ПЕРЕКРЕСТНАЯ ССЫЛКА
[0001] Настоящая заявка испрашивает приоритет по предварительной заявке на выдачу патента США №62/458,882, поданной 14 февраля 2017 г., полное содержание которой включено в настоящий документ посредством ссылки. Применительно к США настоящая заявка представляет собой частичное продолжение международной заявки на патент № РСТ/IB 2016/056824, поданной 11 ноября 2016 г., которая претендует на приоритет по предварительной заявке на выдачу патента США №62/254,421, поданной 12 ноября 2015 г., полное содержание которых включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящая технология относится к способу и системе для запуска двигателя внутреннего сгорания.
УРОВЕНЬ ТЕХНИКИ
[0003] Для запуска двигателя внутреннего сгорания небольших транспортных средств, таких как снегоход, иногда предложен стартер обратного хода. Для запуска двигателя пользователь тянет за шнур стартера обратного хода, что вызывает вращение коленчатого вала двигателя. Если коленчатый вал вращается достаточно быстро, двигатель может быть запущен. В противном случае, за шнур следует потянуть снова до тех пор, пока двигатель не запустится.
[0004] Для облегчения запуска двигателя некоторые транспортные средства были снабжены системой электрического запуска. Данная система состоит из электрического двигателя, известного как стартер, который входит в зацепление и поворачивает ведомую шестерню, соединенную с коленчатым валом через механизм Бендикса™, когда ключ зажигания повернут или кнопка запуска нажата пользователем. Стартер поворачивает коленчатый вал достаточно быстро для обеспечения запуска двигателя и, как только двигатель был запущен, выводит ведомую шестерню из зацепления и выключается. Транспортное средство имеет батарею для подачи электрического тока на стартер для поворачивания коленчатого вала.
[0005] Несмотря на большое удобство для пользователя, системы электрического запуска описанного выше типа имеют некоторые недостатки. Батарея, стартер и связанные с ними компоненты добавляют веса транспортному средству. Как может быть понятно, дополнительный вес уменьшает топливную эффективность транспортного средства и может повлиять на управление транспортным средством. В случае снегоходов, данный вес также усложняет заезд снегохода на заснеженную верхнюю точку. Эти системы электрического запуска также требуют дополнительных этапов сборки при производстве транспортного средства и занимают пространство внутри транспортного средства.
[0006] Для перезарядки батареи и для выдачи электрического тока, необходимого для функционирования различных компонентов транспортного средства сразу после запуска двигателя, с коленчатым валом двигателя функционально соединен электрический генератор. По мере того, как коленчатый вал поворачивает ротор электрического генератора, генератор вырабатывает электричество.
[0007] В последние годы некоторые транспортные средства были снабжены блоками двигателя-генератора, также называемыми стартер-генераторами, которые заменяют стартер и электрический генератор. Двигатель-генератор функционально соединен с коленчатым валом способом, подобным вышеупомянутому электрическому генератору. Блок двигателя-генератора может быть использован в качестве стартера или в качестве генератора. За счет подачи тока на блок двигателя-генератора, блок двигателя-генератора функционирует в качестве стартера и поворачивает коленчатый вал для обеспечения возможности запуска двигателя. Когда двигатель-генератор функционирует в качестве генератора, вращение коленчатого вала приводит к вырабатыванию электричества двигателем-генератором. Как может быть понятно, использование таких систем устраняет некоторые недостатки систем для запуска, использующих отдельные стартеры и электрические генераторы.
[0008] Для запуска двигателя, крутящий момент, прилагаемый к коленчатому валу для его поворота, должен быть достаточно большим для преодоления компрессии внутри цилиндров двигателя, являющейся результатом перемещения поршней вверх в своих соответствующих цилиндрах по мере вращения коленчатого вала. Для выдачи данной величины крутящего момента, блок двигателя-генератора должен быть достаточно крупным для надлежащего функционирования в качестве стартера.
[0009] Другая проблема касается продолжительности процедуры запуска для двигателя внутреннего сгорания, которая должна быть как можно более быстрой.
[0010] Еще одна проблема касается управления двигателем-генератором. При функционировании в качестве стартера, двигатель-генератор в целом функционирует при низких скоростях вращения, достаточных для обеспечения возможности возникновения воспламенения в двигателе внутреннего сгорания. Данное функционирование требует выдачи некоторого напряжения на двигатель-генератор системой электрического запуска. При функционировании в качестве генератора, двигатель-генератор выдает электрическое питание в широком диапазоне скоростей вращения двигателя внутреннего сгорания, зачастую намного превышающих скорость вращения для запуска. Без конкретных решений по управлению напряжением, двигатель-генератор, функционирующий при высоких скоростях вращения, может вырабатывать напряжения, которые намного превосходят нужды различных компонентов транспортного средства.
[0011] Таким образом, существует необходимость в способе и системе для запуска двигателя внутреннего сгорания, которые устраняют по меньшей мере некоторые из вышеуказанных недостатков.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0012] Целью настоящей технологии является устранение по меньшей мере некоторых неудобств, существующих в предшествующем уровне техники.
[0013] В настоящей технологии предложена система, поддерживающая процедуру электрического запуска для двигателя внутреннего сгорания (ДВС), и способ электрического запуска ДВС, который использует электрическое поворотное устройство (ЭПУ), соединенное с коленчатым валом, для запуска двигателя. Способ обеспечивает возможность электрического запуска двигателя с помощью источника питания, который меньше и легче, чем традиционные батареи. Датчик передает на контроллер показание абсолютного углового положения коленчатого вала ДВС или показание абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом. Это показание доступно, когда ДВС остановлен, в начале процедуры запуска и в процессе работы ДВС. По этому показанию контроллер опознает положение поршня ДВС. Когда ДВС остановлен, поршень как правило оказывается в первом заданном положении, что связано с конфигурацией выпускных отверстий в цилиндре, в котором расположен поршень. Контроллер определяет первый уровень крутящего момента, который переведет поршень из первого заданного положения во второе у положения верхней мертвой точки (ВМТ). В это время контроллер определяет второй уровень крутящего момента, превышающий второй уровень крутящего момента, который выведет поршень за положение ВМТ. Впрыск топлива в цилиндр и воспламенение произойдут после того, как поршень пройдет положение ВМТ.
[0014] В первом аспекте настоящая технология предусматривает способ для запуска двигателя внутреннего сгорания (ДВС), имеющего коленчатый вал и электрическое поворотное устройство (ЭПУ), функционально соединенное с коленчатым валом. Определяется абсолютное угловое положение коленчатого вала, абсолютное угловое положение коленчатого вала соотносится с угловым положением ротора ЭПУ. На первом уровне электрическое питание подается на ЭПУ для вращения коленчатого вала. На втором уровне подача электрического питания на ЭПУ больше, чем на первом уровне, когда ротор ЭПУ достигает заданного углового положения.
[0015] В некоторых реализациях настоящей технологии способ дополнительно включает расчет первого уровня подачи электрического питания, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала до достижения ротором заданного углового положения; и расчет второго уровня подачи электрического питания, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала после заданного углового положения ротора.
[0016] В некоторых реализациях настоящей технологии расчет первого уровня подачи электрического питания включает использование векторного управления подачей электрического питания на первом уровне с учетом предварительного определения достаточного крутящего момента для вращения коленчатого вала до достижения ротором заданного углового положения; и расчет второго уровня подачи электрического питания включает использование векторного управления подачей электрического питания на втором уровне с учетом предварительного определения достаточного крутящего момента для вращения коленчатого вала после заданного углового положения ротора.
[0017] В некоторых реализациях настоящей технологии способ дополнительно включает подачу питания к датчику абсолютного положения, используемому для определения абсолютного углового положения коленчатого вала при остановленном ДВС.
[0018] В некоторых реализациях настоящей технологии способ дополнительно включает подачу питания к датчику абсолютного положения при вращающемся коленчатом вале.
[0019] В некоторых реализациях настоящей технологии способ дополнительно включает постепенное увеличение подачи электрического питания на ЭПУ от исходного уровня до первого уровня перед подачей электрического питания на ЭПУ на втором уровне.
[0020] В некоторых реализациях настоящей технологии абсолютное угловое положение коленчатого вала дополнительно соотносится с положением поршня в камере сгорания ДВС по отношению к положению верхней мертвой точки (ВМТ) поршня.
[0021] В некоторых реализациях настоящей технологии подача электрического питания на ЭПУ на втором уровне начинается, когда поршень достигает заданного положения перед положением ВМТ; и способ дополнительно включает впрыск топлива в камеру сгорания ДВС, когда поршень проходит положение ВМТ первый раз, и воспламенение топлива в камере сгорания.
[0022] В некоторых реализациях настоящей технологии способ дополнительно включает определение первого уровня электрического питания, подаваемого на ЭПУ, по исходному угловому положению коленчатого вала.
[0023] В некоторых реализациях настоящей технологии исходное угловое положение коленчатого вала - это положение коленчатого вала при остановленном ДВС.
[0024] В некоторых реализациях настоящей технологии исходное угловое положение - это диапазон от 80 до 100 градусов перед положением ВМТ.
[0025] В некоторых реализациях настоящей технологии подача электрического питания на ЭПУ до достижения поршнем заданного положения перед положением ВМТ вызывает вытеснение газов из камеры сгорания.
[0026] В некоторых реализациях настоящей технологии заданное положение перед положением ВМТ определяется в соответствии с конфигурацией выпускных отверстий ДВС.
[0027] В некоторых реализациях настоящей технологии заданное положение перед положением ВМТ в диапазоне от 0 до 50 градусов перед положением ВМТ.
[0028] В некоторых реализациях настоящей технологии способ дополнительно включает прекращение подачи электрического питания на ЭПУ после запуска ДВС.
[0029] В некоторых реализациях настоящей технологии подача электрического питания на ЭПУ прекращается, когда число оборотов коленчатого вала достигает минимального порога.
[0030] В некоторых реализациях настоящей технологии топливо воспламеняется до того, как поршень проходит положение ВМТ во второй раз.
[0031] В некоторых реализациях настоящей технологии впрыск топлива в камеру сгорания происходит, когда положение поршня находится в диапазоне от 3 градусов перед положением ВМТ до 7 градусов после положения ВМТ.
[0032] В некоторых реализациях настоящей технологии воспламенение топлива происходит, когда поршень находится в диапазоне от 0 до 12 градусов после положения ВМТ, воспламенение топлива происходит после впрыска топлива.
[0033] В некоторых реализациях настоящей технологии зажигание происходит до того, как поршень достигнет верхней точки выпускного отверстия в камере сгорания ДВС
[0034] В некоторых реализациях настоящей технологии первый уровень подачи электрического питания рассчитывается так, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала до достижения поршнем заданного положения перед положением ВМТ; а второй уровень подачи электрического питания рассчитывается так, чтобы ЭПУ вырабатывало достаточный крутящий момент для того, чтобы поршень переходил за положение ВМТ.
[0035] В некоторых реализациях настоящей технологии определение абсолютного углового положения коленчатого вала включает распознавание абсолютного углового положения коленчатого вала.
[0036] В некоторых реализациях настоящей технологии способ дополнительно включает распознавание абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом, при этом компонент ДВС, вращающийся синхронно с коленчатым валом, выбирается из ротора ЭПУ, топливного насоса, масляного насоса, водяного насоса, кулачкового вала и уравновешивающего вала; и расчет абсолютного углового положения коленчатого вала исходя из распознанного абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом.
[0037] Во втором аспекте настоящая технология предусматривает систему запуска двигателя внутреннего сгорания (ДВС), имеющего коленчатый вал. Система включает источник питания, электрическое поворотное устройство (ЭПУ), выполненное с возможностью установки на коленчатом валу, датчик абсолютного положения, выполненный с возможностью выдачи показаний абсолютного углового положения коленчатого вала в сопоставлении с угловым положением ротора ЭПУ, и блок управления двигателем (БУД), функционально соединенный с датчиком углового положения. БУД выполнен с возможностью определения абсолютного углового положения коленчатого вала по показаниям, полученным от датчика абсолютного положения. БУД также выполнен с возможностью регулирования подачи электрического питания от источника на ЭПУ на первом уровне для вращения коленчатого вала и на втором уровне больше, чем на первом, когда ротор ЭПУ достигает заданного углового положения.
[0038] В некоторых реализациях настоящей технологии БУД также выполнен с возможностью: расчета первого уровня подачи электрического питания, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала до достижения ротором заданного положения; и расчета второго уровня подачи электрического питания, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала после заданного углового положения ротора.
[0039] В некоторых реализациях настоящей технологии БУД реализует векторное управление подачей электрического питания на первом уровне с учетом предварительного определения достаточного крутящего момента для вращения коленчатого вала до достижения ротором заданного углового положения; и БУД реализует векторное управление подачей электрического питания на втором уровне с учетом предварительного определения достаточного крутящего момента для вращения коленчатого вала заданного углового положения ротора.
[0040] В некоторых реализациях настоящей технологии абсолютное угловое положение коленчатого вала дополнительно соотносится с положением поршня в камере сгорания ДВС по отношению к положению верхней мертвой точки (ВМТ) поршня.
[0041] В некоторых реализациях настоящей технологии подача электрического питания от источника на ЭПУ на втором уровне начинается, когда поршень достигает заданного положения перед положением ВМТ; БУД также выполнен с возможностью управления впрыском топлива в камеру сгорания ДВС, когда поршень проходит положение ВМТ первый раз, и управления воспламенением топлива в камере сгорания.
[0042] В некоторых реализациях настоящей технологии ЭПУ выполнено с возможностью коаксиальной установки на коленчатом валу.
[0043] В некоторых реализациях настоящей технологии датчик абсолютного положения выполнен с возможностью распознавания абсолютного углового положения коленчатого вала.
[0044] В некоторых реализациях настоящей технологии датчик абсолютного положения выполнен с возможностью распознавания углового положения компонента ДВС, вращающегося синхронно с коленчатым валом, при этом компонент, вращающийся синхронно с коленчатым валом, выбирается из ротора ЭПУ, топливного насоса, масляного насоса, водяного насоса, кулачкового вала и уравновешивающего вала; и БУД выполнен с возможностью расчета абсолютного углового положения коленчатого вала исходя из распознанного абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом, и исходя из механической взаимосвязи между коленчатым валом и компонентом ДВС, вращающимся синхронно с коленчатым валом.
[0045] В некоторых реализациях настоящей технологии датчик абсолютного положения постоянно подключен к источнику питания.
[0046] В некоторых реализациях настоящей технологии датчик абсолютного положения включается от источника питания при начале процедуры запуска ДВС.
[0047] В третьем аспекте настоящая технология предусматривает двигатель внутреннего сгорания (ДВС), включающий коленчатый вал, первый цилиндр, головку цилиндра, соединенную с первым цилиндром, поршень, функционально соединенный с коленчатым валом и располагающийся в первом цилиндре. Первый цилиндр, головка цилиндра и головка первого поршня определяют первую камеру сгорания с переменным объемом между ними. ДВС также включает систему запуска ДВС. Система включает источник питания, электрическое поворотное устройство (ЭПУ), выполненное с возможностью установки на коленчатом валу, датчик абсолютного положения, выполненный с возможностью выдачи показаний абсолютного углового положения коленчатого вала в сопоставлении с угловым положением ротора ЭПУ, и блок управления двигателем (БУД), функционально соединенный с датчиком абсолютного положения. БУД выполнен с возможностью определения абсолютного углового положения коленчатого вала по показаниям, полученным от датчика абсолютного положения. БУД также выполнен с возможностью регулирования подачи электрического питания от источника на ЭПУ на первом уровне для вращения коленчатого вала и на втором уровне больше, чем на первом, когда ротор ЭПУ достигает заданного углового положения. Абсолютное угловое положение коленчатого вала соотносится с положением первого поршня в первой камере сгорания.
[0048] В некоторых реализациях настоящей технологии ДВС дополнительно включает: форсунку непосредственного впрыска топлива, функционально соединенную с БУД; и систему зажигания, функционально соединенную с БУД; при этом БУД выполнен с возможностью инициирования впрыска топлива форсункой непосредственного впрыска топлива в первую камеру сгорания и инициирования воспламенения топлива системой зажигания.
[0049] В некоторых реализациях настоящей технологии ДВС дополнительно включает: второй цилиндр; и второй поршень, функционально соединенный с коленчатым валом и располагающийся во втором цилиндре, причем второй цилиндр, головка цилиндра и головка второго поршня определяют вторую камеру сгорания с переменным объемом между ними; при этом, когда первый поршень сжимает газы в первой камере сгорания, второй поршень расширяет объем второй камеры сгорания.
[0050] В четвертом аспекте настоящая технология предусматривает способ для запуска двигателя внутреннего сгорания (ДВС), имеющего коленчатый вал и электрическое поворотное устройство (ЭПУ), функционально соединенное с коленчатым валом. Датчик абсолютного положения, выполненный с возможностью выдачи показаний углового положения ротора ЭПУ, включается. На ЭПУ подается ток для выработки крутящего момента, достаточного для вращения коленчатого вала.
[0051] В некоторых реализациях настоящей технологии датчик абсолютного положения выдает показания углового положения ротора ЭПУ в сигналах, направляемых на контроллер; и контроллер непрерывно рассчитывает фактическое угловое положение ротора ЭПУ, исходя из сигналов от датчика абсолютного положения.
[0052] В некоторых реализациях настоящей технологии подача тока на ЭПУ дополнительно включает: первоначальную подачу первого тока на ЭПУ; и последующую подачу на ЭПУ второго тока, превышающего первый, когда угловое положение ротора ЭПУ переходит за заданное угловое положение.
[0053] В некоторых реализациях настоящей технологии способ дополнительно включает получение от контроллера команды на запуск ДВС.
[0054] В некоторых реализациях настоящей технологии способ дополнительно включает: определение исходного углового положения ротора ЭПУ; и определение первой величины крутящего момента для подачи от ЭПУ на коленчатый вал на основе, в частности, исходного углового положения ротора ЭПУ.
[0055] В некоторых реализациях настоящей технологии способ дополнительно включает: определение второго углового положения ротора ЭПУ, второе угловое положение указывает на то, что ротор ЭПУ прошел первое заданное угловое положение; и определение второй величины крутящего момента для подачи от ЭПУ на коленчатый вал на основе, в частности, второго углового положения ротора ЭПУ, при этом вторая величина крутящего момента превышает первую величину крутящего момента.
[0056] В некоторых реализациях настоящей технологии способ дополнительно включает: определение третьего углового положения ротора ЭПУ, третье угловое положение указывает на то, что ротор ЭПУ прошел второе заданное угловое положение, второе заданное угловое положение представляет собой положение верхней мертвой точки (ВМТ) поршня в камере сгорания; и впрыск топлива в камеру сгорания ДВС.
[0057] В некоторых реализациях настоящей технологии способ дополнительно включает: определение четвертого углового положения ротора ЭПУ, четвертое угловое положение указывает на то, что ротор ЭПУ прошел третье заданное угловое положение, третье заданное угловое положение идет после второго заданного положения; и воспламенение топлива в камере сгорания ДВС.
[0058] В некоторых реализациях настоящей технологии четвертое угловое положение меньше, чем 110 градусов угла поворота коленчатого вала после исходного углового положения.
[0059] В некоторых реализациях настоящей технологии четвертое угловое положение выбирается так, что воспламенение происходит до открытия выпускного отверстия в камере сгорания ДВС.
[0060] В пятом аспекте настоящая технология предусматривает двигатель внутреннего сгорания (ДВС), содержащий коленчатый вал, головку цилиндра, частично определяющую переменную камеру сгорания ДВС, форсунку непосредственного впрыска топлива, установленную на головке цилиндра, источник питания, электрическое поворотное устройство (ЭПУ), выполненное с возможностью вращения коленчатого вала, датчик абсолютного положения, выполненный с возможностью выдачи показаний углового положения ротора ЭПУ, и блок управления двигателем (БУД), функционально соединенный с датчиком абсолютного положения. БУД выполнен с возможностью векторного управления подачей электрического питания от источника питания на ЭПУ с учетом углового положения ротора ЭПУ и инициирования впрыска топлива форсункой непосредственного впрыска топлива в камеру сгорания в момент времени, выбранный с учетом углового положения, достигнутого ротором ЭПУ.
[0061] В некоторых реализациях настоящей технологии БУД вызывает подачу электрического питания от источника питания на ЭПУ для выработки первого уровня крутящего момента до достижения ротором ЭПУ первого заданного положения и последующей выработки второго уровня крутящего момента, превышающего первый уровень крутящего момента, когда поворот ротора ЭПУ переходит за первое заданное положение.
[0062] В некоторых реализациях настоящей технологии БУД вызывает впрыск топлива форсункой непосредственного впрыска топлива непосредственно в камеру сгорания после достижения ЭПУ первого заданного положения.
[0063] В некоторых реализациях настоящей технологии абсолютное угловое положение ротора ЭПУ соотносится с положением поршня в камере сгорания, при этом впрыск топлива происходит, когда поршень проходит положение верхней мертвой точки в камере сгорания.
[0064] В некоторых реализациях настоящей технологии БУД вызывает воспламенение топлива после впрыска топлива.
[0065] В шестом аспекте настоящая технология предусматривает способ управления подачей электрического питания между источником питания и электрическим поворотным устройством (ЭПУ). Пусковой сигнал подается на пусковой электронный переключатель питания для инициирования включения пускового электронного переключателя питания и обеспечения подачи электрического питания от источника питания на ЭПУ посредством пускового электронного переключателя питания. Сигнал подзарядки подается на оперативный электронный переключатель питания для инициирования включения оперативного электронного переключателя питания и обеспечения подачи электрического питания от ЭПУ на источник питания посредством оперативного электронного переключателя питания.
[0066] В некоторых реализациях настоящей технологии способ дополнительно включает прекращение подачи пускового сигнала на пусковой электронный переключатель питания при подаче сигнала подзарядки на оперативный электронный переключатель питания.
[0067] В некоторых реализациях настоящей технологии включение пускового электронного переключателя питания дополнительно включает периодическое включение и выключение пускового электронного переключателя питания для ограничения подачи электрического питания от источника питания на ЭПУ.
[0068] В некоторых реализациях настоящей технологии пусковой сигнал периодически подается и сбрасывается для инициирования периодического включения и выключения пускового электронного переключателя питания.
[0069] В некоторых реализациях настоящей технологии пусковой сигнал варьируется в соответствии с режимом широтно-импульсной модуляции.
[0070] В некоторых реализациях настоящей технологии способ дополнительно предусматривает цепь ограничения по току, последовательно соединенную с оперативным электронным переключателем питания, для ограничения подачи электрического питания от ЭПУ на источник питания.
[0071] В некоторых реализациях настоящей технологии способ дополнительно включает до подачи пускового сигнала на пусковой электронный переключатель питания подачу и последующий сброс сигнала включения на оперативный электронный переключатель питания
[0072] В некоторых реализациях настоящей технологии пусковой сигнал подается на пусковой электронный переключатель питания посредством первого драйвера, а сигнал подзарядки подается на оперативный электронный переключатель питания посредством второго драйвера.
[0073] В седьмом аспекте настоящая технология предусматривает цепь, состоящую из разрядной цепи и зарядной цепи. Разрядная цепь включает пусковой электронный переключатель питания, выполненный с возможностью подачи электрического питания от источника питания на электрическое поворотное устройство (ЭПУ) посредством пускового электронного переключателя питания, когда пусковой электронный переключатель питания находится во включенном состоянии. Зарядная цепь включает оперативный электронный переключатель питания, выполненный с возможностью подачи электрического питания от ЭПУ на источник питания посредством оперативного электронного переключателя питания, когда оперативный электронный переключатель питания находится во включенном состоянии.
[0074] В некоторых реализациях настоящей технологии разрядная цепь дополнительно включает первый драйвер, выполненный с возможностью приема пускового сигнала и направления пускового сигнала на пусковой электронный переключатель питания; а зарядная цепь дополнительно включает второй драйвер, выполненный с возможностью приема сигнала подзарядки и направления сигнала подзарядки на оперативный электронный переключатель питания.
[0075] В некоторых реализациях настоящей технологии цепь дополнительно включает блок управления, выполненный с возможностью подачи пускового сигнала на первый драйвер и подачи сигнала подзарядки на второй драйвер.
[0076] В некоторых реализациях настоящей технологии блок управления также выполнен с возможностью прекращения подачи пускового сигнала на пусковой электронный переключатель питания при подаче сигнала подзарядки на оперативный электронный переключатель питания.
[0077] В некоторых реализациях настоящей технологии блок управления также выполнен с возможностью периодической подачи и сбрасывания пускового сигнала на первый драйвер для ограничения подачи электрического питания от источника питания на ЭПУ.
[0078] В некоторых реализациях настоящей технологии блок управления также выполнен с возможностью варьирования пускового сигнала в соответствии с режимом широтно-импульсной модуляции.
[0079] В некоторых реализациях настоящей технологии зарядная цепь дополнительно включает цепь ограничения по току, последовательно соединенную с оперативным электронным переключателем питания и выполненную с возможностью ограничения подачи электрического питания от ЭПУ на источник питания.
[0080] В некоторых реализациях настоящей технологии блок управления также выполнен с возможностью подачи и последующего сбрасывания сигнала включения на оперативный электронный переключатель питания перед подачей пускового сигнала на пусковой электронный переключатель питания.
[0081] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут понятны из следующего описания, сопроводительных чертежей и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0082] Для улучшенного понимания настоящей технологии, а также ее других аспектов и дополнительных признаков, делается ссылка на следующее описание, которое следует использовать вместе с сопроводительными чертежами, где:
[0083] Фигура 1 представляет собой вид снегохода в перспективе справа сбоку;
[0084] Фигура 2 представляет собой вид в перспективе с передней левой стороны двигателя внутреннего сгорания снегохода по фигуре 1;
[0085] Фигура 3А представляет собой вид в вертикальном разрезе сзади двигателя по фигуре 2;
[0086] Фигура 3В представляет собой вид в вертикальном разрезе сзади другого двигателя внутреннего сгорания, который может быть установлен на снегоход по фигуре 1;
[0087] Фигура 4А представляет собой вид в поперечном сечении двигателя по фигуре 2, взятый по линии 4-4 на фигуре 3, показывающий поршень в положении верхней мертвой точки;
[0088] Фигура 4В представляет собой вид в поперечном сечении двигателя по фигуре 3В, показывающий поршень в положении нижней мертвой точки;
[0089] Фигура 4С представляет собой другой вид двигателя по фигуре 3В, показывающий размещение водяного насоса;
[0090] Фигура 5 представляет собой вид в поперечном сечении двигателя по Фигуре 2, взятый по линии 5-5 на Фигуре 4А, с ведущим блоком БКП, установленным на коленчатом валу двигателя;
[0091] Фигура 6 представляет собой схематическую диаграмму компонентов системы управления двигателем по Фигуре 2;
[0092] Фигура 7 представляет собой блок-диаграмму системы управления с двумя стратегиями для подачи электрического питания между конденсаторной емкостью и электрическим поворотным устройством (ЭПУ) по Фигуре 6;
[0093] Фигура 8 представляет собой блок-диаграмму схемы управления энергией для конденсаторной емкости по Фигуре 6;
[0094] Фигура 9 представляет собой логическую диаграмму способа запуска двигателя по Фигуре 2, в соответствии с реализацией;
[0095] Фигура 10 представляет собой временную диаграмму, показывающую пример вариаций сопротивлений крутящего момента двигателя с зависимостью от времени вместе с соответствующими вариациями скорости вращения двигателя;
[0096] Фигура 11 представляет собой логическую диаграмму способа запуска двигателя по Фигуре 2, в соответствии с другой реализацией;
[0097] Фигура 12 представляет собой диаграмму цепи, показывающую соединения между инвертором, конденсаторной емкостью и двигателем-генератором по Фигуре 6;
[0098] Фигура 13 представляет собой блок-диаграмму типичной реализации привода векторного управления;
[0099] Фигура 14 представляет собой блок-диаграмму электрической системы, в соответствии с реализацией настоящей технологии;
[00100] Фигура 15 представляет собой временную диаграмму, показывающую пример последовательности для изменения стратегии управления для подачи электрического питания между конденсаторной емкостью и электрическим поворотным устройством (ЭПУ) вместе с соответствующими вариациями скорости вращения двигателя;
[00101] Фигура 16 представляет собой другую временную диаграмму, показывающую пример влияния стратегий управления на обмен током между конденсаторной емкостью и ЭПУ и на напряжение системы;
[00102] Фигура 17 представляет собой еще одну временную диаграмму, показывающую пример изменения крутящего момента, действующего на ЭПУ при первой стратегии управлении;
[00103] Фигура 18 представляет собой диаграмму последовательности, показывающую операции способа для запуска двигателя внутреннего сгорания; и
[00104] Фигура 19 представляет собой диаграмму последовательности, показывающую операции способа для управления подачей электрического питания между источником питания и ЭПУ.
