Область техники, к которой относится изобретение
Изобретение относится к измерительной технике в частности, к устройствам для измерения физических величин емкостными датчиками и может быть использовано во встраиваемых вычислительных системах контроля и управления.
Уровень техники
Известно устройство для измерения электрической емкости, содержащее два одновибратора, включенные по схеме кольцевого автогенератора, во времязадающие цепи первого и второго одновибраторов включены конденсаторы, соответственно измеряемой емкости и образцовой, два интегрирующих звена, подключенные к выходам соответствующих одновибраторов, индикатор, включенный между выходами интегрирующих звеньев. На выходе устройства формируется постоянное напряжение, которое зависит от изменения измеряемой емкости и отражается индикатором (см. пат. РФ №2156472, кл. G01R 27/26).
Недостаток известного решения - ограниченные функциональные возможности.
Известно устройство для измерения неэлектрических величин конденсаторными датчиками, содержащее микроконтроллер, индикатор, первый и второй генераторы, во времязадающие цепи которых включены соответственно емкостный датчик и образцовый конденсатор, выходы генераторов подключены к входам микроконтроллера, индикатор подключен к одному из портов микроконтроллера (см. пат. РФ №2214610, кл. G01R 27/26).
Недостаток известного решения - ограниченные функциональные возможности.
Наиболее близким по технической сущности к заявляемому техническому решению и принятое авторами за прототип является микроконтроллерное устройство для измерения частоты вращения вала, содержащее микроконтроллер, индикатор, первый и второй резисторы, емкостный датчик и образцовый конденсатор, которые первыми обкладками подключены к общему проводу, вторые обкладки емкостного датчика и образцового конденсатора подключены, соответственно, к первому и второму входам аналогового компаратора микроконтроллера и к первым выводам первого и второго резисторов, вторые выводы которых подключены к выходам микроконтроллера, индикатор подключен к одному из портов микроконтроллера (см. пат. РФ №2378658, кл. G01R 27/26).
Недостаток известного решения - низкая точность преобразований и ограниченные функциональные возможности, по причине несовершенного алгоритма преобразования емкости в двоичный код, а также ограниченных вычислительных и инфокоммуникационных возможностей устройства.
Раскрытие изобретения
Задачей предлагаемого изобретения является разработка измерительного устройства емкости для встраиваемых вычислительных систем контроля и управления, обладающего повышенной точностью преобразования и расширенными функциональными возможностями за счет использования более совершенного алгоритма преобразования емкости в двоичный код, благодаря введению третьего и четвертого резисторов, RC-фильтра и новых связей, а также увеличения вычислительных и инфокоммуникационных возможностей устройства, путем введения компьютера.
Технический результат достигается тем, что в микроконтроллерное измерительное устройство емкости для систем контроля и управления, содержащее микроконтроллер, емкостный датчик, первый и второй резисторы, причем первая обкладка емкостного датчика подключена к общему проводу, вторая обкладка емкостного датчика подключена к первому выводу первого резистора и к первому входу аналогового компаратора встроенного в микроконтроллер, дополнительно введены третий и четвертый резисторы, RC-фильтр и компьютер, причем вторая обкладка емкостного датчика подключена к первому выводу второго резистора, вторые выводы первого и второго резисторов подключены к выходам, соответственно первого и второго широтно-импульсных модуляторов, встроенных в микроконтроллер, первые выводы третьего и четвертого резисторов подключены к входу аналого-цифрового преобразователя встроенного в микроконтроллер, второй вывод третьего резистора подключен к цифровому выходу микроконтроллера, второй вывод четвертого резистора подключен к общему проводу, выход третьего широтно-импульсного модулятора, встроенного в микроконтроллер, подключен к входу RC-фильтра, выход которого подключен к второму входу аналогового компаратора, встроенного в микроконтроллер, компьютер подключен через цифровой последовательный интерфейс к микроконтроллеру.
