ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение состоит из автономного грузовика для взрывных работ, предназначенного для облегчения процесса подрыва уступов рудников.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[002] Взрывные работы по породе являются ключевым этапом при подготовке рудника, и их назначением является ослабление, фрагментация и обеспечения доступа к руде для последующих фаз транспортировки и обработки материала.
[003] План взрывных работ по породе, определяющий схему взрывных работ, изменяется в зависимости от литологического состава породы, с который надлежит работать, и геометрических свойств насыпи из скалистой породы, и местных географических условий. Также необходимо принимать в расчет климатические условия и присутствие либо отсутствие воды в подрываемых выемках. Плохо продуманный план взрывных работ по породе может привести к дроблении руды, отрицательным воздействиям на окружающую среду или к ухудшению уровня безопасности при подрывных операциях.
[004] После завершения подготовки плана взрывных работ по породе, в верхней поверхности выемки выполняются скважины. Как правило, эти скважины выполняются с помощью буровых машин, таких как, например, машина, показанная в US8899350 (Caterpillar Inc.).
[005] После выполнения скважин, в них помещается взрывчатое вещество. После этого, остальная скважина заполняется землей для того, чтобы закрыть взрывчатый заряд (при работе также называется «буферизация»).
[006] В настоящее время, наиболее распространенной является закладка взрывчатых веществ вручную, содержащая следующие этапы:
[007] Этап 1 - подготовка и транспортировка материалов к области взрыва. Оператор начинает анализ всей сетки путем измерения глубины скважины с помощью ленты, а также анализ присутствия воды в скважине путем проверки звука, исходящего из нее, когда лента касается дна пробуренной скважины.
[008] Этап 2 - выгрузка мешков со взрывчатым веществом с грузовика.
[009] Этап 3 - закладка первой части взрывчатого вещества в скважину до тех пор, пока оно не заполнит примерно 8% ее глубины (примерно 1 метр в высоту).
[010] Этап 4 - сборка детонатора, которая заключается в разматывании детонационного шнура и креплении конца детонационного шнура, содержащего запал (металлический наконечник этого объекта) в элементе, называемом бустером.
[011] Этап 5 - закладка комплекта, собранного на этапе 4, в скважину, оставляя другой конец детонационного шнура снаружи скважины.
[012] Этап 6 - закладка остального взрывчатого вещества в скважину, в соответствии с планируемой высотой для заряда.
[013] Этап 7 - буферизация, заключающаяся в заполнении скважины до конца землей, находящейся вокруг скважины.
[014] Ручной процесс закладки взрывчатых веществ имеет множество недостатков, таких как: подвергание рабочих критическим эргономическим условиям; подвергание рабочих высокому риску при работах в зоне взрыва; а также, ошибки в исполнении по причине человеческого фактора.
[015] В предшествующем уровне техники существуют некоторые технологии, раскрывающие полуавтоматические автомобили, предназначенные для закладки взрывчатых веществ в шурповые скважины. Однако, ни одна из этих технологий не является полностью независимой от человеческого фактора, а также не демонстрирует приемлемых уровней эффективности, качества и предсказуемости результатов.
[016] Например, в документе US8950330 показан грузовик, предназначенный для закладки взрывчатых веществ в детонационные скважины. Грузовик содержит бак, перемешивающий экскаватор, подающую трубу и систему управления. Бак выполнен с возможностью хранения взрывчатого материала в ходе транспортировки и загрузки в детонационную скважину, и подающая труба позволяет поместить его свободный конец над детонационной скважиной, что позволяет помещать взрывчатый материал в детонационную скважину после того, как он пройдет по подающей трубе.
[017] Грузовик, показанный в US8950330, содержит орган управления для манипулирования подающей трубой, расположенный внутри кабины автомобиля. Тем не менее, несмотря на наличие устройства управления подающей трубой, упомянутое устройство приводится в действие с помощью интерфейса пользователя, а не автоматически. Несмотря на то, что система, показанная в US8950330 обеспечивает некоторое расстояние между оператором и взрывчатым зарядом, это расстояние абсолютно неэффективно в ситуации взрыва, например. Даже если оператор может управлять всем, находясь в кабине грузовика, существует угроза случайного подрыва взрывчатого заряда.
[018] В документе WO2010144952 показан пример грузовика для загрузки взрывчатых веществ, оборудованного GPS (Глобальной Системой Навигации), которая позволяет грузовику автоматически заполнять скважины, содержащиеся в выемке, как требуется для заполнения каждой из этих скважин.
[019] В указанном грузовике хранится информация, такая как географическое положение скважин (продольное и поперечное), глубина и диаметр каждой скважины, и уровень воды, обнаруженный в каждой из скважин. Эта информация сравнивается в реальными данными, полученными в результате проведения измерений техниками и инженерами, находящимися на отвале породы до осуществления этапа заполнения скважин. Эта информация направляется на устройства в грузовике посредством беспроводного канала связи.
[020] Основной проблемой технологии, описанной в WO2010144952 является тот факт, что грузовик, показанный в этом документе, требует человеческого вмешательства на разных этапах работы, например, во время ввода детонатора в скважину и в течение ввода данных в грузовик.
[021] В документе WO2014063188 показан грузовик для загрузки в скважины на уступе в открытых выработках. Грузовик оснащен навигационной системой GPS и содержит зонд, предназначенный для выполнения измерения в реальном времени внутренних свойств скважины. Зонд, выполненный в соответствии с технологией, описанной в WO2014063188, предпочтительно располагается на вершине трубы для доставки взрывчатого вещества, в таком положении, чтобы обеспечивать ему визуальный доступ к дну скважины.
[022] Главной проблемой WO2014063188 является то, что он не предусматривает автоматических манипуляционных приспособлений, способных воспроизвести все действия, выполняемые оператором при закладке взрывчатых веществ.
[023] Таким образом, можно заключить, что как технология закладывания взрывчатых веществ вручную, так и полуавтоматическая технология, представленные в предшествующем уровне техники, не способны обеспечить способ или оборудование для закладки взрывчатых веществ, при помощи которых можно воспроизвести все действия, выполняемые оператором вручную при закладке взрывчатых веществ, абсолютно свободно от какого-либо человеческого вмешательства.
