Изобретение относится к измерительной технике, а именно к способам и средствам, предназначенным для измерения расхода жидкостей, и может быть использовано в различных отраслях народного хозяйства для целей контроля, регулирования и учета потоков среды. В частности, изобретение может быть использовано для определения расхода жидкости в скважине вихревым расходомером в условиях воздействия на него низкочастотных вибрационных нагрузок.
Известно, что для определения расхода жидкости в скважине вихревой расходомер устанавливают в ней в непосредственной близости от погружного электродвигателя (ПЭД), например, на выкиде насоса. Частота оборотов работы ПЭД, как правило, находится в диапазоне от 10 до 80 Гц. При этом на данных и кратных им частотах возникает вибрация. Эта вибрационная нагрузка передается по колонне НКТ близлежащему оборудованию, в том числе вихревому расходомеру. В случаях, когда частота и амплитуда вибрации приближаются к частоте вихреобразования, в частности, при низкочастотных вибрационных нагрузках, частота вибрации и частота полезного сигнала сливаются друг с другом и перестают различаться. Вследствие этого частота вибрации может ошибочно восприниматься устройством обработки расходомера как частота полезного сигнала, характеризующая расход жидкости. В результате это приводит к низкой точности и достоверности определения расхода жидкости.
Наиболее близким является способ определения расхода жидкости, реализованный в универсальном вихревом расходомере (патент РФ на изобретение №2192623, МПК G01F 1/32, 2000 г.), содержащем первичный преобразователь и электрическую схему обработки сигнала первичного преобразователя, которая содержит последовательно включенные первый нормирующий усилитель, фильтр, второй нормирующий усилитель и аналого-цифровой преобразователь, микроконтроллер, управляющие выходы которого подключены соответственно к управляющим входам первого и второго нормирующих усилителей, интерфейсы расходомера. Функцию адаптивно перестраиваемых фильтров выполняет алгоритм цифровой адаптивной фильтрации, реализованный в микроконтроллере. Способ осуществляется следующим образом. Получают сигнал с первичного преобразователя, производит выборку сигнала с частотой опроса, необходимой для восстановления сигнала в диапазоне измеряемых частот, оценивают уровень оцифрованного входного сигнала и выполняют автоматическую регулировку усиления, производит поиск и выделение сигнала вихревой частоты в соответствии с алгоритмом цифровой адаптивной фильтрации, вычисляют текущее значение вихревой частоты, вычисляют значение расхода. Способ позволяет определить скорость или расход жидкости жидких и газообразных сред в скважине при воздействии возмущений в виде вибрации трубопровода, пульсаций потока и акустических шумов.
Недостатками способа является низкая точность и достоверность определения расхода жидкости, в том числе при низкочастотных вибрационных нагрузках, поскольку способ не позволяет выделить вибрацию при смешении вибрации и полезного сигнала, характеризующего расход жидкости и исключить ее при определении расхода жидкости.
Наиболее близким является универсальный вихревой расходомер (патент РФ на изобретение №2192623, МПК G01F 1/32, 2000 г.), содержащий первичный преобразователь и электрическую схему обработки сигнала первичного преобразователя, которая содержит последовательно включенные первый нормирующий усилитель, фильтр, второй нормирующий усилитель и аналого-цифровой преобразователь, микроконтроллер, управляющие выходы которого подключены соответственно к управляющими входами первого и второго нормирующих усилителей, интерфейсы расходомера. Функцию адаптивно перестраиваемых фильтров выполняет алгоритм цифровой адаптивной фильтрации, реализованный в микроконтроллере. Устройство позволяет определить расход жидкости.
Недостатком является низкая точность определения расхода жидкости, поскольку отсутствует возможность измерения вибрации и, ее учета при определении расхода жидкости, в том числе при низкочастотных вибрационных нагрузках. Кроме того, при уменьшении скорости потока жидкости, происходит ослабление полезного сигнала расхода, при этом полезный сигнал становится соизмерим с нижними гармониками. Это ограничивает нижний предел измерения потока расходомера.
Целью изобретения является устранение указанных недостатков.
Технический результат заключается в повышении точности определения расхода жидкости за счет применения способа определения расхода жидкости в скважине, в том числе при низкочастотных вибрационных нагрузках.
Кроме того, технический результат также заключается в повышении точности определения расхода жидкости за счет обеспечения возможности измерить (выделить) вибрацию и возможности ее исключить при определении расхода жидкости, а также в расширении функциональных возможностей, заключающемся в расширении рабочего диапазона вихревого расходомера в области малых расходов.
Технический результат достигается в способе определения расхода жидкости, заключающемся в том, что первичным преобразователем непрерывно принимают сигнал, включающий полезную частотную составляющую, характеризующую скорость потока жидкости и шумовую частотную составляющую, характеризующую интенсивность вибрации. Полученный в текущий момент времени сигнал ПП оцифровывают и раскладывают в спектр. Посредством датчика вибрации измеряют вибрацию, оцифровывают измеренный сигнал ДВ, раскладывают в спектр. Далее выделяют спектр полезного сигнала путем вычитания из спектра сигнала ПП спектр сигнала ДВ. По выделенному спектру полезного сигнала вычисляют значение частоты вихреобразования, по которой вычисляют значение скорости потока жидкости, определяющее расход жидкости в текущий момент времени для передачи информации об определенном расходе жидкости потребителю.
Предпочтительно, чтобы измерение и оцифровка вибрации датчиком вибрации ДВ осуществлялись одновременно с оцифровкой сигнала ПП.
