Область техники, к которой относится изобретение
Настоящее раскрытие относится, в общем, к беспроводной связи и, в частности, к способу, сетевому узлу и беспроводному устройству для планирования опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции (DM-RS).
Уровень техники
Ожидается, что на физическом уровне нового радио (New Radio, NR) (системы мобильной радиосвязи пятого поколения (5G) проекта партнерства третьего поколения (3GPP)) будет обрабатываться огромное количество различных сценариев передачи при работе в диапазоне частот от менее 1 ГГц до 100 ГГц. Несущие частоты выше 6 ГГц не поддерживаются долгосрочным развитием (LTE), поэтому NR требует новой и гибкой структуры для физического уровня, которая предусматривает хорошую производительность в более широком диапазоне частот, чем физический уровень LTE.
Подобно LTE, NR будет использовать формы сигналов на основе мультиплексирования с ортогональным частотным разделением каналов (OFDM) с опорными сигналами и каналами физического уровня, отображенными на сетке частотно-временных ресурсов. NR имеет сверхрациональную структуру, которая сводит к минимуму постоянные передачи, тем самым повышая энергоэффективность сети и обеспечивая прямую совместимость. В отличие от организации, используемой в LTE, опорные сигналы в NR передаются только в случае необходимости. Опорные сигналы демодуляции (DM-RS) и опорные сигналы отслеживания фазы (PT-RS) являются, среди прочих, двумя вариантами опорных сигналов.
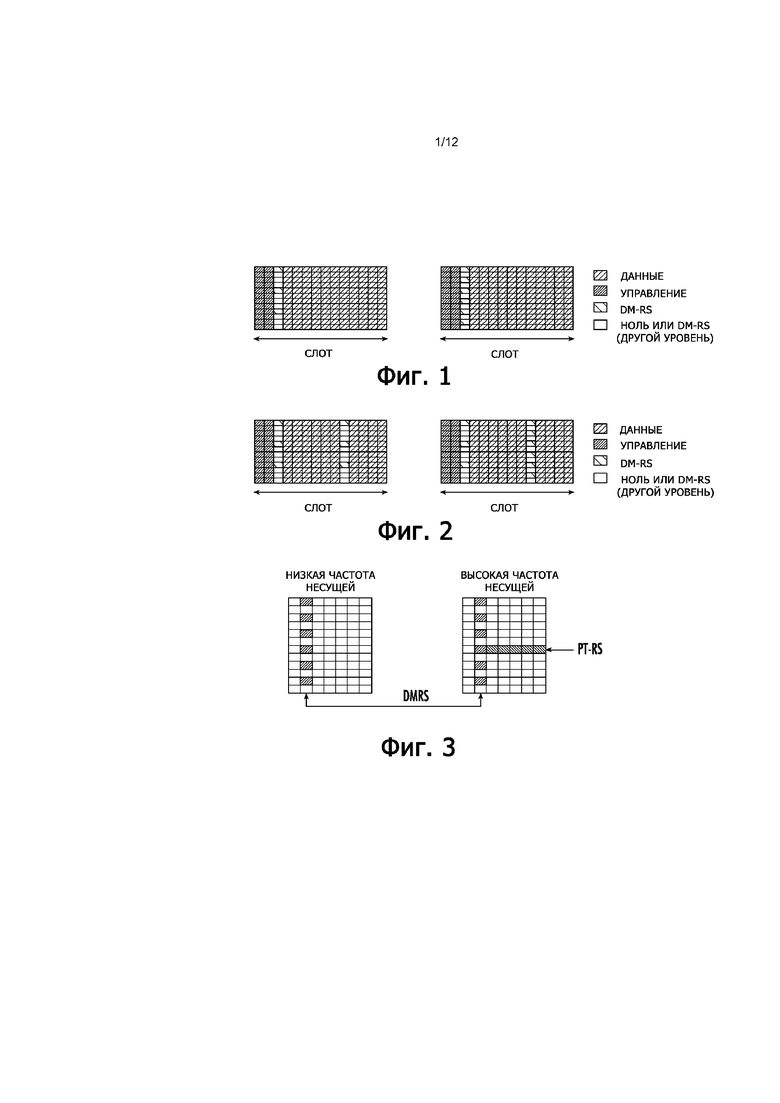
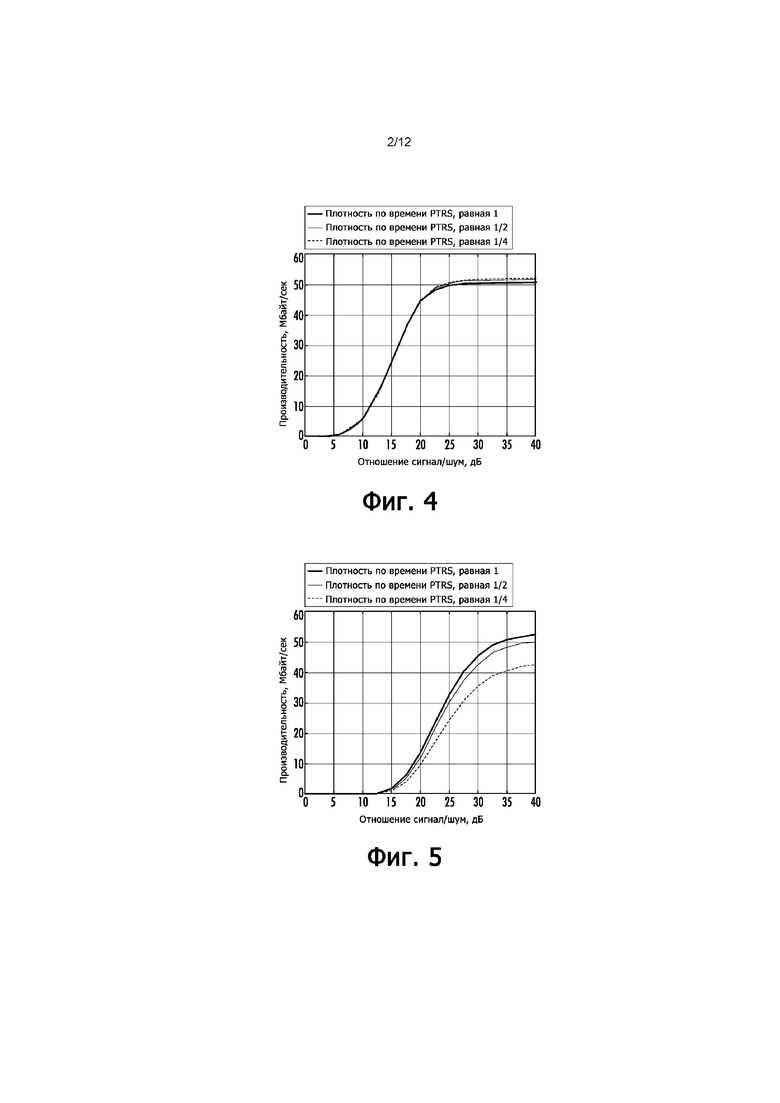
DM-RS используется для оценки радиоканала для демодуляции. DM-RS является характерным сигналом для беспроводного устройства, может переноситься лучом формированием диаграммы направленности, может быть ограничен в запланированном ресурсе и передаваться только при необходимости как в нисходящей линии связи (DL), то есть из базовой станции в беспроводное устройство, так и в восходящей линии связи (UL), то есть из беспроводного устройства в базовую станцию. Для поддержки многоуровневой передачи с многоканальными входами - многоканальными выходами (MIMO) можно запланировать несколько ортогональных портов DM-RS, по одному для каждого уровня. Ортогональность достигается путем мультиплексирования с частотным разделением каналов (FDM) (гребенчатая структура), мультиплексирования с временным разделением каналов (TDM) и мультиплексирования с кодовым разделением каналов CDM) (с циклическим сдвигом корневой последовательности или ортогональных кодов покрытия). Основной шаблон DM-RS имеет фронтальную загрузку, так как структура DM-RS учитывает требование к раннему декодированию, для поддержки приложений с низкой задержкой. Для низкоскоростных сценариев DM-RS использует низкую плотность во временной области. Однако для высокоскоростных сценариев плотность во времени DM-RS увеличивается, чтобы отслеживать быстрые изменения в радиоканале. На фиг.1 и 2 показано потенциальное отображение ресурсов DM-RS на частотно-временной сетке для сценариев низкого доплеровского сдвига и высокого доплеровского сдвига, соответственно, в слоте передачи.
Другой проблемой, с которой сталкивается NR, являются радиочастотные (РЧ) искажения при работе беспроводных систем в миллиметровом (мм) диапазоне длин волн, в частности, влияние фазового шума, создаваемого гетеродинами. Ухудшение, вызванное фазовым шумом, увеличивается с увеличением несущей частоты, поэтому физический уровень NR, работающего на частотах в миллиметровом диапазоне длин волн, должен быть устойчивым к фазовому шуму для достижения хорошей производительности. Следовательно, существует потребность в новом опорном сигнале, который называется опорным сигналом отслеживания фазы (PT-RS). Такой сигнал можно использовать как для уменьшения общей фазовой ошибки, вызванной фазовым шумом (CPE), так и для помех между несущими (ICI), вызванных потерей ортогональности между поднесущими.
PT-RS может быть необходим как в восходящей линии связи, так и в нисходящей линии связи. Предусматривается, что этот сигнал можно будет использовать как для точной синхронизации несущей частоты, так и для компенсации фазового шума. Предполагается, что этот сигнал будет присутствовать и будет необходим только на высоких несущих частотах, в то время как другие свойства DM-RS могут оставаться отчасти неизменными. Пример добавления PT-RS на высоких несущих частотах показан на фиг. 3.
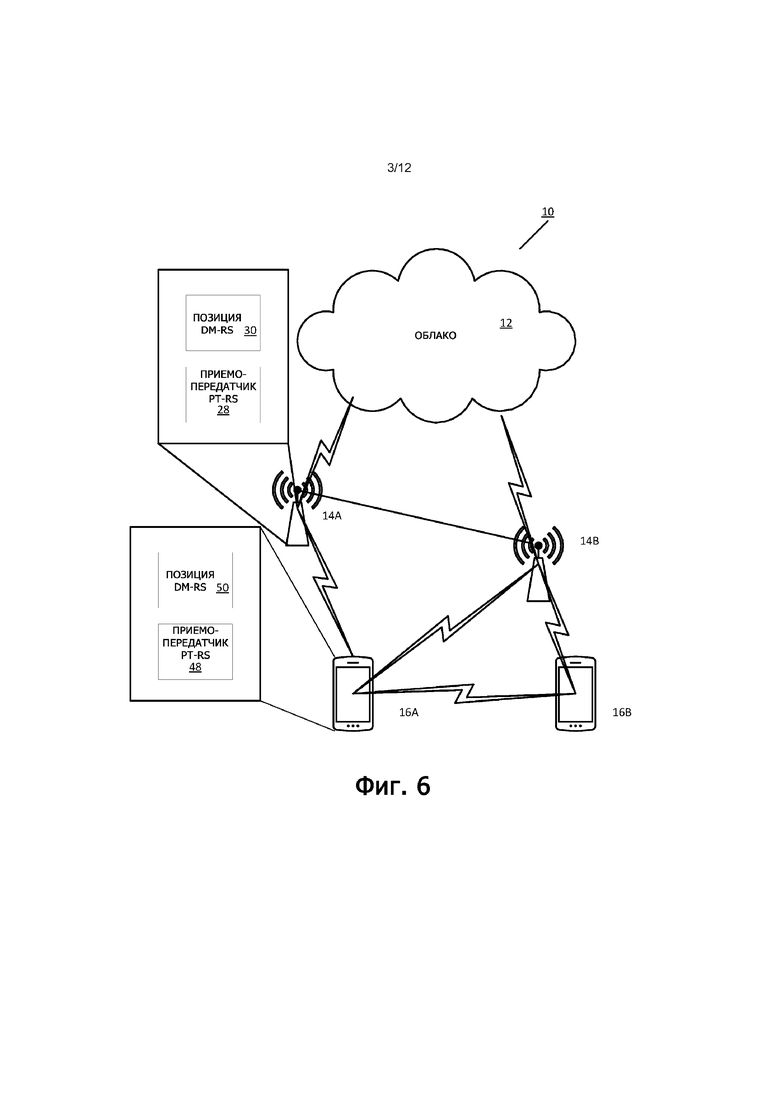
Различные схемы модуляции и кодирования (MCS) обеспечивают разную устойчивость к воздействию фазового шума, как показано на фиг.4 и 5. Поэтому плотность во времени PT-RS для конкретного беспроводного устройства (WD) может быть сконфигурирована в соответствии с запланированной MCS.
