Область техники, к которой относится изобретение
Изобретение относится к измерению расстояний с использованием лазера и, в частности, к измерению расстояний посредством объединения радиотехнического (электронного) метода определения расстояний и интерферометрического метода определения перемещений с помощью измерителя дробной доли интерференционной полосы.
Уровень техники
В настоящее время лазерные интерферометрические методы широко используются в высокоточных измерениях, в частности, для регистрации деформаций земной поверхности в современной геодезии, гидрографии, геофизике. Кроме того, проводятся эксперименты для подтверждения фундаментальных теорий, в частности, теории гравитации. Лазер необходим для проведения высокоточных экспериментов в качестве стабильного эталона частоты.
Известные высокоточные средства измерения и установки основаны либо на радиотехническом (электронном) методе, либо на интерферометрическом методе определения абсолютных расстояний.
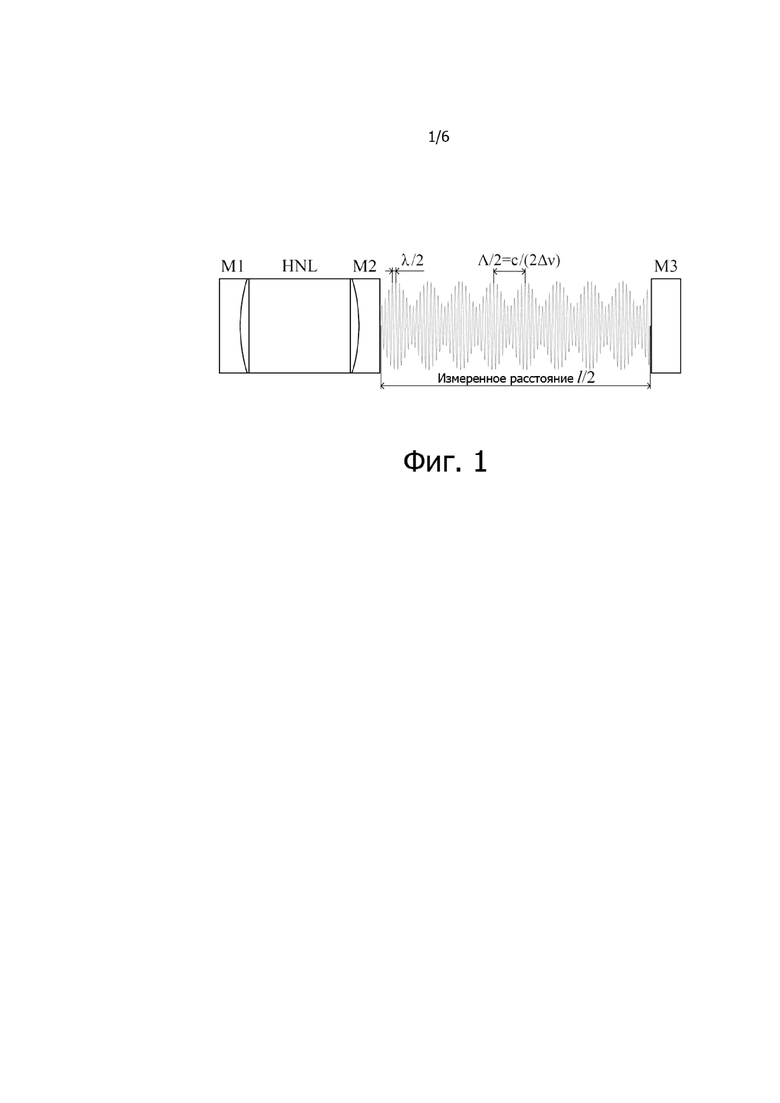
Например, существуют устройства для измерения расстояний на основе радиоуправляемых модуляторов света. Во-первых, количество пространственных периодов огибающей амплитудной модуляции (равной Λ/2, где Λ – длина волны радиоуправляемой модуляции) вычисляется (фиг.1) для грубых измерений. Для более точных измерений можно использовать фазометр. В работе "Waters, D. M., Smith, D. & Thompson, M. C., Precision phase meter, IRE Transactions on Instrumentation 1962, I-11 (2), 64–66" раскрыт фазометр, имеющий чувствительность порядка  при пространственном периоде амплитудной модуляции, например, равном 1 дм. В статье "P. Sperber, T. Stautmeister, A. Baumgartner, J. Kolbl, H. Tauscher, and J. Kellner, High accuracy short range laser meter for system calibration and installation, Thirteenth International Workshop on Laser Ranging, NASA, October 07, 2002" показано, что может быть достигнута точность порядка 0,1−0,2 мм.
при пространственном периоде амплитудной модуляции, например, равном 1 дм. В статье "P. Sperber, T. Stautmeister, A. Baumgartner, J. Kolbl, H. Tauscher, and J. Kellner, High accuracy short range laser meter for system calibration and installation, Thirteenth International Workshop on Laser Ranging, NASA, October 07, 2002" показано, что может быть достигнута точность порядка 0,1−0,2 мм.
С другой стороны, существуют измерительные приборы, в которых используется интерферометрический метод определения расстояний. Один такой измерительный прибор раскрыт в работе "O’Brien J. F., Neat G. W., Micro-precision interferometer pointing control system, Proceedings of International Conference on Control Applications, 1995, pp. 464–469". Этот метод заключается в подсчете количества интерференционных полос, возникающих при отражении светового пучка от зеркала, которое может быть прикреплено к измеряемому объекту при перемещении этого зеркала от лазера в дальнюю точку. Такие измерительные устройства, обладающие интерференционной точностью (порядка доли λ/2, где λ – длина волны лазерного излучения), являются большими и требуют подвижных зеркал.
