ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к складывающимся законцовкам крыльев летательных аппаратов и, в частности, к управлению аэродинамическими нагрузками на складывающихся законцовках крыльев летательных аппаратов.
УРОВЕНЬ ТЕХНИКИ
[002] Крупные летательные аппараты имеют больший размах крыла, что позволяет выполнить полет более эффективно. При этом габариты рулежной дорожки и места посадки или высадки в большинстве аэропортов не позволяют беспроблемно эксплуатировать летательные аппараты с таким большим размахом крыла. В связи с этим, в летательных аппаратах с большим размахом крыла обычно используются складывающиеся законцовки крыльев. После посадки законцовки крыльев складывают (вверх, вниз, вперед, назад или сочетанием указанных действий), чтобы уменьшить размах крыла летательного аппарата.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[003] Приведенный в качестве примера способ, раскрытый в настоящем документе, включает определение положения поверхности управления на крыле летательного аппарата. В приведенном в качестве примера способе крыло имеет неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла. Приведенный в качестве примера способ включает определение изменения положения поверхности управления с переходом из первого положения во второе положение для способствования перемещению законцовки крыла, когда летательный аппарат не находится в полете. Приведенный в качестве примера способ также включает перемещение поверхности управления во второе положение и перемещение законцовки крыла между выдвинутым положением и сложенным положением.
[004] Приведенное в качестве примера устройство, раскрытое в настоящем документе, включает в себя процессор, выполненный с возможностью определения, возможно ли перемещение поверхности управления на крыле летательного аппарата из невыгодного положения в выгодное положение на основе закона управления. В приведенном в качестве примера устройстве крыло имеет неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла. Процессор приведенного в качестве примера устройства также выполнен с возможностью выработки инструкции на перемещение поверхности управления в выгодное положение на основании того, возможно ли перемещение поверхности управления. Приведенное в качестве примера устройство также включает в себя первый контроллер, предназначенный для соединения с возможностью связи с первым приводом, соединенным с поверхностью управления. Первый контроллер предназначен для выработки сигнала управления, при получении указанной инструкции, на перемещение поверхности управления из невыгодного положения в выгодное положение. Приведенное в качестве примера устройство также включает в себя контроллер второго привода, предназначенный для соединения с возможностью связи со вторым приводом для перемещения законцовки крыла в соответствии с операцией перемещения законцовки крыла.
[005] Раскрытый в качестве примера летательный аппарат, содержит: крыло, имеющее неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла; поверхность управления на крыле и систему управления летательным аппаратом, выполненную с возможностью определения положения поверхности управления, определения, является ли положение поверхности управления выгодным положением или невыгодным положением для складывания законцовки крыла и, если поверхность управления находится в невыгодном положении, выработки сигнала управления на перемещение поверхности управления в выгодное положение.
[006] Изобретение может включать в себя способ, который может включать определение положения поверхности управления на крыле летательного аппарата, при этом крыло имеет неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла; определение посредством процессора изменения положения поверхности управления с переходом из первого положения во второе положение для способствования перемещению законцовки крыла, когда летательный аппарат не находится в полете; перемещение поверхности управления во второе положение и перемещение законцовки крыла между выдвинутым положением и сложенным положением. Поверхность управления может быть элероном на неподвижной части крыла возле законцовки крыла. Если необходимо переместить законцовку крыла из выдвинутого положения в сложенное положение, вторым положением элерона является обтекаемое положение или положение, в котором задняя кромка направлена вниз. Поверхность управления при нахождении во втором положении направляет меньше воздуха по направлению к законцовке крыла, чем при нахождении в первом положении. Способ также может включать определение посредством процессора скорости летательного аппарата и предотвращение указанного определения изменения и указанного перемещения поверхности управления, если скорость больше скорости срабатывания. Способ также может включать определение посредством процессора, не будет ли перемещение поверхности управления во второе положение противоречить команде пилота; и перемещение поверхности управления во второе положение, если команда пилота является командой управления аэродинамическим тормозом, или предотвращение перемещения поверхности управления во второе положение, если команда пилота является командой на выполнение крена. Поверхность управления может быть первой поверхностью управления, а способ также включает: определение положения второй поверхности управления на неподвижной части крыла; определение, посредством процессора, изменения положения второй поверхности управления с переходом из третьего положения в четвертое положение для способствования перемещению законцовки крыла, когда летательный аппарат не находится в полете; и перемещение второй поверхности управления в третье положение. Первая поверхность управления может быть элероном, а вторая поверхность управления может быть предкрылком передней кромки.
[007] Изобретение может включать в себя устройство, которое может содержать:
- процессор, выполненный с возможностью:
определения, возможно ли перемещение поверхности управления на крыле летательного аппарата из невыгодного положения в выгодное положение на основе закона управления, при этом крыло имеет неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла; и
выработки инструкции на перемещение поверхности управления в выгодное положение на основании того, возможно ли перемещение поверхности управления;
- первый контроллер, предназначенный для соединения с возможностью связи с первым приводом, при этом первый привод соединен с поверхностью управления, а первый контроллер выполнен с возможностью выработки сигнала управления, при получении указанной инструкции, на перемещение поверхности управления из невыгодного положения в выгодное положение; и
- второй контроллер, предназначенный для соединения с возможностью связи со вторым приводом для перемещения законцовки крыла в соответствии с операцией перемещения законцовки крыла.
Закон управления может быть основан на скорости летательного аппарата, и, для определения, возможно ли перемещение поверхности управления, процессор выполнен с возможностью определения скорости летательного аппарата; сравнения этой скорости со скоростью срабатывания и отправки указанной инструкции в первый контроллер, если указанная скорость меньше скорости срабатывания, или предотвращения перемещения поверхности управления в выгодное положение, если указанная скорость больше скорости срабатывания. Закон управления может быть основан на команде пилота, причем, если команда пилота является симметричной командой, процессор настроен на отправку указанной инструкции на первый контроллер, или если команда пилота является асимметричной командой, процессор настроен на предотвращение перемещения поверхности управления в выгодное положение. Операция перемещения законцовки крыла может быть переводом из выдвинутого положения в сложенное положение. Поверхность управления при нахождении в выгодном положении направляет меньше воздуха по направлению к законцовке крыла, чем при нахождении в невыгодном положении. Поверхность управления может быть предкрылком передней кромки. Выгодным положением предкрылка передней кромки является развернутое положение.
[008] Изобретение может включать в себя летательный аппарат, который может содержать крыло, имеющее неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла; поверхность управления на крыле и систему управления летательным аппаратом, выполненную с возможностью: определения положения поверхности управления; определения, является ли положение поверхности управления выгодным положением или невыгодным положением для складывания законцовки крыла; и если поверхность управления находится в невыгодном положении, выработки сигнала управления на перемещение поверхности управления в выгодное положение. Поверхность управления может быть элероном на неподвижной части крыла возле законцовки крыла. Невыгодным положением может быть положение, в котором задняя кромка элерона направлена вверх, а выгодным положением является обтекаемое положение элерона или положение элерона, в котором его задняя кромка направлена вниз. Поверхность управления является обычным элероном на законцовке крыла. Невыгодным положением может быть положение, в котором задняя кромка элерона направлена вверх, а выгодным положением является обтекаемое положение элерона или положение элерона, в котором его задняя кромка направлена вниз.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] На ФИГ. 1 показан пример летательного аппарата, который может быть использован для реализации приведенных в качестве примера способов, систем и устройств, раскрытых в настоящем документе.
[0010] На ФИГ. 2 показаны примеры поверхностей управления, развернутых на крыле приведенного в качестве примера летательного аппарата по ФИГ. 1 во время аэродинамического торможения при совершении посадки.
[0011] На ФИГ. 3 показан вид сверху приведенного в качестве примера крыла по ФИГ. 2 с показом примерного воздушного потока поверх крыла при переводе приведенной в качестве примера законцовки крыла из выдвинутого положения в сложенное положение.
[0012] На ФИГ. 4 показана блок-схема примера системы управления летательным аппаратом, которая может быть реализована приведенным в качестве примера летательным аппаратом по ФИГ. 1.
[0013] На ФИГ. 5 проиллюстрированы примеры поверхностей управления на приведенном в качестве примера крыле примера летательного аппарата, приведенного на ФИГ. 1, в более выгодном положении для складывания приведенной в качестве примера законцовки крыла.
[0014] На ФИГ. 6 показан вид сверху примера крыла, приведенного на ФИГ. 5 с показом примерного воздушного потока поверх крыла при переводе приведенной в качестве примера законцовки крыла из выдвинутого положения в сложенное положение.
[0015] На ФИГ. 7А показан пример законцовки крыла приведенного в качестве примера летательного аппарата по ФИГ. 1, имеющего приведенный в качестве примера элерон законцовки крыльев в положении, в котором задняя кромка направлена вверх.
[0016] На ФИГ. 7В проиллюстрированы примеры законцовки крыла по ФИГ. 7В с приведенным в качестве примера элероном законцовки крыльев в положении, в котором задняя кромка направлена вниз.
[0017] На ФИГ. 8 показана структурная схема приведенного в качестве примера способа или процесса, который может быть реализован приведенной в качестве примера системой управления летательным аппаратом по ФИГ. 4.
[0018] На ФИГ. 9 показана блок-схема приведенной в качестве примера процессорной платформы, выполненной с возможностью исполнения машиночитаемых инструкций для реализации по меньшей мере части примера способа, приведенного на ФИГ. 8.
[0019] Некоторые примеры показаны на указанных выше фигурах чертежей и подробно описаны ниже. При описании этих примеров для обозначения одинаковых или аналогичных элементов используются одинаковые или идентичные ссылочные номера. Фигуры чертежей не обязательно выполнены в масштабе, и некоторые признаки и некоторые виды на чертежах могут быть показаны в увеличенном масштабе или схематично для ясности и/или краткости. Кроме того, в данном описании были описаны некоторые примеры. Любые признаки из любого примера могут быть включены наряду с другими признаками других примеров, замещены ими, или иным образом сочетаться с другими признаками других примеров.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0020] Устройство и способы, раскрытые в настоящем документе и приведенные в качестве примера, обеспечивают управление аэродинамическими нагрузками, действующими на складывающиеся законцовки крыльев летательных аппаратов, посредством перемещения одной или более поверхности (поверхностей) управления на крыльях в более выгодное положение (выгодные положения), что позволяет получить большие или меньшие аэродинамические нагрузки на законцовках крыльев перед переводом законцовок крыльев между выдвинутым положением в сложенное положение. Примеры, раскрытые в настоящем документе, обеспечивают возможность использования более компактных и легких приводных систем законцовок крыльев, что приводит к уменьшению веса крыльев и уменьшению пространства, необходимого для размещения приводных систем законцовок крыльев в крыльях летательного аппарата. В результате, крылья могут быть выполнены более тонкими и легкими, а благодаря этому полет может быть выполнен более эффективно.
[0021] Перед подробным раскрытием предлагаемых систем управления летательным аппаратом и способов приведено краткое вводное описание складывающихся законцовок крыльев. Общеизвестно, что более длинные, легкие и/или тонкие крылья аэродинамически более эффективны, чем короткие и тяжелые крылья. Кроме того, большее удлинение крыльев позволяет выполнить полет более эффективно, чем малое удлинение крыльев. Удлинением крыла является отношение его длины к его ширине (хорде). В связи с этим желательно использовать более длинные и узкие крылья, поскольку они позволяют более эффективно выполнить полет (например, со сниженным расходом топлива). Однако существующие аэропорты оказываются проблематичными для летательных аппаратов, имеющих относительно большой размах крыла (например, расстояние между концами или законцовками крыльев). Конструкции аэропортов основаны на кодах А-F Международной организации гражданской авиации (ИКАО), которые устанавливают размерные ограничения на размах крыла, шасси, ширину, длину и т.д. Большинство аэропортов выполнены так, чтобы вмещать летательные аппараты, имеющих размеры согласно коду Е ИКАО включительно, который ограничивает размах крыла до 65 метров, так чтобы летательные аппараты могли поместиться на взлетно-посадочных полосах, рулежных дорожках, местах посадки или высадки и т.д. В связи с этим, летательные аппараты с большим размахом крыла (например, более 65 метров) используют складывающиеся законцовки крыльев, что позволяет уменьшить размах крыла летательного аппарата, так чтобы летательные аппараты могли соответствовать существующей инфраструктуре аэропорта (например, местам стоянки, рулежным дорожкам и т.д.).
[0022] В отношении летательного аппарата, имеющего складывающиеся законцовки крыльев, каждое крыло летательного аппарата включает в себя расположенную ближе к борту или неподвижную часть крыла (например, секцию) и подвижную или неподвижную внешнюю часть крыла, то есть законцовку крыла, которая соединена с возможностью перемещения с неподвижной частью крыла. В частности, законцовки крыльев соединены с возможностью поворота с соответствующими неподвижными частями крыльев с помощью шарниров. Для перемещения или перевода законцовок крыльев из выдвинутого положения (например, развернутого положения, полетного положения, несложенного положения и т.д.) в сложенное положение (например, убранное положение, положение хранения и т.д.), летательный аппарат содержит приводные системы для раскладывания законцовок крыльев. Приводные системы содержат один или более приводов, расположенных между неподвижными частями крыльев и законцовками крыльев. Приводы перемещают (например, поднимают, переводят, поворачивают и т.д.) законцовки крыльев вокруг их соответствующих шарниров из выдвинутого положения в сложенное положение.