Проблемы существующего решения можно обобщить следующим образом:
- PT-RS - это новый опорный сигнал, введенный в NR, который в определенных сценариях может сосуществовать с DM-RS;
- каждый тип опорного сигнала должен резервировать свой собственный ресурс в частотно-временной сетке;
- в решениях предшествующего уровня техники предлагается совместный дизайн для DM-RS и PT-RS, но дизайн ограничен случаем, когда в слоте запланирован только один экземпляр DM-RS; и
- может происходить "загрязнение" пилот-сигнала, поэтому необходимо контролировать непроизводительные потери общих ресурсов, используемых опорными сигналами.
Раскрытие сущности изобретения
Предложенное решение для совместной структуры DM-RS и PT-RS может быть основано на условиях, при которых отображение PT-RS во временной области может зависеть по меньшей мере от следующего:
- позиция DM-RS с фронтальной загрузкой в слоте для антенного порта, в котором отображается PT-RS;
- требуемая плотность во времени во временной области для PT-RS;
- позиция первого OFDM-символа запланированного для передачи данных в слоте передачи; и
- позиция последнего символа, запланированного для передачи данных в слоте передачи.
Предложенное решение может также включать в себя совместное отображение DM-RS и PT-RS. Позиция дополнительного DM-RS в слоте может зависеть от PT-RS, который отображается.
Один аспект состоит в том, что ресурс PT-RS может совпадать с первым DM-RS в слоте, когда запланирован PT-RS. Кроме того, когда в ресурсной сетке одновременно находятся дополнительный DM-RS и PT-RS, дополнительная позиция DM-RS может совпадать с позицией PT-RS.
В некоторых вариантах осуществления предусмотрен способ, используемый в радиоузле в системе беспроводной связи для одного из: передачи и приема опорного сигнала отслеживания фазы (PT-RS). Способ включает в себя получение информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте. Способ также включает в себя одно из: передачи и приема PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS.
В некоторых вариантах осуществления получение содержит одно из: приема информации о позиции и определения позиции во временной области запланированного первого DM-RS. В некоторых вариантах осуществления способ дополнительно включает в себя получение информации о позиции первого временного символа в слоте, запланированном для передачи данных. В некоторых вариантах осуществления способ также включает в себя получение информации о позиции последнего временного символа в слоте, запланированном для передачи данных. В некоторых вариантах осуществления способ также включает в себя получение информации, указывающей запланированную схему модуляции и кодирования (MCS), и передачу PT-RS с плотностью во времени на основе запланированной MCS. В некоторых вариантах осуществления плотность во времени равна одному из: 1, ½ и ¼. В некоторых вариантах осуществления способ включает в себя отображение PT-RS в ресурсные элементы (RE) в слоте на основе одного или более из: позиции запланированного первого DM-RS, запланированной MCS, требуемой плотности во времени, позиции первого временного символа, запланированного для передачи данных, и позиции последнего временного символа, запланированного для передачи данных. В некоторых вариантах осуществления первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают несколько поднесущих по частоте и по меньшей мере один временной символ слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и многочисленные временные символы слота по времени. В некоторых вариантах осуществления физический ресурсный блок (PRB) слота имеет 12 поднесущих в частотной области и одно из: 12 и 14 временных символов во временной области. В некоторых вариантах осуществления радиоузел представляет собой одно из: WD и сетевого узла.
Согласно другому аспекту предусмотрен радиоузел в системе беспроводной связи, выполненной с возможностью одного из: передачи и приема PT-RS. Радиоузел включает в себя схему обработки, выполненную с возможностью получения информации о позиции во временной области запланированного первого DM-RS в слоте. Схема обработки дополнительно выполнена с возможностью одного из передачи или приема PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS.
