ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к переносному устройству дозирования, к резервуару, содержащему ингредиент, подлежащий дозированию таким устройством, к системе дозирования, содержащей такое устройство и такой резервуар, и к способу дозирования.
В частности, настоящее изобретение относится к области дозирования большого количества порошковых ингредиентов.
УРОВЕНЬ ТЕХНИКИ
В настоящее время существуют два способа дозирования порошковых ингредиентов: ручной способ, включающий ручное дозирование порошковых ингредиентов на весах с визуальной индикацией, и другой способ, включающий обеспечение множества бункеров, каждый из которых снабжен элементами доставки, и выполняемый автоматическим образом.
Ручной способ является менее дорогим, но требует значительных усилий со стороны оператора, сопряжен с риском ошибок и плохого сквозного контроля.
Второй способ является очень дорогим, но может быть использован для дозирования ряда ингредиентов с обеспечением хорошей возможности сквозного контроля.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в устранении всех или некоторых из вышеуказанных недостатков.
Соответственно, согласно первому аспекту, задача настоящего изобретения заключается в обеспечении переносного устройства для дозирования по меньшей мере одного ингредиента, которому назначено заданное значение массы, причем устройство содержит:
- средства направления в положение напротив по меньшей мере одного резервуара, содержащего подлежащий дозированию ингредиент,
средства считывания идентификатора ингредиента на резервуаре, содержащем указанный ингредиент,
оснащенные механическим приводом средства доставки подлежащего дозированию ингредиента из резервуара,
- средства получения результата измерения массы ингредиента,
- средства управления, выполненные с возможностью приведения в действие оснащенных механическим приводом средств при идентификации резервуара подлежащего дозированию ингредиента считывающими средствами идентификатора и размещении устройства напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами получения, и заданного значения массы ингредиента.
Указанные технические средства позволяют пользователю свободно перемещать устройство между различными резервуарами, содержащими подлежащие дозированию ингредиенты. Кроме того, средства считывания идентификатора обеспечивают подтверждение того факта, что пользователь представляет устройство для дозирования с резервуаром, содержащим надлежащий ингредиент.
Кроме того, вследствие того, что измерение массы ингредиента осуществляют непрерывно, ошибка при измерении массы ингредиента находится в заранее заданных пределах допустимых значений.
Таким образом, устройство может дозировать ингредиент после размещения устройства на подходящем резервуаре без необходимости какого-либо управления со стороны пользователя.
Наконец, наличие оснащенных механическим приводом средств на устройстве позволяет избежать необходимости снабжения каждого из резервуаров, содержащих ингредиенты, оснащенными механическим приводом средствами. Таким образом, снижена стоимость изготовления каждого из резервуаров.
В некоторых вариантах реализации устройство по настоящему изобретению содержит по меньшей мере два сосуда для размещения каждого из подлежащих дозированию ингредиентов, а средства управления выполнены с возможностью приведения в действие (при каждой смене сосуда) оснащенных механическим приводом средств, когда резервуар подлежащего дозированию ингредиента расположен напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами получения, и заданного значения массы ингредиента.
Указанные технические средства позволяют обеспечивать наполнение нескольких сосудов после обеспечения связи устройства с резервуаром с целью обеспечения последовательного производства, в соответствии с полученным значением массы.
В некоторых вариантах реализации устройство по настоящему изобретению содержит средства считывания идентификатора сосуда, и каждый сосуд содержит идентификатор.
Преимущество указанных вариантов реализации заключается в предотвращении случайного заполнения сосуда дважды, например, в случае смены сосуда на устройстве.
В некоторых вариантах реализации устройство по настоящему изобретению содержит средства беспроводной связи, выполненные с возможностью получения по меньшей мере одного заданного значения массы.
Указанные режимы реализации обеспечивают возможность удаленного изменения заданных значений массы пользователем.
В некоторых вариантах реализации устройство по настоящему изобретению содержит средства отображения по меньшей мере одного заданного значения массы и/или по меньшей мере одного идентификатора подлежащего дозированию ингредиента.
Преимущество указанных вариантов реализации заключается в обеспечении возможности подтверждения пользователем количественных значений, дозированных устройством, а также названия подлежащего дозированию ингредиента.
В некоторых вариантах реализации обеспечено приведение значения измерения массы посредством средств получения к нулевому значению перед задействованием оснащенных механическим приводом средств.
Преимущество указанных вариантов реализации заключается в получении для каждого из ингредиентов значения массы фактически размещенного в сосуде ингредиента после дозирования ингредиента.
В некоторых вариантах реализации оснащенные механическим приводом средства содержат двигатель, скорость которого зависит от разности между полученным значением массы и заданным значением массы ингредиента.
Таким образом, по мере приближения полученного значения массы к заданному значению массы ингредиента двигатель снижает скорость с целью обеспечения точного измерения ингредиента. Указанные варианты реализации обеспечивают скорость потока доставки ингредиента, пропорциональную доставляемому количеству ингредиента.
В некоторых вариантах реализации средства считывания идентификатора выполнены с возможностью наведения электромагнитного поля.
Указанные технические средства обеспечивают возможность взаимодействия устройства с носителем идентификатора на резервуаре, таким как RFID-чип (радиочастотной идентификации) или NFC-метка (ближней бесконтактной связи).
В некоторых вариантах реализации устройство по настоящему изобретению дополнительно содержит направляющую, выполненную напротив по меньшей мере одного резервуара, причем направляющая содержит средства перемещения устройства по направляющей.
Согласно второму аспекту, задача настоящего изобретения заключается в обеспечении резервуара, содержащего ингредиент, подлежащий дозированию посредством устройства по настоящему изобретению, причем резервуар содержит:
- средства удержания устройства в требуемом положении, соответствующие средствам направления устройства,
- средства доставки подлежащего дозированию ингредиента, приводимые в действие оснащенными механическим приводом средствами доставки устройства, носитель идентификатора ингредиента, размещенного в резервуаре, соответствующий средствам считывания устройства.
Указанные технические средства позволяют обеспечить пассивный резервуар, не содержащий каких-либо оснащенных механическим приводом средств. Таким образом, снижена стоимость изготовления подобного резервуара. Кроме того, каждый из резервуаров идентифицирует ингредиент, размещенный в резервуаре, и следовательно, дозируемый ингредиент является подлежащим дозированию ингредиентом.
В некоторых вариантах реализации средства доставки содержат шнек поворачиваемый оснащенными механическими приводом средствами доставки устройства.
Преимущество указанных вариантов реализации заключается в обеспечении возможности точного дозирования ингредиента.
В некоторых вариантах реализации средства доставки содержат вибрационные средства, приводимые в действие посредством оснащенных механическим приводом средств доставки устройства.
Указанные варианты реализации обеспечивают возможность равномерного распределения ингредиента в резервуаре с целью обеспечения единообразной доставки ингредиента.
В некоторых вариантах реализации средства доставки содержат средства придания ингредиенту текучести.
Преимущество указанных вариантов реализации заключается в обеспечении возможности избежания возможной агрегации порошкового ингредиента, способной привести к ошибкам измерения.
В некоторых вариантах реализации носитель идентификатора содержит электронную метку, приводимую в действие электромагнитным полем.
Указанные варианты реализации обеспечивают возможность удаленного взаимодействия между считывающими средствами устройства и носителем идентификатора резервуара.
