Уровень техники
Изобретение относится к способу, описанному в ограничительной части пункта 1 патентной формулы, к компьютерной системе, описанной в ограничительной части пункта 10 патентной формулы, к носителям для хранения, описанным в ограничительной части пункта 12 патентной формулы, и к оптической системе, описанной в ограничительной части пункта 13 патентной формулы.
При прохождении через неоднородную среду электромагнитной волны, ее волновой фронт искажается или деформируется относительно первоначальной формы. Указанные искажения волнового фронта могут приводить к аберрациям в оптической системе, что приводит к ухудшению ее характеристик.
Так, например, при проведении астрономических наблюдений с земли с помощью телескопа, фронты световой волны от удаленных астрономических объектов наблюдения искажаются из-за взаимодействия с турбулентной атмосферой Земли, а также из-за взаимодействия с оптическими элементами, к примеру, с линзами или с зеркалами телескопа, что ведет к ухудшению качества изображений.
При этом, также на характеристики оптических систем в других областях техники, таких как, например, фотография, медицинская визуализация, к примеру, томография тканей организма или микроскопия, неблагоприятно влияют искажения волнового фронта, возникающие вдоль оптического пути вследствие взаимодействия волновых фронтов с неоднородными средами.
Для коррекции таких деформаций или аберраций волнового фронта и для восстановления первоначальной формы волнового фронта, используются, помимо прочего, адаптивные оптические системы, предназначенные для измерения деформаций или аберраций волнового фронта с помощью так называемых датчиков волнового фронта.
Типичными примерами таких датчиков волнового фронта являются датчики Шака-Гартмана, пирамидальные датчики, интерференционные датчики сдвига и кривизны.
Недостаток известных датчиков волнового фронта состоит в том, что они технически сложны и, к примеру, сами могут содержать множество оптических элементов, например множество линз. Кроме того, анализ данных, генерируемых этими датчиками волнового фронта для восстановления исходного волнового фронта, требует значительных вычислительных ресурсов и является сложной задачей.
Проблема
Поэтому задачей настоящего изобретения является создание более совершенных средств для восстановления волнового фронта в оптической системе. Например, в частности, целью настоящего изобретения является упрощение и ускорение измерения искажений волнового фронта, в частности ускорение оценки крутизны волнового фронта, а также упрощение и ускорение восстановления исходного волнового фронта, то есть восстановление исходной формы волнового фронта.
Техническое решение
В соответствии с настоящим изобретением задача решается с помощью способа по п. 1 формулы изобретения, компьютерной системы по п. 10 формулы изобретения, носителя для хранения по п. 12 формулы изобретения и оптической системы по п. 13 формулы изобретения.
Предпочтительные варианты реализации и усовершенствования изобретения являются объектом зависимых пунктов формулы изобретения.
Типовой способ двумерного восстановления волновых фронтов, волновых фронтов оптического спектра для использования в оптической системе может включать один, несколько или все из следующих этапов:
- измерение функции распределения интенсивности света, например двумерной функции распределения интенсивности света, по меньшей мере по двум изображениям в разных оптических плоскостях, имеющих разность оптических путей;
- указанное измерение, включающее определение множества одномерных кумулятивных функций распределения интенсивностей света в каждой плоскости в диапазоне различных углов в каждой плоскости; и
- согласование определенных одномерных кумулятивных функций распределения различных оптических плоскостей для получения двумерных оценок крутизны волнового фронта в плоскости, например, в плоскости посередине, расположенной между указанными различными оптическими плоскостями;
- и интегрирование упомянутых оценок крутизны волнового фронта для восстановления двумерной формы волнового фронта в указанной плоскости, расположенной между указанными различными оптическими плоскостями.
Типовые оптические системы или оптические системы сбора данных могут, в силу этого, содержать цифровые камеры, например обычную двумерную камеру, телескопы, микроскопы, встроенный дисплей и другие системы визуализации.
В частности, изображения, полученные в различных оптических плоскостях оптической системы, могут, например, быть получены с помощью прибора с зарядовой связью (ПЗС).
В данном случае термин «измерение функции распределения интенсивности света на изображении», например двумерной функции распределения интенсивности света на изображении, можно, помимо прочего, понимать как определение функции распределения интенсивности света, например, двумерной функции распределения интенсивности света, исходя из известных характеристик оптической плоскости изображения. Например, если зрачок оптической системы достаточно хорошо характеризуется, например, функцией зрачка, то функцию распределения интенсивности света в плоскости зрачка можно определить непосредственно по параметрам оптической системы.
Кроме того, поскольку в таком типовом случае изображение на плоскости зрачка остается неизменным независимо от фронта проходящей волны, то изображение зрачка, то есть функцию распределения интенсивности света в плоскости зрачка, нужно определять или оценивать только один раз.
Кроме того, согласование определенных одномерных кумулятивных функций распределения различных оптических плоскостей может, например, выполняться путем попарного согласования одномерных кумулятивных функций распределения различных оптических плоскостей с использованием метрической функции или функции расстояния, которая измеряет расстояние между определенными одномерными кумулятивными функциями распределения по прямой или по оси, например по абсциссе, при тех же значениях функции расстояния.
Следует отметить, что здесь предполагается, что распространение волновых фронтов, то есть фронтов электромагнитных волн, или фотонов, должно следовать законам геометрической оптики, то есть, например, предполагается, что направление распространения перпендикулярно фронту волны. Для полноты следует отметить, что волновой фронт может быть определен набором точек волны, имеющей одинаковую фазу, то есть волновой фронт или форма волнового фронта может быть описана с помощью фазовой карты, например двумерной фазовой карты.
Кроме того, предполагается, что функция распределения интенсивности света распространяющегося волнового фронта может быть представлена дифференциальной функцией распределения (ДФР) вероятности прибытия фотона. Далее предполагается, что распространение волнового фронта сохраняет поток, т.е. что общая площадь под одномерной кривой ДФР остается постоянной.
Кроме того, следует отметить, что оптическая плоскость, в которой восстанавливается волновой фронт, может располагаться в любом месте вдоль оптического пути оптической системы. Другими словами, оптическая плоскость, в которой должен восстанавливаться волновой фронт, не обязательно должна совпадать с какой-либо конкретной оптической плоскостью, например, с плоскостью апертуры или с плоскостью зрачка оптической системы.
