Изобретение относится к устройствам для магнитного воздействия на живые организмы, в которых индуктор включен как нагрузка автогенератора колебаний, которые могут применяться в медицине и ветеринарии для осуществления магнитного физиотерапевтического или магнитостимулирующего воздействия на ткани и внутренние органы человека или животного с целью устранения болевых синдромов, стимуляции процессов жизнедеятельности и регенерации, ускорения восстановления тканей человека и животных после инвазивных воздействий и травм.
Известно устройство для магнитного воздействия на живые организмы по патенту РФ №2714433, содержащее источник питания, автогенератор колебаний и соединенный с ним индуктор, которое характеризуется тем, что автогенератор колебаний работает на резонансной частоте индуктора, который выполнен в виде плоской бифилярной катушки с незамкнутыми обмотками, подключенной к автогенератору колебаний в качестве нагрузки в виде последовательного колебательного контура, обеспечивающей синусоидальную форму выходного тока на резонансной частоте катушки, при этом бифилярная катушка выполнена в виде плоского диска, в котором на диэлектрической подложке размещены провода ее обмоток в виде двух концентрично расположенных спиралей из двух примыкающих друг к другу проводов различных обмоток, при этом незамкнутый вывод одной из обмоток бифилярной катушки расположен на внутренней в радиальном направлении катушки оконечности указанной обмотки, а незамкнутый вывод второй из обмоток катушки индуктора расположен на наружной в радиальном направлении катушки оконечности указанной обмотки, причем противоположные выводы обеих обмоток катушки подключены к соответствующим выводам автогенератора колебаний.
Способ работы данного технического решения, как наиболее близкий к заявленному по техническому существу и достигаемому результату, принят в качестве его прототипа. В известном способе обеспечивается формирование индуктором направленного магнитного воздействия на ткани и органы человека с формированием негомогенного магнитного поля конусоидальной формы с обеспечением максимума интенсивности такого воздействия, т.е. максимума индукции магнитного поля, расположенного в вершине указанного конуса. Выполнение устройства в компактной эргономичной форме повышает уровень положительных эмоций пользователей при его применении, способствует приверженности пациентов к лечению, т.е к комплаентности, что обуславливает более высокие показатели эффективности процесса лечения.
Недостатком известного способа является то, что в нем возбуждение электрических колебаний, определяющих магнитное поле индуктора, происходит не точно на резонансной частоте индуктора. Это связано с неизбежными временными задержками распространения сигнала на компонентах автогенератора колебаний. При этом электрические колебания возникают не на резонансной частоте индуктора, а с некоторым частотным сдвигом. В результате энергетические преимущества резонансного способа получения колебаний не используются в полной мере и подобные устройства потребляют бесполезную реактивную энергию. Кроме того, в связи с появлением обратного канала передачи реактивной энергии в источник питания, изменяется форма генерируемого магнитного поля.
Задачей заявляемого изобретения является обеспечение точной настройки на резонансную частоту индуктора устройства для магнитного воздействия на живые организмы, а также автоматическое управление этой настройкой с заданной точностью.
Сущность заявленного технического решения выражается в следующей совокупности существенных признаков, достаточной для решения указанной заявителем технической проблемы и получения обеспечиваемого изобретением технического результата.
Согласно изобретению способ точной настройки на резонансную частоту индуктора устройства для магнитного воздействия на живые организмы, которое включает источник питания, автогенератор колебаний с нагрузкой в виде индуктора, включенного в цепь положительной обратной связи по току автогенератора колебаний, отличается тем, что в цепь положительной обратной связи по току автогенератора колебаний включают опережающую дифференцирующую фазокомпенсирующую цепь, которую выполняют в виде последовательно соединённых конденсатора и резистора, при этом точную настройку на резонансную частоту индуктора осуществляют путем изменения сопротивления резистора.