Согласно третьему аспекту, задача настоящего изобретения заключается в обеспечении дозирующей системы по меньшей мере для одного ингредиента, содержащей по меньшей мере один резервуар по настоящему изобретению и по меньшей мере одно устройство по настоящему изобретению.
Вследствие того, что конкретные задачи, преимущества и характеристики системы по настоящему изобретению сходны с задачами, преимуществами и характеристиками устройства и резервуара по настоящему изобретению, их повторное описание опущено.
В некоторых вариантах реализации только устройство обеспечено электропитанием.
Указанные варианты реализации обеспечивают возможность выполнения всех элементов, за исключением устройства, в виде пассивных элементов. Например, вышеописанное справедливо для резервуаров, не требующих какого-либо питания.
Согласно четвертому аспекту, задача настоящего изобретения заключается в обеспечении способа дозирования по меньшей мере одного ингредиента, связанного с заданным значением массы, посредством системы по настоящему изобретению, причем способ включает следующие этапы:
- направление устройства в положение напротив по меньшей мере одного резервуара, содержащего подлежащий дозированию ингредиент,
- считывание идентификатора ингредиента на резервуаре, содержащем указанный ингредиент,
- доставку подлежащего дозированию ингредиента из резервуара,
- получение результата измерения массы ингредиента,
- приведение в действие оснащенных механическим приводом средств устройства при идентификации резервуара подлежащего дозированию ингредиента считывающими средствами идентификатора устройства и размещении устройства напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами получения, и заданного значения массы ингредиента.
