Область техники
Настоящее изобретение относится к многофункциональным сенсорам для мобильных применений, а именно к миниатюрному оптическому датчику для дистанционного обнаружения микрообъектов и макробъектов и для измерения характеристик обнаруженных объектов.
Описание предшествующего уровня техники
Экологические проблемы больших городов стимулируют растущую потребность пользователей в датчиках мелкодисперсных частиц пыли и газа, которые пользователи могли бы использовать как одну из функций своих мобильных устройств. Необходимо отметить, что качество воздуха является одним из важнейших факторов, влияющих на здоровье человека. Как известно, частицы размером более 10 мкм, попадающие в организм с дыханием, в основном задерживаются в верхних дыхательных путях, в легкие проникают частицы размером менее 5-10 мкм. Особую опасность для здоровья представляют частицы размером до 2,5 мкм, такие частицы могут участвовать в газообмене легочных альвеол и являются канцерогенными, причем частицы размером менее 0,1 мкм (100 нм) проникают через мембраны клеток и достигают по кровотоку других органов тела. Во многих странах концентрации твердых частиц (PM2,5 для частиц <2,5 мкм и PM10 для частиц <10 мкм) включены в индекс качества воздуха. Концентрация PM2,5 и PM10 может значительно варьироваться во времени и в разных местах, поэтому пользователю может быть интересно и важно измерять концентрацию пыли в тех или иных местах своего пребывания и быть в курсе экологической обстановки вокруг в любой момент времени.
Однако, на сегодняшний день, датчики, использующиеся в устройствах для обнаружения пыли, например, в метеостанциях, воздухоочистителях, кондиционерах, являются громоздкими, дорогими, сложным в обращении и пригодным для использования только обученными специалистами. В распространенной бытовой электронике с функцией пылеудаления, такой как очистители воздуха и кондиционеры, обычно используют оптические светодиодные датчики размером от 5 см х 3 см х 2 см, очевидно, что датчики таких размеров невозможно использовать в мобильных устройствах.
На сегодняшний день разработано множество миниатюрных датчиков, выполняющих различные функции, которые возможно использовать в смартфонах, умных часах и других мобильных устройствах. Благодаря таким миниатюрным датчикам пользователь имеет возможность, например, измерять пульс, распознавать жесты, использовать трехмерные фотокамеры и видеокамеры, использовать акселерометр и гироскоп, позволяющие определять положение в пространстве и характеристики движения, выполнять панорамные фото и т.п. Увеличение функциональности интеллектуальных устройств за счет встраивания новых датчиков имеет очевидные ограничения: большее количество датчиков требует больше места, увеличивается энергопотребление, тепловая нагрузка и стоимость мобильных устройств.
Лучшим решением указанных проблем является разработка универсального датчика, объединяющего в себе множество функций. Известно, что техника интерферометрии позволяет измерять расстояния, скорости, вибрации, перемещения и т.д., и обладает достаточной чувствительностью для фиксации микрообъектов. Однако, большинство датчиков на основе интерферометра не подходят для поверхностного монтажа, поскольку большинство конструкций интерферометров слишком громоздкие и не очень прочные. Кроме того, интерферометрический подход требует использования множества отдельных оптических элементов (призм, светоделителей, линз, зеркал, поляризаторов и т.д.) и сложных процедур выравнивания, расположения источника излучения и приемника излучения в разных плоскостях, что снижает надежность, увеличивает производственные затраты, ограничивает возможности поверхностного монтажа и миниатюризации. Очевидно, что такие громоздкие схемы не подходят для использования в мобильных устройствах. Для мобильных устройств необходим миниатюрный достаточно плоский датчик, который можно припаять к одной плате без увеличения габаритных размеров мобильного устройства.
Известно решение, раскрытое документе JP 3702440 B2 (дата публикации 05.10.2005), описывает интерферометр Майкельсона, использующийся для спектрального анализа образца. Известное решение используется в качестве преобразовательного спектроскопического интерферометра или устройства измерения расстояния перемещения. Недостатком известного решения также является невозможность его использования в мобильных устройствах, невозможность объединения в известном устройстве таких функций, как измерение концентрации частиц, измерение расстояния до макрообъектов, измерение скорости макрообъектов.
Решение, раскрытое в документе US 9664909 B1 (дата публикации 30.05.2017), описывает различные модификации монолитного делителя пучка со встроенной фокусирующей линзой. Недостатками известного решения является невозможность поверхностного монтажа, то есть не решается проблема планарного расположения лазера и детектора, а также невозможность объединения в известном устройстве таких функций, как измерение концентрации частиц, измерение расстояния до макрообъектов, измерение скорости макрообъектов.
Наиболее близким аналогом является решение, раскрытое в документе US 2014/0226158 A1 (дата публикации 14.08.2014). В этом документе раскрыты способ и устройство для определения характеристик частиц. Устройство, раскрытое в данном документе, содержит источник излучения и детектор света, рассеянного от одной или более частиц, отражатель для направления света от источника излучения к детектору, причем свет, отраженный от отражателя, совмещается со светом, рассеянным от одной или более частиц, для получения интерференционного сигнала. Недостатком известного решения является невозможность объединения в известном устройстве упомянутых выше функций, а также является невозможность его использования в мобильных устройствах, невозможность объединения в известном устройстве таких функций, как измерение концентрации частиц, измерение расстояния до макрообъектов, измерение скорости макрообъектов. Кроме того, в указанном документе исследование производится в камере, то есть для исследования в камеру нагнетается воздух из свободного пространства.
Большинство известных устройств и датчиков являются слишком громоздкими и не могут быть встроены в такие небольшие мобильные устройства, как например, смартфоны, умные часы и т.п. Кроме того, известные датчики малоинформативны и не имеют возможности выполнять сразу несколько измерений.
Ввиду вышеперечисленного, необходим плоский миниатюрный датчик, который можно применять в мобильных устройствах, причем один миниатюрный датчик должен являться многофункциональным устройством, объединяющим, помимо измерения концентрации пыли, такие функции как измерение концентрации частиц, измерение расстояния до макрообъектов, измерение скорости макрообъектов.
Сущность изобретения
Предлагается многофункциональный оптический датчик, содержащий: по меньшей мере одну пару, состоящую из источника излучения и соответствующего ему приемника излучения; оптическую схему, включающую в себя коллимирующий элемент, первый оптический элемент, второй оптический элемент; причем: коллимирующий элемент выполнен с возможностью коллимации излучения от источника излучения; первый оптический элемент и второй оптический элемент, соединены между собой общей поверхностью, причем общая поверхность представляет собой полупрозрачную поверхность; первый оптический элемент содержит: входную поверхность для приема излучения, отражающую поверхность первого оптического элемента для отражения излучения, прошедшего через входную поверхность и направления отраженного излучения на полупрозрачную поверхность, причем полупрозрачная поверхность выполнена с возможностью разделения излучения от отражающей поверхности первого оптического элемента на опорное излучение и рабочее излучение; рабочую поверхность для вывода рабочего излучения, отраженного от полупрозрачной поверхности, и приема излучения, отраженного от объекта или рассеянного объектом; второй оптический элемент содержит: отражающую поверхность второго оптического элемента для отражения опорного излучения, прошедшего через полупрозрачную поверхность, выходную поверхность для вывода опорного излучения и излучения, отраженного от объекта или рассеянного объектом, к приемнику излучения, соответствующему источнику излучения; и причем все источники излучения и приемники излучения расположены в одной плоскости. Причем коллимирующий элемент может быть интегрирован с источником излучения. Причем коллимирующий элемент может быть интегрирован с первым оптическим элементом. Рабочая поверхность может выполнена с возможностью фокусировки рабочего излучения. Рабочая поверхность может быть выполнена в виде сферической линзы или асферической линзы. Причем рабочая поверхность может быть выполнена плоской. По меньшей мере одним источником излучения может являться вертикально излучающий лазер (VCSEL). Выходная поверхность может быть выполнена с возможностью фокусировки выходного излучения. Коллимирующий элемент может быть интегрирован с отражающей поверхностью первого оптического элемента, и выполнен в виде внеосевого параболического зеркала. Коллимирующий элемент может быть выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE). На рабочую поверхность может быть нанесен дифракционный оптический элемент (DOE) или голографический оптический элемент (HOE). Коллимирующий элемент может быть выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE), нанесенного на входную поверхность первого оптического элемента. Причем каждая из по меньшей мере одной пары, состоящей из источника излучения и соответствующего ему приемника излучения, работают на предопределенной длине волны. Многофункциональный оптический датчик может дополнительно содержать четвертьволновую пластинку, встроенную во входную поверхность первого оптического элемента, причем по меньшей мере один источник излучения является лазером с фиксированной поляризацией.
Также предлагается многофункциональный оптический датчик, содержащий: по меньшей мере одну пару, состоящую из источника излучения и соответствующего ему приемника излучения; оптическую схему, включающую в себя коллимирующий элемент, первый оптический элемент, второй оптический элемент, причем: коллимирующий элемент, выполнен с возможностью коллимации излучения от источника излучения; первый оптический элемент и второй оптический элемент, соединены между собой общей поверхностью, причем общая поверхность представляет собой полупрозрачную поверхность; первый оптический элемент содержит поверхность ввода/вывода для: ввода излучения от источника излучения и направления к полупрозрачной поверхности, причем полупрозрачная поверхность выполнена с возможностью разделения излучения, введенного через поверхность ввода/вывода, на опорное излучение и рабочее излучение; вывода опорного излучения и излучения, отраженного от объекта или рассеянного объектом, к приемнику излучения; отражающую поверхность первого оптического элемента для направления опорного излучения, отраженного от полупрозрачной поверхности, и излучения, отраженного от объекта или рассеянного объектом, к поверхности ввода/вывода для вывода из оптической схемы к приемнику излучения; второй оптический элемент содержит: рабочую поверхность для вывода рабочего излучения, прошедшего через полупрозрачную поверхность, и приема излучения, отраженного от объекта или рассеянного объектом, отражающую поверхность для направления излучения, отраженного от объекта или рассеянного объектом, через полупрозрачную поверхность к отражающей поверхности первого оптического элемента; и причем все источники излучения и приемники излучения расположены в одной плоскости. Причем коллимирующий элемент может быть интегрирован с источником излучения. Коллимирующий элемент может быть интегрирован с первым оптическим элементом. Рабочая поверхность может быть выполнена с возможностью фокусировки рабочего излучения. Причем рабочая поверхность выполнена в виде сферической линзы или асферической линзы. Рабочая поверхность может быть выполнена плоской. По меньшей мере одним источником излучения является вертикально излучающий лазер (VCSEL). Причем поверхность ввода-вывода может быть выполнена с возможностью фокусировки выходного излучения. Коллимирующий элемент может быть выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE). На рабочую поверхность может быть нанесен дифракционный оптический элемент (DOE) или голографический оптический элемент (HOE). Причем коллимирующий элемент выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE), нанесенного на поверхность ввода-вывода первого оптического элемента. Причем каждая из по меньшей мере одной пары, состоящей из источника излучения и соответствующего ему приемника излучения, работают на предопределенной длине волны. Коллимирующий элемент может быть интегрирован с отражающей поверхностью первого оптического элемента, и выполнен в виде внеосевого параболического зеркала.
Предлагается применение описанного выше многофункционального оптического датчика в качестве микрофона, датчика пыли, лидара, датчика PPG (фотоплетизмограмма).