Согласно этому аспекту в некоторых вариантах осуществления получение содержит одно из: приема информации об или определения позиции во временной области запланированного первого DM-RS. В некоторых вариантах осуществления схема обработки дополнительно выполнена с возможностью получения информации о позиции первого временного символа в слоте, запланированном для передачи данных, и получения информации о позиции последнего временного символа в слоте, запланированном для передачи данных. В некоторых вариантах осуществления обработка дополнительно выполнена с возможностью получения информации, указывающей запланированную схему модуляции и кодирования (MCS), и передачи PT-RS с плотностью во времени на основе запланированной MCS. В некоторых вариантах осуществления плотность во времени равна одному из: 1, ½ и ¼. В некоторых вариантах осуществления схема обработки дополнительно выполнена с возможностью отображения PT-RS в ресурсные элементы (RE) в слоте на основе одного или более из: позиции запланированного первого DM-RS, запланированной MCS, требуемой плотности во времени, позиции первого временного символа, запланированного для передачи данных, и позиции последнего временного символа, запланированного для передачи данных. В некоторых вариантах осуществления первый PT-RS запланирован в ресурсных элементах (RE), которые охватывают несколько поднесущих по частоте и по меньшей мере один временной символ слота по времени, в то время как DM-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и многочисленные временные символы слота по времени. В некоторых вариантах осуществления физический ресурсный блок (PRB) слота имеет 12 поднесущих в частотной области и одно из: 12 и 14 временных символов во временной области. В некоторых вариантах осуществления радиоузел представляет собой одно из: WD и сетевого узла.
Согласно другому аспекту предусмотрен радиоузел в системе беспроводной связи, выполненной с возможностью одного из: передачи и приема PT-RS. Радиоузел включает в себя опорный сигнал демодуляции (DM-RS), причем модуль позиции выполнен с возможностью получения информации о позиции во временной области запланированного первого DM-RS в слоте. Радиоузел дополнительно включает в себя модуль приемопередатчика PT-RS, выполненный с возможностью одного из: передачи и приема PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS. В некоторых вариантах осуществления первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают несколько поднесущих по частоте и по меньшей мере один единственный временной символ слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и многочисленные временные символы слота по времени.
Краткое описание чертежей
Более полное понимание вариантов осуществления, описанных в данном документе, а также их сопутствующих преимуществ и признаков, можно обеспечить путем ссылки на последующее подробное описание при совместном рассмотрении с сопроводительными чертежами, на которых:
на фиг.1 показаны возможные шаблоны DM-RS для NR, которые поддерживают раннее декодирование для низкого доплеровского сдвига;
на фиг.2 показаны возможные шаблоны DM-RS для NR, которые поддерживают раннее декодирование для высокого доплеровского сдвига;
на фиг.3 показано добавление PT-RS на высоких несущих частотах;
на фиг.4 показаны результаты проведенной оценки для схемы 16 QAM (3/4) MCS;
на фиг.5 показаны результаты проведенной оценки для схемы 64 QAM (5/6) MCS;
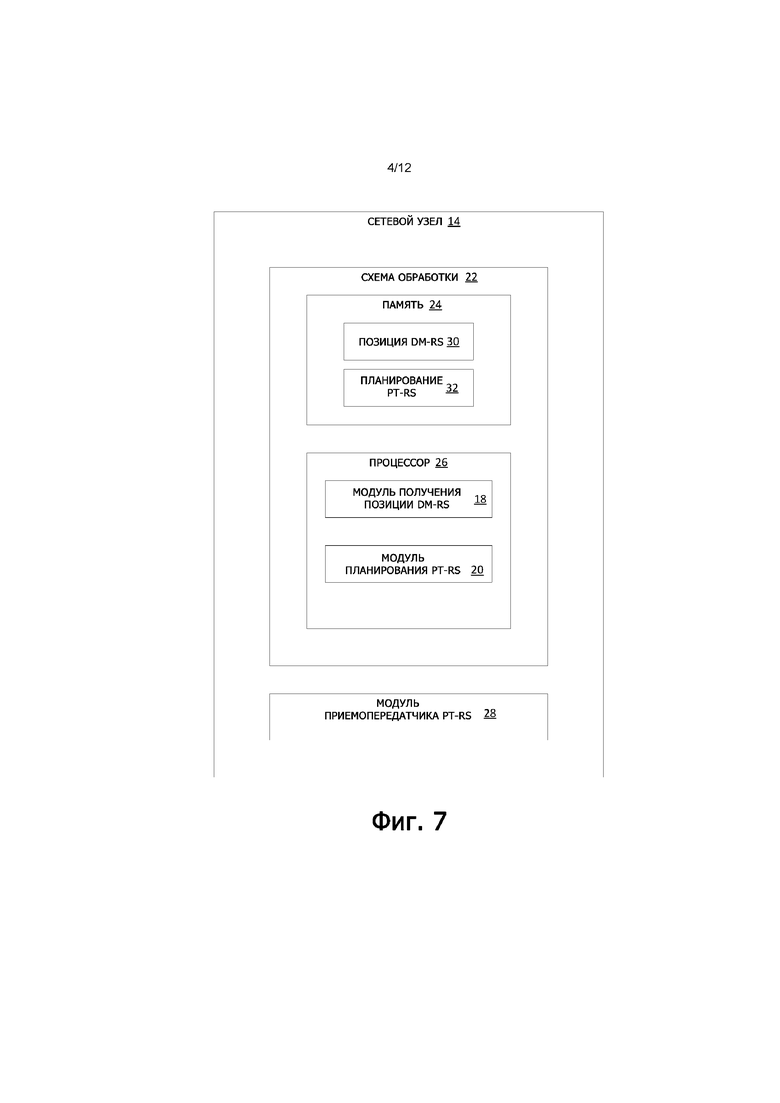
на фиг.6 показана блок-схема системы беспроводной связи, построенной в соответствии с принципами, изложенными в данном документе;
на фиг.7 показана блок-схема сетевого узла, построенного в соответствии с принципами, изложенными в данном документе;
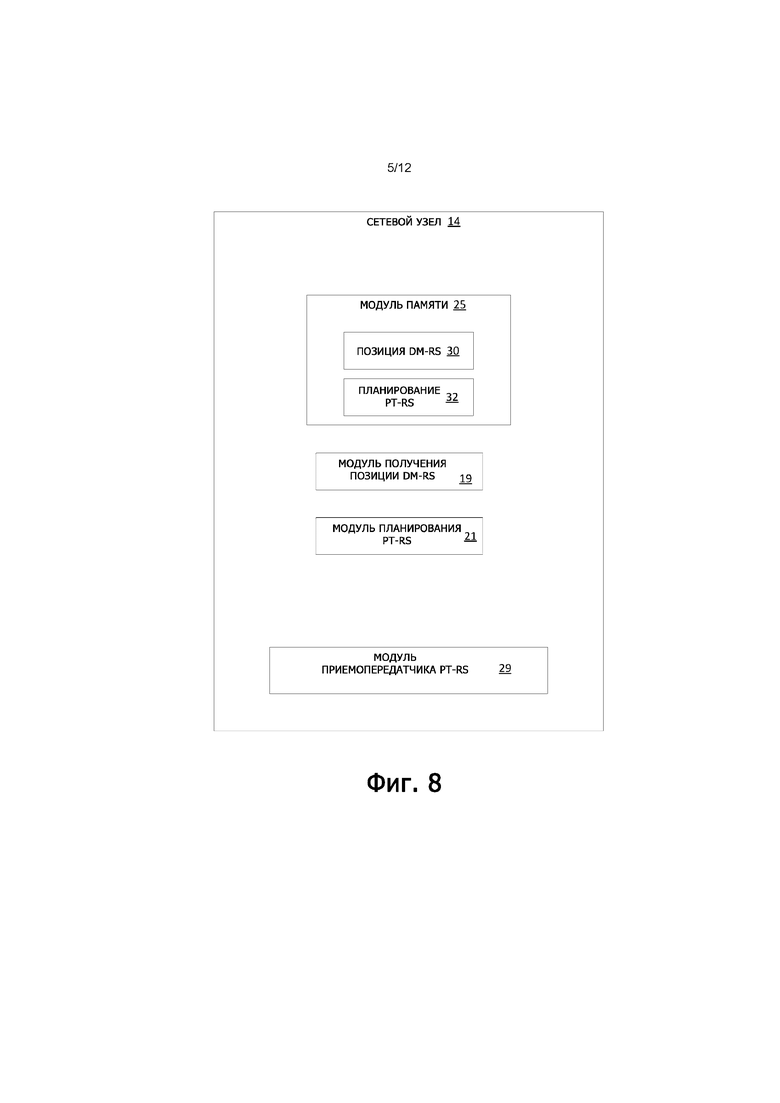
на фиг.8 показана блок-схема альтернативного варианта осуществления сетевого узла, построенного в соответствии с принципами, изложенными в данном документе;
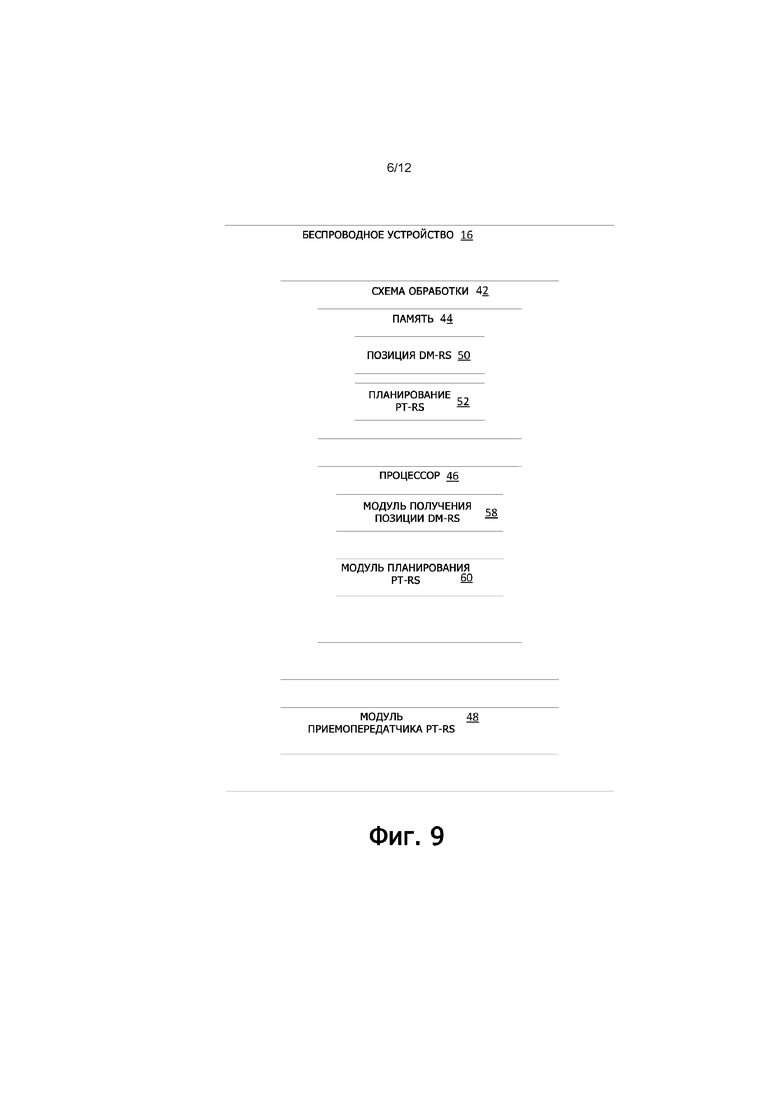
на фиг.9 показана блок-схема беспроводного устройства, построенного в соответствии с принципами, изложенными в данном документе;
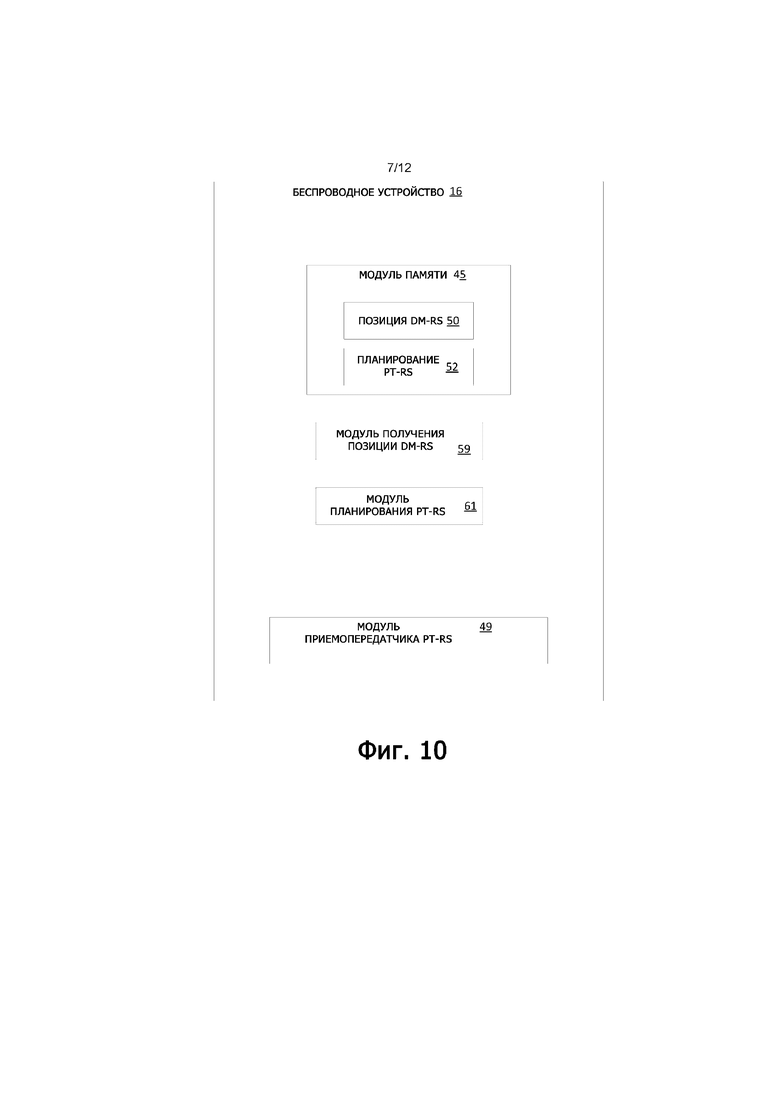
на фиг.10 показана блок-схема альтернативного варианта осуществления беспроводного устройства, построенного в соответствии с принципами, изложенными в данном документе; и
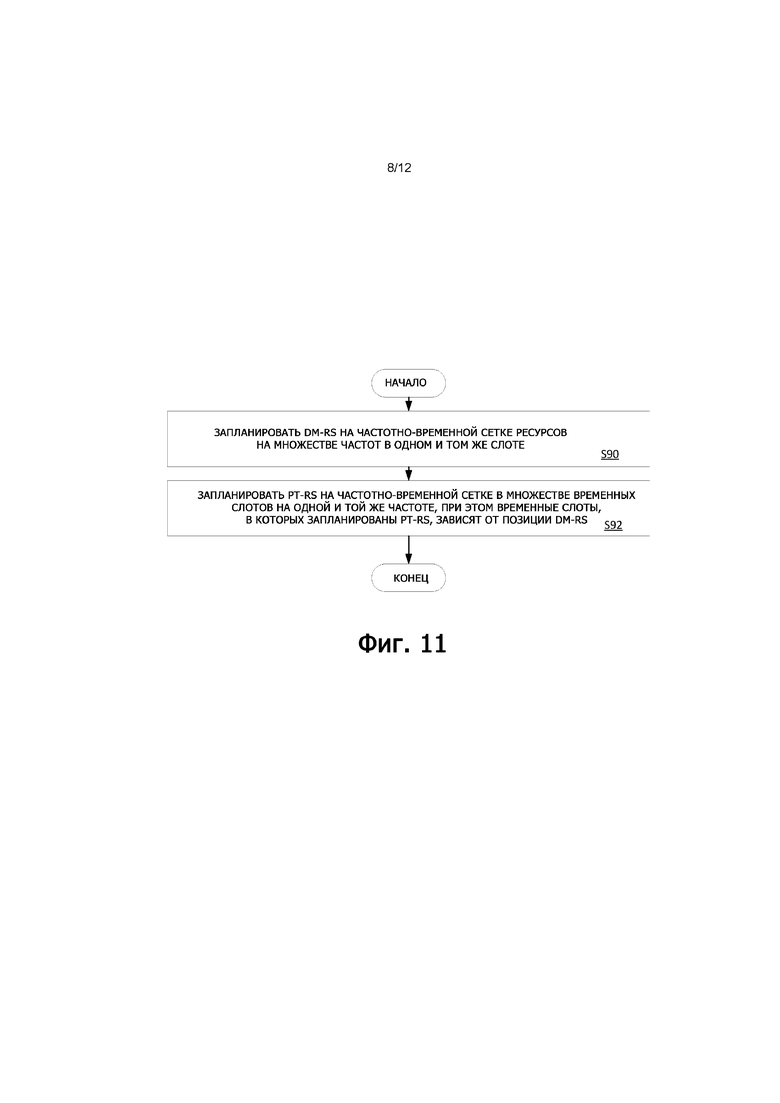
на фиг.11 показана блок-схема последовательности операций примерного процесса совместного планирования DM-RS и PT-RS, который может выполняться в беспроводном устройстве и/или сетевом узле.
