ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Приоритет настоящей заявки заявляется по китайской патентной заявке №201710434182.7, озаглавленной «СТРАТЕГИЯ УПРАВЛЕНИЯ МЕХАНИЗМОМ БЕССТУПЕНЧАТОГО ПОДЪЕМА КЛАПАНОВ», поданной 9 июня 2017 года компанией «Great Wall Motors Ltd».
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу управления механизмом бесступенчатого подъема клапанов, устройству и энергонезависимому машиночитаемому носителю информации.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
По мере роста серьезных проблем окружающей среды, обязательными условиями продвижения двигателя на рынке продаж становятся низкий уровень выбросов и защита окружающей среды. Нагрузка на обычный бензиновый двигатель изменяется в результате изменения положения дроссельной заслонки для регулирования впуска воздуха. В условиях небольшой нагрузки дроссельная заслонка открыта незначительно, имеет место довольно высокая степень вакуума позади указанной заслонки, и велики насосные потери в процессе наполнения цилиндров двигателя, а это является веской причиной того, что бензиновый двигатель работает менее эффективно по сравнению с дизельным двигателем. Для повышения эффективности двигателя предложен способ бесступенчатого подъема клапанов. Неизбежным фактом является то, что в существующем уровне техники на согласованность подъемных перемещений клапанов негативно влияют допуски, предъявляемые к машинной обработке компонентов и деталей системы. Более того, вследствие зазора в системе, образуемого при посадке деталей, и деформации каждого из компонентов и деталей, образуется разность в высоте подъема, так что имеет место некоторое отклонение между практической и планируемой эффективностью технологии бесступенчатого подъема клапанов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В свете указанного, согласно первому аспекту настоящей заявки предложен способ управления механизмом бесступенчатого подъема клапанов для улучшения низкотемпературного запуска.
Для достижения вышеуказанной цели в настоящей заявке предложено следующее техническое решение.
Предложен способ управления механизмом бесступенчатого подъема клапанов, причем два клапана механизма бесступенчатого подъема клапанов одного и того же цилиндра соответствуют эксцентриковым колесам, имеющим разные профили, при этом указанный способ включает: после подачи питания к двигателю, самообучение механизма бесступенчатого подъема клапанов для определения текущего положения; если самообучение выполнено успешно, механизм бесступенчатого подъема клапанов располагают в положении максимального подъема, подготавливая к запуску двигателя, и на основании исходной температуры определяют режим регулирования, причем в момент запуска при нормальной температуре регулировку выполняют от положения максимального подъема до положения минимального подъема, а в момент запуска при низкой температуре регулировку выполняют от положения максимального подъема до положения, в котором два клапана одного и того же цилиндра имеют максимальную разность по высоте подъема; если самообучение выполнено неудачно, вводят режим предварительного запуска; вводят режим управления CVVL на основании режима работы двигателя; и выключают двигатель.
Далее, этап, на котором механизм бесступенчатого подъема клапанов начинает самообучение для определения текущего положения, включает отправку блоком управления команды для перемещения из исходного положения в положение минимального подъема, а затем в положение максимального подъема.
Далее, механизм бесступенчатого подъема клапанов выполнен таким образом, что в положении максимального подъема направление результирующей силы роликового узла указанного механизма, действующей на эксцентриковое колесо, проходит через ось эксцентрикового вала, обеспечивая самоблокировку механизма бесступенчатого подъема клапанов в положении максимального подъема после успешного выполнения этапа самообучения.
Далее, режим предварительного запуска включает определение положения эксцентрикового вала; вычисление блоком управления текущего значения высоты подъема; и запуск двигателя совместно с открытием дроссельной заслонки, соответствующим значению высоты подъема.
Далее, режим предварительного запуска дополнительно включает самообучение максимальной высоты подъема, выполняемое механизмом бесступенчатого подъема клапанов после запуска двигателя.
Далее, этап введения режима управления CVVL на основании режима работы двигателя включает выполняемое в условиях разгона увеличение высоты подъема; выполняемое в условиях снижения скорости и с учетом нагрузки регулирование высоты подъема до положения минимальной высоты, соответствующего текущей нагрузке; выполняемое в условиях торможения регулирование высоты подъема до максимального значения и закрытие дроссельной заслонки; и выполняемое в условиях холостого хода регулирование высоты подъема до минимального значения.