ЗАДАЧИ ИЗОБРЕТЕНИЯ
[024] Задачей настоящего изобретения является создание автомобиля, предназначенного для закладки взрывчатых веществ в скважины в открытых выработках, при этом автомобиль имеет такую конфигурацию, чтобы выполнять все семь этапов, осуществляемые в процессе ручной закладки взрывчатых веществ, автоматически, полностью свободно от человеческого вмешательства.
[025] Задачей настоящего изобретения также является создание способа использования вышеупомянутого автомобиля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[026] Настоящее изобретение будет описано подробно на основании соответствующих чертежей:
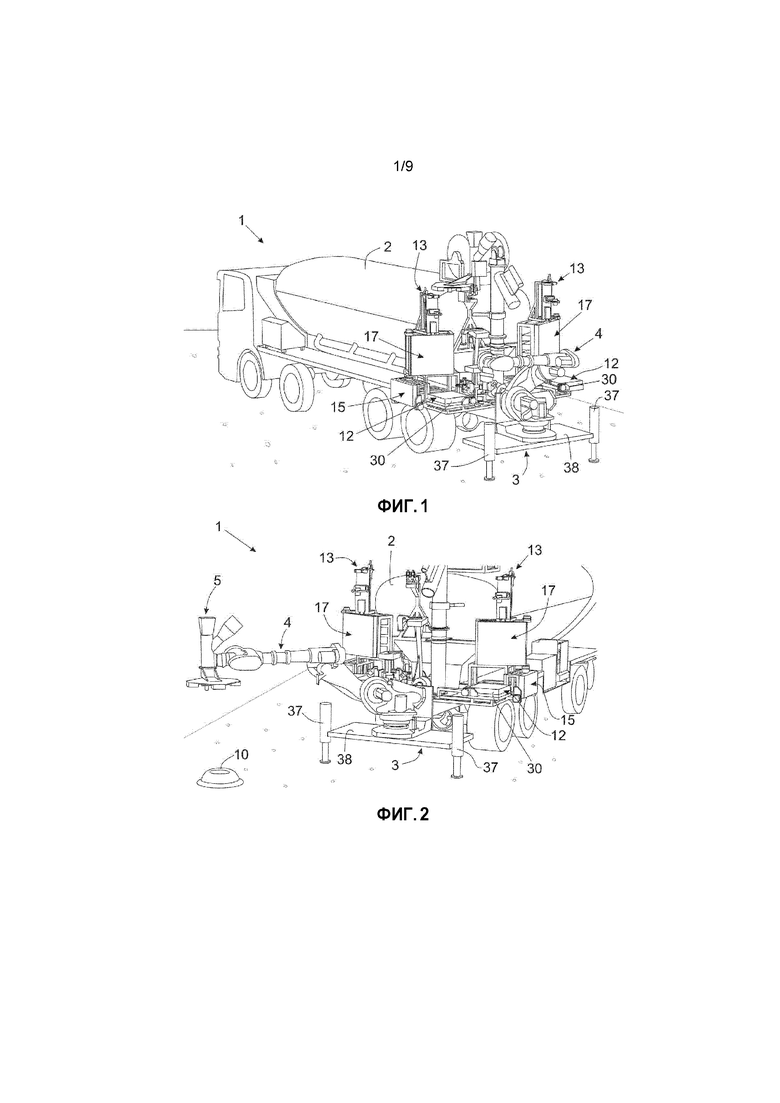
[027] Фигура 1 - вид сверху в перспективе автомобиля в соответствии с изобретением.
[028] Фигура 2 - вид сзади в перспективе автомобиля в соответствии с изобретением.
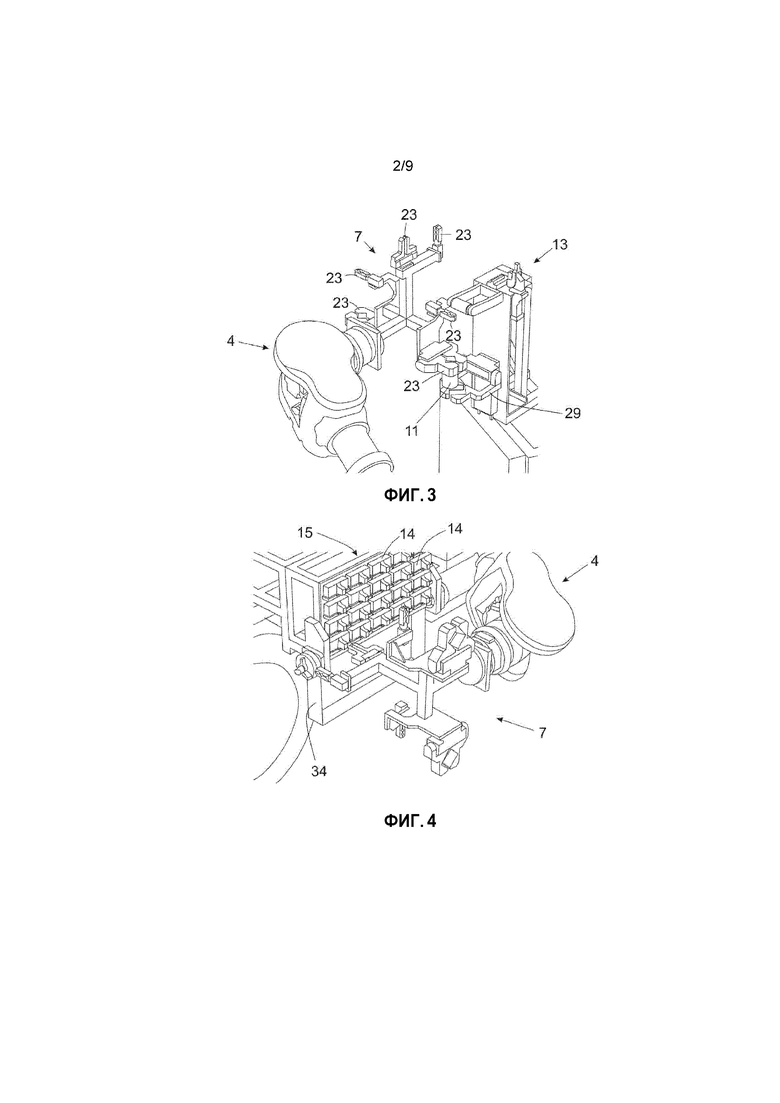
[029] Фигура 3 - вид сверху свободного конца механического манипулятора, присоединенного ко второму захвату, около сборочного устройства.