Вследствие того, что конкретные задачи, преимущества и характеристики способа по настоящему изобретению сходны с задачами, преимуществами и характеристиками устройства, резервуара и системы по настоящему изобретению, их повторное описание опущено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие конкретные преимущества, задачи и характеристики настоящего изобретения очевидны при рассмотрении нижеследующего неограничивающего описания по меньшей мере одного конкретного варианта реализации устройства, резервуара, системы и способа по настоящему изобретению, приведенного со ссылкой на сопутствующие чертежи, на которых:
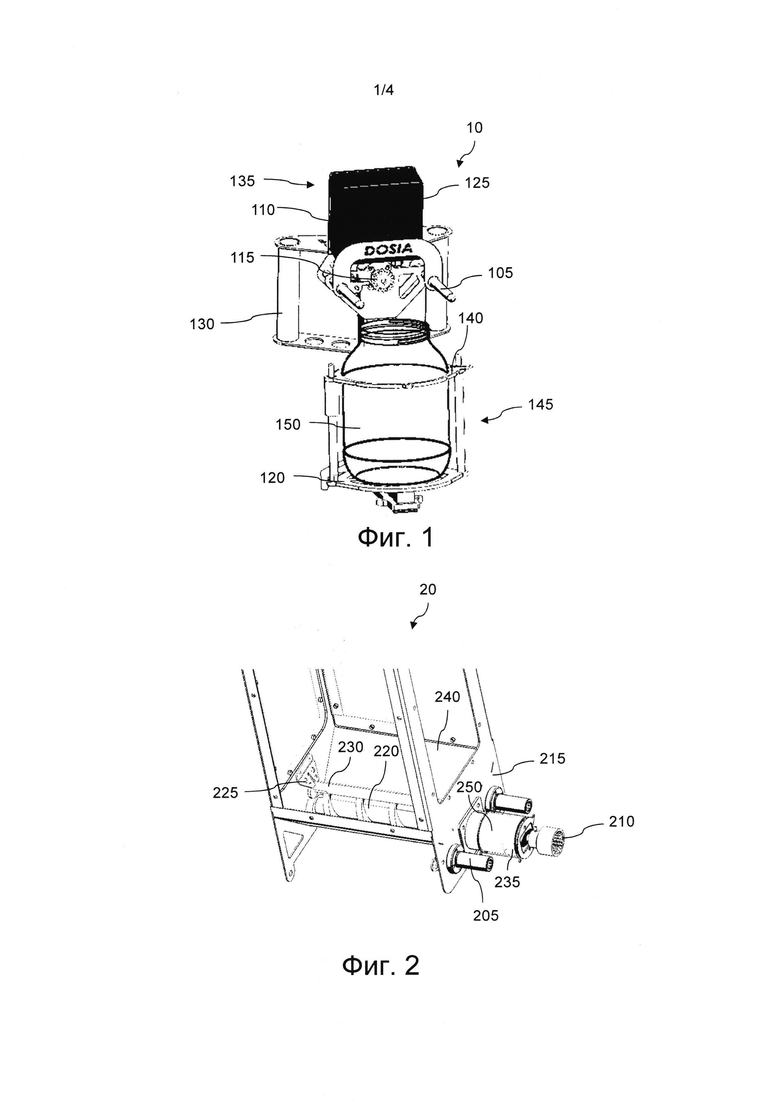
На фиг. 1 показан схематичный вид в перспективе первого конкретного варианта реализации устройства по настоящему изобретению,
На фиг. 2 показан схематичный вид в перспективе первого конкретного варианта реализации резервуара по настоящему изобретению,
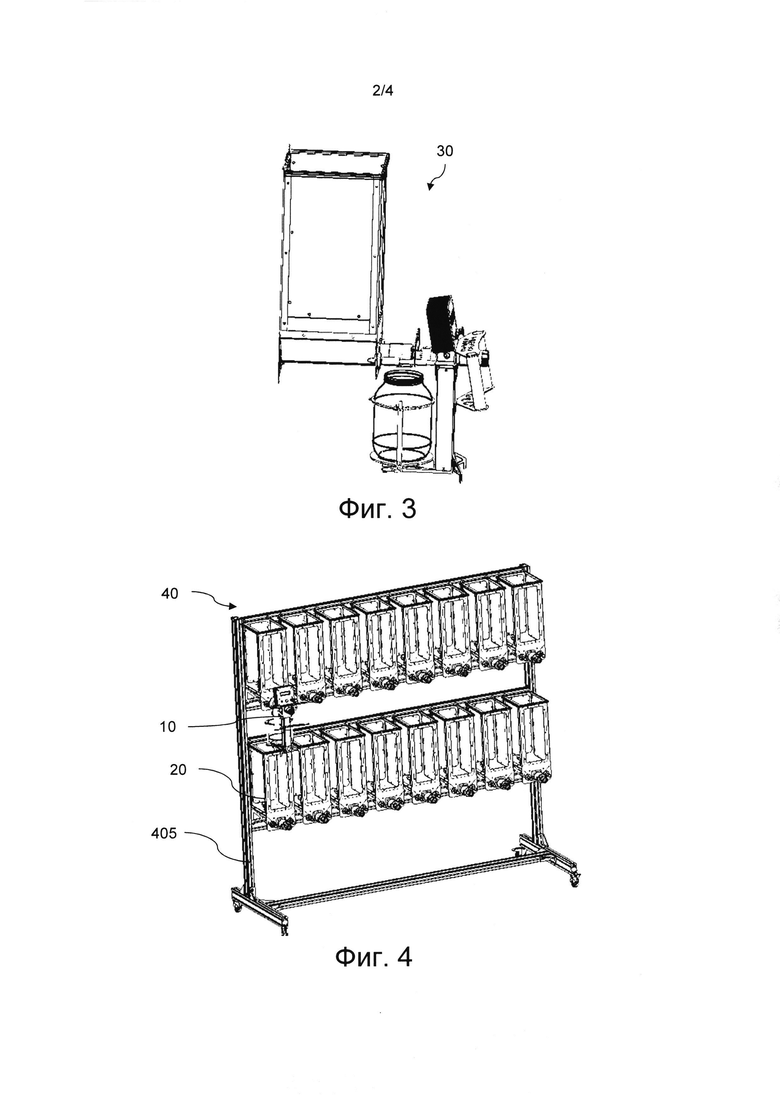
На фиг. 3 показан схематичный вид в перспективе первого конкретного варианта реализации системы по настоящему изобретению,
На фиг. 4 показан схематичный вид в перспективе второго конкретного варианта реализации системы по настоящему изобретению,
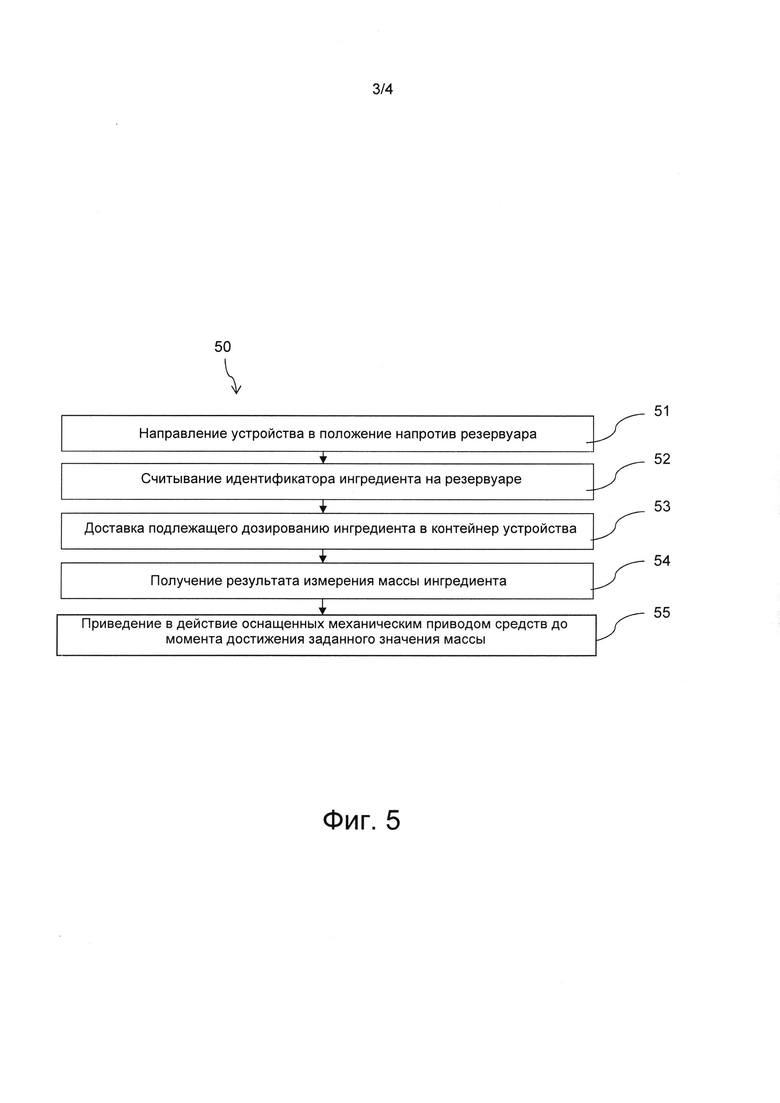
На фиг. 5 показана блок-схема последовательности конкретных этапов способа по настоящему изобретению,
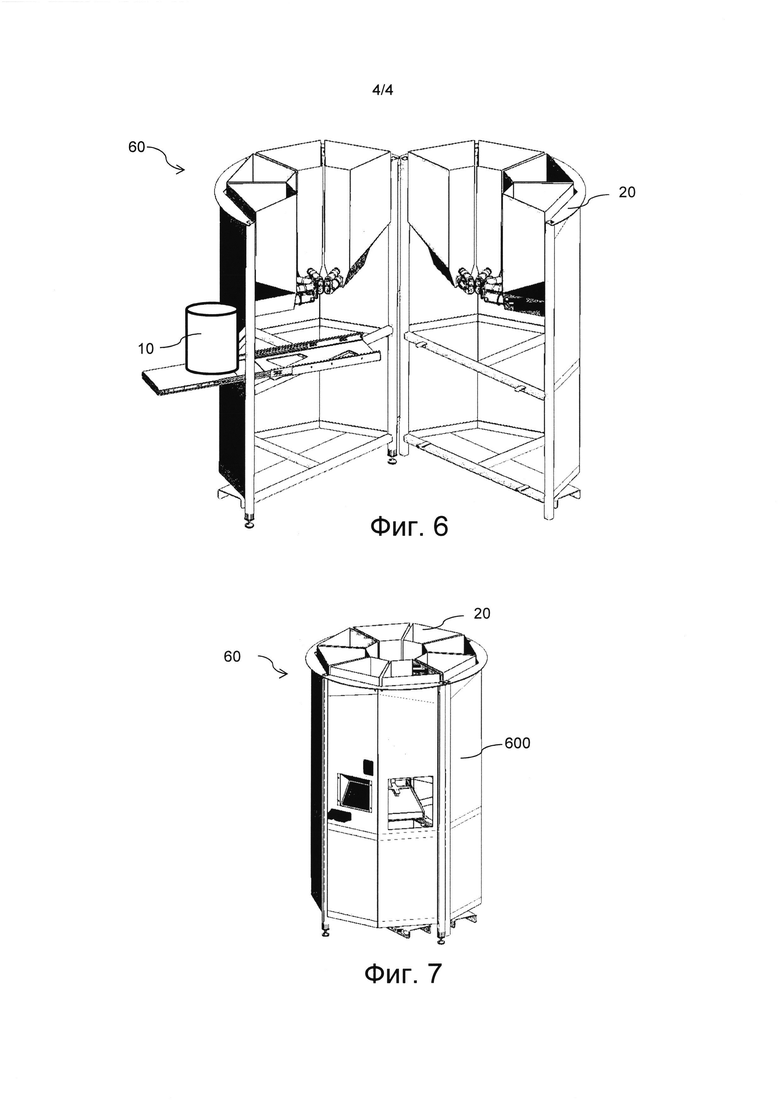
На фиг. 6 показан схематичный вид в перспективе третьего конкретного варианта реализации системы по настоящему изобретению, и
На фиг. 7 показан схематичный второй вид в перспективе третьего конкретного варианта реализации системы по настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Настоящее описание является неограничивающим, и каждая характеристика одного из вариантов реализации может быть совмещена с любой другой характеристикой любого другого варианта реализации с обеспечением соответствующего преимущества. Кроме того, каждый из параметров варианта реализации изобретения может быть реализован независимо от других параметров указанного варианта реализации.
Следует отметить, что чертежи приведены без соблюдения масштаба.
На фиг. 1, приведенной без соблюдения масштаба, показан схематичный вид устройства 10 по настоящему изобретению.
