, опорный аккумулирующий элемент с электронной схемой регулирования напряжения, упругую консольную балку, закрепленную на стойке основания и инерционный груз, закрепленный на консольной балке, дополнительно на внешнем торце упругой консольной балки установлен форсирующий элемент в виде двух упругих пластинчатых пружин, а на основании вне балки установлен конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем значение угла при вершине конусообразного упора α находится в диапазоне от 50о до 65о, а конкретные значение определяются следующим условиям применения
m · nпор·g > k(α) · Rпор ,
где nпор - значение осевой пороговой перегрузки, формирующей рабочий прогиб консольной балки, m – масса инерционного груза, кг ; g – ускорение свободного падения, м/с2 ; k(α) – коэффициент передачи между конусообразным упором и упругой пластинчатой пружиной, Rпор – пороговое значение сопротивления пластинчатой пружины форсирующего элемента Н,
к тому же, осевой зазор δ между упругой пластинчатой пружиной и конусной частью упора составляет величину от 0,15t до 0,22 t, где t толщина упругой консольной балки, кроме того, на нижней поверхности основания закреплена U-образная пластинчатая пружина, закрепленная верхней частью на основании, а нижней частью на вращающейся опоре, причем пружина соосна с упругой консольной балкой, одновременно, на основании, с противоположной части U-образного торца пластинчатой пружины закреплены приемник воздушного напора, с дополнительным грузом и флюгирующий элемент в виде, например, вертикальной пластины с двумя дополнительными флюгирующими частями, расположенными в верней части и отогнутыми на 900 относительно плоскости пластины, формирующие периодический вращающий момент, действующий на основание, причем, приемник воздушного напора выполнен, например, в виде разностороннего уголка, одна полка которого обеспечивает крепление на основании, а вторая, выступающая за верхнюю часть корпуса, обеспечивает прием воздушного напора, одновременно, дополнительно, на противоположной стороне приемника воздушного напора закреплен защитный экран выполненный, например, в виде разностороннего уголка, одна полка которого обеспечивает крепление на вращающейся опоре, а вторая, выступающая за верную часть корпуса частично прикрывает приемник воздушного напора, причем, соотношение между высотой l а пр активной части приемника воздушного напора и высотой выступающей части l1 защитного экрана задается из условия
l а пр - l1 = l пр · cos αпред ,
где l пр - высота приемника воздушного напора, αпред - предельного значением угла отклонение приемник воздушного напора не менее 250 и не более 350,
в тоже время, вращающаяся опора с закрепленной U-образной пластинчатой пружиной подвижно закреплена на круглой пластине жестко закрепляемой на объекте за счет резьбового соединения с фрикционными элементами для вращения относительно объекта, причем, прогиб λ u пр U-образной пластинчатой пружины выбирается из условия λ u пр = (0,8…0,95) · h u пр, где h u пр – высота U-образной части пластинчатой пружины, в тоже время h u пр = (0,25… 0,55) l u пр, где l u пр – приведенная длина U-образной пластинчатой пружины, а частота собственных колебаний соответствует частоте собственных колебаний приемника воздушного давления и составляет не менее 8 Гц и не более 25 Гц, одновременно, выходные электрические проводники пьезоэлектрического преобразователя посредством центрального контакта и периферийного токосъемника на вращающейся опоре соединены с внешними выходные электрическими проводниками.
Введение новых элементов, а именно, U-образной пластинчатой пружины, закрепленной верхней частью на основании, а нижней частью на вращающейся опоре, подвижно закрепленной на круглой плате жестко закрепляемой на объекте, а также, приемника воздушного напора, с дополнительным грузом и флюгирующим элементом, формирующем полезные вынужденные колебания и вращение относительно объекта, обеспечивает применение пьезоэлектрического резервного источника питания для автономных стационарных объектов наружного размещения, а для функционирования использовать скоростной воздушный напор, создаваемый порывами ветра.
Кроме того, целью увеличения напряжения в предлагаемом устройстве по п.2 на накопительном конденсаторе, дополнительно на стойке основания размещены несколько упругих консольных балок с плоскими секционированными пьезоэлектрическими преобразователями, с инерционными грузами и таким же количеством форсирующих элементов в виде двух упругих пластинчатых пружин и конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем плоские секционированные преобразователи электрически соединены параллельно друг с другом, а количество упругих консольных балок с пьезоэлектрическими преобразователями не менее трех, но не более двадцати, а длина и ширина каждой консольной балки выбираются из следующих соотношений Lбал = (0.7…0,95) · Lип , Bбал= (0,4…0,6) · Lбал , где Lип – приведенная длина источника питания.
Введение новых признаков в предлагаемое устройство, а именно, размещение на стойке основания несколько упругих консольных балок с плоскими секционированными преобразователями, с инерционными грузами и таким же количеством форсирующих элементов в виде двух упругих пластинчатых пружин и конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении. В тоже время, соединение плоских секционированных преобразователей параллельно друг с другом, обеспечивает увеличение значения напряжения на накопительном конденсаторе, так как увеличивается количество плоских секционированных преобразователей, следовательно, увеличивается величина заряда на накопительном конденсаторе.
