Изобретение относится к хирургическому освещению, состоящему из лампы, которая имеет группу источников света, индивидуально размещенных в корпусе, при этом каждый источник света расположен и направлен таким образом, что источник света генерирует луч света (предпочтительно направленный на мнимую горизонтальную плоскость совместного освещения) в возбужденном состоянии; крепежного элемента, который подготовлен для крепления к потолку, стене или полу помещения; а также системы удерживающих рычагов, которая соединяет лампу с возможностью скольжения и/или поворота относительно крепежного элемента.
При известном уровне техники хирургические светильники общего назначения в основном уже известны. Например, US 6 880 957 B2 раскрывает осветительное устройство с электронной компенсацией тени.
Для оптимальной регулировки освещения хирургического светильника требуется, чтобы было известно расстояние между лампой хирургического света и рабочим полем, которое, к примеру, сформировано на опорной поверхности операционного стола. Если во время операции положение лампы изменяется относительно рабочего поля, требуется максимально быстрая регулировка/отслеживание освещения.
Таким образом, уже рассматривалась возможность присоединения датчиков расстояния к хирургическим источникам света для определения прямого расстояния между соответствующей лампой и рабочим полем. Указанные датчики измеряют расстояние между хирургическим освещением и рабочим полем с интервалами и, таким образом, позволяют быстро выполнять перенастройку освещения. Прямое измерение расстояния между хирургическим светильником и операционным полем/световым полем является относительно трудным, поскольку мешающие объекты, такие как голова и руки хирурга, попадают в область определения измерительного поля используемых датчиков расстояния в направлении операционного поля, в то время как хирургическое освещение работает. Зачастую это приводит к ошибочным измерениям, а также к нежелательной перенастройке хирургического освещения.
Таким образом, целью настоящего изобретения является устранение упомянутых недостатков, известных при известном уровне техники, и, в частности, обеспечение хирургического освещения, которое изменяет свои настройку настолько быстро и точно, насколько это возможно, при изменении положения светильника.
В соответствии с изобретением эта цель достигается за счет того, что устройство определения положения сконструировано таким образом, что в рабочем состоянии оно определяет расстояние опорной части светового прибора или системы удерживающего рычага до потолка.
В основном это дает безотказное эталонное измерение для определения расстояния относительно потолка. Такая конструкция делает хирургическое освещение менее восприимчивым к объектам, выступающими впереди операционного поля, и реализовывается практически безотказная работа хирургического освещения.
Дополнительные предпочтительные исполнения заявлены в соответствующих подпунктах и будут подробно описаны ниже.
Когда устройство для определения положения расположено на лампе или в системе удерживающих рычагов, оно может быть технически грамотно интегрировано в хирургический светильник.
Когда устройство для определения положения включает в себя датчик расстояния, конструкция хирургического светильника является особенно простой. В этом случае потолок образует большую площадь, которая особенно легко определяется датчиком расстояния. Затем датчик расстояния устанавливается в хирургический светильник предпочтительно в части (регулируемой по положению/высоте) системы удерживающих рычагов или лампы, которая направлена вверх в пространстве.
Это является особенным преимуществом, когда корпус (лампы) включает в себя изогнутый удлинитель, при этом источники света генерируют световые лучи, которые излучаются в сторону совместного излучения света от корпуса (лампы). Сторона излучения света также упоминается как нижняя сторона лампы. Таким образом, устройство для определения положения является особенно эффективным.
В этом контексте, выгодно, когда устройство для определения положения включает в себя первый датчик расстояния, который расположен на стороне, обращенной от стороны излучения света, т. е. в верхней части корпуса (и, более предпочтительно, ориентирован так, что его область определения измерительного поля была противоположна световым лучам лампы/направлена от световых лучений лампы). Таким образом, конструкция операционного освещения максимально проста, при этом устройство для определения положения технически грамотно интегрировано в светильник.
Когда первый датчик расстояния расположен в области оси (с регулируемой высотой), вокруг которой светильник вращается относительно системы удерживающих рычагов, первый датчик расстояния располагается в положении лампы, в котором она как можно реже закрывается какими-либо предметами, расположенными между ней и потолком.