В частности, возможно, например, что изображения, полученные в разных оптических плоскостях, имеющих разность оптических путей, то есть изображения, в которых измеряется функция распределения интенсивности света, могут быть расположены как до, так и после и за плоскостью апертуры или зрачка оптической системы, так что оптическая плоскость, в которой должен быть восстановлен волновой фронт, также может быть расположена до, после или за плоскостью апертуры или зрачка оптической системы
Также возможно, что изображения, снятые в разных оптических плоскостях, имеющих разность оптических путей, то есть изображения, в которых измеряется функция распределения интенсивности света, могут быть расположены на различных расстояниях относительно возможной плоскости апертуры или плоскости зрачка.
Вышеописанный в качестве примера способ обеспечивает более эффективный и быстрый метод двумерной оценки крутизны волнового фронта и восстановления двумерной исходной формы волнового фронта по указанным двумерным оценкам крутизны волнового фронта, полученным поданным сдатчиков волнового фронта или полученным, например, от пар изображений, имеющих разность оптических путей, соответственно. В частности, представленный способ позволяет более эффективно восстанавливать первоначальную форму волнового фронта или исходную фазу волнового фронта, при этом вариации волнового фронта или интенсивности света происходят в двух измерениях, то есть в различных направлениях.
Кроме того, согласно настоящему изобретению, например, разрешение волнового фронта вдоль оптического пути, например вдоль оси z, с помощью изображений, принятых в плоскости xy и имеющих разность оптических путей, может достигать нескольких пикометров.
По сравнению с известными техническими решениями, которые, помимо прочего, требуют использование сложных конструкций датчиков волнового фронта, включающих множество оптических элементов, и которые также требуют сложные и громоздкие методики интеграции и параметризации волнового фронта, например, использование полиномов Цернике или преобразований Радона, представленный здесь способ обходится без таких ресурсоемких методов и параметризаций, тем самым значительно облегчая восстановление волнового фронта, в частности, применительно к скорости, с которой может быть рассчитан восстанавливаемый волновой фронт. Другими словами, способ преодолевает существующие технические предубеждения в том, что точная двумерная реконструкция волнового фронта требует ресурсоемких и сложных описаний параметров и преобразований волнового фронта.
Благодаря повышению своей вычислительной эффективности способ пригоден, например, для применения в реальном времени, например, для управления цепью обратной связи в адаптивной оптической системе.
Кроме того, сниженные затраты вычислительных ресурсов позволяют также реализовывать вышеописанный способ на обычных вычислительных процессорах (ВП) или графических процессорах (ГП), которые имеются в смартфонах, цифровых камерах, планшетах, ноутбуках, настольных компьютерах и в других общераспространенных электронных устройствах.
Другой полезный эффект описанного здесь способа заключается в том, что для измерения, - к волновому фронту никакие дополнительные пространственные или временные модуляции не прибавляются, так как нет необходимости в дополнительных оптических элементах для измерения или распознавания волнового фронта, как в случае, например, при измерении волнового фронта с помощью датчиков волнового фронта, таких как, к примеру, датчики Шака-Гартмана или пирамидальные датчики.
Указанное определение множества одномерных кумулятивных функций распределения интенсивностей света в каждой плоскости по диапазону различных углов в каждой плоскости можно понимать, помимо прочего, как определение множества одномерных кумулятивных функций распределения интенсивности света в каждой плоскости в диапазоне различных направлений, то есть в диапазоне различных прямых линий или, по меньшей мере, одной прямой линии в каждой плоскости, причем каждая из указанных прямых линий имеет наклон, который может быть охарактеризован углом.
Иными словами, указанные возможные углы в каждой плоскости могут определять наклоны для прямых линий в каждой плоскости, вдоль которых может быть определена одномерная кумулятивная функция (функции) распределения интенсивности света в каждой плоскости.
Возможный интервал различных углов в каждой плоскости, устанавливающий наклоны указанных прямых линий в каждой плоскости для определения множества одномерных кумулятивных функций распределения интенсивности света в каждой плоскости, к примеру, может, содержать по меньшей мере два разных угла в каждой плоскости, например два ортогональных угла, например 0° и 90°.
Также возможно, что углы или прямые линии, вдоль которых могут быть определены одномерные кумулятивные функции распределения интенсивности света в каждой плоскости, согласованы с предполагаемыми преобладающими направлениями или осями изменений волнового фронта или волнового фронта.
В то же время также возможно, что, если предполагается, что изменение волнового фронта происходит только под конкретным углом или по конкретному направлению, то для восстановления исходной формы волнового фронта или фазы волнового фронта определяется одномерная кумулятивная функция распределения.
Кроме того, вышеописанные типовые этапы могут обеспечить основу для выполнения томографии трехмерного распределения, то есть объемного распределения, волновых фронтов электромагнитных полей, например трехмерное распределение волновых фронтов вдоль оптической оси оптической системы, к примеру, над стеком изображений. Другими словами, способ, представленный в настоящей заявке, позволяет, например, получать трехмерное распределение волновых фронтов вдоль оптической оси оптической системы из стека или из серии восстановленных двумерных волновых фронтов. В частности, способ, описанный в данной заявке, обеспечивает вычислительно более быстрые и более эффективные методы выполнения указанной томографии трехмерного распределения волновых фронтов электромагнитных полей по сравнению с существующими способами томографии волнового фронта.
На вышеописанных этапах способа может быть получено одно из указанных по меньшей мере двух изображений, например, в плоскости зрачка, к примеру плоскости выходного зрачка или плоскости апертуры оптической системы.
Возможный типовой этап получения изображения в плоскости зрачка также можно понимать как характеристику изображения в плоскости зрачка на основе четко определенной характеристической модели зрачка оптической системы. Иными словами, одно из указанных по меньшей мере двух изображений может быть изображением, которое полностью характеризуется теоретическими и/или эмпирическими моделями. Иначе говоря, такое характеристическое изображение может быть рассчитано и не требует съемки или измерения с помощью камеры.
Как уже упоминалось выше, это составляет преимущество в том, что определение множества одномерных кумулятивных функций распределения в плоскости зрачка или плоскости апертуры может быть обосновано или получено на основании достаточно четко определенной модели зрачка или апертуры, т.е. четко определенной и/или хорошо охарактеризованной функции зрачка или функции диафрагмы.
Кроме того, возможно, что по меньшей мере одно изображение может быть сфокусировано, а именно, в расфокусированной плоскости оптической системы.
В частности, можно допустить, что одно изображение рассматривается с внутренней стороны фокуса или перед фокусом, и одно изображение - с внешней стороны фокуса или после фокуса, т.е. одно изображение перед фокальной плоскостью и одно изображение за фокальной плоскостью оптической системы. Другими словами, оба из по меньшей мере двух изображений могут быть расфокусированы.