Предпочтительно, чтобы после выделения спектра полезного сигнала к нему применяли адаптивную фильтрацию, после чего вычисляли бы значение частоты вихреобразования.
Предпочтительно, чтобы адаптивную фильтрацию осуществляли посредством последовательного применения к выделенному спектру полезного сигнала Окна Хемминга и оценки весовых функций.
Предпочтительно, чтобы перед оцифровкой уровень амплитуды полученного сигнала ПП автоматически регулировали.
Предпочтительно, чтобы после автоматической регулировки уровня сигнала ПП фильтровали его нижние частоты.
Предпочтительно, чтобы вычисленное значение скорости потока жидкости корректировали посредством заранее заданных калибровочных коэффициентов.
Кроме того, указанная цель достигается в вихревом расходомере, выполненном с возможностью подачи питающего напряжения на требующие питания элементы, и содержащем соединенные последовательно первичный преобразователь (далее, ПП), устройство обработки (далее, УО), датчик вибрации (далее, ДВ). При этом УО выполнен с возможностью разложения в спектры оцифрованных сигнала ПП и сигнала ДВ, выделения спектра полезного сигнала из спектра сигнала ПП, применения к упомянутому выделенному спектру полезного сигнала адаптивной фильтрации в виде Окна Хемминга и оценки весовых функций, вычисления значения частоты вихреобразования, вычисления значения скорости потока жидкости в текущий момент времени, автоматической регулировки уровня сигнала ПП, фильтрации его нижних частот.
Предпочтительно, чтобы УО включал контроллер, с которым соединены физический интерфейс, оперативное запоминающее устройство (далее, ОЗУ), с которым, в свою очередь, последовательно соединены первый аналогово-цифровой преобразователь (первый АЦП), соединенный с ПП, второй аналогово-цифровой преобразователь (второй АЦП), соединенный с ДВ.
Предпочтительно, чтобы УО дополнительно включал узел автоматической регулировки уровня сигнала первичного преобразователя (далее, УАРУС ПП), содержащий последовательно соединенные друг с другом усилительный узел (далее, УУ), регулирующий усилитель (далее, РУ), при этом УУ подключен к ПП, РУ соединен с первым АЦП, причем контроллер УО через обратную связь связан с РУ с возможностью регулирования уровня амплитуды сигнала ПП.
Предпочтительно, чтобы УУ содержал усилитель заряда.
Предпочтительно, чтобы УУ содержал, по крайней мере, два усилителя заряда, соединенные параллельно друг с другом, подключенные последовательно с РУ.
Предпочтительно, чтобы УАРУС ПП дополнительно содержал фильтр низких частот (далее, ФНЧ), включенный между РУ и первым АЦП.