Краткое описание чертежей
На чертеже представлена структурная схема микроконтроллерного измерительного устройства емкости для систем контроля и управления.
Осуществление изобретения
Микроконтроллерное измерительное устройство емкости для систем контроля и управления содержит резисторы 1, 2, 3, 4, емкостный датчик 5, микроконтроллер 6, RC-фильтр 7 и компьютер 8. Первая обкладка емкостного датчика 5 подключена к общему проводу, вторая обкладка емкостного датчика 5 подключена к первым выводам резисторов 1, 2 и к первому входу аналогового компаратора (аналоговый компаратор не показан), встроенного в микроконтроллер 6, вторые выводы резисторов 1 и 2 подключены к выходам, соответственно первого и второго широтно-импульсных модуляторов (ШИМ), встроенных в микроконтроллер 6 (ШИМ не показаны), выход третьего ШИМ, встроенного в микроконтроллер, (третий ШИМ не показан) подключен к входу RC-фильтра 7, выход которого подключен к второму входу аналогового компаратора, встроенного в микроконтроллер 6. Первые выводы резисторов 3 и 4 подключены к входу аналого-цифрового преобразователя (АЦП) встроенного в микроконтроллер 6 (АЦП не показан), второй вывод резистора 3 подключен к цифровому выходу микроконтроллера 6, второй вывод резистора 4 подключен к общему проводу. Компьютер 8 подключен через цифровой последовательный интерфейс к микроконтроллеру 6.
Микроконтроллерное измерительное устройство емкости для систем контроля и управления работает следующим образом.
Микроконтроллер 6, в соответствии с программой, настраивает первый ШИМ на заданную частоту генерирования широтно-импульсных сигналов (ШИМ-сигналов) с заданным коэффициентом заполнения, выход второго ШИМ микроконтроллер 6 переводит в высокоомное состояние. Сопротивления резисторов 1 и 2, а также емкость датчика 5 подобраны так, чтобы на заданной частоте ШИМ-сигналов, переходные процессы в RC-цепях, образованных этими элементами длились от одной до трех постоянных времени этих RC-цепей. На второй обкладке емкостного датчика 5 напряжение будет изменяться по экспоненте от минимального значения до максимального, по известным законам (заряд-разряд). Коэффициенты заполнения ШИМ-сигналов пропорциональны двоичным кодам, которые загружаются под управлением программы в специальные регистры ШИМов. Эти двоичные коды могут быть считаны из данных регистров процессором микроконтроллера 6 и обработаны по алгоритмам, формирующим результат измерения.
Микроконтроллер 6 выполняет алгоритм последовательно шаг за шагом следующим образом.
Шаг 1. Микроконтроллер 6 формирует на выходе третьего ШИМа ШИМ-сигнал с начальным минимальным коэффициентом заполнения. Этот ШИМ-сигнал приложен к входу RC-фильтра 7. При этом, изменяющееся на емкостном датчике 5 напряжение, контролируемое первым входом аналогового компаратора будет выше уровня напряжения, формируемого на втором входе аналогового компаратора RC-фильтром 7. На выходе аналогового компаратора будет логический 0.
Шаг 2. Микроконтроллер 6 начинает увеличивать коэффициент заполнения ШИМ-сигнала третьего ШИМа, напряжение на выходе RC-фильтра 7 плавно возрастает. Как только напряжение на выходе RC-фильтра 7 превысит изменяющееся напряжение на емкостном датчике 5, на выходе аналогового компаратора будет сформирована кратковременно логическая 1. Система прерываний микроконтроллера 6 сформирует сигнал, по которому микроконтроллер 6 перейдет к процедуре обработки данного прерывания. Эта процедура заключается в том, чтобы сохранить двоичный код пропорциональный коэффициенту заполнения ШИМ-сигнала третьего ШИМа, при котором было обнаружено равенство напряжений на емкостном датчике 5 и на выходе RC-фильтра 7. В этом случае, можно считать, что сохраненный двоичный код есть эквивалент минимального значения напряжения на емкостном датчике 5.
