Область техники
Изобретение относится к датчикам линейного ускорения (ДЛУ), изготовленным с применением чувствительного элемента резонансного типа. Более конкретно, к датчикам измерения физических величин любого вида путем их преобразования в электрические величины.
Предшествующий уровень техники
Известен датчик, описанный в патенте US 6,922,492 В6 «Емкостной датчик» МПК(7): G01F 23/26, опубликован 31.01.2006 г, авторы Kenneth Burdick, Raymond A. Lia, Robert L. Viventio. Признаки, совпадающие с существенными признаками изобретения, - емкостной датчик содержит сенсор, соединенный с электронной цепью, смонтированный сенсор содержит порт, который соединяет датчик с окружением, электронная цепь содержит цепь автогенератора, которая преобразует емкость емкостного преобразователя в меандр.
Емкостной датчик содержит переменный конденсатор преобразователя, который изменяет свою емкость с изменением в окружающем параметре, сенсор давления, соединенный с электронной цепью. Сенсор давления содержит порт, который соединяет датчик с окружением. Сенсор конструктивно использует переменный конденсатор. Одна пластина переменного конденсатора сформирована при присоединении металлической пластины к диафрагме. Фиксированная пластина поддерживается на удалении, с использованием пространственных элементов, которые зафиксированы или прикреплены. Электронная цепь, содержит трехинверторную цепь автогенератора, которая преобразует емкость емкостного преобразователя в меандр. Частота меандра измеряется микропроцессором.
Недостатком данного датчика является то, что его схема оптимальна только для используемого типа чувствительного элемента датчиков резистивного и емкостного типов.
Известен датчик, описанный в патенте US 5,722,290 «Емкостной датчик уровня жидкости с замкнутым полем» приоритет 21.03.1995 г, опубликован 3.03.1998; МПК(7): G01F 23/26, автор James W. Kronberg. Признаки, совпадающие с существенными признаками изобретения - датчик основан на цепи закрытого поля, охватывающего кольцо генератора, в котором выходным сигналом датчика является импульсная последовательность переменной частоты.
Датчик уровня жидкости основан на цепи закрытого поля, охватывающего кольцо генератора, использующего симметричную решетку блоков пластин, которая создает ток смещения, который изменяется как функция близости жидкости к блокам пластин. В приборе используют блоки пластин, расположенные симметрично и соединенные как емкостные элементы в кольце генератора, состоящего из КМОП инверторов. Выходным сигналом датчика является импульсная последовательность переменной частоты, обратно-пропорциональной емкости между пластинами.
Недостатком данного емкостного датчика является то, что его схема оптимальна только для используемого типа чувствительного элемента в виде распределенной емкости и фактически интегрирована в конструкцию датчика, что будет осложнять настройку параметров сигнала при его изготовлении.
В качестве прототипа был выбран патент US 7528597 В2 «Индукционный датчик» МПК(7): G01B 7/14, G01B 7/30, Н03В 1/00, Н03В 5/00, приоритет 07.03.2005 г, опубликован 05.05.209, авторы G. Brand Taylor, Steven E. Beard.
Признаки, совпадающие с существенными признаками изобретения - датчик служит для измерения ускорения, содержит автогенератор, реактивный блок, объединенный с автогенератором и выходной усилитель; изменение частоты колебаний при изменениях в реактивном сопротивлении используются как выходной сигнал; датчик содержит автогенератор с частотозадающим элементом в цепи обратной связи; выходной сигнал датчика формируется усилительным буфером.
Датчик содержит автогенератор, реактивный блок, объединенный с автогенератором и выходной усилитель. Реактивный блок состоит из катушки индуктивности с изменяемым реактивным сопротивлением (индуктора) и, соединенного последовательно, конденсатора. У катушки имеется привод, относительное движение которого вызывает изменение реактивного сопротивления индуктора, которое вызывает изменение выходного сигнала усилителя. Генерируемый ток питает индуктор, напряжение проходит через индуктор и если напряжение изменяется, то эти изменения могут быть измерены. Изменение частоты или амплитуды колебаний, при изменениях в реактивном сопротивлении индуктора, используются как выходной сигнал. Автогенератор, содержащий реактивный блок, построен на одном инверторе. В качестве инвертора могут быть использованы быстродействующий КМОП-инвертор, транзисторный усилитель или операционный усилитель. Выходной усилитель также может быть выполнен в виде инвертора.
Недостатком индукционного датчика является то, что схема автогенератора оптимальна только для данного типа чувствительного элемента и не учитывает особенностей характеристик индуктора, влияющих на погрешность преобразования. Схема автогенератора не может быть использована, так как не обеспечивает предъявляемых требований к ДЛУ.
Раскрытие изобретения
Задачей, на решение которой направлено заявляемое изобретение, является создание датчика линейного ускорения (ДЛУ) повышенной точности и устойчивости к неблагоприятным факторам, работающего с разными типами чувствительных элементов резонансного типа.
Технический результат, достигаемый при решении этой задачи, заключается в повышении точности преобразования линейного ускорения, снижении погрешности при преобразовании измеряемого физического параметра в частоту сигнала с использованием резонансного частотного датчика линейного ускорения, повышении функциональных возможностей устройства.