Далее, в условиях разгона высота подъема увеличивается до положения, близкого к 90% от максимального значения высоты подъема, а затем постепенно регулируется до положения, близкого к максимальному значению подъема.
Далее, после этапа выключения двигателя, способ управления дополнительно включает следующие этапы: до того, как двигатель заглохнет, механизм бесступенчатого подъема клапанов определяет положение минимального подъема; после выключения двигателя механизм бесступенчатого подъема клапанов определяет положение максимального подъема; и при достижении максимального подъема самоблокирование механизма бесступенчатого подъема клапанов.
По сравнению с известным уровнем техники, способ управления механизмом бесступенчатого подъема клапанов в соответствии с настоящей заявкой имеет описанные ниже преимущества.
1) При использовании способа управления механизмом бесступенчатого подъема клапанов согласно вариантам выполнения настоящего изобретения, с помощью регулирования разности высот подъема клапанов одного и того же цилиндра до максимального значения, два воздушных потока, протекающих с разной скоростью, поступают в камеру сгорания, образуя завихрение, которое способствует быстрому и надлежащему смешиванию топливного газа, обеспечивая существенное улучшение эффективности низкотемпературного запуска. Более того, с улучшением асинхронных подъемов двух клапанов одного и того же цилиндра в процессе горения, сгорание в условиях средней или малой нагрузки становится более эффективным.