Когда устройство определения положения включает, в дополнение или в качестве альтернативы первому датчику расстояния, второй датчик расстояния, имеющийся в системе удерживающих рычагов, надежность определения положения светильника дополнительно повышается.
В этом контексте, опять же, полезно, когда второй датчик расстояния расположен на (регулируемом по высоте) универсальном шарнире системы удерживающих рычагов. В этой области расстояние может быть измерено особенно точно, так что восприимчивость определения снижается еще больше.
Кроме того, выгодно, когда устройство для определения положения включает, в дополнение или в качестве альтернативы первому и/или второму датчику расстояния, датчик угла (предпочтительно расположенный в системе удерживающего рычага), который предпочтительно сконструирован и расположен так, чтобы он определял угол/угловое положение рычажной части системы удерживающего рычага с возможностью поворота крепежного элемента (относительно опорной линии/оси). Измерение расстояния дополнительно упрощается путем ссылки на соответствующий угол рычажной части, которая предпочтительно представляет собой регулируемый по высоте пружинный рычаг системы удерживающего рычага.
Преимущество заключается в том, что устройство для определения положения подключено для передачи данных, предпочтительно электрически, к блоку управления, расположенному/размещенному в корпусе светильника. Таким образом, устройство для определения положения расположено близко к блоку управления, поэтому производственные затраты на хирургический светильник дополнительно снижаются.
Когда, в свою очередь, блок управления соединен с источниками света для их управления, чтобы (в рабочем состоянии), по меньшей мере, одна характеристика светильника, такая как размер генерируемого светового поля, цвет света или количество источников питания под напряжением, регулировались в ответ на управляющую команду блока управления, соответствующие характеристики светильника должны контролироваться непосредственно.
Когда блок управления дополнительно запрограммирован так, что он регулирует, по меньшей мере, одну характеристику света в ответ на расстояние между опорной секцией и потолком, определенное с помощью устройства для определения положения в рабочем состоянии хирургического светильника, управление дополнительно упрощается.
Кроме того, блок управления преимущественно соединен с устройством сброса, которое во время работы хирургического источника света позволяет определить целевое состояние хирургического источника света путем определения фактического расстояния относительно потолка и, в то же время, сохраняя по меньшей мере одну/группу отрегулированных световых характеристик светильника. Кроме того, предпочтительно, устройство сброса включает в себя кнопку сброса или устройство ввода речевых команд, такое как громкоговоритель, и, в свою очередь, подключено электрически/для передачи данных к блоку управления. Таким образом, управление хирургическим светильником еще больше упрощается.
Другими словами, во время работы хирургического света в соответствии с настоящим изобретением лампа хирургического источника света изначально оптимально регулируется относительно операционного поля, и, например, задается контрольная точка, т. е. выполняется контрольное измерение потолка. Если расстояние изменяется относительно потолка при сбросе хирургического освещения, параметры освещения/характеристики освещения соответствующим образом отслеживаются и адаптируются/оптимизируются.
Далее изобретение будет подробно проиллюстрировано с помощью чертежа, и в этом контексте также будут описаны различные примерные конструкции.