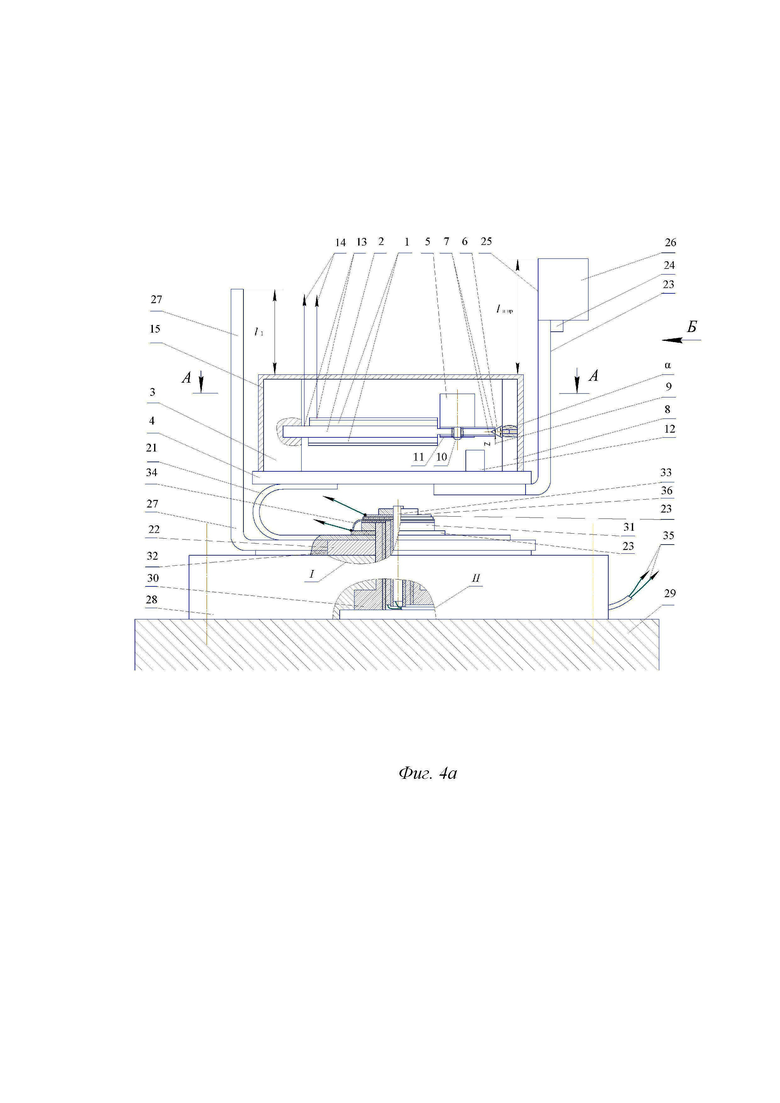
На фиг.4а схематически изображен общий вид пьезоэлектрического источника питания по второму варианту по п.3.
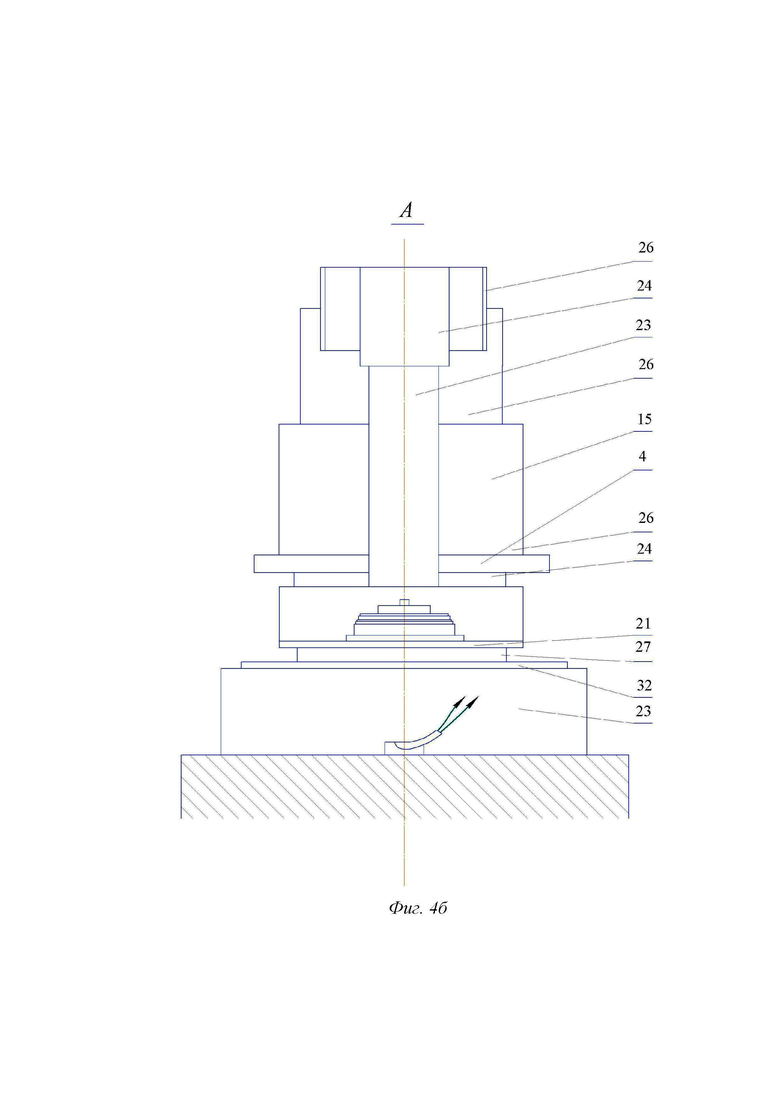
На фиг.4б представлен вид А пьезоэлектрического источника питания по второму варианту по п.3.