Краткое описание чертежей
Вышеописанные и другие признаки и преимущества настоящего изобретения поясняются в последующем описании, иллюстрируемом чертежами, на которых представлено следующее:
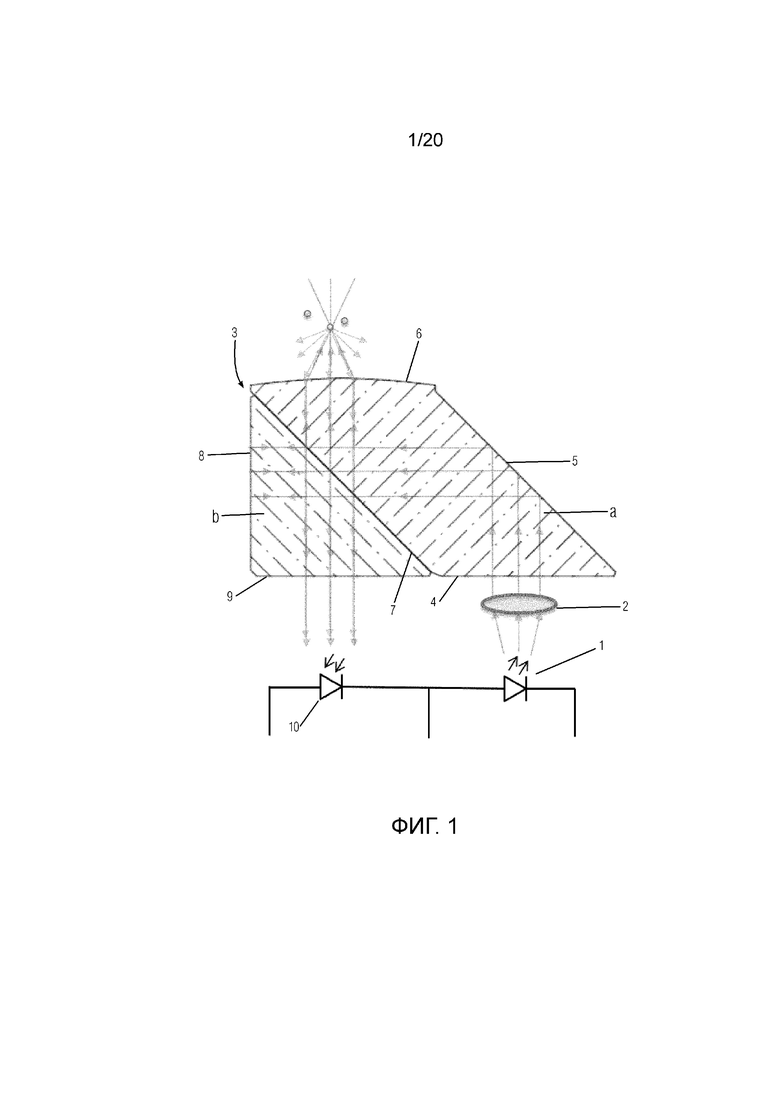
Фиг. 1 отображает вариант воплощения предлагаемого многофункционального миниатюрного датчика.
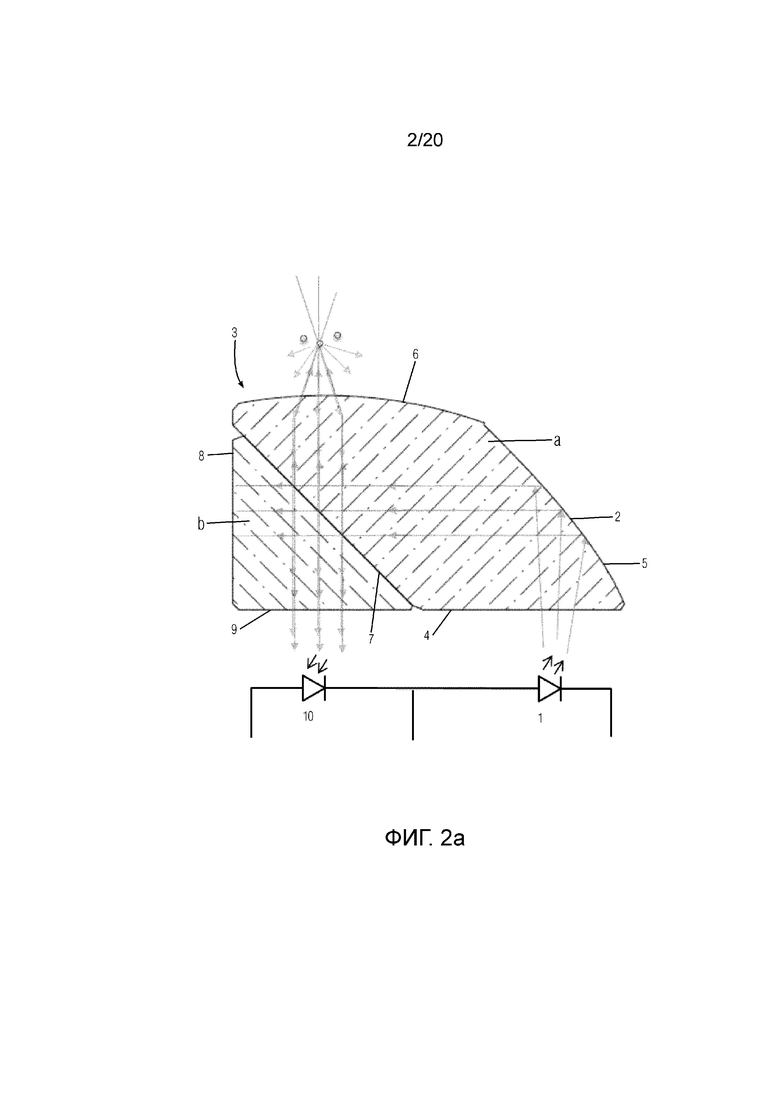
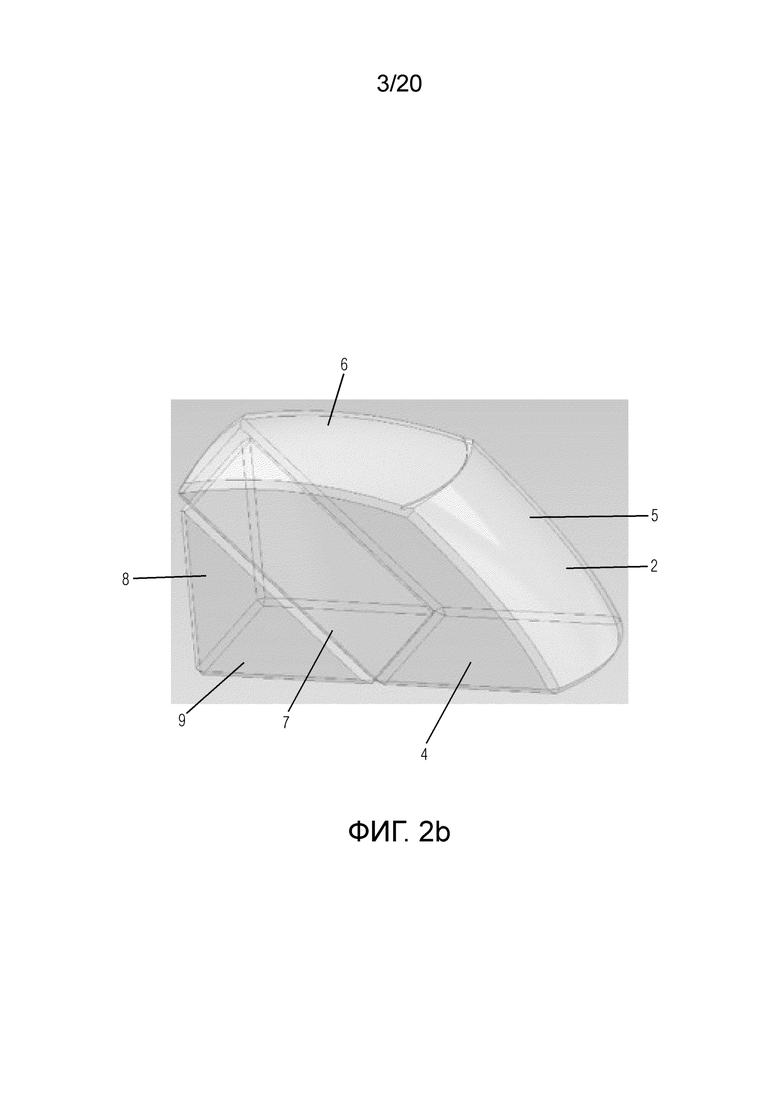
Фиг. 2a отображает вариант воплощения предлагаемого многофункционального миниатюрного датчика, в котором отражающая поверхность первого оптического элемента выполнена в виде внеосевого параболического зеркала.
Фиг. 2b изображает в объеме вариант воплощения предлагаемого многофункционального миниатюрного датчика, показанного на фиг. 2a.
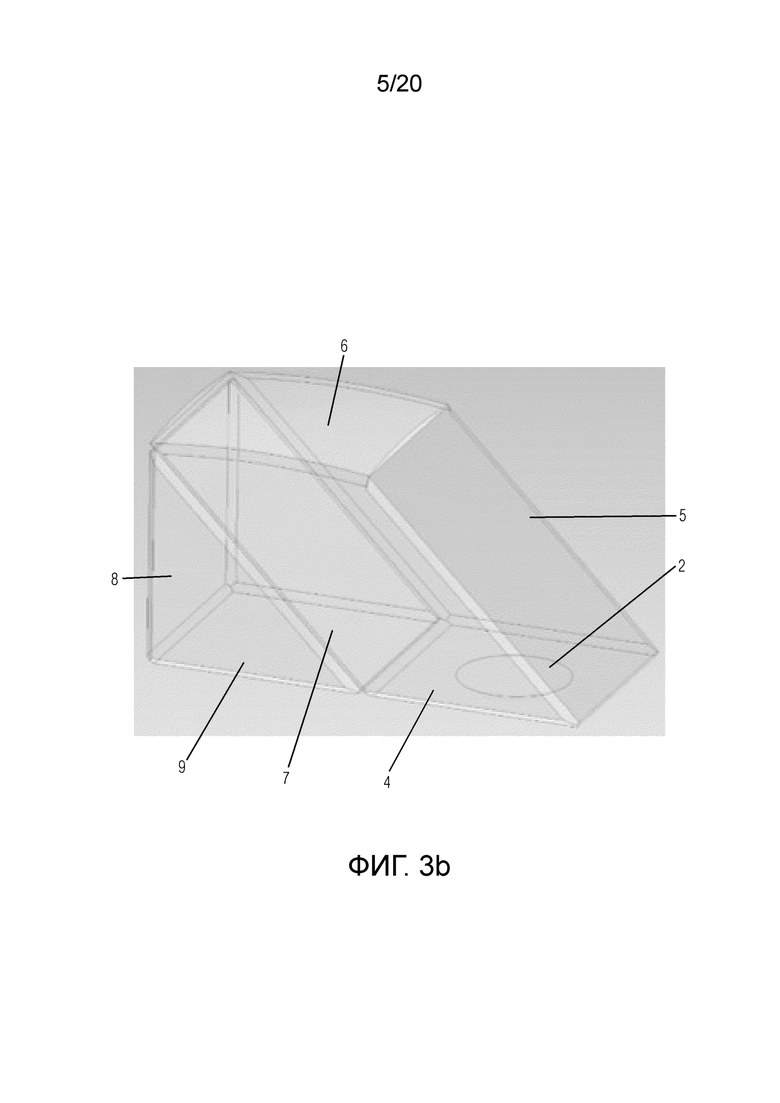
Фиг. 3a отображает схематичное представление предлагаемого многофункционального миниатюрного датчика, в котором коллимирующая линза интегрирована во входную поверхность оптической схемы.
Фиг. 3b изображает в объеме вариант воплощения предлагаемого многофункционального миниатюрного датчика, показанного на фиг. 3a.
Фиг. 4а проиллюстрирован вариант воплощения предлагаемого изобретения, в котором выходная поверхность выполнена с возможностью фокусировки выходного излучения.
Фиг. 4b изображает в объеме вариант воплощения предлагаемого изобретения, показанного на фиг. 4a.