Согласно второму аспекту, в настоящей заявке предложено устройство, содержащее один или более процессоров, запоминающее устройство и одну или более программ, хранящихся в запоминающем устройстве. При исполнении указанными одним или более процессорами, указанная одна или более программ обеспечивает выполнение вышеуказанной способа управления механизмом бесступенчатого подъема клапанов согласно настоящей заявке.
Согласно третьему аспекту, в настоящей заявке предложен энергонезависимый машиночитаемый носитель информации, хранящий одну или более программ, и при исполнении одним устройством, указанная одна или более программ обеспечивает выполнение вышеупомянутым устройством согласно настоящей заявке способа управления механизмом бесступенчатого подъема клапанов в соответствии с настоящей заявкой.
Технические эффекты, обеспечиваемые устройством и энергонезависимым машиночитаемым носителем информации, такие же, что и технические эффекты, обеспечиваемые способом управления механизмом бесступенчатого подъема клапанов согласно настоящей заявке, и поэтому в данном документе они повторно описаны не будут.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, составляющие часть настоящей заявки, способствуют ее всестороннему пониманию, а для интерпретации настоящего изобретения используют примеры вариантов выполнения и их толкование без ограничений неправомерным образом. На чертежах:
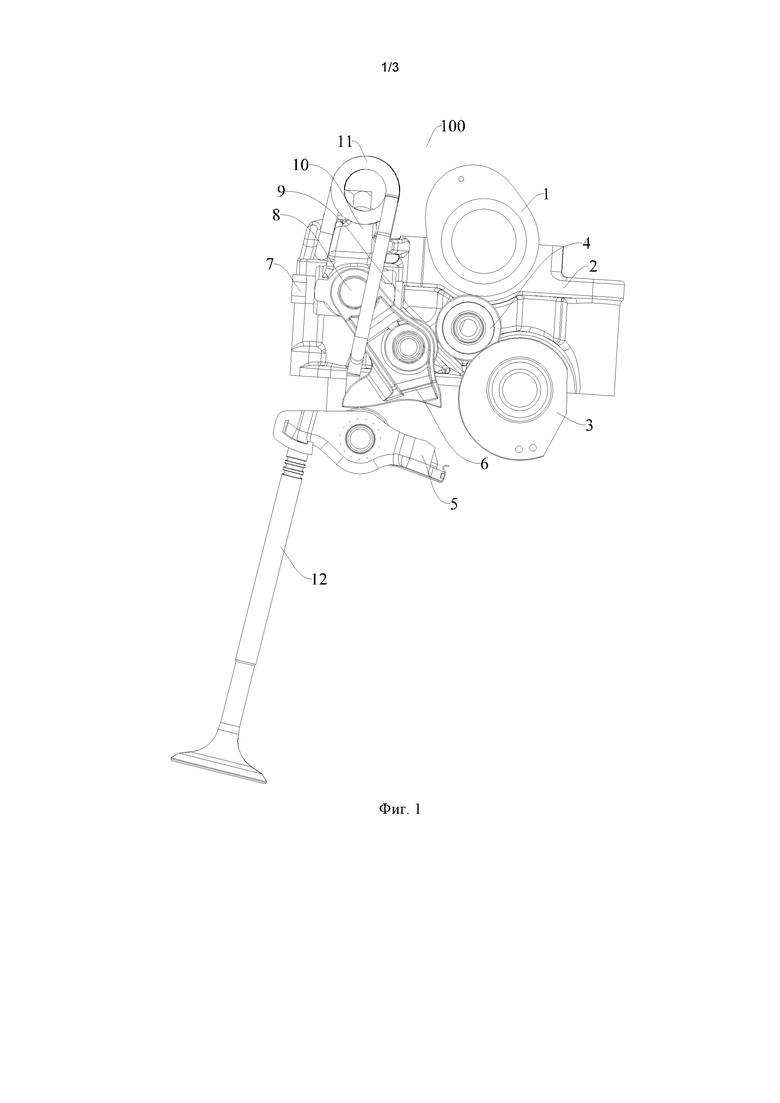
на Фиг. 1 представлен схематический вид механизма бесступенчатого подъема клапанов, согласно варианту выполнения настоящего изобретения;
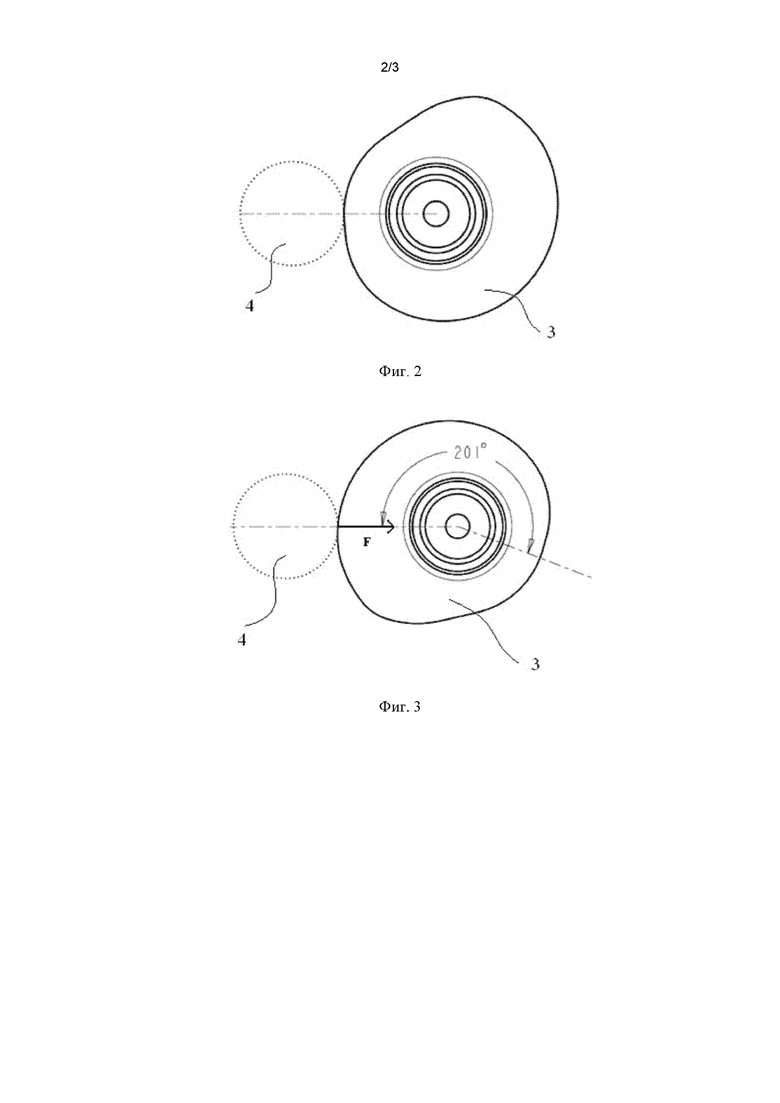
на Фиг. 2 представлен схематический вид эксцентрикового вала в положении минимального подъема, согласно варианту выполнения настоящего изобретения;