Технический результат достигается тем, что в датчике линейного ускорения, содержащем автогенератор с частотозадающим элементом в цепи обратной связи, выходной сигнал которого формируется усилительным буфером, согласно изобретению, датчик снабжен энергонезависимым запоминающим устройством, тремя буферами, а автогенератор датчика снабжен предварительным усилителем, полосовым фильтром и схемой стабилизации амплитуды сигнала возбуждения чувствительного элемента. При этом чувствительный элемент выполнен в виде резонансного частотного датчика линейного ускорения. Энергонезависимое запоминающее устройство выполнено на блоке регистров с предварительной установкой на монтажных перемычках, с возможностью хранения в них индивидуальных паспортных параметров, характеризующих передаточную характеристику датчика.
Совокупность существенных признаков обеспечивает получение технического результата - повышение точности измерения линейного ускорения, снижение аддитивной и мультипликативной составляющих погрешности при преобразовании измеряемого физического параметра в частоту сигнала с использованием резонансного частотного датчика линейного ускорения, повышение функциональных возможностей устройства.
Первый буфер выполнен с возможностью формирования сигнала возбуждения резонансного частотного датчика. Второй буфер выполнен с возможностью формирования выходного частотного сигнала. Третий буфер выполнен с возможностью формирования выходной кодовой последовательности паспортных параметров.
Краткое описание фигур чертежа
Изобретение поясняется следующими чертежами:
на фиг. 1 представлена структурная схема устройства;
на фиг. 2 представлена функциональная схема устройства;
на фиг. 3 представлена функциональная схема устройства при реализации электрической схемы на базе аналого-цифрового базового матричного кристалла (АЦ БМК);
на фиг. 4 представлена принципиальная схема устройства при реализации электрической схемы на базе АЦ БМК.
Варианты осуществления изобретения
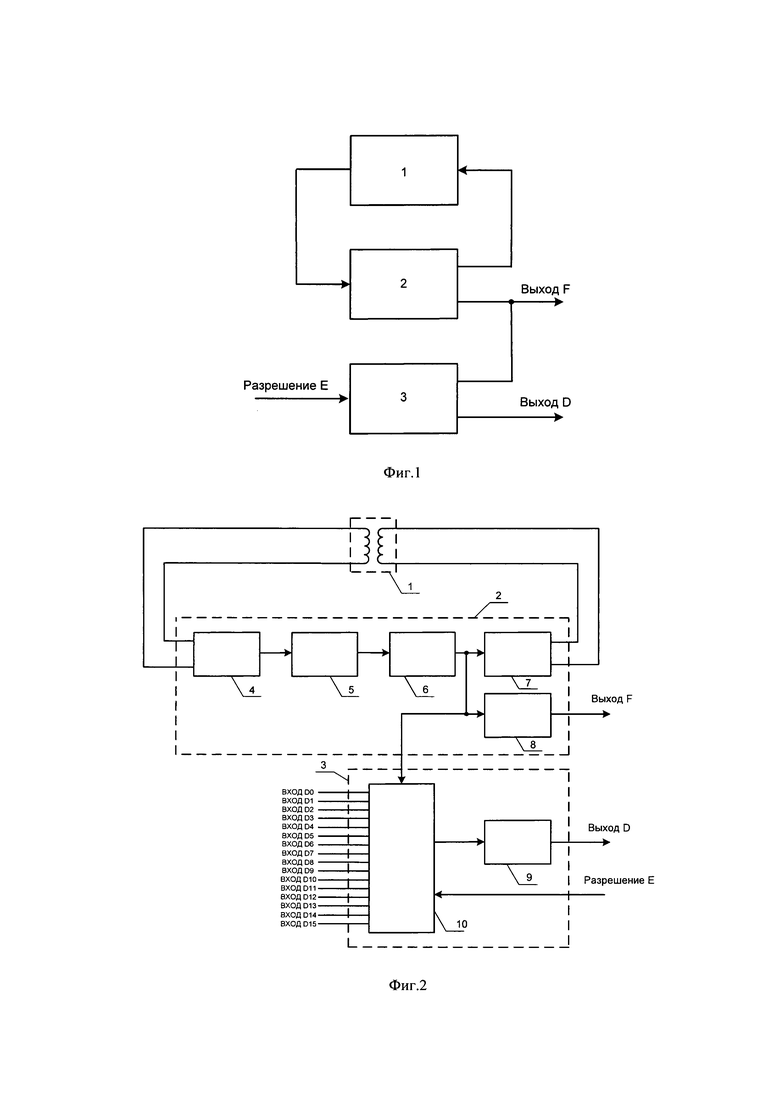
Структурная схема ДЛУ (фиг. 1) содержит три основных блока: резонансный частотный датчик линейного ускорения 1, схему возбуждения 2 и ПЗУ в виде блока регистров 3.
Резонансный частотный датчик линейного ускорения 1 в рассматриваемом варианте представлен в виде струнного однокомпонентного виброчастотного датчика линейного ускорения. Резонансный частотный датчик линейного ускорения 1 обеспечивает преобразование линейного ускорения в частотный сигнал и определяет передаточную характеристику ДЛУ.