[0023] Как указанно выше, крылья летательного аппарата обычно стараются выполнить максимально тонкими и легкими. Тем не менее, на толщину и вес крыла очень влияют системы, компоненты и т.д., расположенные на/в крыле, например, компоненты приводных систем для раскладывания законцовок крыльев, включая приводы, гидравлические линии и т.д. В частности, крылья могут быть выполнены достаточно толстыми, чтобы вмещать привод (приводы), гидравлическую линию (гидравлические линии) и т.д. приводных систем для раскладывания законцовок крыльев, что приводит к утяжелению крыльев. В целом, внешние нагрузки, действующие на приводную систему раскладывания законцовок крыльев, включают в себя три основных компонента: вес законцовки крыла; динамическое влияние перемещения массы законцовки крыла и аэродинамические нагрузки (например, аэродинамические силы), действующие на законцовку крыла. Размеры приводных систем для раскладывания законцовок крыльев выбраны на основе мощности, необходимой для подъема законцовок крыльев с противодействием этим (и/или другим) неблагоприятным силам.
[0024] В настоящем документе раскрыты и приведены в качестве примера устройство и способы использования поверхностей управления на крыльях летательного аппарата возле законцовок крыльев для управления аэродинамическими нагрузками и результирующими шарнирными моментами на законцовках крыльев перед переводом законцовок крыльев между выдвинутым и сложенным положениями. В некоторых примерах устройство и способы обеспечивают уменьшение аэродинамических нагрузок на законцовках крыльев перед складыванием законцовок крыльев, благодаря чему уменьшается приводная мощность или сила, необходимая для складывания законцовок крыльев. Примеры, раскрытые в настоящем документе, могут быть использованы для перемещения (например, перевода, отклонения) одной или более поверхности (поверхностей) управления, таких как элерон (элероны), предкрылок (предкрылки) и т.д., возле законцовок крыльев (и/или на законцовках) в более выгодное положение (выгодные положения), в которых минимизируются отрицательные аэродинамические нагрузки (и, таким образом, результирующие шарнирные моменты), развиваемые на складывающихся законцовках крыльев. В результате, на законцовки крыльев воздействуют уменьшенные аэродинамические нагрузки или силы (например, отрицательный шарнирный момент), когда законцовки крыльев переводят из выдвинутого положения в сложенное положение. С другой стороны, приведенные в качестве примеров устройство и способы, раскрытые в настоящем документе, могут быть использованы для увеличения аэродинамических нагрузок и/или результирующего шарнирного момента на законцовках крыльев перед перемещением законцовок крыльев из сложенного положения в выдвинутое положение, благодаря чему производится толкание законцовок крыльев вниз по направлению к выдвинутому положению. В некоторых примерах реализуются один или более законов управления (например, проверки, запреты) на основании входных сигналов, таких как скорость относительно земли, вес на колесах и т.д., чтобы гарантировать вызов команды (команд) для поверхностей управления только в соответствующие моменты времени.
[0025] Например, в летательном аппарате используется множество поверхностей управления (например, аэродинамических поверхностей, поверхностей управления полетом и т.д.) для управления летательным аппаратом во время полета. Поверхности управления могут включать в себя, например, элероны, предкрылки, флапероны и т.д. На земле поверхности управления могут быть использованы для увеличения лобового сопротивления при торможении (например, остановке), уменьшения подъемной силы для увеличения веса на колесах, удержания уровня летательного аппарата во время взлетов и посадок при боковых ветрах и т.д. При посадке некоторые из поверхностей управления разворачивают или перемещают в определенные положения для увеличения лобового сопротивления и/или уменьшения подъемной силы. Однако в некоторых случаях конкретные положения или ориентации поверхности (поверхностей) управления приводят к направлению воздушного потока к законцовкам крыльев и/или иным образом обеспечивают увеличение мощности, необходимой для перемещения законцовок крыльев в сложенное положение (например, путем создания отрицательного момента относительно шарниров). В результате, приводным системам нужна большая сила для раскладывания законцовок крыльев, чтобы противодействовать этой силе и выполнить перемещение законцовок крыльев в сложенное положение. Большие силы, как правило, приходится компенсировать более крупными и более тяжелыми приводными системами. Вместо этого, приведенные в качестве примера системы управления летательным аппаратом и способы, раскрытые в настоящем документе, определяют, находятся ли одна или более поверхности (поверхностей) управления в таком отрицательном или невыгодном положении (невыгодных положениях) и в положительном случае выдают команду (команды) на перемещение поверхности (поверхностей) управления в другие, более выгодные положения, которые приводят к уменьшению отрицательных аэродинамических нагрузок на законцовках крыльев.
[0026] Например, элероны возле складывающихся законцовок крыльев, как правило, ориентированы так, что задняя кромка при посадке направлена вверх, что повышает эффективность торможения за счет увеличения лобового сопротивления и увеличения веса на колесах. Однако для стреловидных крыльев наличие элеронов в положениях, в которых задние кромки направлены вверх, приводит к воздушному потоку, направляемому по крылу, (например, с сужением) к законцовкам крыльев. Когда законцовки крыльев переводят в сложенное положение, увеличенный воздушный поток по направлению к законцовкам крыльев создает большой отрицательный шарнирный момент, который необходимо преодолеть с помощью приводных систем законцовок крыльев. В результате, для перемещения законцовок крыльев требуется увеличение мощности. Поэтому, вместо того чтобы оставлять элероны в этих невыгодных положениях, приведенные в качестве примера устройство и способы управления летательным аппаратом, раскрытые в настоящем документе, реализуют один или более законов управления, которые определяют, безопасно ли проводить регулировку положений элеронов (например, на основании скорости относительно земли, сигналов, вводимых пилотом, и т.д.) и если да, перемещают элероны в выгодные положения, такие как обтекаемое положение (например, нейтральное положение) или положение, в котором задняя кромка направлена вниз. В обтекаемом положении или положении, в котором задняя кромка направлена вниз, воздух, протекающий от борта наружу поверх крыла, не направляется с сужением к законцовке крыла. В результате этого значительно уменьшаются отрицательные аэродинамические нагрузки (а, следовательно, результирующий шарнирный момент) на законцовках крыльев при складывании законцовки крыла по сравнению с аэродинамическими нагрузками, получаемыми в положении, в котором задняя кромка направлена вверх.
[0027] Дополнительно или еще в одном варианте реализации изобретения, в некоторых примерах другие поверхности управления могут быть перемещены в положение, которое приводит к уменьшению отрицательных аэродинамических нагрузок на законцовках крыльев, или могут удерживаться в этом положении. Например, поверхности управления на передней кромке крыла, такие как предкрылок передней кромки, щиток Крюгера, имеющий переменную кривизну, простой щиток Крюгера и т.д., направляют воздушный поток в сторону от складывающейся законцовки крыла и/или могут быть размещены для направления воздушного потока благоприятным образом (например, путем создания положительной подъемной силы возле законцовки крыла, приводя, таким образом, к уменьшению отрицательного шарнирного момента, противодействующего подъему законцовки крыла) для перемещения законцовки крыла.
[0028] В некоторых примерах поверхности управления на передней кромке, такие как предкрылки, находятся в наиболее выгодном положении во время посадки. Однако после посадки пилот может выполнять операцию по уборке механизации, которая вызывает отведение передней кромки поверхности управления. Приведенные в качестве примера устройство и способы управления летательным аппаратом, раскрытые в настоящем документе, могут приостановить или запретить выполнение этих команд и предотвратить отведение передней кромки поверхности управления, сохраняя благодаря этому переднюю кромку поверхности управления в наиболее выгодном положении для подъема законцовок крыльев.
[0029] И наоборот, при опускании законцовок крыльев перед полетом, приведенные в качестве примера устройство и способы управления летательным аппаратом, раскрытые в настоящем документе, могут использовать одну или более поверхностей управления на крыльях для направления воздушного потока к законцовкам крыльев, увеличивая благодаря этому аэродинамические нагрузки и способствуя опусканию законцовок крыльев. Иными словами, приведенные в качестве примеров системы и способы, раскрытые в настоящем документе, могут быть реализованы для перенаправления воздушного потока на законцовки крыльев и/или иным образом создания отрицательного шарнирного момента (например, момента в направлении выпуска) с использованием положения соседней поверхности управления.
[0030] При сниженных требованиях к мощности для приводных систем раскладывания законцовок крыльев, соединенные с ними приводы законцовок крыльев, гидравлические линии и т.д. могут быть выполнены имеющими размеры, для которых требуется меньше мощности. Таким образом, могут быть использованы маленькие (например, более компактные) и более легкие приводные системы. В результате этого уменьшается пространство, необходимое для размещения приводных систем, и значительно уменьшается утяжеление крыла приводными системами. Таким образом, общая эффективность летательного аппарата может быть увеличена за счет использования более компактных и легких приводных систем законцовок крыльев.
[0031] На ФИГ. 1 показан пример летательного аппарата 100, в котором могут быть реализованы примеры, раскрытые в настоящем документе. В проиллюстрированном примере летательный аппарат 100 включает в себя фюзеляж 102, первое или левое крыло 104, соединенное с фюзеляжем 102, и второе или правое крыло 106, соединенное с фюзеляжем 102. Первое и второе крылья 104, 106 несут соответствующие двигатели 108. В проиллюстрированном примере первое и второе крылья 104, 106 включают в себя законцовки крыльев, которые могут быть переведены из выдвинутого или полетного положения (как показано положением на ФИГ. 1) в убранное или сложенное положение, чтобы уменьшить размах 109 крыла летательного аппарата 100. В частности, первое крыло 104 включает в себя неподвижную часть 110 первого крыла (например, расположенную ближе к борту часть крыла) и законцовку 112 первого крыла (например, неподвижную часть, внешнюю часть крыла). Законцовка 112 первого крыла шарнирно соединена с неподвижной частью 110 первого крыла и поворачивается или складывается вверх вокруг оси шарнира для перемещения между выдвинутым положением и сложенным положением. Аналогичным образом, второе крыло 106 включает в себя неподвижную часть 114 второго крыла и законцовку 116 второго крыла, которая шарнирно соединена с неподвижной частью 114 второго крыла. Законцовки 112, 116 первого и второго крыльев приводятся в действие соответствующими приводами законцовок крыльев (как далее раскрыто более подробно) для перемещения или перевода законцовок 112, 116 первого и второго крыльев между выдвинутым положением, как показано на ФИГ. 1, и сложенным положением, в котором законцовки 112, 116 первого и второго крыльев повернуты вверх. В некоторых примерах законцовки 112, 116 первого и второго крыльев имеют длину примерно 10 футов (3 м). По существу, размах 109 крыла может быть уменьшен примерно на 20 футов (6 м) посредством складывания законцовок 112, 116 первого и второго крыльев. При их нахождении в сложенном положении летательный аппарат 100 может соответствовать размерным ограничениям согласно коду Е ИКАО (например, до 65 метров), например. В других примерах неподвижные части 110, 114 первого и второго крыльев, и/или законцовки 112, 116 первого и второго крыльев могут быть длиннее или короче, а законцовка крыла может быть сложена вверх, вниз, вперед, назад или сочетанием указанного.
[0032] В проиллюстрированном примере первое и второе крылья 104, 106 приведенного в качестве примера летательного аппарата 100 несут множество поверхностей управления (например, основных и вспомогательных аэродинамических поверхностей и т.д.), расположенных на первом и втором крыльях 104, 106 (например, вдоль передней и задней кромок первого и второго крыльев 104, 106). Поверхности управления могут быть расположены или выдвинуты для изменения аэродинамической подъемной силы летательного аппарата 100 во время взлета или посадки, например. В проиллюстрированном примере первое крыло 104 включает в себя первый элерон 118 и первый флаперон 120, расположенные вдоль задней кромки 122 первого крыла 104. В некоторых примерах первое крыло 104 может включать в себя множество элеронов и/или множество флаперонов. В проиллюстрированном примере первое крыло 104 также включает в себя множество предкрылков 124 передней кромки вдоль передней кромки 126 первого крыла 104. В проиллюстрированном примере первое крыло 104 включает в себя семь (7) предкрылков 124 передней кромки. Однако в других примерах первое крыло 104 может включать в себя большее или меньшее количество предкрылков 124 передней кромки. Чтобы способствовать замедлению летательного аппарата 100, первое крыло 104 также может включать в себя первое множество интерцепторов 128, расположенных на верхней поверхности первого крыла 104. Аналогичным образом, второе крыло 106 включает в себя второй элерон 130 и второй флаперон 132, расположенные вдоль задней кромки 134, второе множество предкрылков 136 передней кромки вдоль передней кромки 138 и второе множество интерцепторов 140 на верхней поверхности второго крыла 106. В других примерах первое крыло 104 и/или второе крыло 106 может включать в себя большее или меньшее количество поверхностей управления (например, элероны, флапероны, интерцепторы, триммеры, предкрылки передней кромки, предкрылки задней кромки и т.д.).
