Изобретение относится к области медицины, в частности к реаниматологии и интенсивной терапии, а также к медицинской технике и может быть использовано для искусственной вентиляции легких (ИВЛ) в отделениях реанимации и интенсивной терапии, в машинах скорой помощи.
Аппарат ИВЛ (ЭММИД-ЧС) - электромеханический мобильный модульный с прямым измерением давления удобен для укомплектования бригад реанимации в условиях чрезвычайных ситуаций (ЧС). В основе конструкции аппарата ЭММИД-ЧС использован дыхательный комплект «Амбу».
Из уровня техники известны аппараты ИВЛ, использующие дыхательные комплекты типа мешка «Амбу» для выполнения экстренного вентилирования легких, применяемые к пациентам с нарушением дыхания в условиях недоступности реанимационного оборудования.
Так известен аппарат искусственной вентиляции легких с ручным приводом первой помощи по ТУ 9444-169-17493159-2002, регистрационное удостоверение №ФСР 2010/08608, к-т регистрационной документации КРД №56251 от 25.08.2010, разрешенный к производству и применению на территории РФ приказом Росздравнадзора №9514-Пр/10 от 21.09.2010 г.
Известен также мешок дыхательный реанимационный APEXMED, Нидерланды; регистрационное удостоверение №ФСЗ 2011/10188 от 21.07.2011, допущенный к обращению на территории РФ приказом Росздравнадзора №4441-Пр/11 от 21.07.2011 г. и приказом от 08.06.2016 г. №5105 о замене. Прототипом такого аппарата ручной ИВЛ типа мешка «Амбу» служит концепция первого в мире ручного аппарата для искусственной вентиляции легких, предложенная в 1953 г. немецким доктором Хольгером Гессеном (Dr. Holger Hesse) и датским анестезиологом Хеннингом Рубеном (Henning Ruben). Это сумка-помпа, содержащая в пластичном корпусе медицинские клапанные системы и гибкую лицевую маску для фиксации на дыхательных путях пациента.
Принцип работы мешка «Амбу»: при сжатии вентилирующего мешка происходит нагнетание воздуха в легкие пациента, насыщая легкие кислородом. При этом нереверсивный дыхательный клапан препятствует попаданию выдыхаемого воздуха назад в мешок. Затем, при освобождении, мешок самостоятельно расправляется, восстанавливая форму, в результате чего происходит всасывание окружающего воздуха с клапана, находящегося с обратной стороны мешка. Далее цикл повторяется.
Основными достоинствами такого способа и аппарата является простота, доступность, легкость развертывания и низкая стоимость.
К техническим достоинствам относится:
- конструкция клапанной крышки позволяет разделять воздушные потоки и направлять выдох больного в сторону от врача;
- возможность регулирования давления на выдохе с помощью съемного клапана PEEP (Positive End Expiratory Pressure) - ПДКВ [положительным давлением в конечной точке выдоха] - (для взрослого пациента от 5 до 20 гПа), что способствует максимальному открытию альвеол пациента;
- ограничение максимального вдоха предохранительным клапаном (для взрослого пациента/ребенка 60/40 гПа) с возможностью его кратковременной блокировки.
Недостатком такого и подобных устройств является быстрая утомляемость медицинских работников, необходимость непрерывного участия медицинского работника в ИВЛ каждого пациента. К недостаткам также относится: отсутствие какого-либо мониторинга доставляемого объема воздуха и контроля давления в дыхательных путях.
Известны предложения по автоматизации работы дыхательного комплекта «Амбу».
Например, в материалах конференции DMD2010 13-15 апреля 2010 года, Миннеаполис, Миннесота, США DMD2010-3 845: «Design and Prototyping of a Low-cost Portable Mechanical Ventilator» по дизайну и прототипированию низкостоимостных мобильных механических аппаратов ИВЛ, проведено экономическое обоснование концепции автоматизации ручной ИВЛ типа «Амбу», предложены концепции автоматизации механизма сжатия «Амбу». Предложены концепции: роликовой реверсивной цепи, сжимающей «Амбу»; вращающегося кулачка эксцентрикового типа, воздействующего на корпус «Амбу» и создающего его повторяемую деформацию. Проведены исследования этих способов и определены основные параметры приводов и основные выходные параметры ИВЛ.