Также возможно, что все отснятые изображения не сфокусированы, то есть все изображения могут быть расфокусированы.
В то же время также возможно, что некоторые или все изображения из различных оптических плоскостей могут быть сфокусированы.
Кроме того, следует отметить, что описанный здесь способ, может также применяться в афокальных оптических системах, то есть в оптических системах без фокусировки. Просто требуется наличие разности оптического пути между измеренными или определенными изображениями.
Может использоваться любая разность оптических путей между измеренными или определенными изображениями. Например, в качестве разности оптических путей может использоваться часть или общая длина оптической системы. Таким образом, размер или длина разности оптических путей может определять разрешение, с которым может оцениваться крутизна волнового фронта, или форма волнового фронта, или фаза волнового фронта. В частности, увеличение разности оптических путей, то есть увеличение расстояния между оптическими плоскостями между измеренными или определенными изображениями, может увеличить разрешение фазы волнового фронта или форму восстанавливаемого волнового фронта.
Как указано выше, описанный в настоящей заявке способ может, помимо прочего, обеспечить томографию трехмерного распределения, то есть объемного распределения, волновых фронтов электромагнитных полей, например трехмерное распределение, волновых фронтов вдоль оптической оси оптической системы. Основой для получения такой фазовой томографии или томографии волнового фронта могут служить изображения, снятые в разных оптических плоскостях, и имеющих разность оптических путей, и в которых, к примеру, указанные изображения получены детектором изображений с помощью прибора с зарядовой связью (ПЗС), например, обычной двумерной цифровой камерой. Следовательно, указанные изображения могут служить основой для предоставления результата томографического измерения трехмерного распределения фазы волнового фронта.
Другими словами, например, возможно, по нескольким изображениям, например, по более, чем двум изображениям, снятым в различных оптических плоскостях, восстановить множество двумерных форм волнового фронта во множестве оптических плоскостей.
Это, к примеру, обеспечивает преимущество, состоящее в выполнении указанной фазовой или волновой томографии для просмотра изображаемого объекта с разных точек обзора, сохраняя при этом двумерное разрешение изображения.
В качестве альтернативы или в дополнение, фазовая томография волнового фронта может быть выполнена на основе оценки фазы волнового фронта или оценки крутизны волнового фронта не по всему размеру измеренных или определенных изображений, а вместо оценки фазы волнового фронта или оценки крутизны волнового фронта только на частях или участках измеренных или определенных изображений
Иными словами, типовое трехмерное распределение фазы волнового фронта или томография может быть получена по нескольким изображениям, например по более, чем двум изображениям, определенным в разных оптических плоскостях, например, по направлению оптического пути, для восстановления множества двумерных форм волнового фронта во множестве оптических плоскостей, определяющих трехмерное распределение фазы волнового фронта, и/или типовое трехмерное фазовое распределение волнового фронта или томография, которая может быть получена по множеству двумерных волновых фронтов, реконструированных из разных частей или участков измеренных или определенных изображений для заданной оптической плоскости.
Следовательно, изображения могут быть разделены на участки, где двумерная форма фронта волны реконструируется для каждого участка. Выражаясь точнее, двумерный волновой фронт(ы) или фазы волнового фронта могут быть восстановлены на участках плоскости, например на срединной плоскости, расположенной между участками различных оптических плоскостей, в которых измеряются или определяются изображения
Поскольку свет или световые лучи, исходящие или рассеивающиеся от различных частей и/или с различной глубины наблюдаемого объекта (либо свет, либо световые лучи, исходящие или рассеивающиеся от различных объектов), попадают на плоскость измеренных или определенных изображений под различными углами или в различных положениях, то есть могут формировать изображения в разных местах в оптической плоскости измеренных или определенных изображений, то различные области измеренных или определенных изображений могут связывать различные части или разную глубину наблюдаемого объекта (или части различных объектов).
Другими словами, путем вычисления или восстановления волновых фронтов или фаз волнового фронта для различных областей или частей измеренных или определенных изображений можно получить различные углы обзора для наблюдаемого объекта (объектов).
Иначе выражаясь, способ, описанный в данной заявке, может применяться к множеству различных частей или составных частей измеренных или определенных изображений для восстановления волновых фронтов, возникающих от различных частей или с различных глубин наблюдаемого объекта или от различных объектов среди частей различных объектов.
Исходя из этого, способ, описанный в данной заявке, может в качестве примера включать один, несколько или все из следующих этапов:
- измерение функции распределения интенсивности света по меньшей мере в двух разных участках по меньшей мере двух изображений в разных оптических плоскостях, имеющих разность оптических путей;
- при этом указанное измерение может включать определение множества одномерных кумулятивных функций распределения интенсивности света в каждом участке по интервалу различных углов в каждом участке;
- согласование определенных одномерных кумулятивных функций распределения различных участков из различных оптических плоскостей для получения двумерных оценок крутизны волнового фронта в участках плоскости, например в срединной плоскости, расположенной между указанными различными оптическими плоскостями;
- и интегрирование указанных оценок крутизны волнового фронта для восстановления двумерной формы волнового фронта (фронтов) в участках указанной плоскости, расположенных между упомянутыми различными оптическими плоскостями.
Для возможного типового распределения множества измеренных или определенных изображений и возможного множества выбранных фазовых экранов, которые, как предполагается, передают волновому фронту (фронтам) объекта (объектов) наблюдаемое изменение фазы, которое эквивалентно изменению фазы в пределах области или частей объекта, который он представляет, указанные возможные фазовые экраны могут быть вычислены по восстановленным или определенным фазам волнового фронта из упомянутого множества участков или областей, на которые можно разделить измеренные или определенные изображения.
При условии, что, например, что объект(ы) или целевая среда, наблюдение которых необходимо провести, являются по меньшей мере частично прозрачными, указанный объект(ы) или целевую среду можно моделировать как набор дискретных фазовых экранов, которые распределены вдоль оптической оси, например по оси z, причем указанный набор фазовых экранов может быть вычислен или восстановлен на основе множества участков или областей, на которые измеренные или определенные изображения могут быть разделены.
При этом фазовый экран может, помимо прочего, моделироваться комплексным выражением е-jϕ, где ϕ - двумерная фазовая карта для данного фазового экрана, a j - это мнимое число.
Если, например, волновой фронт, то есть электромагнитное поле U, проходит через фазовый экран, то результирующее поле или волновой фронт будет иметь профиль или форму U * e-jϕ.