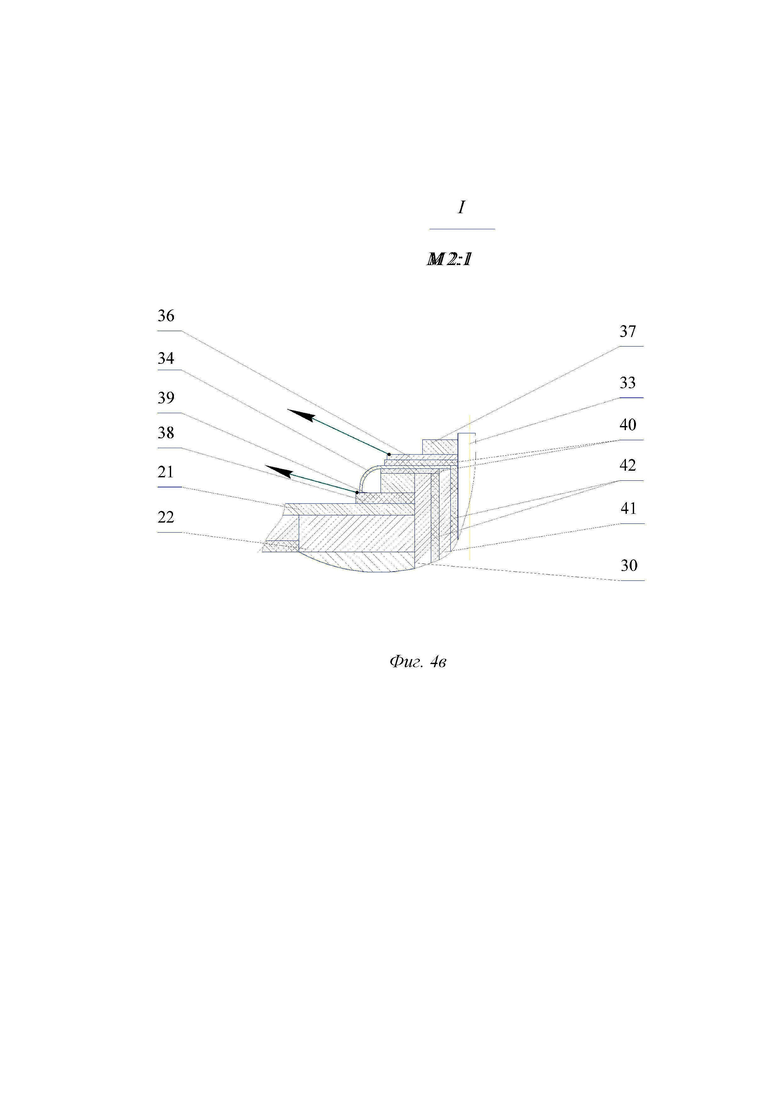
На фиг.4в представлен фрагмент I пьезоэлектрического источника питания по второму варианту по п.3.
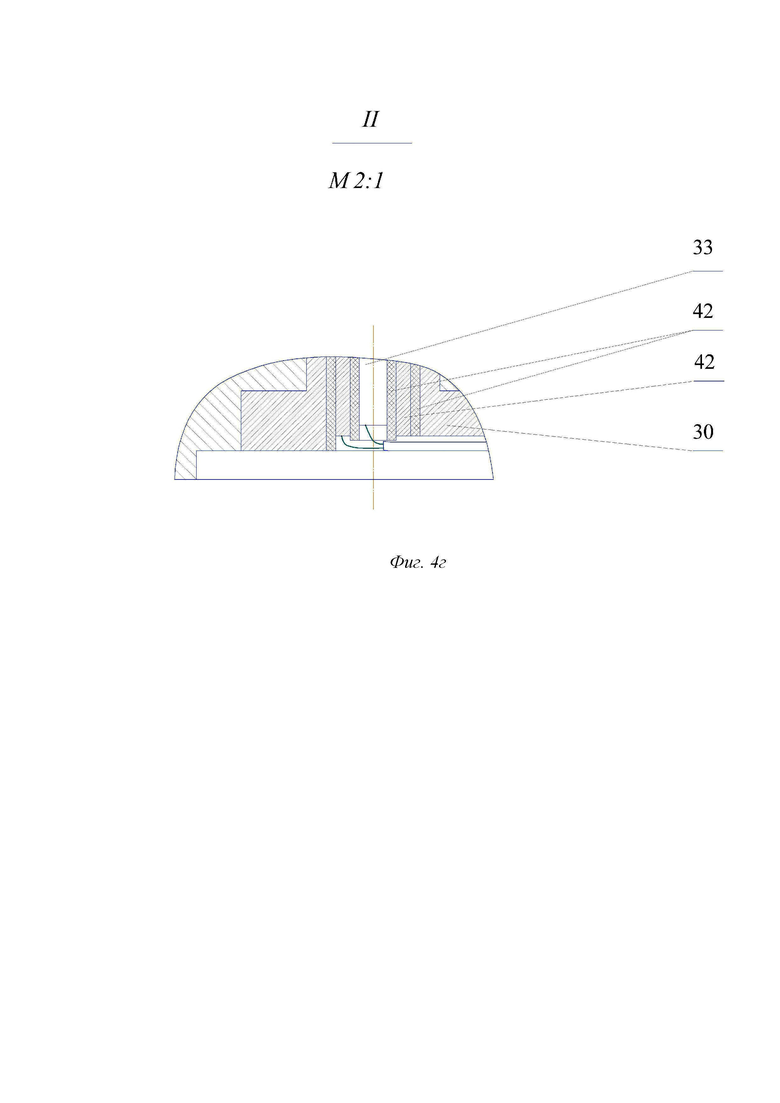
На фиг.4г представлен фрагмент II пьезоэлектрического источника питания по второму варианту по п.3.