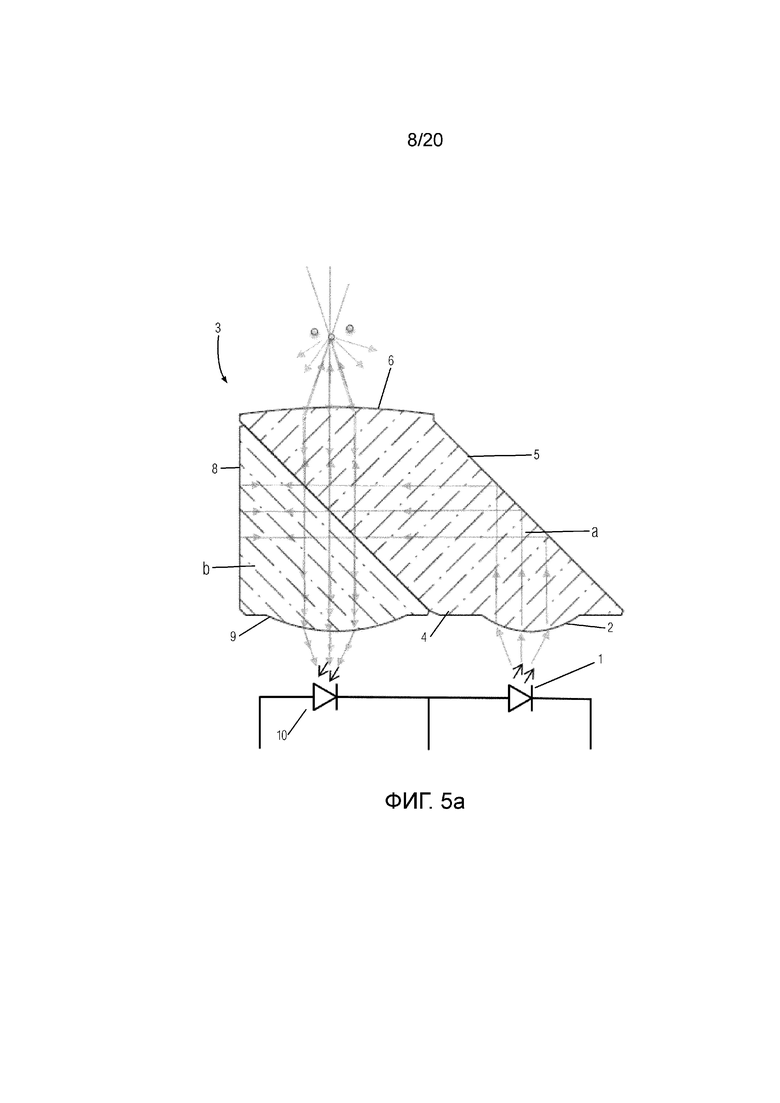
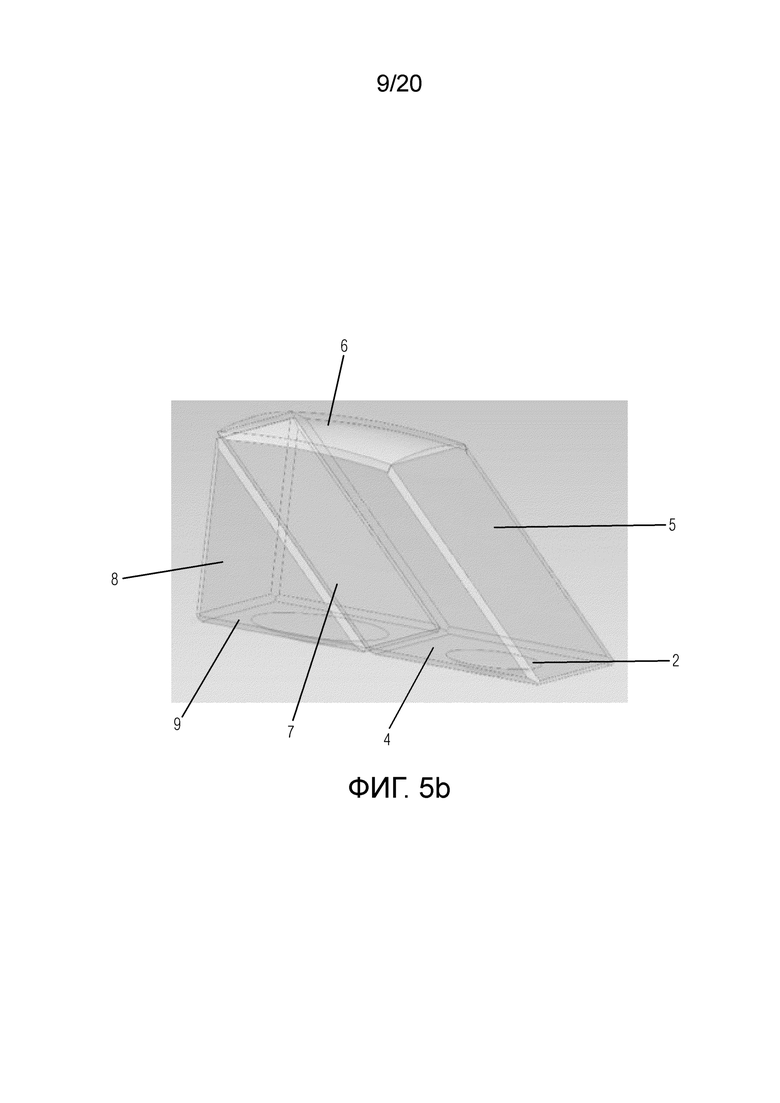
Фиг. 5а проиллюстрирован вариант воплощения предлагаемого изобретения, в котором коллимирующая линза интегрирована во входную поверхность, а выходная поверхность выполнена с возможностью фокусировки выходного излучения.
Фиг. 5b изображает в объеме вариант воплощения предлагаемого изобретения, показанного на фиг. 5a.
Фиг. 6 иллюстрирует вариант воплощения изобретения с использованием дифракционных решеток для фокусировки и коллимации.
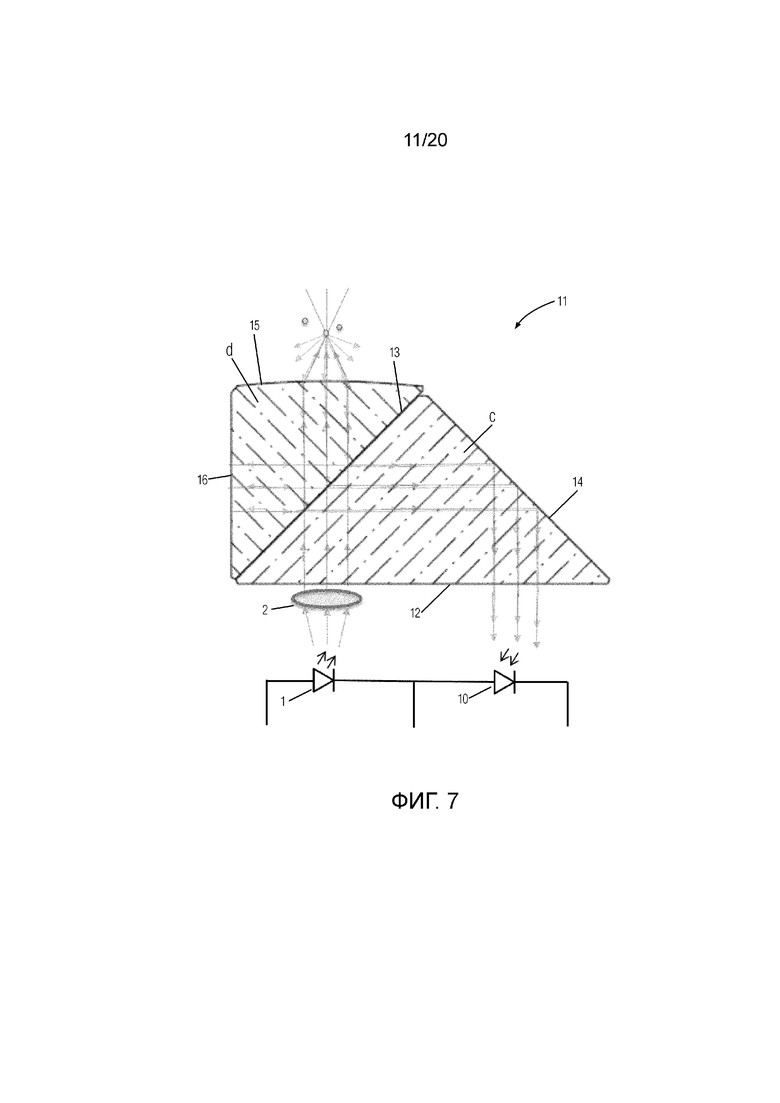
Фиг. 7 иллюстрирует вариант воплощения многоканального датчика пыли, в котором приемник и источник излучения расположены напротив поверхности ввода/вывода первого оптического элемента.
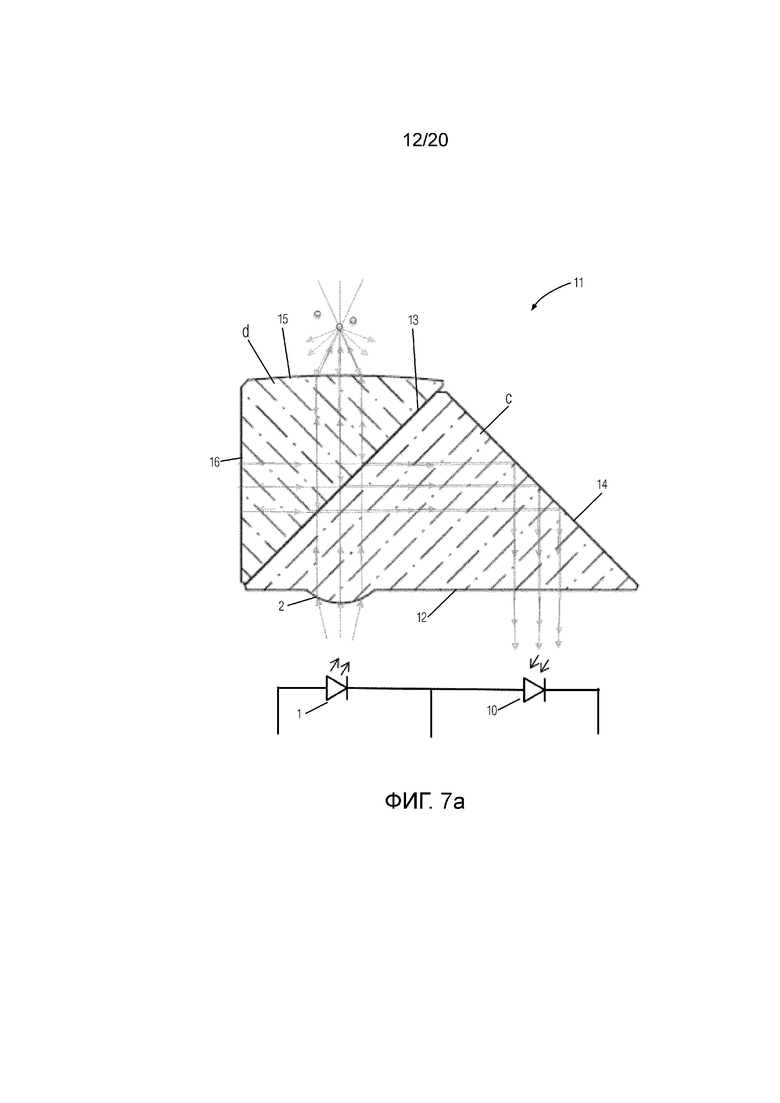
Фиг. 7а отображает схематичное представление предлагаемого миниатюрного датчика, в котором коллимирующая линза интегрирована во входную поверхность оптической схемы.
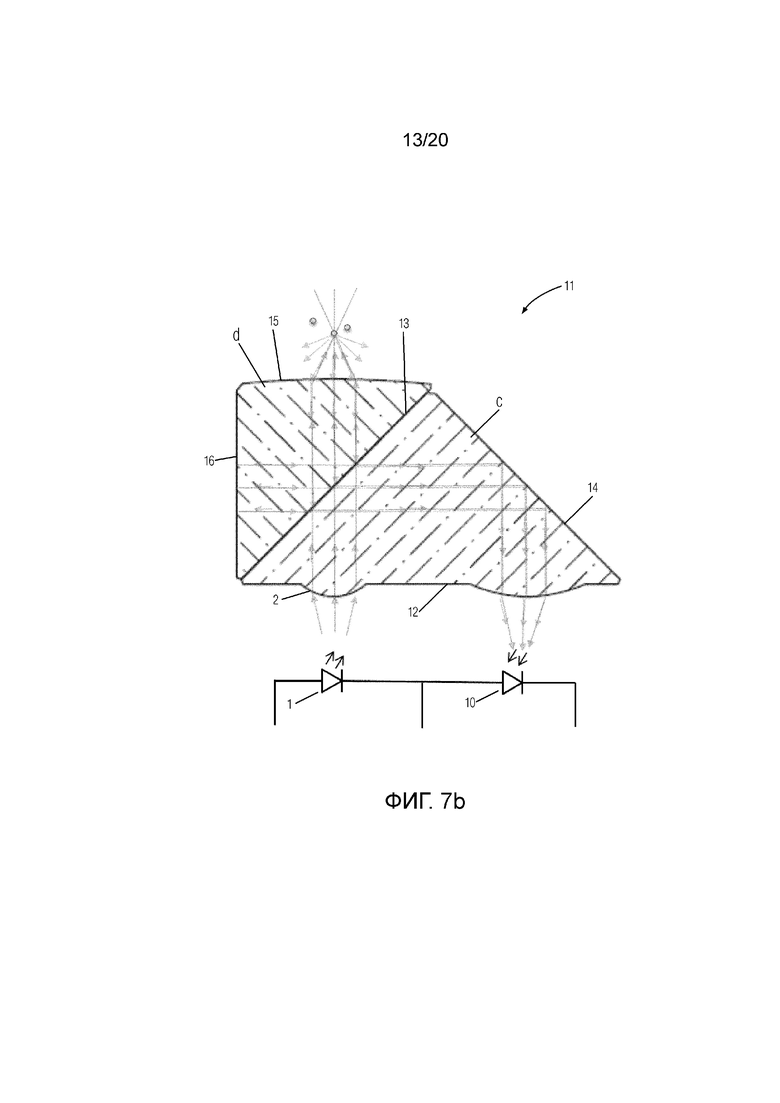
Фиг. 7b иллюстрирует вариант воплощения предлагаемого изобретения, в котором в поверхность ввода/вывода интегрирован коллимирующей элемент, а выходная поверхность выполнена с возможностью фокусировки выходного излучения.