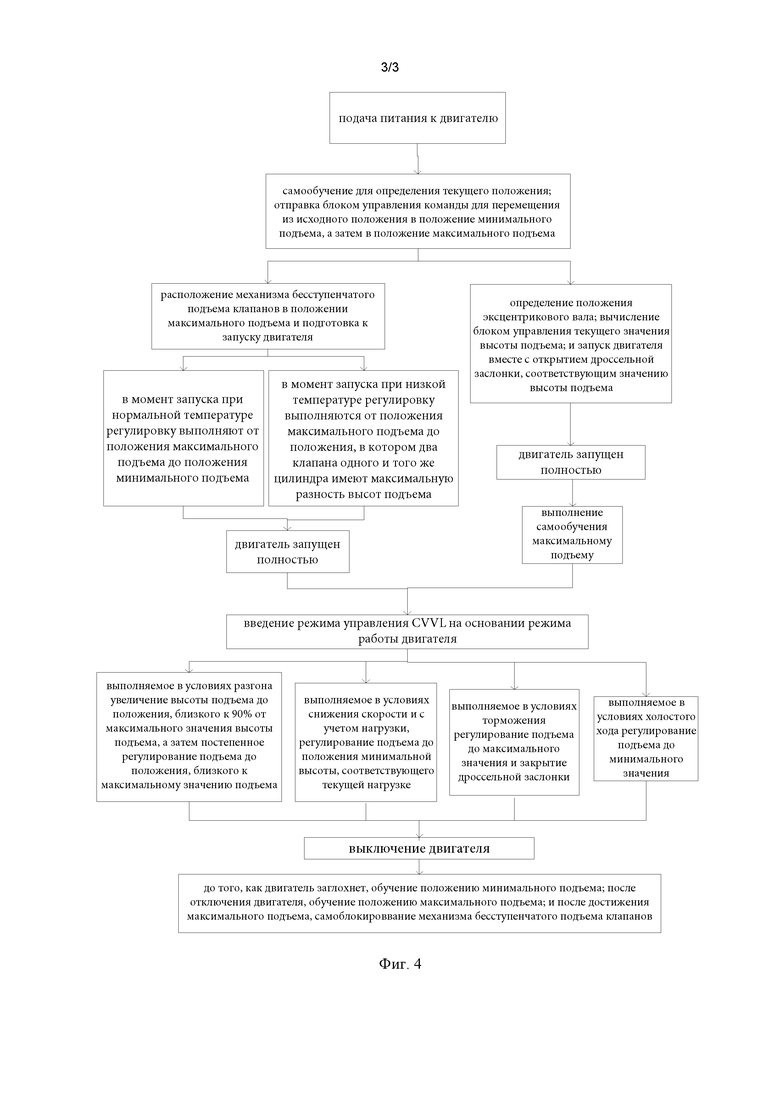
на Фиг. 3 представлен схематический вид эксцентрикового вала в положении максимального подъема, согласно варианту выполнения настоящего изобретения; и
на Фиг. 4 представлена блок-схема способа управления согласно варианту выполнения настоящего изобретения.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Механизм 100 бесступенчатого подъема клапанов; распределительный вал 1; опорное основание 2; эксцентриковый вал 3; роликовый узел 4; роликовое коромысло 5; промежуточный качающийся рычаг 6; наружный регулировочный винт 7; фиксатор 8 промежуточного качающегося рычага; внутренний регулировочный винт 9; неподвижная опора 10; возвратная пружина 11; клапан 12; позиционирующая втулка 13; позиционирующий штифт 14; малая крышка 15 распределительного вала; головка 16 цилиндра.
ПОДРОБНОЕ ОПИСАНИЕ
Следует отметить, что варианты выполнения в настоящей заявке и их характерные особенности можно сочетать, если они не противоречат друг другу.
Далее настоящее изобретение описано подробно со ссылкой на чертежи, иллюстрирующие варианты выполнения.
Как изображено на Фиг. 1, механизм 100 бесступенчатого подъема клапанов может включать распределительный вал 1, опорное основание 2, эксцентриковый вал 3, роликовый узел 4, роликовое коромысло 5, промежуточный качающийся рычаг 6, наружный регулировочный винт 7, фиксатор 8 промежуточного качающегося рычага, внутренний регулировочный винт 9, неподвижную опору 10, возвратную пружину 11, клапан 12, позиционирующую втулку 13, позиционирующий штифт 14, малую крышку 15 распределительного вала, головку 16 цилиндра и устройство для приведения в действие эксцентрикового вала.
