Изобретение относится к горнодобывающей, обогатительно-металлургической и химической отраслям промышленности и используется в автоматических системах аналитического контроля как стадия автоматического представительного отбора первичной пробы с возможностью доставки проб к месту выполнения измерения содержания основных металлов в пробе.
Известны различные типы автоматических устройств отбора проб от различных технологических потоков:
- динамические пробоотборники секторные и цепные для потоков, имеющих перепад по высоте с отбором проб на вертикальном участке падающего турбулентного потока с полным его пересечением;
- напорные пробоотборники, предназначенные для отбора проб, движущихся по трубопроводу под давлением, а в месте отбора проб создаются дополнительные условия для перемешивания суспензии с целью получения представительности отбираемой пробы;
- вакуумные пробоотборники жидких продуктов, пульп и суспензий от технологических потоков №2687931, C2 G01N 1/10, RU, выполняющие в основном точечный отбор технологических проб из емкостей типа зумпфов, в которых различными способами создают условия для интенсивного перемешивания суспензии;
Особенностью отбора проб от самотечных технологических потоков, движущихся по открытым желобам, является ламинарность потока с расслоением твердых частиц по высоте движущегося слоя и отсутствие возможности размещения оборудования отбора под технологическим желобом.
Известно техническое решение по патенту №2353913 от 19.07.2007, RU, Пробоотборник содержит органы управления, слива и систему заборных труб
Однако, пробоотборник, с постоянно находящимися в потоке пробоотборными трубками способствует отбору не только проб, но и улавливанию и накоплению на них и внутри себя щепы и мусора, находящегося в потоке, что требует непроизводительных трудозатрат для очистки их вручную, а в совокупности с зарастанием внутреннего сечения каждой пробоотборной трубки не обеспечивает основных требований представительности пробоотбора.
Близким аналогом является техническое решение Хвостовой автоматический пробоотборник «ХАП-1800» 1980 г производства «СОЮЗЦВЕТМЕТАВТОМАТИКА», предназначенный для автоматического отбора проб из желобов и баков http://www.scma.ru/ru/hroducts/263.html.
Пробоотборник содержит
неподвижную раму, установленную над желобом и закрепленную растяжками,
щуп пробоотборника, имеющий специальные прорези,
систему промывки,
систему управления работой щупа.
Достоинством устройства является возможность выполнять основную функцию отбора проб от самотечных технологических потоков.
Однако многократное пересечение технологического потока за цикл отбора не обеспечивает представительность пробы по содержанию ценных компонентов в твердом за счет сегрегации тяжелых фракций, постоянном изменении потока по глубине и потери части пробы при каждом выходе щупа за пределы потока.
Предлагаемая автоматическая система отбора проб от самотечных технологических потоков, движущихся по открытым желобам, предназначена для автоматического представительного дискретного отбора ограниченного объема проб от технологических потоков различной производительности, транспортируемого по открытым желобам, с изменяющейся глубиной слоя потока и системой отслеживания этого параметра, с последующей транспортировкой проб к месту проведения измерения и промывкой транспортных трактов в каждом цикле отбора.
Техническое решение реализуется системой, содержащей комплекс блоков и устройств, работающих в определенной связи и последовательности между собой с использованием эжекторов, управляемых клапанов, электропневмоаппаратуры, управляющей ПЛК согласно циклограмме и программного продукта с использованием дата панели для выполнения наладочных работ и визуализации процесса отбора.