С точки зрения вычислений, фазовый экран может быть смоделирован матрицей, в которой различные элементы матрицы представляют различные значения фазового сдвига. Как указано ранее, по меньшей мере частично прозрачный объект или целевой объем могут быть смоделированы как набор или стек фазовых экранов.
Поделив измеренные или определенные изображения на множество участков или областей, указанное множество участков или областей можно, например, понимать как фиксацию проекции (или линейный интеграл) указанного по меньшей мере частично прозрачного объекта или целевого объема под конкретным углом.
Таким образом, определенный участок или область измеренных или определенных изображений может соответствовать проекции (или линейному интегралу) фазовых экранов под определенным углом.
Иными словами, измеренные или определенные изображения модно разделить на множество участков или областей, которые могут отражать проекцию или линейный интеграл предполагаемого распределения фазовых экранов под определенным углом.
По этим проекциям на множество участков или областей измеренных или определенных изображений можно определить по меньшей мере одну систему уравнений, из которой определить неизвестные значения указанных матричных элементов фазовых экранов.
Например, и для простоты, пусть фазовый экран представляется следующей типовой матрицей с элементами x1, х2, х3, х4, представляющими различные значения фазового сдвига:
Учитывая следующие две проекции этой матрицы, например, при 0° и 90° градусов,
 и (c,d), с а, b, с, d, представляющие прогнозируемые значения изменения фазы, и в которых указанные проекции, например, захватываются двумя разными участками или областями измеренного или определенного изображения, могут быть сформулированы следующие уравнения или система уравнений.
и (c,d), с а, b, с, d, представляющие прогнозируемые значения изменения фазы, и в которых указанные проекции, например, захватываются двумя разными участками или областями измеренного или определенного изображения, могут быть сформулированы следующие уравнения или система уравнений.
Для проекции на 0° градусов::
x1+х2=a
х3+х4=b
Для проекции на 90° градусов:
x1+х3=с
х2+х4=d
Следовательно, по четырем уравнениям могут быть определены неизвестные значения x1, х2, х3, х4. Данный пример может быть обобщен на другие размерности или порядки матрицы.
Иными словами, путем восстановления фазовых экранов по решениям указанной системы (систем) уравнений можно выполнить фазовую томографию объекта или целевого объема, наблюдение которого необходимо произвести.
Следует также отметить, что после восстановления волнового фронта, то есть волнового фронта, расположенного между указанными различными оптическими плоскостями, исходя из которых получены изображения, указанный восстановленный волновой фронт может распространяться в соответствии с принципами дифракции Рэлея-Зоммерфельда.
Таким образом, интенсивности света в оптических плоскостях, которые не были захвачены, могут быть смоделированы, и оптическая система может, захватывая только два изображения, действовать как камера светового поля и томографический фазовый датчик.
Как указано выше, способ может быть реализован на компьютере, то есть компьютерная система может содержать по меньшей мере один процессор, который выполнен с возможностью реализации способа двумерного восстановления волновых фронтов, как описано в данной заявке.
Упомянутый по меньшей мере один процессорный блок может представлять собой, например, обычный компьютерный процессор (КП) или обычный графический процессор (ГП).
Так как способ относится к обработке изображений, например, изображений, которые могут быть захвачены, сохранены и обработаны как пиксельные изображения, то наиболее пригодными для реализации способа могут являться графические процессоры (ГП). Однако, что не менее важно, из-за того, что описанный в настоящей заявке способ более эффективен в вычислительном отношении, чем способы, известные в настоящее время, он также может быть легко реализован на обычных блоках компьютерного процессора (КП).
Например, время вычисления для представленного здесь способа может быть порядка мс или менее. В частности, например, было достигнуто время вычисления с помощью графического процессора 1,14 медля типового размера изображения 256×256 пикселей и 0,73 медля типового размера изображения 140×140 пикселей.
Описанный здесь способ может быть реализован в компьютерочитаемых инструкциях, которые могут храниться на одном или более компьютерочитаемых носителях или еще в одном компьютерочитаемом файле данных.
Изображения, которые составляют основу для описанной здесь двумерной реконструкции волновых фронтов в оптической плоскости, и которые дополнительно могут также обеспечивать томографию трехмерного распределения, то есть объемного распределения волновых фронтов, могут, например, быть захвачены детектором изображения, например камерой, содержащей прибор с зарядовой связью (ПЗС), например обычной двумерной цифровой камерой оптической системы, и/или с помощью специализированного датчика волнового фронта, содержащего камеру
Иными словами, типовая оптическая система может содержать по меньшей мере один детектор изображения и/или по меньшей мере один датчик волнового фронта, и оптическая система может быть выполнена с возможностью проведения реконструкции волнового фронта и/или для томографии трехмерного распределения, т.е. объемного распределения волновых фронтов, как описано в настоящей заявке, на основе данных по меньшей мере от одного детектора изображения и/или на основе данных по меньшей мере от одного датчика волнового фронта
В частности, можно допустить, что потенциально возможный датчик волнового фронта является датчиком кривизны, и/или в котором датчик волнового фронта содержит оптическую систему сбора данных, например, камеру, содержащую прибор с зарядовой связью (ПЗС), например, обычную двумерную цифровую камеру.
Ниже приведен пример измерения или оценки функции распределения, к примеру, двумерной функции распределения интенсивности света или распределения интенсивности света изображения, снятого в оптической плоскости оптической системы, задана с использованием типовой структуры.
Пусть ƒ(x,y) - двумерная дифференциальная функция распределения (ДФР), представляющая двумерное распределение интенсивности света, например, двумерное распределение интенсивностей света на изображении в плоскости xy, снятом, например, прибором с зарядовой связью (ПЗС), в котором изображение имеет, например, разрешение N×М, причем М, N представляют собой целые числа больше 1, т.е. в котором изображение имеет размер N×М пикселя.
Пусть V - преобразование, действующее на ƒ(x,y), и где преобразование V определяется как
V(p,t)[ƒ(x,y)]=CDF(ƒ(x,t+px)),
где CDF представляет кумулятивную функцию распределения ƒ по прямой линии наклона р и пересекает t вдоль изображения.
С помощью последующей замены наклона р на угол α, т.е.
