[0001] Настоящая заявка испрашивает приоритет по предварительной заявке на патент США №62/347,921, поданной 9 июня 2016 г. и заявке на патент США №15/616,212, поданной 7 июня 2017 г., каждая из которых включена в полном объеме в настоящую заявку путем отсылки.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится, в общем, к инъекторному устройству и способу для доставки текучей среды в тело пациента посредством инъекции.
Описание предшествующего уровня техники
[0003] Различные типы автоматических инъекционных устройств созданы, чтобы дать возможность неподготовленному персоналу или самостоятельно вводить лекарственные растворы и другие жидкие лекарственные препараты. В общем, упомянутые устройства включают в себя резервуар, который предварительно заполняют жидким лекарственным препаратом, и механизм некоторого типа для автоматической инъекции через иглу, который может запускаться пользователем. Когда подлежащий введению объем текучей среды или лекарства, в общем, ниже некоторого объема, например, 1 мл, обычно используют автоматический инъектор, время инъекции которого обычно составляет, приблизительно, от 10 до 15 секунд. Когда подлежащий введению объем текучей среды или лекарства превышает 1 мл, время инъекции обычно увеличивается, вследствие чего пациенту труднее выдерживать контакт между устройством и целевой зоной кожи пациента. Кроме того, когда подлежащий введению объем текучей среды или лекарства становится больше, желательно увеличение времени инъекции. Традиционный способ для замедленной инъекции лекарства в пациента состоит в том, чтобы начать инъекцию внутривенно и медленно вводить лекарство в пациента. Такую процедуру обычно выполняют в больнице или амбулатории.
[0004] Некоторые устройства допускают самостоятельную инъекцию в домашних условиях и способны постепенно инъецировать жидкий лекарственный препарат в кожу пациента. В некоторых случаях, данные устройства являются достаточно небольшими (как по высоте, так и по габаритам), что допускает их «ношение» пациентом в то время, когда выполняется инфузия жидкого лекарственного препарата в пациента. Данные устройства обычно включают в себя насос или механизм нагнетания другого типа, чтобы вызывать истечение жидкого лекарственного препарата из резервуара в инъекционную иглу. Упомянутые устройства обычно также включают в себя клапан или механизм управления течением, чтобы инициировать истечение жидкого лекарственного препарата в надлежащее время, и пусковой механизм, чтобы инициировать инъекцию.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В одном аспекте приводной узел иглы для системы доставки лекарств включает в себя приводной блок иглы, имеющий направляющую поверхность, челнок иглы, имеющий кулачковую поверхность, при этом челнок иглы является перемещаемым вдоль вертикальной оси между первым положением и вторым положением. Челнок иглы выполнен с возможностью перемещения между первым и вторым положением благодаря зацеплению между направляющей поверхностью приводного блока иглы и кулачковой поверхностью челнока иглы. Узел дополнительно включает в себя иглу, вмещенную в челнок иглы.
[0006] Челнок иглы может включать в себя смещающий элемент, выполненный с возможностью перемещения челнока иглы из первого положения во второе положение, когда направляющая поверхность приводного блока иглы расцеплена с кулачковой поверхностью челнока иглы. Узел может включать в себя направляющую стойку, при этом челнок иглы перемещается вдоль направляющей стойки. Направляющая стойка может быть прямолинейной. Кулачковая поверхность челнока иглы может включать в себя первый кулачковый элемент и второй кулачковый элемент, отстоящий от первого кулачкового элемента, при этом направляющая поверхность является непрямолинейной и включает в себя первую сторону и вторую сторону, расположенную противоположно первой стороне. Второй кулачковый элемент челнока иглы может быть выполнен с возможностью зацепления второй стороны направляющей поверхности, чтобы перемещать челнок иглы из первого положения во второе положение, при этом первый кулачковый элемент челнока иглы выполнен с возможностью зацепления первой стороны направляющей поверхности, чтобы перемещать челнок иглы из второго положения в первое положение.
[0007] В дополнительном аспекте система доставки лекарств для инъекции лекарственного препарата включает в себя корпус, приводной узел иглы, вмещенный внутри корпуса, при этом приводной узел иглы включает в себя приводной блок иглы, имеющий направляющую поверхность, причем приводной блок иглы является перемещаемым между первым положением и вторым положением, и челнок иглы имеет кулачковую поверхность. Челнок иглы является перемещаемым вдоль вертикальной оси между первым положением и вторым положением, при этом челнок иглы выполнен с возможностью перемещения между первым и вторым положением благодаря зацеплению между направляющей поверхностью приводного блока иглы и кулачковой поверхностью челнока иглы. Приводной узел иглы включает в себя также иглу, вмещенную в челнок иглы. Система дополнительно включает в себя кнопочный исполнительный элемент, по меньшей мере, частично вмещенный в корпус, при этом перемещение кнопочного исполнительного элемента сконфигурировано с возможностью перемещения приводного блока иглы из первого положения во второе положение, и причем перемещение приводного блока иглы из первого положения во второе положение сконфигурировано с возможностью вызова перемещения челнока иглы из первого положения во второе положение.
[0008] The челнок иглы может включать в себя смещающий элемент, выполненный с возможностью перемещения челнока иглы из первого положения во второе положение, когда направляющая поверхность приводного блока иглы расцеплена с кулачковой поверхностью челнока иглы. Система может включать в себя направляющую стойку, продолжающуюся от корпуса, при этом челнок иглы перемещается вдоль направляющей стойки. Направляющая стойка может продолжаться приблизительно перпендикулярно от корпуса.
[0009] Система может включать в себя подкладку, выполненную с возможностью зацепления с иглой, когда привод иглы находится во втором положении. Подкладка может вмещаться в кронштейн подкладки, имеющий кулачковую поверхность, выполненную с возможностью зацепления с соответствующей рабочей поверхностью кулачка на корпусе, чтобы перемещать подкладку под иглу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Вышеупомянутые и другие признаки и преимущества настоящего изобретения и метод их получения станут очевидными, и само изобретение будет более понятным при обращении к последующим описаниям вариантов осуществления изобретения, взятым в связи с прилагаемыми чертежами, на которых:
[0011] Фиг. 1 - вид в перспективе системы доставки лекарств в соответствии с одним аспектом настоящего изобретения.
[0012] Фиг. 2 - вид в перспективе с разрезом системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения.
[0013] Фиг. 3 - вид спереди в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения.
[0014] Фиг. 4 - вид сверху системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, при этом показано, что верхний участок корпуса снят, и система доставки лекарств находится в положении перед использованием.
[0015] Фиг. 5 - вид сверху в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении перед использованием.
[0016] Фиг. 6 - вид спереди в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении перед использованием.
[0017] Фиг. 7 - вид сверху системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, при этом показано, что верхний участок корпуса снят, и система доставки лекарств находится в положении предварительного срабатывания.
[0018] Фиг. 8 - вид сверху в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении предварительного срабатывания.
[0019] Фиг. 9 - вид спереди в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении предварительного срабатывания.
[0020] Фиг. 10 - вид сверху системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, при этом показано, что верхний участок корпуса снят, и система доставки лекарств находится в положении использования.
[0021] Фиг. 11 - вид сверху в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении использования.
[0022] Фиг. 12 - вид спереди в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении использования.
[0023] Фиг. 13 - вид сверху системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, при этом показано, что верхний участок корпуса снят, и системы доставки лекарств находится в положении после использования.
[0024] Фиг. 14 - вид сверху в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении после использования.
[0025] Фиг. 15 - вид спереди в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением системы доставки лекарств в положении после использования.
[0026] Фиг. 15A - вид спереди в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением подкладки с системой доставки лекарств в положении перед использованием.
[0027] Фиг. 15B - вид в перспективе с разрезом системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением подкладки с системой доставки лекарств в положении перед использованием.
[0028] Фиг. 15C - вид в перспективе с разрезом системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением подкладки с системой доставки лекарств в положении перед использованием.
[0029] Фиг. 16 - местный вид в разрезе системы доставки лекарств, показанной на фиг. 1, в соответствии с одним аспектом настоящего изобретения, с представлением клапанного узла.
[0030] Фиг. 17 - вид в перспективе узла привода для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения.
[0031] Фиг. 18 - вид в разрезе узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения, с представлением положения перед использованием узла привода.
[0032] Фиг. 19 - вид в разрезе узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения, с представлением положения использования узла привода.
[0033] Фиг. 20 - вид в разрезе узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения, с представлением положения после использования узла привода.
[0034] Фиг. 21 - вид в перспективе элемента привода плунжера узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения.
[0035] Фиг. 22 - вид в перспективе первого плунжерного элемента узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения.
[0036] Фиг. 23 - вид в перспективе элемента привода плунжера и первого плунжерного элемента узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения, с представлением элемента привода плунжера в зацеплении с первым плунжерным элементом.
[0037] Фиг. 24 - вид в перспективе элемента привода плунжера и первого плунжерного элемента узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения, с представлением элемента привода плунжера, расцепленного с первым плунжерным элементом.
[0038] Фиг. 25 - вид в перспективе элемента привода плунжера и первого плунжерного элемента узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения, с представлением элемента привода плунжера, отцепленного от и аксиально смещенного относительно первого плунжерного элемента.
[0039] Фиг. 26 - вид спереди первого плунжерного элемента и второго плунжерного элемента узла привода, показанного на фиг. 17, в соответствии с одним аспектом настоящего изобретения.
[0040] Фиг. 27 - вид сверху приводного узла для системы доставки лекарств в соответствии с дополнительным аспектом настоящего изобретения.
[0041] Фиг. 28 - вид в перспективе узла привода, показанного на фиг. 27, в соответствии с одним аспектом настоящего изобретения.
[0042] Фиг. 29 - вид в разрезе узла привода, показанного на фиг. 27 в соответствии с одним аспектом настоящего изобретения, с представлением положения перед использованием узла привода.
[0043] Фиг. 30 - вид в перспективе узла привода, показанного на фиг. 27, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода, вмещенного в нижний участок корпуса.
[0044] Фиг. 31 - вид в перспективе корпуса, показанного на фиг. 30, в соответствии с одним аспектом настоящего изобретения.
[0045] Фиг. 32 - вид сверху узла привода, показанного на фиг. 27, в соответствии с одним аспектом настоящего изобретения, с представлением зацепления узла привода с участком привода иглы в положении предварительного срабатывания узла привода.
[0046] Фиг. 33 - увеличенный вид в перспективе узла привода, показанного на фиг. 27, в соответствии с одним аспектом настоящего изобретения, с представлением зацепления узла привода с участком привода иглы в положении предварительного срабатывания узла привода.
[0047] Фиг. 34 - вид спереди приводного узла иглы в соответствии с одним аспектом настоящего изобретения.
[0048] Фиг. 35 - вид слева в перспективе челнока иглы приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения.
[0049] Фиг. 36 - вид справа в перспективе челнока иглы приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения.
[0050] Фиг. 37A - вид спереди приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении перед использованием.
[0051] Фиг. 37B - вид спереди приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении использования.
[0052] Фиг. 37C - вид спереди приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в первоначальном положении после использования.
[0053] Фиг. 37D - вид спереди приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении после использования.
[0054] Фиг. 38A - вид в перспективе приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении использования.
[0055] Фиг. 38B - вид в перспективе приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в первоначальном положении после использования.
[0056] Фиг. 39 - вид в перспективе исполнительной кнопки и приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в первоначальном положении после использования.
[0057] Фиг. 40A - вид в разрезе исполнительной кнопки и приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в первоначальном положении после использования.
[0058] Фиг. 40B - вид в перспективе исполнительной кнопки и приводного узла иглы, показанного на фиг. 34, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении после использования.
[0059] Фиг. 41 - вид в перспективе узла привода для системы доставки лекарств в соответствии с дополнительным аспектом настоящего изобретения.
[0060] Фиг. 42 - вид в перспективе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, со снятым верхним участком корпуса.
[0061] Фиг. 43 - вид в разрезе узла привода, показанного на фиг. 41 в соответствии с одним аспектом настоящего изобретения.
[0062] Фиг. 44 - вид в перспективе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения.
[0063] Фиг. 45 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении перед использованием.
[0064] Фиг. 46 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении перед использованием.
[0065] Фиг. 47 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении перед использованием.
[0066] Фиг. 48 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении предварительного срабатывания.
[0067] Фиг. 49 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении предварительного срабатывания.
[0068] Фиг. 50 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении предварительного срабатывания.
[0069] Фиг. 51 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0070] Фиг. 52 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0071] Фиг. 53 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0072] Фиг. 54 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0073] Фиг. 55 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0074] Фиг. 56 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0075] Фиг. 57 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0076] Фиг. 58 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в первоначальном положении после использования.
[0077] Фиг. 59 - вид в перспективе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в первоначальном положении после использования.
[0078] Фиг. 60 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении после использования.
[0079] Фиг. 61 - вид сверху узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении после использования.
[0080] Фиг. 62 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении перед использованием.
[0081] Фиг. 63 - вид в разрезе узла привода, показанного на фиг. 41, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[0082] Фиг. 64 - вид в перспективе узла привода в соответствии с дополнительным аспектом настоящего изобретения.
[0083] Фиг. 65A - вид спереди приводного узла иглы в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении использования.
[0084] Фиг. 65B - вид спереди приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении использования.
[0085] Фиг. 65C - вид спереди приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в первоначальном положении после использования.
[0086] Фиг. 65D - вид спереди приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении после использования.
[0087] Фиг. 65E - вид спереди приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении перед использованием.
[0088] Фиг. 65F - вид в разрезе приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении перед использованием.
[0089] Фиг. 65G - вид спереди приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении перед использованием, с аксиально смещенной исполнительной кнопкой.
[0090] Фиг. 65H - вид в разрезе приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения, с представлением приводного узла иглы в положении перед использованием, с аксиально смещенной исполнительной кнопкой.
[0091] Фиг. 66 - вид в перспективе пружины кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения.
[0092] Фиг. 67 - вид в перспективе исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения.
[0093] Фиг. 68 - вид в разрезе пружины кнопки и исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения.
[0094] Фиг. 68A - вид в перспективе исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения.
[0095] Фиг. 68B - вид снизу исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения.
[0096] Фиг. 68C - вид спереди исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения.
[0097] Фиг. 68D - вид сверху исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения, с представлением исполнительной кнопки в положении перед использованием.
[0098] Фиг. 68E - вид спереди исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения, с представлением исполнительной кнопки в положении перед использованием.
[0099] Фиг. 68F - вид сверху исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения, с представлением исполнительной кнопки в положении использования.
[00100] Фиг. 68G - вид спереди исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с дополнительным аспектом настоящего изобретения, с представлением исполнительной кнопки в положении использования.
[00101] Фиг. 69 - вид сверху исполнительной кнопки приводного узла иглы, показанного на фиг. 65A, в соответствии с одним аспектом настоящего изобретения.
[00102] Фиг. 70A - схематическое изображение узла привода в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении перед использованием.
[00103] Фиг. 70B - схематическое изображение узла привода, показанного на фиг. 70A, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[00104] Фиг. 70C - схематическое изображение узла привода, показанного на фиг. 70A, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[00105] Фиг. 70D - схематическое изображение узла привода, показанного на фиг. 70A, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[00106] Фиг. 70E - схематическое изображение узла привода, показанного на фиг. 70A, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении использования.
[00107] Фиг. 70F - схематическое изображение узла привода, показанного на фиг. 70A, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении после использования.
[00108] Фиг. 70G - схематическое изображение узла привода, показанного на фиг. 70A, в соответствии с одним аспектом настоящего изобретения, с представлением узла привода в положении после использования.
[00109] Фиг. 71 - вид в перспективе распорного узла для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения, с представлением собранного положения перед использованием распорного узла.
[00110] Фиг. 72 - вид в перспективе распорного узла, показанного на фиг. 71, в соответствии с одним аспектом настоящего изобретения, с представлением положения использования распорного узла.
[00111] Фиг. 73 - вид в перспективе распорного узла, показанного на фиг. 71, в соответствии с одним аспектом настоящего изобретения, с представлением первоначального положения после использования распорного узла.
[00112] Фиг. 74 - вид в перспективе ограничивающего элемента в соответствии с одним аспектом настоящего изобретения.
[00113] Фиг. 75 - вид спереди распорного узла для системы доставки лекарств в соответствии с дополнительным аспектом настоящего изобретения.
[00114] Фиг. 76 - вид сверху распорного узла для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения.
[00115] Фиг. 77 - вид в перспективе распорного узла, показанного на фиг. 76, в соответствии с одним аспектом настоящего изобретения.
[00116] Фиг. 78 - вид в разрезе распорного узла, показанного на фиг. 76, в соответствии с одним аспектом настоящего изобретения.
[00117] Фиг. 79 - вид в перспективе распорного узла для системы доставки лекарств в соответствии с дополнительным аспектом настоящего изобретения.
[00118] Фиг. 80 - вид в перспективе распорного узла для системы доставки лекарств в соответствии с другим аспектом настоящего изобретения.
[00119] Фиг. 81A - вид в разрезе распорного узла, показанного на фиг. 80, в соответствии с одним аспектом настоящего изобретения, с представлением положения перед сборкой распорного узла.
[00120] Фиг. 81B - вид в разрезе распорного узла, показанного на фиг. 80, в соответствии с одним аспектом настоящего изобретения, с представлением собранного положения распорного узла.
[00121] Фиг. 82 - вид в перспективе узла привода для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения.
[00122] Фиг. 83 - вид в перспективе узла привода, показанного на фиг. 82, в соответствии с одним аспектом настоящего изобретения, со снятым верхним участком корпуса.
[00123] Фиг. 84 - вид в разрезе узла привода, показанного на фиг. 82, в соответствии с одним аспектом настоящего изобретения, с представлением положения перед использованием узла привода.
[00124] Фиг. 85 - увеличенный вид в разрезе узла привода, показанного на фиг. 82, в соответствии с одним аспектом настоящего изобретения, с представлением положения перед использованием узла привода.
[00125] Фиг. 86 - вид сверху смещающего элемента узла привода, показанного на фиг. 82, в соответствии с одним аспектом настоящего изобретения.
[00126] Фиг. 87 - вид в перспективе узла привода, показанного на фиг. 82, в соответствии с одним аспектом настоящего изобретения, с представлением ограничивающего элемента в зацеплении с узлом привода.
[00127] Фиг. 88 - вид в перспективе узла привода для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения.
[00128] Фиг. 89 - вид в перспективе узла привода, показанного на фиг. 88 в соответствии с одним аспектом настоящего изобретения, с представлением положения перед использованием узла привода.
[00129] Фиг. 90 - вид в разрезе узла привода, показанного на фиг. 88, в соответствии с одним аспектом настоящего изобретения.
[00130] Фиг. 91 - вид в перспективе узла привода, показанного на фиг. 88, в соответствии с одним аспектом настоящего изобретения, с представлением положения после использования узла привода.
[00131] Фиг. 92 - вид в разрезе узла привода, показанного на фиг. 88, в соответствии с одним аспектом настоящего изобретения, с представлением положения перед использованием узла привода.
[00132] Фиг. 93 - вид спереди узла привода, показанного на фиг. 88, в соответствии с одним аспектом настоящего изобретения, с представлением положения использования узла привода.
[00133] Фиг. 94 - вид в перспективе распорного узла для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения.
[00134] Фиг. 95 - вид спереди распорного узла, показанного на фиг. 94, в соответствии с одним аспектом настоящего изобретения.
[00135] Фиг. 96 - вид в разрезе распорного узла, показанного на фиг. 94, в соответствии с одним аспектом настоящего изобретения.
[00136] Фиг. 97 - вид в перспективе распорного узла, показанного на фиг. 94, в соответствии с одним аспектом настоящего изобретения, со снятой шайбой.
[00137] Фиг. 98 - вид в перспективе фиксированной распорки распорного узла, показанного на фиг. 94, в соответствии с одним аспектом настоящего изобретения.
[00138] Фиг. 99 - вид в перспективе регулируемой распорки распорного узла, показанного на фиг. 94, в соответствии с одним аспектом настоящего изобретения.
[00139] Фиг. 100 - вид в перспективе шайбы распорного узла, показанного на фиг. 94, в соответствии с одним аспектом настоящего изобретения.
[00140] Соответствующие номера позиций указывают на соответствующие части на нескольких видах. Иллюстративные примеры, приведенные в настоящей заявке, поясняют примерные аспекты изобретения, и данные иллюстративные примеры нельзя толковать в смысле какого-либо ограничения объема изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[00141] Нижеследующее описание предназначено для предоставления специалистам в данной области техники возможности изготавливать и применять описанные варианты осуществления, предназначенные для осуществления изобретения. Однако, специалистам будут совершенно очевидны различные модификации, эквиваленты, варианты и альтернативные варианты. Предполагается, что все такие модификации, варианты, эквиваленты и альтернативные варианты находятся в пределах существа и объема настоящего изобретения.
[00142] В целях последующего описания, термины «верхний», «нижний», «правый», «левый», «вертикальный», «горизонтальный», «верх», «низ», «боковой», «продольный» и производные от них должны относиться к изобретению в том виде, как оно ориентировано на чертежах. Однако, следует понимать, что изобретение может допускать различные альтернативные варианты, кроме случае, когда прямо предусмотрено иное. Следует также понимать, что конкретные устройства, изображенные на прилагаемых чертежах и охарактеризованные в последующем описании, являются просто примерными вариантами осуществления изобретения. Следовательно, конкретные размеры и другие физические характеристики, относящиеся к вариантам осуществления, раскрытым в настоящем описании, нельзя считать ограничивающими.
[00143] Как показано на фиг. 1-16, система 10 доставки лекарств в соответствии с одним аспектом настоящего изобретения включает в себя узел 12 привода, контейнер 14, клапанный узел 16 и приводной узел 18 иглы. Узел 12 привода, контейнер 14, клапанный узел 16 и приводной узел 18 иглы, по меньшей мере, частично расположены внутри корпуса 20. Корпус 20 включает в себя верхний участок 22 и нижний участок 24, хотя для корпуса 20 можно использовать другие конструкции. В одном аспекте система 10 доставки лекарств является инъекторным устройством, выполненным с возможностью ношения или закрепления на пользователе и доставки предварительно заданной дозы лекарственного препарата, подготовленной внутри контейнера 14 посредством инъекции в пользователя. Систему 10 можно использовать для доставки «болюсной инъекции», когда лекарственный препарат доставляют в пределах установленного периода времени. Лекарственный препарат может доставляться в течение периода времени до 45 минут, хотя можно использовать другие подходящие объемы и длительности инъекции. Болюсное введение или болюсная доставка может выполняться с регулировкой скорости или без конкретной регулировки скорости. Система 10 может доставлять лекарственный препарат в пользователя под постоянным давлением, с меняющейся скоростью. Общее функционирование системы 10 описано ниже со ссылкой на фиг. 1-16, при этом конкретные сведения об узле 12 привода, приводном узле 18 иглы и других конструктивных особенностях системы 10 излагаются ниже в связи с фиг. 17-93.
[00144] Как также показано на фиг. 1-16, система 10 выполнена с возможностью срабатывания при приведении в действие исполнительной кнопки 26 пользователем, что приводит к прокалыванию кожи пользователя иглой 28 узла 18 иглы, приведению в действие узла привода 12 для установки иглы 28 в положение сообщения по текучей среде с контейнером 14 и для вытеснения текучей среды или лекарственного препарата из контейнера 14, и отводу иглы 28 после того, как инъекция лекарственного препарата завершается. Общее функционирование системы доставки лекарств представлено и описано в международных публикациях №№ 2013/155153 и 2014/179774, которые в полном объеме включены в настоящее описание путем отсылки. Корпус 20 системы 10 включает в себя индикаторное окно 30 для наблюдения индикаторного устройства 32, выполненного с возможностью представления пользователю индикации состояния системы 10, и окна 31 контейнера для наблюдения контейнера 14. Индикаторное окно 30 может быть лупой для обеспечения хорошей видимости индикаторного устройства 32. Индикаторное устройство 32 перемещается вместе с приводным узлом 18 иглы при использовании системы 10, чтобы показывать состояние перед использованием, состояние использования и состояние после использования системы 10. Индикаторное устройство 32 представляет визуальные признаки, относящиеся к состоянию, хотя возможно предоставление и других подходящих признаков, например, звуковых или тактильных, в качестве альтернативных или дополнительных признаков.
[00145] Как показано на фиг. 4-6, в положении перед использованием системы 10, контейнер 14 отстоит от узла 12 привода и клапанного узла 16, и игла 28 находится в втянутом положении. Во время предварительного срабатывания системы 10, как показано на фиг. 7-9, узел 12 привода входит в зацепление с контейнером 14, чтобы переместить контейнер 14 к клапанному узлу 16, который выполнен с возможностью прокалывания крышки 36 контейнера 14 и помещения лекарственного препарата внутри контейнера 14 в состояние сообщения по текучей среде с иглой 28 по трубке (не показанной) или через другое подходящее устройство. Узел 12 привода выполнен с возможностью входа в зацепление с пробкой 34 контейнера 14, что будет сначала перемещать весь контейнер 14 в зацепление с клапанным узлом 16 вследствие несжимаемости текучей среды или лекарственного препарата внутри контейнера 14. Предварительное срабатывание системы 10 вызывается приведением в действие исполнительной кнопки 26 пользователем, которая высвобождает приводной узел 18 иглы и узел 12 привода, как подробно описано ниже. Во время предварительного срабатывания, игла 28 все еще находится в втянутом положении и готова переместиться в выдвинутое положение для инъекции пользователю системы 10.
[00146] В положении использования системы 10, как показано на фиг. 10-12, игла 28 находится в выдвинутом положении, по меньшей мере, частично снаружи корпуса 20, при этом узел 12 привода перемещает пробку 34 внутри контейнера 14, чтобы доставить лекарственный препарат из контейнера 14 через иглу 28 и в пользователя. В положении использования клапанный узел 16 уже проколол крышку 36 контейнера 14, чтобы установить контейнер 14 в состояние сообщения по текучей с иглой 28, что также позволяет узлу 12 привода перемещать пробку 34 относительно контейнера 14, поскольку текучая среда имеет возможность дозироваться из контейнера 14. В положении после использования системы 10, показанном на фиг. 13-15, игла 28 находится в втянутом положении и в зацеплении с подкладкой 38, чтобы закупоривать иглу 28 и не допускать никакого остаточного вытекания текучей среды или лекарственного препарата из контейнера 14. Контейнер 14 и клапанный узел 16 могут представлять собой контейнер 14 и клапанный узел 16, представленные и описанные в международной публикации № WO 2015/081337, которая в полном объеме включена в настоящее описание путем отсылки.
[00147] Как показано на фиг. 15A-15C, подкладка 38 смещается в иглу, когда приводной блок 96 иглы перемещается из положения использования в положение после использования. В частности, подкладка 38 размещается на кронштейне 122 подкладки, имеющем кулачковую поверхность 124, которая взаимодействует с рабочей поверхностью 126 кулачка на нижнем участке 24 корпуса 20. Кронштейн 122 подкладки соединен с приводным блоком 96 иглы посредством торсионного стержня 128. Кулачковая поверхность 124 выполнена с возможностью зацепления с рабочей поверхностью 126 кулачка, чтобы отклонять кронштейн 122 подкладки вниз и, тем самым, обеспечивать прохождение подкладки 38 под иглой 28 до смещения вверх в иглу 28. Торсионный стержень 128 позволяет кронштейну 122 подкладки закручиваться вокруг точки опоры приводного блока 96 иглы. Подкладка 38 может быть впрессована в отверстие кронштейна 122 подкладки, хотя возможно использование других подходящих конструкций для закрепления подкладки 38.
[00148] На фиг. 1-33 показан узел 12 привода в соответствии с одним аспектом настоящего изобретения. Как изложено выше, узел 12 привода выполнен с возможностью перемещения контейнера 14, чтобы прокалывать крышку 36 контейнера 14, а также перемещения пробки 34 внутри контейнера 14, чтобы дозировать текучую среду или лекарственный препарат из контейнера 14. Узел 12 привода, показанный на фиг. 17-33, выполнен с возможностью зацепления и взаимодействия с распорным узлом 40, вмещаемым в пробку 34 контейнера 14. Распорный узел 40 включает в себя распорку 42 и держатель 44 распорки. Держатель 44 распорки вмещается в пробку 34, и распорка 42 вмещается в держатель 44 распорки. Держатель 44 распорки включает в себя первый резьбовой участок 46, который входит в зацепление с соответствующим резьбовым участком пробки 34, хотя можно использовать другие подходящие конструкции. Распорка 42 также включает в себя резьбовой участок 48, который входит в зацепление с соответствующим вторым резьбовым участком 50 держателя 44 распорки для закрепления распорки 42 к держателю 44 распорки, хотя можно использовать другие подходящие конструкции. Узел 12 привода выполнен с возможностью дозирования целого ряда предварительно заданных объемов наполнения контейнера 14, при этом с сохранением функциональных признаков вышеописанной системы 10, включая, но без ограничения, втягивание иглы 28 после окончания введения дозы и представление индикации состояния системы 10, а также со сведением к минимуму резкого зацепления пробки 34 узлом 12 привода. Узел 12 привода выполнен с возможностью дозирования множества диапазонов дискретных объемов наполнения благодаря использованию множества размеров распорки 42. В одном аспекте предусмотрено двенадцать диапазонов объемов наполнения и двенадцати размеров распорки 42. В одном аспекте длину распорки 42 изменяют, чтобы обеспечивать разные объемы наполнения в контейнере 14. В качестве альтернативы, можно использовать распорку 42 одного размера с множеством объемов наполнения в контейнере 14, обеспечиваемых применением множества шайб, которые вмещаются в распорку 42.
[00149] Как показано на фиг. 17-26, узел 12 привода включает в себя первый плунжерный элемент 52, второй плунжерный элемент 54, вмещаемый в первый плунжерный элемент 52, первый смещающий элемент 56, второй смещающий элемент 58, элемент 60 привода плунжера и шагово-поворотный элемент 62. Первый плунжерный элемент 52 является перемещаемым из положения перед использованием (показанного на фиг. 18), в положение использования (показанное на фиг. 19), в положение после использования (показанное на фиг. 20), при этом первый плунжерный элемент 52 выполнен с возможностью входа в зацепление с распорным узлом 40 и перемещения пробки 34 внутри контейнера 14, чтобы дозировать лекарственный препарат из контейнера 14. Первый плунжерный элемент 52 выполнен с возможностью аксиального перемещения. Второй плунжерный элемент 54 и первый плунжерный элемент 52 формируют телескопическую конструкцию, при этом второй плунжерный элемент 54 выполнен с возможностью аксиального перемещения после того, как первый плунжерный элемент 52 перемещается на предварительно заданное аксиальное расстояние. Перемещение первого и второго плунжерных элементов 52, 54 обеспечивается первым и вторым смещающими элементами 56, 58, которые являются пружинами сжатия, хотя для смещающих элементов 56, 58 можно использовать другие подходящие конструкции.
[00150] Первый смещающий элемент 56 вмещен во второй плунжерный элемент 54 и заключен между элементом 60 привода плунжера (и шагово-поворотным элементом 62) и первым гнездом 64 пружины второго плунжерного элемента 54. Второй смещающий элемент 58 расположен радиально внутри относительно первого смещающего элемента 56 и вмещен во второй плунжерный элемент 54. Второй смещающий элемент 58 заключен между вторым гнездом 66 пружины второго плунжерного элемента 54 и первым плунжерным элементом 52. Второй смещающий элемент 58 выполнен с возможностью смещения первого плунжерного элемента 52 к контейнеру 14 из положения перед использованием в положение использования и в положение после использования. Первый смещающий элемент 56 выполнен с возможностью смещения второго плунжерного элемента 54 к контейнеру 14, что, в свою очередь, смещает первый плунжерный элемент 52 к контейнеру 14 из положения перед использованием в положение использования и в положение после использования. В частности, второй смещающий элемент 58 выполнен с возможностью приведения в движение первого плунжерного элемента 52 против сопротивления распорного узла 40 или пробки 34, чтобы перемещать контейнер 14 в зацепление с клапанным узлом 16, с прокалыванием, тем самым, крышки 36 контейнера 14 и установки контейнера 14 в состояние сообщения по текучей среде с иглой 28. Первый смещающий элемент 56 выполнен с возможностью перемещения пробки 34 внутри контейнера 14, чтобы дозировать лекарственный препарат из контейнера 14. Второй смещающий элемент 58 имеет иной коэффициент жесткости пружины, чем первый смещающий элемент 56. В частности, второй смещающий элемент 58 превосходит по жесткости первый смещающий элемент 56, чтобы обеспечивать значительное усилие для прокалывания крышки 36 контейнера 14, тогда как первый смещающий элемент 56 развивает меньшее усилие для дозирования, подходящее к вязкости текучей среды или лекарственного препарата внутри контейнера 14.