Система содержит
неподвижную раму, установленную над желобом и закрепленную растяжками,
щуп пробоотборника - пробоотборный нож, имеющий специальные прорези,
систему автоматической промывки трактов транспортировки проб,
систему управления работой устройств, при этом
устройство крепления механизма принудительного погружения подвижного пробоотборного устройства в самотечный поток, движущийся по открытому желобу, выполнено в виде неподвижных кронштейнов, установленных на стенках технологического желоба, на котором закреплены:
размещенная в неподвижной направляющей раме подвижная каретка, перемещающаяся на роликах в вертикальной плоскости, с закрепленными на ней пробоотборными ножами; приводной вал с опорами качения, расположенный в верхней части устройства крепления на неподвижных кронштейнах, на котором закреплены ведомый шкив-барабан с тросовой передачей движения на подвижную каретку и ведущий шкив-барабан с тросовой передачей движения приводному валу от приводного устройства;
приводное устройство, состоящее из бесштокового пневмоцилиндра с датчиками крайних положений поршня и кареткой пневмоцилиндра, к которой прикреплена ветвь тросовой передачи для преобразования прямолинейного движения каретки пневмоцилиндра во вращательное движение приводного вала с расположенными на нем ведущим и ведомым шкивами-барабанами, при этом разность диаметров ведущего и ведомого шкивов-барабанов тросовых передач обеспечивает расчетный ход подвижной каретки с пробоотборными ножами вглубь потока при ограниченном ходе каретки пневмоцилиндра, а для регулировки скорости движения каретки размещены дроссели подачи сжатого воздуха в полости пневмоцилиндра;
пробоотборный нож в виде горизонтального патрубка, разделенного на две половины, соединенные между собой заглушкой, с равномерно расположенными отверстиями в нижней его части, суммарная площадь сечения которых соответствует суммарной площади проходных сечений отводящих патрубков, каждая часть пробоотборного ножа соединена с соответствующей приемоотправительной станцией ПОС шлангом, на котором размещен датчик протока, а приемоотправительная станция оснащена вибрационным датчиком уровня и двухходовым диафрагменным клапаном для переключения направления движения пробы при ее отборе и последующей транспортировке к месту измерения, при этом пробоотборный нож размещен в исходном положении над потоком и длина ножа соответствует ширине технологического потока;