р=tan(a),
преобразование V может быть выражено как:
V(α,t)[ƒ(x,y)]=CDF(f(x,t+х tan(α)))
Кроме того, можно обозначить через D(x)[a,b] метрику расстояния или функцию расстояния D для расстояния по оси х двух кривых а и b для одного и того же значения х. Здесь две кривые а и b могут пониматься как кумулятивные функции распределения CDF для линий, то есть линий под наклоном или под углами, и пересекаются вдоль изображения, как показано выше для преобразования V.
Функция D(x)[a,b] может использоваться для определения пространственного смещения измеренных позиций прихода фотонов или положений фотонов светового луча, а также измеренных локальных положений интенсивности световых лучей между двумя изображениями в разных оптических плоскостях, причем указанное пространственное смещение вызвано и зависит от аберраций волнового фронта. Иными словами, сравнение определенных положений фотонов световых лучей или измеренных локальных интенсивностей света на двух различных изображениях оптической системы с разностью оптических путей позволяет ограничить возникающую аберрацию волнового фронта и позволяет восстановить первоначальную форму волнового фронта.
Кроме того, предполагается, что в типовой оптической системе были захвачены два изображения I1, I2, то есть два различных распределения интенсивности света, в разных оптических плоскостях, имеющих разность оптических путей.
Для простоты далее предполагается, что оба изображения имеют одинаковое разрешение и, к примеру, имеют размер М × M пикселя. Однако описанный здесь способ также работает с изображениями, имеющими различные разрешения или различные размеры.
Для обоих изображений I1, I2 преобразование V может быть рассчитано для каждого значения t ∈ [-tan(α)M, М] и множества конкретных значений угла α.
Кроме того, все результирующие кривые V(α,t) могут быть нормализованы между 0 и М - 1.
Таким образом, первая производная по горизонтали для пикселя (х, y) в плоскости восстановления волнового фронта, расположенной между различными оптическими плоскостями изображений I1, I2,, может быть задана как:
δх(х,y)=cos(α)D(x)[V(α,y)[I1],V(α,y)[I2]]
а первая производная по вертикали для пикселя (х, y) в плоскости восстановления волнового фронта, расположенной между различными оптическими плоскостями изображений I1, I2, может быть задана как:
δy(х,y)=sin(α)D(x)[V(α,y)[I1],V(α,y)[I2]]
Использование линейной зависимости, полученной на основании геометрической оптики, между крутизной волнового фронта и смещением фотона, и использование эквивалентности указанных выше первых производных с локальными наклонами волнового фронта, то есть в пикселе (пикселях) (х, y) в плоскости восстановления волнового фронта, двумерный волновой фронт, подлежащий восстановлению в плоскости, расположенной между различными оптическими плоскостями изображений I2, I2,, может быть получен путем интегрирования δх(х,у)δy(х,y) вдоль х и y.
Указанное интегрирование полученных оценок крутизны волнового фронта δх(х,y)δy(х,y) для восстановления двумерной формы волнового фронта в оптической плоскости, расположенной между указанными различными оптическими плоскостями, может, помимо прочего, быть выполнено с использованием например, алгоритмов быстрого преобразования Фурье (БПФ), содержащих, например, один, несколько или все из следующих этапов:
- выполнение преобразования Фурье массива (массивов) (δх,δy) в пространство Фурье  ;
;
- преобразования Фурье уклона δx на u и умножение преобразования Фурье уклона δy на  ;
;
- сложение полученных массивов и деление результата на  , за исключением начала координат (и/или установка нуля в начало координат);
, за исключением начала координат (и/или установка нуля в начало координат);
- вычисление обратного преобразования Фурье, чтобы получить оценку восстановленного волнового фронта.
Однако могут быть применены и другие методы интегрирования.
Пример иллюстрируется следующими фигурами:
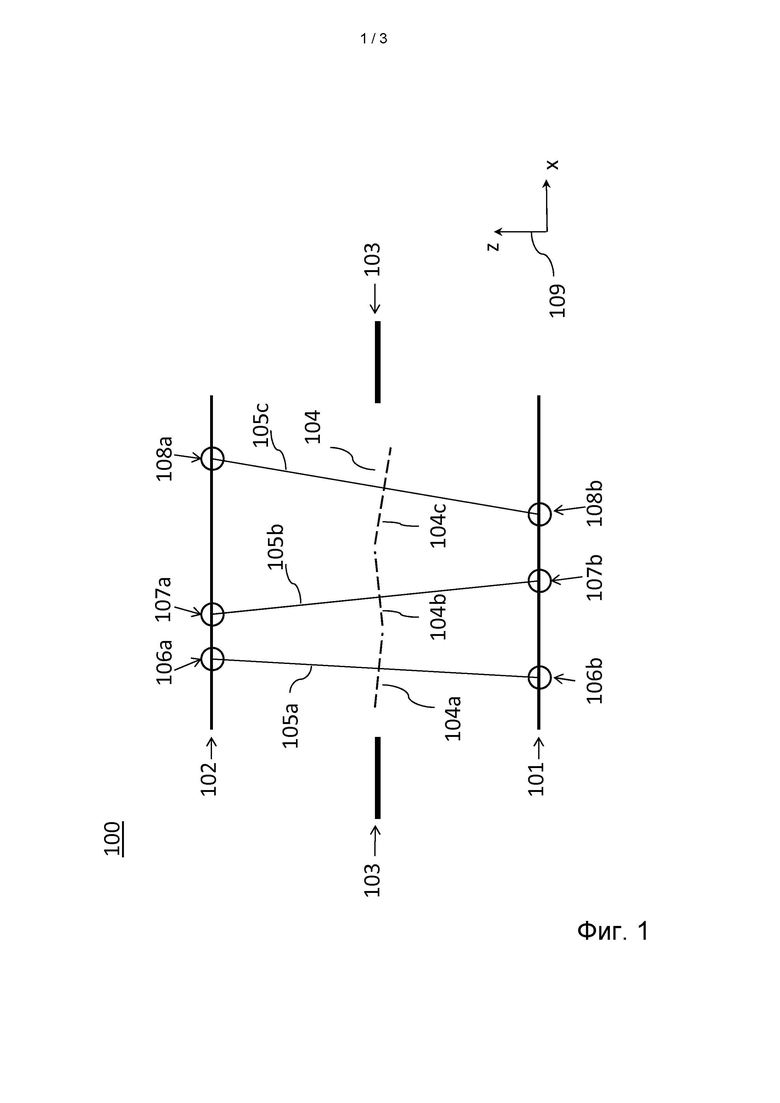
Фиг. 1: Пример оптической системы.
Фиг. 2: Пример графика точности измерения смещения луча.
Фиг. 3: Пример выполнения фазовой томографии волнового фронта.