Известен также патент США US 2011/0041852 А1, дата опубликования: 24 февраля 2011 г., в котором возможность проведения искусственной вентиляции легких пациента обеспечивается посредством автоматизированного циклического механического сжатия мешка «Амбу» посредством привода, управляемого электронным блоком, с возможностью настройки и автоматического поддержания параметров сжатия (прежде всего амплитуды и частоты сжатия) и в этом его главное преимущество перед ручным методом.
К недостаткам аналога, описанного в патенте US 2011/0041852 А1, следует отнести отсутствие прямого контроля создаваемого противодавления в легких пациента, а также сложность и немалая стоимость установки опционально предлагаемых внешних датчиков.
Известен способ компрессии с помощью надувной компрессионной манжеты, накладываемой на мягкие ткани конечности человека, и обеспечивающей как равномерное сжатие этих тканей, так и расположенных в них кровеносных сосудов, предложенный в 1896 г. итальянским врачом Сципионе Рива-Роччи (Scipione Riva-Rocci) для измерения артериального давления. При этом не инвазивном способе, давление, создаваемое в мягких тканях человека, измеряется по манометру, соединенному трубкой с компрессионной манжетой, в которой создается измеряемое давление. Основанный на законе Паскаля и используемый в известном способе принцип измерения давления в сдавливаемой оболочке, был использован при разработке заявляемого аппарата ИВЛ ЭММИД-ЧС. При этом в качестве надавливающей компрессионной манжеты, в заявляемом аппарате ИВЛ ЭММИД-ЧС используется «измерительный» мешок комплекта «Амбу», давление в котором создается механическим нажатием на него и измеряется манометром, а в качестве оболочки в которой измеряется давление, выступает «вентиляционный» мешок комплекта «Амбу», соединенный с легкими человека дыхательной трубкой.
Технический результат, достигаемый изобретением, заключается в расширении функциональных возможностей аппарата ИВЛ за счет автоматизации циклического механического сжатия мешка комплекта «Амбу», обеспечении контроля давления ИВЛ при каждом цикле, и обеспечении возможности настройки параметров цикла ИВЛ.
В отличие от аналога (US 2011/0041852 А1), который предусмотривает возможности опционального крепления внешнего сложного по преобразованиям и соответственно дорогостоящего датчика давления на сжимающих элементах, механической конструкции устройства и/или закрепления на внешней стороне сжимаемого мешка комплекта «Амбу», используемого для ИВЛ пациента, не конкретизированного патентом датчика давления, - конструкция заявленного ИВЛ ЭММИД-ЧС позволяет использовать при создании автоматизированных циклов сжатия не один, а два мешка комплектов «Амбу», один из которых является «вентилирующим» и подключается к легким пациента, а другой является «измерительным», перемещается вместе с подвижным элементом электромеханического циклического линейного привода, непосредственно контактирует и надавливает на «вентилирующий» мешок при каждом цикле и служит для мониторинга, непосредственно по манометру и/или датчику давления, в режиме реального времени противодавления, возникающего в легких пациента. Для качественного измерения давления ИВЛ материал и конструкция вентиляционных мешков, входящих в комплекты «Амбу» (30) и (31) должны быть одинаковы.