ПОДРОБНОЕ ОПИСАНИЕ
[00105] Способ и система для запуска двигателя внутреннего сгорания (ДВС), а также способ и система для вспомогательного запуска ДВС, будут описаны в отношении снегохода 10. Однако предполагается, что способ и система могут быть использованы в других транспортных средствах, таких как, но без ограничения, дорожные транспортные средства, транспортные средства для езды по бездорожью, мотоцикл, мопед, трехколесное автомобильное транспортное средство, лодка, приводимая подвесным двигателем или внутренним двигателем, и транспортное средство повышенной проходимости (ТСПП). Также предполагается, что способ и система могут быть использованы в устройствах, отличных от транспортных средств, которые имеют двигатель внутреннего сгорания, таких как генератор. Способ и система также будут описаны в отношении двухтактного, однорядного, двухцилиндрового двигателя внутреннего сгорания (ДВС) 24. Однако предполагается, что способ и система могут быть использованы с двигателем внутреннего сгорания, имеющим один или более цилиндров, и, в случае многоцилиндровых двигателей, имеющим однорядную или другую конфигурацию, таким как V-образный двигатель, а также 4-тактные двигатели.
Транспортное средство
[00106] Переходя теперь к Фигуре 1, снегоход 10 содержит передний конец 12 и задний конец 14, которые совместно определены в направлении движения снегохода 10 вперед. Снегоход 10 содержит раму 16, которая имеет туннель 18, опорную часть 20 двигателя и часть 22 переднего узла подвески. Туннель 18 состоит из одной или более частей листового металла, размещенных для образования вывернутой U-образной формы, которая спереди соединена с опорной частью 20 двигателя и проходит назад от нее вдоль продольной оси 23. ДВС 24 (схематически изображенный на Фигуре 1) установлен на опорной части 20 двигателя на раме 16. ДВС 24 более подробно описан ниже. Две лыжи 26 расположены на переднем конце 12 снегохода 10 и прикреплены к части 22 переднего узла подвески рамы 16 посредством узла 28 передней подвески. Узел 28 передней подвески содержит узлы 29 амортизатора, стойки 30 лыж и поддерживающие кронштейны 32. Шариковые шарниры и рулевые тяги (не показаны) функционально соединяют лыжи 26 с рулевой колонкой 34. Рулевое устройство в форме руля 36 прикреплено к верхнему концу рулевой колонки 34 для обеспечения возможности вращения приводом стоек лыж 30 и, следовательно, лыж 26, для управления снегоходом 10.
[00107] Бесконечная приводная гусеница 38 размещена в целом под туннелем 18 и функционально соединена с ДВС 24 через БКП 40 (схематически изображенную пунктирными линиями на Фигуре 1), которая будет описана более подробно ниже. Бесконечная приводная гусеница 38 приводится в действие вокруг узла 42 задней подвески для приведения снегохода 10 в движение. Узел 42 задней подвески содержит пару направляющих скольжения 44, находящихся в скользящем контакте с бесконечной приводной гусеницей 38. Узел 42 задней подвески также содержит множество амортизаторов 46, которые могут дополнительно содержать спиральные пружины (не показаны), окружающие один или более амортизаторов 46. Предусмотрены рычаги 48 и 50 подвески для прикрепления направляющих скольжения 44 к раме 16. В узле 42 задней подвески также предусмотрено множество паразитных колес 52. Также предполагаются другие типы и геометрии узлов задней подвески.
[00108] На переднем конце 12 снегохода 10 обтекатель 54 содержит ДВС 24 и БКП 40, тем самым обеспечивая наружную обшивку, которая защищает ДВС 24 и БКП 40. Обтекатель 54 содержит капот и одну или более боковых панелей, которые могут быть открыты для обеспечения возможности доступа к ДВС 24 и БКП 40, когда это необходимо, например, для осмотра или обслуживания ДВС 24 и/или БКП 40. Ветровой щит 56 соединен с обтекателем 54 вблизи переднего конца 12 снегохода 10. В качестве альтернативы, ветровой щит 56 может быть соединен непосредственно с рулем 36. Ветровой щит 56 действует в качестве ветрового стекла для понижения силы воздуха, воздействующей на водителя, при движении снегохода 10 вперед.
[00109] Сиденье 58 мотоциклетного типа расположено над туннелем 18. С противоположных сторон снегохода 10 под сиденьем 58 расположены подножки 60 для размещения ступней водителя.
Двигатель внутреннего сгорания
[00110] Обращаясь теперь к Фигурам 2-5, будут описаны ДВС 24 и БКП 40. Одна версия ДВС 24 показана на Фигурах 2, 3А, 4А и 5, а другая версия ДВС 24 показана на Фигурах 3В, 4В и 4С. В контексте настоящего раскрытия обе версии ДВС 24 являются равнозначными и взаимозаменяемыми. ДВС 24 функционирует по двухтактному принципу. ДВС 24 имеет коленчатый вал 100, который вращается вокруг горизонтально расположенной оси, которая проходит в целом поперек продольной оси 23 снегохода 10. Коленчатый вал приводит в действие БКП 40 для передачи крутящего момента на бесконечную приводную гусеницу 38 для приведения снегохода 10 в движение.
[00111] БКВ 40 содержит ведущий блок 62, соединенный с коленчатым валом 100 для вращения с коленчатым валом 100, и ведомый блок (не показан), соединенный с одним концом поперечно установленного передаточного вала (не показан), который поддерживается на раме 16 посредством подшипников. Противоположный конец поперечно установленного передаточного вала соединен с ведущим элементом редукторного привода (не показан), а ведомый элемент редукторного привода соединен с ведущим мостом (не показан), несущим зубчатые колеса (не показаны), которые образуют приводное соединение с приводной гусеницей 38.
[00112] Ведущий блок 62 БКП 40 содержит пару противоположно размещенных шкивов 64 и 66 ременной передачи в форме усеченного конуса, между которыми находится приводной ремень (не показан). Приводной ремень изготовлен из резины, но предполагается, что он может быть изготовлен из металлических звеньев или из полимера. Ведущий блок 62 будет более подробно описан ниже. Ведомый блок содержит пару шкивов ременной передачи в форме усеченного конуса, между которыми находится приводной ремень. Приводной ремень обмотан вокруг как ведущего блока 62, так и ведомого блока. Крутящий момент, передаваемый на ведомый блок, обеспечивает необходимую прижимную силу на приводной ремень через его механическое устройство, чувствительное к крутящему моменту, для эффективной передачи крутящего момента на другие компоненты силового агрегата.
[00113] Как описано выше, ведущий блок 62 содержит пару противоположно размещенных шкивов 64 и 66 ременной передачи в форме усеченного конуса, как можно увидеть на Фигуре 5. Оба шкива 64 и 66 вращаются вместе с коленчатым валом 100. Шкив 64 зафиксирован в осевом направлении относительно коленчатого вала 100 и, таким образом, называется фиксированным шкивом 64. Фиксированный шкив 64 также зафиксирован без возможности вращения относительно коленчатого вала 100. Шкив 66 может передвигаться вперед или назад от фиксированного шкива 64 в осевом направлении коленчатого вала 100 для изменения передаточного числа БКП 40 и, таким образом, называется подвижным шкивом 66. Как можно увидеть на Фигуре 5, фиксированный шкив 64 размещен между подвижным шкивом 66 и ДВС 24.
[00114] Фиксированный шкив 64 установлен на валу 68 фиксированного шкива. Фиксированный шкив 64 запрессован на валу 68 фиксированного шкива таким образом, что фиксированный шкив 64 вращается с валом 68 фиксированного шкива. Предполагается, что фиксированный шкив 64 может быть соединен с валом 68 фиксированного шкива другими известными способами для того, чтобы фиксированный шкив 64 был зафиксирован относительно вала 68 фиксированного шкива в осевом направлении и без возможности вращения. Как можно увидеть на Фигуре 5, вал 68 фиксированного шкива является полым и имеет усеченную полую часть. Усеченная полая часть принимает конец коленчатого вала 100 для передачи крутящего момента от ДВС 24 на ведущий блок 62. Соединитель 70 вставлен в наружный конец (т.е. на левой стороне Фигуры 5) ведущего блока 62, внутрь вала 68 фиксированного шкива, и вкручен в конец коленчатого вала 100 для предотвращения осевого смещения вала 68 фиксированного шкива относительно коленчатого вала 100. Предполагается, что вал 68 фиксированного шкива может быть соединен с коленчатым валом 100 другими известными способами для того, чтобы вал 68 фиксированного шкива был зафиксирован относительно коленчатого вала 100 в осевом направлении и без возможности вращения. Также предполагается, что коленчатый вал 100 может представлять собой вал 68 фиксированного шкива.
[00115] Крышка 72 вставлена в наружный конец вала 68 фиксированного шкива с помощью конусообразного соединения. Соединитель 70 также вставлен через крышку 72 для соединения крышки 72 с валом 68 фиксированного шкива. Предполагается, что крышка 72 может быть соединена с валом 68 фиксированного шкива с помощью других средств. Радиальная наружная часть крышки 72 образует кольцо 74. Кольцевой резиновый демпфер 76 соединен с кольцом 74. Другое кольцо 78 соединено с резиновым демпфером 76 таким образом, что резиновый демпфер 76 размещен между кольцами 74, 78. В настоящей реализации резиновый демпфер 76 вулканизирован к кольцам 74, 78, но предполагается, что они могут быть соединены друг с другом с помощью других средств, как, например, с помощью адгезива. Также предполагается, что демпфер 76 может быть изготовлен из материала, отличного от резины.
[00116] Ступица 80 размещена вокруг вала 68 фиксированного шкива и в осевом направлении между кольцом 78 и подвижным шкивом 66. Ступица 80 также зафиксирована в осевом направлении относительно фиксированного шкива 64. В кольце 74, демпфере 76 и кольце 78 выполнены отверстия (не показаны). Соединители (не показаны) вставлены через отверстия в кольце 74, демпфере 76, кольце 78 и ступице 80 для соединения кольца 78 со ступицей 80. В результате, крутящий момент передается между валом 68 фиксированного шкива и ступицей 80 через крышку 72, резиновый демпфер 76 и кольцо 78. Демпфер 76 демпфирует вариации крутящего момента от вала 68 фиксированного шкива, являющиеся результатом событий возгорания в ДВС 24. Таким образом, ступица 80 вращается с валом 68 фиксированного шкива.
[00117] Вал 82 подвижного шкива размещен вокруг вала 68 фиксированного шкива. Подвижный шкив 66 запрессован на валу 82 подвижного шкива таким образом, что подвижный шкив 66 вращается и передвигается в осевом направлении с валом 82 подвижного шкива. Предполагается, что подвижный шкив 66 может быть соединен с валом 82 подвижного шкива другими известными способами для того, чтобы подвижный шкив 66 был зафиксирован относительно вала 82 в осевом направлении и без возможности вращения. Также предполагается, что подвижный шкив 66 и вал 82 подвижного шкива могут быть выполнены как единое целое.
[00118] Для передачи крутящего момента от ступицы 80 на подвижный шкив 104 предусмотрен узел для передачи крутящего момента, состоящий из трех узлов 84 ролика, соединенных с подвижным шкивом 66. Узлы 84 ролика входят в зацепление со ступицей 80 так, чтобы обеспечивать осевое смещение подвижного шкива 66 с низким трением относительно ступицы 80 и чтобы устранять или, по меньшей мере, сводить к минимуму вращение подвижного шкива 66 относительно ступицы 80. Как описано выше, крутящий момент передается от фиксированного шкива 64 на ступицу 80 через демпфер 76. Ступица 80 входит в зацепление с узлами 84 роликов, которые передают крутящий момент на подвижный шкив 66 с отсутствием или с очень небольшим мертвым ходом. В результате, ступица 80 считается зафиксированной без возможности вращения относительно подвижного шкива 66. Предполагается, что в некоторых реализациях узел для передачи крутящего момента может иметь больше или меньше трех узлов 84 ролика.
[00119] Как можно видеть на Фигуре 5, прижимной элемент в форме спиральной пружины 86 размещен внутри полости 88, определенной радиально между валом 82 подвижного шкива и ступицей 80. По мере передвижения подвижного шкива 66 и вала 82 подвижного шкива в осевом направлении к фиксированному шкиву 64 пружина 86 сжимается. Пружина 86 смещает подвижный шкив 66 и вал 82 подвижного шкива от фиксированного шкива 64 к их положению, показанному на Фигуре 5. Предполагается, что в некоторых реализациях подвижный шкив 66 может быть смещен от фиксированного шкива 64 механизмами, отличными от пружины 86.
[00120] Ступица 80 имеет три плеча 90, размещенные на 120 градусах друг от друга. Три ролика 92 соединены с тремя плечами 90 ступицы 80 с возможностью вращения. Три центрифужных привода 94 шарнирно соединены с тремя кронштейнами (не показаны), образованными подвижным шкивом 66. Каждый ролик 92 выровнен с соответствующим одним из центрифужных приводов 94. Поскольку ступица 80 и подвижный шкив 66 зафиксированы без возможности вращения друг относительно друга, ролики 92 остаются выровненными с их соответствующими центрифужными приводами 94 при вращении валов 68, 82. Центрифужные приводы 94 размещены на 120 градусах друг от друга. Центрифужные приводы 94 и узлы 84 роликов размещены в шахматном порядке и размещены на 60 градусах друг от друга. Предполагается, что ролики 92 могут быть шарнирно соединены с кронштейнами подвижного шкива 66, и что центрифужные приводы 94 могут быть соединены с плечами 90 ступицы 80. Также предполагается, что может быть больше или меньше трех приводов 94, в случае чего будет соответствующее количество плеч 90, роликов 92 и кронштейнов подвижного шкива. Также предполагается, что ролики 92 могут быть опущены и заменены поверхностями, по которым могут скользить центрифужные приводы 94 по мере их вращения.
[00121] В настоящей реализации каждый центрифужный привод 94 содержит плечо 96, которое вращается вокруг моста 98, соединенного с его соответствующим кронштейном подвижного шкива 66. Положение плеч 96 относительно их мостов 98 может быть регулируемым. Предполагается, что положение плеч 96 относительно их мостов 98 может быть нерегулируемым. Дополнительные подробности в отношении центрифужных приводов по типу центрифужного привода 94 могут быть найдены в международной патентной публикации WO 2013/032463 А2, опубликованной 7 марта 2013 г., полное содержание которой включено в настоящий документ посредством ссылки.
[00122] Представленное выше описание ведущего блока 62 соответствует одной предполагаемой реализации ведущего блока, который может быть использован с ДВС 24. Дополнительные подробности в отношении ведущих блоков по типу ведущего блока 62 могут быть найдены в международной патентной публикации WO 2015/151032 А1, опубликованной 8 октября 2015 г., полное содержание которой включено в настоящий документ посредством ссылки. Предполагается, что могут быть использованы другие типы ведущих блоков.
[00123] ДВС 24 имеет картер 102, заключающий в себе часть коленчатого вала 100. Как можно увидеть на Фигурах 2, 3 и 5, коленчатый вал 100 выступает из картера 102. Предполагается, что коленчатый вал 100 может приводить в движение ведомый вал, соединенный непосредственно с концом коленчатого вала 100 или смещенный от коленчатого вала 100 и приводимый с помощью средств привода, таких как шестерни, для приведения ведущего блока 62 в движение. Также предполагается, что коленчатый вал 100 может приводить в движение, например, с помощью шестерней, вал противовеса, заключенный в части картера 102, и что ведущий блок 62 может быть соединен с валом противовеса, в случае чего, коленчатый вал 100 не должен выступать из картера 102 для этой цели. Блок 104 цилиндров размещен над картером 102 и соединен с ним. Блок 104 цилиндров, как показано, определяет два цилиндра 106А, 106В (Фигура 5). Головка 108 цилиндра размещена над блоком 104 цилиндров и соединена с ним.
[00124] Как наилучшим образом видно на Фигуре 5, коленчатый вал 100 поддерживается в картере 102 с помощью подшипников 110. Коленчатый вал 100 имеет две шатунных шейки 112А, 112В. В изображенной реализации, в которой два цилиндра 106А, 106 В размещены на одной линии, шатунные шейки 112А, 112B находятся на 180 градусах друг от друга. Предполагается, что шатунные шейки 112А, 112B могут находиться на других углах друг от друга для учета других схем размещения цилиндров, таких как в V-образном двигателе. Шатун 114А соединен с шатунной рейкой 112А на одном конце и с поршнем 116А через поршневой палец 118А на другом конце. Как можно видеть, поршень 116А имеет как минимум одно кольцо 117А под головкой и располагается в цилиндре 106А. Подобным образом, шатун 114B соединен с шатунной рейкой 112B на одном конце и с поршнем 116B через поршневой палец 118B на другом конце. Как можно видеть, поршень 116B имеет как минимум одно кольцо 117В под головкой и располагается в цилиндре 106 В. Вращение коленчатого вала 100 обуславливает совершение возвратно-поступательных движений поршнями 116А, 116B внутри их соответствующих цилиндров 106А, 106B. Головка 108 цилиндра, цилиндр 106А и головка поршня 116А определяют камеру 120А сгорания с переменным объемом между ними. Подобным образом, головка 108 цилиндра, цилиндр 106B и головка поршня 116B определяют камеру 120В сгорания с переменным объемом между ними. Предполагается, что блок 104 цилиндров может определять более двух цилиндров 106, в случае чего, ДВС 24 будет снабжен соответствующим количеством поршней 116 и шатунов 114.
[00125] Воздух подается в картер 102 через пару воздухозаборных отверстий 122 (только одно из которых показано на Фигуре 4А), выполненных в задней части блока 104 цилиндров. Пара корпусов 124 дроссельной заслонки соединена с парой воздухозаборных отверстий 122. Каждый корпус 124 дроссельной заслонки имеет дроссельную заслонку 126, которая может вращаться для управления потоком воздуха к ДВС 24. Двигатели (не показаны) используются для изменения положения дроссельных заслонок 126, но предполагается, что могут быть использованы тросы дросселя, соединенные с дроссельным рычагом. Также предполагается, что для изменения положения обеих дроссельных заслонок 126 может использоваться единый двигатель. В каждом воздухозаборном отверстии 122 предусмотрена пара пластинчатых клапанов 128 (Фигура 4А). Пластинчатые клапаны 128 обеспечивают возможность поступления воздуха в картер 102, но предотвращают выход воздуха из картера 102 через воздухозаборные отверстия 122.
[00126] По мере совершения поршнями 116А, 116B возвратно-поступательных движений воздух из картера 102 проходит в камеры 120А, 120B сгорания через продувочные отверстия 130. Топливо впрыскивается в камеры 120А, 120B сгорания форсунками 132а, 132b непосредственного впрыска топлива соответственно. Форсунки 132а, 132b непосредственного впрыска топлива установлены на головке 108 цилиндра. Форсунки 132а, 132b непосредственного впрыска топлива соединены топливопроводами и/или направляющими (не показаны) с одним или более топливными насосами (не показаны), которые откачивают топливо из топливного бака 133 (Фигура 1) снегохода 10. В изображенной реализации форсунки 132а, 132b непосредственного впрыска топлива представляют собой топливные форсунки Е-ТЕС™, однако предполагаются другие типы форсунок непосредственного впрыска топлива. Топливовоздушная смесь в камере 120А, 120B сгорания воспламеняется посредством свечей 134а, 134b зажигания соответственно (не показаны на Фигурах 2-5, но схематически изображены на Фигуре 6). Свечи 134а, 134b зажигания установлены на головке 108 цилиндра.
[00127] Для отведения отработанных газов, являющихся результатом сгорания топливовоздушной смеси в камерах 120А, 120B сгорания, каждый цилиндр 116А, 116B определяет одно основное выпускное отверстие 136А, 136B соответственно и два вспомогательных выпускных отверстия 138А, 138B соответственно. Предполагается, что каждый цилиндр 116А, 116B может иметь только одно, два или более трех выпускных отверстий. Также предполагается, что в ДВС 24 может быть добавлена система декомпрессии (не показана) для обеспечения декомпрессии в камерах 120А, 120B сгорания, когда ДВС 24 остановлен. Выпускные отверстия 136А, 136B (Фигуры 4А, 4В), 138А, 138B соединены с выпускным коллектором 140. Выпускной коллектор соединен с передней частью блока 104 цилиндров. Выпускные клапаны 142А, 142В, установленные на блоке 104 цилиндров, управляют степенью открытия выпускных отверстий 136А, 136B, 138А, 138B. В настоящей реализации выпускные клапаны 142А, 142В представляют собой выпускные клапаны R.A.V.E.™, но предполагаются другие типы клапанов. Также предполагается, что выпускные клапаны 142А, 142B могут быть опущены.
[00128] На Фигуре 4А поршень 116B показан в положении верхней мертвой точки (ВМТ). Фигура 4В представляет вид в поперечном сечении двигателя по фигуре 3В с поршнем 116B в положении нижней мертвой точки (НМТ), что обеспечивает лучший обзор основного выпускного отверстия 136B соответственно и вспомогательного выпускного отверстия 138B.
[00129] Электронное поворотное устройство (ЭПУ) соединено с концом коленчатого вала 100, являющимся противоположным концу коленчатого вала 100, который соединен с ведущим блоком 62. В настоящей реализации ЭПУ представляет собой двигатель-генератор 144 (Фигура 5), а именно двигатель-генератор 144 трехфазного переменного тока, такой как, например, синхронный двигатель с постоянным магнитом (СДГГМ), с внутренним постоянным магнитом (ВПМ) или с монтируемым на поверхности постоянным магнитом (МППМ), или двигатель с регулируемым магнитным сопротивлением (ДРМС). Предполагается, что двигатель-генератор может содержать ряд полюсных пар, вырабатывающих электрическое питание, циклирующее со скоростью, в несколько раз превышающей скорость вращения коленчатого вала 100. Кроме того, предполагается, что могут быть использованы другие типы двигателей-генераторов, в том числе, например, многофазные двигатели-генераторы или полифазные двигатели-генераторы. Также предполагается, что двигатель-генератор 144 может быть соединен с другим валом, функционально соединенным с коленчатым валом 100, с помощью, например, шестерней или ремней. Двигатель-генератор 144, как предполагается из его названия, может функционировать в качестве двигателя или в качестве генератора, и может переключаться между этими функциями. При некоторых условиях, как описано в настоящем документе ниже, двигатель-генератор 144 функционирует в режиме работы двигателя, питающегося или от небольшой батареи (не показана), или от конденсаторной емкости 145, показанной на Фигуре 3В.
[00130] Батарея, которая меньше и легче, чем таковая, которая обычно используется для холодного запуска ДВС 24, может быть использована для процедуры электрического запуска и/или для процедуры вспомогательного запуска, что будет описано в настоящем документе ниже. В качестве альтернативы, процедура электрического запуска и/или процедура вспомогательного запуска могут быть основаны на использовании конденсаторной емкости 145. Неограничивающие примеры конденсаторных емкостей включают конденсатор с высокой емкостью, ультраконденсатор (U-CAP), электрический двухслойный конденсатор и суперконденсатор. Небольшая батарея или конденсаторная емкость 145 подает электрическое питание на двигатель-генератор 144 для поворота коленчатого вала 100. Конденсаторная емкость 145 может аккумулировать относительно большие количества энергии. По меньшей мере в одной реализации конденсаторная емкость 145 содержит множество конденсаторов, собранных последовательно, каждый конденсатор из последовательности, возможно, содержит несколько конденсаторов, установленных параллельно, так что конденсаторная емкость 145 может выдерживать напряжения в целом в пределах диапазона рабочего напряжения форсунок 132А, 132В непосредственного впрыска топлива. В контексте настоящего раскрытия делаются ссылки на конденсаторную емкость 145, как на единый блок. Без ограничения и из соображений краткости, реализации, в которых процедура электрического запуска или процедура вспомогательного запуска, или обе, реализуются с помощью конденсаторной емкости 145, вместе с двигателем-генератором 144 будут описаны в настоящем документе ниже.
[00131] При функционировании в качестве генератора, двигатель-генератор 144 поворачивается коленчатым валом 100 и вырабатывает электричество, которое подается на конденсаторную емкость 145 и на другие электрические компоненты ДВС 24 и снегохода 10. Обмен электрическим питанием между конденсаторной емкостью 145 и двигателем-генератором 144 происходит через электрический преобразователь. В реализациях, в которых двигатель-генератор 144 представляет собой трехфазный двигатель, электрический преобразователь представляет собой трехфазный инвертор 146. Также предполагается использование многофазного или полифазного инвертора вместе с многофазным или полифазным двигателем-генератором. Стратегии управления двигателем-генератором 144, применимые к его функциями прокрутки двигателя и вырабатывания тока, и влияние этих стратегий на конденсаторную емкость 145 и на инвертор 146 описаны в настоящем документе ниже.
[00132] Как можно увидеть на Фигуре 5, двигатель-генератор 144 имеет статор 148 и ротор 150. Статор 148 размещен вокруг коленчатого вала 100 снаружи картера 102 и прикреплен к картеру 102. Ротор 150 соединен с помощью шпоночного паза с концом коленчатого вала 100 и частично заключает в себе статор 148. Корпус 152 размещен над двигателем-генератором 144 и соединен с картером 102. Накладка 154 соединена с концом корпуса 152.
[00133] Пользователю могут быть доступны три процедуры запуска снегохода 10. Первая процедура содержит процедуру ручного запуска, которая основана на использовании стартера 156 обратного хода. Вторая процедура запуска содержит процедуру электрического запуска. Третья процедура запуска содержит процедуру вспомогательного запуска. Одна или обе из процедур электрического и вспомогательного запуска могут присутствовать в любой реализации снегохода 10. Далее ниже будут описаны вторая и третья процедуры запуска. Как можно увидеть на Фигуре 5, стартер 156 обратного хода размещен внутри пространства, определенного корпусом 152 и накладкой 154, между накладкой 154 и двигателем-генератором 144. Стартер 156 обратного хода имеет шнур 158, намотанный вокруг катушки 160. Храповой механизм 162 выборочно соединяет катушку 160 с ротором 150. Для запуска ДВС 24 с помощью стартера 156 обратного хода при процедуре ручного запуска пользователь тянет за рукоятку 163 (Фигура 3А), соединенную с концом шнура 158. Это поворачивает катушку 160 в направлении, которое приводит к блокировке храпового механизма 162, тем самым поворачивая ротор 150 и коленчатый вал 100. Вращение коленчатого вала 100 приводит к совершению поршнями 116А, 116B возвратно-поступательных движений, что обеспечивает возможность осуществления впрыскивания топлива и воспламенения, тем самым запуская ДВС 24. Когда ДВС 24 запущен, вращение коленчатого вала 100 относительно катушки 160 выводит из зацепления храповой механизм 162 и, в результате, коленчатый вал 100 не поворачивает катушку 160. Когда пользователь отпускает рукоятку, пружина (не показана) поворачивает катушку 160, тем самым наматывая шнур 158 вокруг катушки 160.