[030] Фигура 4 - вид сверху в перспективе механического манипулятора, присоединенного ко второму захвату, перед хранилищем весов автомобиля в соответствии с изобретением.
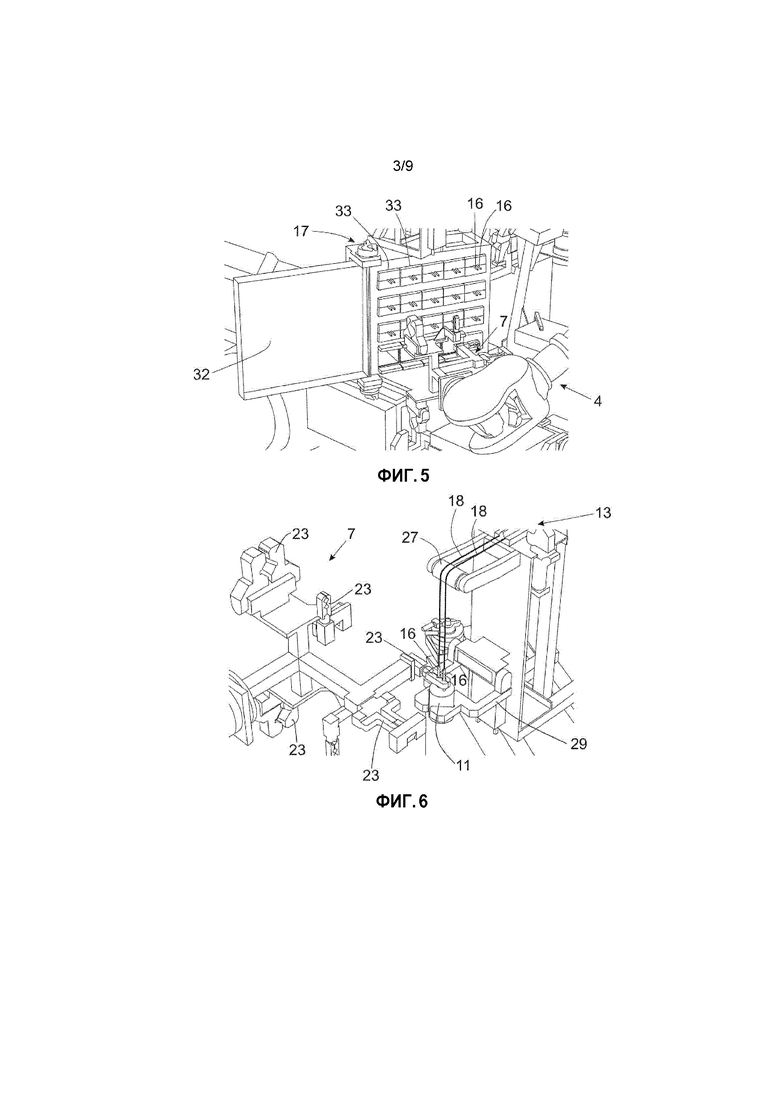
[031] Фигура 5 - вид сверху в перспективе механического манипулятора, присоединенного ко второму захвату, перед хранилищем запалов и детонационных шнуров автомобиля в соответствии с изобретением.
[032] Фигура 6 - вид сверху в перспективе второго захвата, осуществляющего процесс ввода запалов в бустер.
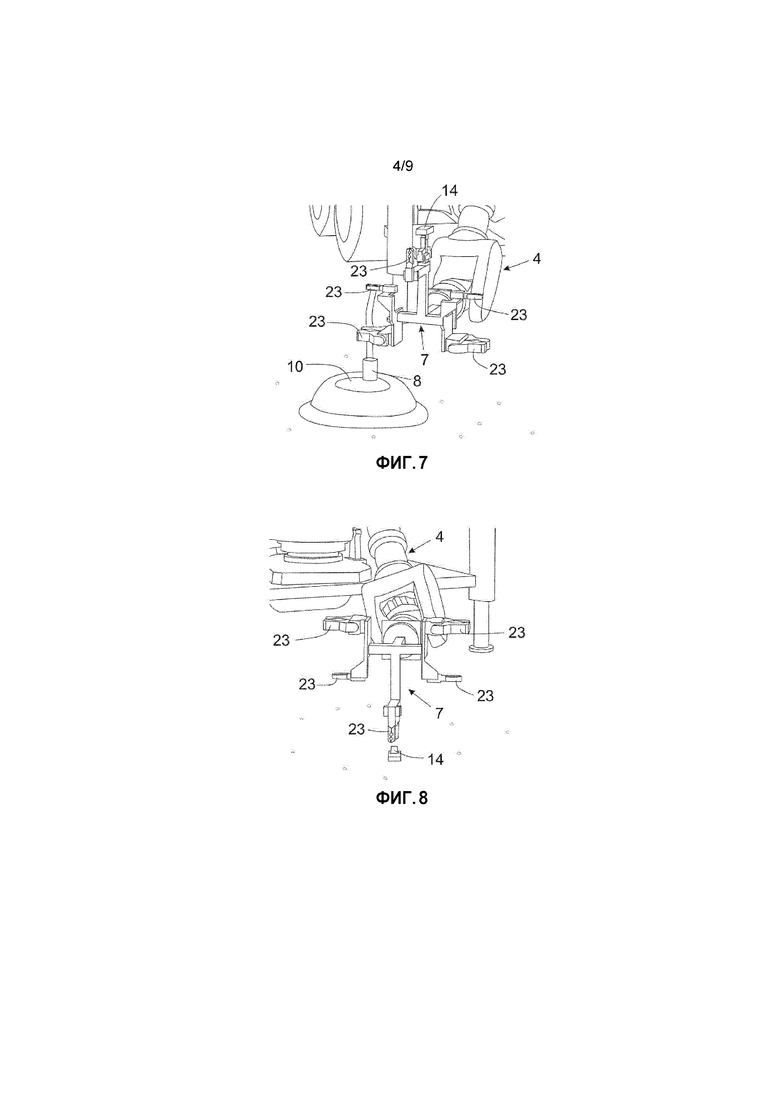
[033] Фигура 7 - вид спереди второго захвата, опускающего бустер во взрывную скважину.