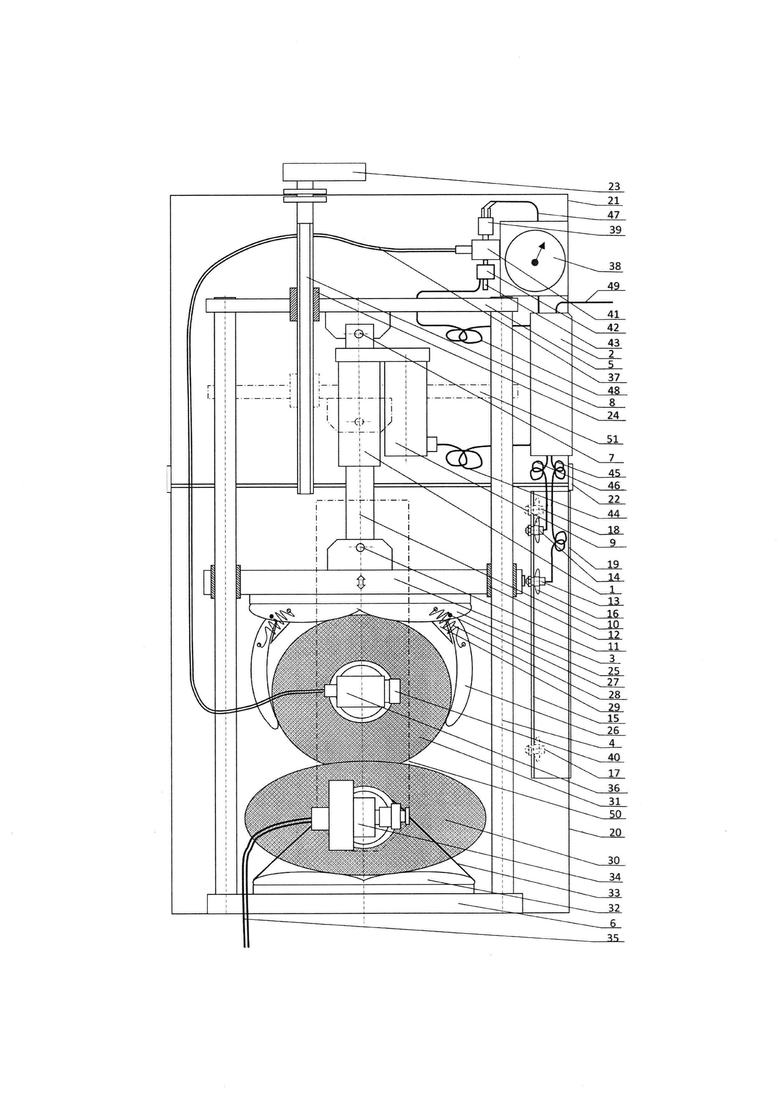
Аппарат искусственной вентиляции легких включает следующие элементы:
1. - электромеханический линейный привод,
2. - электронный блок управления
3. - нажимная плита,
4. - направляющие (две параллельные, вторая не пронумерована),
5. - верхняя плита,
6. - нижняя неподвижная плита - основание,
7. - ось крепления корпуса линейного привода
8. - установочный винт,
9. - электродвигатель,
10. - шток линейного привода,
11. - ось крепления штока линейного привода,
12. - блок линейных подшипников,
13. - бесконтактный концевой выключатель - нижний,
14. - бесконтактный концевой выключатель - верхний,
15. - направляющая для регулировки положения концевых выключателей,
16. - фиксирующая гайка с «барашком» (две параллельные, вторая не пронумерована),
17. - нижнее положение концевого выключателя - нижнего 13,
18. - верхнее положение концевого выключателя - верхнего 14,
19. - крышка кожуха для отсека концевых выключателей,
20. - кожух аппарата ИВЛ, состоящий из двух разъемных частей «П»-образной формы, имеющих съемные боковыми стенки, которые условно показаны прозрачными,
21. - верхняя съемная часть кожуха,
22. - защелка кожуха (вторая защелка не пронумерована),
23. - ручка установочного винта,
24. - резьбовая гайка установочного перемещения верхней плиты 5,
25. - съемная магнитная накладка нажимной плиты 3,
26. - поворотные держатели ((два параллельно расположенных, второй не пронумерован),
27. - оси поворотных держателей 26 (вторая ось не пронумерована),
28. - пружина (вторая пружина не пронумерована),
29. - ограничитель поворота держателя 26 (второй ограничитель не пронумерован),
30. - первый комплект «Амбу» с «вентилирующим» мешком, выполняющем функцию ИВЛ, с блоками клапанов и дыхательными трубками.
31. - второй комплект «Амбу» с «измерительным» мешком, выполняющем функцию измерительной манжеты, изготовленный из качественного силикона и других современных материалов,
32. - съемная магнитная накладка нижней неподвижной плиты-основания 6,
33. - фиксирующий ремень,
34. - блок нереверсивного дыхательного клапана и клапана ограничения давления,
35. - дыхательная трубка,
36. - переходник к комплекту «Амбу» 31,
37. - трубка,
38. - манометр низкого давления,
39. - датчик низкого давления,
40. - заглушка к переходнику 36,
41. - тройник, для параллельного подключения манометра 38, датчика низкого давления 39 и электромагнитного пневмоклапана 42,
42. - электромагнитный пневмоклапан,
43. - выпускной порт элетромагнитного пневмоклапана,
44. - электрический кабель электромеханического линейного привода 1,
45. - электрический кабель бесконтактного концевого выключателя 13,
46. - электрический кабель бесконтактного концевого выключателя 14,
47. - электрический кабель датчика низкого давления 39,
48. - электрический кабель элетромагнитного пневмоклапана 42,
49. - электрический кабель питания аппарата ИВЛ,
50. - конструктивный вырез на торцевой стенке кожуха 20 (показана условно прозрачной),
51. - промежуточное положение верхней плиты 5 при проведении регулировки ее положения.