Переносное устройство 10 для дозирования по меньшей мере одного ингредиента, связанного с заданным значением массы, содержит средства 105 направления в положение напротив по меньшей мере одного резервуара 20, содержащего подлежащий дозированию ингредиент. Устройство 10 содержит раму. Направляющие средства 105 прикреплены к раме.
Средства 105 направления в положение представляют собой по меньшей мере один выступ, сцепленный с соответствующим выступом 205 на резервуаре 20. Предпочтительно, направляющие средства 105 представляют собой два параллельных осевых стержня. Средства 105 направления в положение выполнены таким образом, что сосуд 150 устройства 10 удерживают по существу в горизонтальном положении.
Предпочтительно, средства 105 направления в положение имеют контактную длину, например, ось стержней в случае использования стержней. Контактная длина выбрана таким образом, что обеспечена опора устройства посредством сосуда 20 при вводе направляющих средств 105 в соответствующие средства 205 резервуара 20.
Предпочтительно, средства 105 направления в положение предотвращают любой поворот устройства 10 относительно резервуара. Например, средства 105 направления в положение образуют скользящее механическое соединение между устройством 10 и резервуаром 20.
Устройство 10 содержит средства 110 считывания идентификатора ингредиента на резервуаре 20, содержащем указанный ингредиент. Например, идентификатор ингредиента может содержать идентификационный номер, название ингредиента, химический состав ингредиента. Считывающие средства 110 прикреплены к раме.
Средства 110 считывания идентификатора ингредиента соответствуют носителю 215 идентификатора резервуара 20. Предпочтительно, средства 110 считывания идентификатора выполнены с возможностью наведения электромагнитного поля в соответствии со стандартом ISO/CEI 14443. Средства 110 считывания идентификатора могут представлять собой RFID-чип (радиочастотной идентификации) или NFC-считыватель (ближней бесконтактной связи). В данных вариантах реализации носитель 215 идентификатора резервуара 20 содержит чип, содержащий идентификатор и антенну.
В других вариантах реализации средства 110 считывания представляют собой считыватель штрих-кода или двухмерного штрих-кода (также называемого QR-кодом (кодом быстрого реагирования) или матричным штрих-кодом). В данных вариантах реализации носитель 215 идентификатора представляет собой штрих-код или двухмерный штрих-код.
В других вариантах реализации считывающие средства 110 представляют собой датчик изображений, распознающий знаки. В данных вариантах реализации носитель 205 идентификатора представляет собой ярлык, отпечатанный и размещенный на резервуаре 20.
Устройство 10 содержит оснащенные механическим приводом средства 115 доставки подлежащего дозированию ингредиента из резервуара 20. Оснащенные механическим приводом средства 115 содержат двигатель и выступ, сцепленный с соответствующим выступом на резервуаре 20. Выступ выполнен подвижным, с возможностью поворота (вдоль оси) относительно устройства 10. Выступ поворачивают посредством двигателя. Двигатель для оснащенных механическим приводом средств прикреплен к раме. Предпочтительно, двигатель обеспечивает скорость поворота от 0 до 120 об/мин.
Предпочтительно, выступ представляет собой вал, содержащий пазы, а соответствующий выступ на резервуаре 20 представляет собой втулку, содержащую соответствующие пазы. В других вариантах реализации выступ представляет собой втулку, содержащую пазы, а соответствующий выступ на резервуаре 20 представляет собой вал, содержащий соответствующие пазы. Связь между пазами вала и втулки обеспечивает передачу электропитания.
В вариантах реализации, в которых направляющие средства 105 представляют собой два параллельных осевых стержня, ось поворота выступа параллельна осям стержней и расположена на равном расстоянии от осей стержней. Указанные варианты реализации обеспечивают возможность равномерного распределения сил, вызываемых приводом оснащенных механическим приводом средств 115, по каждому из стержней.
Оснащенные механическим приводом средства 115 и направляющие средства 105 расположены на одной поверхности устройства 10. Предпочтительно, считывающие средства 110 расположены на одной стороне указанной поверхности.
Устройство 10 содержит средства 120 получения результата измерения массы ингредиента. Средства 120 получения результата измерения массы ингредиента предпочтительно выступают с другой стороны указанной поверхности. Средства 120 получения результата измерения массы представляют собой весы. Предпочтительно, весы представляют собой электронные весы, причем одна часть весов прикреплена к раме устройства 10, а другая часть выполнена подвижной и размещена под сосудом 150.
В предпочтительных вариантах реализации средства 120 получения выполнены таким образом, что отверстие сосуда 150 расположено под отверстием для доставки ингредиента из резервуара 20. Размеры между средствами 120 получения представляют собой оснащенные механическим приводом средства 115, а средства 105 направления в положение превышают размеры сосуда 150.
Предпочтительно, устройство 10 содержит средства 140 удержания сосуда 150 в требуемом положении. Средства 140 удержания сосуда 150 в требуемом положении представляют собой выступ, по меньшей мере частично охватывающий сосуд 150. Средства 140 удержания в требуемом положении прикреплены к раме и расположены между средствами 120 получения и средствами 105 направления в положение или оснащенными механическим приводом средствами 115.
Средства 140 удержания в требуемом положении могут быть выполнены с возможностью удержания сосудов 150, выполненных в виде пакетов или бачков, в требуемом положении.
Устройство 10 содержит средства 125 управления, выполненные с возможностью приведения в действие оснащенных механическим приводом средств 115 при идентификации резервуара 20 подлежащего дозированию ингредиента средствами 110 считывания идентификатора и размещении устройства 10 напротив резервуара 20, до момента обеспечения равенства значения массы ингредиента, полученного средствами 120 получения, и заданного значения массы ингредиента.
Устройство 10 может надлежащим образом дозировать ингредиент после размещения устройства на резервуаре 20 без необходимости какого-либо управления со стороны пользователя.
Средства 125 управления предпочтительно представляют собой микропроцессор, содержащий по меньшей мере одну компьютерную программу. В некоторых вариантах реализации при каждой смене сосуда 150 положение устройства 10 остается неизменным, а оснащенные механическим приводом средства 115 приводят в действие средствами 125 управления. Двигатель оснащенных механическим приводом средств 115 обладает скоростью поворота, управляемой средствами управления соответственно полученному значению массы. Скорость двигателя оснащенных механическим приводом средств 115 зависит от разности между полученным значением массы и заданным значением массы ингредиента.
Таким образом, по мере приближения полученного значения массы к заданному значению массы ингредиента скорость двигателя снижают с целью обеспечения точного дозирования ингредиента. Указанные варианты реализации обеспечивают скорость потока доставки, пропорциональную доставляемому количеству ингредиента.
В некоторых вариантах реализации направляющие средства 105 содержат датчик позиционирования. Датчик позиционирования может представлять собой индукционный датчик, приводимый в действие, например, средствами 205 удержания резервуара 20 в требуемом положении. Предпочтительно, датчик позиционирования определяет факт надлежащего размещения устройства 10 в резервуаре 20.
В некоторых вариантах реализации устройство 10 содержит средства 145 считывания идентификатора сосуда 150, а каждый из сосудов 150 содержит идентификатор. Например, идентификатор сосуда 150 может содержать идентификационный номер, название ингредиента, или химический состав ингредиента. Считывающие средства 145 прикреплены к раме.
