[0001] Настоящие варианты осуществления относятся в целом к устройствам для ухода за полостью рта и, в частности, к полусвободно вращающемуся кривошипному исполнительному устройству для предварительного напряжения и быстрого высвобождения нагружаемого пружинного толкателя для устройства для ухода за полостью рта и способ предварительного напряжения и быстрого высвобождения нагружаемого пружинного толкателя.
[0002] Что касается здоровья полости рта, человек в целом думает, что зубы чистить просто. Однако, при чистке самих зубов недостаточно хорошо очищаются межзубные промежутки. Соответственно, стоматологи рекомендуют очистку межзубных промежутков зубной нитью в дополнение к чистке щеткой. Для улучшения очистки межзубных промежутков на рынке существуют некоторые устройства, которые могут использоваться дома. Одно такое устройство, Airfloss™, создает сочетание водяных капель и воздуха, который ускоряется посредством носика для создания высокой скорости воздействия. Воздух сжимается в цилиндре поршнем, который перемещается вперед сжатой пружиной.
[0003] В версии устройства предшествующего уровня техники двигатель приводит в действие ведущую шестерню, которая имеет ограниченное число зубцов вдоль части своей периметра и взаимодействует с зубчатой рейкой, которая является частью поршня. Поворот ведущей шестерни заставляет зубчатую рейку перемещаться назад, что приводит к сжатию пружины. Как только ведущая шестерня поворачивается настолько, что более нет взаимодействия зубцов с зубчатой рейкой, поршень перемещается вперед под действием пружины. Однако этот тип устройства имеет ограничения в возможности возврата механизма в исходное состояние для повторных действий, и механизм может испытывать механические затруднения при слишком быстрой работе.
[0004] Соответственно, существует необходимость в улучшенном способе и устройстве для преодоления проблем предшествующего уровня техники.
[0005] Согласно одному аспекту приводной механизм исполнительного устройства содержит кривошипный механизм, выполненный с возможностью свободно вращаться вокруг ведущей оси. Кривошипный механизм соединяется со своей осью вращения, если скорость кривошипного механизма ниже скорости ведущей оси. В вариантах осуществления, раскрытых в настоящем документе, кривошипный механизм используется для предварительного напряжения нагружаемого пружинного толкателя, до высвобождения толкателя при максимальном напряжении пружины.
[0006] Согласно другому аспекту один вариант осуществления содержит приводной механизм, включающий в себя кривошипно-шатунный приводной механизм, который может отводить назад нагружаемый пружинный толкатель и впоследствии свободно его высвобождает. В случае, когда что-либо мешает поршню переместиться вперед полностью, приводной механизм обеспечивает, что поршень полностью перемещается вперед перед оттягиванием его назад. Приводной механизм преимущественно разрешает проблему блокировки, которая была обнаружена в известном приводном механизме предшествующего уровня техники, как рассмотрено в настоящем документе.
[0007] Согласно одному варианту осуществления полусвободно вращающееся кривошипное исполнительное устройство для устройства для ухода за полостью рта содержит камеру, нагружаемый пружинный толкатель и кривошипный механизм. Камера включает в себя главную ось, внутреннюю поверхность, имеющую упор для сжатия пружины на своем проксимальном конце, и по меньшей мере одно входное отверстие и по меньшей мере одно выходное отверстие на своем дистальном конце. Нагружаемый пружинный толкатель выполнен с возможностью работы внутри камеры вдоль главной оси между напряженным положением вблизи проксимального конца камеры и высвобожденным положением вблизи дистального конца камеры. Нагружаемый пружинный толкатель содержит (i) толкатель, имеющий дистальный конец, выполненный с возможностью герметичного перемещения во внутренней поверхности камеры вдоль главной оси, и (ii) пружину, расположенную над проксимальным концом толкателя и расположенную между упором для сжатия и дистальным концом толкателя. Пружина имеет по меньшей мере два сжатых состояния, включающих в себя первое сжатое состояние (то есть напряженное состояние), большее, чем второе сжатое состояние (то есть высвобожденное состояние), при этом под влиянием снятия нагрузки с пружины из первого сжатого состояния во второе сжатое состояние пружина приводит в действие толкатель с первой скоростью из напряженного положения в высвобожденное положение. Высвобожденное положение содержит (a) требуемое конечное положение внутри камеры в ответ на первое состояние исполнительного устройства и (b) нетребуемое конечное положение внутри камеры, отличное от требуемого конечного положения, в ответ на второе состояние исполнительного устройства, отличное от первого состояния исполнительного устройства. Кривошипный механизм соединен с нагружаемым пружинным толкателем для циклического перехода нагружаемого пружинного толкателя между напряженным и высвобожденным положениями.
[0008] Кривошипный механизм содержит по меньшей мере приводной штифт, поворотно приводимый в действие вокруг приводной оси, и кривошипный вал, выполненный с возможностью полусвободного вращения вокруг приводного вала. Кривошипный вал соединен с нагружаемым пружинным толкателем и частично приводится в действие вокруг приводной оси посредством (i) приводного штифта в первом режиме работы, содержащем нагружение пружины в первое сжатое состояние в ответ на оттягивание кривошипным валом толкателя из требуемого конечного положения в напряженное положение, (ii) нагружаемого пружинного толкателя во втором режиме работы, который содержит приведение в действие толкателя из напряженного положения в высвобожденное положение в ответ на снятие нагрузки с пружины из первого сжатого состояния во второе сжатое состояние, и (iii) приводного штифта во время третьего режима работы, в котором кривошипный вал толкает толкатель из нетребуемого конечного положения. Например, третий режим работы включает в себя по меньшей мере одно из (a) завершения неполного приведения в действие толкателя из нетребуемого конечного положения в требуемое конечное положение и (b) перемещение толкателя из нетребуемого конечного положения (например, в случае, когда толкатель останавливается за пределами требуемого конечного положения, но до напряженного положения) в ответ на толкание кривошипным валом толкателя из нетребуемого конечного положения.
[0009] Согласно другому варианту осуществления полусвободно вращающегося кривошипного исполнительного устройства первое состояние исполнительного устройства содержит преодоление высвобожденным нагружаемым пружинным толкателем трения внутри камеры и любого сопротивления по меньшей мере одного выходного отверстия, а второе состояние исполнительного устройства содержит неполное преодоление высвобожденным нагружаемым пружинным толкателем трения внутри камеры и/или любого сопротивления по меньшей мере одного выходного отверстия. В другом варианте осуществления первая скорость содержит скорость, достаточную для создания по меньшей мере минимального требуемого давления внутри камеры для выталкивания, через указанное по меньшей мере одно выходное отверстие, требуемого количества воздуха, и/или жидкости, и/или смеси воздуха и жидкости. Воздух и/или жидкость может быть введен в камеру, например, посредством указанного по меньшей мере одного входного отверстия.
[0010] В еще одном варианте осуществления первый режим работы дополнительно содержит первоначальное расположение толкателя в требуемом конечном положении внутри камеры и зацепление приводным штифтом кривошипного вала для создания толкающего усилия на кривошипный вал, вынуждая кривошипный вал, соединенный с нагружаемым пружинным толкателем, перемещать нагружаемый пружинный толкатель со второй скоростью из высвобожденного положения в напряженное положение, при этом вторая скорость меньше первой скорости. В дополнительном варианте осуществления вторая скорость содержит скорость, достаточную для поддержания требуемого рабочего цикла для нагрузки и разгрузки пружины, кроме того, для введения и последующего выталкивания требуемого количества воздуха и/или жидкости, и/или смеси воздуха и жидкости, например, соответственно через указанное по меньшей мере одно входное отверстие и указанное по меньшей мере одно выходное отверстие.
[0011] В еще одном варианте осуществления второй режим работы дополнительно содержит первоначальное расположение толкателя в напряженном положении внутри камеры, и потерю зацепления приводного штифта с кривошипным валом в ответ на (а) приведение в действие толкателя с первой скоростью из напряженного положения в высвобожденное положение и (b) приложение тянущего усилия на кривошипный вал пружиной нагружаемого пружинного толкателя. Кроме того, третий режим работы дополнительно содержит первоначальное приведение толкателя в состояние покоя в нетребуемом конечном положении внутри камеры до достижения требуемого конечного положения и зацепление приводным штифтом кривошипного вала для создания толкающего усилия на кривошипный вал, вынуждая кривошипный вал, соединенный с нагружаемым пружинным толкателем, перемещать нагружаемый пружинный толкатель со второй скоростью из нетребуемого конечного положения в требуемое конечное положение и затем далее в напряженное положение.
[0012] В одном варианте осуществления полусвободно вращающегося кривошипного исполнительного устройства кривошипный механизм дополнительно содержит соединительный элемент, соединяющий кривошипный вал и нагружаемый пружинный толкатель. Кроме того, первый конец соединительного элемента соединен с возможностью вращения с дистальным концом кривошипного вала, а второй конец соединительного элемента соединен с возможностью вращения с проксимальным концом толкателя. В другом варианте осуществления камера дополнительно содержит цилиндрическую камеру. Кроме того, указанное по меньшей мере одно входное отверстие содержит односторонний впускной клапан, а указанное по меньшей мере одно выходное отверстие содержит односторонний выпускной клапан.