[0033] В проиллюстрированном примере размах 109 крыла между законцовками 112, 116 первого и второго крыльев, находящимися в выдвинутом или полетном положении, относительно большой. Для уменьшения размаха 109 крыла (например, после посадки перед рулением к месту посадки или высадки и т.д.), законцовки 112, 116 первого и второго крыльев могут быть перемещены в сложенное положение. Первое крыло 104 включает в себя привод 142 законцовки первого крыла для перевода законцовки 112 первого крыла между выдвинутым положением и сложенным положением. Второе крыло 106 включает в себя привод 144 законцовки второго крыла для перевода законцовки 116 второго крыла между выдвинутым положением и сложенным положением. Приводы 142, 144 законцовок первого и второго крыльев могут быть гидравлическими приводами, например.
[0034] Во время посадки обычно выполняют команду на торможение или гашение скорости (например, выдаваемую пилотом), что приводит к воздействию на одну или более поверхностей управления на крыльях 104, 106 для перемещения в определенные положения, чтобы способствовать замедлению летательного аппарата 100.
[0035] На ФИГ. 2 приведен пример поверхности управления на первом крыле 104 с показом положения во время посадки. В проиллюстрированном примере, например, привод 200 элерона перемещает первый элерон 118 в положение, в котором задняя кромка направлена вверх. Аналогично, привод 202 предкрылка показан в положении для развертывания первого или внешнего предкрылка из предкрылков 124 передней кромки. Другие предкрылки 124 передней кромки могут быть аналогичным образом развернуты. В некоторых примерах привод 202 предкрылка приводит в действие или управляет множеством предкрылков 124 передней кромки вдоль передней кромки 126 первого крыла 104. Дополнительно, выдвигают флаперон 120 из задней кромки 122, и интерцепторы 128 поднимаются. Интерцепторы 128 и флаперон 120 могут включать в себя приводы, сходные с приводом 200 элерона и/или привода 202 предкрылка. Конфигурация поверхности управления, проиллюстрированная на ФИГ. 2, увеличивает лобовое сопротивление и/или увеличивает вес на колесах летательного аппарата 100, что способствует замедлению летательного аппарата 100. Однако положение (положения) одной или более поверхности (поверхностей) управления часто приводит к созданию сил или аэродинамических нагрузок, которые противодействуют или увеличивают силу, необходимую для подъема законцовки 112 первого крыла.
[0036] На ФИГ. 3 показан вид сверху конца первого крыла 104, когда поверхности управления развернуты во время аэродинамического торможения, как на ФИГ. 2. Как проиллюстрировано на чертежах, встречный воздушный поток 300 направляется первым элероном 118 наружу (например, от борта наружу), к законцовке 112 первого крыла. Иными словами, первый элерон 118 направляет с сужением или перенаправляет воздушный поток 300, проходящий поверх первого крыла 104, по направлению к законцовке 112 первого крыла, создавая за счет этого отрицательный шарнирный момент вокруг оси 302 шарнира. В результате, приводу 142 законцовки первого крыла нужно больше мощности для подъема законцовки 112 первого крыла из выдвинутого положения (показано пунктирными линиями) в сложенное или убранное положение для преодоления отрицательного шарнирного момента (например, противодействующей силы), возникающего от воздушного потока 300.
[0037] На ФИГ. 4 показан пример устройства или системы 400 управления летательным аппаратом, которая может быть реализована посредством приведенного в качестве примера летательного аппарата 100 по ФИГ. 1 в соответствии с идеями настоящего раскрытия. Приведенная в качестве примера система 400 может быть использована для перемещения одной или более поверхностей управления первого и второго крыльев 104, 106 в положения, которые приводят к увеличению и/или уменьшению аэродинамических нагрузок на законцовках первого и второго крыльев 104, 106 и, таким образом, минимизируют величину приводной силы, необходимой для подъема законцовок 112, 116 первого и второго крыльев. В проиллюстрированном примере система 400 включает в себя контроллер 402 привода поверхности управления, который может быть реализован в виде множества контроллеров. Контроллер (контроллеры) 402 привода поверхности управления управляет одним или более приводами 404а-n поверхности управления (например, посредством сигналов управления). Привод (приводы) 404а-n поверхности управления соответствует (соответствуют) одному приводу или более приводам, которые перемещают различные поверхности управления на летательном аппарате 100. Например, первый привод 404а поверхности управления может соответствовать приводу 200 элерона (ФИГ. 2), который перемещает первый элерон 118, привод 404b второй поверхности управления может соответствовать приводу 202 предкрылка (ФИГ. 2), который перемещает первый или внешний предкрылок из предкрылков 124 передней кромки и т.д.
[0038] В проиллюстрированном примере система 400 включает в себя контроллер 406 приводов законцовок крыльев, который может быть реализован в виде множества контроллеров. Контроллер (контроллеры) 406 законцовок крыльев управляет приводом 408а законцовки первого крыла и/или приводом 408b законцовки второго крыла. Привод 408а законцовки первого крыла может соответствовать, например, приводу 142 законцовки первого крыла (ФИГ. 1 и 3), который перемещает законцовку 112 первого крыла между выдвинутым и сложенным положениями. Аналогичным образом, привод 408b законцовки второго крыла может соответствовать приводу 144 законцовки второго крыла (ФИГ. 1), который перемещает законцовку 116 второго крыла между выдвинутым и сложенным положениями. В некоторых примерах привод 408а законцовки первого крыла и/или привод 408b законцовки второго крыла включают или включает в себя множество приводов (например, привод 142 законцовки первого крыла может включать в себя два привода, которые оказывают влияние на законцовку 112 первого крыла).
[0039] В проиллюстрированном примере система 400 включает в себя процессор 410 и базу данных 412. Процессор 410 может определить, в каком положении находится (находятся) поверхность (поверхности) управления и может (могут) ли эта поверхность (эти поверхности) управления быть перемещена (перемещены) в более выгодное положение (выгодные положения) перед складыванием законцовок 112, 116 первого и второго крыльев. В некоторых примерах процессор 410 и/или база данных 412 может реализовывать один или большее количество законов управления (как более подробно раскрыто в данном документе), основанный (основанные) на одном или более входных сигналах для определения, возможно ли перемещение поверхности (поверхностей) управления.
[0040] При получении инструкции на выполнение операции складывания законцовки крыла (для перемещения законцовок 112, 116 первого и второго крыльев из выдвинутого положения в сложенное положение), которая может быть выдана автоматически или посредством команды пилота, приведенный в качестве примера процессор 410 определяет текущее положение (текущие положения) одной или более поверхности (поверхностей) управления, которая (которые) может (могут) оказывать влияние на аэродинамические нагрузки на законцовках крыла 112, 116. В некоторых примерах база данных 412 включает в себя перечень (например, определение) поверхности (поверхностей) управления, оказывающих влияние на аэродинамические нагрузки на законцовках 112, 116 крыльев (например, первый элерон 118, первый предкрылок 124 передней кромки и т.д.). В некоторых примерах только поверхности управления смежных законцовок 112, 116 первого и второго крыльев (например, первый элерон 118, внешний предкрылок из предкрылков 124 передней кромки на первом крыле 104, второй элерон 130 и один из внешних предкрылков 124 передней кромки на втором крыле 106) обозначены в качестве поверхностей управления, подлежащих перемещению. В других примерах может быть обозначено большее или меньшее количество поверхностей управления. В проиллюстрированном примере процессор 410 принимает данные соответствующие положению (положениям) поверхности (поверхностей) управления от контроллера (контроллеров) 402 привода поверхности управления.
[0041] После определения процессором 410 положения (положений) поверхности (поверхностей) управления, процессор 410 определяет, находится ли поверхность (поверхности) управления в выгодном положении или невыгодном положении для складывания законцовки 112 первого крыла. При складывании законцовки крыла, например, невыгодным положением является положение, в котором поверхность управления создает максимальный воздушный поток или относительно большую часть воздушного потока, направленного к законцовке крыла, и/или каким-либо иным образом создает силу (например, отрицательный шарнирный момент) в противоположном направлении, в котором законцовка крыла должна быть сложена, по сравнению с другими положениями поверхности управления. Выгодным положением, с другой стороны, является положение, в котором поверхность управления создает минимальную или меньшую аэродинамическую нагрузку на законцовку крыла и/или каким-либо иным образом не вносит вклада в создание силы в противоположном направлении по сравнению с другими положениями поверхности управления. Если поверхность управления находится, например, в невыгодном положении процессор 410 определяет изменение положения поверхности управления с переходом из первого положения (например, невыгодного положения) во второе положение (например, выгодное положение) для способствования перемещению законцовки крыла (например, из выдвинутого положения в сложенное положение, из сложенного положения в выдвинутое положение), когда летательный аппарат 100 находится на земле (например, не в полете). Например, невыгодным положением для первого элерона 118 может быть положение, в котором задняя кромка направлена вверх, как показано на ФИГ. 2 и 3, что создает аэродинамические нагрузки на законцовку 112 первого крыла путем направления воздушного потока 300 к законцовке 112 первого крыла. Выгодным положением для первого элерона 118, с другой стороны, может быть обтекаемое положение или положение, в котором задняя кромка направлена вниз, что создает меньшую аэродинамическую нагрузку на законцовку 112 первого крыла, чем при нахождении в невыгодном положении. Если поверхность управления находится в невыгодном положении, процессор 410 вырабатывает инструкцию на перемещение соответствующей поверхности управления в выгодное положение. На основе этой инструкции контроллер (контроллеры) 402 привода поверхности управления может (могут) вырабатывать один сигнал или большее количество сигналов управления для приведения в действие соответствующего привода (соответствующих приводов) 404а-n поверхности управления для перемещения соответствующей поверхности управления в выгодное положение. В некоторых примерах может быть множество невыгодных положений и/или множество выгодных положений для поверхности (поверхностей) управления, которые могут быть сохранены, например, в базе данных 412.
[0042] На ФИГ. 5 показан первый элерон 118 на первом крыле 104 в положении, в котором задняя кромка направлена вниз. Если первый элерон 118 находится в невыгодном положении для складывания законцовки 112 первого крыла, таком как показанное на ФИГ. 2 и 3 положение, в котором задняя кромка направлена вверх, контроллер (контроллеры) 402 привода поверхности управления может (могут) отправить сигнал управления на привод 404а поверхности управления для первого элерона 118 (например, привод 200 элерона) для перемещения первого элерона 118 в выгодное положение, такое как показанное на ФИГ. 5 положение, в котором задняя кромка направлена вниз. На ФИГ. 6 показан вид сверху конца первого крыла 104 с первым элероном 118 в положении, в котором задняя кромка направлена вниз. Как проиллюстрировано на чертежах, воздушный поток 600 проходит поверх первого крыла 104 и не перенаправлется к законцовке 112 первого крыла, как было показано на ФИГ. 3, в невыгодном положении. Таким образом, приведенная в качестве примера система 400 минимизирует аэродинамическую нагрузку на законцовку 112 первого крыла посредством перемещения первого элерона 118 из невыгодного положения (например, положения, в котором задняя кромка направлена вверх) в выгодное положение (например, положение, в котором задняя кромка направлена вниз).
[0043] Дополнительно или еще в одном варианте реализации изобретения, в некоторых примерах один или несколько предкрылков 124 передней кромки могут быть перемещены из невыгодного положения в выгодное положение, которое минимизирует воздушный поток по направлению к законцовке 112 первого крыла. В некоторых примерах внешний предкрылок из предкрылков 124 передней кромки (показано на ФИГ. 5 и 6) создает больше подъемной силы возле конца первого крыла 104, когда предкрылок 124 передней кромки находится в развернутом или выдвинутом положении, как показано на ФИГ. 5. Иными словами, в развернутом положении внешний предкрылок 124 передней кромки уменьшает отрицательный шарнирный момент на законцовке 112 первого крыла. Таким образом, выдвинутое положение внешнего предкрылка 124 передней кромки может быть выгодным положением, а неразвернутое или убранное положение внешнего предкрылка 124 передней кромки может быть невыгодным положением. Процессор 410 может определить положение внешнего предкрылка 124 передней кромки (например, на основании сигнала контроллера (контроллеров) 402 привода поверхности управления) и, если внешний предкрылок 124 передней кромки не находится в выгодном положении, процессор 410 может вырабатывать инструкцию на перемещение внешнего предкрылка 124 передней кромки в выгодное положение. Контроллер (контроллеры) 402 привода поверхности управления может (могут) вырабатывать один сигнал или большее количество сигналов управления на приведение в действие привода (приводов) 404а-n поверхности управления (например, привода 202 предкрылка) для перемещения внешнего предкрылка 124 передней кромки в выгодное положение (например, развернутое положение, как показано на ФИГ. 5). Этот процесс может быть повторен для множества поверхностей управления. В некоторых примерах только некоторые или назначенные поверхности управления оказывают влияние на аэродинамическую нагрузку на законцовку 112 первого крыла, а другие поверхности управления (например, расположенные ближе к борту предкрылки 124 передней кромки, флаперон 120, первое множество интерцепторов 128 и т.д.) не могут оказывать влияния на аэродинамическую нагрузку. В некоторых примерах все из заданных поверхностей управления являются активными или перемещаются одновременно. После перемещения одной или более поверхностей управления в свое выгодное положение (выгодные положения) или определения их нахождения в своем выгодном положении (своих выгодных положениях), процессор 410 может выдавать инструкцию на контроллер 406 приводов законцовок крыльев, который управляет приводом 408а законцовок крыльев (например, приводом 142 законцовки первого крыла) для перевода (например, перемещения) законцовки 112 первого крыла между выдвинутым положением (показано пунктирными линиями) и сложенным или убранным положением, как показано на ФИГ. 6.