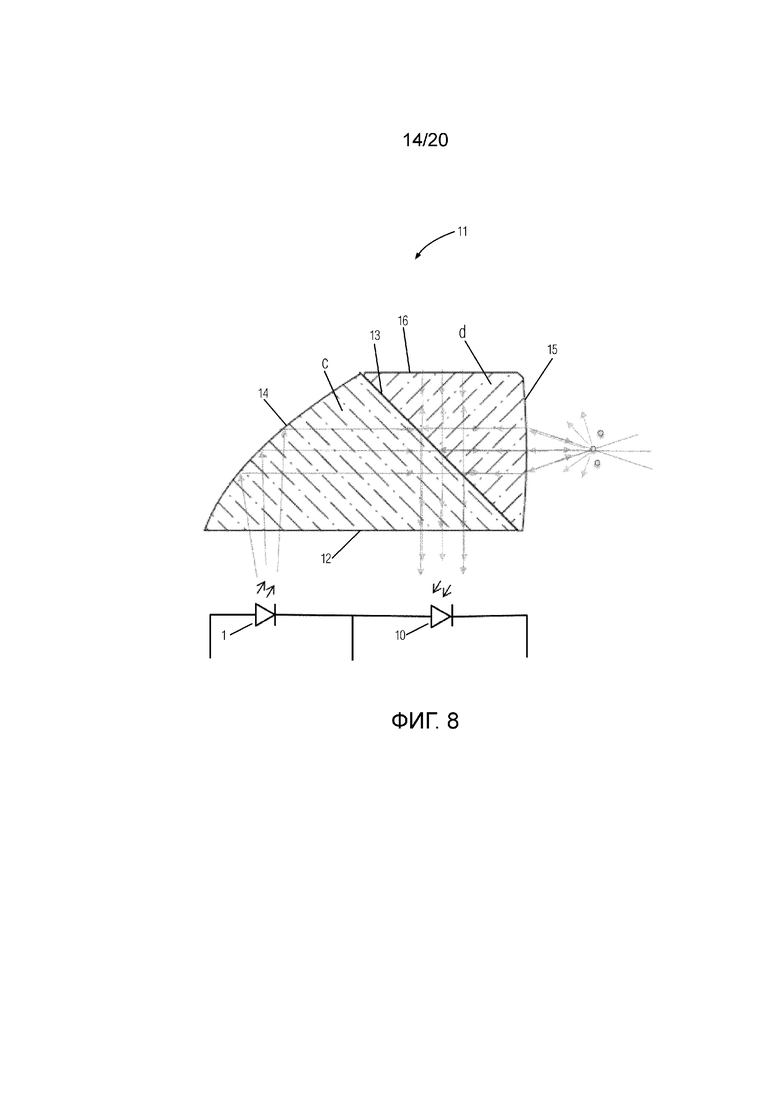
Фиг. 8 иллюстрирует вариант воплощения, в котором приемник и источник излучения расположены напротив поверхности ввода/вывода первого оптического элемента, а отражающая грань первого оптического элемента выполнена в виде внеосевого параболического зеркала.
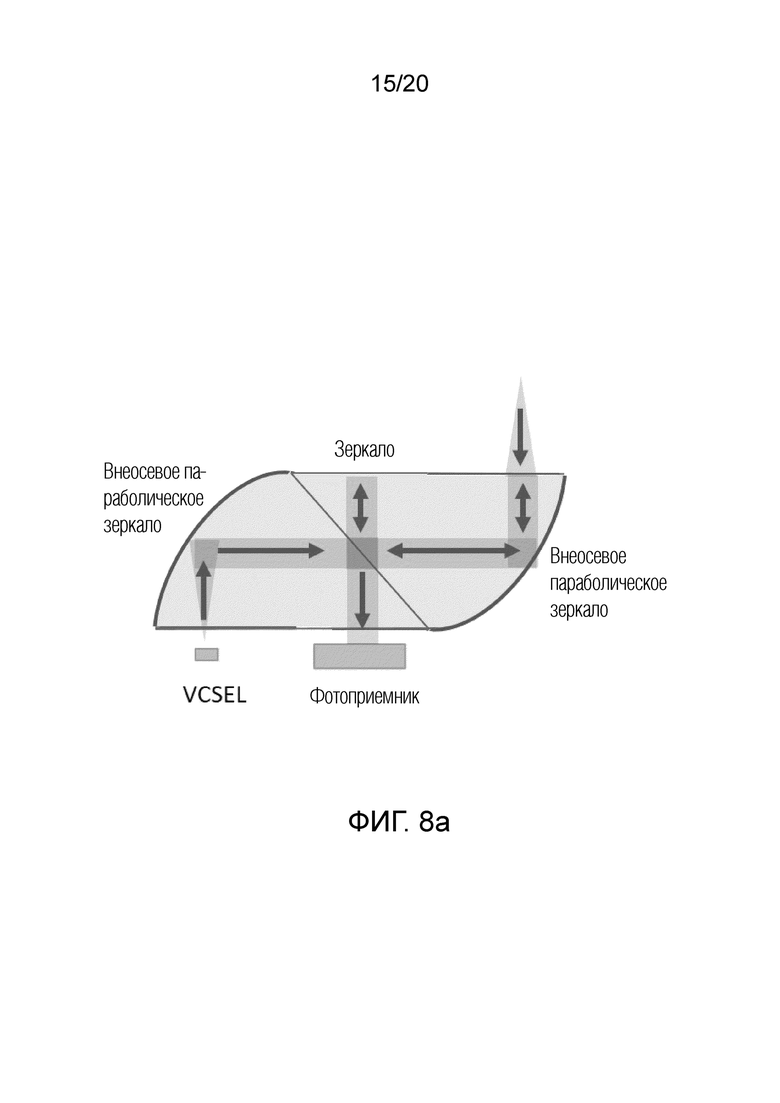
Фиг. 8а иллюстрирует вариант воплощения, в котором оптическая схема содержит два внеосевых параболических зеркала.
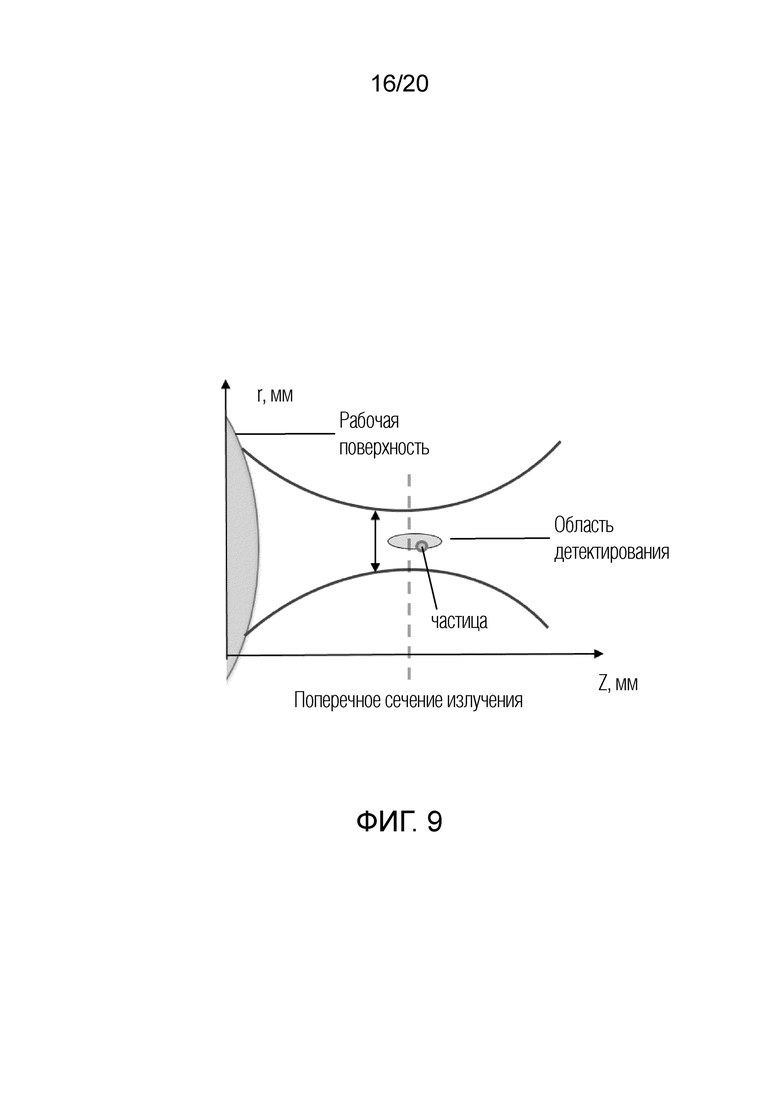
Фиг. 9 иллюстрирует область детектирования, в которую попадает микрообъект.
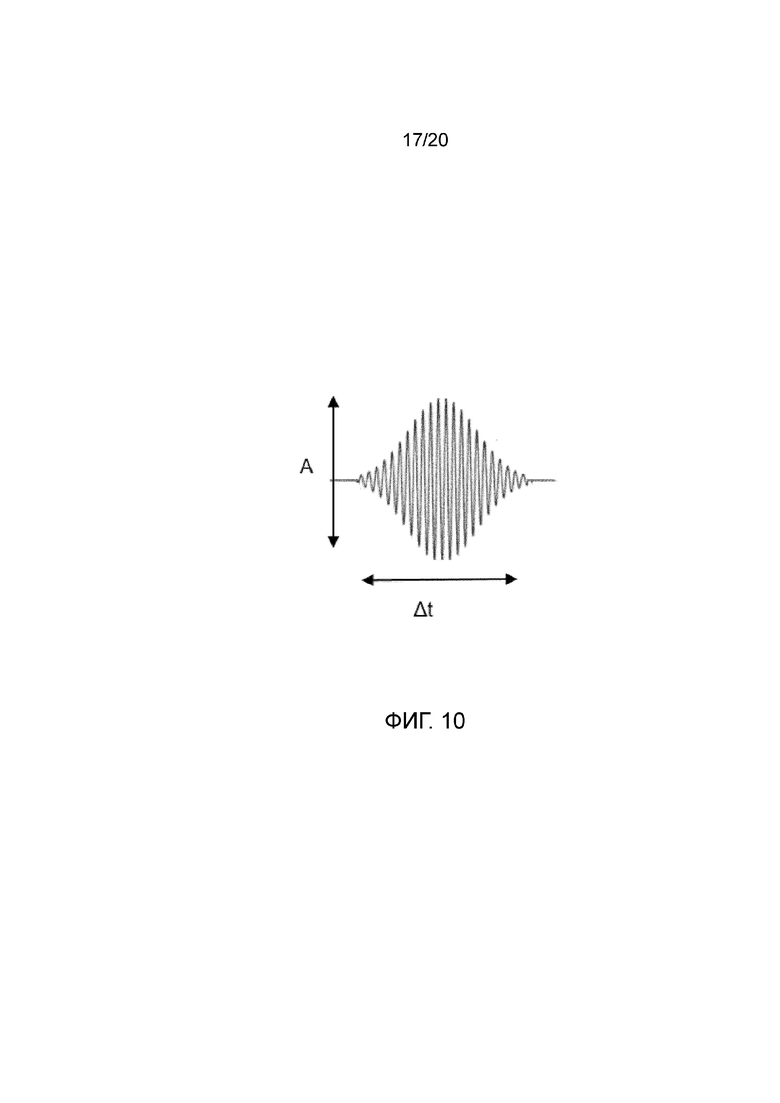
Фиг. 10 иллюстрирует зависимость переменной составляющей фототока, которая содержит гомодинный сигнал.