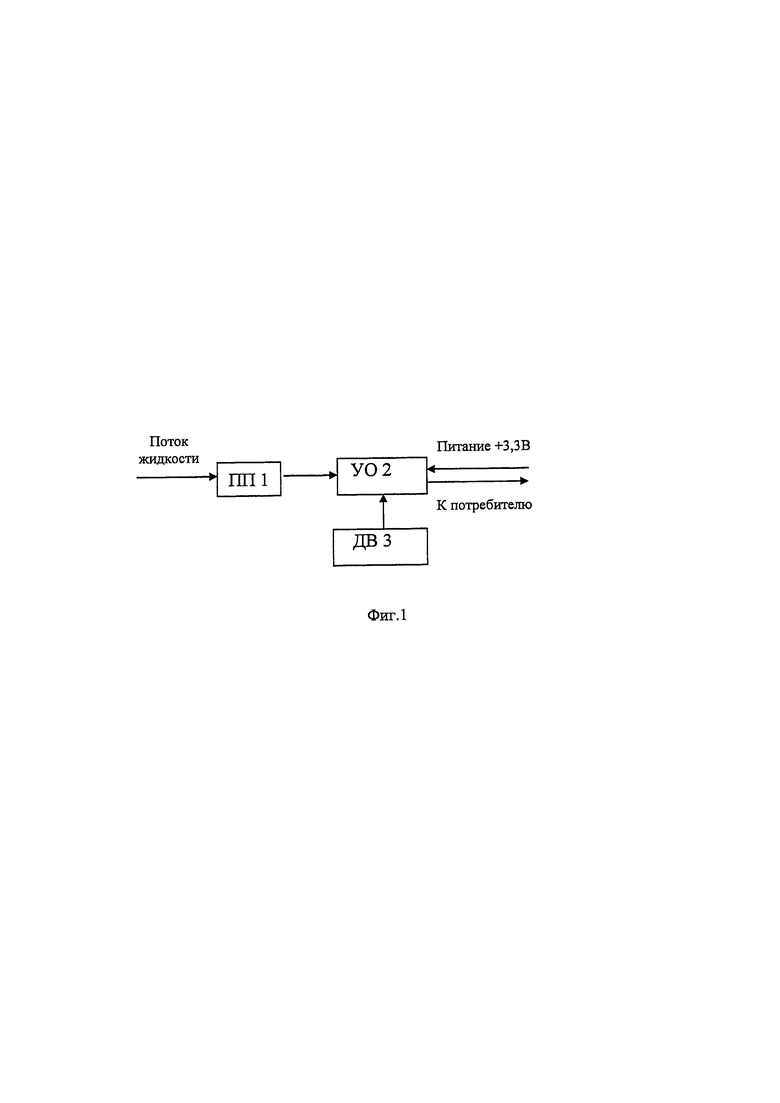
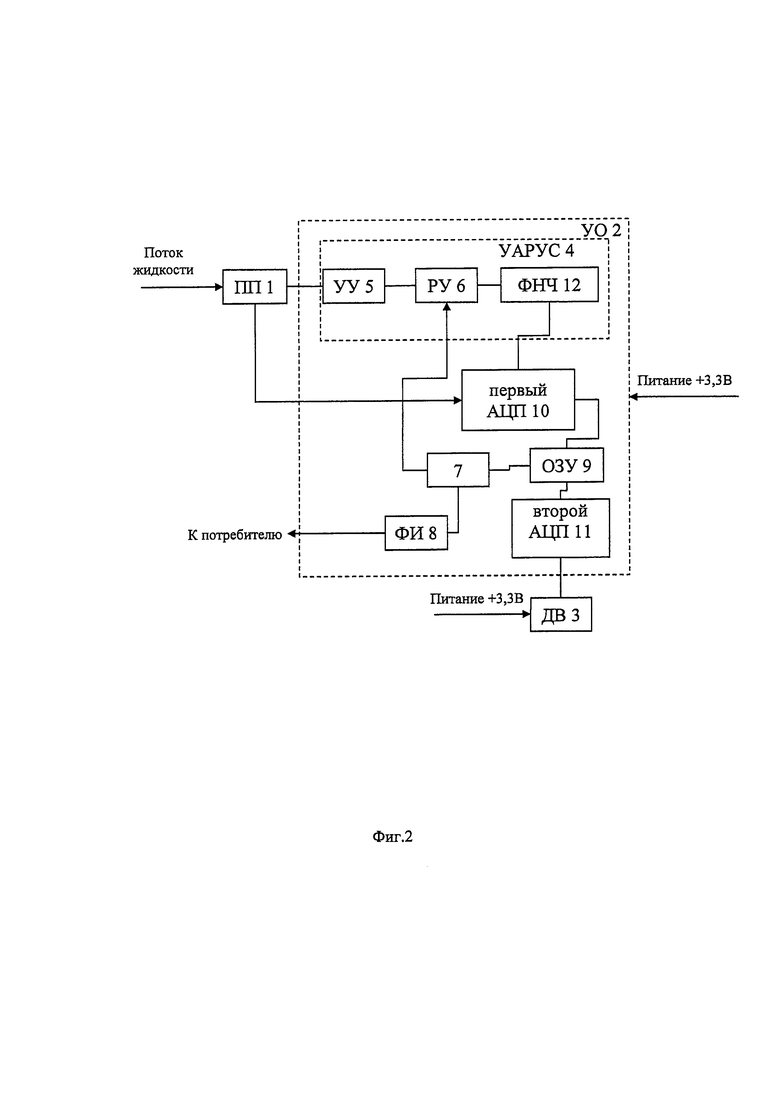
Далее на фиг. 1 структурная схема предлагаемого вихревого расходомера, на фиг. 2 приведен пример предлагаемого вихревого расходомера, который реализует предлагаемый способ определения расхода жидкости в предпочтительном варианте, на фиг. 3 показан спектр сигнала ПП, включающий гармонику вибрации и гармонику вихреобразования, на фиг. 4 показан спектр сигнала ДВ, на фиг. 5 показан спектр полезного сигнала, фиг. 6 показан спектр выделенного полезного сигнала после адаптивной фильтрации.
Вихревой расходомер на фиг. 1 включает последовательно соединенные ПП 1, УО 2, ДВ 3, при этом чувствительный элемент ПП 1 представляет собой пьезоэлемент, улавливающий вихри, образованные за телом обтекания. УО 2 (фиг. 2) содержит УАРУС 4 ПП (показан пунктирной линией), включающий последовательно соединенные друг с другом УУ 5, РУ 6, контроллер 7, физический интерфейс 8, ОЗУ 9, к которому последовательно подключены первый АЦП 10, второй АЦП 11. РУ 6 последовательно соединен первым АЦП 10. Для повышения точности, уменьшения помех между РУ 6 и первым АЦП 10 может быть дополнительно подключен фильтр низких частот (ФНЧ)12. Контроллер 7 охвачен обратной связью с РУ 6, обеспечивающей возможность автоматической регулировки коэффициентов усиления для согласования диапазонов выходного напряжения ПП 1 и входного напряжения первого АЦП 10. ДВ 3 соединен через второй АЦП 11 с контроллером 7.
На фиг. 3 показан спектр сигнала ПП, в котором гармоники смешаны, а также в отдельности гармоника вибрации (вибрационная шумовая составляющая) и гармоника вихреобразования (составляющая полезного сигнала). На фигуре 4 показан спектр сигнала ДВ, в котором выделена максимальная гармоника, характеризующая интенсивность вибрации. На фигуре 5 показан спектр полезного сигнала. В частности, спектр полезного сигнала может быть получен программным исключением вибрационной гармоники из спектра сигнала ПП. Для более точного выделения гармоники, отвечающей за скорость потока жидкости, а также для улучшения соотношения сигнал-шум к выделенному спектру полезного сигнала применяют адаптивную фильтрация в виде последующих друг за другом окна Хемминга и оценки весовых функций. Результат применения адаптивной фильтрации представлен на фигуре 6 и отражает увеличенное соотношение сигнал-шум, благодаря чему появляется возможность более точно получить основную частоту вихреобразования (в спектре полезного сигнала), по которой определяют скорость потока (расход) жидкости.