Схема возбуждения 2 обеспечивает возбуждение резонансного частотного датчика линейного ускорения 1 и формирует частотный сигнал на выход «F». Схема возбуждения 2 обеспечивает работу резонансного частотного датчика, при которой частота выходного сигнала равна его собственной резонансной частоте и пропорциональна действующему линейному ускорению, при этом обеспечивается минимальная временная нестабильность частоты выходного сигнала. Для удобства обработки выходного сигнала ДЛУ цифровыми устройствами, выходной сигнал формируется в виде периодической последовательности прямоугольных импульсов.
Передаточная характеристика однокомпонентного виброчастотного датчика нелинейная. С целью обеспечения требуемой точности преобразования в ДЛУ учитывается нелинейность характеристики виброчастотного датчика. Это осуществляется путем описания характеристики полиномом второго порядка (a=К1⋅Δƒ+К2⋅Δƒ2). Коэффициенты полинома (К1 и К2) определяются для каждого датчика при изготовлении, паспортизируются и записываются в ПЗУ датчика. ПЗУ (в виде шестнадцатиразрядного регистра с предварительной установкой монтажными перемычками) обеспечивает хранение значений паспортных параметров чувствительного элемента, в том числе при отсутствии питающего напряжения. При запросе внешней системы по сигналу разрешения «Е» ДЛУ выдает значения коэффициентов на выход «D» в виде последовательного двоичного шестнадцатиразрядного кода на собственной частоте датчика. Действующее линейное ускорение определяется внешней системой путем алгоритмической обработки частотного сигнала «F» с использованием коэффициентов К1 и К2.
Блок регистров 3 обеспечивает хранение паспортных параметров передаточной характеристики ДЛУ и выдачу паспортных параметров в виде двоичного кода на выход «D» при наличии сигнала разрешения «Е».
ДЛУ обеспечивает формирование частотного сигнала «F» с частотой, пропорциональной значению линейного ускорения с погрешностью преобразования не превышающей 0,1% в условиях повышенных механических и климатических факторов, при этом в качестве частотозадающего чувствительного элемента используется струнный однокомпонентный виброчастотный датчик линейного ускорения, изготовленный по относительно простой технологии и с более низкой стоимостью и с более высокой эксплуатационной надежностью по сравнению с двухкомпонентными аналогами. Особенностью однокомпонентного виброчастотного датчика, является нелинейность его передаточной характеристики, которую необходимо учитывать для обеспечения требуемой точности преобразования.
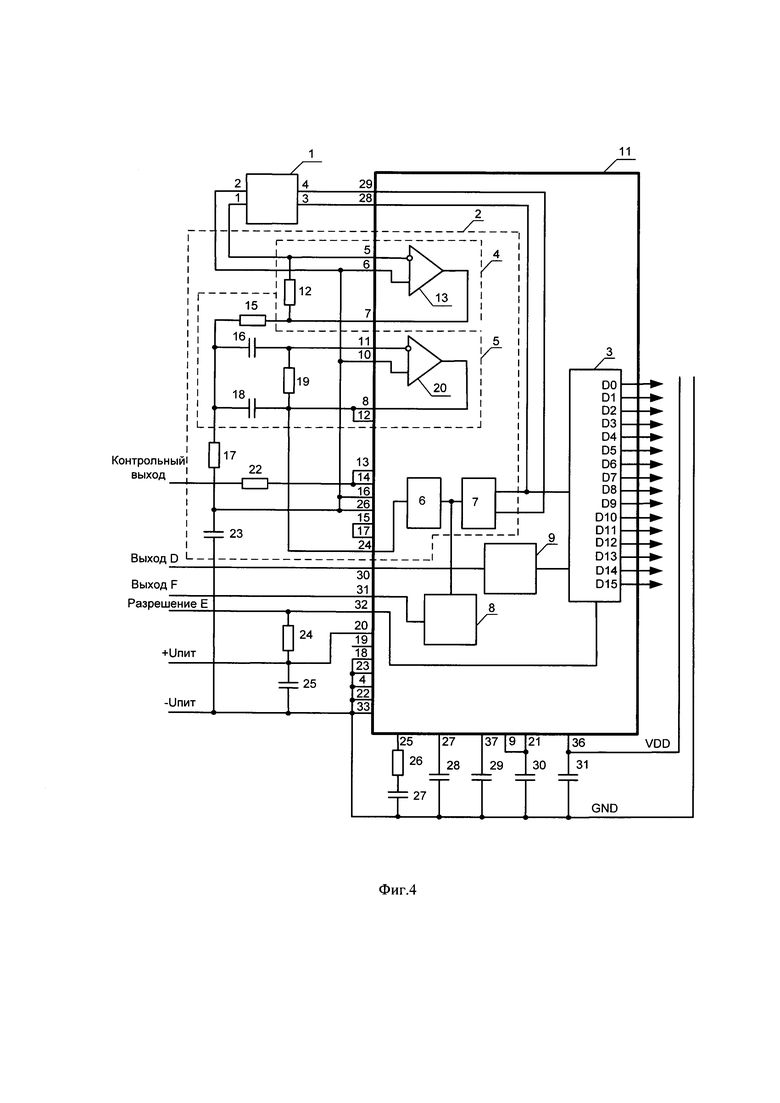
На фиг. 2 представлена функциональная схема заявляемого устройства. Схема содержит резонансный частотный датчик линейного ускорения 1, схему возбуждения 2, блок регистров 3.