Средства 145 считывания идентификатора ингредиента соответствуют носителю идентификатора сосуда 150. Предпочтительно, средства 145 считывания идентификатора выполнены с возможностью наведения электромагнитного поля в соответствии со стандартом ISO/CEI 14443. Средства 145 считывания идентификатора могут представлять собой считыватель RFID-чипа (радиочастотной идентификации) или NFC-считыватель (ближней бесконтактной связи). В данных вариантах реализации носитель идентификатора сосуда 150 содержит чип, содержащий идентификатор и антенну.
В других вариантах реализации средства 145 считывания представляют собой считыватель штрих-кода или двухмерного штрих-кода (также называемого QR-кодом (кодом быстрого реагирования) или матричным штрих-кодом). В данных вариантах реализации носитель идентификатора представляет собой штрих-код или двухмерный штрих-код.
В других вариантах реализации считывающие средства 145 представляют собой датчик изображений, распознающий знаки. В данных вариантах реализации носитель идентификатора представляет собой ярлык, отпечатанный и размещенный на сосуде 150.
Предпочтительно, средства 125 управления содержат средства сравнения полученного значения массы с заданным значением массы.
В некоторых вариантах реализации устройство 10 содержит средства беспроводной связи, выполненные с возможностью получения по меньшей мере одного заданного значения массы. Предпочтительно, средства беспроводной связи представляют собой средства связи по протоколу IEEE 802.11 (или Wi-Fi) или посредством Bluetooth.
Предпочтительно, устройство 10 может отправлять данные об измерении массы каждого из ингредиентов, полученных средствами 210 получения, на терминал связи. Указанные варианты реализации обеспечивают лучшую возможность контроля для каждой из смесей.
Устройство 10 содержит средства хранения заданного значения массы и идентификатора подлежащего захвату ингредиента, связанные со средствами 125 управления.
В некоторых вариантах реализации устройство 10 содержит средства 135 отображения по меньшей мере одного заданного значения массы и/или по меньшей мере одного идентификатора подлежащего дозированию ингредиента. Например, средства 135 отображения представляют собой экран.
В некоторых вариантах реализации устройство 10 содержит средства ручного управления. Указанные ручные средства могут представлять собой человеко-машинный интерфейс любого вида, известного специалисту.
В некоторых вариантах реализации устройство 10 связывается с терминалом связи посредством средств беспроводной связи. Терминал связи отправляет на устройство 10 данные, относящиеся к:
- идентификатору каждого из резервуаров 20, с которыми устройство 10 должно быть связано с целью получения ингредиента,
- количеству каждого из подлежащих дозированию ингредиентов в виде заданного значения массы,
- порядку, в котором надлежит осуществлять дозирование ингредиентов, и
например, указанию о пределах допустимых значений, относящихся к заданной массе каждого из ингредиентов.
Средства 135 отображения могут отображать все или некоторые из переданных данных. Средства ручного управления выполнены с возможностью подтверждения, выбора или отмены команд, отображенных, например, на средствах 135 отображения.
Предпочтительно, устройство 10 содержит автономный источник питания, обеспечивающий электропитанием оснащенные механическим приводом средства 115, средства 120 получения результата измерения массы, средства 125 управления, средства 135 отображения, считывающие средства 110, и любой другой компонент устройства 10, требующий подачи электроэнергии.
Предпочтительно, средства 125 управления расположены на стороне поверхности, противоположной относительно стороны, содержащей направляющие средства 105.
В некоторых вариантах реализации на стороне, содержащей средства 125 управления, также расположены ручки 130 для перемещения устройства. Предпочтительно, ручки 130 равномерно распределены вокруг оси оснащенных механическим приводом средств 115.
В некоторых вариантах реализации значение измерения массы посредством средств 120 получения приводят к нулевому значению перед задействованием оснащенных механическим приводом средств 115. Указанная калибровка позволяет определять только массу нового ингредиента, размещенного в приемнике 150.
В некоторых вариантах реализации устройство 10 также содержит направляющую 600, выполненную напротив по меньшей мере одного резервуара 20, причем направляющая 600 содержит средства перемещения устройства по направляющей 600. Направляющая 600 содержит средства позиционирования по меньшей мере одного резервуара 20 относительно направляющей 600. Например, средства позиционирования представляют собой зажим, прикрепленный к направляющей 600, в который вводят резервуар 20. Средства перемещения представляют собой, например, шаговый двигатель, для которого положение каждого из резервуаров 20 предварительно сохранено в средствах управления. В других вариантах реализации позиционирование каждого из резервуаров 20 определяют посредством привода, такого как электрический контакт, приводимый в действие при размещении устройства 10 в направляющей 600 напротив резервуара 20. Затем резервуар 20 идентифицируют посредством идентификатора ингредиента на резервуаре 20. Например, устройство 10 закрепляют на платформе на направляющей 600, причем платформа связана со средствами перемещения посредством винтовой связи, такой как шнек.
На фиг.6 и 7 показана система 60 по настоящему изобретению, содержащая 8 резервуаров 20 и одну направляющую 600. Резервуары 20 расположены на периферии устройства 10. Устройство 10 повернуто таким образом, что оно расположено напротив подходящего резервуара 20.
На фиг. 2 показан конкретный вариант реализации резервуара 20 по настоящему изобретению.
Резервуар 20 содержит ингредиент, подлежащий дозированию посредством устройства 10. Сосуд 20 по существу имеет форму параллелепипеда. Наиболее длинные стороны в рабочем положении резервуара 20 расположены по существу вертикально. Одна из по существу горизонтальных поверхностей содержит съемное отверстие. Другая по существу горизонтальная поверхность содержит две наклонных плоскости 240. Угол наклона наклонных плоскостей 240 предпочтительно составляет от 30° до 60°. Наклонные плоскости 240 реализованы с пересечением в средней части поверхности таким образом, что пересечение удалено от центра тяжести резервуара на большее расстояние по сравнению с расстоянием от центра тяжести поверхности, содержащей пересечения наклонных плоскостей 240 с параллелепипедом.
В рабочем режиме резервуара 20 отверстие резервуара по существу расположено горизонтально, а наклонные плоскости 240 расположены ближе к земле, чем к отверстию, в результате чего ингредиент, размещенный в сосуде, выходит под воздействием силы тяжести из отверстия по направлению к пересечению наклонных плоскостей 240. Объем, заданный параллелепипедом, отверстием и наклонными плоскостями 240, представляет собой объем, в который поступает доставляемый ингредиент.
Резервуар 20 содержит средства 205 удержания устройства 20 в требуемом положении, соответствующие направляющим средствам 105 устройства 10. Предпочтительно, средства 205 удержания в требуемом положении представляют собой по меньшей мере один выступ, сцепленный с соответствующим выступом 105 на устройстве 10. Предпочтительно, резервуар 20 содержит количество выступов 205 для удержания в требуемом положении, равное количеству направляющих выступов 105 устройства 10.
Предпочтительно, средства 205 удержания в требуемом положении представляют собой два сквозных отверстия с параллельными осями. Средства 205 удержания в требуемом положении выполнены таким образом, что сосуд 150 устройства 10 удерживают по существу в горизонтальном положении. Предпочтительно, сквозные отверстия пересекают поверхность резервуара 20 без образования отверстия в объеме, в который поступает доставляемый ингредиент.