Таким образом, устройства, основанные на радиотехническом (электронном) методе не требуют подвижного зеркала, прикрепленного к измеряемому объекту, но являются в тысячи раз менее точными по сравнению с измерительными приборами, основанными на интерферометрическом методе.
Следовательно, существует необходимость в создании устройства, объединяющего преимущества устройств, выполненных на основе этих двух методов: интерферометрического метода и радиотехнического (электронного) метода. Такое новое устройство не требует подвижного зеркала, прикрепленного к измеряемому объекту, и имеет точность измерения расстояния до зеркала, прикрепленного к измеряемому объекту, порядка точности интерферометра.
Раскрытие сущности изобретения
Для того, чтобы устранить вышеупомянутые недостатки уровня техники, в одном аспекте изобретения реализован способ измерения расстояний до объекта. Способ содержит этапы, на которых излучают световой пучок лазером; отражают световой пучок от зеркала, прикрепленного к измеряемому объекту; и определяют расстояние до объекта на основе интерференционной картины между световым пучком и отраженным световым пучком при перемещении зеркала. Способ характеризуется тем, что способ дополнительно содержит этап, на котором изменяют длину резонатора лазера при определении расстояния до объекта посредством управления видностью интерференционной картины.
В одном варианте осуществления способ дополнительно содержит этап, на котором вычисляют количество интерференционных полос при перемещении зеркала резонатора.