[00151] Как также показано на фиг. 17-26, элемент 60 привода плунжера имеет кольцевой участок 68 и шпиндельный участок 70. Элемент 60 привода плунжера является вращательно перемещаемым относительно первого плунжерного элемента 52 между первым угловым положением и вторым угловым положением, отстоящим от первого углового положения. Первое угловое положение может отстоять на 15 градусов от второго углового положения, хотя можно использовать другие подходящие положения. Кольцевой участок 68 включает в себя ведущую поверхность 72, включающую в себя множество зубьев 74, хотя для ведущей поверхности 72 можно использовать другие подходящие конструкции. Шпиндельный участок 70 включает в себя поверхность 76 фиксации привода, предназначенную для зацепления и расцепления с поверхностью 78 фиксации плунжера первого плунжерного элемента 52. Поверхность 78 фиксации плунжера включает в себя множество выступов 80, выполненных с возможностью вмещения во множество пазов или прорезей 81, образованных поверхностью 76 фиксации привода.
[00152] Как показано на фиг. 18 и 23, в первом угловом положении элемента 60 привода плунжера множество выступов 80 и множество пазов или прорезей 81 рассогласованы так, что элемент 80 привода плунжера зацепляется с первым плунжерным элементом 52, чтобы предотвращать перемещение первого и второго плунжерных элементов 52, 54 под действием первого и второго смещающих элементов 56, 58, отжимающих первый и второй плунжерные элементы 52, 54 от элемента 60 привода плунжера. Как показано на фиг. 19 и 24, во втором угловом положении элемента 60 привода плунжера, множество выступов 80 и множество пазов или прорезей 81 совмещены друг с другом так, что элемент 60 привода плунжера расцепляется с первым плунжерным элементом 52, чтобы допустить перемещение первого и второго плунжерных элементов 52, 54 и начать, тем самым, процесс дозирования из контейнера 14.
[00153] Как показано на фиг. 7 и 33, ведущая поверхность 72 элемента 60 привода плунжера выполнена с возможностью зацепления участком приводного узла 18 иглы. После приведения в действие исполнительной кнопки 26 и высвобождения приводного узла 18 иглы, что подробно описано ниже, приводной узел 18 иглы перемещается внутри корпуса 20 из положения перед использованием в положение использования и в положение после использования. Во время начального перемещения приводного узла 18 иглы, участок приводного узла 18 иглы входит в зацепление с ведущей поверхностью 72 элемента 60 привода плунжера, чтобы переместить элемент 60 привода плунжера из первого углового положения во второе угловое положение. Как показано на фиг. 33, наклоненный пластинчатый участок 82 приводного узла 18 иглы зацепляет ведущую поверхность 72 элемента 60 привода плунжера, чтобы произвести поворот элемента 60 привода плунжера.
[00154] Как показано на фиг. 11, 13 и 26, второй плунжерный элемент 52 включает в себя множество кодированных выступов 84, при этом предварительно выбранный один из множества кодированных выступов 84 выполнен с возможностью зацепления ограничивающего элемента 86 системы 10. Как подробно описано ниже, ограничивающий элемент 86 взаимодействует с приводным узлом 18 иглы и ограничивает перемещение приводного узла 18 иглы из положения использования в положение после использования, пока пробкой 34 не достигается предварительно заданное положение окончания введения дозы. В одном аспекте, ограничивающий элемент 86 выполнен с возможностью ограничения аксиального перемещения приводного узла 18 иглы из положения использования посредством зацепления между ограничивающим элементом 86 и участком приводного узла 18 иглы. Такое зацепление между ограничивающим элементом 86 и приводным узлом 18 иглы расцепляется при повороте ограничивающего элемента 86, когда пробка 34 достигает положения окончания введения дозы. В положении использования приводного узла 18 иглы, ограничивающий элемент 86 смещается в направление поворота, при этом поворот ограничивающего элемента 86 блокируется зацеплением между ограничивающим элементом 86 и одним из множества кодированных выступов 84 второго плунжерного элемента 54. Множество кодированных выступов 84 может представлять собой аксиальные ребра разной длины, хотя можно использовать другие подходящие конструкции. Каждый кодированный выступ 84 определяет точку, в которой ограничивающий элемент 86 имеет возможность поворачиваться с высвобождением, тем самым, приводного узла 18 иглы. Гладкий участок второго плунжерного элемента 52 может также обеспечивать дополнительный «код» для определения, когда система 10 переходит в положение окончания введения дозы.
[00155] Как изложено выше, индикаторное устройство 32 перемещается, обеспечивая при этом наблюдаемость разных участков индикаторного устройства 32 через индикаторное окно 30, по мере того, как система 10 перемещается из положения перед использованием в положения использования и после использования или окончания введения дозы. В частности, индикаторное устройство 32 входит в зацепление с участком ограничивающего элемента 86 и перемещается вместе с ограничивающим элементом 86 по различным стадиям системы 10, чтобы предоставлять пользователю индикацию состояния системы 10.
[00156] Во время сборки системы 10, дозу в контейнере 14 согласуют с конкретной распоркой 42, имеющей установленную длину, и соответствующий один из множества кодированных выступов 84 согласуют с ограничивающим элементом 86. Соответственно, как изложено выше, контейнер 14 можно снабжать множеством объемов дозировки, при этом каждый объем соответствует конкретной распорке 42 и кодированному выступу 84. Таким образом, даже при разных объемах дозировки, система 10 выполнена с возможностью введения иглы 28 в пользователя, чтобы доставить дозу лекарственного препарата из контейнера 14, отвести иглу 28 после окончания введения дозы и обеспечить индикацию состояния системы 10, при сведении к минимуму резкого зацепления пробки 34 узлом 12 привода. В частности, размер пробки 34 можно подобрать, чтобы свести к минимуму расстояние между первым плунжерным элементом 52 и распорным узлом 40 и не нуждаться в применении демпфирования.
[00157] На фиг. 27-33 показан узел 12A привода в соответствии с дополнительным аспектом настоящего изобретения. Узел 12A привода, показанный на фиг. 27-33, аналогичен вышеописанному узлу 12 привода, показанному на фиг. 17-26, и действует таким же образом. Однако, в узле привода, показанном на фиг. 27-33, первый плунжерный элемент 52 вмещается во второй плунжерный элемент 54 и продолжается из второго плунжерного элемента 54 во время аксиального перемещения из положения перед использованием в положение использования. Кроме того, первый плунжерный элемент 52 включает в себя выдвижной участок 88, выполненный с возможностью входа в зацепление со вторым плунжерным элементом 54 после того, как первый плунжерный элемент 52 перемещается на предварительно заданное аксиальное расстояние, чтобы первый и второй плунжерные элементы 52, 54 перемещались вместе. Первый и второй смещающие элементы 56, 58 контактируют с первым и вторым плунжерными элементами 52, 54 и действуют на них таким же образом, как в узле 12 привода, показанном на фиг. 17-26.
[00158] Как показано на фиг. 27-32, шагово-поворотный элемент 62 расположен вокруг первого и второго плунжерных элементов 52, 54 и включает в себя множество храповых зубьев 90, выполненных с возможностью входа в зацепление с гибкой пластинкой 92, расположенной на нижнем участке 24 корпуса 20. Когда узел 12, 12A привода установлен в нижний участок 24 корпуса 20, зацепление храповых зубьев 90 шагово-поворотного элемента 62 с гибкой пластинкой 92 корпуса 20 обеспечивает однонаправленный поворот шагово-поворотного элемента 62. Шагово-поворотный элемент 62 выполнен с возможностью поворота для совмещения одного из кодированных выступов 84 второго плунжерного элемента 52 с ограничивающим элементом 86, исходя из объема дозировки и размера распорки 42, как изложено выше. Шагово-поворотный элемент 62 может обеспечить 24 угловых положения узла 12, 12A привода, из которых 12 положений могут иметь специфические дозовые значения, которые соответствуют им.
[00159] На фиг. 1-16 и 34-40B показан приводной узел 18 иглы в соответствии с одним аспектом настоящего изобретения. Приводной узел 18 иглы включает в себя приводной блок 96 иглы, имеющий направляющие поверхности 98, челнок 102 иглы, имеющий кулачковые поверхности 104, и иглу 28, вмещенную в челнок 102 иглы и выполненную с возможностью сообщения по текучей среде с контейнером 14, как изложено выше. Приводной блок 96 иглы является, в общем, прямоугольным, с направляющими поверхностями 98, продолжающимися радиально внутрь. Челнок 102 иглы вмещается внутри приводного блока 96 иглы. Как описано выше, приводной блок 96 иглы является перемещаемым внутри корпуса 20 из положения перед использованием (показанного на фиг. 4-6) в положение предварительного срабатывания (фиг. 7-9), положение использования (фиг. 10-12) и положение после срабатывания (фиг. 13-15). Приводной блок 96 иглы смещается из положения перед использованием в положение после использования посредством пружины 106 растяжения, хотя можно использовать другие подходящие смещающие конструкции. Приводной блок 96 иглы высвобождается и может свободно перемещаться из положения перед использованием в положение использования после приведения в действие исполнительной кнопки 26, что подробно описано ниже. Приводной блок 96 иглы перемещается из положения использования в положение после использования после поворота ограничивающего элемента 86, как изложено выше в связи с фиг. 17-33.
[00160] Как показано на фиг. 34-40B, челнок 102 иглы является перемещаемым вдоль вертикальной оси между втянутым положением, в котором игла 28 расположена внутри корпуса 20 и выдвинутым положением, в котором, по меньшей мере, участок иглы 28 выдвигается из корпуса 20. Челнок 102 иглы выполнен с возможностью перемещения между втянутым положением и выдвинутым положением благодаря зацеплению между направляющими поверхностями 98 приводного блока 96 иглы и кулачковыми поверхностями 104 челнока 102 иглы. Кулачковые поверхности 104 обеспечены посредством первого и второго кулачковых элементов 108, 110, при этом первый кулачковый элемент 108 разнесен со вторым кулачковым элементом 110. Корпус 20 включает в себя направляющую стойку 112, содержащую углубление, выполненное с возможностью вмещения T-образного выступа 114 на челноке 102 иглы, хотя для направляющей стойки 112 и T-образного выступа 114 можно использовать другие формы и конфигурации. Челнок 102 иглы перемещается вдоль направляющей стойки 112 между втянутым и выдвинутым положениями. Направляющая стойка 112 является прямолинейной и продолжается, приблизительно, перпендикулярно из корпуса 20, хотя можно использовать другие подходящие конструкции. Направляющие поверхности 98 приводного блока 96 иглы являются непрямолинейными и содержат, каждая, первую сторону 116 и вторую сторону 118, расположенную противоположно первой стороне 116.
[00161] Как описано ниже, направляющие поверхности 98 приводного блока 96 иглы взаимодействуют с кулачковыми элементами 108, 110 челнока 102 иглы, чтобы перемещать челнок 102 иглы вертикально между втянутым и выдвинутыми положениями, когда приводной блок 96 иглы перемещается аксиально из положения перед использованием в положение после использования. Челнок 102 иглы включает в себя также смещающий элемент 120 челнока, выполненный с возможностью зацепления корпуса 20 или исполнительной кнопки 26. В частности, смещающий элемент 120 челнока находится в зацеплении с корпусом 20 или исполнительной кнопкой 26 и обеспечивает смещающее усилие, когда приводной блок 96 иглы переходит из положения использования в положение после использования. Когда приводной блок 96 иглы полностью переходит в положение после использования, кулачковые элементы 108, 110 челнока 102 иглы выходят из зацепления с направляющими поверхностями 98 приводного блока 96 иглы, и смещающий элемент 120 челнока смещает челнок 102 иглы вниз, чтобы игла 28 вошла в контакт с подкладкой 38, как изложено выше. Однако, как изложено выше в связи с фиг. 1-16, подкладка 38 также может смещаться в иглу 28 вместо смещения челнока 102 иглы вниз смещающим элементом 120 челнока. Приводной блок 96 иглы может взаимодействовать с исполнительной кнопкой 26, чтобы не допускать выталкивания исполнительной кнопки 26 назад, пока не достигнуто положение после использования, что подробно описано ниже.
[00162] Как показано на фиг. 37A-40B, в положении перед использованием (фиг. 37A), челнок 102 иглы находится в втянутом положении, при этом кулачковые элементы 108, 110 отстоят от направляющей поверхности 98 приводного блока 96 иглы. Когда приводной блок 96 иглы перемещается в положение использования (фиг. 37B и 38A), второй кулачковый элемент 110 челнока 102 иглы входит в зацепление со второй стороной 118 направляющих поверхностей 98, чтобы переместить челнок 102 иглы из втянутого положения в выдвинутое положение. Во время перевода из положения использования в положение после использования приводного блока 96 иглы (фиг. 37C), первый кулачковый элемент 108 челнока 102 иглы входит в зацепление с первой стороной 116 направляющих поверхностей 98, чтобы переместить челнок 102 иглы из второго положения в первое положение. После того, как приводной блок 96 иглы полностью переведен в положение после использования (фиг. 37D и 38B), смещающий элемент 120 челнока смещает челнок 102 иглы вниз, когда кулачковые элементы 108, 110 выходят из зацепления с направляющими поверхностями 98 приводного блока 96 иглы, при этом игла 28 входит в зацепление с подкладкой 38. Перевод приводного блока 96 иглы и соответствующее положение челнока 102 иглы показано также на фиг. 39-40B. Взаимодействие между исполнительной кнопкой 26 и приводным блоком 96 иглы подробно описано в связи с фиг. 65A-67. На фиг. 41-64 показана система 200 доставки лекарств в соответствии с дополнительным вариантом осуществления. Система 200 включает в себя корпус 202, содержащий верхний корпус 204 и нижний корпус 206. Корпус имеет проксимальный конец 205 и дистальный конец 207. Верхний корпус 204 содержит порт 208 наблюдения состояния, так что пользователь может наблюдать рабочее состояние системы 200. Система 200 содержит также клапанный узел 212, трубку 214, соединяющую по текучей среде клапанный узел 214 с иглой 215 для пациента, которая расположена на проксимальном конце кронштейна 216 иглы. Пружина 218 смещает привод 220 иглы в дистальном направлении.
[00163] Как показано на фиг. 42-46, система 200 дополнительно включает в себя контейнер или контейнер 222 с лекарственным препаратом с пробкой 224, подвижно расположенной в данном контейнере, хотя пробка 224 и не показана на различных фигурах для ясности. В предпочтительном варианте, дистальный конец контейнера 222 с лекарственным препаратом содержит мембранный узел 228, который отстоит от клапанного узла 212 перед приведением в действие устройства 222, как лучше всего показано на фиг. 47.
[00164] В производственных целях часто желательно использовать один размер для контейнера с лекарственным препаратом, даже если предполагается использовать несколько объемов наполнения контейнера или дозировок. В таких случаях, когда заполняют контейнеры с лекарственными препаратами, то, в результате, получают разные объемы наполнения в разных положениях пробки. Чтобы обеспечить такие разные положения пробки, а также обеспечить различия изготовления пробок, аспекты настоящего изобретения включают в себя индивидуальные или заказные распорки 226, размещаемые в проксимальном конце контейнера 222, проксимальные относительно пробки 224. Другими словами, индивидуальная распорка 226 обеспечивает вариант, который допускает дозирование целого ряда предварительно заданных объемов наполнения, устанавливаемых при изготовлении, посредством выбора разных распорок 226 и снижает или исключает потребность в операциях изменения конфигурации узла. Размер распорки 226 можно использовать для учета недозаполненных объемов контейнера 222 и обеспечения подходящей опорной поверхности на проксимальном конце контейнера.
[00165] Распорку 226 подбирают из множества распорок 226 разных размеров, чтобы занимать пространство от проксимального конца пробки 224 до проксимального конца контейнера 222. В соответствии с одним вариантом осуществления, как показано на фиг. 45-47, распорку 226 выбирают так, чтобы она была по существу заподлицо с проксимальным концом контейнера 222. Кроме того, в соответствии с одним вариантом осуществления, распорка 226 имеет форму «цилиндра», который содержит центральную стойку 230 и дистальный фланец 232, как лучше всего показано на фиг. 45.
[00166] Как показано на фиг. 44-47, система 200 также включает в себя узел 234 привода для дистального смещения контейнера 222, чтобы создать соединение по текучей среде между контейнером 222 и иглой 215 для пациента, а также дозировать лекарственный препарат из контейнера 222. Более подробно, узел 234 привода включает в себя внутреннюю пружину 236, расположенную внутри центрального плунжера 238, внешний плунжер 240, внешнюю пружину 242, расположенную между центральным плунжером 238 и внешним плунжером 240, телескопический элемент 244 и деблокирующую задвижку 246.
[00167] В предпочтительном варианте, внутренняя пружина 236 имеет более высокий коэффициент жесткости пружины, чем внешняя пружина 242, и поэтому является большее сильной или жесткой, чем внешняя пружина 242. Внутренняя пружина 236 расположена внутри центрального плунжера 238 и работает на разжим между фланцем 248 пружины в нижнем корпусе (лучше всего показанном на фиг. 46) и центральным плунжером 238, который давит непосредственно на проксимальный конец распорки 226 после приведения в действие устройства. Внешняя пружина 242 расположена внутри внешнего плунжера 240 и работает на разжим между проксимальным внешним фланцем 250 центрального плунжера 238 и дистальным внутренним фланцем 252 внешнего плунжера 240. Таким образом, внутренняя и внешняя пружины 236 и 242 вложены одна в другую и могут обеспечить более компактный узел привода (и, следовательно, более компактную систему 200), чем при использовании единственной пружины.
[00168] В соответствии с одним аспектом, внутренняя пружина 236 выполняет только функцию смещения контейнера 222, чтобы создать соединение по текучей среде с иглой 215 для пациента, и внешняя пружина 242 выполняет только функцию последующего дозирования лекарственного препарата из контейнера 222. В соответствии с другим аспектом, внутренняя пружина 236 выполняет функцию смещения контейнера 222, чтобы создать соединение по текучей среде с иглой 215 для пациента, а также выполняет функцию начала дозирования лекарственного препарата из контейнера 222, и внешняя пружина 242 выполняет функцию завершения дозирования лекарственного препарата. В соответствии с дополнительным аспектом, внутренняя пружина 236 вынуждает первоначальное прокалывание контейнера 222, при этом внешняя пружина 242 завершает прокалывание и дозирование лекарственного препарата из контейнера 222.
[00169] Как показано на фиг. 44-47 и подробно описано в последующем, внешний плунжер 240 включает в себя пару проксимальных фланцев или ножек 254, которые имеют каждый(ая) скошенную поверхность, которая взаимодействует с соответствующей скошенной поверхностью (или поверхностями) на деблокирующей задвижке, чтобы удерживать и затем отпускать силовой модуль после приведения в действие устройства 200.
[00170] Как лучше всего показано на фиг. 46 и 47, в первоначально собранном состоянии, контейнер 222 расположен с зазором от узла 234 привода и клапанного узла 212. Боковой фланец 256 на приводе 220 иглы аксиально удерживает контейнер 222 с лекарственным препаратом, и привод 220 иглы предотвращает поперечное смещение деблокирующей задвижки 246. В соответствии с одним вариантом осуществления, пружина (не показанная) смещает привод 220 иглы в дистальном направлении, но исполнительная кнопка 210 (и/или связанный с ней узел) предотвращает дистальное смещение привода 220 иглы перед приведением в действие устройства 200. Лента 258 состояния расположена на приводе 220 иглы и имеет верхнюю поверхность, которая наблюдается через порт 208 наблюдения состояния. В соответствии с одним вариантом осуществления, верхняя поверхность ленты состояния имеет множество цветов или рисунков, и, когда устройство находится в состоянии перед приведением в действие, через порт 208 наблюдения состояния виден первый цвет или рисунок, например, желтый.
[00171] Фиг. 48-52 являются видами сверху системы 200, поясняющими выполнение действий на стадии приведения в действие системы 200 и после этого. Как показано на фиг. 47, пользователь сдвигает исполнительную кнопку 210 в проксимальном направлении и затем смещает кнопку 210 вертикально в корпус 202, с освобождением, тем самым, привода 220 иглы для его дистального смещения под действием пружины (не показанной для ясности). Как показано на фиг. 49, когда привод иглы смещается дистально, направляющие канавки 260 на приводе 220 иглы взаимодействуют с боковыми выступами 262 на кронштейне 216 иглы, чтобы вводить иглу 215 для пациента. На данной стадии, проксимальный конец привода 220 иглы, предпочтительно, еще не освободил деблокирующую задвижку 246, и, следовательно, узел 234 привода еще не деблокирован. Но боковой фланец 256 сместился дистально, и поэтому контейнер 222 не удерживается.
[00172] Затем, как показано на фиг. 50 и 51, при продолжающемся дистальном смещении, проксимальный конец привода 220 иглы освобождает деблокирующую задвижку 246 (с освобождением, тем самым, узла 234 привода). Привод 220 иглы временно приостанавливается при упоре в конструктивный элемент на поворотной запорно-отпускающей пластине 264, с доведением запорно-отпускающей пластины 264 впритык к вынесенному упору 266 (лучше всего показанному на фиг. 44 и 59) телескопического элемента 244. Привод 220 иглы остается в этом положении, пока дозируется лекарственный препарат. В данном положении, через порт 208 наблюдения состояния просматривается, предпочтительно, второй цвет или рисунок ленты 258 состояния, например, зеленый.
[00173] На данной стадии, усилие пружин 236 и 242 и взаимодействие скошенных поверхностей проксимальных фланцев или ножек 254 с соответствующей скошенной(ыми) поверхностью (или поверхностями) на деблокирующей задвижке 246 вынуждает деблокирующую задвижку 246 сместиться вбок, с высвобождением, тем самым, внешнего плунжера 240 из задерживающего взаимодействия с деблокирующей задвижкой 246. До этого момента внешний плунжер 240 удерживал центральный плунжер 238.
[00174] Как показано на фиг. 52 и 53 (внутренняя пружина 236 не показана на фиг. 52 для ясности), жесткая внутренняя пружина 236 двигает центральный плунжер 238 в дистальном направлении до контакта с распоркой 226. Поскольку контейнер 222 с лекарственным препаратом наполнен, по существу, несжимаемой текучей средой, то продолжающееся дистальное смещение центрального плунжера 238 смещает в дистальном направлении распорку 226, пробку 224 и контейнер 222 относительно корпуса 202. Данное дистальное смещение приводит к прокалыванию мембранного узла 228 клапанным узлом 212, с созданием сообщения по текучей среде между контейнером 222 и иглой 215 для пациента. Центральный плунжер 238 двигается в дистальном направлении, пока его проксимальный внешний фланец 250 (лучше всего показанный на фиг. 59) не приходит в контакт с фланцем на нижнем корпусе 206, что ограничивает «ход прокалывания». В предпочтительном варианте, другой фланец на нижнем корпусе 206 и/или боковой фланец 256 привода 220 иглы ограничивает ход контейнера 222 в дистальном направлении.
[00175] После этого, поскольку внутренняя пружина 236 больше не может дистально смещать центральный плунжер 238, то более мягкая внешняя пружина 242 дистально смещает внешний плунжер 240 относительно центрального плунжера 238 до контакта с дистальным фланцем 232 распорки 226, как показано на фиг. 54 и 55. Как подробно описано в последующем, контакт между внешним плунжером 240 и распоркой 226 предпочтительно демпфируется, чтобы минимизировать ударное воздействие. Дальнейшее расширение внешней пружины 242 дистально смещает внешний плунжер 240, чтобы дозировать лекарственный препарат.
[00176] Как показано на фиг. 56 и 57, по мере того, как внешняя пружина 242 продолжает расширяться и дистально смещать внешний плунжер 240, после предварительного заданного дистального смещения внешнего плунжера 240 относительно телескопического элемента 244, внешний конструктивный элемент или фланец 268 внешнего плунжера 240 взаимодействует с внутренним дистальным конструктивным элементом или фланцем 270 телескопического элемента 244 и «захватывает» телескопический элемент 244. Данный «захват» обеспечивает то, что дальнейшее дистальное смещение внешнего плунжера 240 вызывает соответствующее дистальное смещение телескопического элемента 244. Данное спаренное дистальное смещение продолжается до конца дозирования лекарственного препарата.
[00177] Как отмечалось выше, вынесенный упор 266 расположен на телескопическом элементе 244. Аксиальная длина вынесенного упора и ход телескопического элемента 144 в дистальном направлении регулирует синхронизацию расцепления вынесенного упора 266 с запорно-отпускающей пластиной 264. Как показано на фиг. 58 и 59, в конце дозирования лекарственного препарата, проксимальный конец вынесенного упора 266 обходит запорно-отпускающую пластину 264. Это позволяет запорно-отпускающей пластине 264 выйти поворотом из зацепления с приводом 220 иглы (фиг. 60) и позволяет приводу 220 иглы продолжить его дистальное смещение и отвести иглу 215 для пациента (фиг. 61). На данной стадии, через порт 208 наблюдения состояния виден другой цвет или рисунок ленты 258 состояния, например, красный, означающий, что устройство 200 завершило работу.
[00178] Как отмечалось выше и показано на фиг. 62 и 63, контакт между внешним плунжером 240 и распоркой 226 предпочтительно демпфируется, чтобы минимизировать ударное воздействие. Максимальная степень рассеяния энергии требуется для недозаполненных шприцов, содержащих вязкую текучую среду, так как внешняя пружина 242 будет более жесткой для обеспечения требуемых скоростей дозирования. Минимальная степень рассеяния энергии требуется для максимально заполненных шприцов, содержащих маловязкую текучую среду, так как внешняя пружина может быть менее жесткой для обеспечения требуемых скоростей дозирования. Для регулирования уровней демпфирования можно использовать различные способы, например, пневматическое демпфирование или демпфирование пеноматериалом с закрытыми порами.
[00179] В качестве другого способа демпфирования, на фиг. 64 изображен вариант осуществления распорки 226, на которой по окружности расставлены одно или более аксиальных контактирующих ребер 272 вокруг центральной стойки 230 распорки 226. В данном варианте осуществления внешний плунжер 240 должен продвигаться по контактирующим ребрам 272, что создает фрикционное сопротивление дистальному смещению внешнего плунжера 240 относительно распорки 226. Сила сопротивления, создаваемая взаимодействием между контактирующими ребрами 272 и внешним плунжером 240, не зависит от скорости плунжера. Сила сопротивления, предпочтительно, не превосходит минимальной нагрузки дозирующей пружины во избежание застопоривания слабых пружин. Взаимодействие можно настраивать, чтобы обеспечивать требуемый уровень фрикционного сопротивления. Для разных вязкостей текучих сред можно применить контактирующие ребра 272 разных (аксиального и/или радиального) размеров. Это может означать применение индивидуальной или заказной распорки для каждого сочетания вязкости и уровня заполнения, или, в зависимости от числа пружин, требующихся для диапазона вязкости, может существовать несколько настраиваемых положений, в соответствие с чем распорка может быть установлена в конкретное положение для конкретной типовой пружины (для положения характерно взаимодействие/демпфирование, настроенное для данного конкретного сочетания нагрузки пружины/вязкости).
[00180] На фиг. 65A-69 показана конструкция 280 исполнительной кнопки для приведения в действие системы 10 в соответствии с одним аспектом настоящего изобретения. Конструкция 280 исполнительной кнопки включает в себя исполнительную кнопку 26, пружину 284 кнопки и приводной блок 286 иглы. Приводной блок 286 иглы может быть аналогичен приводным блокам 96, 220 иглы, описанным выше, и выполнен с возможностью перемещения внутри корпуса 20, чтобы переводить челнок 102 иглы или иглу 28 между втянутым и выдвинутым положениями. Как показано на фиг. 69, исполнительная кнопка 26 включает в участок 288 пользовательского интерфейса для взаимодействия с пользователем. Участок 288 пользовательского интерфейса предпочтительно имеет длину около 22 мм и ширину около 10 мм, хотя можно использовать другие подходящие размеры. Исполнительная кнопка 26 включает в себя две пары блокирующих лапок 290, 292, которые взаимодействуют с поверхностями 294, 296 контакта с кнопкой на приводном блоке 286 иглы до приведения устройства в действие, чтобы препятствовать качанию вверх приводного блока 286 иглы. Как показано на фиг. 65H, взаимное наложение приводного блока 286 иглы и корпуса 20 предотвращает преждевременное срабатывание. Как показано на фиг. 66, пружина 284 кнопки включает в себя первую опорную поверхность 298 и вторую опорную поверхность 300, отстоящую от первой опорной поверхности 298, и консольную центральную пружинную лапку 302, окруженную парой внешних лапок 304, которые соединены первой опорной поверхностью 298.
[00181] Конструкция 280 исполнительной кнопки выполнена с возможностью обеспечения одной или более следующих функций, которые подробно описаны ниже: однонаправленного аксиального смещения или сдвига исполнительной кнопки 26; поперечного перемещения (в приподнятое и нажатое положения) исполнительной кнопки 26, при этом исполнительная кнопка 26 остается нажатой в положении использования приводного блока 286 иглы; и блокировки исполнительной кнопки 26 в положении после использования приводного блока 286 иглы, так что кнопка 26 находится в приподнятом положении и не может быть нажата пользователем.
[00182] Для приведения в действие системы 10 с помощью исполнительной кнопки 26, пользователь сначала сдвигает участок 288 пользовательского интерфейса в первом аксиальном направлении, показанном как находящееся справа на фиг. 65G и 65H. Пользователю может потребоваться сдвинуть участок 288 пользовательского интерфейса на приблизительно 10 мм или приблизительно 8 мм, хотя можно использовать другие подходящие расстояния. Перемещение исполнительной кнопки 26 аксиально перемещает блокирующие лапки 290, 292, чтобы освободить поверхности 294, 296 контакта с кнопкой на приводном блоке 286 иглы и обеспечить возможность перемещения исполнительной кнопки 26 из приподнятого положения в нажатое положение.
[00183] Когда пользователь сдвигает в дистальном правлении участок 288 пользовательского интерфейса, центральная пружинная лапка 302 пружины 284 кнопки сдвигается по опорной поверхности 306 под пружинную лапку на корпусе 20, при этом первая и вторая опорные поверхности 298, 300 находятся в зацеплении с первой и второй опорными наклонными поверхностями 308, 310 на корпусе 20. Усилия, действующие на пружину 284 кнопки, уравновешиваются посредством зацепления с опорной поверхностью 306 под пружинную лапку и первой и второй опорными наклонными поверхностями 308, 310, чтобы обеспечить плавное смещение или сдвиг исполнительной кнопки 26.
[00184] Когда исполнительная кнопка 26 и пружина 284 кнопки достигают конца хода их аксиального сдвига, центральная пружинная лапка 302 и первая опорная поверхность 298 проходят конец соответствующих упоров 312, 314, чтобы заблокировать исполнительную кнопку 26 от сдвига назад в ее первоначальное положение, как показано на фиг. 65H. Кроме того, когда исполнительная кнопка 26 и пружина 284 кнопки достигают конца хода их аксиального сдвига, пользователь касается участка 288 пользовательского интерфейса, чтобы переместить исполнительную кнопку 26 вниз в ее нажатое положение. Исполнительную кнопку 26 можно нажать на приблизительно 2 мм, и минимальное усилие, необходимое для нажатия исполнительной кнопки 26, составляет около 3 Н, и, предпочтительнее всего, около 2,8 Н, хотя можно использовать другие подходящие расстояния и минимальные усилия.
[00185] Когда пользователь вжимает участок 288 пользовательского интерфейса, показанный на фиг. 65A и 65B, исполнительная кнопка 26 поворачивает приводной блок 286 иглы, чтобы высвободить приводной блок 286 иглы и, тем самым, позволяет приводному блоку 286 иглы переместиться из положения перед использованием в положение использования. Как показано на фиг. 65B, когда приводной блок 286 иглы перемещается в положение использования, блокирующие лапки 290, 292 продвигаются вдоль по нижней стороне поверхностей 294, 296 контакта с кнопкой, чтобы препятствовать отскакиванию вверх исполнительной кнопки 26. После того, как лекарственный препарат доставлен, и когда приводной блок 286 иглы переходит из положения использования в положение после использования, показанное на фиг. 65C, блокирующие лапки 290, 292 выходят из зацепления с поверхностями 294, 296 контакта с кнопкой, что позволяет исполнительной кнопке 26 отскочить обратно вверх под действием пружины 284 кнопки. После того, как приводной блок 286 иглы полностью переходит в положение после использования, показанное на фиг. 65D, исполнительная кнопка 26 закончила перемещение из нажатого положения в приподнятое положение под действием смещающего усилия пружины 284 кнопки. Когда приводной блок 286 иглы находится в положении после использования, пружинная лапка 316 на приводном блоке 286 иглы входит в зацепление с исполнительной кнопкой 26, чтобы заблокировать исполнительную кнопку 26 от перемещения в нажатое положение в то время, когда аксиальное перемещение по-прежнему ограничено зацеплением пружинной лапки 302 с упорами 312, 314. Таким образом, исполнительная кнопка 26 блокируется после того, как доставка лекарственного препарат заканчивается, чтобы представлять четкое отличие между использованной системой и неиспользованной системой.
[00186] Кроме того, если пользователь удерживает исполнительную кнопку 26 нажатой во время дозирования лекарственного препарата, правильное дозирование и втягивание будут выполняться по-прежнему, но исполнительная кнопка 26 не отскочит обратно вверх в приподнятое положение, пока кнопка 26 не будет освобождена.
[00187] В одном аспекте пружина 284 кнопки изготовлена из пластика. Пружина 284 кнопки может быть также штампованной металлической пружиной, хотя можно использовать любой другой подходящий материал.