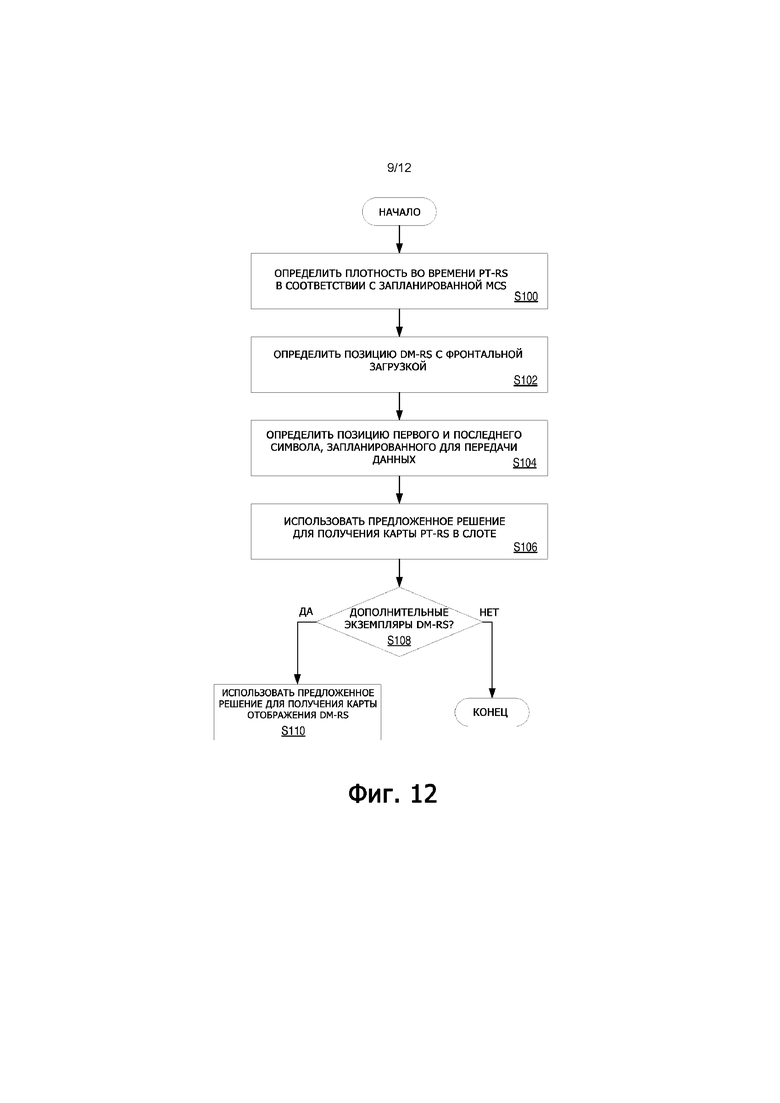
на фиг.12 показана блок-схема последовательности операций примерного процесса планирования DM-RS и PT-RS;
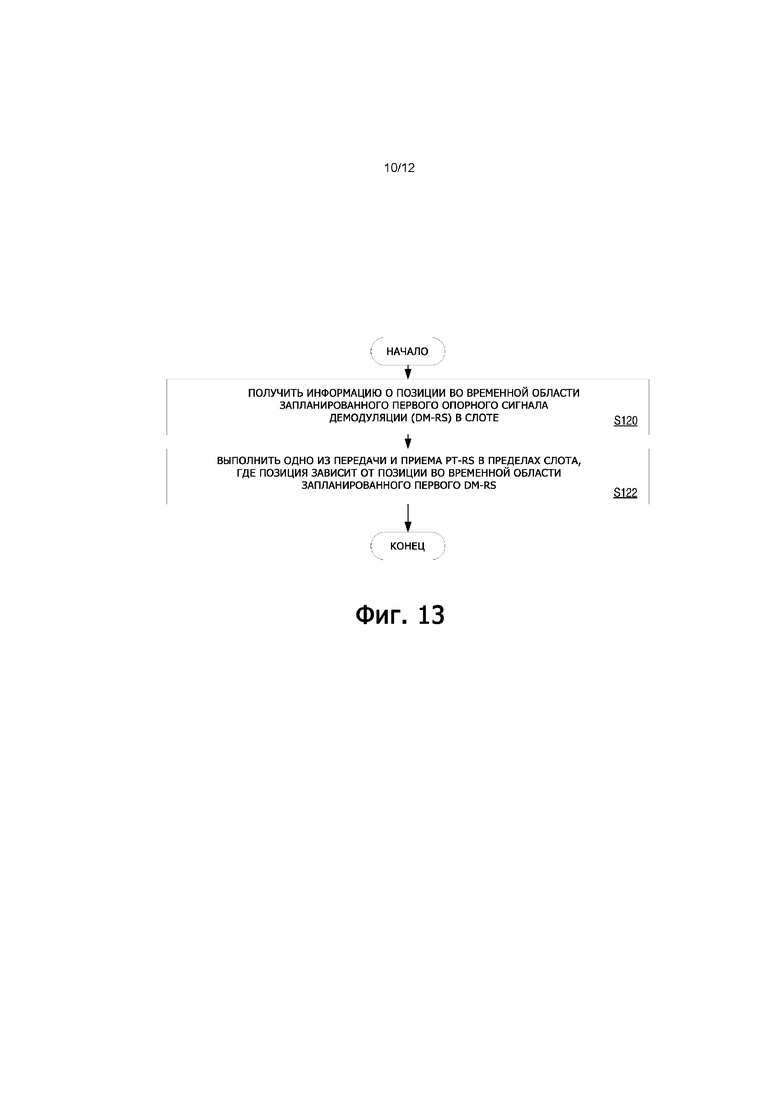
на фиг.13 показана блок-схема последовательности операций примерного процесса передачи и приема опорного сигнала отслеживания фазы (PT-RS);
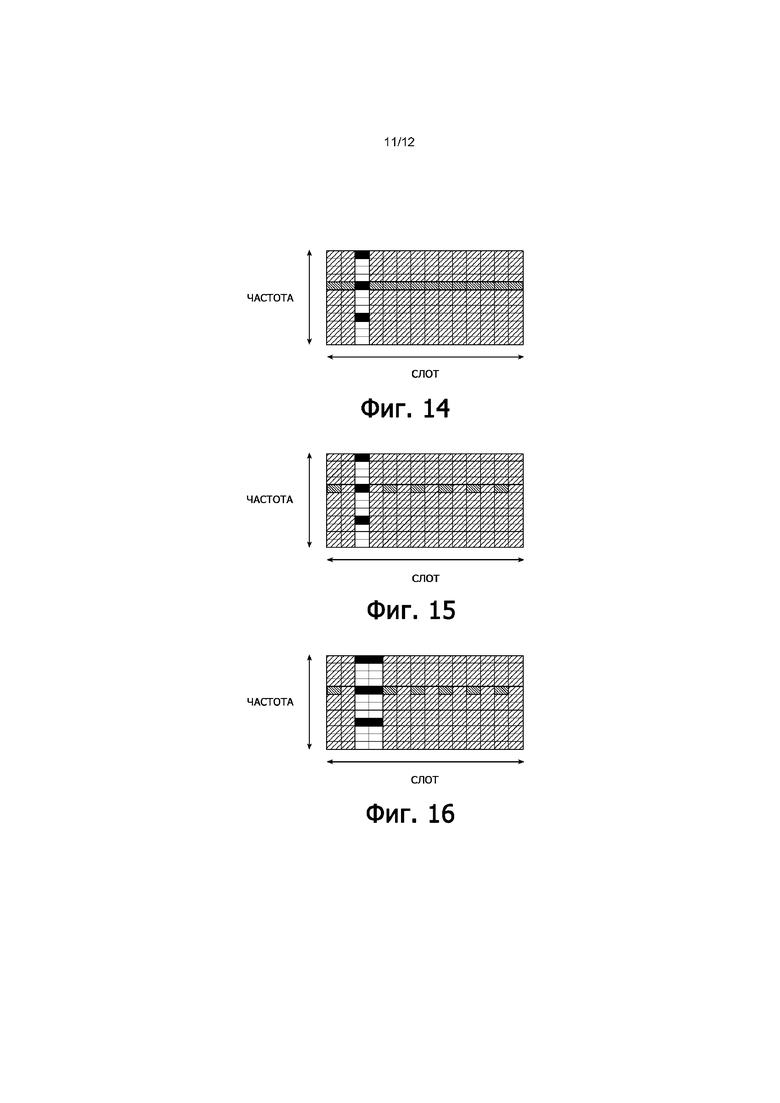
на фиг.14 показан один экземпляр DM-RS с согласованными DM-RS и PT-RS с плотностью во времени, равной 1;
на фиг.15 показан одиночный DM-RS с фронтальной загрузкой с согласованными DM-RS и PT-RS с плотностью во времени, равной ½;
на фиг.16 показан сдвоенный DM-RS с фронтальной загрузкой с согласованными DM-RS и PT-RS с плотностью во времени, равной ½;
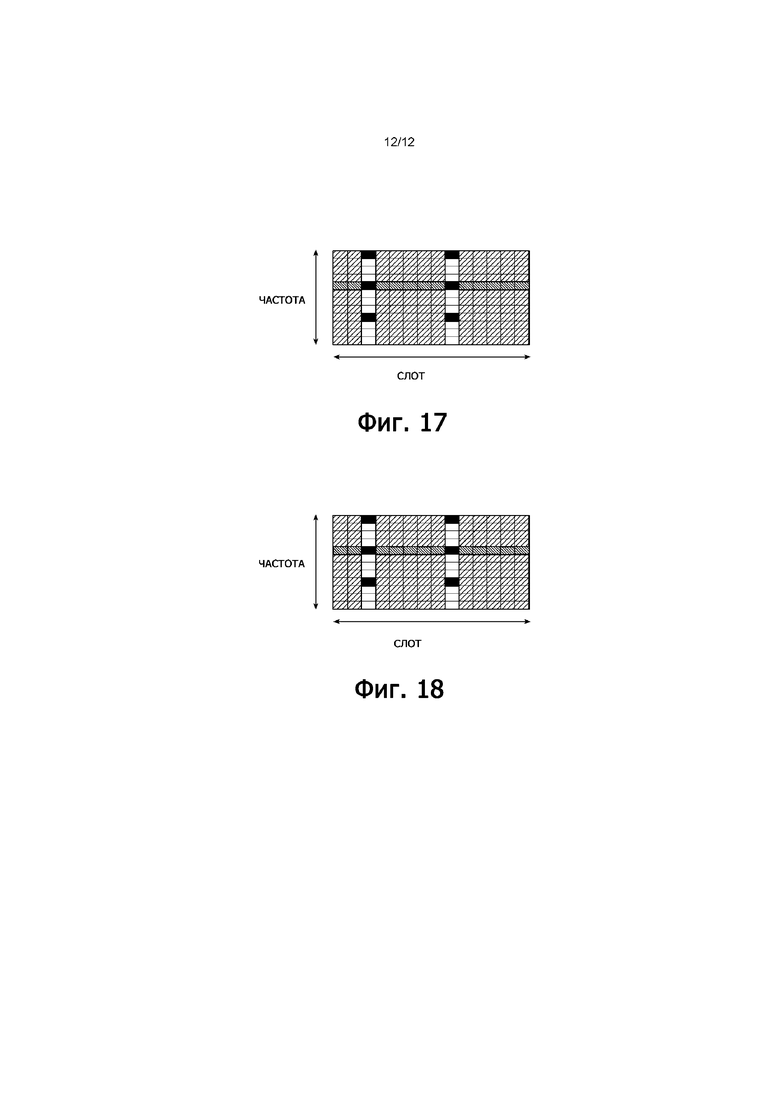
на фиг.17 показан шаблон DM-RS с фронтальной загрузкой с дополнительными DM-RS и PT-RS с плотностью во времени, равной 1;
на фиг.18 показан шаблон DM-RS с фронтальной загрузкой с дополнительными DM-RS и PT-RS с плотностью во времени, равной ½;
Осуществление изобретения
Перед подробным описанием примерных вариантов осуществления следует отметить, что варианты осуществления реализованы, главным образом, в виде комбинаций компонентов устройства и этапов обработки, которые относятся к планированию опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции DM-RS. Соответственно, компоненты системы и способа были представлены, где это уместно, обычными символами на чертежах, показывающими только те конкретные детали, которые имеют отношение к пониманию вариантов осуществления настоящего раскрытия, чтобы не затенять раскрытие подробностями, которые будут понятны специалистам в данной области техники, имеющим выгоду от описания, представленного в данном документе.
Используемые в данном документе относительные термины, такие как "первый" и "второй", "верхний" и "нижний" и т.п., могут использоваться исключительно для того, чтобы отличить один объект или элемент от другого объекта или элемента, не требуя или не подразумевая какого-либо физического или логического отношения или очередности между такими объектами или элементами.
Как правило, индикатор может явным и/или неявным образом указывать информацию, которую он представляет и/или указывает. Например, неявный индикатор может основываться на позиции и/или ресурсе, используемом для передачи. Например, явный индикатор может быть основан на параметризации с помощью одного или нескольких параметров, и/или одного или нескольких индексов и/или одного или нескольких битовых комбинаций, представляющих информацию. В частности, можно считать, что управляющая сигнализация, основанная на используемой последовательности ресурсов, как описано в данном документе, неявно указывает тип управляющей сигнализации.
Используемый в данном документе термин "сигнал" может быть любым физическим сигналом или физическим каналом. Примерами физических сигналов являются опорные сигналы, такие как PSS, SSS, CRS, PRS и т.д. Используемый в данном документе термин "физический канал" (например, в контексте приема канала) также называется "каналом". Примерами физических каналов являются MIB, PBCH, NPBCH, PDCCH, PDSCH, sPUCCH, sPDSCH, sPUCCH, sPUSCH, MPDCCH, NPDCCH, NPDSCH, E-PDCCH, PUSCH, PUCCH, NPUSCH и т.д. Эти термины/сокращения могут использоваться в соответствии с терминологией стандарта 3GPP, в частности, в соответствии с LTE и/или NR.
Для сотовой связи можно рассматривать по меньшей мере одно соединение, и/или канал и/или несущую восходящей линии связи (UL) и по меньшей мере одно соединение, и/или канал и/или несущую нисходящей линии связи (DL), например, используя и/или определяя соту, которая может быть предоставлена сетевым узлом, в частности, базовой станцией или eNodeB. Направление восходящей линии связи может относиться к направлению передачи данных из терминала в сетевой узел, например, в базовую станцию и/или ретрансляционную станцию. Направление нисходящей линии связи может относиться к направлению передачи данных из сетевого узла, например, базовой станции и/или ретрансляционного узла, в терминал. UL и DL могут быть связаны с различными частотными ресурсами, например, с несущими и/или спектральными полосами. Сота может содержать по меньшей мере одну несущую восходящей линии связи и по меньшей мере одну несущую нисходящей линии связи, которые могут иметь разные полосы частот. Сетевой узел, например, базовая станция, gNB или eNodeB, может быть выполнена с возможностью предоставления, и/или определения и/или управления одной или несколькими сотами, например, сотой PCell и/или сотой LA.