[0013] В еще одном варианте осуществления полусвободно вращающееся кривошипное исполнительное устройство включает в себя приводной штифт вращательно приводимый в действие вокруг приводного вала, содержащий круглую ведущую шестерню, имеющую основную поверхность, при этом приводной штифт дополнительно отходит перпендикулярно от основной поверхности и располагается на круглой ведущая шестерня на заданном радиальном расстоянии от приводного вала. В дополнительном варианте осуществления приводной штифт, вращательно приводимый в действие вокруг приводного вала, содержит приводной кривошипный рычаг, имеющий основную поверхность, при этом приводной штифт дополнительно отходит перпендикулярно от основной поверхности и расположен на приводном кривошипном рычаге на заданном расстоянии от приводного вала. В еще одном дополнительном варианте осуществления приводной штифт, вращательно приводимый в действие вокруг приводного вала, содержит приводимую в действие круглую ведущую шестерню, имеющую основную поверхность, одностороннюю муфту (например, использующую пружину, плотно обернутую вокруг оси), первый конец которой фиксирован к штифту, отходящему перпендикулярно от основной поверхности, расположенной на круглой ведущей шестерне на заданном радиальном расстоянии от приводного вала, а второй конец односторонней муфты выполнен с возможностью однонаправленного приводного зацепления с кривошипным валом.
[0014] В другом варианте осуществления устройство для ухода за полостью рта содержит полусвободно вращающееся кривошипное исполнительное устройство, при этом указанное по меньшей мере одно выходное отверстие выполнено с возможностью вмещения носика, имеющего направляющий кончик; двигатель, выполненный с возможностью приведения в действие приводной оси; по меньшей мере один резервуар для вмещения по меньшей мере одного из жидкости и газа; блок гидронасоса для подачи по меньшей мере одного из жидкости и газа из указанного по меньшей мере одного резервуара к указанному по меньшей мере одному входному отверстию камеры; и контроллер для управления (i) работой двигателя и (ii) подачей жидкости и/или газа посредством блока гидронасоса к указанному по меньшей мере одному входному отверстию согласно по меньшей мере одному требованию к данной процедуре указанного устройства для ухода за полостью рта для выталкивания требуемого количества и/или смеси газа и/или жидкости с заданными скоростью и рабочим циклом через носик.
[0015] В еще одном варианте осуществления способ предоствления полусвободно вращающегося кривошипного исполнительного устройства для устройства для ухода за полостью рта содержит этапы, на которых предоставляют камеру, имеющую главную ось, внутреннюю поверхность с упором для сжатия пружины на ее проксимальном конце, по меньшей мере одно входное отверстие и по меньшей мере одно выходное отверстие на своем дистальном конце. Способ дополнительно содержит этап, на котором управляют нагружаемым пружинным толкателем внутри камеры вдоль главной оси между напряженным положением вблизи проксимального конца камеры и высвобожденным положением вблизи дистального конца камеры. Нагружаемый пружинный толкатель содержит (i) толкатель, имеющий дистальный конец, выполненный с возможностью перемещения во внутренней поверхности камеры вдоль главной оси, и (ii) пружину, расположенную над проксимальным концом толкателя и расположенную между упором для сжатия и дистальным концом толкателя, имеющую по меньшей мере два сжатых состояния, включающих в себя первое сжатое состояние, большее чем второе сжатое состояние. В ответ на снятия нагрузки с пружины из первого сжатого состояния во второе сжатое состояние пружина приводит в действие толкатель с первой скоростью из напряженного положения в высвобожденное положение. Высвобожденное положение содержит (a) требуемое конечное положение внутри камеры в ответ на первое состояние исполнительного устройства и (b) нетребуемое конечное положение внутри камеры, отличное от требуемого конечного положения, в ответ на второе состояние исполнительного устройства, отличное от первого состояния исполнительного устройства.
[0016] Способ дополнительно содержит чередование, посредством кривошипного механизма, нагружаемого пружинного толкателя между указанными напряженным и высвобожденным положениями. Кривошипный механизм содержит по меньшей мере приводной штифт, вращательно приводимый в действие вокруг приводного вала, и кривошипный вал, выполненный с возможностью полусвободного вращения вокруг приводного вала. Кривошипный вал соединен с нагружаемым пружинным толкателем и частично приводится в действием вокруг приводного вала посредством (i) приводного штифта в первом режиме работы, который содержит нагружение пружины в первое сжатое состояние в ответ на вытягивание кривошипным валом толкателя из требуемого конечного положения в напряженное положение, (ii) нагружаемого пружинного толкателя во втором режиме работы, который содержит приведение в действие толкателя из напряженного положения в высвобожденное положение в ответ на снятие нагрузки с пружины с переходом из первого сжатого состояния во второе сжатое состояние, и (iii) приводного штифта в третьем режиме работы, который содержит выталкивание толкателя кривошипным валом из нетребуемого конечного положения. Например, третий режим работы включает в себя по меньшей мере одно из (a) завершение неполного приведения в действие толкателя из нетребуемого конечного положения в требуемое конечное положение и (b) перемещение толкателя (84) из нетребуемого конечного положения (например, в случае, когда толкатель останавливается за пределами требуемого конечного положения, но перед напряженным положением) в напряженное положение в ответ на выталкивание кривошипным валом толкателя из нетребуемого конечного положения.
[0017] В дополнительном варианте осуществления способ включает в себя, что первое состояние исполнительного устройства содержит преодоление высвобожденным нагружаемым пружинным толкателем трения внутри камеры и любое сопротивления указанного по меньшей мере одного выходного отверстия, а второе состояние исполнительного устройства содержит неполное преодоление высвобожденным нагружаемым пружинным толкателем трения внутри камеры и/или любого сопротивления указанного по меньшей мере одного выходного отверстия. Кроме того, способ включает в себя, что первая скорость содержит скорость, достаточную для создания по меньшей мере минимального требуемого давления внутри камеры для выталкивания, через указанное по меньшей мере одно выходное отверстие, требуемого количества воздуха, и/или жидкости, и/или смеси воздуха и жидкости.
[0018] Согласно еще одному варианту осуществления первый режим работы дополнительно содержит первоначальное расположение толкателя в требуемом конечном положении внутри камеры и зацепление приводного штифта с кривошипным валом для приложения толкающего усилия к кривошипному валу, что вызывает перемещение кривошипным валом, соединенным с нагружаемым пружинным толкателем, нагружаемого пружинного толкателя со второй скоростью из высвобожденного положения к напряженному положению, при этом вторая скорость меньше первой скорости. Второй режим работы дополнительно содержит первоначальное расположение толкателя в напряженном положении внутри камеры, и потерею зацепления приводного штифта с кривошипным валом в ответ на (a) приведение в действие толкателя с первой скоростью из напряженного положения в высвобожденное положение и (b) приложение тянущего усилия к кривошипному валу. Кроме того, третий режим работы дополнительно содержит первоначальную остановку толкателя в нетребуемом конечном положении внутри камеры до достижения требуемого конечного положения и зацепление приводного штифта с кривошипным валом для приложения толкающего усилия к кривошипному валу, что вызывает перемещение кривошипным валом, соединенным с нагружаемым пружинным толкателем, нагружаемого пружинного толкателя со второй скоростью из нетребуемого конечного положения в требуемое конечное положение и далее в напряженное положение. Более того, вторая скорость содержит скорость, достаточную для поддержания требуемого рабочего цикла для нагрузки и разгрузки пружины, а также для ввода и последующего выталкивания требуемого количества воздуха, и/или жидкости, и/или смеси воздуха и жидкости.
[0019] Преимущества и выгоды станут очевидны специалистам в данной области техники при чтении и понимании следующего подробного описания.
[0020] Варианты осуществления настоящего раскрытия могут принимать вид различных компонентов и компоновок компонентов и иметь различные этапы и компоновки этапов. Соответственно, чертежи предназначены для иллюстрации различных вариантов осуществления и не должны рассматриваться как ограничивающие варианты осуществления. На чертежах подобные номера ссылочных позиций относятся к подобным элементам. Кроме того, следует заметить что чертежи могут быть выполнены не в масштабе.