Фиг. 1 показывает пример упрощенной оптической системы 100, иллюстрирующий соотношение между смещением типовых фотонов 106а, 106b, 107а, 107b, 108а, 108b и уклоном, то есть локальной крутизной волнового фронта 104 для упрощенного одномерного случая, когда все изменения волнового фронта и интенсивности происходят только в одном направлении, и для типового случая наличия трех обнаруженных фотонов, например, захваченных на изображении, в каждой оптической плоскости 101, 102, имеющей разность оптических путей, например, имеющей разность оптических путей вдоль оси z.
Таким образом, распределение типовых фотонов 106а, 106b, 107а, 107b, 108а, 108b в их соответствующих плоскостях 101, 102, может интерпретироваться как представление распределений интенсивности света, а оптические плоскости 101, 102 могут интерпретироваться как различные изображения, имеющие разность оптических путей.
Номер позиции 109 обозначает типовую ориентацию оптической системы, причем ось z идентична или параллельна оптической оси (не показана) оптической системы 100.
При условии, что, что фотоны 106а, 106b, 107а, 107b, 108а, 108b перемещаются по прямым линиям 105а, 105b, 105с между плоскостями изображения или оптическими плоскостями 102 и 101, и при условии, что направление распространения фотонов перпендикулярно их соответствующему локальному волновому фронту, смещение фотонов вдоль оси х определяется (локальным) уклоном волнового фронта, умноженному на расстояние между двумя оптическими плоскостями 101, 102.
Следовательно, локальные уклоны волнового фронта 104а, 104b, 104с волнового фронта 104 могут быть оценены или восстановлены в оптической плоскости 103 на полпути между положением фотонов или на полпути между оптическими плоскостями 102, 101, соответственно, путем согласования фотонов 106b, 107b, 108b одной плоскости 101 с фотонами 106а, 107а, 108 другой плоскости 102.
Оптические плоскости 102, 101, в которых измеряется распределение фотонов, то есть распределение интенсивности света, располагаться в любом месте вдоль оптического пути оптической системы 100. Вследствие чего, оптическая плоскость 103, в которой должен быть восстановлен волновой фронт, может быть также расположена в любом месте вдоль оптического пути оптической системы 100. Иными словами, оптическая плоскость 103, в которой восстанавливается волновой фронт, не обязательно должна совпадать с какой-либо конкретной оптической плоскостью, например, с плоскостью апертуры или с плоскостью зрачка оптической системы 100.
Как упоминалось выше, возможно, что изображения, полученные в различных оптических плоскостях, имеющих разность оптических путей, то есть изображения, в которых измеряется кумулятивная функция распределения интенсивности света, могут быть расположены как до, так и после плоскости апертуры или зрачка оптического система 100, так что оптическая плоскость 103, в которой должен быть восстановлен волновой фронт, также может быть расположена до или после плоскости апертуры или зрачка оптической системы 100
Поэтому возможно, что изображения, снятые в разных оптических плоскостях, имеющих разность оптических путей, то есть изображения, в которых измеряется кумулятивная функция распределения интенсивности света, могут быть расположены на различных расстояниях относительно возможной плоскости апертуры или плоскости зрачка.
Вышеописанный способ согласно изобретения теперь позволяет восстановить форму волнового фронта также для более сложного случая, в котором изменения волнового фронта и интенсивности происходят в двух измерениях и в различных направлениях.
Фиг. 2 в качестве примера показывает график 200, иллюстрирующий кривую погрешности 201 для погрешности 203 измерений смещения положения луча 202, то есть ошибки 203 измерения пространственного смещения или смещения 200 положений луча или пространственного смещения или смещения 202 измеренных координат локальной интенсивности света.
Как упомянуто выше, можно предположить, что соотношение между крутизной волнового фронта и пространственным смещением (смещениями) фотона или потока фотонов, распространяющегося перпендикулярно волновому фронту, находятся в линейной зависимости.
Чем достовернее может быть измерено смещение (смещения) положений лучей или измеренных локальных координат интенсивности света, тем достовернее может быть восстановлена первоначальная форма волнового фронта или фаза волнового фронта.
В качестве оценки достижимого разрешения волнового фронта можно задать
разрешение волнового фронта  ,
,
где
d представляет собой расстояние, то есть разность оптических путей, в метрах между двумя изображениями, к котором применяется представленный здесь способ, а
р представляет собой размер пикселя в объектном пространстве.
По вышеприведенному примеру оценки также представляется, что достижимое разрешение волнового фронта может увеличиваться для увеличения разности оптического пути, поскольку большее расстояние может увеличивать сдвиг (сдвиги) или смещение (смещения) для заданного угла оптического луча, например, для угла распространения оптического луча относительно оптической оси.
В показанной типовой модели ошибка для смещений или сдвигов менее 0,5 пикселя сравнительно мала, например менее 10%, подразумевая, что, например, при разности оптических путей в несколько сантиметров можно получить разрешение волнового фронта вплоть до пикометра.
Для полноты следует отметить, что минимальный измеряемый угол или крутизна волнового фронта, или фазовый фронт волнового фронта может быть оценен с помощью atan (р/d), где d представляет собой расстояние, то есть разность оптических путей, в метрах между двумя изображениями, к которым применяется представленный здесь способ, а р - размер пикселя в плоскости изображения или датчика изображения.
Фиг. 3 показывает пример упрощенной оптической системы 300 с оптической осью 315, иллюстрирующий возможную примерное выполнение оптической системы 300 для фазовой томографии с волновым фронтом на основе разделения на части или разбиения измеренных или определенных изображений 301, 302 в различных оптических плоскостях или в плоскостях измерений 316, 317, имеющих разность оптических путей.
Кроме того, типовая оптическая система 300 содержит дополнительный оптический элемент 304, например, линзу, которая может, к примеру, фокусировать световые лучи или пучки 309, 310 световых лучей, распространяющиеся от типовых наблюдаемых объектов 307, 308 на типовую фокальную плоскость 303. Указанные типовые объекты 307, 308 могут быть либо двумя отдельными объектами (как показано), расположенными на различных расстояниях от оптической оси 315, либо они могут являться разными частями одного объекта.
Как показано в качестве примера, световые лучи или пучки 309, 310 световых лучей могут попадать на типовые оптические плоскости 316, 317 в различных местах на каждой плоскости 309, 310, то есть в различных местах измеренных или определенных изображений 301, 303.