[034] Фигура 8 - вид спереди второго захвата, освобождающего крепежный вес детонационного шнура около взрывной скважины.
[035] Фигура 9 - вид спереди первого захвата, соединенного со свободным концом механического манипулятора изобретения.
[036] Фигура 10 - вид в перспективе третьего захвата, осуществляющего процесс буферизации взрывной скважины.
[037] Фигура 11 - операционная блок-схема метода в соответствии с изобретением.
[038] Фигура 12 - вид сбоку первого захвата в соответствии с изобретением.
[039] Фигура 13 - вид сверху в перспективе второго захвата.
[040] Фигура 14 - вид спереди третьего захвата.
[041] Фигура 15 - вид спереди сборочного устройства.
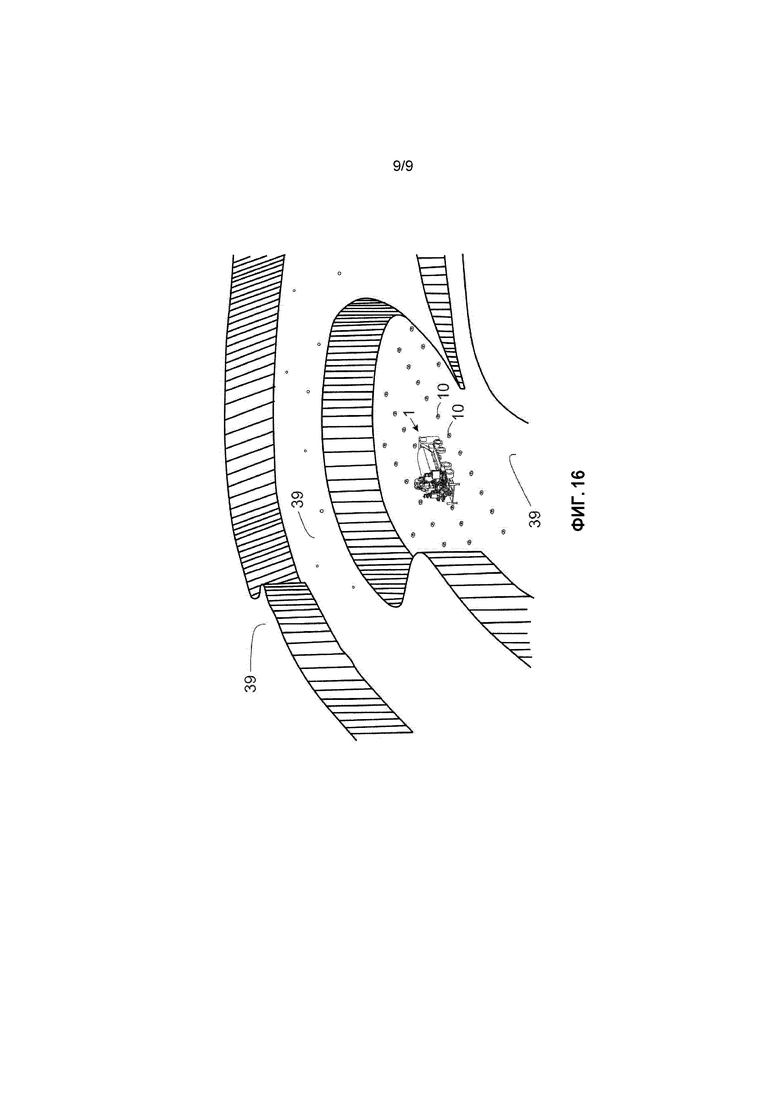
[042] Фигура 16 - вид сверху в перспективе автомобиля в соответствии с изобретением, перемещающегося по уступу открытой выработки.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[043] Как показано на фигурах 1 и 2, настоящее изобретение состоит из автомобиля 1, предназначенного для полной автоматизации операций по закладке взрывчатых веществ, предшествующих подрыву уступов 39 в открытом руднике.
[044] Грузовик, показанный на фигурах 1 и 2, называемый далее автомобилем 1, оборудован по меньшей мере одним GPS устройством, высокоточной системой определения геологического местоположения, и электронным процессором для автономной ориентации автомобиля, и двигательной установкой. Эти устройства позволяют автомобилю 1 перемещаться независимо, т.е., без какого-либо человеческого вмешательства на верхней поверхности уступа 39 рудника.
[045] При помощи GPS устройства (не показано на чертежах), указанной системы определения геологического местоположения и геолокации (географических координат) скважин 10, автомобиль 1 может самостоятельно направляться к каждой из скважин 10 рудника, которые надлежит взорвать. Следует отметить, что автомобили с автономным приводом не являются новшеством в данной области техники, и представлены, например, в US6272405, US6996462 и DE102009010006. На основании указанных примеров предшествующего уровня техники, специалист в данной области техники при помощи GPS устройства, высокоточной системой определения географического местоположения и электронного процессора может запрограммировать автомобиль 1 так, чтобы он автономно перемещался по уступу 39.
[046] После достижения заданной скважины 10, автомобиль 1 располагается так, чтобы свободной конец его механического манипулятора 4 находился в пределах доступа к скважине 10. После этого начинается процедура закладки взрывчатого вещества.
[047] Информацией, требуемой для автомобиля 1, является информация о плане подрыва горной породы и географические координаты скважин 10. На основании этой информации, автомобиль 1 может оценить количество взрывчатых веществ, которое необходимо заложить в каждую скважину 10, и необходимые главные вспомогательные материалы для каждой из них.
[048] После приближения к скважине 10, автомобиль 1 может повторно рассчитать количество взрывчатых веществ и основных вспомогательных материалов для каждой из скважин 10, на основании изменений глубины скважины 10 (по причине случайного обрушения грунта), при помощи присутствия воды, или при помощи свидетельства о трещинах и присутствия ломкого материала внутри скважины 10. Если внутри скважины 10 есть вода, автомобиль 1 автоматически определяет замену игданита на эмульсию (взрывчатое вещество, нерастворимое в воде). Если внутри скважины присутствует твердый материал, автомобиль 1 определяет ввод взрывчатого вещества высокой плотности.