В качестве ПП 1 может быть использован, например, датчик изгибающего момента пьезоэлектрический 108м-23-10мм ТУ4213-108-24172160-08, располагаемый за телом обтекания в проточной части вихревого расходомера, установленного в скважине в разрыв труб НКТ. Чувствительный элемент ПП 1 улавливает вихри, образовывающиеся за телом обтекания и преобразует их в аналоговый сигнал, характеризующий интенсивность вихреобразования и, как следствие, скорость потока жидкости. Этот сигнал является комплексным и включает в себя полезную частотную составляющую, характеризующую скорость потока жидкости и шумовую частотную составляющую, характеризующую интенсивность вибрации в текущий момент времени. ПП 1 соединен УО 2.
УО 2 осуществляет следующие основные функций:
- оцифровку сигнала ПП 1 и сигнала ДВ 3 и их сохранение в ОЗУ 9;
- автоматическую регулировку уровня амплитуды сигнала ПП 1 под соответствующий диапазон первого АЦП 10;
- разложение сигнала ПП 1 и сигнала ДВ 3 в спектры;
- выделение спектра полезного сигнала (очищен от вибраций) (путем вычитания из спектра сигнала ПП 1 спектр сигнала ДВ 3;
- применение адаптивной фильтрации к спектру выделенного полезного сигнала посредством последовательного применения Окна Хемминга и оценки весовых функций (позволяет придать полезной гармонической составляющей вихреобразования больший вес в результирующем значении по сравнению с шумовой составляющей);
- вычисления значения частоты вихреобразования,
- вычисления значения скорости потока жидкости;
- вычисления значения частоты вибрации и пр.
В данной реализации УО 2 включает УАРУС 4 ПП, контроллер 7 (в частности, микроконтроллер), с которым соединены физический интерфейс 8, ОЗУ 9, с которым в свою очередь последовательно соединены первый АЦП 10, предназначенный для преобразования в цифровой вид сигнала ПП 1 и второй АЦП 11, предназначенный для преобразования в цифровой вид измеренного сигнала ДВ 3.
УАРУС 4 ПП предназначен для предварительной обработки сигнала ПП 1 под соответствие сигнала ПП 1 диапазону первого АЦП 10 и включает последовательно соединенные УУ 5, РУ 6. Если принятый сигнал ПП 1 сразу удовлетворяет диапазону первого АЦП 10, сигнал ПП 1 может быть подан сразу на первый АЦП 10, минуя УАРУС 4 ПП, как показано на фиг. 2.
УУ 5 предназначен для предварительного усиления сигнала ПП 1 и включает, по крайней мере, один усилитель заряда, в частности, интегратор тока (построенный на основе метода интегрирования тока и выполненный на операционном усилителе), в частности, выполненный на микросхеме TL082, фирма Texas Instruments. В частности, для фильтрации симфазных помех, образующихся в результате работы электронных устройств вихревого расходомера, может быть использован двухканальный ПП 1 (на выходе ПП 1 имеем прямой и инверсный сигналы). В этом случае УУ 5 может включать первый усилитель заряда, обеспечивающий усиление прямого сигнала ПП 1, параллельно которому подключают второй усилитель заряда, обеспечивающий усиление инверсного сигнала ПП 1. С выхода УУ 5 усиленные прямой сигнал и инверсный сигнал поступают на вход РУ 6, где за счет их разницы на его выходе формируется один (общий) усиленный сигнал ПП 1, поступающий через первый АЦП 10 в ОЗУ 9, где он сохраняется.
В качестве РУ 6 может быть использован, например, широкоизвестный измерительный усилитель (инструментальный), выполненный на трех операционных усилителях, в частности, выполненный на микросхеме TL082, производитель Texas Instruments. РУ 6 соединен через первый АЦП 10 с контроллером 7, охваченным с ним обратной связью с возможностью автоматического регулирования уровня амплитуды сигнала ПП 1 посредством коэффициентов усиления в случае несоответствия уровня амплитуды оцифрованного сигнала ПП 1 заданным значениям диапазона уровня амплитуды сигнала (хранящимся в ОЗУ 9). Таким образом, обратная связь позволяет автоматически адаптировать уровень амплитуды сигнала ПП 1 под требуемый аппаратной частью диапазон значений амплитуд с максимально возможной дискретностью, что дает возможность получить указанный сигнал в цифровом виде с высокой точностью.
Физический интерфейс 8 соединен с контроллером 7 и предназначен для передачи данных по каналам связи на внешние устройства потребителя. По физическому интерфейсу 8 передают следующие данные: идентификатор устройства, номер устройства, версия программного обеспечения, статус выполнения команд, накопленный объем, частота вибрации, коэффициенты усиления для регулирования амплитуды РУ 6, температура, время работы и адрес вихревого расходомера, скорость физического интерфейса 8, минимальная и максимальная измеряемые частоты сигнала. Передача данных, в частности, может быть осуществлена, например, посредством геофизического кабеля, подключаемого к физическому интерфейсу 8 на диспетчерский пункт и/или станцию управления и др. В качестве физического интерфейса 8 в данной реализации использован, в частности, цифровой физический интерфейс UART. В других вариантах исполнения в качестве физического интерфейса 8 может быть использован любой другой известный интерфейс, в частности CAN, RS-232, RS-485, USB.
