Изобретение относится к объемным машинам, предназначенным для работы со сжимаемыми средами (газами): вакуумным насосам, компрессорам.
Известна объемная роторная машина планетарного типа RU 2137943, содержащая два волнообразных центральных колеса, одно из которых (ротор) имеет внешние, а другое (статор) внутренние зубья, сопряженные с ними круглые плавающие сателлиты и торцовые стенки с каналами подвода и отвода рабочей среды. Центроида колеса с внешними зубьями имеет М=2 волны, а центроида колеса с внутренними зубьями - N=4 волны (соотношение чисел волн 2×4). При этом количество V плавающих сателлитов равно сумме чисел волн колес с внешними и внутренними зубьями, V=M+N=6. Рабочие камеры машины заключены между зубчатыми поверхностями центральных колес и сателлитов. Волны на центроидах плавные, соответствуют гармоническому закону изменения радиуса центроиды в полярных координатах. Недостатком такой объемной машины является малая величина отношения максимального и минимального объемов рабочих камер (около 3-х). Этого недостаточно для эффективной работы машины со сжимаемыми средами (газами). Тот же недостаток имеют известные машины с соотношением чисел волн 4×6 (US 6230823), 6×8 (US 6230823), 1×2 (SU 861734), 1×3 (DE 288340), 2×3 (WO 0166948), 3×4 (SU 1403993).
Известна RU 2513057 объемная роторная машина планетарного типа с числами волн M=N=1 (1×1). При гармоническом законе изменения радиуса центроид, число волн - одна волна - значит, что центральные колеса круглые, но установлены на своих осях с эксцентриситетом. Гармонический характер изменения радиуса центроид обуславливает невысокое значение отношения максимального и минимального объемов рабочих камер (3…4).
Для выполнения условия M=N необходимо, чтобы и число зубьев центральных колес с внешними и внутренними зубьями было одинаково. Это возможно только при использовании больших значений коэффициента смещения инструмента (Х=+10…15) при нарезании внутренних зубьев статора. Как следствие - большой угол зацепления (αw2=30…40°) в паре
сателлит-статор. В итоге появился новый недостаток - увеличенный угол давления в этой паре. Сказанное снижает нагрузочную способность зубьев и общую надежность работы механизма. Те же недостатки присутствуют и в схеме машины 2×2 (RU 144306).
Наиболее близкой по технической сущности предлагаемой конструкции (ее прототипом) является планетарная объемная роторная машина (RU 2687189). Эта машина состоит из n>1 последовательно соединенных секций, каждая из которых содержит вращающееся центральное колесо с внешними зубьями, центроида которого имеет М волн, неподвижное центральное колесо с внутренними зубьями, число волн центроиды которого равно N, а также взаимодействующие с центральными колесами плавающие сателлиты, неподвижные торцовые стенки и систему каналов подвода и отвода рабочей среды. Каналы отвода рабочей среды предыдущей секции соединены с каналами подвода последующей секции, а центральные колеса с внешними зубьями всех секций закреплены на общем валу. Центроиды центральных колес содержат соответственно М и N участков, являющихся окружностями максимального радиуса (Rmax), столько же участков, являющихся окружностями минимального радиуса (Rmin), и расположенные между ними участки, обеспечивающие плавный переход от Rmax к Rmin, при этом каналы подвода и отвода рабочей среды открыты в периоды прохождения сателлитами переходных участков. Угловая протяженность ΔR каждого участка центроиды с максимальным радиусом Rmax равна угловой протяженности участка центроиды с минимальным радиусом Rmin и составляет:
где G - число волн соответствующего центрального колеса (М или N).