[049] Все изменения, обнаруженные в скважинах 10, а также решения, принятые автомобилем 1 по обходу этих изменений, записываются в электронной памяти или доступны в режиме реального времени на удаленном мониторе.
[050] Автомобиль 1 содержит бак 2 для хранения взрывчатых веществ, вертикально перемещающуюся платформу 3 и механический манипулятор 4.
[051] В предпочтительной конфигурации, автомобиль 1 также содержит: три захвата, выполненные с возможностью зацепления со свободным концом механического манипулятора 4, каждый из которых наделен особой функцией и задачей. Это первый захват 5, второй захват 7 и третий захват 19.
[052] Первый захват 5 предназначен для манипуляций со шлангами для игданита и эмульсии, для ориентации зонда, для вмещения системы наблюдения 36.
[053] Второй захват 7 предназначен для манипулирования бустерами 11, детонационными шнурами 18 и запалами 16, и весами 14.
[054] Третий захват 19 предназначен для буферизации скважины 10 в конце процесса закладки взрывчатых веществ.
[055] Предпочтительно, автомобиль 1 также содержит хранилище 12 бустеров, хранилище 15 весов и хранилище 17 запалов и детонационных шнуров, и сборочное устройство 13. Три указанных хранилища 12, 15, 17 несут функцию по хранению бустеров 11, весов 14 и детонационных шнуров 17, то есть, элементов, необходимых для создания детонатора 8. Четвертый элемент, сборочное устройство 13, выполняет функцию способствования процессу сборки указанного детонатора 13.
[056] В соответствии с Требования Армии Бразилии по Проверке Контролируемых Продуктов (R-105), взрывчатые материалы и запальные устройства не могут транспортироваться вместе, поэтому, детонатор 8 должен быть установлен в момент его помещения в скважину 10.
[057] Бак 2 для хранения взрывчатых веществ предпочтительно оснащен по меньшей мере двумя изолированными отделениями: одно для игданита (для закладки в сухие скважины 10), и одно для эмульсий (для закладки в скважины 10 с водой). Альтернативно, бак 2 может содержать третье внутреннее отделение, предназначенное для хранения взрывчатых веществ высокой плотности для подрыва твердых пород.
[058] Вертикально перемещающаяся платформа 3 выполняет функцию по определению уровня механического манипулятора 4 относительно земли 4 (это необходимо, поскольку верхняя поверхность уступов 39 рудника, как правило, довольно ухабистая), и по обеспечению идеальной рабочей высоты для механического манипулятора 4. Для выполнения этой функции, вертикально перемещающаяся платформа 3 содержит по меньшей мере два (гидравлических или пневматических) поршня 37, расположенных под металлической пластиной 38 (см. фигуры 1 и 2).
[059] Схема работы автомобиля 1 представлена ниже:
Этап 1 - автомобиль 1 останавливается около скважины 10.
Этап 2 - механический манипулятор 4 зацепляется с первым захватом 5 и выполняет планирование скважины 10 с помощью системы наблюдения 36, которая содержится в первом захвате 5. Это планирование, в основном, выполняется для определения точного местоположения центра скважины 10.
Этап 3 - механический манипулятор 4 проверяет глубину и присутствие воды внутри скважины 10 путем ввода в нее зонда.
Этап 4 - закладка первой части взрывчатого вещества (до тех пор, пока оно не заполнит примерно 1 метр колонны от дна скважины).
Этап 5 - механический манипулятор 4 отсоединяется от первого захвата 5 и соединяется со вторым захватом 7, предназначенным для манипулирования детонатором 8.
Этап 6 - механический манипулятор 4 собирает детонатор 8 (сборка бустера 11+запалы 16+детонационные шнуры 18+вес 14).
Этап 7 - механический манипулятор 4 вводит детонатор 8 в скважину 10 с постоянной скоростью (см. фигуру 7).
Этап 8 - механический манипулятор 4 сбрасывает вес 14 на землю, около кромки скважины 10, для крепления свободного конца детонационного шнура 18 в месте, удаленном от отверстия 10 скважины 10 (см. фигуру 8).
Этап 9 - механический манипулятор 4 заменяет второй захват 7 на первый захват 5.
Этап 10 - завершение закладки взрывчатого вещества в скважину 10.
Этап 11 - механический манипулятор 4 заменяет первый захват 5 на третий захват 19.
Этап 12 - механический манипулятор 4 выполняет буферизацию (ввод земли в верхний участок скважины) с помощью третьего захвата 19 (см. фигуру 10).
Этап 13 - механический манипулятор 4 возвращается в исходное положение и освобождает автомобиль 1 для перемещения.
[060] На этапе 6, описанном выше, сборка детонатора 8 может быть разделена на шесть разных под этапов, а именно: этап 6А - забор бустера 11 из его хранилища 12 и его транспортировка к сборочному устройству 13 (см. фигуру 3); этап 6В - забор веса 14 из хранилища 15 весов (см. фигуру 4); этап 6С - забор пары запалов 16 из хранилища 17 для запалов и детонационных шнуров, и подъем этих элементов для способствования разматыванию детонационных шнуров 18 (см. фигуру 5); этап 6D - проведение детонационных шнуров 18 через сборочное устройство 13 так, чтобы обеспечить возможность последующего ввода запалов 16 через отверстия 11 бустера; этап 6Е - подъем линейного цилиндра 28 так, чтобы запалы 16 были доступны в нижней части бустера 11 (см. фигуру 6); и этап 6F - механический манипулятор 4 поворачивает запалы 16 так, чтобы выполнить петлю, и обеспечивает возможность их повторного ввода в бустер 11.
[061] После ввода детонатора 8, собранного при помощи этапов, указанных выше, вес 14 помещается на детонационный шнур 18 на поверхности открытого рудника, это представляет этап 8.
[062] Некоторые признаки каждого из захватов 5, 7 и 19 и сборочного устройства 13, содержащегося в автомобиле 1, представлены ниже.