В другом варианте осуществления способа длину резонатора лазера изменяют за счет изменения температуры резонатора лазера или ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора.
В дополнительном варианте осуществления способа лазер представляет собой многомодовый лазер. В этом случае способ дополнительно содержит этап, на котором грубо определяют значение расстояния до объекта на основании частоты межмодовых биений отраженного лазерного пучка. В этом случае способ дополнительно содержит этап, на котором изменяют длину резонатора лазера для управления точкой минимума видности интерференционной картины с использованием частоты межмодовых биений для определения грубого значения расстояния.
В другом варианте осуществления способ дополнительно содержит этап, на котором определяют точное значения расстояния до объекта на основании измерения дробной доли интерференционной полосы между световым пучком и отраженным световым пучком.
Во втором аспекте изобретения предложено устройство для определения расстояния до объекта. Устройство содержит лазер, выполненный с возможностью излучения лазерного пучка; блок фотоприемника, выполненный с возможностью формирования интерференционной картины между лазерным пучком и лазерным пучком, отраженным от зеркала, прикрепленного к объекту, за счет перемещения зеркала; и аналитический блок, выполненный с возможностью определения расстояния на основе интерференционной картины. Устройство характеризуется тем, что зеркало резонатора лазера выполнено с возможностью изменения длины резонатора для управления интерференционной картиной при вычислении количества интерференционных полос.