Распределительный вал 1, эксцентриковый вал 3 и неподвижная опора 10 установлены на опорном основании 2, при этом распределительный вал 1 и эксцентриковый вал 3 могут свободно вращаться, а опорное основание 2 установлено на головке 16 цилиндра.
Распределительный вал 1 соединен с коленчатым валом двигателя, например, посредством цепной передачи. Распределительный вал 1 вращается, приводя в действие роликовый узел 4, при этом ролик промежуточного качающегося рычага 6 приводится в плотный контакт с роликовым узлом 4 посредством возвратной пружины 11, и роликовый узел 4 передает движение промежуточному качающемуся рычагу 6, который приводит в действие роликовое коромысло 5, тем самым, открывая или закрывая клапан 12.
Устройство для приведения в действие эксцентрикового вала динамически связано с эксцентриковым валом с обеспечением возможности управления указанным валом 3 для обеспечения его вращения по часовой стрелке или против часовой стрелки. Устройство для приведения в действие эксцентрикового вала может быть выполнено в виде управляющего электродвигателя, и выходной вал данного двигателя может быть выполнен в виде червячного винта. Эксцентриковый вал 3 может быть жестко соединен с червячной передачей, а червячный винт взаимодействует с червячной передачей с обеспечением динамического соединения управляющего электродвигателя с эксцентриковым валом 3.
Эксцентриковый вал 3 жестко соединен с эксцентриковым колесом, и при вращении эксцентрикового вала 3 эксцентриковое колесо данного вала 3 приводит в действие роликовый узел 4, изменяя место контакта между данным узлом 4 и роликом промежуточного качающегося рычага 6, тем самым, регулируя продолжительность подъема и открытия клапана.
Промежуточный качающийся рычаг 6 установлен на неподвижной опоре 10 посредством фиксатора 8 промежуточного качающегося рычага, при этом положение указанного фиксатора 8 может быть постоянным или регулируемым посредством наружного регулировочного винта 7 и внутреннего регулировочного винта 9, и изменено путем поворота указанного винта 7 или 9, тем самым, обеспечивая регулировку центра вращения промежуточного качающегося рычага 6. Два промежуточных качающихся рычага 6 могут быть установлены каждый на неподвижной опоре 10, а указанная опора установлена на опорном основании 2.
Далее описан способ управления механизмом 100 бесступенчатого подъема клапанов согласно варианту выполнения настоящего изобретения.
Два клапана 12 механизма 100 бесступенчатого подъема клапанов для одного и того же цилиндра соответствуют эксцентриковым колесам, имеющим разные профили. То есть, два клапана 12 одного и того же цилиндра могут иметь подъемы, которые не являются абсолютно синхронными.
Как изображено на Фиг. 4, способ управления включает: после подачи питания к двигателю, самообучение механизма 100 бесступенчатого подъема клапанов для определения текущего положения. Этап, на котором механизм 100 бесступенчатого подъема клапанов начинает самообучение для определения текущего положения, включает: отправку блоком управления команды для перемещения управляющего электродвигателя из исходного положения в положение минимального подъема, а затем в положение максимального подъема. При этом, блок управления может обеспечить вычисление текущего положения эксцентрикового вала 3 на основании работы датчика высоты подъема (позиционный датчик электродвигателя).
Если самообучение выполнено успешно, механизм 100 бесступенчатого подъема клапанов расположен в положении максимального подъема и готов к запуску двигателя. В частности, как изображено на Фиг. 3, механизм 100 бесступенчатого подъема клапанов выполнен таким образом, что в положении максимального подъема направление результирующей силы F роликового узла указанного механизма, действующей на эксцентриковое колесо, проходит через ось эксцентрикового вала 3, обеспечивая самоблокировку механизма 100 в положении максимального подъема после успешного самообучения. В положении максимального подъема, для профиля эксцентрикового колеса угол зацепления превышает угол трения, и направление результирующей силы роликового узла указанного механизма, действующей на эксцентриковое колесо, проходит через ось эксцентрикового вала 3, таким образом, эксцентриковое колесо и роликовый узел самоблокируются.
В этот момент, режим регулирования эксцентрикового вала 3 может быть определен на основании исходной температуры. В момент запуска при нормальной температуре регулировку управляющего электродвигателя выполняют от положения максимального подъема до положения минимального подъема, а в момент запуска при низкой температуре управляющий электродвигатель регулируется от положения максимального подъема до положения, в котором два клапана одного и того же цилиндра имеют максимальную разность высот подъема.