Кроме того, заявленное техническое решение характеризуется наличием ряда дополнительных факультативных признаков, а именно:
- резистор выполняют в виде резистора заранее подобранного постоянного сопротивления;
- резистор выполняют в виде резистора подстроечного или переменного сопротивления, управляемого вручную;
- резистор выполняют в виде набора дискретных прецизионных резисторов, переключаемых электронными ключами;
- резистор выполняют в виде цифрового потенциометра, сопротивлением которого по цифровой шине управляет микроконтроллер, на вход которого подают сигнал рассогласования фаз от фазового детектора, входы которого соединяют с выходами компараторов, на входы которых подают сигналы, соответственно, напряжения на индукторе и тока в индукторе.
Заявленная совокупность существенных признаков обеспечивает достижение технического результата, который заключается в том, что в любом варианте выполнения резистора обеспечивается возможность точной настройки устройства для магнитного воздействия на живые организмы на резонансную частоту его индуктора с возможностью управление этой настройкой с заданной точностью.
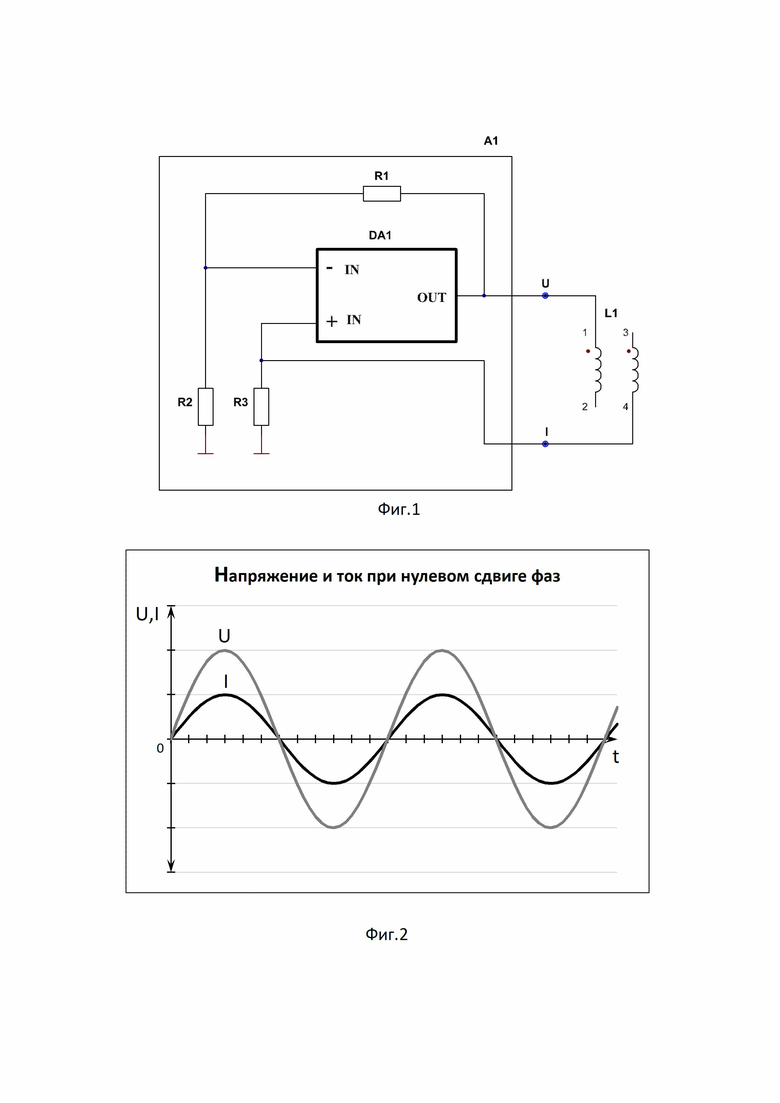
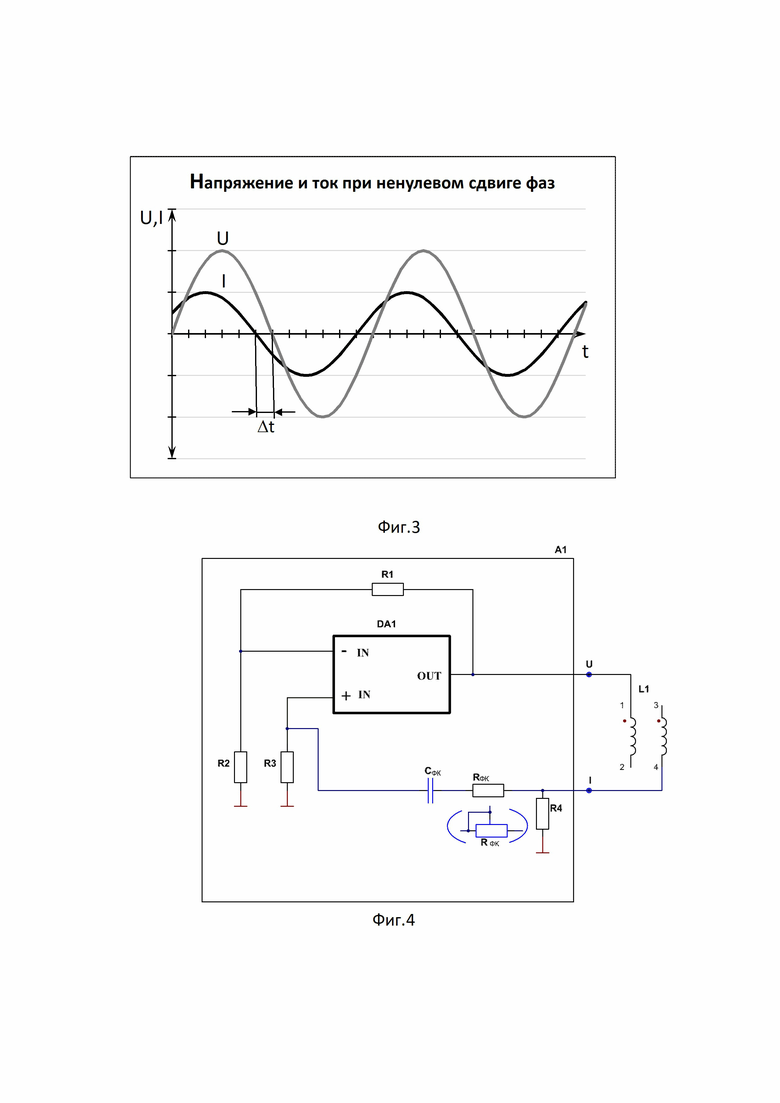
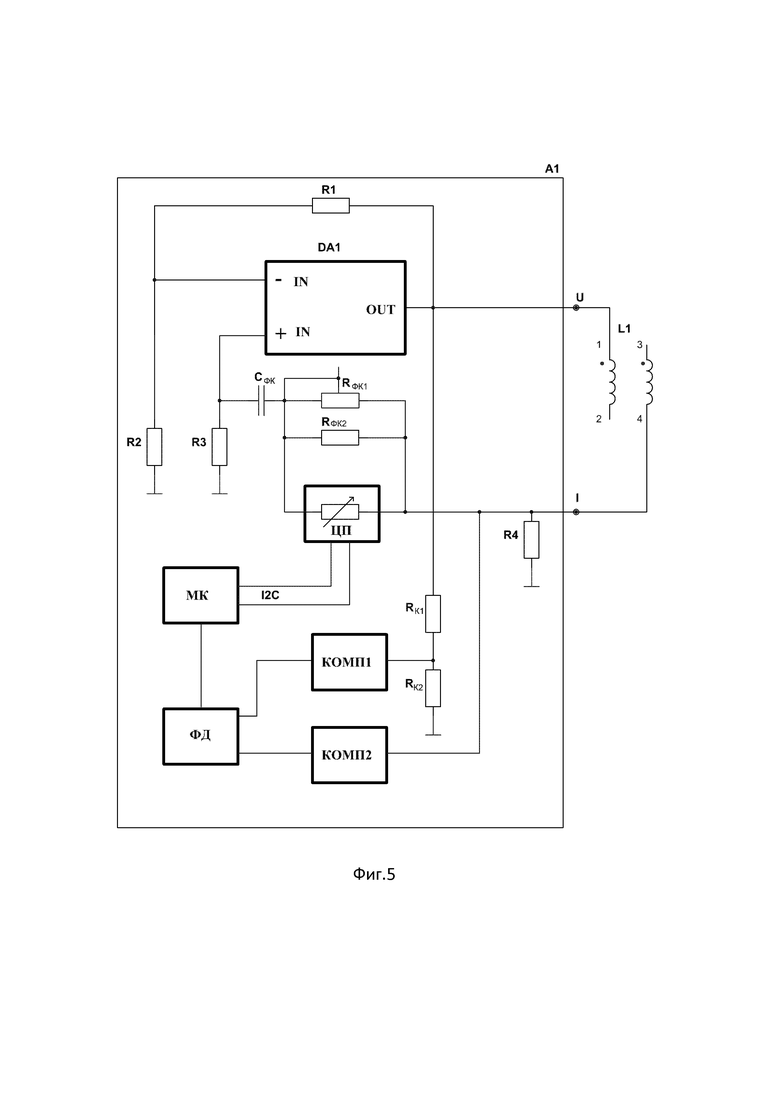