Техническим результатом изобретения (RU 2687189) является достижение постоянного мгновенного расхода несжимаемой жидкости. Для работы на сжимаемых рабочих средах такая конструкция машины непригодна, так как, из-за наличия широких каналов, перекрывающих сателлит, не обеспечивает сжатие рабочей среды. Если абстрагироваться от формы каналов, и рассматривать только конфигурацию рабочих камер, то можно заметить, что наличие участков центроид с постоянными (максимальным Rmax и минимальным Rmin) радиусами существенно увеличивает значение отношения максимального объема рабочей камеры к минимальному по сравнению с аналогом, в котором центроиды характеризуются гармонической функцией. Однако в конструкции, известной по патенту (RU 2687189), это свойство механизма никак не используется. Недостатки, связанные с большим углом давления в кинематической паре сателлит-статор, в такой машине сохраняются. Под действием силы реакции зуба статора, сателлит, выбирая зазоры в зацеплениях, смещается в сторону ротора. Это дополнительно ухудшает условия передачи движения в кинематической паре сателлит-статор.
Техническая задача изобретения состоит в увеличении величины отношения максимального и минимального объемов рабочих камер и обеспечении постоянного плотного прижатия сателлита к статору.
Техническим результатом изобретения является повышение степени сжатия рабочей среды.
Предлагается планетарная роторная объемная машина. Она содержит ротор, выполненный в виде некруглого колеса с внешними зубьями, статор, выполненный в виде некруглого колеса с внутренними зубьями, взаимодействующие со статором и ротором круглые плавающие сателлиты, неподвижные торцовые стенки и систему каналов подвода и отвода рабочей среды. Центроиды ротора и статора имеют одинаковое число М участков верхнего выстоя сателлитов, являющихся окружностями максимального радиуса Rmax, столько же участков нижнего выстоя сателлитов, являющихся окружностями минимального радиуса Rmin, и расположенные между ними переходные участки, обеспечивающие плавный переход от Rmax к Rmin. Новым является то, что угловая протяженность Δcos каждого переходного участка центроид равна 35…55°, а угловая протяженность каждого участка минимального радиуса ΔRmin равна угловой протяженности каждого участка максимального радиуса ΔRmax и определяется соотношением:
ΔRmax=ΔRmin=(180°/М) - Δcos.
Количественное соотношение геометрических параметров машины, массы m сателлита и угловой скорости ω1 ротора таково, что средняя центробежная сила Fc инерции, действующая на сателлит, составляет не менее 0,2 от максимальной силы Р давления среды на сателлит.
Наличие участков выстоя сателлитов в сочетании с переходными участками в указанных параметрических пропорциях обеспечивает максимально возможную, для машин подобного типа, величину отношения максимального и минимального объемов рабочих камер. Наличия выстоев сателлитов в планетарных роторных объемных машинах можно добиться в случае равенства числа М волн центроид ротора и статора. Но такое равенство возможно только, если зубья статора нарезаны с большим положительным смещением, что ухудшает условия передачи движения в кинематической паре статор-сателлит. Предлагаемое соотношение геометрических и динамических параметров устройства компенсирует этот недостаток и обеспечивает надежное зацепление сателлита со статором.
Самая большая разница максимального и минимального объемов рабочих камер достигается, когда центроиды ротора и статора имеют по одному участку верхнего выстоя М=1, а ротор установлен относительно статора в подшипниках качения.
В другом возможном варианте объемной машины, центроиды ротора и статора имеют по два участка верхнего выстоя М=2. При этом разница максимального и минимального объемов рабочих камер будет несколько ниже, но зато, не обязательно присутствие подшипников.
Если сателлит изготовлен из полимерного материала, то в выполненное в нем осевое отверстие предлагается вставить утяжеляющий его металлический, например, свинцовый, стержень.
Оптимальные геометрические и динамические параметры предлагаемой объемной машины, соответствуют следующим условиям. Центроиды ротора и статора на переходных участках являются эквидистантами траектории движения центра сателлита по закону:
r2=r0 ⋅ (1+k ⋅ cos(My ⋅ ϕ2)),
где r2 - мгновенный радиус центровой траектории сателлита в его движении относительно эпицикла;
r0 - средний радиус центровой траектории сателлита;
ϕ2 - текущий угол поворота центра сателлита относительно статора;
My=3,5…5 - условное число волн на участках переменного радиуса;
k=0,08…1,2 - коэффициент интенсивности волн.