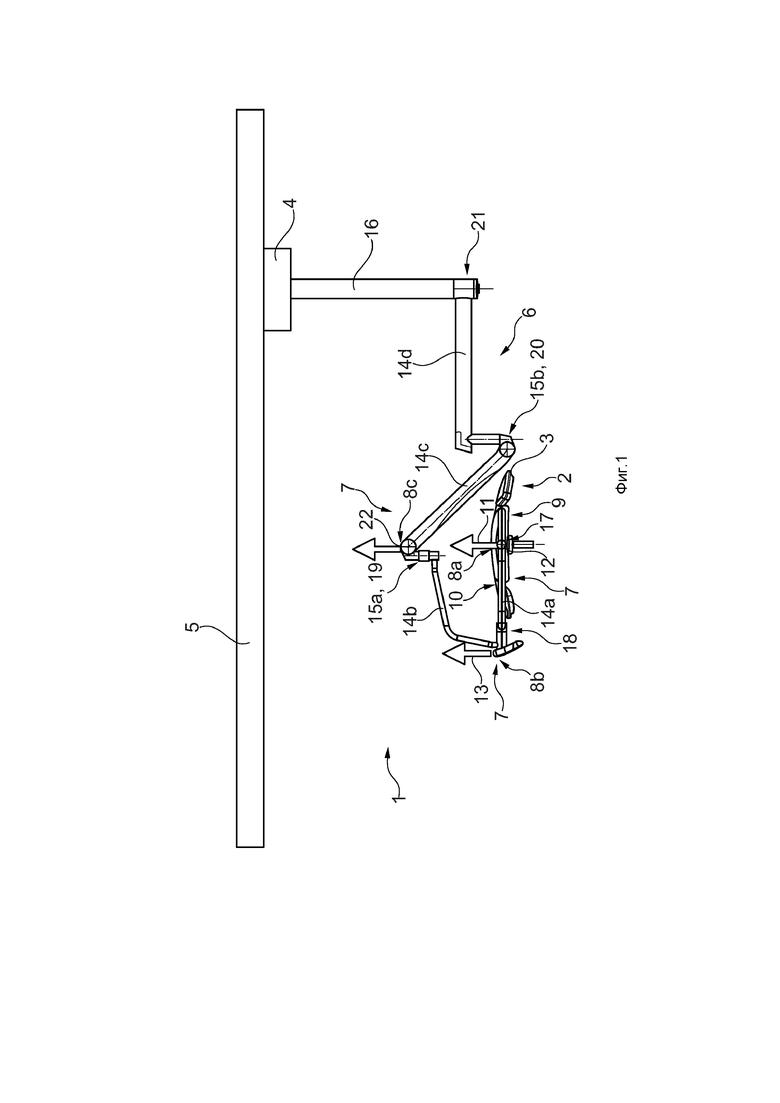
На Фигуре 1 показан вид сбоку хирургического источника света в соответствии с изобретением согласно предпочтительной примерной конструкции, в которой различные возможные положения устройства для определения положения схематично представлены в системе удерживающего рычага, а также в лампе хирургического светильника. Фигура является лишь схематической и служит исключительно для понимания изобретения.
На Фигуре 1 показан хирургический светильник 1, представленный в примерной конструкции в соответствии с изобретением. Хирургический светильник 1 подготовлен для крепления к потолку 5 помещения, например, операционной, в больнице. На Фигуре 1 хирургический светильник 1 уже прикреплен к потолку 5 помещения. В качестве альтернативы, в других конструкциях светильник 1 также предназначен для крепления к стене или полу помещения.
Хирургический светильник 1 в соответствии с Фигурой 1 включает в себя крепежный элемент 4, который в рабочем состоянии хирургического светильника 1 крепится непосредственно к потолку 5. Система удерживающего рычага 6 соединена с крепежным элементом 4. Система удерживающего рычага 6 установлена с возможностью поворота/поддерживается первым концом/концевым участком на крепежном элементе 4. На втором конце/концевом участке, противоположном первому концу, лампа 2 хирургического светильника 1 с расположена с возможностью поворота/поддерживается на системе удерживающего рычага 6.
Световой 2 образует свет/осветительное устройство/лампу, которая, в свою очередь, сама поддерживает группу отдельных источников света, а именно светодиодов. В источнике света имеется один светодиод, а также группу светодиодов, которые объединены с одной (связанной) системой оптических линз. Таким образом, каждый источник света генерирует в своем активном состоянии во время работы хирургического светильника 1 групповой/параллельно направленный пучок света. Отдельные источники света размещены так, чтобы распределяться в корпусе 3 светового блока 2. Световой блок 2, что, в свою очередь, видно на Фигуре 1, по существу, представляет собой источник света зонтичного типа. Следовательно, корпус 3 имеет изогнутое удлинение. Корпус 3 в целом проходит вдоль шагового сегмента.
Источники света расположены в корпусе 3 таким образом, что все они со своим соответствующим выходным светом/оптическими линзами направлены на общую сторону излучения света 9 корпуса 3. Указанная сторона излучения света 9 корпуса 3 является вогнутой нижней частью 9 корпуса 3. Таким образом, во время работы хирургического светильника 1 источники света в их активированном состоянии излучают световой пучок в направлении стороны совместного излучения 9. Таким образом, источники света лампы 2 направляют свет на мнимую горизонтальную плоскость совместного излучения (например, поверхность операционного стола).