[0044] И наоборот, при перемещении законцовок 112, 116 первого и второго крыльев из сложенного положения в выдвинутое положение (например, во время руления к взлетно-посадочной полосе перед взлетом), приведенная в качестве примера система 400 управления летательным аппаратом по ФИГ. 4 может перемещать одну поверхность или большее количество поверхностей управления на первом и втором крыльях 104, 106 для увеличения аэродинамических нагрузок на законцовках 112, 116 первого и второго крыльев и/или создания отрицательного шарнирного момента иным образом. При раскладывании законцовки крыла, например, выгодным положением является положение, в котором поверхность управления создает максимальный воздушный поток или относительно большую часть воздушного потока, направленного к законцовке крыла, и/или иным образом создает силу (например, отрицательный шарнирный момент) в направлении, в котором законцовка крыла должна быть разложена, по сравнению с другими положениями поверхности управления. Невыгодным положением, с другой стороны, может быть положение, в котором поверхность управления создает минимальную или меньшую аэродинамическую нагрузку на законцовку крыла и/или каким-либо иным образом не вносит вклада в создание силы в направлении, в котором законцовка крыла должна быть разложена по сравнению с другими положениями поверхности управления. Например, выгодным положением для первого элерона 118 при раскладывании законцовки 112 первого крыла может быть положение, в котором задняя кромка направлена вверх, как показано на ФИГ. 2 и 3, что создает аэродинамические нагрузки на законцовку 112 первого крыла путем направления воздушного потока 300 к законцовке 112 первого крыла. В связи с этим, система 400 управления летательным аппаратом может быть использована для направления воздушного потока с протеканием к верхней поверхности первого крыла 104, когда предпринимается попытка переместить законцовки 112 первого крыла вниз (ФИГ. 3), или направления воздушного потока в сторону от верхней поверхности, когда предпринимается попытка переместить законцовки 112 первого крыла вверх (ФИГ. 6). Приведенный в качестве примера процессор 410 может определить, находится ли поверхность управления в выгодном положении или невыгодном положении для раскладывания законцовки крыла. Если поверхность управления находится в невыгодном положении, процессор 410 вырабатывает инструкцию на перемещение соответствующей поверхности управления в выгодное положение. На основе этой инструкции контроллер (контроллеры) 402 привода поверхности управления может (могут) вырабатывать один сигнал или большее количество сигналов управления для приведения в действие соответствующего привода (соответствующих приводов) 404а-n поверхности управления для перемещения соответствующей поверхности управления в выгодное положение.
[0045] В некоторых примерах перед выдачей поверхности управления инструкции на перемещение, процессор 410 определяет, может ли поверхность управления быть перемещена на основании одного или более законов управления, которые могут быть основаны на одном или более входных сигналах (например, скорости относительно земли, направления ветра и т.д.). Например, один закон управления (например, закон управления, связанный с нахождением колес на земле) может устанавливать, что поверхность (поверхности) управления может (могут) быть перемещена (перемещены) в выгодное положение (выгодные положения), только если определен факт нахождения летательного аппарата 100 на земле. Для определения факта нахождения летательного аппарата 100 на земле (например, он приземлился, готовится к взлету, не находится в полете) система 400 управления летательным аппаратом по ФИГ. 4 включает в себя устройство 414 определения веса на колесе, которое принимает сигналы от датчика 416 (например, датчика веса на колесе) и определяет, находится ли летательный аппарат 100 на земле. Если процессор 410 определяет, что летательный аппарат 100 находится на земле (например, на основании входных сигналов от устройства 414 определения веса на колесе и/или датчика 416), указанную инструкцию отправляют в контроллер (контроллеры) 402 привода поверхности управления, который (которые) может (могут) вырабатывать сигнал (сигналы) управления на перемещение поверхности (поверхностей) управления в желаемое (желаемые) или выгодное положение (выгодные положения). В противном случае, если процессор 410 определяет, что летательный аппарат 100 еще не совершил посадку, процессор 410 приостанавливает или запрещает желаемое перемещение поверхности (поверхностей) управления в выгодное положение (выгодные положения). Таким образом, приведенный в качестве примера закон управления предотвращает перемещение поверхности (поверхностей) управления, пока летательный аппарат 100 находится в полете.
[0046] Еще один приведенный в качестве примера закон управления (который может быть реализован в дополнение к закону управления, связанному с нахождением колес на земле и описанному выше, или вместо него) может устанавливать, что поверхность (поверхности) управления может (могут) быть перемещена (перемещены) в более выгодное положение, только если летательный аппарат 100 перемещается со скоростью, меньше порогового значения, или скоростью срабатывания, такой как, например, 15 узлов (28 км/ч). Скорость срабатывания может быть сохранена, например, в базе данных 412 и может учитывать конструкцию (например, вес, размах крыла и т.д.) летательного аппарата 100. В некоторых примерах скорость срабатывания является скоростью, при которой поверхность (поверхности) управления, подлежащая перемещению (например, первый элерон 118, предкрылок 124 передней кромки, поверхность (поверхности) управления возле законцовки 112 первого крыла и т.д.) больше не является аэродинамически эффективной. Иными словами, при скорости меньше скорости срабатывания, поверхность (поверхности) управления оказывает небольшое влияние или совсем не оказывает влияния на перемещение летательного аппарата 100/управление летательным аппаратом 100. Таким образом, поверхность (поверхности) управления может (могут) быть перемещена (перемещены) в другое положение (другие положения) без оказания влияния на управление летательным аппаратом 100, совершающим посадку. Для определения скорости летательного аппарата 100, система 400 управления летательным аппаратом по ФИГ. 4 включает в себя устройство 418 определения скорости (например, спидометр), которое принимает сигналы от датчика 420 для определения скорости (например, скорости относительно земли и/или относительной скорости ветра) летательного аппарата 100. Процессор 410 сравнивает текущую скорость летательного аппарата 100 (например, как определено на основании входных сигналов от устройства 418 определения скорости и/или датчика 420) со скоростью срабатывания, сохраненной в базе данных 412. Если процессор определяет, что летательный аппарат 100 перемещается со скоростью меньше скорости срабатывания, процессор 410 отправляет инструкцию в контроллер (контроллеры) 402 привода поверхности управления, который вырабатывает сигнал (сигналы) управления на перемещение поверхности (поверхностей) управления в желаемое (желаемые) или выгодное положение (выгодные положения). В противном случае, если летательный аппарат 100 перемещается со скоростью больше скорости срабатывания, процессор 410 приостанавливает или запрещает (например, предотвращает) желаемое или требуемое пилотом перемещение поверхности (поверхностей) управления в выгодное положение (выгодные положения). В некоторых примерах процессор 410 даже может не определять желаемое или запрашиваемое изменение положения поверхности управления, если скорость больше скорости срабатывания.
[0047] Еще один приведенный в качестве примера закон управления может быть основан на том, не будет ли перемещение поверхности (поверхностей) управления из невыгодного положения (невыгодных положений) в выгодное положение (выгодные положения) противоречить одной команде или более командам 422 пилота (ФИГ. 4). Процессор 410 выполнен с возможностью определения, на основе закона управления, может (могут) ли команда (команды) 422 пилота быть отменена (отменены) или приостановлена (приостановлены) и/или иным образом модифицирована. Например, как указанно выше, пилот может реализовывать команду управления аэродинамическим тормозом, которая вызывает развертывание некоторых поверхностей управления в определенные положения для замедления летательного аппарата 100. В таком примере процессор 410 определяет на основании устройства 418 определения скорости, перемещается ли летательный аппарат 100 со скоростью меньше скорости срабатывания. Если процессор 410 определяет, что летательный аппарат 100 перемещается со скоростью меньше скорости срабатывания, процессор 410 может отменить или приостановить команду (команды) 422 пилота. В таком примере процессор может выполнить отправку указанной инструкции в контроллер (контроллеры) 402 привода поверхности управления, который (которые) после этого может (могут) вырабатывать сигнал (сигналы) управления на перемещение поверхности управления (например, посредством привода (приводов) 404а-n поверхности управления) в выгодные положения. Например, контроллер (контроллеры) 402 привода поверхности управления может (могут) вырабатывать сигнал управления на перемещение первого элерона 118 в обтекаемое положение или положение, в котором задняя кромка направлена вниз. Как рассмотрено в настоящем документе, при скорости меньше скорости срабатывания, первый элерон 118 может оказывать небольшое влияние или совсем не оказывать влияния на управление летательным аппаратом 100. Таким образом, отмена или приостановка команды управления аэродинамическим тормозом (например, реализуемая командой (командами) 422 пилота) не повлияет отрицательно на замедление летательного аппарата 100. В противном случае, если процессор 410 определяет, что летательный аппарат 100 не перемещается со скоростью меньше скорости срабатывания, процессор 410 может приостановить желаемое или запрашиваемое пилотом перемещение поверхности управления в выгодное положение.
[0048] В качестве еще одного примера, в некоторых случаях пилот может реализовывать команду на уборку механизации после посадки, которая приводит к отводу поверхностей управления в их убранные положения. Однако, как указанно выше, развернутое или выдвинутое положение внешнего предкрылка из предкрылков 124 передней кромки является выгодным для подъема законцовки 112 первого крыла. Таким образом, если команда 422 пилота является такой командой, процессор 410 может отменить или приостановить выполнение команды 422 пилота с удержанием внешнего предкрылка 124 передней кромки в выдвинутом положении. В других примерах, если внешний предкрылок 124 передней кромки уже отведен, контроллер (контроллеры) 402 привода поверхности управления может (могут) вырабатывать один сигнал или большее количество сигналов управления для повторного выпуска или развертывания предкрылка 124 передней кромки, в результате чего происходит размещение внешнего предкрылка 124 передней кромки в выгодном положении перед складыванием законцовки 112 первого крыла.
[0049] В некоторых примерах закон управления может предписывать, что команда (команды) 422 пилота не может (могут) быть отменена (отменены) или приостановлена (приостановлены) системой 400 управления законцовками крыльев. Например, если команда (команды) 422 пилота основаны на определенных командах, направленных на управление летательным аппаратом 100, процессор 410 приостанавливает или запрещает желаемое перемещение поверхности (поверхностей) управления (например, чтобы избежать влияния на осуществляемое пилотом управление летательным аппаратом 100). Например, при посадке при боковом ветре пилот может реализовывать команду на выполнение крена, которая приводит к развертыванию определенных поверхностей управления, чтобы улучшить управляемость летательного аппарата 100. В таком примере закон управления может предписывать, что положение поверхности управления, независимо от того, является ли оно выгодным или нет, не может быть отменено или приостановлено. Например, если ветер направлен справа налево, пилот может реализовывать команду на выполнение крена, которая вызывает крен летательного аппарата 100 вправо (например, в направлении ветра). По существу, команда (команды) 422 пилота приводит к переводу первого элерона 118 (ФИГ. 1) в положение, в котором задняя кромка направлена вниз, и переводу второго элерона 130 в положение, в котором задняя кромка направлена вверх. В этой конфигурации первый элерон 118 уже находится в желаемом или выгодном положении (например, в обтекаемом положении или в положении, в котором задняя кромка направлена вниз). Дополнительно, когда второй элерон 130 может быть в положении, в котором задняя кромка направлена вверх (что может быть невыгодным при встречном ветре или безветрии), ветер, дующий справа, способствует толканию законцовки 116 правого крыла вверх. Кроме того, поскольку ветер направлен справа налево, воздушный поток в целом направлен с сужением назад вправо вторым элероном 130. Таким образом, даже при реализации команды на выполнение крена, которую система 400 не отменяет, первый и второй элероны 118, 130 находятся в наиболее выгодном положении для подъема законцовок 112, 116 крыльев. В некоторых примерах могут быть использованы множество из приведенных в качестве примера законов управления, раскрытых в настоящем документе. Дополнительно или еще в одном варианте реализации изобретения могут быть использованы законы управления других видов. Например, может быть реализован закон управления, основанный на направлении ветра относительно летательного аппарата 100. В таком примере датчик и/или устройство определения направления ветра могут быть использованы в приведенной в качестве примера системе 400 управления летательным аппаратом.
[0050] В некоторых примерах процессор 410 может отменить или приостановить выполнение команды (команд) 422 пилота, когда команда (команды) 422 пилота является (являются) симметричной (симметричными) командой (командами), но не отменить или не приостановить выполнение команды (команд) 422 пилота, когда команда (команды) 422 пилота является (являются) асимметричной командой (ассиметричными командами). Симметричной командой является команда, при которой соответствующие поверхности управления на каждом крыле перемещают в одно и то же положение, такое как, например, при выполнении команды управления аэродинамическим тормозом. С другой стороны, асимметричной командой является команда, при которой поверхность управления на одном из крыльев находится в одном положении, а соответствующая поверхность управления на другом крыле находится в отличающемся положении, таком как, например, при выполнении команды на выполнение крена для управления летательным аппаратом 100 в направлении ветра. В связи с этим, в некоторых примерах, если команда (команды) 422 пилота является/ являются симметричной командой (например, командой управления аэродинамическим тормозом), процессор 410 может отменить или приостановить эту симметричную команду и выполнить отправку инструкции в контроллер (контроллеры) 402 привода поверхности управления, который (которые) затем может (могут) осуществить перемещение поверхности управления с помощью привода (приводов) 404а-n поверхности управления. В противном случае, если команда (команды) 422 пилота является/являются асимметричной командой (например, команда на выполнение крена), процессор 410 может приостановить или предотвратить желаемое перемещение поверхности управления в выгодное положение.