Как описано выше, измеренные или определенные изображения 301, 303 могут быть отделены, или разбиты, или разделены на части, там, где части или участки могут перекрываться или быть отделены. Например, изображение 301 может быть разделено на две области 311, 314, а изображение 312 может быть разделено на две области 312, 313
Возможны и другие схемы разбиения. Показанное здесь простое разбиение является чисто иллюстративным. Как показано в качестве примера, лучи света объекта 307 попадают в изображение 301 в области 311 оптической плоскости 316 и попадают в изображение 302 в области 312 оптической плоскости 317, тогда как лучи света объекта 308 попадают в изображение 302 в область 314 оптической плоскости 316 и попадают в изображение 302 в область 313 оптической плоскости 317
Взамен использования описанного здесь способа двумерного восстановления волновых фронтов или фаз волнового фронта ко всему размеру изображений 301, 302 или ко всему размеру датчика изображения, например, прибора с зарядовой связью (ПЗС), - способ восстановления фронта (фронтов) волны или фазы (фаз) волнового фронта может быть применен только к участкам или областям, на которые каждое изображение 301, 302 или плоскость 316, 317 измерения или датчик изображения (не показан) разделены.
Другими словами, фаза волнового фронта восстанавливается не по всему изображению 301, 302, а фаза (фазы) волнового фронта для каждого участка 311, 314, 312, 313 или для области каждого изображения 301, 302 восстанавливается.
Выражаясь точнее, формы волнового фронта или фазы волнового фронта участков в плоскости, расположенной между соответствующими участками 311, 314, 312, 313 или областями изображений 301, 302, то есть между оптическими плоскостями 316, 316, могут быть восстановлены.
При наличии, например, по меньшей мере частично прозрачного объекта или целевого объема 318 среды, указанный по меньшей мере частично прозрачный объект или целевой объем 318 среды может быть смоделирован как набор различных дискретных фазовых экранов 305, 306, в которых фазовый экран, как указано выше, может моделироваться матрицей, в которой различные элементы матрицы представляют различные значения изменения фазы для изменений фазы, сообщаемых волновому фронту, распространяющемуся через указанный по меньшей мере частично прозрачный объект или целевой объем 318 среды различными областями объекта или целевого объема среды.
С помощью разбивки измеренных или определенных изображений 301, 302 на множество участков или областей 311, 314, 312, 313, указанное множество участков или областей можно, например, понимать как захват проекции (или линейного интеграла) указанного по меньшей мере частично прозрачного объекта или целевого объема 318 среды под конкретным углом.
Следовательно, определенный участок или область 311, 314, 312, 313 измеренных или определенных изображений 301, 302 могут соответствовать проекции (или линейному интегралу) фазового экрана 305, 306 под определенным углом.
Разделение измеренных или определенных изображений 301, 302 на множество участков или областей 311, 314, 312, 313 может затем, как указано выше, формировать основу для определения системы уравнений, по которой можно вычислить или восстановить множество фазовых экранов 305, 306.
Затем набор вычисленных или восстановленных фазовых экранов 305, 306 может, помимо прочего, позволить производить фазовую томографию с волновым фронтом, например, по меньшей мере частично прозрачного объекта (объектов) или целевой среды 318, наблюдение которых необходимо произвести, для различных частей объекта или для различных объектов под разными углами обзора и/или на разной глубине.
Далее следуют три листа, содержащие фиг. 1, фиг. 2 и фиг. 3, причем позиционные обозначения означают следующие компоненты:
100 пример оптической системы
101 типовая (первая) плоскость изображения или (первая) оптическая плоскость в (первом) положении оптического пути, имеющего (первое) распределение интенсивности света
102 типовая (вторая) плоскость изображения или (вторая) оптическая плоскость во (втором) положении оптического пути, имеющего (второе) распределение интенсивности света
103 типовая оптическая плоскость между указанными первой и второй оптическими плоскостями, в которой восстанавливается волновой фронт, например плоскость апертуры оптической системы
104 типовой волновой фронт, подлежащий восстановлению 104а типовой локальный участок волнового фронта, имеющий (первый) локальный уклон
104b типовой локальный участок волнового фронта, имеющий (второй) локальный уклон
104 с типовой локальный участок волнового фронта, имеющий (третий) локальный уклон
105а примерная траектория распространения фотонов/ направление распространения фотонов/ директория распространения локального волнового фронта
105b примерная траектория распространения фотонов/ направление распространения фотонов/ директория распространения локального волнового фронта
105с примерная траектория распространения фотонов/ направление распространения фотонов/ директория распространения локального волнового фронта
106а типовой фотон, представляющий локальную интенсивность света в оптической
плоскости 102
106b типовой фотон, представляющий локальную интенсивность света в оптической
плоскости 101
107а типовой фотон, представляющий локальную интенсивность света в оптической
плоскости 102
107b типовой фотон, представляющий локальную интенсивность света в оптической
плоскости 101
108а типовой фотон, представляющий локальную интенсивность света в оптической
плоскости 102
108b типовой фотон, представляющий локальную интенсивность света в оптической
плоскости 101
109 типовая ориентация оптической системы, причем ось z идентична или параллельна
оптической оси (не показана) оптической системы
200 типовой график погрешности измерений смещения луча
201 типовая кривая погрешности
202 типовая ось абсцисс, например ось Y, например, сдвиг луча в пикселях
203 типовая ось ординат, например ось X, например погрешность измерения смещения луча по нормированной шкале от 0 до 11
300 пример оптической системы
301 типовое (первое) изображение в (первом) положении оптического пути
302 типовое (второе) изображение в (втором) положении оптического пути
303 типовая возможная фокальная плоскость
304 типовой оптический элемент, например, линза оптической системы
305 типовой (первый) фазовый экран
306 типовой (второй) фазовый экран
307 типовой (первый) объект наблюдения
308 типовой (второй) объект наблюдения
309 пример световых лучей (пучка световых лучей), исходящих от (первого) объекта
310 пример световых лучей (пучка световых лучей), исходящих от (второго) объекта
311 типовой (первый) участок или область (первого) изображения 301
312 типовой (первый) участок или область (второго) изображения 302
313 типовой (второй) участок или область (второго) изображения 302
314 типовой (второй) участок или область (первого) изображения 301
315 типовая оптическая ось