Сторона корпуса 3, обращенная в сторону от стороны излучения света 9, называется верхней стороной 10. Упомянутая верхняя сторона 10 является выпуклой стороной корпуса 3 в форме зонта.
Для поворотного и подвижного крепления лампы 2 на крепежном элементе 4 выполнена шарнирная система удерживающего рычага 6. Система удерживающего рычага 6 включает в себя трубчатую опорную часть 16, которая, в свою очередь, плотно закреплена, предпочтительно с возможностью вращения и перемещения, к крепежному элементу 4. В качестве альтернативы опорный участок 16 также может быть частью крепежного элемента 4, при этом опорный участок в таком случае предпочтительно интегрирован с крепежным элементом 4.
В опорной части 16 группа частей удерживающего рычага 14a-14d расположены с возможностью перемещения относительно опорной части 16, а также относительно друг друга. Первая часть удерживающего рычага 14a выполнена на втором конце системы удерживающего рычага 6 и прикреплена к лампе 2. Лампа 2 с этого конца имеет точку опоры 12, которая образует ось поворота, проходящую в плоскости проекции на Фигуре 1. Точка опоры 12 образована проекцией в виде стержня, которая плотно прикреплена к корпусу 3. Таким образом, точка опоры 12 образует первое (одноосное) шарнирное соединение 17.
Вторая часть удерживающего рычага 14b системы удерживающего рычага 6, свою очередь, присоединена к первой части удерживающего рычага 14a с возможностью вращения. Второй поворотный шарнир 18, который также может быть универсальным, служит для этой цели. Вторая часть удерживающего рычага 14b по существу изогнута в форме L. Вторая часть удерживающего рычага 14b, в свою очередь, соединена с третьей частью удерживающего рычага 14 с помощью третьего шарнира 19. Третий шарнир 19 представляет собой (первый) универсальный шарнир 15a. Третья часть удерживающего рычага 14c, в свою очередь, шарнирно соединена с четвертой частью удерживающего рычага 14d через шарнир 20. Четвертый шарнир 20 также представляет собой (второй) универсальный шарнир 15b. Четвертая часть удерживающего рычага вращается вокруг оси вращения (одноосная) относительно опорной части 16 с помощью пятого шарнира 21. Взаимодействие частей удерживающего рычага 14a-14d, а также поворотных шарниров 17-21, образует шарнирную систему удерживающего рычага 6, которая обеспечивает универсальное позиционирование лампы 2 в пространстве.
В соответствии с изобретением, как показано на Фигуре 1 в виде трех исходных частей 8; 8a, 8b, 8c, по меньшей мере, одно дополнительное устройство для определения положение 7 выполнено на хирургическом светильнике 1. Устройство для определения положения 7 разработано и расположено таким образом, чтобы в рабочем состоянии оно определяло значение для определения расстояния между исходными частями 8; 8a, 8b, 8c на лампе 2 или системе удерживающего рычага 6 и потолком 5. Как показано на Фигуре 1, устройство для определения положения 7 может состоять из группы, а именно, трех, датчиков 11, 13 или 22, которые подробно описываются ниже в исходных частях 8a, 8b, 8c, или, в качестве альтернативы, может иметь лишь некоторые/отдельные датчики 11, 13 и/или 22. Соответствующий датчик 11, 13 или 22 всегда служит для определения значения, которое, в свою очередь, используется для определения/ссылки на положение/высоту лампы 2.
В первой исходной части 8a хирургического светильника 1 имеется (первый) датчик определения расстояния 11 устройства для определения положения 7, который способен непосредственно определять расстояние от объекта. Первый датчик определения расстояния 11 для ясности просто показан с помощью стрелки. В частности, первый датчик определения расстояния 11 расположен в корпусе 3. Первый датчик определения расстояния 11 представляет собой инфракрасный датчик. Первый датчик определения расстояния 11 имеет диапазон измерения (длина/расширение области определения измерительного поля), по меньшей мере, 1,50 м, предпочтительно, по меньшей мере, 2 м. Первый датчик определения расстояния 11 расположен по направлению к верхней стороне 10 корпуса 3. Первый датчик определения расстояния 11 включает в себя область определения измерительного поля, которая всегда направлена, по меньшей мере с определенной пропорцией, противоположно действию гравитации, т. е. пространственно вверх в предполагаемом положении установки. Первый датчик определения расстояния 11, следовательно, непосредственно определяет регулировку высоты лампы 2 путем измерения относительного расстояния между первой исходной частью 8a/корпусом 3 и потолком 5.