В другом варианте осуществления устройства лазер представляет собой многомодовый лазер, в котором аналитический блок дополнительно выполнен с возможностью определения расстояния до объекта на основе частоты межмодовых биений отраженного лазерного пучка; и резонатор лазера дополнительно выполнен с возможностью изменения своей длины с целью управления точкой минимума видности интерференционной картины с использованием частоты межмодовых биений для определения грубого значения расстояния.
В еще одном варианте осуществления аналитический блок выполнен с возможностью измерения дробной доли интерференционной полосы и определения точного значения расстояния до объекта на основании частоты межмодовых биений и дробной доли интерференционной полосы.
Краткое описание чертежей
На фиг.1 показаны принципы радиотехнического (электронного) и интерферометрического методов измерения расстояний;
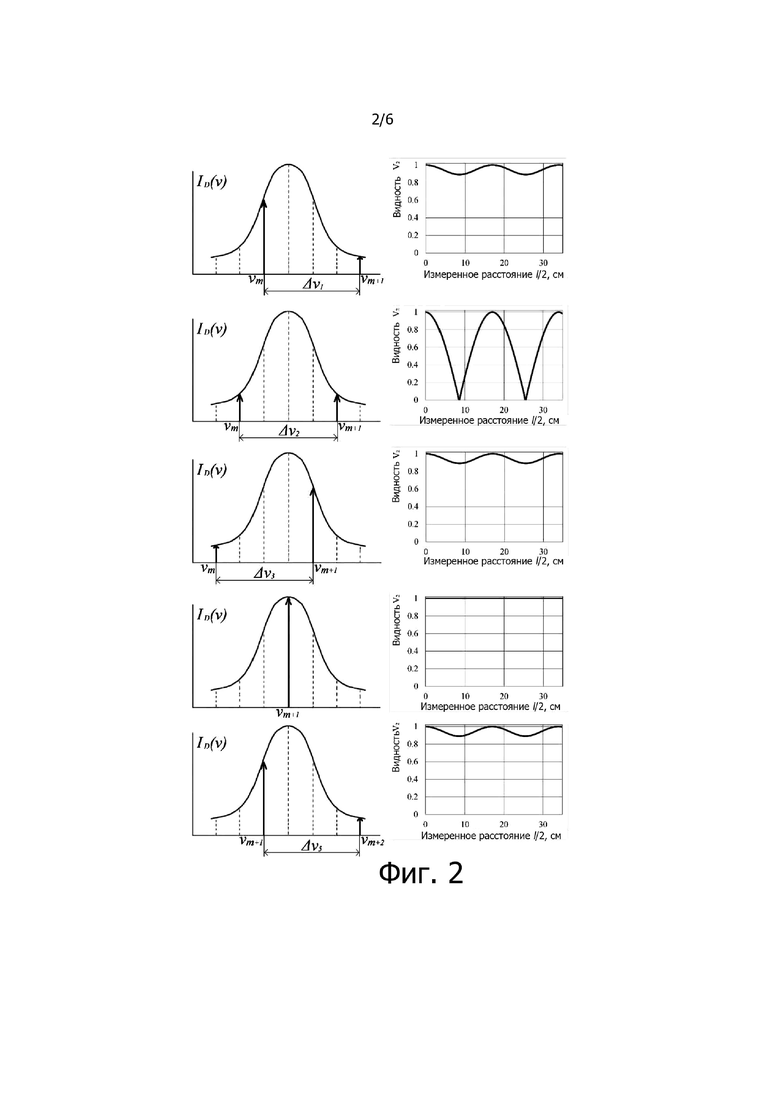
На фиг.2 показана зависимость видности интерференционной картины V2 от положения мод относительно доплеровского контура ID(ν);
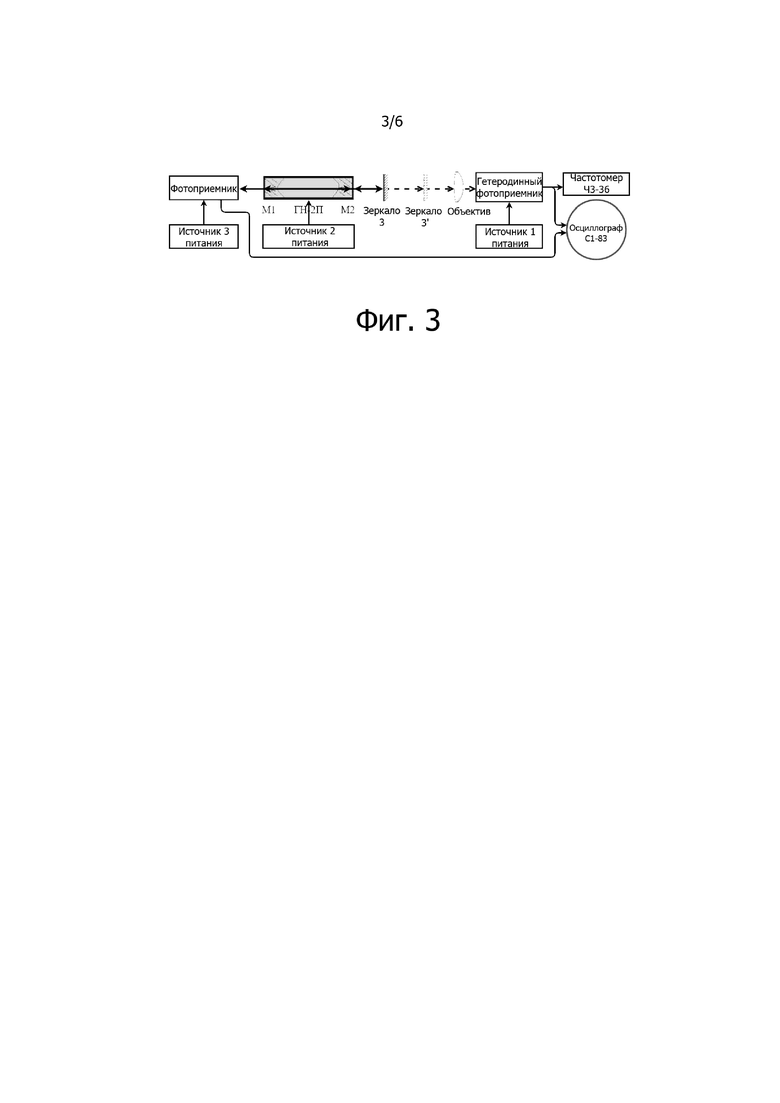
На фиг.3 показана блок-схема экспериментальной установки для измерения расстояний;
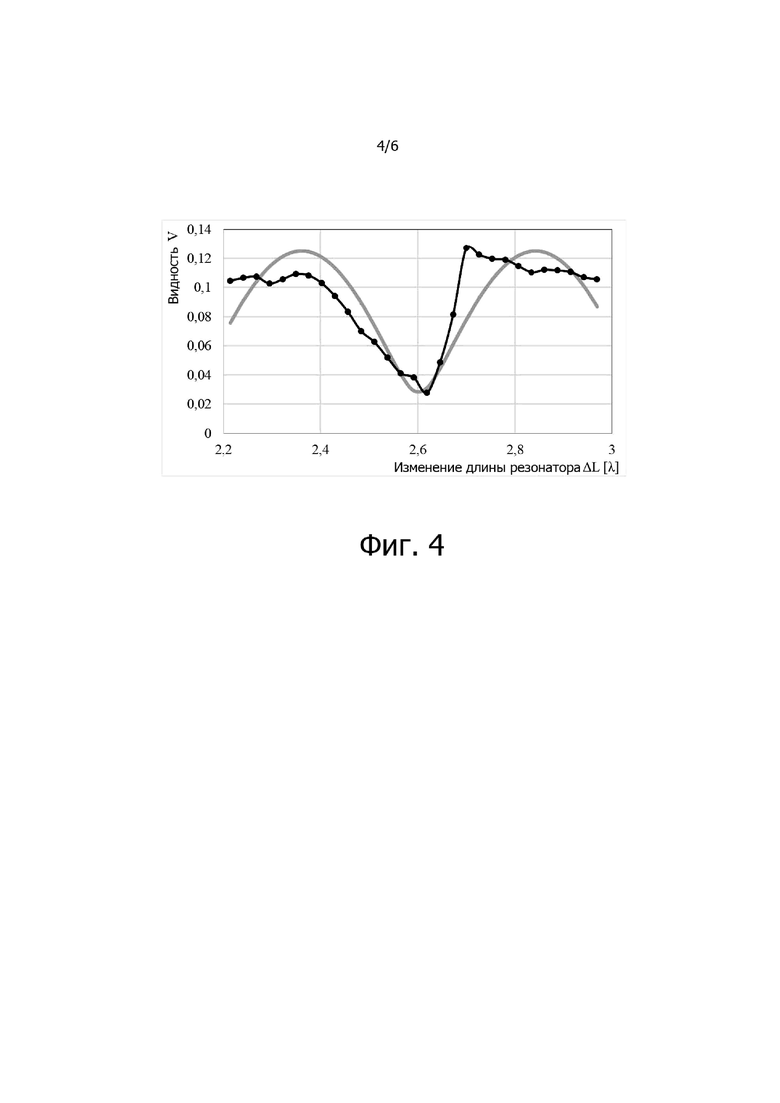
На фиг.4 показана схема, иллюстрирующая экспериментальную и теоретическую зависимости видности от изменения длины резонатора;
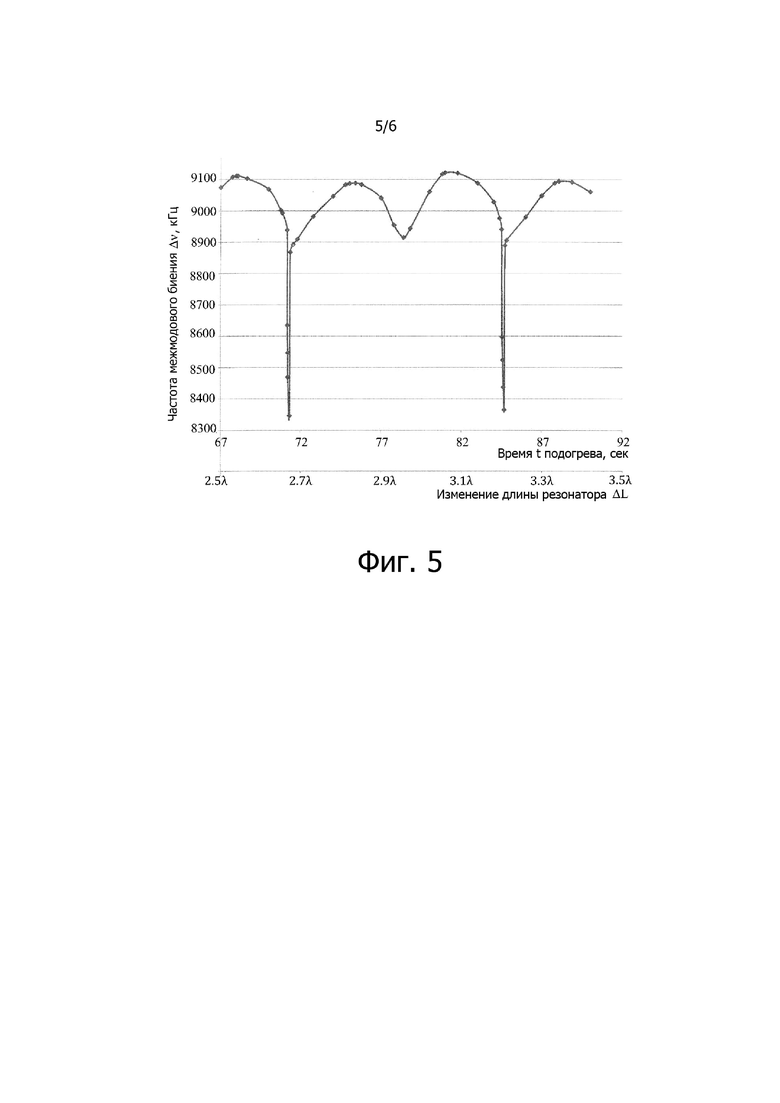
На фиг.5 показана схема, иллюстрирующая экспериментальную зависимость частоты межмодовых биений от изменения длины резонатора; и
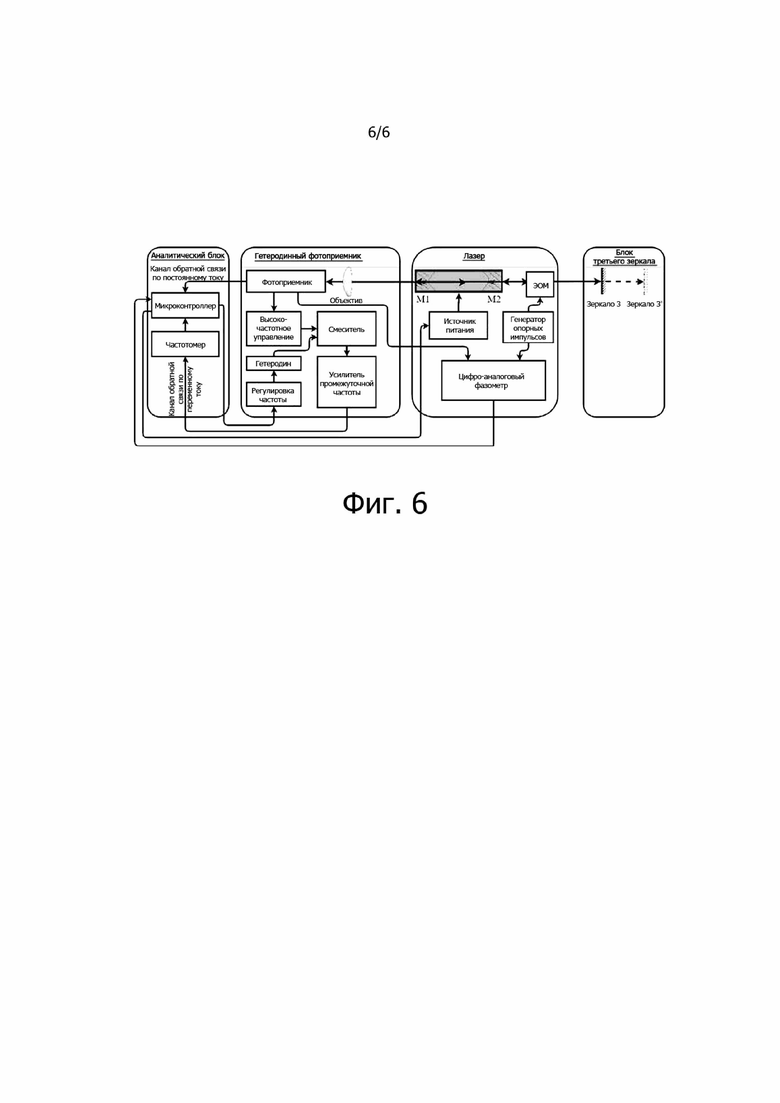
На фиг.6 показана блок-схема лазерного интерферометрического измерителя расстояний и перемещений согласно варианту осуществления изобретения.