На фиг.5 представлена принципиальная схема предлагаемого устройства по второму варианту.
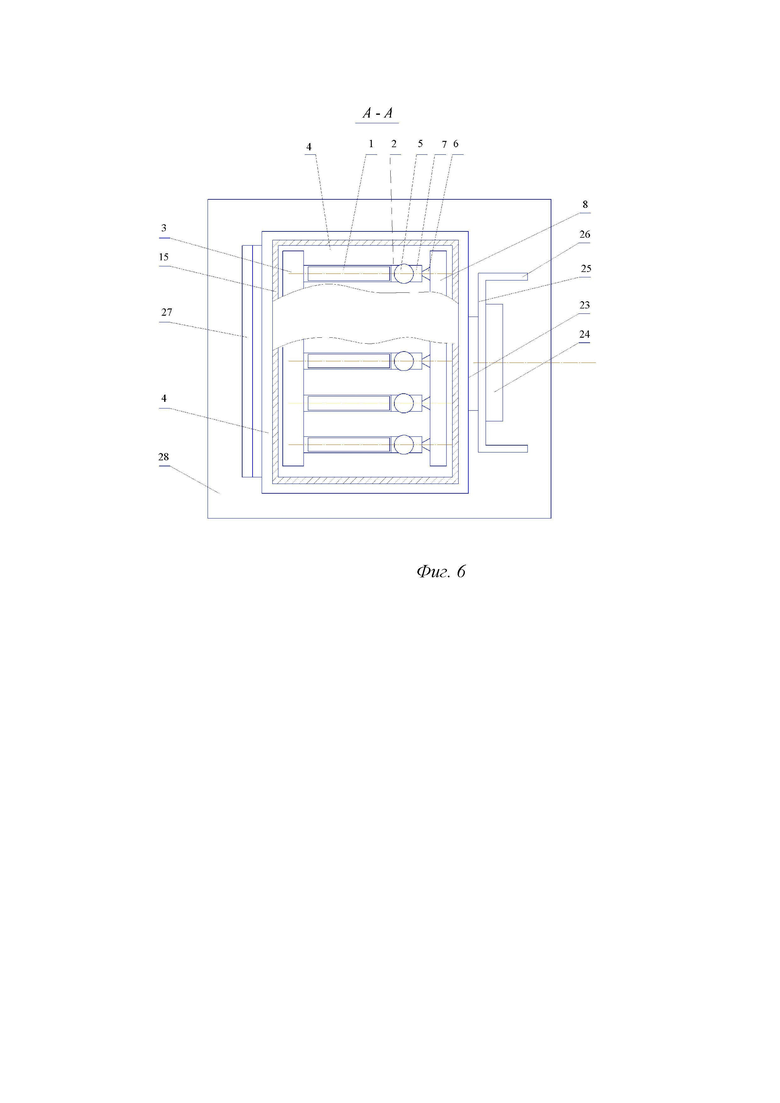
На фиг.6 схематически изображен общий вид пьезоэлектрического источника питания по второму варианту по п.4.
Устройство по второму варианту (фиг.6) содержит:
1 –пьезоэлектрический преобразователь;
2 –упругую консольную балку;
3 – стойку консольной балки;
4 – основание;
5 – инерционный груз;
6 – упор;
7 – упругую пластинчатую пружину;
8 –стойку упора;
9 – осевой зазор между упругой пластинчатой пружиной и конусной частью упора;
10 – головку заклепочного соединения;
11 - прокладку под заклепочное соединение;
12 – ограничитель осевого прогиба консольной балки;
13 – токонесущие поверхности пьезоэлектрического преобразователя;
14 – выходные электрические проводники пьезоэлектрического преобразователя;
15 – корпус.
Электрическая схема устройство (фиг.2) содержит:
16 – диодный выпрямитель;
17 – накопительный конденсатор;
18 – электронную схему регулирования напряжения;
19 – опорный аккумулирующий элемент;
20 – выходные контакты;
21 – U-образную пластинчатую пружину;
22 – вращающуюся опору;
23 – вертикальную пластину приемника воздушного напора;
24 - дополнительный груз;
25 - активную поверхность приемника воздушного напора;
26 - флюгирующую часть приемника воздушного напора;
27 - защитный экран;
28 - круглую плату;
29 – внешний объект;
30 - опорную втулку;
31 – гайку;
32 - фрикционный элемент;
33 - центральный контакт;
34 - периферийный токосъемник;
35 - выходные электрические проводники;
36 - контактную пластину;
37 - гайку центрального контакта;
38 - изоляционную шайбу с металлизированной периферийной верхней поверхностью;
39 - металлизированную периферийную верхнюю поверхность;
40 – изоляционные шайбы;
41 - периферийную контактную трубку;
42 - изоляционные трубки.
Предлагаемое устройство по второму варианту, дополнительно, в устройстве по первому варианту, на нижней поверхности основания 4 закреплена U-образная пластинчатая пружина 21, закрепленная верхней частью на основании 4, а нижней частью на вращающейся опоре 22, причем U-образная пружина 21 сосна с упругой консольной балкой 2.
На основании 4 с противоположной части U-образного торца пластинчатой пружины 21 закреплены приемник воздушного напора, с дополнительным грузом 23 и флюгирующий элемент. Приемник воздушного напора выполнен в виде, например, вертикальной пластины 24 с активной поверхностью 25.