Первый захват 5
[063] Это захват предназначен для манипуляций с игданитом и шлангами для эмульсии, для манипулирования зондом и системой управления 36.
[064] Первая щека имеет Y-образное соединение 35 для того, чтобы свести два входа для взрывчатых веществ в единый выход. Следует отметить, что вход 20 для игданита и вход 21 для шланга с эмульсией сужаются в единый выход 22, расположенный на дистальном конце первой щеки 5 (см. фигуру 12).
[065] Для закладки взрывчатой массы, шланг, содержащийся внутрь первого захвата 5, проходит до дна скважины 10, и лишь когда его свободный конец достигает дна скважины 10, начинается выброс эмульсии, что предотвращает потерю эффективности взрывчатой массы при детонации из-за загрязнения буровой пылью, выброшенной и осажденной на вороте скважины 10 в ходе бурения.
[066] Система наблюдения 36, также расположенная в захвате 5, предназначена для точного определения центра скважины 10, так, чтобы захват 5 мог четко работать в скважине 10.
[067] Система наблюдения 36 состоит из устройства для выполнения в некотором роде сканирования ворота скважины 10 при помощи лазерных датчиков, что позволяет точно определить центр скважины 10 на поверхности.
[068] Первый захват 5 также содержит зонд. Указанный зонд оборудован по меньшей мере одним датчиком и удерживающим кабелем (не показан на чертежах). До начала закладки взрывчатых веществ в скважину 10, зонд вводится в скважину 10 для вычисления действительной ее глубины, и для определения присутствия воды в скважине 10. Альтернативно, зонд может также определять другие признаки скважины 10, такие как: присутствие ломкого или твердого материала; присутствие карманов (пустых пространств вокруг скважины); и наличие трещин во внутренней стенке скважины 10.
[069] Зонд будет оборудован по меньшей мере одни декодером, установленным в обмотки кабеля датчика, для измерения действительной глубины скважины 10; и датчиком для определения жидкостей для проверки на предмет присутствия воды. Альтернативно, зонд может состоять из ультразвуковых, лазерных, или Гамма-ГТ датчиков для анализа литологического профиля, трещин и/или карманов (пустых областей).
[070] Второй захват 7
[071] Второй захват 7 используется для облегчения сборки детонатора 8.
[072] Предпочтительно, второй захват 7 содержит четыре типа зажимов 23, как показано на фигурах 3, 8 и 13. Каждая из моделей зажимов 23 используется для манипулирования заданным объектом (весами 14, запалами 16, детонационными шнурами 18 и бустерами 11).
[073] Второй захват 7 имеет симметричную конструкцию, которая повторяет две модели зажимов 23 с каждой стороны второго захвата 7, что обеспечивает механическому манипулятору 4 доступ с обеих сторон автомобиля 1 (на фигурах 7 и 8 можно ясно увидеть указанную симметрию второго захвата 7).
[074] Третий захват 19
[075] Основной функцией третьего захвата 19 является манипулирование количеством земли, присутствующей вокруг скважины 10.
[076] Третий захват 19 содержит конец 24 в форме лопаты, функцией которого является обеспечение возможности манипуляций с землей в ходе процесса буферизации скважины 10 (см. фигуры 10 и 14).
[077] Сборочное устройство 13.
[078] Сборочное устройство 13 используется для облегчения механическому манипулятору обращения с элементами, составляющими детонатор 8 (веса 14, запалы 16, детонационные шнуры 18 и бустеры 11).
[079] Сборочное устройство 13 содержит: трубчатый разделитель 25; трубчатый тормозной хомут 26; выравнивающий ролик 27; линейный цилиндр 28; и держатель 29 бустера, расположенные, как показано на фигуре 15.
[080] Подача на сборочное устройство 13 осуществляется механическим манипулятором 4 для сборки детонатора, как описано на этапе 6. Держатель 29 бустера поддерживает бустер 11 с выровненными отверстиями; трубный разделитель 25 и выравнивающий ролик 27 обеспечивают зажатие, натяжение и параллелизм детонационных шнуров 18. После того, как второй захват 7 помещает запалы 16 в верхние отверстия бустера 11 (этапы 6D и 6Е), он освобождает запалы 16, и линейный цилиндр 28 выполняет вертикальное перемещение, вновь открывая пару запалов 16 в нижней части бустера 11, что позволяет второму захвату 7 вновь манипулировать парой проводов 16 так, чтобы поместить их в противоположные отверстия, завершая сборку детонатора 8. Трубный зажим 26 поддерживает детонационный шнур 18 в заблокированном состоянии, и он ослабляется в ходе ввода детонатора 8 в скважину 10 на этапе 7.
[081] Некоторые признаки каждого из хранилищ 12, 15 и 17, содержащихся в автомобиле 1, описаны ниже.
[082] Хранилище 12 бустеров.
[083] Предпочтительно, хранилище 12 бустеров содержит пневматическую крышку 30, защитный экран, предотвращающий вибрацию и контакт между бустерами 12, и локаторы с фиксированными положениями в хранилище для обеспечения корректной подачи операторами (хранилище 12 бустеров показано в состоянии, когда крышка 30 закрыта на фигурах 1 и 2 настоящего описания).
[084] Помимо прочих типов бустеров 11, хранилище 12 бустеров выполнено с возможностью хранения бустеров массой 900, 450 или 250 грамм.
[085] Хранилище 17 запалов и детонационных шнуров
[086] Главной функцией хранилища 17 запалов и детонационных шнуров является обеспечение пары запалов 16 и детонационных шнуров 18 для механического манипулятора 4 и обеспечение безопасной транспортировки этих элементов.
[087] Хранилище 17 запалов и детонационных шнуров содержит пневматическую крышку 32, предназначенную для изоляции запалов 16 от окружающей среды, и набор штоков 33, каждый из которых имеет два детонационных шнура 18 и их соответствующие запалы 16.
[088] Каждый шток 33 содержит пару створок на пружинных петлях, обеспеченных пазами для размещения запалов 16. Такая система облегчает доставку запалов 16 к механическому манипулятору 4.
[089] Среди прочих запалов 16, данное хранилище совместимо с запалами 16 типа Exel.