[00188] Как показано на фиг. 68A-68G, вместо обеспечения раздельных исполнительной кнопки 26 и пружины 284 кнопки, пружину можно выполнить за одно целое с кнопкой 26. В частности, исполнительная кнопка 320 в соответствии с дополнительным аспектом настоящего изобретения включает в себя неразъемную пружинную лапку 322. Исполнительная кнопка 320 включает в себя также блокирующие лапки 324, удерживающие лапки 326 и заднюю пяту 328. Как показано на фиг. 68D и 68E, пружинная лапка 322 находится в зацеплении с зубьями 330 на верхнем участке 22 корпуса 20. Во время перехода системы 10 из положения перед использованием в положение использования, пружинная лапка 322 сдвигается мимо упора зубьев 330, с обеспечением аксиального пружинного усилия. Конец пружинной лапки 322 находится в зацеплении с участком верхнего участка 22 корпуса 20, чтобы обеспечивать вертикальное пружинное усилие, когда пружинная лапка 322 отклоняется. Исполнительная кнопка 320 выполнена с возможностью плавного движения между перемещениями сдвига и снижения кнопки 320, даже если происходят два отдельных движения, что аналогично работе вышеописанной кнопки 26. Во время перехода между положением перед использованием и положением использования кнопка 320 поворачивается вокруг задней пяты 328, при этом удерживающая лапка 326 находится в зацеплении с участком приводного блока 286 иглы и, тем самым, сохраняет нажатое положение кнопки 320, пока не достигается положение окончания введения дозы, подобно тому, как в случае исполнительной кнопки 26. Блокирующие лапки 324 отклоняются внутрь и входят в зацепление с участком приводного блока 286 иглы, когда приводной блок 286 иглы перемещается в положение окончания введения дозы, с предотвращением, тем самым дальнейшего движения исполнительной кнопки 320, подобно тому, как в случае вышеописанной исполнительной кнопки 26.
[00189] Аспекты настоящего изобретения обеспечивают усовершенствования по сравнению с предыдущими конструкциями кнопок. Например, конструкция 280 исполнительной кнопки обеспечивает несколько поверхностей для удерживания приводного блока 286 иглы на месте вплотную к пружине 106 привода иглы до приведения в действие, что снижает вероятность преждевременного срабатывания от удара при падении. Конструкция 280 исполнительной кнопки физически препятствует перемещению приводного блока 286 иглы до приведения в действие посредством удержания его в наклонном (фиксированном) состоянии таким образом, что поверхности не имеют места для разделения и преждевременного срабатывания.
[00190] Кроме того, благодаря применению изгибающейся лапки вместо применения простого буферного упора точнее регулируются усилия сдвига кнопки конструкции 280 исполнительной кнопки. Это допускает удлинение ходов сдвига кнопки 26, при более точном регулировании усилий, что приводит к более эргономичной конструкции. Кроме того, конструкция 280 исполнительной кнопки обеспечивает отскок кнопки 26 обратно наружу в конце инъекции, что дает пользователю дополнительное визуальную, звуковую и тактильную индикацию, что доставка лекарственного препарата закончена.
[00191] В соответствии с одним аспектом, доставляемый объем текучей среды в системе 10 определяется конечным положением плунжера относительно точки внутри корпуса, независимо от фактического объема наполнения, внутреннего диаметра контейнера и начального положения и длины пробки. Вариабельность дозирования может быть значительной потому, что допустимые отклонения вышеупомянутых факторов могут быть весьма большими. Аспекты настоящего изобретения позволяют исключить некоторые или все упомянутые допустимые отклонения из уравнения дозирования, что дает, в результате, более точный и менее вариабельный объем инъекции лекарственного препарата.
[00192] На фиг. 70A-70G показан распорный узел 400 для применения в связи с узлом привода в соответствии с одним аспектом настоящего изобретения.
[00193] Элементы цепочки допустимых отклонений в распорном узле 400 пробки включают в себя толщину (A) фланца 402 внутреннего плунжера 404, внутреннюю длину (B) внешнего плунжера 406 между внутренним проксимальным концом 408 и внутренним заплечиком 410 и первоначальное расстояние (C1) смещения между фланцем 402 внутреннего плунжера и внутренним проксимальным концом 408 внешнего плунжера. Данное первоначальное расстояние (C1) смещения, предпочтительно больше промежутка (C2) между внешним плунжером 406 и проксимальным концом цилиндрической гильзы 412 для лекарственного препарата. Цепочка допустимых отклонений в распорном узле 400 пробки включает в себя также внутренний диаметр (D) цилиндрической гильзы. После сборки, распорка 414 пробки и внешний плунжер 406 являются индивидуальными для данного объема лекарственного препарата.
[00194] Фиг. 70B-70G изображают работу распорного узла 400 пробки. Как показано на фиг. 70B, когда систему приводят в действие, как внутренний, так и внешний плунжеры 404 и 406 высвобождаются. Внешняя пружина 416 вжимает внешний плунжер 406 в цилиндрическую гильзу 412, сжимая демпфирующий материал 418 и внутреннюю пружину 420. Пробка 422 еще не перемещается относительно цилиндрической гильзы 412 из-за наличия столба текучего лекарственного препарата.
[00195] Далее, как показано на фиг. 70C, внешняя пружина 416 дистально смещает внешний плунжер 406 и цилиндрическую гильзу 412, чтобы открыть клапан (не показанный) на дистальном конце цилиндрической гильзы 412, что создает сообщение по текучей среде с иглой (не показанной). Вследствие несжимаемости жидкого лекарственного препарата, пробка 422 не может смещаться относительно цилиндрической гильзы 412, пока не открывается клапан, и не создается путь для текучей среды в иглу для пациента.
[00196] Затем, как показано на фиг. 70D и 70E, внутренняя пружина 420 смещает внутренний плунжер 404, распорку 414 пробки и пробку 422, чтобы дозировать текучую среду.
[00197] Фиг. 70F поясняет окончание доставки лекарственного препарата, когда проксимальный фланец 402 внутреннего плунжера 404 приходит в контакт с внутренним заплечиком 410 внешнего плунжера 406, прекращая, тем самым, смещение внутреннего плунжера 404 (и распорки 414 пробки и пробки 422) относительно цилиндрической гильзы 212 для лекарственного препарата, и останавливая течение лекарственного препарата.
[00198] В соответствии с одним аспектом, как показано на фиг. 70G, прекращение смещения внутреннего плунжера 404 относительно цилиндрической гильзы 212 для лекарственного препарата включает индикатор окончания введения дозы системой.
[00199] Как показано на фиг. 71 и 72, сжимающийся распорный узел 430 включает в себя передний участок 432 распорки, закрепленный к пробке 434, внутренний плунжер 436, задний участок 438 распорки и поворотный челнок 440. Внутренний плунжер 436 может поступательно перемещаться, но не поворачиваться, относительно переднего участка 432 распорки. Аналогично, задний участок 438 распорки также может перемещаться аксиально относительно переднего участка 432 распорки, но не поворачиваться относительно переднего участка 432 распорки. Как подробно описано в последующем, поворотный челнок 440 сначала поворачивается и затем перемещается поступательно.
[00200] В соответствии с одним аспектом, передний участок 432 распорки жестко закреплен к пробке 434. Специалисту в данной области техники будет понятно, что можно использовать много способов закрепления переднего участка 432 распорки к пробке 434, например, приклеивание, механический крепеж или любую другую подходящую конструкцию. Передний участок 432 распорки предпочтительно содержит резьбу, которая находится в зацеплении с ответной резьбой в пробке 434.
[00201] Когда распорный узел 430 пробки вкручен в пробку 434, аксиальная нагрузка прикладывается через отверстия 442 для доступа в заднем участке 438 распорки. Такое усилие можно использовать для нажима на пробку 434 вперед, с приложением давления к текучему лекарственному препарату. Данное давление вынуждает передний (дистальный торец) пробки 434 отклоняться и нажимать в проксимальном направлении, отталкивая назад задний участок 438 распорки и поворачивая поворотный челнок в его «собранное» состояние. Другими словами, когда цилиндрическая гильза для лекарственного препарата заполнена лекарственным препаратом, и плунжер системы прикладывает аксиальное усилие к лекарственному препарату через распорный узел 430, дистальный торец пробки 434 деформируется под действием давления лекарственного препарата. В процессе доставки лекарственного препарата, узлом привода (через посредство плунжера) прилагается давление на задний участок 438 распорки, что, в свою очередь, прилагает крутящий момент к поворотному челноку 440 через посредство винтовых поверхностей 444 заднего участка 438 распорки. Но деформация пробки под действием лекарственного препарата обеспечивает действие обратного или проксимально направленного усилия на внутренний плунжер 436, что предотвращает поворот поворотного челнока 440.
[00202] В соответствии с одним аспектом, аксиальную силу реакции, действующую на внутренний плунжер 436, можно увеличить посредством увеличения длины внутреннего плунжера 436.
[00203] После того, как доставка лекарственного препарата закончена, как показано на фиг. 73, давление на пробку 434 снижается, позволяя дистальному концу внутреннего плунжера 436 сместиться в дистальном направлении. Данное дистальное смещение позволяет поворотному челноку 440 повернуться. Продолжающееся действие аксиальной силы, прилагаемой узлом привода, поворачивает и дистально смещает поворотный челнок 440 вследствие взаимодействия винтовых поверхностей 444 в заднем участке 438 распорки с соответствующими кулачковыми лапками 446 поворотного челнока 440. В соответствии с одним аспектом, данное окончательное перемещение поворотного челнока 440 вынуждает узел привода инициировать втягивание иглы.
[00204] Как показано на фиг. 74 и 75, с узлом привода размещается ограничивающий элемент 452 в соответствии с одним аспектом настоящего изобретения. Ограничивающий элемент 452 регулирует синхронизацию окончательного смещения блоков 96, 220 привода иглы после завершения доставки дозы лекарственного препарата. Вместо поворота вокруг фиксированной опоры, ограничивающий элемент 452 свободно качается. После того, как плунжер достаточно смещается в дистальном направлении, чтобы промежуток совмещался с ограничивающим элементом 452 (как показано на фиг. 74 и 75), ограничивающий элемент 452 смещается вбок в промежуток вследствие воздействия усилия пружины на приводной блок 96, 220 иглы и скошенную поверхность 454 с задней стороны лапки ограничивающего элемента 452, который находится в зацеплении с приводным блоком иглы (лучше всего показанном на фиг. 75). После того, как ограничивающий элемент больше не удерживает приводной блок 96, 220 иглы, приводной блок 96, 220 иглы может закончить аксиальное перемещение в положение после использования. Кроме того, как показано на фиг. 75, ограничивающий элемент 452 смещается к задней стороне участка цилиндрической гильзы контейнера 14, что минимизирует цепочку допустимых отклонений различных компонентов и повышают точность дозы.
[00205] На фиг. 76-78 показан распорный узел 460 в соответствии с дополнительным аспектом настоящего изобретения. Распорный узел 460, показанный на фиг. 76-78, предусматривает устранение влияния накопления производственных допусков посредством регулировки распорного узла, что позволяет каждой системе инъецировать одинаковое количество лекарственного препарата.
[00206] Как показано на фиг. 77, распорный узел 460 включает в себя пробку 462 и распорку 464 пробки. Распорка 464 пробки включает в себя фиксированную распорную деталь или фиксированную распорку 466, которая жестко соединена с пробкой 462, и регулируемую распорную деталь или регулируемую распорку 468, которая является вращательно смещаемой в одном направлении относительно фиксированной распорки 466.
[00207] Специалисту в данной области техники будет понятно, что для закрепления фиксированной распорки 455 к пробке 462 можно использовать много способов, например, приклеивание, механический крепеж или любую другую подходящую конструкцию. Фиксированная распорка 466 предпочтительно содержит один или более витков внешней резьбы, которые находятся в зацеплении с одним или более витками ответной резьбы в пробке 462. В соответствии с одним аспектом, регулируемая распорка 468 имеет дистальный стержень с внешней резьбой 470. Резьба 470 дистального стержня находится в зацеплении с внутренней резьбой 472 в фиксированной распорке 466 (лучше всего показанной на фиг. 78), чтобы поворотно управлять аксиальным смещением регулируемой распорки 468 относительно фиксированной распорки 466.
[00208] Как показано на фиг. 76 и 77, фиксированная распорка 466 включает в себя радиально отстоящие упоры 474, и регулируемая распорка 468 включает в себя пружинную стопорную лапку 476, свободный конец которой входит в зацепление с выбранным одним из упоров 474, чтобы препятствовать вращению и аксиальному перемещению регулируемой распорки 468 к фиксированной распорке 466. Свободный конец пружинной стопорной лапки 476 выполнен по форме для прохода над упорами 474 в одном направлении, чтобы обеспечивать возможность вращения и проксимального аксиального смещения регулируемой распорки 468 от фиксированной распорки 466.
[00209] Независимо от отклонений размеров пробок и контейнеров, регулируемую распорку 468 можно отрегулировать относительно фиксированной распорки 466, чтобы обеспечить постоянную аксиальную длину узла 460 пробки.
[00210] Как показано на фиг. 78, если контейнер заполнен, то к регулируемой распорке 468 (и, следовательно, фиксированной распорке 466 и пробке 462) может прилагаться аксиальная нагрузка, например, нагрузка, которая будет иметь место при установке в систему 10, 200. После того аксиальная нагрузка прилагается, регулируемая распорка 468 может быть отодвинута назад в проксимальном направлении, чтобы обеспечивать постоянный промежуток 478 между проксимальным концом цилиндрической гильзы 480 для лекарственного препарата и проксимальным торцом регулируемой распорки 468, с учетом, тем самым, отклонений стеклянной цилиндрической линзы для лекарственного препарата и сжимаемости любого захваченного воздуха. Другими словами, распорный узел 460 позволяет регулируемой распорке 468 иметь предварительно заданное установленное положение относительно контейнера 14, независимо от изменяемых параметров контейнера 14 и длины пробки. Соответственно, начальное положение распорного узла 460 находится на предварительно заданном расстояние от контейнера 14, и конечное положение распорного узла 460 также находится на предварительно заданном расстоянии от контейнера 14, так что ход пробки 462 задается эффективной длиной плунжеров 52, 54 узла 12 привода.
[00211] На фиг. 79 и 80 показаны опорная стойка 482 и колпачок 484 автоматически регулируемой распорки 486 в соответствии с одним аспектом настоящего изобретения. Опорная стойка 482 включает в себя опорный участок 488 и аксиально продолжающуюся стойку 490. В соответствии с одним вариантом осуществления, опорная стойка 482 включает в себя множество столбчатых выступа 491, каждый из которых имеет множество храповых зубьев 492, расположенных на их проксимальных участках. На проксимальном конце каждого из множеств храповых зубьев 492 расположен фиксирующий зубец 493. Колпачок 484 является полым, и дистальный конец колпачка 484 включает в себя одну или более аксиальных пружин 494. В соответствии с одним аспектом, аксиальные пружины 494 представляют собой изогнутые консольные лапки, сформированные в процессе формования колпачка 484. В соответствии с другим аспектом, в автоматически регулируемой распорке 486 можно использовать отдельный смещающий элемент, например, пружину сжатия. При сборке с опорной стойкой 482, пружины 494 входят в зацепление с опорным участком 488 и сохраняют первоначальный промежуток между опорной стойкой 482 и колпачком 484. В соответствии с одним аспектом, пружины 494 отсутствуют. Колпачок 484 включает в себя также множество гибких консольных лапок или пластинок 496, каждая из которых имеет свободный проксимальный участок с множеством внутренних храповых зубьев 497. Проксимальный конец каждой гибкой лапки 496 включает в себя ножку 498.
[00212] Фиг. 81B изображает колпачок автоматически регулируемой распорки, размещенной внутри проксимальной выемки пробки 494 на проксимальном участке цилиндрической гильзы для лекарственного препарата. Опорная стойка 482 устанавливается в полый колпачок 484, при этом опорный участок 482 зацепляется с пробкой 494, и ножки 498 расположены снаружи проксимального конца цилиндрической гильзы.
[00213] В процессе применения, как показано на фиг. 81A и 81B, колпачок 484 смещается в дистальном направлении относительно опорной стойки 482 (а также пробки 494 и цилиндрической гильзы), пока проксимальный конец колпачка 484 не оказывается заподлицо с концом цилиндрической гильзы для лекарственного препарата. Данное действие вынуждает ножки 498 войти в зацепление с внутренней поверхностью цилиндрической гильзы и сместиться радиально внутрь, и, тем самым, вжимает храповые зубья 492 в фиксирующее зацепление с храповыми зубьями 497. Фиксирующий зубец 493, зацепление храповых зубьев 492 и 497 и зацепление ножек 498 с внутренней поверхностью цилиндрической гильзы блокируют смещение колпачка 484 относительно опорной стойки 482. Таким образом, автоматически регулируемая распорка 486 может компенсировать различия пробок, диаметров цилиндрических гильз и объемов наполнения лекарственным препаратом, чтобы автоматически обеспечивать положение опорной поверхности заподлицо с проксимальным концом цилиндрической гильзы для лекарственного препарата.
[00214] Один аспект настоящего изобретения представляет собой распорный узел 486, который располагается вплотную к пробке в контейнере внутри системы. Конструкция распорки такова, что ее эффективную длину можно регулировать, чтобы допускать дозирование точного количества лекарственного препарата. Регулировка длины предназначена для компенсации производственных допусков внутри контейнера, объема наполнения и, особенно, длины пробки, которые могут давать в сумме до 1/3 вариабельности доставляемой дозы, при использовании нерегулируемой распорки. Длину распорки можно регулировать несколькими методами, в зависимости от конкретного аспекта. Длина распорки может быть самонастраивающейся, исходя из ее местоположения относительно задней стороны контейнера, данная длина может регулироваться сборочным оборудованием во время конечной сборки основного контейнера в подузел, и распорка может быть выполнена как неразъемная часть пробки и регулироваться в виде подузла до заполнения. Регулируемая распорка 486 позволяет инъецировать более точный объем текучей среды, чем нерегулируемая пробка.
[00215] На фиг. 82-87 показан узел 500 привода для системы доставки лекарств в соответствии с одним аспектом настоящего изобретения. Узел 500 привода включает в себя исполнительную кнопку 506, контейнер 508, приводной узел 510 иглы, спусковую или запорно-отпускающую пластину 512 срабатывания, ходовой винт 514 и плунжер 516. Ходовой винт включает в себя барабанный участок 518 с внешними радиально-выступающими пластинами 520, и, как лучше всего показано на фиг. 84 и 85 и подробно описано далее, участок 522 с винтовой резьбой. Перед приведением в действие, как лучше всего показано на фиг. 83 и 86, один конец 513 спусковой пластины 512 срабатывания находится в зацеплении с одной из пластин 520, чтобы препятствовать вращению ходового винта 514.
[00216] В соответствии с одним аспектом, как показано на фиг. 84-86, участок 522 с винтовой резьбой ходового винта 514 находится в зацеплении с внутренней резьбой гайки 524, соединенной с плунжером 516. В соответствии с другим аспектом, гайка и ее внутренняя резьба сформированы неразъемно с плунжером как единая структура. Кроме того, внутри барабанного участка 518 вмещается пружина 526 постоянной жесткости и смещает ходовой винт 514 в направлении поворота. В соответствии с одним аспектом, пружина 526 закреплена к крышке 504 основания. В соответствии с другим аспектом, как показано на фиг. 84-86, корпус 528 узла привода расположен внутри системы, и пружина 526 закреплена к корпусу 528 узла привода.
[00217] В отличие от цилиндрической пружины, например, пружины сжатия, которая имеет силовую характеристику, пропорциональную ее смещению, пружина 526 постоянной жесткости и подобный элемент сохраняют относительно постоянную или равномерную силовую характеристику по всей большой рабочей длине. Равномерная силовая характеристика успешно обеспечивает усилие инъекции, которое пропорционально пружинному усилию. Данное свойство будет обеспечивать постоянное или равномерное усилие инъекции и, следовательно, по существу, постоянную скорость инъекции лекарственного препарата. Хотя на фиг. 86 показано, что пружина 526 имеет только два витка материала, специалисту в данной области техники будет очевидно, что можно использовать большее или меньшее число витков. Сборщик закручивает пружину 526 предпочтительно, когда собирается узел 500 привода, и пружина 526 храниться в закрученном положении до момента приведения в действие.
[00218] После приведения системы в действие, приводной узел 510 иглы высвобождается для аксиального смещения (вправо на фиг. 82-85) из положения перед использованием в положение после использования под действием смещающего элемента 530 (лучше всего показанного на фиг. 83). Во время этого смещения, приводной узел 510 иглы надавливает на второй конец 532 спусковой пластины 512 срабатывания и поворачивает спусковую пластину 512 срабатывания против часовой стрелки, как показано на фиг. 87. Данный поворот против часовой стрелки спусковой пластины 512 срабатывания высвобождает ее первый конец 513 из зацепления с пластиной 520. После отцепления первого конца 513 от пластины 520, пружина 526 раскручивается и вынуждает вращаться ходовой винт 514, который, в сочетании с гайкой 524, продвигает плунжер 514, чтобы дозировать лекарственный препарат.
[00219] Когда ходовой винт 514 вращается, вращение барабанного участка 518 и пластин 520 визуально наблюдается через окно 534 в корпусе. Данное окно 534 показывает ход винта таким образом, который является более наглядным, чем визуальное наблюдение линейного перемещения пробки 536 в контейнере 508. Фактически, данное вращательное перемещение является во много раз более чувствительным, чем линейное перемещение. Специалисту в данной области техники будет очевидно, что точное значение выигрыша или усиления зависит от шага резьбы на участке 522 с винтовой резьбой ходового винта 514, диаметра барабанного участка 518 и числа пластин 520 на барабанном участке 518.
[00220] На фиг. 88-93 показан узел 600 привода для системы доставки лекарств в соответствии с дополнительным аспектом настоящего изобретения. Узел 600 привода выполняет функцию сохранения механической энергии пружины и ее активизации при включении. Узел 600 привода включает в себя цилиндрическую гильзу 601 для лекарственного препарата, пробку 602, расположенную с возможностью сдвига в цилиндрической гильзе 601, первый плунжер 603 клапана, второй плунжер 604 клапана, первую вращающуюся гайку 605 и вторую вращающуюся гайку 606. Узел 600 привода также включает в себя поворотный индикатор 607, фиксирующий элемент 608, пружину 609 постоянной жесткости, расположенную внутри поворотного индикатора 607 и спусковую или запорно-отпускающую пластину 610 срабатывания. Узел 600 привода, по меньшей мере, частично расположен внутри корпуса 611, который может быть установлен в систему доставки лекарств.
[00221] Между корпусом 611 и поворотным индикатором 607 внутри барабанного участка 616 поворотного индикатора 607 заключена пружина 609 постоянной жесткости. Неактивное состояние узла привода является таким, что энергия обеспечивается раскручиванием пружины 609 и геометрическим связыванием данной энергии с корпусом 611, поворотным индикатором 607 и спусковой пластиной 610 срабатывания. Когда узел 600 привода переводится в нерабочее состояние, пружина раскручивается и превращает механическую энергию во вращательное движение поворотного индикатора.
[00222] Телескопический многокомпонентный плунжер ориентирован вдоль силовой оси между цилиндрической гильзой 601 для лекарственного препарата и поворотным индикатором 607. Поворотный индикатор 607 содержит резьбовой стержень 618. В соответствии с одним аспектом, резьба является двухзаходным и имеет либо квадратный, либо прямоугольный профиль. Многокомпонентный телескопический плунжер содержит двухкомпонентную резьбовую гайку (первая вращающаяся гайка 605 и вторую вращающуюся гайку 606) и двухкомпонентный плунжер (первый плунжер 603 клапана и второй плунжер 604 клапана). Вторая вращающаяся гайка 606 является резьбовым стержнем, который сопрягается с поворотным индикатором 607 и первой вращающейся гайкой 605 и содержит согласующиеся резьбы на его внутренней и внешней поверхностях (внутреннюю и внешнюю резьбы, соответственно) для стыковки с ними. Вторая вращающаяся гайка 606 содержит также кольцевой фланец 620 (лучше всего показанный на фиг. 92) на ее проксимальном конце, который касается низа второго плунжера 604 клапана. Вторая вращающаяся гайка 606 может навинчиваться вдоль силовой оси. Первая вращающаяся гайка 605 также является резьбовым стержнем, который содержит резьбу на его внутреннем диаметре, соответствующую внешней резьбе второй вращающейся гайки 606, чтобы сопрягаться со второй вращающейся гайкой 606.
[00223] В соответствии с одним аспектом, на одной конце первая вращающаяся гайка 605 содержит шестигранный выступ, который запрессован в первый плунжер 603 клапана, чтобы жестко соединять первый плунжер 603 клапана с первой вращающейся гайкой 605. В узле 600 привода, первая вращающаяся гайка не может вращаться и будет только поступательно перемещаться, когда подузел силового модуля приводят в действие.
[00224] Второй плунжер 604 клапана является полым цилиндрическим компонентом с небольшим буртиком 622 на его дистальном конце, большим буртиком 624 на его проксимальном конце и вытянутой L-образной консолью 626 (лучше всего показанной на фиг. 93), выступающей из большого проксимального буртика 624. В соответствии с одним вариантом осуществления, небольшой буртик 622 является разрезным и содержит четыре пластинчатых консольных лапки или пластинчатых пружины 623, которые позволяют буртику разгибаться и сопрягаться с первым плунжером 603 клапана. Внутренняя поверхность второго плунжера 604 клапана имеет поднутрение по всей его длине, заканчивающееся на его проксимальном конце уступом 628, выступающим радиально внутрь от большого буртика 624. Уступ 628 входит в зацепление со второй вращающейся гайкой 606 внутри телескопического подузла.
[00225] Первый плунжер 603 клапана закрепляется к пробке 602 и также является полым цилиндрическим компонентом, который сопрягается со вторым плунжером 604 клапана. В частности, первый плунжер 603 клапана содержит цилиндрический выступ 630 на его дистальном конце для сопряжения с пробкой 602. В соответствии с одним аспектом, как лучше всего показано на фиг. 89, на проксимальных квадрантах первого плунжера 603 клапана расположены четыре сквозных паза 632 для сопряжения с пластинчатыми пружинами или лапками 623 и участком 622 небольшого буртика второго плунжера 604 клапана. Как первый, так и второй плунжеры 603 и 604 клапана могут свободно сдвигаться.
[00226] Телескопирование достигается, когда пружина постоянной жесткости 609 раскручивается, и поворотный индикатор 607 начинает вращаться. Резьбовое соединение между поворотным индикатором 607 и второй вращающейся гайкой 606 вынуждает вторую вращающуюся гайку 606 вращаться. Но, поскольку вторая вращающаяся гайка 606 содержит резьбу под первую вращающуюся гайку 605, которая не может вращаться и испытывает сопротивление поступательному перемещению в дистальном направлении из-за давления, вызываемого лекарственным препаратом в цилиндрической гильзе 601, то вторая вращающаяся гайка 606 будет смещаться проксимально и доходить до упора в выступающий радиально внутрь уступ 628 второго плунжера клапана. Второй плунжер 604 клапана блокируется от проксимального смещения корпусом 611. Затем, и с продолжением вращения поворотного индикатора 607, поскольку вторая вращающаяся гайка 606 сопряжена по резьбе с первой вращающейся гайкой 605 (которая не может вращаться), первая вращающаяся гайка 605 поступательно перемещается в дистальном направлении и нажимает на первый плунжер 603 клапана (и пробку 602), чтобы дозировать лекарственный препарат из цилиндрической гильзы 601.
[00227] Первый плунжер 603 клапана смещается дистально относительно второго плунжера 604 клапана, пока секции небольшого буртика 622 (соответственно расположенного на дистальных концах пластинчатых пружин или лапок 623 второго плунжера 604 клапана) не входят в зацепление с соответствующими проксимальными концами пазов 632 первого плунжера 603 клапана. Это фиксирует относительное положение первого и второго плунжеров 603 и 604 клапана, при продолжающемся вращении поворотного индикатора 607, оба плунжера клапана поступательно перемещаются в дистальном направлении, и в то же время толкают вторую вращающуюся гайку (вследствие ее проксимального зацепления с буртиком 624).
[00228] Управление начальным и конечным положением телескопического плунжера и, следовательно, дозой лекарственного препарата осуществляется прямоугольной формой резьбы резьбового стержня 618 поворотного индикатора 607, резьбовым стержнем на барабанном участке 616 поворотного индикатора 607 и ступенчатой шпилькой, которая действует как фиксирующий элемент 608. В соответствии с одним аспектом, резьбовой стержень на барабанном участке 616 поворотного индикатора 607 является однозаходным, и, так как остальные компоненты в телескопической цепочке имеют двухзаходные резьбы, аксиальный ход других резьбовых компонентов вдвое больше аксиального хода фиксатора 608 относительно поворотного индикатора.
[00229] В соответствии с одним вариантом осуществления, фиксатор 608 является цилиндрическим и характеризуется круглым наконечником на одном конце и цилиндрическим буртиком на другом конце. Резьба на наружной поверхности барабанного участка 616 поворотного индикатора вместе с пазом и поднутрением 636 у основания корпуса 611 захватывает фиксатор 608 на месте, допуская его сдвиг параллельно силовой оси. Таким образом, когда пружина 609 высвобождается, и поворотный индикатор 607 поворачивается, фиксатор 608 поступательно перемещается, а также образует неподвижный упор, когда достигается дистальный конец резьбы на наружной поверхности барабанного участка 616 поворотного индикатора.
[00230] Одно преимущество аспектов узла 600 привода включает в себя использование пружины 609 постоянной жесткост, механическая энергия которой преобразуется в, по существу, постоянное линейное усилие, действующее на лекарственный препарат в цилиндрической гильзе 601. В свою очередь, это порождает равномерную скорость доставки лекарственного препарата. Другое преимущество состоит в том, что, при использовании телескопического плунжера, приводимого в движение резьбой, узел привода может обеспечивать экономию места до 0,75 дюйма (29,5 мм) по прямой, по сравнению с другими конструкциями плунжеров. Кроме того, узел привода обеспечивает управление дозой лекарственного препарата посредством начального и конечного механического ограничения в одном и том же компоненте.
[00231] Как отмечалось выше, другие системы доставки лекарств используют цилиндрическую пружину сжатия, которая развивает максимальное усилие в момент приведения в действие, которое, в конечном счете, уменьшается по мере того, как пружина расширяется. Ослабление усилия на плунжере превращается в переменное время доставки лекарственного препарата и выпускное давление лекарственного препарата. Благодаря использованию пружины постоянной жесткости, усилие, прикладываемое к плунжеру, является постоянным с начала до конца дозирования. Кроме того, расстояние, которое должна пройти цилиндрическая пружина в дополнение к длине, на которую должен переместиться статический плунжер внутри контейнера с лекарством, может привести к удлинению узла. Напротив, в вариантах осуществления настоящего изобретения, пружина постоянной жесткости радиально ограничена и не требует никакого дополнительного пространства до или после приведения в действие. Кроме того, аспекты телескопического плунжера предусматривают, что длину плунжера можно значительно уменьшить по сравнению с длиной статического плунжера.
[00232] Предшествующие системы доставки лекарств имеют изменяющуюся характеристику точности дозирования, поскольку механические компоненты, позволяющие доставлять лекарство, создают геометрическую зависимость за счет упора в контейнер, который невозможно изготавливать с жесткими допусками. Некоторые варианты осуществления настоящего изобретения создают управление моментами времени начала и окончания поступательного перемещения плунжера посредством формы резьбы в поворотном индикаторе и использования пружины постоянной жесткости.
[00233] Узел привода создает экономящую место геометрию, в дополнение к точному регулированию времени, объема и давления в устройстве доставки лекарства, что приводит к более компактному и точному устройству доставки лекарства.
[00234] Некоторые аспекты узла привода реализуют три вращающихся резьбовых стержня для получения линейной экономии места до, приблизительно, 0,75 дюйма (19,5 мм). В других аспектах такую же концепцию можно использовать с применением двух вращающихся резьбовых стержней и получить, в результате, экономию места, приблизительно, 0,5 дюйма (12,7 мм). Некоторые аспекты настоящего изобретения преобразуют энергию вращению пружины постоянной жесткости в принудительное поступательное движение плунжера.
[00235] На фиг. 94-100 показан распорный узел 660 в соответствии с дополнительным аспектом настоящего изобретения. Распорный узел 660 подобен распорному узлу 460, описанному выше и показанному на фиг. 76-78, и работает аналогичным образом, с получением сходных преимуществ. Распорный узел 660 включает в себя фиксированную распорку 666 и регулируемую распорку 668. Фиксированная распорка 666 выполнена с возможностью вмещения в пробку 462, при этом приливы 670 входят в зацепление с пробкой 462, чтобы закреплять фиксированную распорку 666 внутри пробки 462, хотя можно использовать другие подходящие конструкции закрепления, например, резьбу. Фиксированная распорка 666 содержит внутреннюю резьбу 672, которая вмещает внешнюю резьбу 678 регулируемой распорки 668. Фиксированная распорка 666 включает в себя множество упоров 674, расположенных на спиральном участке фиксированной распорки 666. Регулируемая распорка 668 включает в себя пружинную стопорную лапку 676, которая входит в зацепление с одним из выступов 674, чтобы препятствовать вращению и аксиальному перемещению регулируемой распорки 668 относительно фиксированной распорки 666. Пружинная стопорная лапка 676 выполнена по форме для прохода над упорами 674 в одном направлении, чтобы обеспечивать возможность вращения и аксиального смещения регулируемой распорки 668 от фиксированной распорки 666. Регулируемая распорка 668 может первоначально крепиться к фиксированной распорке 666 с помощью резьбы 672, 678 посредством приложения усилия к верху пружинной стопорной лапки 676, которое отжимает пружинную стопорную лапку 676 от упоров 674, чтобы допустить закрепление распорок 666, 668 друг к другу. Соответственно, подобно тому, как изложено выше в связи с распорным узлом 460, регулируемая распорка может вращаться с перемещение в одном аксиальном направлении, чтобы регулировать длину распорного узла 660.
