ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к области техники, связанной с контролем железнодорожных вагонов, например несамоходных железнодорожных вагонов.
ПРЕДПОСЫЛКИ
В патенте США 6,006,868 раскрыта соответствующая система для контроля состояния ручного тормоза в железнодорожном вагоне, которая, однако, не обладает эксплуатационной надежностью.
В патенте США 9,026,281 раскрыто устройство для контроля состояния ручного тормоза железнодорожного вагона, содержащего рукоятку с ручным управлением, причем указанное устройство содержит несущий нагрузку элемент, выполненный с возможностью введения в рычаг системы ручного тормоза железнодорожного вагона таким образом, что усилие, приложенное к указанной тормозной системе, проходит через несущий нагрузку элемент. Механическое напряжение измеряется с помощью тензодатчика, установленного на несущем нагрузку элементе. Информация, полученная от тензодатчика, указывает на усилие, прилагаемое ручным тормозом к тормозу, и используется для определения состояния ручного тормоза. Также имеются средства для определения движения железнодорожного вагона. В одном варианте, если определено, что тормоз включен, а железнодорожный вагон находится в движении, то передается информация, например сигнал тревоги. Кроме того, также предложены система и способ контроля ручного тормоза железнодорожного вагона.
Поскольку решение, описанное в патенте США 9,026,281, основано на измерении механического напряжения, в нем отсутствует средство для определения состояния ручного тормоза, когда к несущему нагрузку элементу не приложена никакая нагрузка. Кроме того, указанное решение не обеспечивает точности, поскольку основано на измерении механического напряжения, которое является ненадежным показателем состояния ручного тормоза. Действительно, точное механическое напряжение, возникающее в системе ручного тормоза, зависит от многих факторов окружающей среды, таких как температура и влажность, и может увеличиваться с течением времени вследствие износа указанной системы. Кроме того, принцип, описанный в патенте США 9,026,281, предполагает, что усилие можно «отвести» из системы ручного тормоза и направить через тензодатчик, что приводит к чрезмерно сложному и/или неточному контролю и может даже нарушить надлежащее функционирование ручного тормоза в случае проблем с контролирующим механизмом/системой.
В патентном документе США 2008/0252515 раскрыта система для контроля железнодорожных вагонов, содержащая узел люковой крышки, который содержит корпус крышки, датчик, беспроводной передатчик для передачи данных, полученных от указанного датчика, беспроводной приемник для приема данных от указанного беспроводного передатчика и спутниковый передатчик для передачи данных на спутник. Беспроводной приемник и спутниковый передатчик прикреплены к узлу люковой крышки. В одном варианте выполнения датчик представляет собой датчик натяжения цепи, присоединенный к цепи ручного тормоза.
Поскольку система, описанная в патентном документе США 2008/0252515, основана на измерении механического напряжения в системе ручного тормоза, содержащей цепь, в указанной системе отсутствуют средства для контроля ручных тормозов, которые не содержат цепи. Кроме того, указанная система является чрезмерно сложной и неточной, поскольку основана на измерении механического напряжения, которое, как отмечено выше, является ненадежным показателем состояния ручного тормоза вследствие вышеизложенных причин.
В патенте США 3,854,417 раскрыта система автоматического визуального указателя ручного тормоза для ручных тормозов, установленных на грузовых платформах, и ручных тормозов обычного типа, в которой предусмотрены индикаторные флажки, перемещающиеся между выключенным положением (OFF), при котором они находятся вблизи вагона, и включенным положением (ON), при котором они выступают за боковые борта вагона и видны из любого местоположения вдоль железнодорожного пути или состава вагонов.
Система согласно патенту США 3,854,417 обеспечивает возможность контроля системы ручного тормоза, но не обладает гибкостью, поскольку контроль ограничен визуальным сигналом, что требует от контролирующего находиться достаточно близко, чтобы видеть сигнал. Кроме того, система согласно патенту США 3,854,417 содержит сложную комбинацию подвижных компонентов, приводимых в действие системой ручного тормоза. Это является недостатком, поскольку может нарушать надлежащее функционирование ручного тормоза.
В патентном документе США 2012/0271523 предложен способ управления автоматическим стояночным тормозом в механическом транспортном средстве, приводной механизм которого содержит трансмиссию и муфту, причем точка мгновенного сцепления муфты устанавливается во время рулевого управления механическим транспортным средством, а наличие запроса на запуск проверяется, когда задействован стояночный тормоз. Если обнаружен запрос на запуск, то задействованный стояночный тормоз автоматически отпускается, при этом обнаружение наличия запроса на запуск происходит в зависимости от установленной точки сцепления муфты.
Способ согласно патентному документу США 2012/0271523 относится к ручному тормозу (стояночному тормозу) транспортного средства, но не подходит для конкретного случая ручного тормоза железнодорожного вагона. Кроме того, указанный способ неприменим, если транспортное средство не содержит муфты. Более того, указанный способ относится прежде всего к автоматическому отпусканию стояночного тормоза и не предусматривает каких-либо иных средств для контроля состояния ручного тормоза, помимо средств, известных из уровня техники.
Данное изобретение направлено на решение по меньшей мере некоторых из вышеуказанных проблем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В первом аспекте данного изобретения предложен способ контроля ручного тормоза по меньшей мере одного железнодорожного вагона, предпочтительно несамоходного железнодорожного вагона, по пункту 1 формулы изобретения.
При этом указанный железнодорожный вагон может представлять собой любой грузовой железнодорожный вагон, или железнодорожную цистерну, или другой подходящий железнодорожный вагон, используемый для перевозки грузов в системе железнодорожного транспорта, причем при сцепке друг с другом и тяге одним или более локомотивами такие вагоны образуют состав. Используемое в данном документе выражение «несамоходный железнодорожный вагон» относится к вариантам выполнения, в которых железнодорожный вагон не снабжается электроэнергией для его эксплуатации. В таком варианте выполнения механизм ручного тормоза не требует электроэнергии, поскольку в железнодорожном вагоне она отсутствует. Примером несамоходного железнодорожного вагона является грузовой вагон.
Способ согласно данному изобретению преимущественно обеспечивает оценку на основании относительного положения первого детекторного элемента, зафиксированного относительно рамы, и второго детекторного элемента, зафиксированного относительно части тормозной рычажной системы. Благодаря этой комбинации контроль является более надежным, более точным, более удобным для пользователя и более эффективным с точки зрения энергозатрат, чем в известных способах, в которых отсутствует указанный второй детекторный элемент, как, например, в способе, раскрытом в патенте США 6,006,868.
Таким образом, данное изобретение преимущественно основано на измерении расстояния между отдельными и материальными детекторными элементами, а не на принятии одного или более компонентов тормозной рычажной системы в качестве точки отсчета и выполнении измерения непосредственно на указанных одном или более компонентах. Это особенно важно в тех случаях, когда указанные один или более компонентов не могут обеспечить надежную точку отсчета. Отдельный второй детекторный элемент обеспечивает лучшую точку отсчета по сравнению с самими компонентами тормозной рычажной системы, например, ввиду изменения поверхностных признаков выбранного компонента с течением времени, например, вследствие наличия ржавчины, грязи или влаги на поверхности выбранного компонента. Все это может привести к ненадежным измерениям при использовании указанных одного или более компонентов в качестве точки отсчета. Кроме того, отдельный второй детекторный элемент является преимущественным с точки зрения операций по техническому обслуживанию. В одном случае техническое обслуживание может включать очистку или обработку поверхности компонентов, что приводит к ухудшению эталонности данных компонентов и требует по меньшей мере повторной калибровки, которая может быть дорогостоящей и/или трудновыполнимой. В противоположность этому, предпочтительно отдельный второй детекторный элемент, например магнит, может быть устойчив к такой очистке или обработке. Как вариант, отдельный второй детекторный элемент может быть локально защищен от очистки или обработки путем его покрытия, например, куском маскировочной ленты. В еще одном варианте выполнения второй детекторный элемент прикреплен с возможностью отсоединения, например, при помощи съемной наклейки, удаляемого клея или одного или двух винтов и может быть легко удален перед очисткой или обработкой и возвращен обратно после их выполнения, без необходимости повторной калибровки. Кроме того, возможность разъемного прикрепления может обеспечить легкую калибровку, при которой детекторный элемент повторно позиционируют несколько раз до тех пор, пока не будет удовлетворен некий заранее определенный критерий калибровки. Кроме того, важно отметить, что для технического обслуживания может потребоваться замена указанных одного или более компонентов, при этом новые компоненты, как правило, имеют другие поверхностные характеристики вследствие отсутствия ржавчины или грязи и/или по причине того, что они поставляются другим поставщиком запасных частей или относятся к другому типу. Несмотря на то что это влечет за собой необходимость в приложении значительных усилий по повторной калибровке в случае, когда компонент используется в качестве точки отсчета, эти усилия уменьшены или даже устранены в предпочтительном варианте выполнения, в котором второй детекторный элемент может быть легко снят со старого компонента и прикреплен к новому компоненту, как в иллюстративном случае использования магнита в качестве второго детекторного элемента.