Флюгирующий элемент содержит, например, две дополнительных флюгирующих части 26, расположенные в верней части вертикальной пластины 23 и отогнутые на 900 относительно активной поверхности 25.
Приемник воздушного напора формирует периодический вращающий момент, действующий на основание 4. Причем приемник воздушного напора выполнен, например, в виде разностороннего уголка, одна полка которого обеспечивает крепление на основании 4, а вторая, выступающая за верную часть корпуса 15, обеспечивает прием воздушного напора от порывов ветра.
На противоположной стороне приемника воздушного напора закреплен защитный экран 27 выполненный, например, в виде разностороннего уголка, одна полка которого обеспечивает крепление на вращающейся опоре , а вторая, выступающая за верную часть корпуса 15 частично прикрывает активную поверхность 25 приемника воздушного напора.
Соотношение между высотой активной части l а пр приемника воздушного напора и выступающая части l1 защитный экран 27 задается из условия:
l а пр - l1 = l пр · cos αпред ,
где l пр - высота приемника воздушного напора, αпред - предельного значением угла отклонение приемник воздушного напора не менее 250 и не более 350.
Вращающейся опора 22 с закрепленной U-образной пластинчатой пружиной подвижно закреплена на круглой массивной плате 28 жестко закрепляемой на объекте 29 за счет резьбового соединения, а именно опорной втулки 30 и гайки 31 с фрикционными элементами 32 для вращательного движения относительно объекта 29.
Выходные электрические проводники 13 пьезоэлектрического преобразователя соединены посредством центрального контакта 33 и периферийного токосъемника 34 расположенные на вращающейся опоре 22 с внешними выходными электрическими проводниками 35.
Центральный контакт 33 соединен с выходными контактами 13 посредством контактной пластины 36, закрепленной гайкой центрального контакта 37.
Периферийный токосъемник 34 соединен с выходными контактами 13 посредством изоляционной шайбы 38 с металлизированной верхней поверхностью 39. Периферийный токосъемник 34 изолирован от контактной пластины 36 двумя изоляционными шайбами 40.
Периферийный токосъемник 34 соединен с внешними выходными электрическими проводниками 35 посредством периферийной контактной трубки 41 и изолирован от центрального контакта 33 и с двумя изоляционными трубками 42.
Работает устройство, а именно пьезоэлектрический резервный источник питания следующим образом.
Под воздействием воздушного напора Rx(α) порыва ветра, величина которого определяется по формуле (см. например, Альтшуль А.Д., Киселев П.Г. Гидравлика и аэродинамика. - М.: Стройиздат, 1965. стр. 246), происходит изгиб упругой вертикальной пластины 21 приемника воздушного напора 22:
R x(α) = Cx·S(α)воз· (ρ·vвоз 2)/2 ,
где Cx – коэффициент аэродинамического сопротивления, α – угол отклонения активной поверхности приемника воздушного напора S(α)воз – активная площадь приемника воздушного напора, ρ – плотность воздуха, vвоз - скорость порыва ветра.
Под воздействием воздушного напора Rx(α) упругая вертикальная пластина 21 деформируется, преодолевая упругое сопротивление Rпр .
Значение упругого сопротивления Rпр(λ) определяется по формуле (см. например, Пономарев С.Д., Андреева Л.Е. Расчет упругих элементов машин и приборов. - М.: Машиностроение, 1980. стр. 26 ):
Rпр(λ) = λпр ·bпр ·dпр 3·E/4· lпр 3 ,
где λ пр , - линейная деформация упругой части упругой вертикальной пластины приемника воздушного напора, bпр , dпр , lпр , - соответственно, ширина, толщина и длина упругой вертикальной пластины приемника воздушного напора, E – модуль упругости материала пластины.
При изгибе активная поверхность 23 S (α)воз приемника воздушного напора уменьшается и соответственно уменьшается величина воздушного напора Rх(α), при этом уменьшается угловая скорость деформации
Rx(α) = Cx·S(α)воз· (ρ·v2)/2 = Cx· b а пр · [(l а пр – l а пр cos α)– l1]· (ρ·v2)/2 ,
l а пр – высота активной поверхности 25 приемника воздушного напора
l1 - высота выступающей части защитного экрана 27.
Когда упругое сопротивление R(λ) вертикальной пластины приемника воздушного напора привысит силу воздушного напора Rx(α) дальнейшее движение происходит за счет инерции дополнительного груза 24. После изгиба на предельный прогиб λпред угловая скорость деформация приближается к 0, далее происходит обратное движение вертикальной пластины под действием упругого сопротивления R пр(λ).
Таким образом приемник воздушного напора 22 вовлекается в колебательный процесс.
Начальное условие колебательного процесса:
Rx(α) > Rпр(λ)пр ,
где λ = 0; lа пр sin α = 0
Cx·bпр · (lа пр – l1)· (ρ·v2)/2 > λ пред ·bпр ·dпр 3·E/4·lпр 3
Условие максимальной деформации вертикальной пластины 21:
Rx(αпред) = Rпр(λпред)
Cx·b · [(lа пр - l а пр cos αпред)– l1]· (ρ·v2)/2 = λпред·bпр ·d пр 3·E/4·lпр 3
Выше приведенные условия определяют геометрические соотношения активной поверхности 25 приемника воздушного напора и выступающей части защитного экрана 27 в зависимости от условий функционирования источника питания.