[00236] Как также показано на фиг. 94-100, распорный узел 660 дополнительно содержит шайбу 680, выполненную с возможностью вмещения в регулируемую распорку 668 и закрепления к ней. Вместо обеспечения множества размеров регулируемых распорок 468, 668 можно обеспечивать множество размеров шайб 680, чтобы компенсировать множество разных объемов наполнения в контейнере 14. Шайбу 680 можно закреплять к регулируемой распорке 668 посредством соединителя 682, продолжающегося от шайбы 680, который вмещается в регулируемую распорку 668 посредством защелкивания, хотя можно использовать другие подходящие конструкции крепления. Центральный участок 684 фиксированной распорки 666 выполнен с возможностью его зацепления в то время, когда регулируемая распорка 668 поворачивается относительно фиксированной распорки 666, чтобы препятствовать повороту фиксированной распорки 666 вместе с регулируемой распоркой 268. Центральный участок 684 фиксированной распорки 666 доступен через отверстие в шайбе 680.
[00237] Элементы одного раскрытого аспекта можно объединять с элементами одного или более других раскрытых аспектов, чтобы формировать разные комбинации, которые считаются находящимися в пределах объема настоящего изобретения.
[00238] Хотя настоящее изобретение описано на его примерных конструкциях, настоящее изобретение можно дополнительно модифицировать в пределах существа и объема данного изобретения. Поэтому предполагается, что настоящая заявка охватывает любые изменения, применения или доработки изобретения, использующие его общие принципы. Кроме того, предполагается, что настоящая заявка охватывает такие отклонения от настоящего раскрытия, которые создаются в пределах известного или специального практического применения в данной области техники, к которой относится настоящее изобретение, и которые не выходят за пределы прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПОРНЫЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740846C2 |