Шаг 3. Микроконтроллер 5 формирует на входе RC-фильтра 7 с помощью третьего ШИМа ШИМ-сигнал с начальным максимальным коэффициентом заполнения. При этом изменяющееся на емкостном датчике 5 напряжение, контролируемое первым входом АК будет ниже уровня напряжения, формируемого на втором входе АК RC-фильтром 7 и на выходе АК будет логическая 1.
Шаг 4. Микроконтроллер 6 начинает уменьшать коэффициент заполнения ШИМ-сигнала третьего ШИМа и напряжение на выходе RC-фильтра 7 плавно уменьшается. Как только напряжение на выходе RC-фильтра 7 будет ниже изменяющегося напряжения на емкостном датчике 5, то на выходе АК будет кратковременно сформирован логический 0 и система прерываний микроконтроллера 6 сформирует сигнал, по которому микроконтроллер 6 перейдет к процедуре обработки этого прерывания. Последняя заключается в том, чтобы сохранить двоичный код пропорциональный коэффициенту заполнения, при котором было обнаружено равенство напряжений на емкостном датчике 5 и на выходе RC-фильтра. В этом случае можно считать, что сохраненный двоичный код есть эквивалент максимального значения напряжения на емкостном датчике 5.
Шаг 5. Микроконтроллер 6 вычисляет разницу между максимальным и минимальным значениями напряжения на емкостном датчике 5 и сохраняет эту разницу в памяти. Таким образом, микроконтроллер 6 определяет размах изменения напряжения на емкостном датчике 5.
Шаг 6. Микроконтроллер 6 выводит на второй вывод резистора 3 высокий уровень напряжения (логическую 1), при этом на резисторе 4 относительно общего провода формируется напряжение, которое микроконтроллер 6 измеряет с помощью встроенного АЦП. Так как сопротивления резисторов 3 и 4 известны, то микроконтроллер 6 рассчитывает значение напряжения логической 1, это напряжение равно амплитуде ШИМ-сигналов всех трех ШИМов.
Шаг 7. Микроконтроллер 6 рассчитывает емкость датчика 5 по известным выражениям, так как известны сопротивление резистора 1 и параметры ШИМ-сигнала (временные и амплитуда) первого ШИМ.
Шаг 8. Микроконтроллер 6 отключает выход первого ШИМ от RC-цепи, состоящей из последовательно включенных резистора 1 и емкостного датчика 5, путем перевода выхода первого ШИМ в высокоомное состояние и подключает выход второго ШИМ к RC-цепи, состоящей из последовательно включенных резистора 2 и емкостного датчика 5. Затем микроконтроллер 6 повторяет алгоритм, состоящий из ранее описанных действий (шаги 2-6), только результат сохраняет под именем второй переменной.
Шаг 9. Микроконтроллер 6 рассчитывает емкость датчика 5 по известным выражениям, так как известны сопротивление резистора 2 и параметры ШИМ-сигнала (временные и амплитуда) второго ШИМ.
Второй ШИМ введен для получения дополнительной информации, характеризующей, например, зависимость диэлектрической проницаемости материала помещенного между обкладками емкостного датчика 5 с фиксированными геометрическими размерами. Известно, что диэлектрическая проницаемость зависит от скорости протекания процессов заряд/разряд и характеризует степень релаксации. Так как сопротивление резисторов 1 и 2 различны, то скорости протекания переходных процессов тоже будут различными при равной частоте и коэффициентах заполнения ШИМ-сигналов первого и второго ШИМов. Микроконтроллер 6 рассчитывает диэлектрическую проницаемость для разных сопротивлений резисторов 1 и 2, определяет ее разницу, сохраняет в памяти и выводит на экран монитора компьютера. Диэлектрическая проницаемость в определенной степени характеризует свойства материала, например, семян сельскохозяйственных культур, влажность которых измеряется диэлькометрическим методом.