устройство обеспечения двух стадиальной последовательной автоматической промывки с продувкой транспортных трактов отбора проб и доставки их к месту измерения в каждом цикле отбора проб, в которое введен пневмоуправляемый клапан подачи промывочной воды;
шкаф электропневмоуправления системой в автоматическом цикле с устройством подготовки воздуха в виде фильтра-регулятора, электропневмоклапанами, эжекторами, контроллером, программным продуктом и дата панелью.
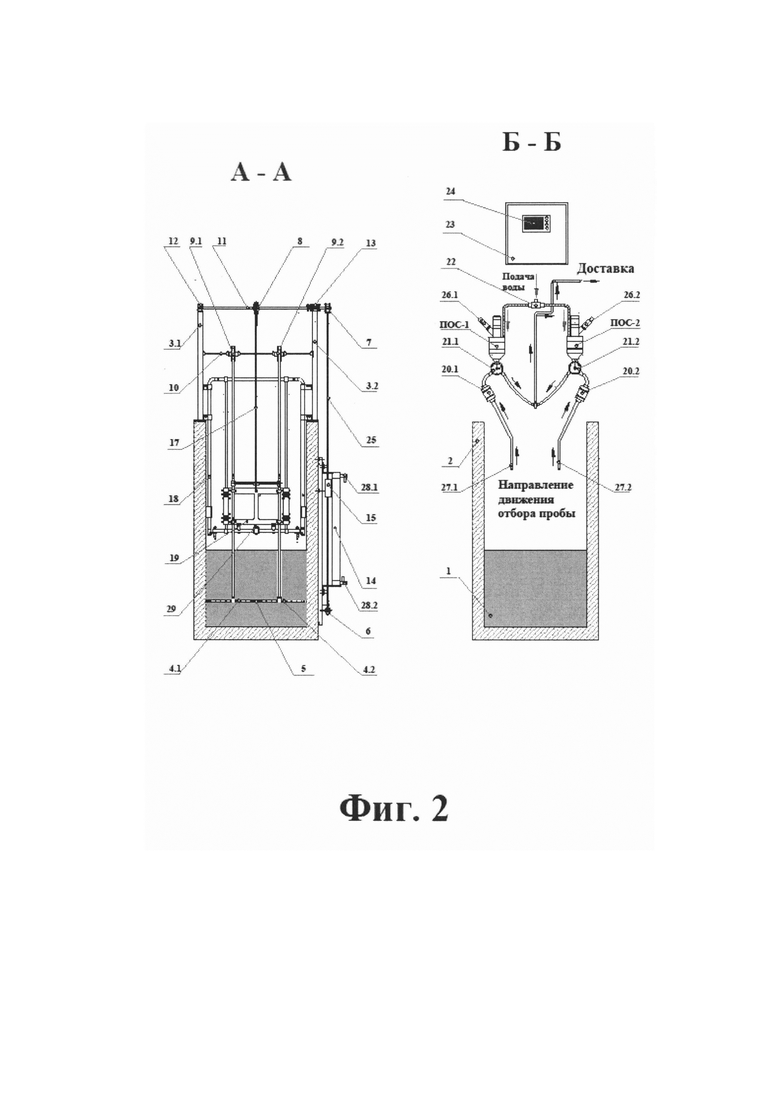
На Фиг. 1 и Фиг. 2 представлена Схема системы отбора проб от самотечных технологических потоков, движущихся по открытым желобам, где:
1 - самотечный технологический поток;
2 - открытый технологический желоб;
3.1 и 3.2 - неподвижные кронштейны для крепления оборудования;
4.1 и 4.2 - пробоотборные ножи;
5 - соединительная заглушка;
6 - натяжной ролик ведущей тросовой передачи;
7 - ведущий шкив-барабан;
8 - ведомый шкив-барабан;
9.1 и 9.2 -отклоняющие шкивы шлангов;
10 - ось отклоняющих шкивов;
11 - вал шкивов-барабанов;
12 - подшипниковая опора вала левая;
13 - подшипниковая опора вала правая;
14 - бесштоковый пневмоцилиндр;
15 - подвижная каретка бесштокового пневмоцилиндра;
16.1 и 16.2 - датчики крайнего верхнего и нижнего положения поршня;
17 - тросовая передача движения каретки с пробоотборными ножами;
18 - направляющая рама подвижной каретки;
19 - подвижная каретка крепления пробоотборных ножей;
20.1 и 20.2 - датчики протока пробы;
21.1 и 21.2 - двухходовые диафрагменные клапаны;
22 - клапан подачи воды;
23 - ШУП-1 шкаф электропневмоуправления;
24 - дата панель;
25 - тросовая передача ведущего шкива-барабана;
26.1 и 26.2 - вибрационные датчики уровня ПОС;
ПОС1 и ПОС2 - приемоотправительные станции;
27.1 и 27.2 - шланги подачи проб от пробоотборных ножей;
28.1 и 28.2 - пневмодроссели подачи сжатого воздуха;
29 - натяжной ролик ведомой тросовой передачи.
Работа системы осуществляется следующим образом.
Оборудование автоматического устройства на Фиг. 2 и Фиг. 1 закреплено с помощью неподвижных кронштейнов 3.1 и 3.2, установленных на стенках открытого технологического желоба 2 с самотечным технологическим потоком 1. Оборудование содержит механизм принудительного погружения в технологический поток пробоотборных ножей 4.1 и 4.2 с продувкой их сжатым воздухом во время погружения и с последующим вакуумным отбором проб при подъеме их, начиная от донной поверхности желоба вплоть до выхода пробоотборных ножей из потока.