Предпочтительно, средства 205 удержания в требуемом положении имеют контактную длину, например, вдоль оси стержней в случае использования стержней. Контактная длина выбрана таким образом, что обеспечена опора устройства 10 посредством сосуда 20 при вводе направляющих средств 105 в средства 205 удержания резервуара 20 в требуемом положении.
Предпочтительно, средства 205 удержания в требуемом положении предотвращают любой поворот устройства 10 относительно резервуара 20. Например, средства 105 направления в положение, сцепленные со средствами 205 удержания в требуемом положении, образуют скользящее механическое соединение между устройством 10 и резервуаром 20.
Предпочтительно, отверстия расположены на поверхности нормального резервуара на оси пересечения наклонных плоскостей 240.
Резервуар 20 содержит средства 210 доставки подлежащего дозированию ингредиента, приводимые в действие оснащенными механическим приводом средствами 115 доставки устройства 10.
Предпочтительно, средства 210 доставки расположены между двумя отверстиями на равном расстоянии от каждого из отверстий 205. Средства 210 доставки связаны посредством отверстия с объемом, в который поступает доставляемый ингредиент.
Средства 210 доставки содержат по меньшей мере один выступ, сцепленный с соответствующим выступом на оснащенных механическим приводом средствах 115 устройства 10. Выступ выполнен подвижным, с возможностью поворота (вдоль оси) относительно резервуара 20. Ось поворота параллельна оси пересечения наклонных плоскостей 240. Кроме того, точка оси поворота совпадает с центром тяжести параллелепипеда и точкой оси пересечения наклонных плоскостей 240. Выступ поворачивают посредством двигателя оснащенных механическим приводом средств 115 устройства 10.
Предпочтительно, выступ представляет собой втулку, содержащую пазы, соответствующие пазам вала оснащенных механическим приводом средств 115. В других вариантах реализации выступ представляет собой вал, содержащий пазы, а соответствующий выступ на устройстве 10 представляет собой втулку, содержащую соответствующие пазы. Связь между пазами вала и втулки обеспечивает передачу усилия.
Выступ образует отверстие в поверхности, на которой расположены средства 210 доставки.
В предпочтительных вариантах реализации втулка, поворачиваемая посредством оснащенных механическим приводом средств 115, связана посредством шнека 220. Средства 210 доставки содержат шнек 220 на оси поворота оснащенных механическим приводом средств 115, поворачиваемый посредством оснащенных механическим приводом средств 115 доставки устройства 10. Предпочтительно, оснащенные механическим приводом средства 115 поворачивают против часовой стрелки, и указанные средства обращены к поверхности, содержащей средства 210 доставки, в случае, если шнек снабжен правой резьбой, и по часовой стрелке в случае, если шнек 220 снабжен левой резьбой.
Предпочтительно, резьба шнека 220 проходит по касательной относительно наклонных плоскостей 240. Длина шнека 220 превышает длину участка пересечения наклонных плоскостей 240. Следовательно, при повороте шнека 220 ингредиент проходит по трубке 250 с круглым сечением, содержащей отверстие, сквозь которое, ингредиент выпадает под действием силы тяжести в сосуд 150.
В некоторых вариантах реализации средства 210 доставки содержат вибрационные средства 225 и 230, приводимые в действие оснащенными механическим приводом средствами 115 доставки устройства 10.
Вибрационные средства 225 и 230 содержат пластину 230, проходящую по касательной к резьбе шнека 220 и в нормальной плоскости обращенную к поверхности, содержащей средства 210 доставки и содержащей ось пересечения наклонных плоскостей 240. Пластина 230 проходит продольно относительно оси пересечения наклонных плоскостей 240 и имеет размеры, по существу равные длине участка пересечения наклонных плоскостей 240. Пластина 230 прикреплена вдоль одного конца к поверхности параллелепипеда, содержащей средства 210 доставки и содержит, на другом конце, диск, находящийся в контакте со шнеком 220. Крепление представляет собой сферическое соединение.
В некоторых вариантах реализации вибрационные средства 225 и 230 представляют собой средства доставки 210 и содержат вибрационную наклонную пластину для высвобождения ингредиента.
Предпочтительно, шнек 220 содержит кулачок, находящийся в контакте с диском пластины 230.
Поверхность, противоположная поверхности, содержащей средства 210 доставки, содержит направляющую 225, содержащую продольное отверстие, в которое вводят пластину.
Таким образом, при повороте оснащенных механическим приводом средств 115 шнек поворачивается, а конец пластины 230 перемещается в направляющей 225 с перемещением ингредиента в резервуар, позволяющим избежать пульсации ингредиента. Скорость поворота оснащенных механическим приводом средств 115 таким образом достаточна для обеспечения колебаний посредством пластины 230 и направляющей 225.
Предпочтительно, средства 210 доставки содержат средства 235 придания ингредиенту текучести. Предпочтительно, средства 235 придания ингредиенту текучести представляют собой по меньшей мере одну лапку 235, прикрепленную к оси шнека 220 в трубке 250. Каждая из лапок 235 обеспечивает измельчение сжатого ингредиента, перемещаемого шнеком 220 в трубку 250 и устранение любых возможных агрегатов.
В некоторых вариантах реализации трубка 250 содержит заслонку, открываемую посредством средств 210 доставки в ходе поворота оснащенных механическим приводом средств 115. Заслонку закрывают при остановке поворота оснащенных механическим приводом средств 115. Заслонка позволяет избежать какой-либо частичной доставки подлежащего дозированию ингредиента в ходе размещения устройства 10 на резервуаре 20, не содержащем указанного ингредиента. Предпочтительно, заслонка выполнена на отверстии трубки 250, через которое ингредиент выпадает в сосуд 150 под действием силы тяжести. Заслонку открывают непосредственно перед доставкой и закрывают непосредственно после доставки. Подобные варианты реализации позволяют избежать выпадения ингредиента в сосуд в ходе "стыковки" (также называемой размещением) устройства 10 на резервуаре 20, и в ходе этапа отведения устройства 10 от резервуара 20.
Заслонка может представлять собой трубку, концентрическую относительно трубки 250, и соответственно, внутренний диаметр заслонки по существу равен внешнему диаметру трубки 250. Заслонка связана с трубкой 250 путем скользящего соединения. Активизация оснащенных механическим приводом средств 115 приводит к скользящему перемещению заслонки поверх трубки 250 и к высвобождению отверстия трубки 250.
Резервуар 20 содержит носитель 215 идентификатора ингредиента, размещенного в резервуаре 20, соответствующий считывающим средствам 110 устройства 10.
Предпочтительно, носитель 215 идентификатора расположен на поверхности, содержащей средства 210 доставки. Например, идентификатор ингредиента может содержать идентификационный номер, название ингредиента, химический состав ингредиента.
Предпочтительно, в случае, если средства 110 считывания идентификатора предпочтительно выполнены с возможностью наведения электромагнитного поля в соответствии со стандартом ISO/CEI 14443, носитель 215 идентификатора содержит электронную метку, приводимую в действие электромагнитным полем, такую как NFC- или RFID-метка.
В других вариантах реализации средства 110 считывания представляют собой считыватель штрих-кода или двухмерного штрих-кода (также называемого QR-кодом (кодом быстрого реагирования) или матричным штрих-кодом). В данных вариантах реализации носитель 215 идентификатора представляет собой штрих-код или двухмерный штрих-код.