Шаг 10. Микроконтроллер 6 отправляет результат преобразования через цифровой последовательный интерфейс на компьютер 8, который выводит этот результат на монитор и выполняет другие действия, определяемые его программой.
Шаг 11. Микроконтроллер 6 осуществляет переход к выполнению шага 1, т.е реализует новый цикл измерения.
Компьютер 8 может сохранять полученные от микроконтроллера 6 результаты измерений в памяти для их последующего анализа, а также может передавать результаты измерений по инфокоммуникационным сетям в любую географическую точку земли, в которой второй компьютер настроен на прием данной информации. Таким образом, осуществляется беспроводной контроль параметра измеряемой физической величины с помощью емкостного датчика 5, что расширяет функциональные возможности предлагаемого устройства.
Компьютер 8 позволяет оперативно записывать в программную память микроконтроллера 6 новые модифицированные программы, что также расширяет функциональные возможности предлагаемого устройства.
Микроконтроллер 6 способен изменять в соответствии с программой частоту следования и коэффициенты заполнения ШИМ-сигналов для правильного согласования с параметрами RC-цепей, образуемых резисторами 1, 2 и емкостным датчиком 5, что позволяет повысить точность измерений предлагаемого устройства по сравнению с прототипом.
Иногда требуется проводить измерения на нескольких частотах, особенно при измерении диэлектрической проницаемости материала расположенного между обкладками емкостного датчика, например, при измерении влажности семян сельскохозяйственных культур. Известно, что диэлектрическая проницаемость этих материалов зависит от частоты электрического поля между обкладками конденсатора.
Преимущества изобретения по сравнению с прототипом: благодаря введению новых элементов и связей, реализован более совершенный алгоритм преобразования емкости в двоичный код, что повышает точность устройства; благодаря введению компьютера увеличены вычислительные и инфокоммуникационные возможности устройства, что расширяет область его применения. В качестве компьютера может быть использован микрокомпьютер типа Raspberry Pi.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроконтроллерное измерительное устройство емкости для встраиваемых вычислительных систем контроля и управления | 2019 |
|
RU2698492C1 |
| Устройство измерения емкости для диэлькометрических влагомеров семян сельскохозяйственных культур | 2020 |