ОЗУ 9 служит для хранения оцифрованных сигнала ПП 1 и сигнала ДВ 3, хранения их спектров, характеристик, например, таких каких: амплитуда, частота, величина постоянной составляющей, хранения сигналов ПП 1 и ДВ 3, хранения вычисленных данных, хранения параметров работы расходомера в текущий момент времени, промежуточных вычисленных данных, не требующих длительного хранения, но необходимых для вычисления на следующих этапах вычисления, хранения заданных допустимых значений диапазонов уровня амплитуды сигнала.
В данном варианте исполнения ОЗУ 9, первый АЦП 10, второй АЦП 11 выполнены в составе контроллера 7 и могут быть реализованы, в частности, на микросхеме ATMEGA168-20AU, фирмы MICROCHIP. В других реализациях, второй АЦП 11 может быть выполнен, например, в составе ДВ 3, в частности, ДВ марки AIS1120SXTR, изготовитель STM. Кроме того, первый АЦП 10, второй АЦП 11, ОЗУ 9 могут быть выполнены в виде отдельных микросхем или устройств. В этом случае, в качестве первого АЦП 10 и второго АЦП 11 могут быть использованы любые широко известные аналогово-цифровые преобразователи, например марки MCP3201-CI/P, производитель Microchip, а в качестве ОЗУ - любой широкоизвестный ОЗУ, в частности ОЗУ марки AT25DF041A-SSH-В, производитель Atmel.
Для подавления спектральных компонент усиленный сигнал ПП 1 с выхода РУ 6, подаваемый на вход первого АЦП 10, пропускают через фильтр ФНЧ 12, чтобы частота усиленного сигнала ПП 1 превышала половину частоты дискретизации первого АЦП 10. Это позволяет исключить наложение спектров. В качестве ФНЧ 12 может быть использован широко известный anti-aliasing (антиалиасинговый) фильтр, в частности RC-фильтр.
ДВ 3 предназначен для непосредственного измерения вибрации. Присутствующими в сигнале ДВ 3 прочими шумовыми составляющими (например, помехами, наводками и пр.) пренебрегают, не учитывая их в расчете, вследствие того, что они имеет ничтожно малую амплитуду по сравнению с полезным сигналом. ДВ 3 может быть выполнен, в частности, на микросхеме ADIS 16006, производитель Analog Devices. Кроме того, в качестве ДВ 3 может быть использован, в частности, датчик вибрации, выполненный с возможностью осуществления функции оцифровки измеренного сигнала, например, датчик вибрации марки AIS1120SXTR, производитель STM. В этом случае на выходе ДВ 3 получают оцифрованный сигнал, поступающий в контроллер 7, минуя второй АЦП 11.
Вихревой расходомер выполнен с возможностью подачи питающего напряжения на требующие питания элементы. Питание вихревого расходомера осуществляется от внешнего источника «от +20 В до +60 В». На УАРУС 4 ПП подают два стабилизированных напряжения питания «+3.3 В», при этом первое стабилизированное напряжение питания по шине питания (не показана) поступает на УУ 5, РУ 6, ФНЧ 12, а второе - по шине питания (не показана) поступает на УО 2 и ДВ 3, а также на первый АЦП 10, ОЗУ 9, контроллер 7, физический цифровой интерфейс 8, второй АЦП 11.
Осуществление способа определения расхода жидкости будет показано на работе вихревого расходомера, установленного в скважине в непосредственной близости от погружного электродвигателя (ПЭД), например, на выкиде насоса. Расходомер работает следующим образом.
Чувствительным элементом ПП 1 улавливают вихри, образовывающиеся за телом обтекания, а также вибрацию, воздействующую на расходомер. При одноканальном исполнении ПП 1 с его выхода в текущий момент времени получают сигнал, например, со следующими характеристиками: сигнал, в котором преобладают две частоты - 21 Гц и 19 Гц, амплитудой- 20 мВ, среднеквадратичным значением сигнала - 1600 мВ. Указанный сигнал поступает в УАРУС 4 ПП, где его амплитуда усиливается до значения 1300 мВ (на выходе УАРУС 4 ПП).
При двухканальном исполнении ПП 1 (исключает синфазные помехи) с выхода ПП 1 получают прямой и инверсный сигналы (отличаются между собой по фазе), каждый из которых имеет преобладающие частоты 21 Гц и 19 Гц, амплитудой 20 мВ, среднеквадратичным значением- 1600 мВ. Указанные сигналы поступают в УАРУС 4 ПП, где их амплитуда усиливается до значения 1300 мВ (остальные параметры не изменяются). При этом амплитуда прямого сигнала ПП 1 усиливается первым усилителем заряда, а амплитуда инверсного сигнала- вторым усилителем заряда УУ 5, подключенным параллельно первому усилителю заряда. Усиленные прямой сигнал ПП 1 и инверсный сигнал ПП 1 поступают на вход РУ 6, где за счет их разницы на его выходе формируется один (общий) усиленный сигнал ПП 1, в частности с преобладающими частотами - 21 Гц и 19 Гц, амплитудой - 1300 мВ, среднеквадратичным значением - 1600 мВ. Таким образом устраняют синфазную помеху.