В других вариантах реализации считывающие средства 110 представляют собой датчик изображений, распознающий знаки. В данных вариантах реализации носитель 215 идентификатора представляет собой ярлык, отпечатанный и размещенный на резервуаре 20.
На фиг. 3 показан вариант реализации системы 30 доставки по меньшей мере одного ингредиента, содержащей резервуар 20 и устройство 10. В варианте реализации системы по фиг. 4 средства 105 направления в положение устройства 10 вводят в средства 205 удержания резервуара 20. Резервуар 20 идентифицируют посредством средств 110 считывания, а оснащенные механическим приводом средства 115 сцеплены со средствами 210 доставки резервуара 20.
В некоторых вариантах реализации только устройство 10 обеспечено электропитанием.
Указанные варианты реализации обеспечивают возможность выполнения всех элементов, за исключением устройства 10, в виде пассивных элементов. Например, вышеописанное справедливо для резервуаров 20, не требующих какого-либо питания.
Следует понимать, что в настоящем описании устройство 10 называют "активным" вследствие того, что устройство 10 содержит элементы двигателя для доставки ингредиента. Кроме того, резервуар 20 называют "пассивным" вследствие того, что при отсутствии приведения в действие посредством средств устройства 10 доставка ингредиента не осуществляется.
На фиг. 4 показан вариант реализации системы 40 дозирования по меньшей мере одного ингредиента, содержащей несколько резервуаров 20 и устройство 10. Резервуары 20 распределены в виде двух рядов на полке 405. Полка 405 содержит восемь резервуаров 20 в каждом из рядов.
В варианте реализации системы 40 по фиг. 4 средства 105 направления в положение устройства 10 вводят в средства 205 удержания резервуара 20. Резервуар 20 идентифицируют посредством средств 110 считывания, а оснащенные механическим приводом средства 115 сцеплены со средствами 210 доставки резервуара 20.
Процесс 50 дозирования по меньшей мере одного ингредиента, связанного с заданным значением массы, посредством системы 30 или 40 проиллюстрирован на фиг.5 и включает следующие этапы:
- направление 51 устройства 10 в положение напротив по меньшей мере одного резервуара 20, содержащего подлежащий дозированию ингредиент,
- считывание 52 идентификатора ингредиента на резервуаре 20, содержащем указанный ингредиент,
- доставку 53 подлежащего дозированию ингредиента из резервуара 20,
- получение 54 результата измерения массы ингредиента,
- приведение в действие 55 оснащенных механическим приводом средств устройства 10 при идентификации резервуара 20 подлежащего дозированию ингредиента средствами 110 считывания идентификатора устройства 10 и размещении устройства 10 напротив резервуара 20, до момента обеспечения равенства значения массы ингредиента, полученного средствами 120 получения, и заданного значения массы ингредиента.
Предпочтительно, этапы способа 50 выполняют в вышеописанном порядке.
Предпочтительно, перед этапом 51 направления реализован этап связи между терминалом связи и устройством 10. На указанном этапе терминал связи отправляет на устройство 10 данные, сохраненные в памяти средств 125 управления и относящиеся к:
- идентификатору каждого из резервуаров 20, с которыми устройство 10 должно быть связано с целью получения ингредиента,
- количеству каждого из подлежащих дозированию ингредиентов в виде заданного значения массы,
- порядку, в котором надлежит осуществлять дозирование ингредиентов, и
например, указанию о пределах допустимых значений, относящихся к заданной массе каждого из ингредиентов.
Способ 50 может также включать этап отображения всех данных или части полученных данных на средствах 135 отображения устройства 10.
В ходе этапа 51 направления пользователь вручную управляет устройством 10 до зацепления направляющих средств 105 устройства 10 со средствами 205 удержания резервуара. Способ 50 может включать этап определения факта удержания устройства 10 в требуемом положении. При отсутствии факта обнаружения позиционирования и удержания устройства в требуемом положении (например, посредством датчика присутствия), способ обеспечивает отображение сообщения, указывающего пользователю на тот факт, что устройство 10, например, неверно позиционировано относительно резервуара 20.
После осуществления этапа направления считывающие средства 110 устройства 10 выполняют этап 52 считывания идентификатора ингредиента на резервуаре 20, содержащем указанный ингредиент. Считывающие средства 110 считывают носитель 215 идентификатора на резервуаре 20.
В случае соответствия считанного идентификатора сохраненному идентификатору в порядке, сохраненном в средствах 125 управления, средства управления переходят к выполнению этапа 53 доставки, этапа 54 получения и этапа 55 приведения в действие. В противном случае на средствах 135 отображения отображают сообщение, указывающее на несоответствие данного резервуара резервуару, доставляющему ингредиент для дозирования.
Этап 53 доставки, этап 54 получения и этап 55 приведения в действие реализуют одновременно. Таким образом, реализуют этап 55 приведения в действие, вследствие чего осуществляют доставку 53 ингредиента до тех пор, пока масса ингредиента, полученная посредством средств 120 получения на этапе 54 получения, не будет равна заданному значению массы для данного ингредиента.
Выполнение этапа приведения в действие прекращают при достижении массой ингредиента, полученной в ходе этапа получения, границ пределов допустимых заданных значений массы для указанного ингредиента.
В некоторых вариантах реализации перед каждым этапом 55 приведения в действие этап 54 получения массы посредством средств 120 получения приводит к обнулению путем скидки на тару результата измерения массы средств 120 получения. Способ 50 может включать этап обнуления результата измерения массы.
В некоторых вариантах реализации пользователь может сменить сосуд 150 после остановки этапа 55 приведения в действие. В данных вариантах реализации пользователь дает средствам управления указание о повторном выполнении этапа 53 доставки, этапа 54 получения и этапа 55 приведения в действие для нового сосуда и прежнего ингредиента. Этап дачи указания средствам управления может быть реализован посредством средств ручного управления.