В схему возбуждения 2 входят предварительный усилитель 4, полосовой фильтр 5, усилитель-стабилизатор 6, первый буфер 7, обеспечивающий формирование аналогового сигнала возбуждения, второй буфер 8, обеспечивающий формирование выходного частотного сигнала.
Блок регистров 3 содержит 16-разрядный сдвиговый регистр 10 с параллельной загрузкой, третий буфер 9, обеспечивающий передачу двоичного шестнадцатиразрядного кода.
Выдача информации из регистра 10 осуществляется на собственной частоте резонансного частотного датчика линейного ускорения 1 при наличии сигнала разрешения «Е». Информация на входах 16-разрядного сдвигового регистра 10 задается внешними перемычками.
Схема ДЛУ работает следующим образом.
Резонансный частотный датчик линейного ускорения 1 совместно со схемой возбуждения 2 образуют автогенератор, работающий на частоте собственного резонанса резонансного частотного датчика линейного ускорения 1. Частота автогенерации пропорциональна действующей измеряемой физической величине, в данном случае линейному ускорению. Резонансный частотный датчик линейного ускорения 1 обеспечивает преобразование линейного ускорения в частотный сигнал и определяет передаточную характеристику ДЛУ. Схема возбуждения 2 обеспечивает режим работы резонансного частотного датчика линейного ускорения 1 с высокой стабильностью частоты автогенерации, чем обеспечивается пониженная погрешность преобразования ускорения в частоту.
Выход резонансного частотного датчика линейного ускорения 1 соединен со входом предварительного усилителя 4. Предварительный усилитель 4 осуществляет первичное усиление выходного сигнала резонансного частотного датчика линейного ускорения 1 и согласование выходной цепи резонансного частотного датчика линейного ускорения 1 со схемой возбуждения 2.
Выход предварительного усилителя 4 соединен со входом полосового фильтра 5. Полосовой фильтр 5 служит для исключения возможности возбуждения автогенератора на частотах, отличающихся от частоты основного резонанса резонансного частотного датчика линейного ускорения 1. Наличие полосового фильтра 5 повышает стабильность частоты автогенерации. Чтобы фазовая характеристика фильтра 5 не сильно искажала фазовую характеристику автогенератора, добротность фильтра 5 выбирают значительно ниже добротности резонансного частотного датчика линейного ускорения 1.
Выход полосового фильтра 5 соединен со входом усилителя-стабилизатора 6. Усилитель-стабилизатор 6 обеспечивает необходимый петлевой коэффициент усиления схемы возбуждения 2 для возникновения генерации в автогенераторе, и стабилизацию амплитуды напряжения сигнала возбуждения, с целью повышения стабильности частоты авто генерации.
Выход усилителя-стабилизатора 6 соединен со входом первого буфера 7 и одновременно соединен со входом второго буфера 8. Первый буфер 7 обеспечивает согласование выхода схемы возбуждения 2 с входной цепью резонансного частотного датчика линейного ускорения 1, что обеспечивает, за счет повышения помехозащищенности автогенератора, решение задачи повышения функциональных возможностей ДЛУ.
Наличие в схеме возбуждения 2 предварительного усилителя 4, полосового фильтра 5, усилителя-стабилизатора 6, первого буфера 7 в совокупности обеспечивает повышенную стабильность частоты в автогенераторе, что обеспечивает решение задачи повышения точности преобразования линейного ускорения, снижения погрешности.
Второй буфер 8 обеспечивает нормирование выходного сигнала по амплитуде и фронтам, и обеспечивает согласование выхода схемы с внешними устройствами. Это обеспечивает решение задачи повышения функциональных возможностей ДЛУ. Нормирование заключается в обеспечении значения амплитуды и фронтов выходного частотного сигнала, необходимых для внешних устройств.
Сигнал с выхода усилителя-стабилизатора 6 также поступает в качестве тактового сигнала на сдвиговый регистр 10 блока регистров 3. При поступлении на сдвиговый регистр 10 сигнала разрешения передачи данных «Е» сдвиговый регистр 10 осуществляет последовательную выдачу данных со входов предварительной установки D0-D15 через третий буфер 9 на выход «D» в виде последовательного шестнадцатиразрядного кода на собственной частоте резонансного частотного датчика линейного ускорения 1. Значения данных D0-D15 определяются индивидуально для каждого ДЛУ при изготовлении и фиксируются путем подключения соответствующих входов к плюсу или минусу питающего напряжения монтажными перемычками. Значения данных D0-D15 являются индивидуальными паспортными параметрами для каждого ДЛУ. Наличие и возможность передачи в процессе работы внешней системе индивидуальных паспортных параметров ДЛУ, характеризующих передаточную характеристику данного ДЛУ, обеспечивает получение технического результата - повышение точности преобразования линейного ускорения и снижение погрешности преобразования, что позволяет решить задачу создания ДЛУ повышенной точности.