С выхода УАРУС 4 ПП усиленный сигнал ПП 1 оцифровывают посредством первого АЦП 10, при этом в данном варианте первый АЦП 10 имеет следующие параметры: разрядность 10 бит, диапазон входных напряжений от 0 до 3300 мВ, частота дискретизации 1200 Гц, длительность оцифровки сигнала 430 мсек. На выходе первого АЦП 10 получают оцифрованный сигнал ПП 1 с количеством оцифрованных значений сигнала равным 1536 сэмплов. Усреднением каждых N соседних оцифрованных значений, в нашем случае N=3 соседних значений сигнала, получают оцифрованный сигнал ПП 1 с количеством оцифрованных значений сигнала равным 512 сэмплов, тем самым повышают его точность. При этом осуществляем передискретизацию первого АЦП 10 путем деления частоты дискретизации на N соседних оцифрованных значений сигнала. После передискретизации АЦП получаем частоту дискретизации АЦП равной 400 Гц.
После чего оцифрованный сигнал ПП 1 поступает в ОЗУ 9, где он сохраняется. Для исключения наложения спектров перед оцифровкой усиленный сигнал ПП 1 фильтруют посредством ФНЧ 12, в частности RC-цепочкой.
По запросу контроллера 7 сохраненный в ОЗУ 9 сигнал ПП 1 поступает в контроллер 7, где его уровень сравнивается (постоянно в каждый момент времени) с заранее заданными допустимыми диапазонами значений сигнала, при которых уровень сигнала будет находиться в пределах заданного диапазона входных напряжений первого АЦП 10. В частности, в данном варианте максимальное значение уровня сигнала ПП 1 должно находится в диапазоне от 2200 до 2750 мВ, минимальное значение уровня сигнала - в диапазоне от 550 до 1100 мВ.
Максимальное значение уровня сигнала ПП 1 можно вычислить как сумму среднеквадратичного значения сигнала и его амплитуды. Минимальное значение уровня сигнала ПП 1 можно вычислить как разность среднеквадратичного значения сигнала и его амплитуды. В данном случае, с учетом того, что текущая амплитуда сигнала ПП 1 равна 1300 мВ, а среднеквадратичное значение - 1600 мВ, минимальное значение уровня сигнала ПП 1 составит 300 мВ, что ниже, чем нижняя граница предела заданного диапазона, а максимальное значение уровня сигнала ПП 1 составит 2900 мВ, что превышает верхнюю границу предела заданного диапазона (т.е. имеет место несоответствие, которое может привести к некорректной оцифровке сигнала). В этом случае (при не соответствии) принимается решение о необходимости корректировки уровня сигнала ПП 1 до соответствия заданным допустимым диапазонам значений сигнала. Контроллер 7 посредством обратной связи РУ 6 автоматически регулирует уровень напряжения сигнала ПП 1 в текущий момент времени с помощью коэффициентов усиления, (ранее сохраненный сигнал ПП 1 при этом отбрасывается). Процесс повторяют вплоть до тех пор, пока уровень напряжения сигнала ПП 1 не установится в пределах заданных значений диапазона. В данном примере уровень амплитуды регулируют с помощью коэффициента усиления 0,8. В результате на выходе УАРУС 4 ПП получают сигнал с максимальным значением сигнала равным 2320 мВ. Это значение соответствует требуемому диапазону. Тем самым ослабляются наведенные помехи (шум) по отношению к полезному сигналу. Затем поступивший оптимизированный сигнал оцифровывается с помощью первого АЦП 10, и затем сохраняется в ОЗУ 9. Цикл повторяется до тех пор, пока вихревой расходомер включен и находится в режиме измерения.
Посредством ДВ 3 измеряют вибрацию. Полученный сигнал ДВ 3 оцифровывают либо посредством второго АЦП 11 либо посредством ДВ 3 с функцией оцифровки, раскладывают в спектр и сохраняют в ОЗУ 9. Получение сигнала ДВ 3 может быть осуществлено как одновременно с приемом и оцифровкой сигнала ПП 1 (при условии, что значение величины вибрации постоянно изменяется во времени), так и отдельно от него в любой момент времени (при условии, что величина вибрации иметь неизменное/постоянное/статичное значение в любой момент времени). В данном примере измеренный сигнал ДВ имеет следующие характеристики: частота сигнала ДВ - 21 Гц, амплитуда - 500 мВ, среднеквадратичное значение - 1500 мВ.
При параметрах второго АЦП И, в частности, разрядностью 10 бит, диапазон входных напряжений от 0 до 3300 мВ, частотой дискретизации - 1200 Гц, длительностью оцифровки сигнала 430 мсек., после оцифровки на выходе второго АЦП 11 получим оцифрованный сигнал ДВ с количеством оцифрованных значений сигнала равным 1536 сэмплов. Усреднением каждых N соседних оцифрованных значений сигнала, в нашем случае N=3 соседних значений, повышаем точность и получаем оцифрованный сигнал ДВ 3 с количеством оцифрованных значений сигнала равным 512 сэмплов, который затем сохраняем в ОЗУ 9. При этом осуществляем передискретизацию (понижают частоту дискретизации) второго АЦП 11 путем деления частоты дискретизации на N соседних оцифрованных значений сигнала. В результате получают частоту дискретизации второго АЦП 11 равную 400 Гц.
Сохраненные в ОЗУ 9 сигнал ПП 1 и сигнал ДВ 3 считывают контроллером 7 (по его запросу) и раскладывают в спектры известными способами, например, с помощью быстрого преобразования Фурье (чтобы оценить наличие частотных составляющих в. сигнале, характеризующих наличие определенных частот в предлагаемых сигналах). В частности, оцифрованный сигнал ПП 1 раскладывают в спектр (фиг. 3), содержащий гармоники в количестве, зависящем от частоты дискретизации соответствующего АЦП. Например, в нашем примере при частоте дискретизации первого АЦП 10 равной 1200 Гц, спектр сигнала ПП 1 будет содержать 256 гармоник.