| УЗЕЛ ПРИВОДА И РАСПОРКА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740732C2 |
| УЗЕЛ ПРИВОДА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740731C2 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2741461C2 |
| УЗЕЛ ПРИВОДА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2827350C2 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2822951C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ЛЕКАРСТВА, СОДЕРЖАЩЕЕ ЗАПОРНЫЙ МЕХАНИЗМ, ИМЕЮЩИЙ РЫЧАГ | 2012 |
|
RU2560904C2 |
| АВТОИНЪЕКТОР С КОЛПАЧКОМ | 2020 |
|
RU2780524C1 |
| АВТОИНЪЕКТОР С КОЖУХОМ ИГЛЫ | 2020 |
|
RU2781570C1 |
| АВТОИНЪЕКТОР СО ЗВУКОВЫМ ИНДИКАТОРОМ | 2020 |
|
RU2780523C1 |
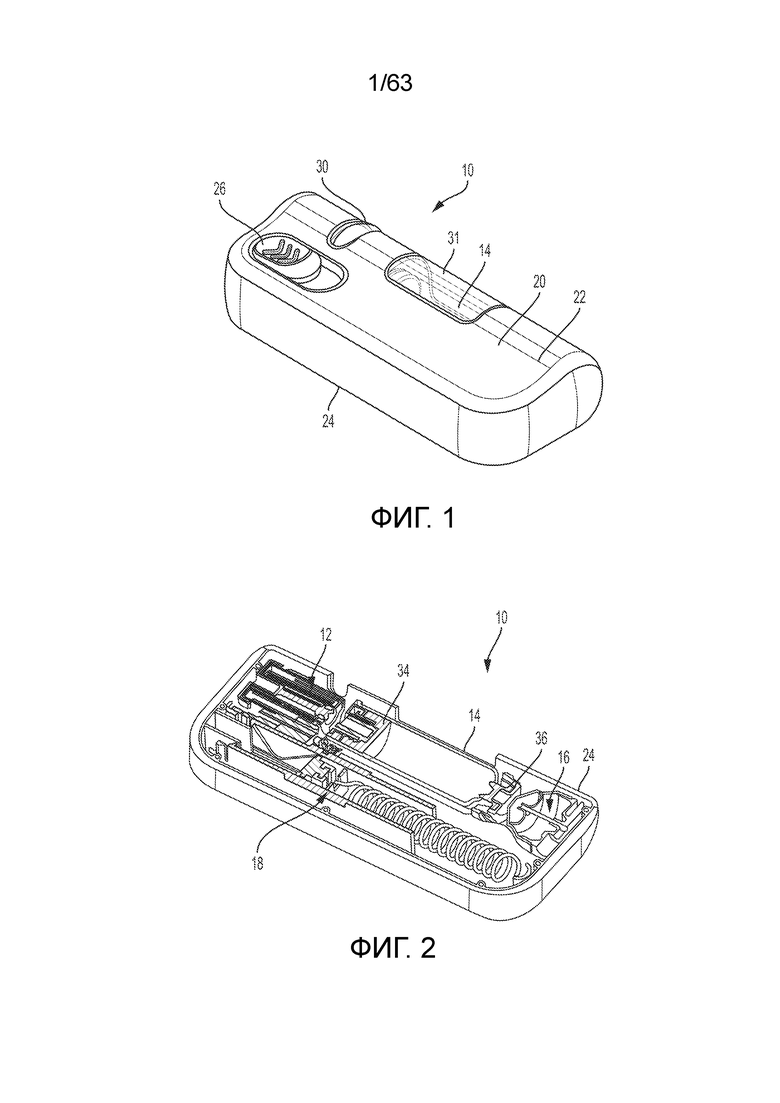
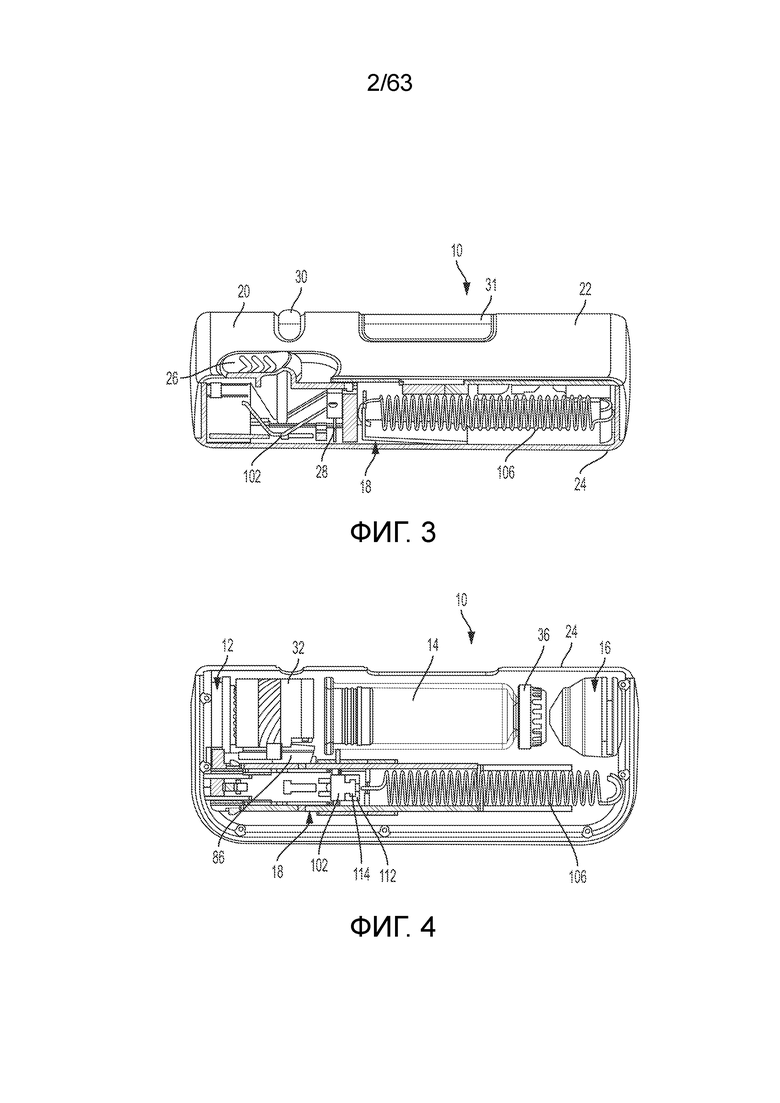
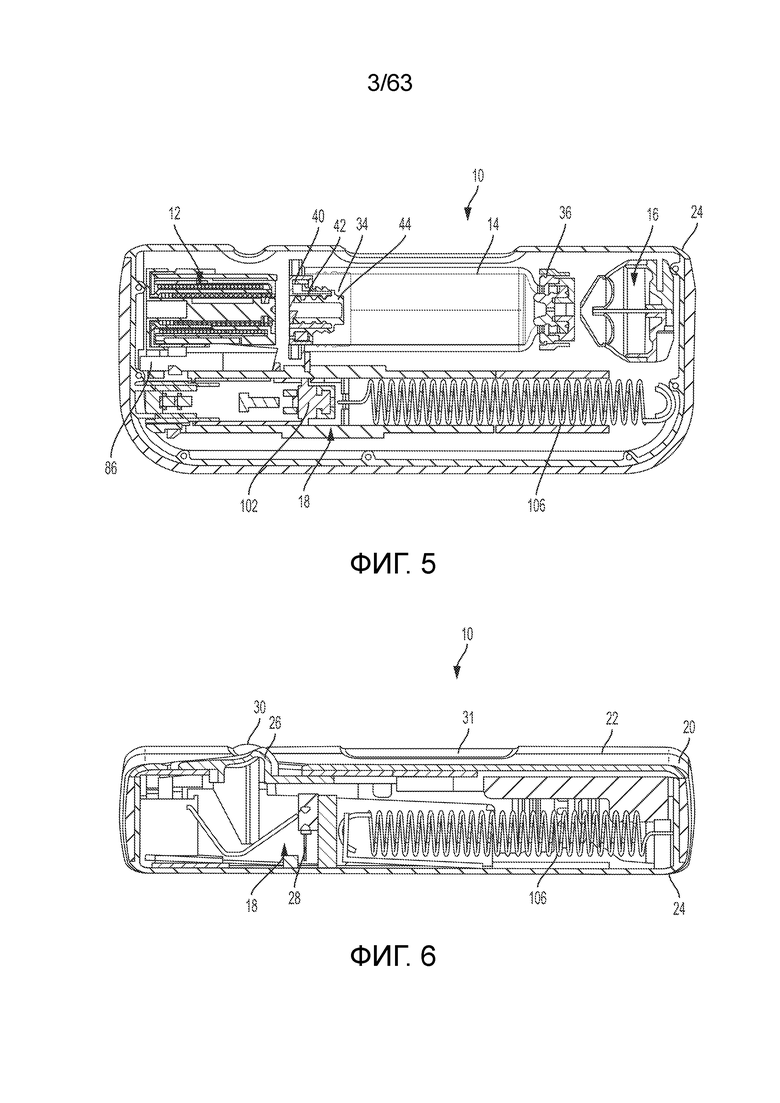
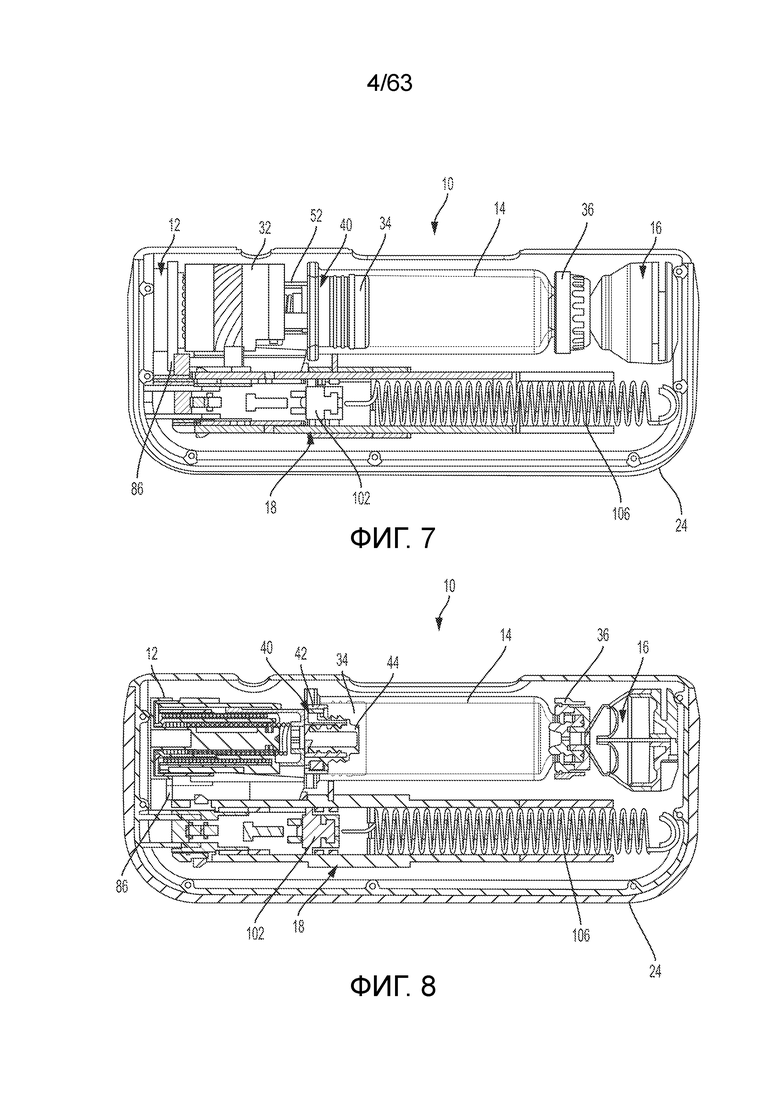
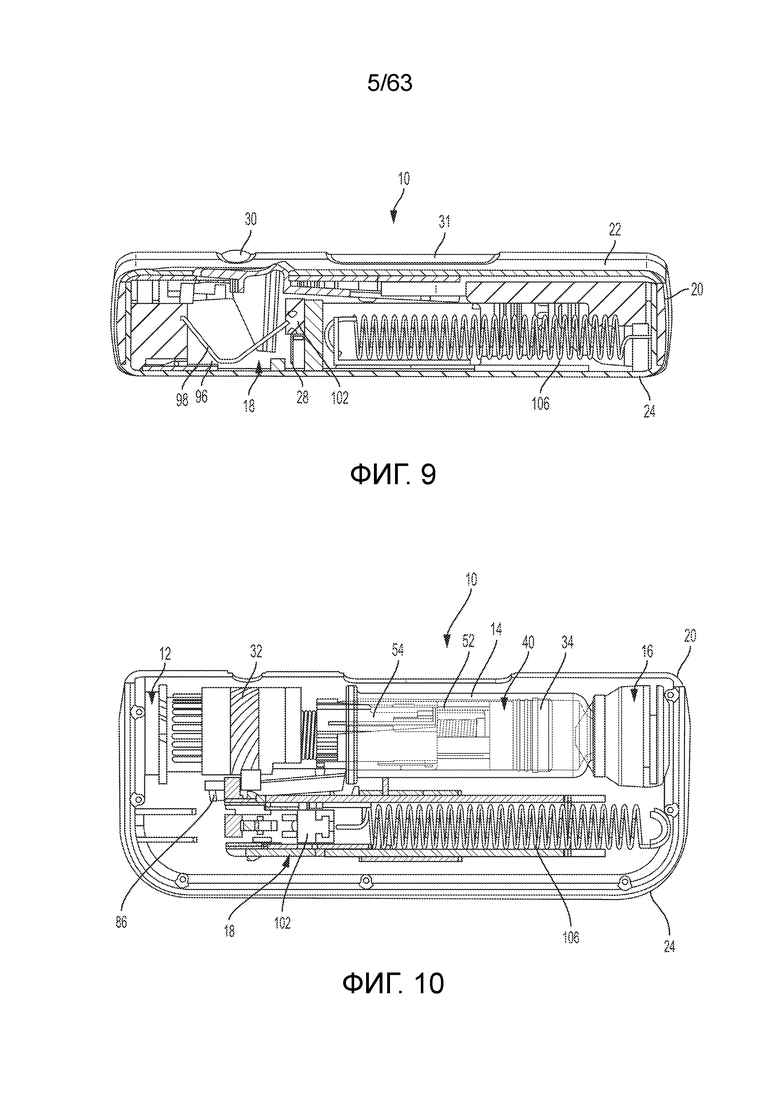
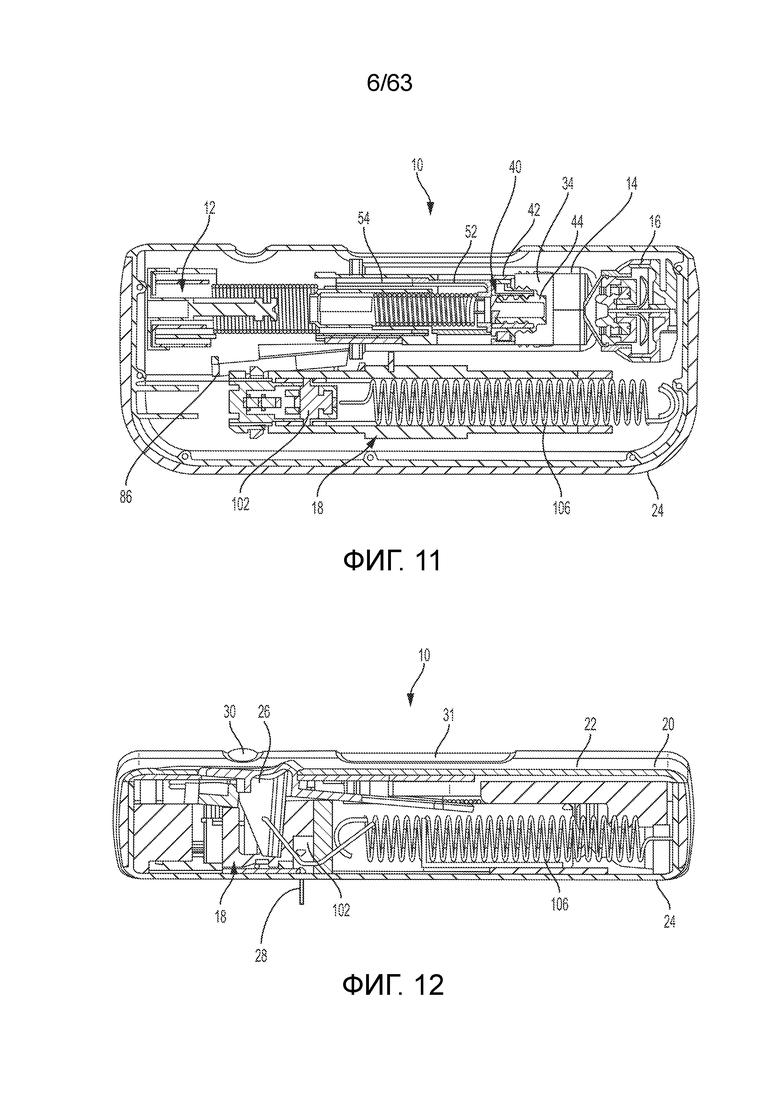
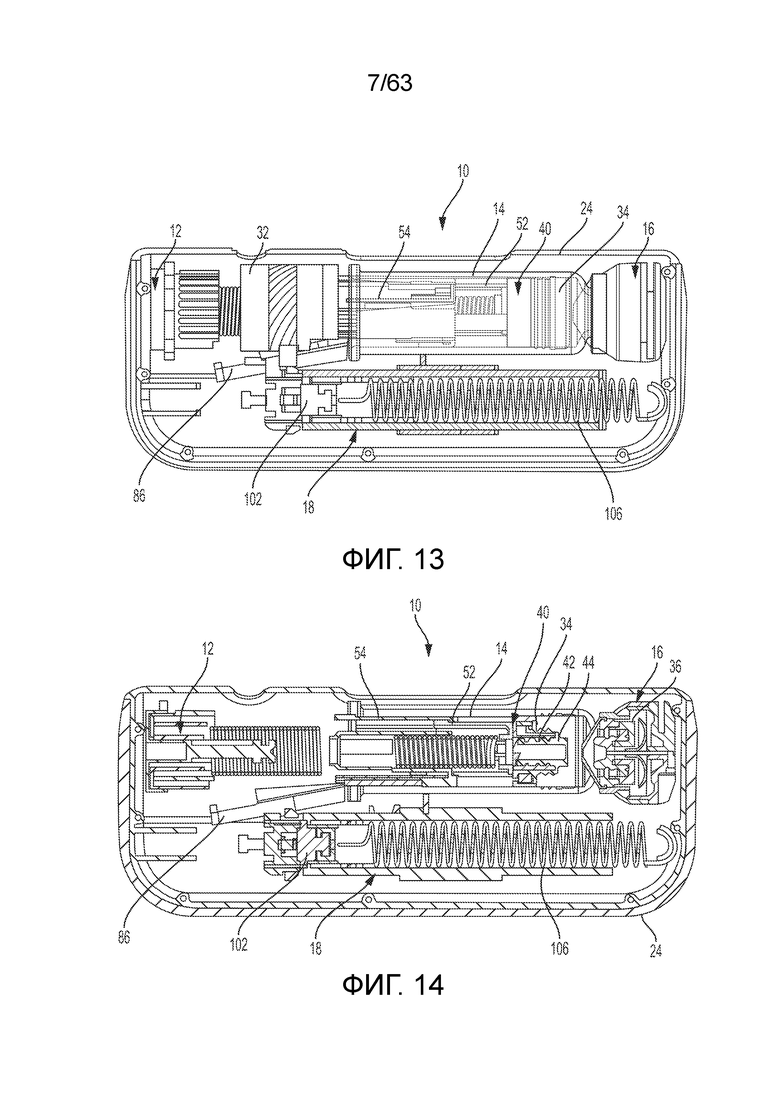
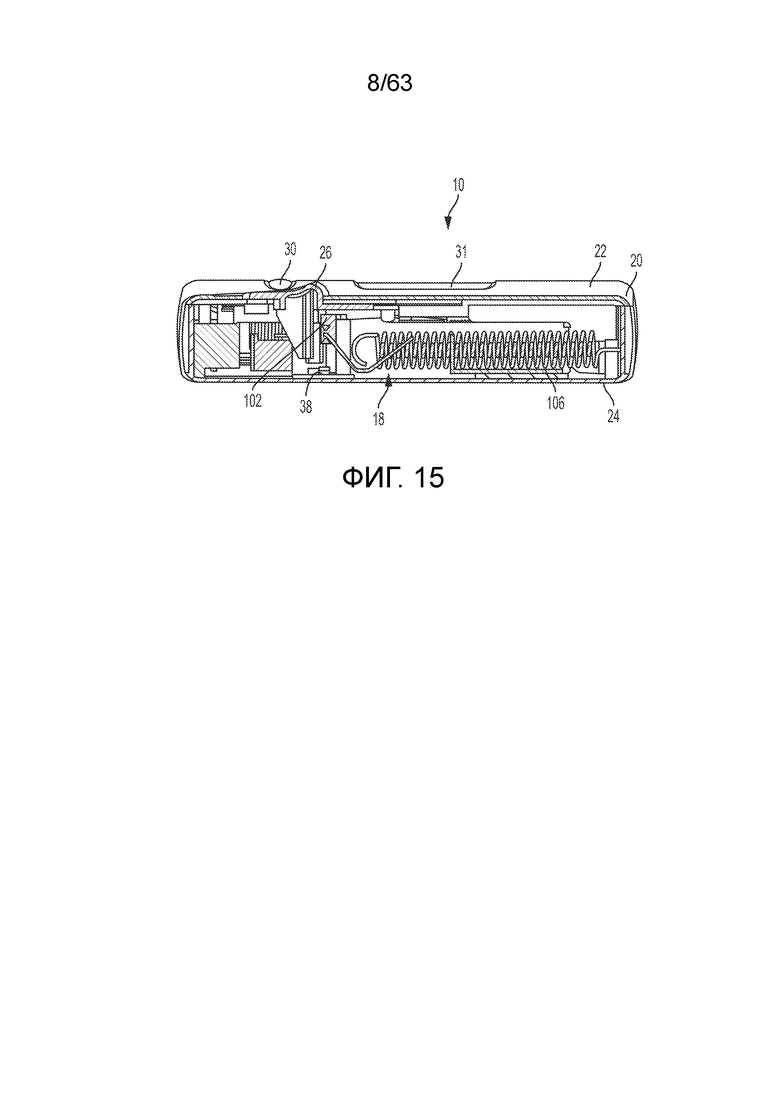
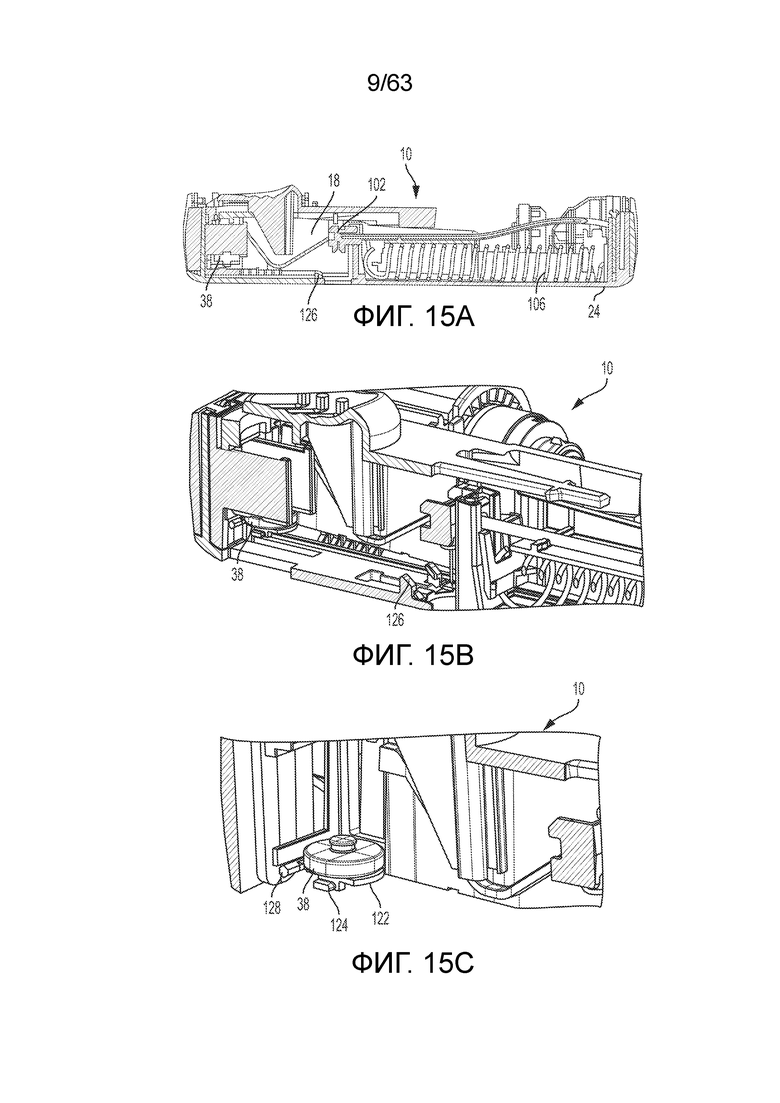
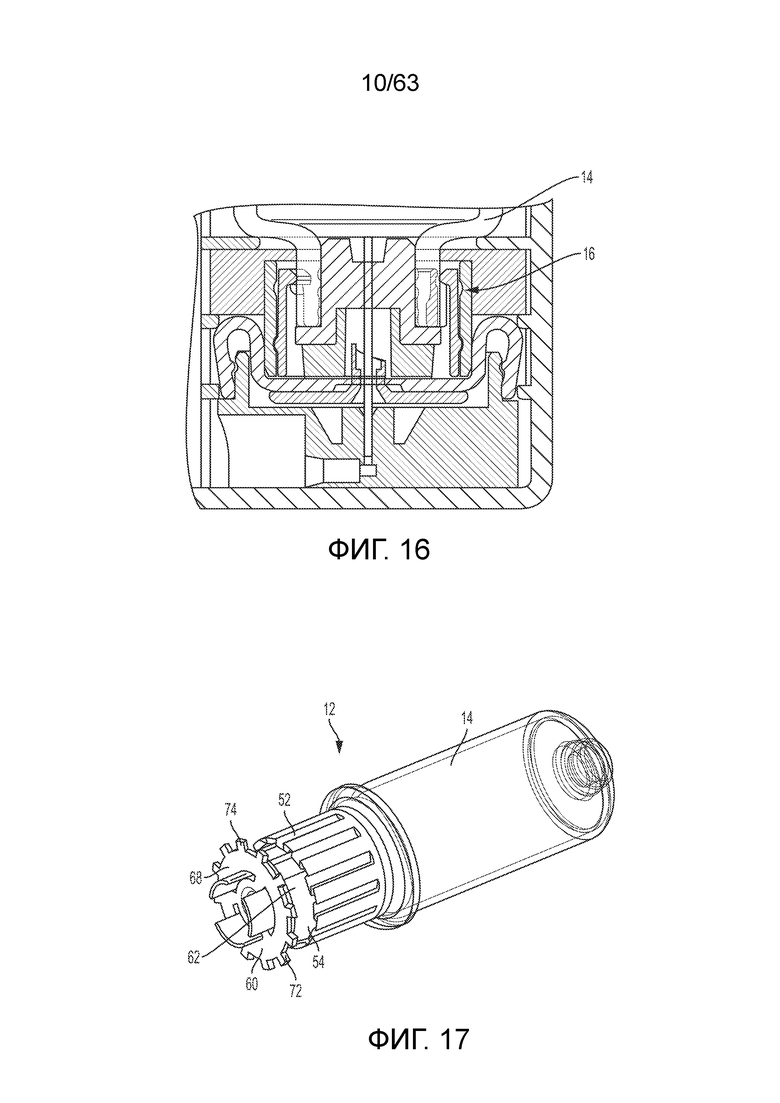
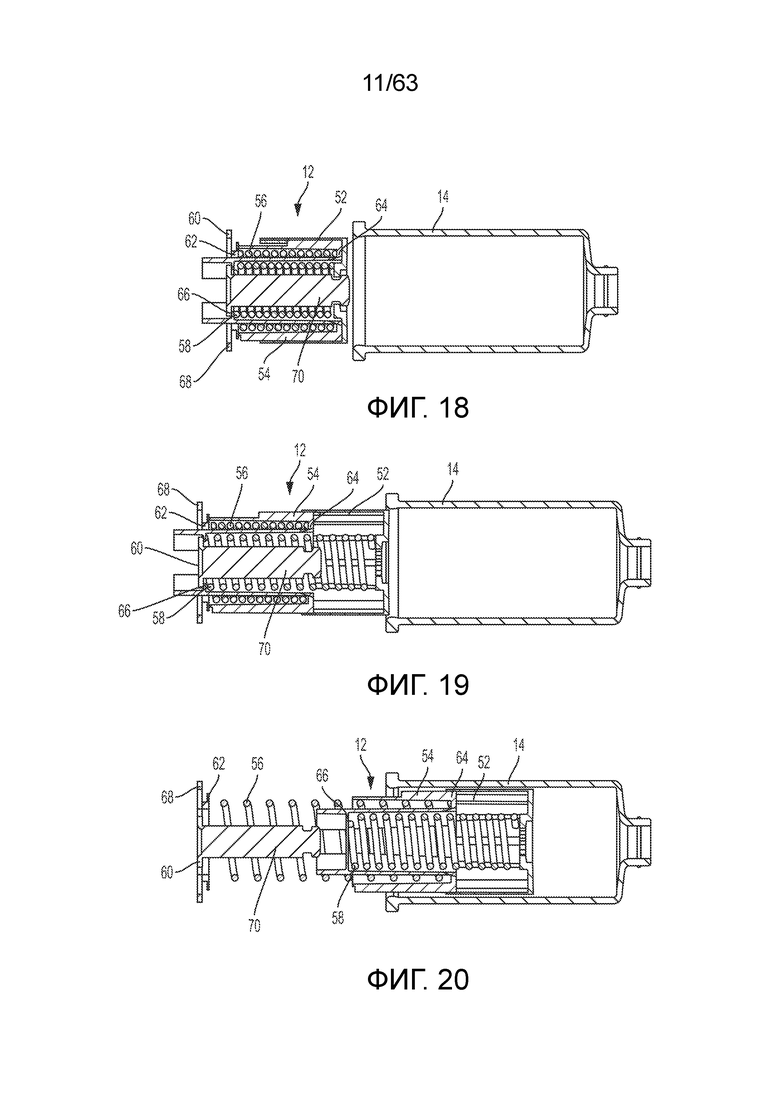
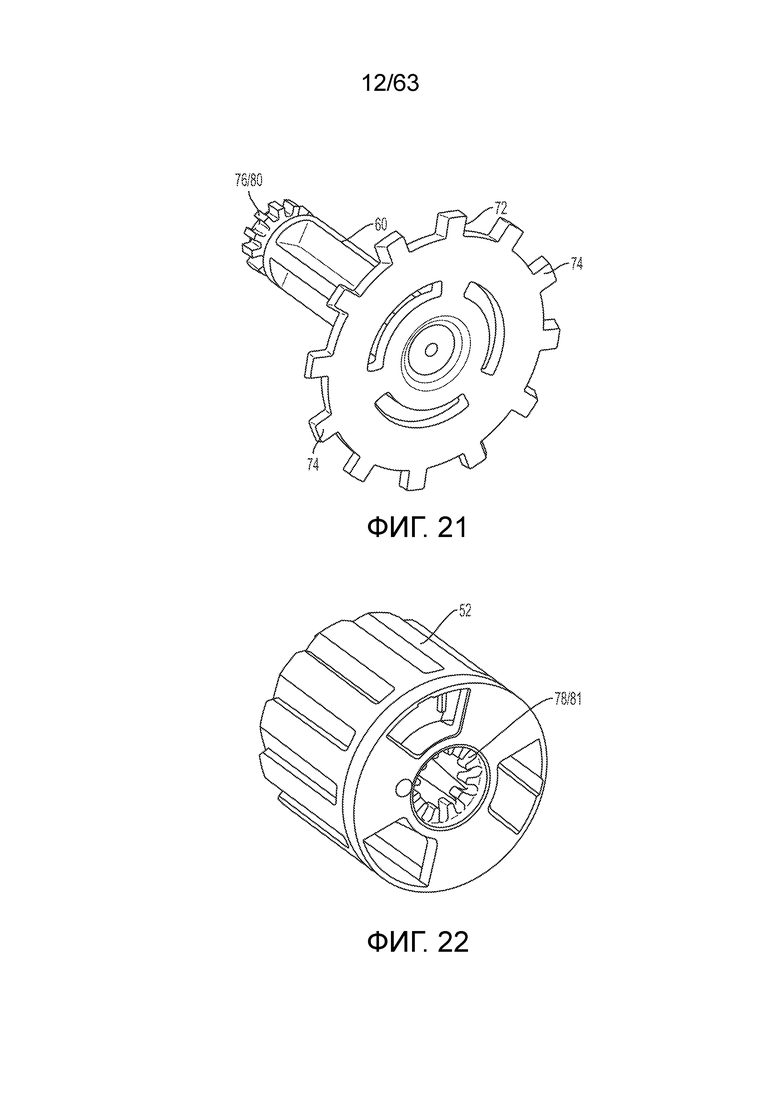
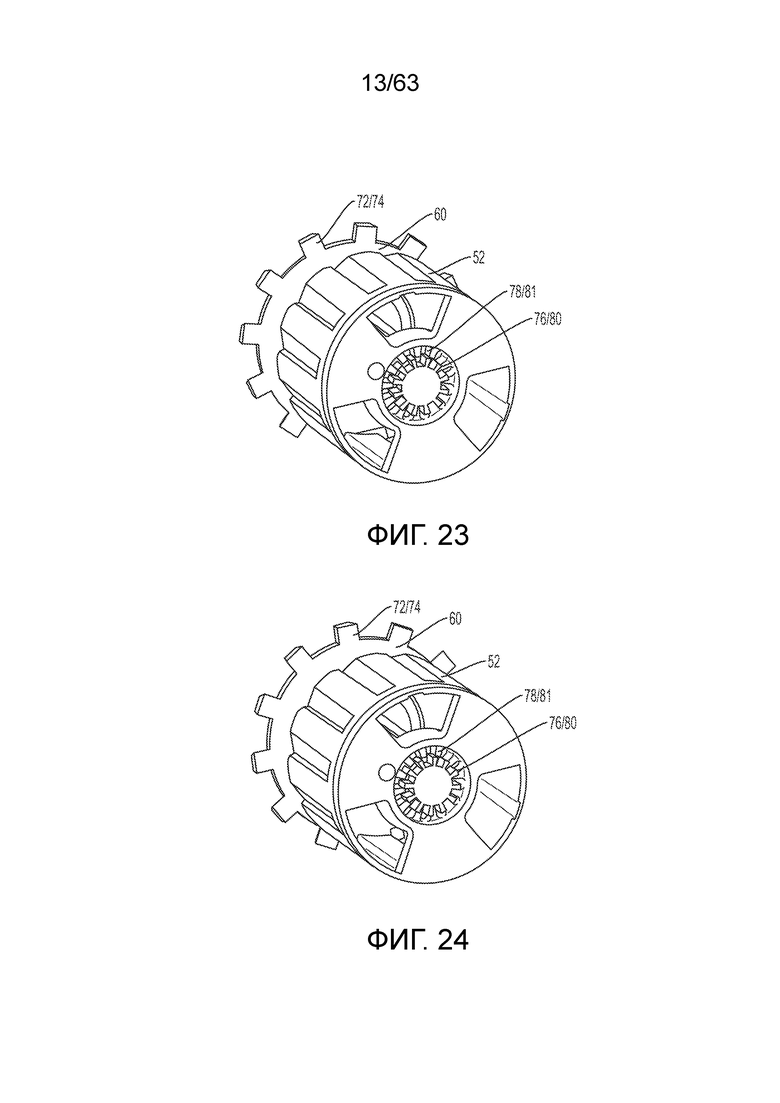
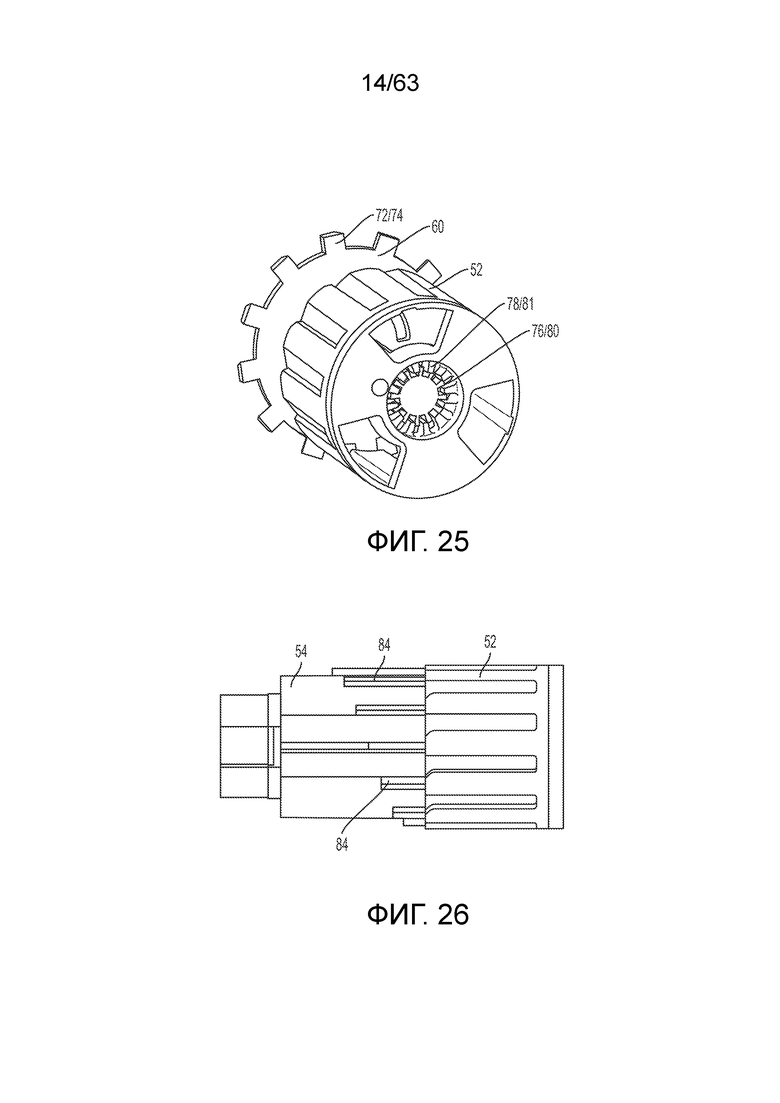
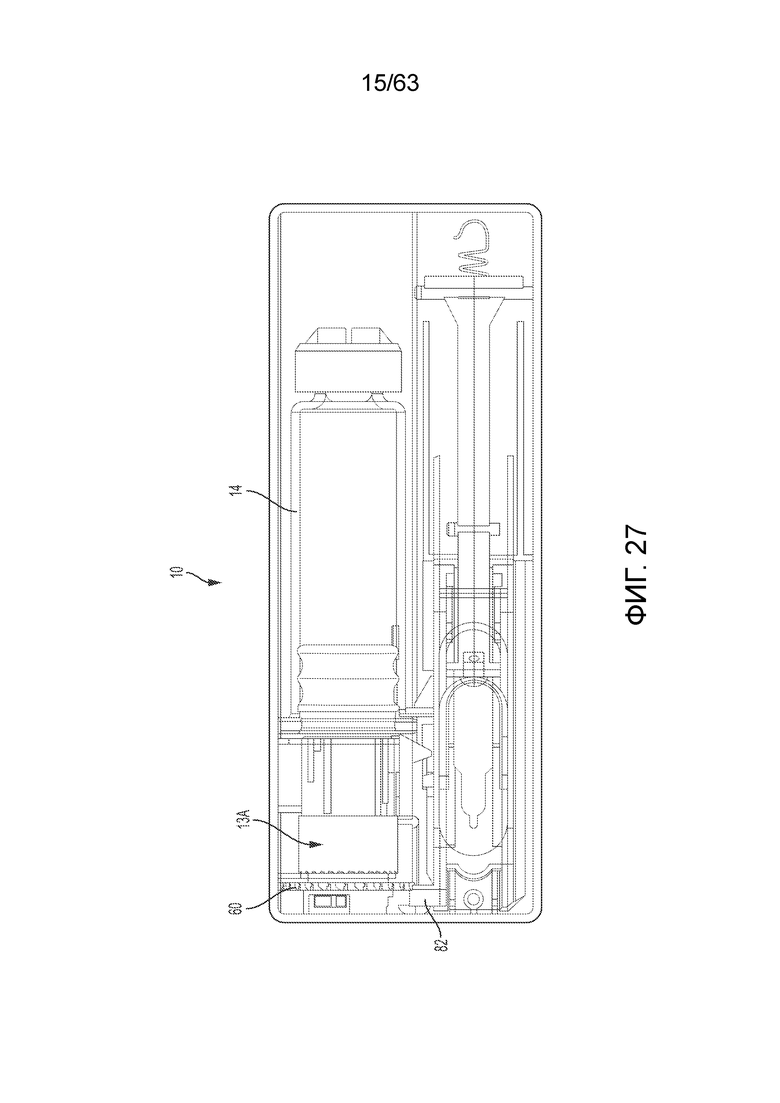
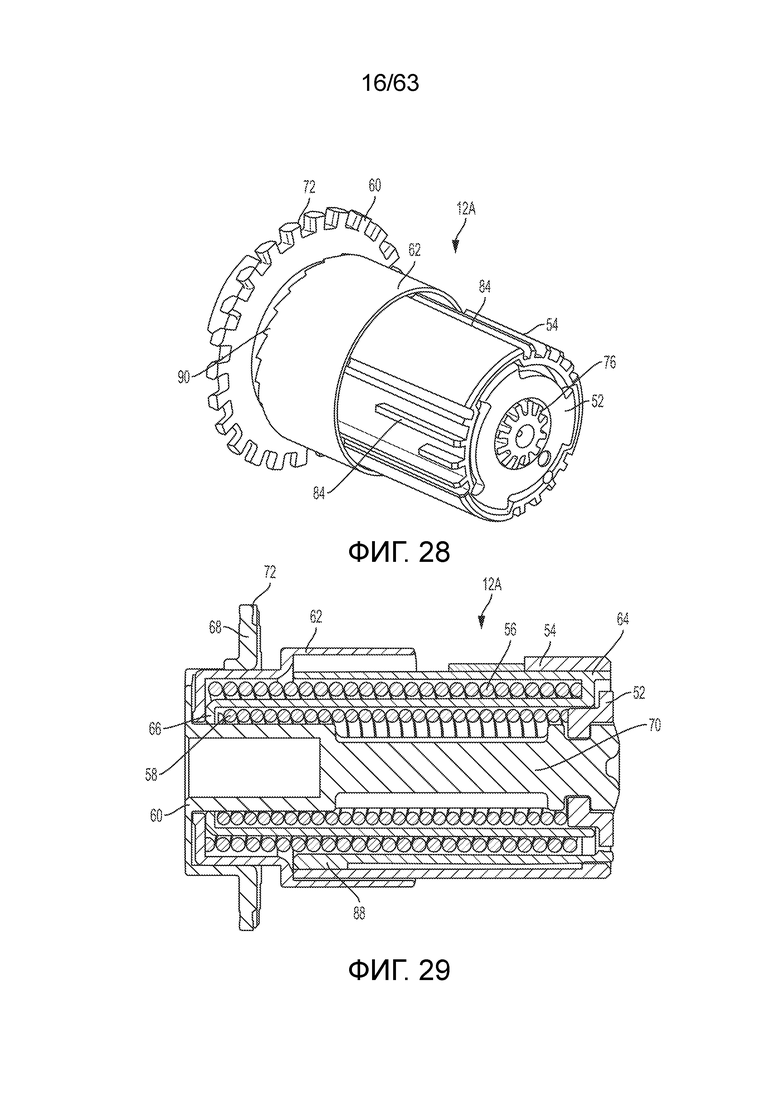
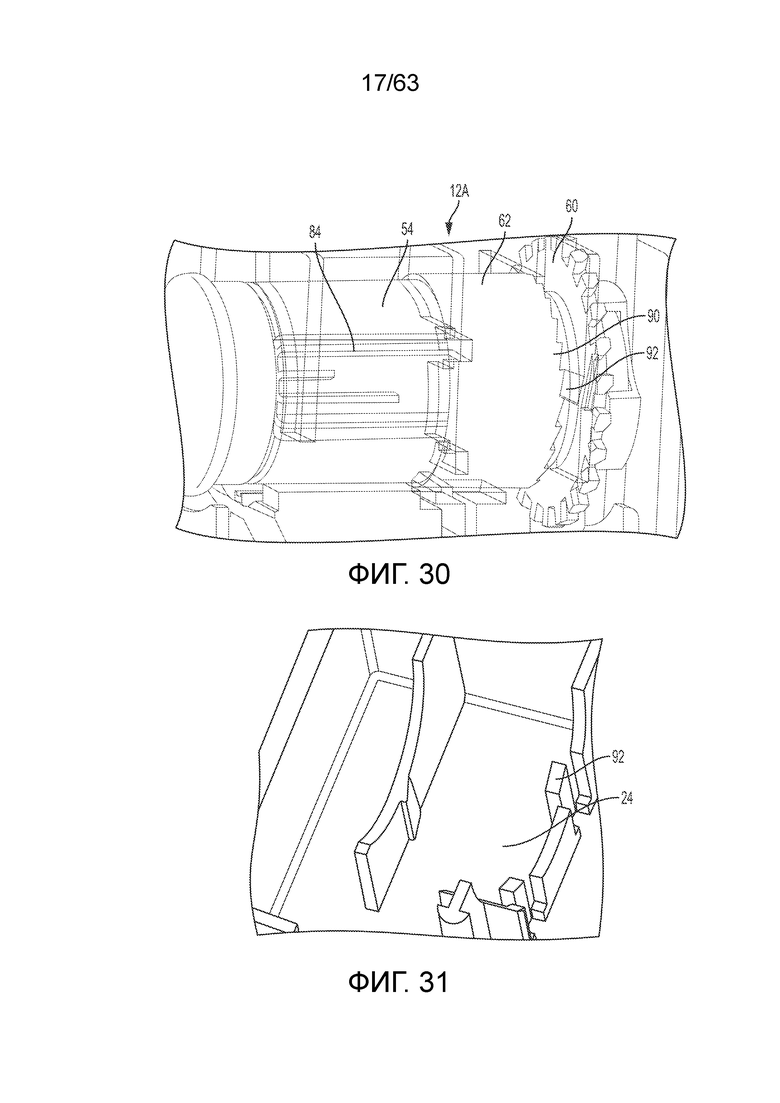
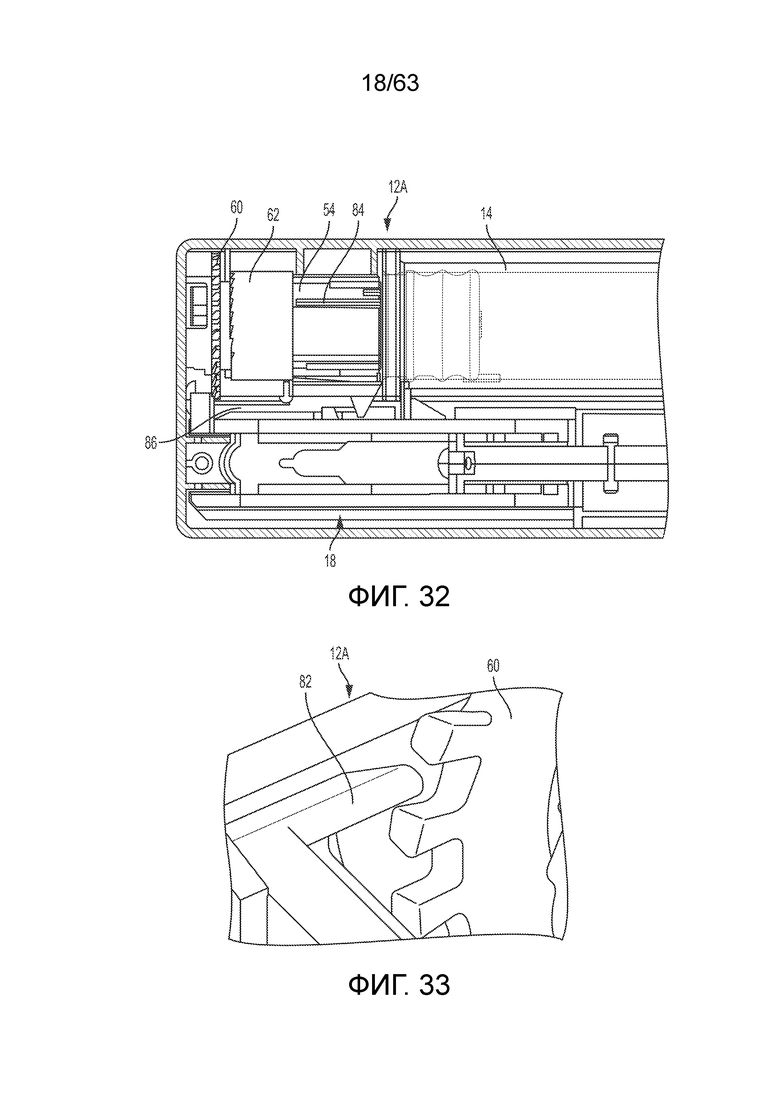
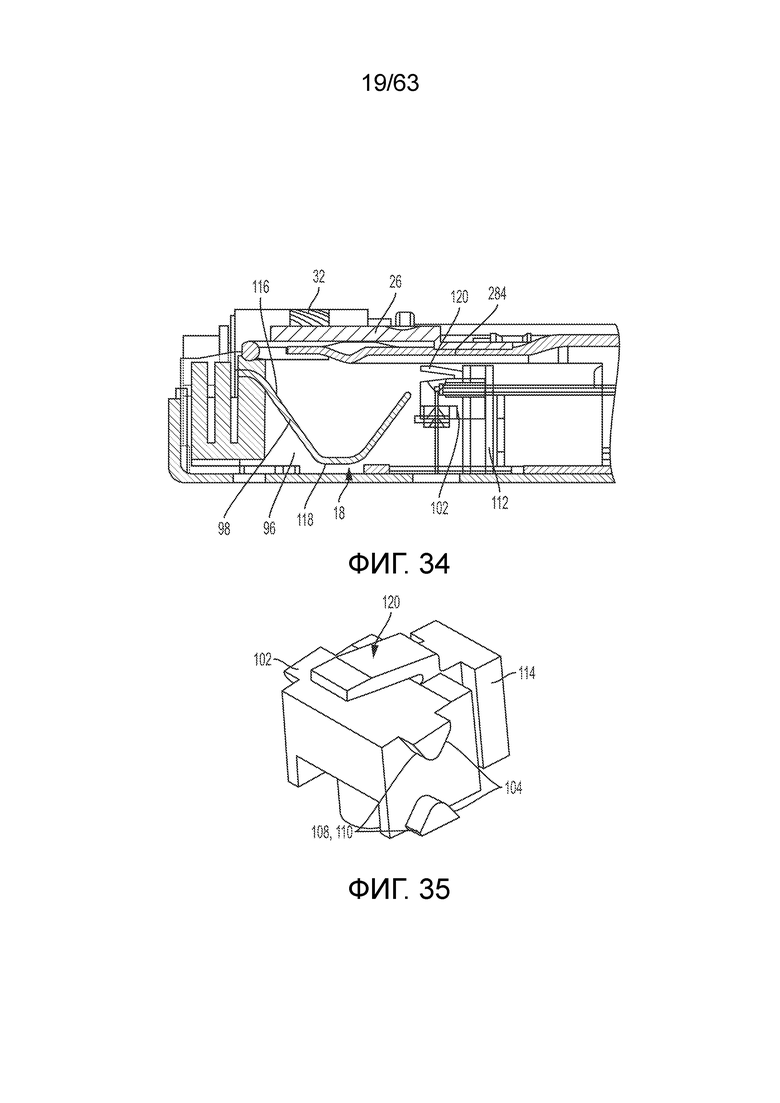
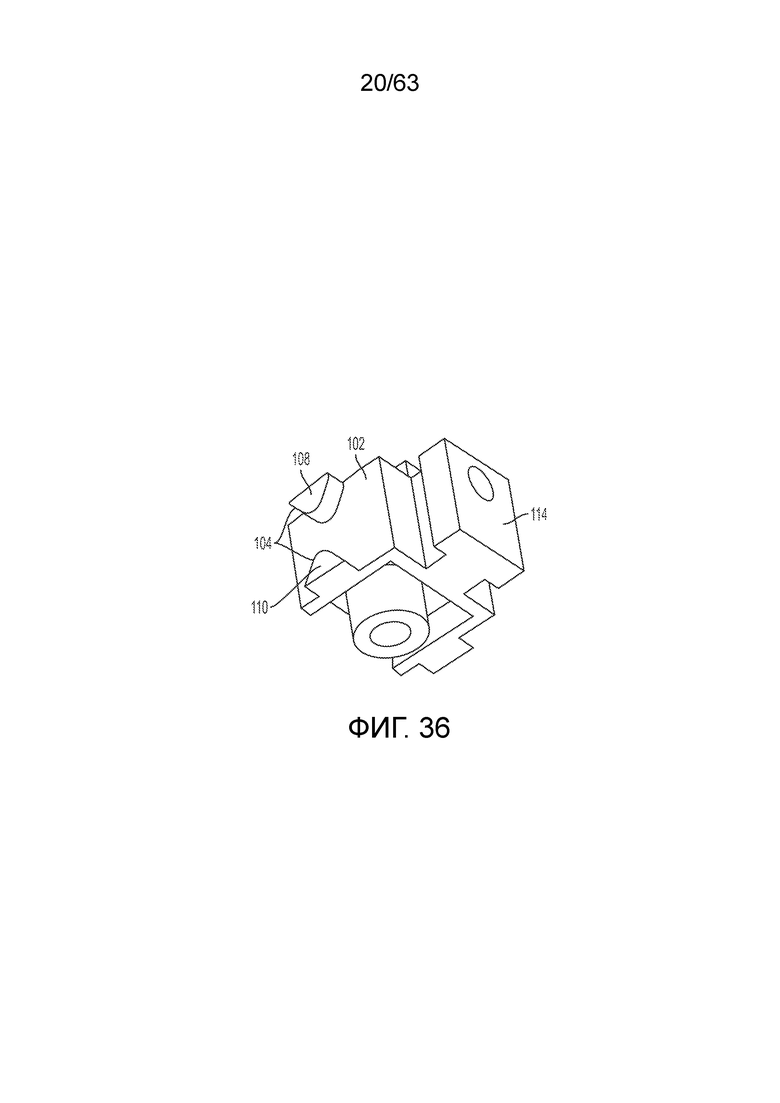
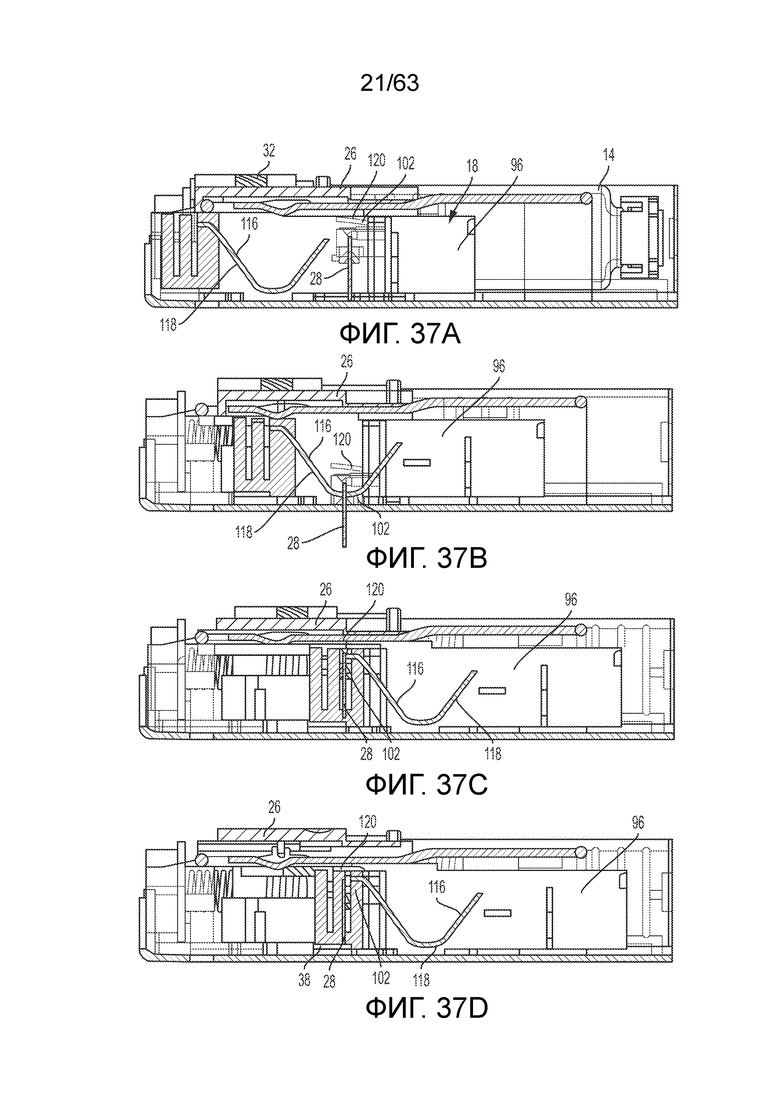
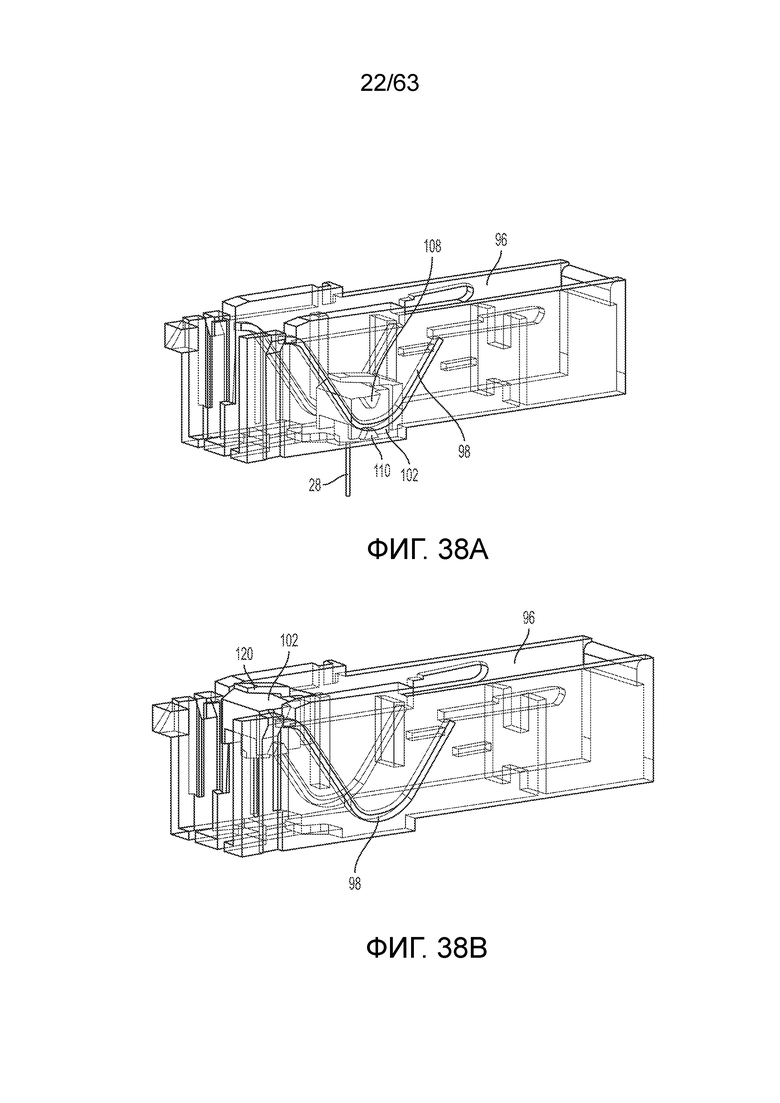
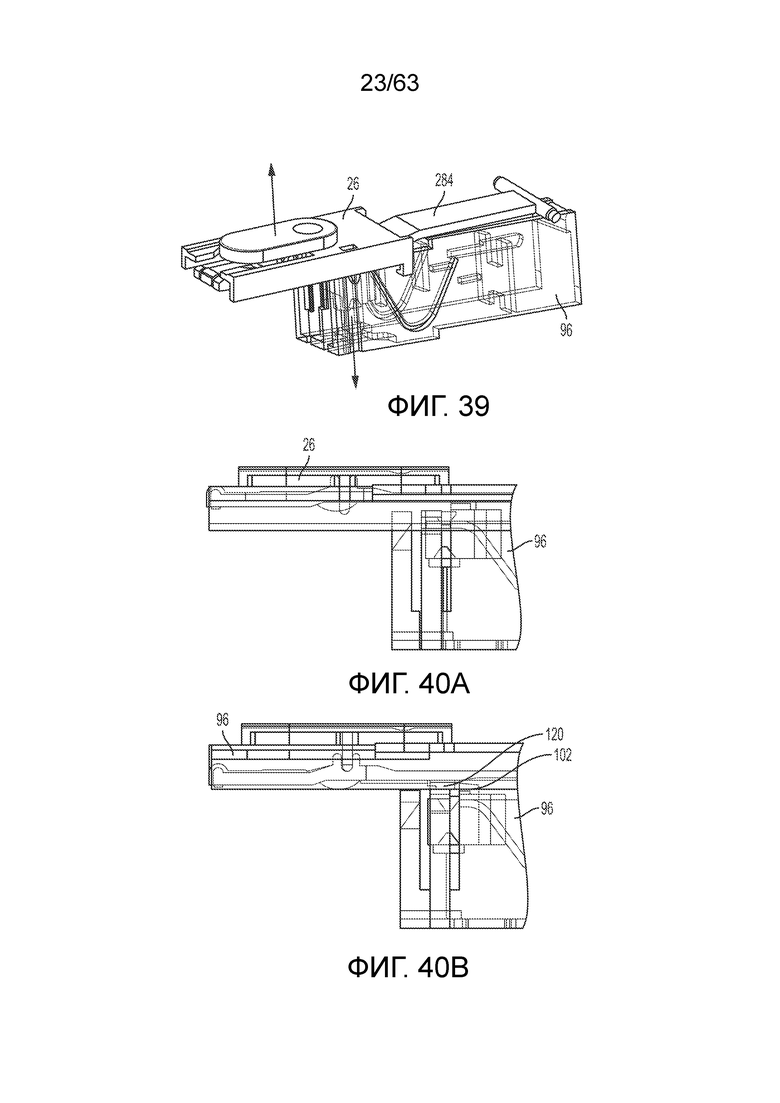
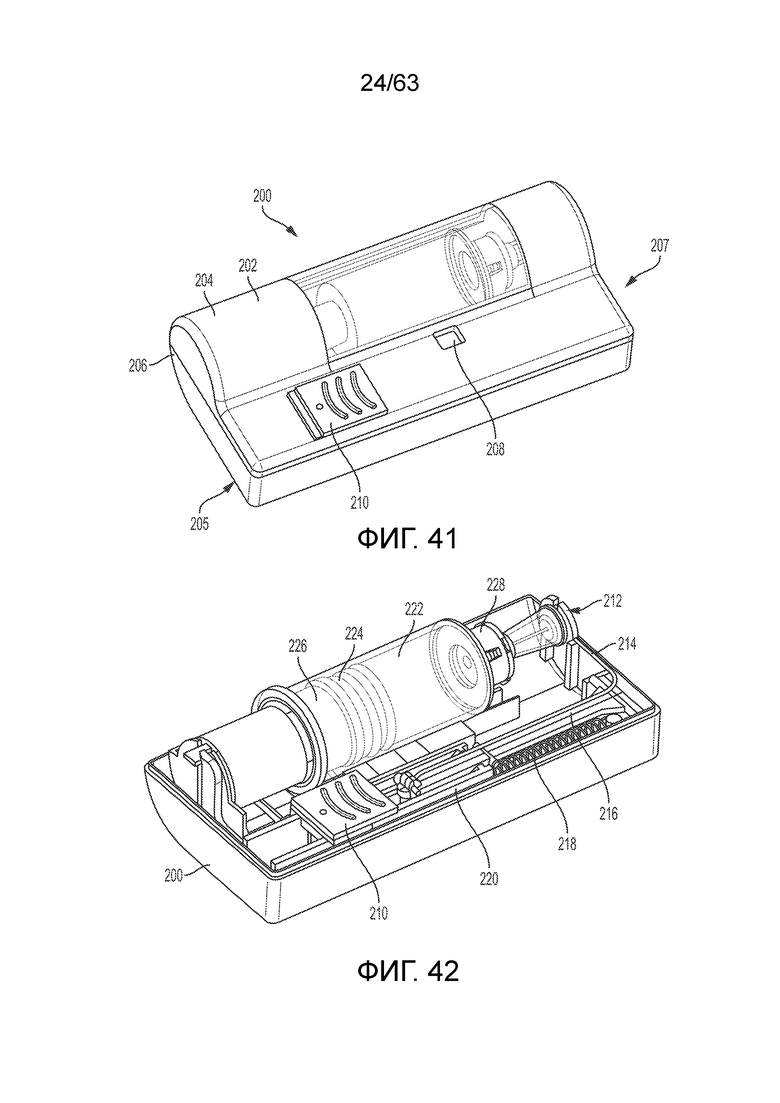
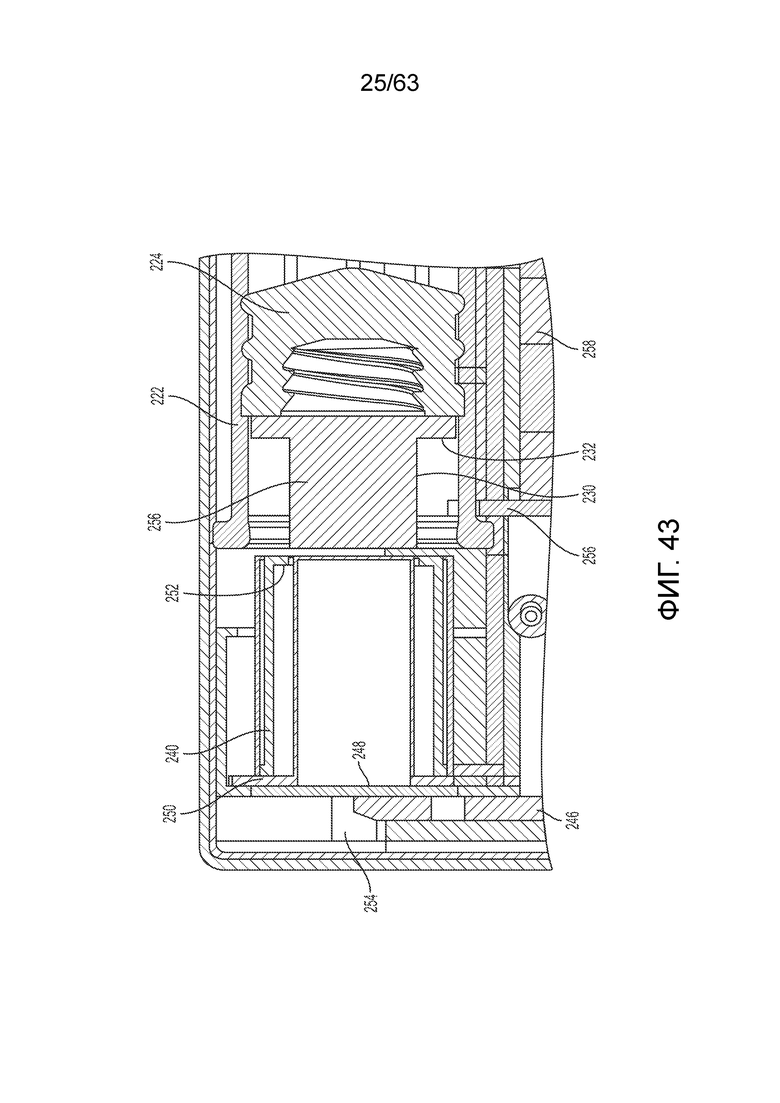

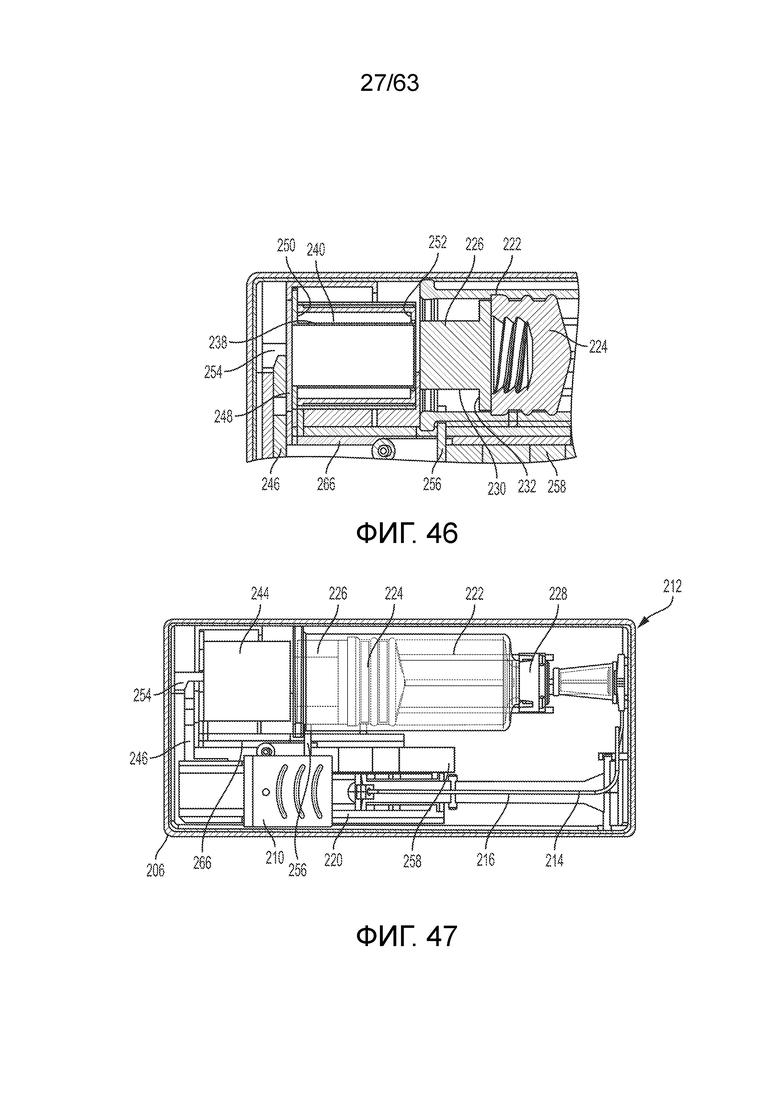
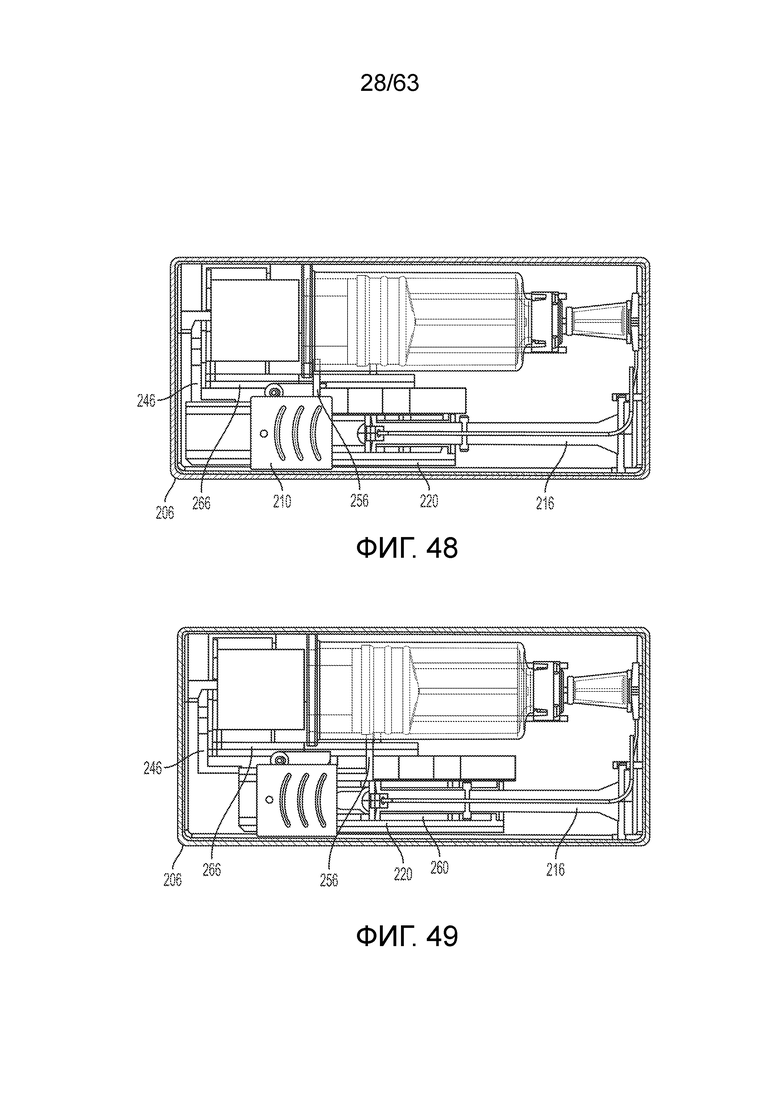
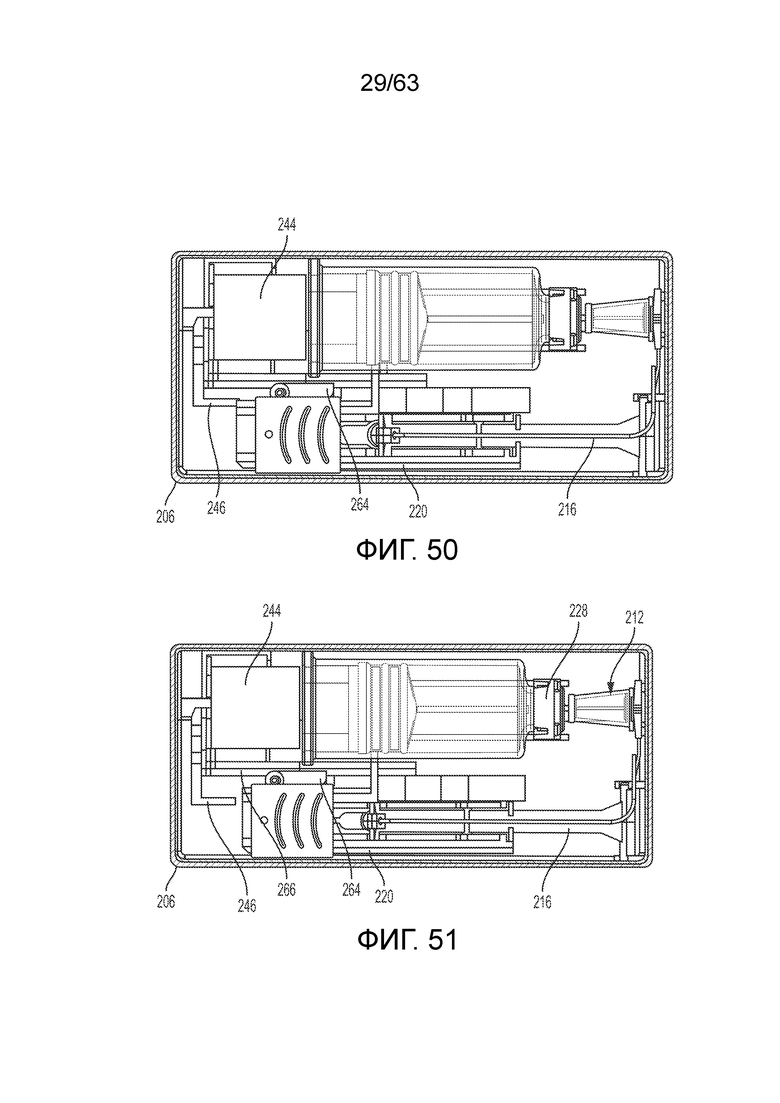
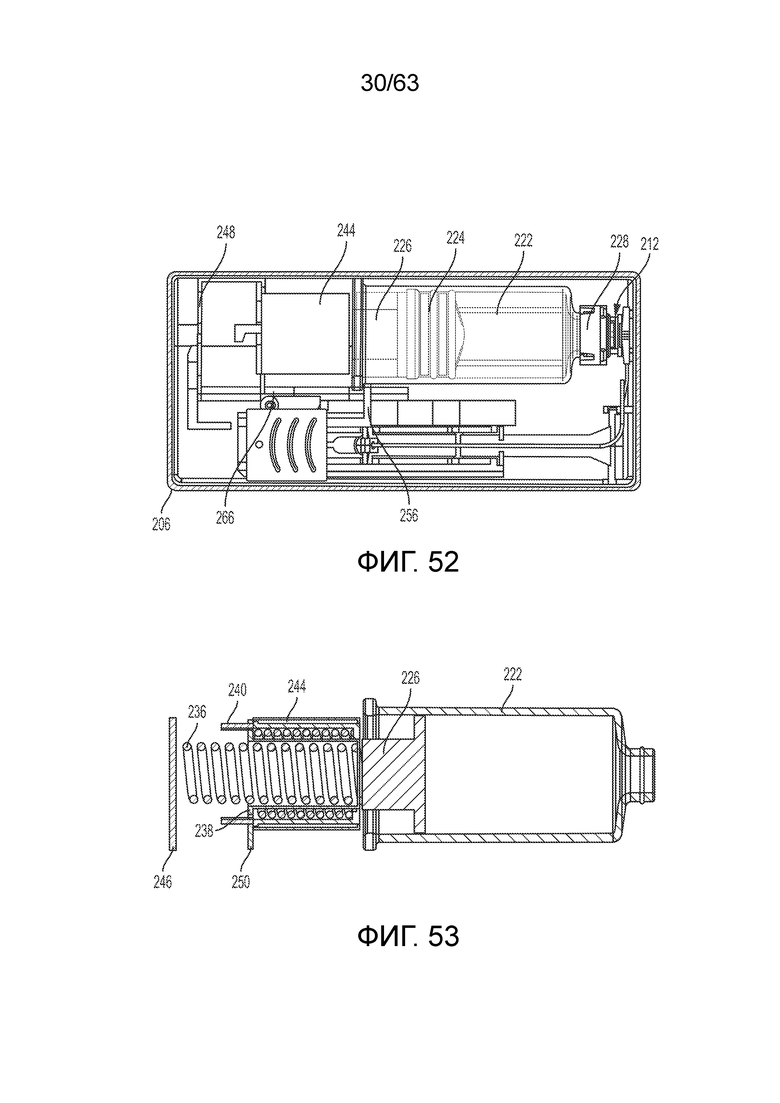
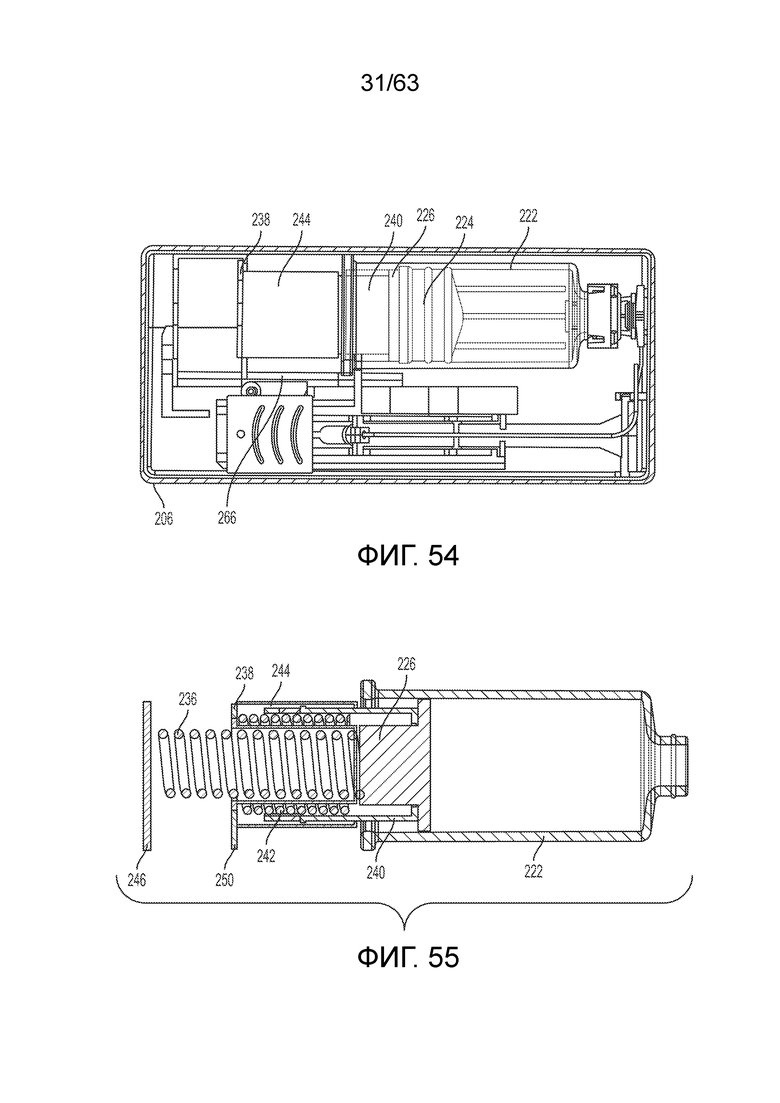
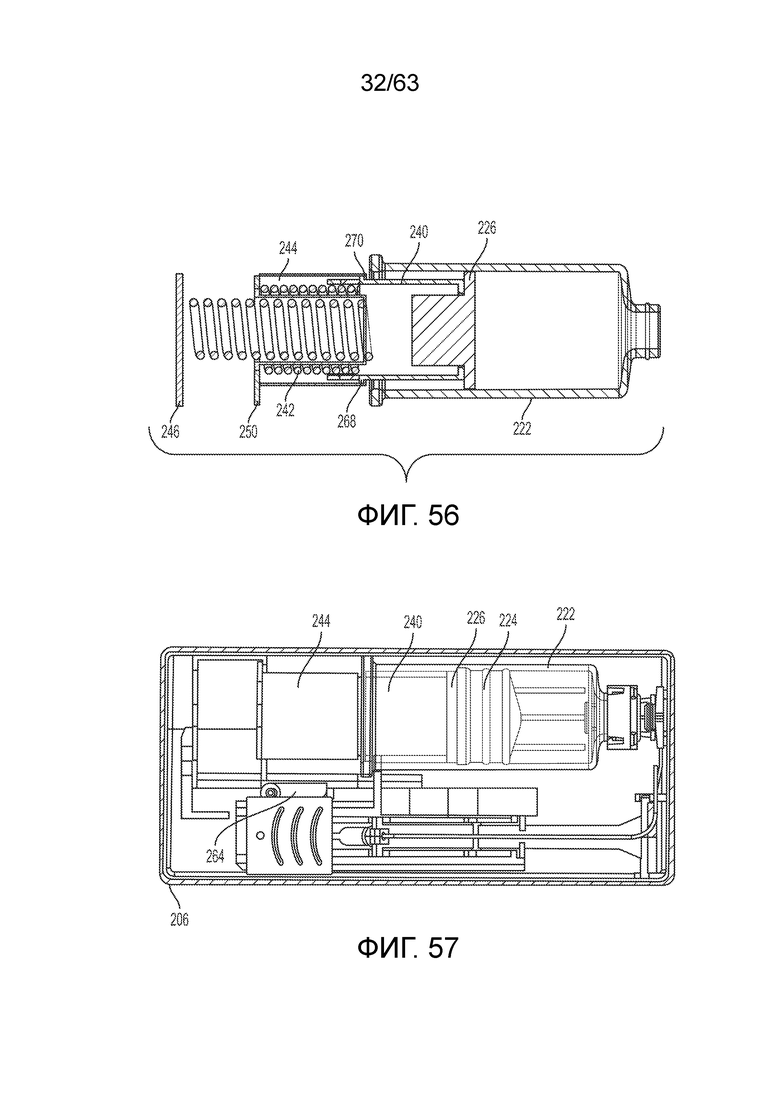
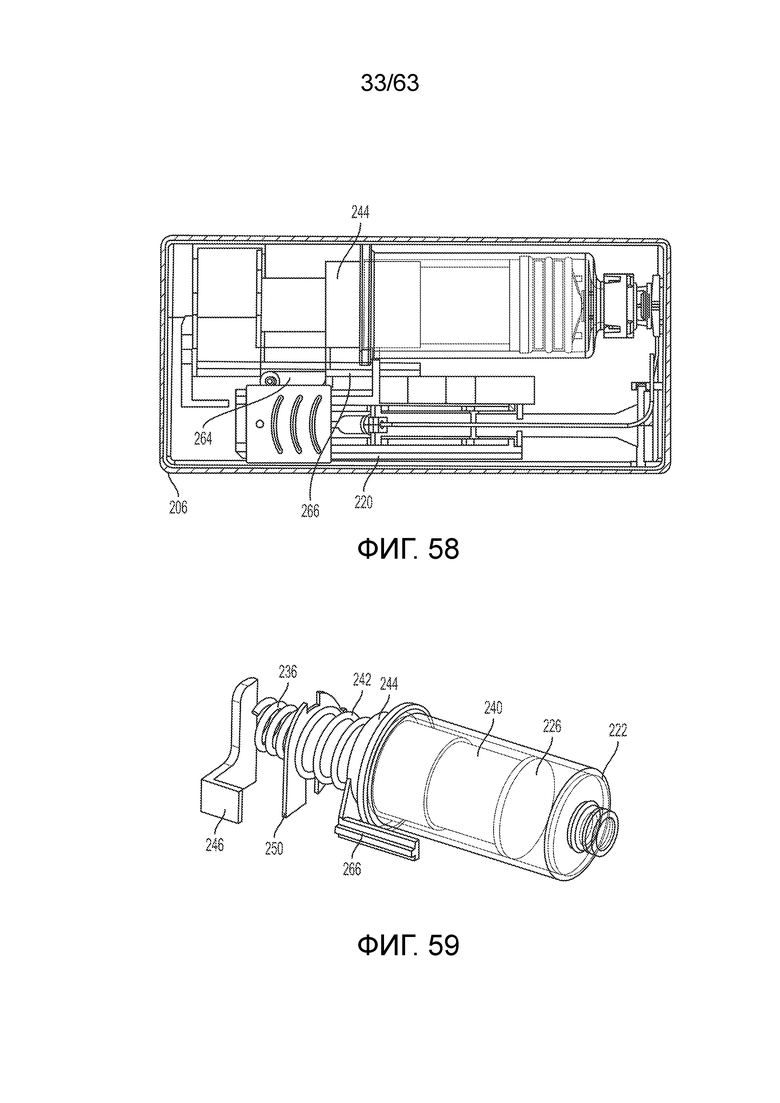