[0051] В некоторых примерах интерцепторы 128, флаперон 120 и/или любая другая из указанных поверхностей управления на первом крыле 104 могут быть перемещены аналогичным образом из невыгодного положения (невыгодных положений) в выгодное положение (выгодные положения), которое (которые) уменьшает (уменьшают) отрицательные аэродинамические нагрузки на законцовку 112 первого крыла и/или иным образом уменьшает (уменьшают) отрицательный момент, развиваемый на законцовке 112 первого крыла. Операции, приведенные в качестве примера и раскрытые в настоящем документе, аналогичным образом могут быть применены ко второму крылу 106. В некоторых примерах перемещение поверхности (поверхностей) управления выполняют одновременно или по существу одновременно (например, в пределах нескольких миллисекунд). В других примерах поверхность (поверхности) управления на первом и втором крыльях 104, 106 могут работать независимо и/или в разное время.
[0052] В некоторых примерах летательный аппарат может включать в себя одну поверхность или более поверхностей управления (например, элероны, триммеры и т.д.) на законцовках крыльев. В дополнение или в качестве альтернативы перемещению одной поверхности или более поверхностей управления на неподвижных частях крыльев, в некоторых примерах поверхность (поверхности) управления на законцовках крыльев может (могут) быть использована преимущественно для создания подъемной силы, чтобы способствовать подъему законцовок крыльев во время операции складывания законцовки крыла. На ФИГ. 7А проиллюстрировано первое крыло 104, у которого есть элерон 700 на законцовке 112 первого крыла. Элерон 700 законцовки крыла управляется приводом 702 элерона законцовки крыла. На ФИГ. 7А, элерон 700 законцовки крыла находится в положении, в котором задняя кромка направлена вверх, что является типичным положением во время торможения. Однако в обтекаемом положении или в положении, в котором задняя кромка направлена вниз, элерон 700 законцовки крыльев создает больше подъемной силы на законцовке 112 первого крыла, что способствует подъему законцовки 112 первого крыла во время операции складывания законцовки крыла. В связи с этим, аналогично операциям, раскрытым выше для поверхности (поверхностей) управления на первой неподвижной части 110 первого крыла 104, система 400 управления летательным аппаратом может определить, находится ли поверхность (поверхности) управления законцовок крыльев в выгодном положении или невыгодном положении (например, когда элерон 700 законцовки крыла находится в положении, в котором задняя кромка направлена вверх, как показано на ФИГ. 7А). Если процессор 410 определяет, что поверхность (поверхности) управления на законцовке 112 первого крыла находятся в невыгодном положении, процессор 410 вырабатывает инструкцию на перемещение поверхности (поверхностей) управления в выгодное положение. В некоторых примерах инструкция может быть проверена на предмет соответствия одному закону управления или большему количеству законов управления, как раскрыто выше. Если инструкция соответствует или удовлетворяет закону (законам) управления, например, контроллер (контроллеры) 402 привода поверхности управления вырабатывает (вырабатывают) сигнал (сигналы) управления на перемещение элерона 700 законцовки крыла посредством привода 702 элерона законцовки крыла в обтекаемое положение или в положении, в котором задняя кромка направлена вниз, как проиллюстрировано на ФИГ. 7 В. Как только элерон 700 законцовки крыльев оказывается в выгодном положении (или оказывается по меньшей мере перемещен из невыгодного положения (например, положения, которое создает наименьшую подъемную силу, положения, которое создает отрицательный шарнирный момент, положения, в котором задняя кромка направлена вверх)), система 400 управления летательным аппаратом может перевести законцовку 112 первого крыла из выдвинутого положения в сложенное положение. В противном случае, если инструкция нарушает закон (законы) управления, приведенная в качестве примера система 400 приостанавливает желаемое перемещение. Сходные операции могут быть выполнены аналогичным образом для законцовки 116 второго крыла, если законцовка 116 второго крыла включает в себя одну или более поверхность (поверхности) управления.
[0053] Хотя на ФИГ. 4 показан пример способа осуществления системы 400 управления летательным аппаратом, один или более элементов, процессов и/или устройств, проиллюстрированных на ФИГ. 4, могут быть скомбинированы, разделены, переставлены, пропущены, исключены и/или реализованы иным образом. Кроме того, приведенные в качестве примеров контроллер (контроллеры) 402 привода поверхности управления, контроллер (контроллеры) 406 законцовок крыльев, процессор 410, база данных 412, устройство 414 определения веса на колесе, устройство 418 определения скорости и/или, в более общем варианте, приведенная в качестве примера система 400 управления летательным аппаратом по ФИГ. 4, - могут быть реализованы аппаратными средствами, средствами программного обеспечения, прошивками и/или любой комбинацией аппаратных средств, средств программного обеспечения и/или прошивок. Таким образом, например, любой из следующих приведенных в качестве примеров объектов: контроллер (контроллеры) 402 привода поверхности управления, контроллер (контроллеры) 406 законцовок крыльев, процессор 410, база данных 412, устройство 414 определения веса на колесе, устройство 418 определения скорости и/или, в более общем варианте, приведенная в качестве примера система 400 управления летательным аппаратом по ФИГ. 4, - могут быть реализованы одной или большим количеством аналоговых или интегральных схем, логических схем, программируемым процессором (программируемыми процессорами), специализированной интегральной схемой (специализированными интегральными схемами) (ASIC)), программируемым логическим устройством (программируемыми логическими устройствами) (PLD)) и/или логическим устройством, программируемым пользователем, (логическими устройствами, программируемыми пользователем) (FPLD). При анализе любых пунктов формулы по настоящему патенту, относящихся к устройству или системе, с охватыванием чисто программной и/или программно-аппаратной реализации, по меньшей мере один из следующих приведенных в качестве примеров объектов: контроллер (контроллеры) 402 привода поверхности управления, контроллер (контроллеры) 406 законцовок крыльев, процессор 410, база данных 412, устройство 414 определения веса на колесе, устройство 418 определения скорости - считается/считаются включающим/включающими материальное машиночитаемое устройство для хранения или диск для хранения, такой как запоминающее устройство, компакт-диск формата DVD, компакт-диск формата CD, компакт-диск формата Blu-ray и т.д., хранящие это программное обеспечение и/или эти прошивки. Кроме того, приведенная в качестве примера система 400 управления летательным аппаратом по ФИГ. 4 может включать в себя один или более элементов, процессов и/или устройств в дополнение к проиллюстрированным на ФИГ. 4, или вместо них, и/или может включать в себя более одного из любых проиллюстрированных элементов, процессов и устройств или все проиллюстрированные элементы, процессы и устройства.
[0054] Структурная схема представленного приведенного в качестве примера способа реализации примера системы 400 управления летательным аппаратом по ФИГ. 4 показана на ФИГ. 8. В этом примере по меньшей мере часть способа может быть реализована с использованием машиночитаемых инструкций, которые содержат программу для исполнения процессором, таким как процессор 912, показанный в примере процессорной платформы 900, раскрытой ниже в связи с ФИГ. 9. Программа может быть воплощена в программном обеспечении, сохраненном на материальном машиночитаемом носителе для хранения, таком как компакт-диск CD-ROM только для чтения, гибкий диск, жесткий диск, компакт-диск формата DVD, компакт-диск формата Blu-ray или запоминающее устройство, связанное с процессором 912, однако в альтернативном варианте реализации изобретения вся программа и/или ее части может быть выполнена или могут быть выполнены посредством устройства, отличного от процессора 912 и/или воплощена или воплощены в прошивках или специально выполненных аппаратных средствах. Кроме того, хотя приведенная в качестве примера программа описана в отношении структурной схемы, проиллюстрированной на ФИГ. 8, могут быть использованы многие другие альтернативные способы реализации примера системы 400 управления летательным аппаратом по ФИГ. 4. Например, порядок исполнения блоков может быть изменен, и/или некоторые из описанных блоков могут быть изменены, удалены или скомбинированы.
[0055] Как указано выше, приведенный в качестве примера способ по ФИГ. 8 может быть реализован с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), сохраненных на материальном машиночитаемом носителе для хранения, таком как дисковод жесткого диска, флэш-память, оперативное запоминающее устройство (ROM), компакт-диск (CD), компакт-диск формата DVD, кэш-память, постоянное запоминающее устройство (RAM) и/или любое другое устройство для хранения или диск для хранения, на котором информация может храниться в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, для коротких примеров, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "материальный машиночитаемый носитель для хранения" явным образом означает включение любого типа машиночитаемого устройства для хранения и/или диска для хранения и исключение распространяющихся сигналов и средств передачи. При использовании в настоящем документе термины "материальный машиночитаемый носитель для хранения" и "материальный компьютерочитаемый носитель для хранения" используются взаимозаменяемо. Дополнительно или еще в одном варианте реализации изобретения, приведенный в качестве примера способ по ФИГ. 8 может быть реализован с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), сохраненных на не имеющем кратковременного характера компьютеро- и/или машиночитаемом носителе, таком как дисковод жесткого диска, флэш-память, оперативное запоминающее устройство, компакт-диск, компакт-диск DVD, кэшпамять, постоянное запоминающее устройство и/или любое другое устройство для хранения или диск для хранения, на котором информация может храниться в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, для коротких экземпляров или копий, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "не имеющий кратковременного характера (non-transitory) машиночитаемый носитель" явным образом означает включение любого типа машиночитаемого устройства для хранения и/или диска для хранения и исключение распространяющихся сигналов и средств передачи. При использовании в настоящем документе там, где выражение "по меньшей мере" используется в качестве переходного выражения в ограничительной части пункта формулы изобретения, оно является открытым в том смысле, в котором является открытым термин "содержащий".
[0056] На ФИГ. 8 представлена структурная блок-схема приведенного в качестве примера процесса или способа 800, который может быть реализован посредством приведенной в качестве примера системы 400 по ФИГ. 4 для перевода одной или более поверхности (поверхностей) управления из невыгодного положения в выгодное положение для управления (например, увеличения или уменьшения) аэродинамическими нагрузками, воздействующими на законцовку крыла. Приведенный в качестве примера способ 800 описан в связи с приведенной в качестве примера системой 400 управления летательным аппаратом по ФИГ. 4 и приведенным в качестве примера летательным аппаратом 100 по ФИГ. 1. Однако следует понимать, что приведенный в качестве примера способ 800 может быть реализован на другом летательном аппарате и/или с другой системой (системами) управления летательным аппаратом. Приведенный в качестве примера способ 800 может быть выполнен перед операцией складывания законцовки крыла или во время операции складывания законцовки крыла (например, при перемещении законцовки крыла из выдвинутого положения в сложенное положение, перемещении законцовки крыла из сложенного положения в выдвинутое положение). В некоторых примерах способ 800 реализуется автоматически. В других примерах способ 800 может быть реализован с помощью управления в ручном режиме или приведения в действие пилотом.
[0057] Приведенный в качестве примера способ 800 включает определение, находится ли летательный аппарат 100 на земле (например, приземлился, перед взлетом, не в полете) (блок 802). В примере, показанном на ФИГ. 4, система 400 управления летательным аппаратом включает в себя устройство 414 определения веса на колесе, которое может определить вес на колесах летательного аппарата 100 (посредством входных сигналов от датчика 416). На основе выполненного определения процессор 410 может определить, находится ли летательный аппарат 100 на земле. В других примерах для определения нахождения летательного аппарата 100 на земле (например, путем определения перемещения летательного аппарата 100 со скоростью, которая меньше скорости, при которой летательный аппарат 100 может находиться в воздухе, путем определения нахождения летательного аппарата 100 на стоянке, путем определения нахождения летательного аппарата 100 в "в режиме технического обслуживания", когда механик может выполнять работы на летательном аппарате 100, находящемся в ангаре) могут быть использованы другие устройства и/или операции. Если летательный аппарат 100 не находится на земле (например, еще не совершил посадку), система 400 управления летательным аппаратом продолжает выполнять мониторинг летательного аппарата 100 для определения, находится ли летательный аппарат 100 на земле (например, и/или система 400 управления летательным аппаратом приостанавливает любое желаемое перемещение или выдачу инструкции на перемещение поверхности управления).
[0058] Если система 400 управления летательным аппаратом определяет, что летательный аппарат 100 находится на земле, приведенный в качестве примера способ 800 включает измерение скорости летательного аппарата 100 (блок 804). Приведенная в качестве примера система 400 управления летательным аппаратом по ФИГ. 4 включает в себя устройство 418 определения скорости, которое может определить скорость летательного аппарата 100 (посредством входных сигналов от датчика 420). Процессор 410 определяет, меньше ли измеренная скорость летательного аппарата 100 скорости срабатывания (блок 806), которая может быть сохранена в базе данных 412, например. В некоторых примерах скорость срабатывания является скоростью, при которой одна или более поверхности (поверхностей) управления оказывают небольшое влияние или совсем не оказывают влияния на управление летательным аппаратом 100. Если летательный аппарат 100 не перемещается со скоростью меньше скорости срабатывания, система 400 управления летательным аппаратом продолжает измерять скорость летательного аппарата 100 для определения, перемещается ли летательный аппарат 100 со скоростью меньше скорости срабатывания (блок 806) (например, и/или система 400 управления летательным аппаратом приостанавливает любое желаемое перемещение или выдачу инструкции на перемещение поверхности управления).