Осуществление изобретения
Концепция изобретения
Собственные частоты лазера и их использование
Устройство согласно изобретению объединяет радиотехнический (электронный) и интерферометрический методы определения абсолютного расстояния до отражающего объекта. Они основаны на физическом существовании амплитудной модуляции лазерного излучения, что является следствием наличия оптических мод νj, где  – количество генерируемых мод, m – целое число, m0 – число генерируемых мод, которое определяется параметрами лазерного излучателя: длиной резонатора лазера, свойствами его активной среды, кривизной его зеркал и т.д.
– количество генерируемых мод, m – целое число, m0 – число генерируемых мод, которое определяется параметрами лазерного излучателя: длиной резонатора лазера, свойствами его активной среды, кривизной его зеркал и т.д.
Собственные частоты лазера, в котором происходит генерация, определяются из условия кратности набега фазы 2π волны после прохождения двойного оптического пути между зеркалами резонатора 2L:
 , (2.1)
, (2.1)
где m – количество продольных мод, n – показатель преломления активной среды, L – длина резонатора лазера, c – скорость света в вакууме, θq – фазовый сдвиг, обусловленный наличием поперечных электромагнитных мод (TEM) и кривизной зеркал резонатора лазера.
Из соотношения (2.1) можно получить формулу для собственных частот лазера:
 , (2.2)
, (2.2)
Фазовый сдвиг θq в этом случае является незначительным из-за отсутствия TEM более высокого порядка, таких как TEM0q и TEMq0. В этом случае TEM00 является основной модой. Согласно (2.2) управлять частотой лазерного излучения можно путем изменения длины резонатора лазера. Это можно сделать, например, путем изменения температуры резонатора лазера или изменения ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора. Кроме того, при увеличении длины резонатора лазера частота каждой генерируемой моды уменьшается. В противном случае, при уменьшении температуры резонатора или при увеличении ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора, длина резонатора лазера уменьшается, что приводит к увеличению частоты каждой оптической моды. Эта особенность используется для создания лазерного интерферометрического измерителя расстояний и перемещений.
Во-первых, для грубого измерения расстояния до зеркала, прикрепленного к измеряемому объекту, рассчитывается число пространственных периодов Λ/2 огибающей оптически модулированного сигнала, возникающих при наличии нескольких оптических мод лазерного оптического излучения. В этом случае используются свойства интерферометра, работающего на нескольких оптических частотах, в частности, зависимость видности интерференционной картины V от соотношения измеряемой длины, длины резонатора лазера, частоты межмодовых биений и свойств активной среды. В этом случае частота межмодовых биений изменяется за счет увеличения длины резонатора лазера, например, при увеличении температуры резонатора или при уменьшении ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора.
Во-вторых, зная частоту межмодовых биений и число пространственных периодов огибающей оптического модулированного сигнала, рассчитывается количество интерференционных полос, образованных в интерферометре с помощью лазера и зеркала, прикрепленного к измеряемому объекту. Затем устройства определяют дробную долю интерференционной полосы с использованием измерителя дробной доли интерференционной полосы.
Двухмодовый режим
 , (2.3)
, (2.3)
и
 , (2.4)
, (2.4)
где U10 и U20 – амплитуды двух волн, например, в опорном плече интерферометра, ν1 и ν2 – собственные частоты лазера для двух мод, k1 = 2πν1/c и k2 = 2πν2/c – волновые числа мод, t – время распространения волны, x – направление распространения волны.
Видность интерференционной картины можно найти для одной моды лазерного излучения с частотой ν1. Однако, чтобы найти ее, необходимо решить задачу суперпозиции колебаний с одинаковой частотой, но с разными фазами. В результате интенсивность интерференционной картины имеет вид:
 , (2.5)
, (2.5)
где  – амплитуда волны в измерительном плече, l – разность оптических путей. Интенсивность в максимуме интерференционной картины
– амплитуда волны в измерительном плече, l – разность оптических путей. Интенсивность в максимуме интерференционной картины  и в минимуме
и в минимуме  . Поэтому видность имеет вид
. Поэтому видность имеет вид
 (2.6)
(2.6)
где параметры
и
представляют собой отношения интенсивностей интерферирующих волн. Видность V1 = 1 только тогда, когда интерферирующие волны имеют одинаковую интенсивность.
Для двух мод лазерного излучения интенсивность в интерференционной картине равна сумме интенсивностей отдельных мод
 (2.9)
(2.9)
Параметр δ1, который учитывается в (2.7), определяется устройством разделения световых волн (третий внешний отражатель в трехзеркальном интерферометре). Кроме того, он не зависит от номера моды, то есть δ1 = δ2 = δ.
Для этих двух мод можно найти видность интерференционной картины. Чтобы сделать это, выражение (2.9) можно переписать, используя и тригонометрические преобразования, и то, что  – среднее значение частот,
– среднее значение частот,  – частота межмодовых биений:
– частота межмодовых биений:
 (2.10)
(2.10)
где были введены подстановки


Так как k >> K, то согласно (2.10),
где I достигает локального максимума Imax при l = lmax ≈ (φ(lmax) + 2πp)/k и локального минимума Imin при l = lmin ≈ (φ(lmin) + π(2p + 1))/k, где p – целое число. Амплитуда  остается приблизительно постоянной между соседними полосами интенсивности лазерного излучения.