Необходимое количественное соотношение динамических параметров объемной машины соответствует условию:
где ω1 - угловая скорость ротора;
m - масса сателлита;
p - давление среды;
b - длина сателлита;
dc - делительный диаметр сателлита.
Примеры реализации изобретения иллюстрируются чертежами.
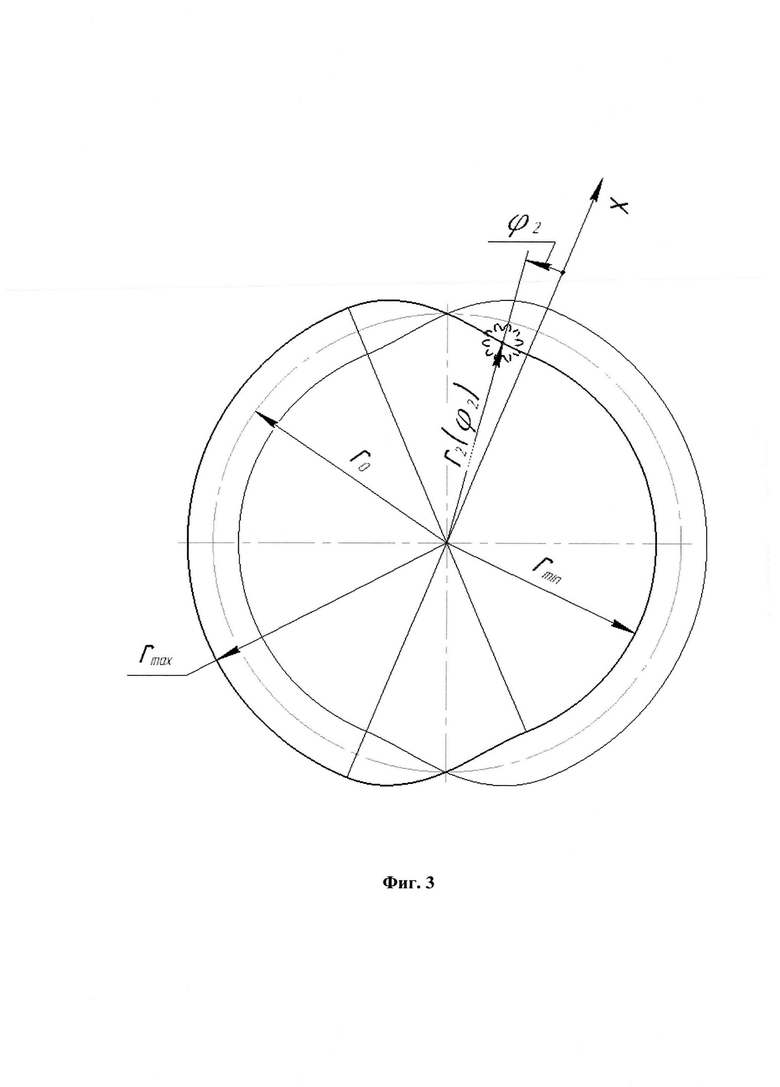
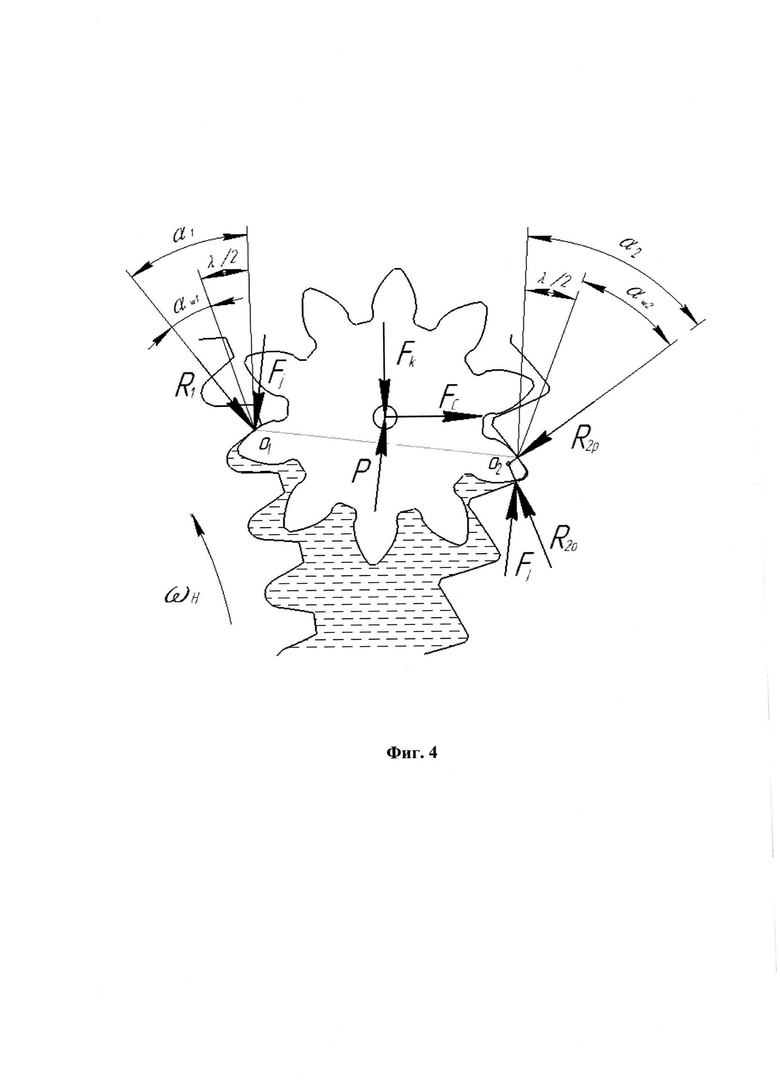
На фигуре 1 изображена планетарная роторная объемная машина в осевом разрезе. На фигуре 2 в разрезе по плоскости А-А показана машина, выполненная по варианту 1×1. На фигуре 3 в разрезе по плоскости А-А показан вариант 2×2. На фигуре 4 показаны силы, действующие на сателлит в наиболее «опасном» положении.
Машина 1×1, показанная на фигурах 1-2, содержит ротор 1, выполненный в виде некруглого колеса с внешними зубьями, статор 2, выполненный в виде некруглого колеса с внутренними зубьями, взаимодействующие со статором 2 и ротором 1 круглые плавающие сателлиты 3, неподвижные торцовые стенки 4 и 5, стянутые шпильками 6, а также систему каналов подвода 7 и отвода 12 рабочей среды. Ротор посредством шлицев 8 закреплен на валу 9, который установлен относительно статора 2 в подшипниках качения 10. Сателлит 3 выполнен из полимерного материала, который имеет сравнительно малую плотность. Но для увеличения общей массы сателлита в его центральное отверстие вставлен свинцовый стержень 11.
Центроиды ротора 1 и статора 2 имеют одинаковое число волн М=1, т.е. один участок верхнего выстоя сателлитов, являющийся окружностью максимального радиуса (Rmax), один участок нижнего выстоя сателлитов, являющийся окружностью минимального радиуса (Rmin), и расположенные между ними переходные участки, обеспечивающие плавный переход от Rmax к Rmin. Угловая протяженность Δcos каждого переходного участка центроид равна 45°, а угловая протяженность участка минимального радиуса ΔRmin равна угловой протяженности участка максимального радиуса ΔRmax и определяется соотношением
ΔRmax=ΔRmin=(180°/M) - Δcos=180/1 - 45°=135°.