В исходном положении пробоотборные ножи 4.1, 4.2 находятся над технологическим потоком 1 в крайнем верхнем положении. В соответствии с циклограммой по команде от контроллера, расположенного в шкафу управления 23 ШУП-1, сжатый воздух подается в приемоотправительные станции ПОС.1, ПОС.2, а через дроссель 28.1 в верхнюю полость пневмоцилиндра 14. При этом сжатый воздух из ПОС.1 и ПОС.2, через двухходовые диафрагменные клапаны 21.1 и 21.2, шланги 27.1 и 27.2 продувает сжатым воздухом соединенные заглушкой 5 пробоотборные ножи 4.1 и 4.2, и при этом осуществляется плавное движение вниз каретки пневмоцилиндра 15 и с помощью тросовой передачи 25, ведущего шкива-барабана 7 вала 11 и ведомого шкива-барабана 8, тросовой передачи 17 движение передается на каретку 19 с закрепленными на ней пробоотборными ножами 4.1 и 4.2, осуществляя погружение их в самотечный технологический поток 1.
При достижении ножами 4.1 и 4.2 донной части желоба по сигналу от датчика 16.2 Фиг. 1 крайнего нижнего положения поршня пневмоцилиндра 14, согласно циклограмме и по команде от контроллера, подается вакуум в ПОС.1, ПОС.2 и давление сжатого воздуха через дроссель 28.2 в нижнюю полость пневмоцилиндра 14. Начинается засасывание пробы через пробоотборные ножи 4.1 и 4.2, соединительные шланги 27.1 и 27.2 и двухходовые диафрагменные клапаны 21.1 и 21.2. Производится накопление пробы в приемоотправительных станциях ПОС.1 и ПОС.2 при одновременном подъеме с полным пересечении технологического потока пробоотборными ножами 4.1 и 4.2 вплоть до их выхода из технологического потока 1.
При выходе из потока пробоотборных ножей 4.1 и 4.2 прерывается движение пробы в транспортных шлангах 27.1 и 27.2 и срабатывает сигнал от датчиков протока 20.1 и 20.2, по этому сигналу, согласно циклограмме и по команде от контроллера, в полости ПОС.1 и ПОС.2 вместо вакуума подается сжатый воздух, переключаются диафрагмы двухходовых диафрагменных клапанов 21.1 и 21.2, и начинается доставка накопленной ранее в ПОС.1 и ПОС.2 проб к месту измерения. Продолжительность транспортировки зависит от длины трассы, определяется эмпирически и время закладывается в циклограмму. При этом движение каретки 19 с пробоотборными ножами продолжается вверх, вплоть до получения команды от датчика 16.1 на Фиг. 1 крайнего верхнего положения поршня бесштокового пневмоцилиндра 14.
При изменении уровня технологического потока и постоянной скорости пробоотборного ножа меняется время нахождения пробоотборного ножа в потоке и, соответственно, меняется объем отобранной разовой пробы и количества твердого в ней, что отражается в накопительной обезвоженной пробе и характеризует количество твердого в технологическом потоке и его производительность.
По окончании доставки, согласно циклограмме, производится промывка транспортных трактов в два этапа. В начале промывается тракт от приемоотправительных станций ПОС.1 и ПОС.2 до пробоотборных ножей 4.1 и 4.2. Для этого, согласно циклограмме и по команде от контроллера, прекращается подача сжатого воздуха в ПОС.1 и ПОС.2, открывается пневмоуправляемый клапан подачи промывочной воды 22, начинается заполнение водой ПОС.1 и ПОС.2 до уровня, определяемого вибрационными датчиками 26.1 и 26.2. По сигналу от датчиков 26.1 и 26.2, в соответствии с циклограммой и по команде от контроллера, закрывается клапан подачи промывочной воды 22, переключаются двухходовые диафрагменные клапаны 21.1 и 21.2, подается сжатый воздух в ПОС.1 и ПОС.2. Накопленная в ПОС. вода под действием сжатого воздуха производит промывку и продувку и сливается по соединительным шлангам 27.1 и 27.2 через пробоотборные ножи 4.1 и 4.2 прямо в технологический поток 1.
По окончании времени на промывку пробоотборных ножей, начинается этап промывки тракта доставки проб от приемоотправительной станции до места проведения анализа или места обезвоживания и накопления средних проб в твердом виде.