|
RU2747515C1 |
| Микроконтроллерный измерительный преобразователь емкости для диэлькометрических USB влагомеров зерна | 2023 |
|
RU2796213C1 |
| Устройство измерения емкости для встраиваемых систем управления | 2021 |
|
RU2774047C1 |
| Микроконтроллерное измерительное устройство емкости для встраиваемых вычислительных систем | 2018 |
|
RU2697715C1 |
| Микроконтроллерное измерительное устройство емкости для встраиваемых вычислительных систем | 2021 |
|
RU2756374C1 |
| Многоканальный микроконтроллерный измерительный преобразователь для беспроводных емкостных датчиков | 2023 |
|
RU2821720C1 |
| Многоканальный измерительный преобразователь для систем мониторинга влажности почвы емкостными датчиками | 2024 |
|
RU2820029C1 |
| Многоканальный микроконтроллерный измерительный преобразователь для зондов систем мониторинга влажности почвы емкостными датчиками | 2023 |
|
RU2818484C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СОПРОТИВЛЕНИЯ С УПРАВЛЯЕМОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2012 |
|
RU2491558C1 |
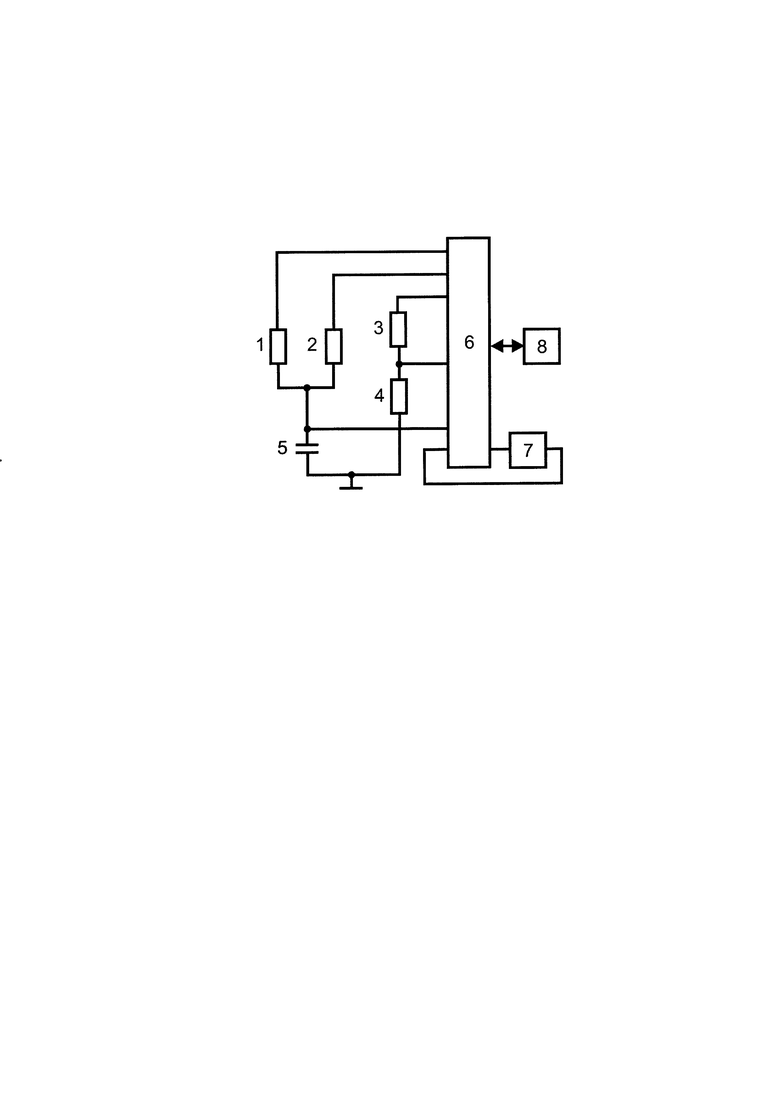
Изобретение относится к измерительной технике, в частности к устройствам для измерения физических величин емкостными датчиками, и может быть использовано во встраиваемых вычислительных системах контроля и управления. Микроконтроллерное измерительное устройство емкости для систем контроля и управления содержит резисторы 1, 2, 3, 4, емкостный датчик 5, микроконтроллер 6, RC-фильтр 7 и компьютер 8. Первая обкладка емкостного датчика 5 подключена к общему проводу, вторая обкладка емкостного датчика 5 подключена к первым выводам резисторов 1, 2 и к первому входу аналогового компаратора (не показан), встроенного в микроконтроллер 6, вторые выводы резисторов 1 и 2 подключены к выходам, соответственно первого и второго широтно-импульсных модуляторов (ШИМ), встроенных в микроконтроллер 6 (ШИМ не показаны), выход третьего ШИМ (не показан), встроенного в микроконтроллер, подключен к входу RC-фильтра 7, выход которого подключен к второму входу аналогового компаратора, встроенного в микроконтроллер 6. Первые выводы резисторов 3 и 4 подключены к входу аналого-цифрового преобразователя (АЦП), встроенного в микроконтроллер 6 (АЦП не показан), второй вывод резистора 3 подключен к цифровому выходу микроконтроллера 6, второй вывод резистора 4 