[00134] В настоящей реализации как ведущий блок 62, так и двигатель-генератор 144, установлены на коленчатом валу 100. Предполагается, что как ведущий блок 62, так и двигатель-генератор 144, могут быть установлены на валу, отличном от коленчатого вала 100, таком как, например, вал противовеса. В настоящей реализации ведущий блок 62, двигатель-генератор 144 и стартер 56 обратного хода все вращаются вокруг оси вращения коленчатого вала 100 и расположены коаксиально с ней. Предполагается, что ведущий блок 62, двигатель-генератор 144 и стартер 56 обратного хода все могут вращаться вокруг оси вращения вала, отличного от коленчатого вала 100, такого как, например, вал противовеса, и расположены коаксиально с ней. Также предполагается, что, по меньшей мере, один из ведущего блока 62, двигателя-генератора 144 и стартера 56 обратного хода может вращаться вокруг другой оси. В настоящей реализации ведущий блок 62 размещен на одной стороне ДВС 24, а как двигатель-генератор 144, так и стартер 56 обратного хода, размещены на другой стороне ДВС 24. Предполагается, что двигатель-генератор и/или стартер 56 обратного хода могут быть размещены на той же стороне ДВС 24, что и ведущий блок 62.
Система управления двигателем внутреннего сгорания
[00135] Доступные процедуры запуска снегохода 10 содержат процедуру электрического запуска, процедуру вспомогательного запуска и процедуру ручного запуска. Фигура 6 представляет собой схематическую диаграмму компонентов системы управления двигателем по Фигуре 2. Управление компонентами, используемыми для запуска ДВС 24 в процедуре электрического запуска и в процедуре вспомогательного запуска, выполняется блоком управления двигателем (БУД) 164, установленном на ДВС 24, как показано на Фигурах 3В и 4В. Процедура вспомогательного запуска будет объяснена ниже. БУД 164 также используется для управления функционированием ДВС 24 после того, как он был запущен. БУД 164 включается от конденсаторной емкости 145, как будет описано ниже в настоящем документе. БУД 164 изображен в виде одного физического модуля (далее показан на Фигуре 14), содержащего один процессор (также на Фигуре 14), например, один микроконтроллер. Другие конфигурации находятся в пределах настоящего раскрытия. Например, предполагается, что признаки БУД 164 могут быть реализованы с помощью множества сопроцессоров, например, двух или более микроконтроллеров. Также предполагается, что различные задачи БУД 164 могут быть разделены между двумя или более микропроцессорами, интегрированными в один электронный модуль, или двумя или более микропроцессорами, распределенными по различным электронным модулям. В качестве неограничивающего примера, один электронный модуль может содержать первый процессор, выполненный с возможностью управления подачей электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 и для управления подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144, и второй процессор, выполненный с возможностью управления функцией впрыскивания топлива и функцией воспламенения ДВС. Для инициирования процедуры электрического запуска или процедуры вспомогательного запуска ДВС 24, БУД 164 принимает входные данные от компонентов, размещенных слева от БУД 164 на Фигуре 6, некоторые из которых являются необязательными и не присутствуют во всех реализациях, как будет описано ниже. Используя эти входные данные, БУД 164 получает информацию от карт 166 управления в отношении того, каким образом следует управлять компонентами, размещенными справа от БУД 164 на Фигуре 6, для запуска ДВС 24. Карты 166 управления хранятся в электронном устройстве для хранения данных, таком как электрически-стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) или флэш-накопитель. Предполагается, что вместо или в дополнение к картам 166 управления, БУД 164 может использовать алгоритмы управления для управления компонентами, размещенными справа от БУД 164 на Фигуре 6. В настоящей реализации БУД 164 соединен с различными компонентами, изображенными на Фигуре 6, через проводные соединения; однако предполагается, что он может быть соединен с одним или более из этих компонентов беспроводным образом.
[00136] Активируемый пользователем переключатель 168 электрического запуска, которым снабжен снегоход 10, например, командная кнопка, установленная на руле 36 или вблизи него, отправляет сигнал на БУД 164 о том, что пользователь желает запустить ДВС 24, когда он активирован. Переключатель 168 электрического запуска также может представлять собой переключатель, активируемый ключом, датчик или любой другой тип устройства, с помощью которого пользователь может выдать входные данные на БУД 164 о том, что ДВС 24 подлежит запуску. По меньшей мере, в одной реализации переключатель 168 электрического запуска может представлять собой датчик, функционально соединенный со шнуром 158 стартера 156 обратного хода и с БУД 164. Некоторая тяга, например, простое дерганье оператором за шнур 158, может быть обнаружена этим датчиком, приводя к инициированию процедуры электрического запуска ДВС 24, при условии наличия всех условий для процедуры электрического запуска.
[00137] Датчик 171 положения коленчатого вала (ДПКВ) и датчик 170 абсолютного положения коленчатого вала (ДАПКВ) расположены рядом с коленчатым валом 100 для распознавания абсолютного положения коленчатого вала 100. Показания ДПКВ 170 используются БУД 164 для определения частоты вращения коленчатого вала 170. В результате ручного запуска или вспомогательного запуска ДПКВ 170 включается от начального вращения коленчатого вала 100. Аналогично БУД 164, ДАПКВ 170 включается от конденсаторной емкости 145. В одной реализации ДАПКВ 170 электрически соединен с конденсаторной емкостью 145 таким образом, что ДАПКВ 170 постоянно находится во включенном состоянии в течение всего времени, пока в конденсаторной емкости 145 присутствует минимальный уровень заряда. В другой реализации ДАПКВ 170 включается от конденсаторной емкости 145 через БУД 164 в ходе процедуры запуска, как будет описано в настоящем документе ниже. В настоящей реализации ДПКВ 171 представляет собой индуктивный датчик положения, а ДАПКВ 170 представляет собой кодовый датчик sin/cos на основе эффекта Холла. На Фигуре 5 показан пример размещения ДАПКВ 170 на основе эффекта Холла, который расположен в крайней точке коленчатого вала 100 и вращает коленчатый вал 100. В качестве альтернативы ДАПКВ 170 может включать оптический датчик. На Фигуре 5 также показан ДПКВ 171, расположение которого обеспечивает ему возможность отслеживания движения ротора 150 двигатель-генератора 144, причем ротор 150 вращается синхронно и с той же скоростью, что и коленчатый вал 100. ДАПКВ 170 распознает абсолютное положение коленчатого вала 100 в непрерывном режиме в течение всего времени, пока ДАПКВ 170 питается от электрического источника питания (показан на дальнейших Фигурах). ДАПКВ 170 отправляет сигнал, являющийся показательным в отношении абсолютного положения коленчатого вала 100, на БУД 164. Абсолютное положение коленчатого вала 100, выданное ДАПКВ 170, позволяет БУД 164 определять текущее положение поршней 116А, 116B независимо от того, вращается ли коленчатый вал 100 или остановлен в любом положении. В частности, БУД 164 использует предоставленную информацию об абсолютном положении для определения текущего положения поршней 116А, 116B по отношению к их соответствующим положениям верхней мертвой точки (ВМТ). Текущее положение поршня по отношению к его положению ВМТ может быть выражено в градусах угла поворота до ВМТ (ДВМТ) или после ВМТ (ПВМТ). С учетом изменений абсолютного положения коленчатого вала 100, полученных от ДАПКВ 170, БУД 164 также может определять частоту вращения коленчатого вала 100.
[00138] Предполагается, что датчик абсолютного положения (не показан) может кроме того определять абсолютное положение компонента ДВС 24, отличного от коленчатого вала 100, который вращается синхронно с коленчатым валом 100, например, водяного насоса. Фигура 4С представляет собой другой вид двигателя по Фигуре 2, показывающий размещение водяного насоса, в общем случае, 173. В реализации водяной насос 173 вращается с той же скоростью, что и коленчатый вал 100. На водяном насосе 173 смонтирован магнит 175. Датчик 177 на основе эффекта Холла находится в зафиксированном положении и отслеживает вращательные движения магнита 175, когда вращение коленчатого вала 100 вызывает вращение водяного насоса 173. Другие компоненты ДВС 24, на котором может быть установлен датчик абсолютного положения, включают, к примеру и без ограничений, ротор 150 двигатель-генератора 144, топливный насос, масляный насос, кулачковый вал (если ДВС представляет собой 4-тактный двигатель), уравновешивающий вал (эти компоненты не показаны) и тому подобное. В этом случае, исходя из механической конфигурации ДВС 24, БУД 164 может установить абсолютное положение коленчатого вала 100 по абсолютному положению данного компонента.
[00139] БУД 164 управляет работой и согласованием времени действия форсунок 132а, 132b непосредственного впрыска топлива и свечей 134а, 134b зажигания. С этой целью при запуске ДВС 24, БУД 164 использует абсолютное положение коленчатого вала 100, полученное от ДАПКВ 170, для инициирования впрыска расчетного количества топлива форсунками 132а, 132b непосредственного впрыска топлива в соответствующие камеры 120А, 120B сгорания вскоре после того, как поршни 116А, 116B достигнут положений ВМТ. Затем БУД 164 вызывает воспламенение топлива соответствующими свечами 134а, 134b зажигания сразу после этого. К примеру и без ограничений, впрыск в камеру 120А сгорания может произойти, если коленчатый вал 100 повернулся до достижения поршнем 116А положения в диапазоне приблизительно от 3 градусов до ВМТ до 7 градусов после ВМТ. Затем происходит воспламенение с использованием свечи 134 зажигания в камере 1220А сгорания, например в диапазоне приблизительно от 0 до 12 градусов после ВМТ (0-12 градусов ПВМТ) для поршня 116А. Время впрыска и воспламенения может варьироваться в зависимости от условий эксплуатации ДВС 24.
[00140] Процедура вспомогательного запуска может быть инициирована при условии, что описанные в настоящем документе ниже условия соблюдены, когда вращение коленчатого вала 100 инициировано пользователем, тянущим за шнур 158 стартера 156 обратного хода. После начального вращения коленчатого вала 100 ДПКВ 171 активизирует БУД 164. В свою очередь БУД 164 инициирует возбуждение ДАПКВ 170 конденсаторной емкостью 145, что позволяет ДАПКВ 170 передать на БУД 164 информацию об абсолютном угловом положении коленчатого вала 100.
[00141] Датчик 167 напряжения, например, вольтметр, выдает измерения напряжения конденсаторной емкости 145 на БУД 164. Как разъяснено в настоящем документе более подробно ниже, БУД 164 использует это измерение напряжения для определения того, достаточно ли запаса энергии конденсаторной емкости 145 для запуска ДВС 24 с помощью процедуры электрического запуска или для оказания помощи при процедуре вспомогательного запуска.
[00142] В некоторых случаях для определения того, может ли быть запущен двигатель с помощью процедуры электрического запуска или процедуры вспомогательного запуска, могут быть использованы другие датчики, как разъяснено ниже в настоящем документе. Эти необязательные датчики включают, например, датчик 172 температуры двигателя, датчик 174 температуры воздуха, датчик 176 атмосферного давления воздуха, датчик 178 температуры выхлопных газов, таймер 180 и датчик 182 температуры БУД.
[00143] Датчик 172 температуры двигателя установлен на ДВС 24 для обнаружения температуры одного или более из картера 102, блока 104 цилиндров, головки 108 цилиндра, и температуры охлаждающей жидкости двигателя. Датчик 172 температуры двигателя отправляет сигнал, являющийся показательным в отношении обнаруженной температуры, на БУД 164.
[00144] Датчик 174 температуры воздуха установлен на снегоходе 10, например, в воздухозаборной системе, для обнаружения температуры воздуха, подаваемого в ДВС 24. Датчик 174 температуры воздуха отправляет сигнал, являющийся показательным в отношении температуры воздуха, на БУД 164.
[00145] Датчик 176 атмосферного давления воздуха установлен на снегоходе 10, например, в воздухозаборной системе, для обнаружения атмосферного давления воздуха. Датчик 176 атмосферного давления воздуха отправляет сигнал, являющийся показательным в отношении атмосферного давления воздуха, на БУД 164.
[00146] Датчик 178 температуры выхлопных газов установлен на выпускном коллекторе 140 или другой части выхлопной системы снегохода 10 для обнаружения температуры выхлопных газов. Датчик 178 температуры выхлопных газов отправляет сигнал, являющийся показательным в отношении температуры выхлопных газов, на БУД 164.
[00147] Таймер 180 соединен с БУД 164 для выдачи информации в отношении количества времени, пройденного с момента остановки ДВС 24, на БУД 164. Таймер 180 может представлять собой активный таймер, который запускается тогда, когда ДВС 24 останавливается. В качестве альтернативы, функция таймера 180 может быть получена из календаря и функции часов БУД 164 или другого электронного компонента. В такой реализации БУД 164 записывает в логи время и дату, когда ДВС 24 был остановлен, и ищет эти данные для определения того, как много времени прошло с момента остановки ДВС 24, когда БУД 164 принимает сигнал от переключателя 168 электрического запуска о том, что пользователь желает запустить ДВС 24.
[00148] Датчик 182 температуры БУД установлен на физическом модуле (не показан), который содержит один или более процессоров (не показаны), выполненных с возможностью реализации функций БУД 164. Датчик 182 температуры БУД отправляет сигнал, являющийся показательным в отношении температуры этого модуля, на БУД 164.
[00149] Предполагается, что один или более датчиков 172, 174, 176, 178, 182 и таймер 180 могут быть опущены. Также предполагается, что один или более датчиков 172, 174, 176, 178, 180, 182 и таймер 180 могут быть использованы только при определенных условиях. Например, датчики 178, 180 температуры выхлопных газов и давления могут быть использованы только тогда, когда ДВС 24 недавно был остановлен, в случае чего некоторые выхлопные газы по-прежнему будут присутствовать в выхлопной системе, или после первого возгорания топливовоздушной смеси в одной или более камер 120А, 120B сгорания.
[00150] БУД 164 использует входные данные, принятые, по меньшей мере, от некоторых из переключателя 168 электрического запуска, датчиков 167, 170, 171, 172, 174, 176, 178, 182 и таймера 180, для извлечения одной или более соответствующих карт 166 управления и для управления двигателем-генератором 144, форсунками 132а, 132b непосредственного впрыска топлива и свечами 134а, 134b зажигания с помощью этих входных данных и/или карт 166 управления с целью запуска ДВС 24, в зависимости от ситуации. Входные данные и карты 166 управления также используются для управления функционированием ДВС 24 сразу после того, как он был запущен. Хотя это не показано на Фигуре 6 в целях упрощения иллюстрации, различные компоненты системы управления на Фигуре 6 включаются от конденсаторной емкости 145.
[00151] БУД 164 также соединен с дисплеем 186, которым снабжен снегоход 10, вблизи руля 36 для выдачи информации пользователю снегохода 10, такой как, например, скорость двигателя, скорость транспортного средства, температура масла и уровень топлива.
[00152] Переходя теперь к Фигуре 7, будут описаны подробности электронной системы для процедур электрического и вспомогательного запуска ДВС 24. Фигура 7 представляет собой блок-диаграмму системы управления с двумя стратегиями для подачи электрического питания между конденсаторной емкостью и ЭПУ по Фигуре 6. Некоторые компоненты, включенные в представленное выше описание Фигуры 6, воспроизведены на Фигуре 7 для более подробного представления их функционирования.
[00153] Подача электрического питания между конденсаторной емкостью 145 и двигателем-генератором 144 происходит через инвертор 146. БУД 164 включает или иным образом функционально соединен с переключателем 184 стратегий, который выполнен с возможностью изменения стратегии управления для подачи электрического питания между конденсаторной емкостью 145 и двигателем-генератором 144 между, по меньшей мере, двумя (2) различными стратегиями управления. БУД 164 управляет инвертором 146 через переключатель 184 стратегий.
[00154] Для запуска ДВС 24 с помощью процедуры электронного запуска, пользователь снегохода 10 вводит входные данные в переключатель 168 электрического запуска, например, путем нажатия на командную кнопку. БУД 164 информируется об этой команде. В ответ БУД 164 может управлять подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 на основе заранее определенного значения крутящего момента, или запроса крутящего момента, достаточного для приведения коленчатого вала 100 во вращение для запуска ДВС 24. В варианте БУД 164 может определять запрос крутящего момента. Определение запроса крутящего момента выполняется с учетом того, что ожидается, что ДВС 24 будет иметь сопротивление крутящего момента с высокой степенью неоднородности; в качестве альтернативы, вместо определения запроса крутящего момента, БУД 164 может определять запрос скорости, применяемой к коленчатому валу 100, для управления количеством питания, которое двигатель-генератор 144 должен подать на коленчатый вал 100 для запуска ДВС 24. Напряжение конденсаторной емкости 145 обнаруживается датчиком 167 напряжения и выдается на БУД 164. Если это напряжение ниже порогового значения VMinE напряжения электрического запуска, которое составляет минимальное напряжение конденсаторной емкости 145 для процедуры электрического запуска, БУД 164 определяет то, что конденсаторная емкость 145 не имеет достаточно энергии для выдачи запроса крутящего момента или запроса скорости, достаточной для запуска ДВС 24 с помощью процедуры электрического запуска. Следовательно, БУД 164 не разрешает запуск ДВС 24 с помощью процедуры электрического запуска и активирует дисплей 186 для отображения индикации «ручного запуска» или индикации «вспомогательного запуска» в реализациях, где эта опция доступна. Если говорить в общем, пороговое значение VMinE напряжения электрического запуска основано на определении достаточного заряда конденсаторной емкости 145, обеспечивающего возможность успешной процедуры электрического запуска в большинстве рабочих условий. Если это минимальное пороговое значение напряжения для процедуры электрического запуска соблюдено, БУД 164 активирует подачу электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 через инвертор 146 в первой стратегии управления, инициируя вращение коленчатого вала 100. БУД 164 также приводит в действие форсунки непосредственного впрыска топлива 132а и 132b для непосредственного впрыска топлива в камеры 120А, 120B сгорания и приводит в действие свечи 134а и 134b зажигания для воспламенения топлива в камерах 120А, 120B сгорания. Как указано в настоящем документе выше, ДВС 24 может содержать один или более цилиндров, а указание на две (2) камеры 120А и 120B сгорания сделано лишь в целях иллюстрации. Если эти операции успешны, вращение коленчатого вала 100 достигает минимального порогового значения вращения, соответствующего успешному запуску ДВС 24. После этого, когда скорость коленчатого вала 100 равна или выше минимального порогового значения вращения, БУД 164 управляет подачей электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 по-прежнему через инвертор 146 для активации зарядки конденсаторной емкости 145. Подача электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 в целом выполняется во второй стратегии управления, отличающейся от первой стратегии управления. Также предполагается вариант, в котором подача электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 выполняется в первой стратегии управления при низких скоростях вращения коленчатого вала 100 или при низких потребностях в торможении и во второй стратегии управления при высоких скоростях вращения коленчатого вала 100.
[00155] Датчик 188 тока может быть использован для оптимизации потребления тока конденсаторной емкости 145 и оптимизации использования ее энергии. Датчик 188 тока выдает на БУД 164 индикацию об энергии от конденсаторной емкости 145, потребляемой во время процедуры электрического запуска. В реализации датчик 188 тока содержит комбинацию датчиков фазового тока (явным образом не показаны), предусмотренных на двух (2) фазах двигателя-генератора 144. Кодирование измерений с этих двух (2) датчиков фазового тока выдает надежную оценку тока, протекающего между конденсаторной емкостью 145 и двигателем-генератором 144. Как показано на Фигуре 13, измерения тока могут быть получены по всем трем (3) фазам двигателя-генератора 144. В качестве альтернативы, использование энергии конденсаторной емкости 145 может быть оптимизировано без датчиков тока, например, может быть использован подход с незамкнутым контуром, имеющим заранее определенный шаблон запроса крутящего момента, применяемый БУД 164 для активации всех последовательностей проворачивания. Также возможно оптимизировать использование энергии конденсаторной емкости 145 на основе запроса скорости с надежно настроенными регуляторами или на основе заранее определенного шаблона многошаговых запросов скорости.
[00156] Электрический запуск ДВС 24 может быть безуспешным даже если исходные условия для процедуры электрического запуска изначально присутствовали. Например, это может произойти, если во время подачи электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 датчик 167 напряжения обнаруживает, что напряжение конденсаторной емкости 145 падает ниже порогового значения VMinR остаточного напряжения, которое ниже порогового значения VMinE напряжения электрического запуска, перед тем, как скорость вращения коленчатого вала 100 достигает минимального порогового значения вращения, соответствующего успешному запуску ДВС 24. При таких условиях БУД 164 прекращает подачу питания от конденсаторной емкости 145 на двигатель-генератор 144 и приводит в действие дисплей 186 для выдачи индикации ручного запуска или индикации вспомогательного запуска в реализациях, где эта опция доступна. Если говорить в общем, пороговое значение VMinR остаточного напряжения соответствует минимальному заряду конденсаторной емкости 145, которое, как ожидается, является достаточным для обеспечения возможности впрыскивания топлива в камеры 120А, 120B сгорания и его воспламенения, причем коленчатый вал 100 продолжает вращение.
[00157] Для запуска ДВС 24 с помощью процедуры вспомогательного запуска пользователь снегохода 10 тянет за шнур 158 стартера 156 обратного хода, инициируя вращение коленчатого вала 100. После начального вращения коленчатого вала 100 ДПКВ 171 активизирует БУД 164, а затем ДАПКВ 170 передает на БУД 164 информацию об абсолютном угловом положении коленчатого вала 100. В ответ БУД 164 может управлять подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 для помощи в приведении коленчатого вала 100 во вращение для запуска ДВС 24. В некоторых случаях напряжение конденсаторной емкости 145 обнаруживается датчиком 167 напряжения и выдается на БУД 164. В данном случае, если это напряжение ниже порогового значения VMinA напряжения вспомогательного запуска, которое составляет минимальное напряжение конденсаторной емкости 145 для процедуры вспомогательного запуска, БУД 164 определяет то, что конденсаторная емкость 145 не имеет достаточно энергии для содействия запуску ДВС 24, и БУД 164 не позволяет запуск ДВС 24 с помощью процедуры вспомогательного запуска, вместо этого приводя дисплей 186 в действие для отображения индикации «ручного запуска». Если говорить в общем, пороговое значение VMinA напряжения вспомогательного запуска основано на определении достаточного заряда конденсаторной емкости 145, обеспечивающего возможность успешной процедуры вспомогательного запуска в заранее определенных рабочих условиях. В реализациях, в которых присутствует процедура как электрического запуска, так и вспомогательного запуска, пороговое значение VMinA напряжения вспомогательного запуска ниже, чем пороговое значение VMinE напряжения электрического запуска. Если это минимальное пороговое значение напряжения для процедуры вспомогательного запуска соблюдено, БУД 164 активирует подачу электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 через инвертор 146 в первой стратегии управления, содействуя вращению коленчатого вала 100. БУД 164 также приводит в действие форсунки непосредственного впрыска топлива 132а и 132b для непосредственного впрыска топлива в камеры 120А, 120B сгорания и приводит в действие свечи 134а и 134b зажигания для воспламенения топлива в камерах 120А, 120B сгорания. Как указано в настоящем документе выше, ДВС 24 может содержать один или более цилиндров, а указание на две (2) камеры 120А и 120B сгорания сделано лишь в целях иллюстрации. Если эти операции успешны, вращение коленчатого вала 100 достигает минимального порогового значения вращения, соответствующего успешному запуску ДВС 24. После этого ДВС 24 функционирует так, как разъяснено в представленном выше описании процедуры электрического запуска.
[00158] Фигура 8 представляет собой блок-диаграмму схемы управления энергией для конденсаторной емкости 145 по Фигуре 6. Цепь 200 показывает, как в реализации электрически соединены ДПКВ 171, БУД 164 и конденсаторная емкость 145. В случае процедуры электрического запуска соединение между конденсаторной емкостью 145 и БУД 164 осуществляется с помощью переключателя электрического запуска 168, который изображен в виде кнопки. В случае процедуры вспомогательного запуска и в случае процедуры ручного запуска соединение осуществляется посредством сигнала от ДПКВ 171, присутствующего в начале вращения коленчатого вала 100. Конденсаторная емкость 145 изображена в виде суммы конденсаторов 202 меньшего размера, соединенных последовательно. Как указано ранее, каждый из этих конденсаторов 202 меньшего размера в действительности может состоять из множества конденсаторов, соединенных параллельно. Каждый из конденсаторов 202 меньшего размера может выдерживать относительно низкое напряжение, примененное к нему. Конденсаторная емкость 145, образованная последовательной суммой конденсаторов 202 меньшего размера, может выдерживать номинальное напряжение цепи 200, которое также представляет собой номинальное напряжение электрических систем снегохода 10, с добавлением коэффициента запаса для внезапного перенапряжения
[00159] Цепь 200 выдает выходное напряжение между отведением 208 и заземлением 210, когда цепь 200 активна. Когда цепь 200 неактивна, конденсаторная емкость 145 отсоединена от заземления 210 посредством силовых электронных переключателей, например, транзисторов Q1 и Q2 на эффекте металл-оксид-полупроводник (МОП), которые в это время выключены и, следовательно, открывают цепь. Также предполагается замена МОП-транзисторов Q1 и Q2 биполярным транзистором, например, биполярным транзистором с изолированным затвором (БТИЗ). Имеющееся напряжение конденсаторной емкости 145 определяется между клеммами 208 и 210, которые электрически соединены с датчиком 167 напряжения, показанным на представленных ранее Фигурах.
[00160] Конденсатор С1, показанный на Фигурах 3В и 4В и схематически представленный на Фигуре 8, находится между отведением 208 и заземлением 210. Ролью конденсатора С1 является фильтрация вариаций напряжения от конденсаторной емкости 145 в пользу различных электрических компонентов снегохода 10, в том числе, например, форсунок 132а и 132b непосредственного впрыска топлива, фар и тому подобного. В некоторых реализациях конденсатор С1 может быть опущен. Напряжение между отведением 208 и заземлением 210, которое является напряжением системы для снегохода 10, является приблизительно таким же, как и номинальное напряжение конденсаторной емкости 145, хотя рабочие напряжения между различными состояниями системы могут не быть постоянными все время.
[00161] Когда ДВС 24 был остановлен на протяжении продолжительного времени, например, более нескольких часов, напряжение на конденсаторной емкости 145 падает ниже порогового значения VMinE напряжения электрического запуска и ниже порогового значения VMinA вспомогательного запуска, и цепь 200 не запитывается. Таким образом, для запуска ДВС 24 требуется обращение к процедуре ручного запуска. Когда ДВС 24 был остановлен на протяжении относительно непродолжительного времени, длительность чего в большей части зависит от способности к накоплению энергии конденсаторной емкостью 145, напряжение на конденсаторной емкости 145 может быть равно или выше порогового значения VMinE напряжения электрического запуска, в случае чего доступна процедура электрического запуска. Если напряжение конденсаторной емкости 145 ниже порогового значения VMinE напряжения электрического запуска, но при этом, по меньшей мере, равно или больше порогового значения VMinA вспомогательного запуска, может быть доступна процедура вспомогательного запуска. Ниже в настоящем документе более подробно описана процедура вспомогательного запуска.