Принцип работы аппарата, поясняется представленной схемой аппарата ИВЛ на чертеже.
Электромеханический линейный привод 1, например: CASM - 32 - BS -0100AM-000+BG45X30PI+ZBE-375573+ZBE-375506-32+ZBE-375511-32, SKF/EWELLIX; DGREC-52-T5-U-S250-L100-F0.2-PXXX-il / stepper motor/ 100% duty cycle, DGR electric cylinder, управляемый от электронного блока 2, осуществляет возвратно-поступательное перемещение вверх - вниз нажимной плиты 3 вдоль направляющих 4, относительно верхней плиты 5 и неподвижной нижней плиты-основания 6, связанных между собой цилиндрическими хромированными направляющими 4. Корпус линейного привода с помощью оси 7 связан с верхней плитой 5. Положение верхней плиты 5, которая неподвижна при работе аппарата, и соответственно оси 7, может быть отрегулировано при подготовке аппарата к работе с помощью установочного винта 8. В состав электромеханического линейного привода 1 входит электродвигатель 9, вращение которого с помощью встроенного в корпус линейного привода редуктора приводит к перемещению штока 10, связанного своей осью 11 с нажимной плитой 3. Нажимная плита 3 базируется на параллельных друг другу направляющих 4 с помощью линейных подшипников 12, обеспечивающих плоскопараллельное перемещение плиты и малый коэффициент трения в направляющих, что предотвращает отсутствие рывков при движении. Реверс направления вращения электродвигателя 9 и соответственно направления движения штока 10 линейного привода 1 и связанной с ним плиты 3, осуществляется при срабатывании бесконтактных концевых выключателей 13, 14, например: LA08M-45.2P1.U1.K, KIPPRIBOR/КипПрибор, положение которых вдоль оси направления движения плиты 3, задаваемой направляющими 4 может быть оперативно отрегулировано при наладке цикла ИВЛ вдоль направляющей 15 посредством отпускания и затягивания в нужном положении фиксирующих гаек («с барашком») 16, например ГАЙКА М8Х1,0 БАРАШЕК ГОСТ 3032-76, от нижнего положения 17, показанного на схеме для концевого выключателя 13, до верхнего положения 18, показанного на схеме для концевого выключателя 14. Регулировка положения концевых выключателей осуществляется через открытую крышку 19 на кожухе аппарата 20, имеющем верхнюю съемную часть 21, связанную с нижней частью кожуха защелками 22. Установочный винт 8 регулировки положения верхней плиты 5, может свободно поворачиваться в опоре верхней съемной части кожуха 21. Для поворота винта предусмотрена ручка 23, при вращении которой резьбовая гайка 24, неподвижно закрепленная на плите 5, поступательно движется вдоль винта вниз при вращении ручки 23 против часовой стрелки и вверх - при вращении ручки 23 по часовой стрелке. Совместно с резьбовой гайкой 24 происходит установочное перемещение плиты 5 вдоль направляющих 4.
Нажимная плита 3 оснащена съемной магнитной накладкой 25, имеющей два поворотных держателя 26, каждый из которых может свободно вращаться относительно оси 27 и оснащен пружиной 28, которая с небольшим усилием поджимает его к ограничителю 29.
Нажимная плита 3 передает движение сжатия и освобождения на оболочку мешка первого комплекта «Амбу» 30 через оболочку мешка второго комплекта «Амбу» 31, установленного в подпружиненные поворотные держатели 26, на съемной магнитной накладке 25 нажимной плиты 3.
Ограничитель 29 устанавливается таким образом, чтобы усилие пружины не передавалось от поворотного держателя к фиксируемому им мешку комплекта «Амбу» 31.
Мешок комплекта «Амбу» 31, выполняет функцию «измерительной манжеты» и условно назван «измерительным». Оболочка «измерительного» мешка комплекта «Амбу» 31 при движении плиты 3 непосредственно воздействует на оболочку мешка первого комплекта «Амбу» 30, который выполняет функцию ИВЛ и условно назван «вентилирующим».
«Вентилирующий» мешок комплекта «Амбу» 30 предварительно фиксируется на съемной магнитной накладке 32 неподвижной плиты-основания 6, с помощью фиксирующих ремней 33. Комплект «Амбу» 30 предназначен для ИВЛ пациента, его «вентилирующий» мешок подключается через входящий в этот комплект «Амбу» блок нереверсивного дыхательного клапана и клапана ограничения давления 34 к дыхательной трубке 35, и далее посредством дыхательных комплектных трубок подключается к лицевой маске или эндотрахеальной трубке пациента (на чертеже не показаны).