Следовательно, данное изобретение является более точным и более эффективным с точки зрения энергозатрат. Благодаря выполнению распознаваемого второго детекторного элемента с максимальным размером предпочтительно менее 60 мм положение указанного элемента может быть определено более точно и эффективно, чем в случае необходимости отслеживания положения всего компонента. В целом, известные способы, в которых отсутствует второй детекторный элемент и которые основаны на принятии одного или более компонентов в качестве точки отсчета, не обеспечивают точности и/или эффективности вследствие разброса сигнала, используемого для обнаружения, по значительной и, возможно, неровной поверхности указанных одного или более компонентов. Например, способ и система, раскрытые в патенте США 6,006,868, являются неточными вследствие разброса сигнала, используемого для обнаружения, по неровной поверхности рычагов тормозной системы.
В одном предпочтительном варианте выполнения данного изобретения один из указанных первого и второго детекторных элементов представляет собой излучающий детекторный элемент, предназначенный для испускания сигнала, исходящего от указанного излучающего детекторного элемента, причем указанный сигнал предпочтительно представляет собой непрерывно испускаемый сигнал, при этом другой элемент из указанных первого и второго детекторных элементов представляет собой принимающий детекторный элемент, предназначенный для обнаружения указанного сигнала от излучающего детекторного элемента.
В данном случае выражение «активный детекторный элемент» относится к детекторному элементу, который при работе потребляет электроэнергию и, следовательно, может требовать подачи электрической мощности от кабеля, батареи или эквивалентных средств, таких как источник аккумулируемой энергии. В отличие от этого, выражение «пассивный детекторный элемент» относится к детекторному элементу, который при работе не потребляет электроэнергии и, следовательно, не требует электрической мощности. Кроме того, под указанным сигналом, исходящим от излучающего детекторного элемента, понимается такой сигнал, как магнитная волна или световая волна, испускаемая излучающим детекторным элементом без помехи со стороны принимающего детекторного элемента. Этот сигнал может содержать, например, магнитные волны в случае, когда излучающий детекторный элемент представлен магнитом, или световые волны в случае, когда излучающий детекторный элемент представлен оптически обнаруживаемой меткой. В последнем случае световые волны могут быть получены из внешнего света, предпочтительно непрерывно подаваемого света от источника, находящегося вблизи излучающего детекторного элемента и/или входящего в его состав, и излучать свет на оптически обнаруживаемую метку и/или подсвечивать ее и испускаться по направлению к активному детекторному элементу. В соответствующем варианте выполнения оптически обнаруживаемая метка может иметь флуоресцентную поверхность или поверхность на основе бета-излучения.
Такой вариант выполнения является преимущественным, поскольку устраняет недостатки обычного механизма обнаружения, в котором один детекторный элемент, например первый детекторный элемент, действует в качестве как излучателя, так и приемника, что приводит к двойному прохождению сигнала, вследствие чего расстояние между первым детекторными элементами покрывается дважды. При выполнении одного детекторного элемента в качестве излучателя и одного детекторного элемента в качестве приемника указанное расстояние покрывается только один раз. Поскольку интенсивность сигнала, как правило, падает не пропорционально расстоянию, а быстрее, то эффективность с точки зрения энергозатрат и точность способа с разделенными излучателем и приемником значительно повышены по сравнению с известными способами и системами, в которых излучатель и приемник содержатся в одном детекторном элементе. Например, при сферически однородном испускании сигнала интенсивность сигнала обратно пропорциональна квадрату указанного расстояния. Соответственно, интенсивность сигнала возрастает в 4 раза, если излучатель и приемник выполнены отдельно в указанных первом и втором детекторных элементах, а не объединены в одном детекторном элементе. Это может привести к улучшенному соотношению «сигнал-шум» в принимающем детекторном элементе, что приводит к повышенной точности и/или снижению требований к излучателю, относящихся к интенсивности сигнала.
Во втором аспекте данного изобретения предложен железнодорожный вагон, предпочтительно несамоходный железнодорожный вагон, по пункту 13 формулы изобретения.
В третьем аспекте данного изобретения предложена контролирующая системе для контроля ручного тормоза по меньшей мере одного железнодорожного вагона, предпочтительно несамоходного железнодорожного вагона, в соответствии с данным изобретением, причем указанная контролирующая система выполнена с возможностью осуществления способа согласно данному изобретению.
В четвертом аспекте данного изобретения предложен набор для контроля ручного тормоза по меньшей мере одного железнодорожного вагона, предпочтительно несамоходного железнодорожного вагона, по пункту 15 формулы изобретения.
Преимущества такого несамоходного железнодорожного вагона, такой контролирующей системы и такого набора аналогичны преимуществам предложенного способа. Кроме того, такой набор является преимущественным с той точки зрения, что он может быть легко использован для установки контролирующей системы на имеющемся железнодорожном вагоне с предварительно установленным ручным тормозом.
Другие предпочтительные варианты выполнения, а также примеры рассмотрены в разделе, относящемся к подробному описанию.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 изображает предпочтительный вариант грузового вагона согласно данному изобретению,
Фиг. 2 изображает предпочтительный вариант контролирующей системы с двумя детекторными элементами согласно данному изобретению,
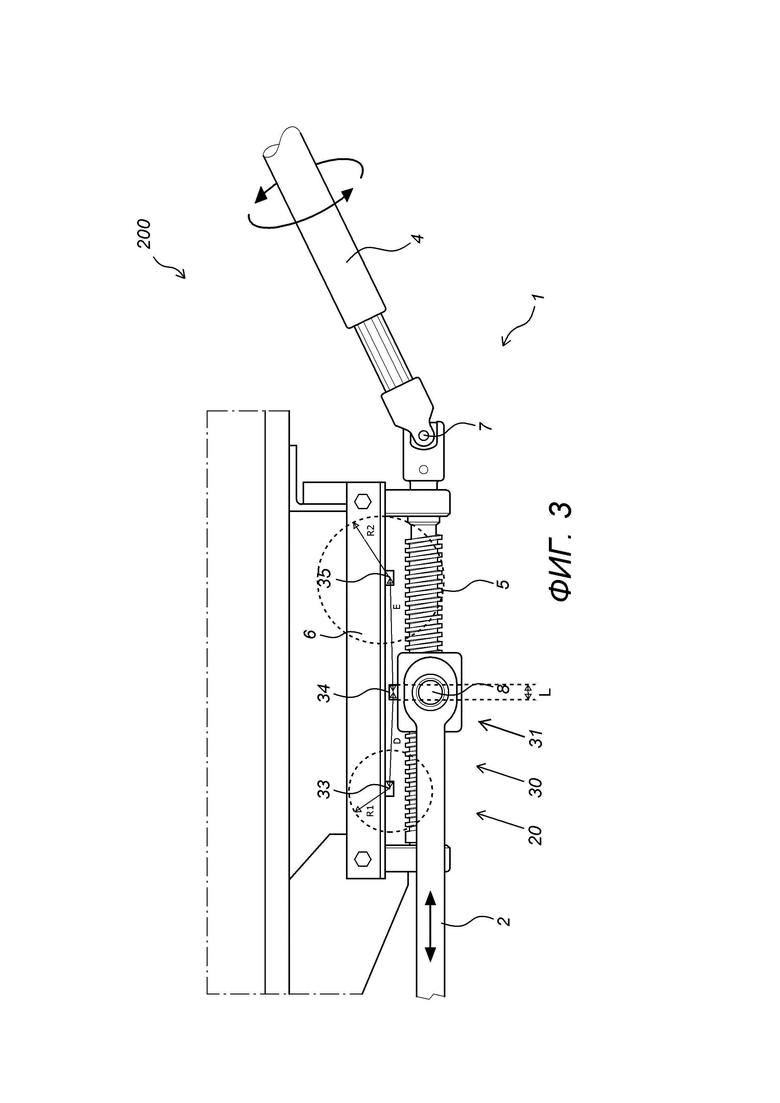
Фиг. 3 изображает предпочтительный вариант контролирующей системы с тремя детекторными элементами согласно данному изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Железнодорожные вагоны обычно представляют собой грузовые вагоны или железнодорожные цистерны или другие подходящие железнодорожные вагоны, используемые для перевозки грузов в системе железнодорожного транспорта, причем при сцепке друг с другом и тяге одним или более локомотивами такие вагоны образуют состав. Вагоны такого типа также называют железнодорожными вагонами, товарными вагонами, грузовыми вагонами, багажными вагонами и т.д. Особую важность для рассматриваемой заявки представляют несамоходные железнодорожные вагоны, также называемые несамоходными транспортными единицами. Эти единицы содержат раму, при помощи которой несамоходную транспортную единицу свободно укладывают на различные одиночные объекты, состоящие из одной оси и пары колес и называемые также колесными парами. Такая колесная пара представляет собой узел из колес, соединенных осью железнодорожного вагона и катящихся по железнодорожному пути. В большинстве случаев железнодорожные вагоны содержат две тележки, каждая из которых содержит две или три колесные пары. Эти тележки или ходовые части образуют под каждым концом железнодорожного вагона каркасный узел, который удерживает колесные пары и обеспечивает возможность поворота вокруг по существу вертикальной оси поворота относительно железнодорожного вагона. Однако имеется возможность, например, для коротких товарных вагонов, установки колесных пар без тележек, например установки двух колесных пар на обоих концах такого короткого товарного вагона непосредственно на раме вагона. Такие транспортные единицы, которые представляют собой несамоходные железнодорожные транспортные средства, не содержат никакого бортового двигателя и часто не имеют никакой подачи питания.
Выражение «устройство с ручным управлением» относится к любому типу рукоятки, подходящей для управления оператором вручную. К примерам таких устройств с ручным управлением относятся тормозное колесо, тормозной рычаг или тормозной переключатель.