[00162] Когда напряжение конденсаторной емкости 145, по меньшей мере, равно или больше порогового значения VMinE напряжения электрического запуска, нажатие переключателя 168 электрического запуска (командной кнопки) пользователем активирует процедуру электрического запуска. Это действие пользователя обнаруживается детектором 212 команды запуска БУД 164. Когда пользователь начинает процедуру ручного запуска или процедуру вспомогательного запуска, ДПКВ 171 включается и оправляет сигнал включения на детектор 212 команды запуска.
[00163] Детектор 212 команды запуска активизирует БУД 164. В то же время начинается подача электрического питания от конденсаторной емкости 145 на ЭПУ 164. В зависимости от конкретных реализаций, детектор 212 команды запуска может принять простой краткий электрический контакт, обеспеченный переключателем электрического запуска 168, для инициирования процедуры электрического запуска. В качестве альтернативы, детектор 212 команды запуска может требовать удержания в нажатом положении переключателя 168 электрического запуска в течение нескольких секунд. После обнаружения команды на электрический запуск или сигнала включения, детектор 212 команды запуска отправляет сигнал на цепь 214 пробуждения БУД 164. Цепь 214 пробуждения управляет следующими операциями.
[00164] Первоначально цепь 214 пробуждения подает сигнал 220 включения на драйвер 216 транзистора Q1, который представляет собой оперативный электронный переключатель питания. Далее драйвер 216 подает сигнал включения на транзистор Q1, что приводит к включению транзистора Q1 и позволяет конденсаторной емкости 145 начать зарядку конденсатора С1 через цепь 224 ограничения по току. Как только в конденсаторе С1 начинает устанавливаться напряжение, цепь 214 пробуждения прерывает сигнал 220 включения и подает пусковой сигнал 221 на драйвер 217 транзистора Q2, который представляет собой пусковой электронный переключатель питания, что эффективно включает конденсаторную емкость 145 параллельно с конденсатором С1 для дальнейшей зарядки конденсатора С1. В реализации цепь 214 пробуждения управляет драйвером 217 для многократного включения и выключения транзистора Q2 с высокой частотой для предотвращения протекания избыточного тока от конденсаторной емкости 145 на конденсатор С1. Например, цепь 216 пробуждения БУД 164 может варьировать пусковой сигнал 221 в соответствии с режимом широтно-импульсной модуляции (ШИМ). Электрической проводимостью через транзистор Q2 можно управлять сначала с небольшим циклом нагрузки, увеличивающимся со снижением разницы напряжения между конденсатором С1 и конденсаторной емкостью 145. Вне зависимости от этого, конденсатор С1 быстро заряжается для достижения напряжения конденсаторной емкости 145. В результате такого уравнивания напряжение конденсаторной емкости 145 может незначительно снижаться, но этот эффект ограничен тем фактом, что конденсатор С1 намного меньше конденсаторной емкости 145. После того, как конденсатор С1 зарядится, устанавливается электрическое соединение между отведением 208 и датчиками 167, 170, 171, 172, 174, 176 и 182, таймером 180 и другими компонентами снегохода 10, которые могут включиться в то же время или позже, в зависимости от потребностей применения.
[00165] В реализации, где конденсатор С1 отсутствует, цепь 214 пробуждения может не подавать сигнал 220 включения на драйвер 216. В этом случае в ответ на сигнал от детектора 212 команды запуска цепь 214 пробуждения просто подает пусковой сигнал 221 на драйвер 217 транзистора Q2 так, что напряжение конденсаторной емкости 145 становится доступным на отведении 208.
[00166] В реализации, где ДАПКВ 170 не постоянно соединен с конденсаторной емкостью 145, он включается при начале процедуры запуска посредством отведения 208 после такого уравнивания напряжения, чтобы обеспечить возможность считывания текущего (т.е. исходного) абсолютного углового положения коленчатого вала. Это показание передается от ДАПКВ 170 на БУД 164. Затем электрический запуск продолжается, при этом БУД 164 контролирует подачу питания от конденсаторной емкости 145 на двигатель-генератор 144 через отведение 208, которое соединено с инвертором 146 одним из способов, описанных в отношении следующих Фигур. БУД 164 может управлять транзистором Q2 в режиме ШИМ для ограничения уровня подачи электрического питания от конденсаторной емкости 145 на двигатель-генератор 144.
[00167] После того, как процедура электрического запуска успешно завершится, при холостом ходе ДВС 24 двигатель-генератор 144 может изначально иметь ограниченную емкость вырабатывания энергии. Вспомогательные приспособления снегохода 10, в том числе, например, форсунки 132а и 132b непосредственного впрыска топлива и фары, требуют некоторого количества питания. Для функционирования транспортного средства более важно запитать эти вспомогательные приспособления, чем перезарядить конденсаторную емкость 145. Для того, чтобы предотвратить чрезмерное падение напряжения конденсатора С1, на отведении 208 при холостом ходе или в процессе работы ДВС 24 БУД 164 в некоторых случаях может управлять драйвером 217 для выключения транзистора Q2 до тех пор, пока коленчатый вал 100 не станет вращаться со скоростью, большей заранее определенного порогового значения вращения.
[00168] После того, как ДВС 24 достигнет достаточного числа оборотов, и напряжение на отведении 208 станет достаточным, БУД 164 останавливает подачу пускового сигнала 221 на драйвер 217, что приводит к отключению (размыканию) транзистора Q2. БУД 164 также отправляет сигнал 222 подзарядки на драйвер 216 транзистора Q1. Затем драйвер 216 передает сигнал подзарядки на транзистор Q1, что приводит к включению (замыканию) транзистора Q1. Транзистор Q1 последовательно соединен с цепью 224 ограничения по току. Транзистор Q1 эффективно создает контакт конденсаторной емкости 145 с конденсатором С1, при этом цепь 224 ограничения по току регулирует скорость зарядки конденсаторной емкости 145 с учетом наличия электрического питания при любом числе оборотов ДВС 24. В реализации цепь 224 ограничения по току включает резистор или индуктор (не показан).
[00169] В другой реализации цепь 200 включает один драйвер 217 и один транзистор Q2 и не включает цепь ограничения по току. Цепь 214 пробуждения периодически подает пусковой сигнал 221 на драйвер 217 транзистора Q2, например, в соответствии с режимом ШИМ, так, чтобы напряжение на отведении 208 постепенно увеличивалось до тех пор, пока не станет фактически равным напряжению конденсаторной емкости 145. В той же реализации сигнал 222 подзарядки также подается к драйверу 216 транзистора Q2. Вместо использования цепи 224 ограничения по току для регулирования скорости зарядки конденсаторной емкости 145, сигнал 222 подзарядки также может подаваться на драйвер 217 в соответствии с режимом ШИМ. Как будет показано в настоящем документе ниже, стратегия управления подачей электрического питания от двигатель-генератора 144 на конденсаторную емкость 145 может, как вариант, использоваться для регулирования скорости зарядки конденсаторной емкости 145.
[00170] В некоторых случаях БУД 164 может интегрировать схему автоматического выключения, которая может прерывать все электрические функции снегохода 10 в случае системного сбоя.
[00171] В таблице I представлена последовательность событий, содержащая процедуру ручного запуска ДВС 24 с последующей командой на процедуру электрического запуска, принятую по прошествии времени ожидания, которое не превышает возможности системы для электрического запуска. В Таблице I отметки «ШИМ» обозначают «широтно-импульсную модуляцию», технология, которая в некоторых случаях может использоваться в первой и второй стратегиях для управления подачей электрического питания между конденсаторной емкостью 145 и двигатель-генератором 144, как показано в настоящем документе ниже.
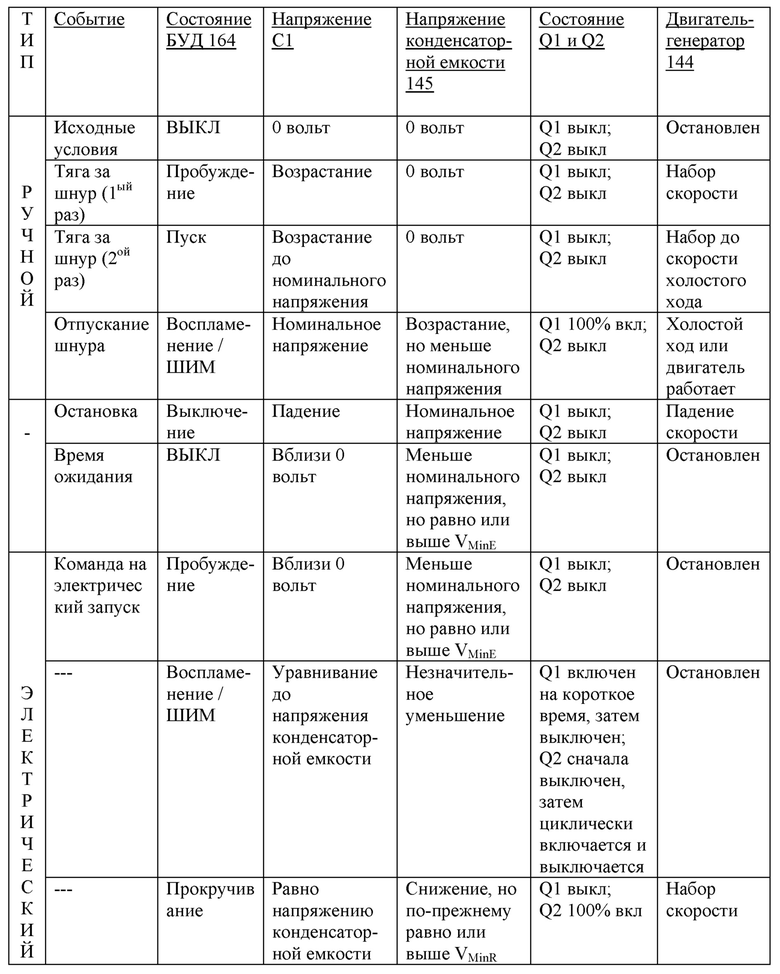
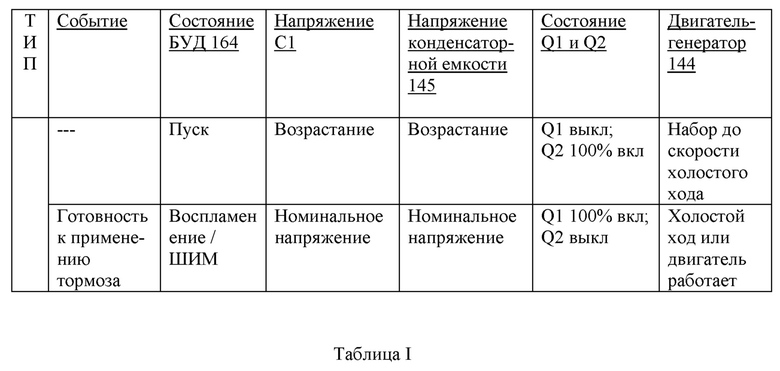
[00172] В Таблице I выражение «холостой ход или двигатель работает» означает, что ДВС 24 запущен и работает самостоятельно, без приложения крутящего момента двигателем-генератором 144 или путем использования стартера 156 обратного хода.
[00173] По меньшей мере, в одной реализации оба пороговых значения VMinE и VMinR напряжения могут быть определены в пределах диапазона рабочего напряжения форсунок 132а и 132b непосредственного впрыска топлива так, что если напряжения конденсаторной емкости 145 не достаточно для впрыскивания топлива форсунками 132а и 132b непосредственного впрыска топлива в цилиндры 106А, 106B, попытка процедуры электрического запуска не предпринимается или прерывается в случае неудачи.
Процедура электрического запуска
[00174] Фигура 9 представляет собой логическую диаграмму способа запуска двигателя по Фигуре 2, в соответствии с реализацией. Последовательность, показанная на Фигуре 9, содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Способ начинается с операции 300, когда ДВС 24 снегохода 10 останавлен. Напряжение конденсаторной емкости 145 измеряется датчиком 167 напряжения на операции 302. В той же операции 302 дисплей 186 может выдать индикацию «автоматического запуска», если напряжение соответствует или превышает пороговое значение VMinE напряжения электрического запуска и если другие условия для процедуры электрического запуска, описанные в настоящем документе ниже, соблюдены. Пользователь активирует переключатель 168 электрического запуска, что обнаруживается детектором 212 команды запуска на операции 304. На операции 322 в ответ на обнаружение запроса электрического запуска БУД 164 управляет драйверами 216 и 217 транзисторов Q1 и Q2, чтобы обеспечить возможность конденсаторной емкости 145 заряжать конденсатор С1 до выравнивания их значений напряжения. БУД 164 и различные датчики, включая, в частности, ДАПКВ 170, включаются от конденсаторной емкости 145 в результате такого уравнивания напряжения. Затем на операции 306 БУД 164 выполняет сравнение между напряжением конденсаторной емкости 145 и пороговым значением VMinE напряжения электрического запуска для определения того, возможно ли инициировать процедуру электрического запуска для ДВС 24. Если определено, что напряжение конденсаторной емкости 145 ниже порогового значения VMinE напряжения электрического запуска, процедура электрического запуска предотвращается. В противном случае на операции 308 выполняется верификация того, что температура двигателя, измеренная датчиком 172 температуры двигателя, соответствует или превышает пороговое значение Th0 температуры двигателя. Процедура электрического запуска предотвращается, если это пороговое значение для температуры двигателя не соблюдено. В противном случае на операции 310 выполняется верификация того, что датчик 182 температуры БУД выдает показание температуры БУД 164, которое соответствует пороговому значению Th1 температуры БУД или превышает его. Процедура электрического запуска предотвращается, если это пороговое значение для температуры БУД не соблюдено. Могут иметь место дополнительные операции, относящиеся к использованию измерений, полученных от других датчиков, включенных в приведенное выше описание Фигуры 6. Эти измерения могут быть выданы на БУД 164 датчиком 174 температуры воздуха, датчиком 176 температуры атмосферы или таймером 180. БУД 164 могут быть выполнены дополнительные тесты на основе этих измерений для определения вероятности того, что процедура электрического запуска будет успешной или нет, или для определения значения крутящего момента, достаточного для приведения коленчатого вала 100 во вращение. Например, процедура электрического запуска может быть сделана зависящей, в БУД 164, от таймера 180, информирующего БУД 164 о том, что период времени с момента остановки ДВС 24 находится ниже заранее определенного значения времени, когда пользователь активирует переключатель 168 электрического запуска на операции 304. На основе периода времени с момента остановки ДВС 24 представляется возможным оценить то, упадет ли напряжение конденсаторной емкости 145 ниже порогового значения VMinE напряжения электрического запуска, зная максимальное напряжение заряда конденсаторной емкости 145 из предыдущей последовательности запуска ДВС 24, и на основе типичной утечки энергии конденсаторной емкости 145.
[00175] Независимо от того, предотвращена ли процедура электрического запуска ввиду того, что напряжения конденсаторной емкости 145 не достаточно (операция 306), ввиду того, что температура двигателя слишком низкая (операция 308), ввиду того, что температура БУД слишком низкая (операция 310), способ переходит к операции 312. На операции 312 БУД 164 активирует дисплей 186 для отображения «Ручной запуск» или некоторого другого сообщения, указывающего пользователю снегохода 10 о необходимости ручного запуска снегохода 10 с помощью стартера 156 обратного хода (т.е. путем тяги за рукоятку 163). В реализациях, где доступна процедура вспомогательного запуска, дисплей 186 может, вместо этого, отобразить «Вспомогательный запуск» или некоторое другое аналогичное сообщение при условии, что текущие условия позволяют использовать данную процедуру. За отображением индикации ручного запуска или индикации вспомогательного запуска на операции 312 может следовать любое решение, принимаемое БУД 164, об отказе в переходе к процедуре электрического запуска. Предполагается, что вместо выдачи сообщения на дисплей 186, БУД 164 может активировать слышимый звуковой сигнал или выдать некоторый другой тип обратной связи пользователю снегохода 10, указывающей на необходимость ручного запуска снегохода 10 с помощью стартера 156 обратного хода. Процедура ручного запуска или процедура вспомогательного запуска может быть инициирована, когда пользователь тянет за шнур 158 стартера 156 обратного хода. Если условия для процедуры вспомогательного запуска соблюдены, данная процедура может быть инициирована так, как описано в настоящем документе ниже. В противном случае, когда условия для процедуры вспомогательного запуска не соблюдены, процедура ручного запуска может быть инициирована на операции 314, когда в ответ на обнаружение функционирования стартера 156 обратного хода пользователем снегохода 10 БУД 164 инициирует процедуру управления двигателем, связанную с использованием стартера 156 обратного хода, для запуска ДВС 24 с помощью стартера 156 обратного хода. Затем на операции 316 БУД 164 определяет, был ли ДВС 24 успешно запущен с помощью стартера 156 обратного хода. Если нет, то операция 314 повторяется. Также предполагается, что если на операции 316 определено, что ДВС 24 не был успешно запущен, то способ может вернуться к операции 312 для повторного отображения сообщения. Если на операции 316 определено, что ДВС 24 был успешно запущен, то способ переходит к операциям 318 и 320, эти последние две (2) операции выполняются одновременно. На операции 318 БУД 164 управляет ДВС 24 в соответствии со стратегией или стратегиями управления, предназначенными для использования сразу после того, как ДВС 24 был запущен. На операции 320 БУД 164 управляет инвертором 146 для активации подачи питания от двигателя-генератора 144 на конденсаторную емкость 145, заряжая конденсаторную емкость 145, с помощью второй стратегии управления при напряжении, которое остается достаточно постоянным для широкого диапазона скоростей вращения коленчатого вала 100. Это может быть достигнуто путем шунтирования БУД 164 одной или более Фаз А, В и С двигателя-генератора 144, если во второй стратегии управления двигатель-генератор 144 вырабатывает напряжение, которое превышает максимальное пороговое значение напряжения. БУД 164 может линейно регулировать напряжение, вырабатываемое двигателем-генератором 144, путем использования последовательного режима регулирования или режима шунтирования. Максимальное пороговое значение напряжения, например, может равняться или несколько превышать номинальное напряжение цепи 200.
[00176] Если на операциях 306, 308 и 310 БУД 164 определяет, что напряжение конденсаторной емкости равно или выше порогового значения VMinE напряжения электрического запуска и что температурные условия и любое другое условие также соблюдено, способ продолжается на операции 324, на которой БУД 164 получает значение абсолютного углового положения коленчатого вала 100 от ДАПКВ 170. Эта операция 324 может продолжаться непрерывным образом во время полной процедуры электрического запуска, так что последующие операции могут быть оптимизированы в соответствии с переменным угловым положением коленчатого вала 100. Предполагается, что операции 322 и 324 могут быть опущены или заменены другими действиями. Например, процедура электрического запуска может выполняться независимо от углового положения коленчатого вала 100 за счет обеспечения конденсаторной емкости 145, батареи или другого источника питания, обладающего достаточной способностью накапливать энергию, для вращения коленчатого вала 100, игнорируя его фактическое угловое положение.
[00177] Процедура электрического запуска переходит к операции 326 и продолжается на операциях 328, 330 и, при необходимости, операции 332. Эти операции начинаются в последовательности, как показано на Фигуре 9, но затем выполняются одновременно до тех пор, пока не будет понятно, что процедура электрического запуска прошла успешно, или до тех пор, пока она должна быть прервана.
[00178] На операции 326 БУД 164 определяет значение крутящего момента, достаточное для приведения коленчатого вала 100 во вращение, и инициирует подачу питания от конденсаторной емкости 145 на двигатель-генератор 144 через инвертор 146 в соответствии с первой стратегией управления, которая адаптирует подачу питания на основе определенного значения крутящего момента. Передача питания приводит коленчатый вал 100 во вращение. В некоторых случаях БУД 164 может определять значение крутящего момента подэтапами, в которых первый подэтап включает подачу электрического питания от конденсаторной емкости 145 на трехфазный двигатель-генератор 144 в соответствии с первым значением крутящего момента для активации медленного поворота коленчатого вала с первой скоростью вращения до тех пор, пока поршень не выйдет из своего положения верхней мертвой точки (ВМТ), на основе информации, выданной ДАПКВ 170, и на основе содержания карт 166 управления, второй подэтап включает подачу электрического питания от конденсаторной емкости 145 на трехфазный двигатель-генератор 144 в соответствии со вторым значением крутящего момента, которое больше первого значения крутящего момента, для активации поворота коленчатого вала со второй скоростью вращения, которая выше первой скорости вращения.
[00179] Пока выполняется операция 326, в частности пока выполняется второй подэтап, если операция 326 включает два подэтапа, способ переходит к операции 328, в которой БУД 164 активирует форсунки 132а, 132b непосредственного впрыска топлива для впрыскивания топлива в камеры 120а, 120b сгорания и активирует свечи 134а, 134b зажигания для воспламенения топлива в камерах 120а, 120b сгорания, тем самым ускоряя вращение коленчатого вала 100. Абсолютное угловое положение коленчатого вала 100 может быть использовано БУД 164 для надлежащего расчета времени для впрыскивания и воспламенения топлива. Поскольку ДАПКВ 170 представляет собой датчик абсолютного положения, он может определять положение коленчатого вала 100, находящегося в неподвижном состоянии, перед запуском ДВС 140. Данная технология обеспечивает точные моменты времени для впрыскивания и воспламенения топлива при очень низкой скорости вращения ДВС 24, такой как когда ДВС 24 запускается. Данная технология уменьшает вероятность неудачи процедуры запуска из-за недостаточного сгорания внутри камер 102А, 120B сгорания, это недостаточное сгорание является результатом неточных моментов времени для впрыскивания или воспламенения топлива, вычисленных из неточного положения коленчатого вала. Данная технология дополнительно способствует ускоренной синхронизации между всеми компонентами ДВС 24, которые полагаются на положение коленчатого вала 100, при сравнении с использованием датчиков положения, которым необходимо вращение коленчатого вала 100 для определения его положения. Также предполагается использование механических активаторов (не показаны), функционально соединенных с коленчатым валом 100, для управления моментами времени для впрыскивания и воспламенения. Кроме того, предполагается, что количество топлива, подлежащего впрыскиванию, и момент воспламенения, применяемые БУД 164 на операции 328, могут быть оценены с помощью любого известного способа, в некоторых случаях в зависимости от одного или нескольких из следующих факторов: температура двигателя, температура воздуха, атмосферное давление и температура выхлопных газов, при этом данные значения выдаются на БУД 164 различными датчиками, показанными на Фигуре 6.
[00180] Пока операции 326 и 328 выполняются, способ переходит к операции 330, на которой БУД 164 сравнивает скорость вращения коленчатого вала 100 с минимальным пороговым значением вращения для определения того, был ли ДВС 24 успешно запущен с помощью процедуры электрического запуска. Если скорость вращения коленчатого вала 100 равна или выше минимального порогового значения вращения, ДВС 24 был успешно запущен, процедура электрического запуска заканчивается и способ переходит к операциям 318 и 320, которые описаны в настоящем документе выше.
[00181] Если на операции 330 БУД 164 определяет, что ДВС 24 еще не был запущен, скорость вращения коленчатого вала 100 ниже минимального порогового значения вращения, способ продолжается на операции 332, на которой БУД 164 вновь выполняет мониторинг напряжения конденсаторной емкости 145. Ожидается, что это напряжение будет в некоторой степени уменьшено, поскольку энергия, ранее хранившаяся в конденсаторной емкости 145, была израсходована во время операций 326 и 328. Однако если оставшееся напряжение конденсаторной емкости 145 равно или выше порогового значения VMinR остаточного напряжения, процедура электрического запуска возвращается к операциям 326 и 328, которые по-прежнему выполняются, и затем к операции 330. Однако если БУД 164 на операции 332 определяет, что напряжение конденсаторной емкости упало ниже порогового значения VMinR остаточного напряжения, способ переходит к операции 334, где БУД 164 прекращает подачу питания от конденсаторной емкости 145 на двигатель-генератор 144 и прекращает операции 326 и 328. После этого способ переходит от операции 334 к операции 312, которая описана в настоящем документе выше, на которой БУД 164 активирует дисплей 186 для отображения индикации ручного запуска или индикации вспомогательного запуска в реализациях, где данная опция доступна, при этом после операции 312 следуют операции 314, 316, 318 и 320 в случае ручного запуска.
[00182] Фигура 10 представляет собой временную диаграмму, показывающую пример вариаций сопротивления крутящего момента двигателя с зависимостью от времени вместе с соответствующими вариациями скорости вращения. График 400 показывает вариацию сопротивления крутящего момента ДВС 24 в Ньютон-метрах (Нм) с зависимостью от времени в секундах. График 400 был получен из модели Simulink™. Как показано на графике 400, скорость вращения на начальной фазе составляет приблизительно 100 оборотов в минуту (об/мин). Сопротивление крутящего момента может варьироваться в зависимости от скорости вращения коленчатого вала 100. График 402 показывает соответствующую вариацию скорости вращения коленчатого вала 100 в одной и той же временной шкале. При моделировании двухцилиндровый ДВС 24 запускают, когда поршень сперва достигает положения вблизи ВМТ. По прошествии менее 0,1 секунды сопротивление крутящего момента становится отрицательным, поскольку поршень прошел мимо своей ВМТ. Сжатие, присутствующее в камере сгорания, толкает поршень и ускоряет вращение коленчатого вала 100. Приблизительно на 0,12 секунды БУД 164 управляет крутящим моментом, применяемым к коленчатому валу 100 двигателем-генератором 144, ускоряя вращение коленчатого вала 100. Скорость вращения коленчатого вала 100 достигает самого высокого положения приблизительно на 0,17 секунды, поскольку поршень теперь сжимает газы, которые могут оставаться в камере сгорания. Скорость вращения снижается по мере приближения поршня к его ВМТ. ВМТ достигается приблизительно на 0,32 секунды. Происходит успешное воспламенение, после чего скорость вращения коленчатого вала 100 быстро увеличивается, тогда как сопротивление крутящего момента на двигателе-генераторе 144 становится в целом отрицательным, следуя форме зубчатой волны, поскольку поршень циклически двигается вверх и вниз в своем цилиндре.