Сущность изобретения поясняется чертежами, где на фиг.1 изображена функциональная схема автогенератора колебаний с нагрузкой в виде индуктора в цепи ПОСТ, на фиг.2 - график сигналов напряжения и тока в цепи индуктора при нулевом сдвиге фаз, на фиг.3 - график сигналов напряжения и тока в цепи индуктора при ненулевом сдвиге фаз, на фиг.4 - функциональная схема автогенератора колебаний с фазокомпенсирующей цепью, на фиг.5- функциональная схема автогенератора колебаний с фазокомпенсирующей цепью и автоматической настройкой на резонансную частоту индуктора.
На чертежах позициями и буквами обозначены:
А1- узел автогенератора;
DA1- усилительный каскад с обратными связями - ООСН и ПОСТ;
+IN1,-IN1- прямой и инвертирующий входы усилительного каскада;
OUT - выход узла автогенератора;
R1, R2 - резисторы, определяющие коэффициент передачи автогенератора
по напряжению в цепи ООСН;
R3- резистор (датчик тока) цепи ПОСТ (для фиг.1);
R3- резистор делителя в фазокомпенсирующей цепи (для фиг.4, фиг.5);
R4 - резистор (датчик тока) цепи ПОСТ;
RФК - резистор фазокомпенсирующей цепи;
СФК - конденсатор фазокомпенсирующей цепи;
RФК1, RФК2 - резисторы фазокомпенсирующей цепи, сужающие диапазон регулировки;
RК1, RК2 - резисторы делителя напряжения, выравнивающие крутизну сигналов напряжения и тока на входах компараторов;
ФД- фазовый детектор;