остается приблизительно постоянной между соседними полосами интенсивности лазерного излучения.
В случае, если lmin ≈ lmax ≈ l, (2.11), (2.12), B, M1, K и M2 можно подставить в определение видности  :
:
где функция
описывает зависимость видности от геометрической разности хода l интерферирующих волн, разности ∆ν их частот и их интенсивностей  и
и  Таким образом, при l ≈ 2Lw (w –целое число) V(l) ≈ V1. Другими словами, при синфазной суперпозиции двух мод, видность интерференционной картины V(l) совпадает с видностью интерференционной картины, сформированный двумя световыми волнами V1 одинаковой частоты согласно (2.6).
Таким образом, при l ≈ 2Lw (w –целое число) V(l) ≈ V1. Другими словами, при синфазной суперпозиции двух мод, видность интерференционной картины V(l) совпадает с видностью интерференционной картины, сформированный двумя световыми волнами V1 одинаковой частоты согласно (2.6).
Точность найденных значений видности
Рассмотрим абсолютную алгоритмическую погрешность определения видности интерференционной картины δV, основываясь на изменении амплитуды  между двумя соседними экстремумами интенсивности I: максимальной интенсивности Imax при lmax и минимальной интенсивности Imin при lmin. Эту погрешность можно получить, используя метод частных производных
между двумя соседними экстремумами интенсивности I: максимальной интенсивности Imax при lmax и минимальной интенсивности Imin при lmin. Эту погрешность можно получить, используя метод частных производных
где rmax и rmax – значения амплитуды  при lmax и lmin, соответственно.
при lmax и lmin, соответственно.
Таким образом, относительная алгоритмическая погрешность

Доплеровский контур
При реализации изобретения He-Ne-лазер использовался в конструкции устройства. Длина волны лазера λ=633 нм, ширина доплеровского контура усиления ∆νD=1,5 ГГц. Доплеровский контур может содержать несколько оптических мод в зависимости от длины L резонатора лазера (2.2). Двухмодовый режим может быть реализован для длины резонатора лазера L =10-30 см.
Изменение температуры резонатора или ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора, смещает положение оптических мод относительно доплеровской кривой усиления и, следовательно, приводит к изменению амплитуды каждой оптической моды в зависимости от температуры резонатора и ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора. Графики допустимых положений продольных мод относительно доплеровской кривой усиления, смещения которых обратно пропорциональны увеличению длины резонатора на одинаковые значения, показаны в левой половине фиг.2. Кроме того, соответствующие графики зависимости видности V2(l) от измеренного расстояния от лазера до зеркала, прикрепленного к измеряемому объекту l/2, показаны в правой половине фиг.2.
Соотношение 
 между интенсивностями
между интенсивностями  и
и  двух оптических мод νm и νm+1 определяет значения V2min видности V2 в локальных минимумах, а именно
двух оптических мод νm и νm+1 определяет значения V2min видности V2 в локальных минимумах, а именно
Согласно (2.2) частота межмодовых биений для двухмодового лазера представляет собой
где n(ν) – показатель преломления, зависящий от частоты ν из-за дисперсионных характеристик активной среды лазера.
Для того чтобы найти эту зависимость, вводится комплексная электрическая восприимчивость среды
 (2.19)
(2.19)
где  представляют собой, соответственно, действительную и мнимую части электрической восприимчивости соответственно, и i – мнимая единица. Согласно уровню техники условие (2.2) генерации лазерного излучения может быть представлено в следующей скорректированной форме:
представляют собой, соответственно, действительную и мнимую части электрической восприимчивости соответственно, и i – мнимая единица. Согласно уровню техники условие (2.2) генерации лазерного излучения может быть представлено в следующей скорректированной форме:
где  – фазовая добавка, определяемая фазовыми сдвигами, возникающими при отражении света от зеркал резонатора, а также кривизной зеркал резонатора лазера и расстоянием между зеркалами резонатора. Действительная часть электрической восприимчивости χ’ определяется экспериментально путем измерения частоты межмодовых биений во время настройки длины резонатора лазера.
– фазовая добавка, определяемая фазовыми сдвигами, возникающими при отражении света от зеркал резонатора, а также кривизной зеркал резонатора лазера и расстоянием между зеркалами резонатора. Действительная часть электрической восприимчивости χ’ определяется экспериментально путем измерения частоты межмодовых биений во время настройки длины резонатора лазера.
Экспериментальное исследование элементов измерителя расстояний и перемещений
Рассмотрим блок-схему экспериментальной установки (фиг.3), которая использовалась для исследования зависимостей видности интерференционной картины и изменения частоты межмодовых биений при изменении длины резонатора при нагреве резонатора лазера или уменьшении ширины кристалла пьезоэлектрического преобразователя, прикрепленного к зеркалу резонатора.
Коллимированный пучок формируется зеркалами M1 и M2 лазера (который имеет свой собственный управляемый источник 2 питания) и падает на частично отражающее зеркало 3, закрепленное на измерительной рейке. Часть пучка проходит через зеркало 3 и фокусируется на гетеродинный фотоприемник (подсоединенный к своему источнику 1 питания). Сигнал с выхода гетеродинного фотоприемника поступает на осциллограф и частотомер. Часть пучка, отраженная от зеркала 3, возвращается в лазер и образует трехзеркальный резонатор интерферометра, сигнал из которого подается на широкополосный фотоприемник, имеющий свой собственный источник 3 питания. Широкополосный фотоприемник вырабатывает сигнал, который исследуется на осциллографе. Таким образом, с правой стороны этой блок-схемы исследована зависимость изменения частоты межмодовых биений от времени нагрева лазера, а с левой стороны блок-схемы – зависимость видности от времени нагрева лазера при фиксированном положении зеркала.