Круговая частота ω пр и частота f пр собственных колебаний приемника воздушного напора, как системы с одной степенью свободы, определяется по формулам (см. например, Пономарев С.Д., Андреева Л.Е. Расчет упругих элементов машин и приборов. - М.: Машиностроение, 1980. стр.186 ):
ω пр = √k пр /m пр + mдоп ;
f пр = 1/2π·√k пр /m пр + mдоп ,
где k пр = R пр / λ пр = bпр ·dпр 3·E/4· lпр 3 - жесткость системы; m доп – масса дополнительного груза 34.
Реальные габаритные параметры предлагаемого устройства составляют: длина от 60 мм до 80 мм; ширина: от 3 мм до 40 мм; высота: от 40 мм до 60 мм без учета приемника воздушного напора, с приемником воздушного напора 80 мм до 160 мм. Масса источника питания и дополнительного груза: от 150 г до 300 г и от 15 г до 30 г, соответственно.
При скорости ветра от 5 до 20 м/с и геометрических параметрах приемника воздушного напора 22, а именно, выступающей части активной поверхности 23 приемника воздушного напора от 60 мм до 80 мм и его ширине от 60 мм до 80 мм усилие, действующее на вертикальную пластину 21 составляет 0,04 Н до 20 Н. При этом прогиб составляет 1,2 мм до 6 мм. Предельное значение угла αпред отклонения приемника воздушного напора не менее 250 и не более 350, а собственная частота колебаний от 10 Гц до 20 Гц.
Круговая частота Ω u ист и частота f u ист собственных колебаний источника питания с U-образной пластинчатой пружиной определяются по формулам:
Ω u ист = √k u ист /m ист ;
f u ист = 1/2π·√k u ист /m ист ,
где - k u ист = Ru / λ u ист - жесткость системы,
- Ru = λu · bu ·du 3·E u пр /4·l u 3 - значение усилия необходимого для формирования необходимого прогиба U-образной пластинчатой пружины λu
Значение λu - прогиба U-образной пластинчатой пружины выбирается из условия
λu = (0,8…0,95) · h u пр ,
где hu – высота U-образной части пластинчатой пружины, в тоже время hu = (0,25…055) · lu , где lu – приведенная длина U-образной пластинчатой пружины.
Приведенная длина l u пр U-образной пластинчатой пружины, которая определяется, как общая длина U-образной пластинчатой пружины с вычетом верхнее и нижней опорной части, значение которых принимается равным ширине U-образной пластинчатой пружины.
Исходя из реальных габаритных размеров источника питания, частота его собственных колебаний составляет от 8 Гц до 25 Гц и соответствует частоте собственных колебаний приемника воздушного давления.
Расчеты показывают, что при давлении 108 Н/м2 в пьезогенераторе удельное значение запасенной энергии составляет W/V = 0,25–0,3 Дж/см3 (см. Гриценко А Никифоров В. Щёголева Т. Состояние и перспективы развития пьезоэлектрических генераторов.// Новости о микросхемах. Инженерная микроэлектроника. 2013. № 5).
При рабочей площади пьезоэлектрического преобразователя от 3 см2 до 8 см2 и значении емкости накопительного конденсатора от 33 мкФ до 100 мкФ значение запасенной энергии составляет 0,75–2,4 Дж, а максимальное значение напряжения на накопительном конденсаторе может достигать 90 В.
За счет электронной схемы регулирования напряжения 18 и опорного аккумулирующего элемента 19 формируется питающее напряжение с заданным номинальным значением.
Например, при 5 вольтовом питании вышеуказанного значения запасенной энергии достаточно для круглосуточной работы электронного устройства с током потребления до 0,1 мА с периодическим переходом в режим питания только от опорного аккумулирующего элемента при отсутствии порывов ветра в течении до 3 минут.
На фиг.6 схематически изображен общий вид пьезоэлектрического источника питания по второму варианту по п.4.
В предлагаемом пьезоэлектрическом источнике питания, с целью увеличения напряжения на накопительном конденсаторе 21, дополнительно на стойке 3 основания размещены несколько упругих консольных балок 2 с плоскими секционированными пьезоэлектрическими преобразователями 1, с инерционными грузами 5.
Одновременно, дополнительно, на внешнем торце упругой консольной балки 2 установлены таком же количестве форсирующие элементы в виде двух упругих пластинчатых пружин 7.
Упоры 6 с клиновидными поверхностями ограничивают перемещение упругих консольных балок 2 в осевом направлении.
Причем, с целью увеличения напряжения на накопительном конденсаторе 19 плоские секционированные преобразователи 1 электрически соединены параллельно друг с другом.
Теоретические и экспериментальные исследования показывают, что увеличение напряжения на накопительном конденсаторе за счет увеличения длины пьезоэлектрического преобразователя огранивается габаритными размерами пьезоэлектрического источника питания.
Увеличение напряжения на накопительном конденсаторе за счет увеличения ширины пьезоэлектрического преобразователя огранивается устойчивостью к поперечному изгибу упругой балки. Поперечный изгиб пьезоэлектрического преобразователя резко снижает генерируемое им напряжение.
В связи с вышеотмеченным длина и ширина каждой консольной балки выбирается из следующих соотношений Lбал = (0.7…0,95) · Lип , Bбал= (0,4…0,6) · Lбал , где Lип – приведенная длина источника питания. Приведенная Lип длина источника питания определяется, как его общая длина с вычетом выступающих частей.
Список источников
1. Патент “Пьезоэлектрический генератор постоянного тока”. РФ №2113757.
2. Патент на полезную модель “Пьезоэлектрический генератор”. №136937.