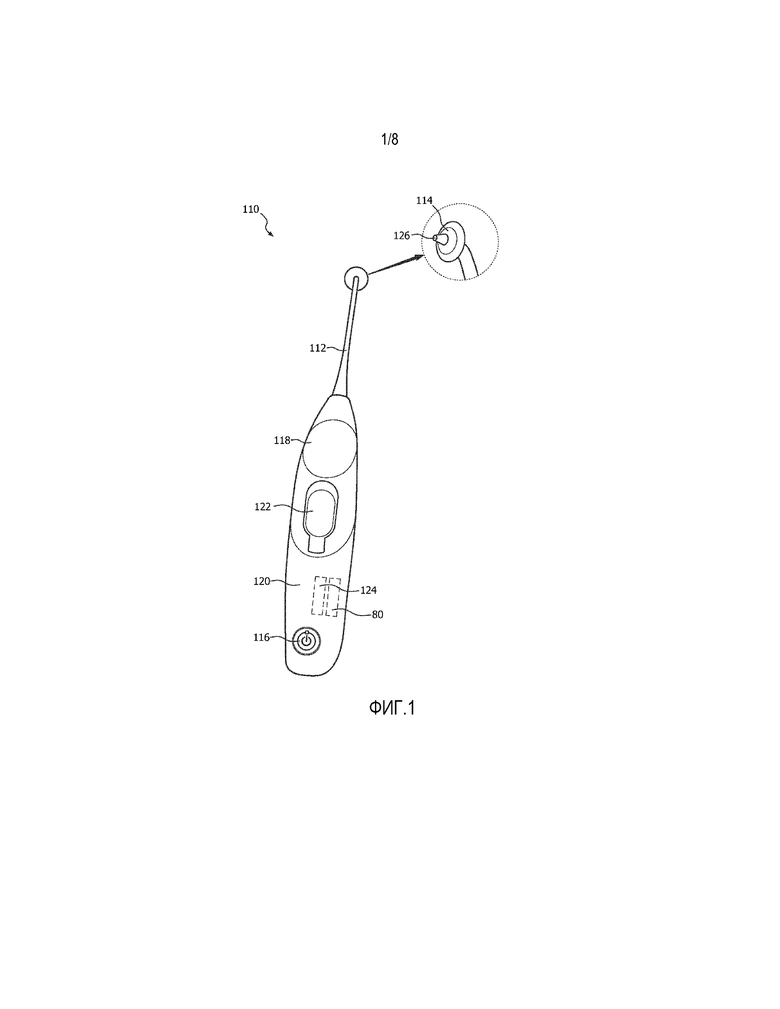
[0021] Фиг. 1 - вид в перспективе устройства для ухода за полостью рта в виде ирригатора для полости рта согласно варианту осуществления настоящего раскрытия;
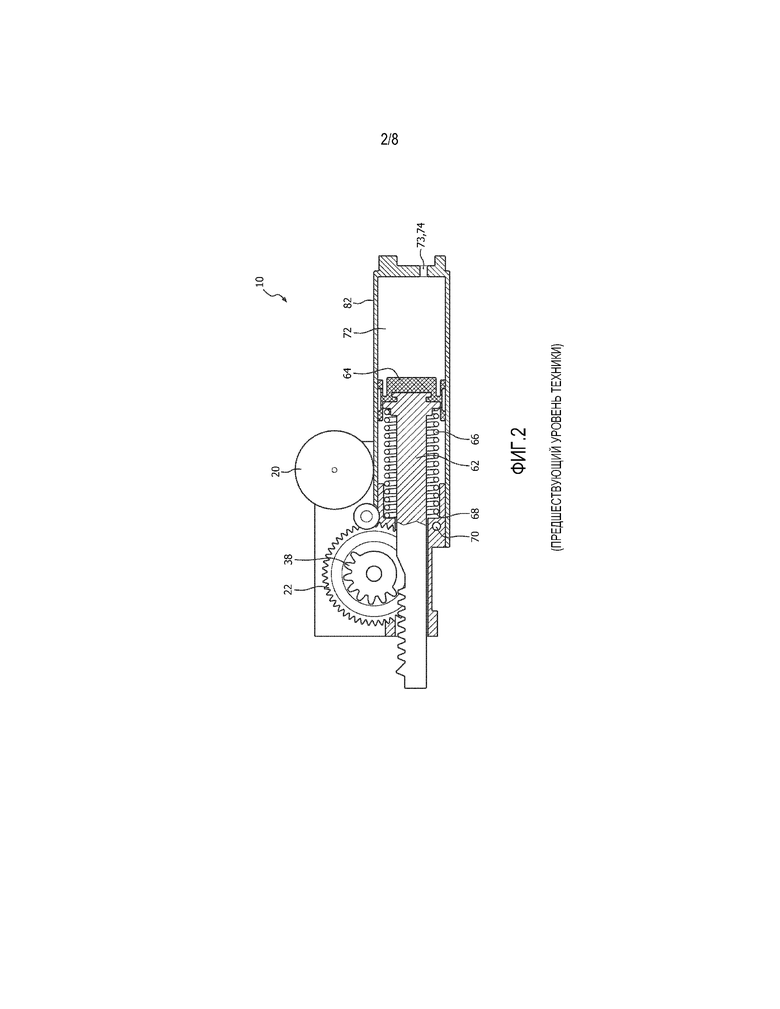
[0022] Фиг. 2 - вид сбоку с частичным разрезом, представляющий различные компоненты известного приводного устройства исполнительного устройства предшествующего уровня техники;
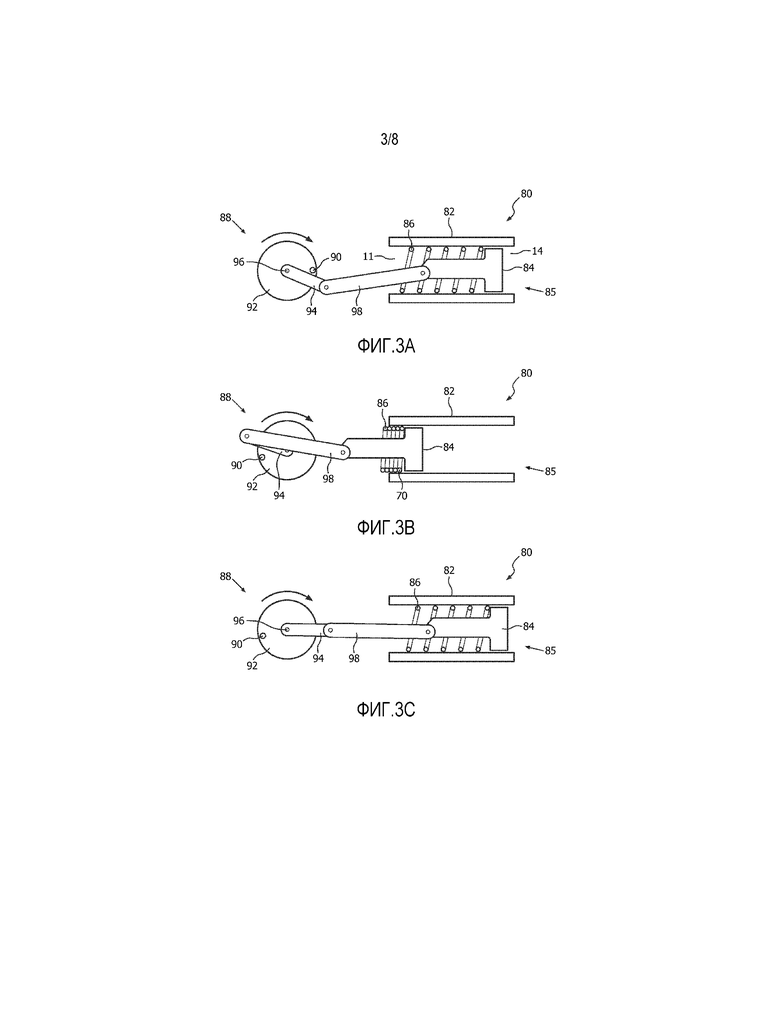
[0023] Фиг. 3A, 3B и 3C - изображения схем, иллюстрирующих компоненты полусвободно вращающегося кривошипного исполнительного устройства для предварительного напряжения и быстрого высвобождения нагружаемого пружинного толкателя для устройства для ухода за полостью рта согласно варианту осуществления настоящего раскрытия, представленные на различных стадиях предполагаемый работы приводного механизма;
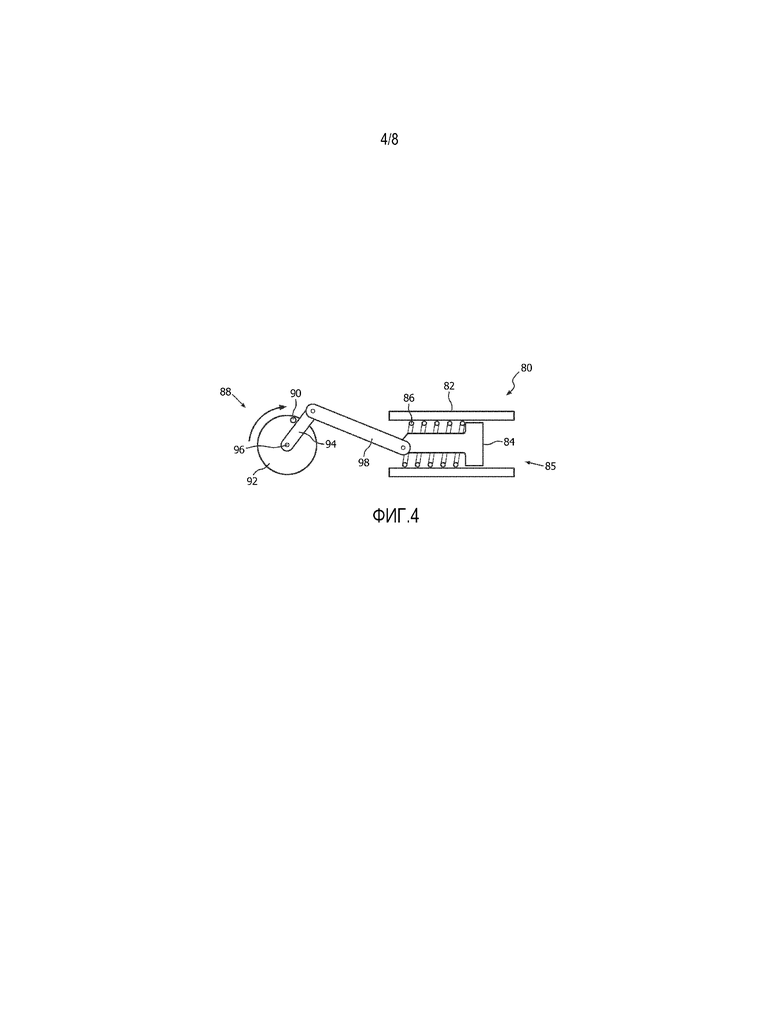
[0024] Фиг. 4 - изображение схемы, иллюстрирующей пример работы предполагаемого приводного механизма полусвободно вращающегося кривошипного исполнительного устройства, выполненного с возможностью преодоления ненормального или нетребуемого состояния толкателя приводного механизма во время работы исполнительного устройства, представленного на фиг. 3, при это ненормальное или нетребуемоей состояние возникает в ответ на силу, действующую на толкатель против направления пружины, которая может быть различной, например, из-за трения изоляции толкателя, и/или сопротивления выходного носика, и/или по другим причинам;
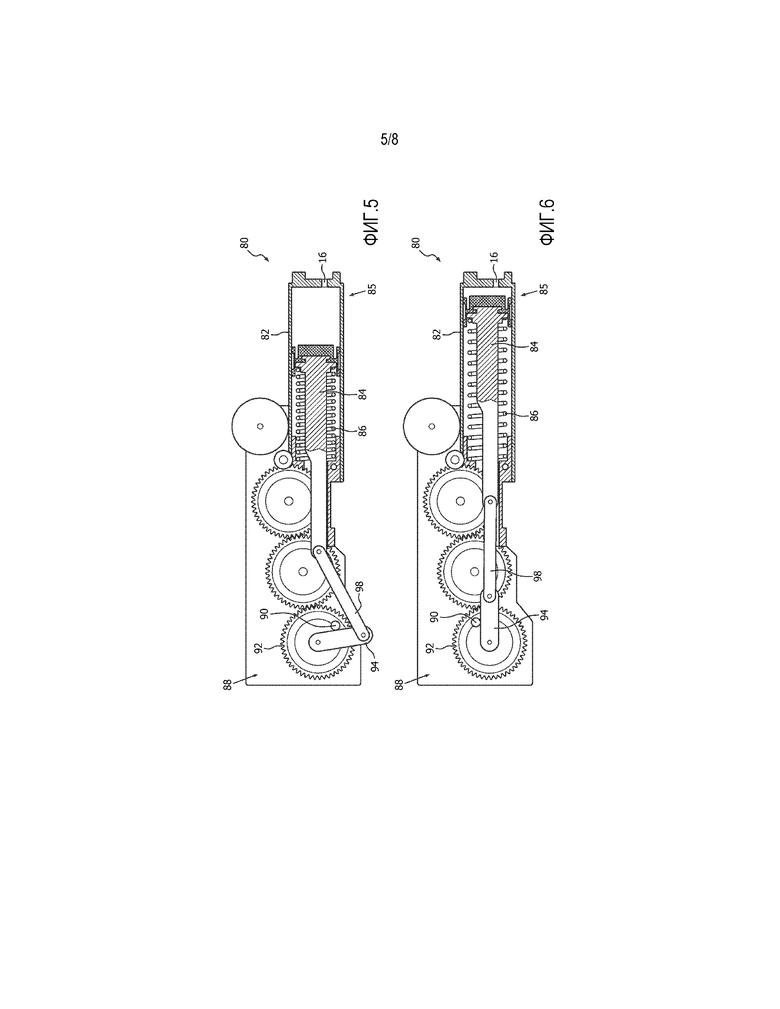
[0025] Фиг. 5 - вид в перспективе с частичным разрезом, выполненным вдоль главной оси исполнительного устройства согласно одному варианту осуществления настоящего раскрытия;
[0026] Фиг. 6 - увеличенное изображение вида в перспективе с частичным разрезом, выполненным вдоль главной оси исполнительного устройства согласно одному варианту осуществления настоящего раскрытия;
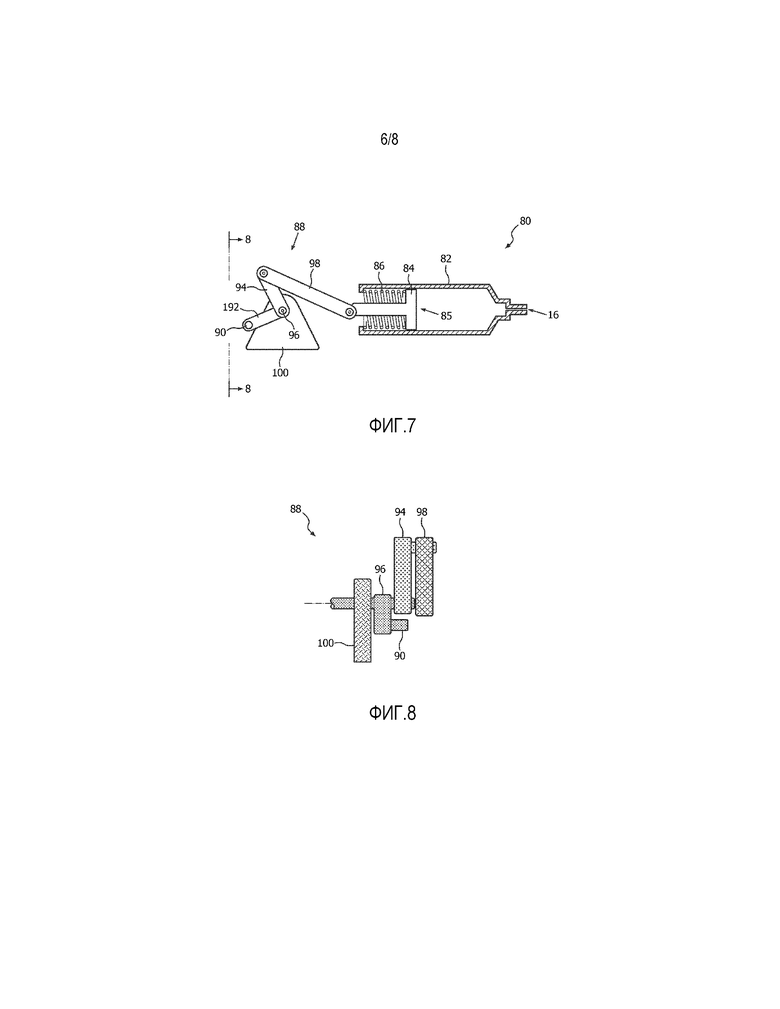
[0027] Фиг. 7 - изображение схемы, иллюстрирующей различные компоненты полусвободно вращающегося кривошипного исполнительного устройства для предварительного напряжения и быстрого высвобождения нагружаемого пружинного толкателя для устройства для ухода за полостью рта согласно другому варианту осуществления настоящего раскрытия;
[0028] Фиг. 8 - изображение схемы различных компонентов полусвободно вращающегося кривошипного исполнительного устройства, выполненное вдоль линии 8-8 фиг. 7, согласно варианту осуществления настоящего раскрытия;
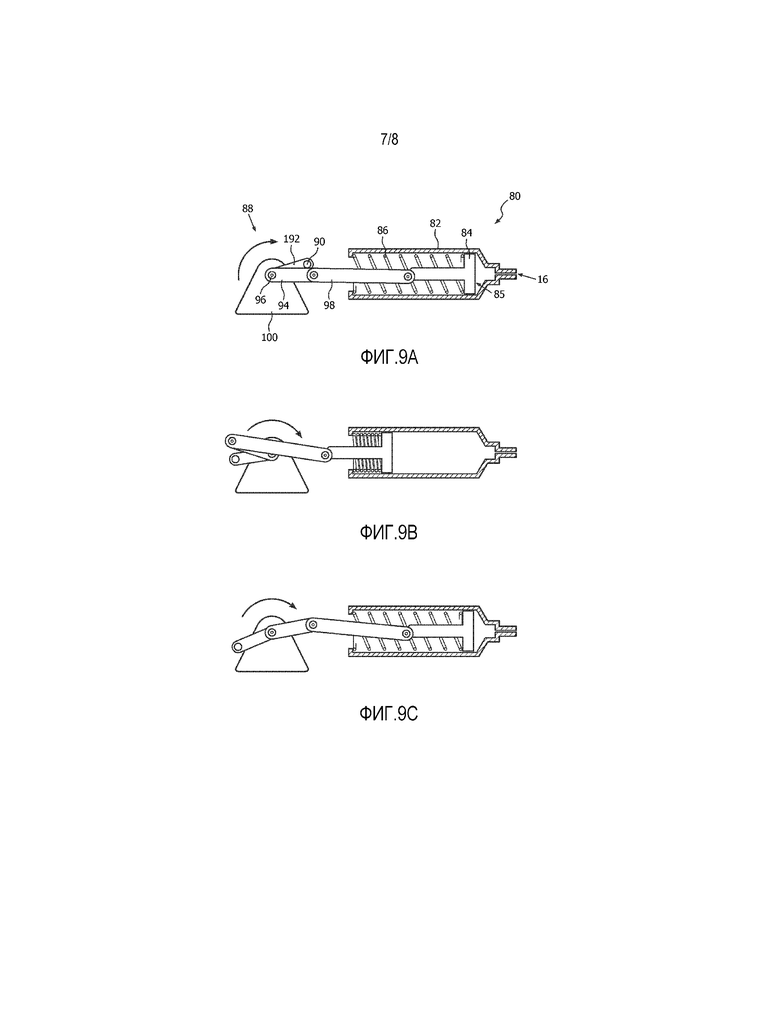
[0029] Фиг. 9A, 9B и 9C - изображения схем, иллюстрирующих различные стадии предполагаемой работы приводного механизма полусвободно вращающегося кривошипного исполнительного устройства для устройства для ухода за полостью рта фиг. 7;
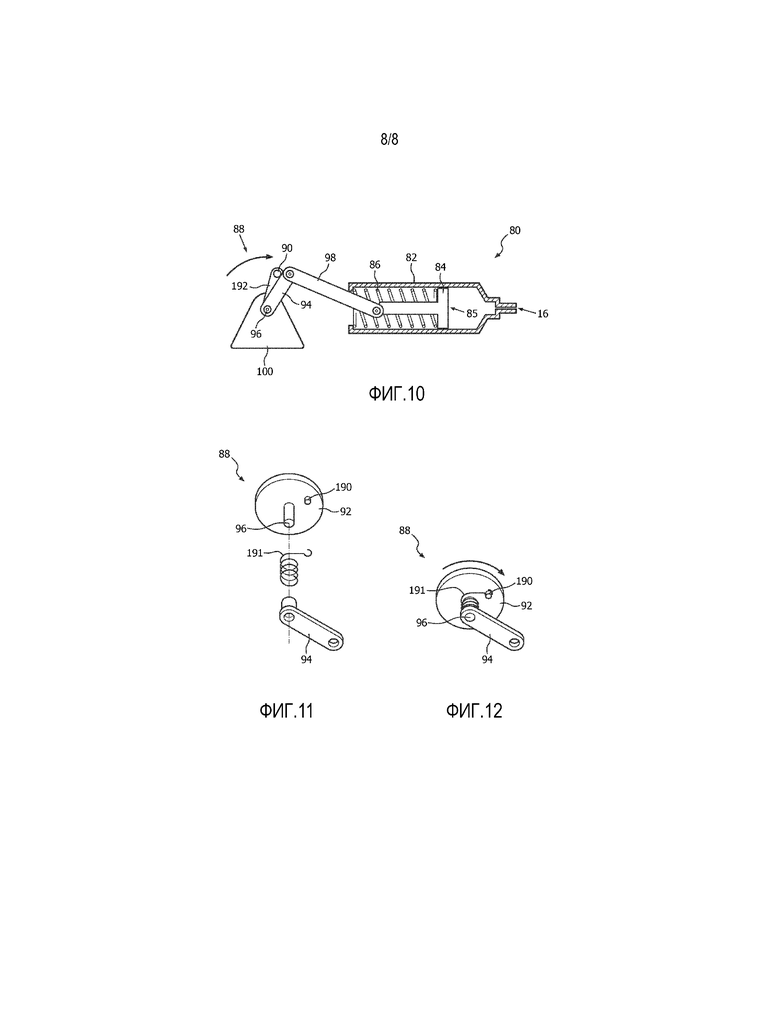
[0030] Фиг. 10 - изображение схемы, иллюстрирующей пример предполагаемой работы приводного механизма полусвободно вращающегося кривошипного исполнительного устройства, выполненного с возможностью преодоления ненормального или нетребуемого состояния толкателя приводного механизма при работе исполнительного устройства фиг. 9A-9C, при этом ненормальное или нетребуемое состояние возникает в ответ на силу, действующую на толкатель против направления пружины, которая может быть различной, например, из-за трения изоляции толкателя, и/или сопротивления выходного носика, и/или по другим причинам;