Лазер OKG-16 использовался в схеме трехзеркального интерферометра, где световой пучок направлялся на зеркало 3, затем отражался обратно в резонатор лазера и, наконец, попадал на широкополосный фотоприемник, где, в результате, световые пучки, отраженные от зеркала M2 и зеркала 3, интерферировали друг с другом. Затем выходной сигнал сигнала фотоприемника анализировался на осциллографе.
Таким образом, была получена зависимость видности от изменения длины резонатора (фиг.4). Более того, использовались предположения, что изменение длины резонатора происходит по линейному закону во времени. Видность интерференционной картины V(l) изменяется от 0,02 до 0,14. Резкое изменение видности интерференционной картины V(l) в точке минимума используется для оптимальной настройки частоты межмодовых биений при измерении расстояния l (фиг.1, фиг.4).
Рассмотрим экспериментально полученный график зависимости частоты межмодовых биений от изменения длины резонатора (фиг.5). Изменение частоты межмодовых биений происходит в диапазоне между 8,3 МГц и 9,2 МГц является периодическим (период равен λ /2, где λ = 633 нм). Наблюдаемый характер изменения частоты межмодовых биений связан с формой доплеровского контура и дисперсионными характеристиками активной среды (2.19). Эта особенность используется для управления разностью между частотами генерируемых мод.
Разработка схемы интерферометрического измерителя
Предложенное устройство (фиг.6) состоит из четырех блоков: лазерного блока, блока зеркала 3, блока гетеродинного фотоприемника и аналитического блока. Зеркала M1, M2 формируют пучок лазерного излучения, который направляется через электрооптический модулятор (ЭОМ) и затем падает на зеркало 3, прикрепленное к измеряемому объекту, и отражается назад. Точность устройства может быть увеличена за счет использования экранирующих трубок с оптическими окнами между электрооптическим модулятором (ЭОМ) и зеркалом 3. Отраженный пучок лазерного излучения фокусируется линзой на широкополосном фотоприемнике. Микроконтроллер принимает интерференционный сигнал через канал обратной связи по постоянному току и частоту сигнала межмодовых биений через канал обратной связи по переменному току. Электрооптический модулятор (ЭОМ) подключен к генератору опорных сигналов, при этом его сигнал и сигнал широкополосного фотоприемника принимаются с помощью цифро-аналогового фазометра. Цифро-аналоговый фазометр служит для определения дробной доли интерференционной полосы. С цифро-аналогового фазометра сигнал подается в микроконтроллер, который отвечает за формирование сигнала, для оптимальной настройки лазера путем управления изменением длины резонатора. Сигнал изменения длины резонатора принимается источником питания лазера. Сигнал с частотой гетеродина поступает в регулятор частоты, микроконтроллер и смеситель. Кроме того, другой сигнал, сформированный путем высокочастотного управления, также принимается смесителем. Высокочастотная система управления получает сигнал из широкополосного фотоприемника. Выход смесителя подключен к входу усилителя промежуточной частоты, выходной сигнал которого подается на частотомер и анализируется микроконтроллером.
Если заданная точность измерений расстояния и перемещения равна λ /2, где λ – длина волны излучения, то необходимо проводить измерения частоты межмодовых биений со следующей точностью:
 . (2.21)
. (2.21)
Точность измерения расстояний и перемещений возрастает с увеличением чувствительности определения сдвига интерференционной картины.
Таким образом, рассмотренная технология объединяет радиотехнический (электронный) метод определения расстояний и интерференционный метод определения перемещений. Использование измерителя дробной доли интерференционной полосы (состоящего из таких элементов, как электрооптический модулятор (ЭОМ), генератор опорных сигналов и цифро-аналоговый фазометр) позволяет значительно повысить точность измерения расстояния.
Рассмотрим применение предложенного устройства. Эти результаты могут быть применены в таких областях, как лазерная технология, устройства для точного измерения геометрических величин, управление охраной окружающей среды, технологии предотвращения и устранения ущерба от стихийных бедствий и техногенных чрезвычайных ситуаций, транспортно-космическая система (технологии для создания прецизионных высокоскоростных транспортных средств и интеллектуальных систем управления для нового дистанционного зондирования и средства фундаментальных исследований), технологии наноустройств и микросистемной техники.