При этом согласно циклограмме и по команде от контроллера прекращается подача сжатого воздуха в ПОС.1 и ПОС.2, переключаются двухходовые диафрагменные клапаны 21.1 и 21.2, открывается клапан подачи промывочной воды 22, вода заполняет ПОС.1 и ПОС.2 до уровня, определяемого вибрационными датчиками уровня 26.1 и 26.2. По сигналу от датчиков 26.1 и 26.2, в соответствии циклограммой, и по команде от контроллера, закрывается клапан подачи промывочной воды 22, подается сжатый воздух в ПОС.1 и ПОС.2, и ранее накопленная вода под действием сжатого воздуха транспортируется к месту измерения, промывая и продувая тем самым трассу доставки пробы. Время промывки зависит от длины трассы, определяется эмпирически и учитывается в циклограмме.
На этом заканчивается цикл отбора проб. Система очищена от остатков предыдущей пробы и готова к отбору следующей порции проб.
Для выполнения наладочных работ в ручном режиме в шкафу управления 23 предусмотрена дата панель 24.
Заявляемое техническое решение «Автоматическая система отбора проб от самотечных технологических потоков, движущихся по открытым желобам», позволяет обеспечить автоматический представительный дискретный отбор ограниченного объема проб от технологических потоков различной производительности с изменяющейся глубиной слоя, транспортируемого по открытым желобам, с последующей транспортировкой проб к месту проведения измерения и промывкой транспортных трактов в каждом цикле отбора.
Заявляемое техническое решение разработано и опробовано в АО «ТЕХНОЛИНК» Санкт-Петербург, РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА АНАЛИТИЧЕСКОГО КОНТРОЛЯ ЖИДКИХ ПРОБ | 2009 |
|
RU2419776C2 |
| Система автоматической подачи и циркуляции проб суспензий и растворов в проточную измерительную ячейку одноканальных многопоточных анализаторов | 2020 |
|
RU2764437C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОТБОРА, ПОДГОТОВКИ И ДОСТАВКИ ПРОБ ФИЛЬТРАТОВ | 2006 |
|
RU2331055C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОДАЧИ И ЦИРКУЛЯЦИИ СУСПЕНЗИЙ И РАСТВОРОВ В ПРОТОЧНОЙ ИЗМЕРИТЕЛЬНОЙ ЯЧЕЙКЕ АНАЛИЗАТОРОВ | 2013 |
|
RU2534236C2 |
| УСТРОЙСТВО ДЛЯ ФИЛЬТРАЦИИ И ОТБОРА ПРОБ ЖИДКОСТЕЙ В СОСУДАХ ПОД ДАВЛЕНИЕМ | 2014 |
|
RU2548398C1 |
| Вакуумный пробоотборник жидких продуктов, пульп и суспензий от технологических потоков | 2016 |
|
RU2687931C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ ИЗ ЖЕЛОБОВ И КАНАЛОВ В ПОТОКЕ АБРАЗИВНЫХ ПУЛЬП | 2018 |
|
RU2686218C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ В ПОТОКЕ ЖИДКОТЕКУЧИХ ВЫСОКОАБРАЗИВНЫХ ПРОМПРОДУКТОВ | 2017 |
|
RU2665000C1 |
| СПОСОБ ДОСТАВКИ ПРОБ РАДИОАКТИВНЫХ РАСТВОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2569556C1 |
| ПРОБООТБОРНОЕ УСТРОЙСТВО "ПОТОК-1М" | 2012 |
|
RU2513730C1 |

Изобретение относится к горнодобывающей, обогатительно-металлургической и химической отраслям промышленности. Раскрыта автоматическая система отбора проб от самотечных потоков, движущихся по открытым желобам, содержащая неподвижную раму, установленную над желобом и закрепленную растяжками; пробоотборный нож; систему промывки и систему управления работой пробоотборного ножа. При этом система также содержит устройство крепления механизма принудительного погружения подвижного пробоотборного устройства в самотечный поток; размещенную в неподвижной направляющей раме подвижную каретку с закрепленными на ней пробоотборными ножами; приводной вал с опорами качения; приводное устройство; устройство обеспечения двухстадиальной последовательной автоматической промывки с продувкой транспортных трактов отбора проб и тракта доставки проб к месту измерения; шкаф электропневмоуправления системой в автоматическом цикле. Изобретение обеспечивает автоматический представительный дискретный отбор ограниченного объема проб от технологических потоков различной производительности с изменяющейся глубиной слоя. 3 ил.