[0031] Фиг. 11 - покомпонентное схематическое изображение кривошипного механизма, который содержит приводной штифт и кривошипную конструкцию, полусвободно вращающегося кривошипного исполнительного устройства для устройства для ухода за полостью рта согласно другому варианту осуществления настоящего раскрытия; и
[0032] Фиг. 12 схематическое изображение кривошипного механизма для полусвободно вращающегося кривошипного исполнительного устройства фиг. 11 согласно варианту осуществления настоящего раскрытия.
[0033] Варианты осуществления настоящего раскрытия и его различные элементы и преимущественные подробности более подробно объяснены со ссылкой на неограничивающие примеры, которые описаны и/или проиллюстрированы на чертежах и детализированы в нижеприведенном описании. Следует заметить, что элементы, проиллюстрированные на чертежах, не обязательно представлены в масштабе, и элементы одного варианта осуществления могут использоваться с другими вариантами осуществления, как очевидно специалистам в данной области техники, даже если это не установлено явным образом в настоящем документе. Описание хорошо известных компонентов и способов изготовления могут быть опущены во избежание чрезмерного запутывания вариантов осуществления настоящего раскрытия. Примеры, используемые в настоящем документе, предназначены исключительно для облегчения понимания того, каким образом варианты осуществления настоящего раскрытия могут быть воплощены практически и для обеспечения дальнейшей возможности специалистов в данной области техники к его практическому использованию. Соответственно, примеры, представленные в настоящем документе, не должны рассматриваться как ограничивающие объем вариантов осуществления настоящего раскрытия, определенный исключительно приложенной формулой и применимым законом.
[0034] Следует понимать, что варианты осуществления настоящего раскрытия не ограничиваются конкретными способoм, протоколами, устройствами, аппаратом, материалами, применениями и т.д., описанными в настоящем документе, поскольку они могут быть различными. Также следует понимать, что используема терминология используется только для целей описания частных вариантов осуществления и не предназначена для ограничения объема вариантов осуществления, представленных в формуле изобретения. Следует помнить, что при использовании в настоящем документе и приложенной формуле слово в единственном числе включает в себя множественное число, если из контекста явно не следует иное.
[0035] Если не указано иное, все технические и научные термины, используемые в настоящем документе, имеют те же значения, как в целом понятно специалистам в той области техники, к которой относятся варианты осуществления настоящего раскрытия. Описаны предпочтительные способы, устройства и материалы, хотя могут использоваться любые способы и материалы, подобные или эквивалентные описанным в настоящем документе, в практическом использовании или тестировании вариантов осуществления.
[0036] На фиг. 1 представлен вид в перспективе устройства 110 для ухода за полостью рта в виде ирригатора для полости рта согласно варианту осуществления настоящего раскрытия. Ирригатор 110 для полости рта включает в себя носик 112, имеющий направляющий кончик 114. Ирригатор 110 для полости рта включает в себя кнопку 116 питания ВКЛ/ОТКЛ, кнопку 118 запуска, эргономичную ручку 120, по меньшей мере один резервуар 122 для жидкости, насос для микровыбросов, содержащий полусвободно вращающееся кривошипное исполнительное устройство 80, как рассмотрено в настоящем документе, и управляющую электронику 124.