Центроиды ротора 1 и статора 2 на переходных участках являются эквидистантами к траектории движения центра сателлита (фиг. 3). В примере эта траектория соответствует наиболее простому закону:
r2=r0 ⋅ (1+k ⋅ cos(My ⋅ ϕ2)),
где r2 - мгновенный радиус центровой траектории сателлита в его движении относительно эпицикла;
r0 - средний радиус центровой траектории сателлита;
ϕ2 - текущий угол поворота центра сателлита относительно статора;
My - условное число волн на участках переменного радиуса (в примере My=4);
k - коэффициент интенсивности волн (в примере k=0,1).
Использованные параметры машины обеспечивают переход с уровня Rmin на уровень Rmax при угле зацепления в кинематической паре сателлит - статор αw2 = 33°, и угле удержания сателлита λ = 34° (фиг. 3).
В режиме вакуумного насоса и компрессора машина работает следующим образом. Вал 9, посредством шлицев 8, передает вращение ротору 1. Взаимодействующие с ротором 1 сателлиты 3 катятся по статору 2, при этом происходит периодическое изменение объема рабочих полостей, расположенных между сателлитами. Воздух всасывается в насос, через отверстия 7, а выходит из насоса через отверстия 12.
В рассматриваемом в качестве примера (фигура 2) насосе отношение максимального и минимального объемов рабочих камер - 7. Это означает, что теоретическая (расчетная) величина вакуума составит 0,86. Такой вакуум широко востребован во многих технических устройствах: промышленных пылесосах, ассенизаторских цистернах, зернопогрузчиках и т.д. Аналогичная машина, используемая в режиме компрессора, с учетом адиабатического характера процесса сжатия среды, обеспечит максимальное давления порядка 10 атм.
Для надежной работы машины нужно, чтобы в кинематической паре статор-сателлит сателлит был плотно прижат к статору (фиг. 4). Количественное соотношение динамических параметров машины, обеспечивающих выполнение этого условия, получено следующим образом. Со стороны ротора 1 на сателлит 3 действует реакция R1. Она приложена в точке O1 контакта зубьев. При благоприятном соотношении силы Р давления среды и динамических параметров машины, в кинематической паре сателлит-статор реакции возникают на двух сторонах зуба: рабочей - сила R2p и обратной - сила R2o. Точка пересечения этих сил обозначена - O2.
В проекции сил на ось O1O2 уравнение равновесия сателлита имеет вид:

где α1 и α2 - углы давления в соответствующих кинематических парах;
Fc - центробежная сила инерции, действующая на сателлит, a Fc' - ее проекция на ось O1O2;
Fk - сила Кориолиса, действующая на сателлит в наиболее неблагоприятной фазе его движения, a Fk' - ее проекция на ось перпендикулярную О1О2;
Fj - сила, полученная в результате разложения на пару сил момента сил
инерции, действующего на сателлит, при движении сателлита с угловым ускорением.
Приближенно считаем Fc'=Fc; Fk'=Fk, а незначительной по величине силой Fj пренебрегаем.
Выражая инерционные силы через характерные геометрические и динамические параметры машины, приходим к выводу, что средняя центробежная сила Fc инерции, действующая на сателлит, должна составлять 0,2 от максимальной силы Р давления среды на сателлит (Fc=0.2Р).
Данное соотношение является условием, при котором сателлит постоянно плотно прижат к статору, а увеличенный угол зацепления в паре сателлит-статор не лимитирует работу насоса. Из этого соотношения следует, что для надежной работы машины угловая скорость ротора должна быть не ниже значения, вычисляемого по формуле:
где ω1 - угловая скорость ротора;
m - масса сателлита;
p - давление среды;
b - длина сателлита;
dc - делительный диаметр сателлита.