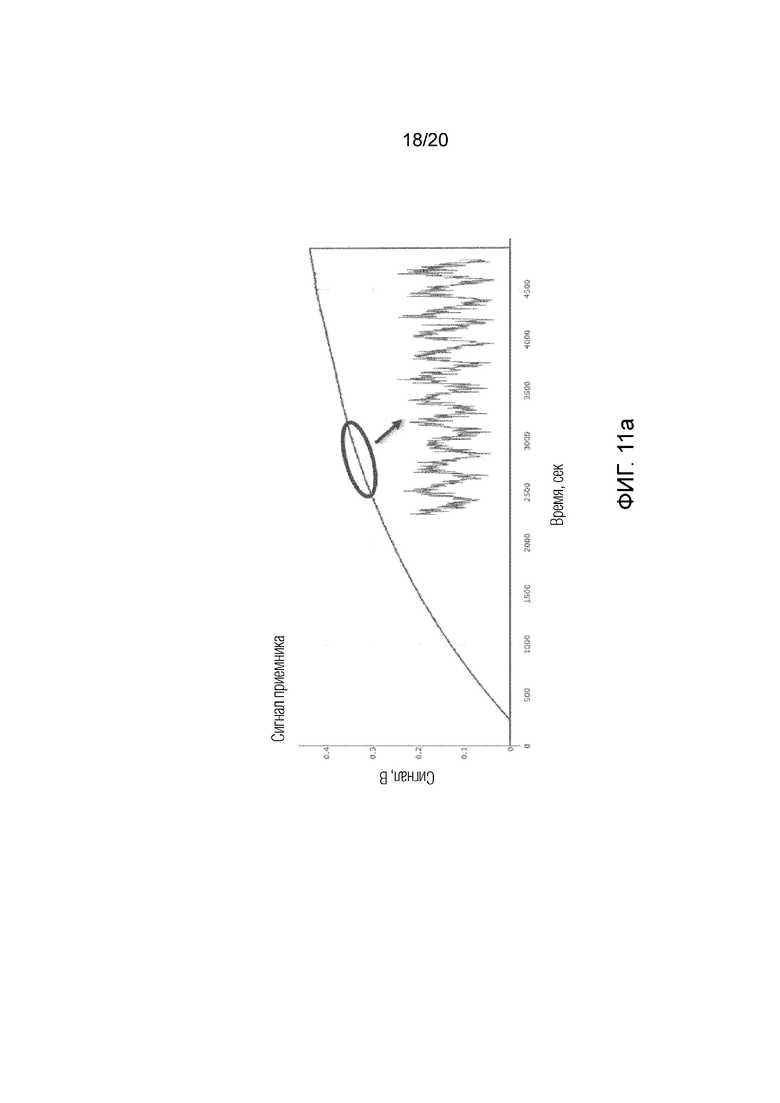
Фиг. 11а иллюстрирует график зависимости напряжения отраженного от макрообъекта сигнала от времени.
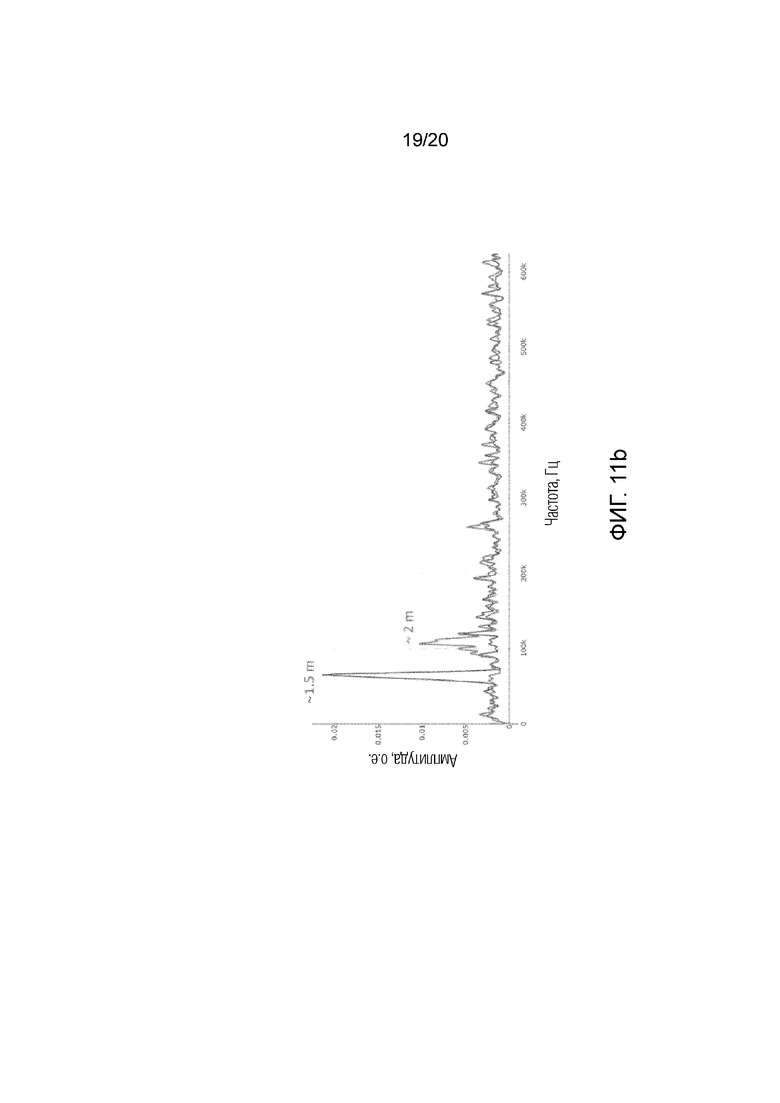
Фиг. 11b график зависимости амплитуды сигнала, отраженного от макрообъекта от частоты.
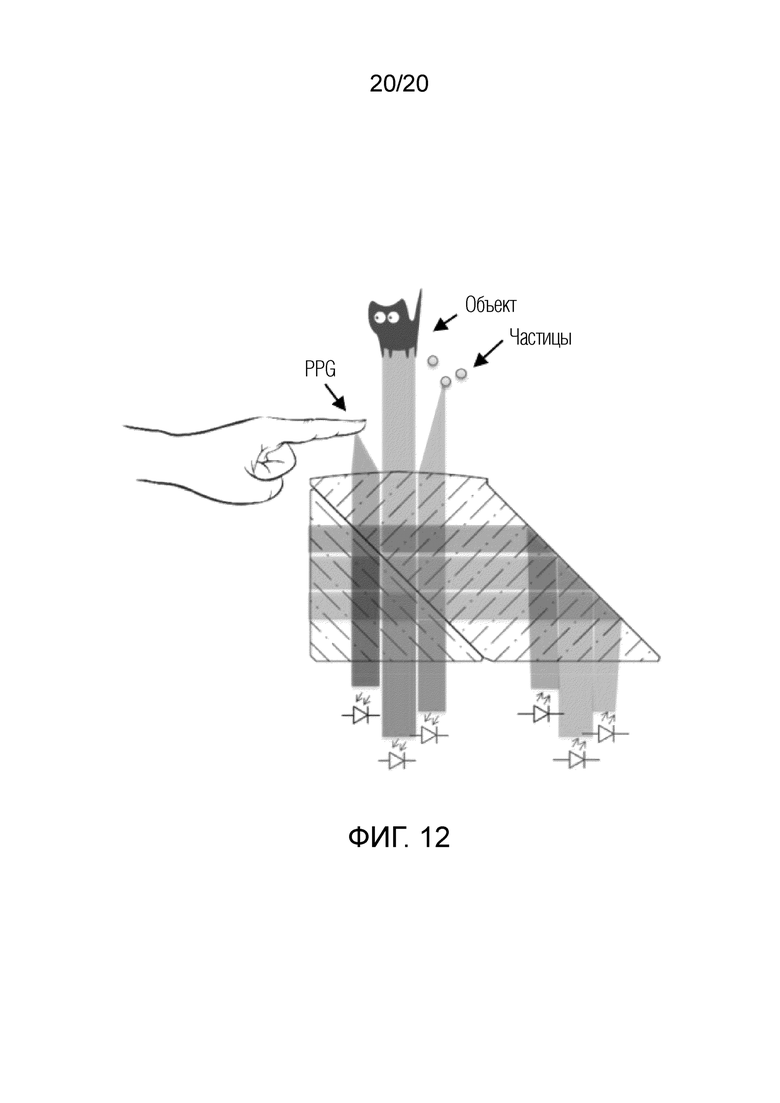
Фиг. 12 иллюстрирует миниатюрный датчик, содержащий множество измерительных каналов, выполняющих различные функции одновременно.
Подробное описание изобретения
Предлагается многофункциональный миниатюрный датчик-сенсор, имеющий размеры микросхемы, для обнаружения микрообъектов и макрообъектов, а также для измерения характеристик обнаруженных объектов. В настоящем изобретении под объектом подразумеваются любые микрообъекты, такие как, например, мелкие частицы пыли, эритроциты крови, или объекты макроразмера, расположенные на некотором расстоянии от датчика.
Предлагаемый многофункциональный датчик обладает следующими преимуществами:
- имеет миниатюрные размеры, что позволяет встраивать его в любую микросхему любого мобильного устройства без изменения модификации мобильного устройства;
- является маломощным, устойчивым к вибрациям;
- является безопасным для глаз пользователя, поскольку мощность используемого источника излучения не превышает предельно допустимых значений по ГОСТ IEC 60825-1-2013;
- является многофункциональным, то есть может работать в разных режимах, включая в себя функции датчика пыли, датчика приближения макрообъекта, датчика измерения расстояния до макрообъекта/ вибрации, то есть микроперемещения микрообъекта/перемещения макрообъекта/скорости, датчика PPG (фотоплетизмограмма), то есть датчика для регистрации кровяного потока, объема прокачиваемой крови, и измерения параметров распространения пульсовой волны (датчик пульса), что позволяет датчику измерять пульс, с дополнительной возможностью подавления артефактов движения. Артефакты движения представляют собой ошибки измерения, возникающие при движении объекта (в случае датчика PPG - это сложение сигнала от движения эритроцитов крови и сигнала от смещения браслета с датчиком относительно руки, также к таким ошибкам может приводить изменение объема кровеносных сосудов).
Как показано на фиг. 1, предлагаемый миниатюрный оптический датчик содержит источник 1 излучения; оптическую схему 3, включающую в себя коллимирующий элемент 2 и два соединенных оптических элемента; приемник 10, причем источник 1 излучения и приемник 10 излучения располагаются в одной плоскости.
Оптическая схема 3 состоит из коллимирующего элемента и двух оптических элементов, первого оптического элемента а и второго оптического элемента b, соединенных между собой, причем поверхность соединения указанных оптических элементов представляет собой общую полупрозрачную поверхность 7, на которую должен приходить параллельный (коллимированный) пучок излучения. Полупрозрачную поверхность 7 можно выполнить различными известными способами, например, путем нанесения на одну из соединяемых поверхностей светоделительного покрытия.
Первый оптический элемент а содержит
входную поверхность 4, выполненную с возможностью приема излучения;
отражающую поверхность 5 первого оптического элемента, выполненную с возможностью отражения излучения, прошедшего через входную поверхность 4, и направления отраженного излучения на полупрозрачную поверхность 7,
причем на поверхность 7 нанесено светоделительное (полупрозрачное) покрытие, падающий на него пучок разделяется на две части параллельного пучка излучения, пришедшего от отражающей поверхности 5 первого оптического элемента а на два параллельных пучка излучения, представляющих собой опорное излучение и рабочее излучение;
рабочую поверхность 6 для вывода рабочего излучения, отраженного от полупрозрачной поверхности 7, и приема излучения, отраженного от объекта или рассеянного объектом.
Рабочая поверхность 6 может быть выполнена с возможностью фокусировки рабочего излучения, очевидно, что фокусировка происходит за счет преломления света на границе двух сред, граница сред в данном случае представляет собой поверхность, принадлежащую оптическому элементу. Рабочая поверхность 6 может быть плоской, сферической, асферической и др. Необходимо отметить, что степень фокусировки, то есть кривизна рабочей поверхности 6, определяется типом объекта.
Второй оптический элемент b содержит отражающую поверхность 8, выходную поверхность 9.
Причем на отражающую поверхность 8 второго оптического элемента b попадает опорное излучение, прошедшее через полупрозрачную поверхность 7. Излучение, отраженное/рассеянное объектом, и опорное излучение выводятся из выходной поверхности 9.
Общеизвестно, что на плоскости приемника 10 излучения формируется интерференционная картина, фотодиод преобразует падающее на него изучение оптического диапазона в фототок.
На фигуре 2a показан один из вариантов воплощения предлагаемого изобретения, в котором коллимирующий элемент выполнен в виде внеосевого параболического зеркала. Необходимо пояснить, что при изготовлении оптических элементов сначала изготавливается оптический элемент со всеми заложенными геометрическими особенностями поверхностей, например, поверхности в виде внеосевой параболы, сферы, асферической поверхности и др. Затем на соответствующие поверхности наносятся соответствующие покрытия: светоделительные, отражающие, просветляющие.
На Фиг. 2b наглядно изображен в объеме вариант воплощения предлагаемого изобретения, показанный на фиг. 2a. В данном варианте воплощения не требуется применение отдельно стоящего коллимирующего элемента в виде коллимирующий линзы, поскольку расходящийся лазерный пучок, прошедший в первый оптический элемент а оптической схемы 3, преобразуется в параллельный пучок, благодаря тому, что отражающая поверхность 5 включает в себя коллимирующий элемент 5 первого оптического элемента а, представляющая собой внеосевое параболическое зеркало. В этом случае при изготовлении датчика, для коллимации источник 1 излучения помещается в фокусе параболического зеркала. Для того чтобы источник 1 излучения и приемник 10 находились в одной плоскости, выбрана часть параболоида, где коллимированное излучение повернуто на 90 градусов относительно падающего излучения. Характеристики параболического зеркала в данном случае выбираются, исходя из требований миниатюризации геометрических размеров всей системы. Такая конфигурация уменьшает количество элементов миниатюрного датчика, то есть упрощается конструкция, уменьшаются габаритные размеры и стоимость датчика. Кроме того, расположение источника излучения и приемника излучения в одной плоскости позволяет дополнительно уменьшить габариты датчика и упростить возможность поверхностного монтажа датчика.