Перед началом работы от «измерительного» мешка комплекта «Амбу» 31 должен быть отсоединен входящий в его комплект блок нереверсивного дыхательного клапана с клапаном ограничения давления 34 и взамен него устанавливается входящий в комплект аппарата переходник 36 под трубку 37 для подсоединения манометра 38 и датчика давления 39. Переходник имеет также патрубок с заглушкой 40 для выравнивания давления с атмосферным. После выравнивания давления заглушка 40 плотно закрывается, замыкая внутренний объем «измерительного» мешка комплекта «Амбу» 31 (на котором с противоположной стороны остается присоединенным впускной клапан, входящий в стандартный комплект поставки комплекта «Амбу»). Давление в «измерительном» мешке комплекта «Амбу» 31, оболочка которого при движении нажимной плиты 3 непосредственно воздействует на «вентилирующий» мешок комплекта «Амбу» 30, контролируется по манометру низкого давления 38, например: КМ-12Т (0-10кПа; 0…100 мбар/см. Н2О) М12х1,5.1,51Р54; ЗАО «РОСМА» и опционально контролируется датчиком давления 39, например: DMP343 100-0600-3-U-M00-C00-00R; BD SENSORS RUS (БД СЕНСОРС РУС). Подсоединение манометра и датчика осуществляется посредством входящей в «измерительный» комплект «Амбу» 31 кислородной трубки 37, подключенной к переходнику 36 мешка комплекта «Амбу» 31 и тройнику 41 к которому подключен электромагнитный пневмоклапан, например, нормально закрытый выпускной воздушный клапан CJAV08-2B05A1 или клапаны для электронных тонометров JQF4 - 6A /YYV1 - 6А1 (нормально открытые), предпочтительнее использовать нормально закрытый пневмоклапан, управляемый электронным блоком управления 2 для автоматизации коррекции давления в мешке комплекта «Амбу» 31 при автоматической работе аппарата, без остановки цикла ИВЛ. При подаче на катушку клапана рабочего напряжения для нормально закрытого клапана (или при снятии напряжения для нормально открытого клапана) происходит открытие клапана и соединение замкнутого в мешке комплекта «Амбу» 31 объема с атмосферой через выпускной порт 43 электромагнитного пневмоклапана 42. В программу управления контроллера электронного блока управления 2, введен периодически выполняемый корректирующий цикл, например 1 раз в течение 10 мин циклической работы прибора (при наладке это время может быть изменено). В ходе корректирующего цикла, после завершения предшествующего его цикла ИВЛ, производится отвод плиты 3 до отсутствия контакта мешков комплектов «Амбу» 31 и 30 между собой, далее кратковременно подается электропитание на катушку управления пневмоклапана 42, происходит выравнивание давления внутри мешка комплекта Амбу 31 с атмосферным и контролируется обнуление величины избыточного давления, измеренного с помощью датчика низкого давления 39. Далее питание с катушки управления пневмоклапана 42 снимается, корректирующий цикл заканчивается и возобновляется воспроизведение запрограммированных циклов ИВЛ, например, с поддержанием давления на вдохе. Электромагнитный пневмоклапан 42 может быть встроен в переходник мешка комплекта «Амбу» 31. В заявляемой конструкции аппарата предусмотрена возможность выравнивания давления в мешке комплекта «Амбу» 31 с атмосферным вручную, для компенсации создания избыточного давления в мешке комплекта «Амбу» 31, вследствие нагрева оболочки мешка и воздуха в оболочке при длительной циклической работе аппарата, что приводит к погрешности измерения давления ИВЛ, путем снятия заглушки 40 при полностью отведенной плите 3 и отсутствии контакта мешков комплектов «Амбу» 30 и 31 между собой при кратковременной остановке цикла. Манометр 38 имеет контрольные метки рабочего диапазона давлений ИВЛ и (при необходимости) вторую шкалу, нанесенную с учетом компенсации систематической погрешности измерения давления ИВЛ (заказываются у производителя манометра, как предусмотренная опция). Величина систематической погрешности измерения и необходимость заказа манометра с компенсационной шкалой определяется на этапе испытания опытных образцов предлагаемого аппарата. Аналогичные поправки могут быть введены разработчиком в программе контроллера блока управления аппарата 2 на показания датчика давления 39. Давление в «измерительном» мешке комплекта «Амбу» 31 перед началом работы, при отведенном линейном приводе должно быть обязательно выровнено с давлением внешней среды, а затем заглушка 40 патрубка выравнивания давления должна быть герметично закрыта. Возможно предварительное наполнение измерительного мешка комплекта «Амбу» 31 техническим азотом для компенсации температурных изменений давления, с оснащением этого мешка дополнительными элементами. Целесообразность и эффективность такого наполнения определяется в ходе испытаний опытных образцов изделия.