Рассмотрим примеры. Средний радиус траектории сателлитов r0=0.1 м, материал сателлита - пластик (например, капролон ρ=1100 кг/м3). Если машина используется в качестве вакуумного насоса, то есть, максимальное давление среды составляет 1 атм, (1×105 Па), то расчетная угловая скорость ротора составит ω1=215 с-1. Если сателлит изготовлен из стали (ρ=7800 кг/м3), то для вакуумного насоса тех же размеров потребуется угловая скорость ротора ω1=82 с-1. Для компрессора, обеспечивающего давление 10 атм. (1×106 Па), с радиусом ro=0.1 м при стальных сателлитах, потребуется угловая скорость ротора ω1=260 с-1.
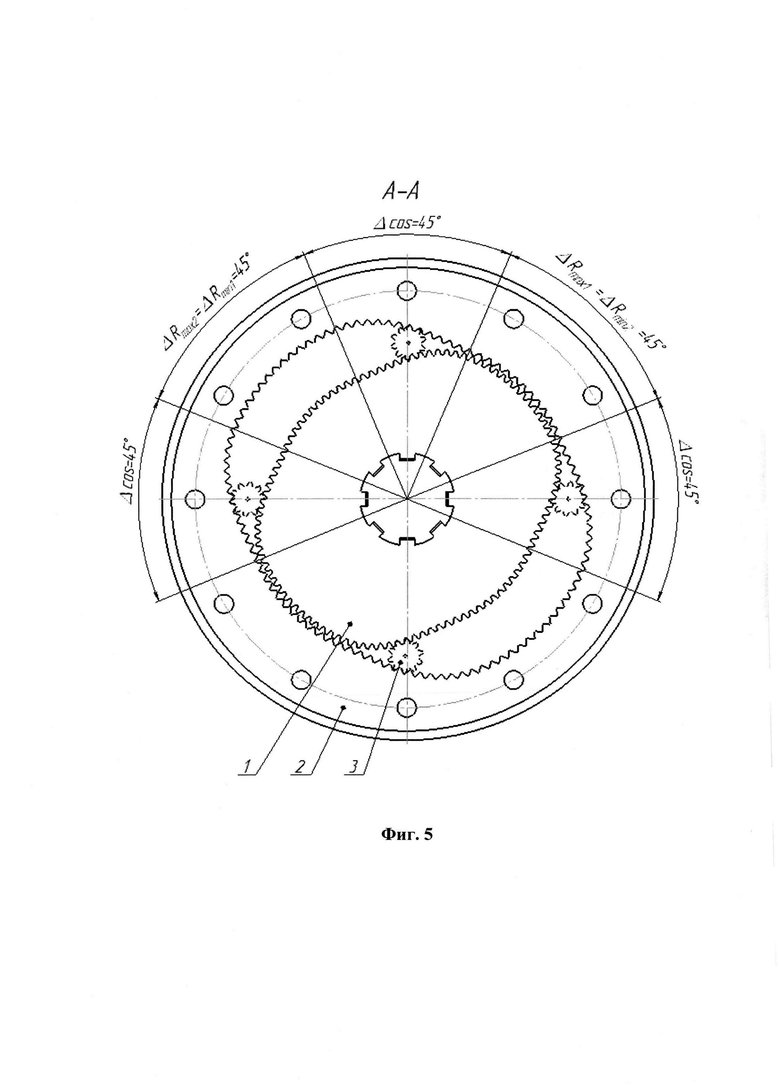
На фиг. 5 показана машина с числом волн 2×2. Для нее справедливы все приведенные выше параметрические условия. Однако отношение максимального и минимального объемов рабочих камер несколько меньше 6 (шести). Зато упрощается конструкция - не обязательны подшипники 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторная гидромашина | 2018 |
|
RU2687189C1 |
| Роторная гидромашина | 2017 |
|
RU2686432C1 |
| РОТОРНАЯ ГИДРОМАШИНА | 2012 |
|
RU2513057C2 |
| РОТОРНАЯ ГИДРОМАШИНА | 2011 |
|
RU2476725C2 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2010 |
|
RU2423634C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| РОТОРНАЯ ГИДРОМАШИНА | 2010 |
|
RU2445512C2 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| ДВУХСКОРОСТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2010 |
|
RU2433326C1 |
| ШЕСТЕРЕННАЯ ГИДРОМАШИНА | 2010 |
|
RU2442907C1 |

Изобретение относится к объемным машинам, а именно к вакуумным насосам, компрессорам. Машина содержит ротор 1, выполненный в виде некруглого колеса с внешними зубьями, статор 2, выполненный в виде некруглого колеса с внутренними зубьями, взаимодействующие со статором 2 и ротором 1 круглые плавающие сателлиты 3, неподвижные торцовые стенки 4 и 5, а также систему каналов подвода и отвода 7 и 12 рабочей среды. Центроиды