[0059] Если летательный аппарат 100 перемещается со скоростью меньше скорости срабатывания, процессор 410 определяет положение поверхности управления (блок 808). Поверхность управления может быть поверхностью управления на неподвижной части 110 первого крыла 104 смежной законцовки 112 первого крыла (например, первым элероном 118, предкрылком 124 передней кромки и т.д.) или поверхности управления на законцовке 112 первого крыла (например, элероном 700 законцовки крыла). В некоторых примерах только некоторые поверхности управления назначаются способными оказывать влияние на аэродинамические нагрузки на законцовку 112 первого крыла. Например, поверхности управления рядом или возле законцовки 112 первого крыла, такие как первый элерон 118 и/или внешний предкрылок из предкрылков 124 передней кромки, могут оказывать влияние на законцовку 112 первого крыла, а поверхности управления, расположенные ближе к борту, на неподвижной части 110 первого крыла (например, флаперон 120, интерцепторы 128, расположенные ближе к борту предкрылки 124 передней кромки и т.д.) не могут оказывать влияния на законцовку 112 первого крыла. Процессор 410 может принимать информацию от контроллера (контроллеров) 402 привода поверхности управления относительно положения поверхности управления. Например, процессор 410 может определить, что первый элерон 118 находится в положении, в котором задняя кромка направлена вверх, как проиллюстрировано положением, показанным на ФИГ. 2 и 3.
[0060] После определения положения поверхности управления (блок 808), приведенная в качестве примера система 400 управления летательным аппаратом определяет, находится ли поверхность управления в невыгодном положении или выгодном положении (блок 810). Невыгодным положением для перемещения законцовки крыла из выдвинутого положения в сложенное положение может быть, например, положение, в котором поверхность управления создает максимальный воздушный поток или большую часть воздушного потока, направленного к законцовке крыла, и/или иным образом создает силу (например, отрицательный шарнирный момент) в противоположном направлении, в котором законцовка крыла должна быть сложена по сравнению с другими положениями поверхности управления. Выгодным положением для перемещения законцовки крыла из выдвинутого положения в сложенное положение, с другой стороны, может быть положение, в котором соответствующая поверхность управления создает минимальную или меньшую аэродинамическую нагрузку на законцовку крыла и/или каким-либо иным образом не вносит вклада в создание силы (например, уменьшает отрицательный шарнирный момент) в противоположном направлении по сравнению с другими положениями поверхности управления. Например, в случае первого элерона 118 положение, в котором задняя кромка направлена вверх, является невыгодным положением, поскольку оно приводит к направлению воздушного потока к законцовке 112 первого крыла, как проиллюстрировано положением, показанным на ФИГ. 3. С другой стороны, выгодным положением, например, может быть обтекаемое положение или положение, в котором задняя кромка направлена вниз, как проиллюстрировано положением, показанным на ФИГ. 5 и 6, в котором первый элерон 118 не направляет воздушный поток на законцовку 112 первого крыла. Выгодные и невыгодные положения для перемещения законцовки крыла из сложенного положения в выдвинутое положение (например, раскладывание законцовки крыла), с другой стороны, могут быть противоположными по сравнению с выгодным и невыгодным положениями для перемещения законцовки крыла из выдвинутого положения в сложенное положение. В некоторых примерах может быть множество выгодных положений и/или множество невыгодных положений. В некоторых примерах при складывании законцовки крыла, выгодным положением является положение, в котором соответствующая поверхность управления обусловливает минимальную аэродинамическую нагрузку на законцовку крыла, которая бы противодействовала переводу законцовки крыла. Иными словами, в некоторых примерах выгодное положение продолжает создавать аэродинамическую нагрузку на законцовку крыла, но аэродинамическая нагрузка относительно невелика по сравнению с другими возможными положениями соответствующей поверхности управления.
[0061] Если процессор 410 определяет, что поверхность управления уже находится в выгодном положении (блок 810), приведенный в качестве примера способ 800 включает определение, возможны ли отмена или приостановка последующей команды (выдаваемой, например, пилотом) (блок 812). Например, если поверхность управления находится в желаемом или выгодном положении и последующая команда пилота направлена на перемещение поверхности управления из выгодного положения, процессор 410 может отменить или приостановить выполнение команды (команд) 422 пилота. Например, если пилот подает команду на уборку механизации для перемещения внешнего предкрылка из предкрылков 124 передней кромки в убранное положение, процессор 410 может отменить или приостановить выполнение команды на уборку механизации (блок 814) для поддержания внешнего предкрылка 124 передней кромки в выгодном положении (например, выдвинутом или развернутом положении). В противном случае, в некоторых примерах команда (команды) 422 пилота не может быть отменена или приостановлена или не могут быть отменены или приостановлены (блок 816). Независимо от того, может (могут) или нет команда (команды) 422 пилота быть отменена (отменены), согласно приведенному в качестве примера способу 800 затем определяют может ли другая поверхность управления быть перемещена в более выгодное положение (блок 818).
[0062] Если приведенная в качестве примера система 400 управления летательным аппаратом определяет, что поверхность управления находится в невыгодном положении (блок 808), система 400 управления летательным аппаратом определяет изменение (например, желаемое изменение) положения поверхности управления с переходом из невыгодного положения (например, первого положения) в выгодное положение (например, второе положение) для способствования перемещению законцовки крыла. В некоторых примерах система 400 управления летательным аппаратом определяет, может ли поверхность управления быть перемещена в выгодное положение (блок 820). Определение, возможно ли перемещение поверхности управления, может быть основано на одном или более законе (законах) управления, который может указывать на возможность безопасного перемещения поверхности управления (например, без оказания воздействия на управление пилотом, необходимое для маневрирования летательным аппаратом 100). Закон (законы) управления может (могут) предписывать, может (могут) ли быть отменена (отменены) или приостановлена (приостановлены) некоторые из команд 422 пилота. Например, если команда 422 пилота является командой управления аэродинамическим тормозом, а летательный аппарат 100 находится на земле и перемещается со скоростью меньше скорости срабатывания (блоки 802, 806), команда управления аэродинамическим тормозом может быть отменена или приостановлена. Контроллер (контроллеры) 402 привода поверхности управления после этого может (могут) вырабатывать сигнал (сигналы) управления, на основании инструкции, полученной от процессора 410, для соответствующего привода (приводов) 404а-n поверхности управления для перемещения поверхности управления (блок 822) в выгодное положение. В других примерах команда 422 пилота не может быть отменена или приостановлена. Например, если команда 422 пилота реализуется командой на выполнение крена, чтобы противодействовать боковому ветру, тогда осуществление перемещения поверхности управления не будет безопасным. Однако при боковых ветрах, как раскрыто в настоящем документе, направление ветра в целом помогает или способствует подъему законцовок крыльев. В некоторых примерах симметричные команды пилота могут быть отменены или приостановлены, а асимметричные команды пилота не могут быть отменены или приостановлены. После перемещения поверхности управления 822, приведенный в качестве примера способ 800 может включать мониторинг невыгодных команд пилота и определение, возможна ли отмена таких команд (блок 812).
[0063] Если имеется еще одна контрольная поверхность, которая может быть перемещена для уменьшения или увеличения аэродинамической нагрузки на законцовку крыла (в зависимости от желаемого перемещения законцовки крыла), приведенный в качестве примера способ 800 включает повторное определение положения поверхности управления (блок 808). Например, система 400 управления летательным аппаратом может определить положение предкрылка 124 передней кромки (например, второй поверхности управления) и определить, находится ли предкрылок 124 передней кромки в выгодном положении или невыгодном положении для способствования перемещению законцовки 112 первого крыла. Указанный процесс может быть повторен для каждой управляющей поверхности, которая оказывает влияние на аэродинамическую нагрузку на законцовку крыла. В некоторых примерах множество поверхностей управления перемещают по существу одновременно (например, в пределах нескольких миллисекунд). После перемещения или не перемещения, поверхности (поверхностей) управления, приведенная в качестве примера система 400 управления летательным аппаратом перемещает законцовку 112 первого крыла между выдвинутым положением и сложенным положением (блок 824). Приведенный в качестве примера способ 800 схожим образом может быть использован для складывания и/или раскладывания законцовки 116 второго крыла 106. Иными словами, одна или более поверхностей управления на втором крыле 106 могут быть перемещены аналогичным образом перед складыванием и/или раскладыванием законцовки 116 второго крыла.
[0064] На ФИГ. 9 показана блок-схема примера процессорной платформы 900, выполненной с возможностью исполнения инструкций для реализации по меньшей мере части способа 800 по ФИГ. 8 и для реализации системы 400 управления летательным аппаратом по ФИГ. 4. Процессорная платформа 900 может представлять собой, например, сервер, личный компьютер, мобильное устройство (например, мобильный телефон, смартфон, планшет, такой как iPadTM), персональный цифровой помощник (PDA), Интернет-устройство, DVD-плеер, CD-плеер, цифровой видеомагнитофон, Blu-Ray плеер, игровая приставка, персональный видеомагнитофон или компьютерное устройство любого другого необходимого типа.
[0065] Процессорная платформа 900 показанного примера включает в себя процессор 912. Процессор 912 показанного примера является аппаратным средством. Например, процессор 912 может быть реализован одним или большим количеством интегральных схем, логических схем, микропроцессоров или контроллеров любого необходимого типа или производителя.
[0066] Процессор 912 показанного примера включает в себя локальное запоминающее устройство 913 (например, кэш-память). Процессор 912 показанного примера сообщается с основным запоминающим устройством, в том числе с энергозависимым запоминающим устройством 914 и энергонезависимым запоминающим устройством 916 через шину 918. Энергозависимое запоминающее устройство 914 может быть реализовано оперативным запоминающим устройством с синхронной динамической памятью (SDRAM), оперативным запоминающим устройством с динамической памятью (DRAM), запоминающим устройством с синхронной оперативной видеопамятью компании Rambus с передачей данных по фронту и спаду синхроимпульса (RDRAM) и/или оперативным запоминающим устройством любого другого необходимого типа. Энергонезависимое запоминающее устройство 916 может быть реализовано с помощью флэш-памяти и/или запоминающего устройства любого другого необходимого типа. Доступ к основному запоминающему устройству 914, 916 управляется контроллером запоминающего устройства.
[0067] Процессорная платформа 900 показанного примера также включает в себя интерфейсную схему 920. Интерфейсная схема 920 может быть реализована посредством стандарта интерфейса любого типа, такого как интерфейс Ethernet, универсальная последовательная шина (USB) и/или интерфейс PCI express.
[0068] В проиллюстрированном примере одно или более устройств 922 ввода соединены с интерфейсной схемой 920. Устройство (устройства) 922 ввода обеспечивает (обеспечивают) возможность пользователю вводить данные и команды в процессор 912. Устройство (устройства) ввода может (могут) быть реализовано (реализованы), например, датчиком звука, микрофоном, камерой (неподвижного изображения или видео), клавиатурой, кнопкой, мышью, сенсорным экраном, сенсорной площадкой, трекболом, средствами isopoint и/или системой голосового распознавания.
[0069] Одно или более устройств 924 вывода также соединены с интерфейсной схемой 920 показанного примера. Устройства 824 вывода могут быть реализованы, например, дисплейными устройствами (например, светоизлучающим диодом (LED), органическим светоизлучающим диодом (OLED), жидкокристаллическим дисплеем, дисплеем с электронно-лучевой трубкой (CRT), сенсорным экраном, устройством тактильного вывода, принтером и/или громкоговорителями). Интерфейсная схема 920 показанного примера, таким образом, обычно включает в себя карту с графическим драйвером, чип с графическим драйвером или процессор с графическим драйвером.
[0070] Интерфейсная схема 920 показанного примера также включает в себя устройство связи, такое как передатчик, приемник, приемо-передающее устройство, модем и/или сетевую интерфейсную карту, для обеспечения обмена данными с внешними устройствами (например, компьютерными устройствами любого вида) через сеть 926 (например, соединение Ethernet, цифровую абонентскую линию (DSL), телефонную линию, коаксильный кабель, систему сотовой телефонии и т.п.).
[0071] Процессорная платформа 900 показанного примера также включает в себя одно или большее количество запоминающих устройств 928 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 928 большой емкости включают в себя дисководы гибкого диска, дисководы жесткого диска, приводы компакт-дисков, приводы компакт-дисков формата Blu-ray, системы типа RAID на основе матрицы независимых дисковых накопителей с избыточностью и приводы компакт-дисков формата DVD.
[0072] Кодированные инструкции 932 для реализации по меньшей мере части приведенного в качестве примера способа 800 по ФИГ. 8 могут быть сохранены в запоминающем устройстве 928 большой емкости, в энергозависимом запоминающем устройстве 914, в энергонезависимом запоминающем устройстве 916 и/или на съемном материальном машиночитаемом носителе для хранения, таком как CD или DVD.