В предлагаемом решении в качестве частотозадающего чувствительного элемента используется виброчастотный датчик, а автогенератор датчика содержит три усилительных каскада: предварительный усилитель, полосовой фильтр и схему стабилизации амплитуды сигнала возбуждения чувствительного элемента, которые в совокупности обеспечивают повышенную стабильность частоты преобразования и пониженную погрешность преобразования.
Датчик также содержит энергонезависимое запоминающее устройство (выполненное на блоке регистров с предварительной установкой на монтажных перемычках), в котором хранятся индивидуальные паспортные параметры, характеризующие передаточную характеристику датчика. При запросе внешней системы по сигналу разрешения датчик выдает значения коэффициентов на отдельный выход в виде последовательного двоичного шестнадцатиразрядного кода на собственной частоте датчика. С использованием значений коэффициентов и частоты выходного сигнала внешняя система определяет значение ускорения.
Наличие в ДЛУ энергонезависимого запоминающего устройства и использование индивидуальных паспортных параметров, характеризующих передаточную характеристику датчика, и, выдаваемых в виде последовательного двоичного кода с собственной частотой датчика по сигналу разрешения, обеспечивает повышенную точность преобразования линейного ускорения.
В схеме датчика предусмотрено три буфера - один служит для формирования сигнала возбуждения чувствительного элемента; второй - для формирования выходного частотного сигнала; третий - для формирования выходной кодовой последовательности паспортных параметров. Наличие в ДЛУ согласующих буферов обеспечивает повышенние функциональных возможностей ДЛУ. Все это позволяет выполнять поставленные задачи, на решение которых направлено заявляемое изобретение.
На фиг. 3 представлена функциональная схема ДЛУ при реализации электрической схемы на базе аналого-цифрового базового матричного кристалла (АЦ БМК) 11. Реализация схемы на базе АЦ БМК по сравнению с реализацией на дискретных элементах дает следующие преимущества:
- малый разброс параметров аналоговых компонентов схемы благодаря изготовлению компонентов БМК в едином технологическом цикле;
- низкие массогабаритные характеристики;
- низкое энергопотребление;
- повышенная надежность и устойчивость к внешним воздействиям, таким как температурные и механические воздействия;
- низкая стоимость;
- технологичность изготовления.
Такие преимущества как низкие массогабаритные характеристики, низкое энергопотребление, повышенная надежность и устойчивость к внешним воздействиям обеспечивают решение задачи повышения функциональных возможностей ДЛУ.
ДЛУ содержит основные блоки:
- резонансный частотный датчик линейного ускорения 1;
- схема возбуждения 2,
- блок регистров 3,
- АЦ БМК 11,
- источник опорного напряжения 14.
Схема возбуждения 2, реализована на АЦ БМК 11, совместно с дополнительными внешними элементами - резисторами 12, 15, 17, 19, и конденсаторами 16, 18. Схема возбуждения 2 построена таким образом, что не требует подстройки параметров. Это позволяет повысить функциональные возможности устройства.
АЦ БМК 11 содержит следующие основные функциональные элементы: первый операционный усилитель (ОУ) 13; второй ОУ 20, усилитель-стабилизатор 6; первый буфер 7; второй буфер 8; третий буфер 9, сдвиговый регистр 22; источник опорных напряжений 14 (ИОН).
ДЛУ содержит дополнительные элементы: первый резистор 12; второй резистор 15; третий резистор 17; четвертый резистор 19; первый конденсатор 16; второй конденсатор 18.
Как показано на фиг. 3, на ОУ 13 и резисторе 12 выполнен предварительный усилитель 4. Полосовой фильтр 5 выполнен на ОУ 20, резисторах 15, 17, 19 и конденсаторах 16 и 18. Блок регистров 3 выполнен на сдвиговом регистре 21 и третьем буфере 9. Усилитель-стабилизатор 6 построен по типу усилителя-ограничителя и обеспечивает коэффициент усиления схемы возбуждения, необходимый для возникновения автогенерации. Выход усилителя-стабилизатора подключен ко входу первого буфера 7, ко входу второго буфера 8 и к тактовому входу регистра 21. Выход 2 первого буфера 7 имеет потенциал средней точки «UCP» и подключен к входу 2 резонансного частотного датчика линейного ускорения 1.
Источник опорных напряжений 14 (фиг. 3) формирует ряд стабилизированных напряжений для питания аналоговых и цифровых блоков АЦ БМК 11.