КОМП1, КОМП2- компараторы, преобразующие сигналы напряжения и тока из синусоидальной формы в прямоугольную;
МК- микроконтроллер;
ЦП - цифровой потенциометр;
I2C - шина управления цифровым потенциометром;
L1- индуктор;
1-2, 3-4 - выводы L1;
Δ t- временной сдвиг фаз;
U - напряжение на индукторе;
I - ток в индукторе.
Заявленное устройство работает следующим образом.
Автогенератор колебаний А1 (фиг.1) в идеальном случае автоматически работает на резонансной частоте индуктора L1. В этой обобщённой схеме резисторы R1 и R2 обеспечивают отрицательную обратную связь по напряжению (ООСН) и определяют коэффициент передачи автогенератора колебаний по напряжению. При подаче питания на узел А1 через датчик тока, резистор R3, замыкается и поддерживается ПОСТ. При этом выполняются классические условия возникновения автоколебаний - баланс фаз и баланс амплитуд. Напряжение на индукторе и ток через него находятся в фазе, т.е. сдвиг между ними составляет 0 градусов (фиг.2). В результате реактивные составляющие полного сопротивления индуктора L1 скомпенсированы, полное сопротивление индуктора L1 содержит только активную составляющую, ток через индуктор L1 и, соответственно, индукция магнитного поля, максимальны. Форма магнитного поля имеет явно выраженный максимум. Преимущества резонанса использованы в полной мере.