[0073] Из описанного выше становится понятно, что раскрытые выше способы, устройство и изделия значительно уменьшают отрицательные аэродинамические нагрузки (и, таким образом, результирующие силы) на складывающуюся законцовку крыла. В результате, соответствующие приводные системы для раскладывания законцовок крыльев могут быть меньше (например, более компактными) и легче. Благодаря этому уменьшены общий вес крыльев и пространство, необходимое для размещения приводных систем. Таким образом, могут быть использованы более тонкие и легкие крылья, что позволяет выполнить полет более эффективно. Кроме того, приведенные в качестве примеров системы и способы, раскрытые в настоящем документе, также обеспечивают возможность складывания законцовок крыльев, когда летательный аппарат все еще движется. Например, законцовки крыльев могут быть сложены, когда летательный аппарат покидает взлетно-посадочную полосу и осуществляет руление по направлению к месту высадки. По существу, плановая работа летательного аппарата не прерывается вследствие складывающихся законцовок крыльев, которая в противном случае может быть прервана для получения таких же результатов.
[0074] Хотя в настоящем документе были раскрыты конкретные приведенные в качестве примера способы и устройства, объем настоящего изобретения не ограничен ими. Наоборот, настоящее изобретение включает в себя все способы, устройства и изделия, явным образом охватываемые формулой изобретения настоящего патента.
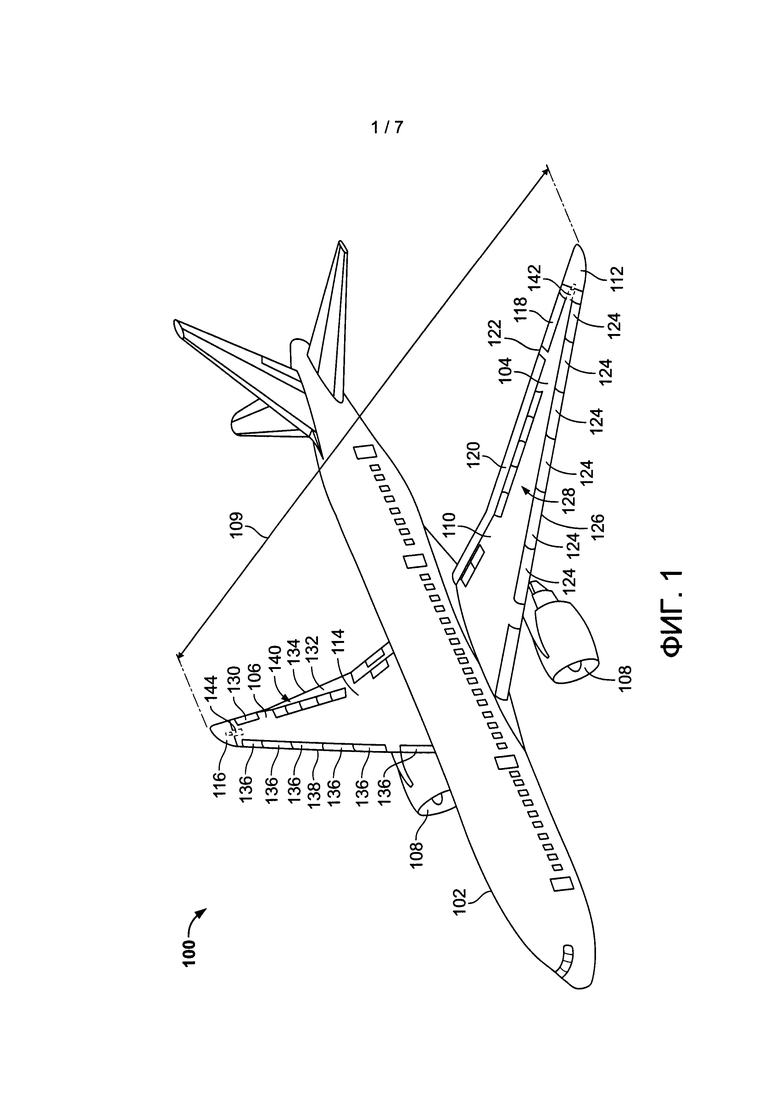
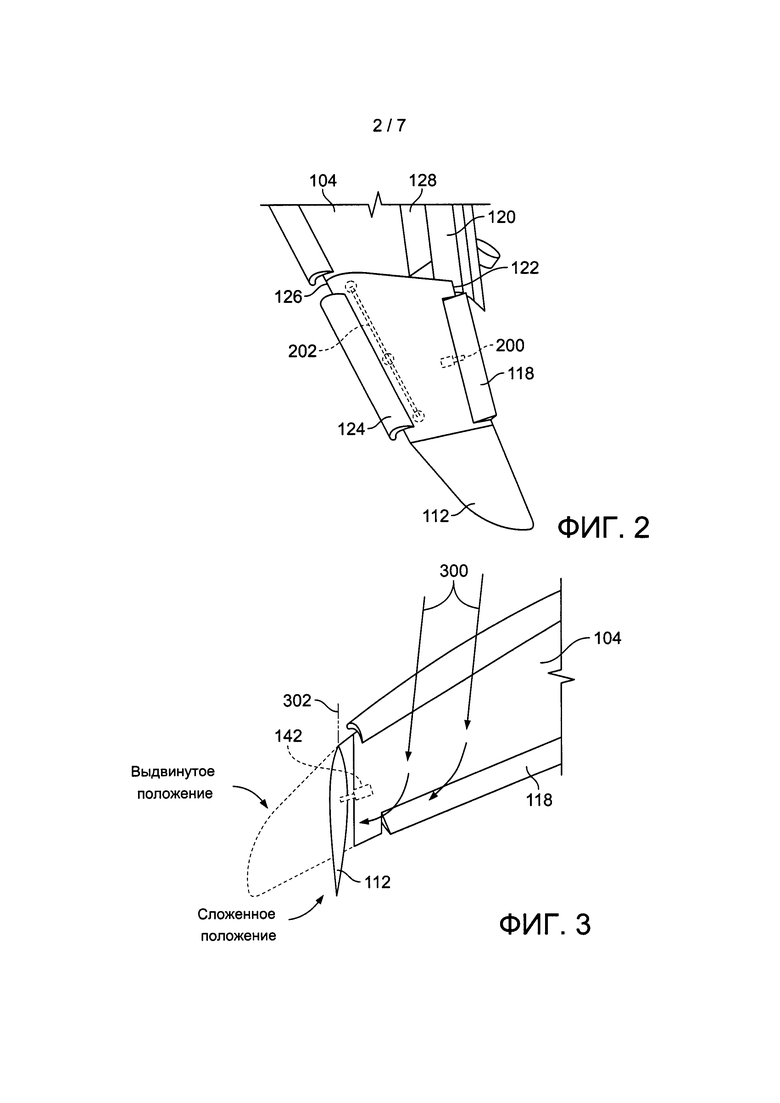
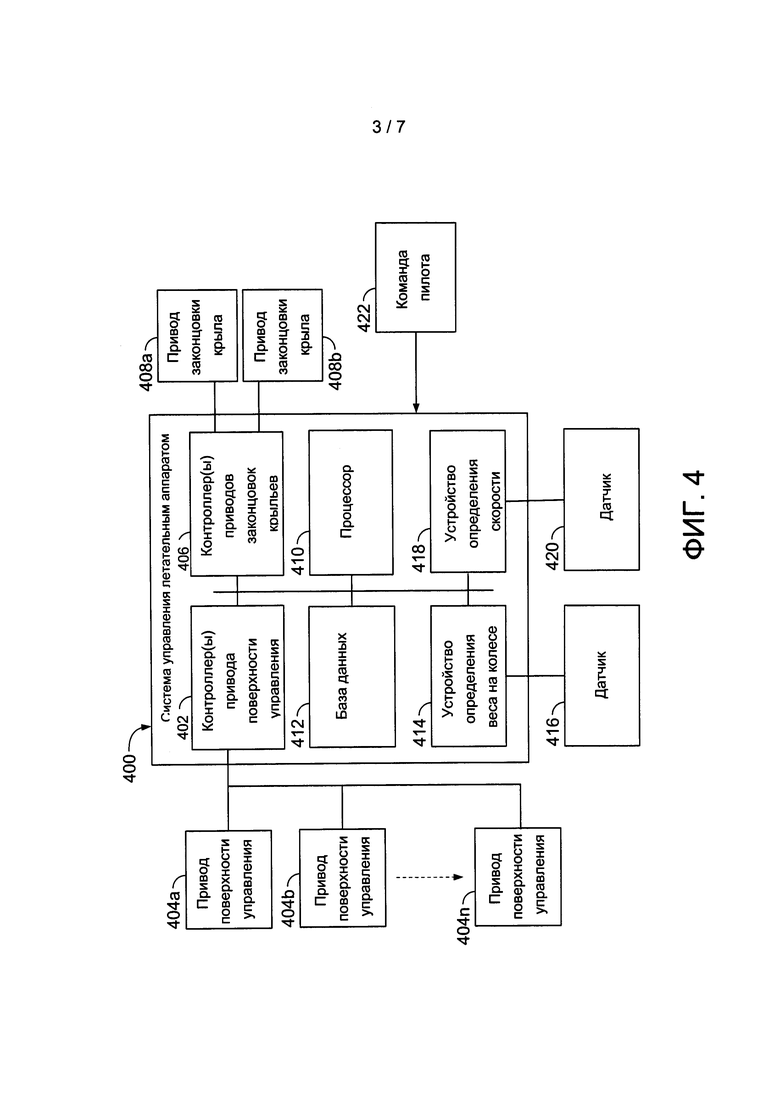
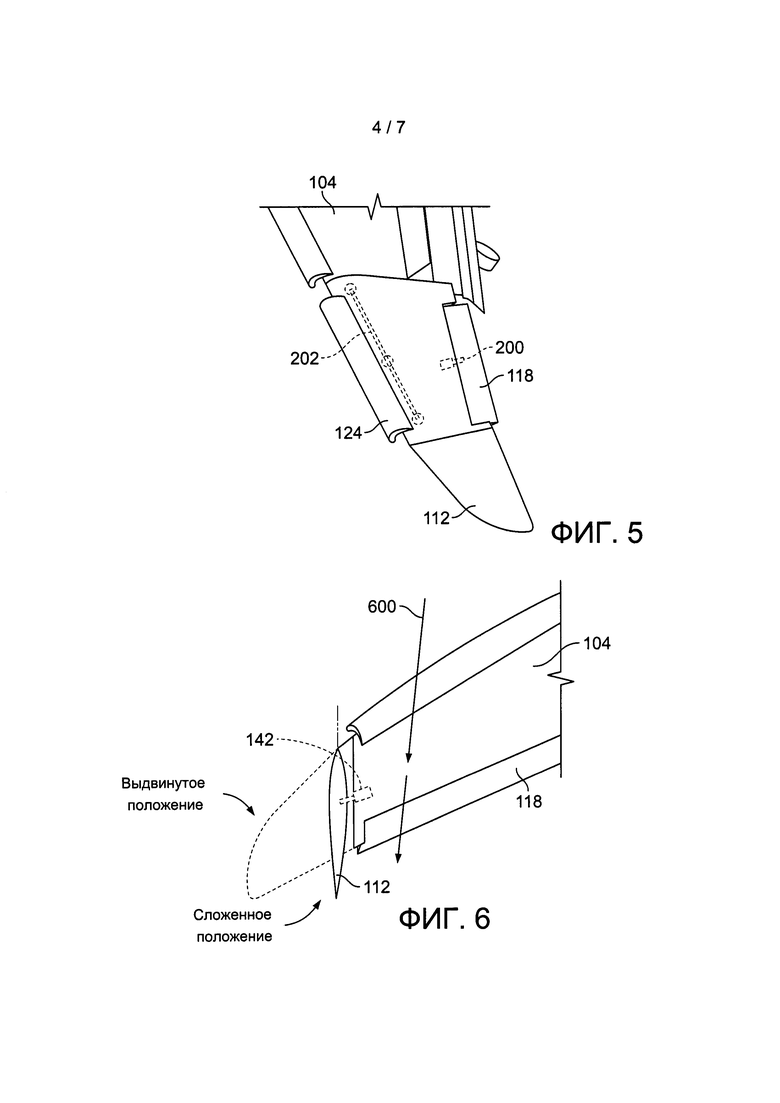
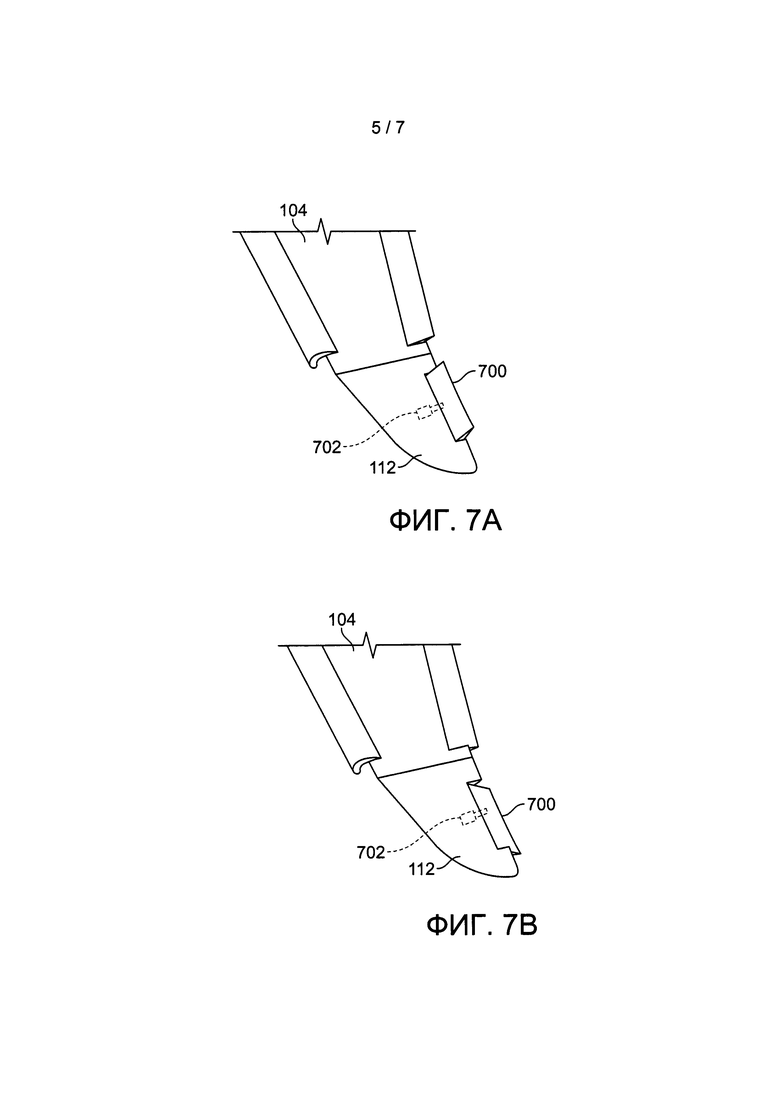
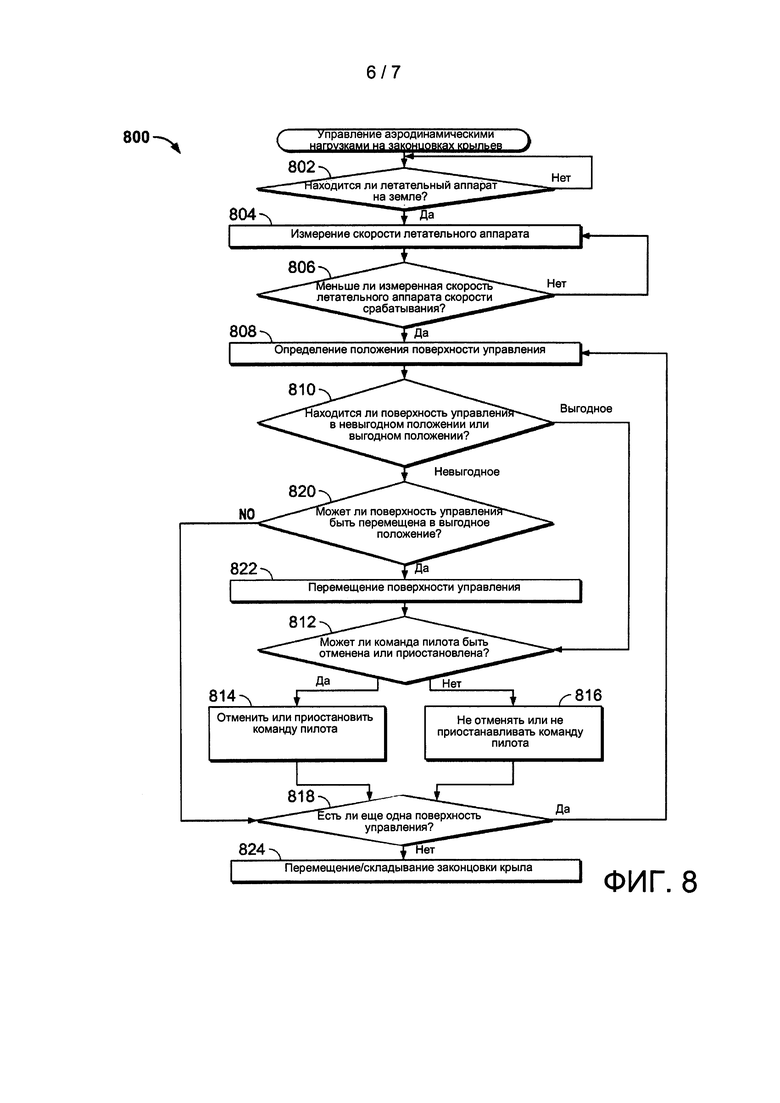
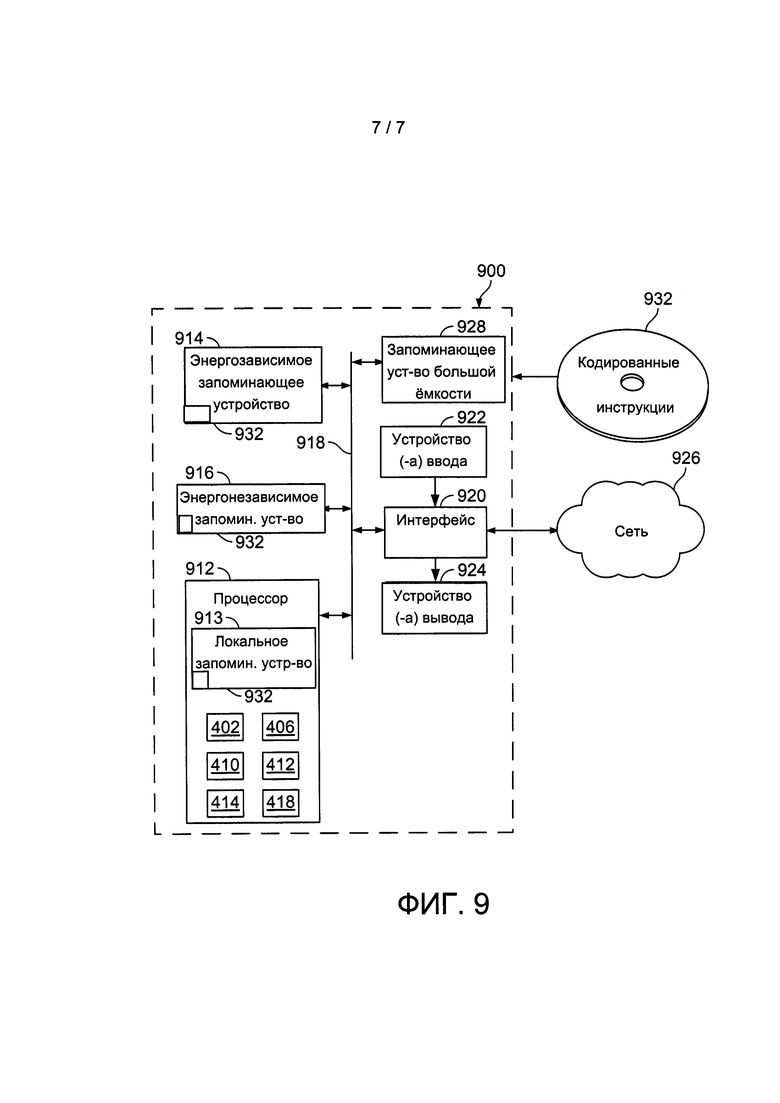
Группа изобретений относится к способу и устройству управления аэродинамическими нагрузками на складывающихся законцовках крыльев летательных аппаратов. Для управления аэродинамическими нагрузками определяют положение подвижной поверхности управления на крыле летательного аппарата, а также изменение ее положения между выдвинутым и сложенным, когда он не находится в полете. Устройство содержит процессор, выполненный с возможностью выработки команд для выполнения этапов способа, два контроллера для связи с приводами управления законцовками крыльев. Обеспечивается возможность управления законцовками крыльев летательных аппаратов. 2 н. и 12 з.п. ф-лы, 9 ил.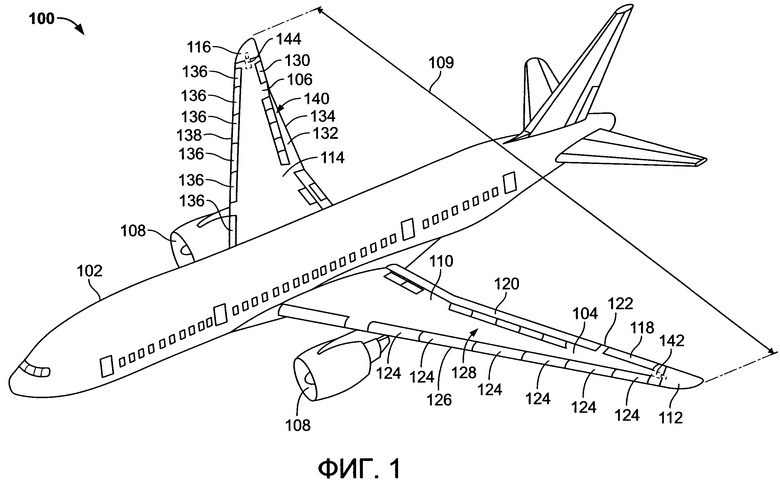
1. Способ управления аэродинамическими нагрузками на складывающихся законцовках крыльев летательных аппаратов, включающий:
определение положения поверхности управления на крыле летательного аппарата, при этом крыло имеет неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла;
определение, посредством процессора, изменения положения поверхности управления с переходом из первого положения во второе положение для способствования перемещению законцовки крыла, когда летательный аппарат не находится в полете;
перемещение поверхности управления во второе положение и
перемещение законцовки крыла между выдвинутым положением и сложенным положением.
2. Способ по п. 1, согласно которому поверхность управления является элероном на неподвижной части крыла возле законцовки крыла.
3. Способ по п. 2, согласно которому, если необходимо переместить законцовку крыла из выдвинутого положения в сложенное положение, вторым положением элерона является обтекаемое положение или положение, в котором задняя кромка направлена вниз.
4. Способ по пп. 1, 2 или 3, согласно которому поверхность управления при нахождении во втором положении направляет меньше воздуха к законцовке крыла, чем при нахождении в первом положении.
5. Способ по пп. 1-3 или 4, также включающий:
определение посредством процессора скорости летательного аппарата и