Железнодорожные вагоны, как правило, снабжены ручными тормозами, которые могут быть задействованы или сцеплены, когда вагоны содержатся на железнодорожной сортировочной станции. Иногда оператор забывает расцепить ручной тормоз, и железнодорожный вагон тянется при все еще сцепленном ручном тормозе. При сцепленном ручном тормозе вагонные колеса в большей степени скользят, чем катятся. Это может привести к возникновению на колесах плоского участка и/или к поломке тормозных колодок. Уплощенное колесо с плохой формой больше не будет поворачиваться и будет вызывать вибрации и создавать опасность схода с рельсов вследствие своей неправильной формы на рельсах. Таким образом, каждое колесо железнодорожного вагона должно шлифоваться и обтачиваться каждые 100000 км и должно заменяться вместе с осью каждые 1000000 км вследствие того, что два колеса и ось изготовлены из единой металлической заготовки.
Ряд вариантов выполнения данного изобретения обеспечивает владельцу вагона преимущество, заключающееся в контроле состояния расцепления ручного тормоза в вагоне, что предотвращает опасность получения уплощенных колес или, что еще хуже, схода с рельсов железнодорожного вагона или всего состава.
Данное изобретение направлено на решение некоторых проблем, указанных выше при рассмотрении известных способов и систем. Изобретение также направлено на создание способа и системы контроля ручного тормоза, которые не основываются на механическом напряжении в ручном тормозе при определении состояния ручного тормоза. Кроме того, изобретение направлено на создание такого способа и системы контроля, которые не приводят к опасностям нарушения надлежащего функционирования ручного тормоза.
В контексте данного изобретения система контроля относится ко всем устройствам и контурам, физически присоединенным к железнодорожному вагону. Система контроля может сообщаться с устройством, являющимся внешним для железнодорожного вагона. Примерами такого «внешнего устройства» являются сервер, например, для удаленного контроля, и считывающее устройство, например, для приема данных, собранных системой контроля.
В контексте данного изобретения аббревиатура «GNSS» относится к спутниковой системе глобальной навигации, такой как GPS (глобальная локационная система), ГЛОНАСС (Глобальная навигационная спутниковая система), Galileo, BeiDou и т.д.
В данном документе говорится, что детекторный элемент является «прикрепленным с возможностью отсоединения» или «выполненным с возможностью разъемного прикрепления», в том случае, если он может быть легко демонтирован и установлен повторно согласно некой простой и заранее определенной процедуре. Это может относиться, например, к использованию съемной наклейки, удаляемого клея или одного или двух винтов.
В контексте данного изобретения ручной тормоз содержит тормозную рычажную систему, содержащую все компоненты ручного тормоза, которые подвергаются смещению относительно рамы при сцеплении или расцеплении ручного тормоза.
В данном документе детекторный элемент относится к элементу, принадлежащему модулю обнаружения. Детекторный элемент может содержать датчик, такой как герконовый переключатель или оптический детектор, или обнаруживаемый элемент, такой как магнит или оптически обнаруживаемую метку. Детекторный элемент может содержать любое количество и любую комбинацию датчиков и обнаруживаемых элементов.
Герконовый переключатель представляет собой электрический переключатель, управляемый путем приложения магнитного поля и содержащий по меньшей мере пару контактов. Обычно контакты находятся в первом положении, которое в данном случае называется не намагниченным положением, но при наличии магнитного поля переключаются во второе положение, которое в данном случае называется намагниченным положением. В предпочтительном варианте выполнения контакты нормально разомкнуты (не намагниченное положение), но замыкаются при наличии магнитного поля (намагниченное положение). В альтернативном варианте выполнения контакты нормально замкнуты (не намагниченное положение), но размыкаются при наличии магнитного поля (намагниченное положение). В соответствии с предпочтительным вариантом выполнения положение переключается под действием магнитного поля, создаваемого куском ферромагнитного материала, например постоянным магнитом. Когда постоянный магнит находится достаточно близко к герконовому переключателю для переключения указанного переключателя во второе положение, говорится, что постоянный магнит и герконовый переключатель находятся в пределах радиусов действия друг друга. В противном случае говорится, что постоянный магнит и герконовый переключатель находятся за пределами радиусов действия друг друга. Таким образом, герконовый переключатель действует в качестве датчика, способного обнаруживать, находится ли магнит вблизи него или нет. При этом говорится, что и герконовый переключатель, и магнит являются детекторными элементами. Соответственно, в данном документе оптический детектор действует в качестве датчика оптически обнаруживаемой метки, при этом как оптический детектор, так и оптически обнаруживаемая метка являются детекторными элементами.
В соответствии с несколькими аспектами, указанными в разделе «Сущность изобретения», в данном изобретении предложены способ, железнодорожный вагон, контролирующая система и набор. Специалисту в данной области техники должно быть понятно, что указанная система может быть выполнена с возможностью выполнения этапов, эквивалентных этапам, входящим в предложенный способ. Кроме того, специалисту в данной области техники должно быть понятно, что система и железнодорожный вагон согласно данному изобретению оборудованы таким образом, чтобы обеспечить возможность реализации способа согласно изобретению. Таким образом, в данном документе не делается различия между различными аспектами данного изобретения, и каждый раскрываемый элемент может относиться к каждому из различных аспектов данного изобретения.
В первом аспекте данного изобретения предложен способ контроля ручного тормоза по пункту 1 формулы изобретения.
В одном предпочтительном варианте выполнения по меньшей мере один из первого и второго детекторных элементов прикреплен с возможностью отсоединения или выполнен с возможностью разъемного прикрепления, например, при помощи съемной наклейки, удаляемого клея или одного или двух винтов. В более предпочтительном варианте выполнения второй детекторный элемент прикреплен с возможностью отсоединения. В наиболее предпочтительном варианте те детекторные элементы, которые представляют собой беспроводные пассивные элементы, предпочтительно второй детекторный элемент, прикреплен с возможностью отсоединения. Это обеспечивает преимущество, заключающееся в том, что та часть системы контроля тормоза, на которой установлен детекторный элемент, может быть легко очищена, обработана или заменена при оказании на систему контроля лишь ограниченного воздействия. В вариантах выполнения, в которых детекторный элемент, прикрепленный с возможностью отсоединения, представляет собой беспроводной элемент или предпочтительно беспроводной пассивный элемент, например простой магнит, из него не выходит никаких проводов, что обеспечивает легкую установку и демонтаж детекторного элемента. Соответственно, система контроля может быть легко откалибрована или откалибрована повторно путем повторного позиционирования одного из детекторных элементов, который прикреплен с возможностью отсоединения. В другом варианте выполнения, в котором каждый из детекторных элементов является беспроводным, каждый детекторный элемент может предпочтительно быть прикреплен с возможностью отсоединения. Это может значительно уменьшить трудности и/или затраты, связанные с техническим обслуживанием.
В предпочтительном варианте выполнения один из указанных первого и второго детекторных элементов представляет собой беспроводной пассивный элемент, выполненный с возможностью обнаружения другим из указанных первого и второго детекторных элементов, причем указанный другой элемент представляет собой активный детекторный элемент, выполненный с возможностью обнаружения указанного пассивного детекторного элемента, при этом предпочтительно указанный пассивный детекторный элемент представляет собой указанный излучающий детекторный элемент, а указанный активный детекторный элемент представляет собой указанный принимающий детекторный элемент. Это является преимущественным, в частности, потому что обеспечивает устранение необходимости в проводах, что облегчает прикрепление пассивного детекторного элемента к тормозной рычажной системе.
В другом предпочтительном варианте выполнения, который предпочтительно комбинируется с выполнением указанного второго детекторного элемента в виде пассивного беспроводного детекторного элемента, по меньшей мере указанный второй детекторный элемент прикреплен с возможностью отсоединения, при этом максимальный размер L указанного пассивного детекторного элемента составляет менее 60 мм, предпочтительно менее 50 мм, предпочтительнее менее 40 мм и наиболее предпочтительно менее 30 мм. Это обеспечивает компактную и удобную для пользователя конструкцию, в которой второй детекторный элемент может быть легко удален для технического обслуживания и/или легко повторно установлен во время калибровки.
В другом предпочтительном варианте выполнения указанный железнодорожный вагон представляет собой несамоходный железнодорожный вагон, причем каждый детекторный элемент из указанных первого и второго детекторных элементов, содержащихся в указанном модуле обнаружения, является беспроводным и предпочтительно выполнен с возможностью разъемного прикрепления, при этом указанный активный детекторный элемент представляет собой детекторный элемент с питанием от электрической батареи, содержащий средства обнаружения для обнаружения указанного пассивного детекторного элемента и беспроводной модульный интерфейс для ближней передачи данных, при этом указанный беспроводной модульный интерфейс используется для передачи указанного состояния в указанный модуль контроля на этапе (b). Такой вариант выполнения обеспечивает преимущество, заключающееся в решении проблемы отсутствия электричества в железнодорожном вагоне, и в то же время обеспечивает легкую установку и демонтаж во время технического обслуживания и простоту использования без кабелей, выходящих из детекторных элементов.
В еще одном варианте выполнения указанные первый и второй детекторные элементы находятся в пределах радиусов действия друг друга, если расстояние между ними меньше максимального значения R1 радиуса, которое составляет менее 80 мм, предпочтительно менее 50 мм, предпочтительнее менее 30 мм. Такое малое значение R1 радиуса является преимущественным, поскольку приводит к высокой интенсивности обнаруживаемого сигнала, обеспечивая точное функционирование и/или простую реализацию детекторных элементов.