Коллимирующий элемент для первого варианта воплощения, изображенного на фиг. 1, может быть, как отдельным элементом, так и элементом, интегрированным с лазерным диодом или интегрированным в первый оптический элемент а. На фиг. 3a показан вариант воплощения предлагаемого изобретения, в котором входная поверхность 4 выполнена в виде коллимирующего элемента. На Фиг. 3b наглядно изображен в объеме вариант воплощения предлагаемого изобретения, показанный на фиг. 3a.
На фиг. 4а показан вариант воплощения предлагаемого изобретения, в котором выходная поверхность 9 выполнена с возможностью фокусировки выходного излучения, фокусировка происходит за счет преломления света на границе двух сред, граница сред представляет собой поверхность, принадлежащую оптическому элементу. Выходная поверхность 9 может иметь искривленную форму. Фокусировка выходного излучения может быть необходима для некоторого вида фотоприемников, например, для быстродействующих фотоприемников, имеющих малые геометрические размеры, и может быть использована в любом из вариантов воплощения предлагаемого изобретения. На Фиг. 4b наглядно изображен в объеме вариант воплощения предлагаемого изобретения, показанный на фиг. 4a.
На фиг. 5а проиллюстрирован вариант воплощения предлагаемого изобретения, в котором коллимирующий элемент интегрирован во входную поверхность 4 первого оптического элемента а оптической схемы 3. Выходная поверхность 9 выполнена в виде искривленной поверхности с возможностью фокусировки выходного излучения, фокусировка происходит за счет преломления света на границе двух сред, граница сред в данном случае представляет собой выходную поверхность, принадлежащую оптическому элементу. На Фиг. 5b наглядно изображен в объеме вариант воплощения предлагаемого изобретения, показанный на фиг. 5a.
На фиг. 6 показан вариант воплощения предлагаемого изобретения, в котором для фокусировки рабочего излучения, для фокусировки выходного излучения, для коллимирования излучения (то есть в качестве коллимирующего элемента) используются дифракционные элементы 11, такие как, например, широко используемые оптические дифракционные элементы DOE или голографические дифракционные элементы HOE.
Такие дифракционные элементы могут быть нанесены на поверхности первого оптического элемента и второго оптического элемента и могут использоваться для коллимации и фокусировки проходящего излучения. Необходимо отметить, что возможно выполнение комбинированного варианта, в котором в качестве фокусирующих элементов используются и линзы, и дифракционные решетки. Преимущества использования DOE и/или HOE состоит в том, что геометрия оптических элементов a и b становится предельно простой, поскольку все рабочие поверхности в данном случае будут плоские, датчик с такой конфигурацией является наиболее компактным. Однако, из недостатков следует выделить большие потери оптического сигнала на DOE- и HOE- элементах по сравнению со сферическими, асферическими поверхностями.
Как видно на фиг. 6, коллимирующий элемент 2 может быть нанесен в виде DOE или HOE на входную поверхность 4 первого оптического элемента а, коллимация излучения от источника 1 излучения производится посредством нанесенных DOE или HOE.
Также на фиг. 6 показано, что на рабочую поверхность 6 первого оптического элемента а может быть нанесен дифракционный оптический элемент (DOE) или голографический оптический элемент (HOE) для фокусировки рабочего излучения.
На фиг. 6 также показано, что на выходную поверхность 9 второго оптического элемента b может быть нанесен дифракционный оптический элемент (DOE) или голографический оптический элемент (HOE) для фокусировки выходного излучения.
Использование дифракционных оптических элементов (DOE) или голографических оптических элементов (HOE) может еще больше уменьшить габариты предлагаемого датчика.
Источником 1 излучения может быть любой подходящий миниатюрный излучающий лазер. Необходимо заметить, что вертикально излучающий одномодовый лазер (VCSEL), используемый в качестве источника излучения, обладает рядом преимуществ. Применение одномодовых лазеров с вертикальным излучением (VCSEL) по сравнению с обычными фотодиодами позволяет избежать скачков мод, поскольку такие лазеры являются одномодовыми как продольно, так и поперечно, кроме того активная область излучения лазера VCSEL симметрична, представляет собой идеальный круговой луч, что обеспечивает хорошую фокусировку. Также лазеры VCSEL дешевы, устойчивы к нежелательной оптической обратной связи. Вертикальное излучение лазеров VCSEL упрощает монтаж на предлагаемом датчике, лазеры VCSEL также могут выполняться в массиве, а значит могут быть использованы для многоканальных применений.
Приемник 10 может представлять собой фотодиод, но также может быть любым подходящим приемником, например, PIN фотодиодом, ФЭУ, лавинным фотодиодом, фоторезистором и др.
Рабочая поверхность 6 может представлять собой фокусирующую поверхность и может быть выполнена в виде сферической линзы или асферической линзы, а также может быть плоской. Рабочая поверхность выполнена для фокусировки рабочего излучения на определенном расстоянии от поверхности лазера.
Необходимо отметить, что оптическая схема 3 выполняется монолитной за счет жесткой склейки двух оптических элементов, такая монолитная конструкция включает в себя все необходимые функции (направление луча, разделение, фокусировка), хорошо подходит для поверхностного монтажа, является компактной и надежной, поскольку оптическая схема не может разъюстироваться при тряске, то есть, например, при активном использовании мобильного устройства пользователем. Под поверхностным монтажом в данном случае понимаются операции установки (монтажа) предлагаемого многофункционального миниатюрного датчика непосредственно на электронную печатную плату без необходимости изготовления отверстий со стороны токопроводящих дорожек (smd-технология) с использованием стандартного оборудования совместно с другими электронными компонентами мобильного устройства.
Поскольку излучение от полупрозрачной поверхности 7 частично может возвращаться обратно к источнику излучения через входную поверхность 4, это может привести к нестабильности характеристик излучения, исходящего от источника излучения. Для устранения указанного недостатка в качестве источника 1 излучения можно использовать лазер с фиксированной поляризацией, при этом во входную поверхность первого оптического элемента встраивается четвертьволновая пластинка. Такая конструкция позволяет предотвратить попадание в источник излучения обратно отраженного излучения. Другими словами, лазер с фиксированной поляризацией в сочетании с четвертьволновой пластиной действует как оптический изолятор, поскольку для лазера с фиксированной поляризацией обратно в резонатор лазера может вернутся излучение с соответствующей поляризацией, совпадающей с исходной, но поляризация излучения после двукратного прохождения четвертьволновой пластинки меняется на ортогональную исходной, которая не сможет вернуться в резонатор лазера.
Далее будут рассмотрены варианты воплощения предлагаемого изобретения, конструкция которых помимо преимуществ, упомянутых выше, позволяет избежать потери части излучения, которая может возвращаться от полупрозрачной поверхности 7 обратно к источнику излучения через входную поверхность 4.
На фиг. 7 предлагаемый миниатюрный датчик содержит источник 1 излучения; оптическую схему 11, включающую в себя коллимирующий элемент 2 и два соединенных друг с другом оптических элемента; приемник 10 излучения. При этом источник 1 излучения и приемник 10 излучения расположены в одной плоскости.
Оптическая схема 11 состоит из коллимирующего элемента и двух оптических элементов, первого оптического элемента с и второго оптического элемента d, соединенных между собой, причем поверхность соединения указанных оптических элементов представляет собой полупрозрачную поверхность 13, которая делит излучение от источника излучения 1, коллимированное коллимирующим элементом 2 и прошедшее внутрь первого оптического элемента с через поверхность 12 ввода/вывода первого оптического элемента с, на два пучка - опорный и рабочий.
Опорный пучок отражается от полупрозрачной поверхности 13, попадает на отражающую поверхность 14 первого оптического элемента с, и отразившись от отражающей поверхности 14, выходит через поверхность 12 ввода/вывода первого оптического элемента с, попадает на приемник 10.
Рабочий пучок проходит через полупрозрачную поверхность 13, проходит внутри второго оптического элемента d к рабочей поверхности 15, фокусируется с помощью рабочей поверхности 15, сфокусированный рабочий пучок выходит из рабочей поверхности 15, отражается/рассеивается от объекта, проходит обратно во второй оптический элемент d через рабочую поверхность 15, в виде излучения, отраженного/рассеянного от объекта, отражается от полупрозрачной поверхности 13, отразившись проходит к отражающей поверхности 16 второго оптического элемента d, отражается от отражающей поверхности 16, опять попадая на полупрозрачную поверхность 13 (необходимо упомянуть, что принимается во внимание только ход полезного для работы датчика излучения), проходит через полупрозрачную поверхность 13, попадая на отражающую поверхность 14 первого оптического элемента отражается от нее, соединяется с опорным излучением, и выходит из поверхности ввода/вывода 12 первого оптического элемента. На плоскости приемника 10 формируется интерференционная картина, фотодиод преобразует падающее на него изучение оптического диапазона в фототок.
На фиг. 7a показан вариант воплощения предлагаемого изобретения, в котором часть поверхности 12 ввода/вывода, на которую падает излучение от источника 1 излучения выполнена в виде коллимирующего элемента, то есть коллимирующий элемент встроен в поверхность 12 ввода/вывода. Такая конфигурация уменьшает количество элементов, а значит уменьшаются габаритные размеры и стоимость датчика.
Фиг. 7b иллюстрирует вариант воплощения предлагаемого изобретения, в котором в поверхность 12 ввода/вывода интегрирован коллимирующей элемент, а выходная поверхность выполнена в виде искривленной поверхности с возможностью фокусировки выходного излучения.
На фиг. 8 проиллюстрирован вариант воплощения многофункционального миниатюрного датчика, в котором приемник и источник излучения расположены напротив поверхности ввода/вывода первого оптического элемента, а отражающая грань первого оптического элемента выполнена в виде внеосевого параболического зеркала. Такая конфигурация уменьшает количество элементов миниатюрного датчика, то есть упрощается конструкция, уменьшаются габаритные размеры и стоимость датчика.
Оптическая схема 11 также состоит из коллимирующего элемента и двух оптических элементов, первого оптического элемента с и второго оптического элемента d, соединенных между собой, причем поверхность соединения указанных оптических элементов представляет собой полупрозрачную поверхность 13.
Излучение от источника излучения 1 проходит поверхность 12 ввода/вывода и коллимируется, отражаясь от отражающей поверхности 14 первого оптического элемента с, представляющей собой внеосевое параболическое зеркало, направляется к полупрозрачной поверхности 13, где разделяется на рабочее излучение и опорное излучение. Опорное излучение преломляется полупрозрачной поверхностью 13 и через поверхность 12 ввода/вывода выходит к приемнику 10. Рабочее излучение пропускается полупрозрачной поверхностью 13, попадая во второй оптический элемент d, выходит из рабочей поверхности 15, фокусируясь, рассеивается объектом, рассеянное объектом излучение через рабочую поверхность 15 возвращается обратно во второй оптический элемент d, отражается от полупрозрачной поверхности 13, направляется к отражающей поверхности 16 второго оптического элемента d, от которой через полупрозрачную поверхность 13 попадает в первый оптический элемент с, и через поверхность 12 ввода/вывода попадает на приемник, который фиксирует интерференционную картину.
В варианте воплощения, показанном на фиг. 8а, поверхность 15 можно выполнить в виде внеосевого параболического зеркала, тогда поверхность 16 можно выполнить в виде рабочей поверхности, на которой рабочее излучение, отразившееся от поверхности 15, будет сфокусировано и направлено к объекту. После рассеяния объектом или отражения от объекта излучение, рассеянное объектом или отраженное от объекта, пройдет через поверхность 16, отразится от поверхности 15, отразится от полупрозрачной поверхности 13, снова попадет на поверхность 16, где расположено зеркало, отразившись от зеркала, излучение, рассеянное объектом или отраженное от объекта, пройдет полупрозрачную поверхность 13, и интерференционная картина будет зафиксирована приемником.
Область, в которой может фокусироваться рабочее излучение, находится на расстоянии 10-15 мм от рабочей поверхности предлагаемого миниатюрного датчика, и мощности излучения предлагаемого датчика хватает для того, чтобы регистрировать микрообъекты, а именно частицы размером от нескольких микрон до нескольких миллиметров, такие как, например, мелкие частицы пыли, кровяные тельца при измерении кровотока. Необходимо отметить, что чем больше мощность излучения, тем больше область детектирования, что позволяет проводить измерения быстрее и точнее, но при этом датчик должен быть безопасен для глаз, что ограничивает мощность излучения, поэтому выходная мощность выбирается близкой к разрешенной для данной длины волны. Причем определить, что было измерено, можно по характерному виду сигнала, например, на фиг. 10 показан характерный сигнал от одиночных частиц, на фиг. 11а характерный сигнал лидара. При измерении кровотока, то есть пульса, датчик должен быть направлен на кровеносные сосуды (например, на палец либо запястье), в этом случае вероятность детектировать частицы пыли крайне мала, а пользователь осведомлен о том, какое именно измерение он производит.