подключен к общему проводу. Компьютер 8 подключен через цифровой последовательный интерфейс к микроконтроллеру 6. В качестве компьютера может быть использован микрокомпьютер типа Raspberry Pi. Техническим результатом при реализации заявленного решения является повышение точности преобразования и расширение функциональных возможностей устройства, благодаря возможности использования более совершенного алгоритма преобразования емкости в двоичный код, а также увеличению вычислительных и инфокоммуникационных возможностей устройства за счет введения компьютера. 1 ил.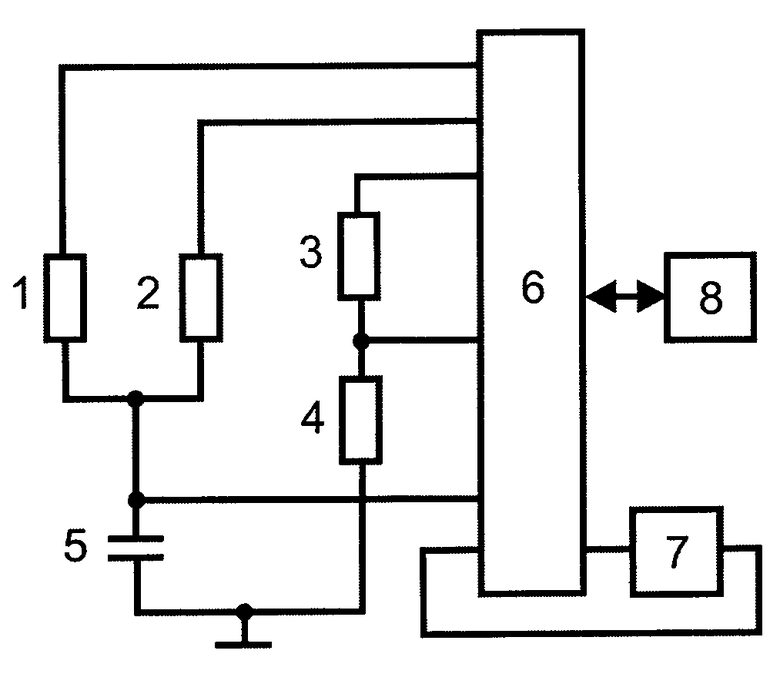
Микроконтроллерное измерительное устройство емкости для систем контроля и управления, содержащее микроконтроллер, емкостный датчик, первый и второй резисторы, причем первая обкладка емкостного датчика подключена к общему проводу, вторая обкладка емкостного датчика подключена к первому выводу первого резистора и к первому входу аналогового компаратора, встроенного в микроконтроллер, отличающееся тем, что дополнительно введены третий и четвертый резисторы, RC-фильтр и компьютер, причем вторая обкладка емкостного датчика подключена к первому выводу второго резистора, вторые выводы первого и второго резисторов подключены к выходам соответственно первого и второго широтно-импульсных модуляторов, встроенных в микроконтроллер, первые выводы третьего и четвертого резисторов подключены к входу аналого-цифрового преобразователя, встроенного в микроконтроллер, второй вывод третьего резистора подключен к цифровому выходу микроконтроллера, второй вывод четвертого резистора подключен к общему проводу, выход третьего широтно-импульсного модулятора, встроенного в микроконтроллер, подключен к входу RC-фильтра, выход которого подключен к второму входу аналогового компаратора, встроенного в микроконтроллер, компьютер подключен через цифровой последовательный интерфейс к микроконтроллеру.
| МИКРОКОНТРОЛЛЕРНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА | 2008 |
|
RU2378658C1 |
| Микроконтроллерное измерительное устройство емкости для встраиваемых вычислительных систем контроля и управления | 2019 |
|
RU2698492C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ И/ИЛИ АКТИВНОГО СОПРОТИВЛЕНИЯ | 2000 |
|
RU2208805C2 |
| Устройство для сравнения частот двух импульсных последовательностей | 1977 |
|
SU677087A1 |
| WO 2007075887 A2, 05.07.2007. | |||