В предпочтительном варианте выполнения данного изобретения второй детекторный элемент ограничен по существу линейным перемещением относительно рамы во время сцепления и расцепления указанного ручного тормоза. Преимущество такого варианта выполнения заключается в облегчении контроля смещения тормозной рычажной системы, что приводит к простому и точному контролю. На практике во многих системах ручного тормоза, таких как представленные в нижеописанных примерах, поддерживается такое предпочтительное позиционирование детекторного элемента. В этом заключается отличие от ряда известных систем, используемых для обнаружения перемещения цепи, принадлежащей системе ручного тормоза. Цепь не придерживается простого линейного перемещения относительно рамы, а вместо этого следует по непредсказуемой траектории, в результате чего требуется наличие сложной контролирующей системы, предрасположенной к ошибкам.
В соответствующем предпочтительном варианте выполнения по существу линейное перемещение указанного второго детекторного элемента относительно рамы включает направление указанного элемента вдоль вала, при этом указанный вал предпочтительно принадлежит винтовому приводу и, таким образом, имеет винтовую резьбу. Наличие такого вала также является преимущественным, поскольку обеспечивает возможность простого и точного контроля в отношении перемещения, которое является существенно линейным и потому легко контролируемым. На практике многие системы ручного тормоза, такие как представленные в нижеописанных примерах, содержат такой вал.
В предпочтительном варианте выполнения модуль контроля содержит коммуникационный интерфейс, предпочтительно спутниковый коммуникационный интерфейс, при этом указанный способ включает дополнительный этап (d), относящийся к передаче указанного состояния на удаленный сервер с помощью указанного коммуникационного интерфейса. Преимущество этого заключается в том, что информация по контролю становится доступна удаленно, что обеспечивает ее доступность для операторов потенциально по всему миру. Это является преимущественным с точки зрения железнодорожной безопасности и железнодорожного управления.
В предпочтительном варианте выполнения указанный модуль контроля содержит датчик перемещения для обнаружения движения указанного несамоходного железнодорожного вагона, при этом обнаружение не расцепленного состояния ручного тормоза в комбинации с обнаружением движения является причиной для выработки предупреждающего сигнала для оператора, причем указанный предупреждающий сигнал предпочтительно представляет собой звуковой предупреждающий сигнал на несамоходном железнодорожном вагоне и, опционально, содержит уведомление об опасности, предназначенное для передачи на удаленный сервер. Такой звуковой предупреждающий сигнал является преимущественным, поскольку помогает предупредить оператора, что способствует предотвращению нежелательной ситуации, при которой вагон состава тянется при сцепленном ручном тормозе. Кроме того, доступное извне уведомление об опасности является преимущественным, поскольку повышает железнодорожную безопасность и качество железнодорожного управления в целом. В соответствующем варианте выполнения указанный датчик перемещения содержит приемник спутниковой системы глобальной навигации (GNSS) и/или акселерометр. Использование GNSS может быть преимущественным вследствие ее высокой доступности и высокого уровня детализации, что не только дает информацию о том, движется железнодорожный вагон или нет, но также позволяет установить его местоположение. В предпочтительном варианте выполнения указанное местоположение также контролируется при помощи контролирующей системы согласно изобретению. Использование акселерометра может быть преимущественным вследствие его простоты, дешевизны и общей надежности в качестве средства контроля того, находится ли железнодорожный вагон в неподвижном состоянии или нет.
В другом предпочтительном варианте выполнения указанный модуль обнаружения дополнительно содержит третий детекторный элемент, зафиксированный относительно рамы, при этом указанное состояние дополнительно характеризует расцепление ручного тормоза, и при оценивании указанного состояния определяют, находятся ли указанные второй и третий детекторные элементы в пределах радиусов действия друг друга, с обнаружением тем самым сцепления ручного тормоза, при этом предпочтительно указанные второй и третий детекторные элементы находятся в пределах радиусов действия друг друга, если расстояние между ними меньше второго максимального значения R2 радиуса, которое составляет менее 100 мм, предпочтительно менее 80 мм и предпочтительнее менее 60 мм, при этом второе максимальное значение R2 радиуса предпочтительно больше указанного максимального значения R1 радиуса. Преимущество такого варианта выполнения заключается в обеспечении возможности контроля как состояния сцепления, так и расцепления, что приводит к более точному и/или более надежному контролю. В соответствующем варианте выполнения это приводит к повышенной точности определения точного состояния ручного тормоза, что обеспечивает возможность количественной оценки уровня, до которого расцеплен ручной тормоз, а не только определения состояния полного сцепления и полного расцепления. В другом соответствующем варианте выполнения это приводит к дублированию контроля и, как следствие, повышенной надежности. В данном случае дублирование заключается в том, что при наблюдении состояния полного расцепления при помощи первого детектора и второго детектора оно должно дополняться (дублирующим) контролем при помощи второго детектора и третьего детектора, которые должны подтвердить правильность наблюдения. Кроме того, малые значения R1 и R2 приводят к высокой интенсивности обнаруживаемого сигнала, обеспечивая точное функционирование и/или простую реализацию детекторных элементов. При этом может быть предпочтительным установить значение R2 больше, чем R1. Поскольку R2 относится к обнаружению сцепления ручного тормоза, R2 должно превышать R1, так как точное положение сцепления может варьироваться вследствие износа тормоза и сопутствующих факторов, тогда как R1 относится к отсутствию расцепления ручного тормоза, что приводит к более предсказуемому положению для соответствующего детекторного элемента.
В другом предпочтительном варианте выполнения модуль обнаружения содержит первую пару детекторных элементов, содержащую указанные первый и второй детекторные элементы, и, опционально, вторую пару детекторных элементов, содержащую указанные третий и второй детекторные элементы, причем первый элемент в каждой паре содержит герконовый переключатель, а второй элемент в каждой паре содержит магнит, при этом указанное определение того, находятся ли первый и второй детекторные элементы в пределах радиусов действия друг друга, и, опционально, указанное определение того, находятся ли второй и третий детекторные элементы в пределах радиусов действия друг друга, включают определение намагничивания указанного герконового переключателя вследствие близости указанного магнита с обнаружением тем самым соответственно расцепления и, опционально, сцепления ручного тормоза. При этом следует отметить, что это охватывает различные варианты выполнения, такие как варианты выполнения с одним герконовым переключателем (содержащимся во втором детекторном элементе) и двумя магнитами, а также варианты выполнения с двумя герконовыми переключателями (содержащимися в первом детекторном элементе и третьем детекторном элементе) и одним магнитом. Преимущество варианта выполнения с герконовым переключателем и магнитом заключается в том, что он является дешевым и надежным и, как правило, гораздо более дешевым, чем устройство для измерения механического напряжения. Кроме того, замена основного компонента, например герконового переключателя или магнита, является, как правило, более дешевой и простой, чем замена компонента для измерения механического напряжения.
В еще одном варианте выполнения данного изобретения модуль обнаружения содержит первую пару детекторных элементов, содержащую указанные первый и второй детекторные элементы, и, опционально, вторую пару детекторных элементов, содержащую указанные третий и второй детекторные элементы, причем первый элемент в каждой паре содержит оптический датчик, а второй элемент в каждой паре содержит оптически обнаруживаемую метку, при этом указанное определение того, находятся ли первый и второй детекторные элементы в пределах радиусов действия друг друга, и, опционально, указанное определение того, находятся ли второй и третий детекторные элементы в пределах радиусов действия друг друга, включают определение обнаружения указанной оптически обнаруживаемой метки указанным оптическим датчиком с обнаружением тем самым соответственно расцепления и, опционально, сцепления ручного тормоза. При этом следует отметить, что это охватывает различные вариантов выполнения, такие как варианты выполнения с одним оптическим датчиком (содержащимся во втором детекторном элементе) и одним или двумя магнитами, а также варианты выполнения с двумя оптическими датчиками (содержащимися в первом и третьем детекторных элементах) и одним магнитом. Преимущества варианта выполнения с оптическим датчиком и оптически обнаруживаемой меткой аналогичны преимуществам варианта выполнения с герконовым переключателем и магнитом. В возможном варианте выполнения имеет место комбинация из герконового переключателя, магнита, оптического датчика и оптически обнаруживаемой метки. Преимущество такой комбинации заключается в повышенной точности и/или дублировании, которое обеспечивает большую надежность. В соответствующем предпочтительном варианте выполнения указанные одна или более оптически обнаруживаемых меток относятся к герконовому переключателю и/или магниту.
В предпочтительном варианте выполнения модуль обнаружения содержит по меньшей мере один детекторный элемент с питанием от электрической батареи, содержащий беспроводной модульный интерфейс для ближней передачи данных, при этом указанный беспроводной модульный интерфейс используется для передачи указанного состояния в указанный модуль контроля на этапе (b). Это обеспечивает преимущество, заключающееся в исключении использования проводов вблизи тормозной системы, которая все-таки является неблагоприятной средой, в которой при отсутствии защиты провода могут быть легко повреждены.