[0037] При работе, когда устройство 110 включено с помощью кнопки 116 ВКЛ/ОТКЛ, нажатие кнопки 118 запуска вынуждает насос 80 работать, как рассмотрено в настоящем документе, а также для нагнетания текучей среды из резервуара 122 к отверстию 126 направляющего кончика 114 носика 112 в виде капель жидкости. Управляющая электроника 124 (или контроллер) может дополнительно содержать один или более модулей для выполнения одного или более режимов работы полусвободно вращающегося кривошипного исполнительного устройства 80 совместно с ирригатором 110 для полости рта.
[0038] На фиг. 2 проиллюстрирован вид сбоку с частичным разрезом реечного приводного механизма 10 известного устройства предшествующего уровня техники. Устройство включает в себя двигатель 20, выполненный с возможностью обеспечения высокого крутящего момента. Двигатель 20 включает в себя выходной вал (не представлен), на котором установлена ведущая шестерня 22 двигателя. Ведущая шестерня двигателя зацепляет шестерню-сателлит 38, имеющую две части, причем (i) первая часть содержит набор зубцов примерно на половине своего периметра, а (ii) вторая часть не имеет зубцов. Шестерня-саттелит 38 сопрягается с линейным реечным элементом 62, расположенным на проксимальном конце газового цилиндра 12. Реечный элемент 62 включает в себя набор расположенных на расстоянии друг от друга зубцов на своей верхней поверхности. Дистальный конец реечного элемента 62 включает в себя изолирующий элемент или толкатель 64, который герметично сопрягается с внутренней поверхностью газового цилиндра 12. От дистального конца рейки 62 на толкателе 64 отходит нажимная пружина 66 и окружает рейку по всей ее длине. Проксимальный конец 68 пружины 66 упирается в стопорный элемент 70, расположенный в корпусе цилиндра 12.
[0039] Конфигурация, представленная на фиг. 2, представляет состояние устройства, когда пружина 66 сжата, и воздух втягивается в цилиндр 12 толкателем 64, который перемещается назад шестерней зубчатой рейки 62. При дальнейшей работе, когда шестерня-сателлит 38 поворачивает настолько далеко, заканчиваются зубцы, взаимодействующие с шестерней зубчатой рейки 62, толкатель 64 выталкивается в направлении вперед (то есть, на чертеже вправо) пружиной 66, выводя воздух 72 из цилиндра 12 через односторонний впускной/выпускной клапан 73, 74, где воздух смешивается с водой с образованием капель, которые проталкиваются к носику 112.
[0040] Однако, существует некоторое ограничение для этого типа реечного зубчатого механизма, а именно, скорость повторяющихся капельных выбросов ограничена скоростью механизма, и попытки заставить работать устройство быстрее могут привести к преждевременному изнашиванию или заклиниванию реечного зубчатого механизма. Таким образом, требуется другой тип механизма для нагнетания воздуха при образовании капель. Настоящее изобретение использует полусвободно вращающееся кривошипное исполнительное устройство, которое предлагает требуемую улучшенную функциональность для устройства. Хотя поршень может перемещаться свободно вперед силой пружины, соединение с приводным механизмом никогда не теряется. В тот момент, когда необходимо оттянуть поршень, приводной механизм также обеспечивает, что ход поршня к этому времени уже завершен.