ротора 1 и статора 2 имеют одинаковое число участков верхнего выстоя сателлитов 3, являющихся окружностями максимального радиуса, столько же участков нижнего выстоя сателлитов 3, являющихся окружностями минимального радиуса, и расположенные между ними переходные участки, обеспечивающие плавный переход от максимального радиуса к минимальному. Угловая протяженность каждого переходного участка центроид задана определенным интервалом. Угловая протяженность каждого участка минимального радиуса равна угловой протяженности каждого участка максимального радиуса и задана определенным соотношением. Средняя центробежная сила инерции, действующая на сателлит 3, зависит определенным образом от максимальной силы давления среды на сателлит 3. Изобретение направлено на повышение степени сжатия рабочей среды. 5 з.п. ф-лы, 5 ил.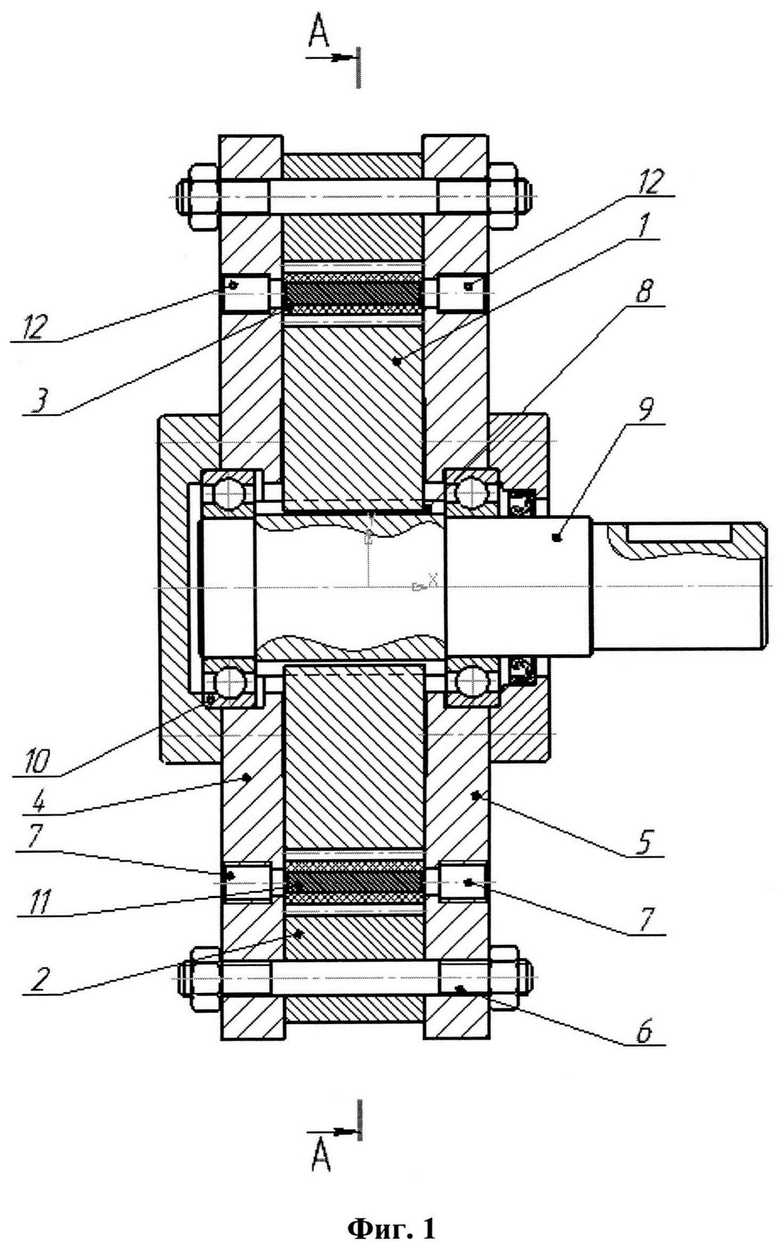
1. Планетарная роторная объемная машина с плавающими сателлитами, содержащая ротор, выполненный в виде некруглого колеса с внешними зубьями, статор, выполненный в виде некруглого колеса с внутренними зубьями, взаимодействующие со статором и ротором круглые плавающие сателлиты, неподвижные торцовые стенки и систему каналов подвода и отвода рабочей среды, при этом центроиды ротора и статора имеют одинаковое число М участков верхнего выстоя сателлитов, являющихся окружностями максимального радиуса Rmax, столько же участков нижнего выстоя сателлитов, являющихся окружностями минимального радиуса Rmin, и расположенные между ними переходные участки, обеспечивающие плавный переход от Rmax к Rmin, отличающаяся тем, что угловая протяженность Δcos каждого переходного участка центроид равна 35…55°, а угловая протяженность каждого участка минимального радиуса ΔRmin равна угловой протяженности каждого участка максимального радиуса ΔRmax и определяется соотношением
ΔRmax = ΔRmin = (180°/М) - Δcos,