В предпочтительном варианте выполнения изобретение включает указанный этап (с), относящийся к сохранению указанного состояния и предпочтительно временной отметки в указанной памяти модуля контроля, причем указанная контролирующая система (30) содержит по меньшей мере один беспроводной интерфейс системы для ближней передачи данных, который используется для передачи указанного состояния и, опционально, указанной временной метки в считывающее устройство. При этом считывающее устройство действует в качестве внешнего устройства. Обмен данными между контролирующей системой и считывающим устройством может осуществляться при помощи известного беспроводного протокола/технологии, такого как Bluetooth, RFID (радиочастотная идентификация), Zigbee, WiFi и т.д. Преимущество такого варианта выполнения заключается в обеспечении удобного подхода к контролю.
- Во время использования железнодорожного вагона контролирующая система собирает и накапливает данные, относящиеся к контролируемому ручному тормозу.
- Во время периодических проверок или после возникновения проблемы, связанной с железнодорожным вагоном, оператор считывает указанные данные при помощи считывающего устройства.
Такой контроль является преимущественным, поскольку предотвращает проблемы, связанные с ручным тормозом, и помогает выявлять основные причины в случае небольших проблем и/или аварий, таких как сход с рельсов.
В предпочтительном варианте выполнения данного изобретения модуль обнаружения содержит, помимо первого датчика и первого обнаруживаемого объекта, такого как магнит или оптически обнаруживаемая метка, также второй датчик и/или второй обнаруживаемый объект.
- В первом наборе вариантов выполнения модуль обнаружения содержит один датчик в комбинации с первым обнаруживаемым элементом и вторым обнаруживаемым элементом, такими как первый и второй магниты или первая и вторая оптически обнаруживаемые метки.
 В предпочтительном варианте выполнения первый и второй обнаруживаемые элементы установлены на раме. Единственный датчик установлен на тормозной рычажной системе. При этом детекторные элементы размещены относительно друг друга с обеспечением надежного контроля. В данном случае это подразумевает установку первого и второго обнаруживаемых элементов вблизи тормозной рычажной системы и вблизи друг друга. Кроме того, первый обнаруживаемый элемент установлен на перекладине или другой части рамы таким образом, что он находится в пределах радиуса действия единственного датчика при (полном) расцеплении ручного тормоза. Второй обнаруживаемый элемент установлен на раме таким образом, что он находится в пределах радиуса действия единственного датчика при сцеплении ручного тормоза. В другом предпочтительном варианте выполнения тормозная рычажная система содержит тормозной рычаг и трансмиссию, при этом единственный датчик установлен на трансмиссии. В альтернативном варианте выполнения указанный единственный датчик установлен на тормозном рычаге.
В предпочтительном варианте выполнения первый и второй обнаруживаемые элементы установлены на раме. Единственный датчик установлен на тормозной рычажной системе. При этом детекторные элементы размещены относительно друг друга с обеспечением надежного контроля. В данном случае это подразумевает установку первого и второго обнаруживаемых элементов вблизи тормозной рычажной системы и вблизи друг друга. Кроме того, первый обнаруживаемый элемент установлен на перекладине или другой части рамы таким образом, что он находится в пределах радиуса действия единственного датчика при (полном) расцеплении ручного тормоза. Второй обнаруживаемый элемент установлен на раме таким образом, что он находится в пределах радиуса действия единственного датчика при сцеплении ручного тормоза. В другом предпочтительном варианте выполнения тормозная рычажная система содержит тормозной рычаг и трансмиссию, при этом единственный датчик установлен на трансмиссии. В альтернативном варианте выполнения указанный единственный датчик установлен на тормозном рычаге.
В другом соответствующем варианте выполнения первый и второй обнаруживаемые элементы установлены на тормозной рычажной системе, при этом, например, первый элемент установлен на трансмиссии, а второй элемент установлен на тормозном рычаге. Единственный датчик установлен на раме. Кроме того, в этом случае детекторные элементы размещены относительно друг друга с обеспечением надежного контроля.
- Во втором наборе вариантов выполнения модуль обнаружения содержит первый и второй датчики в комбинации с одним обнаруживаемым элементом.
В предпочтительном варианте выполнения первый и второй датчики установлены на раме, а единственный обнаруживаемый элемент установлен на тормозной рычажной системе.
В другом соответствующем варианте выполнения первый и второй датчики установлены на тормозной рычажной системе, а единственный обнаруживаемый элемент установлен на раме.
В каждом варианте выполнения детекторные элементы размещены относительно друг друга с обеспечением надежного контроля.
В соответствии с еще одним вариантом выполнения данного изобретения модуль обнаружения содержит четыре или более детекторных элементов, установленных на тормозной рычажной системе и/или шасси или вблизи них. Это обеспечивает более точный и/или более надежный контроль.
В другом аспекте изобретения предложен способ контроля ручного тормоза по меньшей мере одного несамоходного железнодорожного вагона, содержащего раму, с помощью контролирующей системы, причем указанный ручной тормоз содержит механическое устройство с ручным управлением, тормозную рычажную систему и по меньшей мере одну тормозную колодку, причем указанное механическое устройство, указанная тормозная рычажная система и указанная по меньшей мере одна тормозная колодка механически соединены, при этом контролирующая система содержит модуль обнаружения и модуль контроля, причем указанный модуль обнаружения содержит по меньшей мере один детекторный элемент, а указанный модуль контроля содержит процессор, материальную энергонезависимую память и команды в указанной памяти для инструктирования указанного процессора, при этом способ включает последовательные этапы, на которых:
(a) оценивают состояние указанного ручного тормоза, принадлежащего указанному по меньшей мере одному несамоходному железнодорожному вагону, с помощью указанного модуля обнаружения,
(b) передают указанное состояние в указанный модуль контроля,
(c) опционально, сохраняют указанное состояние и предпочтительно временную метку в указанной памяти модуля контроля,
отличающийся тем, что при оценивании указанного состояния смещают тормозную рычажную систему относительно калибровочной точки, зафиксированной относительно рамы, при этом указанное состояние характеризует по меньшей мере расцепление ручного тормоза.
Ключевым преимуществом такого способа и соответствующих способов согласно данному изобретению является точный, надежный и устойчивый контроль состояния расцепления ручного тормоза вагона, что предотвращает опасную ситуацию, при которой оператор забывает расцепить ручной тормоз и железнодорожный вагон тянется при все еще сцепленном ручном тормозе. Благодаря предотвращению этой ситуации изобретение способствует помогает предотвращать повреждения, связанные с ручным тормозом, таким как уплощение колес, и, что важно, помогает предотвращать сход железнодорожного вагона или всего состава с рельсов из-за уплощенных колес. В некоторых вариантах выполнения данного изобретения предусмотрена подача оператору звукового тревожного сигнала при возникновении такой ситуации.
Указанный способ является точным, надежным и устойчивым, поскольку основывается на смещении тормозной рычажной системы относительно калибровочной точки, а не на механическом напряжении в указанной системе. Известные системы и способы, основанные на измерении механического напряжения, являются неточными, поскольку точное механическое напряжение, возникающее в ручном тормозе, зависит от многих факторов окружающей среды, таких как температура и влажность, и может увеличиваться с течением времени вследствие износа ручного тормоза. Кроме того, измерение механического напряжения требует возможности отведения усилия из ручного тормоза, что приводит к чрезмерно сложному и/или неточному контролю и может даже нарушить надлежащее функционирование ручного тормоза в случае проблем с контролирующим механизмом/системой. В отличие от этого, взятие за основу смещения тормозной рычажной системы приводит к более точному и устойчивому измерению, в частности, вследствие того, что многие обычные ручные тормоза содержат компоненты, которые перемещаются по существу линейно относительно железнодорожного вагона, на котором установлен ручной тормоз. Таким образом, данное изобретение относится к ряду простых и изящных вариантов выполнения, в которых сцепление и расцепление тормоза сводится к линейному перемещению компонента ручного тормоза, состояние которого может быть легко отслежено при помощи только одного или нескольких детекторных элементов. Взятие за основу смещения тормозной рычажной системы также обеспечивает более безопасный контроль, поскольку отсутствует необходимость в отведении какого-либо механического напряжения от ручного тормоза, что минимизирует риск нарушения функционирования ручного тормоза из-за проблемы в контролирующей системе.
Другое преимущество данного изобретения заключается в том, что оно является особенно устойчивым к износу системы ручного тормоза. Действительно, износ тормозных колодок приводит возникновению отклонений с течением времени как в механическом напряжении в тормозной рычажной системе, так и в ее смещении во время сцепления ручного тормоза. В отличие от этого, независимо от уровня износа тормозных колодок, смещение тормозной рычажной системы при полном открытии ручного тормоза остается в большей степени одинаковым на протяжении всего срока службы ручного тормоза. Таким образом, если сосредоточить внимание на расцеплении ручных тормозов, а не на сцеплении, данное изобретение обеспечивает гораздо более надежное решение проблемы контроля ручного тормоза, чем известные системы и способы. При этом следует отметить, что для предотвращения тяги вагона состава при сцепленных ручных тормозах фактически рекомендуется сосредоточить внимание на состоянии полного расцепления, поскольку это состояние является единственным состоянием, гарантирующим отсутствие нанесения какого-либо вреда железнодорожному вагону. Известные системы, в которых внимание уделено только сцеплению ручных тормозов, могут оказаться неспособны идентифицировать состояние частичного сцепления. Такие системы могут быть полезны при предотвращении опасной ситуации, в которой в оставленном без присмотра железнодорожном вагоне ручные тормоза не полностью сцеплены, но они неспособны предотвратить ситуацию, в которой происходит тяга вагона состава с частично сцепленными ручными тормозами. В отличие от этого, данное изобретение полностью подходит для управления также и последней ситуацией.