Передача по нисходящей линии связи может относиться к передаче из сети или сетевого узла в терминал. Передача по восходящей линии связи может относиться к передаче из терминала в сеть или сетевой узел. Передача по боковой линии связи может относиться к (прямой) передаче из одного терминала в другой терминал. Восходящая линия связи, нисходящая линия связи и боковая линия связи (например, передача и прием по боковой линии связи) могут рассматриваться как направления связи. В некоторых вариантах термины "восходящая линия связи" и "нисходящая линия связи" могут также использоваться для описания беспроводной связи между узлами сети, например, для беспроводной транзитной и/или ретрансляционной связи и/или (беспроводной) сетевой связи, например, между базовыми станциями или аналогичными сетевыми узлами, в частности, для связи, завершающейся на этом. Можно считать, что транзитная, и/или ретрансляционная связь и/или сетевая связь реализована как форма связи по боковой линии связи, или восходящей линии связи или подобной связи.
В общем случае конфигурирование может включать в себя определение данных конфигурации, представляющих конфигурацию, и предоставление, например, (параллельную и/или последовательную) передачу их в один или более других узлов, которые могут передавать их далее в радиоузел (или в другой узел, что может повторяться до тех пор, пока они не достигнут беспроводного устройства). Альтернативно или дополнительно, конфигурирование радиоузла, например, сетевым узлом или другим устройством, может включать в себя прием данных конфигурации и/или данных, относящихся к данным конфигурации, например, из другого узла, такого как сетевой узел 16, который может быть сетевым узлом более высокого уровня, и/или передачу принятых данных конфигурации в узел радиосвязи. Соответственно, определение конфигурации и передача данных конфигурации в радиоузел могут выполняться различными сетевыми узлами или объектами, которые могут иметь возможность обмениваться данными через подходящий интерфейс, например, интерфейс X2 в случае LTE или соответствующий интерфейс для NR. Конфигурирование терминала (например, WD) может содержать планирование передач по нисходящей линии связи и/или восходящей линии связи для терминала, например, сигнализацию передачи данных нисходящей линии связи, и/или управляющую сигнализацию нисходящей линии связи, и/или сигнализацию DCI, и/или управляющую сигнализацию восходящей линией связи, или сигнализацию передачи данных или сигнализацию связи, в частности, сигнализацию подтверждения, и/или конфигурирование ресурсов и/или пула ресурсов для них. В частности, конфигурация терминала (например, WD) может содержать конфигурирование WD для выполнения определенных измерений в определенных подкадрах или радиоресурсах и предоставления отчетов о таких измерениях в соответствии с вариантами осуществления настоящего раскрытия.
Сигнализация может содержать один или более сигналов и/или символов. Опорная сигнализация может содержать один или более опорных сигналов и/или символов. Сигнализация данных может относиться к сигналам и/или символам, содержащим данные, в частности, данные пользователя, и/или данные полезной нагрузки и/или данные с уровня связи выше радио и/или физического уровня/физических уровней. Можно считать, что сигнализация опорных сигналов демодуляции содержит один или более сигналов и/или символов демодуляции. В частности, сигнализация опорных сигналов демодуляции может содержать DM-RS в соответствии с технологиями 3GPP, и/или NR и/или LTE. В общем случае сигнализация опорных сигналов демодуляции может рассматриваться как представляющая сигнализацию, обеспечивающую эталон для приемного устройства, такого как терминал, для декодирования и/или демодуляции связанных данных, сигнализации или данных. Сигнализация опорных сигналов демодуляции может ассоциироваться с передачей данных или сигнализацией данных, в частности, с конкретной передачей данных или конкретной сигнализацией данных. Можно считать, что сигнализация данных и сигнализация опорных сигналов демодуляции чередуются и/или мультиплексируются, например, находятся в одном и том же временном интервале, охватывающем, например, подкадр, или слот или символ, и/или в одной и той же структуре частотно-временного ресурса, как ресурсный блок. Ресурсный элемент может представлять наименьший частотно-временной ресурс, например, представляющий временной и частотный диапазон, охватываемый одним символом или количеством битов, представленных в общей модуляции. Например, ресурсный элемент может охватывать длительность символа и поднесущую, в частности, в стандартах 3GPP, и/или NR и/или LTE. Передача данных может представлять и/или относиться к передаче конкретных данных, например, к конкретному блоку данных и/или транспортному блоку. В общем случае, сигнализация опорных сигналов демодуляции может содержать и/или представлять последовательность сигналов и/или символов, которые могут идентифицировать и/или определять сигнализацию опорных сигналов демодуляции.
Данные или информация могут относиться к любому виду данных, в частности, к любому из и/или к любой комбинации из управляющих данных, или пользовательских данных или данных полезной нагрузки. Управляющая информация (которая может также называться управляющими данными) может относиться к управлению и/или планированию данных и/или может относиться к процессу передачи данных и/или к функционированию сети или терминала.
На фиг.6 показана блок-схема сети беспроводной связи, сконфигурированная в соответствии с принципами, изложенным в данном документе. Сеть 10 беспроводной связи включает в себя облако 12, которое может включать в себя Интернет и/или коммутируемую телефонную сеть общего пользования (PSTN). Облако 12 может также служить транзитной сетью сети 10 беспроводной связи. Сеть 10 беспроводной связи включает в себя один или более сетевых узлов 14А и 14B, которые могут поддерживать связь напрямую через интерфейс X2 в вариантах осуществления LTE и все вместе упоминаются как сетевые узлы 14. Предполагается, что другие типы интерфейсов могут использоваться для связи между сетевыми узлами 14 для других протоколов связи, таких как New Radio (NR). Сетевые узлы 14 могут обслуживать беспроводные устройства 16А и 16В, все вместе упоминаемые здесь как беспроводные устройства 16. Следует отметить, что, хотя для удобства показаны только два беспроводных устройства 16 и два сетевых узла 14, сеть 10 беспроводной связи обычно может включать в себя намного больше беспроводные устройства (WD) 16 и сетевые узлы 14. Кроме того, в некоторых вариантах осуществления WD 16 могут связываться напрямую, используя то, что иногда называют соединением по боковой линии связи.
Используемый в данном документе термин "беспроводное устройство" или "мобильный терминал" может относиться в беспроводному устройству любого типа, поддерживающему связь с сетевым узлом 14 и/или с другим беспроводным устройством 16 в системе 10 сотовой или мобильной связи. Примерами беспроводного устройства 16 являются пользовательские оборудование (UE), целевое устройство, беспроводное устройство для связи между устройствами (D2D), беспроводное устройство машинного типа или беспроводное устройство, поддерживающее связь между машинами (M2M), PDA, планшетный компьютер, смартфон, встраиваемое в переносной компьютер оборудование (LEE), устанавливаемое на переносной компьютер оборудование (LME), USB-ключ и т.д.
Используемый в данном документе термин "сетевой узел" может относиться к любому виду базовой радиостанции, действующей в радиосети, которая может дополнительно содержать любую базовую приемопередающую станцию (BTS), контроллер базовой станции (BSC), контроллер радиосети (RNC), развитой узел B (eNB или eNodeB), gNodeB NR, gNB NR, узел B (Node B), радиоузел многостандартного радио (MSR), такой как BS MSR, ретрансляционный узел, ретранслятор, управляющий донорским узлом, точка радиодоступа (AP), точки передачи, узлы передачи, удаленная радиоголовка (RRH) удаленного радиоблока (RRU), узлы распределенной антенной системы (DAS) и т.д.
Хотя варианты осуществления описаны в данном документе со ссылкой на определенные функции, выполняемые сетевым узлом 14, понятно, что функции могут выполняться в других сетевых узлах и элементах. Также понятно, что функции сетевого узла 14 могут быть распределены по сетевому облаку 12, так что другие узлы могут выполнять одну или более функций или даже части функций, описанных в данном документе. Кроме того, функции, описанные в данном документе как выполняемые сетевым узлом 14, могут также выполняться беспроводным устройством 16.
Сетевой узел 14 имеет информацию 30 о позиции DM-RS, которая может храниться в памяти. Информация о позиции DM-RS включает в себя информацию о позиции во временной области запланированного первого DM-RS в слоте. Сетевой узел 14 также имеет приемопередатчик 28 PT-RS, выполненный с возможностью передачи или приема PT-RS в интервале, где позиция PT-RS зависит от позиции DM-RS. Аналогичным образом, беспроводное устройство 16 может включать в себя информацию 50 о позиции DM-RS и приемопередатчик 48 PT-RS, которые выполняют те же функции, что и память 30 позиции DM-RS и приемопередатчик 28 PT-RS, соответственно.
На фиг.7 показана блок-схема сетевого узла 14, выполненного с возможностью совместного планирования DM-RS и PT-RS. Сетевой узел 14 имеет схему 22 обработки. В некоторых вариантах осуществления схема обработки может включать в себя память 24 и процессор 26, причем память 24 содержит инструкции, которые при их исполнении процессором 26 конфигурируют процессор 26 для выполнения одной или нескольких функций, описанных в данном документе. В дополнение к традиционному процессору и памяти, схема 22 обработки может включать в себя интегральные схемы для обработки и/или управления, например, один или более процессоров, и/или ядер процессора, и/или программируемые пользователем вентильные матрицы (FPGA) и/или специализированные интегральные схемы (ASIC).
Схема 22 обработки может включать в себя, и/или быть подключенной и/или выполненной с возможностью доступа (например, записи в и/или считывания из) к памяти 24, которая может включать в себя энергозависимую и/или энергонезависимую память любого вида, например, кэш-память, и/или буферная память, и/или оперативное запоминающее устройство (RAM), и/или постоянное запоминающее устройство (ROM), и/или оптическую память и/или стираемое программируемое постоянное запоминающее устройство (EPROM). Такая память 24 может быть выполнена с возможностью хранения кода, исполняемого схемой управления, и/или других данных, например, данных, относящихся к связи, например, данных конфигурации, и/или адреса узлов и т.д. Схема 22 обработки может быть выполнена с возможностью управления любым из способов, описанных в данном документе, и/или таким образом, чтобы такие способы выполнялись, например, процессором 26. Соответствующие инструкции могут храниться в памяти 24, которая может быть считываемой и/или подключенной с возможностью считывания к схеме 22 обработки. Другими словами, схема 22 обработки может включать в себя контроллер, который может включать в себя микропроцессор, и/или микроконтроллер, и/или устройство на основе программируемой пользователем полевой вентильной матрицы (FPGA) и/или устройство на основе специализированной интегральной схемы (ASIC). Можно считать, что схема 22 обработки включает в себя, или может быть подключена или имеет возможность подключения к памяти, которая может быть выполнена таким образом, чтобы быть доступной для считывания и/или записи контроллером и/или схемой 22 обработки.
Память 24 выполнена с возможностью хранения информации 30 о позиции DM-RS и информации 32 о планировании PT-RS. Процессор 26 реализует блок 18 получения позиции DM-RS, выполненный с возможностью получения информации о позиции во временной области запланированного первого DM-RS в слоте. Процессор 26 также может реализовывать блок 20 планирования PT-RS, выполненный с возможностью планирования PT-RS в слоте. Приемопередатчик 28 выполнен с возможностью передачи PT-RS в беспроводное устройство 16 или приема PT-RS из беспроводного устройства 16, где позиция PT-RS зависит от позиции первого DM-RS.
На фиг.8 показана блок-схема альтернативного варианта осуществления сетевого узла 14, выполненного с возможностью совместного планирования DM-RS и PT-RS. Модуль 25 памяти выполнен с возможностью хранения информации 30 о позиции DM-RS и информации 32 о планировании PT-RS. Модуль 19 получения позиции DM-RS выполнен с возможностью получения информации о позиции во временной области запланированного первого DM-RS в слоте. Модуль 21 планирования PT-RS выполнен с возможностью планирования PT-RS в слоте. Модуль 29 приемопередатчика выполнен с возможностью передачи PT-RS в беспроводное устройство 16 или приема PT-RS из беспроводного устройства 16, где позиция PT-RS зависит от позиции первого DM-RS.