3. Батуев Г.С., Голубков Ю.В., Ефремов А.К., Федосов А.А. Инженерные методы исследования ударных процессов. - М.: Машиностроение, 1977.
4. Шарапов В.М., Мусиенко М.П., Шарапова Е.В. Пьезоэлектрические датчики / Под ред. В.М. Шарапова. – М., Техносфера, 2006.
5. Левшина К.С., Новицкий И. Электрические измерения физических величин. - М.: Энергоатомиздат, 1973.
6. Осадчий Е. П. Проектирование датчиков для измерения механических величин / Под ред. Осадчего Е. П. - М., Машиностроение, 1979.
7. Петрунин Г.В.,Голотенков Н.О.Панюков И.Ю. Разработка автономного маломощного пьезоэлектрического источника питания. / Сб. статей ХХХII Международной НТК. «Проблемы автоматизации и управления в технических системах», - г.Пенза, Изд-во ПГУ, 2017.
8. Гриценко А Никифоров В. Щёголева Т. Состояние и перспективы развития пьезоэлектрических генераторов.// Новости о микросхемах. Инженерная микроэлектроника. 2013. № 5.
9. Патент “Устройство резервного электропитания”. РФ № 2446543
10. Альтшуль А.Д., Киселев П.Г. Гидравлика и аэродинамика. - М.: Стройиздат, 1965.
11. Пономарев С.Д., Андреева Л.Е. Расчет упругих элементов машин и приборов. - М.: Машиностроение, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАДЕЙСТВОВАНИЯ СРЕДСТВА ПАССИВНОЙ БЕЗОПАСНОСТИ ПРИ БОКОВЫХ СТОЛКНОВЕНИЯХ АВТОМОБИЛЯ | 2004 |
|
RU2271945C2 |
| Пьезоэлектрический преобразователь кантилеверного типа механической энергии в электрическую | 2015 |
|
RU2623445C1 |
| Пьезоэлектрический приемник низкочастотной вибрации | 2021 |
|
RU2778373C1 |
| Трехкомпонентный пьезоэлектрический сейсмоакустический приемник | 1989 |
|
SU1718173A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| АКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕРАЗРУШАЮЩЕГО УЛЬТРАЗВУКОВОГО ЛОКАЛЬНОГО КОНТРОЛЯ КАЧЕСТВА ТРУБ | 2016 |
|
RU2623821C1 |
| КОНСТРУКЦИЯ И ТЕХНОЛОГИЯ ИЗГОТОВЛЕНИЯ ИНТЕГРАЛЬНОГО МИКРОМЕХАНИЧЕСКОГО РЕЛЕ С ПОДВИЖНЫМ ЭЛЕКТРОДОМ В ВИДЕ СТРУКТУРЫ С ПЬЕЗОЭЛЕКТРИЧЕСКИМ СЛОЕМ | 2011 |
|
RU2481675C2 |
| Гидроакустический приемник для гибкой протяженной буксируемой антенны | 2024 |
|
RU2828650C1 |
| Акселерометр | 1987 |
|
SU1478826A1 |
| ВИБРОПРИЕМНИК | 2001 |
|
RU2184941C1 |
Изобретение относится к электротехнике, к электромеханическим преобразователям энергии. Технический результат состоит в создании условий интенсивного нагружения пьезоэлементов за счет применения форсирующего элемента. Пьезоэлектрический резервный источник питания содержит пьезоэлектрический преобразователь, выполненный в виде плоского секционированного преобразователя, секции которого электрически соединены друг с другом. Каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом. Упругая консольная балка закреплена на стойке основания. Инерционный груз закреплен на консольной балке. На внешнем торце упругой консольной балки установлен форсирующий элемент в виде двух упругих пластинчатых пружин, а на основании вне балки установлен конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении. Кроме того, в источнике питания по второму варианту дополнительно на нижней поверхности основания закреплена U-образная пластинчатая пружина, закрепленная верхней частью на основании. В то же время вращающаяся опора с закрепленной U-образной пластинчатой пружиной подвижно закреплена на круглой плате, жестко закрепляемой на объекте, а также на основании закреплен приемник воздушного напора с дополнительным грузом и флюгирующий элемент, формирующие полезные вынужденные колебания и вращение относительно объекта. 2 н. и 2 з.п. ф-лы, 6 ил.
1. Пьезоэлектрический источник питания, содержащий пьезоэлектрический преобразователь, выполненный в виде плоского секционированного преобразователя, секции которого электрически соединены друг с другом, а каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом, резистор, диодный выпрямитель, накопительный конденсатор, опорный аккумулирующий элемент с электронной схемой регулирования напряжения, упругую консольную балку, закрепленную на стойке основания, и инерционный груз, закрепленный на консольной балке, отличающийся тем, что дополнительно на внешнем торце упругой консольной балки установлен форсирующий элемент в виде двух упругих пластинчатых пружин, а на основании вне балки установлен конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем значение угла при вершине конусообразного упора α находится в диапазоне от 50° до 65°, а конкретные значения определяются следующим условиям применения
mnпорg>k(α)Rпор,
где nпор - значение осевой пороговой перегрузки, формирующей рабочий прогиб консольной балки, m – масса инерционного груза, кг; g – ускорение свободного падения, м/с2; k(α) – коэффициент передачи между конусообразным упором и упругой пластинчатой пружиной, Rпор – пороговое значение сопротивления пластинчатой пружины форсирующего элемента Н,
к тому же осевой зазор δ между упругой пластинчатой пружиной и конусной частью упора составляет величину от 0,15t до 0,22t, где t толщина упругой консольной балки.