Однако, в действительности сигнал выходного напряжения, соответствующий разности сигналов: ООСН на входе - IN А1 и ПОСТ на входе +IN А1 из-за задержки распространения в А1 не может мгновенно появиться на выходе OUT А1. В результате сигнал напряжения на индукторе отстаёт по времени от сигнала тока в индукторе (фиг.3). Т.е. между ними появляется сдвиг фазы. Это означает появление реактивной, в данном случае емкостной составляющей полного сопротивления индуктора L1 и расстройку от резонансной частоты индуктора. Это приводит к появлению реактивной составляющей тока, бесполезно расходующей энергию источника питания и снижающей максимальную амплитуду тока в индукторе L1 и, соответственно, индукцию магнитного поля.
Для точной настройки возможно подключение последовательно с выходом А1 переменных или дискретно переключаемых конденсаторов, которые уменьшат емкостную составляющую полного сопротивления индуктора L1.
Однако, такой способ настройки крайне неудобен и неточен, так как эти конденсаторы должны:
- иметь достаточно большую номинальную емкость (0,01…0,1мкФ);
- пропускать значительные токи (до 1А);
- иметь минимальную погрешность емкости (менее 1%);
- иметь максимальную плавность или минимальную дискретность изменения емкости.
Одновременная реализация всех этих требований затруднительна, в связи с отсутствием соответствующей элементной базы.
Заявленный способ точного управления настройкой (СТУН) заключается в компенсации временной задержки Δt c помощью специальной фазокомпенсирующей цепи, включаемой в цепь ПОСТ. Сигнал напряжения на выходе этой цепи опережает сигнал напряжения на входе этой цепи. Эта цепь (фиг.4) включает в себя последовательно соединённые резистор R3 и дополнительные элементы- RфК и СФК , т.е. является дифференцирующей цепью.
Резистор R3 определяет входное сопротивление цепи ПОСТ, а также образует делитель напряжения ПОСТ с элементами RфК и СФК, определяющий глубину ПОСТ. Постоянная времени этой дифференцирующей цепи τ определяет время опережения выходного сигнала ПОСТ.
τ= (R3+ RфК )× СФК.
Изменяя эту постоянную времени, можно изменять время опережения выходного сигнала ПОСТ и, таким образом, компенсировать сдвиг фазы, т.е. настраивать автогенератор колебаний точно на резонансную частоту индуктора L1 , добиваясь Δt=0.
Такую настройку можно производить очень точно изменением сопротивления только одного элемента - резистора RфК, который может представлять собой постоянный резистор, подстроечный резистор, переменный резистор, набор дискретных прецизионных резисторов, переключаемых твердотельными ключами или реле или цифровой потенциометр с управлением от микроконтроллера (фиг.4, фиг.5).
Наиболее перспективным является использование цифрового потенциометра. В случае использования набора дискретных резисторов или цифрового потенциометра появляется возможность автоматической настройки устройства на резонансную частоту индуктора.
Для этого в схему автогенератора добавляется узел фазового детектора (ФД) и микроконтроллер (МК) (фиг.5).
Данная схема работает следующим образом.
Сигналы напряжения и тока поступают на соответствующие компараторы КОМП1, КОМП2, преобразующие синусоидальную форму сигнала в прямоугольную. Цепь из резисторов Rк1, Rк2 выравнивает крутизну сигналов напряжения и тока на входах компараторов для сохранения точности работы ФД.
Сигнал на выходе ФД пропорционален разности фаз сигналов напряжения и тока. Этот разностный сигнал поступает на МК, который в зависимости от величины разностного сигнала формирует на шине I2С (или другой цифровой шине) управляющий код для цифрового потенциометра (ЦП). ЦП перестаивается, изменяя постоянную времени цепи ПОСТ, до тех пор, пока сдвиг фаз не станет равным нулю, т.е. Δt=0.
Таким образом, образуется замкнутая петля автоматического регулирования, обеспечивающая точную настройку на резонансную частоту индуктора. Резистор RФК1 используется для предварительной установки ожидаемой фазокомпенсирующей задержки.
Резистор Rфк2 сужает диапазон регулировки RФК1. Вместе RФК1 и Rфк2 сужают диапазон регулировки ЦП.
Для проверки возможности осуществления изобретения в автогенераторной схеме по патенту №2714433, было изготовлено два макета устройств, реализующих заявленный СТУН, на основе переменного резистора и на основе ЦП.