При этом выход 3 резонансного частотного датчика линейного ускорения 1 подключен к инвертирующему входу ОУ 13 и одновременно подключен к первому выводу резистора 12. Выход 4 резонансного частотного датчика линейного ускорения 1 подключен к неинвертирующему входу ОУ 13 и одновременно подключен к выходу UCP (средняя точка) ИОН 14, ко второму выводу резистора 17, к неинвертирующему входу ОУ 20. Выход ОУ 13 подключен ко второму выводу резистора 12 и одновременно подключен к первому выводу резистора 15. Второй вывод резистора 15 подключен к первому выводу резистора 17 и одновременно подключен к первому выводу конденсатора 16 и к первому выводу конденсатора 18. Второй вывод конденсатора 18 подключен к инвертирующему входу ОУ 20 и одновременно подключен к первому выводу резистора 19. Второй вывод резистора 19 подключен ко второму выводу конденсатора 16 и одновременно подключен к выходу ОУ 20. Выход ОУ 20 подключен ко входу усилителя-стабилизатора 6. Выход усилителя-стабилизатора 6 подключен ко входу первого буфера 7 и одновременно подключен к входу буфера 8 и к тактовому входу С сдвигового регистра 21. Выход 1 первого буфера 7 подключен к входу 1 резонансного частотного датчика линейного ускорения 1. Выход сдвигового регистра 21 подключен ко входу буфера 9.
Выход буфера 8 является выходом ДЛУ с частотным сигналом «F». Выход буфера 9 является выходом ДЛУ с выходным сигналом D в виде двоичного шестнадцатиразрядного кода.
На фиг. 4 приведена принципиальная электрическая схема ДЛУ при реализации электрической схемы на базе АЦ БМК.
Резонансный частотный датчик линейного ускорения 1 подключен к АЦ БМК 11, при этом вывод 1 резонансного частотного датчика линейного ускорения 1, подключен к выводу 5 АЦ БМК 11 и одновременно подключен к первому выводу резистора 12. Вывод 2 резонансного частотного датчика линейного ускорения 1, подключен к выводам 6, 10, 16, 26 АЦ БМК 11 и одновременно подключен ко второму выводу резистора 17 и к первому выводу конденсатора 23. Вывод 3 резонансного частотного датчика линейного ускорения 1, подключен к выводу 28 АЦ БМК 11. Вывод 4 резонансного частотного датчика линейного ускорения 1, подключен к выводу 29 АЦ БМК 11. Второй вывод резистора 12 подключен к выводу 7 АЦ БМК 11 и одновременно подключен к первому выводу резистора 15. Второй вывод резистора 15 подключен к первому выводу резистора 17 и одновременно подключен к первому выводу конденсатора 16 и к первому выводу конденсатора 18. Второй вывод конденсатора 16 подключен к выводу 11 АЦ БМК 11 и одновременно подключен к первому выводу резистора 19. Второй вывод резистора 19 подключен ко второму выводу конденсатора 18 и одновременно подключен к выводам 8, 12, 24 АЦ БМК 11. Первый вывод резистора 22 подключен к выводам 13, 14 АЦ БМК 11. Второй вывод резистора 22 является контрольным выходом ДЛУ. Второй вывод конденсатора 23 подключен ко второму выводу конденсатора 25 и одновременно подключен к выводам 18, 23, 4, 22, 33 АЦ БМК 11. Первый вывод конденсатора 25 подключен ко второму выводу резистора 24 и одновременно подключен к выводу 20 АЦ БМК 11. Первый вывод резистора 26 подключен к выводу 25 АЦ БМК. Второй вывод резистора 27 подключен к первому выводу конденсатора 27. Второй вывод конденсатора 27 подключен ко второму выводу конденсатора 28 и одновременно подключен ко второму выводу конденсатора 29, ко второму выводу конденсатора 30, ко второму выводу конденсатора 31 и одновременно подключен к выводам 18, 23, 4, 22, 33 АЦ БМК 11. Первый вывод конденсатора 28 подключен к выводу 27 АЦ БМК 11. Первый вывод конденсатора 29 подключен к выводу 37 АЦ БМК 11. Первый вывод конденсатора 30 подключен к выводам 9 и 21 АЦ БМК 11. Первый вывод конденсатора 31 подключен к выводу 36 АЦ БМК 11. Вывод 31 АЦ БМК является выходом «F» ДЛУ. Вывод 30 АЦ БМК 11 является выходом «D» ДЛУ. Вывод 32 АЦ БМК 11 является входом разрешения «Е» ДЛУ. Выводы 20 и 4 являются входами питающего напряжения для ДЛУ.
Схема работает следующим образом.
Как показано на фиг. 3 и 4 при подаче на устройство напряжения питания UПИТ, которое лежит в допустимом диапазоне, источник опорного напряжения 14 начинает формировать стабилизированное напряжение питания внутренних блоков АЦ БМК 11 UVCC и стабилизированное напряжение средней точки UCP, необходимое для работы схемы возбуждения 2 и блока регистров 3. При установившемся напряжении UVCC сигнал с выходов 3 и 4 резонансного частотного датчика линейного ускорения 1 поступает на вход предварительного усилителя, выполненного на ОУ 13 и резисторе 12. С целью обеспечения в схеме возбуждения более высокого отношения сигнал-шум предварительный усилитель выполнен в виде преобразователя ток-напряжения на ОУ 13. Это обеспечивает снижение погрешности при преобразовании измеряемого физического параметра в частоту сигнала.