Следует отметить, что одни и те же компоненты, показанные на фиг.7 в сетевом узле 14, могут быть реализованы в беспроводном устройстве 16 для совместного планирования DM-RS и PT-RS беспроводным устройством 16 для передачи по восходящей линии связи. Таким образом, беспроводное устройство 16 может иметь средство 58 для получения позиции DM-RS и средство 60 для планирования PT-RS с целью совместного планирования DM-RS и PT-RS в восходящей линии связи.
Соответственно, на фиг.9 показана блок-схема беспроводного устройства 16, выполненного с возможностью совместного планирования DM-RS и PT-RS. Беспроводное устройство 16 имеет схему 42 обработки. В некоторых вариантах осуществления схема обработки может включать в себя память 44 и процессор 46, причем память 44 содержит инструкции, которые при исполнении процессором 46 конфигурируют процессор 46 для выполнения одной или нескольких описанных функций в данном документе. В дополнение к традиционному процессору и памяти схема 42 обработки может включать в себя интегральные схемы для обработки и/или управления, например, один или более процессоров и/или процессорных ядер, и/или программируемые пользователем вентильные матрицы (FPGA) и/или специализированные интегральные схемы (ASIC).
Схема 42 обработки может включать в себя, и/или может быть подключена и/или выполнена с возможностью доступа (например, для записи в и/или считывания из) к памяти 44, которая может включать в себя любой тип энергозависимой и/или энергонезависимой памяти, например, кэш-память, и/или буферную память, и/или оперативное запоминающее устройство (RAM), и/или постоянное запоминающее устройство (ROM), и/или оптическую память и/или стираемое программируемое постоянное запоминающее устройство (EPROM). Такая память 44 может быть выполнена с возможностью хранения кода, исполняемого схемой управления, и/или других данных, например, данных, относящихся к связи, например, данных конфигураций и/или адресов узлов и т.д. Схема 42 обработки может быть выполнена с возможностью управления любым из способов, описанных в данном документе, и/или таким образом, чтобы такие способы выполнялись, например, процессором 46. Соответствующие инструкции могут храниться в памяти 44, которая может быть читаемой и/или читаемой, подключенной к схеме 42 обработки. Другими словами, схема 42 обработки может включать в себя контроллер, который может включать в себя микропроцессор и/или микроконтроллер, и/или устройство на основе программируемой пользователем вентильной матрицы (FPGA) и/или устройство на основе специализированной интегральной схемы (ASIC). Можно считать, что схема 42 обработки включает в себя, или может быть подключена или имеет возможность подключения к памяти, которая может быть выполнена с возможностью доступа для считывания и/или записи контроллером и/или схемой 42 обработки.
Память 44 выполнена с возможностью хранения информации 50 о позиции DM-RS и информации 52 о планировании PT-RS. Процессор 46 реализует модуль 58 получения позиции DM-RS, выполненный с возможностью получения информации о позиции во временной области запланированного первого DM-RS в слоте. Процессор 46 также реализует модуль 60 планирования PT-RS, выполненный с возможностью планирования PT-RS в слоте. Приемопередатчик 48 выполнен с возможностью передачи PT-RS в сетевой узел 14 или приема PT-RS из сетевого узла 14, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS.
На фиг.10 показана блок-схема альтернативного варианта осуществления беспроводного устройства 16, выполненного с возможностью совместного планирования DM-RS и PT-RS. Модуль 45 памяти выполнен с возможностью хранения информации 50 о позиции DM-RS и информации 52 о планировании PT-RS. Модуль 59 получения позиции DM-RS выполнен с возможностью получения информации о позиции во временной области запланированного первого DM-RS в слоте. Модуль 61 планирования PT-RS выполнен с возможностью планирования PT-RS в слоте. Модуль 49 приемопередатчика выполнен с возможностью передачи PT-RS в сетевой узел 14 или приема PT-RS из сетевого узла 14, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS.
На фиг.11 показана блок-схема последовательности операций примерного процесса совместного планирования DM-RS и PTRS. Этот процесс может выполняться в сетевом узле 14 и/или в беспроводном устройстве 16. Процесс включает в себя планирование, посредством процессора 26, 46, DM-RS на сетке частотно-временных ресурсов с множеством частот в одном и том же временном интервале (этап S90). Процесс также включает в себя планирование, посредством модуля 20, 60 планирования PT-RS, PT-RS на частотно-временной сетке с множеством временных слотов на одной и той же частоте, причем временные слоты, в которых запланированы PT-RS, зависят от позиции DM-RS (этап S92).
Преимущество некоторых вариантов осуществления состоит в том, что можно уменьшить общие издержки, связанные с опорными сигналами, и избежать "загрязнения" пилот-сигналов, достигая при этом требуемого качества оценки. Основные этапы варианта осуществления предложенной совместной структуры позиции DM-RS и PT-RS показаны на фиг.12. Процесс включает в себя определение, посредством модуля 20, 60 планирования PT-RS, плотности во времени PT-RS в соответствии с запланированной MCS (этап S100). Процесс также включает в себя определение, посредством модуля 18, 58 получения позиции DM-RS, позиции DM-RS с фронтальной загрузкой (этап S102). Процесс, дополнительно включает в себя определение, посредством процессора 26, 46, позиции первого и последнего символа, запланированных для передачи данных (этап S104). Затем предлагаемое и описанное в данном документе решение используется для получения карты отображения PT-RS в слоте (этап S106). Если имеются дополнительные экземпляры DM-RS (этап S108), то предлагаемое решение используется для получения карты отображения DM-RS (этап S110). В противном случае процесс завершается.
На фиг.13 показана блок-схема последовательности операций примерного процесса передачи или приема опорного сигнала отслеживания фазы (PT-RS). Процесс включает в себя получение, посредством модуля 18, 48 получения позиции DM-RS, информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте (этап S120). Позиция может быть получена из WD 16 путем планирования управления радиоресурсами DM-RS. Процесс также включает в себя одно из: передачи и приема, посредством приемопередатчика 28, 48 PT-RS, PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого PT-RS (этап S122).
После того как описана общая последовательность операций процесса, выполняемых устройствами согласно раскрытию, и представлены примеры аппаратных и программных устройств для выполнения процессов и функций раскрытия, ниже приводится подробное описание и примеры устройств для реализации вариантов осуществления раскрытия и для передачи и приема PT-RS.
Предложенное решение может иметь по меньшей мере некоторые из следующих преимуществ:
- снижение общих затрат на опорные сигналы при планировании DM-RS и PT-RS;
- общая структура обоих опорных сигналов, которые адаптированы к фактической позиции DM-RS с фронтальной загрузкой в слоте; и
- оба типа опорных сигналов позволяют обеспечить желаемое качество оценки.
В некоторых вариантах осуществления процесс можно описать следующим образом. Рассмотрим передачу на основе слотов. Интервал между слотами может быть равен длине OFDM-символа, равной, например, 7 или 14 символам. Индекс символа имеет диапазон  . Отображение PT-RS во временной области определяется выражением
. Отображение PT-RS во временной области определяется выражением
 ,
,
где  – набор, содержащий позицию DM-RS с фронтальной загрузкой;
– набор, содержащий позицию DM-RS с фронтальной загрузкой;
 – расстояние между экземплярами PT-RS, которое обратно пропорционально плотности по времени PT-RS;
– расстояние между экземплярами PT-RS, которое обратно пропорционально плотности по времени PT-RS;
 – первый символ, запланированный для передачи данных в слоте; и
– первый символ, запланированный для передачи данных в слоте; и
 – последний символ, запланированный для передачи данных в слоте.
– последний символ, запланированный для передачи данных в слоте.
Допустим  представляет собой набор, содержащий временную позицию PT-RS в слоте передачи. Для того чтобы получить согласованную структуру для DM-RS и PT-RS с фронтальной загрузкой, можно определить следующим образом:
представляет собой набор, содержащий временную позицию PT-RS в слоте передачи. Для того чтобы получить согласованную структуру для DM-RS и PT-RS с фронтальной загрузкой, можно определить следующим образом:

Допустим  представляет собой набор потенциальных позиций дополнительного DM-RS в слоте. Для того чтобы получить согласованную структуру для DM-RS и PT-RS, можно определить следующим образом:
представляет собой набор потенциальных позиций дополнительного DM-RS в слоте. Для того чтобы получить согласованную структуру для DM-RS и PT-RS, можно определить следующим образом:

Таким образом, экземпляры DM-RS представляют собой подмножество экземпляров PT-RS, обладающих согласованной структурой для PT-RS и DM-RS. Подводя итог, можно сказать, что общие критерии предлагаемого решения согласно некоторым вариантами осуществления можно выразить следующим образом:

 ,
,  ,
,  .
.
Вариант осуществления: DM-RS и PT-RS с фронтальной загрузкой с плотностью во времени, равной 1
На фиг.14 показан пример совместной структуры для PT-RS с плотностью во времени, равной 1, и единичным шаблоном экземпляра DMRS с фронтальной загрузкой.
На фиг.15 показан пример совместной структуры для одиночного шаблона DM-RS с фронтальной загрузкой и PT-RS с плотностью во времени, равной 1/2. Можно видеть, что при использовании совместной структуры для DM-RS и PT-RS издержки на опорные сигналы в слоте могут сохраняться на низком уровне (так как экземпляр DM-RS могут быть повторно использоваться для оценки фазового шума вместо PT-RS). Без совместной структуры плотность во времени опорных сигналов может быть выше 1/2.
На фиг.16 показан пример совместной структуры для двойного шаблона DM-RS с фронтальной загрузкой и PT-RS с плотностью во времени, равной ½. Преимущество предложенной совместной структуры в некоторых вариантах осуществления состоит в том, что отображение PT-RS не изменяется для одиночного шаблона DM-RS с фронтальной загрузкой.
Вариант осуществления: DM-RS с фронтальной загрузкой с дополнительным экземпляром DM-RS и PT-RS с плотностью во времени, равной 1
На фиг.17 показан пример совместной структуры для шаблона DM-RS с фронтальной загрузкой с дополнительными DM-RS и PT-RS с плотностью во времени, равной 1.
Вариант осуществления: DM-RS с фронтальной загрузкой с дополнительным экземпляром DM-RS и PT-RS с плотностью во времени, равной ½
На фиг.18 показан пример совместной структуры для шаблона DM-RS с фронтальной загрузкой с дополнительным экземпляром DM-RS и PT-RS с плотностью во времени, равной 1/2. При использовании совместной структуры для DM-RS и PT-RS издержки на опорные сигналы во временной области в слоте могут сохраняться на низком уровне (так как экземпляры DM-RS могут повторно использоваться для оценки фазового шума вместо PT-RS). Без совместной структуры плотность во времени опорных сигналов может быть больше 1/2.
Преимущество некоторых вариантов осуществления состоит в том, что совместная структура DM-RS и PT-RS позволяет уменьшить издержки опорных сигналов во временной области, сохраняя при этом точность оценок, основанных на опорных сигналах.
PT-RS обычно планируется только для одного антенного порта (связанного с одним портом DMRS), то есть отсутствует мультиплексирование ресурсов, используемых PT-RS, что открывает путь для выравнивания ресурсных элементов DM-RS и PT-RS, тем самым уменьшая затраты. Плотность PT-RS зависит от схемы модуляции и кодирования (MCS), которая обеспечивает свободу размещения DM-RS в ресурсной сетке с использованием различных смещений по времени с одинаковой производительностью. Поскольку PT-RS является сигналом временной области, который охватывает сетку ресурсов с определенной плотностью, он также предоставляет набор позиций, с которыми может быть выровнен DM-RS. В результате, когда запланированы дополнительные DMRS, существует по меньшей мере одна позиция ресурса PT-RS, которая обеспечивает желаемое качество оценки канала.
В некоторых вариантах осуществления предусмотрен способ, который используется в радиоузле 14, 16 в системе беспроводной связи для одного из: передачи и приема опорного сигнала отслеживания фазы (PT-RS). Способ включает в себя получение (этап S120) информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте. Информацию о позиции можно получить, например, из беспроводного устройства 16 посредством планирования управления радиоресурсами DM-RS. Способ также включает в себя одно из: передачи и приема (этап S122) PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS.