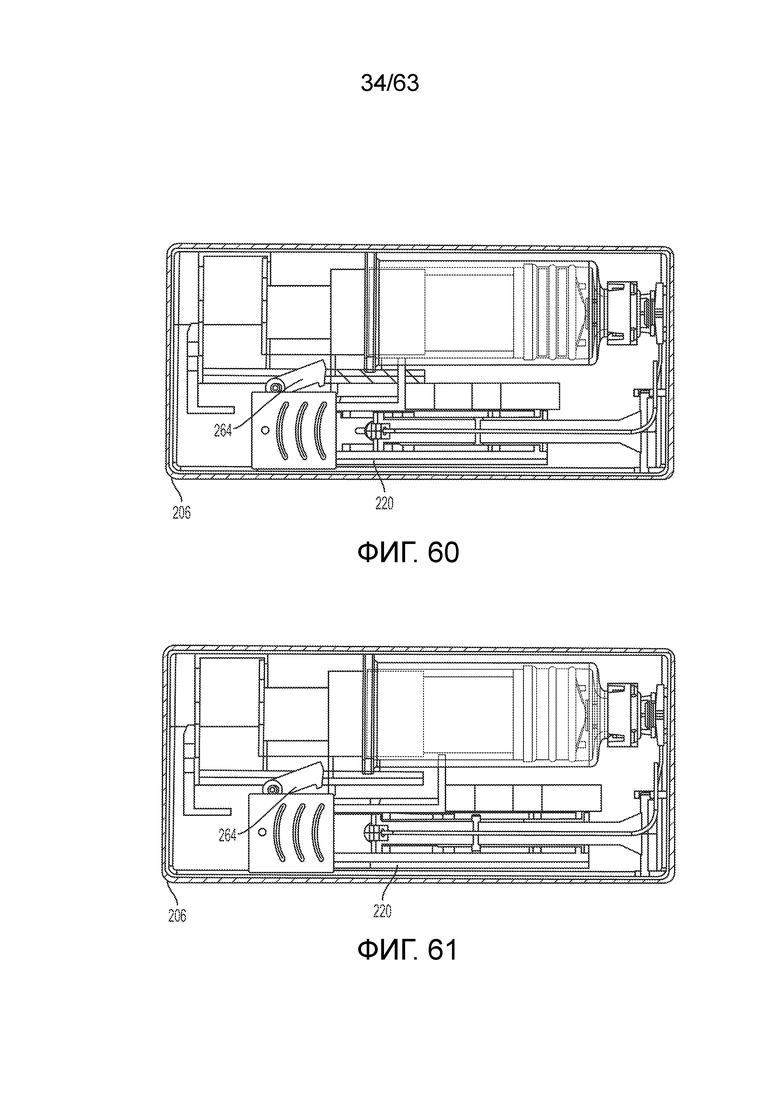
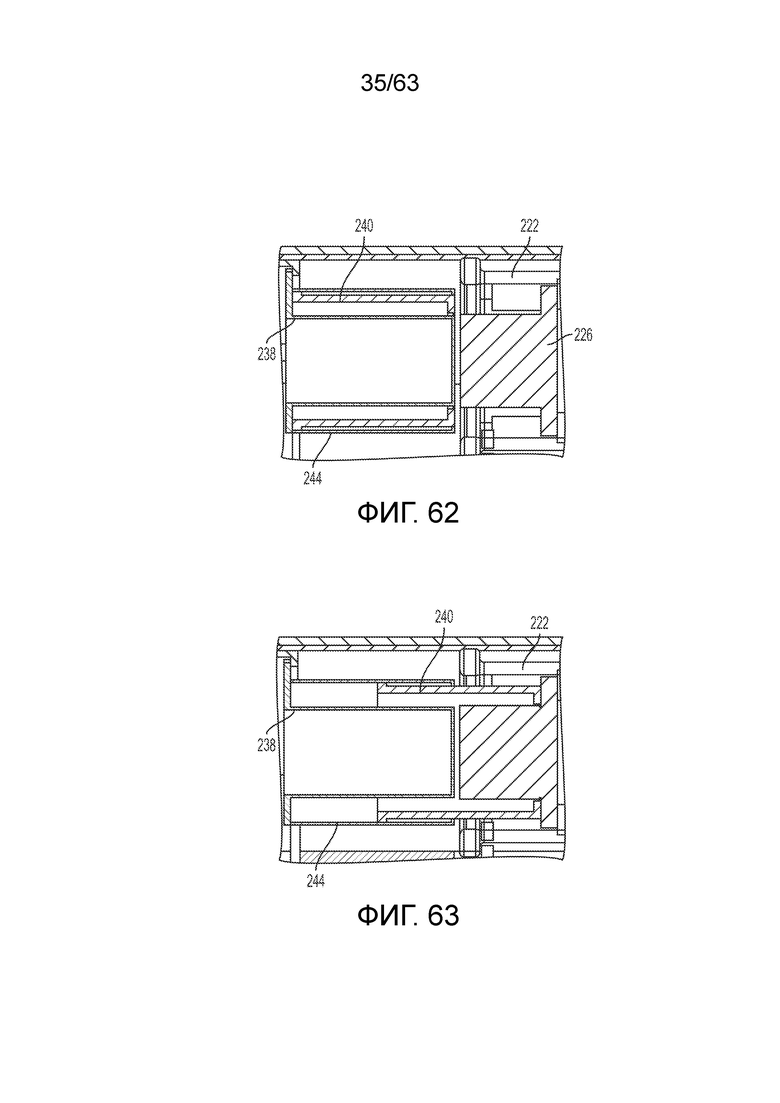
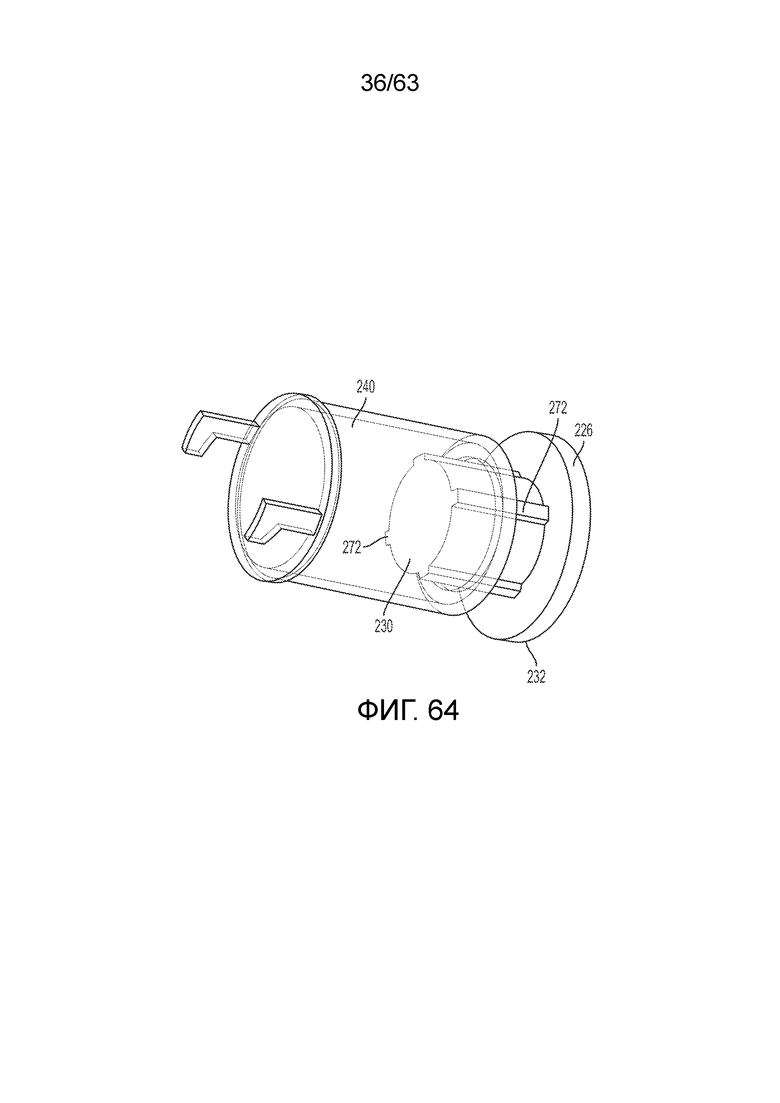

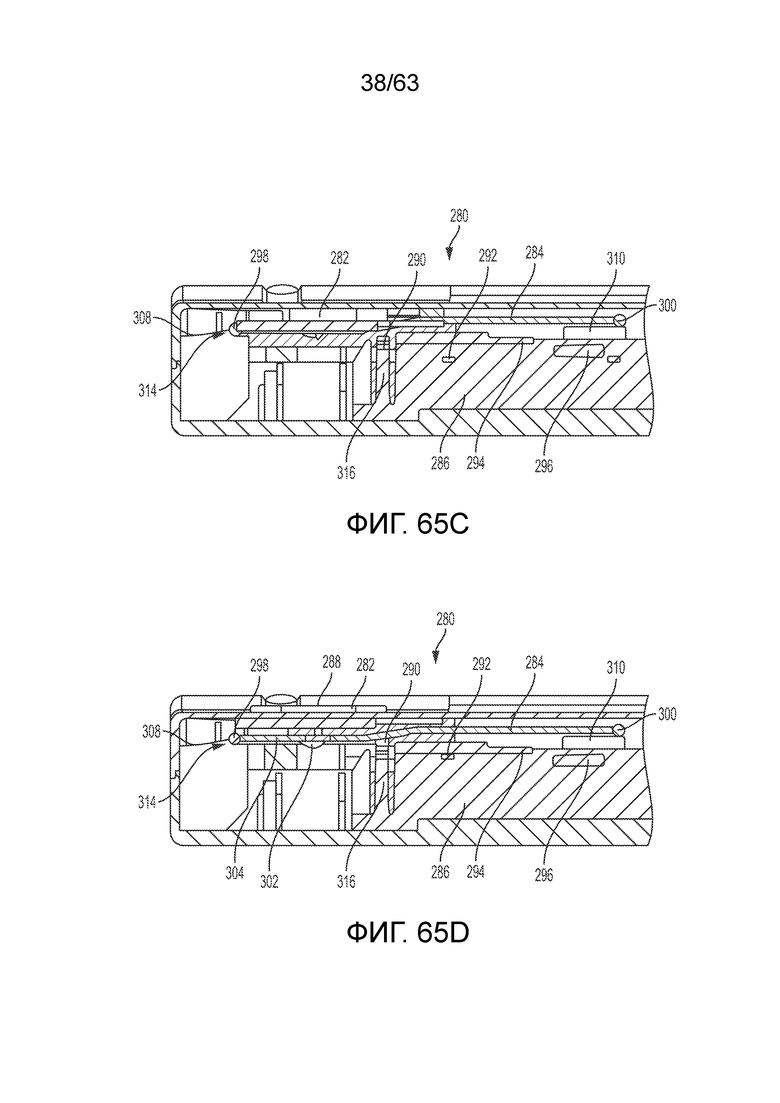
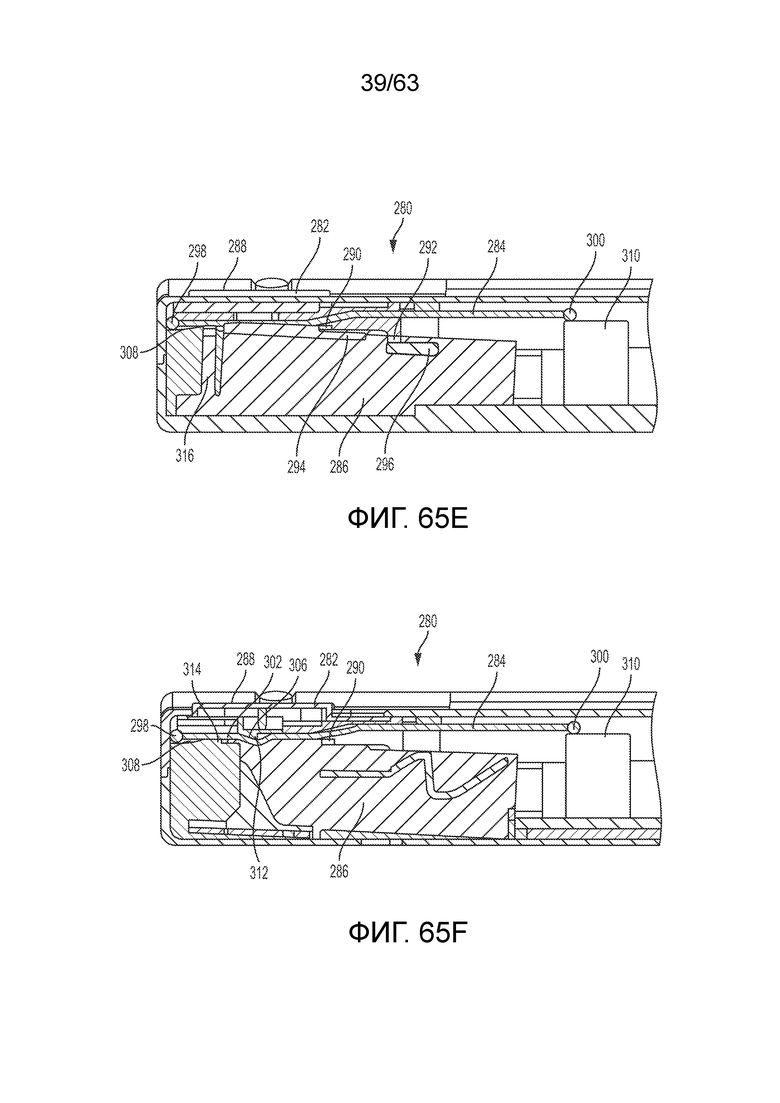
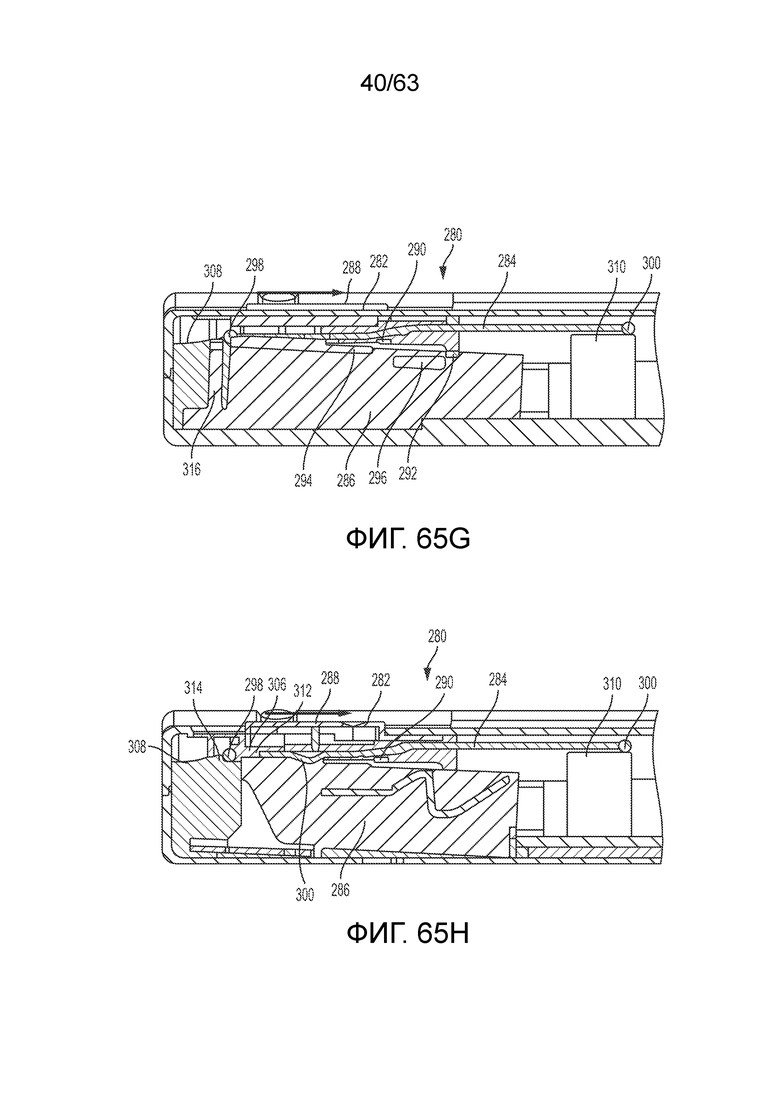
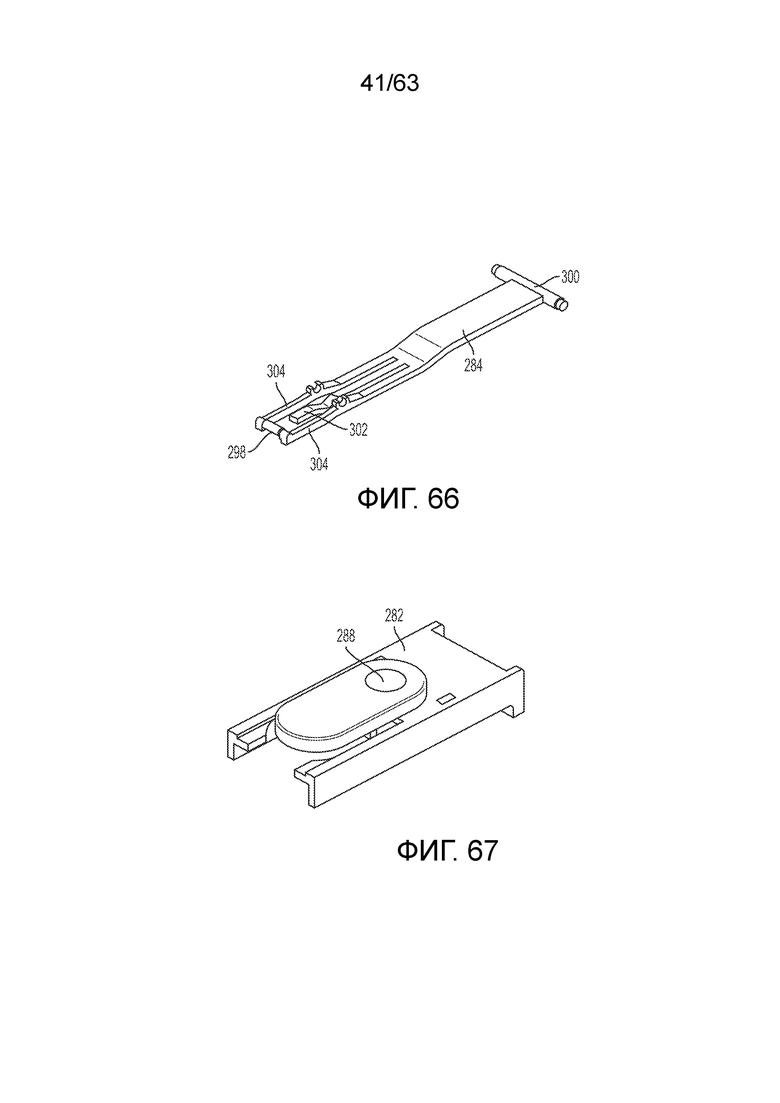
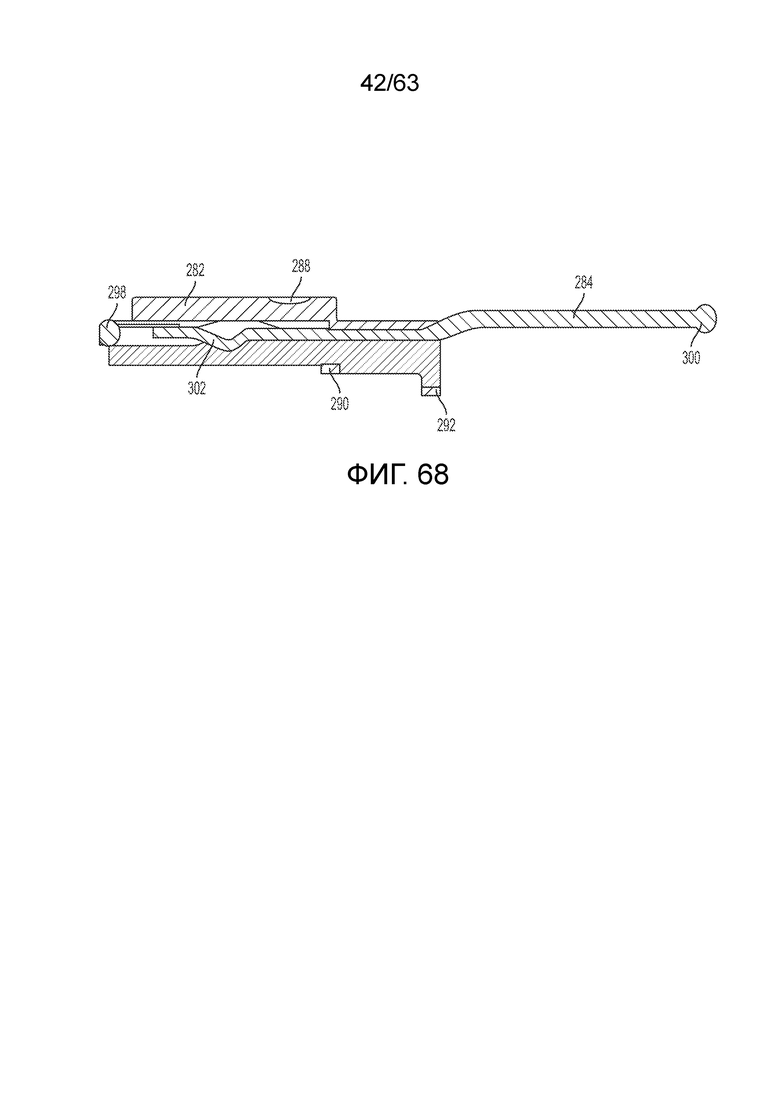
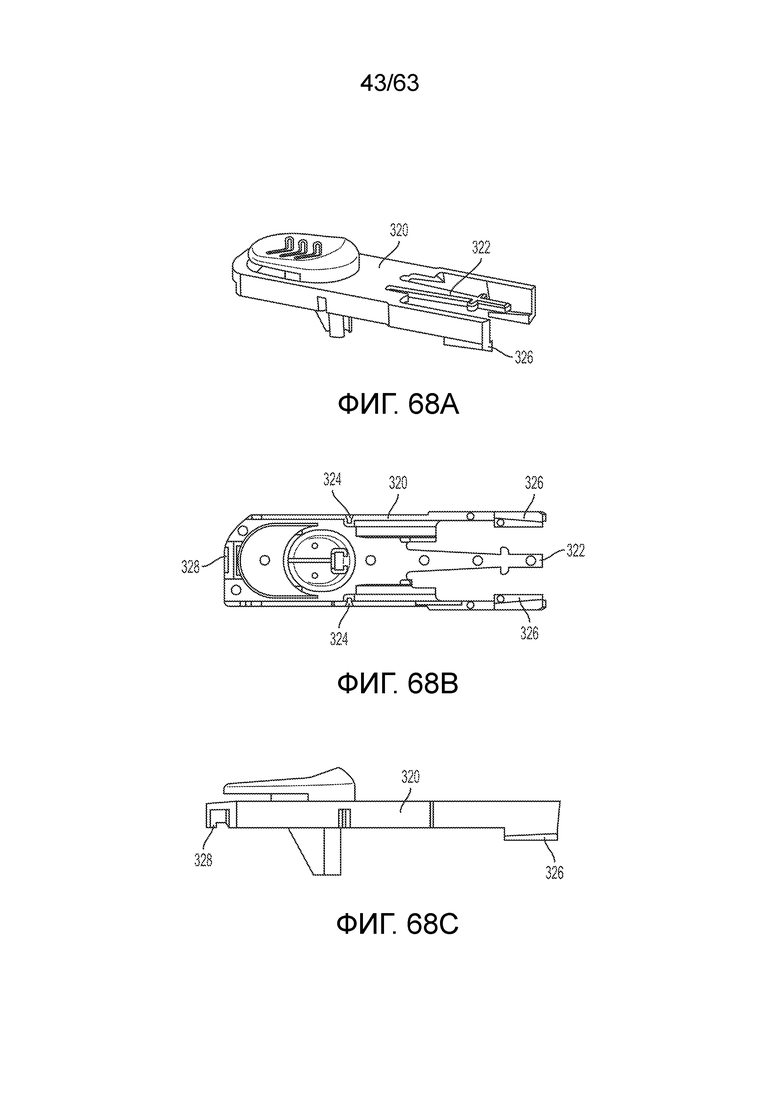
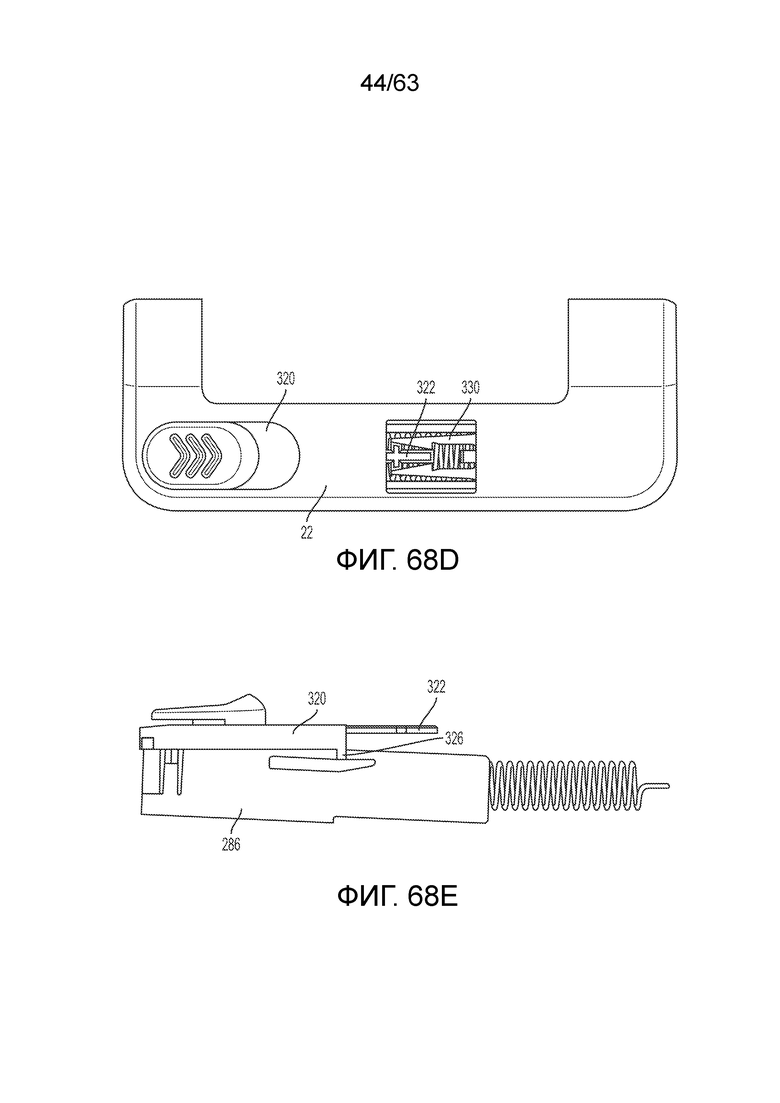
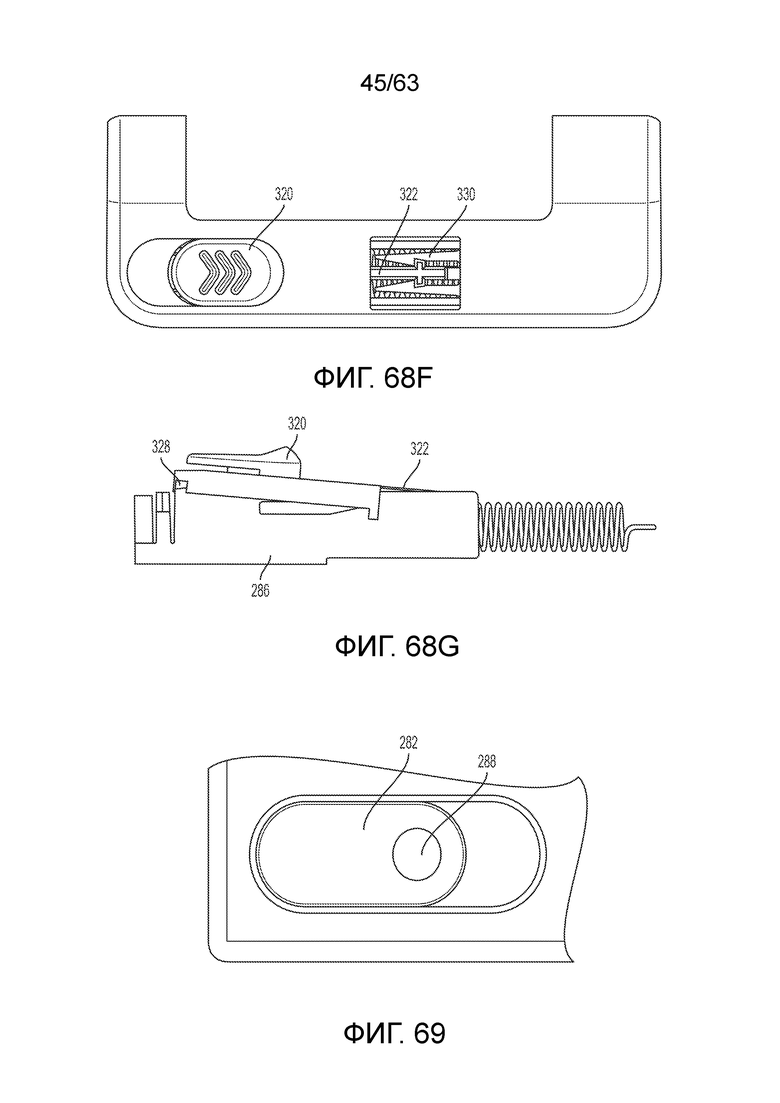
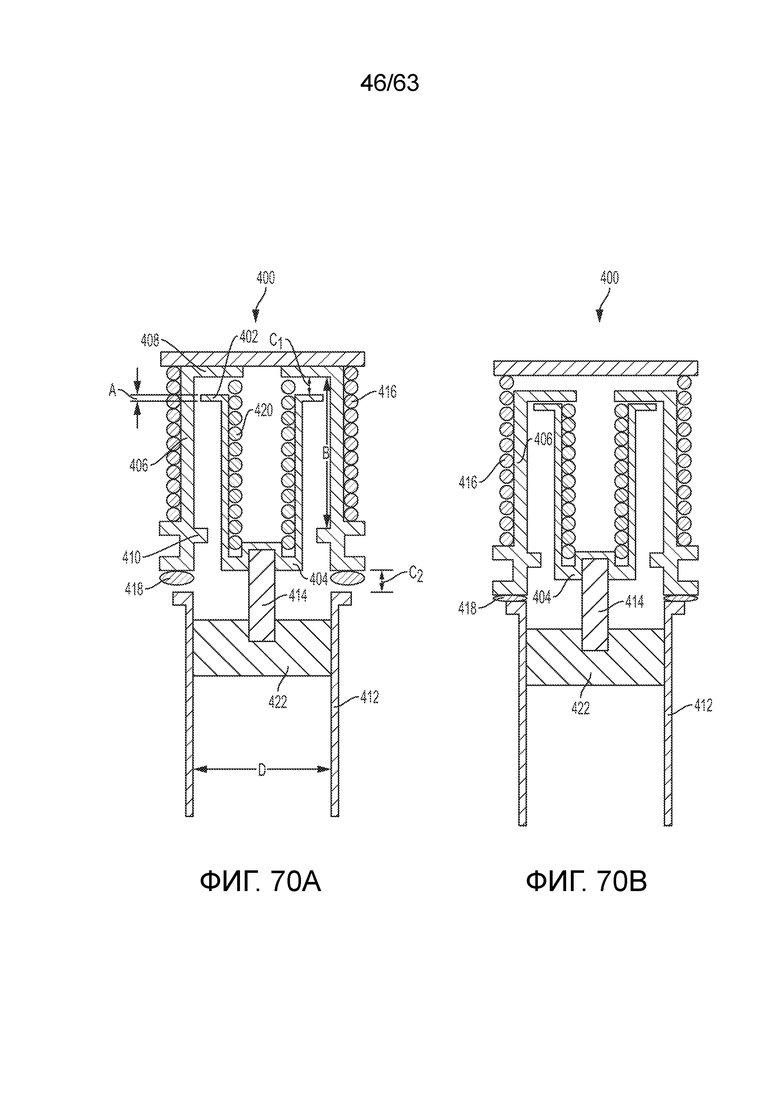
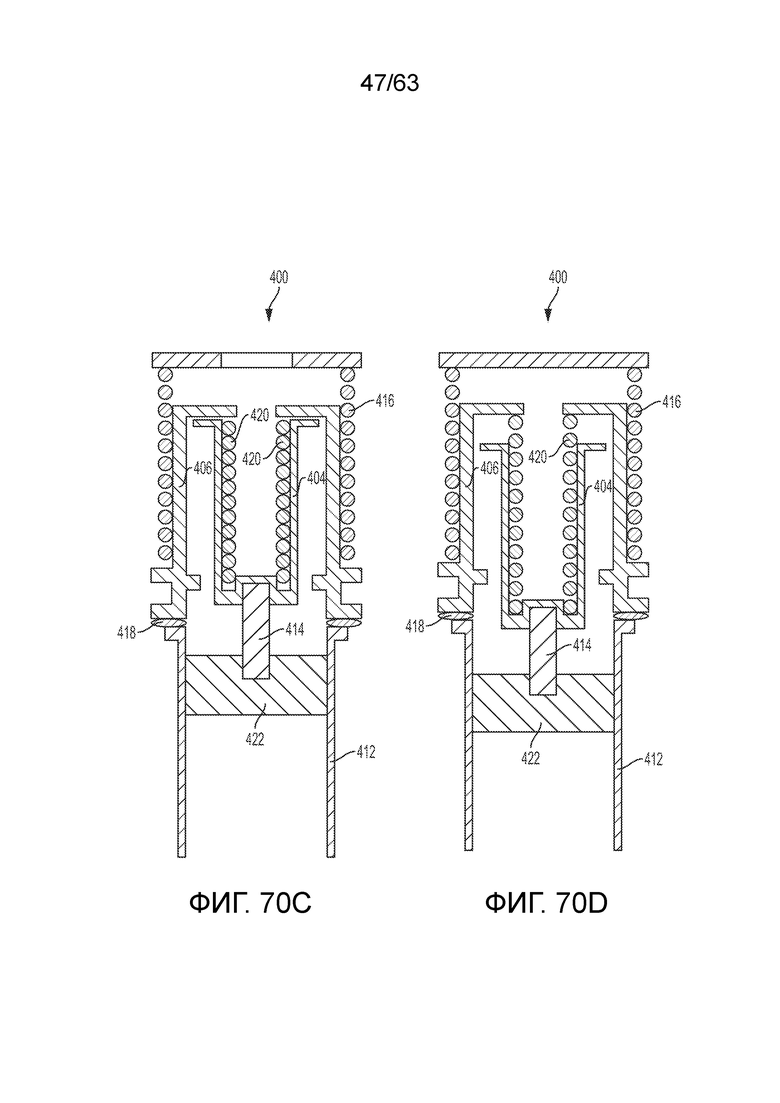
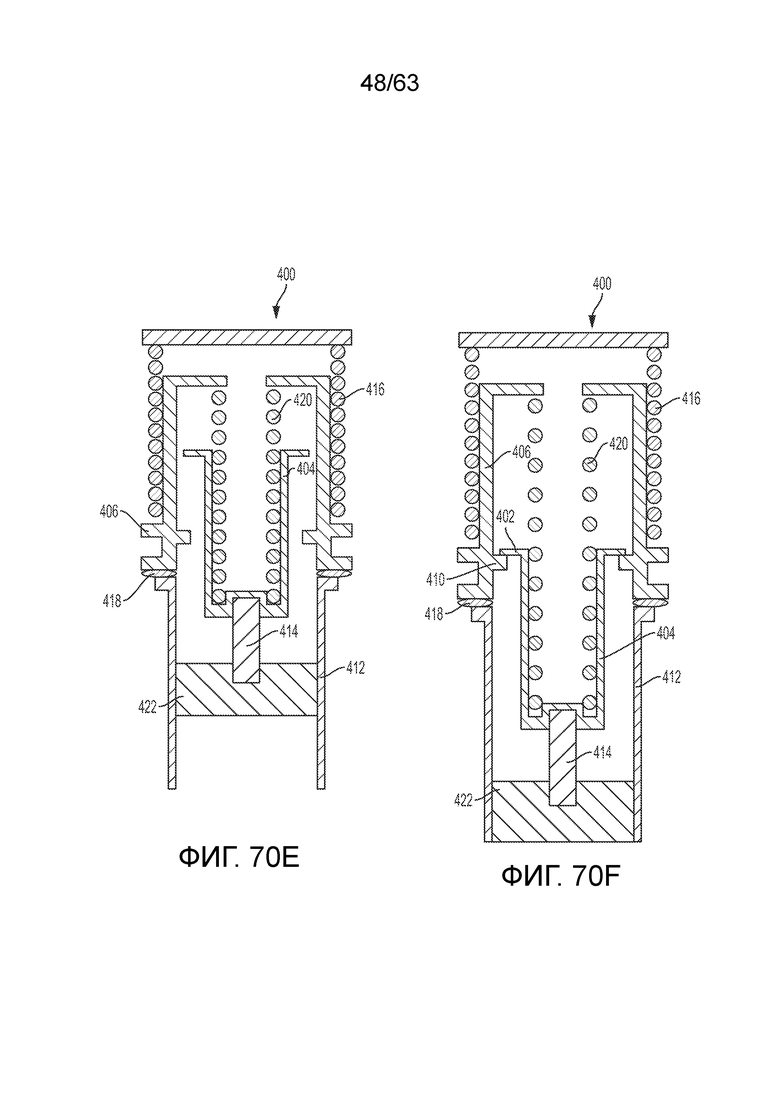
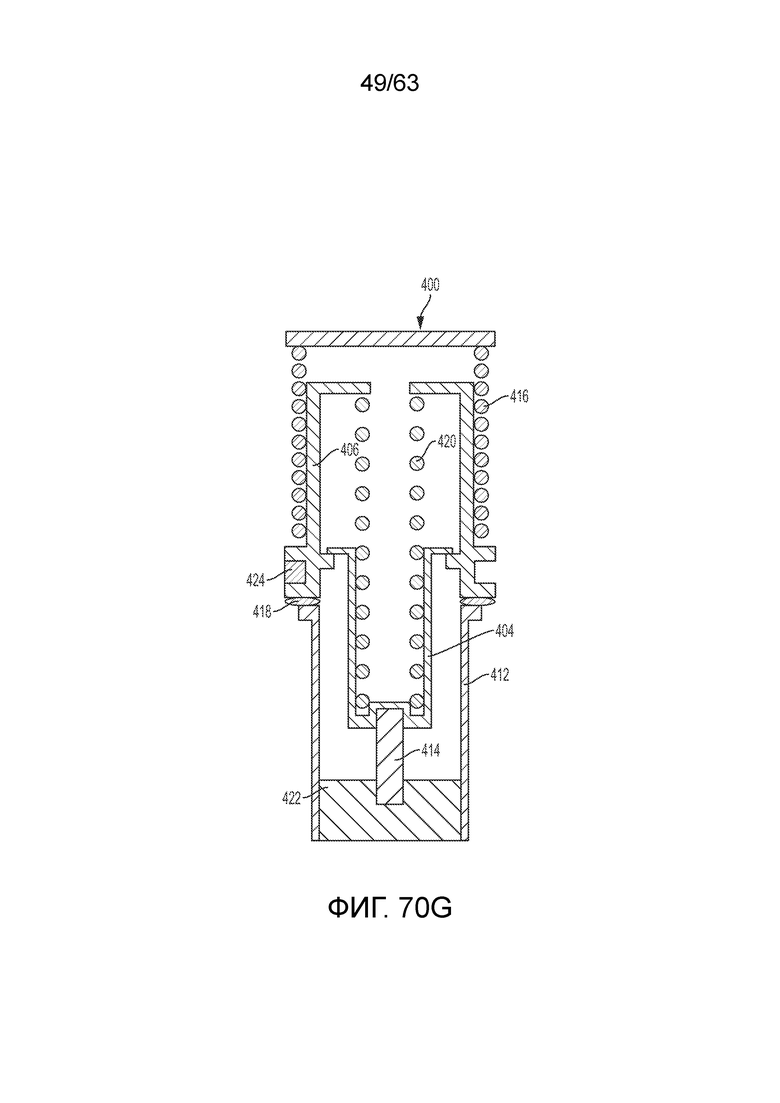
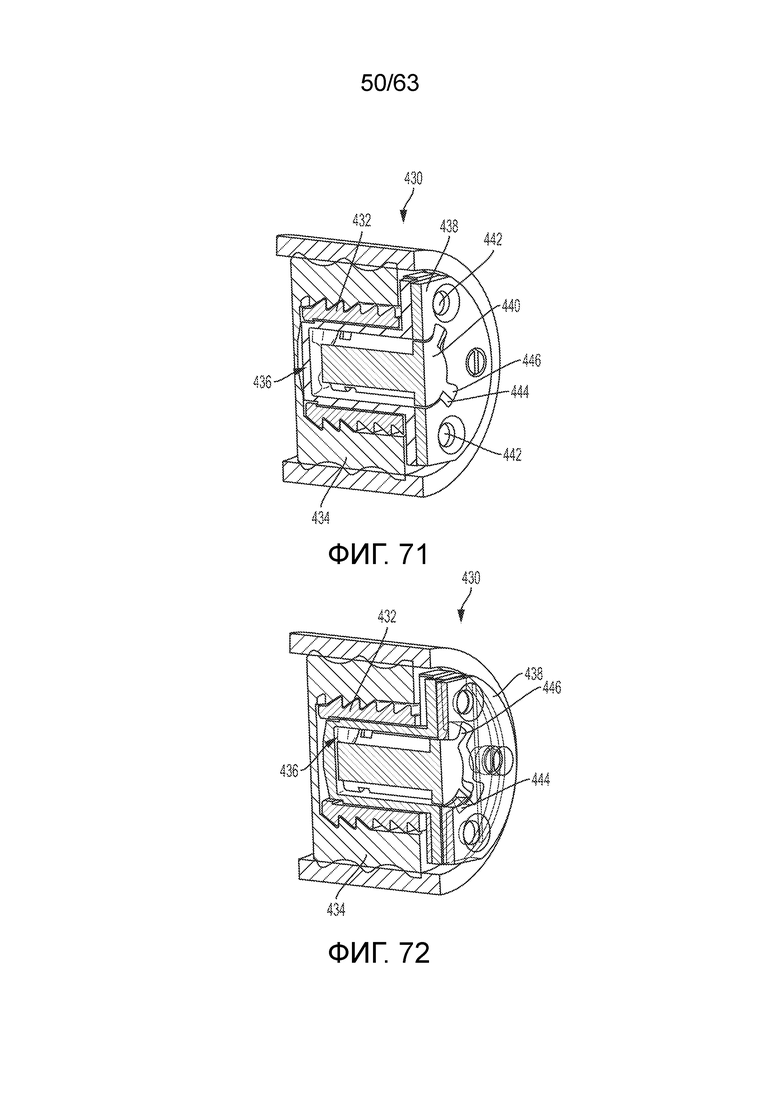
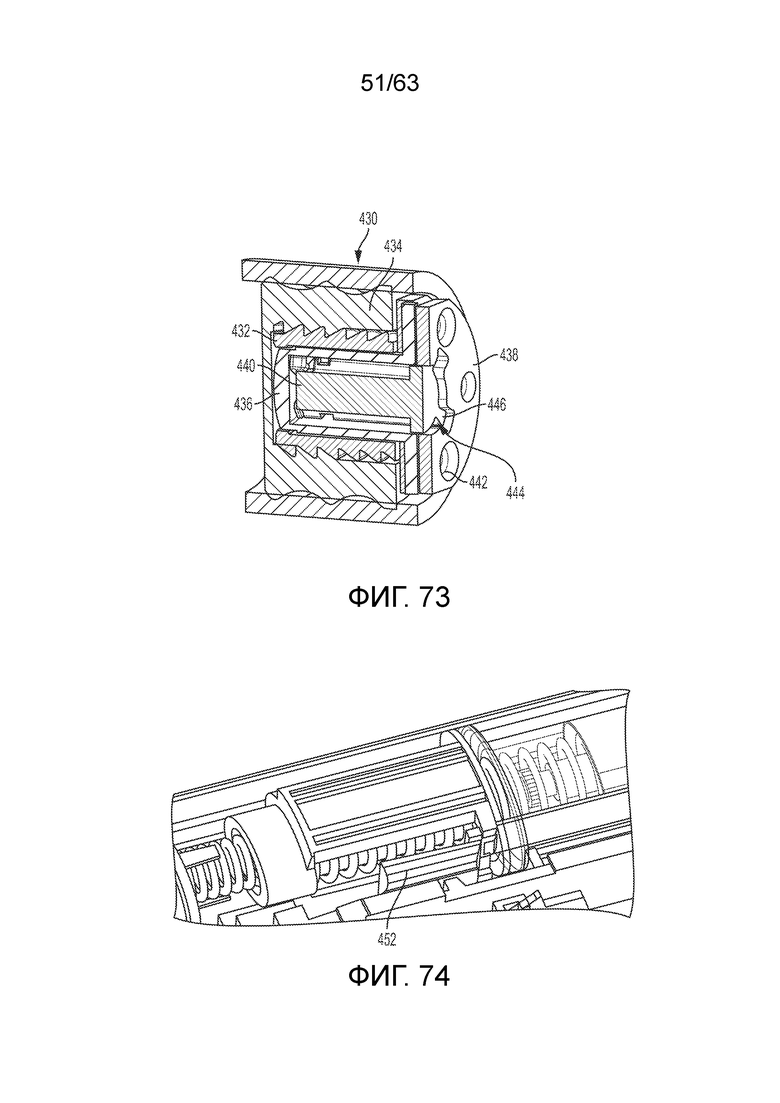
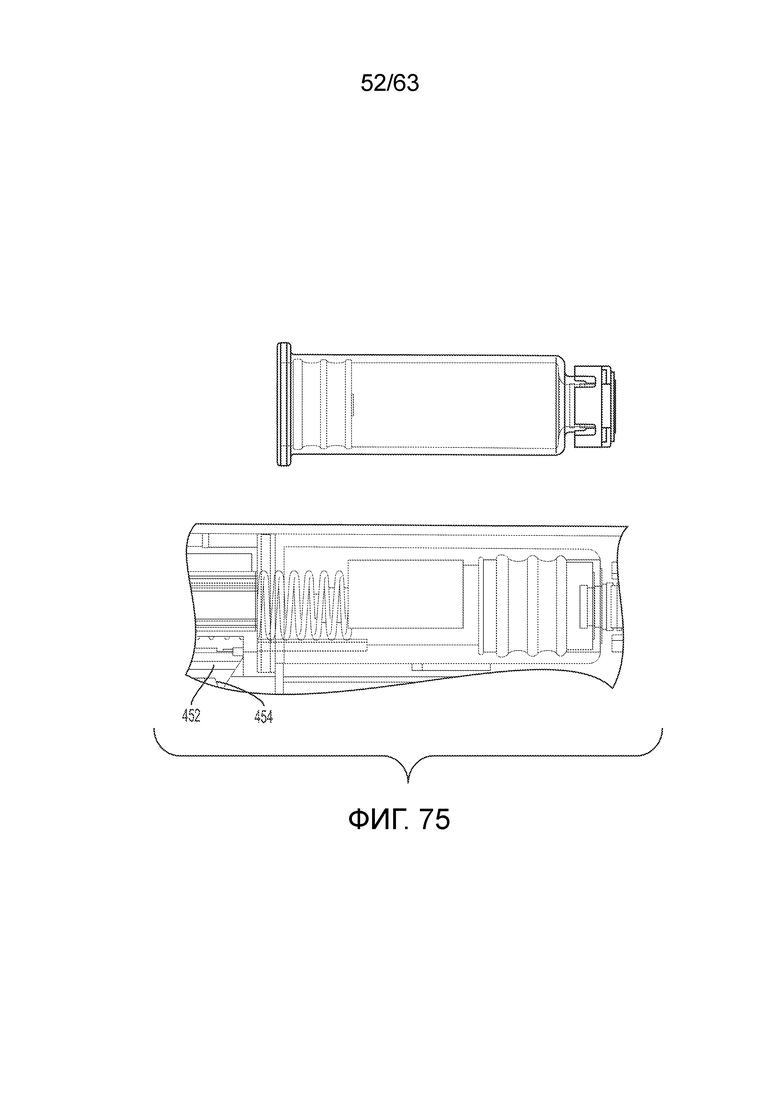
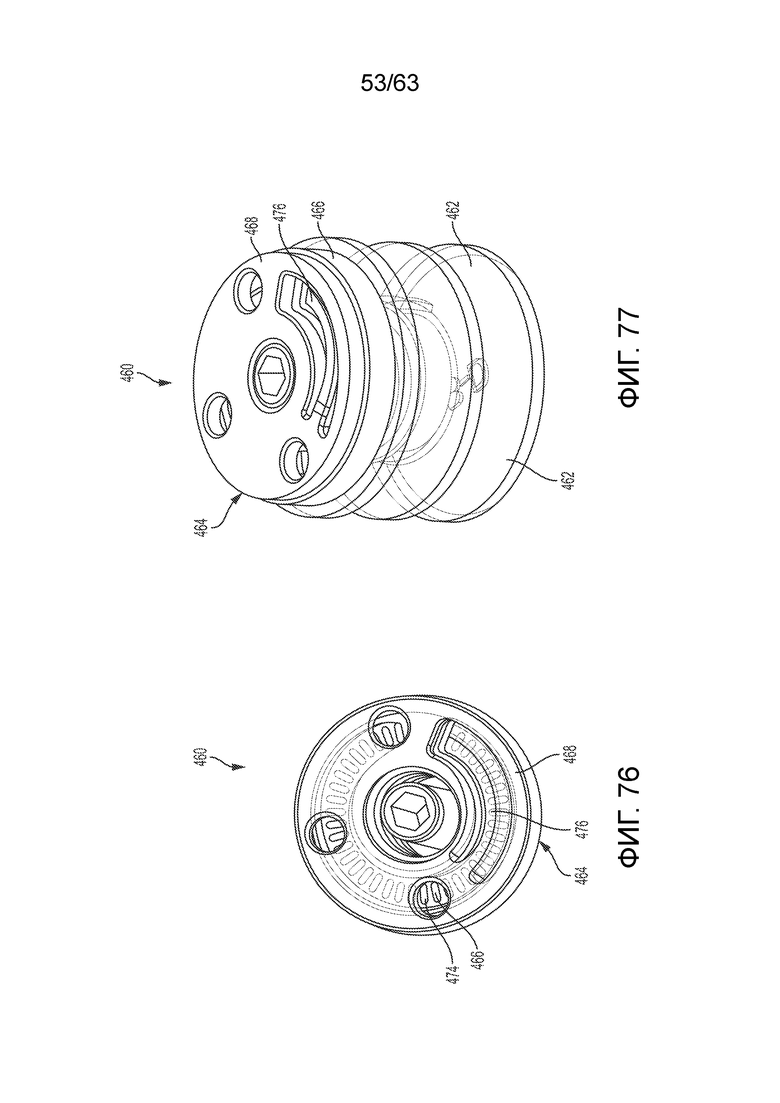
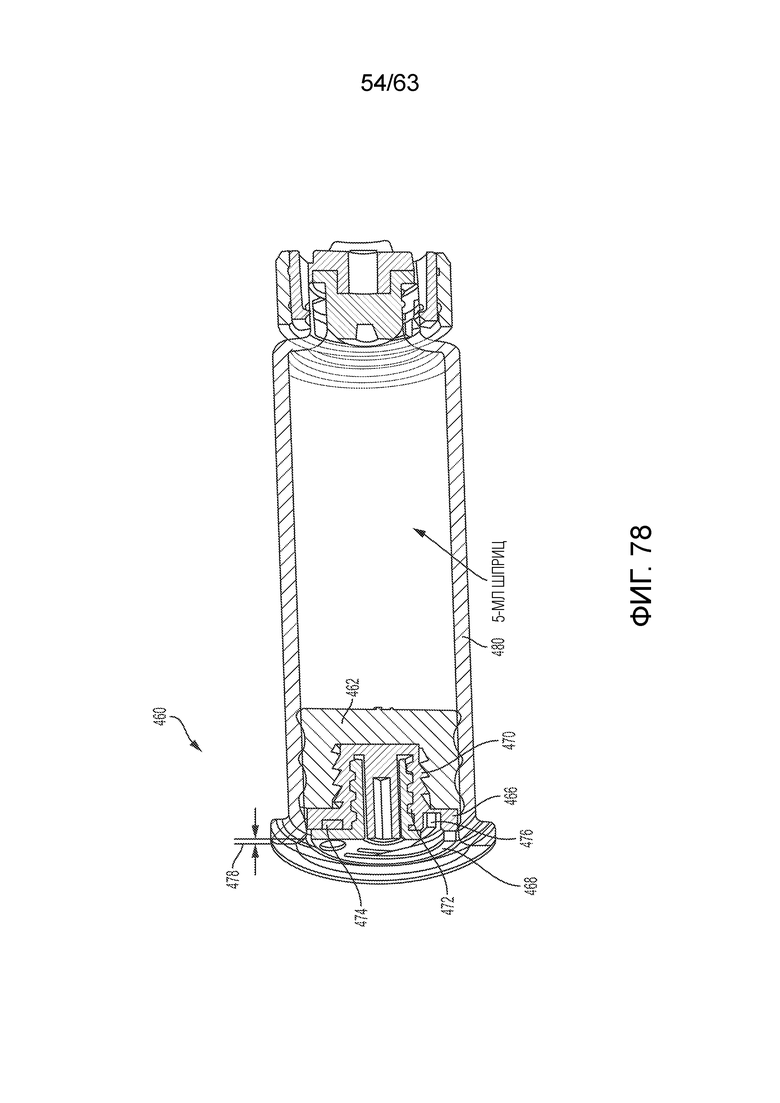
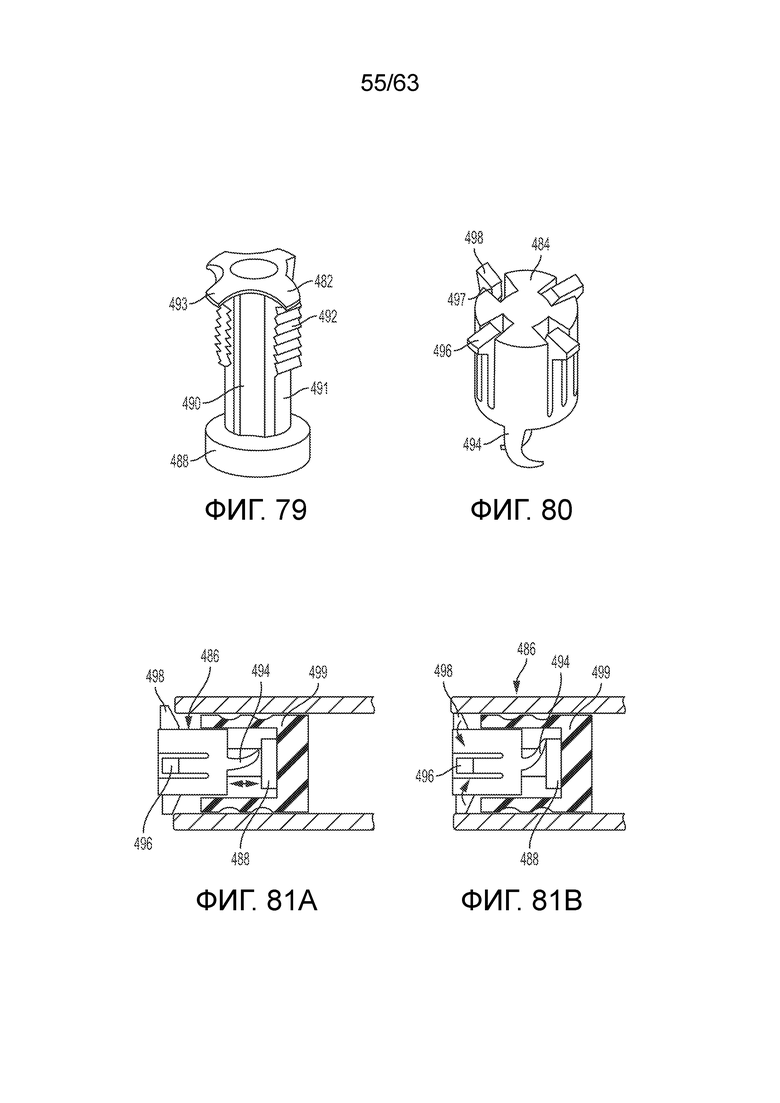
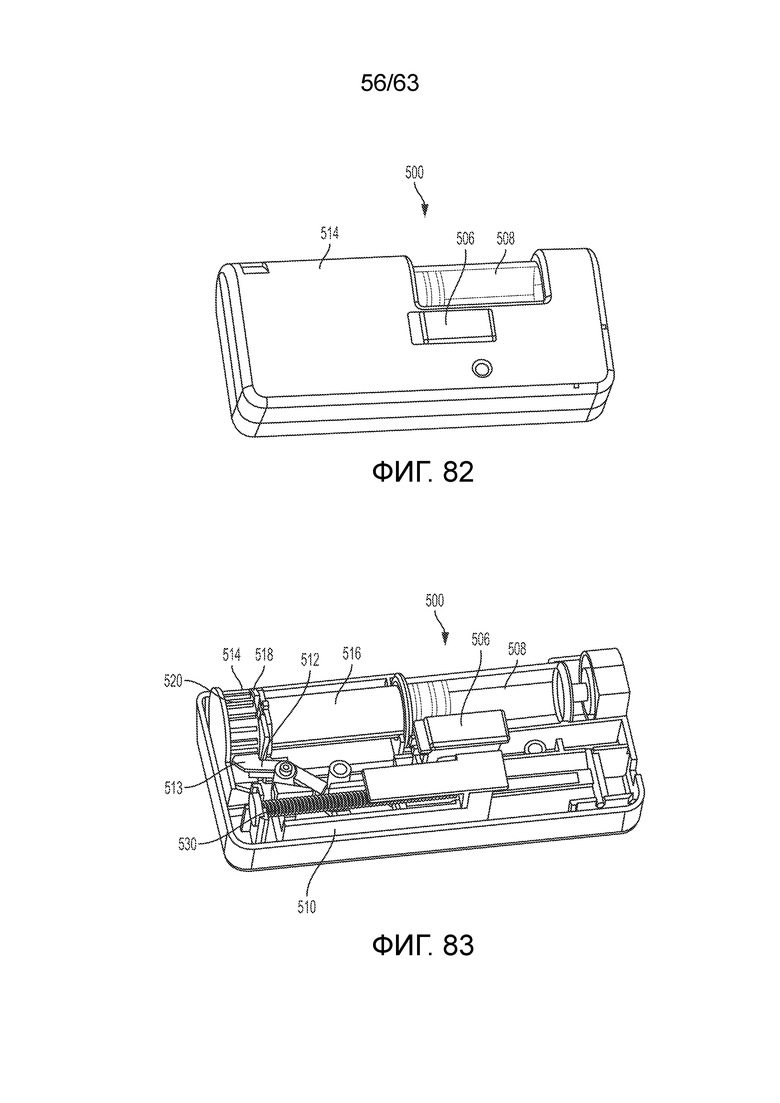
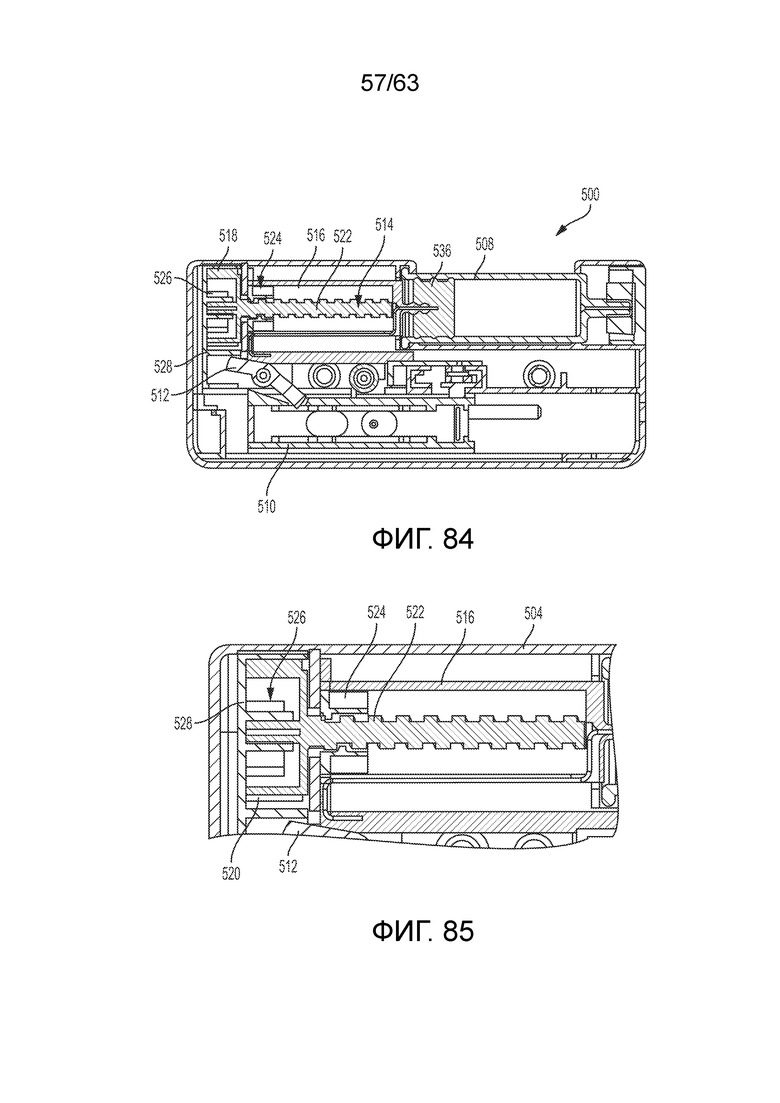


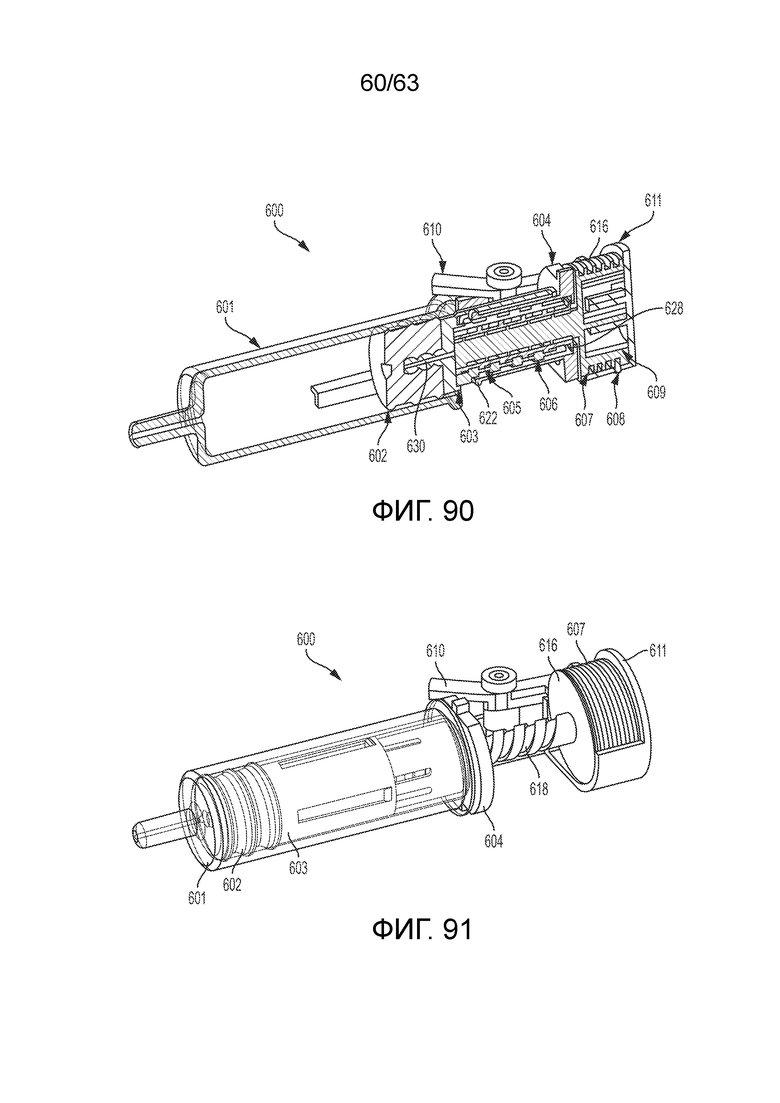
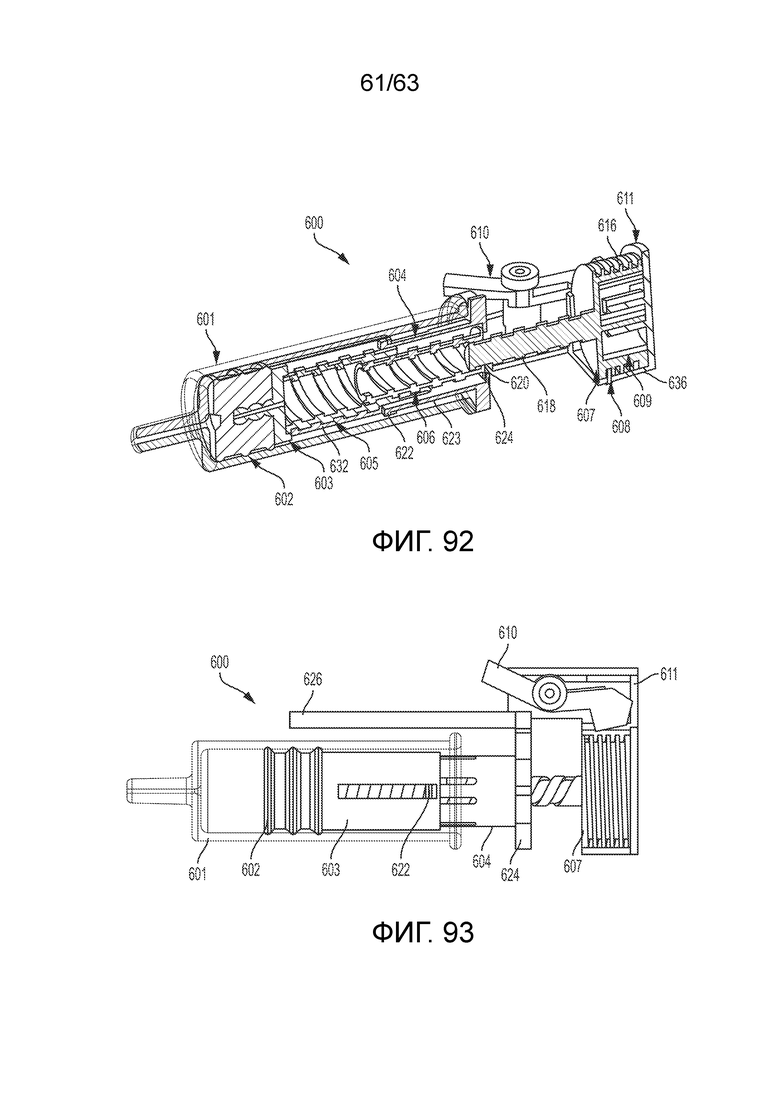

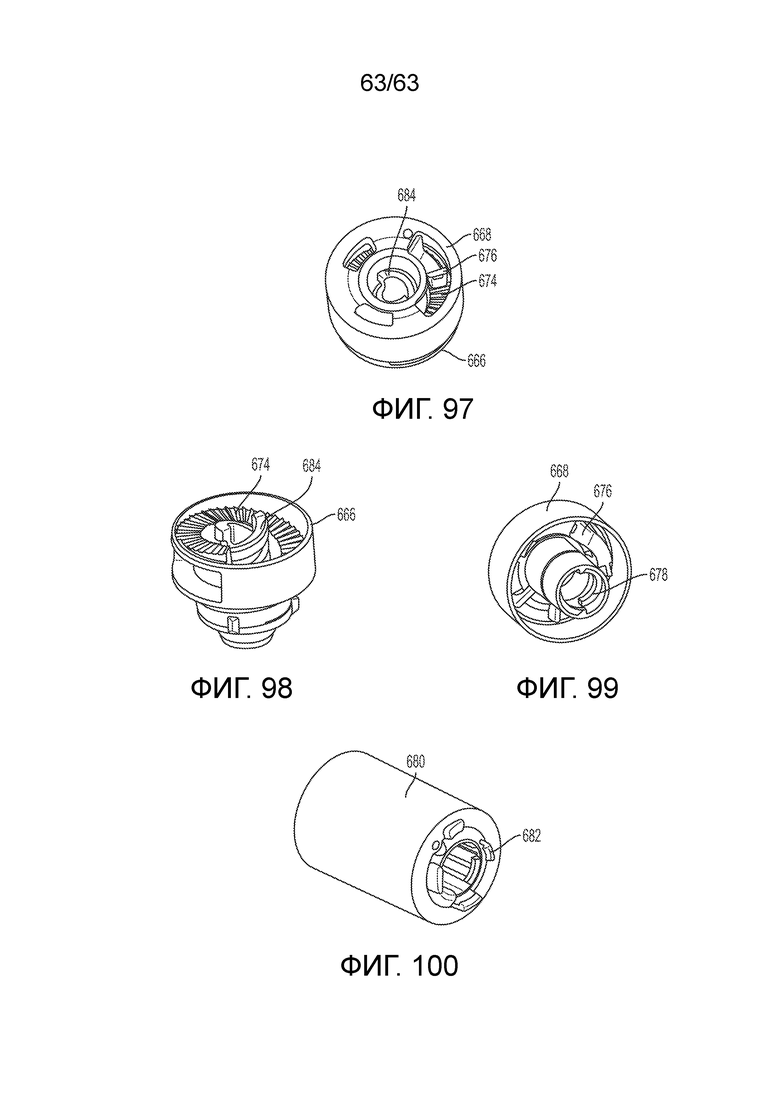
Изобретение относится к медицинской технике, а именно к приводным узлам иглы для системы доставки лекарств. При этом приводной узел иглы содержит: приводной блок иглы, имеющий направляющую поверхность; челнок иглы, имеющий кулачковую поверхность, причем челнок иглы выполнен с возможностью перемещения вдоль вертикальной оси между первым положением и вторым положением, челнок иглы выполнен с возможностью перемещения между первым и вторым положениями посредством зацепления между направляющей поверхностью приводного блока иглы и кулачковой поверхностью челнока иглы; и иглу, вмещенную в челнок иглы. Причем челнок иглы содержит смещающий элемент, выполненный с возможностью перемещения челнока иглы из первого положения во второе положение, когда направляющая поверхность приводного блока иглы расцеплена с кулачковой поверхностью челнока иглы. 2 н. и 8 з.п. ф-лы, 100 ил.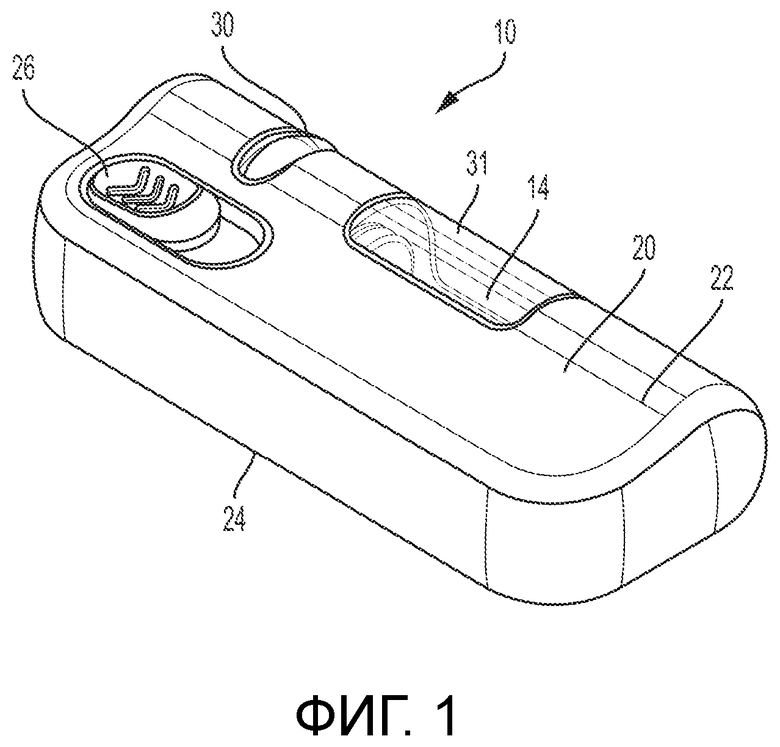