[090] Хранилище 15 весов.
[091] Функцией хранилища 15 весов является обеспечение весов 14 для механического манипулятора 4, и обеспечение безопасной транспортировки этих элементов.
[092] Предпочтительно, хранилище 15 весов содержит пневматическую крышку 34 и локаторы, предназначенные для обеспечения размещения и корректной подачи операторами (см. фигуру 4).
[093] После приведенного описания некоторых примеров предпочтительного воплощения изобретения, следует отметить, что пределы защиты, обеспечиваемые настоящим документом, включают в себя все альтернативные формы исполнения изобретения, что определено и ограничено только содержанием прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ПЕРФОРАТОР И СПОСОБ ЕГО ВЗВЕДЕНИЯ | 2012 |
|
RU2571108C2 |
| Состав взрывчатого вещества для промежуточных детонаторов и способ изготовления этого взрывчатого вещества | 2019 |
|
RU2728031C1 |
| Промежуточный детонатор | 2023 |
|
RU2814403C1 |
| СПОСОБ ЗАРЯЖАНИЯ И ВЗРЫВАНИЯ СКВАЖИН | 1994 |
|
RU2064658C1 |
| Смесительно-зарядная машина для роботизированной технологии создания скважинных зарядов с переменной энергетической насыщенностью и способы формирования детонационных систем на их основе | 2019 |
|
RU2789093C2 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ВЗРЫВЧАТОЙ СМЕСИ НА МЕСТЕ ПРОВЕДЕНИЯ ВЗРЫВНЫХ РАБОТ | 2003 |
|
RU2267475C2 |
| АППАРАТ, СИСТЕМА И СПОСОБ | 2015 |
|
RU2697980C2 |
| Способ взрывной отбойки горных пород и скважинный заряд для его осуществления | 2021 |
|
RU2766994C1 |
| ОБЪЕДИНЕННЫЕ ДЕТОНАТОРЫ ДЛЯ ИСПОЛЬЗОВАНИЯ СО ВЗРЫВНЫМИ УСТРОЙСТВАМИ | 2005 |
|
RU2295694C2 |
| КУМУЛЯТИВНЫЙ СЕКЦИОННЫЙ ПЕРФОРАТОР ДЛЯ СКВАЖИНЫ | 2012 |
|
RU2492315C1 |
Изобретение раскрывает конструкцию автономного грузовика для взрывных работ и способ его применения. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) содержит бак (2) для хранения взрывчатого вещества, вертикально перемещающуюся платформу (3) и механический манипулятор (4). Бак (2) для хранения взрывчатого вещества оборудован по меньшей мере одним воздухонепроницаемым контейнером, выполненным с возможностью хранения взрывчатого вещества в жидкой или гранулированной форме. Вертикально перемещающаяся платформа (3) выполнена с возможностью размещения механического манипулятора (4) на идеальной рабочей высоте относительно земли, и выравнивания механического манипулятора (4) для компенсации неровности почвы. Механический манипулятор (4) содержит по меньшей мере две оси перемещения, зажим и датчик. Механический манипулятор (4) предназначен для обеспечения возможности выполнения анализа внутри скважины (10), направляя датчик около верхней кромки скважины (10), направления первой порции взрывчатого вещества, сборки детонатора, закладки собранного детонатора в скважину (10), направления второй порции взрывчатого вещества в скважину (10) и буферизации скважины (10) в конце процесса. Автомобиль (1) также содержит устройство GPS, средства передвижения и электронный процессор, выполненные с возможностью независимого направления автомобиля (1). Изобретение позволяет осуществлять все этапы закладки автоматически, полностью без человеческого вмешательства. 2 н. и 16 з.п. ф-лы, 16 ил.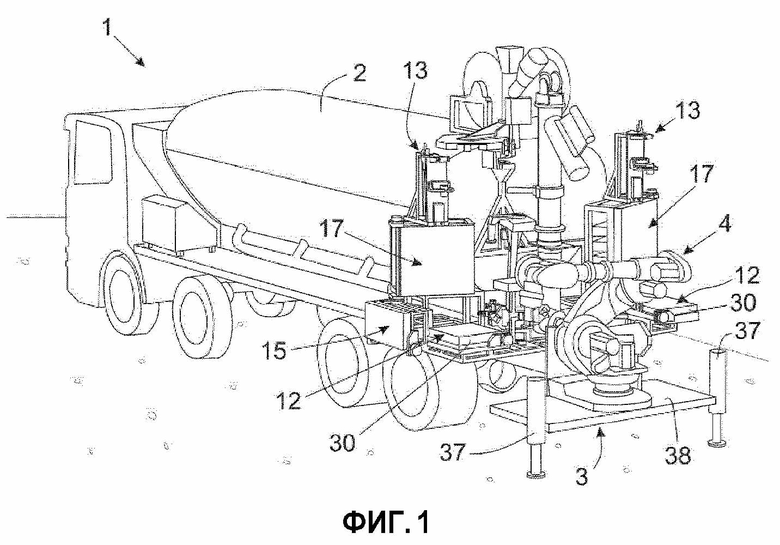
1. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10), отличающийся тем, что он содержит:
- бак (2) для хранения взрывчатого вещества;
- вертикально перемещающуюся платформу (3); и
- механический манипулятор (4); при этом
бак (2) для хранения взрывчатого вещества оборудован по меньшей мере одним воздухонепроницаемым контейнером, выполненным с возможностью хранения взрывчатого вещества в жидкой или гранулированной форме;
вертикально перемещающаяся платформа (3) выполнена с возможностью размещения механического манипулятора (4) на идеальной рабочей высоте относительно земли, и выравнивания механического манипулятора (4) для компенсации неровности почвы;
механический манипулятор (4) содержит по меньшей мере две оси перемещения, зажим (23) и датчик, при этом механический манипулятор (4) предназначен для:
- обеспечения возможности выполнения анализа внутри скважины (10), направляя датчик около верхней кромки скважины (10);
- направления первой порции взрывчатого вещества;
- сборки детонатора (8);
- закладки собранного детонатора (8) в скважину (10);
- направления второй порции взрывчатого вещества в скважину (10); и
- буферизации скважины (10) в конце процесса; при этом
автомобиль (1) также содержит: устройство GPS, средства передвижения и электронный процессор, выполненные с возможностью независимого направления автомобиля (1).