Процедура вспомогательного запуска
[00183] Фигура 11 представляет собой логическую диаграмму способа запуска двигателя по Фигуре 2, в соответствии с другой реализацией. Последовательность, показанная на Фигуре 11, содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Способ начинается с операции 600, когда ДВС 24 снегохода 10 останавлен. Напряжение конденсаторной емкости 145 измеряется датчиком 167 напряжения на операции 602. В той же операции 602 дисплей 186 может выдать индикацию «вспомогательного запуска», если напряжение соответствует или превышает пороговое значение VMinA напряжения вспомогательного запуска и если другие условия для процедуры вспомогательного запуска, описанные в настоящем документе ниже, соблюдены. На операции 604 пользователь инициирует вращение коленчатого вала 100 путем тяги за шнур 158 стартера 156 обратного хода, эту операцию опознает ДПКВ 171, который в свою очередь посылает сигнал включения на детектор 212 команды запуска для активации БУД 164. В одном варианте ДАПКВ 170 включается при начале процедуры запуска БУД 170, который в свою очередь был активизирован ДПКВ 171. В другом варианте ДАПКВ 170 постоянно соединен с конденсаторной емкостью 145, что обеспечивает возможность определения абсолютного углового положения коленчатого вала 100, когда конденсаторная емкость 145 держит по меньшей мере минимальный заряд. Обнаружение начального вращения коленчатого вала 100 может зависеть от обнаружения ДАПКВ 170 того, что скорость вращения коленчатого вала 100 соответствует минимальному пороговому значению вращения или превышает его. На операции 606 БУД 164 управляет драйверами 216 и 217 транзисторов Q1 и Q2, чтобы обеспечить возможность конденсаторной емкости 145 заряжать конденсатор С1 до выравнивания их значений напряжения. БУД 164 и различные датчики, включая, в частности, ДАПКВ 170, включаются от конденсаторной емкости 145 в результате такого уравнивания напряжения. На операции 608 БУД 164 выполняет сравнение между напряжением конденсаторной емкости 145 и пороговым значением VMinA напряжения вспомогательного запуска для определения того, возможно ли инициировать процедуру вспомогательного запуска для ДВС 24. Если определено, что напряжение конденсаторной емкости 145 ниже порогового значения VMinA напряжения вспомогательного запуска, процедура вспомогательного запуска предотвращается. В противном случае на операции 610 выполняется верификация того, что температура двигателя, измеренная датчиком 172 температуры двигателя, соответствует пороговому значению Th0 температуры двигателя или превышает его. Процедура вспомогательного запуска предотвращается, если это пороговое значение для температуры двигателя не соблюдено. В противном случае на операции 612 выполняется верификация того, что датчик 182 температуры БУД выдает показание температуры БУД 164, которое соответствует пороговому значению Th1 температуры БУД или превышает его. Процедура вспомогательного запуска предотвращается, если это пороговое значение для температуры БУД не соблюдено. Могут иметь место дополнительные операции, относящиеся к использованию измерений, полученных от других датчиков, включенных в приведенное выше описание Фигуры 6. Эти измерения могут быть выданы на БУД 164 датчиком 174 температуры воздуха, датчиком 176 температуры атмосферы или таймером 180. БУД 164 могут быть выполнены дополнительные тесты на основе этих измерений для определения вероятности того, что процедура вспомогательного запуска будет успешной или нет. Например, процедура вспомогательного запуска может быть выполнена зависящей, в БУД 164, от таймера 180, информирующего БУД 164 о том, что период времени с момента остановки ДВС 24 ниже заранее определенного значения времени, когда пользователь тянет за шнур 158 стартера 156 обратного хода, на операции 604. На основе периода времени с момента остановки ДВС 24 представляется возможным оценить то, упадет ли напряжение конденсаторной емкости 145 ниже порогового значения VMinA напряжения вспомогательного запуска, зная максимальное напряжение заряда конденсаторной емкости 145 из предыдущей последовательности запуска ДВС 24, и на основе типичной утечки энергии конденсаторной емкости 145.
[00184] За отображением индикации ручного запуска на операции 614 может следовать любое решение, принимаемое БУД 164, об отказе в переходе к процедуре вспомогательного запуска. Независимо от того, предотвращена ли процедура вспомогательного запуска ввиду того, что напряжения конденсаторной емкости 145 не достаточно (операция 608), ввиду того, что температура двигателя слишком низкая (операция 610), ввиду того, что температура БУД слишком низкая (операция 612), способ переходит к операции 614. На операции 614 дисплей 186 может отобразить «Ручной запуск». После операции 614 пользователь может продолжить тянуть за шнур 158 стартера 156 обратного хода на операции 616. Операция 616 может продолжаться до тех пор, пока на операции 618 не будет обнаружено, что ДВС 24 был надлежащим образом запущен. Управление ДВС 24 и подачей электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 происходит на 620 и 622, которые являются такими же или эквивалентными операциям 318 и 320 по Фигуре 9, включающим, в реализации, управление ДВС 24 с помощью описанных выше стратегий управления.
[00185] Если на операциях 608, 610 и 612 БУД 164 определяет, что напряжение конденсаторной емкости равно или выше порогового значения VMinA напряжения электрического запуска и что температурные условия и любое дополнительное условие также соблюдено, способ продолжается на операции 624, на которой ДАПКВ 170 определяет текущее абсолютное угловое положение коленчатого вала 100.
[00186] Процедура вспомогательного запуска переходит к операции 626 и продолжается на операциях 628, 630 и, при необходимости, операции 632. Эти операции начинаются в последовательности, как показано на Фигуре 11, но затем выполняются одновременно до тех пор, пока не будет понятно, что процедура вспомогательного запуска прошла успешно, или до тех пор, пока она должна быть прервана.
[00187] На операции 626 БУД 164 инициирует подачу питания от конденсаторной емкости 145 на двигатель-генератор 144 через инвертор 146. Эта передача питания ускоряет вращение коленчатого вала 100 и уменьшает количество усилий, которые пользователь должен приложить для тяги за шнур 158 стартера 156 обратного хода. В некоторых случаях БУД 164 может определять значение крутящего момента таким же способом, как описано в представленном выше описании операции 326 (Фигура 9).
[00188] Пока выполняется операция 626, способ переходит к операции 628, в которой БУД 164 активирует форсунки 132а, 132b непосредственного впрыска топлива для впрыскивания топлива в камеры 120а, 120b сгорания и активирует свечи 134а, 134b зажигания для воспламенения топлива в камерах 120а, 120b сгорания, тем самым ускоряя вращение коленчатого вала 100. Угловое положение коленчатого вала 100 используется БУД 164 для надлежащего расчета времени для впрыскивания и воспламенения топлива. Предполагается, что количество топлива, подлежащего впрыскиванию, и момент воспламенения, применяемый БУД 164 на операции 628, могут зависеть от одного или нескольких из следующих факторов: температура двигателя, температура воздуха, атмосферное давление и температура выхлопных газов, при этом данные значения выдаются на БУД 164 различными датчиками, показанными на Фигуре 6.
[00189] Пока 626 и 628 выполняются, способ переходит к операции 630, на которой БУД 164 сравнивает скорость вращения коленчатого вала 100 с минимальным пороговым значением вращения для определения того, был ли ДВС 24 успешно запущен с помощью процедуры вспомогательного запуска. Если скорость вращения коленчатого вала 100 равна или выше минимального порогового значения вращения, ДВС 24 был успешно запущен, процедура вспомогательного запуска заканчивается и способ переходит к 620 и 622, которые описаны в настоящем документе выше.
[00190] Если на операции 630 БУД 164 определяет, что ДВС 24 еще не был запущен, скорость вращения коленчатого вала 100 ниже минимального порогового значения вращения, способ продолжается на операции 632, на которой БУД 164 вновь выполняет мониторинг напряжения конденсаторной емкости 145. Ожидается, что это напряжение будет в некоторой степени уменьшено, поскольку энергия, ранее хранившаяся в конденсаторной емкости 145, была израсходована во время 626 и 628. Однако если оставшееся напряжение конденсаторной емкости 145 равно или выше порогового значения остаточного напряжения, процедура вспомогательного запуска возвращается к операциям 626 и 628, которые по-прежнему выполняются, и затем к операции 630. В одном варианте пороговое значение остаточного напряжения, применимое к процедуре вспомогательного запуска, может быть таким же значением VMinR, как и в случае процедуры электрического запуска. В другом варианте может быть использовано другое пороговое значение остаточного напряжения при условии, что количество питания, поданного на двигатель-генератор 144 конденсаторной емкостью 145, дополняет усилие пользователя, тянущего за шнур 158 стартера 156 обратного хода. Однако если БУД 164 на операции 632 определяет, что напряжение конденсаторной емкости упало ниже порогового значения VMinR остаточного напряжения, способ переходит к операции 634, где БУД 164 прекращает подачу питания от конденсаторной емкости 145 на двигатель-генератор 144 и прекращает операции 626 и 628. После этого способ переходит от операции 634 к операции 614, которая описана в настоящем документе выше, на которой БУД 164 активирует дисплей 186 для отображения индикации ручного запуска, при этом после операции 614 следуют операции 616, 618, 620 и 622.
[00191] В реализации снегоход 10 может быть выполнен с возможностью поддержки любой одной из процедур ручного, электрического и вспомогательного запуска. В такой реализации операция 312 (Фигура 9) может выдавать индикацию ручного запуска или вспомогательного запуска в зависимости от напряжения конденсаторной емкости 145. Если напряжение конденсаторной емкости ниже порогового значения VMinE напряжения электрического запуска, при этом соответствуя или превышая пороговое значение VMinA напряжения вспомогательного запуска, операция 312 по Фигуре 9 может выдавать индикацию вспомогательного запуска и после нее может следовать операция 604 по Фигуре 11, если пользователь тянет за шнур 158 стартера 156 обратного хода. Также в данной реализации после запуска ДВС 24 с помощью процедуры вспомогательного запуска ДВС 24 может быть остановлен, а дисплей 186 может выдать индикацию о доступной процедуре запуска в зависимости от текущих условий, отправленных на БУД 164 различными датчиками.
Реализации стратегий управления
[00192] Как разъяснено в настоящем документе выше, БУД 164 управляет инвертором 146 через переключатель 184 стратегий. С этой целью БУД 164 генерирует управляющие импульсы, которые применяются к переключателю 184 стратегий. Эти управляющие импульсы генерируются по отдельности в двух (2) стратегиях управления. По меньшей мере, в одной реализации эффект этих управляющих импульсов зависит от внутренней структуры инвертора 144. Фигура 12 представляет собой диаграмму цепи, показывающую соединения инвертора 146, конденсаторной емкости 145 и двигателя-генератора 144 по Фигуре 6. Как показано на Фигуре 12, инвертор 146 имеет три фазы, каждая фаза электрически соединена с соответствующей фазой трехфазного двигателя-генератора 144. Более подробно, инвертор 146 образован тремя (3) ветвями переключения, каждая ветвь переключения содержит пару МОП-транзисторов T1, Т2, Т3, Т4, Т5 и Т6, совпадающих с соответствующими диодами D2, Dl, D3, D2, D6 и D5 обратной цепи. Например, первая ветвь, образующая первую фазу, содержит верхний транзистор Т1, совпадающий с диодом D2 обратной цепи, и нижний транзистор Т2, совпадающий с диодом D1 обратной цепи. Вторая ветвь, образующая вторую фазу, содержит транзисторы Т3 и Т4, совпадающие с диодами D4 и D3 соответственно, тогда как третья ветвь, образующая третью фазу, содержит транзисторы Т5 и Т6, совпадающие с диодами D6 и D5 соответственно. Также, в качестве замены МОП-транзисторам, предполагаются биполярные транзисторы, например, БТИЗ, или любые другие силовые электронные переключатели. Каждый транзистор Т1-Т6 имеет соответствующий затвор G1-G6, через который может быть применен сигнал или управляющий импульс под управлением БУД 164 через переключатель 184 стратегий прямо или через драйвер затвора (не показан) для включения (замкнутая цепь) или выключения (незамкнутая цепь) соответствующих транзисторов Т1-Т6. Диоды D1-D6 обратной цепи используются для уменьшения переходного перенапряжения, которое происходит после включения и выключения транзисторов Т1-Т6.
[00193] Например, когда двигатель-генератор 144 находится в рабочем режиме двигателя, используемого в качестве стартера для ДВС 24, первый управляющий импульс применяется к затвору G1 для установления замкнутой цепи для транзистора Т1. Ток протекает от плюсовой пластины конденсаторной емкости 145 через транзистор Т1 и достигает фазы двигателя-генератора 144, определенной между входом А и нейтральным соединением между фазами двигателя-генератора 144, далее - «Фаза А». После этого, первый управляющий импульс удаляется из затвора G1, так что транзистор Т1 становится незамкнутой цепью. В то же время, второй управляющий импульс применяется к затвору G2, активируя включение транзистора Т2. Теперь ток протекает в противоположном направлении в Фазе А двигателя-генератора 144, возвращаясь к отрицательной пластине конденсаторной емкости 145 через транзистор Т2. В результате этой последовательности включения и выключения транзисторов Т1 и Т2, переменный ток протекает в Фазе А двигателя-генератора 144.
[00194] Ток, протекающий в Фазу А двигателя-генератора 144, должен выйти через одну или обе других фазы двигателя-генератора 144. «Фаза В» определена между вводом В и нейтральным соединением. «Фаза С» определена между вводом С и нейтральным соединением. Ток протекает от Фазы А через Фазу В или Фазу С, или обе Фазы В и С, в зависимости от того, включен ли один или оба транзистора Т4 или Т6 управляющими импульсами, примененными к их соответствующим затворам G4 или G6, когда транзистор Т1 также включен. Ток, выходящий из двигателя-генератора 144 через одну или обе Фазы В и/или С, возвращается на отрицательную пластину конденсаторной емкости 145 через один или оба транзистора Т4 и/или Т6. Диоды D1-D6 обратной цепи содействуют поддержанию фазового тока индукции во время периодов обратной цепи.
[00195] Для функционирования двигателя-генератора 144 в качестве традиционного трехфазного двигателя ток может протекать одновременно во всех трех (3) Фазах А, В и С, а управление выдержкой временем различных транзисторов Т1-Т6 разделено 120 градусами. Однако предполагаются другие рабочие режимы двигателя-генератора 144, в которых ток протекает не одновременно во всех трех (3) Фазах А, В и С.
[00196] Примеры параметров, которые могут быть рассмотрены путем программирования БУД 164 на управление подачей электрического питания в обеих стратегиях, включают, без ограничения, ток и напряжение каждой фазы, ток и напряжение в каждой из Фаз А, В и С двигателя-генератора 144, угловое положение и скорость вращения коленчатого вала 100. БУД 164 использует эти значения для определения электромагнитного крутящего момента двигателя-генератора 144, данный крутящий момент имеет положительное значение, когда двигатель-генератор 144 используется во время процедуры электрического запуска или процедуры вспомогательного запуска, и отрицательное значение при использовании в рабочем режиме генератора.
[00197] В первой стратегии управления используется технология, именуемая векторным управлением. Применимые примеры технологии векторного управления включает полеориентированное управление (ПОУ), прямое управление моментом (ПУМ), прямое самоуправление (ПСУ), пространственно-векторную модуляцию (ПВМ) и тому подобное. Использование любой из применимых технологий векторного управления предусмотрено и находится в рамках настоящего раскрытия. Первая стратегия управления используется в основном для управления подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 для активации или содействия вращению коленчатого вала 100 при процедуре электрического запуска или при процедуре вспомогательного запуска ДВС 24. В одной реализации БУД 164 определяет запрос крутящего момента, достаточного для приведения коленчатого вала 100 во вращение. В другой реализации БУД 164 определяет запрос скорости, применяемой к коленчатому валу 100, достаточной для активации воспламенения и запуска ДВС 24. Это определение запроса скорости или запроса крутящего момента может быть выполнено БУД 164, применяя заранее определенное значение или шаблон запроса скорости или крутящего момента на основе содержания карт 166 управления. БУД 164 может увеличивать запрос крутящего момента, если применение крутящего момента не приводит к вращению коленчатого вала 100. БУД 164 может увеличивать запрос скорости, если вращения коленчатого вала 100 недостаточно для обеспечения возможности воспламенения и запуска ДВС 24. В качестве альтернативы, БУД 164 может вычислять запрос скорости или крутящего момента на основе комбинации параметров, включая, в неограничивающем примере, математическое представление внутренних компонентов ДВС 24, и на основе абсолютного углового положения коленчатого вала 100. БУД 164 управляет подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 на основе определенного запроса скорости или запроса крутящего момента посредством генерирования управляющих импульсов, применяемых к транзисторам, выбранным из Т1-Т6. Используя векторное управление, БУД 164 вычисляет количество, моменты времени и ширину различных управляющих импульсов, так что количество электрического питания, протекающего от конденсаторной емкости 145 через инвертор 146 и на двигатель-генератор 144, удовлетворяет определенному запросу скорости или крутящего момента. Такой способ управления транзисторами Т1-Т6 путем применения тактовых импульсов к их затворам G1-G6, каждый из импульсов имеет вычисленную ширину, известен как широтно-импульсная модуляция (ШИМ).
[00198] Фигура 13 представляет собой блок-диаграмму типичной реализации привода векторного управления. Привод 500 векторного управления по Фигуре 13 может быть реализован, по меньшей мере, частично в БУД 164. Входные данные на привод векторного управления содержат заданную точку 504 для требуемой скорости (запрос скорости), которая определена, как достаточная для запуска ДВС 24. Эта заданная точка 504 применяется для контура 506 управления низкой скоростью. Другие входные данные привода 500 векторного управления содержат измерения 508а, 508b и 508с тока для трех фаз двигателя-генератора 144 и измерение 510 напряжения, полученные от инвертора 146 и/или от двигателя-генератора 144. Эти измерения тока и напряжения применяются к аналогово-цифровому преобразователю (АЦП) 512. Измерения 514 углового положения коленчатого вала (сигналы uA, uS кодера), полученные от ДАПКВ 170, применяют к квадратурному таймеру 516. Поскольку двигатель-генератор 144 смонтирован коаксиально по отношению к коленчатому валу 100, сигналы кодера uA, uS 514 также представляют фактическое угловое положение ротора 150 двигателя генератора 144. Привод 500 векторного управления использует эту информацию для расчета запроса крутящего момента, как разъяснено в следующих пунктах. Квадратурный таймер 516 вычисляет текущее положение коленчатого вала 100. АЦП 512 вычисляет оцифрованное значение 518 напряжения и оцифрованные значения 520а, 520b и 520с тока для трех фаз двигателя-генератора 144. Эти оцифрованные значения и текущее положение 522 коленчатого вала 100, вычисленное квадратурным таймером 516, выдаются на быстродействующий контур 524 управления током. Текущее положение 522 коленчатого вала 100 преобразуется в текущую (измеренную) скорость 526 вычислителем 528 скорости в контуре 506 управления низкой скоростью. Разницу 528 между измеренной скоростью 526 и требуемой заданной точкой 504 скорости применяют к первому пропорционально-интегральному (ПИ) контроллеру 530, который, в свою очередь, выдает изображение 532 тока в запросе крутящего момента, который применен в качестве заданной точки (Isq_req) к быстродействующему контуру 524 управления током.
[00199] Как разъяснено в настоящем документе выше, в некоторых вариантах может быть желательно управлять двигателем-генератором 144 так, чтобы он подавал электрическое питание на конденсаторную емкость 145 в соответствии с первой стратегией управления, по меньшей мере, при низких скоростях вращения коленчатого вала 100. С этой целью необязательный модуль 534 для ослабления поля, имеющий внутреннюю карту, ослабляет значения на его выходе на основе измеренной скорости 526 коленчатого вала 100 для выдачи изображения 536 тока магнитного поля двигателя-генератора 144 в качестве дополнительной заданной точки (Isd_req), применяемой к быстродействующему контуру 524 управления током.
[00200] В быстродействующем контуре 524 управления током преобразование 538 Кларка преобразует измерения 520а, 520b и 520с трехфазного тока в двухфазную модель 540. Преобразование 542 Парка, в которое поданы значения 523 синуса и косинуса текущего положения 522 коленчатого вала 100, вычисленные синусно-косинусным преобразователем 525, дополнительно преобразует эту модель 540 для выдачи стационарного изображения 544 тока текущего крутящего момента двигателя-генератора 144 (Isq) и стационарного изображения 546 тока текущего магнитного поля двигателя-генератора (Isd). Выводы 544 и 546 этой модели, соответственно, сравниваются с заданной точкой 532 Isq_req и с заданной точкой 536 Isq_req (если используется), и разницы между ними, соответственно, подаются на второй и третий ПИ-контроллеры 548, 550. Обратное преобразование 552 Парка применяется к стационарным запросам Uq 554 и Ud 556 напряжения, выдаваемым вторым и третьим ПИ-контроллерами 548, 550, обратное преобразование 552 Парка использует значения 523 синуса и косинуса текущего положения 522 коленчатого вала 100 для выдачи выходных данных 558, 560 обратного преобразования 552 Парка, которые применяют к преобразованию 562 пространственно-векторной модуляции в широтно-импульсную модуляцию (ПВ-ШИМ). В свою очередь, преобразование 562 ПВ-ШИМ выдает трехфазное управление 564 на модуль 566 ШИМ, который генерирует импульсы 502, которые БУД 164 выдает для применения к затворам G1-G6 инвертора 146.
[00201] БУД 164 может управлять подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 на основе заранее определенного значения крутящего момента, или запроса крутящего момента, достаточного для приведения коленчатого вала 100 во вращение для запуска ДВС 24. Однако с учетом того, что величина крутящего момента, требуемого для вращения коленчатого вала 100, перед воспламенением в цилиндре (или цилиндрах) варьируется на основе углового положения коленчатого вала 100 относительно положения верхней мертвой точки (ВМТ) каждого поршня, также предполагается вычисление переменного крутящего момента. Абсолютное угловое положение коленчатого вала 100 выдает ДАПКВ 170. В варианте, включенном в представленное выше описание операции 326 (Фигура 9), БУД 164 вычисляет или иным образом определяет запрос крутящего момента на основе углового положения коленчатого вала 100, выданного ДАПКВ 170, значения запроса крутящего момента обновляются в различных точках вращения коленчатого вала 100. В результате, запрос крутящего момента может быть оптимизирован, так что его достаточно для вращения коленчатого вала 100, когда он достигает различных угловых положений, при этом используя настолько мало энергии, хранящейся в конденсаторной емкости 145, насколько это возможно. В конкретном варианте БУД 164 управляет величиной крутящего момента, применяемого на двигателе-генераторе 144, так что он поворачивается с очень низкой скоростью до тех пор, пока заданный поршень 116А, 116B не пройдет свою ВМТ в первый раз. Во время этого краткого периода времени газ медленно выходит из камеры 120А, 120B сгорания, в которой расположен этот заданный поршень 116А, 116B. На данной операции конденсаторная емкость 145 выдает очень малое количество энергии. Как только поршень 116А, 116B вышел из своей ВМТ, коленчатый вал 100 получил, по меньшей мере, некоторый толчок. Затем БУД 164 увеличивает запрос крутящего момента на двигатель-генератор 144, так что коленчатый вал 100 вращается со скоростью, достаточной для обеспечения возможности впрыскивания топлива в камеру 120А, 120B сгорания по мере передвижения поршня 116А, 116B к своему положению ВМТ, воспламенение происходит в камере 120А, 120B сгорания как только поршень переместился из своей ВМТ. Это увеличение запроса крутящего момента может быть линейным до тех пор, пока не будет достигнута заранее определенная заданная точка крутящего момента, так что скорость вращения коленчатого вала 100 увеличивается постепенно.
[00202] После запуска ДВС 24, независимо от того, был ли ДВС 24 запущен с помощью процедуры ручного запуска, процедуры вспомогательного запуска или процедуры электрического запуска, коленчатый вал 100 приводит в действие двигатель-генератор 144 при переменной скорости вращения, которая большую часть времени существенно превышает скорость вращения, используемую в ходе любой из процедур запуска. Сразу после запуска ДВС 24 функционирование двигателя-генератора 144 переключается на режим функционирования в качестве генератора. В реализации БУД 164 может определять скорость вращения коленчатого вала 100 на основе последовательных показаний, выданных ДПКВ 171 или ДАПКВ 170, и активировать двигатель-генератор 144 для начала подачи электрического питания на конденсаторную емкость 145, когда скорость вращения коленчатого вала соответствует минимальному пороговому значению вращения или превышает его. В этой точке или вскоре после нее БУД 164 начинает управление переключателем 184 стратегий и инвертором 146 с помощью второй стратегии управления. В некоторых случаях первая стратегия управления может быть использована в режиме функционирования в качестве генератора до тех пор, пока измерение напряжения, выданное датчиком 167 напряжения, не будет соответствовать пороговому значению вырабатываемого напряжения или превышать его. Пороговое значение вырабатываемого напряжения может быть установлено, например, несколько ниже номинального напряжения конденсаторной емкости 145.
[00203] Вторая стратегия управления использует технологию «шунтирования». Вывод двигателя-генератора 144, являющегося в этот момент генератором, используется для зарядки конденсаторной емкости 145, для подачи электрического питания на форсунки 132а, 132b непосредственного впрыска топлива, для зажигания свечей 134а, 134b зажигания и, в целом, для подачи электрического питания на электрические вспомогательные приспособления снегохода 10. С этой целью БУД 164 изменяет положение переключателя 184 стратегий, так что электрическое питание теперь протекает от двигателя-генератора 144 на конденсаторную емкость 145 по-прежнему через инвертор 146. БУД 164 выполняет мониторинг напряжения конденсаторной емкости 145 посредством измерений, полученных от датчика 167 напряжения. На основе этих измерений напряжения БУД 164 генерирует управляющие импульсы, которые применяются посредством переключателя 184 стратегий к затворам G1-G6 транзисторов Т1-Т6 в инверторе 146. ШИМ по-прежнему применяется БУД 164 к затворам G1-G6, но теперь в соответствии со второй стратегией управления.
[00204] Если выходное напряжение двигателя-генератора 144 выше его номинального значения или выше его номинального значения плюс заранее определенный коэффициент погрешности, БУД 164 управляет инвертором 146 для снижения напряжения, при котором электрическое питание подается от двигателя-генератора 144 на конденсаторную емкость 145. С этой целью в одном рабочем режиме, именуемом режимом регулирования с рассеянием напряжения, БУД 164 может генерировать управляющие импульсы, применяемые к различным затворам G2, G4 и G6, для эффективного обхода или «шунтирования» одной или более фаз двигателя-генератора 144, в то же время не применяя управляющий импульс к затворам G1, G3 и G5 для того, чтобы оставить транзисторы Т1, Т3 и Т5 непроводящими (незамкнутая цепь). Например, применение импульсов к затворам G2 и G6 активирует включение транзисторов Т2 и Т6, и они становятся проводящими. В результате, между Фазами А и С двигателя-генератора 144 вместе с транзисторами Т2 и Т6 образуется замкнутый контур. При этом условии от двух (2) фаз двигателя-генератора 144 на конденсаторную емкость 145 не подается электрическое питание. Длительность (ширина) и моменты времени импульсов, применяемых к затворам G2 и G6, влияет на длительность времени, когда Фазы А и С отводятся, влияя, в свою очередь, на напряжение зарядки, применяемое к конденсаторной емкости 145. ШИМ может быть применена к любой паре нижних транзисторов Т2, Т4 и Т6, так что они могут быть замкнуты в желаемое время для шунтирования пары фаз двигателя-генератора 144. С течением времени БУД 164 фактически может модифицировать определение того, какая пара транзисторов составляет часть шунтирования для того, чтобы предотвратить их перегрев, обусловленный потерями проводимости в инверторе 146. С этой целью регулирование напряжения в режиме шунтирования включает последовательную активацию транзисторов Т2, Т4 и Т6. В результате, подача электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 может выполняться при желаемом напряжении в пределах широкого диапазона скорости вращения коленчатого вала 100. Также предполагается последовательный режим регулирования напряжения, в котором диоды D1, D3 и D5 обратной цепи необязательно могут быть заменены дополнительными транзисторами (не показаны), установленными обратно параллельно транзисторам Т1, Т3 и Т5, эти дополнительные транзисторы включаются и выключаются в зависимости от необходимости обеспечения возможности перезарядки конденсаторной емкости 145 током от двигателя-генератора 144, не превышая значение номинального напряжения.
[00205] В конкретной реализации регулирование напряжения в режиме шунтирования может использовать измерения, выданные ДПКВ 171 или ДАПКВ 170. В данной реализации ДПКВ 171 или ДАПКВ 170 обеспечивает БУД 164 возможность определения механического положения коленчатого вала 100. БУД 164 вычисляет эквивалентный электрический угол путем умножения механического положения коленчатого вала 100 на известное количество полюсных пар двигателя-генератора 144. Если выходное напряжение двигателя-генератора 144 выше заранее определенного значения, начиная от возрастания напряжения в любой одной из фаз А, В или С, все три (3) фазы последовательно отводятся синхронно с функционированием двигателя-генератора 144. Данная последовательность шунтирования может быть повторена, когда выходное напряжение двигателя-генератора 144 вновь возрастает выше заранее определенного значения.