Индуктор имел следующие параметры: внутренний диаметр обмотки- 25 мм; внешний диаметр обмотки 126 мм; диаметр провода обмотки 0,5 мм; количество двойных витков - 51; индуктивность одной обмотки (выводы 1-
2(3-4) L1, фиг.4, фиг.5) - 100 мкГн; емкость контура (выводы 1-4 L1, фиг.4,фиг.5) - 2300 пФ.
При используемых параметрах индуктора для обеспечения точной настройки элементы фазокомпенсирующей и других цепей имели следующие значения:
Для функциональной схемы автогенератора колебаний с фазокомпенсирующей цепью (фиг.4): R3 - 10 Ом -1% -0,1Вт; R4 - 1 Ом -1% -0,25Вт; Сфк - 0,022мкФ -5%- 16В; RФК -100 Ом - 1%-0,25Вт (сдвиг фаз 0 градусов обеспечивался при RФК =24 Ом).
Для функциональной схемы автогенератора колебаний с фазокомпенсирующей цепью и автоматической настройкой на резонансную частоту индуктора (фиг.5): R3 - 10 Ом -1% -0,1Вт; R4 - 1 Ом -1% -0,25Вт; Сфк - 0,022мкФ -5%- 16В; RФК1 -100 Ом - 1%-0,25Вт (сдвиг фаз 0 град обеспечивался при RФК1 =24 Ом); Rфк2 - 33 Ом-1%-0,1Вт; ЦП- (AD8400ARZ1) - 1 кОм; RК1 -12 кОм - 1%-0,1Вт; RК2 -1 кОм - 1%-0,1Вт.
Резонансная частота индуктора, как последовательного колебательного контура, определялась по известной формуле:
f=1/2π √L×C, где
L - индуктивность обмотки между выводами 1-2 (3-4) L1,
C - емкость контура между выводами 1-4 L1.
Отсюда,
f=1/2π √L×C=1/2×3,14√100×10-6×2300×10-12=332×103Гц=332кГц
Cдвиг фазы, обеспечиваемый дифференцирующей цепью, определялся по известной формуле:
Δϕ=π2-arctag2πƒτ
Δϕ(рад)=3,142-arctg2×3,14×332×103×(10+24)×0,022×10-6=0,57 рад.
Соответственно, исходный (без СТУН) сдвиг фазы в градусах составлял:
Δϕ(град)=3602π×Δϕ(рад)=3602×3,14×0,57=330
Такой сдвиг фазы, компенсируемый СТУН, говорит о наличии существенного исходного временного сдвига между напряжением на индукторе и током в индукторе и, как следствие, отсутствием точной настройки на резонансную частоту индуктора без СТУН.
Таким образом, заявленная совокупность существенных признаков обеспечивает достижение технического результата, который заключается в том, что предложенная СТУН в ПОСТ автогенератора колебаний позволяет эффективно осуществлять компенсацию фазового сдвига между напряжением на индукторе и током в индукторе и обеспечивать точную настройку на резонансную частоту индуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Генератор, управляемый напряжением | 2024 |
|
RU2837586C1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО ВОЗДЕЙСТВИЯ НА ЖИВЫЕ ОРГАНИЗМЫ | 2019 |
|
RU2714433C1 |
| ЭЛЕКТРОННЫЙ ХОМУС | 2012 |
|
RU2498418C2 |
| ПОЛУМОСТОВОЙ АВТОГЕНЕРАТОР | 1997 |
|
RU2141717C1 |
| Устройство ввода энергии в газоразрядную плазму | 2018 |
|
RU2695541C1 |
| СВЕРХРЕГЕНЕРАТИВНЫЙ ПРИЕМОПЕРЕДАТЧИК | 2004 |
|
RU2291467C2 |
| Устройство для измерения магнитной восприимчивости | 1980 |
|
SU907485A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА | 2016 |
|
RU2665753C2 |
| АВТОГЕНЕРАТОР МАГНИТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ВИБРАЦИОННОГО ГИРОСКОПА И СПОСОБ БАЛАНСИРОВКИ АВТОГЕНЕРАТОРА | 2007 |