Электронный блок управления 2 позволяет предварительно настроить параметры движения электромеханического линейного привода 1 и управлять пуском и остановом привода при движении в оба направления. Электронный блок управления 2 связан электрическими кабелями управления со следующими устройствами аппарата: кабелем 44 - с электромеханическим линейным приводом 1, кабелем 45 - с бесконтактным концевым выключателем 13, кабелем 46 - с бесконтактным концевым выключателем 14, кабелем 47 - с датчиком низкого давления 39. кабелем 48 -с электромагнитным пневмоклапанном 42. Питание блока управления 2 осуществляется через кабель 49 (входит в комплект поставки прибора) от внешнего источника безопасного напряжения постоянного тока 12 В=(например бортовая сеть электропитания автомобиля скорой помощи, аккумуляторная батарея и др.) или внешним блоком питания: 12 В=/220 В, 50 Гц (не входит в комплект поставки аппарата). Возможно исполнение аппарата на напряжение 24 В = или 220 В, 50 Гц. После запуска цикла ИВЛ электронный блок управления 2 формирует управляющие сигналы на электромеханический линейный привод 1, осуществляя его разгон до предварительно заданной скорости, замедление и останов при срабатывании концевых выключателей 13 и 14 и реверс направления движения, то в сторону сжатия, то в сторону освобождения «вентилирующего» мешка комплекта «Амбу» 30. При использовании шагового электродвигателя 9 в линейном приводе 1 (определяется конструктивным исполнением аппарата), что является предпочтительным с точки зрения функциональности, возможно задание требуемой амплитуды перемещения (количества выполняемых в обе стороны движения шагов управления для электродвигателя) и соответственно объема нагнетаемого при каждом цикле ИВЛ воздуха непосредственно с сенсорной панели электронного блока управления 2. При этом требуемое перемещение может быть задано в миллиметрах, которое электронный блок управления 2 пересчитывает в шаговое управление электродвигателем 9. При таком управлении электродвигателем 9 положение концевого выключателя 13 может задавать ограничение максимального перемещения линейного привода 1 в сторону сжатия «вентилирующего» мешка комплекта «Амбу» 30, а положение концевого выключателя 14 будет задавать исходное положение линейного привода 1, от которого электронный блок управления 2 совершает отсчет перемещения. Исходное положение должно быть настроено таким образом, чтобы обеспечить отвод линейного привода для освобождения «вентилирующего» мешка комплекта «Амбу» 30 при котором происходит его гарантированное заполнение воздухом перед началом следующего цикла сжатия. Поступающий в электронный блок управления 2 сигнал от датчика низкого давления 39, при включении обслуживающим медперсоналом режима автоматического управления, может быть задействован, как для автоматического ограничения амплитуды перемещения при достижении определенной величины давления, так и для ее увеличения (в пределах величины рабочего хода электромеханического линейного привода 1, заданной положением концевых выключателей 13 и 14) при недостаточной величине давления; позволяет реализовать ИВЛ с управлением, как по давлению, так и по объему, с контролем показателя податливости легких и грудной стенки - статического торакопульмонального комплайнса (Cst) и контролем связанного с ним давления в дыхательных путях (Р). Контроль этого расчетного параметра может осуществляться управляющим контроллером электронного блока управления 2 и необходим для обеспечения эффективности и адекватности проводимой ИВЛ состоянию пациента. Расчетный показатель податливости легких, Cst, вычисляется путем деления введенного в легкие объема газа (который рассчитывается исходя из величины перемещения линейного привода с учетом коэффициентов, определяемых формой геометрии мешка комплекта «Амбу») на потребовавшееся для этого давление (определяемое по показаниям датчика низкого давления 39), и выражается в мл⋅см вод. ст.-1. [см. Журнал "Интенсивная терапия" N2 - 2008 г., М.Б. Конторович, Б.Д. Зислин: «Мониторинг параметров механики дыхания при искусственной вентиляции легких», http://icj.ru/journal/number-2-2008/162-monitoring-parametrov-mehaniki-dyhaniya-pri-iskusstvennoy-ventilyacii-legkih.html].