[00206] Если напряжение конденсаторной емкости 145 равняется или ниже его номинального значения, БУД 164 управляет инвертором 146 для подачи доступного электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 без шунтирования любой из Фаз А, В или С. При этом условии, которое может, например, иметь место в случае краткой длительности после запуска ДВС 24, управление подачей электрического питания может рассматриваться в качестве нейтрального режима управления, отличающегося от первой и второй стратегий управления. В нейтральном режиме управления инвертор 146 действует в качестве трехфазного двухполупериодного выпрямителя диодного моста, не обеспечивающего какое-либо регулирование напряжения или тока.
[00207] Фигура 14 представляет собой блок-диаграмму электрической системы, в соответствии с реализацией настоящей технологии. Цепь 700 содержит варианты элементов, включенных в представленное выше описание различных чертежей, эти элементы сгруппированы в подсистемы. Двигатель-генератор 144 является одной такой подсистемой. Другая подсистема представлена в виде модуля 702 управления, который, в реализации, содержит один физический модуль, содержащий процессор 703, запрограммированный на выполнение функций БУД 164, инвертор 146, датчик 182 температуры БУД и дополнительно содержит преобразователь 704 постоянного тока. Как показано, БУД 164 содержит соединения для переключателя 168 электрического запуска, для измерений, выдаваемых различными датчиками 167, 170, 171, 172, 174, 176 и 182, и соединения с затворами G1-G6 инвертора 146. В изображенном примере датчик 167 напряжения реализован в виде датчика 167 DC напряжения постоянного тока, который измеряет напряжение конденсаторной емкости 145, и в виде датчика 167 AC напряжения переменного тока, который измеряет напряжение на одной фазе двигателя-генератора 144, эти два компонента датчика 167 напряжения интегрированы в БУД 164. Также предполагается использование внешних датчиков напряжения, функционально соединенных с БУД 164. Третья подсистема 706 содержит конденсаторную емкость 145, а также зарядную цепь 705 и разрядную цепь 707, которые соответственно используют драйверы 216 и 217 и транзисторы Q1 и Q2 по Фигуре 8 для управления зарядкой и разрядкой конденсаторной емкости 145.
[00208] Цепь 700 функционирует при номинальном напряжении системы, которое, как правило, представляет собой напряжение конденсаторной емкости 145 при полном заряде. Четвертая подсистема 708 содержит компоненты снегохода 10, которые функционируют при напряжении системы. Эти компоненты могут включать форсунки 132а, 132b непосредственного впрыска топлива, электрический масляный насос 710, катушки 712 зажигания для свечей 134а, 134b зажигания и топливный насос 714. Пятая подсистема 716 содержит вспомогательные приспособления снегохода 10, которые функционируют при вспомогательном напряжении. Эти вспомогательные приспособления могут включать многопортовую топливную форсунку (МПТФ) 718, фару 720, приборную панель 722, содержащую дисплей 186, ручки 724 руля с подогревом, установленные на руле 36, и выпускной клапан 726. Преобразователь 704 постоянного тока преобразует напряжение системы во вспомогательное напряжение и, таким образом, выдает электрическое питание на вспомогательные приспособления.
[00209] В реализации цепь 700 обычно функционирует при напряжении системы, составляющем 55 вольт, а некоторые вспомогательные приспособления снегохода обычно функционируют при вспомогательном напряжении, составляющем 12 вольт. Различные датчики 167, 170, 171, 172, 174, 176 и 182 могут работать при напряжении системы или при вспомогательном напряжении или при любом другом напряжении, если в цепь 700 включен дополнительный преобразователь напряжения (не показан). В данной реализации преобразователь 704 постоянного тока представляет собой преобразователь 55В-12В. Эти значения напряжения системы и вспомогательного напряжения являются номинальными для данной реализации и могут варьироваться в соответствии с текущими условиями работы снегохода 10.
[00210] Фигура 15 представляет собой временную диаграмму, показывающую пример последовательности для изменения стратегии управления для подачи электрического питания между конденсаторной емкостью 145 и двигателем-генератором 144 вместе с соответствующими вариациями скорости вращения двигателя. График 410 показывает вариацию стратегий управления для подачи электрического питания, применяемых БУД 164, с зависимостью от времени в секундах. На данном графике 410 «Стратегия 1» указывает на применение первой стратегии управления, в частности, использующей векторное управление, «Стратегия 2» указывает на применение второй стратегии управления, которая использует шунтирование фаз двигателя-генератора 144 для управления напряжением, применяемым для зарядки конденсаторной емкости 145, а «Нейтральная» указывает на применение нейтрального режима управления. В нейтральном режиме управления напряжение, вырабатываемое двигателем-генератором 144, просто может преобразовано в постоянный ток и применено для зарядки конденсаторной емкости 145, при условии, что пиковое напряжение обратной электродвижущей силы двигателя-генератора 144 выше номинального напряжения цепи 200, это условие обычно соблюдается, когда ДВС 24 достигает достаточной скорости вращения. График 412 показывает соответствующую вариацию скорости вращения коленчатого вала 100 в одной и той же временной шкале. В первой половине секунды функционирования после команды пользователя для процедуры электрического запуска ДВС 24 подача электрического питания между конденсаторной емкостью 145 и двигателем-генератором 144 не происходит. Этот период используется для уравновешивания напряжений конденсаторной емкости 145 и конденсатора С1. Фактическая длительность этого периода может значительным образом варьироваться в зависимости от значения конденсатора С1. Период в диапазоне от 0,5 до приблизительно 1,1 секунды приблизительно соответствует периоду между 0 и 0,4 секунды, охваченному на графиках 400 и 402. БУД 164 использует первую стратегию управления (Стратегия 1) для управления подачей электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 до тех пор, пока ДВС 24 фактически не будет запущен. Затем, между 1,1 и 1,3 секунды по мере ускорения ДВС 24, электрическое питание подается от двигателя-генератора 144 на конденсаторную емкость 145 в нейтральном режиме управления. Когда коленчатый вал 100 достигает достаточной скорости вращения, приблизительно на 1,3 секунды, двигатель-генератор 144 начинает вырабатывание энергии при напряжении, которое склонно превышать номинальное напряжение конденсаторной емкости 145. Это происходит, когда БУД 164 начинает использовать вторую стратегию управления (Стратегия 2) для управления подачей электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 и различным электропотребителям (не показаны) транспортного средства. Также предполагается вариант, в котором нейтральный режим управления не реализован, при котором БУД 164 начинает использовать вторую стратегию управления сразу после того, как ДВС 24 был успешно запущен.
[00211] Фигура 16 представляет собой другую временную диаграмму, показывающую пример влияния стратегий управления на обмен током между конденсаторной емкостью и ЭПУ и на напряжение системы. График 420 показывает напряжение одной из Фаз А, В или С двигателя-генератора 144 с зависимостью от времени в секундах и с зависимостью от стратегий управления. В первой стратегии управления БУД 164 управляет применением управляющих импульсов к двигателю-генератору 144 в режиме широтно-импульсной модуляции (ШИМ) с очень быстрой частотой, которая, как правило, выражается в килогерцах. После этого, по мере начала запуска ДВС 24 в нейтральном режиме управления, двигатель-генератор 144 самостоятельно начинает вырабатывать напряжение, которое увеличивается до тех пор, пока режим не будет изменен на вторую стратегию управления, цикличность напряжения происходит с частотой, которая следует за вращением коленчатого вала 100. Можно наблюдать, что ввиду конфигурации инвертора 146, напряжение на каждой фазе двигателя-генератора меняется между нулем (0) вольт и номинальным напряжением системы без цикличности через отрицательные значения. График 422 показывает вариацию тока, протекающего между конденсаторной емкостью 145 и двигателем-генератором 144 по мере изменения БУД 164 первой стратегии управления на нейтральный режим управления и на вторую стратегию управления. Изначально в первой стратегии управления трехфазный ток протекает от конденсаторной емкости 145 к двигателю-генератору 144 через инвертор 146. Для большей части нейтральной стратегии управления все транзисторы Т1-Т6 инвертора являются незамкнутыми и ток не протекает между конденсаторной емкостью 145 и двигателем-генератором 144. После запуска ДВС 24 каждой фазой двигателя-генератора 144 вырабатывается существенный ток. БУД 164 применяет шунтирование фаз двигателя-генератора 144 для предотвращения превышения напряжения на его выходе, как изображено сильными вариациями тока в правой части графика 422. График 424 показывает текущее напряжение, измеренное на конденсаторной емкости 145 по мере изменения БУД 164 первой стратегии управления на нейтральный режим управления и на вторую стратегию управления. Напряжение конденсаторной емкости 145 изначально уменьшается при подаче электрического питания на двигатель-генератор 145. После запуска ДВС 24 БУД 164 переводит систему в нейтральный режим управления. Разрядка диодов D1-D6 обратной цепи вызывает малое увеличение напряжения конденсаторной емкости 145. Размыкание транзистора Q2 в начале функционирования во второй стратегии управления временно изолирует конденсаторную емкость 145 от двигателя-генератора, так что электрическое питание, выработанное двигателем-генератором, в целом доступно для других нужд системы, таких как впрыскивание, воспламенение, управление и тому подобное. Замыкание транзистора Q1 обеспечивает возможность зарядки конденсаторной емкости 145 при напряжении, которое колеблется вблизи номинального напряжения системы в соответствии с шунтированием двигателя-генератора 144.
[00212] Значения времени, значения скорости вращения и значения крутящего момента, изображенные на различных графиках 400, 402, 410, 412, 420, 422 и 424, представлены в целях иллюстрации и не ограничивают настоящее раскрытие. Фактические значения могут в большой степени зависеть от конструкции ДВС 24, двигателя-генератора 144, конденсаторной емкости 145 и от стратегии функционирования БУД 164.
Конкретное применение первой стратегии управления
[00213] Здесь будет описана реализация первой стратегии управления, применимая как к процедуре электрического запуска, так и процедуре вспомогательного запуска. Как разъяснено в настоящем документе выше, настоящий снегоход 10 (или другое транспортное средство, сконструированное в соответствии с идеями настоящего раскрытия) включает ДВС 24, оснащенный двигателем-генератором 144, функционально соединенным с коленчатым валом 100, конденсаторную емкость 145, БУД 164, одну форсунку 132А, 132В непосредственного впрыска топлива в каждом цилиндре 106А, 106B и ДАПКВ 170 или равноценный датчик, обеспечивающий БУД 164 возможность непрерывного получения информации об абсолютном угловом положении коленчатого вала 100, пока ДАПКВ 170 и БУД 164 находятся во включенном состоянии.
[00214] В реализации, где ДВС 24 не оснащен системой декомпрессии, конденсаторная емкость 145 и двигатель-генератор 144 могут быть неспособны вырабатывать достаточный крутящий момент для быстрого удаления газов, оставшихся в камерах сгорания 120А, 120B после остановки ДВС 24. По этой причине в реализации к коленчатому валу 100 сначала применяется низкий уровень крутящего момента, чтобы поршни 116А, 116B медленно вытесняли остаточные газы из камер сгорания 120А, 120B. После удаления достаточной части газов к коленчатому валу 100 применяется более высокий уровень крутящего момента, чтобы вывести один из поршней 116А, 116B в положение ВМТ и за него для запуска ДВС 24. В другой реализации, где ДВС 24 оснащен системой декомпрессии (не показана), или в еще одной реализации, где конденсаторная емкость 145 и двигатель-генератор 144 способны вырабатывать достаточный крутящий момент, к коленчатому валу на всем протяжении процедуры может применяться более высокий крутящий момент.
[00215] В реализации без системы декомпрессии, когда ДВС 24 остановлен, поршни 116А, 116B быстро замедляются и стремятся к фактическому прекращению своего движения в естественной точке, в которой давление в камерах сгорания 120А, 120B достаточно низкое. В двухцилиндровом двигателе один из поршней 116А или 116B обычно останавливается приблизительно в промежутке от 100 до 80 градусов перед ВМТ, что обусловлено конфигурацией основных и вспомогательных выпускных отверстий 136А, 136B, 138А, 138B. Когда ДВС 24 запускается вновь, этот поршень 116А или 116B сначала перемещается вверх, в направлении положения ВМТ. В реализации, показанной, к примеру, на Фигурах 4А и 4В, движение поршня (поршень 116B на Фигурах 4А и 4В) вверх имеет свойство выталкивать газы, оставшиеся в камере сгорания 120B, для выхода через основное выпускное отверстие 136B и через вспомогательное выпускное отверстие 138B, часть оставшихся газов также обходит как минимум одно кольцо 117В поршня 116B, пока поршень 116B не окажется в промежутке приблизительно от 50 до 0 градусов перед ВМТ. Поскольку выпускные отверстия 136B, 138B изначально открыты, приблизительно до 60 градусов перед ВМТ, это движение поршня 116B требует очень мало энергии. В то же время противоположный поршень 116А удаляется от своего положения ВМТ и не выполняет сжатие, поэтому это движение противоположного поршня 116А также осуществляется при весьма малых затратах энергии.
[00216] После закрытия выпускных отверстий 136B, 138B поршень 116B начинает сжимать оставшиеся в камере сгорания 120А газы, при этом незначительная часть оставшихся газов вытесняется вокруг как минимум одного кольца 117А поршня 116B. Для продолжения вращения коленчатого вала 100 требуется большее усилие, и, начиная с момента, когда поршень 117 В находится в промежутке приблизительно от 50 до 0 градусов перед ВМТ, применяется больший крутящий момент.
[00217] Непосредственно после того, как поршень 116B преодолеет положение ВМТ, он находится в надлежащем положении для воспламенения. За счет абсолютного углового положения коленчатого вала 100, выданного ДАПКВ 170, момент, когда поршень 116B находится в положении ВМТ, известен с достаточной степенью точности для того, чтобы БУД 164 мог управлять впрыском количества топлива, которое может быть рассчитано частично с учетом показаний одного или нескольких из следующих датчиков 167, 170, 171, 172, 174, 176 и 182, в камере сгорания 120B форсункой 132В непосредственного впрыска топлива, когда поршень 116B находится в диапазоне приблизительно от 3 градусов перед ВМТ до 7 градусов после ВМТ, а затем управлять воспламенением топлива свечой зажигания 134В, прежде чем поршень 116B вновь пройдет положение ВМТ, например от 0 до 12 градусов после ВМТ.
[00218] Фигура 17 представляет собой еще одну временную диаграмму, показывающую пример изменения крутящего момента, действующего на ЭПУ при первой стратегии управления. На графике 430 показано изменение крутящего момента, подаваемого на двигатель-генератор 144, в зависимости от времени, в секундах. График 430 представлен не в масштабе. Работа ДВС 24 в период, показанный на графике 430, относится к первой стратегии управления, поскольку подача электрического питания осуществляется от конденсаторной емкости 145 на двигатель-генератор 144.
[00219] Управление уровнем крутящего момента, применяемого к двигателю-генератору 144, может осуществляться путем регулирования тока, подаваемого через инвертор 146 на двигатель-генератор 144. С этой целью в описанной выше векторной технологии, включая любой из ее вариантов, может использоваться абсолютное угловое положение коленчатого вала 100 для получения абсолютного углового положения ротора 150 двигателя-генератора 144, которое в свою очередь используется как основа для регулирования тока и, следовательно, уровня крутящего момента, применяемого двигателем-генератором 144 к коленчатому валу 100. Вновь обращаясь к Фигуре 13, абсолютное угловое положение коленчатого вала 100 передается в зашифрованном виде по мере того, как сигналы uA, uS 514 применяются к квадратурному таймеру 516 привода 500 векторного управления.
[00220] В реализации процедуры электрического запуска ДВС 24 останавливается в начальный момент времени t0 (0 сек.), а операции 300, 302, 304, 322, 306, 308 и 310, изображенные на Фигуре 9 (некоторые из которых являются необязательными) только что завершились. В реализации процедуры вспомогательного запуска вращение коленчатого вала 100 инициировал пользователь. Операции 600, 602, 604, 606, 608, 610, 612, изображенные на Фигуре 11 (некоторые из которых являются необязательными) только что завершились в начальный момент времени t0. В обоих случаях ДАПКВ 170 включается и готов к определению абсолютного углового положения коленчатого вала 100 (или, в качестве альтернативы, датчик абсолютного положения определяет угловое положение компонента ДВС 24, вращающегося синхронно с коленчатым валом 100, например, датчик 177 передает угловое положение водяного насоса 173), как при операции 324 в случае процедуры электрического запуска, так и при операции 624 в случае процедуры вспомогательного запуска. Начиная от этой точки, последовательность, показанная на графике 430, применяется к обеим процедурам. Как разъяснено в настоящем документе выше, в двухцилиндровом двигателе один из поршней 116А, 116B, как правило, останавливается в заданном положении, приблизительно от 100 до 80 градусов перед ВМТ, если в начальный момент времени to присутствует остановка ДВС 24 и это состояние.
[00221] В ответ на команду пользователя о запуске ДВС 24, подаваемой в форме активации переключателя 168 электрического запуска или в форме тяги за шнур 158 стартера 156 обратного хода, БУД 164 контролирует начало подачи электрического питания на двигатель-генератор 144 для вращения коленчатого вала 100. Привод 500 векторного управления регулирует уровень крутящего момента, применяемого к ротору 150 двигателя-генератора 144. Сначала крутящий момент подается на умеренном уровне ε от начального момента времени t0, когда поршень 116B находится приблизительно между 100 и 80 градусами перед ВМТ. Крутящий момент увеличивается в направлении уровня α до момента времени t1, когда поршень находится приблизительно в промежутке от 50 до 0 градусов перед ВМТ. В это время поршень 116b эффективно блокирует выпускные отверстия 136B и 138B, и весь газ, оставшийся в камере 120B сгорания будет либо сжат, либо вытеснен при пониженной скорости вокруг как минимум одного кольца 117В. С этого момента времени t1 привод 500 векторного управления регулирует подачу крутящего момента на повышенном уровне β. Вскоре после этого, в момент времени 12, поршень находится в диапазоне приблизительно от 3 градусов перед ВМТ до 7 градусов после ВМТ. БУД 164 активирует форсунку 132В непосредственного впрыска топлива для впрыскивания расчетного количества топлива в камеру сгорания 120B. Затем, в момент времени t3, когда поршень 116B находится в промежутке приблизительно от 0 до 12 градусов после ВМТ, БУД 164 активирует свечу зажигания 134 В для воспламенения топлива в камере сгорания 120B. Это воспламенение во многих случаях эффективно запускает ДВС 24 в момент времени t4.
[00222] Разумеется, запуск ДВС 24 может потребовать непрерывной подачи крутящего момента к коленчатому валу 100 двигателем-генератором 144, как и впрыска и воспламенения топлива в камерах сгорания 120А, 120B, в нескольких циклах операций 326, 328, 330 и 332 по Фигуре 9 или в нескольких циклах операций 626, 628, 630 и 632 по Фигуре 11. ДВС 24 считается запущенным в момент времени t5, когда коленчатый вал достигает заданного порогового значения вращения, например 600 об./мин. ДВС 24 теперь находится в нейтральном режиме управления.
[00223] Крутящий момент α от начального момента времени t0 до момента времени t1 может быть постоянным. В примере по Фигуре 17 электрическое питание сначала подается от конденсаторной емкости 145 к двигателю-генератору 144 с постепенно нарастающей скоростью, обеспечивая крутящий момент, увеличивающийся от низкого уровня 6 (который может равняться нулю или быть немного больше нуля) до тех пор, пока в момент времени t1 не будет достигнут уровень крутящего момента α в диапазоне от одного до десяти ньютон-метров (1-10 Нм). Когда поршень 116B находится приблизительно в промежутке от 50 до 0 градусов перед ВМТ в момент времени t1, крутящий момент подается на повышенном уровне β, достаточном для перемещения поршня 116B за положение ВМТ, например, в диапазоне от 10 до 15 Нм. В реализации уровень электрического питания, обеспечивающий эту величину крутящего момента β, соответствует максимальной способности подачи мощности конденсаторной емкости 145. В той же или другой реализации уровень электрического питания, обеспечивающий эту величину крутящего момента β, соответствует максимальной величине мощности и крутящего момента, которую может выдержать двигатель-генератор 144. Значения крутящего момента, описанные в настоящем документе, и значения времени, показанные на Фигуре 17, приведены в качестве примеров и не ограничивают настоящее раскрытие. В реализации, где ДВС 24 оснащен системой декомпрессии, крутящий момент может применяться на повышенном уровне β, начиная с начального момента времени t0 до момента, когда ДВС 24 будет надлежащим образом запущен.
[00224] Фигура 18 представляет собой диаграмму последовательности, показывающую операции способа для запуска двигателя внутреннего сгорания. Последовательность, показанная на Фигуре 18, содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Последовательность по Фигуре 18 реализована в ДВС 24, в котором двигатель-генератор 144 функционально соединен с коленчатым валом 100. Последовательность в одной реализации соответствует операциям 324, 326, 328 и 330 по Фигуре 9, и в той же или другой реализации операциям 624, 626, 628 и 630 по Фигуре 11. Для обеспечения наглядности и без ущерба для общности последовательность описывается в случае, когда поршень 116B находится в заданном положении приблизительно между 100 и 80 градусами перед ВМТ, в то время, когда пользователем инициирована одна из процедур - процедура электрического или вспомогательного запуска. Коленчатый вал 100 в это время не вращается (процедура электрического запуска) или только начинает вращаться (процедура вспомогательного запуска). Начальный впрыск и воспламенения произойдут в камере сгорания 120B, соответствующей поршню 116B. В это время противоположный поршень 116А находится приблизительно между 80 и 100 градусами после ВМТ и начнет движение от ВМТ, не сжимая газы в камере сгорания 120А.
[00225] Последовательность начинается от операции 800, когда датчик абсолютного положения, например ДАПКВ 170, включается, чтобы начать определять абсолютное угловое положение коленчатого вала 100, когда ДВС 24 остановлен или начинает вращение. ДАПКВ 170 остается во включенном состоянии, когда коленчатый вал 100 вращается. Абсолютное угловое положение коленчатого вала 100 определяется при операции 802, при этом абсолютное угловое положение коленчатого вала 100 соотносится с положением ВМТ поршня 116B в камере сгорания 120B ДВС 24. Как разъяснено в настоящем документе выше, ДАПКВ 170 может быть заменен любым датчиком абсолютного углового положения (не показан), который определяет абсолютное угловое положение компонента ДВС 24, вращающегося синхронно с коленчатым валом 100. В любом случае БУД 164 рассчитывает абсолютное угловое положение коленчатого вала 100 на основе показания, переданного ДАПКВ 170 или на основе обнаруженного абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом 100. При операции 804, когда ДВС 24 не оснащен системой декомпрессии, начинается подача электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 на первом уровне для вращения коленчатого вала 100. В некоторых случаях операция 804 может включать подоперацию 806, в которой подача электрического питания на двигатель-генератор 144 постепенно увеличивается с начального уровня ε до первого уровня, как показано на Фигуре 17, между моментами времени t0 и t1. Первый уровень, и, в частности, начальный уровень 6, и переход подачи питания между моментами времени t0 и t1 может быть определен с учетом исходного углового положения коленчатого вала 100. Первый уровень подачи электрического питания рассчитан так, чтобы двигатель-генератор 145 вырабатывал достаточный крутящий момент для вращения коленчатого вала 100 до момента, когда поршень 116B достигнет заданного положения перед положением ВМТ, например, между 50 и 0 градусов перед ВМТ. При операции 808 электрическое питание затем подается от конденсаторной емкости 145 на двигатель-генератор 144 на втором уровне больше, чем на первом уровне, когда поршень 116B достигает заданного положения перед положением ВМТ. Второй уровень подачи электрического питания рассчитывается так, чтобы двигатель-генератор 144 вырабатывал достаточный крутящий момент для перемещения поршня за положение ВМТ. Более детально, привод 500 векторного управления определяет угловое положение ротора 150 двигателя-генератора 144 по угловому положению коленчатого вала 100. Угловое положение ротора 150 используется в приводе 500 векторного управления сначала для расчета величины крутящего момента, достаточной для перемещения поршня 116B в заданное положение перед положением ВМТ, а затем для расчета величины крутящего момента, достаточной для перемещения поршня за положение ВМТ. Первый и второй уровни подачи электрического питания рассчитываются исходя из этих величин крутящего момента.
[00226] В реализации ДВС 24 с системой декомпрессии электрическое питание может подаваться от конденсаторной емкости 145 на двигатель-генератор 144 уже на втором уровне в процессе операции 804. В этом случае операции 804 и 808 могут рассматриваться по сути объединенными в одну операцию.
[00227] В любом случае впрыск топлива при операции 810 в камеру сгорания 120B ДВС 24 происходит после того, как поршень 116B переместится за положение ВМТ в первый раз. В реализации впрыск происходит в диапазоне приблизительно между 3 градусами до ВМТ и 7 градусами после ВМТ. Поскольку топливо было введено непосредственно в камеру сгорания 120B, в камере сгорания 120B топливо сразу становится доступным. Следовательно, при операции 812 топливо воспламеняется незамедлительно. Момент воспламенения при операции 812 может варьироваться, но оно произойдет до того, как поршень 116B пройдет положение ВМТ во второй раз. В одной реализации воспламенение происходит до того, как движение вниз поршня 116B приводит к открытию выпускных отверстий 136B, 138B, когда головка поршня 116B достигает верхней точки одного из выпускных отверстий 136B, 138B. В другой реализации воспламенение происходит приблизительно в течение 2 градусов поворота после впрыска, в диапазоне от 0 до 12 градусов после ВМТ.
[00228] Зачастую ДВС 24 запускается после выполнения операций 810 и 812 впрыска и воспламенения один раз. Это будет определяться на операции 330 по Фигуре 9 в случае электрического запуска или на операции 630 по Фигуре 11 в случае вспомогательного запуска путем определения, что скорость вращения коленчатого вала 100, рассчитанная БУД 164 по показаниям ДПКВ 171, достигла минимального порога. Подача электрического питания на двигатель-генератор 144 останавливается при операции 814 после запуска ДВС 24. В случаях, когда ДВС 24 не запустился после операции 812, последовательности по Фигурам 9 и 11, соответственно, могут продолжиться.
[00229] Фигура 19 представляет собой диаграмму последовательности, показывающую операции способа для управления подачей электрического питания между источником питания и ЭПУ. Последовательность, показанная на Фигуре 19, содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Последовательность по Фигуре 19 реализована в ДВС 24, в котором двигатель-генератор 144 электрически соединен с конденсаторной емкостью 145, как показано, например, на Фигуре 8. Последовательность может начаться при операции 902, когда пусковой сигнал 221 подается к транзистору Q2, который представляет собой пусковой электронный переключатель питания, для включения транзистора Q2, что обеспечивает подачу электрического питания от конденсаторной емкости 145 на двигатель-генератор 144 через транзистор Q2. Как показано на Фигуре 8, пусковой сигнал 221 может подаваться на драйвер 217, который в свою очередь подает пусковой сигнал на транзистор Q2. Подача пускового сигнала 221 может быть прервана при операции 904, при этом происходит выключение транзистора Q2 перед следующей операцией. Затем при операции 906 сигнал подзарядки 222 подается к транзистору Q1, который представляет собой оперативный электронный переключатель питания, для включения транзистора Q1, что обеспечивает подачу электрического питания от двигателя-генератора 144 на конденсаторную емкость 145 через транзистор Q1 и, опционально, через цепь 224 ограничения по току. Пусковой сигнал 222 может подаваться на драйвер 216, который в свою очередь подает сигнал подзарядки на транзистор Q1.
[00230] В реализации транзистор Q2 многократно включается и выключается при операции 902, например, путем периодической подачи и сбрасывания пускового сигнала 221 на драйвер 217 для ограничения подачи электрического питания от конденсаторной емкости 145 на двигатель-генератор 144. В варианте такая периодическая подача и сбрасывание пускового сигнала 221 выполняется под контролем БУД 164 в соответствии с режимом ШИМ.