В предпочтительном варианте выполнения указанный модуль обнаружения содержит первый детекторный элемент, зафиксированный относительно рамы, и второй детекторный элемент, зафиксированный относительно части тормозной рычажной системы, причем указанный первый детекторный элемент определяет указанную калибровочную точку, и при оценивании указанного состояния определяют, находятся ли указанные первый и второй детекторные элементы в пределах радиусов действия друг друга, с обнаружением тем самым сцепления ручного тормоза. Это обеспечивает преимущество, заключающееся в получении четкой и компактной реализации, в которой требуется контролировать только две отдельные точки, а не всю тормозную рычажную систему.
В другом аспекте данного изобретения предложен несамоходный железнодорожный вагон, содержащий контролирующую систему для контроля ручного тормоза указанного вагона, при этом указанный несамоходный железнодорожный вагон содержит раму, указанный ручной тормоз содержит механическое устройство с ручным управлением, тормозную рычажную систему и по меньшей мере одну тормозную колодку, причем указанное механическое устройство, указанная тормозная рычажная система и указанная по меньшей мере одна тормозная колодка механически соединены, при этом указанная контролирующая система содержит модуль обнаружения и модуль контроля, причем указанный модуль обнаружения содержит по меньшей мере один детекторный элемент, а указанный модуль контроля содержит процессор, материальную энергонезависимую память и команды в указанной памяти для инструктирования указанного процессора, при этом контролирующая система выполнена с возможностью осуществления последовательных этапов, на которых:
- оценивают состояние указанного ручного тормоза несамоходного железнодорожного вагона с помощью указанного модуля обнаружения,
- передают указанное состояние в указанный модуль контроля,
- опционально, сохраняют указанное состояние и предпочтительно временную отметку в указанной памяти модуля контроля,
отличающийся тем, что при оценивании указанного состояния тормозная рычажная система смещается относительно калибровочной точки, зафиксированной относительно рамы, при этом указанное состояние характеризует по меньшей мере расцепление ручного тормоза.
В другом аспекте данного изобретения предложена контролирующая система для контроля ручного тормоза по меньшей мере одного несамоходного железнодорожного вагона согласно данному изобретению, причем указанная контролирующая система предназначена для осуществления способа согласно данному изобретению.
В другом аспекте данного изобретения предложен набор для контроля ручного тормоза по меньшей мере одного несамоходного железнодорожного вагона в соответствии со способом согласно данному изобретению, при этом несамоходный железнодорожный вагон содержит раму, ручной тормоз содержит механическое устройство с ручным управлением, тормозную рычажную систему и по меньшей мере одну тормозную колодку, причем указанное механическое устройство, указанная тормозная рычажная система и указанная по меньшей мере одна тормозная колодка механически соединены, при этом указанный набор содержит:
- модуль обнаружения, содержащий по меньшей мере первый детекторный элемент для оценивания состояния ручного тормоза, принадлежащего указанному по меньшей мере одному вагону, причем при оценивании указанного состояния тормозная рычажная система смещается относительно калибровочной точки, зафиксированной относительно рамы, при этом указанное состояние характеризует по меньшей мере расцепление ручного тормоза,
- модуль контроля, выполненный с возможностью приема указанного состояния, характеризующего по меньшей мере расцепление ручного тормоза, и с возможностью передачи указанного состояния во внешнее устройство.
Преимущества такого несамоходного железнодорожного вагона, такой контролирующей системы и такого набора предпочтительно относятся к настоящему изобретению. Кроме того, такой набор является преимущественным с точки зрения того, что он может быть легко использован для установки контролирующей системы на имеющемся железнодорожном вагоне с предварительно установленным ручным тормозом.
Изобретение описано более подробно при помощи нижеследующих неограничивающих примеров, которые дополнительно иллюстрируют изобретение и никоим образом не ограничивают и не должны считаться ограничивающими объем изобретения.
Примеры
Пример 1: Железнодорожный вагон с контролируемым ручным тормозом - два детекторных элемента
Пример 1 изображен на фиг. 1 и 2. На фиг. 1 изображен железнодорожный вагон, снабженный контролирующей системой 30 согласно изобретению. На фиг. 2 изображен увеличенный вид нижней части 200 железнодорожного вагона с контролирующей системой, содержащей два детекторных элемента (33, 34). Железнодорожный вагон 10 содержит ручной тормоз 1, раму 11 и колеса 13, с одной тележкой 11 на два колеса 13.
Ручной тормоз 1 содержит тормозную рычажную систему 20 и одну или более тормозных колодок 3. Кроме того, ручной тормоз содержит вал 5, поворотный рычаг 4 и запястный шарнир 7. Вал 5 принадлежит винтовому приводу и, таким образом, имеет винтовую резьбу. Тормозная рычажная система 20 содержит тормозной рычаг 2 и трансмиссию 8. Трансмиссия 8, содержащая кольцевую часть, установлена на валу 5 и имеет винтовую резьбу внутри своей кольцевой части для обеспечения возможности перемещения трансмиссии 8 вперед и назад по валу 5. Вал 5, запястный шарнир 7 и поворотный рычаг 4 соединены таким образом, что поворотное перемещение рычага 4 преобразуется через шарнир 7 в пропорциональное поворотное перемещение вала 5. Трансмиссия 8 между валом 5 и тормозным рычагом 2 выполнена так, что поворотное перемещение рычага с винтовой резьбой преобразуется через трансмиссию 8 в линейное поступательное перемещение тормозного рычага 2, что обеспечивает возможность сцепления или расцепления ручного тормоза 1. Ручной тормоз управляется вручную при помощи маховика 9. При этом поворот маховика 9 пропорционально переносится на поворотный рычаг 4.
Тормозной рычаг 2, трансмиссия 8 и вал 5 соединены таким образом, что линейное поступательное перемещение трансмиссии 8 в первом направлении приводит к сцеплению ручного тормоза 1, а линейное поступательное перемещение трансмиссии 8 во втором направлении, противоположном первому направлению, приводит к расцеплению ручного тормоза 1. В этом смысле ручной тормоз 1 выполнен с обеспечением ограничения перемещения трансмиссии 8 до простого линейного перемещения относительно рамы 11 железнодорожного вагона 10. По этой причине преимущественной является установка второго детекторного элемента 34 на данной трансмиссии 8, принадлежащей тормозной рычажной системе 20, с получением тем самым простой и предсказуемой траектории второго детекторного элемента во время работы ручного тормоза 1.
В примере 1 контролирующая система 30 содержит модуль 31 обнаружения, содержащий первый детекторный элемент 33 и второй детекторный элемент 34. Как первый детекторный элемент 33, так и второй детекторный элемент 34 предпочтительно являются беспроводными, то есть из детекторного элемента не выходят провода. Первый детекторный элемент 33 установлен непосредственно или опосредованно на раме 11 с обеспечением его фиксированного положения относительно рамы 11. В варианте выполнения, изображенном на фиг. 1 и 2, первый детекторный элемент 33 установлен на балке 6, принадлежащей раме 11. Второй детекторный элемент 34 установлен на тормозной рычажной системе 20. В варианте выполнения, изображенном на фиг. 1 и 2, второй детекторный элемент 34 установлен на трансмиссии 8, шарнирно соединенной с тормозным рычагом 2. Таким образом, второй детекторный элемент 34 зафиксирован относительно трансмиссии 8.
Контролирующая система 30 также содержит модуль 32 контроля, соединенный с указанным модулем 31 обнаружения.
Первый детекторный элемент 33 служит в качестве калибровочной точки и зафиксирован относительно рамы 11. Второй детекторный элемент
34 обеспечивает отсчетную точку для смещения тормозной рычажной системы 20. В предпочтительном варианте выполнения первый детекторный элемент 33 представляет собой датчик, в данном примере герконовый переключатель, предпочтительно беспроводной герконовый переключатель с питанием от батареи, содержащий беспроводной сетевой интерфейс, а второй детекторный элемент 34 представляет собой прикрепленный с возможностью отсоединения беспроводной пассивный детекторный элемент, например магнит. При оценивании наличия или отсутствия расцепления ручного тормоза контролируют смещение тормозной рычажной системы 20 относительно указанной калибровочной точки 33. Более конкретно, контролирующая система 30 определяет, находится ли магнит 34 в пределах радиуса действия герконового переключателя 33 или нет. При этом магнит 34 находится в пределах радиуса действия переключателя 33, если обнаруженное расстояние D (или, что эквивалентно, обнаруженный уровень сигнала) между ними меньше заданного максимального значения R1 радиуса. Это соответствует расцепленному ручному тормозу 1. И наоборот, магнит 34 находится вне радиуса действия переключателя 33, если обнаруженное расстояние D превышает указанное заданное максимальное значение R1 радиуса. Это соответствует ручному тормозу 1, который не расцеплен или сцеплен по меньшей мере частично. При этом расцепленное состояние соответствует «полному» расцеплению, при котором трансмиссия 8 завинчена до положения, максимально удаленного от поворотного рычага 4. Со ссылкой на фиг. 1 и 2 это соответствует самому левому положению для трансмиссии 8, при котором магнит 34 и трансмиссия 8 по существу выровнены с переключателем 33. Это следует отличать от действительного расцепления тормозных колодок и колес, которое происходит в случае полного расцепления, но может также возникать в случаях незначительного сцепления. Также со ссылкой на фиг. 1 и 2 последняя ситуация соответствует положениям магнита 34 и трансмиссии 8, которые не выровнены полностью с переключателем 33, а расположены по меньшей мере немного правее переключателя 33. В предпочтительном варианте выполнения только положение полного расцепления считается действительным положением, и даже положение только с незначительным сцеплением рассматривается как «не расцепленное» и может инициировать такие события, как звуковой предупреждающий сигнал или уведомление об опасности.