[0041] На фиг. 3A представлено изображение схемы, иллюстрирующей различные компоненты полусвободно вращающегося кривошипного исполнительного устройства 80, которое включает в себя цилиндр или камеру 82, нагружаемый пружинный толкатель 84 с пружиной 86 и кривошипный механизм 88, для предварительного напряжения и быстрого высвобождения нагружаемого пружинного толкателя для устройства для ухода за полостью рта согласно варианту осуществления настоящего раскрытия. Полусвободно вращающееся кривошипное исполнительное устройство 80 включает в себя сочетание кривошипного механизма 88 с нагружаемым пружинным толкателем 84 (или пружинным нагружаемым поршнем), имеющим приводной штифт 90 или колышек на ведущей шестерне или колесе 92. Приводной штифт 90 вызывает вращение полусвободное вращаемого кривошипного вала 94 вокруг приводной оси 96, при этом кривошипный вал 94 соединен с толкателем 84 посредством соединительного стержня 98 для выталкивания толкателя 84 вперед в надлежащее положение в случае, если толкатель застревает в фазе движения вперед, как рассмотрено далее в настоящем документе со ссылкой на фиг. 4. Как представлено на фиг. 3A, приводной штифт 90 соединен с ведущей шестерней 92 и с полусвободно вращаемым кривошипным валом 94. Полусвободно вращаемый кривошипный вал 94 установлен соосно с приводной осью 96 ведущей шестерни 92 и может вращаться независимо от ведущей шестерни 92 (то есть, он может вращаться вокруг приводной оси и полусвободно вращаться вокруг приводной оси с учетом приводного штифта).
[0042] На фиг. 3A, 3B и 3C представлены изображения нескольких схем, иллюстрирующих различные стадии предполагаемой работы приводного механизма полусвободно вращающегося кривошипного исполнительного устройства для устройства для ухода за полостью рта. На фиг. 3A для сжатия и/или нагружения пружины 86 толкатель 84 отводится посредством ведущей шестерни 92, вращающей приводной штифт 90, который зацепляет и толкает кривошипный вал 94. На фиг. 3B, при продолжении вращения ведущей шестерни 92 приводной штифт 90 толкает кривошипный вал 94 как раз за пределы положения верхней мертвой точки кривошипного вала 94, после чего пружина 86 высвобождается и принимает на себя приведение в действие кривошипного вала 94 посредством тянущего усилия. Кроме того, кривошипный вал 94 уходит от направляющего штифта 90 и теряет с ним контакт. Толкатель 84 также перемещается в результате высвобождения пружины 86 и при этом перемещается со скоростью большей, чем скорость при движении в противоположном направлении под действием кривошипного вала 94. На фиг. 3C представлено, что если не происходит блокировки толкателя 84, пружина 86 приводит толкатель 84 в его требуемое конечное положение, как представлено на чертеже. Таким образом, цикл повторяется снова, как рассмотрено выше в настоящем документе со ссылкой на фиг. 3A и 3B.
[0043] На фиг. 4 представлено изображение схемы, иллюстрирующей пример предполагаемой работы приводного механизма полусвободно вращающегося кривошипного исполнительного устройства, выполненного с возможностью преодоления ненормального или нетребуемого состояния толкателя приводного механизма при работе исполнительного устройства фиг. 3A-3C, при этом ненормальное или нетребуемое состояние возникает в ответ на силу, действующую на толкатель против направления пружины, которая может быть различной, например, из-за трения изоляции поршня, и/или сопротивления выходного носика, и/или по другим причинам. Как рассмотрено в настоящем документе со ссылкой на фиг. 3B, когда приводной штифт 90 толкает кривошипный вал 94 как раз за пределы верхнего положения мертвой точки кривошипного вала 94, пружина 86 высвобождается и принимает на себя приведение в действие кривошипного вала 94 посредством тянущего усилия. Кроме того, кривошипный вал 94 уходит от направляющего штифта 90 и теряет с ним контакт. Толкатель 84 также перемещается в результате высвобождения пружины 86. Если толкатель 84 блокируется до того, как толкатель достигает требуемого конечного положения, тогда продолжающее вращение приводного колеса 92 вызывает зацепление приводного штифта 90 за кривошипный вал 94 и приведение его в действие посредством толкающего усилия, что приводит толкатель 84 в требуемое конечное положение. Затем цикл повторяется в результате нового сжатия пружины 86, как рассмотрено выше в настоящем документе со ссылкой на фиг. 3A и 3B. Аналогично, может возникнуть ситуация, когда после высвобождения пружины толкатель перемещается в требуемое конечное положение, а затем отскакивает назад, застревая в нетребуемом конечном положении, которое возникает после требуемого конечного положения, но перед напряженным положением. В этом последнем примере продолжающееся вращение приводного колеса 92 заставляет приводной штифт 90 зацепить и привести в действие кривошипный вал 94 посредством толкающего усилия, что приводит толкатель 84 из нетребуемого конечного положения в напряженное положение.
[0044] Варианты осуществления, рассмотренные в настоящем документе, обеспечивают различные преимущества. Например, поскольку кривошипный вал 94 кривошипного механизма 88 может свободно перемещаться вперед под действием высвобожденной пружины 86, могут быть достигнуты высокие поступательные скорости толкателя, что приводит к высоким скоростям подъема давления и высоким скоростям аэрозоля/струи. Кроме того, физический контакт между поршнем или толкателем 84 и приводным механизмом кривошипного механизма никогда не теряется, так что варианты осуществления настоящего раскрытия преимущественно преодолевают и не страдают от несоответствия между компонентами приводного механизма при сжатии пружины. Кроме того, при наличии приводного штифта 90 не возникает проблема блокировки, поскольку поршень или толкатель 84 перемещается вперед, как рассмотрено в настоящем документе.
[0045] На фиг. 5 и 6 представлен вид в перспективе с частичным разрезом, выполненным вдоль главной оси исполнительного устройства 80, согласно одному варианту осуществления настоящего раскрытия.
[0046] На фиг. 7 представлено изображение схемы, иллюстрирующей различные компоненты полусвободно вращающегося кривошипного исполнительного устройства 80 для предварительного напряжения и быстрого высвобождения нагружаемого пружинного толкателя 84 для устройства для ухода за полостью рта согласно другому варианту осуществления настоящего раскрытия. Штифт 90 фиксирован посредством приводного элемента 192 к оси 96, которая приводится в действие посредством наружного крутящего момента (не представлено). Ось 96 поддерживается посредством рамы или оболочки 100. Колено 94 устанавливается на оси 96, так чтобы колено 94 могло свободно вращаться вокруг оси 96. Вращение оси 96 и колена 94 будет связанным в случае, когда колено 94 движется медленнее, чем ось 96, и штифт 90 зацепляет и затем приводит в движение колено 94. Кривошипный механизм дополнительно приводит в движение соединительный стержень 98, прикрепленный к толкателю 84. Толкатель 84 движется в цилиндре 82 и выталкивается вперед в свое наружное положение пружиной 86. На фиг. 8 представлено изображение схемы различных компонентов полусвободно вращающегося кривошипного исполнительного устройства, выполненное по линии 8-8 фиг. 7.
[0047] На фиг. 9A, 9B и 9C представлены схемы, иллюстрирующие различные стадии работы предполагаемого приводного механизма полусвободно вращающегося кривошипного исполнительного устройства 80 для устройства для ухода за полостью рта фиг. 7. На фиг. 9A для сжатия и/или нагружения пружины 86 толкатель 84 оттягивается посредством приводного элемента 192, вращающего приводной штифт 90, который зацепляет и толкает кривошипный вал 94. На фиг. 9B представлено, что при дальнейшем вращении приводного элемента 192 приводной штифт 90 толкает кривошипный вал 94 как раз за пределы верхней мертвой точки кривошипного вала 94, при этом пружина 86 высвобождается и принимает на себя приведение в действие кривошипного вала 94 посредством тянущего усилия. Кроме того, кривошипный вал 94 отходит от направляющего штифта 90 и теряет с ним контакт. Толкатель 84 также перемещается посредством высвобождения пружины 86, причем перемещается со скорость большей, чем скорость при движении в противоположном направлении под действием кривошипного вала 94. На фиг. 9C представлено, что если не возникает блокировки толкателя 84, пружина 86 приводит толкатель 84 в требуемое конечное положение, как представлено на чертеже. Таким образом, цикл повторяется вновь, как рассмотрено выше в настоящем документе со ссылкой на фиг. 9A и 9B.
[0048] На фиг. 10 представлено изображение схемы, иллюстрирующей пример работы предполагаемого приводного механизма полусвободно вращающегося кривошипного исполнительного устройства 80, выполненного для преодоления ненормального и нетребуемого состояния толкателя приводного механизма во время работы исполнительного устройства фиг. 9, при этом ненормальное или нетребуемое состояние возникает в ответ на силу, действующую на толкатель против направления пружины, которая может быть различной из-за трения изоляции поршня или сопротивления выходного отверстия носика. Как рассмотрено в настоящем документе со ссылкой на фиг. 9B, когда приводной штифт 90 толкает кривошипный вал 94 как раз за пределы положения верхней мертвой точки кривошипного вала 94, пружина 86 высвобождается и принимает на себя приведение в действие кривошипного вала 94 посредством тянущего усилия. Кроме того, кривошипный вал 94 отходит от приводного штифта 90 и теряет с ним контакт. Толкатель 84 также перемещается посредством высвобождения пружины 86. Если толкатель 84 блокируется до достижения им требуемого конечного положения, то продолжающееся вращение приводного элемента 192 заставляет направляющий штифт 90 зацеплять и приводить в действие кривошипный вал 94 посредством толкающего усилия, которое перемещает толкатель 84 в его требуемое конечное положение. Затем цикл повторяется посредством нового сжатия пружины 86, как рассмотрено выше в настоящем документе со ссылкой на фиг. 9A и 9B. Аналогично, может возникнуть ситуация, когда после высвобождения пружины толкатель перемещается в требуемое конечное положение, но затем отскакивает, попадая в мертвую точку в нетребуемом конечном положении, которое находится дальше требуемого конечного положения, но ближе напряженного положения. В последнем примере продолжающееся вращение приводного элемента 192 заставляет направляющий штифт 90 зацеплять и приводить в действие кривошипный вал 94 посредством толкающего усилия, что перемещает толкатель 84 из нетребуемого конечного положения в напряженное положение.