[00231] В реализации, в которой предусмотрены конденсатор С1 и цепь 224 ограничения по току, операция 900 может предшествовать операции 902. В операции 900 сигнал включения 220 кратковременно подается, а затем сбрасывается для включения транзистора Q1, чтобы конденсаторная емкость 145 начала заряжать конденсатор С1, в то время как цепь 224 ограничения по току защищает транзистор Q1 от протекающего по нему избыточного тока. Как только в конденсаторе С1 начинает устанавливаться напряжение, операция 900 завершается, что приводит к выключению транзистора Q1, и последовательность продолжается с операции 900, как описано выше.
[00232] Способы, системы и двигатели внутреннего сгорания, реализованные в соответствии с некоторыми неограниченными вариантами настоящей технологии, могут быть представлены как показано ниже в пронумерованных пунктах.
[00233] Специалисту в данной области техники могут быть понятны модификации и изменения вышеописанных реализаций настоящей технологии. Например, предполагается, что ДВС 24 может быть снабжен системой декомпрессии. Система декомпрессии может сбрасывать давление в камерах 120А, 120B сгорания, тем самым уменьшая усилия сжатия, которые должны быть преодолены двигателем-генератором 144 на операциях 326 и 626, описанных выше. Таким образом, предполагается, что за счет наличия системы декомпрессии двигатель-генератор 144 может быть даже меньше и легче, уменьшая размер и вес конденсаторной емкости 145 соответствующим образом. Также, если предусмотрена система декомпрессии, последовательность по Фигуре 18 может быть изменена путем подачи электрического питания на двигатель-генератор уже на более высоком, втором уровне, начиная с операции 804. Приведенное выше описание предназначено для примера, а не в качестве ограничения. Таким образом, объем настоящей технологии не должен ограничиваться строго объемом прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2726148C2 |
| ТЕПЛОВОЙ ЛАЗЕРНЫЙ ДВИГАТЕЛЬ В.С.ГРИГОРЧУКА | 1998 |
|
RU2132473C1 |
| СИСТЕМА ЗАЖИГАНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2581837C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668884C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2670559C1 |
| ДВИГАТЕЛЬ С РАЗДЕЛЕННЫМ ЦИКЛОМ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2008 |
|
RU2435046C2 |
| СПОСОБ УЛУЧШЕНИЯ ТЕХНИЧЕСКИХ И ЭКОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С ИСКРОВЫМ ЗАЖИГАНИЕМ | 2013 |
|
RU2558720C2 |
| ТРАНСПОРТНЫЙ СНЕГОХОДНЫЙ КОМПЛЕКС ЛЕГКОГО КЛАССА "МЕТЕЛИЦА" | 2010 |
|
RU2440269C2 |
| СИСТЕМА ЭЛЕКТРОСТАРТЕРНОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2049261C1 |
| Силовая установка | 1986 |
|
SU1366665A1 |

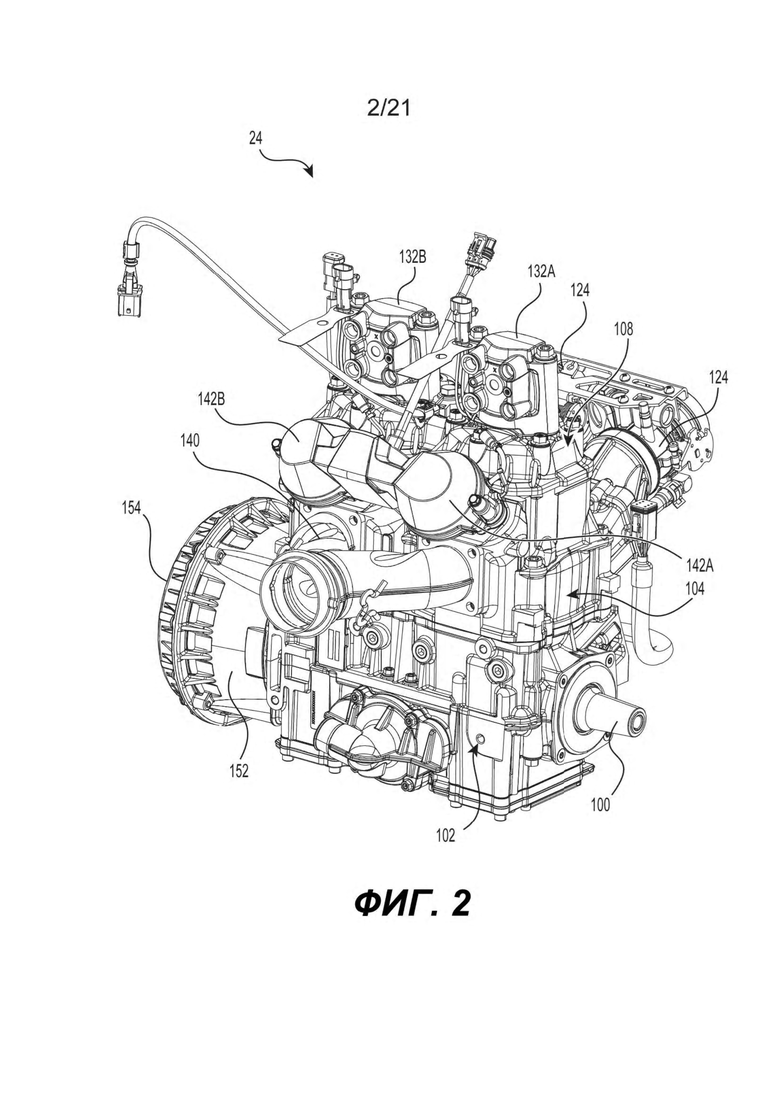
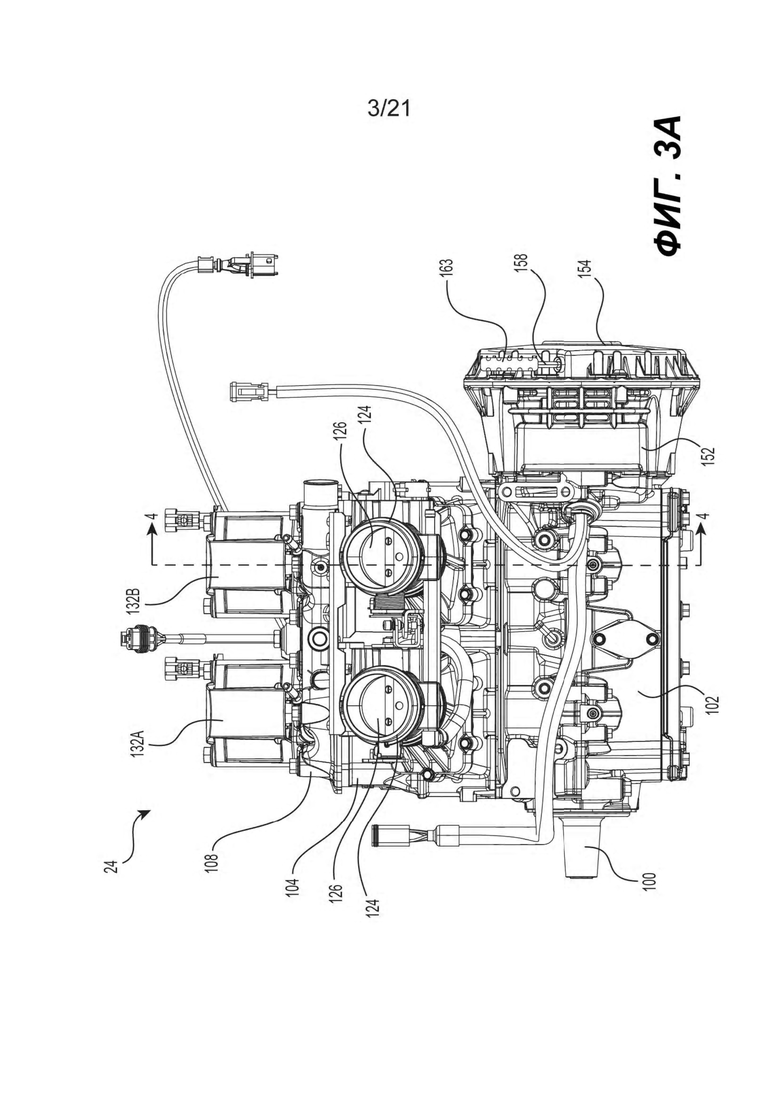
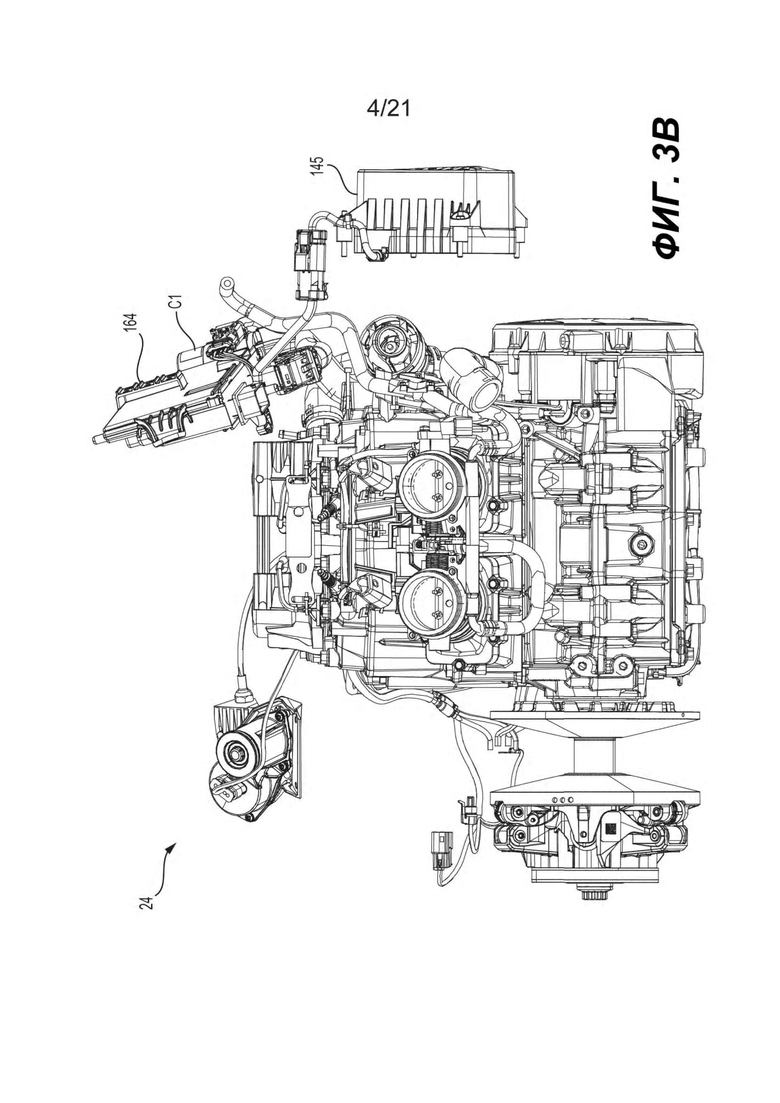
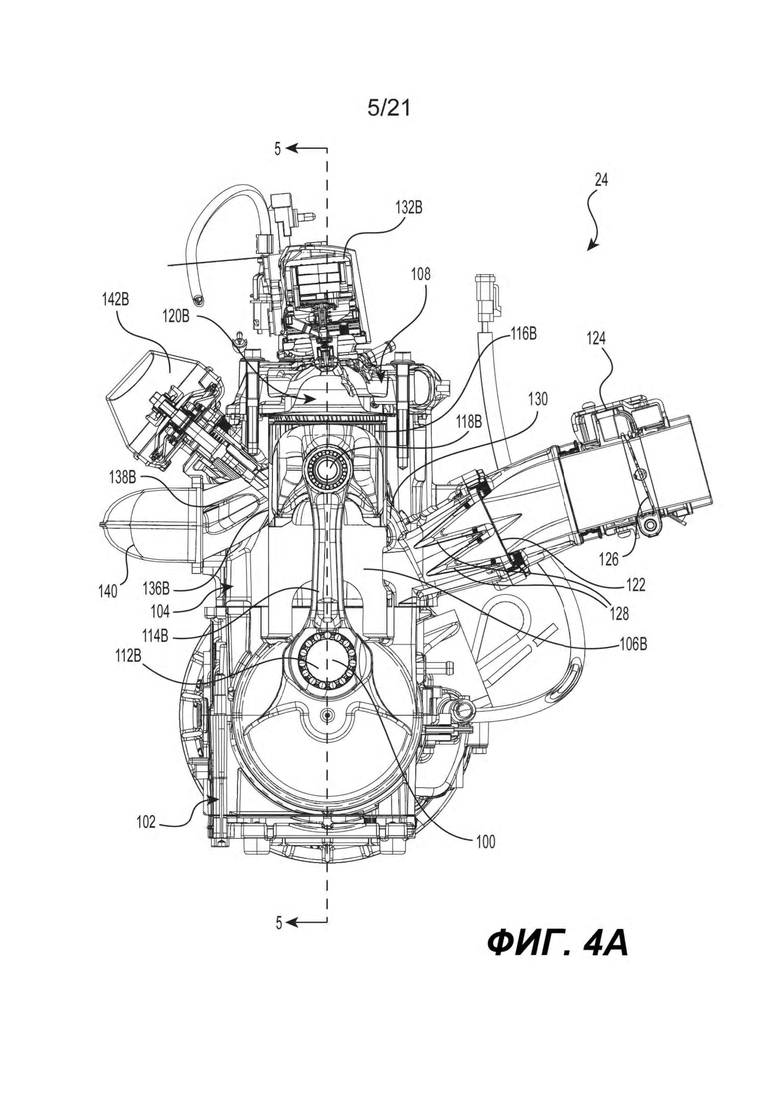
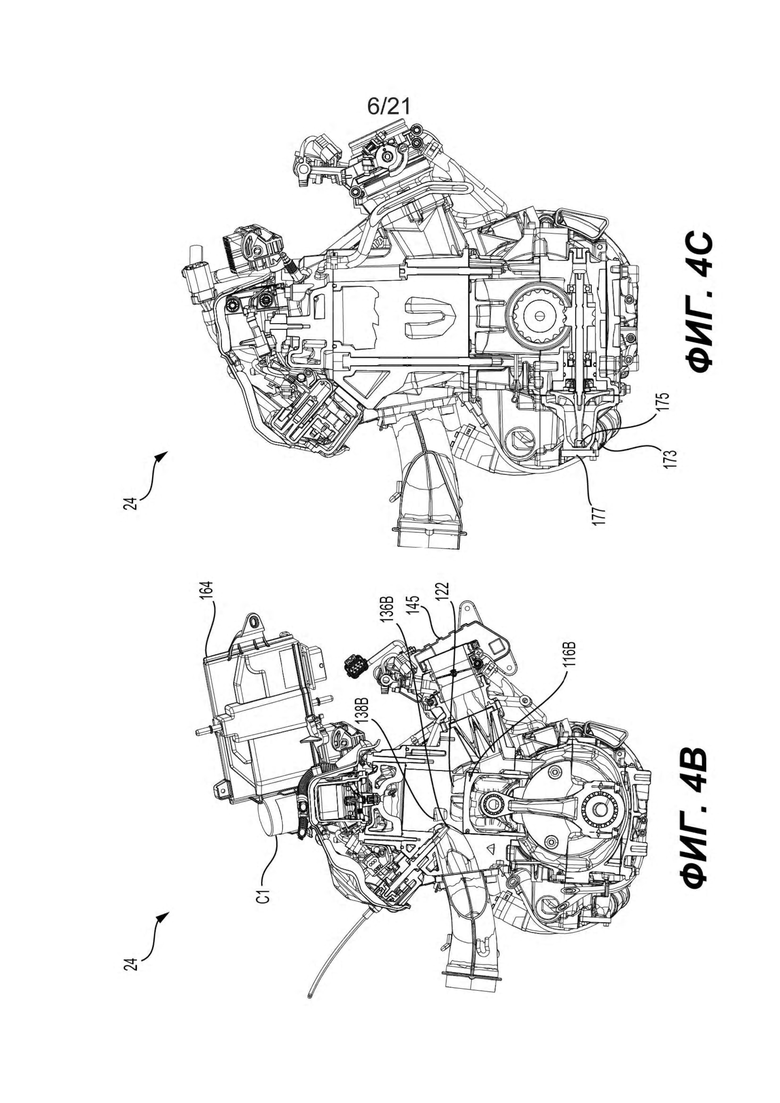
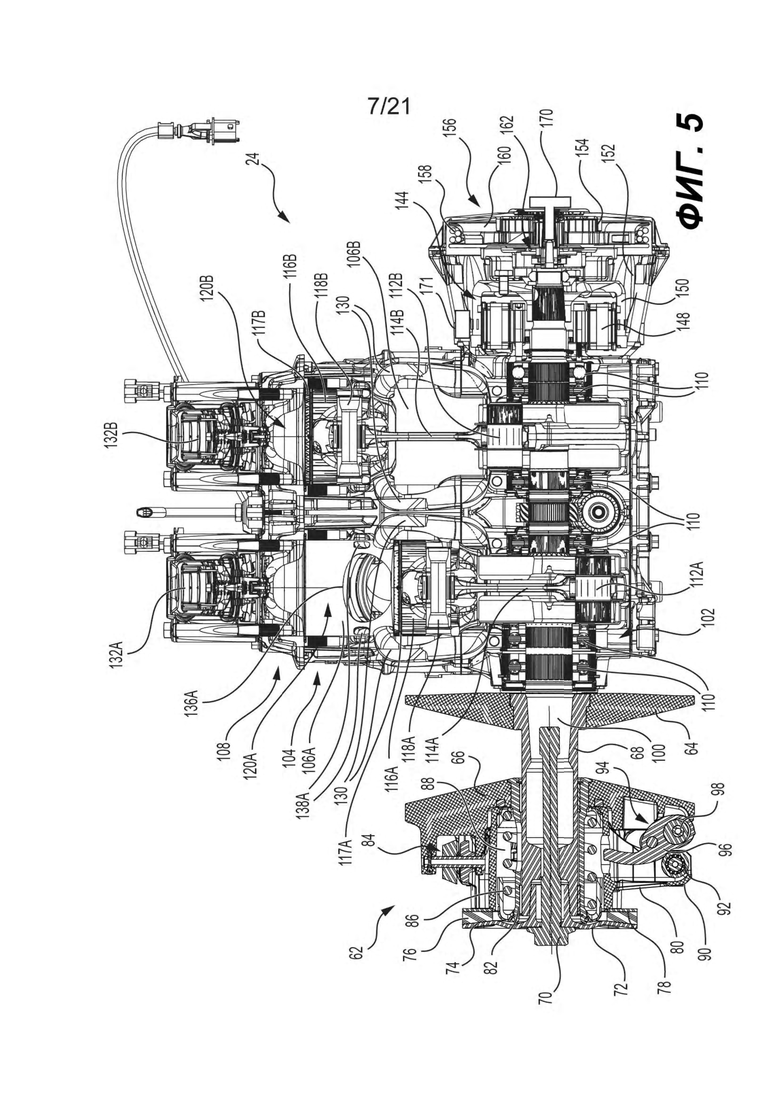
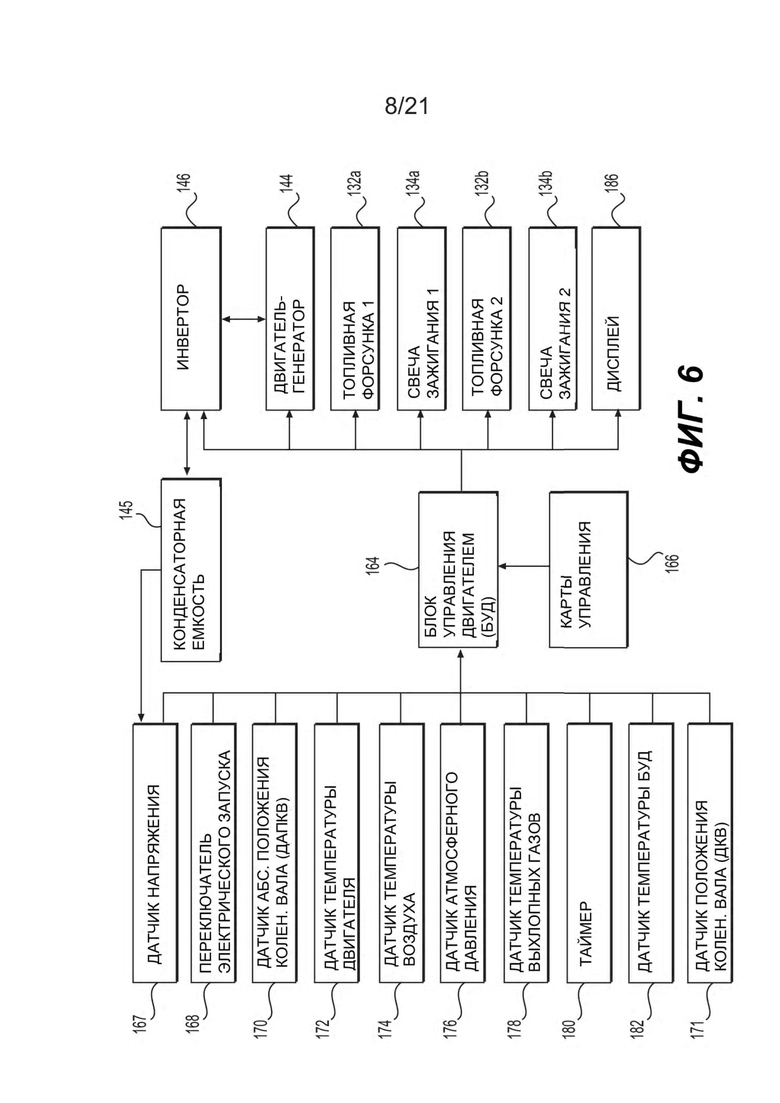

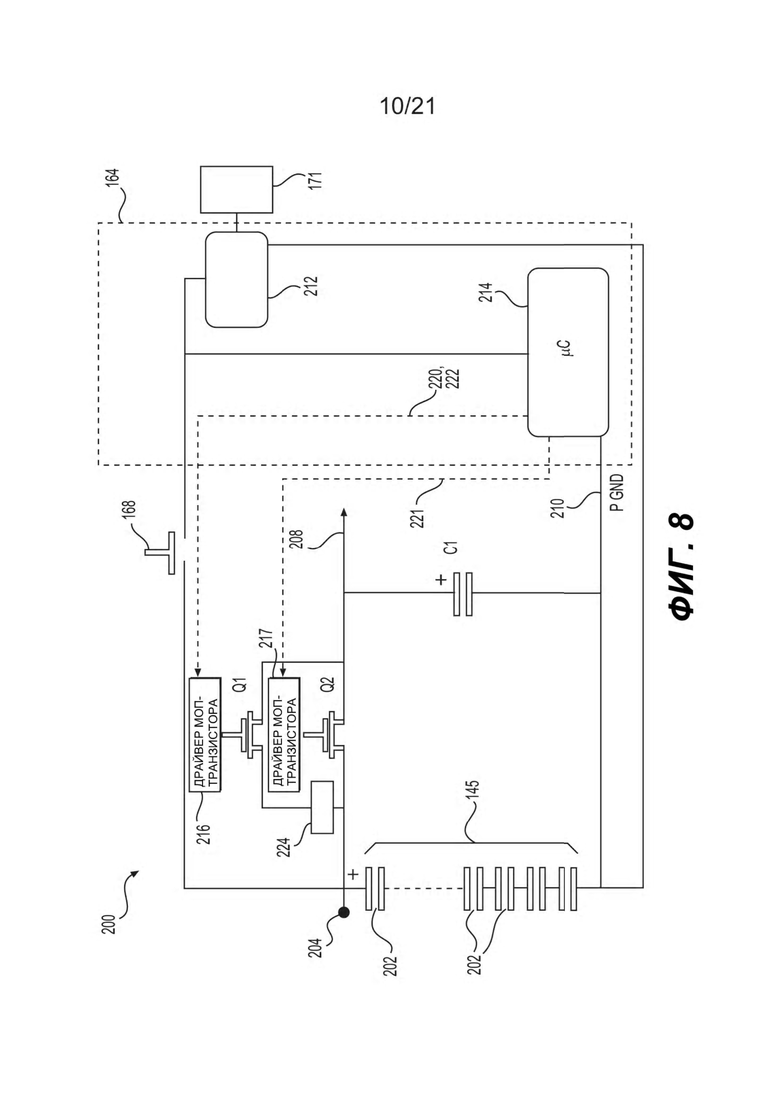
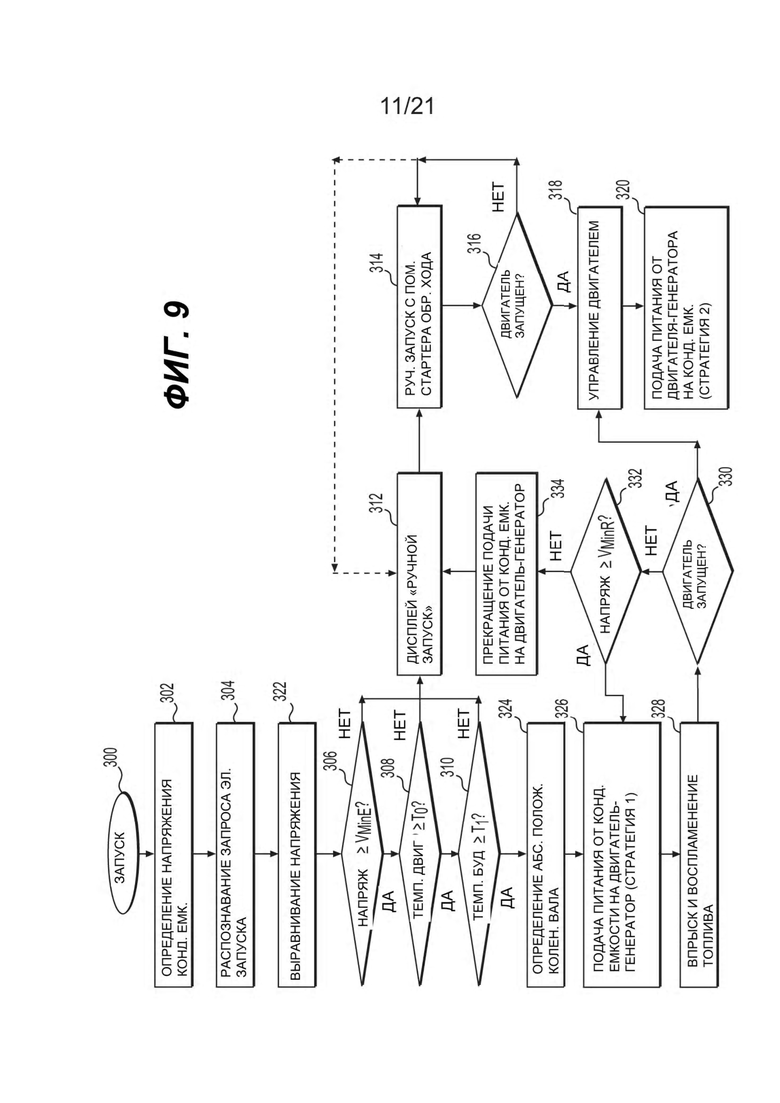
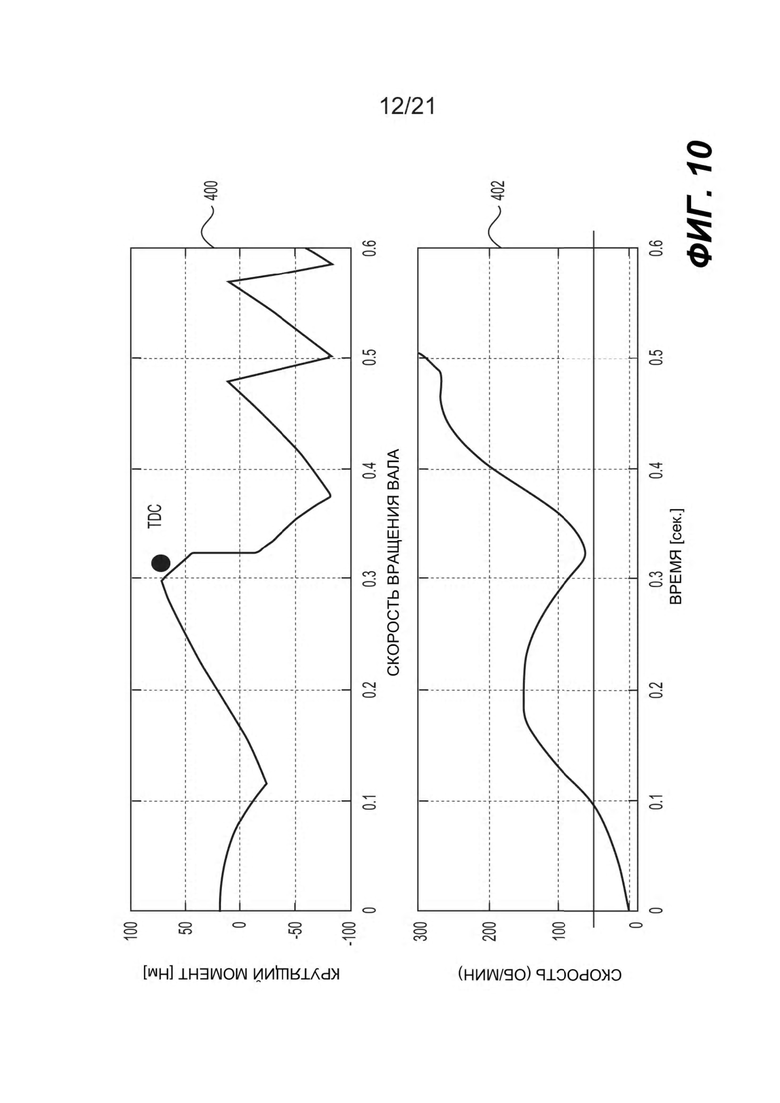
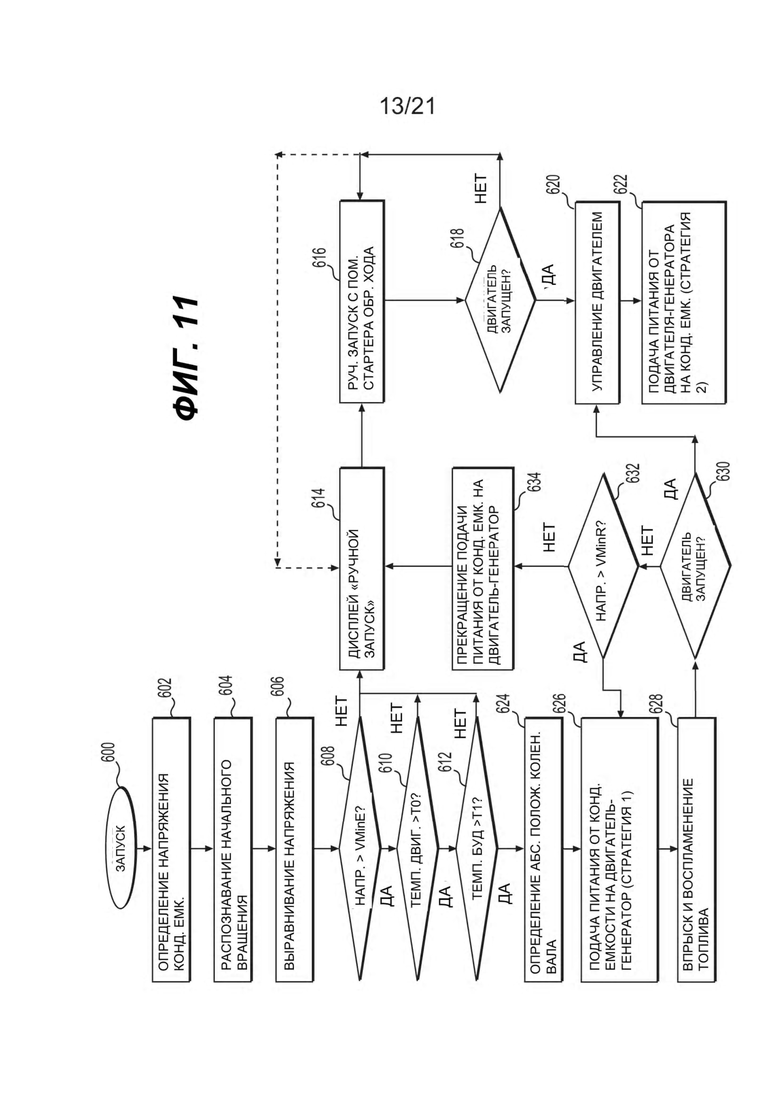
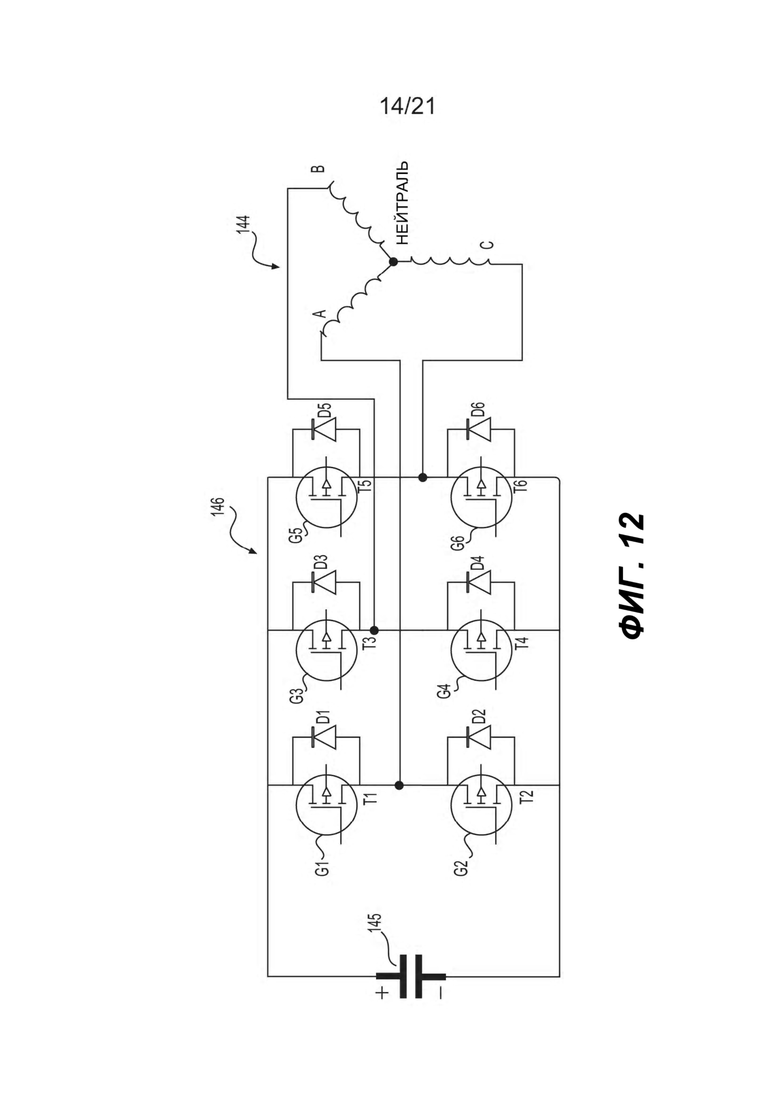
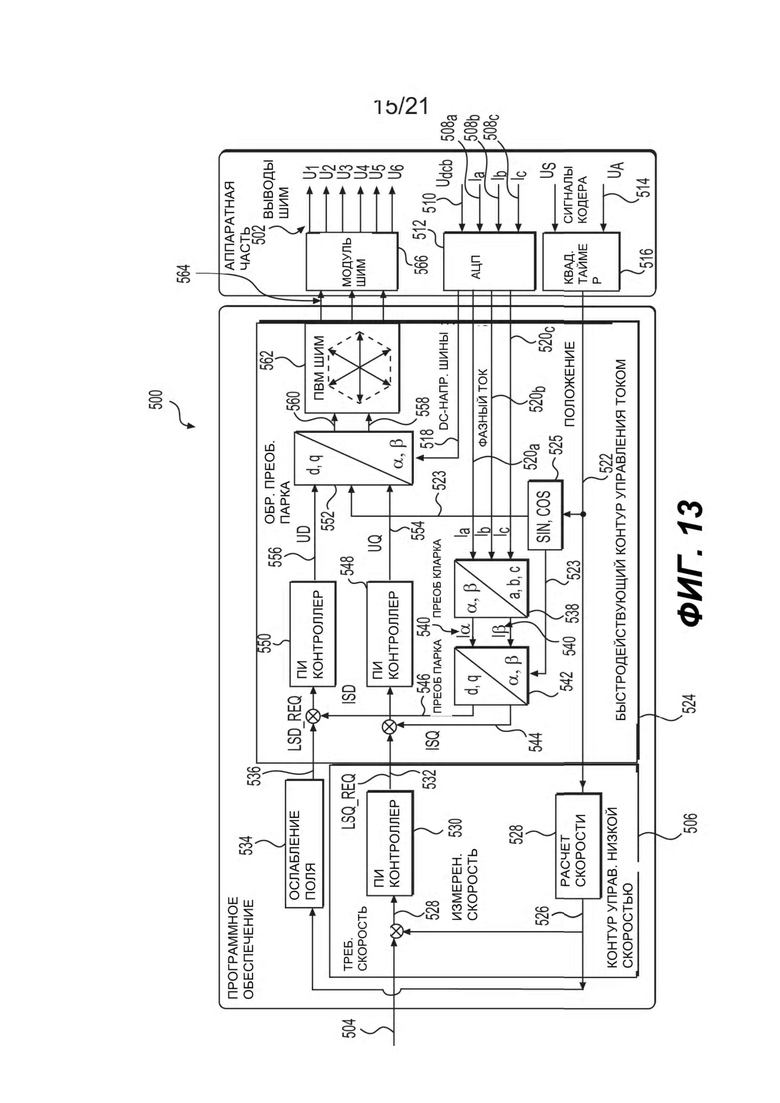
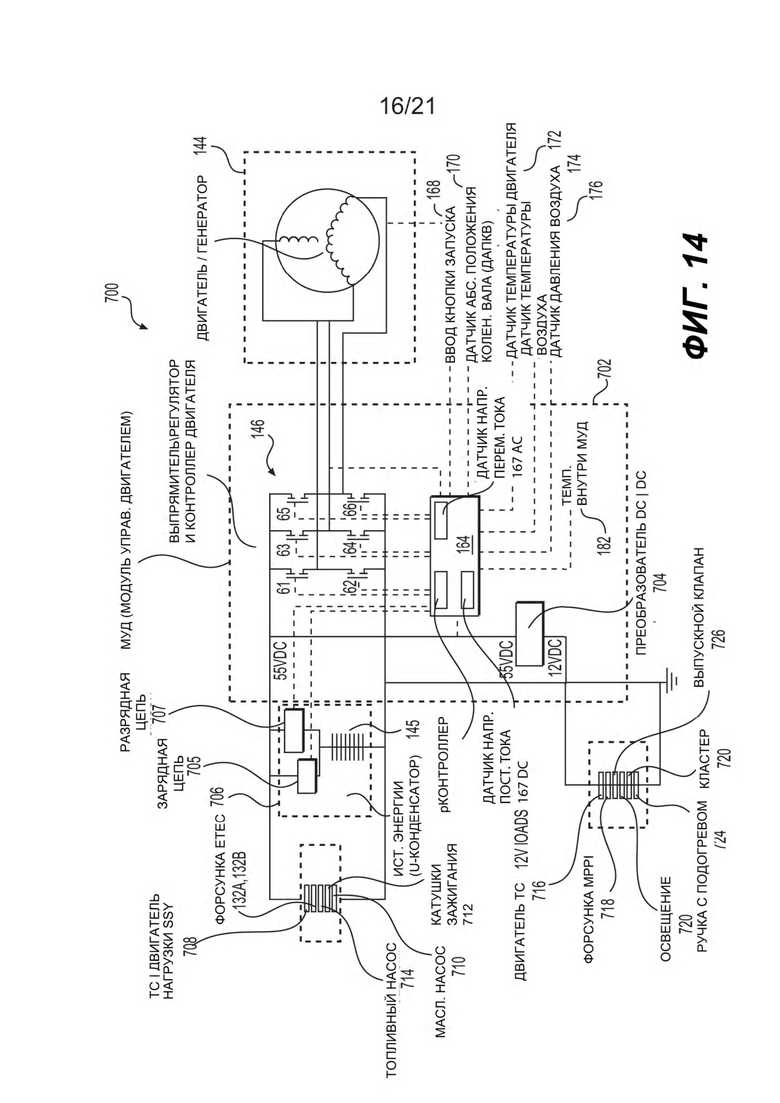
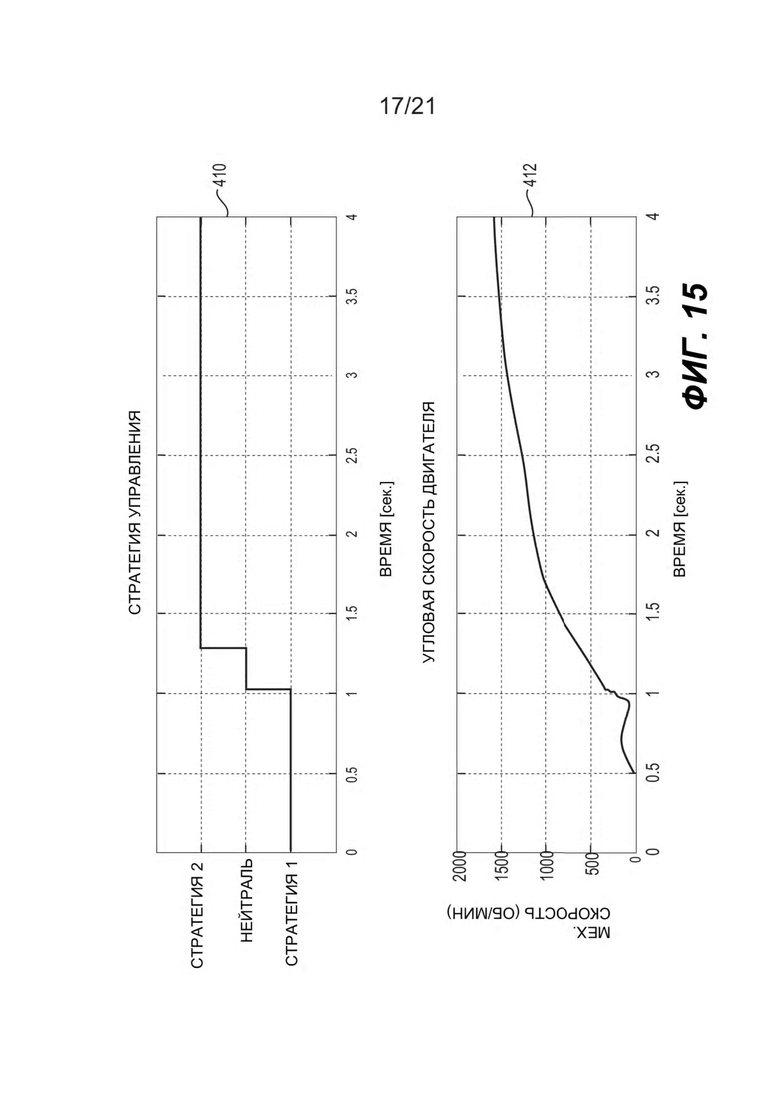
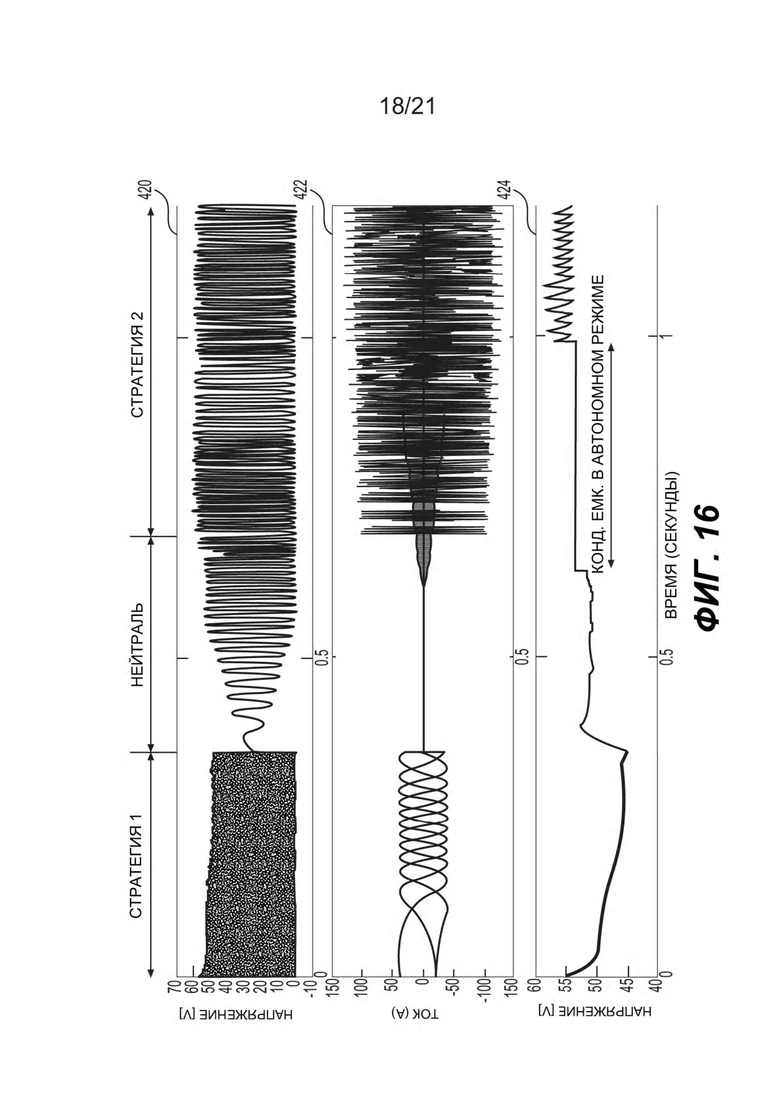
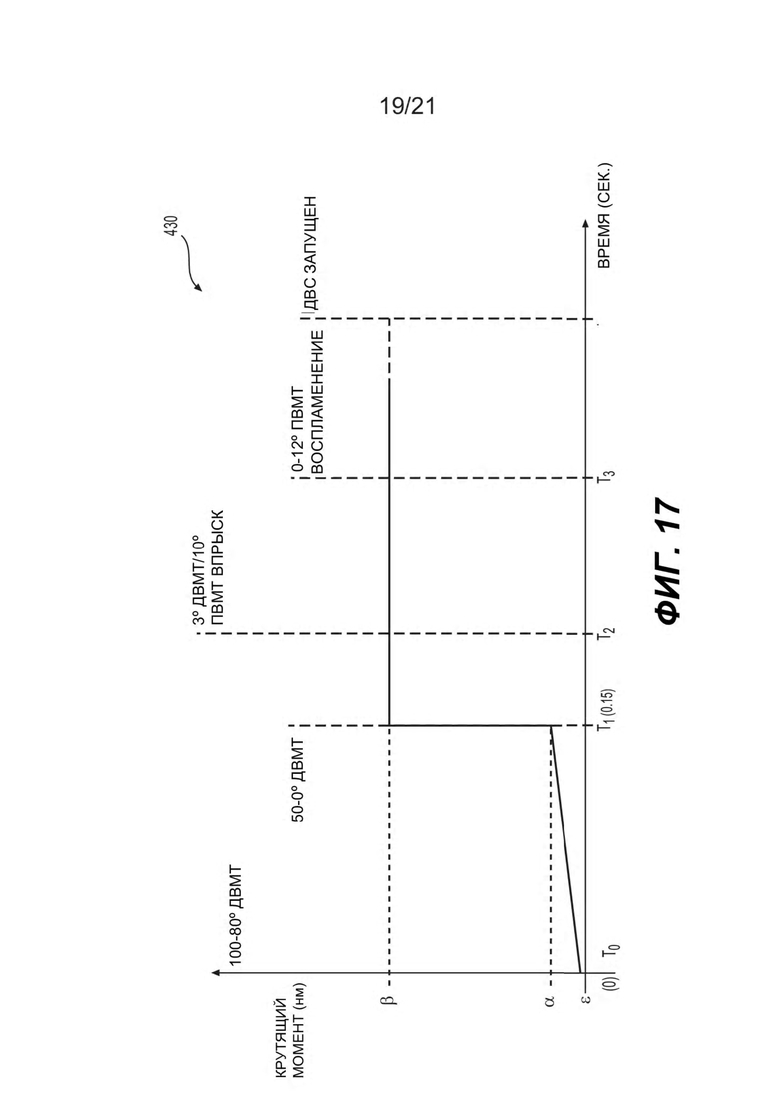


Раскрыты способ для запуска двигателя внутреннего сгорания (ДВС), имеющего коленчатый вал и электрическое поворотное устройство (ЭПУ), функционально соединенное с коленчатым валом. Определено абсолютное угловое положение коленчатого вала, соотнесенное с положением верхней мертвой точки поршня в камере сгорания ДВС. На первом уровне электрическое питание подается на ЭПУ для вращения коленчатого вала. Затем на втором уровне происходит подача электрического питания на ЭПУ больше, чем на первом уровне, когда поршень достигает заданного положения перед положением ВМТ. Впрыск топлива в камеру сгорания происходит после того, как поршень перемещается за положение ВМТ. Затем топливо воспламеняется. В реализации ДВС запускается менее чем за 110 градусов поворота коленчатого вала. 22 з.п. ф-лы, 22 ил., 1 табл.
1. Способ для запуска двигателя внутреннего сгорания (ДВС), имеющего коленчатый вал и электрическое поворотное устройство (ЭПУ), функционально соединенное с коленчатым валом, способ включает:
определение абсолютного углового положения коленчатого вала, абсолютное угловое положение коленчатого вала соотносится с угловым положением ротора ЭПУ;
подачу электрического питания на ЭПУ на первом уровне для вращения коленчатого вала; и
подачу электрического питания на ЭПУ на втором уровне больше, чем на первом уровне, когда ротор ЭПУ достигает заданного углового положения.
2. Способ по п. 1, дополнительно включающий:
расчет первого уровня подачи электрического питания, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала до достижения ротором заданного углового положения; и