1. Приводной узел иглы для системы доставки лекарств, при этом приводной узел иглы содержит:
приводной блок иглы, имеющий направляющую поверхность;
челнок иглы, имеющий кулачковую поверхность, причем челнок иглы выполнен с возможностью перемещения вдоль вертикальной оси между первым положением и вторым положением, челнок иглы выполнен с возможностью перемещения между первым и вторым положениями посредством зацепления между направляющей поверхностью приводного блока иглы и кулачковой поверхностью челнока иглы; и
иглу, вмещенную в челнок иглы, причем
челнок иглы содержит смещающий элемент, выполненный с возможностью перемещения челнока иглы из первого положения во второе положение, когда направляющая поверхность приводного блока иглы расцеплена с кулачковой поверхностью челнока иглы.
2. Узел по п. 1, дополнительно содержащий направляющую стойку, при этом челнок иглы перемещается вдоль направляющей стойки.
3. Узел по п. 2, в котором направляющая стойка является прямолинейной.
4. Узел по п. 1, в котором кулачковая поверхность челнока иглы содержит первый кулачковый элемент и второй кулачковый элемент, отстоящий от первого кулачкового элемента, и при этом направляющая поверхность является непрямолинейной и содержит первую сторону и вторую сторону, расположенную противоположно первой стороне.
5. Узел по п. 4, в котором второй кулачковый элемент челнока иглы выполнен с возможностью зацепления второй стороны направляющей поверхности, чтобы перемещать челнок иглы из первого положения во второе положение, и при этом первый кулачковый элемент челнока иглы выполнен с возможностью зацепления первой стороны направляющей поверхности, чтобы перемещать челнок иглы из второго положения в первое положение.
6. Система доставки лекарств для инъекции лекарственного препарата, при этом система содержит:
корпус;
приводной узел иглы, помещенный внутри корпуса, причем приводной узел иглы содержит:
приводной блок иглы, имеющий направляющую поверхность, причем приводной блок иглы выполнен с возможностью перемещения между первым положением и вторым положением;
челнок иглы, имеющий кулачковую поверхность, причем челнок иглы является перемещаемым вдоль вертикальной оси между первым положением и вторым положением, челнок иглы выполнен с возможностью перемещения между первым и вторым положениями посредством зацепления между направляющей поверхностью приводного блока иглы и кулачковой поверхностью челнока иглы; и
иглу, вмещенную в челнок иглы; и
кнопочный исполнительный элемент, по меньшей мере, частично вмещенный в корпус,
причем перемещение кнопочного исполнительного элемента сконфигурировано с возможностью перемещения приводного блока иглы из первого положения во второе положение и причем перемещение приводного блока иглы из первого положения во второе положение сконфигурировано с возможностью вызова перемещения челнока иглы из первого положения во второе положение, причем
челнок иглы содержит смещающий элемент, выполненный с возможностью перемещения челнока иглы из первого положения во второе положение, когда направляющая поверхность приводного блока иглы расцеплена с кулачковой поверхностью челнока иглы.
7. Система по п. 6, дополнительно содержащая направляющую стойку, продолжающуюся от корпуса, при этом челнок иглы перемещается вдоль направляющей стойки.
8. Система по п. 7, в которой направляющая стойка продолжается перпендикулярно от корпуса.
9. Система по п. 6, в которой система дополнительно содержит подкладку, выполненную с возможностью зацепления с иглой, когда привод иглы находится во втором положении.
10. Система по п. 9, в которой подкладка вмещается в кронштейн подкладки, имеющий кулачковую поверхность, выполненную с возможностью зацепления с соответствующей рабочей поверхностью кулачка на корпусе, чтобы перемещать подкладку под иглу.
| US 2011040254 A1, 17.02.2011 | |||
| US 2013204198 A1, 08.08.2013 | |||
| WO 2012108955 A2, 19.08.2012. |