2. Автомобиль (1) для закладки взрывчатых веществ во взрывные отверстия (10) по п.1, отличающийся тем, что механический манипулятор (4) содержит четыре оси перемещения.
3. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что он содержит по меньшей мере три захвата (5, 7, 19), выполненные с возможностью зацепления со свободным концом механического манипулятора (4), причем каждый из этих захватов (5, 7, 19) имеет разную функцию и назначение.
4. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.3, отличающийся тем, что он содержит первый захват (5), выполненный с возможностью манипуляций с игданитом и шлангами для эмульсии.
5. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.4, отличающийся тем, что он содержит первый захват (5), выполненный с возможностью измерения глубины скважины (10) и определения наличия воды внутри скважины (10).
6. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.4, отличающийся тем, что первый захват (5) содержит систему наблюдения (36), выполненную с возможностью определения центра скважины (10).
7. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.3, отличающийся тем, что он содержит второй захват (7), выполненный с возможностью сборки детонаторов (8) при помощи выполнения манипуляций с бустерами (11), детонационными шнурами (18), запалами (16) и весами (14).
8. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.7, отличающийся тем, что второй захват (7) содержит по меньшей мере четыре разных типа зажимов (23), каждый из которых выполнен с возможностью манипуляции одним из элементов, составляющих детонатор (8).
9. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.3, отличающийся тем, что он содержит третий захват (19), выполненный с возможностью буферизации скважины (10) в конце процесса закладки взрывчатых веществ, при этом третий захват (19) оснащен концом, имеющим конфигурацию лопаты (24).
10. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что вертикально перемещающаяся платформа (3) содержит металлическую пластину (38) и два поршня (37), причем поршни (37) перпендикулярны структуре (38) металлической пластины.
11. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что он содержит сборочное устройство (13), предназначенное для способствования сборке детонатора (8).
12. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.11, отличающийся тем, что он содержит сборочное устройство (13), содержащее: трубный разделитель (25); трубный зажим (26); выравнивающий ролик (27); линейный цилиндр (28) и держатель (29) бустера.
13. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что он содержит три хранилища (12, 15, 17) для безопасного хранения элементов, требуемых для изготовления детонатора (8).
14. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что бак (2) для хранения взрывчатых веществ оборудован двумя разными контейнерами: контейнером для хранения игданита и контейнером для хранения эмульсии.
15. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что бак (2) для хранения взрывчатых веществ оборудован тремя разными контейнерами: контейнером для хранения игданита, контейнером для хранения эмульсии и контейнером для хранения взрывчатых веществ высокой плотности.
16. Автомобиль (1) для закладки взрывчатых веществ во взрывные скважины (10) по п.1, отличающийся тем, что автомобиль (1) полностью независим от человеческого вмешательства, после его расположения на верхней поверхности уступа (39) до подрывных операций.
17. Способ закладки взрывчатых веществ во взрывные скважины с использованием автомобиля по п.1, отличающийся тем, что он содержит следующие этапы, на которых осуществляют:
Этап 1 - автомобиль (1) останавливается около скважины (10);
Этап 2 - механический манипулятор (4) зацепляет первый захват (5) и выполняет планирование скважины (10) с помощью системы наблюдения (36), которая содержится в первом захвате (5);
Этап 3 - механический манипулятор (4) проверяет глубину скважины (10) и наличие воды внутри нее путем ввода зонда в скважину (10);
Этап 4 - закладка первой порции взрывчатого вещества в скважину (10);
Этап 5 - механический манипулятор (4) отцепляет первый захват (5) и зацепляет второй захват (7), предназначенный для манипуляций с детонатором (8);
Этап 6 - механический манипулятор (4) собирает детонатор (8);
Этап 7 - механический манипулятор (4) вводит детонатор (8) в скважину (10) с постоянной скоростью;
Этап 8 - механический манипулятор (4) сбрасывает вес (14) на землю около кромки скважины (10);
Этап 9 - механический манипулятор (4) заменяет второй захват (7) на первый захват (5);
Этап 10 - завершение закладки взрывчатого вещества в скважину (10);
Этап 11 - механический манипулятор (4) заменяет первый захват (5) на третий захват (19);
Этап 12 - механический манипулятор (4) выполняет буферизацию с помощью третьего захвата (19);
Этап 13 - механический манипулятор (4) возвращается на исходную позицию и обеспечивает возможность движения автомобиля (1) по направлению к следующей скважине (10).
18. Способ по п.17, отличающийся тем, что Этап 6 разбит на следующие подэтапы:
Этап 6А - забор бустера (11) из хранилища (12) бустеров, и его транспортировка к сборочному устройству (13);
Этап 6В - забор веса (14) из хранилища (15) весов;
Этап 6С - забор пары запалов (16) из хранилища (17) для запалов и детонационных шнуров, и подъем этих элементов для облегчения разматывания детонационных шнуров (18);
Этап 6D - проведение детонационных шнуров (18) через сборочное устройство (13);
Этап 6Е - подъем линейного цилиндра (28) так, чтобы запалы (16) были доступны в нижней части бустера (11); и
Этап 6F - выполнение поворота запалов (16) так, чтобы выполнить петлю, и обеспечить возможность их повторного ввода в бустер (11).
| WO 2014063188 A1, 01.05.2014 | |||
| Зеркально-линзовый объектив | 1959 |
|
SU127448A1 |
| Способ формирования короткой комбинированной засыпной забойки взрывных скважин с распорным конусом и устройство для его осуществления | 2015 |
|
RU2608101C1 |
| СПОСОБ ПОЛУЧЕНИЯ УКСУСНОЙ КИСЛОТЫ И/ИЛИ МЕТИЛАЦЕТАТА ПОСРЕДСТВОМ ИЗОМЕРИЗАЦИИ МЕТИЛФОРМИАТА | 1997 |
|
RU2176635C2 |
| US 6996462 B2, 07.02.2006 | |||
| US 8261664 B2, 11.09.2012 | |||
| US 8950330 B2, 10.02.2015. | |||