В этой примерной конструкции лампа 2 не может быть полностью повернута на 360°, а только в таком диапазоне, например против часовой стрелки, а также по часовой стрелке примерно на 165° в соответствии с Фигурой 1, что в каждом положении вращения лампы 2 направляющий компонент области определения измерительного поля первого датчика расстояния 11 направлен в сторону потолка 5. Первый датчик расстояния 11 расположен на корпусе 3 вдоль воображаемой оси поворота.
Первый датчик оперделения расстояния 11 непрерывно определяет, когда хирургический светильник 1 активирован, расстояние от первой исходной части 8a/корпуса 3 (в области оси поворота) по отношению к потолку 5.
Во второй исходной части 8b, которая находится рядом со вторым шарниром 18, т. е. на второй части удерживающего рычага 14b, расположен еще один (второй) датчик расстояния 13 устройства для определения положения 7. Второй датчик расстояния 13 сконструирован и работает так же, как первый датчик расстояния 11. Второй датчик расстояния 13 расположен на верхней стороне второй части удерживающего рычага 14b, т. е. сторона второй части удерживающего рычага 14b направлена на потолок 5 в рабочем состоянии. Вторая часть удерживающего рычага 14b надлежащим образом смещается, когда лампа 2 опускается или поднимается, в равной степени по высоте (в пространстве)/расстоянию относительно потолка 5. Второй датчик расстояния 13, в свою очередь, служит непосредственно для определения расстояния между второй исходной частью 8b (на второй части удерживающего рычага 14b) и потолком 5. Этот второй датчик расстояния 13 устройства для определения положения 7 в основном может располагаться при любом количестве дополнительных положений второй части удерживающего рычага 14b, и, соответственно, других частей удерживающего рычага с 14a по 14d.
Таким образом, устройство для определения положения 7 включает в себя, при использовании соответствующего датчика расстояния 11, и, соответственно, 13, датчик 11, 13, расположенный по направлению к верхней стороне, т. е. к проецируемой верхней стороне хирургического светильника 1. Под направлением «вверх» в частности подразумевается направление, противоположное действию гравитации, и, соответственно, вертикальное направление в пространственной системе координат.
В исходной части 8c, которая находится в области третьего шарнира 19, и, соответственно, интегрирована с третьим шарниром 19, устройство для определения положения 7 включает в себя датчик определения угла 22 в качестве альтернативы или в качестве дополнения к соответствующему датчику расстояния 11, 13. Третья исходная часть 8c в этой конструкции представляет собой шарнир системы удерживающего рычага 6. Датчик определения угла 22 служит для косвенного определения расстояния между первым шарниром 19/третьей исходной частью 8c и потолком 5. Датчик определения угла 22 определяет (относительное) угловое положение/угол между продольной осью линейно простирающейся третьей части удерживающего рычага 14c и опорной линией (например, воображаемая прямая линия, определяемая крепежным элементом 4 или продольной осью опорной части 16) таким образом, что текущее положение/местоположение/высота лампы 2 может быть косвенно определена. Дальнейшее исходное вычисление фактического расстояния между потолком 5 и третьей исходной частью 8c посредством измеренного углового положения предпочтительно выполняется устройством для определения положения 7, или, в качестве альтернативы, подключенным к нему блоком управления, как описано ниже.
Датчик определения угла 22 в основном может использоваться в качестве дополнения или в качестве альтернативы первому и/или второму датчику расстояния 11,13 в хирургическом светильнике 1/устройстве для определения положения 7.
В качестве альтернативы третьему шарниру 19, образующему первый универсальный шарнир 15a, также может использоваться датчик определения угла 22 в другой части системы удерживающего рычага 6, например, в четвертом шарнире 20.