Второй детекторный элемент (34) прикреплен с возможностью отсоединения, что облегчает техническое обслуживание тормозной рычажной системы, а также обеспечивает возможность легкого повторного позиционирования во время калибровки контролирующей системы. Максимальный размер L, в данном примере длина, пассивного детекторного элемента составляет менее 60 мм, предпочтительно менее 40 мм.
Совместно первый и второй детекторные элементы (33, 34) и модуль контроля обеспечивают возможность точного контроля наличия или отсутствия расцепления ручного тормоза. В альтернативном варианте выполнения первый и второй детекторные элементы меняются ролями, при этом второй детекторный элемент 34 представляет собой датчик, предпочтительно герконовый переключатель, а первый детекторный элемент 33 представляет собой магнит.
Пример 2: Железнодорожный вагон с контролируемым ручным тормозом - три детекторных элемента
Пример 2 изображен на фиг. 1 и 3. Он относится к такому же железнодорожному вагону, как рассмотренный в примере 1, за исключением того, что имеется три детекторных элемента (33, 34, 35) вместо двух элементов (33, 34).
В примере 2 контролирующая система 30 содержит модуль 31 обнаружения, содержащий не только первый и второй детекторные элементы (33, 34), но также третий детекторный элемент 35. Вследствие наличия третьего детекторного элемента контролирующая система может контролировать не только факт расцепления ручного тормоза, но и факт сцепления ручного тормоза 1.
В предпочтительном варианте выполнения первый детекторный элемент 33 представляет собой первый герконовый переключатель, а второй детекторный элемент 34 представляет собой магнит, аналогично Примеру 1. Третий детекторный элемент 35 представляет собой второй герконовый переключатель, установленный на раме 11. Совместно с магнитом 34 второй переключатель 35 обеспечивает возможность контроля факта сцепления ручного тормоза 1. Это возможно благодаря определению того, находится ли магнит 34 в пределах радиуса действия второго переключателя 35. При этом магнит 34 находится в пределах радиуса действия второго переключателя 35, если обнаруженное расстояние Е (или, эквивалентно, обнаруженный уровень сигнала) между ними меньше второго заданного максимального значения R2 радиуса, которое предпочтительно равно максимальному значению R1 радиуса, относящемуся к первому переключателю 33, или превышает его. Это соответствует сцепленному ручному тормозу 1. И наоборот, магнит 34 находится вне радиуса действия переключателя 35, если обнаруженное расстояние Е превышает указанное второе заданное максимальное значение R2 радиуса. Это соответствует ручному тормозу 1, который не сцеплен или сцеплен по меньшей мере частично. Предпочтительно данное «суждение» выносится с учетом суждения, основанного на обнаружении магнита 34 первым герконовым переключателем 33, и в комбинации с указанным суждением. При этом контроль, выполняемый вторым переключателем 35, может дополнительно служить в качестве механизма проверки относительно контроля, выполняемого первым герконовым переключателем. В этом смысле добавление второго герконового переключателя может внести вклад в надежность контроля задачи первого герконового переключателя, то есть определения того, расцеплен ли ручной тормоз.
Совместно первый, второй и третий датчики (33, 34, 34) и модуль контроля обеспечивают возможность точного контроля того, расцеплен ли ручной тормоз. Кроме того, они также обеспечивают возможность контроля того, сцеплен ли ручной тормоз. В одном альтернативном варианте выполнения первый, второй и третий датчики (33, 34, 35) меняются ролями, при этом первый датчик и третий датчик представляют собой магниты, а второй датчик представляет собой (единственный) герконовый переключатель. Последний альтернативный вариант обеспечивает преимущество, заключающееся в сокращении количества компонентов с герконовым переключателем, необходимых для одного контролируемого ручного тормоза, с двух до одного. Это может быть преимущественным, поскольку уменьшает сложность и/или затраты на реализацию изобретения.
Предполагается, что данное изобретение не ограничено какой-либо вышеописанной формой реализации и что в представленный пример изготовления могут быть внесены некоторые изменения без переоценки прилагаемой формулы изобретения. Например, данное изобретение описано выше применительно к герконовым переключателям и оптическим датчикам в качестве некоторых детекторных элементов, однако очевидно, что изобретение также может применяться с другими типами детекторных элементов, такими как RFID устройства, лазерно-интерферометрические устройства или датчики Холла.


Данное изобретение относится к способу контроля ручного тормоза по меньшей мере одного железнодорожного вагона, предпочтительно несамоходного железнодорожного вагона, содержащего раму, с помощью контролирующей системы, при этом ручной тормоз содержит механическое устройство с ручным управлением, тормозную рычажную систему и по меньшей мере одну тормозную колодку, причем механическое устройство с ручным управлением, тормозная рычажная система и указанная по меньшей мере одна тормозная колодка механически соединены, при этом контролирующая система содержит модуль обнаружения и модуль контроля, причем модуль обнаружения содержит по меньшей мере один детекторный элемент, а модуль контроля содержит процессор, материальную энергонезависимую память и команды в памяти для инструктирования процессора, при этом способ включает ряд этапов. Технический результат – повышение точности контроля ручного тормоза, надежности, безопасности, простота обслуживания, установки и демонтажа, снижение затрат на реализацию способа контроля ручного тормоза. 4 н. и 11 з.п. ф-лы, 3 ил.
1. Способ контроля ручного тормоза (1) по меньшей мере одного железнодорожного вагона (10), предпочтительно по меньшей мере одного несамоходного железнодорожного вагона, содержащего раму (11), с помощью контролирующей системы (30), при этом указанный ручной тормоз (1) содержит механическое устройство (9) с ручным управлением, тормозную рычажную систему (20) и по меньшей мере одну тормозную колодку (3), причем указанное механическое устройство (9), указанная тормозная рычажная система (20) и указанная по меньшей мере одна тормозная колодка (3) механически соединены, при этом контролирующая система (30) содержит модуль (31) обнаружения и модуль (32) контроля, причем указанный модуль (31) обнаружения содержит по меньшей мере один детекторный элемент (33, 34, 35), а указанный модуль (32) контроля содержит процессор, материальную энергонезависимую память и команды в указанной памяти для инструктирования указанного процессора, при этом способ включает последовательные этапы, на которых:
(a) оценивают состояние указанного ручного тормоза (1), принадлежащего указанному по меньшей мере одному железнодорожному вагону (10), с помощью указанного модуля (31) обнаружения,
(b) передают указанное состояние в указанный модуль (32) контроля,
(c) предпочтительно сохраняют указанное состояние и предпочтительно временную отметку в указанной памяти модуля (32) контроля,
причем при оценивании указанного состояния смещают тормозную рычажную систему (20) относительно калибровочной точки (33, 35), зафиксированной относительно рамы (11), при этом указанное состояние характеризует по меньшей мере расцепление ручного тормоза (1), причем указанный модуль (31) обнаружения содержит первый детекторный элемент (33, 35), зафиксированный относительно рамы (11) и определяющий указанную калибровочную точку,
отличающийся тем, что модуль (31) обнаружения содержит второй детекторный элемент (34), зафиксированный относительно части тормозной рычажной системы (20), причем при оценивании указанного состояния определяют, находятся ли указанные первый детекторный элемент (33, 35) и второй детекторный элемент (34) в пределах радиусов действия друг друга, с обнаружением тем самым расцепления ручного тормоза (1), при этом предпочтительно по меньшей мере один из первого детекторного элемента (33, 35) и второго детекторного элемента (34) прикреплен с возможностью отсоединения,
причем указанные первый детекторный элемент (33, 35) и второй детекторный элемент (34) находятся в пределах радиусов действия друг друга, если расстояние (D, Е) между ними меньше максимального значения (R1) радиуса, которое составляет менее 80 мм.
2. Способ по п. 1, в котором один из указанных первого детекторного элемента (33, 35) и второго детекторного элемента (34) представляет собой излучающий детекторный элемент, выполненный с возможностью испускания сигнала, исходящего от указанного излучающего детекторного элемента, причем указанный сигнал предпочтительно представляет собой непрерывно испускаемый сигнал, а другой из указанных первого детекторного элемента (33, 35) и второго детекторного элемента (34) представляет собой принимающий детекторный элемент, выполненный с возможностью обнаружения указанного сигнала от излучающего детекторного элемента.
3. Способ по пп. 1-2, в котором один из указанных первого детекторного элемента (33, 35) и второго детекторного элемента (34) представляет собой беспроводной пассивный элемент, выполненный с возможностью его обнаружения другим из указанных первого детекторного элемента (33, 35) и второго детекторного элемента (34), причем указанный другой элемент из первого детекторного элемента (33, 35) и второго детекторного элемента (34) представляет собой активный детекторный элемент, выполненный с возможностью обнаружения указанного пассивного детекторного элемента, при этом предпочтительно пассивный детекторный элемент представляет собой указанный излучающий детекторный элемент, а активный детекторный элемент представляет собой указанный принимающий детекторный элемент.