Понятно, что когда разность высот подъема клапанов одного и того же цилиндра имеет максимальное значение, два воздушных потока, протекающих с разной скоростью, поступают в камеру сгорания, образуя завихрение, которое способствует быстрому и соответствующему смешиванию топливного газа, обеспечивая существенное улучшение эффективности низкотемпературного запуска. Более того, при улучшении асинхронных подъемов двух клапанов одного и того же цилиндра в процессе горения, сгорание в условиях средней или малой нагрузки становится более эффективным.
Если самообучение выполнено неудачно, вводится режим предварительного запуска.
В частности, режим предварительного запуска включает: обнаружение положения эксцентрикового вала 3; вычисление блоком управления текущего значения высоты подъема; и запуск двигателя совместно с открытием дроссельной заслонки, соответствующим значению высоты подъема. Режим предварительного запуска дополнительно включает: после запуска двигателя, механизм 100 бесступенчатого подъема клапанов выполняет самообучение максимальной высоте подъема.
В этом случае, даже если самообучение выполнено неудачно, это не влияет на пуск двигателя, и с помощью саморегулирования, механизм 100 бесступенчатого подъема клапанов может нормально работать после запуска двигателя.
Если самообучение выполнено успешно, после полного запуска двигателя вводится режим управления CVVL на основании режима работы двигателя, а если самообучение выполнено неудачно, то после того, как механизм 100 бесступенчатого подъема клапанов выполнит самообучение максимальному подъему, вводится режим управления CVVL на основании режима работы двигателя.
В частности, этап введения режима управления CVVL на основании режима работы двигателя включает: при условии разгона, увеличение высоты подъема (например, в условиях разгона высота подъема увеличивается до положения, близкого к 90% от максимального значения высоты подъема, а затем постепенно регулируется до положения, близкого к максимальному значению подъема, при этом подъем быстро увеличивается до положения, примерно равного 90% от максимального значения высоты подъема на ранней стадии, и мягко регулируется до положения, близкого к максимальному подъему для предотвращения удара); при условии снижения скорости и с учетом нагрузки, регулирование высоты подъема до положения минимального подъема, соответствующего текущей нагрузке; при условии торможения, регулирование подъема до максимального значения и закрытие дроссельной заслонки; и в условиях холостого хода регулирование высоты подъема до минимального значения. Двигатель отключают.
После этапа отключения двигателя, способ управления может дополнительно включать: до того, как двигатель заглохнет, определение механизмом 100 бесступенчатого подъема клапанов положения минимального подъема; после выключения двигателя определение механизмом 100 бесступенчатого подъема клапанов положения максимального подъема; и после достижения максимального подъема, самоблокирование механизма 100 бесступенчатого подъема клапанов для содействия следующему запуску.
В заключении следует сказать, что согласно способу управления механизмом 100 бесступенчатого подъема клапанов определяют значение подъема клапана каждого цилиндра и обеспечивают обратную связь с помощью датчика подъема, регулируют подъем клапана, учитывая разные текущие режимы работы двигателя, такие как запуск, разгон, замедление хода, торможение, холостой ход или т.п., с обеспечением непрерывного изменения высоты подъема клапана в большинстве рабочих режимов двигателя и гарантировании оптимальной согласованности подъема клапанов. В частности, может быть обеспечено существенное улучшение низкотемпературного запуска.
Далее описано устройство согласно настоящей заявке.
Устройство содержит один или более процессоров, запоминающее устройство и одну или более программ, хранящихся в запоминающем устройстве. При исполнении указанным одним или более процессором, указанная одна или более программ обеспечивает выполнение вышеописанного способа управления механизмом 100 бесступенчатого подъема клапанов, выполненного согласно любому из вариантов выполнения настоящего изобретения.
Технические эффекты, обеспечиваемые предложенным устройством, такие же, что и технические эффекты, обеспечиваемые предложенным способом управления механизмом 100 бесступенчатого подъема клапанов, и в данном документе их повторное описание не приводится.
Далее описан энергонезависимый машиночитаемый носитель информации, выполненный в соответствии с настоящей заявкой.
Энергонезависимый машиночитаемый носитель информации хранит одну или более программ. При исполнении одним устройством, указанная одна или более программ обеспечивает выполнение устройством, выполненным в соответствии с настоящей заявкой, вышеописанного способа управления механизмом 100 бесступенчатого подъема клапанов согласно любому из вариантов выполнения настоящей заявки.