2. Пьезоэлектрический источник питания по п.1, отличающийся тем, что дополнительно на стойке основания размещены несколько упругих консольных балок с плоскими секционированными пьезоэлектрическими преобразователями с инерционными грузами и таким же количеством форсирующих элементов в виде двух упругих пластинчатых пружин и конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем плоские секционированные преобразователи электрически соединены параллельно друг с другом, а количество упругих консольных балок с пьезоэлектрическими преобразователями не менее трех, но не более двадцати, а длина и ширина каждой консольной балки выбираются из следующих соотношений Lбал = (0.7…0,95)Lип , Bбал= (0,4…0,6)Lбал , где Lип – приведенная длина источника питания.
3. Пьезоэлектрический источник питания, содержащий пьезоэлектрический преобразователь, выполненный в виде плоского секционированного преобразователя, секции которого электрически соединены друг с другом, а каждая секция состоит из одного или более пьезоэлементов, склеенных друг с другом и электрически соединенных друг с другом, резистор, диодный выпрямитель, накопительный конденсатор, опорный аккумулирующий элемент с электронной схемой регулирования напряжения, упругую консольную балку, закрепленную на стойке основания и инерционный груз, закрепленный на консольной балке, отличающийся тем, что дополнительно на внешнем торце упругой консольной балки установлен форсирующий элемент в виде двух упругих пластинчатых пружин, а на основании вне балки установлен конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем значение угла при вершине конусообразного упора α находится в диапазоне от 50° до 65°, а конкретные значения определяются следующим условиям применения
mnпорg>k(α)Rпор,
где nпор - значение осевой пороговой перегрузки, формирующей рабочий прогиб консольной балки, m – масса инерционного груза, g – ускорение свободного падения, k(α) – коэффициент передачи между конусообразным упором и упругой пластинчатой пружиной, Rпор – пороговое значение сопротивления пластинчатой пружины форсирующего элемента,
к тому же осевой зазор δ между упругой пластинчатой пружиной и конусной частью упора составляет величину от 0,15t до 0,22t, где t - толщина упругой консольной балки, кроме того, на нижней поверхности основания закреплена U-образная пластинчатая пружина, закрепленная верхней частью на основании, а нижней частью на вращающейся опоре, причем U-образная пружина соосна с упругой консольной балкой, одновременно на основании с противоположной части U-образного торца пластинчатой пружины закреплены приемник воздушного напора с дополнительным грузом и флюгирующий элемент в виде, например, вертикальной пластины с двумя дополнительными флюгирующими частями, расположенными в верхней части и отогнутыми на 90° относительно плоскости пластины, формирующие периодический вращающий момент, действующий на основание, причем приемник воздушного напора выполнен, например, в виде разностороннего уголка, одна полка которого обеспечивает крепление на основании, а вторая, выступающая за верхнюю часть корпуса, обеспечивает прием воздушного напора, одновременно дополнительно на противоположной стороне приемника воздушного напора закреплен защитный экран выполненный, например, в виде разностороннего уголка, одна полка которого обеспечивает крепление на вращающейся опоре, а вторая, выступающая за верную часть корпуса, частично прикрывает приемник воздушного напора, причем соотношение между высотой lа.пр активной части приемника воздушного напора и высотой выступающей части l1 защитного экрана задается из условия
lа.пр - l1 = lпрcosαпред,
где lпр - высота приемника воздушного напора, αпред - предельное значение угла отклонения приемника воздушного напора не менее 25° и не более 35°,
в то же время вращающаяся опора с закрепленной U-образной пластинчатой пружиной подвижно закреплена на круглой плате, жестко закрепляемой на объекте за счет резьбового соединения с фрикционными элементами для вращения относительно объекта, причем прогиб λu.прU-образной пластинчатой пружины выбирается из условия λu.пр = (0,8…0,95)hu.пр, где hu.пр – высота U-образной части пластинчатой пружины, в то же время hu.пр = (0,25… 0,55)lu.пр, где lu.пр – приведенная длина U-образной пластинчатой пружины, а частота собственных колебаний соответствует частоте собственных колебаний приемника воздушного давления и составляет не менее 8 Гц и не более 25 Гц, одновременно выходные электрические проводники пьезоэлектрического преобразователя посредством центрального контакта и периферийного токосъемника на вращающейся опоре соединены с внешними выходными электрическими проводниками.
4. Пьезоэлектрический источник питания по п.3, отличающийся тем, что дополнительно на стойке основания размещены несколько упругих консольных балок с плоскими секционированными пьезоэлектрическими преобразователями с инерционными грузами и таким же количеством форсирующих элементов в виде двух упругих пластинчатых пружин и конусообразный упор, ограничивающий перемещение форсирующего элемента упругой балки в осевом направлении, причем плоские секционированные преобразователи электрически соединены параллельно друг с другом, а количество упругих консольных балок с пьезоэлектрическими преобразователями не менее трех, но не более двадцати, а длина и ширина каждой консольной балки выбираются из следующих соотношений Lбал = (0.7…0,95)Lип , Bбал= (0,4…0,6)Lбал , где Lип – приведенная длина источника питания.
| Емкостный датчик к электронному влагомеру | 1960 |
|
SU136937A1 |
| 0 |
|
SU155155A1 | |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 1993 |
|
RU2113757C1 |
| 0 |
|
SU162565A1 | |
| US 5801475 A, 01.09.1998. | |||