Рабочее излучение также может быть рассеяно или отражено макрообъектами, удаленными от рабочей поверхности на расстояние до нескольких метров. Для обнаружения микрообъектов и макрообъектов осуществляется два разных режима работы, между которыми датчик может переключаться пользователем.
При работе датчика в режиме обнаружения микрообъектов пучок рабочего излучения фокусируется не в точку, а область фокусировки имеет примерные оценочные размеры 5-10 микрон и длину по фокусу 30-50 микрон. Такая область, представляющая собой пространство, в котором фокусируется рабочее излучение далее будет называться термином «область детектирования». Область детектирования - это область пространства, где плотность падающего лазерного излучения достаточна (как правило вычисляется из необходимого соотношения сигнал/шум) для регистрации рассеянного излучения от объекта с заданными характеристиками (размер, материал и др.).
Микрообъекты (частицы пыли, эритроциты и т.п.) рассеивают очень мало света по сравнению с макрообъектами, поэтому необходимо сконцентрировать достаточное количество энергии в небольшой области для обнаружения микрообъектов.
На Фиг. 9 показана область детектирования, в которую попадает микрообъект. По оси X откладывается расстояние Z от рабочей поверхности, по оси Y откладывается ширина r рабочей поверхности, которая фокусирует рабочее излучение. Как видно из фиг. 9 область детектирования представляет собой пространство, расположенное рядом с перетяжкой, где плотности оптического излучения хватает для регистрации сигнала от объекта. При этом очевидно, что, попадая в область детектирования, микрообъект облучается сфокусированным пучком, то есть интенсивность рассеянного излучения от частицы будет самой высокой именно в этом пространстве. Объекты облучаются когерентным излучением, рассеянное/отраженное от объекта излучение оптически смешивается на фотодетекторе с опорным излучением (гомодинирование).
На Фиг. 10 показана зависимость гомодинной составляющей фототока от времени. На графике отображены сигналы на фотодетекторе от микрообъекта, попавшего в область детектирования. Очевидно, что обратное рассеяние излучения микрообъектом зависит от размера частицы, большие частицы рассеивают больше, маленькие меньше. То есть, по амплитуде (А) сигнала можно судить о том, каким размером обладает частица. С помощью предлагаемого датчика возможно определять размер каждого микрообъекта, попавшего в область детектирования по-отдельности.
Ниже представлена формула расчета гомодинного сигнала
 (1)
(1)
ihom - гомодинный сигнал, являющаяся результатом смешения опорного лазерного излучения и рассеянного лазерного излучения на чувствительной площадке фотодетектора, данная составляющая ihom фототока является результатом смешения двух волн. В случае, когда рассеивающий объект движется в направлении к/от источника, в данном фототоке присутствует вклад эффекта Доплера (Wd ≠ 0),
iLO - фототок, соответствующий лазерному излучению опорного пучка,
iscat - фототок, соответствующий лазерному излучению рассеянного пучка
Wd - доплеровский сдвиг частоты лазерного излучения (разность частот опорного излучения и излучения, рассеянного движущимся объектом),
t - время,
∆φ (x, y, z) = φLO - φscat - разность фаз колебаний опорного и рассеяного пучков
φLO - фаза колебаний лазерного излучения опорного пучка;
φscat - фаза колебаний лазерного излучения рассеянного пучка.
По формуле (1) определяют Wd -доплеровский сдвиг частоты лазерного излучения.
Число частиц в единице объема связано с концентрацией частиц следующим образом (частицы предполагаются сферическими):
 (2)
(2)
Nv - число частиц в единице объема (1/м3)
 - плотность частицы (кг/м3)
- плотность частицы (кг/м3)
 - радиус частицы (м)
- радиус частицы (м)
С - концентрация частиц (кг/м3)
Регистрация отдельных частиц с измерением их скорости позволяет измерить Nv:
 - количество зарегистрированных частиц
- количество зарегистрированных частиц
t - время измерения (с)
S - эффективная площадь поверхности области детектирования (м2). (область детектирования представляет собой область пространства, в котором фокусируется лазерное излучение)
 - скорость частиц (м/с), которая определяется из измерения доплеровского сдвига частоты излучения.
- скорость частиц (м/с), которая определяется из измерения доплеровского сдвига частоты излучения.
Причем скорость частицы определяется из уравнения следующим образом:
=Wd*C/WLO (3)
C - скорость света;
WLO - частота лазерного излучения.
Таким образом, определив Wd из уравнения (1), затем скорость частицы из уравнения (3), с помощью уравнения (2) можно найти концентрацию частиц в данной области детектирования.
Гомодинный прием (режим) - разновидность когерентного приема, основанного на смешении двух электромагнитных волн - опорной и сигнальной. В отличие от гетеродинного приема обе волны имеют один источник излучения. Как видно из формулы (1), гомодинный сигнал зависит от разности фаз опорной и рассеянной волны ∆φ (x, y, z), следовательно, данный метод может быть использован для фазовой демодуляции регистрируемого сигнала. Именно гомодинный сигнал зависит от доплеровского сдвига частоты излучения Wd, и именно этот метод используется для определения скорости частицы. Кроме того, гомодинный сигнал также пропорционален амплитуде опорного излучения, что обеспечивает усиление малого сигнала, вызванного рассеянием микрообъекта.
Если микрообъекты попадут не только в область детектирования, то они тоже будут рассеивать свет, но с меньшей интенсивностью, чем в области детектирования, то есть вкладом излучения от таких микрообъектов можно пренебречь, ввиду его малости, поскольку большая часть энергии излучения сконцентрирована в области детектирования.
В случае, когда исследуемая среда является совокупностью движущихся микрообъектов, возникает проблема многочастичного рассеяния, которое вносит вклад в частотную структуру фотоэлектрического тока и искажает результаты измерений. Как показывают исследования, для микрообъектов, движущихся со скоростями порядка 0,1 мм/с вклад одиночных событий является основным вплоть до концентраций порядка десятков мг/м3, что является чрезвычайно большой величиной. В общем виде данная погрешность является неустранимой, однако она проявляется при чрезвычайно больших концентрациях микрообъектов, при которых применение данного датчика нецелесообразно.
Необходимо отметить, что, говоря о смешении двух волн нужно указывать, на каком элементе происходит смешение. Для того чтобы зарегистрировать частотный сдвиг, опорный и рассеянный пучки должны быть сфокусированы в плоскости приемника (фотодетектора).
С помощью предлагаемого датчика пользователь может определить, как концентрацию пыли, так и концентрацию кровяных телец в сосуде. При определении изменения концентрации кровяных телец (эритроцитов в сосуде) с течением времени определяется пульс, при работе используется излучение красной и ближней ИК-области, при этом пользователь просто прикладывает к рабочей поверхности палец. При этом пульс измеряется по изменению концентрации кровяных телец, которая определяется аналогично концентрации пыли.
Предлагаемый датчик может работать, как высокочувствительный оптический микрофон. Такой микрофон лучше защищен от помех. Датчик дистанционно обнаруживает вибрации мышц лица пользователя. Вибрации мышц лица модулируют расстояние до сенсора с частотой голоса, что приводит к соответствующей модуляции фазы рассеянной волны относительно опорной. Это вызывает аналогичную модуляцию в регистрируемом сигнале.
Далее описан режим работы предлагаемого датчика для обнаружения (исследования) макрообъектов, расположенных на большом расстоянии от рабочей поверхности, то есть в качестве лидара. Необходимо заметить, что в режиме обнаружения макрообъектов и их скорости фокусировка излучения не нужна, поскольку это соответствует оптимальному режиму работы датчика в качестве лидара, поскольку коллимированное излучение дает максимальную дальность обнаружения макрообъекта. Однако датчик может работать в качестве лидара и со сфокусированным излучением, но максимальное расстояние, на котором может быть обнаружен объект будет меньше. лидар также будет работать, но на меньшем максимальном расстоянии, при таком режиме работы сохранится функциональность датчика и для обнаружения микрообъектов вблизи фокуса.
В этом режиме возможны два варианта работы: режим перестройки длины волны лазера и режим измерения относительного смещения.
Перестройка длины волны лазера (сканирование):
В этом варианте применяется развертка по длинам волн лазера. Эта развертка может быть реализована с помощью развертки по току накачки лазера. Обратное рассеяние излучения вызывает осциллирующий сигнал на детекторе. Частота осциллирующих сигналов линейно связана с расстоянием до макрообъекта и скоростью макрообъекта относительно датчика. Применяя Фурье преобразование можно одновременно измерять расстояние до макрообъекта и скорость макрообъекта.
На источник 1 излучения, представляющий собой лазер, подается пилообразное напряжение, при этом мощность лазера также изменяется пилообразно, при этом из-за процессов разогрева лазера (лазер нагревается из-за изменения тока, больше ток - выше температура), изменяется частота излучения (то есть и длина волны) лазера, при нагреве лазера частота излучения смещается в длинноволновую область. При отражении от макрообъекта такое излучение будет иметь осцилляции причем частота осцилляций отраженного от макрообъекта излучения пропорциональна расстоянию до макрообъекта.
На фиг. 11а отображен график зависимости напряжения отраженного от макрообъекта сигнала от времени. После проведенного Фурье преобразования этой зависимости получается график зависимости амплитуды сигнала, отраженного от макрообъекта от частоты, показанный на фиг. 11b, результаты получены для стационарного объекта. При наличии модуляции частоты (длины волны излучения) лазерного излучения, фаза отраженного сигнала изменяется в соответствии с изменением длины волны, в каждый момент времени на расстоянии до объекта укладывается разное число длин волн, что приводит к осцилляциям в регистрируемом сигнале, т.к. предлагаемый датчик использует фазочувствительный прием, этот принцип полностью аналогичен известному методу FMCW-лидара. Ниже приведена формула для расчета положения пика в спектре из которой можно вычислить расстояние до объекта:
f=2L Δν/ΔT
ΔT - ширина импульса модуляции [c];
Δν - диапазон изменения частоты лазерного излучения в волновых числах [1/см], волновое число ν=1/λ, где λ - длина волны лазерного излучения;
L - расстояние до объекта [cм];
f - положение пика в спектре [Гц].
Режим измерения относительного смещения. В этом режиме возможно определить смещение объекта относительно начального положения, т.е. начальное положение принимается за 0, вычисляется мгновенная скорость объекта. Формулы для определения скорости макрообъекта совпадают с формулами для расчета скорости микрообъекта. Поскольку известны скорость и время движения макрообъекта, может быть вычислено изменение положения макрообъекта относительно начального положения.
На фиг. 12 показан многофункциональный миниатюрный датчик, содержащий множество измерительных каналов, выполняющих различные функции одновременно.
Предлагаемый миниатюрный датчик может предусматривать не один измерительный канал, имеющий источник излучения и приемник излучения, а множество измерительных каналов, каждый из которых должен иметь свой отдельный источник излучения и соответствующий ему приемник излучения. Каждый измерительный канал из множества измерительных каналов может выполнять свою функцию, например, один из каналов измеряет пульс, другой канал обнаруживает скорость удаленных объектов и расстояние до них, а еще один канал измеряет концентрацию пыли, при этом источник излучения каждого измерительного канала должен иметь соответствующую длину волны.
В каждом измерительном канале может быть предусмотрено свое необходимое фокусное расстояние, определяемое типом исследуемого объекта. Например, короткое фокусное расстояние применяется для PPG сенсора, среднее фокусное расстояние применяется для пыли, и длинное фокусное расстояние применяется для датчика расстояния. Фокусное расстояние одного измерительного канала можно сделать изменяемым за счет усложнения системы, например, применяя адаптивную линзу или добавляя перемещающийся элемент, однако такую схему уже нельзя считать монолитной.
Благодаря своим компактным размерам предлагаемый миниатюрный датчик может быть встроен в обычный смартфон, а также может использоваться в умных часах, а также в бытовой технике, например, в роботах-пылесосах, в которых требуется обнаружение микрообъектов и макрообъектов, кондиционерах и т.п. Как было описано, один миниатюрный датчик может иметь множество функций: определение концентрации пыли, определение пульса пользователя, определение расстояния до объекта и скорости объекта, использование в качестве высокочувствительного микрофона.
Предлагаемый датчик можно использовать для игр и приложений, использующих совмещение виртуальной реальности и реальной реальности для компенсации ошибок рендеринга, вызванных движением пользователя относительно сцены. Датчик может точно определять смещение, скорость относительно сцены и расстояние до объектов реального мира. Эта информация может использоваться в качестве сигнала обратной связи для улучшения сопоставления объектов виртуальной реальности с объектами реального мира. Информация о перемещении пользователя может быть включена в различные сценарии взаимодействия пользователя с объектами виртуальной реальности.