316 типовая (первая) оптическая плоскость или (первая) плоскость измерения
317 типовая (вторая) оптическая плоскость или (вторая) плоскость измерения
318 типовой по меньшей мере частично прозрачный целевой объем (среды)
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ СПЕКЛ-МОДУЛЯЦИИ ПРИ ИЗМЕРЕНИИ АБЕРРАЦИЙ ГЛАЗА ЛАЗЕРНЫМ АБЕРРОМЕТРОМ И ЛАЗЕРНЫЙ АБЕРРОМЕТР | 2009 |
|
RU2425621C2 |
| СПОСОБ И КАМЕРА ДЛЯ ПОЛУЧЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ ИЗ ТРЕХМЕРНЫХ ОБЪЕКТОВ СЪЕМКИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2009 |
|
RU2502104C2 |
| Способ измерения пространственного распределения внутренних неоднородностей объекта | 1981 |
|
SU999808A1 |
| Система формирования широкополосного гиперспектрального изображения на основе сжатого зондирования с нерегулярной дифракционной решеткой | 2014 |
|
RU2653772C1 |
| СПОСОБ ВЫЧИСЛЕНИЯ ГОЛОГРАММЫ | 2005 |
|
RU2393518C2 |
| СИСТЕМА МИКРОСКОПИИ С ОСЛАБЛЕНИЕМ СТИМУЛИРОВАННОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2550575C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ МНОГОРАКУРСНОГО ТРЕХМЕРНОГО (3D) ИЗОБРАЖЕНИЯ ПРОЕКЦИОННОГО ТИПА | 2023 |
|
RU2817180C1 |
| Способ пространственного анализа светового потока | 1988 |
|
SU1550470A1 |
| Способ определения координат изменения структуры клетки по фазовым изображениям | 2021 |
|
RU2761480C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБРАЗЦА | 2014 |
|
RU2662461C2 |


Изобретение относится к средствам для восстановления волнового фронта в оптической системе. Способ двумерного восстановления волновых фронтов (104) света для использования в оптической системе (100) включает измерение функции распределения интенсивности света по меньшей мере в двух изображениях в разных оптических плоскостях (101, 102), имеющих разность оптических путей, где указанное измерение включает: определение множества одномерных кумулятивных функций распределения интенсивности света в каждой плоскости (101, 102) по интервалу различных углов в каждой плоскости, согласование определенных одномерных кумулятивных функций распределения различных оптических плоскостей для получения двумерных оценок крутизны волнового фронта в плоскости (103), расположенной между указанными различными оптическими плоскостями, интегрирование указанных оценок крутизны волнового фронта для восстановления двумерной формы волнового фронта (104) в указанной плоскости (103), расположенной между указанными различными оптическими плоскостями. Изобретение обеспечивает упрощение и ускорение восстановления исходного волнового фронта. 4 н. и 10 з.п. ф-лы, 3 ил.
1. Способ двумерного восстановления волновых фронтов (104) света для использования в оптической системе (100), включающий:
измерение функции распределения интенсивности света по меньшей мере в двух изображениях в разных оптических плоскостях (101, 102), имеющих разность оптических путей, причем указанное измерение включает:
определение множества одномерных кумулятивных функций распределения интенсивности света в каждой плоскости (101, 102) по интервалу различных углов в каждой плоскости,
согласование определенных одномерных кумулятивных функций распределения различных оптических плоскостей для получения двумерных оценок крутизны волнового фронта в плоскости (103), расположенной между указанными различными оптическими плоскостями,
интегрирование указанных оценок крутизны волнового фронта для восстановления двумерной формы волнового фронта (104) в указанной плоскости (103), расположенной между указанными различными оптическими плоскостями.
2. Способ по п. 1, в котором плоскость (103), расположенная между указанными различными оптическими плоскостями, представляет собой срединную плоскость.
3. Способ по любому из предыдущих пунктов, в котором одно из указанных по меньшей мере двух изображений представляет собой рассчитанное изображение, которое полностью характеризуется теоретическими и/или эмпирическими моделями.
4. Способ по любому из предыдущих пунктов, в котором одно из указанных по меньшей мере двух изображений берут в плоскости зрачка оптической системы.
5. Способ по любому из предыдущих пунктов, в котором одно изображение берут с внутренней стороны относительно фокуса, и одно изображение берут с внешней стороны относительно фокуса.
6. Способ по любому из предыдущих пунктов, в котором множество изображений, то есть более двух изображений, берут в разных оптических плоскостях для восстановления множества двумерных форм волнового фронта во множестве оптических плоскостей.
7. Способ по любому из предыдущих пунктов, в котором изображения разделяют на участки, и восстанавливают двумерную форму волнового фронта для каждого участка.
8. Способ по любому из предыдущих пунктов, в котором распространение восстановленного волнового фронта проходит согласно дифракции Рэлея-Зоммерфельда.
9. Компьютерная система, содержащая по меньшей мере один процессорный блок, выполненный с возможностью осуществления способа двумерного восстановления волновых фронтов по одному из предыдущих пунктов.
10. Компьютерная система по п. 9, в которой указанный по меньшей мере один процессорный блок представляет собой графический процессорный блок.
11. Компьютерочитаемый носитель для хранения, на котором сохранены инструкции, которые при их исполнении одним или более процессорами обеспечивают выполнение этими одним или более процессорами способа по любому из пп. 1-8.
12. Оптическая система, содержащая по меньшей мере один детектор изображения, например двумерную цифровую камеру, и выполненная с возможностью восстановления волнового фронта по любому из пп. 1-8 на основе данных от указанного по меньшей мере одного детектора изображения и/или с возможностью выполнения томографии трехмерного распределения, то есть объемного распределения, волновых фронтов на основе данных от указанного по меньшей мере одного детектора изображения.
13. Оптическая система по предшествующему пункту, дополнительно содержащая по меньшей мере один датчик волнового фронта,
при этом оптическая система дополнительно выполнена с возможностью восстановления волнового фронта на основе данных от указанного по меньшей мере одного датчика волнового фронта и/или с возможностью выполнения томографии трехмерного распределения, то есть объемного распределения, волновых фронтов на основе данных от указанного по меньшей мере одного датчика волнового фронта.
14. Оптическая система по предшествующему пункту, в которой датчик волнового фронта представляет собой датчик кривизны, и/или датчик волнового фронта содержит оптическую систему для сбора данных.
| MARCOS A | |||
| VAN DAM ET AL, "Wave-front sensing from defocused images by use of wave-front slopes", APPLIED OPTICS,Vol | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| S | |||
| Pal, A | |||
| Lambert and S | |||
| J | |||
| Weddell, "Practical application of the geometric wavefront sensor for adaptive optics," 2016 International Conference on Image and Vision Computing New | |||