4. Способ по пп. 1-3, в котором по меньшей мере указанный второй детекторный элемент (34) прикреплен с возможностью отсоединения и его максимальный размер (L) составляет менее 60 мм, предпочтительно менее 40 мм.
5. Способ по пп. 3-4, в котором железнодорожный вагон (10) представляет собой несамоходный железнодорожный вагон (10), причем каждый детекторный элемент из указанных первого детекторного элемента (33, 35) и второго детекторного элемента (34), содержащихся в указанном модуле (31) обнаружения, является беспроводным и предпочтительно выполнен с возможностью разъемного прикрепления, при этом указанный активный детекторный элемент представляет собой детекторный элемент с питанием от электрической батареи, содержащий средства обнаружения для обнаружения указанного пассивного детекторного элемента и беспроводной модульный интерфейс для ближней передачи данных, при этом указанный беспроводной модульный интерфейс используют для передачи указанного состояния в указанный модуль (32) контроля на этапе (b).
6. Способ по пп. 1-5, указанное максимальное значение (R1) радиуса составляет менее 50 мм, предпочтительно менее 30 мм.
7. Способ по пп. 1-6, в котором указанный второй детекторный элемент (34) ограничен по существу линейным перемещением относительно рамы (11) во время сцепления и расцепления ручного тормоза (1), причем указанное по существу линейное перемещение второго детекторного элемента (34) относительно рамы (11) предпочтительно включает направление указанного второго элемента (34) вдоль вала (5), при этом указанный вал (5) предпочтительно принадлежит винтовому приводу и, таким образом, имеет винтовую резьбу.
8. Способ по пп. 1-7, в котором модуль (32) контроля содержит коммуникационный интерфейс, предпочтительно спутниковый коммуникационный интерфейс, при этом способ включает дополнительный этап (d), относящийся к передаче указанного состояния на удаленный сервер с помощью указанного коммуникационного интерфейса.
9. Способ по п. 8, в котором модуль (32) контроля содержит датчик перемещения для обнаружения движения указанного железнодорожного вагона (10), при этом обнаружение не расцепленного состояния ручного тормоза (1) в комбинации с обнаружением движения является причиной для выработки предупреждающего сигнала и передачи указанного предупреждающего сигнала на указанный удаленный сервер с помощью указанного коммуникационного интерфейса, при этом указанный датчик перемещения предпочтительно содержит приемник спутниковой системы глобальной навигации и/или акселерометр.
10. Способ по пп. 1-9, в котором модуль (31) обнаружения содержит третий детекторный элемент (35), зафиксированный относительно рамы (11), при этом указанное состояние также характеризует сцепление ручного тормоза (1), и при оценивании указанного состояния определяют, находятся ли указанные второй детекторный элемент (34) и третий детекторный элемент (35) в пределах радиусов действия друг друга, с обнаружением тем самым сцепления ручного тормоза (1), при этом второй детекторный элемент (34) и третий детекторный элемент (35) находятся в пределах радиусов действия друг друга, если расстояние (Е) между ними меньше второго максимального значения (R2) радиуса, которое составляет менее 100 мм, предпочтительно менее 80 мм, предпочтительнее менее 60 мм, при этом второе максимальное значение (R2) радиуса предпочтительно больше указанного максимального значения (R1) радиуса.
11. Способ по пп. 1-10, в котором указанный модуль обнаружения содержит первую пару детекторных элементов, содержащую первый детекторный элемент (33) и второй детекторный элемент (34), и предпочтительно вторую пару детекторных элементов, содержащую второй детекторный элемент (34) и третий детекторный элемент (35), причем первый элемент в каждой паре содержит герконовый переключатель, а второй элемент в каждой паре содержит магнит, при этом указанное определение того, находятся ли первый детекторный элемент (33) и второй детекторный элемент (34) в пределах радиусов действия друг друга, и предпочтительно указанное определение того, находятся ли второй детекторный элемент (34) и третий детекторный элемент (35) в пределах радиусов действия друг друга, включают определение намагничивания указанного герконового переключателя вследствие близости указанного магнита с обнаружением тем самым соответственно расцепления и предпочтительно сцепления ручного тормоза (1).
12. Способ по пп. 1-11, в котором указанный модуль обнаружения содержит первую пару детекторных элементов, содержащую первый детекторный элемент (33) и второй детекторный элемент (34), и предпочтительно вторую пару детекторных элементов, содержащую второй детекторный элемент (34) и третий детекторный элемент (35), причем первый элемент в каждой паре содержит оптический датчик, а второй элемент в каждой паре содержит оптически обнаруживаемую метку, при этом указанное определение того, находятся ли первый детекторный элемент (33) и второй детекторный элемент (34) в пределах радиусов действия друг друга, и предпочтительно указанное определение того, находятся ли второй детекторный элемент (34) и третий детекторный элемент (35) в пределах радиусов действия друг друга, включают определение обнаружения указанной метки указанным оптическим датчиком с обнаружением тем самым соответственно расцепления и предпочтительно сцепления ручного тормоза (1).
13. Железнодорожный вагон (10), предпочтительно несамоходный железнодорожный вагон, содержащий контролирующую систему (30) для контроля ручного тормоза (1) указанного вагона (10), при этом указанный железнодорожный вагон (10) содержит раму (11), указанный ручной тормоз (1) содержит механическое устройство (9) с ручным управлением, тормозную рычажную систему (20) и по меньшей мере одну тормозную колодку (3), причем указанное механическое устройство (9), указанная тормозная рычажная система (20) и указанная по меньшей мере одна тормозная колодка (3) механически соединены, при этом указанная контролирующая система (30) содержит модуль (31) обнаружения и модуль (32) контроля, причем указанный модуль (31) обнаружения содержит по меньшей мере один детекторный элемент (33, 34, 35), а указанный модуль (32) контроля содержит процессор, материальную энергонезависимую память и команды в указанной памяти для инструктирования указанного процессора, при этом контролирующая система (30) выполнена с возможностью осуществления последовательных этапов, на которых:
- оценивают состояние указанного ручного тормоза (1) железнодорожного вагона (10) с помощью указанного модуля (31) обнаружения,
- передают указанное состояние в указанный модуль (32) контроля,
- предпочтительно сохраняют указанное состояние и предпочтительно временную отметку в указанной памяти модуля (32) контроля,
причем при оценивании указанного состояния тормозная рычажная система (20) смещается относительно калибровочной точки (33, 35), зафиксированной относительно рамы (11), при этом указанное состояние характеризует по меньшей мере расцепление ручного тормоза (1), указанный модуль (31) обнаружения содержит первый детекторный элемент (33, 35), зафиксированный относительно рамы (11) и определяющий указанную калибровочную точку,
отличающийся тем, что модуль (31) обнаружения содержит второй детекторный элемент (34), зафиксированный относительно части тормозной рычажной системы (20), причем при оценивании указанного состояния определяется, находятся ли указанные первый детекторный элемент (33, 35) и второй детекторный элемент (34) в пределах радиусов действия друг друга, с обнаружением тем самым расцепления ручного тормоза (1), при этом указанные первый детекторный элемент (33, 35) и второй детекторный элемент (34) находятся в пределах радиусов действия друг друга, если расстояние (D, Е) между ними меньше максимального значения (R1) радиуса, которое составляет менее 80 мм.
14. Контролирующая система (30) для контроля ручного тормоза (1) по меньшей мере одного железнодорожного вагона (10), предпочтительно несамоходного железнодорожного вагона, выполненного по п. 13, предназначенная для осуществления способа по любому из пп. 1-12.
15. Набор для контроля ручного тормоза (1) по меньшей мере одного железнодорожного вагона (10), предпочтительно несамоходного железнодорожного вагона, в соответствии со способом по любому из пп. 1-12, при этом железнодорожный вагон (10) содержит раму (11), ручной тормоз (1) содержит механическое устройство (9) с ручным управлением, тормозную рычажную систему (20) и по меньшей мере одну тормозную колодку (3), причем указанное механическое устройство (9), указанная тормозная рычажная система (20) и указанная по меньшей мере одна тормозная колодка (3) механически соединены, при этом указанный набор содержит:
- модуль (31) обнаружения, содержащий по меньшей мере первый детекторный элемент (33, 35) для оценивания состояния ручного тормоза (1), принадлежащего указанному по меньшей мере одному вагону (10), причем при оценивании указанного состояния тормозная рычажная система (20) смещается относительно калибровочной точки (33, 35), зафиксированной относительно рамы (11), при этом указанное состояние характеризует по меньшей мере расцепление ручного тормоза (1), причем первый детекторный элемент (33, 35) зафиксирован относительно рамы (11) и определяет указанную калибровочную точку, при этом модуль (31) обнаружения содержит второй детекторный элемент (34), зафиксированный относительно части тормозной рычажной системы (20), и при оценивании указанного состояния происходит определение того, находятся ли первый детекторный элемент (33, 35) и второй детекторный элемент (34) в пределах радиусов действия друг друга, с обнаружением тем самым расцепления ручного тормоза (1),
- модуль (32) контроля, выполненный с возможностью приема указанного состояния, характеризующего по меньшей мере расцепление ручного тормоза (1), и с возможностью передачи указанного состояния во внешнее устройство, предпочтительно на удаленный сервер.
| US 6006868 A, 28.12.1999 | |||
| US 2012046811 A1, 23.02.2012 | |||
| US 6170619 B1, 09.01.2001. |