Сигнал с выхода операционного усилителя ОУ 13 поступает на активный полосовой фильтр, выполненный на ОУ 20, резисторах 15, 17, 19 и конденсаторах 16 и 18. Фильтр выполнен по классической схеме активного полосового фильтра на ОУ с многопетлевой обратной связью. Достоинством данного фильтра является несклонность к самовозбуждению на резонансной частоте фильтра. Это исключает возможность самовозбуждения на частотах, отличающихся от резонансной частоты резонансного частотного датчика линейного ускорения 1, и повышает точность преобразования линейного ускорения.
Коэффициенты усиления предварительного усилителя 4 и полосового фильтра 5 (фиг. 2) выбираются такими, чтобы сигнал на выходе фильтра 5 не выходил за диапазон напряжения UVCC.
Как показано на фиг. 3, с выхода ОУ 20 сигнал поступает на вход усилителя-стабилизатора 6. На выходе усилителя-стабилизатора 6 сигнал имеет форму меандра со стабильной амплитудой. С выхода усилителя-стабилизатора 6 сигнал поступает на вход первого буфера 7, вход второго буфера 8 и тактовый вход «С» сдвигового регистра 21. Второй буфер 8 формирует выходной частотный сигнал «F». При поступлении на вход «Е» сдвигового регистра 21 сигнала разрешения на выходе сдвигового регистра 21 формируется последовательность импульсов и пауз, соответствующая коду, установленному на входах предварительной установки D0-D15 сдвигового регистра 21 путем их подключения к выходам источника опорного напряжения 14 «UVCC» или «GND». Сигнал с выхода сдвигового регистра 21 поступает на вход третьего буфера 9, на выходе которого формируется последовательный кодовый сигнал D.
При изменении воздействующей измеряемой физической величины (ускорения) изменяется частота выходного сигнала «F».
Как показано на фиг. 2, условие баланса амплитуд автогенератора обеспечивается выбранными коэффициентами усиления предварительного усилителя 4, полосового фильтра 5 и усилителя-стабилизатора 6, с учетом понижающего коэффициента передачи резонансного частотного датчика линейного ускорения 1. Условие баланса фаз автогенератора обеспечивается фиксированными фазовыми сдвигами предварительного усилителя 4, полосового фильтра 5, фазовым сдвигом резонансного частотного датчика линейного ускорения 1 на резонансной частоте и усилителя-стабилизатора 6, таким образом, что частота автогенерации определяется собственной резонансной резонансного частотного датчика линейного ускорения 1, которая может изменяться в определенном диапазоне при изменении ускорения, воздействующего на датчик линейного ускорения 1.
При сравнении предлагаемого технического решения с прототипом отмечены следующие отличия и преимущества: повышение стабильности частоты в автогенераторе и повышение точности преобразования физического параметра; обеспечение пониженной погрешности преобразования ускорения при повышенных функциональных возможностях. Это позволяет решить задачу создания датчика линейного ускорения (ДЛУ) повышенной точности и устойчивости к неблагоприятным факторам, работающего с разными типами чувствительных элементов резонансного типа.
Промышленная применимость
Рассмотренный вариант выполнения изобретения может быть реализован на существующей в настоящее время дискретной элементной базе. Это доказывает его работоспособность и подтверждает промышленную применимость.
Наиболее эффективно выглядит использование предложенного ДЛУ в приборах автоматики, авиационной, космической и ракетостроительной промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХЕМА ВОЗБУЖДЕНИЯ ЧАСТОТНОГО ДАТЧИКА | 2019 |
|
RU2724795C1 |
| СХЕМА АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ | 2018 |
|
RU2684510C1 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2001 |
|
RU2213934C2 |
| Пьезополупроводниковый стабилизатор постоянного напряжения | 1981 |
|
SU983689A1 |
| Измерительное устройство для частотного пьезорезонансного датчика | 1981 |
|
SU970265A1 |
| МНОГОКАНАЛЬНЫЙ КВАРЦЕВЫЙ ГЕНЕРАТОР | 2016 |
|
RU2628234C1 |
| ГЕНЕРАТОР | 2010 |
|
RU2429556C1 |
| ГЕНЕРАТОР | 2011 |
|
RU2453983C1 |
| Пьезополупроводниковый стабилизатор напряжения | 1984 |
|
SU1241369A1 |
| Регулятор частоты для электро-МАшиННыХ пРЕОбРАзОВАТЕлЕй | 1979 |
|
SU853763A1 |