|
RU2359401C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ ИЛИ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047097C1 |
Изобретение относится к медицинской технике, к устройствам для магнитного воздействия на живые организмы, в которых индуктор включен как нагрузка автогенератора колебаний. Точную настройку на резонансную частоту индуктора осуществляют за счет того, что в цепь положительной обратной связи по току автогенератора колебаний включают опережающую дифференцирующую фазокомпенсирующую цепь, которую выполняют в виде последовательно соединённых конденсатора и резистора. При этом точную настройку осуществляют путем изменения сопротивления резистора, который может представлять собой постоянный резистор, подстроечный резистор, переменный резистор, набор дискретных прецизионных резисторов, переключаемых твердотельными ключами или реле, или цифровой потенциометр с управлением от микроконтроллера. Способ позволяет эффективно осуществлять компенсацию фазового сдвига между напряжением на индукторе и током в индукторе и обеспечивать точную настройку на резонансную частоту индуктора. 4 з.п. ф-лы, 5 ил.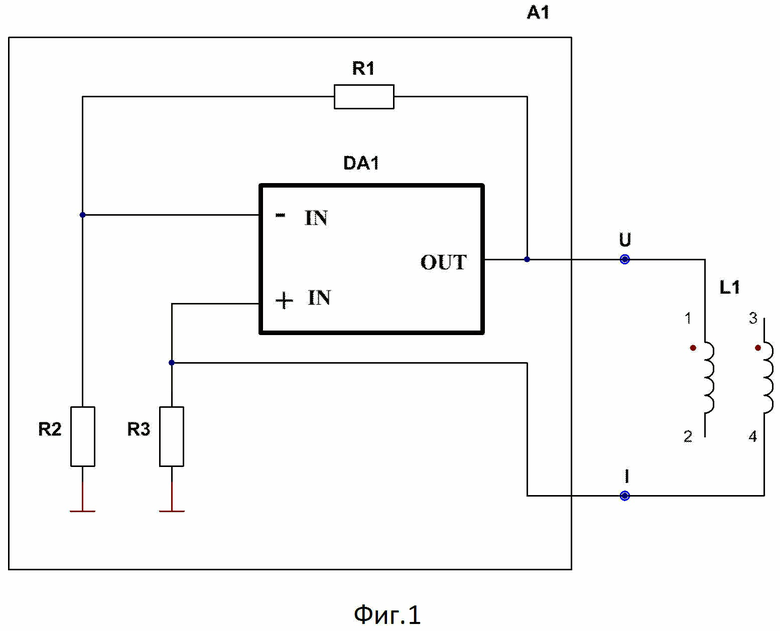
1. Способ точной настройки на резонансную частоту индуктора устройства для магнитного воздействия на живые организмы, которое включает источник питания, автогенератор колебаний с нагрузкой в виде индуктора, включенного в цепь положительной обратной связи по току автогенератора колебаний, отличающийся тем, что в цепь положительной обратной связи по току автогенератора колебаний включают опережающую дифференцирующую фазокомпенсирующую цепь, которую выполняют в виде последовательно соединённых конденсатора и резистора, при этом точную настройку на резонансную частоту индуктора осуществляют путем изменения сопротивления резистора.
2. Способ по п.1, отличающийся тем, что резистор выполняют в виде резистора заранее подобранного постоянного сопротивления.
3. Способ по п.1, отличающийся тем, что резистор выполняют в виде резистора подстроечного или переменного сопротивления, управляемого вручную.
4. Способ по п.1, отличающийся тем, что резистор выполняют в виде набора дискретных прецизионных резисторов, переключаемых электронными ключами.
5. Способ по п.1, отличающийся тем, что резистор выполняют в виде цифрового потенциометра, сопротивлением которого по цифровой шине управляет микроконтроллер, на вход которого подают сигнал рассогласования фаз от фазового детектора, входы которого соединяют с выходами компараторов, на входы которых подают сигналы соответственно напряжения на индукторе и тока в индукторе.
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО ВОЗДЕЙСТВИЯ НА ЖИВЫЕ ОРГАНИЗМЫ | 2019 |
|
RU2714433C1 |
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 1992 |
|
RU2034579C1 |
| СИСТЕМА БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2009 |
|
RU2506678C2 |