В некоторых вариантах осуществления получение содержит одно из: приема информации о и определения позиции во временной области запланированного первого DM-RS. В некоторых вариантах осуществления способ дополнительно включает в себя получение информации о позиции первого временного символа в слоте, запланированном для передачи данных. В некоторых вариантах осуществления способ также включает в себя получение информации о позиции последнего временного символа в слоте, запланированном для передачи данных. В некоторых вариантах осуществления способ также включает в себя получение информации, указывающей запланированную схему модуляции и кодирования (MCS), и передачу PT-RS с плотностью во времени на основе запланированной MCS. Это может иметь место для OFDM, тогда как для сигналов DFTS-OFDM обмен сообщениями более высокого уровня может использоваться для указания плотности во времени. В некоторых вариантах осуществления плотность во времени равна одному из: 1, ½ и ¼. В некоторых вариантах осуществления способ включает в себя отображение PT-RS в ресурсные элементы (RE) в слоте на основе одного или более из: позиции запланированного первого DM-RS, запланированной MCS, требуемой плотности во времени, позиции первого временного символа, запланированного для передачи данных, и позиции последнего временного символа, запланированного для передачи данных. В некоторых вариантах осуществления первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают несколько поднесущих по частоте и один или два временных символа слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и многочисленные временные символы слота по времени. В некоторых вариантах осуществления физический ресурсный блок (PRB) слота имеет 12 поднесущих в частотной области и одно из: 12 и 14 временных символов во временной области. В некоторых вариантах осуществления радиоузел 14, 16 является одним из: WD и сетевого узла. В некоторых вариантах осуществления дополнительный DM-RS планируется в одном и том же слоте, как и первые DM-RS и PT-RS, и позиция второго DM-RS зависит от позиции PT-RS. В некоторых вариантах осуществления PT-RS передается только в частотном диапазоне миллиметровых длин волн.
Согласно другому аспекту предусмотрен радиоузел 14, 16 в системе беспроводной связи, выполненный с возможностью одного из: передачи и приема опорного сигнала отслеживания фазы (PT-RS). Радиоузел 14, 16 включает в себя схему обработки, выполненную с возможностью получения информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте. Схема 22, 42 обработки дополнительно выполнена с возможностью одного из: передачи и приема PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS.
Согласно этому аспекту в некоторых вариантах осуществления получение содержит одно из: приема и определения информации о позиции во временной области запланированного первого DM-RS. В некоторых вариантах осуществления схема 22, 42 обработки дополнительно выполнена с возможностью получения информации о позиции первого временного символа в слоте, запланированном для передачи данных, и получения информации о позиции последнего временного символа в слоте, запланированном для передачи данных. В некоторых вариантах осуществления схема 22, 42 обработки дополнительно выполнена с возможностью получения информации, указывающей запланированную схему модуляции и кодирования (MCS), и передачи PT-RS с плотностью во времени на основе запланированной MCS. В некоторых вариантах осуществления плотность во времени равна одному из: 1, ½ и ¼. В некоторых вариантах осуществления схема 22, 42 обработки дополнительно выполнена с возможностью отображения PT-RS в ресурсные элементы (RE) в слоте на основе одного или более из: позиции запланированного первого DM-RS, запланированной MCS, требуемой плотности во времени, позиции первого временного символа, запланированного для передачи данных, и позиции последнего временного символа, запланированного для передачи данных. В некоторых вариантах осуществления первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают несколько поднесущих по частоте и по меньшей мере один временной символ слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и многочисленные временные символы слота по времени. В некоторых вариантах осуществления физический ресурсный блок (PRB) слота имеет 12 поднесущих в частотной области и одно из: 12 и 14 временных символов во временной области. В некоторых вариантах осуществления радиоузел 14, 16 является одним из: WD и сетевого узла.
Согласно другому аспекту предусмотрен радиоузел 14, 16 в системе беспроводной связи, выполненной с возможностью одного из: передачи и приема опорного сигнала отслеживания фазы (PT-RS). Радиоузел 14, 16 включает в себя опорный сигнал демодуляции (DM-RS), модуль 19, 59 получения позиции, выполненный с возможностью получения информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте. Радиоузел 14, 16 дополнительно включает в себя модуль 29, 49 приемопередатчика PT-RS, выполненный с возможностью одного из: передачи и приема PT-RS в пределах слота, где позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS. В некоторых вариантах осуществления первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают несколько поднесущих по частоте и по меньшей мере один временной символ слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и многочисленные временные символы слота по времени.
Некоторые варианты осуществления включают в себя следующее:
Вариант 1 осуществления. Способ планирования опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции (DM-RS), причем способ содержит:
планирование DM-RS на сетке частотно-временных ресурсов с множеством частот в одном и том же временном интервале; и
планирование PT-RS на частотно-временной сетке с множеством временных слотов на одной и той же частоте, причем временные слоты, в которых запланированы PT-RS, зависят от позиции DM-RS.
Вариант 2 осуществления. Способ согласно варианту 1 осуществления, в котором плотность во времени PT-RS зависит от выбранной схемы модуляции и кодирования.
Вариант 3 осуществления. Способ согласно любому из вариантов 1 и 2 осуществления, в котором плотность во времени равна одной второй.
Вариант 4 осуществления. Способ согласно любому из вариантов осуществления 1-3, в котором DM-RS имеет одиночную фронтальную загрузку.
Вариант 5 осуществления. Способ согласно любому из вариантов осуществления 1-3, в котором DM-RS имеет двойную фронтальную загрузку.
Вариант 6 осуществления. Способ согласно любому из вариантов осуществления 1-5, в котором способ выполняется сетевым узлом.
Вариант 7 осуществления. Способ согласно любому из вариантов осуществления 1-5, в котором способ выполняется беспроводным устройством.
Вариант 8 осуществления. Сетевой узел, выполненный с возможностью планирования опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции (DM-RS), причем сетевой узел содержит:
схему обработки, выполненную с возможностью:
планирования DM-RS на сетке частотно-временных ресурсов с множеством частот в одном и том же временном интервале; и
планирования PT-RS на частотно-временной сетке с множеством временных слотов на одной и той же частоте, причем временные слоты, в которых запланированы PT-RS, зависят от позиции DM-RS.
Вариант 9 осуществления. Сетевой узел согласно варианту 8 осуществления, в котором плотность во времени PT-RS зависит от выбранной схемы модуляции и кодирования.
Вариант 10 осуществления. Сетевой узел согласно любому из вариантов 8 и 9 осуществления, в котором плотность во времени равна одной второй.
Вариант 11 осуществления. Сетевой узел согласно любому из вариантов 8-10 осуществления, в котором DM-RS имеет одиночную фронтальную загрузку.
Вариант 12 осуществления. Сетевой узел согласно любому из вариантов 8-10 осуществления, в котором DM-RS имеет двойную фронтальную загрузку.
Вариант 13 осуществления. Сетевой узел, выполненный с возможностью планирования опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции (DM-RS), причем сетевой узел содержит:
модуль планирования DM-RS, выполненный с возможностью планирования DM-RS на сетке частотно-временных ресурсов с множеством частот в одном и том же временном интервале; и
модуль планирования PT-RS выполненный с возможностью планирования PT-RS на частотно-временной сетке с множеством временных слотов на одной и той же частоте, причем временные слоты, в которых запланированы PT-RS, зависят от позиции DM-RS.
Вариант 14 осуществления. Беспроводное устройство, выполненное с возможностью планирования опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции (DM-RS), причем беспроводное устройство содержит:
схему обработки, выполненную с возможностью:
планирования DM-RS на сетке частотно-временных ресурсов с множеством частот в одном и том же временном интервале; и
планирования PT-RS на частотно-временной сетке с множеством временных слотов на одной и той же частоте, причем временные слоты, в которых запланированы PT-RS, зависят от позиции DM-RS.
Вариант 15 осуществления. Сетевой узел по п.14, в котором плотность во времени PT-RS зависит от выбранной схемы модуляции и кодирования.
Вариант 16 осуществления. Сетевой узел согласно любому из вариантов 14 и 15 осуществления, в котором плотность во времени равна одной второй.
Вариант 17 осуществления. Сетевой узел согласно любому из вариантов 14-16 осуществления, в котором DM-RS имеет одиночную фронтальную загрузку.
Вариант 18 осуществления. Сетевой узел согласно любому из вариантов 14-16 осуществления, в котором DM-RS имеет двойную фронтальную загрузку.
Вариант 19 осуществления. Беспроводное устройство, выполненное с возможностью планирования опорных сигналов отслеживания фазы (PT-RS) совместно с опорными сигналами демодуляции (DM-RS), причем беспроводное устройство содержит:
модуль планирования DM-RS, выполненный с возможностью планирования DM-RS на сетке частотно-временных ресурсов с множеством частот в одном и том же временном интервале; и
модуль планирования PT-RS, выполненный с возможностью планирования DM-RS на частотно-временной сетке с множеством временных слотов на одной и той же частоте, причем временные слоты, в которых запланированы DM-RS, зависят от позиции DM-RS.
Перечень сокращений
3GPP – проект партнерства третьего поколения
eNB – усовершенствованный узел B (NodeB)
CRS – опорный сигнал, характерный для соты
DM-RS – опорный сигнал демодуляции
DCI – управляющая информация нисходящей линии связи
LTE – долгосрочное развитие
MIMO – многоканальный вход - многоканальный выход
PT-RS – опорный сигнал отслеживания фазы
RS – опорный сигнал
ТМ – режим передачи
TTI – временной интервал передачи
UE – пользовательское оборудование
URLLC – сверхнадежная связь с малой задержкой
WD – беспроводное устройство
Специалисту в данной области техники очевидно, что описанные в данном документе принципы могут быть реализованы в виде способа, системы обработки данных и/или компьютерного программного продукта. Соответственно, описанные в данном документе принципы могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления или варианта осуществления, объединяющего программный и аппаратный аспекты, в общем, именуемые в данном документе "схемой" или "модулем". Кроме того, изобретение может принимать форму компьютерного программного продукта на материальном компьютерном носителе информации, на котором воплощен компьютерный программный код, который может выполняться компьютером. Можно использовать любой подходящий материальный машиночитаемый носитель, включающий в себя жесткие диски, CD-ROM, электронные запоминающие устройства, оптические запоминающие устройства или магнитные запоминающие устройства.
Некоторые варианты осуществления описаны в данном документе со ссылкой на иллюстрации блок-схем последовательностей операций и/или блок-схем способов, систем и компьютерных программных продуктов. Понятно, что каждый этап, показанный на иллюстрациях блок-схем последовательностей операций и/или блок-схем и комбинаций этапов на иллюстрациях блок-схем последовательностей операций и/или блок-схем, может быть реализован посредством инструкций компьютерной программы. Эти инструкции компьютерной программы могут подаваться в процессор компьютера общего назначения, компьютер специального назначения или другое программируемое устройство обработки данных для создания машины таким образом, чтобы инструкции, которые исполняются посредством процессора компьютера или другого программируемого устройства обработки данных, создавали средство для реализации функций/действий, точно определенных в блок-схеме последовательности операций и/или на этапе или этапах блок-схемы.
Эти инструкции компьютерной программы также могут храниться в машиночитаемой памяти или на носителе информации, чтобы предписывать компьютеру или другому программируемому устройству обработки данных функционировать определенным образом, благодаря чему инструкции, хранящиеся в машиночитаемой памяти, создают изделие, включающее в себя средство инструкций, которое реализует функцию/действие, указанную/ое на этапе или этапах в блок-схемах последовательностей операций или в блоке или блоках блок-схем.
Инструкции компьютерной программы также могут загружаться на компьютер или другое программируемое устройство обработки данных, чтобы предписывать осуществление ряда операционных этапов на компьютере или другом программируемом устройстве для создания реализуемого компьютером процесса, благодаря чему инструкции, которые выполняются на компьютере или другом программируемом устройстве, обеспечивают этапы для осуществления функций/действий, указанных на этапе или этапах в блок-схемах последовательностей операций или в блоке или блоках блок-схем.