Изобретение относится к области электротехники. Технический результат – повышение точности преобразования линейного ускорения, снижение погрешности при преобразовании измеряемого физического параметра в частоту сигнала с использованием резонансного частотного датчика линейного ускорения и повышение функциональных возможностей устройства. Для этого, в частности, датчик линейного ускорения (ДЛУ) содержит автогенератор с частотозадающим элементом в цепи обратной связи, выходной сигнал которого формируется усилительным буфером. ДЛУ снабжен энергонезависимым запоминающим устройством, тремя буферами. Автогенератор датчика снабжен предварительным усилителем, полосовым фильтром и усилителем-стабилизатором амплитуды сигнала возбуждения чувствительного элемента. Частотозадающий элемент выполнен в виде резонансного частотного датчика линейного ускорения. Энергонезависимое запоминающее устройство выполнено на блоке регистров с предварительной установкой на монтажных перемычках и хранит в них индивидуальные паспортные параметры, характеризующие передаточную характеристику датчика. Первый буфер формирует сигнал возбуждения чувствительного элемента. Второй буфер формирует выходной частотный сигнал. Третий буфер формирует выходной сигнал кодовой последовательности паспортных параметров. 3 з.п. ф-лы, 4 ил.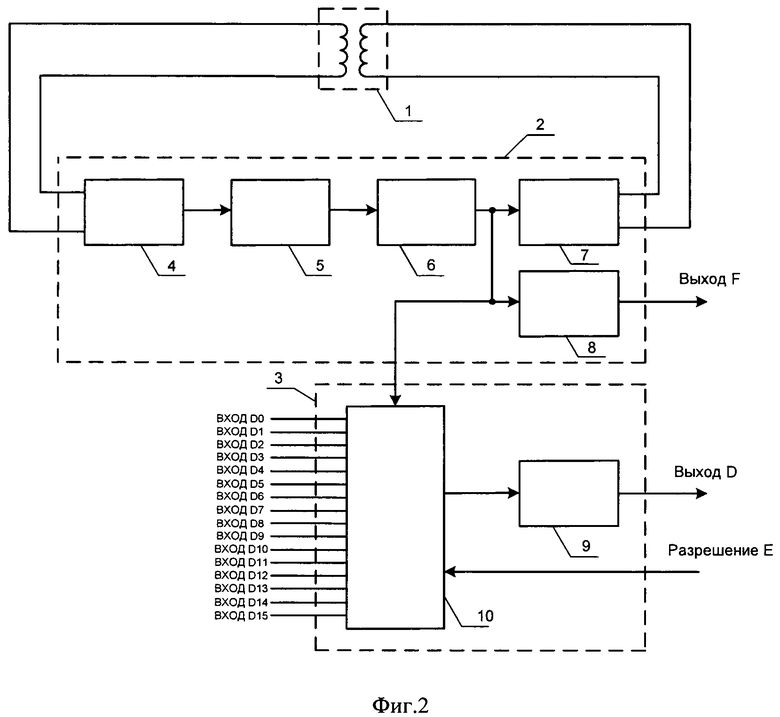
1. Датчик линейного ускорения, содержащий схему возбуждения с частотозадающим чувствительным элементом в цепи обратной связи, выходной сигнал которого формируется усилительным буфером, отличающийся тем, что датчик снабжен энергонезависимым запоминающим устройством, а схема возбуждения снабжена предварительным усилителем, полосовым фильтром, усилителем-стабилизатором амплитуды сигнала возбуждения частотозадающего чувствительного элемента, первым буфером и вторым буфером, при этом частотозадающий чувствительный элемент выполнен в виде резонансного частотного датчика линейного ускорения с нелинейной передаточной характеристикой и образует со схемой возбуждения автогенератор, работающий на частоте собственного резонанса резонансного частотного датчика линейного ускорения, а энергонезависимое запоминающее устройство выполнено на блоке регистров с возможностью хранения в них индивидуальных паспортных параметров, характеризующих передаточную характеристику датчика, и содержит 16-разрядный сдвиговый регистр с параллельной загрузкой и третий буфер, при этом указанные предварительный усилитель, полосовой фильтр, усилитель-стабилизатор амплитуды сигнала возбуждения частотозадающего чувствительного элемента и первый буфер являются последовательно соединенными между собой, где вход и выход резонансного частотного датчика линейного ускорения, соединены, соответственно, с выходом первого буфера и входом предварительного усилителя, кроме того, выход усилителя-стабилизатора амплитуды сигнала возбуждения частотозадающего чувствительного элемента также соединен со входами второго буфера и 16-разрядного сдвигового регистра с параллельной загрузкой, где выход второго буфера является выходом схемы возбуждения и обеспечивает нормирование выходного сигнала по амплитуде и фронтам, другой вход 16-разрядного сдвигового регистра с параллельной загрузкой является входом блока регистров, а выход 16-разрядного сдвигового регистра с параллельной загрузкой соединен со входом третьего буфера, выход которого является выходом блока регистров.
2. Датчик линейного ускорения по п. 1, отличающийся тем, что первый буфер выполнен с возможностью формирования сигнала возбуждения чувствительного элемента.
3. Датчик линейного ускорения по п. 1, отличающийся тем, что второй буфер выполнен с возможностью формирования выходного частотного сигнала.
4. Датчик линейного ускорения по п. 1, отличающийся тем, что третий буфер выполнен с возможностью формирования выходной кодовой последовательности паспортных параметров.
| Датчик линейных ускорений | 1982 |
|
SU1130805A1 |
| CN 105891544 B, 09.11.2018 | |||
| Устройство для определения боковой чувствительности датчиков вибрационных и линейных ускорений | 1985 |
|
SU1290187A1 |
| US 5456109 A1, 10.10.1995 | |||
| CN 105891544 B, 09.11.2018. | |||