В соответствии с этой схемой можно разработать устройство, предназначенное для использования на космической станции для обнаружения гравитационных волн с помощью улучшенной космической антенны, использующей принцип лазерного интерферометра (ELISA), которая должна быть построена в 2034 году.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДЛИН | 2014 |
|
RU2561771C1 |
| Голографический способ формирования радиочастотных электрических колебаний на дискретных частотах | 2023 |
|
RU2813988C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ВЫСОКОСКОРОСТНЫХ ОТКРЫТЫХ ОПТИЧЕСКИХ КАНАЛОВ СВЯЗИ С ПОДВОДНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2538449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДОВОЙ ДИСПЕРСИИ ОПТИЧЕСКИХ ВОЛНОВЕДУЩИХ СИСТЕМ | 2006 |
|
RU2308012C1 |
| Лазерный интерферометр для измерения динамических деформаций образцов | 1983 |
|
SU1272105A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2057285C1 |
| ЛАЗЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИЙ ДЕТЕКТОР ГРАВИТАЦИОННО-ИНДУЦИРОВАННОГО СДВИГА ЧАСТОТЫ ГЕНЕРАЦИИ | 1997 |
|
RU2116659C1 |
| Способ измерения радиуса кривизны сферических лазерных зеркал | 1980 |
|
SU1059420A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ДВУХМОДОВОГО He-Ne/CH ЛАЗЕРА | 2006 |
|
RU2316863C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СЕНСОРНАЯ СИСТЕМА | 2012 |
|
RU2498226C1 |
Изобретение относится к области измерительной техники и касается способа измерения расстояния до объекта. Способ содержит этапы, на которых излучают световой пучок с помощью многомодового лазера, отражают световой пучок от прикрепленного к объекту зеркала, формируют интерференционную картину между световым пучком и отраженным световым пучком, формируют интерференционный сигнал, соответствующий интенсивности интерференционной картины. При этом определяют грубое значение расстояния до объекта на основании частоты межмодовых биений светового пучка и видности интерференционной картины. Кроме того, выполняют электрооптическую модуляцию светового пучка опорным сигналом, определяют разность фаз между интерференционным сигналом и опорным сигналом, измеряют дробную долю интерференционной полосы между световым пучком и отраженным световым пучком на основании найденной разности фаз и определяют точное значение расстояния до объекта на основе измеренной дробной доли интерференционной полосы между световым пучком и отраженным световым пучком. Технический результат заключается в повышении точности измерений. 2 н. и 4 з.п. ф-лы, 6 ил.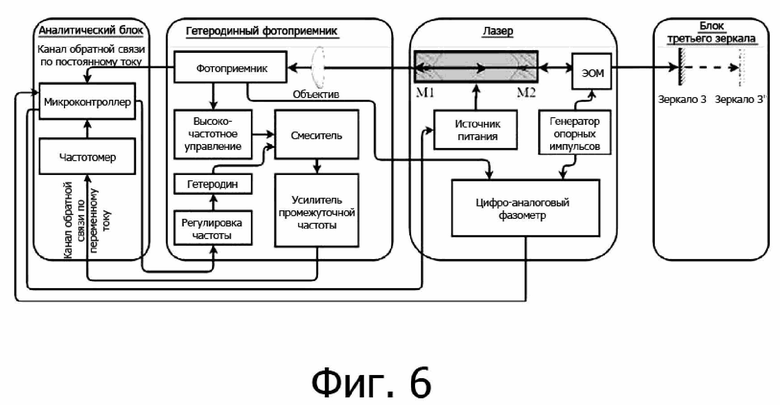
1. Способ измерения расстояния до объекта, содержащий этапы, на которых:
излучают световой пучок с помощью лазера, имеющего зеркала резонатора, причем лазер представляет собой многомодовый лазер;
отражают световой пучок от зеркала, прикрепленного к объекту;
формируют интерференционную картину между световым пучком и отраженным световым пучком;
формируют интерференционный сигнал, соответствующий интенсивности интерференционной картины;
определяют грубое значение расстояния до объекта на основании частоты межмодовых биений светового пучка и видности интерференционной картины;
вычисляют количество интерференционных полос в интерференционной картине с использованием перемещения зеркала; и
определяют расстояние до объекта на основании количества интерференционных полос,
отличающийся тем, что
выполняют электрооптическую модуляцию светового пучка опорным сигналом;
определяют разность фаз между интерференционным сигналом и опорным сигналом;
измеряют дробную долю интерференционной полосы между световым пучком и отраженным световым пучком на основании найденной разности фаз; и
определяют точное значение расстояния до объекта на основе измеренной дробной доли интерференционной полосы между световым пучком и отраженным световым пучком.
2. Способ по п.1, в котором перемещение зеркал резонатора достигается за счет изменения длины резонатора лазера.
3. Способ по п.2, в котором изменение длины резонатора включает в себя изменение температуры резонатора лазера или ширины кристалла пьезоэлектрического преобразователя, прикрепленного к одному или более зеркалам резонатора.
4. Устройство для измерения расстояния до объекта, содержащее:
лазер с резонатором, имеющим зеркала резонатора, причем лазер выполнен с возможностью излучения многомодового светового пучка;
блок фотоприемника, выполненный с возможностью формирования интерференционной картины между световым пучком и световым пучком, отраженным от зеркала, прикрепленного к объекту;
аналитический блок, выполненный с возможностью вычисления количества интерференционных полос в интерференционной картине с использованием перемещения зеркала, определения грубого расстояния до объекта на основании частоты межмодовых биений отраженного светового пучка и видности интерференционной картины и определения расстояния до объекта на основании количества интерференционных полос,
отличающееся тем, что
устройство дополнительно содержит:
электрооптический модулятор (ЭОМ), установленный между лазером и зеркалом, прикрепленным к объекту;
генератор опорных сигналов, выход которого подключен к ЭОМ;
цифроаналоговый фазометр (ЦАФ), один вход которого подключен к широкополосному фотоприемнику, а другой вход подключен к генератору опорных сигналов;
при этом выход ЦАФ подключен к аналитическому блоку, который дополнительно выполнен с возможностью измерения дробной доли интерференционной полосы между световым пучком и отраженным световым пучком и с возможностью определения точного значения расстояния до объекта на основе измеренной дробной доли интерференционной полосы между световым пучком и отраженным световым пучком.
5. Устройство по п.4, в котором перемещение зеркал резонатора достигается за счет изменения длины резонатора лазера.
6. Устройство по п.5, в котором изменение длины резонатора лазера включает в себя изменение температуры резонатора лазера или ширины кристалла пьезоэлектрического преобразователя, прикрепленного к одному или более зеркалам резонатора.
| Ю | |||
| Б | |||
| Минин и др | |||
| "Прецизионный лазерно-интерферометрический измеритель расстояний и перемещений", ИЗВЕСТИЯ ВУЗОВ | |||
| ПРИБОРОСТРОЕНИЕ, т | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Наборный фрезер для дерева | 1922 |
|
SU892A1 |
| Dubrov M | |||
| N | |||
| "Laser Feedback and New Principle of Heterodyne Interferometry", Proceedings | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