Технические эффекты, обеспечиваемые предложенным энергонезависимым машиночитаемым носителем информации, такие же, что и технические эффекты, обеспечиваемые предложенным способом управления механизмом 100 бесступенчатого подъема клапанов, и в данном документе их повторное описание не приводится
Выше описаны только предпочтительные варианты выполнения настоящего изобретения, которые не должны считаться ограничивающими. Любые модификации, эквивалентные решения и усовершенствования, выполненные в пределах сущности и идеи настоящего изобретения, не выходят за пределы объема его правовой охраны.
Описаны способ управления механизмом бесступенчатого подъема клапанов, устройство и энергонезависимый машиночитаемый носитель информации. Способ управления включает после подачи питания к двигателю самообучение механизма бесступенчатого подъема клапанов для определения текущего положения, в том случае, если самообучение выполнено успешно, расположение механизма бесступенчатого подъема клапанов в положении максимального подъема, подготавливая к запуску двигателя, и определение режима регулирования на основании исходной температуры, причем в момент запуска при нормальной температуре регулировку выполняют от положения максимального подъема до положения минимального подъема, а в момент запуска при низкой температуре регулировку выполняют от положения максимального подъема до положения, в котором два клапана одного и того же цилиндра имеют максимальную разность высот подъема, если самообучение выполнено неудачно, вводят режим предварительного запуска, вводят режим управления CVVL на основании режима работы двигателя и отключают двигатель. 3 н. и 7 з.п. ф-лы, 4 ил.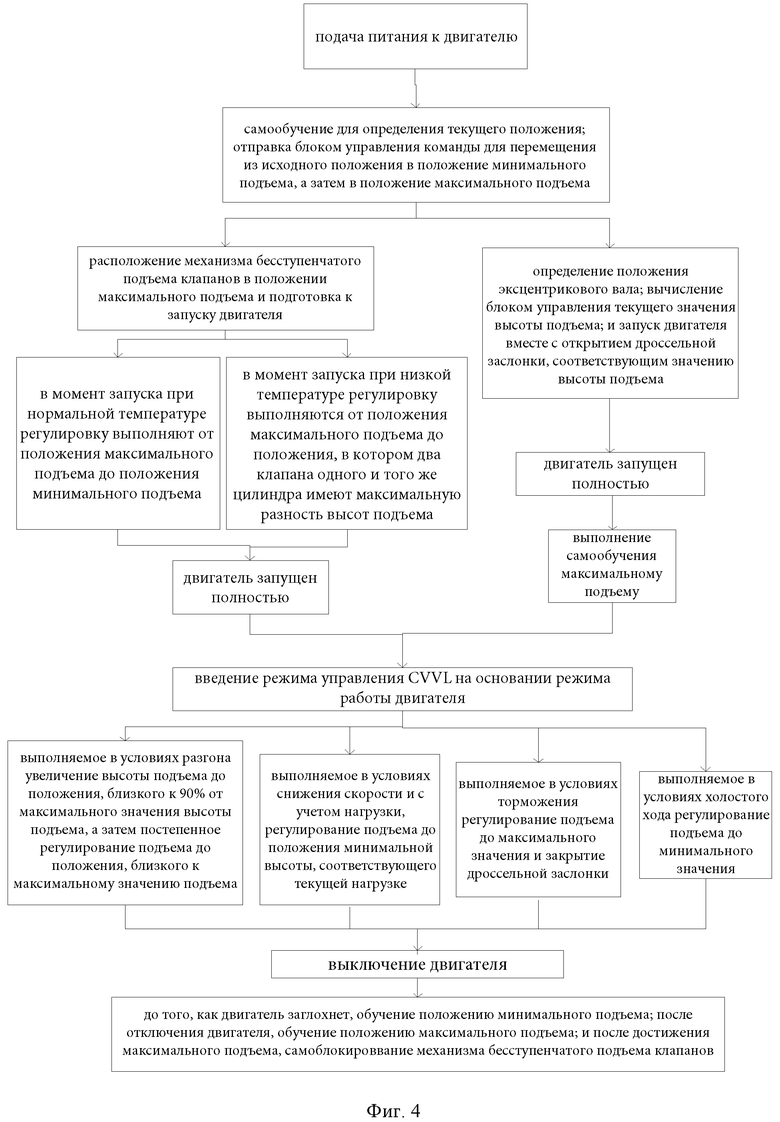
1. Способ управления механизмом бесступенчатого подъема клапанов, причем два клапана механизма бесступенчатого подъема клапанов для одного и того же цилиндра соответствуют эксцентриковым колесам, имеющим разные профили, при этом указанный способ включает
после подачи питания к двигателю самообучение механизма бесступенчатого подъема клапанов для определения текущего положения;
если самообучение выполнено успешно, механизм бесступенчатого подъема клапанов располагают в положении максимального подъема, подготавливая к запуску двигателя, и определяют режим регулирования на основании исходной температуры, причем в момент запуска при нормальной температуре регулировку выполняют от положения максимального подъема до положения минимального подъема, а в момент запуска при низкой температуре регулировку выполняют от положения максимального подъема до положения, в котором указанные два клапана одного и того же цилиндра имеют максимальную разность высот подъема;
если самообучение выполнено неудачно, вводят режим предварительного запуска;
вводят режим управления CVVL на основании режима работы двигателя; и
отключают двигатель.