Аналогичным способом оцифрованный сигнал ДВ 3 раскладывают в спектр, содержащий от 1 до N гармоник, в частности, с помощью Быстрого преобразования Фурье. Полученный спектр представлен на фиг. 4 и в рассматриваемом примере, при частоте дискретизации второго АЦП 11 равной 1200 Гц, спектр имеет 256 гармоники. Сравнивают гармоники спектра сигнала ДВ 3 между собой, выделяют наибольшую по мощности гармонику, соответствующую преобладающей частоте в сигнале ДВ 3 (т.е. частоте вибрации, которую принимают (считают) равной частотной шумовой составляющей сигнала ПП 1). Определяют ее порядковый номер для дальнейшего вычисления частоты вибрации и исключения соответствующей частоты из спектра с ПП 1. В данном примере выделена наиболее мощная гармоника с порядковым номером 27.
Выделяют спектр полезного сигнала путем вычитания наибольшей по мощности гармоники спектра сигнала ДВ 3 из спектра сигнала ПП 1 (при этом две одинаковые гармоники (вибрация) гасятся и, остается очищенный от вибрации спектр полезного сигнала (фиг. 5). Затем к выделенному спектру полезного сигнала (сигнал, очищенный от вибраций) применяют адаптивную фильтрацию, а именно, посредством последовательного использования окна Хэмминга и оценки весовой функции. При наличии шумовых составляющих, на данном этапе улучшится соотношение сигнал\шум, то есть гармоники, отвечающие за шум, станут менее мощными в сравнении с частотой вихреобразования. В результате получают спектр полезного сигнала (фиг. 6) с улучшенным соотношением частота-шум, тем самым повышается точность нахождения полезной частоты. Сравнивают гармоники выделенного спектра полезного сигнала между собой, определяют наибольшую по мощности гармонику (в данном случае максимальная по мощности гармоника имеет порядковый номер 24), по которой находят текущее значение частоты вихреобразования.
Текущее значение частоты вихреобразования может быть вычислено, например, по формуле:
Fтек=Xi*(H/N),
где Fтек - Текущее значение частоты вихреобразования, Гц
Xi - порядковый номер бина спектра, при этом i принимает значение от 1 до N, где N-соответствует максимальному порядковому номеру гармоники (в нашем случае 256), которое определяется параметрами оцифровки сигнала.
Н - Частота дискретизации АЦП (Гц);
N - Количество точек сигнала (отсчет сигнала - численное значение напряжения сигнала в определенный момент времени).
Fтек=24*(400/512)=18.75 Гц
После чего определяют скорость потока жидкости (объем за текущий момент времени). В частности, скорость потока жидкости в текущий момент времени может быть определена по формуле:
Vтек= Fтек*D/Sh, где
Vтек - скорость потока жидкости в текущий момент времени (л/час);
Fтек - текущая частота вихреобразования (Гц);
D - ширина тела обтекания (мм);
Sh - число Струхаля.
При ширине тела обтекания равном 7 мм, и известным значением числа Струкаля равным 0,295 преобразовываем частоту вихреобразования в скорость потока жидкости следующим образом:
Vтек=18.75 Гц * 7 мм/0.295=444.9 л/час
Далее вычисленная скорость потока жидкости в текущий момент времени корректируется с помощью коррелирующего коэффициента (заранее заданного, учитывающего отклонение от эталона, хранится в ОЗУ 9), тем самым сглаживается погрешность в техническом исполнении модели устройства.
444.9 л/ч * 1.005=447.139 л/час
Вычисленный расход жидкости передается через интерфейс 8 потребителю.
Способ и устройство обеспечивают повышение точности определения частоты вихреобразования, особенно при сильном вибрационном воздействии за счет: повышения вибрационной устойчивости вихревого расходомера, возможности исключения ложного измерения расхода и увеличения минимального измеряемого уровня расхода в условиях воздействия на расходомер динамически изменяющихся вибрационных нагрузок - повышение чувствительности расходомера с соотношения сигнал/шум (расход/вибрация) с 6 до -6 дБ, вызванных работой двигателей, насосов, клапанов, увеличения рабочего диапазона работы расходомера со значения 1:10 до 1:20 в сторону меньших значений расхода.
Понижение частоты дискретизации сигнала (программным способом) путем усреднения нескольких ближайших точек захвата позволяет повысить точность оцифровки сигнала и уменьшить погрешность дискретизации.
Таким образом, несмотря на то, что заявленное в качестве изобретения техническое решение показано и описано на примере его конкретной реализации, среднему специалисту в данной области должно быть понятно, что различные изменения по форме и содержанию могу быть сделаны без отступления от сущности и объема изобретения, определенных приведенной в заявке формуле изобретения.