При снижении максимального показания датчика низкого давления 39 в ходе каждого цикла ИВЛ ниже определенной, настраиваемой величины, а также при критическом изменении параметра Cst включается свето-звуковая сигнализация.
Электронный блок управления 2 также может быть переведен обслуживающим медперсоналом в ручной режим управления, с отключением корректирующего влияния датчика низкого давления 39. В ручном режиме сохраняется возможность визуального контроля давления по манометру низкого давления 38.
Конструктивный вырез 50, на показанной условно прозрачной торцевой стенке кожуха 20, обеспечивает возможность быстрого доступа обслуживающего медперсонала к блоку нереверсивного дыхательного клапана и клапана ограничения давления 34 и месту присоединения к нему дыхательной трубки 35 на «вентилирующем» мешке комплекта «Амбу» 30. Предусмотренная в заявленном аппарате регулировка исходного положения неподвижной плиты 5 (на чертеже показано промежуточное положение 51 при проведении регулировки ее положения) обеспечивает универсальность при комплектовании аппарата ИВЛ электромеханическим линейным приводом 1 с различной величиной хода и позволяет обеспечить широкий диапазон регулировки при настройке.
Представленный на схеме аппарата ИВЛ (см. чертеж) электромеханический линейный привод 1 имеет конструктивное исполнение в виде «электроцилиндра» с выдвижным штоком 10 и вынесенным в боковом направлении приводным электродвигателем 9, с расположением оси приводного вала параллельно перемещаемому штоку 10, на некотором расстоянии от него. Применение такого конструктивного исполнения позволяет обеспечить максимальную компактность аппарата вдоль оси перемещения подвижной части аппарата.
Основные эксплуатационные требования, предъявляемые к электромеханическому линейному приводу 1 - возможность непрерывной работы в течение длительного промежутка времени, то есть 100% продолжительность цикла (отношение времени работы, к общему времени цикла, включая время паузы между включениями); гарантируемый производителем привода линейный пробег, без промежуточного ремонта, который должен составлять, как минимум 3000 километров, исходя из года гарантии на прибор и возможности непрерывной работы с амплитудой до 100 мм и частотой до 30 циклов в минуту (0,4 с минимальное время вдоха и рекомендуемое по отношению к нему 4-х кратное время выдоха). Требования к основным техническим характеристикам электромеханического линейного привода 1 определяются параметрами сжимаемого мешка комплекта «Амбу» 30, обеспечивающего поддержание необходимых параметров ИВЛ: рабочий ход электромеханического линейного привода 1 до 100 мм (максимальный ход, с учетом отвода подвижной плиты 3, выбирается в диапазоне 100…300 мм); максимальная скорость перемещения 150…250 мм/с; рабочее осевое усилие 8…15 кг.Анализ существующих типов и конструкций электромеханических линейных приводов показывает, что такими характеристиками обладают приводы, в состав которых в качестве линейного движителя входит шарико-винтовая пара (ШВП), обеспечивающая минимальный коэффициент трения, минимальные потери энергии при движении и соответственно минимальный нагрев при непрерывной работе с высокими скоростями.
В составе электромеханического линейного привода 1 в конструктивном исполнении аппарата, показанном на схеме (см. чертеж) ШВП продольного перемещения расположена внутри подвижного полого штока 10.
Аппарат ИВЛ ЭММИД-ЧС является мобильным переносным аппаратом и поставляется в переносном кофре/сумке с плечевым ремнем и ручками, имеющем внутренние отделения для 2-х комплектов «Амбу».
Таким образом, модульный принцип построения конструкции аппарата ИВЛ ЭММИД-ЧС на базе типовых низко затратных комплектующих изделий позволяет в короткие сроки наладить серийное производство аппарата в условиях близких к ЧС. Благодаря простоте способа измерения давления, реализованного в конструкции аппарата, низкой ожидаемой стоимости его изготовления, а также наличия самой функции контроля давления, которая необходима для эффективной контролируемой вентиляции легких, аппарат может быть востребован в экстремальных ситуациях для укомплектования мобильных бригад реанимации, полевых военных госпиталей и т.п.