Следует понимать, что функции/действия, указанные в блоках, могут осуществляться в порядке, отличном от указанного в операционных иллюстрациях. Например, два блока, показанные в последовательности, могут фактически выполняться по существу одновременно, или блоки иногда могут выполняться в обратном порядке, в зависимости от предусмотренных функций/действий. Хотя некоторые схемы включают в себя стрелки на путях связи для показа основного направления связи, следует понимать, что связь может происходить в направлении, противоположном указанному стрелками.
Компьютерный программный код для осуществления операций описанных в данном документе принципов может быть написан на объектно-ориентированном языке программирования, например, Java® или C++. Однако компьютерный программный код для осуществления операций изобретения также может быть написан на традиционных процедурных языках программирования, например, языке программирования "C". Программный код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как самостоятельный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере. В последнем сценарии, удаленный компьютер может быть подключен к компьютеру пользователя по локальной сети (LAN) или глобальной сети (WAN), или может устанавливаться соединение с внешним компьютером (например, через Интернет с помощью поставщика услуг Интернета).
В данном документе были раскрыты многие разные варианты осуществления, совместно с вышеприведенным описанием и чертежами. Следует понимать, что дословное описание и иллюстрация каждой комбинации и подкомбинации этих вариантов осуществления будет избыточным повторением, затемняющим смысл. Соответственно, все варианты осуществления можно объединять любым способом и/или комбинацией, и настоящее описание изобретения, включающее в себя чертежи, следует рассматривать как образующее полное письменное описание всех комбинаций и подкомбинаций описанных здесь вариантов осуществления, и способа и процесса их создания и использования, и должны поддерживать формулу изобретения любой такой комбинацией или подкомбинацией.
Специалистам в данной области техники будет понятно, что варианты осуществления не ограничены тем, что было конкретно показано и описано в данном документе выше. Кроме того, если не указано обратное, следует отметить, что ни один из прилагаемых чертежей не выполнен в масштабе. Вышеописанные принципы допускают различные модификации и вариации, не выходящие за рамки объема нижеследующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНФИГУРАЦИЯ PT-RS, ЗАВИСЯЩАЯ ОТ ПАРАМЕТРОВ ПЛАНИРОВАНИЯ | 2017 |
|
RU2723669C1 |
| ВЫБОР РЕСУРСОВ ДЛЯ УПРАВЛЯЮЩЕЙ СИГНАЛИЗАЦИИ В СЕТИ РАДИОДОСТУПА | 2017 |
|
RU2742350C1 |
| КОНФИГУРАЦИЯ РЕСУРСА ЗАПРОСА ПЛАНИРОВАНИЯ | 2018 |
|
RU2758075C1 |
| МЕТОДИКА ДЛЯ КОНФИГУРИРОВАНИЯ ОПОРНОГО СИГНАЛА ОТСЛЕЖИВАНИЯ ФАЗЫ | 2018 |
|
RU2754431C1 |
| ОПРЕДЕЛЕНИЕ НАЧАЛЬНЫХ ПОЗИЦИЙ ДЛЯ ПЕРЕДАЧ ПО ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ | 2018 |
|
RU2731743C1 |
| КОНСТРУКЦИЯ ОПОРНОГО СИГНАЛА ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2737391C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ СИГНАЛИЗАЦИИ ОБРАТНОЙ СВЯЗИ | 2018 |
|
RU2745763C1 |
| УПРАВЛЯЕМАЯ ПЛОТНОСТЬ CSI-RS | 2017 |
|
RU2725169C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2635545C2 |
| ФУНКЦИОНИРОВАНИЕ УСТРОЙСТВА ПОЛЬЗОВАТЕЛЯ И ПРИНИМАЮЩЕГО РАДИОУЗЛА НА ОСНОВАНИИ КОДОВОЙ КНИГИ HARQ, СКОНФИГУРИРОВАННОЙ КОНФИГУРИРУЮЩИМ РАДИОУЗЛОМ | 2017 |
|
RU2731123C1 |
Изобретение относится к беспроводной связи. Технический результат изобретения заключается в уменьшении общей фазовой ошибки, вызванной фазовым шумом (CPE), и помех между несущими (ICI), вызванных потерей ортогональности между поднесущими. Способ включает в себя получение информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте и передачу или прием PT-RS в пределах слота, причем позиция PT-RS зависит от позиции во временной области запланированного первого DM-RS. 2 н. и 12 з.п. ф-лы, 18 ил.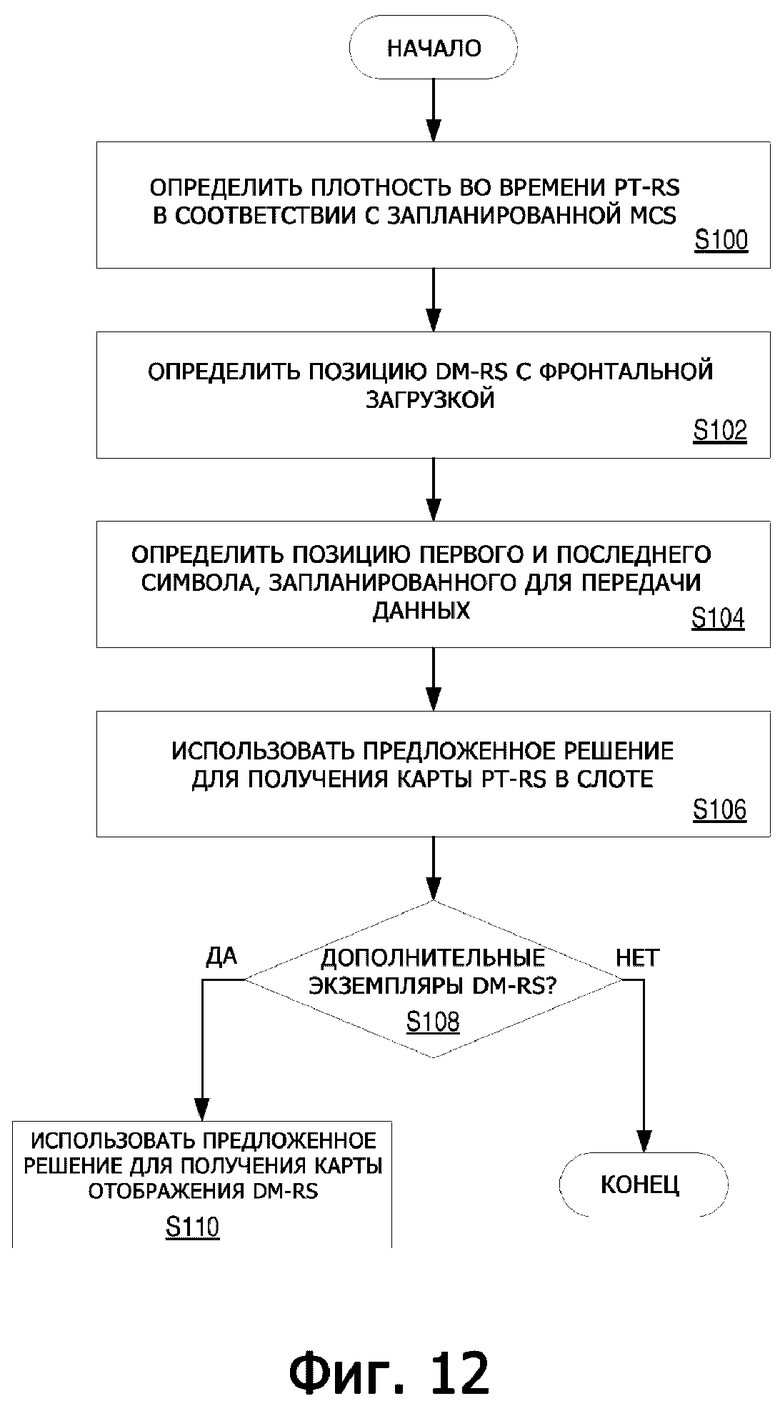
1. Способ, используемый в беспроводном устройстве (14, 16) в системе беспроводной связи, передачи опорного сигнала отслеживания фазы (PT-RS), причем способ содержит этапы, на которых:
получают (S120) информацию о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте;
получают информацию о позиции первого временного символа в слоте, запланированном для передачи данных;
получают информацию о позиции последнего временного символа в слоте, запланированном для передачи данных; и
передают (S122) символы PT-RS в пределах слота, причем позиция символов PT-RS зависит от позиции во временной области запланированного первого DM-RS.
2. Способ по п.1, в котором на этапе получения принимают информацию о позиции или определяют позицию во временной области запланированного первого DM-RS.
3. Способ по п.1 или 2, дополнительно содержащий этапы, на которых:
получают информацию, указывающую запланированную схему модуляции и кодирования (MCS); и
передают PT-RS с плотностью во времени на основе запланированной MCS.
4. Способ по п.4, в котором плотность во времени равна одному значению из: 1, ½ и ¼.
5. Способ по любому из пп.1-4, дополнительно содержащий этап, на котором:
отображают PT-RS на ресурсные элементы (RE) в слоте на основе одного или более из: позиции запланированного первого DM-RS, запланированной MCS, требуемой плотности во времени, позиции первого временного символа, запланированного для передачи данных, и позиции последнего временного символа, запланированного для передачи данных.
6. Способ по любому из пп.1-5, в котором первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают множество поднесущих по частоте и по меньшей мере один временной символ слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и множество временных символов слота по времени.
7. Способ по любому из пп.1-6, в котором физический ресурсный блок (PRB) слота имеет 12 поднесущих в частотной области и 12 или 14 временных символов во временной области.
8. Беспроводное устройство (14, 16) в системе беспроводной связи, выполненной с возможностью передачи или приема опорного сигнала отслеживания фазы (PT-RS), причем беспроводное устройство (14, 16) содержит:
схему (22, 42) обработки, выполненную с возможностью:
получения информации о позиции во временной области запланированного первого опорного сигнала демодуляции (DM-RS) в слоте;
получения информации о позиции первого временного символа в слоте, запланированном для передачи данных;
получения информации о позиции последнего временного символа в слоте, запланированном для передачи данных; и
передачи символов PT-RS в пределах слота, причем позиция символов PT-RS зависит от позиции во временной области запланированного первого DM-RS.
9. Беспроводное устройство (14, 16) по п.8, в котором получение содержит прием и определение информации о позиции во временной области запланированного первого DM-RS.
10 . Беспроводное устройство (14, 16) по п.8 или 9, в котором схема обработки дополнительно выполнена с возможностью:
получения информации, указывающей запланированную схему модуляции и кодирования (MCS); и
передачи PT-RS с плотностью во времени на основе запланированной MCS.
11. Беспроводное устройство (14, 16) по п.10, в котором плотность во времени равна одному значению из: 1, ½ и ¼.
12. Беспроводное устройство (14, 16) по любому из пп.8-11, в котором схема обработки дополнительно выполнена с возможностью:
отображения PT-RS на ресурсные элементы (RE) в слоте на основе одного или более из: позиции запланированного первого DM-RS, запланированной MCS, требуемой плотности во времени, позиции первого временного символа, запланированного для передачи данных, и позиции последнего временного символа, запланированного для передачи данных.
13. Беспроводное устройство (14, 16) по любому из пп.8-12, в котором первый DM-RS запланирован в ресурсных элементах (RE), которые охватывают множество поднесущих по частоте и по меньшей мере один временной символ слота по времени, в то время как PT-RS передается или принимается в RE, которые охватывают по меньшей мере одну поднесущую по частоте и множество временных символов слота по времени.
14. Беспроводное устройство (14, 16) по любому из пп.8-13, в котором физический ресурсный блок (PRB) слота имеет 12 поднесущих в частотной области и 12 или 14 временных символов во временной области.
| MITSUBISHI ELECTRIC: "On phase and frequency tracking for DFTsOFDM", 3GPP DRAFT; R1-1704656-RAN188B-PTRS, 3RD GENERATION PARTNERSHIP PROJECT (3GPP), Mobile Competence Centre; 650, Route Des Lucioles; F-06921 Sophia-Antipolis Cedex; France, 02.04.2017 | |||
| NOKIA et al.: "On PT-RS Design for NR", 3GPP DRAFT; R1-1703182, 3RD GENERATION PARTNERSHIP |