при этом количественное соотношение геометрических и динамических параметров машины таково, что средняя центробежная сила Fc инерции, действующая на сателлит, составляет не менее 0,1 от максимальной силы Р давления среды на сателлит.
2. Машина по п. 1, отличающаяся тем, что центроиды ротора и статора имеют по одному участку верхнего выстоя М=1, а ротор установлен относительно статора в подшипниках качения.
3. Машина по п. 2, отличающаяся тем, что сателлит изготовлен из полимерного материала, а в выполненное в нем осевое отверстие вставлен утяжеляющий его металлический, например, свинцовый, стержень.
4. Машина по п. 1, отличающаяся тем, что центроиды ротора и статора имеют по два участка верхнего выстоя М=2.
5. Машина по п. 4, отличающаяся тем, что сателлит изготовлен из полимерного материала, а в выполненное в нем осевое отверстие вставлен утяжеляющий его металлический, например, свинцовый, стержень.
6. Машина по любому из пп. 1-5, отличающаяся тем, что количественное соотношение ее геометрических и динамических параметров соответствует следующим условиям:
центроиды ротора и статора на переходных участках являются эквидистантами траектории движения центра сателлита по закону
r2 = r0 ⋅ (1+k ⋅ cos(My ⋅ ϕ2)),
где r2 - мгновенный радиус центровой траектории сателлита в его движении относительно эпицикла;
r0 - средний радиус центровой траектории сателлита;
ϕ2 - текущий угол поворота центра сателлита относительно статора;
My=3,5…5 - условное число волн на участках переменного радиуса;
k=0,08…1,2 - коэффициент интенсивности волн,
а угловая скорость ω1 ротора составляет
где m - масса сателлита;
р - давление среды;
b - длина сателлита;
dc - делительный диаметр сателлита.
| Роторная гидромашина | 2018 |
|
RU2687189C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ДЛЯ ПРИДАНИЯ | 0 |
|
SU198868A1 |
| Прибор для измерения большой и малой полуосей эллипса поляризации магнитного поля | 1960 |
|
SU139028A1 |
| CN 103362731 A, 23.10.2013 | |||
| CN 1077244 A, 13.10.1993. | |||