расчет второго уровня подачи электрического питания, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала после заданного углового положения ротора.
3. Способ по п. 2, в котором:
расчет первого уровня подачи электрического питания включает использование векторного управления подачей электрического питания на первом уровне с учетом предварительного определения достаточного крутящего момента для вращения коленчатого вала до достижения ротором заданного углового положения; и
расчет второго уровня подачи электрического питания включает использование векторного управления подачей электрического питания на втором уровне с учетом предварительного определения достаточного крутящего момента для вращения коленчатого вала после заданного углового положения ротора.
4. Способ по п. 1, дополнительно включающий подачу питания к датчику абсолютного положения, используемому для определения абсолютного углового положения коленчатого вала при остановленном ДВС.
5. Способ по п. 4, дополнительно включающий подачу питания к датчику абсолютного положения при вращающемся коленчатом вале.
6. Способ по любому из пп. 1-5, дополнительно включающий постепенное увеличение подачи электрического питания на ЭПУ от исходного уровня до первого уровня перед подачей электрического питания на ЭПУ на втором уровне.
7. Способ по любому из пп. 1-5, где абсолютное угловое положение коленчатого вала дополнительно соотносится с положением поршня в камере сгорания ДВС по отношению к положению верхней мертвой точки (ВМТ) поршня.
8. Способ по п. 7, в котором:
подача электрического питания на ЭПУ на втором уровне начинается, когда поршень достигает заданного положения перед положением ВМТ; и
способ дополнительно включает впрыск топлива в камеру сгорания ДВС, когда поршень проходит положение ВМТ первый раз, и воспламенение топлива в камере сгорания.
9. Способ по п. 8, дополнительно включающий определение первого уровня электрического питания, подаваемого на ЭПУ, по исходному угловому положению коленчатого вала.
10. Способ по п. 9, где исходное угловое положение коленчатого вала - это положение коленчатого вала при остановленном ДВС.
11. Способ по п. 9, где исходное угловое положение - это диапазон от 80 до 100 градусов перед положением ВМТ.
12. Способ по п. 8, где подача электрического питания на ЭПУ до достижения поршнем заданного положения перед положением ВМТ вызывает вытеснение газов из камеры сгорания.
13. Способ по п. 12, где заданное положение перед положением ВМТ определяется в соответствии с конфигурацией выпускных отверстий ДВС.
14. Способ по п. 8, где заданное положение перед положением ВМТ находится в диапазоне от 0 до 50 градусов перед положением ВМТ.
15. Способ по п. 8, дополнительно включающий прекращение подачи электрического питания на ЭПУ после запуска ДВС.
16. Способ по п. 15, где подача электрического питания на ЭПУ прекращается, когда число оборотов коленчатого вала достигает минимального порога.
17. Способ по п. 8, где топливо воспламеняется до того, как поршень проходит положение ВМТ во второй раз.
18. Способ по п. 8, где впрыск топлива в камеру сгорания происходит, когда положение поршня находится в диапазоне от 3 градусов перед положением ВМТ до 7 градусов после положения ВМТ.
19. Способ по п. 8, где воспламенение топлива происходит, когда поршень находится в диапазоне от 0 до 12 градусов после положения ВМТ, воспламенение топлива происходит после впрыска топлива.
20. Способ по п. 8, где воспламенение происходит до того, как поршень достигнет верхней точки выпускного отверстия в камере сгорания ДВС.
21. Способ по п. 8, в котором:
первый уровень подачи электрического питания рассчитывается так, чтобы ЭПУ вырабатывало достаточный крутящий момент для вращения коленчатого вала до достижения поршнем заданного положения перед положением ВМТ; и
второй уровень подачи электрического питания рассчитывается так, чтобы ЭПУ вырабатывало достаточный крутящий момент для того, чтобы поршень переходил за положение ВМТ.
22. Способ по любому из пп. 1-5, где определение абсолютного углового положения коленчатого вала включает распознавание абсолютного углового положения коленчатого вала.
23. Способ по любому из пп. 1-5, дополнительно включающий:
распознавание абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом, при этом компонент, вращающийся синхронно с коленчатым валом, выбирается из ротора ЭПУ, топливного насоса, масляного насоса, водяного насоса, кулачкового вала и уравновешивающего вала; и
расчет абсолютного углового положения коленчатого вала на основе обнаруженного абсолютного углового положения компонента ДВС, вращающегося синхронно с коленчатым валом.
| УСТРОЙСТВО ДЛЯ ЗАПУСКА И РЕГУЛИРОВАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2046989C1 |
| US 5458098 A1, 17.10.1995 | |||
| US 20020017261 A1, 14.02.2002 | |||
| US 6453863 B1, 24.09.2002 | |||
| US 20100294231 A1, 25.11.2010 | |||
| WO 2016016835 A1, 04.02.2016 | |||
| WO 2017081664 A2, 18.05.2017. | |||