Устройство для определения положения 7 обычно дополнительно подключено для передачи данных (электрически) к блоку управления, который не показан здесь для ясности. Блок управления расположен в корпусе 3 лампы 2. Блок управления взаимодействует с источниками света, управляя ими таким образом, что блок управления используется для регулировки множества настроек/характеристик освещения лампы 2 в рабочем состоянии (в ответ на высоту лампы 2 относительно потолка 5, обнаруженную/определенную устройством для определения положения 7). Характеристики освещения, регулируемые блоком управления в этой примерной конструкции, включают, по меньшей мере, размер создаваемого светового поля (световое поле, создаваемое активированными источниками света), цвет света (создаваемого светового поля), а также количество источников света под напряжением. Блок управления запрограммирован таким образом, что он регулирует соответствующие характеристики света в зависимости от расстояния между исходной частью 8; 8a, 8b, 8c и потолком 5, определенного с помощью устройства для определения положения 7 в рабочем состоянии хирургического светильника 1.
Кроме того, блок управления преимущественно соединен с устройством сброса, которое, когда хирургический светильник 1 активирован, позволяет определить целевое состояние хирургического светильника 1 путем определения фактического расстояния относительно потолка 5 и, в то же время сохраняя текущие отрегулированные характеристики света лампы 2 вместе со значением расстояния (и, соответственно, значением высоты). Устройство сброса включает в себя кнопку сброса и/или устройство ввода речевых команд, такое как громкоговоритель, и, в свою очередь, подключено электрически/для передачи данных к блоку управления.
Другими словами, в хирургическом светильнике 1 в соответствии с изобретением датчик 11, 13 расположен таким образом, чтобы измерялось расстояние лампы 2 относительно потолка 5. Указанный датчик расстояния 11, 13, к примеру, расположен на задней стороне/верхней стороне 10 хирургического светильника 1. Точно так же угол подпружиненного рычага с регулировкой высоты в форме третьей части удерживающего рычага 14c также может быть обнаружен (с помощью датчика 22) для определения высоты хирургического светильника 1 (с помощью блока управления).
Список ссылочных номеров
1 Хирургический светильник
2 Лампа
3 Корпус
4 Крепежный элемент
5 Потолок
6 Система удерживающего рычага
7 Устройство для определения положения
8 Исходная часть
8a Первая исходная часть
8b Вторая исходная часть
8c Третья исходная часть
9 Сторона излучения света/нижняя сторона
10 Верхняя сторона
11 Первый датчик расстояния
12 Точка опоры
13 Второй датчик расстояния
14a Первая часть удерживающего рычага
14b Вторая часть удерживающего рычага
14c Третья часть удерживающего рычага
14d Четвертая часть удерживающего рычага
15a Первый универсальный шарнир
15b Второй универсальный шарнир
16 Опорная часть
17 Первый шарнир
18 Второй шарнир
19 Третий шарнир
20 Четвертый шарнир
21 Пятый шарнир
22 Датчик определения угла
Изобретение относится к медицинской технике, а именно к хирургическому светильнику, состоящему из лампы, которая имеет группу источников света, индивидуально размещенных в корпусе, при этом каждый источник света расположен и направлен таким образом, что источник света создает световой луч под напряжением, крепежного элемента, который подготовлен для крепления к потолку, стене или полу помещения, и системы удерживающего рычага, которая соединяет лампу с возможностью вращения и/или перемещения с крепежным элементом. Устройство для определения положения сконструировано и изготовлено таким образом, что в рабочем состоянии устройство для определения положения определяет расстояние исходной части лампы или системы удерживающего рычага от потолка. 9 з.п. ф-лы, 1 ил.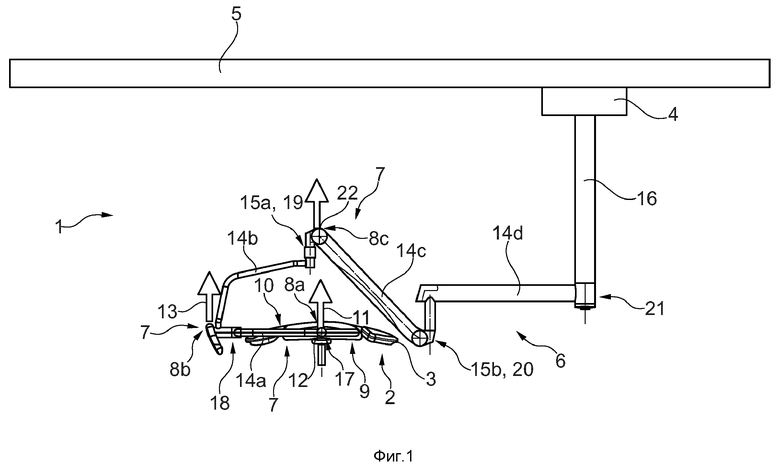