[0049] На фиг. 10 представлено схематическое покомпонентное изображение кривошипного механизма 88, который содержит направляющий штифт и кривошипную конструкцию полусвободно вращающегося кривошипного исполнительного устройства для устройства для ухода за полостью рта согласно другому варианту осуществления настоящего раскрытия. Вариант осуществления фиг. 10 аналогичен вариантам осуществления, ранее рассмотренным в настоящем документе, со следующими отличиями. Ведущая ось 96 и колено 94 соединены посредством одностороннего соединения. Одностороннее соединение включает в себя штифт 190 и одностороннюю муфту 191 (то есть, однонаправленную муфту), которая использует, например, пружину, плотно намотанную вокруг оси, и имеющую требуемые пружинные характеристики, которые могут требоваться для данного воплощения кривошипного механизма и полусвободно вращающегося кривошипного исполнительного устройства. Штифт 190 неподвижно фиксирован к приводимой в действие круглой ведущей шестерне 92 кривошипного механизма 88. Другими словами, направляющий штифт, приводимый во вращение вокруг приводного вала 96, содержит приводимую в действие ведущую шестерню 92, имеющую основную поверхность, одностороннюю муфту 191, первый конец которой фиксирован к штифту 190, отходящему перпендикулярно от основной поверхности, расположенной на круглой ведущей шестерне на заданном радиальном расстоянии от приводного вала, а второй конец односторонней муфты 191 выполнен с возможностью однонаправленного приводного зацепления с кривошипным валом 94. На фиг. 12 представлено схематическое изображение кривошипного механизма 88 для полусвободно вращающегося кривошипного исполнительного устройства фиг. 11.
[0050] Слово ʺсодержащийʺ и ʺсодержитʺ и подобные не исключает наличия элементов или этапов, отличных от перечисленных в любом пункте формулы или в описании в целом. Ссылка на элемент в единственном числе не исключает множества таких элементов, и наоборот. Один или более вариантов осуществления могут быть воплощены посредством аппаратных средств, содержащих несколько отдельных элементов, и/или посредством надлежаще запрограммированного компьютера. В пункте формулы, относящейся к устройству, в котором перечисляются несколько средств, некоторые из этих средств могут быть включены в один и тот же элемент аппаратных средств. Из того, что некоторые средства и этапы изложены во взаимно различных зависимых пунктах формулы, не следует, что нельзя с выгодой использовать сочетание этих средств и этапов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО С ПОВОРОТНОЙ КРЕПЕЖНОЙ ПАНЕЛЬЮ ДЛЯ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 2019 |
|
RU2796028C2 |
| ДОК-УСТРОЙСТВО (ВАРИАНТЫ) | 2015 |
|
RU2690793C2 |
| Кулачковый механизм с толкателем | 2018 |
|
RU2770373C2 |
| ОТКАЗОУСТОЙЧИВЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И СБОРОЧНЫЙ УЗЕЛ | 2020 |
|
RU2816774C2 |
| ТОРОВО-РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "ТРД-КАН21" (ВАРИАНТЫ) | 2006 |
|
RU2327886C9 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2018 |
|
RU2761389C1 |
| ДВИГАТЕЛЬ С РЕГЕНЕРАЦИЕЙ ТЕПЛА | 2005 |
|
RU2357091C2 |
| УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2014 |
|
RU2638274C2 |
| ПРИВОДНОЙ МЕХАНИЗМ ОБРЕЗНОГО УСТРОЙСТВА ДЛЯ ШВЕЙНОЙ МАШИНЫ | 2005 |
|
RU2302490C2 |
| МОДУЛЬНОЕ УСТРОЙСТВО ОБРАБОТКИ ДОКУМЕНТОВ | 2010 |
|
RU2518956C2 |
Группа изобретений включает полусвободно вращающееся кривошипное исполнительное устройство для устройства для ухода за полостью рта, устройство для ухода за полостью рта и способ предоставления полусвободно вращающегося кривошипного исполнительного устройства, относится к области медицинской техники и может быть использована для ухода за полостью рта. Полусвободно вращающееся кривошипное исполнительное устройство для устройства для ухода за полостью рта содержит камеру, нагружаемый пружинный толкатель, кривошипный механизм и приводной штифт. Камера имеет главную ось, внутреннюю поверхность с упором для сжатия пружины на ее проксимальном конце и выходное отверстие на ее дистальном конце. Нагружаемый пружинный толкатель выполнен с возможностью работы внутри камеры вдоль главной оси между напряженным положением вблизи проксимального конца камеры и высвобожденным положением вблизи дистального конца камеры. Нагружаемый пружинный толкатель содержит толкатель, имеющий дистальный конец, выполненный с возможностью герметичного пересечения внутренней поверхности камеры вдоль главной оси, и пружину, расположенную над проксимальным концом толкателя и расположенную между упором для сжатия пружины и дистальным концом толкателя, имеющую по меньшей мере два сжатых состояния, включающих в себя первое сжатое состояние, большее чем второе сжатое состояние, при этом в ответ на снятие нагрузки с пружины из первого сжатого состояния во второе сжатое состояние пружина приводит в действие толкатель с первой скоростью из напряженного положения в высвобожденное положение, при этом указанное высвобожденное положение содержит конечное положение внутри камеры в ответ на первое состояние исполнительного устройства. Кривошипный механизм соединен с нагружаемым пружинным толкателем для чередования нагружаемого пружинного толкателя между напряженным и высвобожденным положениями. Кривошипный механизм содержит по меньшей мере приводной штифт, приводимый в действие вращательно вокруг приводной оси, и кривошипный вал, выполненный с возможностью полусвободного вращения вокруг приводного вала. Кривошипный вал соединяется с нагружаемым пружинным толкателем и частично приводится в действие вокруг приводной оси посредством (i) приводного штифта в первом режиме работы, который содержит нагружение пружины в первое сжатое состояние в ответ на вытягивание кривошипным валом толкателя из требуемого конечного положения в напряженное положение; (ii) и нагружаемого пружинного толкателя во втором режиме работы, который содержит приведение в действие толкателя из напряженного положения в высвобожденное положение в ответ на высвобождение пружины из первого сжатого состояния во второе сжатое состояние. Изобретения позволяют обеспечить возможности возврата механизма в исходное состояние для повторных действий и не испытывать механические затруднения при слишком быстрой работе. 3 н. и 12 з.п. ф-лы, 12 ил.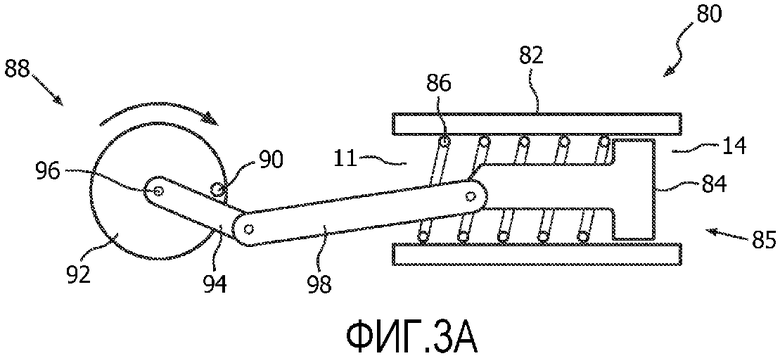
1. Полусвободно вращающееся кривошипное исполнительное устройство (80) для устройства (110) для ухода за полостью рта, содержащее:
камеру (82), имеющую главную ось, внутреннюю поверхность с упором (70) для сжатия пружины на ее проксимальном конце (11) и выходное отверстие на ее дистальном конце (14);
нагружаемый пружинный толкатель (85), выполненный с возможностью работы внутри камеры (82) вдоль главной оси между напряженным положением вблизи проксимального конца (11) камеры (82) и высвобожденным положением вблизи дистального конца (14) камеры (82), при этом нагружаемый пружинный толкатель (85) содержит (i) толкатель (84), имеющий дистальный конец, выполненный с возможностью герметичного пересечения внутренней поверхности камеры (82) вдоль главной оси, и (ii) пружину (86), расположенную над проксимальным концом толкателя (84) и расположенную между упором (70) для сжатия пружины и дистальным концом (14) толкателя (84), имеющую по меньшей мере два сжатых состояния, включающих в себя первое сжатое состояние, большее чем второе сжатое состояние, при этом в ответ на снятие нагрузки с пружины (86) из первого сжатого состояния во второе сжатое состояние пружина (86) приводит в действие толкатель (84) с первой скоростью из напряженного положения в высвобожденное положение, при этом указанное высвобожденное положение содержит конечное положение внутри камеры (82) в ответ на первое состояние исполнительного устройства; и
кривошипный механизм (88), соединенный с нагружаемым пружинным толкателем (85) для чередования нагружаемого пружинного толкателя (85) между напряженным и высвобожденным положениями, при этом кривошипный механизм (88) содержит по меньшей мере приводной штифт (90), приводимый в действие вращательно вокруг приводной оси (96), и кривошипный вал (94), выполненный с возможностью полусвободного вращения вокруг приводного вала, причем кривошипный вал (94) соединяется с нагружаемым пружинным толкателем (85) и частично приводится в действие вокруг приводной оси (96) посредством
(i) приводного штифта (90) в первом режиме работы, который содержит нагружение пружины (86) в первое сжатое состояние в ответ на вытягивание кривошипным валом толкателя (84) из требуемого конечного положения в напряженное положение; и
(ii) нагружаемого пружинного толкателя (85) во втором режиме работы, который содержит приведение в действие толкателя (84) из напряженного положения в высвобожденное положение в ответ на высвобождение пружины (86) из первого сжатого состояния во второе сжатое состояние.
2. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором первый режим работы дополнительно содержит первоначальное расположение толкателя (84) в требуемом конечном положении внутри камеры (82), и зацепление приводного штифта (90) с кривошипным валом (94) для приложения толкающего усилия на кривошипный вал (94), вынуждая кривошипный вал (94), соединенный с нагружаемым пружинным толкателем (85), перемещать нагружаемый пружинный толкатель (85) со второй скоростью из высвобожденного положения в напряженное положение, при этом вторая скорость меньше первой скорости.
3. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 2, в котором вторая скорость содержит скорость, достаточную для поддержания требуемого рабочего цикла для нагружения и высвобождения пружины (86), а также для подачи и последующего выталкивания требуемого количества воздуха и/или жидкости.
4. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором второй режим работы дополнительно содержит первоначальное расположение толкателя (84) в напряженном положении внутри камеры (82) и потерю зацепления приводного штифта (90) с кривошипным валом (94) в ответ на то, что пружина (86) нагружаемого пружинного толкателя (85) (a) приводит в действие толкатель (84) с первой скоростью из напряженного положения в высвобожденное положение и (b) прилагает тянущее усилие к кривошипному валу (94).
5. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором третий режим работы дополнительно содержит первоначальную остановку толкателя (84) в нетребуемом конечном положении внутри камеры (82) перед достижением требуемого конечного положения и зацепление приводного штифта (90) с кривошипным валом (94) для приложения толкающего усилия к кривошипному валу (94), вынуждая кривошипный вал (94), соединенный с нагружаемым пружинным толкателем (85), перемещать нагружаемый пружинный толкатель (85) со второй скоростью из нетребуемого конечного положения в требуемое конечное положение и далее в напряженное положение.
6. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором кривошипный механизм дополнительно содержит соединительный элемент (98), соединяющий кривошипный вал (94) и нагружаемый пружинный толкатель (85).
7. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 6, в котором первый конец соединительного элемента (98) соединен с возможностью вращения с дистальным концом кривошипного вала (94), а второй конец соединительного элемента (98) соединен с возможностью вращения с проксимальным концом толкателя (84).
8. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором приводной штифт (90), приводимый в действие вращательно вокруг приводной оси (96), содержит круглую ведущую шестерню (92), имеющую основную поверхность, при этом приводной штифт (90) дополнительно отходит перпендикулярно от основной поверхности и расположен на круглой ведущей шестерне (92) на заданном радиальном расстоянии от приводной оси (96).
9. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором приводной штифт (90), приводимый в действие вращательно вокруг приводной оси (96), содержит приводной рычажный кривошипный элемент (192), имеющий основную поверхность, при этом приводной штифт (90) дополнительно отходит перпендикулярно от основной поверхности и расположен на приводном рычажном кривошипном элементе (192) на заданном расстоянии от приводной оси (96).
10. Полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором приводной штифт (90), приводимый в действие вращательно вокруг приводной оси (96), содержит приводную круглую ведущую шестерню (92), имеющую основную поверхность, одностороннюю муфту (191), имеющую первый конец, фиксированный к штифту (190), который отходит перпендикулярно от основной поверхности, расположенной на круглой ведущей шестерне (92) на заданном радиальном расстоянии от приводной оси (96), при этом второй конец односторонней муфты (191) выполнен с возможностью однонаправленного приводного зацепления с кривошипным валом (94).
11. Устройство (110) для ухода за полостью рта, содержащее:
полусвободно вращающееся кривошипное исполнительное устройство (80) по п. 1, в котором выходное отверстие на дистальном конце камеры выполнено с возможностью вмещения носика (112), имеющего направляющий кончик (114);
по меньшей мере один резервуар (118) для вмещения жидкости и/или газа;
двигатель (20), выполненный с возможностью приведения в действие приводной оси (96) полусвободно вращающегося кривошипного исполнительного устройства и подачи жидкости и/или газа из указанного по меньшей мере одного резервуара (118) к камере (82); и
контроллер (124) для управления работой двигателя (20).
12. Способ предоставления полусвободно вращающегося кривошипного исполнительного устройства (80) для устройства для ухода за полостью рта, содержащий этапы, на которых:
предоставляют камеру (82), имеющую главную ось, внутреннюю поверхность, имеющую упор (70) для сжатия пружины на ее проксимальном конце (11), и по меньшей мере одно выходное отверстие на ее дистальном конце (14);
управляют нагружаемым пружинным толкателем (85) внутри камеры (82) вдоль главной оси между напряженным положением вблизи проксимального конца (11) камеры (82) и высвобожденным положением вблизи дистального конца (14) камеры (82), при этом нагружаемый пружинный толкатель (85) содержит (i) толкатель (84), имеющий дистальный конец, выполненный с возможностью герметичного пересечения внутренней поверхности камеры (82) вдоль главной оси, и (ii) пружину (86), расположенную над проксимальным концом толкателя (84) и расположенную между упором (70) для сжатия пружины и дистальным концом толкателя (84), имеющую по меньшей мере два сжатых состояния, включающих в себя первое сжатое состояние, большее, чем второе сжатое состояние, при этом в ответ на снятие нагрузки с пружины (86) из первого сжатого состояния во второе сжатое состояние пружина (86) приводит в действие толкатель (84) с первой скоростью из напряженного положения в высвобожденное положение, причем указанное высвобожденное положение содержит (a) требуемое конечное положение внутри камеры (82), соответствующее первому состоянию исполнительного устройства, и (b) нетребуемое конечное положение внутри камеры (82), отличное от требуемого конечного положения, соответствующее второму состоянию исполнительного устройства, отличному от первого состояния исполнительного устройства; и
циклически перемещают, посредством кривошипного механизма (88), нагружаемый пружинный толкатель (85) между напряженным и высвобожденным положениями, при этом кривошипный механизм (88) содержит по меньшей мере приводной штифт (90), приводимый в действие вращательно вокруг приводной оси (96), и кривошипный вал (94), выполненный с возможностью полусвободного вращения вокруг приводной оси (96), при этом кривошипный вал (94) соединяется с нагружаемым пружинным толкателем (85) и частично приводится в действие вокруг приводной оси (96) посредством (i) приводного штифта (90) в первом режиме работы, который содержит нагружение пружины (86) в первое сжатое состояние в ответ на вытягивание толкателя (84) кривошипным валом (94) из требуемого конечного положения в напряженное положение, и (ii) нагружаемого пружинного толкателя (85) во втором режиме работы, который содержит приведение в действие толкателя (84) из напряженного положения в высвобожденное положение в ответ на снятие нагрузки с пружины (86) из первого сжатого состояния во второе сжатое состояние.
13. Способ по п.12, в котором первая скорость содержит скорость, достаточную для развития по меньшей мере минимального требуемого давления внутри камеры (82) для выталкивания требуемого количества воздуха и/или жидкости, и/или смеси воздуха и жидкости.
14. Способ по п. 12, в котором первый режим работы дополнительно содержит первоначальное расположение толкателя (84) в требуемом конечном положении внутри камеры (84), и зацепление приводного штифта (90) с кривошипным валом (94) для приложения толкающего усилия к кривошипному валу (94), что вызывает соединение кривошипного вала (94) с нагружаемым пружинным толкателем (85) для перемещения нагружаемого пружинного толкателя (85) со второй скоростью из высвобожденного положения в напряженное положение, причем вторая скорость меньше первой скорости,
второй режим работы дополнительно содержит первоначальное расположение толкателя (84) в напряженном положении внутри камеры (82) и потерю зацепления приводного штифта (90) с кривошипным валом (94) в ответ на то, что пружина (86) нагружаемого пружинного толкателя (85) (a) приводит в действие толкатель (84) с первой скоростью из напряженного положения в высвобожденное положение и (b) прилагает тянущее усилие к кривошипному валу (94), и
третий режим работы дополнительно содержит первоначальную остановку толкателя (84) в нетребуемом конечном положении внутри камеры (82) перед достижением требуемого конечного положения и зацепление приводного штифта (90) с кривошипным валом (94) для приложения толкающего усилия к кривошипному валу (94), что заставляет кривошипный вал (94), соединенный с нагружаемым пружинным толкателем (85), перемещать нагружаемый пружинный толкатель (85) со второй скоростью из нетребуемого конечного положения в требуемое конечное положение и далее в напряженное положение.
15. Способ по п. 14, в котором вторая скорость содержит скорость, достаточную для поддержания требуемого рабочего цикла для нагрузки и разгрузки пружины (86), а также для подачи и последующего выталкивания требуемого количества воздуха и/или жидкости, и/или смеси воздуха и жидкости.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Ротационный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию, и т.п. работ | 1924 |
|
SU204A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