Изобретение относится к переносному устройству дозирования, к резервуару, содержащему ингредиент, подлежащий дозированию таким устройством, к системе дозирования и к способу дозирования. Переносное устройство (10) для дозирования ингредиента, которому назначено заданное значение массы, содержащее средства (105) направления в положение напротив резервуара, средства (110) считывания идентификатора ингредиента на резервуаре, содержащем указанный ингредиент, оснащенные механическим приводом средства (115) доставки подлежащего дозированию ингредиента из резервуара, средства (120) получения результата измерения массы ингредиента, средства (125) управления, выполненные с возможностью приведения в действие оснащенных механическим приводом средств при идентификации резервуара средствами считывания идентификатора и размещении устройства напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами получения, и заданного значения массы ингредиента. Техническим результатом является возможность измерения массы ингредиента в заранее заданных пределах допустимых значений, а также возможность перемещения устройства между различными резервуарами с их одновременной идентификацией. 4 н. и 13 з.п. ф-лы, 7 ил.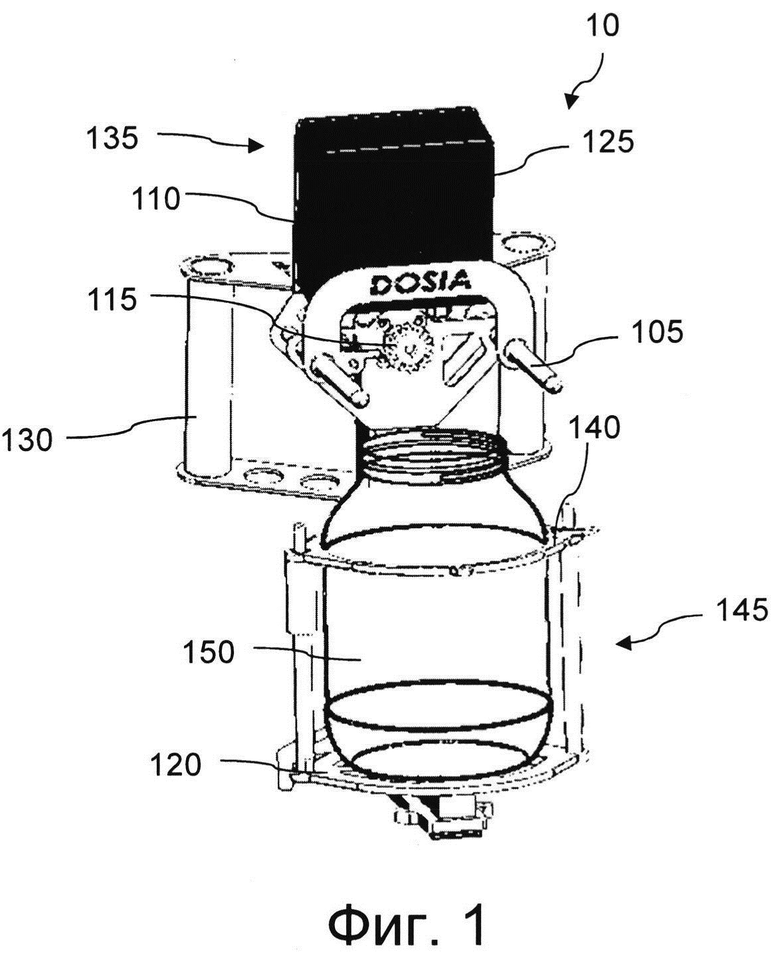
1. Переносное устройство (10) для дозирования по меньшей мере одного ингредиента, которому назначено заданное значение массы, отличающееся тем, что оно содержит:
- средства (105) направления в положение напротив по меньшей мере одного резервуара (20), содержащего подлежащий дозированию ингредиент,
- средства (110) считывания идентификатора ингредиента на резервуаре, содержащем указанный ингредиент,
- оснащенные механическим приводом средства (115) доставки подлежащего дозированию ингредиента из резервуара,
- средства (120) получения результата измерения массы ингредиента,
- средства (125) управления, выполненные с возможностью приведения в действие оснащенных механическим приводом средств при идентификации резервуара подлежащего дозированию ингредиента средствами считывания идентификатора и размещении устройства напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами получения, и заданного значения массы ингредиента.
2. Устройство (10) по п. 1, содержащее по меньшей мере два сосуда (150) для размещения каждого из подлежащих дозированию ингредиентов, причем средства (125) управления выполнены с возможностью приведения в действие, при каждой смене сосуда, оснащенных механическим приводом средств (115) в положении, в котором резервуар (20) подлежащего дозированию ингредиента идентифицирован посредством средств (110) считывания идентификатора, а устройство расположено напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами (120) получения, и заданного значения массы ингредиента.
3. Устройство (10) по п. 2, содержащее средства (145) считывания идентификатора сосуда (150), причем каждый сосуд содержит идентификатор.
4. Устройство (10) по одному из пп. 1-3, содержащее средства беспроводной связи, выполненные с возможностью получения по меньшей мере одного заданного значения массы.
5. Устройство (10) по одному из пп. 1-4, содержащее средства (135) отображения по меньшей мере одного заданного значения массы и/или по меньшей мере одного идентификатора подлежащего дозированию ингредиента.
6. Устройство (10) по одному из пп. 1-5, в котором обеспечено приведение значения измерения массы посредством средств (120) получения к нулевому значению перед задействованием оснащенных механическим приводом средств (125).
7. Устройство (10) по одному из пп. 1-6, в котором оснащенные механическим приводом средства (115) содержат двигатель, скорость которого зависит от разности между полученным значением массы и заданным значением массы ингредиента.
8. Устройство (10) по одному из пп. 1-7, в котором средства (110) считывания идентификатора выполнены с возможностью наведения электромагнитного поля.
9. Устройство (10) по одному из пп. 1-8, также содержащее направляющую (600), выполненную напротив по меньшей мере одного резервуара (20), причем направляющая содержит средства перемещения устройства (10) по направляющей.
10. Резервуар (20), содержащий ингредиент, подлежащий дозированию устройством (10) по одному из пп. 1-9, отличающийся тем, что он содержит:
- средства (205) удержания устройства в требуемом положении, соответствующие направляющим средствам (105) устройства,
- средства (210) доставки подлежащего дозированию ингредиента, приводимые в действие оснащенными механическим приводом средствами (115) доставки устройства, и
- носитель (215) идентификатора ингредиента, размещенного в резервуаре, соответствующий средствам (110) считывания устройства.
11. Резервуар (20) по п. 10, в котором средства (210) доставки содержат шнек (220), поворачиваемый оснащенными механическими приводом средствами (115) доставки устройства (10).
12. Резервуар (20) по одному из пп. 10, 11, в котором средства (210) доставки содержат вибрационные средства (225, 230), приводимые в действие оснащенными механическими приводом средствами (115) доставки указанного устройства.
13. Резервуар (20) по одному из пп. 10-12, в котором средства (210) доставки содержат средства (235) придания ингредиенту текучести.
14. Резервуар (20) по одному из пп. 10-13, в котором носитель (215) идентификатора содержит электронную метку, активируемую электромагнитным полем.
15. Система (30, 40, 60) дозирования по меньшей мере одного ингредиента, содержащая по меньшей мере один резервуар (20) по одному из пунктов 10-14 и по меньшей мере одно устройство (10) по одному из пп. 1-9.
16. Система (30, 40, 60) по п. 15, в которой только устройство (10) обеспечено электропитанием.
17. Способ (50) дозирования по меньшей мере одного ингредиента, связанного с заданным значением массы, посредством системы (30, 40) по одному из пп. 15 или 16, отличающийся тем, что он включает следующие этапы:
- направление (51) устройства (10) в положение напротив по меньшей мере одного резервуара (20), содержащего подлежащий дозированию ингредиент,
- считывание (52) идентификатора ингредиента на резервуаре, содержащем указанный ингредиент,
- доставку (53) подлежащего дозированию ингредиента из резервуара,
- получение (54) результата измерения массы ингредиента и
- приведение в действие (55) оснащенных механическим приводом средств (115) устройства при идентификации резервуара подлежащего дозированию ингредиента средствами (110) считывания идентификатора устройства и размещении устройства напротив резервуара, до момента обеспечения равенства значения массы ингредиента, полученного средствами получения, и заданного значения массы ингредиента.
| CN 101606045 A, 16.12.2009 | |||
| US 9052228 B2, 09.06.2015 | |||
| CN 102209886 A, 05.10.2011 | |||
| JP 62249019 A, 30.10.1987 | |||
| US 8176947 B2, 15.05.2012. |