1. Хирургический светильник (1), включающий лампу (2), которая содержит группу источников света, индивидуально размещенных в корпусе (3), при этом каждый источник света во включенном состоянии выполнен с возможностью создания светового луча, крепежный элемент (4), выполненный с возможностью крепления к потолку (5), стене или полу помещения, и систему удерживающего рычага (6), выполненную с возможностью соединения лампы (2), вращения и/или перемещения с крепежным элементом (4), отличающийся тем, что устройство для определения положения (7) содержит датчик (11, 13) расстояния и в рабочем состоянии выполнено с возможностью определения расстояния от исходной части (8) лампы (2) или системы удерживающего рычага (6) до потолка (5).
2. Хирургический светильник (1) по п.1, отличающийся тем, что корпус (3) содержит изогнутое удлинение, при этом источники света выполнены с возможностью создания световых лучей, которые излучают свет в сторону излучения (9) корпуса (3).
3. Хирургический светильник (1) по п.2, отличающийся тем, что устройство для определения положения (7) содержит первый датчик расстояния (11), который расположен на верхней стороне (10) корпуса (3), обращенной в сторону от стороны излучения (9).
4. Хирургический светильник (1) по п.3, отличающийся тем, что первый датчик расстояния (11) расположен в области оси поворота, вокруг которой лампа (2) выполнена с возможностью поворота относительно системы удерживающего рычага (6).
5. Хирургический светильник (1) по любому из пп.1-4, отличающийся тем, что устройство для определения положения (7) содержит второй датчик расстояния (13), установленный в системе удерживающего рычага (6).
6. Хирургический светильник (1) по п.5, отличающийся тем, что второй датчик расстояния (13) расположен на универсальном шарнире (15a, 15b) системы удерживающего рычага (6).
7. Хирургический светильник (1) по любому из пп.1-6, отличающийся тем, что устройство для определения положения (7) включает датчик определения угла (22), который выполнен с возможностью определения угла части удерживающего рычага (14c) системы удерживающего рычага (6), которая выполнена с возможностью вращения относительно крепежного элемента (4).
8. Хирургический светильник (1) по любому из пп.1-7, отличающийся тем, что устройство для определения положения (7) выполнено с возможностью подключения к блоку управления, расположенному в корпусе (3) лампы (2) для передачи данных.
9. Хирургический светильник (1) по п.8, отличающийся тем, что блок управления выполнен с возможностью соединения с источниками света для управления им, при этом по меньшей мере одна характеристика света лампы (2) регулируется в ответ на вывод управляющей команды от блока управления.
10. Хирургический светильник (1) по пп.8 и 9, отличающийся тем, что блок управления запрограммирован с возможностью регулирования по меньшей мере одной характеристики света в ответ на расстояние между исходной частью (8) и потолком (5), определенное с помощью устройства для обнаружения положения (7), в рабочем состоянии.
| DE 10225077 A1, 24.12.2003 | |||
| US 4884008 A, 28.11.1989 | |||
| ОСВЕЩЕНИЕ, ВСТРОЕННОЕ В ПОТОЛОК И СФОКУСИРОВАННОЕ НА ХИРУРГИЧЕСКОМ ПОЛЕ | 2006 |
|
RU2406020C2 |
| УСТРОЙСТВО И СПОСОБЫ КОНФИГУРАЦИИ ОСВЕЩЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДАТЧИКОВ РАССТОЯНИЯ | 2013 |
|
RU2623491C2 |