Автоматическая система отбора проб от самотечных потоков, движущихся по открытым желобам, содержащая
- неподвижную раму, установленную над желобом и закрепленную растяжками,
- пробоотборный нож, имеющий специальные прорези,
- систему промывки,
- систему управления работой пробоотборного ножа,
отличающаяся тем, что введены:
- устройство крепления механизма принудительного погружения подвижного пробоотборного устройства в самотечный поток, движущийся по открытому желобу, выполненное в виде неподвижных кронштейнов, установленных на стенках технологического желоба, на котором закреплены:
- размещенная в неподвижной направляющей раме подвижная каретка, перемещающаяся на роликах в вертикальной плоскости, с закрепленными на ней пробоотборными ножами; приводной вал с опорами качения, расположенный в верхней части устройства крепления на неподвижных кронштейнах, на котором закреплены ведомый шкив-барабан с тросовой передачей движения на подвижную каретку и ведущий шкив-барабан с тросовой передачей движения приводному валу от приводного устройства;
- приводное устройство, состоящее из бесштокового пневмоцилиндра с датчиками крайних положений и кареткой пневмоцилиндра, к которой прикреплена ветвь тросовой передачи для преобразования прямолинейного движения каретки пневмоцилиндра во вращательное движение приводного вала с расположенными на нем ведущим и ведомым шкивами-барабанами, при этом разность диаметров ведущего и ведомого шкивов-барабанов тросовых передач обеспечивает расчетный ход подвижной каретки с пробоотборными ножами вглубь потока при ограниченном ходе каретки пневмоцилиндра, а для регулировки скорости движения каретки размещены дроссели подачи сжатого воздуха в полости пневмоцилиндра;
- пробоотборный нож в виде горизонтального патрубка, разделенного на две половины, соединенные между собой заглушкой, с равномерно расположенными отверстиями в нижней его части, суммарная площадь сечения которых соответствует суммарной площади проходных сечений отводящих патрубков, каждая часть ножа соединена с соответствующей приемоотправительной станцией (ПОС) шлангом, на котором размещен датчик протока, а приемоотправительная станция оснащена вибрационным датчиком уровня и двухходовым диафрагменным клапаном для переключения направления движения пробы при ее отборе и последующей транспортировке к месту измерения, при этом пробоотборный нож размещен в исходном положении над потоком и длина ножа соответствует ширине технологического потока;
- устройство обеспечения двухстадиальной последовательной автоматической промывки с продувкой транспортных трактов отбора проб и тракта доставки проб к месту измерения в каждом цикле отбора проб, в которое введен пневмоуправляемый клапан подачи промывочной воды;
- шкаф электропневмоуправления системой в автоматическом цикле с устройством подготовки воздуха в виде фильтра-регулятора, электропневмоклапанами, эжекторами, контроллером, программным продуктом и дата-панелью.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ ИЗ ЖЕЛОБОВ И КАНАЛОВ В ПОТОКЕ АБРАЗИВНЫХ ПУЛЬП | 2018 |
|
RU2686218C1 |
| Электрический выключатель | 1933 |
|
SU32600A1 |
| ПРОБООТБОРНИК | 2007 |
|
RU2353913C1 |
| US 10203702 B2, 12.02.2019. | |||