Изобретение относится к измерительной технике, а именно к способам и средствам, предназначенным для измерения расхода жидкостей, и может быть использовано в различных отраслях народного хозяйства для целей контроля, регулирования и учета потоков среды. В частности, изобретение может быть использовано для определения расхода жидкости в скважине вихревым расходомером в условиях воздействия на него низкочастотных вибрационных нагрузок. Способ определения расхода жидкости заключается в том, что первичным преобразователем непрерывно принимают сигнал, включающий полезную частотную составляющую, характеризующую скорость потока жидкости, и шумовую частотную составляющую, характеризующую интенсивность вибрации. Полученный в текущий момент времени сигнал ПП оцифровывают и раскладывают в спектр. Посредством датчика вибрации измеряют вибрацию, оцифровывают измеренный сигнал ДВ, раскладывают в спектр. Далее выделяют спектр полезного сигнала путем вычитания из спектра сигнала ПП спектр сигнала ДВ. По выделенному спектру полезного сигнала вычисляют значение частоты вихреобразования, по которой вычисляют значение скорости потока жидкости, определяющее расход жидкости в текущий момент времени для передачи информации об определенном расходе жидкости потребителю. Вихревой расходомер, выполненный с возможностью подачи питающего напряжения на требующие питания элементы, и содержащем соединенные последовательно первичный преобразователь (далее, ПП), устройство обработки (далее, УО), датчик вибрации (далее, ДВ). При этом УО выполнен с возможностью разложения в спектры оцифрованных сигнала ПП и сигнала ДВ, выделения спектра полезного сигнала из спектра сигнала ПП, применения к упомянутому выделенному спектру полезного сигнала адаптивной фильтрации в виде Окна Хемминга и оценки весовых функций, вычисления значения частоты вихреобразования, вычисления значения скорости потока жидкости в текущий момент времени, автоматической регулировки уровня сигнала ПП, фильтрации его нижних частот. Технический результат - повышение точности определения частоты вихреобразования, особенно при сильном вибрационном воздействии за счет: повышения вибрационной устойчивости вихревого расходомера, возможности исключения ложного измерения расхода и увеличения минимального измеряемого уровня расхода в условиях воздействия на расходомер динамически изменяющихся вибрационных нагрузок. 2 н. и 10 з.п. ф-лы, 6 ил.
1. Способ определения расхода жидкости, характеризующийся тем, что с первичного преобразователя (ПП) получают сигнал, включающий полезную частотную составляющую, характеризующую скорость потока жидкости и шумовую частотную составляющую, характеризующую вибрацию в текущий момент времени, полученный сигнал ПП оцифровывают, раскладывают в спектр, при этом посредством датчика вибрации (ДВ) измеряют вибрацию в текущий момент времени, измеренный сигнал ДВ оцифровывают и раскладывают в спектр, выделяют спектр полезного сигнала путем вычитания из спектра сигнала ПП спектр сигнала ДВ, на основании выделенного спектра полезного сигнала вычисляют значение частоты вихреобразования, по которой определяют расход жидкости в текущий момент времени.
2. Способ по п. 1, отличающийся тем, что к выделенному спектру полезного сигнала применяют адаптивную фильтрацию, при этом значение частоты вихреобразования вычисляют после ее применения.
3. Способ по п. 2, отличающийся тем, что упомянутую адаптивную фильтрацию осуществляют посредством последовательного применения Окна Хемминга и оценки весовых функций.
4. Способ по п. 1, отличающийся тем, что перед оцифровкой уровень полученного сигнала ПП автоматически регулируют.
5. Способ по п. 4, отличающийся тем, что после автоматической регулировки уровня сигнала ПП осуществляют фильтрацию его нижних частот.
6. Способ по любому из предшествующих пунктов, отличающийся тем, что сигнал ДВ оцифровывают одновременно с оцифровыванием сигнала ПП.
7. Вихревой расходомер, реализующий способ по п. 1, выполненный с возможностью подачи питающего напряжения на требующие питания элементы и содержащий соединенные последовательно первичный преобразователь (ПП), узел автоматической регулировки уровня сигнала ПП (УАРУС ПП), устройство обработки (УО), датчик вибрации (ДВ), при этом УО выполнен с возможностью разложения в спектры оцифрованных сигнала ПП и измеренного сигнала ДВ, выделения спектра полезного сигнала, применения к этому выделенному спектру адаптивной фильтрации посредством Окна Хемминга и оценки весовых функций.
8. Вихревой расходомер по п. 7, отличающийся тем, что УО содержит контроллер, физический интерфейс, ОЗУ, с которым последовательно соединены первый аналогово-цифровой преобразователь (первый АЦП), второй аналогово-цифровой преобразователь (второй АЦП), причем ДВ соединен последовательно через второй АЦП с контроллером.
9. Вихревой расходомер по п. 1, отличающийся тем, что УАРУС ПП включает последовательно соединенные друг с другом усилительный узел (УУ), регулирующий усилитель (РУ), с которым связан через обратную связь контроллер УО с возможностью регулирования уровня амплитуды сигнала ПП, при этом РУ, в свою очередь, соединен с первым АЦП УО.
10. Вихревой расходомер по п. 9, отличающийся тем, что УУ содержит усилитель заряда.
11. Вихревой расходомер по п. 9, отличающийся тем, что УУ содержит, по крайней мере, два усилителя заряда, соединенные параллельно друг с другом, подключенные последовательно с РУ.
12. Вихревой расходомер по п. 9, отличающийся тем, что УАРУС ПП дополнительно содержит фильтр низких частот (ФНЧ), включенный между РУ и первым АЦП.
| УНИВЕРСАЛЬНЫЙ ВИХРЕВОЙ РАСХОДОМЕР | 2000 |
|
RU2192623C2 |
| CN 105067048 B, 13.02.2018 | |||
| US 20120192657 A1, 02.08.2012 | |||
| CN 101701834 B, 23.01.2013. | |||