предотвращение указанного определения изменения и указанного перемещения поверхности управления, если скорость больше скорости срабатывания.
6. Способ по пп. 1-4 или 5, также включающий:
определение посредством процессора, не будет ли перемещение поверхности управления во второе положение противоречить команде пилота; и
перемещение поверхности управления во второе положение, если команда пилота является командой управления аэродинамическим тормозом, или предотвращение перемещения поверхности управления во второе положение, если команда пилота является командой на выполнение крена.
7. Способ по п. 1-5 или 6, согласно которому поверхность управления является первой поверхностью управления, при этом способ также включает:
определение положения второй поверхности управления на неподвижной части крыла;
определение, посредством процессора, изменения положения второй поверхности управления с переходом из третьего положения в четвертое положение для способствования перемещению законцовки крыла, когда летательный аппарат не находится в полете; и
перемещение второй поверхности управления в третье положение.
8. Устройство для управления аэродинамическими нагрузками на складывающихся законцовках крыльев летательных аппаратов, содержащее:
- процессор, выполненный с возможностью:
- определения, возможно ли перемещение поверхности управления на крыле летательного аппарата из невыгодного положения в выгодное положение на основе закона управления, при этом крыло имеет неподвижную часть крыла и законцовку крыла, соединенную с возможностью перемещения с неподвижной частью крыла; и
- выработки инструкции на перемещение поверхности управления в выгодное положение на основании того, возможно ли перемещение поверхности управления;
- первый контроллер, предназначенный для соединения с возможностью связи с первым приводом, при этом первый привод соединен с поверхностью управления, а первый контроллер выполнен с возможностью выработки сигнала управления, при получении указанной инструкции, на перемещение поверхности управления из невыгодного положения в выгодное положение; и
- второй контроллер, предназначенный для соединения с возможностью связи со вторым приводом для перемещения законцовки крыла в соответствии с операцией перемещения законцовки крыла.
9. Устройство по п. 8, в котором закон управления основан на скорости летательного аппарата, а процессор, для определения, возможно ли перемещение поверхности управления, выполнен с возможностью:
определения скорости летательного аппарата;
сравнения этой скорости со скоростью срабатывания и
отправки указанной инструкции в первый контроллер, если скорость меньше скорости срабатывания, или предотвращения перемещения поверхности управления в выгодное положение, если скорость больше скорости срабатывания.
10. Устройство по п. 8 или 9, в котором закон управления основан на команде пилота, причем, если команда пилота является симметричной командой, процессор настроен на отправку указанной инструкции на первый контроллер или, если команда пилота является асимметричной командой, процессор настроен на предотвращение перемещения поверхности управления в выгодное положение.
11. Устройство по пп. 8, 9 или 10, в котором операция перемещения законцовки крыла является переводом из выдвинутого положения в сложенное положение.
12. Устройство по п. 11, в котором поверхность управления при нахождении в выгодном положении выполнена с возможностью направления меньшего количества воздуха к законцовке крыла, чем при нахождении в невыгодном положении.
13. Устройство по п. 11, в котором поверхность управления является предкрылком передней кромки.
14. Устройство по п. 13, в котором выгодным положением предкрылка передней кромки является развернутое положение.
| EP 2881322 A1, 10.06.2015 | |||
| US 20150108283 A1, 23.04.2015 | |||
| US 20150014478 A1, 15.01.2015 | |||
| US 8788122 B1, 22.07.2014 | |||
| RU 2013113631 A, 10.10.2014. |