Заявитель просит рассмотреть представленные материалы заявки «Аппарат искусственной вентиляции легких» на предмет выдачи патента РФ на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ И СПОСОБ ИНГАЛЯЦИОННОЙ АНЕСТЕЗИИ | 2019 |
|
RU2729943C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2002 |
|
RU2219892C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2003 |
|
RU2240767C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2008 |
|
RU2357762C1 |
| Аппарат ингаляционного наркоза | 2017 |
|
RU2676654C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2010 |
|
RU2453275C1 |
| НАРКОЗНЫЙ АППАРАТ | 1972 |
|
SU429819A1 |
| Способ ингаляционного воздействия на организм и аппарат для его осуществления | 2016 |
|
RU2708784C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2020 |
|
RU2749760C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛЕГОЧНОГО КРОВОТОКА С ПОМОЩЬЮ ОБМЕНА КИСЛОРОДОМ И ИНЕРТНЫМ ГАЗОМ МЕЖДУ ЛЕГКИМИ И КРОВЬЮ | 1997 |
|
RU2203618C2 |
Изобретение относится к области медицины, а именно к аппарату искусственной вентиляции легких. Аппарат включает первый комплект, снабженный гибким сжимаемым мешком, блоком клапанов и дыхательной трубкой, а также электромеханический линейный привод с программным управлением. Аппарат дополнительно снабжен вторым комплектом, снабженным гибким сжимаемым мешком и переходником, с функцией измерительной манжеты, закрепленным между подпружиненными поворотными держателями на съемной магнитной накладке нажимной плиты, снабженной линейными подшипниками, с возможностью вертикального перемещения вдоль параллельно расположенных направляющих c помощью штока, соединенного с электродвигателем электромеханического линейного привода, связанного с установочным винтом, размещенным в кожухе, который состоит из двух разъемных частей П-образной формы со съемными боковыми стенками. Второй комплект расположен перпендикулярно оси движения линейного привода, параллельно первому комплекту, закрепленному с помощью фиксирующего ремня на съёмной магнитной накладке нижней плиты - основании, связанной с направляющими. Мешок первого комплекта подключен через блок нереверсивного дыхательного клапана и клапана ограничения давления, дыхательную трубку к лицевой маске или эндотрахеальной трубке пациента. Мешок второго комплекта с помощью переходника подключен через тройник параллельно к манометру давления, к датчику давления и к электромагнитному пневмоклапану, которые соединены с электронным блоком управления, соединенным также с бесконтактными концевыми выключателями, нижним, верхним, и электродвигателем. Технический результат, достигаемый изобретением, заключается в расширении функциональных возможностей аппарата ИВЛ, обеспечении контроля давления ИВЛ при каждом цикле и обеспечении возможности настройки параметров цикла ИВЛ. 1 ил.
Аппарат искусственной вентиляции легких, включающий первый комплект, снабженный гибким сжимаемым мешком, блоком клапанов и дыхательной трубкой, а также электромеханический линейный привод с программным управлением, отличающийся тем, что аппарат дополнительно снабжен вторым комплектом, снабженным гибким сжимаемым мешком и переходником, с функцией измерительной манжеты, закрепленным между подпружиненными поворотными держателями на съемной магнитной накладке нажимной плиты, снабженной линейными подшипниками, с возможностью вертикального перемещения вдоль параллельно расположенных направляющих c помощью штока, соединенного с электродвигателем электромеханического линейного привода, связанного с установочным винтом, размещенным в кожухе, который состоит из двух разъемных частей П-образной формы со съемными боковыми стенками, при этом второй комплект расположен перпендикулярно оси движения линейного привода, параллельно первому комплекту, закрепленному с помощью фиксирующего ремня на съёмной магнитной накладке нижней плиты - основании, связанной с направляющими, мешок первого комплекта подключен через блок нереверсивного дыхательного клапана и клапана ограничения давления, дыхательную трубку к лицевой маске или эндотрахеальной трубке пациента, мешок второго комплекта с помощью переходника подключен через тройник параллельно к манометру давления, к датчику давления и к электромагнитному пневмоклапану, которые соединены с электронным блоком управления, соединенным также с бесконтактными концевыми выключателями, нижним, верхним, и электродвигателем.
| АППАРАТ И СПОСОБ ИНГАЛЯЦИОННОЙ АНЕСТЕЗИИ | 2019 |
|
RU2729943C1 |
| 0 |
|
SU189470A1 | |
| NL 2002225 C2, 21.05.2010 | |||
| CN 110035697 A, 19.07.2019 | |||
| WO 2019154839 A1, 15.08.2019. | |||