2. Способ по п. 1, в котором этап начала самообучения механизма бесступенчатого подъема клапанов для определения текущего положения включает отправку блоком управления команды для перемещения из исходного положения в положение минимального подъема, а затем в положение максимального подъема.
3. Способ по п. 1 или 2, в котором механизм бесступенчатого подъема клапанов выполнен таким образом, что в положении максимального подъема направление результирующей силы роликового узла указанного механизма, действующей на эксцентриковое колесо, проходит через ось эксцентрикового вала, обеспечивая самоблокировку механизма бесступенчатого подъема клапанов в положении максимального подъема после успешного этапа самообучения.
4. Способ по любому из пп. 1-3, в котором режим предварительного запуска включает обнаружение положения эксцентрикового вала, вычисление блоком управления текущего значения высоты подъема и запуск двигателя вместе с открытием дроссельной заслонки, соответствующим значению высоты подъема.
5. Способ по п. 4, в котором режим предварительного запуска дополнительно включает после запуска двигателя самообучение механизмом бесступенчатого подъема клапанов максимальной высоте подъема.
6. Способ по любому из пп. 1-5, в котором этап введения режима управления CVVL на основании режима работы двигателя включает
в условиях разгона увеличение высоты подъема;
в условиях снижения скорости и с учетом нагрузки регулирование высоты подъема до положения минимальной высоты, соответствующего текущей нагрузке;
в условиях торможения регулирование высоты подъема до максимального значения и закрытие дроссельной заслонки и
в условиях холостого хода регулирование высоты подъема до минимального значения.
7. Способ по п. 6, в котором в условиях разгона высоту подъема увеличивают до положения, близкого к 90% от максимального значения высоты подъема, а затем постепенно регулируют до положения, близкого к максимальному значению подъема.
8. Способ по любому из пп. 1-7, который после этапа отключения двигателя дополнительно включает
до того, как двигатель заглохнет, обучение механизма бесступенчатого подъема клапанов положению минимального подъема;
после отключения двигателя обучение механизма бесступенчатого подъема клапанов положению максимального подъема и
после достижения максимального подъема самоблокирование механизма бесступенчатого подъема клапанов.
9. Устройство для реализации способа управления механизмом бесступенчатого подъема клапанов по любому из пп. 1-8, содержащее один или более процессоров, запоминающее устройство и одну или более программ, хранящихся в запоминающем устройстве, причем указанная одна или более программ при исполнении указанным одним или более процессором обеспечивают выполнение указанного способа управления.
10. Энергонезависимый машиночитаемый носитель информации, выполненный с возможностью хранения одной или более программ, причем указанная одна или более программ при выполнении одним устройством обеспечивают выполнение устройством, выполненным по п. 9, способа управления механизмом бесступенчатого подъема клапанов по любому из пп. 1-8.
| УСТРОЙСТВО ПРИВОДА КЛАПАНОВ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2526145C2 |
| МОДУЛЬ УПРАВЛЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ДЛЯ ОДНОГО КЛАПАНА ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2540344C1 |
| CN 106640386 A, 10.05.2017 | |||
| CN 106640380 A, 10.05.2017 | |||
| CN 104153839 B, 11.01.2017 | |||
| US 20120143465 A1, 07.06.2012. | |||