Также предлагаемый миниатюрный датчик может использоваться как недорогой аналог TOF-сенсоров.
Хотя изобретение описано в связи с некоторыми иллюстративными вариантами осуществления, следует понимать, что сущность изобретения, не ограничивается этими конкретными вариантами осуществления. Напротив, предполагается, что сущность изобретения включает в себя все альтернативы, коррекции и эквиваленты, которые могут быть включены в сущность и объем формулы изобретения.
Кроме того, изобретение сохраняет все эквиваленты заявляемого изобретения, даже если пункты формулы изобретения изменяются в процессе рассмотрения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптического обнаружения и визуализации нанообъектов с субдифракционным разрешением в микроканале | 2022 |
|
RU2788031C1 |
| УСТРОЙСТВО ДЛЯ РАСШИРЕНИЯ ПУЧКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И СПОСОБ РАСШИРЕНИЯ ПУЧКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ДЛЯ КОГЕРЕНТНОЙ ПОДСВЕТКИ | 2020 |
|
RU2762176C1 |
| УСТРОЙСТВО ДОПОЛНЕННОЙ РЕАЛЬНОСТИ НА ОСНОВЕ ГОЛОГРАФИЧЕСКОГО ОПТИЧЕСКОГО ВОЛНОВОДА | 2020 |
|
RU2740065C1 |
| Интерферометр для контроля плоскостности отражающих поверхностей | 1990 |
|
SU1744452A1 |
| Интерферометр для контроля плоскостности отражающих поверхностей | 1990 |
|
SU1760312A1 |
| УСТРОЙСТВО ФОКУСИРОВКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2005 |
|
RU2289153C1 |
| Устройство для контроля углового положения дифракционных порядков дифракционных элементов (варианты) | 2016 |
|
RU2634372C1 |
| Способ исследования микрообъектов и ближнепольный оптический микроскоп для его реализации | 2016 |
|
RU2643677C1 |
| УСТРОЙСТВО ДЛЯ РАСШИРЕНИЯ ПУЧКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ДЛЯ КОГЕРЕНТНОЙ ПОДСВЕТКИ С НАБОРОМ СВЕТОВОДОВ С ДИХРОИЧНЫМИ ПОКРЫТИЯМИ | 2020 |
|
RU2757071C1 |
| СПОСОБ ФОКУСИРОВКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2018 |
|
RU2685573C1 |




Изобретение относится к области измерительной техники и касается многофункционального оптического датчика. Датчик содержит по меньшей мере одну пару, состоящую из источника излучения и соответствующего ему приемника излучения, и оптическую схему, включающую в себя коллимирующий элемент, первый оптический элемент и второй оптический элемент. Первый оптический элемент и второй оптический элемент включают в себя отражающую поверхность и соединены между собой общей поверхностью, причем общая поверхность представляет собой полупрозрачную поверхность. Датчик может быть использован в качестве микрофона, датчика пыли, лидара, датчика PPG (фотоплетизмограмма). Технический результат заключается в уменьшении размеров, обеспечении возможности использования датчика в составе мобильных устройств и расширении функциональных возможностей. 4 н. и 25 з.п. ф-лы, 20 ил.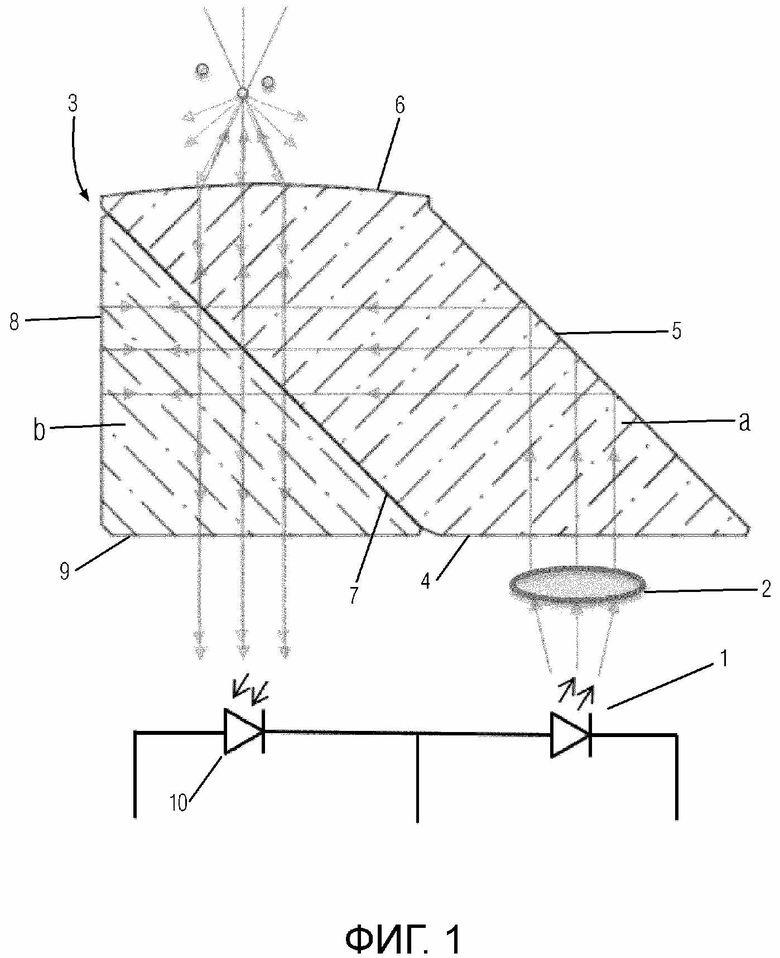
1. Многофункциональный оптический датчик, содержащий:
по меньшей мере одну пару, состоящую из источника излучения и соответствующего ему приемника излучения;
оптическую схему, включающую в себя коллимирующий элемент, первый оптический элемент, второй оптический элемент;
причем:
коллимирующий элемент выполнен с возможностью коллимации излучения от источника излучения;
первый оптический элемент и второй оптический элемент соединены между собой общей поверхностью, причем общая поверхность представляет собой полупрозрачную поверхность;
первый оптический элемент содержит:
- входную поверхность для приема излучения,
- отражающую поверхность первого оптического элемента для отражения излучения, прошедшего через входную поверхность, и направления отраженного излучения на полупрозрачную поверхность,
причем полупрозрачная поверхность выполнена с возможностью разделения излучения от отражающей поверхности первого оптического элемента на опорное излучение и рабочее излучение;
- рабочую поверхность для вывода рабочего излучения, отраженного от полупрозрачной поверхности, и приема излучения, отраженного от объекта или рассеянного объектом;
второй оптический элемент содержит:
- отражающую поверхность второго оптического элемента для отражения опорного излучения, прошедшего через полупрозрачную поверхность,
- выходную поверхность для вывода опорного излучения и излучения, отраженного от объекта или рассеянного объектом, к приемнику излучения, соответствующему источнику излучения; и
причем все источники излучения и приемники излучения расположены в одной плоскости.
2. Многофункциональный оптический датчик по п. 1, в котором коллимирующий элемент интегрирован с источником излучения.
3. Многофункциональный оптический датчик по п. 1, в котором коллимирующий элемент интегрирован с первым оптическим элементом.
4. Многофункциональный оптический датчик по п. 1, в котором рабочая поверхность выполнена с возможностью фокусировки рабочего излучения.
5. Многофункциональный оптический датчик по п. 4, в котором рабочая поверхность выполнена в виде сферической линзы или асферической линзы.
6. Многофункциональный оптический датчик по п. 1, в котором рабочая поверхность выполнена плоской.
7. Многофункциональный оптический датчик по любому из пп. 1-6, в котором по меньшей мере одним источником излучения является вертикально излучающий лазер (VCSEL).
8. Многофункциональный оптический датчик по любому из пп. 1-6, в котором выходная поверхность выполнена с возможностью фокусировки выходного излучения.
9. Многофункциональный оптический датчик по п. 3, в котором коллимирующий элемент интегрирован с отражающей поверхностью первого оптического элемента и выполнен в виде внеосевого параболического зеркала.
10. Многофункциональный оптический датчик по любому из пп. 1-6, в котором коллимирующий элемент выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE).
11. Многофункциональный оптический датчик по п. 4, в котором на рабочую поверхность нанесен дифракционный оптический элемент (DOE) или голографический оптический элемент (HOE).
12. Многофункциональный оптический датчик по п. 1, в котором коллимирующий элемент выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE), нанесенного на входную поверхность первого оптического элемента.
13. Многофункциональный оптический датчик по любому из пп. 1-6, 9, 11, 12, в котором каждая из по меньшей мере одной пары, состоящей из источника излучения и соответствующего ему приемника излучения, работают на предопределенной длине волны.
14. Многофункциональный оптический датчик по любому из пп. 1-6, дополнительно содержащий четвертьволновую пластинку, встроенную во входную поверхность первого оптического элемента, причем по меньшей мере один источник излучения является лазером с фиксированной поляризацией.
15. Многофункциональный оптический датчик, содержащий:
по меньшей мере одну пару, состоящую из источника излучения и соответствующего ему приемника излучения;
оптическую схему, включающую в себя коллимирующий элемент, первый оптический элемент, второй оптический элемент, причем:
коллимирующий элемент выполнен с возможностью коллимации излучения от источника излучения;
первый оптический элемент и второй оптический элемент соединены между собой общей поверхностью, причем общая поверхность представляет собой полупрозрачную поверхность;
первый оптический элемент содержит
- поверхность ввода/вывода для:
ввода излучения от источника излучения и направления к полупрозрачной поверхности, причем полупрозрачная поверхность выполнена с возможностью разделения излучения, введенного через поверхность ввода/вывода, на опорное излучение и рабочее излучение;
вывода опорного излучения и излучения, отраженного от объекта или рассеянного объектом, к приемнику излучения;
- отражающую поверхность первого оптического элемента для направления опорного излучения, отраженного от полупрозрачной поверхности, и излучения, отраженного от объекта или рассеянного объектом, к поверхности ввода/вывода для вывода из оптической схемы к приемнику излучения;
второй оптический элемент содержит:
- рабочую поверхность для вывода рабочего излучения, прошедшего через полупрозрачную поверхность, и приема излучения, отраженного от объекта или рассеянного объектом,
- отражающую поверхность для направления излучения, отраженного от объекта или рассеянного объектом, через полупрозрачную поверхность к отражающей поверхности первого оптического элемента; и
причем все источники излучения и приемники излучения расположены в одной плоскости.
16. Многофункциональный оптический датчик по п. 15, в котором коллимирующий элемент интегрирован с источником излучения.
17. Многофункциональный оптический датчик по п. 15, в котором коллимирующий элемент интегрирован с первым оптическим элементом.
18. Многофункциональный оптический датчик по п. 15, в котором рабочая поверхность выполнена с возможностью фокусировки рабочего излучения.
19. Многофункциональный оптический датчик по п. 18, в котором рабочая поверхность выполнена в виде сферической линзы или асферической линзы.
20. Многофункциональный оптический датчик по п. 15, в котором рабочая поверхность выполнена плоской.
21. Многофункциональный оптический датчик по любому из пп. 15-20, в котором по меньшей мере одним источником излучения является вертикально излучающий лазер (VCSEL).
22. Многофункциональный оптический датчик по п. 15, в котором поверхность ввода/вывода выполнена с возможностью фокусировки выходного излучения.
23. Многофункциональный оптический датчик по любому из пп. 15-20, в котором коллимирующий элемент выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE).
24. Многофункциональный оптический датчик по п. 18, в котором на рабочую поверхность нанесен дифракционный оптический элемент (DOE) или голографический оптический элемент (HOE).
25. Многофункциональный оптический датчик по п. 15, в котором коллимирующий элемент выполнен в виде дифракционного оптического элемента (DOE) или голографического оптического элемента (HOE), нанесенного на поверхность ввода-вывода первого оптического элемента.
26. Многофункциональный оптический датчик по любому из пп. 15-20, 22, 24, 25, в котором каждая из по меньшей мере одной пары, состоящей из источника излучения и соответствующего ему приемника излучения, работают на предопределенной длине волны.
27. Многофункциональный оптический датчик по п. 15, в котором коллимирующий элемент интегрирован с отражающей поверхностью первого оптического элемента и выполнен в виде внеосевого параболического зеркала.
28. Применение многофункционального оптического датчика по любому из пп. 1-14 в качестве микрофона, датчика пыли, лидара, датчика PPG (фотоплетизмограмма).
29. Применение многофункционального оптического датчика по любому из пп. 15-27 в качестве микрофона, датчика пыли, лидара, датчика PPG (фотоплетизмограмма).
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 4671613 A1, 09.06.1987 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Четырехлучевой поляризационный интерферометр | 1976 |
|
SU558579A1 |

